MATH 161 Calculus I - Millersville University of...
27
Derivatives of the Trigonometric Functions MATH 161 Calculus I J. Robert Buchanan Department of Mathematics Summer 2018
Transcript of MATH 161 Calculus I - Millersville University of...

Derivatives of the Trigonometric FunctionsMATH 161 Calculus I
J. Robert Buchanan
Department of Mathematics
Summer 2018

Background
We can establish formally the limits of the trigonometricfunctions using circles, angles, and geometry.
Recall:I The length s of the arc of a circle of radius r which
subtends a central angle θ is s = r θ.I The area A of a sector of a circle of radius r subtended by
a central angle θ is A = 12 r2θ.
I The coordinates of the point on the circle of radius rcentered at the origin at the intersection of a ray making anangle θ with the positive x-axis are
(x , y) = (r cos θ, r sin θ).
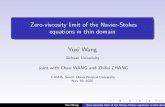
Limits and TrigonometryWe can establish formally the limits of the trigonometricfunctions using the unit circle and geometry.
θ
θ
sin θ
(cos θ,sin θ)
x
y

Basic Limits (1 of 2)
Lemmalimθ→0
sin θ = 0.
Proof.If 0 < θ < π
2 then
0 ≤ sin θ ≤ θlimθ→0
0 ≤ limθ→0
sin θ ≤ limθ→0
θ
0 ≤ limθ→0
sin θ ≤ 0
and use the Squeeze Theorem.

Basic Limits (2 of 2)
Lemmalimθ→0
cos θ = 1.
Proof.If 0 < θ < π
2 then
limθ→0
cos θ = limθ→0
√1− sin2 θ
=
√1−
(limθ→0
sin θ
)2
=√
1− 02 = 1.

Justification of a Common Limit (1 of 3)
θ
R(1,0)O
P(cos θ,sin θ)
Q(1,tan θ)
x
y
4OPR =12
(1) sin θ
4OQR =12
(1) tan θ
OPR =12
(12)θ
Justification of a Common Limit (2 of 3)
Lemma
limθ→0
sin θ
θ= 1

Justification of a Common Limit (3 of 3)
Proof.
0 < area ∆OPR < area OPR < area ∆OQR
0 <12
sin θ <θ
2<
12
tan θ
0 < sin θ < θ < tan θ
0 < 1 <θ
sin θ<
tan θ
sin θ=
1cos θ
cos θ <sin θ
θ< 1
limθ→0
cos θ < limθ→0
sin θ
θ< lim
θ→01
1 ≤ limθ→0
sin θ
θ≤ 1
and use the Squeeze Theorem.

Limit Involving cos θ
Lemma
limθ→0
1− cos θ
θ= 0
Proof.
limθ→0
1− cos θ
θ= lim
θ→0
(1− cos θ)
θ
(1 + cos θ)
(1 + cos θ)
= limθ→0
1− cos2 θ
θ(1 + cos θ)
= limθ→0
sin2 θ
θ(1 + cos θ)
= limθ→0
sin θ
θ
sin θ
1 + cos θ= (1)(0) = 0
Limit Involving cos θ
Lemma
limθ→0
1− cos θ
θ= 0
Proof.
limθ→0
1− cos θ
θ= lim
θ→0
(1− cos θ)
θ
(1 + cos θ)
(1 + cos θ)
= limθ→0
1− cos2 θ
θ(1 + cos θ)
= limθ→0
sin2 θ
θ(1 + cos θ)
= limθ→0
sin θ
θ
sin θ
1 + cos θ= (1)(0) = 0

Sum of Angles Formulas
We will need the following trigonometric identities known as thesum of angles formulas:
sin(A + B) = sin A cos B + cos A sin Bcos(A + B) = cos A cos B − sin A sin B

Basic Derivatives (1 of 2)
Theorem
ddx
[sin x ] = cos x
Proof
ddx
[sin x ] = limh→0
sin(x + h)− sin xh
= limh→0
sin x cos h + cos x sin h − sin xh
= limh→0
(sin x cos h − sin x) + cos x sin hh
= limh→0
sin x(cos h − 1) + cos x sin hh
= (sin x) limh→0
cos h − 1h
+ (cos x) limh→0
sin hh
= (sin x)(0) + (cos x)(1)
= cos x
Basic Derivatives (2 of 2)
Theorem
ddx
[cos x ] = − sin x

Proof
ddx
[cos x ] = limh→0
cos(x + h)− cos xh
= limh→0
cos x cos h − sin x sin h − cos xh
= limh→0
(cos h − 1) cos x − sin x sin hh
= limh→0
cos xcos h − 1
h− lim
h→0sin x
sin hh
= cos x(0)− sin x(1)
= − sin x

Derivatives of the Remaining Trigonometric Functions
ddx
[tan x ] = sec2 x
ddx
[cot x ] = − csc2 x
ddx
[sec x ] = sec x tan x
ddx
[csc x ] = − csc x cot x
Justification
We can find the derivative of the function f (x) = tan x using thequotient rule:
ddx
[tan x ] =ddx
[sin xcos x
]
=cos x cos x − sin x(− sin x)
cos2 x
=cos2 x + sin2 x
cos2 x
=1
cos2 x= sec2 x .

Justification
We can find the derivative of the function f (x) = tan x using thequotient rule:
ddx
[tan x ] =ddx
[sin xcos x
]=
cos x cos x − sin x(− sin x)
cos2 x
=cos2 x + sin2 x
cos2 x
=1
cos2 x= sec2 x .
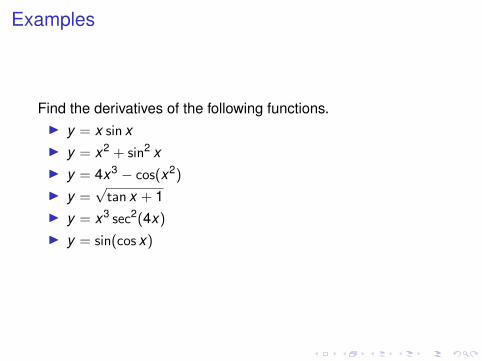
Examples
Find the derivatives of the following functions.I y = x sin xI y = x2 + sin2 xI y = 4x3 − cos(x2)
I y =√
tan x + 1I y = x3 sec2(4x)
I y = sin(cos x)

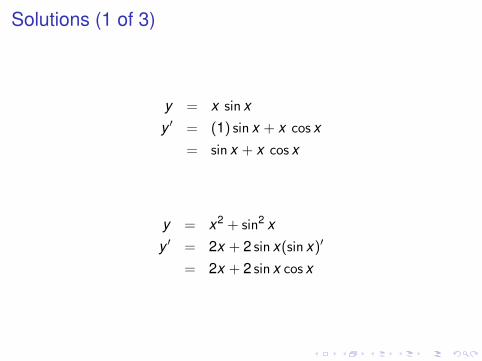
Solutions (1 of 3)
y = x sin xy ′ = (1) sin x + x cos x
= sin x + x cos x
y = x2 + sin2 xy ′ = 2x + 2 sin x(sin x)′
= 2x + 2 sin x cos x
Solutions (1 of 3)
y = x sin xy ′ = (1) sin x + x cos x
= sin x + x cos x
y = x2 + sin2 xy ′ = 2x + 2 sin x(sin x)′
= 2x + 2 sin x cos x
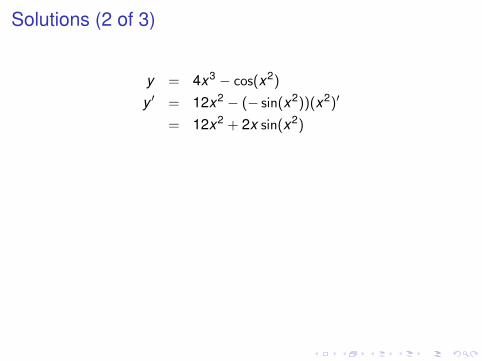
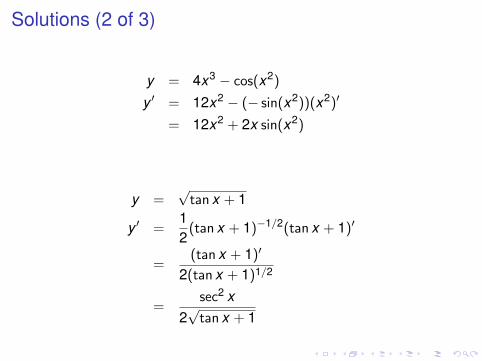
Solutions (2 of 3)
y = 4x3 − cos(x2)
y ′ = 12x2 − (− sin(x2))(x2)′
= 12x2 + 2x sin(x2)
y =√
tan x + 1
y ′ =12
(tan x + 1)−1/2(tan x + 1)′
=(tan x + 1)′
2(tan x + 1)1/2
=sec2 x
2√
tan x + 1
Solutions (2 of 3)
y = 4x3 − cos(x2)
y ′ = 12x2 − (− sin(x2))(x2)′
= 12x2 + 2x sin(x2)
y =√
tan x + 1
y ′ =12
(tan x + 1)−1/2(tan x + 1)′
=(tan x + 1)′
2(tan x + 1)1/2
=sec2 x
2√
tan x + 1
Solutions (3 of 3)
y = x3 sec2(4x)
y ′ = 3x2 sec2(4x) + x3(2 sec(4x))(sec(4x))′
= 3x2 sec2(4x) + 2x3 sec(4x)(sec(4x))′
= 3x2 sec2(4x) + 2x3 sec(4x)(sec(4x) tan(4x))(4x)′
= 3x2 sec2(4x) + 8x3 sec2(4x) tan(4x)
y = sin(cos x)
y ′ = cos(cos x)(cos x)′
= cos(cos x)(− sin x)
= − sin x cos(cos x)
Solutions (3 of 3)
y = x3 sec2(4x)
y ′ = 3x2 sec2(4x) + x3(2 sec(4x))(sec(4x))′
= 3x2 sec2(4x) + 2x3 sec(4x)(sec(4x))′
= 3x2 sec2(4x) + 2x3 sec(4x)(sec(4x) tan(4x))(4x)′
= 3x2 sec2(4x) + 8x3 sec2(4x) tan(4x)
y = sin(cos x)
y ′ = cos(cos x)(cos x)′
= cos(cos x)(− sin x)
= − sin x cos(cos x)
Applications
The trigonometric functions arise naturally in many mechanicaland electrical systems.
Suppose s(t) = a sin(ωt) + b cos(ωt) then
v(t) = aω cos(ωt)− bω sin(ωt)a(t) = −aω2 sin(ωt)− bω2 cos(ωt)
anda(t) + ω2s(t) = s′′(t) + ω2s(t) = 0.
Homework
I Read Section 2.6I Exercises: 1–35 odd




![The Hurwitz Complex Continued Fractiondoug.hensley/SanAntonioShort.pdf · continued fractions [a0;a1,...,ar]. We establish a result for the Hurwitz algorithm analogous to the Gauss-Kuz’min](https://static.fdocument.org/doc/165x107/5f08effb7e708231d42472b4/the-hurwitz-complex-continued-fraction-doughensley-continued-fractions-a0a1ar.jpg)

![Functional Limit Theorems for Shot Noise Processes with ... · mapping in [60]). We establish a stochastic process limit for the similarly centered and scaled shot noise processes](https://static.fdocument.org/doc/165x107/5f3fc7b6e487a95298767d4b/functional-limit-theorems-for-shot-noise-processes-with-mapping-in-60-we.jpg)