Material Básico Sup. Pesq. - uel.br · [email protected] 10.03.2011. ... X H a H σ H = a 12σ 1...
Transcript of Material Básico Sup. Pesq. - uel.br · [email protected] 10.03.2011. ... X H a H σ H = a 12σ 1...
-
TPICOS MECNA
ANTONIO EDSON GONALVES
5 de setembro de 2018
-
2
Antonio Edson Gonalves
Depto de Fsica - Centro de Cincias Exatas
Universidade Estadual de Londrina
Cx. Posta 86100 -Londrina - Paran
10.03.2011
-
Sumrio
1 Prlogo para Mecnica Analtica 91.1 Formas Diferenciais . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1.1 Introduo . . . . . . . . . . . . . . . . . . . . . . . . 91.1.2 O Espao dos p-Vetores . . . . . . . . . . . . . . . . . 111.1.3 Derivada Exterior . . . . . . . . . . . . . . . . . . . . . 151.1.4 Simplicies Euclideanos e o Teorema de Stokes . . . . . 19
1.2 Coordenadas generalizadas . . . . . . . . . . . . . . . . . . . . 221.3 Espao de configuraes . . . . . . . . . . . . . . . . . . . . . 22
1.3.1 Deslocamento virtual . . . . . . . . . . . . . . . . . . 23
2 Tpicos Selecionados de Clculo Variacional e Equaes deLagrange 272.1 As Equaes de Euler . . . . . . . . . . . . . . . . . . . . . . . 30
2.1.1 Notao Variacional . . . . . . . . . . . . . . . . . . . 322.2 O Princpio de Hamilton e as Equaes de Lagrange. . . . . . 38
2.2.1 Lagrangiana e equaes de movimento de uma part-cula livre. . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.2.2 Lagrangianas Equivalentes . . . . . . . . . . . . . . . . 482.2.3 Multiplicadores de Lagrange e vnculos holnomos . . . 49
2.3 Invarincia, Teorema de Noether e Cargas Conservadas . . . . 52
3 Equaes de Movimento de Hamilton 573.1 Introduo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573.2 Transformaes de Legendre . . . . . . . . . . . . . . . . . . . 57
Appendix 58
Referncias Bibliogrficas 58
ndice 60
3
-
4 SUMRIO
-
Lista de Figuras
1.1.1 Exemplos de Simplexos . . . . . . . . . . . . . . . . . . . . . . 201.3.1 Trajetria fsica do pndulo simples . . . . . . . . . . . . . . . 251.3.2 Trajetria fsica do pndulo esfrico . . . . . . . . . . . . . . . 25
2.0.1 Trajetrias Modificadas . . . . . . . . . . . . . . . . . . . . . . 282.0.2 Trajetria deformada ou variada . . . . . . . . . . . . . . . . . 29
5
-
6 LISTA DE FIGURAS
-
Lista de Tabelas
1.1.1 Dimenses do espao p(R2) . . . . . . . . . . . . . . . . . . 141.1.2 Dimenses do espao p(E ) . . . . . . . . . . . . . . . . . . . 14
7
-
8 LISTA DE TABELAS
-
Captulo 1
Prlogo para Mecnica Analtica
1.1 Formas Diferenciais
Nesta seo apresenta-se formas diferenciais em um contexto pragmtico:definio e como usar. Certamente que esta abordagem no a mais apro-priada, entretanto o objetivo introduzir formas diferenciais num contextointrodutrio para utiliz-la em mecnica analtica.
1.1.1 Introduo
O objetivo desta seo discutir o que se entende por formas diferenciais.Num contexto informal mas intuitivo define-se formas diferenciais como asquantidades que acorrem dentro de um integrando. Por exemplo a integralde linha
Adx + Bdy + Cdz
a qual fornece a uma-forma
= Adx + Bdy + Cdz;
a integral de superfcie
Pdydz + Qdzdx + Rdxdy
a qual fornece uma duas-formas
= Pdydz + Qdzdx + Rdxdy;
9
-
10 CAPTULO 1. PRLOGO PARA MECNICA ANALTICA
a integral de volume Hdxdydz
a qual fornece uma trs-formas
Hdxdydz.
Existem maneiras muito formais e exatas para se definir formas exteriores,entretanto esta abordagem suficiente para os propsitos aqui destinados. Asexpresses anteriores so exemlos de formas diferenciais definidas no espaoEuclidiano E R3.Se trabalharmos em um espao n d(n-dimensional), as quantidades
dentro do sinal de uma integral em r d (integrao em uma variedade r-dimensional) ser uma rforma em ndimenses, portanto com nvariveis.Na expresso anterior da duas formas nota-se a ausncia de termos em
dzdy, dxdz, dydx, o que sugere simetria ou antissimetria. Adicionalmente aausncia de termos da forma dxdx, fortemente sugere antissimetria. necessrio que o clculo com formas exteriores possua propriedades
consistentes, uma dessas a regra de mudana de varivel em uma integralmltipla. As integrais sero sempre orientadas e por isso no se toma o valorabsoluto do Jacobiano.Considere
A(x, y)dxdy
na qual efetua-se as transformaes{
x = x(u, v),
y = y(u, v).
Tm-se que
A(x, y)dxdy =
A [x(u, v), y(u, v)]
(x, y)
(u, v)dudv,
a qual conduz igualdade
dxdy =(x, y)
(u, v)dudv =
xu
xv
yu
yv
dudv.
Fazendo x = y, o determinante ficar com linhas iguais e consequentementeser nulo. Tambm pela troca de x e y o determinante muda de sinal.Isto motiva a adoo da seguinte regra
-
1.1. FORMAS DIFERENCIAIS 11
{dxdx = 0,
dxdy = dydx
para a multiplicao de diferenciais no contexto de formas diferenciais.
1.1.2 O Espao dos p-Vetores
Notao:
R Corpo dos nmeros reais
L n dimensional espao vetorial em R.
Para cada p = 0, 1, n constri-se um novo espao vetorial
pL,
sobre L chamado de espao dos p vetores sobre L.Iniciamos com
0L = R, 1L = L,
anteriormente definidos.Na sequncia considera-se 2L em alguns detalhes. Este espao consiste
de todas as somas ai (i i)
sujeitas somente s regras
(a11 + a22) a1(1 ) a2(2 ) = 0,
(a11 + a22) a1( 1) a2( 2) = 0,
+ = 0.
(1.1.1)
Onde , , , etc, so vetores in L e a, b, etc so nmeros reais em R; denominado de produto exterior dos vetores and . Se e aredependentes, ou seja = a, ento
= a = a = a 0 = 0,
utilizando as regras (1.1.1); note que da terceira das equaes (1.1.1) temos + = 0, para = a segue que 2a( ) = 0 = = 0.Suponha que
1, 2, , n
-
12 CAPTULO 1. PRLOGO PARA MECNICA ANALTICA
seja uma base do espao vetorial L. ento
=
aii, =
bj
j
=
i,j
aibji j =
1
2
i,j
(aibj ajbi)(i j
),
com
i j =
{0, i = j;
j i, i 6= j.
Um exemplo tpico de um elemento do espao vetorial 2L uma combinaolinear a linear desses produtos exteriores e consequentemente um 2-vetor ou2formas
i j, 1 i, j n,
uma base de 2L. Conclui-se ento que
dim2L =n(n 1)
2=
(n2
)
. (1.1.2)
Estendendo este procedimento a pformas definidas no espao pL (2 p n), pela mesma ideia anterior, esto consistiro de todas somas formais(pvetores )
a (1 2 p)
sujeitas a regra de reduo generalizada (1.1.1) em pdimenses.Se
1, 2, , n
uma base do espao L, ento uma base de pL construda da seguinteforma: para cada conjunto de ndice
H = {h1, h2, hp} , , 1 5 h1 < h2 < < hp 5 n,
fixeH = h1 h2 hp .
A totalidade dos H uma base de pL, e
dim pL =
(np
)
,
o nmero de subconjuntos com p elementos diferentes de um conjunto den elementos diferentes. Considere o exemplo.
-
1.1. FORMAS DIFERENCIAIS 13
Exemplo 1.1.1. Fixe n = 3 e p = 2. Uma base de L pode ser
1, 2, 3
e uma base de 2L pode ser construda da forma: construa o conjunto Bcom 3!/2!(3 2)! elementos distintos
i j , i 6= j, com i, j = 1, 2, 3
de forma que
B ={1 2, 1 3, 2 3
}
uma base 2L. Um elemento caracterstico deste espao vetorial
=
H
aHH = a12
1 2 + a131 3 + a23
2 3
em particulardimnL = 1.
Uma linguagem outra notao, mais apropriada
p(M )
utilizada para representar o espao de pformas definida sobre uma variedadeM de dimenso n.Alguns exemplos de produtos exterior de formas.
Exemplo 1.1.2. Seja A = Aidxi e B = Bjdxj duas 1-formas. Os seusprodutos exteriores fornecem
A B = AiBjdxi dxj
=1
2AiBjdx
i dxj +1
2AiBjdx
i dxj
=1
2AiBjdx
i dxj +1
2AjBidx
j dxi
=1
2(AiBj AjBi) dx
i dxj ,
que uma 2formas.
-
14 CAPTULO 1. PRLOGO PARA MECNICA ANALTICA
R2 Forms Dim Base
0-forms f(x1, x2) 1 {0}1-forms fdx1, gdx2 2 {dx1, dx2}2-forms ffdx1 dx2 1 {dx1 dx2}
Tabela 1.1.1: Dimenses do espao p(R2)
R3 Forms Dim Base
0-form f(x1, x2, x3) 1 {0}1-form fdx1, gdx2, hdx3 3 {dx1, dx2, dx3}2-forms fdx1 dx2, gdx2 dx3, hdx3 dx1 3 {dx1 dx2, dx2 dx3, dx3 dx1}3-forms fdx1 dx2 dx3 1 {dx1 dx2 dx3}
Tabela 1.1.2: Dimenses do espao p(E )
Exemplo 1.1.3. Seja = x2dx y2dy e = dx + dy 2xydz, ento
=(x2dx y2dy
) (dx + dy 2xydz)
= x2dx dx + x2dx dy x2dx 2xydz
y2dy dx y2dy dy + y2dy 2xydz
= 0 +(x2 + y2
)dx dy + 2x3ydz dx + 0 2xy3dy dz
=(x2 + y2
)dx dy + 2x3ydz dx + 2xy3dy dz.
O qual tambm uma 2formas.
Exemplo 1.1.4. Seja x = r cos e y = r sin , portanto
dx dy = (dr cos r sin d) (dr sin + r cos d)
= r cos2 dr d r sin2 d dr
=(sin2 + cos2
)rdr d
= rdr d,
que o elemento diferencial de superfcie em coordenadas polares.
Exemplo 1.1.5. Considere o espao Euclidiano 2 d, M=E . Neste espaopode-se definir 0forma, 1forma, 2formas. Explicitamente
Exemplo 1.1.6. Considere o espao Euclidiano 3 d, M=E . Neste espaopode-se definir 0forma, 1forma, 2formas e 3formas. Explicitamente
-
1.1. FORMAS DIFERENCIAIS 15
1.1.3 Derivada Exterior
Nesta subseo introduz-se um operador diferencial o qual generaliza o opera-dores: gradiente, divergente e rotacional. Uma Uma outra notao utilizadapara representar o espao das mformas, ou seja
mL mp (M ) ,
representando o espao das m- formas no ponto p da variedade diferenciveln d, M .Representando por m(p)(M
n) o espao das mformas em p M . Esteespao vetorial tem dimenses
dim m(p)(Rn) =
{n!
m!(nm)! if m n,
0 if m > n.
Identifica-se 0(p)(M ) como o espao das funes de classe C em p M .
A unio de todos os m(p)(M ) com p assumindo valores atravs de todos ospontos da variedade M gera o que os matemticos denominam de fibrados ouainda fibrados tangente de mformas que ser representado como m(M ).Uma seo do fibrado m(M )
m(M ) = pmp (M )
denominada de is m-forma, podendo ser escrita como
= Ai1, ,im(x)dxi1 dxim .
Definio 1.1.7. Seja uma mforma como anteriormente definida . Aderivada exterior de uma (m + 1)forma d dada por
d = dAi1, ,im(x)dxi1 dxim
=Ai1, ,im(x)
xi0dxi0 dxi1 dxim .
(1.1.3)
No caso particular em que uma 0forma, isto uma funo, tem-seque
df =f
xidxi.
Proposio 1.1.8.
a) d : m m+1
-
16 CAPTULO 1. PRLOGO PARA MECNICA ANALTICA
b) d2 = d d = 0
c) d( ) = d + (1)p d, p e q
Demonstrao. a) imediatab) Considere a equao
d =Ai1, ,im(x)
xi0dxi0 dxi1 dxim ,
que novamente derivada fornece
d(d) =A2i1, ,im(x)
xjxi0dxj dxi0 dxi1 dxim
=1
2
A2i1, ,im(x)
xjxi0dxj dxi0 dxi1 dxim
+1
2
A2i1, ,im(x)
xi0xjdxx0 dxj dxi1 dxim
=1
2
(A2i1, ,im(x)
xjxi0
A2i1, ,im(x)
xi0xj
)
dxj dxi0 dxi1 dxim
= 0,
por que as derivadas parciais comutam.c)Por definio
= Ai1ipBj1jq(dxi1 dxip
)(dxj1 dxjq
).
Calculando a derivada exterior desta expresso obtm-se que
d( ) =
(Ai1, ,ip(x)
xi0dxi0Bj1jq + Ai1ip
Bj1, ,jq(x)
xj0dxj0
)
(dxi1 dxip
)(dxj1 dxjq
)
=Ai1, ,ip(x)
xi0dxi0 dxi1 dxip Bj1jq
(dxj1 dxjq
)
+Ai1ip(dxi1 dxip
)()p
Bj1, ,jq(x)
xj0dxj0
(dxj1 dxjq
)
= (d) + ()p d.
O fator ()p aparece devido ao nmero de permutaes entre d e p 1formas do tipo dxi.
-
1.1. FORMAS DIFERENCIAIS 17
Exemplo 1.1.9. Seja = P (x, y)dx + Q(x, y)dy. Ento,
d =P (x, y)
xidxi dx +
Q(x, y)
xidxi dy
=P (x, y)
ydy dx +
Q(x, y)
xdx dy
=
[Q(x, y)
x
P (x, y)
y
]
dx dy.
Considere o exemplo interessante que est relacionado ao teorema deGreen em R2.
Exemplo 1.1.10. Seja = M(x, y)dx + N(x, y)dy, e considere a possibi-lidade que d = 0. Pelo exemplo anterior
d =
[N(x, y)
x
M(x, y)
y
]
dx dy.
A condio d = 0 ser satisfeita se
N(x, y)
x
M(x, y)
y= 0
ou seN(x, y)
x=
M(x, y)
y.
Esta equao pode ser integrada fornecendo:
N(x, y)
xdx =
M(x, y)
ydx =
N(x, y) =
y
M(x, y)dx
=f
y;
f
M(x, y)dx
Utilizando esta equao, obtm-se que
N(x, y)
x=
2f
xy
=M(x, y)
y=
M(x, y) =f
x,
-
18 CAPTULO 1. PRLOGO PARA MECNICA ANALTICA
que substituda de volta na expresso de d fornece
d =
(2f
xy
2f
yx
)
dx dy
= d
(f
xdx +
f
ydy
)
= d(df).
O resultado final = df, d = 0
ou, em outras palavras uma diferencial exata.
Definio 1.1.11. Uma forma diferencial denominada fechada se satisfaz
d = 0 . (1.1.4)
Uma forma diferencial denominada exata se existir um forma diferen-cial tal que
= d .
Dado que d d = 0 imediato que uma forma exata fechada. O inversonem sempre verdadeiro. Para que uma forma fechada seja exata necessrioque a variedade em que ela est definida seja contratvel. Somente a ttuloinformativo:
Lema 1.1.12. Lema de Poincar: em uma espao contratvel (tal como Rn),se uma diferencial fechada, ento ela ser exata.
Exemplo 1.1.13. Considere que uma dada 1forma diferencial no sejaexata, mas que pode ser transformada em uma forma exata se existir umafuno no nula que multiplicando a torne exata, ou seja, considere que
= M(x, y)dx + N(x, y)dy, (1.1.5)
no exata, ou seja d 6= 0, porm | = e que d = 0. Esta equaoimpes a condio
d = d [M(x, y)dx + N(x, y)dy]
= (x, y),
em um espao 2 d , condio est facilmente generalizada para qualquerdimenso. Efetuando a derivada exterior, a equao anterior se escreve
d = d [M(x, y)dx]+d [N(x, y)dy] =
y[M(x, y)] dydx+
x[M(x, y)] dxdy,
-
1.1. FORMAS DIFERENCIAIS 19
que pode ser ainda reescrita como
d = [yM(x, y) My(x, y) + xN(x, y) + Nx(x, y)] dx dy
= {xN(x, y) yM(x, y) + [Nx(x, y) My(x, y)]} dx dy
= 0,
uma vez que estamos admitindo a existncia da funo (x, y) conhecidacomo fator integrante. A condio d = 0 fornece uma equao diferencialparcial de primeira ordem, suja soluo o fator integrante :
xN(x, y) yM(x, y) = [Nx(x, y) My(x, y)] . (1.1.6)
1.1.4 Simplicies Euclideanos e o Teorema de Stokes
Informalmente, "simplicies" so elementos fundamentais de uma dada tri-angulao de variedades, ou seja tendo-se uma variedade genrica pode-sedesenhar diversos tringulos, segundo determinadas regras que no seroaqui discutidas, de forma a cobrir toda variedade. Ao conjunto de todas asdiferentes forma de se desenhar tringulos para cobrir essa variedade "arbi-trria" d-se o nome de complexo de simpliciais. Para uma introduo sobreo assunto vejam o site Introduo a Topologia. com objetivo de informar,mas pecando pela completeza ilustra-se algumas definies e conceitos.
Definio 1.1.14. Simplicial o nome dado aos blocos fundamentais for-madores de simpliciais.
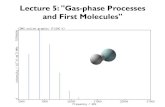
Os exemplos seguintes so mais esclarecedores:
0-simplicial um vrtice.
1-simplicial um seguimento de reta fechado.
2-simplicial um triangulo orientado.
3-simplicial um tetraedro orientado.
As figuras seguintes so esclarecedoras
Definio 1.1.15. Um simplexo s construdo com "uma soma" de vriossimpliciais, ou seja pontos, tringulos, tetraedros, polgonos, etc.
Definio 1.1.16. O bordo s de um simplexo s uma soma formal comcoeficientes inteiros de simpliciais com uma dimenso inferior,
(P0, , ) Pn =n
=0
(1) (P0, P1, P1, Pi+1, , Pn) .
-
20 CAPTULO 1. PRLOGO PARA MECNICA ANALTICA
Figura 1.1.1: Exemplos de Simplexos
Exemplo 1.1.17. O bordo de 1-simples
(P0, P1) = P0 P1,
enquanto que os bordos de um 2-simplexo e 3-simplexo so, respectivamente
(P0, P1, P2) = (P1, P2) (P0, P2) + (P0, P1),
(P0, P1, P2, P3) = (P1, P2, P3) (P0, P2, P3) + (P0, P1, P3) (P0, P1, P2)
Uma outra quantidade necessria para a triangulao de espaos, esta quan-tidade denominada de cadeia de simplexos, sendo definida como:
Definio 1.1.18. Uma n-cadeia de complexo de simpliciais, c, de umavariedade M , a soma formal
c =
aini ,
com coeficientes constantes ai e nsimplexos ni .
Com a ajuda destes simplexos estabelece-se o teorema de Stokes.
-
1.1. FORMAS DIFERENCIAIS 21
Teorema 1.1.19. Seja uma pforma assumindo valores na variedade Me c uma (p + 1) cadeia. Neste contexto o Teorema de Stokes formuladocomo
c
=
c
d
Uma maneira prtica de se entender o que esta expresso significa comaplicaes e exemplos! Certamente os mais simples.
Exemplo 1.1.20. Considere que = idxi, i = 1, 2, 3 uma 1forma em3 d e que c uma cadeia de simplexos do crculo,
d =
(2x1
1x2
)
dx1dx2+
(3x1
1x3
)
dx3dx1+
(2x1
1x2
)
dx1dx2,
e quec rea do crculo = r2
c = 2r,
e portanto
2r
(1dx
1 + 2dx2 + 3dx
3)
=
r2
[(2x1
1x2
)
dx1 dx2
+
(3x1
1x3
)
dx3 dx1 +
(2x1
1x2
)
dx1 dx2]
,
que em uma linguagem vetorial pode ser escrita como
ds =
S
( ) ndS,
bastante familiar.
Exemplo 1.1.21. Considere que = ijdxi dxj , i = 1, 2, 3 e ij = ji uma 2forma em 3 d e que c uma cadeia de simplexos de uma esfera,segue que d =
(12x3
+ 23x1
+ 31x2
)dx1 dx2 dx3
c volume da esfera =4
3r3
c = 4r2
e portanto
4r2
(12dx
1 dx2 + 23dx2 dx3 + 31dx
3 dx1)
=
r2
(12x3
+23x1
+31x2
)
dx1 dx2 dx3,
-
22 CAPTULO 1. PRLOGO PARA MECNICA ANALTICA
que na notao vetorial
S
A ndS =
V
AdV
o conhecido teorema da divergncia, com Ai = ijkjk.
1.2 Coordenadas generalizadas
1.3 Espao de configuraes
A configurao instantnea de um sistema descrita pelos valores das ncoordenadas generalizadas qi , i = 1, n, e corresponde a um ponto particu-lar no hiperespao cartesiano onde os q formam os neixos de coordenadas.Este espao n d conhecido como espao de configuraes.Com o passar do tempo, o estado do sistema muda e o ponto representa-
tivo do sistema no espao de configuraes descreve uma curva denominadade caminho do movimento do sistema. O movimento do sistema como uti-lizado na frase anterior, refere-se ao movimento do ponto representativo dosistema ao longo da trajetria no espao de configurao. O tempo pode serconsiderado formalmente como um parmetro da curva; cada ponto sobre acurva pode estar associado a um ou mais tempo ( por exemplo no movimentoperidico em que a curva uma circunferncia). O espao de configuraono tm necessariamente conexo com espao fsico 3 d justamente comocoordenadas generalizadas no so necessariamente posio. A curva de mo-vimento no espao de configurao no tem semelhana com o caminho noespao do sistema fsico, ou partcula. Cada ponto no espao de configuraorepresenta uma configurao do sistema em um dado instante de tempo.Sendo mais objetivos, considere que Q representa o conjunto de todas as
configuraes possveis do sistema consistente com as condies de vnculos.O conjunto Q de fato uma variedade diferencivel. Seja q0 um ponto Q.Para clarificao conceitual e tambm para fazer uma correspondncia coma fsica , trabalha-se em um mapa local que contenha q0 e sua vizinhana, ouseja trabalha-se em Tq0(Q), no espao tangente variedade Q no ponto q0.Suponha que q0 represente uma configurao do sistema no tempo t0. Em
um tempo posterior t o sistema estar na posio q(t) determinada pelasequaes dinmicas (Equaes de movimento) e a quantidade
q(t) q(t0) = q(t) q0,
representar o deslocamento do sistema aps o tempo t t0.
-
1.3. ESPAO DE CONFIGURAES 23
Ao invs de olhar os pontos do espao de configuraes, considera-se umacurva nesse espao, a qual em s = s0 est no ponto q0,
(s0) = q0
e calcula-se o deslocamento,
(s) (s0) = (s) q0, (1.3.1)
que deve resultar se o movimento no espao de configuraes se der ao longoda curva (s), . que no a trajetria fsica do sistema. Denomina-se odeslocamento dado pela Eq.(1.3.1) de deslocamento virtual, ao longo da curva aps um intervalo s s0. Este deslocamento denominado de virtual porser o deslocamento que ocorre no espao de configurao ao longo da curva de nossa escolha ou seja uma curva virtual no espao de configuraes, nosentido de no ser a curva da trajetria do sistema no espao fsico.
1.3.1 Deslocamento virtual
Na fsica, infinitesimal, significa essencialmente primeira aproximao numaexpanso em termos de um dado parmetro caracterstico do sistema sobconsiderao.Deslocamento virtual a distncia infinitesimal entre dois pontos vizinhos
no espao de configuraes do sistema.No espao de configuraes elege-se naturalmente o parmetro s o qual
permite que se messa distncias infinitesimais ao longo de uma dada curva nesse espao. Portanto quando se discute um deslocamento infinitesimal, oque se tem em mente considerar o comportamento da curva (s) na vizi-nhana do ponto s0 ou seja calcular o valor de (s+ s0) quando o parmetros B(s0), ou seja quando s pertence a vizinhana de s0. Isto pode ser feito,para distncias infinitesimais, com a expanso em sries de Tailor
(s) = (s0) +d(s)
ds
ss0
(s s0) + O[(s s0)
2] ,
portanto
(s) q0 =d(s)
ds
ss0
(s s0) + O[(s s0)
2] ,
donde se v que a intensidade do deslocamento determinada pelo coeficientede s s0 ou seja pela velocidade d(s)ds, da curva em s0. Es outra palavrasdeslocamento virtuais infinitesimais so determinados pelo vetor velocidadeda curva selecionada nos espao de configuraes. Sabe-se de geometria dassuperfcies que vetores velocidades de uma curva so tangentes curva epertencem ao espao tangente curva no ponto onde se calcula a derivada.
-
24 CAPTULO 1. PRLOGO PARA MECNICA ANALTICA
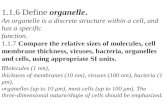
Exemplo 1.3.1. O pndulo simples.
x(t)
y(t)
(t) l
m
As coordenadas cartesianas do bulbo esto relacionadas com a varivel an-gular da forma
x(t) = lsen((t)),
y(t) = l cos((t)).(1.3.2)
no so independente, uma vz que satisfazem a condio de vnculo hol-nomo
x2 + y2 = l2. (1.3.3)A soluo da equao de movimento, 2 lei de Newton, para o pndulo
simples
+g
l = 0,
temo como soluo(t) = 0 cos(t),
portanto assumindo valores
(t) [0, 0], (1.3.4)
sendo 0 a amplitude angular de oscilao. A Eq.(1.3.4) um segmento dereta representando o espao de configurao deste sistema enquanto que ografo da curva, Eq. (1.3.5), parametrizada com t,
(t) = (lsen((t)), l cos ((t))) , (1.3.5)
representa o a trajetria fsica do bulbo no espao Euclidiano, esquematizadana figura Fig. (1.3.1)
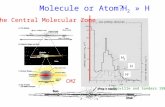
Exemplo 1.3.2. O pndulo esfrico
-
1.3. ESPAO DE CONFIGURAES 25
Figura 1.3.1: Trajetria fsica do pndulo simples
Figura 1.3.2: Trajetria fsica do pndulo esfrico
-
26 CAPTULO 1. PRLOGO PARA MECNICA ANALTICA
Nesta figura est esquematizada a trajetria fsica descrita pelo bulbodo pndulo esfrico, para uma dada condio inicial. a figura o grficoparamtrico da curva em 3 d
(t) = (r0sen ((t)) cos((t)), r0sen ((t)) sen((t)), r0 cos ((t))) ,
onde e so solues da equao de movimento para o pndulo esfrico
= 2sen cos g
lsen,
= 2 cot ,
que no possuem soluo analtica. O espao de configurao o espaocartesiano 2 d cujos eixos coordenados so as variveis e . Uma repre-sentao esquemtica do espao fsico, de configurao e de fase, do pnduloesfrico e apresentada na figura a seguir.
Exemplo 1.3.3. Considere um pndulo esfrico que num dado tempo t0,partindo da longitude 0,descreve uma trajetria circular ao longo do equadorno espao espao fsico e que aps um tempo t1 retorna a longitude 0 mas nona linha do equador. Considere que na sequncia ou seja t > t1 a trajetria circular, mas faz um certo angulo com o equador e que aps um intervalode tempo 2t1 o pndulo retorna a longitude 0. O tempo que separa esses doispontos ao longo da trajetria do movimento 2t1.Considere a projeo dessa trajetria fsica no espao de configuraes,
digamos plano xy. Nesse espao os pontos representativos do sistema esta-ro sob uma curva circular e outra elptica concntricas e contnuas. Nesseespao a distncia entre o ponto inicial s0 correspondente t0 e o ponto scorrespondente a 2t1 infinitesimal. FIGURA.
-
Captulo 2
Tpicos Selecionados de ClculoVariacional e Equaes deLagrange
Posicionamento do problema
Por simplicidade e a ttulo de compreenso consideramos inicialmente o pro-blema unidimensional. O problema bsico do clculo da variaes determi-nar a funo y(x) tal que a integral
J =
x2
x1
f [y(x), y(x); x] dx (2.0.1)
seja um estremo ou estacionria. J denominado de funcional que umafuno real cujo domnio o espao das funes. Na Eq. (2.0.1)
y(x) =dy(x)
dx,
o ponto e vrgula destaca a varivel independente x. O funcional J dependeda funo y e dos limites de integrao x1 e x2. Estes limites podem ser fixosou variveis, por enquanto vamos consider-los fixos. A ideia testar vriasfunes no integrando at que uma dada funo fornece um valor estacion-rio para o funcional J. Como em fsica quase tudo feito na aproximaolinear consideraremos pequenas variaes ou mudanas na funo y(x) paraestudarmos como o valor do funcional J afetado.Note que o funcional J um nmero, ou seja para funes reais J R,
portanto para diferentes funes y ,J U R. Um dos pontos do conjuntoU correspondero ao valor estacionrio de J.
27
-
28CAPTULO 2. TPICOS SELECIONADOS DE CLCULO VARIACIONAL E EQUAES DE LAGRANGE
Figura 2.0.1: Trajetrias Modificadas
Dado que a tarefa de se encontrar diferentes funes para encontrar qualatribui um valor estacionrio ao funcional J no nada trivial, utiliza-seo seguinte procedimento muito prtico: ao invs de se propor diferentes yconsidere que y a funo soluo de nosso problema e que est funo aque fornece um valor estacionrio ao J. Neste cado o que precisamos mostrar que qualquer modificao na funo y acarretar em um aumento no valorde J, e dado que estamos interessados em pequenas variaes introduzimosum parmetro que controlar ma deformao y na funo y ou seja oparmetro possibilita que modifiquemos a funo y pela introduo de umafuno arbitrria (x), sem a necessidade de se ficar via tentativa modificandoexplicitamente y pela adio ou introduo de novas funes.Enfim, a funo modificada
y = y(x, ) = y(x, 0) + (x), (2.0.2)
a qual via variao do parmetro fornece uma infinidade de funes mo-dificadas na vizinhana da funo y(x). Impe-se que as trajetrias variadascoincidam com a original nos extremos de integrao, ou seja
(x1) = (x2) = 0. (2.0.3)
Neste contexto o funcional J ser uma funo do parmetro
J() =
x2
x1
f [y(x, ), y(x, ); x] dx. (2.0.4)
-
29
Figura 2.0.2: Trajetria deformada ou variada
Como o objetivo encontrar valores estacionrios para o funcional J , pode-mos expandir a expresso anterior em srie de Taylo e considerar a contri-buio de termos lineares:
x2
x1
f [y(x, ), y(x, ); x] dx =
x2
x1
f [y(x), y(x); x] dx + J + O(2),
sendo que na aproximao linear
J
=0
=
x2
x1
f [y(x, ), y(x, ); x] dx x2
x1
f [y(x), y(x); x] dx = 0,
(2.0.5) estacionrio ou extremo.
Exemplo 2.0.1. Considere a funo f = (dy/dx)2, onde y(x) = x,uma reta.Para construir trajetrias vizinhas reta adicionamos a funo (x) = senx.A proposta calcular o funcional J() entre os limites x1 = 0 e x2 = 2,para isto construmos as trajetrias ou curvas variadas, veja a Fig. (2.0.2)
y(x, ) = y(x) + (x)
= x + senx.
-
30CAPTULO 2. TPICOS SELECIONADOS DE CLCULO VARIACIONAL E EQUAES DE LAGRANGE
Note que a curva variada coincide com a curva original nos extremos deintegrao
y(0, ) = 0 + sen0 = 0,
y(2, ) = 2 + sen2 = 2.
A funo modificada f(x, )
f = [1 + cos x]2 ,
enquanto que o funcional J
J() =
2
0
[1 + cos x]2 dx
=
2
0
[1 + 2 cos x + 2 cos2 x
]dx
= 2 + 2.
Segue desta equao que o valor estacionrio de J
J
=0
= 2 = 0 = = 0.
Como esperado, j que J() sempre maior que J(0) para positivo ounegativo.
2.1 As Equaes de Euler
Para obter as famosas equaes de Euler, pode-se considerar a expanso emsrie de Taylor da Eq. (2.0.5) ou equivalentemente derivar o funcional comrelao ao parmetro e impor a condio de extremo, ou seja
J
=
x2
x1
[f
yy
+
f
y
y
]
dx.
Considerando quedy(x, )
d= (x), (2.1.1)
d
d
dy(x, )
dx=
d
d[y(x) + (x)]
= (x).
-
2.1. AS EQUAES DE EULER 31
Note que segue desta duas equaes que
d
d
dy(x, )
dx=
d
dx
dy(x, )
d= (x). (2.1.2)
ou seja as derivadas comutam. Substituindo as Eq. (2.1.1,2.1.2) na expressoda derivada do funcional, obtm-se que
J
=
x2
x1
[f
y(x) +
f
y(x)
]
dx.
Uma integrao por partes possibilita escrever o primeiro termo em funode e coloc-lo em evidncia:
x2
x1
f
y(x)dx =
*0
f
y(x)
x2
x1
x2
x1
[d
dx
(f
y
)]
(x)dx,
tendo em conta a Eq. (2.0.3). A variao de J fica
J
=
x2
x1
[
d
dx
(f
y
)
+f
y
]
(x)dx.
A condio que o funcional seja estacionrio, Eq. (2.0.5) impe
J
= 0 =
x2
x1
[
d
dx
(f
y
)
+f
y
]
(x)dx
= x2
x1
[
d
dx
(f
y
)
+f
y
]
(x)dx = 0.
Utilizando o Lema Fundamental do Clculo das Variaes:
Lema 2.1.1. SeM(x), x1 x x2 uma funo contnua tal que x2
x1M(x)(x)dx =
0, qualquer que seja a funo contnua (x), com (x1) = (x2) = 0, entoM(x) 0 em [x1, x2].
Para uma demonstrao deste Lema veja a Ref. ([6]). Utilizando estelema na variao do funcional, obtm-se que
d
dx
(f
y
)
f
y= 0 . (2.1.3)
Esta equao denominada de Equao de Euler. A sua soluo fornece afuno ye consequentemente a funo f que fornece ao funcional J um valorestacionrio.
-
32CAPTULO 2. TPICOS SELECIONADOS DE CLCULO VARIACIONAL E EQUAES DE LAGRANGE
2.1.1 Notao Variacional
Para definirmos com clareza a notao variacional, considere a expanso emsrie de Taylor das trajetrias variadas
y(x, ) = y(x, 0) + (x) + O(2),
que em primeira aproximao e tendo em conta a forma funcional de y(x, )pode ser reescrita como
y(x, ) = y(x, 0) +dy(x, )
d
=0
+1
2!
d2y(x, )
d2
=0
2 + ,
entretanto
y(x, ) y(x, 0) y = (x),
tambmdy(x, )
d= (x).
Comparando as equaes
y = (x)dy(x, )
d= (x)
}
= y =dy(x, )
d. (2.1.4)
Esta notao pode ser estendida as outras variaes
J x2
x1
f [y(x, ), y(x, ); x] dx,
com
d
d. (2.1.5)
Existe um nmero muito grande de exemplos de aplicaes da equaes deEuler para se encontrar a funo y que extremiza um dado funcional, algunsso problemas famosos como o da braquistcrona que consiste em encontrara curva que fornece o menor tempo de percurso de uma partcula em quedalivre que desliza sem atrito. Certamente que a reta vertical a soluo, en-tretanto a ideia do problema encontrar a curva soluo tal que o ponto finalno est sobre a reta vertical em que se encontra o ponto inicial. Discussesdetalhadas desse e outros problemas podem ser encontradas em diversos li-vros textos, em particular nas referncias Ref.([6],[3]). Iremos aqui selecionaroutros exemplos.
-
2.1. AS EQUAES DE EULER 33
Exemplo 2.1.2. A distncia mais curta entre dois pontos no plano xy. Oelemento de comprimento de arco no plano
ds2 = dx2 + dy2.
Considerando y = y(x) escrevemos
ds =
1 +
(dy
dx
)2dx,
de conde o comprimento total da curva calculado integrando-se esta ex-presso
I =
x2
x1
ds =
x2
x1
1 +
(dy
dx
)2dx.
A ideia considerar o comprimento da curva como um funcional e o inte-grando
1 +
(dy
dx
)2
a funo f [y, y, x]a qual queremos determinar de forma que I seja estacio-nria. Como vimos, o caminho resolvermos a equao de Euler, Eq. (2.1.3),com
f =
1 +
(dy
dx
)2=
1 + y2.
Temos portanto qued
dx
(f
y
)
f
y= 0.
Claramentef
y= 0,
portantod
dx
(f
y
)
= 0 =f
y= c,
onde c uma constante. Derivando a funo f encontra-se que
1
2
2y
1 + y2= c =
y
1 + y2= c
= y2(1 c2
)= c2,
-
34CAPTULO 2. TPICOS SELECIONADOS DE CLCULO VARIACIONAL E EQUAES DE LAGRANGE
que pode ser integrada imediatamente, fornecendo
y(x) =c
1 c2
x + b = ax + b.
Na expresso anterior definiu-se
a c
1 c2
.
Note que a soluo, muito conhecida de todos, a equao de uma reta!Questo interessante: o que significa ou faz sentido a escolha para o valor daconstante c = 1?Note que a funo f dado por
f =
1 + y2 =
1 + a2,
que uma constante. Isto estranho ou no?
Exemplo 2.1.3. Geodsicas Ref. ([2],[1]). Geodsica o nome dado a curvaque fornece a distncia mais curta entre dois pontos em uma dada superfcieRiemanniana ou pseudo Riemanniana. O elemento de comprimento de arcoem uma superfcie Riemanniana funo da mtrica Riemanniana
ds2 = gijdxidxj , i, j = 1, , n,
onde n a dimenso do espao em considerao. As funes gij so chamadasde elementos da matriz mtrica ou tambm tensor mtrico. Esta matriz simtrica 1
gij(x) = gji.(x).
Escolhendo um parmetro qualquer, por exemplo , pode-se escrever xi =xi() e portanto
ds2 = gij(x)dxi
d
dxj
ddd. (2.1.6)
Como no exemplo de uma curva no plano, o comprimento de uma curva emum superfcie de Rieman
I =
2
1
ds =
2
1
gij(x)dxi
d
dxj
dd
2
1
gij(x)xixjd.
1De fato no necessrio impor que o tensor mtrico seja simtrico, j que a contri-buio antissimtrica anulado no produto com dxidxj
-
2.1. AS EQUAES DE EULER 35
O procedimento o mesmo que o utilizado na obteno da equao da reta,sendo que agora a funo f
f =
gij(x)xixj,
a qual deve ser utilizada na equao de Euler para determinarmos a soluoxi() :
d
d
(f
xk
)
f
xk= 0.
Diferentemente da reta no espao Euclidiano 2 d, nesta equao f/xi 6=0,o que dificulta mas no inviabiliza o clculo da EDP para a geodsica.Calculando
f/xk =1
2
1
gij(x)xixj
[gpq(x)
xk
]
xpxq,
f
xk=
1
2
gpq(x)gij(x)xixj
[pkxq + qkx
p]
=gkq(x)x
q
gij(x)xixj
.
O clculo da derivada com relao ao parmetro fornece
d
d
(f
xk
)
= 1
2
gkq(x)xq
(gij(x)xixj)3/2
[glm(x)
xnxnxlxm + glm(x)
[xlxm + xlxm
]]
+1
gij(x)xixj
{gpq(x)
xkxkxq + gkq(x)x
q
}
Este clculo ingrato! Para contornarmos esta dificuldade faremos o se-guinte: uma escolha apropriada do parmetro da curva. Vamos admitir que o parmetro natural, ou seja d = ds, que em se tratando do espao deMinkowiski pode ser o tempo prprio d no referencial prprio. Com estaescolha teremos
ds2 = gij(x)dxi
ds
dxj
dsdsds = gij(x)
dxi
ds
dxj
ds= 1.
Com esta escolha, que alm de conveniente para os clculos apropriada nocontexto fsico, as equaes anteriores se reduzem
f/xk =1
2
1
gij(x)xixj
[gpq(x)
xk
]
xpxq 1
2
[gpq(x)
xk
]
xpxq,
f
xk=
gkq(x)xq
gij(x)xixj
gkq(x)xq,
-
36CAPTULO 2. TPICOS SELECIONADOS DE CLCULO VARIACIONAL E EQUAES DE LAGRANGE
enquanto qued
d
(f
xk
)
=gkq(x)
xlxlxq + gkq(x)x
q,
e portanto as equaes de Euler fornecem
gkq(x)
xlxlxq + gkq(x)x
q 1
2
[gpq(x)
xk
]
xpxq = 0. (2.1.7)
Utilizando o tensor mtrico para baixar o ndice do tensor contravariante
gkq(x)xq = xk,
e tendo em conta que
gkq(x)
xlxlxq =
1
2
gkq(x)
xlxlxq +
1
2
gkq(x)
xlxlxq
=1
2
gkq(x)
xlxlxq +
1
2
gkl(x)
xqxqxl
=1
2
(gkqxl
+gklxq
)
xlxq. (2.1.8)
Substituindo a Eq. (2.1.8) na Eq. (2.1.7), obtm-se que
gkqxq +
1
2
(gkqxl
+gklxq
glq(x)
xk
)
xlxq = 0.
Utilizando a propriedadegkmglm =
kl, (2.1.9)
j que gkm so os elementos da matriz mtrica inversa, multiplicamos toda aequao por gki obtendo
xi +1
2gik(
gkqxl
+gklxq
glq(x)
xk
)
xlxq = 0.
Introduzimos uma notao mais compacta
d2xi
ds2+ ilq
dxl
ds
dxq
dx= 0. (2.1.10)
Esta a famosa equao de uma curva especial chamada de geodsica. Estequao vlida para qualquer superfcie Riemanniana; para resolv-la bastaconhecer a mtrica. Nem sempre esta a forma ou o caminho mais fcil de seencontrar a geodsica em uma dada superfcie. Nesta equao ao simbolo ilq denominado de conexo afim ou smbolos de Christoffel. Uma propriedadeimportante que, neste caso, os smbolos so simtricos nos ndices inferiores
ijk = ikj .
-
2.1. AS EQUAES DE EULER 37
Exemplo 2.1.4. O clculo da geodsica na esfera utilizando a Eq.(2.1.10) eas Eqs. de Euler, Eq. (2.1.3).Certamente nossa escolha de coordenadas a clssica, ou seja (x1, x2, ) =
(, ). A mtrica na superfcie da esfera
ds2 = r2d2 + r2sen2d2,
de onde pode-se ler a matriz mtrica
(gij) =
(r2 00 r2sen2
)
.
As conexes no nulas so
= cos sen,
= cot .
A equaes para a geodsica so:Componente x1 = :
d2
ds2+
(d
ds
)2= 0 =
d2
ds2 cos sen
(d
ds
)2= 0.
Componente x2 = :
d2
ds2+
d
ds
d
ds+
d
ds
d
ds= 0 =
d2(s)
ds2+ 2 cot
d
ds
d
ds= 0.
necessrio resolver estas duas equaes:
d2
ds2 cos sen
(d
ds
)2= 0, (2.1.11)
d2(s)
ds2+ 2 cot
d
ds
d
ds= 0, (2.1.12)
com a condio auxiliar
r2(
d
ds
)2+ r2sen2
(d
ds
)2= 1. (2.1.13)
Neste caso, este no o melhor caminho para se calcular a geodsica emuma superfcie esfrica, mais simples identificar a funo f e utilizar asequaes de Euler.
-
38CAPTULO 2. TPICOS SELECIONADOS DE CLCULO VARIACIONAL E EQUAES DE LAGRANGE
2.2 O Princpio de Hamilton e as Equaes deLagrange.
A extenso do funcional J para n dimenses imediata. Faremos esta exten-so para sistemas fsicos (observe que no necessariamente mecnicos), j quenosso interesse a formulao Lagrangiana de sistemas fsicos. Tudo muitosimples, o funcional J passa a ser chamado de ao S e a funo f recebe onome de Lagrangiana. Simplicidade a parte fazemos as correspondncias
J S
f [y, t; x] L (q, q, t) ,
enfim, estas correspondncias resultam da formulao do problema no espaode configuraes em termos de graus de liberdades ou coordenadas indepen-dentes, para isto faz-se a identificao das variveis y com as coordenadasgeneralizadas q, y com as velocidades generalizadas q e a varivel indepen-dente x com o tempo t.A ao integral dada por
S =
t1
t0
L(q, q, t), (2.2.1)
onde L(q, q, t) funo de Lagrange ou Lagrangiana dada por
L(q, q, t) = T V,
sendo T a energia cintica das partculas constituintes do sistema e V a ener-gia potencial. Esta identificao segue da definio de Lagrangiana quandoda deduo das equaes de Lagrange do princpio de DLembert. Podemosagora enunciar oPrincpio de Hamilton. Dado um sistema mecnico holnomo descrito
pela Lagrangiana L(q, q, t), seu movimento do instante t0 ao instante t1 talque a ao
S =
t1
t0
L(q, q, t)
estacionria para a trajetria real, mantidos fixos os extremos de integrao.A energia cintica em termos das coordenadas generalizadas dada por
T =1
2
i
miv2i ,
-
2.2. O PRINCPIO DE HAMILTON E AS EQUAES DE LAGRANGE.39
onde
vi =dridt
=
j
riqj
qj +rit
,
portanto
T =1
2
i
mi
[
jk
(riqj
)
(riqk
)
qj qk + 2
j
(riqj
)
rit
qj +rit
rit
]
,
eV = V (q).
A variao ou imposio que a ao seja estacionaria fornece as equaes deLagrange
d
dt
(L
qi
)
L
qi= 0, i = 1, , n. (2.2.2)
Vale observar que a Lagrangiana L tem dimenso de energia e a ao S temdimenso de momento angular, ou seja
[L] =ML2
T 2,
[S] =ML2
T.
Aplicaes das equaes de Lagrange so discutidas nas subsees e exemplosseguintes.
2.2.1 Lagrangiana e equaes de movimento de umapartcula livre.
Vamos obter a Lagrangiana de uma partcula livre em 3 d com relao aum referencial inercial [4],[5]. Com relao a um referencial inercial o espao homogneo e isotrpico, ou seja no h ponto preferencial para se escolhera origem do sistema de coordenadas e nem direo privilegiada, e de fato oespao e o tempo devem ser homogneos e o espao 3 d isotrpico. Sabe-se que em um sistema inercial, uma partcula em repouso permanecer emrepouso. Estas propriedades impe imediatamente condies na forma daLagrangiana de uma partcula livre. A homogeneidade do espao e do tempoimpe que a Lagrangiana no pode depender de r e nem de t, portantosomente da velocidade v da partcula. Veja que isto no impede a adio deuma constante funo Lagrangiana. J a isotropia do espao sinnimo deno direo privilegiada, portanto se a Lagrangiana depender da velocidade,
-
40CAPTULO 2. TPICOS SELECIONADOS DE CLCULO VARIACIONAL E EQUAES DE LAGRANGE
poder ser somente em mdulo, ou seja v. Dado que a Lagrangiana dadapor
L(q, q, t) = T V (q),
para a partcula livre fica claro que
L =1
2mv2.
apropriado escrevermos a velocidade em termos de coordenadas curvi-lineares, ou seja
ds = h1d1e1 + h2d2e2 + h3d3e3,
de onde segue que
v =ds
dt= h11e1 + h22e2 + h33e3,
sendo que a energia cintica ou Lagrangiana de uma partcula livre em coor-denadas curvilineares
L =1
2m
[(h11
)2+(h22
)2+(h33
)2]
, (2.2.3)
ondehi = hi (1, 2, 3) .
As equaes de Lagrange
d
dt
(L
qi
)
L
qi= 0,
com as coordenadas generalizadas qi = i, so
d
dt
(L
i
)
L
i= 0,
Calculando
L
i=
i
m
2
3
j=1
(hj j
)2
= m3
j=1
(hj j
)(hji
j
)
= m3
j=1
(hj
2j
) hji
-
2.2. O PRINCPIO DE HAMILTON E AS EQUAES DE LAGRANGE.41
e
L
i= m
3
j=1
(h2j j
)(
ji
)
= m3
j=1
(h2j j
) (ij)
= mh2i i.
Segue que as equaes de movimento de uma partcula livre em coordenadascurvilineares so
d
dt
(mh2i i
) m
3
j=1
(hj
2j
) hji
= 0.
Se calcularmos a derivada temporal dos coeficientes de Lam
d
dth2i = 2hi
dhidt
,
obteremos as equaes de movimento na forma
2hidhidt
didt
+ h2id2idt2
3
j=1
hj
(djdt
)2hji
= 0, i = 1, 2, 3. (2.2.4)
Note que no h soma nos ndices i.
Exemplo 2.2.1. Lagrangiana, equaes de movimento e ao para umapartcula livre em 3 d Cartesiano.Em coordenadas cartesianas
hi = 1, i = 1, 2, 3,(i)
= (x, y, z) ,
sendo que se obtm das Eq. (2.2.3, 2.2.4)
L =m
2
(x2 + y2 + z2
),
sendo as equaes de movimentos dadas por
d
dt(mx) = 0,
d
dt(my) = 0,
d
dt(mz) = 0,
-
42CAPTULO 2. TPICOS SELECIONADOS DE CLCULO VARIACIONAL E EQUAES DE LAGRANGE
que so exatamente as equaes para a conservao das componentes domomento p de uma partcula livre. Estas equaes podem ser escritas emuma forma compacta como
dpidt
= 0, i = 1, 2, 3,
ondepi = mxi.
Suponha seja necessrio calcularmos a ao de uma partcula livre, ou sejafazer explicitamente o clculo
S =
tf
ti
Ldt,
onde L a Lagrangiana de uma partcula livre, portanto torna-se necessriocalcular
S =
tf
ti
1
2m(x2 + y2 + z2
)dt,
que por simplicidade e sem perda de generalidade consideramos o clculounidimensional
S =
tf
ti
1
2mx2dt =
m
2
tf
ti
x2dt.
Dado que a partcula livre a sua equao de movimento tem como soluo
x(t) = xti + vxtit,
de onde sugue quedx
dt= vxti ,
que substituda na ao fornece
S =m
2v2xti (tf ti) .
A velocidade inicial vxti pode ser calculada em termo da posio e intervalode tempo transcorrido, utilizando a funo x(t) :
x(tt) x(ti) =:0xti xti + vxti (tf ti) =
vxti =x(tt) x(ti)
(tf ti).
Substituindo na expresso da ao obtemos
S =m
2
[x(tt) x(ti)]2
(tf ti).
-
2.2. O PRINCPIO DE HAMILTON E AS EQUAES DE LAGRANGE.43
Exemplo 2.2.2. A ao para um oscilador harmnico simples, cuja Lagran-giana dada por
L =m
2
(x2 2x2
),
S =
m
2sen (T )
[(x21 + x
22
)cos (T ) 2x1x2
],
onde T = t2 t1,e t1 e t2 so os tempos iniciais e finais nos extremos deintegrao da ao.
Exemplo 2.2.3. Lagrangiana de uma partcula relativstica livre - Geome-tria pseudo-Riemanniana plana - espao de Minkowski.A Lagrangiana de uma partcula no relativstica livre, ou seja
L =m
2
ds
dtds
dt,
a qual um invariante sob transformaes do Grupo de Galileu, ou seja umescalar de Galileu. Esta Lagrangiana depende do quadrado da velocidade,que por dua vez obtido do elemento de comprimento de arco. Vimos que oelemento de comprimento de arco em um espao Riemanniano dado por
ds2 = gijdxidxj , (2.2.5)
entretanto na expresso acima, nem tudo foi dito sobre as propriedades dotensor mtrico (gij). Como definido anteriormente a mtrica Eq. (2.2.5) positiva definida, ou seja a forma quadrtica gijdxidxj positiva definida,entretanto relaxando esta condio, portanto admitido que
gijdxidxj
< 0,
= 0,
> 0,
teremos uma mtrica pseudo-riemaniana.Um caso de particular interesse a mtrica de Minkowski, que decorre
de ser a velocidade da luz constante e igual a c em qualquer referencial. Aequao de uma frente de onda eletromagntica esfrica pode ser escrita como
x2 + y2 + z2 c2t2 = invariante.
Sem entrar em detalhes, segue desta expresso a definio do elemento decomprimento de arco no espao de Minkowski
ds2 = c2dt2 dx2 dy2 dz2, (2.2.6)
-
44CAPTULO 2. TPICOS SELECIONADOS DE CLCULO VARIACIONAL E EQUAES DE LAGRANGE
sendo
ds2
< 0, intervalo tipo espao,
= 0, intervalo tipo luz,
> 0, intervalo tipo tempo.
Suponha que decidimos por generalizar a expresso L = m2
dsdt ds
dtpara uma
variedade arbitrria, neste caso escreveramos
F =m
2gij
dxi
ddxj
d,
ou algo semelhante. Uma dificuldade surge, esperamos que esta grandezarepresente a energia de uma partcula livre, portanto necessrio que esco-lhamos o parmetro com significado fsico, neste caso o tempo prprio. Ok,podemos escolher o parmetro como sendo o parmetro natural da curva,ou seja, s j que no referencial prprio s = cd , sendo o tempo prprio.Isto bom mas leva a uma dificuldade; note que com esta escolha teremos
L =m
2gij
dxi
ds
dxj
ds=
m
2,
j queds2 = gijdx
idxj .
Um possvel caminho para se escrever uma Lagrangiana para uma partcularelativstica livre encontrar uma ao invariante de Lorentz (grupo de Lo-rentz), que fornea as equaes de movimento corretas e que no limite norelativstico fornea a energia cintica de uma partcula livre. Esta ao podeser da forma
S = t2
t1
ds, (2.2.7)
onde ds2 o comprimento de arco no espao de Minkowski,
ds2 = c2dt2 dx2 dy2 dz2,
de onde
ds =
1 (v
c
)2cdt,
onde
v =
(dx
dt,
dy
dt,
dz
dt
)
.
O limite no relativstico da ao Eq.(2.2.7) determina o valor da cons-tante
= mc2,
-
2.2. O PRINCPIO DE HAMILTON E AS EQUAES DE LAGRANGE.45
levando portanto a
S = mc2 t2
t1
1 (v
c
)2dt = mc
t2
t1
dxdx. (2.2.8)
As equaes de movimento, que seguem das Equaes de Euler, so
d
dt
mv1
(vc
)2
= 0.
Exemplo 2.2.4. O elemento de comprimento de arco ds2 uma quantidadeinvariante ou seja, esta grandeza a mesma em qualquer referencial. Departicular interesse a utilizao desta invarincia no contexto da Fsica,por exemplo o quadrado do elemento de comprimento de arco o mesmoem qualquer referencial inercial, que so aqueles em que so vlidas as leisde Newton. Este conceito foi estendido para todas as leis da fsica e nosomente as da mecnica. No contexto de referenciais inerciais relacionadospor transformaes de Lorentz, a invarincia do comprimento de arco
ds2 = ds2, (2.2.9)
pode ser utilizada para definirmos o tempo prprio de uma partcula. Paraisto considere que com relao a um dado referencial inercial observa-se omovimento arbitrrio de uma partcula. Em cada momento de tempo estemovimento pode ser considerado uniforme, assim em cada momento de tempopodemos associar partcula um referencial inercial rigidamente ligado a ela.Aps transcorrido um intervalo de tempo infinitesimal dt medido no referen-cial de repouso, a partcula se desloca de
dx2 + dy2 + dz2, tambm medido
pelo observador em repouso. Considerando que a partcula est rigidamenteligada a origem de seu referencial prprio, dx2+dy2+dz2 = 0. A invarinciado elemento de comprimento de arco, Eq. (2.2.9) fornece
c2dt2 (dx2 + dy2 + dz2
)= c2d 2,
onde o tempo prprio da partcula. Nesta forma a invarincia do com-primento de arco permite relacionarmos o tempo prprio da partcula que sedesloca com rapidez (arbitrria) v com o tempo medido por um observadorem em repouso em um referencial inercial, fornecendo
=
t2
t1
1 (v
c
)2dt.
-
46CAPTULO 2. TPICOS SELECIONADOS DE CLCULO VARIACIONAL E EQUAES DE LAGRANGE
para o intervalo de tempo prprio calculado ao longo da trajetria dapartcula no espao de MInkowisk. O valor mximo dessa integral obtidopara uma partcula em repouso ou se deslocando com velocidade constante,fornecendo nestes casos a curva que fornece um mximo para o funcional.Note que quanto maior a velocidade, menor o valor do funcional, portanto omnimo de obtido para o valor limite da rapidez v = c, enquanto que omximo v = 0.
Exemplo 2.2.5. A Lagrangiana de uma partcula em um campo eletromag-ntico externo
L =mv2
2 e + e
v
c A,
como anteriormente deduzido. As equaes de Lagrange em coordenadascartesianas, fornecem
L
xi= e
xi+ e
v
cA
xi,
L
vi= mvi +
e
cAi,
portanto
d
dt
(L
qi
)
L
qi= 0 m
dvidt
+e
c
Aidxj
vj +e
c
Ait
+ e
dxi
v
cA
xi= 0.
Note que
e
c
Aidxj
vj ev
cA
xi=
e
c
Aidxj
vj evjcAjxi
=
e
c
Aidxj
vj evjcAjxi
= e
(Aidxj
Ajxi
)vjc
,
Definindo
Fij =Aidxj
Ajxi
,
obtemos a equao de movimento na forma
mdvidt
= e
dxi eFij
vjc
,
ou equivalentemente
mdv
dt= eE +
e
cv B.
-
2.2. O PRINCPIO DE HAMILTON E AS EQUAES DE LAGRANGE.47
Exemplo 2.2.6. A ao de Polyakov definida como
S = c
d1
2
(x2
e+ em2
)
, (2.2.10)
onde considera-se e() outro grau de liberdade alm de x. Das equaes deLagrange para as coordenadas generalizadas
(q1, q2) = (x, e) ,
obtm-se as equaes de movimento
d
d
(x
e
)
= 0,
x2
e2 m2 = 0. (2.2.11)
A segunda equao fornece
e =
x2
m.
Esta equao fixa o valor da varivel dinmica e, que de fato no indepen-dente mas sim vinculada. Algumas caractersticas gerais desta ao que atornam uma melhor escolha que a ao dada pela Eq.(2.2.8) a ausncia deuma raiz quadrada, o que geralmente leva a teorias no locais, e a existn-cia de um limite para partculas com massa nula. Note que substituindo aexpresso do campo e na ao de Polyakov obtm-se
S = c t2
t1
d1
2
(x2
x2
m
+
x2
mm2
)
= mc t2
t1
d
x2
= mc t2
t1
dxdx,
que coincide com a ao dada na Eq. (2.2.8). Ou seja as duas aes soequivalentes, e portanto fornecem as mesmas equaes de movimento. Outroaspecto interessante que para a escolha do parmetro como sendo oparmetro natural teremos
xx = 1,
portanto
e =1
m(2.2.12)
-
48CAPTULO 2. TPICOS SELECIONADOS DE CLCULO VARIACIONAL E EQUAES DE LAGRANGE
interessante procurar saber de onde ou o que motiva escrever esta ao.Aps o aparecimento da Teoria de Cordas, vrios modelos, aes, para
partculas relativsticas, em particular a ao Eq. (2.2.10), foram conside-rados, com o objetivo de se compreender o processo de quantizao paraposterior utilizao em teorias de cordas devido s dificuldades inerentes domodelo.
2.2.2 Lagrangianas Equivalentes
Uma propriedade muito importante no formalismo lagrangiano que as la-grangianas que diferem da derivada total no tempo de uma funo das coor-denadas generalizadas e do tempo, fornecem as mesmas equaes de movi-mento. Explicitamente
Afirmao 2.2.7. Dado L e
L = L +dF (q, t)
dt,
e exigindo que a funo F se anula nos extremos de integrao
F (q(t1), t1) = F (q(t2), t2) = 0,
as equaes de movimento obtidas de L e L sero as mesmas.
Demonstrao. O clculo da ao S devido a Lagrangiana L
S =
t2
t1
Ldt
=
t2
t1
Ldt +
t2
t1
dF (q, t)
dtdt
=
t2
t1
Ldt +
:0F (q(t2), t2)
:0
F (q(t1), t1)
= S,
portanto S = S de onde segue que as equaes de Lagrange e portanto asequaes de movimento so as mesmas.
Exemplo 2.2.8. Transformaes de gauge. Considere a Lagrangiana deuma partcula com massa m, carga e em um campo eletromagntico externo,representado pelos campos A(r, t) e (r, t),
L =mv2
2 e + e
v
c A.
-
2.2. O PRINCPIO DE HAMILTON E AS EQUAES DE LAGRANGE.49
Como a Lagrangiana se transforma quando os campos so submetidos a trans-formao de gauge
A A = A + ,
Exemplo 2.2.9. Construa a Lagrangiana para um pndulo simples commassa m cujo ponto de suporte:
1. move-se uniformemente em um circulo vertical com raio a com frequn-cia constante ,
2. oscila horizontalmente no plano de movimento do pndulo de acordocom a lei x = a cos t,
nas quais a derivada total de um termos que depende das coordenadas e dotempo deve ser omitido.
2.2.3 Multiplicadores de Lagrange e vnculos holnomos
Considere a Lagrangiana
S = c
d1
2
(x2
e+ em2
)
J sabemos que esta ao possui somente uma varivel independente devidoque as variveis e e x esto relacionadas via Eq. (2.2.11), porm podemosproceder como se a ao dependesse de duas variveis independentes, ou seja
(q1, q2) = (x, e) .
Neste caso a ao um funcional da forma
S =
t2
t1
L (q1, q2, q1, q2, t) dt
=
t2
t1
L (x, e, x, e, t) dt.
As trajetrias variadas so
q1(t, ) = q1(t) + 1(t),
q2(t, ) = q2(t) + 2(t).
-
50CAPTULO 2. TPICOS SELECIONADOS DE CLCULO VARIACIONAL E EQUAES DE LAGRANGE
A variao da ao da forma
S =
t2
t1
[
d
dt
(L
q1
)
+L
q1
]
1(t)dt
+
t2
t1
[
d
dt
(L
q2
)
+L
q2
]
2(t)dt.
Note entretanto que as variveis x e e no so independentes consequente-mente cada um dos integrandos no so independentes e portanto no sonulos. Considere a situao mais simples em que as equaes de vnculossejam relaes geomtricas entre as coordenadas e no entre coordenadas evelocidades ou seja considere que os vnculos sejam holnomos
f(1, , n, t) = 0,
que para duas variveis como estamos considerando torna-se
f(q1 q2, t) = 0. (2.2.13)
O diferencial desta expresso fornece
df =f
q1q1 +
f
q2q2 = 0 =
f
q11 +
f
q22 = 0 =
2 = fq1fq2
1.
Substituindo na expresso da ao variada obtem-se que
S =
t2
t1
[
d
dt
(L
q1
)
+L
q1
]
1(t)dt
t2
t1
[
d
dt
(L
q2
)
+L
q2
] fq1fq2
1dt
=
t2
t1
{[
d
dt
(L
q1
)
+L
q1
]
[
d
dt
(L
q2
)
+L
q2
] fq1fq2
}
1dt.
Nesta forma o integrando depende somente de um parmetro, 1, e a im-posio que a ao seja estacionria pode agora ser obtida da utilizao do
-
2.2. O PRINCPIO DE HAMILTON E AS EQUAES DE LAGRANGE.51
Teorema Fundamental do Clculo das Variaes, portanto
[
d
dt
(L
q1
)
+L
q1
]
[
d
dt
(L
q2
)
+L
q2
] fq1fq2
= 0 =
[
d
dt
(L
q1
)
+L
q1
]1fq1
[
d
dt
(L
q2
)
+L
q2
]1fq2
= 0 =
ou na forma
[
d
dt
(L
q1
)
+L
q1
](f
q1
)1=
[
d
dt
(L
q2
)
+L
q2
](f
q2
)1.
O lado esquerdo dessa equao uma funo de L, f , q1 e t enquanto queo lado direito funo de L, f, q2 e t. Isto significa que os dois membrosdevem ser iguais a uma funo que no depende de q1 e q2 e no mximo dotempo porque q1 e q2 so funes do tempo que escolhemos como (t). Destaforma obteremos
d
dt
(L
q1
)
L
q1 (t)
f
q1= 0, (2.2.14)
d
dt
(L
q2
)
L
q2 (t)
f
q2= 0. (2.2.15)
O problema torna-se determinado: temos trs variveis incgnitas e trsequaes, duas de movimento Eqs. (2.2.14, 2.2.15) e uma de vnculo Eq.(2.2.13). Estas expresses sugerem que pode-se considerar a variao daseguinte ao
S =
t2
t1
[L (q1, q2, q1, q2, t) + f(q1, q2)] dt,
j que
S =
t2
t1
2
i=1
{[
d
dt
(L
qi
)
+L
qi
]
+ f
qi
}
idt,
resultando nas mesmas equaes anteriores. De fato o procedimento utilizadona variao da ao S simplesmente o procedimento usual utilizado emproblemas variacionais isoperimtricos.
-
52CAPTULO 2. TPICOS SELECIONADOS DE CLCULO VARIACIONAL E EQUAES DE LAGRANGE
2.3 Invarincia, Teorema de Noether e CargasConservadas
Na obteno das equaes de Lagrange de um princpio variacional, considerou-se trajetrias variadas
y(x, ) = y(x) + (x),
considerando-se que as trajetrias variadas coincidam com a original nosextremos de integrao:
(x1) = (x2) = 0.
O interesse em considerar a variao da ao com extremos fixos que esteprocedimento fornece diretamente as equaes de Lagrange. Entretanto exis-tem vrios problemas fsicos de interesse para os quais essa condio pode serrelaxada, por exemplo o problema de se encontrar qual a curva que fornece amenor distncia para uma partcula em queda livre cuja coordenada inicial fixa x1 mas a posio final pode estar em qualquer pontos y < 0 de umalinha vertical. Pode-se em princpio considerar as variaes mais gerais almdaquelas em que os extremos de integrao no so fixos, por exemplo
q(, t) = q(t) + (q, q; t), (2.3.1)
com (q(t1), q(t1), t1) 6= 0 e (q(t2), q(t2), t2) 6= 0.O objetivo de considerar tais classes de transformaes que rotaes e
translaes no espao em todos os pontos, inclusive nos extremos, estarorepresentadas por estas transformaes as quais so de grande utilidade noestudo das simetrias da ao. Neste sentido pode-se tambm levar em contatranslaes no tempo, entretanto para isto deve-se considerar uma transfor-mao independente
t t = t + . (2.3.2)
Por analogia com a generalizao da variao Eq.(2.3.1) considera-se umavariao mais geral, da forma
T = t + (q, q; t), (2.3.3)
consequentemente
q(, t) Q (, T ) = q(T (q, q; t)) + (q, q; t).
= q(T ) dq
dt(q, q; t) + (q, q; t) (2.3.4)
-
2.3. INVARINCIA, TEOREMADE NOETHER E CARGAS CONSERVADAS53
Na funo foi mantida a varivel t porque esta j est multiplicada peloparmetro . Calcula-se ento, sob que condies a ao ser estacionria,para isto necessrio variarmos a ao modificada
S = T2
T1
L[Q, Q; T
]dT,
onde
Q =dQ(T )
dT.
Note que a derivada temporal com relao a varivel em pauta,
q =dq
dt,
portanto, com a varivel independente da funo que pode ser a modificadaou no.A variao da ao em primeira ordem no parmetro fornece
S = T2
T1
L[Q, Q; T
]dT
= T2 L[Q, Q; T
]T2
T1 L[Q, Q; T
]T1
+
T2
T1
L[Q, Q; T
]dT.
A variao do integrando em primeira ordem em
T2
T1
L[Q, Q; T
]dT =
T2
T1
L[Q, Q; T
]
QQ +
L[Q, Q; T
]
QQ +
L[Q, Q; T
]
TT
dT.
Da Eq. (2.3.1 ) obtm-se que
Q =
[
(q, q; t) dq
dt(q, q; t)
]
,
e que
Q =d
dTQ.
Integrando por partes o segundo termo, tm-se que
T2
T1
L[Q, Q; T
]
QQdT =
L[Q, Q; T
]
QQ
T2
T1
T2
T1
d
dT
L[Q, Q; T
]
Q
QdT.
-
54CAPTULO 2. TPICOS SELECIONADOS DE CLCULO VARIACIONAL E EQUAES DE LAGRANGE
a variao T = , com isto aa variao da ao pode ser escrita como
S = T2
T1
L[Q, Q; T
]dT
= 2 L[Q, Q; T
]T2
1 L[Q, Q; T
]T1
+
T2
T1
L[Q, Q; T
]
QQ
d
dT
L[Q, Q; T
]
Q
Q +L[Q, Q; T
]
T
dT
+L[Q, Q; T
]
QQ
T2
T1
.
Devido a que todos os termos so proporcionais a as derivadas parciaispodem ser calculadas em = 0 para que somente termos lineares em sejam considerados, portanto
S = T2
T1
L[Q, Q; T
]dT
= 2 L [q, q; t]|t2 1 L [q, q; t]|t1
+
T2
T1
{L [q, q; t]
qQ
d
dt
(L [q, q; t]
q
)
Q +L [q, q; t]
t
}
dt
+L [q, q; T ]
qQ
t2
t1
.
Em particular se a lagrangiana no depender explicitamente do tempo, aexpresso no possuir a derivada explicita no tempo. a variao pode serreescrita como
S = T2
T1
L[Q, Q
]dT
+
T2
T1
{[L [q, q]
q
d
dt
(L [q, q]
q
)][
(q, q; t) q
t(q, q; t)
]}
dt
+
{[
L [q, q] L [q, q]
qq
]
+L [q, q]
q(q, q; t)
}
t2
t1
.
(2.3.5)Esta expresso representa a variao da ao quando as trajetrias variadas eo tempo dependem de funes e bastante gerais, portanto esta expressogeneraliza a expresso Eq. (2.2.1) com a condio que a ao seja estacionrialevando s equaes de Lagrange. Isto significa que na variao dada pela Eq.
-
2.3. INVARINCIA, TEOREMADE NOETHER E CARGAS CONSERVADAS55
(2.3.5) deve seguir as equaes de Lagrange e algo mais. Considere ento queas trajetrias q(t) satisfaam s equaes de Lagrange, ou seja so soluesdas equaes ee Lagrange, neste caso
L [q, q]
q
d
dt
(L [q, q]
q
)
= 0,
e a variao Eq. (2.3.5) reduz-se a
S =
{[
L [q, q] L [q, q]
qq
]
+L [q, q]
q(q, q; t)
}
t2
t1
,
que deve ser invariante, portanto
{[
L [q, q] L [q, q]
qq
]
+L [q, q]
q(q, q; t)
}
t2
t1
= 0,
ou equivalentemente[
L [q, q] L [q, q]
qq
]
+L [q, q]
q(q, q; t) = Constante.
Teorema 2.3.1. Se a ao S for invariante sob as transformaes Eqs.(2.3.3,2.3.4) ento a quantidade
[
L [q, q] L [q, q]
qq
]
+L [q, q]
q(q, q; t),
onde L a lagrangiana do sistema, constante de movimento .
Este teorema devido a fsica Emmy Noether. So nas aplicaes emteoria quntica dos campos e partculas elementares que fica evidente todaa utilidade e importncia deste teorema.
-
56CAPTULO 2. TPICOS SELECIONADOS DE CLCULO VARIACIONAL E EQUAES DE LAGRANGE
-
Captulo 3
Equaes de Movimento deHamilton
3.1 Introduo
Este texto uma adaptao informal da referncia com material coletado devrias outras referncias.
3.2 Transformaes de Legendre
57
-
58 CAPTULO 3. EQUAES DE MOVIMENTO DE HAMILTON
-
Referncias Bibliogrficas
[1] S. P. Novikov (auth.) B. A. Dubrovin, A. T. Fomenko. Modern Geo-metry, Methods and Applications: Part I. The Geometry of Surfaces,Transformation Groups, and Fields, volume Part 1 of Graduate Textsin Mathematics 93. Springer New York, 2nd ed edition, 1984. ISBN0387976639,9780387976631,3540976639.
[2] Sean Carrol. Space Time and Geometry An Introduction to General Re-lativity. Addison Wesley, 2004.
[3] John Safko Herbert Goldstein, Charles Poole. Classical Mechanics. Ad-dison Wesley, 3 edition, 2000.
[4] L.D. Landau and E.M. Lifshitz. Mechanics. Butterworth-Heinemann,Oxford, UK, 1981.
[5] L.D. Landau and E.M. Lifshitz. The Classical Theory of Fields.Butterworth-Heinemann, Oxford, UK, 1987.
[6] Nivaldo Lemos. Mecnica Analtica. Livraria da Fsica, 2007.
59
-
ndice Remissivo
bordo, 19
cadeia de simplexos, 20conexo afim, 36contravariante, 36
de Christoffel, 36Deslocamento virtual, 23deslocamento virtual., 23
Emmy Noether, 55Equao de Euler, 31espao de configuraes, 22exterior produ, 11
fator integrante, 19fechada, 18fibrados, 15formas diferenciais, 9
geodsica, 36
infinitesimal, 23
m-forma, 15mtrica de Minkowski, 43matriz mtrica, 34
pseudo-Riemanniana, 43
space of p- vectors, 11
tempo prprio, 45tensor mtrico, 34
60
Prlogo para Mecnica AnalticaFormas DiferenciaisIntroduo O Espao dos p-VetoresDerivada ExteriorSimplicies Euclideanos e o Teorema de Stokes
Coordenadas generalizadasEspao de configuraesDeslocamento virtual
Tpicos Selecionados de Clculo Variacional e Equaes de LagrangeAs Equaes de EulerNotao Variacional
O Princpio de Hamilton e as Equaes de Lagrange.Lagrangiana e equaes de movimento de uma partcula livre.Lagrangianas EquivalentesMultiplicadores de Lagrange e vnculos holnomos
Invarincia, Teorema de Noether e Cargas Conservadas
Equaes de Movimento de HamiltonIntroduo Transformaes de Legendre
AppendixReferncias Bibliogrficasndice