MATH 345: Assignment 3 Solutionsyxli/m345/m345_hw3_solns.pdf · MATH 345: Assignment 3 Solutions...
14
MATH 345: Assignment 3 Solutions ˙ φ = ν, ˙ ν = -δν + γ sin φ cos φ - sin φ, (φ, ν ) ∈ S 1 × R (1) mr d 2 φ dt 2 + b dφ dt - mrω 2 sin φ cos φ + mg sin φ =0, φ ∈ S 1 (2) Q1 To nondimensionalize eqn. (2), we let τ = t B , where B> 0 has units of [time]. We will choose the value for B later. Applying the chain rule: dφ dt = dφ dτ dτ dt = 1 B dφ dτ , ⇒ d 2 φ dt 2 = 1 B 2 d 2 φ dτ 2 Making the appropriate substitutions into equation (2) gives us: mr B 2 d 2 φ dτ 2 + b B dφ dτ - mrω 2 sin φ cos φ + mg sin φ =0, φ ∈ S 1 To get the equation into the appropriate form we divide it by mg, thus giving us the coefficient 1 in front of the sin φ term. r gB 2 d 2 φ dτ 2 + b mgB dφ dτ - rω 2 g sin φ cos φ + sin φ =0, φ ∈ S 1 We now choose B such that we get coefficient 1 in front of the d 2 φ dτ 2 term. (i.e: We solve r gB 2 =1 for B. This gives us B = p rg -1 . This is a sensible substitution as r has units of [length], g has units [length][time] -2 which gives B units of [time]. Making this substitution for B gives us: d 2 φ dτ 2 + b m √ rg dφ dτ - rω 2 g sin φ cos φ + sin φ =0, φ ∈ S 1 Therefore, we have our required form: d 2 φ dτ 2 + δ dφ dτ - γ sin φ cos φ + sin φ =0, δ = b m √ rg ,γ = rω 2 g ,τ = r g r t, φ ∈ S 1 (3) (a) Fixed points To get the fixed points for eqn. (1), we set ˙ φ =˙ ν = 0 and solve the resulting equations for φ, ν . 0= ν, 0= -δν + γ sin φ cos φ - sin φ, (φ, ν ) ∈ S 1 × R ν =0, γ sin φ cos φ - sin φ =0 ⇒ sin φ =0, or γ cos φ - 1=0 sin φ = 0 has solutions φ =0,π mod 2π. Notice that the γ cos φ - 1 = 0 only has solutions for γ ≥ 1. These solutions are φ = ± Arccos (γ -1 ). When γ = 1, these solutions coincide with the φ = 0 solution. Therefore, we have three cases. (i) 0 ≤ γ< 1: There are two fixed points: (φ, ν ) = (0 mod 2π, 0) and (φ, ν )=(π mod 2π, 0) 1
Transcript of MATH 345: Assignment 3 Solutionsyxli/m345/m345_hw3_solns.pdf · MATH 345: Assignment 3 Solutions...

MATH 345: Assignment 3 Solutions
φ = ν, ν = −δν + γ sinφ cosφ− sinφ, (φ, ν) ∈ S1 × R (1)
mrd2φ
dt2+ b
dφ
dt−mrω2 sinφ cosφ+mg sinφ = 0, φ ∈ S1 (2)
Q1
To nondimensionalize eqn. (2), we let τ = tB
, where B > 0 has units of [time]. We will choose thevalue for B later. Applying the chain rule:
dφ
dt=dφ
dτ
dτ
dt=
1
B
dφ
dτ, ⇒ d2φ
dt2=
1
B2
d2φ
dτ 2
Making the appropriate substitutions into equation (2) gives us:
mr
B2
d2φ
dτ 2+b
B
dφ
dτ−mrω2 sinφ cosφ+mg sinφ = 0, φ ∈ S1
To get the equation into the appropriate form we divide it by mg, thus giving us the coefficient1 in front of the sinφ term.
r
gB2
d2φ
dτ 2+
b
mgB
dφ
dτ− rω2
gsinφ cosφ+ sinφ = 0, φ ∈ S1
We now choose B such that we get coefficient 1 in front of the d2φdτ2
term. (i.e: We solve rgB2 = 1
for B. This gives us B =√rg−1. This is a sensible substitution as r has units of [length], g has
units [length][time]−2 which gives B units of [time]. Making this substitution for B gives us:
d2φ
dτ 2+
b
m√rg
dφ
dτ− rω2
gsinφ cosφ+ sinφ = 0, φ ∈ S1
Therefore, we have our required form:
d2φ
dτ 2+ δ
dφ
dτ− γ sinφ cosφ+ sinφ = 0, δ =
b
m√rg, γ =
rω2
g, τ =
√g
rt, φ ∈ S1 (3)
(a) Fixed points
To get the fixed points for eqn. (1), we set φ = ν = 0 and solve the resulting equations for φ, ν.
0 = ν, 0 = −δν + γ sinφ cosφ− sinφ, (φ, ν) ∈ S1 × Rν = 0, γ sinφ cosφ− sinφ = 0 ⇒ sinφ = 0, or γ cosφ− 1 = 0
sinφ = 0 has solutions φ = 0, π mod 2π. Notice that the γ cosφ− 1 = 0 only has solutions forγ ≥ 1. These solutions are φ = ±Arccos (γ−1). When γ = 1, these solutions coincide with theφ = 0 solution. Therefore, we have three cases.
(i) 0 ≤ γ < 1: There are two fixed points: (φ, ν) = (0 mod 2π, 0) and (φ, ν) = (π mod 2π, 0)
1

(ii) γ = 1: There are still two fixed points: (φ, ν) = (0 mod 2π, 0) and (φ, ν) = (π mod 2π, 0)
(iii) γ > 1: There are four fixed points: (φ, ν) = (0 mod 2π, 0), (φ, ν) = (π mod 2π, 0) and(φ, ν) = (±Arccos (γ−1) mod 2π, 0)
(b) Linear stability analysis
Calculating the linear part of the evolution function near a fixed point (φ∗, ν∗) gives us:
A = Df(φ∗, ν∗) =
[0 1
γ(cos2 φ∗ − sin2 φ∗)− cosφ∗ −δ
]=
[0 1
γ cos 2φ∗ − cosφ∗ −δ
]Calculating the determinant, DetA, and trace, TrA, gives us:
DetA = cosφ∗ − γ cos 2φ∗, TrA = −δ
(i) 0 ≤ γ < 1:
• At (φ∗, ν∗) = (0 mod 2π, 0), we have DetA = 1− γ > 0, TrA = −δ.When δ = 0, TrA = 0 and this fixed point is a linear centre.When δ > 0, this point is a hyperbolic attractor
• At (φ∗, ν∗) = (π mod 2π, 0), we have DetA = −1− γ < 0, TrA = −δ.For all δ ≥ 0, this fixed point is a hyperbolic saddle point.
(ii) γ = 1:
• At (φ∗, ν∗) = (0 mod 2π, 0), we have DetA = 0, TrA = −δ.When δ = 0, this point is a non-hyperbolic fixed point with a double zero eigenvalue.When δ > 0, this point is a non-hyperbolic fixed point with a single zero eigenvalue.
• At (φ∗, ν∗) = (π mod 2π, 0), we have DetA = −1− γ = −2, TrA = −δ.For all δ ≥ 0, this fixed point is a hyperbolic saddle point.
(iii) γ > 1:
• At (φ∗, ν∗) = (0 mod 2π, 0), we have DetA = 1− γ < 0, TrA = −δ.For all δ ≥ 0, this fixed point is a hyperbolic saddle point.
• At (φ∗, ν∗) = (π mod 2π, 0), we have DetA = −1− γ < 0, TrA = −δ.For all δ ≥ 0, this fixed point is a hyperbolic saddle point.
• At (φ∗, ν∗) = (Arccos (γ−1) mod 2π, 0) we have DetA = γ − γ−1 > 0, TrA = −δ.(Useful: cosφ∗ = γ−1, sinφ∗ =
√γ2−1γ
)
When δ = 0, this point is a linear centre.When δ > 0, this point is a hyperbolic attractor
• At (φ∗, ν∗) = (−Arccos (γ−1) mod 2π, 0) we have DetA = γ − γ−1 > 0, TrA = −δ.(Useful: cosφ∗ = γ−1, sinφ∗ = −
√γ2−1γ
)
When δ = 0, this point is a linear centre.When δ > 0, this point is a hyperbolic attractor
2


(d) Conserved quantity for the undamped system
The system (1) is undamped if δ = 0. To show the system is conservative we need to find afunction E(φ, ν) such that the following hold:
dE
dν= φ = ν,
dE
dφ= −ν = −γ sinφ cosφ+ sinφ
Solving the first differential equation gives us:
E(φ, ν) =1
2ν2 + g(φ)
Plugging this solution into the second equation gives us:
dg
dφ= −γ sinφ cosφ+ sinφ ⇒ g(φ) =
γ
2cos2 φ− cosφ+ C
(Set C = 0). So we find that the conserved quantity is:
E(φ, ν) =1
2ν2 +
γ
2cos2 φ− cosφ
(You can check that this solution is correct by evaluating E = dEdt
and confirming that it isequal to 0, indicating that it is a conserved quantity that does not change in time. E is sometimesrefered to as the Hamiltonian)
(e) Trajectories of the damped system
Let V (φ, ν) = E(φ, ν) from part (d). Calculate V = dVdt
.
V =∂V
∂φ
dφ
dt+∂V
∂ν
dν
dt= (−γ sinφ cosφ+ sinφ)ν + ν(−δν + γ sinφ cosφ− sinφ) = −δν2
Since we have δ > 0, we can see that V ≤ 0 for all (φ, ν) ∈ S1 × R with equality when ν = 0.When ν 6= 0, we have V < 0, so V is decreasing along (φ(t), ν(t)), except where ν(t) = 0.
When ν = 0, but is not a fixed point, then ν 6= 0, so the trajectory moves away from ν = 0 and Vis again decreasing. ν(t) = 0 can only occur at some isolated time t = t0. For t < t0, near t0, wehave V (φ(t), ν(t)) > V (φ(t0), ν(t0)) and for t > t0, near t0, we have V (φ(t), ν(t)) < V (φ(t0), ν(t0)).So we know that for an open interval containing t0, V is decreasing.
Thus V (φ(t), ν(t)) is decreasing in time provided that (φ(t), ν(t)) is not a fixed point.
4



Q2
εd2φ
dτ 2+dφ
dτ− γ sinφ cosφ+ sinφ = 0, φ ∈ S1 (4)
To give the first order system that is equivalent to eqn. (4), we let ν = dφdτ∈ R and make the
appropriate changes to get the following:
dφ
dτ= ν,
dν
dτ=
1
ε(−ν + γ sinφ cosφ− sinφ) , (φ, ν) ∈ S1 × R (5)
(a) A different nondimensionalization
We could perform an analysis where we find the fixed points and look at the determinant andtrace of the linear part of the evolution equation near those fixed points. However as per therecommendation we will instead opt to determine the relationships between the parameters of thesystems (3) and (4).
To do this, we can assume a new rescaling of dimensionless time τ = τoldA
, where A is dimen-sionless, and τold is the dimensionless time from Question 1. Applying the chain rule to (3), weget:
1
A2
d2φ
dτ 2+δ
A
dφ
dτ− γ sinφ cosφ+ sinφ = 0
By inspection we can achieve the dimensionless form of (5) if we choose A = δ. This makesε = 1
δ2, δ > 0. We find that the correspondence with (1) is δ = ε−1/2, ε > 0. (Our rescaled
dimensionless time will be s = τδ
= mgbt. γ does not change.)
(φ∗, ν∗) = (0 mod 2π, 0): This fixed point exists for all γ ≥ 0, ε > 0 and is classified as:
• a hyperbolic attractor if 0 ≤ γ < 1, ε > 0;
• a non-hyperbolic fixed point with single zero eigenvalue if γ = 1, ε > 0
• a hyperbolic saddle point if γ > 1, ε > 0
(φ∗, ν∗) = (π mod 2π, 0): This fixed point exists for all γ ≥ 0, ε > 0 and is classified as ahyperbolic saddle point.
(φ∗, ν∗) = (±Arccos(γ−1) mod 2π, 0): These fixed points exist for all γ ≥ 0, ε > 0 and both areclassified as a hyperbolic attractors. (They are stable spirals if 0 < ε < 1
2, and stable nodes
if ε > 12.)
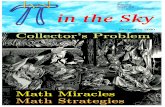
(b)
See the attached XPP plots. As ε gets close to zero we can see that the results using the RK4 andthe default step size are obviously not correct. To rectify this, try using a smaller step size (i.emake Dt smaller) or try using the (S)tiff method. To check that your plots are indeed correct,make a qualitative comparison of plots generated using these methods.
7

-4
-3
-2
-1
0
1
2
3
4
-4 -3 -2 -1 0 1 2 3 4
nu
phi
epsilon = 1

-4
-3
-2
-1
0
1
2
3
4
-4 -3 -2 -1 0 1 2 3 4
nu
phi
epsilon = 0.5

-4
-3
-2
-1
0
1
2
3
4
-4 -3 -2 -1 0 1 2 3 4
nu
phi
epsilon = 0.1

-4
-3
-2
-1
0
1
2
3
4
-4 -3 -2 -1 0 1 2 3 4
nu
phi
epsilon = 0.01

(c) Discussion of the overdamped system
In general, the initial condition, (φ(0), ν(0)) = (φ0, ν0) will be away from the nullclines of thesystem. In other words (−ν + γ sinφ cosφ − sinφ) is not small, so 1
ε(−ν + γ sinφ cosφ− sinφ)
will be very large.
ν > γ sinφ cosφ− sinφ ⇒ ν < 0, When ν is above the nullcline, ν is decreasing
ν < γ sinφ cosφ− sinφ ⇒ ν > 0, When ν is below the nullcline, ν is increasing
So we can see that solutions to the system are attracted to the state ν = 0 and that they areattracted to this state very quickly because of the 1
εfactor. So the solution will move very quickly
in the ν-coordinate towards the nullcline.When the solution is near the nullcline, we have that ν ≈ γ sinφ cosφ − sinφ, and thus ν is
not large. Since φ = ν, we can see that (6) is now a good approximation for (4).
dφ
dτ= γ sinφ cosφ− sinφ, φ ∈ S1 (6)
So after a fast initial transcient where the system moves rapidly towards ν = γ sinφ cosφ−sinφ,(6) becomes a good approximation to the describe the evolution of φ(τ).
(For this assignment solution, the figures for 1c), 1f), and 2b) were generated by Prof. WayneNagata)
Q3
Solution:
(a) In order to find the critical points, we shall find the x- and y-nullclines.The x-nullclines are: x = 0 (line) and y = 2− x (line).The y-nullclines are: y = 0 (line) and x = 1/2 (line).Thus the critical points in this case are: (0, 0), (2, 0) and (1/2, 3/2).See the sketch for plotting these points in Fig. 2.
(b) Let’s begin first by finding the Jacobian matrix:
J =
(1− x− 0.5y −0.5x
0.5y −0.25 + 0.5x
)(i) At (0, 0):
J(0,0) =
(1 00 −0.25
). The eigenvalues are λ1 = 1 > 0 and λ2 = −0.25 < 0.
Therefore (0, 0) is an unstable saddle point. The eigenvectors are (1, 0)T and (0, 1)T .
(ii) At (2, 0):
J(2,0) =
(−1 −10 0.75
). The eigenvalues are λ1 = −1 < 0 and λ2 = 0.75 > 0.
Therefore (2, 0) is an unstable saddle point. The eigenvectors are (1, 0)T and (1,−1.75)T .
12

−3 −2 −1 0 1 2 3
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
φ
ν
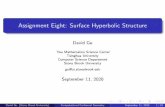
γ = 2, δ = 0.1
Figure 1: Identify φ = π with φ = −π.
2
y
(0.5, 1.5)
0
2
x
Figure 2: A rough sketch of the phase portrait of the system.
(ii) At (1/2, 3/2):
J(1/2,3/2) =
(−1/4 −1/43/4 0
). The eigenvalues are λ1 =
−1
8+i
√11
8and λ2 =
−1
8−i√
11
8.
We have two complex conjugate roots with negative real parts. Therefore (1/2, 3/2) isan asymptotically stable spiral sink.
(c) See the sketch of phase portrait in Fig. 2.
(d) Starting from any point in the first quadrant (i.e. with any x0, y0 > 0), the long
13

term behavior of x = (x, y)T will approach that equilibrium solution. In other words,limt→∞ x(t) = (1/2, 3/2) since the critical point (1/2, 3/2) is the only asymptotically sta-ble critical point in the region. This means that the two species in this predator-prey modelwill both survive and their populations will gradually approach (1/2, 3/2). The solutionscurves for x and y will oscillate with decaying amplitudes toward this equilibrium point.
(e) When γ = 0, one critical point will disappear and end up with only two. These two criticalpoints are (0, 0) and (1/2, 2) (the y-nullcline y = 2− x in the previous case becomes y = 2).The current model is identical to classical predator-prey model. The critical point (0, 0) staysas an unstable equilibrium solution, but the critical point (1/2, 2) is a stable center. Thephase portrait will show closed orbits surrounding the center, reflecting oscillatory behaviorin both populations, x and y, with constant amplitudes and frequencies.
(f) See the graph in Fig. 3.
(g) Compare the graphs in Fig. 2 and Fig. 3.
-1
-0.5
0
0.5
1
1.5
2
2.5
3
-1 -0.5 0 0.5 1 1.5 2 2.5 3
Figure 3: Phase portrait of the system obtained with XPP.
14