Matemática Básica -...
14
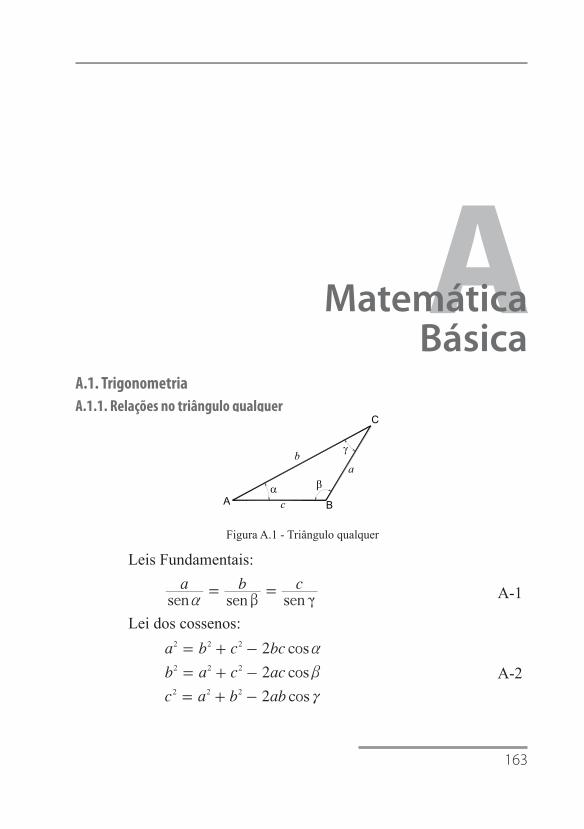
163 A Matemática Básica A.1. Trigonometria A.1.1. Relações no triângulo qualquer A c α β b a B γ C Figura A.1 - Triângulo qualquer Leis Fundamentais: sen sen sen a b c b c a = = A-1 Lei dos cossenos: 2 2 2 cos cos cos a b c bc b a c ac c a b ab 2 2 2 2 2 2 2 2 2 a b c = + - = + - = + - A-2
Transcript of Matemática Básica -...
Apêndice A - Matemática Básica
163
AMatemática Básica
A.1. TrigonometriaA.1.1. Relações no triângulo qualquer
A cα β
ba
B
γ
C
Figura A.1 - Triângulo qualquer
Leis Fundamentais:
sen sen sena b c
b ca= = A-1
Lei dos cossenos:2
2
2
cos
cos
cos
a b c bc
b a c ac
c a b ab
2 2 2
2 2 2
2 2 2
a
b
c
= + -
= + -
= + -
A-2
Mecanismos Articulados
164
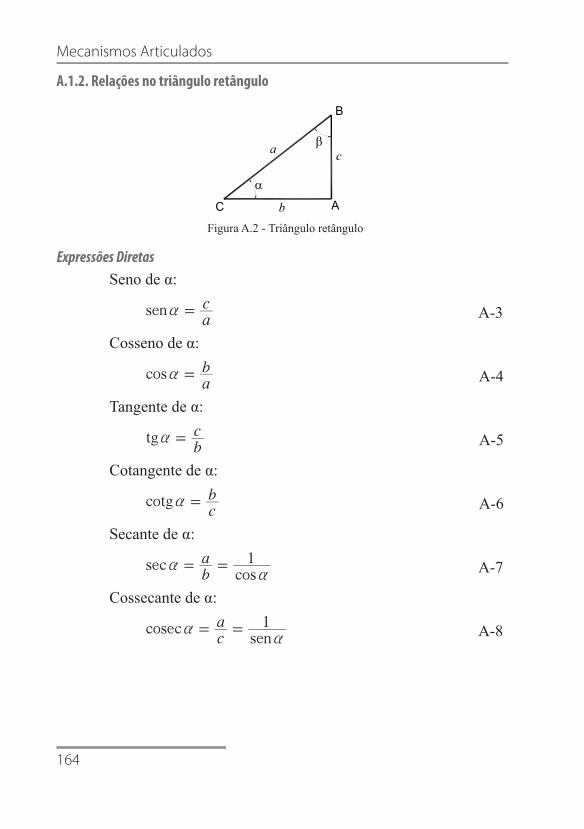
A.1.2. Relações no triângulo retângulo
α
C Ab
B
ca β
Figura A.2 - Triângulo retângulo
Expressões DiretasSeno de α:
senaca = A-3
Cosseno de α:
cosaba = A-4
Tangente de α:
tgbca = A-5
Cotangente de α:
cotgcba = A-6
Secante de α:
seccosb
a 1aa
= = A-7
Cossecante de α:
cosecsenc
a 1aa
= = A-8

Apêndice A - Matemática Básica
165
Ângulos notáveis
α 0°0
30°π/6
45°π/4
60°π/3
90°π/2
sen α 0 21
22
23 1
cos α 123
22
21 0
tg α 033 1 3 ∞
Figura A.3 - Ângulos notáveis.Projeções:
sen
cos
a c
a b
a
a
=
=A-9
A.1.3. Relações TrigonométricasRelação Fundamental
sen cosa a 12 2+ = A-10
Conseqüências:
1
1
1
1 sen cos
cos sen
tg sec
cotg cosec
a a
a a
a a
a a
2 2
2 2
2 2
2 2
- =
- =
+ =
+ =
A-11
Outras Relações:)
( )
) )
)
)
sen( sen
cos cos
sen( sen( cos
cos( sen
cos( sen
a a
a a
a a a
a a
a a
2 2
2
2
-
r r
r
r
=-
- =
- = + =
- =
+ =-
A-12
Mecanismos Articulados
166
A.1.4. Adição/Subtração de Arcos
( )
( )
( )1
sen sen cos sen cos
cos cos cos sen sen
tgtg tg
tg tg
a b a b b a
a b a b a b
a ba b
a b
! !
! "
!"
!
=
=
=
A-13
Conseqüências:
1
sen sen cos
cos cos sen
tgtg
2tg
a a a
a a a
aa
a
2 2
2
2
2 2
2
=
= -
=-
A-14
Arco Metade
1
sen cos
cos cos
tgcoscos
a a
a a
aaa
2 21
2 21
21
!
!
!
= -
= +
=+-
A-15
Em Função do Arco Metade
sentg
tg
costg
tg
tgtg
tg
1
2
1
1
1
2
2
2
2
2
2
2
2
2
2
2
a
a
a
=+
=+
-
=-
a
a
a
a
a
a
A-16
Apêndice A - Matemática Básica
167
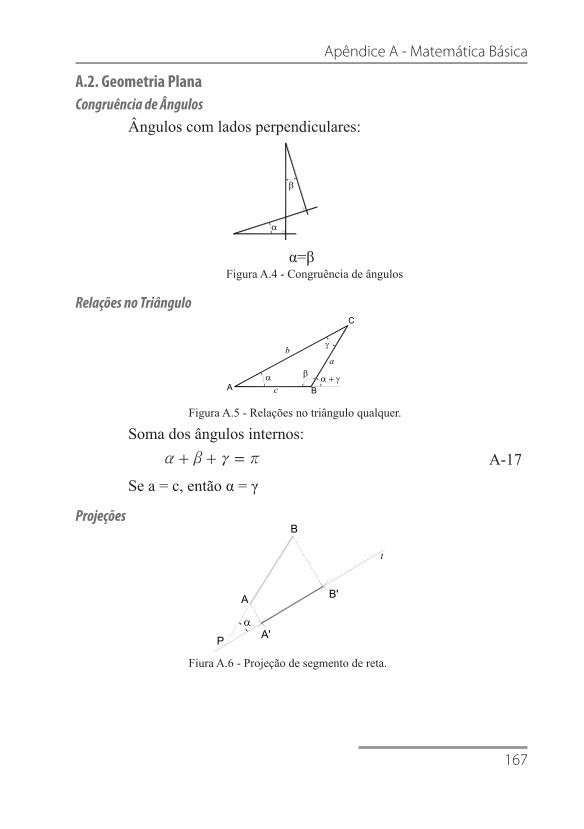
A.2. Geometria PlanaCongruência de Ângulos
Ângulos com lados perpendiculares:
α
β
α=βFigura A.4 - Congruência de ângulos
Relações no Triângulo
βαA c
b
α + γB
a
γ
C
Figura A.5 - Relações no triângulo qualquer.
Soma dos ângulos internos:a b c r+ + = A-17
Se a = c, então α = γ
Projeções
P
αA'
A
B
B'
t
Fiura A.6 - Projeção de segmento de reta.

Mecanismos Articulados
168
Sobre a reta t:Proj AB A Bt = l l A-18
Ou:cosProj AB ABt a= A-19
Distância de B a t:senBB PB a=l A-20
A.3. DiferenciaçãoDiferenciais Básicas:
0
1
2
dxda se a for constante
dxdx
dxdx x
dxdx nx
nn
2
1
=
=
=
= -
A-21
Funções Transcendentais:
( )
ln
dxd
x x
dxd x
x
dxd e e
1 1
1
x x
2=-
=
=
A-22
Funções Trigonométricas:
sen cos
cos sen
tg seccos
dxd x x
dxd x x
dxd x x
x12
2
=
=-
= =
A-23

Apêndice A - Matemática Básica
169
Regras de Diferenciação:Considerando u e v funções em x:
( )
( )
dxd u v
dxdu
dxdv
dxd u v
dxdu v u
dxdv
dxd
vu
v
v udxdu
dxdv
2
$ $ $
$ $
+ = +
= +
=-
A-24
Considerando v função de u, e u função de x:
dxdv
dudv
dxdu$= A-25
Exemplo:
( )sen sendxd x
dxd x2 2
= A-26
Vamos fazer:senu x v u2
&= = A-27Logo:
cos sen
sen cos
dxdu x e
dudv u x
dxdv
dudv
dxdu x x
2 2
2& $
= = =
= =A-28

Mecanismos Articulados
170
Apêndice B - Sistemas Trigonométricos
171
BSistemas Trigonométricos
Nas cadeias cinemáticas de forma geral, a solução do sistema composto pelas equações de restrição nos leva aos deslocamentos das barras associadas às coordenadas generalizadas. O problema se dá pelo fato de estas equações não serem lineares visto que, as incógnitas nor-malmente são argumentos de funções trigonométricas. Em verdade co-ordenadas angulares, normalmente associadas a pares rotativos, levam a argumento de função trigonométrica e coordenadas lineares, associa-das a pares prismáticos levam a incógnitas lineares de fácil solução.
Um outro problema abordado neste apêndice diz respeito à in-versão das matrizes jacobianas em cadeias compostas que, como vere-mos, apesar de serem matrizes de ordem superior a dois, estas podem sempre ser rearranjadas em blocos de forma a que possamos encontrar a solução pela inversão de uma seqüência de matrizes quadradas.
B.1. Equações para o Mecanismo Biela-manivelaNo caso do mecanismo biela-manivela, quase sempre vamos
ter uma coordenada secundária associada a um par cinemático prismá-tico e isto vai nos levar a uma incógnita linear no sistema de equações
Mecanismos Articulados
172
facilitando sobremaneira a solução do problema. Considerando, para incógnitas do sistema, as variáveis φ e x, as duas situações mais comuns levam às equações do tipo B-1 e B-3 a seguir.
B-1
Tendo apenas uma incógnita como argumento de uma função trigonométrica, a solução para o sistema de equações em B-1 é imedia-ta em φ e simples de se obter em x a partir da soma dos quadrados dos termos b sen φ e b cos φ, após isolados no sistema.
B-2
Uma outra inversão, também muito comum em mecanismos biela-manivela, tem o sistema de equações B-3 para equações de res-trição.
B-3
O ponto de partida para a solução de B-3 consiste em se isolar x sen φ e x cos φ nas duas equações do sistema, para em seguida obter-se φ pela divisão da primeira pela segunda, e x pela soma dos quadrados, equação B-4.
B-4
Nos dois casos, equações B-2 e B-4, o sinal do radical será único, mas definido em função de cada geometria e análise de alguma impossibilidade para sinal positivo ou negativo.
B.2. Equações para o Quadrilátero ArticuladoB.2.1. Equação em Seno e Cossseno
Antes de darmos prosseguimento às equações para o quadrilá-tero articulado, vamos procurar uma solução para a equação trigonomé-trica em B-5, que iremos utilizar mais adiante.
B-5

Apêndice B - Sistemas Trigonométricos
173
Neste caso, a substituição de seno e cosseno pelas identidades trigonométricas em B-6,
B-6
vai nos levar à equação B-7.
B-7
que tem para solução:
B-8
Note que se a equção B-5 tivesse a forma:
B-9com os mesmos procedimentos ou substituido b negativamente em B-8, chegaríamos a:
B-10
B.2.2. Sistema do QuadriláteroNeste caso as duas incógnitas serão angulares e portanto o sis-
tema será transcedental nas variáveis α e β, levando-nos a uma equação do tipo:
B-11
Se isolarmos A sen α e A cos α nas duas equações do sistema, e somarmos os seus quadrados, vamos obter:
B-12onde:
B-13
sendo a equação B-12 similar a B-5 vamos obter a solução para α, a partir de B-8, como sendo:
Mecanismos Articulados
174
B-14
Da mesma forma, se isolarmos agora B sen β e B cos β nas duas equações do sistema B-11, e efetuarmos os mesmos procedimentos an-teriores com:
B-15
vamos obter, para solução de β:
B-16
Para o caso em que se tenha B negativo em uma das linhas do sistema, como em B-17, por exemplo.
B-17
não teremos mudança para o valor de α, porém a solução para β torna-se:
B-18
Onde, mais uma vez em todos os casos, o sinal do radical deve-rá ser único e definido para cada caso, em função da análise geométrica de alguma impossibilidade para sinal positivo ou negativo.
A.3. Matrizes Jacobianas em Cadeias CompostasAntes de passarmos à situação geral, vejamos o caso de uma
cadeia imposta com oito barras ou de qualquer cadeia não imposta com seis barras secundárias. O problema nos levará a uma equação matricial do tipo B-15:
Note que se a matriz jacobiana do sistema não estiver na forma da equação B-15, esta poderá ter as suas colunas recambiadas, natu-ralmente que com as respectivas linhas das matrizes colunas B e C, de modo a se ter este formato.
Apêndice B - Sistemas Trigonométricos
175
B-19
Após assumir este formato, podemos subdividir a matriz prin-cipal em blocos, junto com as suas respectivas submatrizes coluna, sen-do a primeira delas:
B-20
que irá fornecer, sem problemas, os valores de b1 e b2 pela inversão de uma matriz quadrada simples. Agora, com b2 conhecido, podemos montar o segundo bloco:
B-21
que fornecerá, novamente pela inversão de uma matriz quadrada, os va-lores de b3 e b4. E então, com b4 conhecido, chegamos ao último bloco:
B-22
onde vamos obter os dois últimos valores b5 e b6, resolvendo o proble-ma.
Passemos agora ao caso geral em que possamos ter n equa-ções de restrição levando em conseqüência a uma matriz jacobiana n×n. Como esta matriz deriva-se de uma cadeia cinemática é possível se pro-var que ela pode ser posta na forma de uma matriz em que:
a. aij = 0 para j > i, com exceção dos termos sucessivos, na linha, a aii, com i ímpar.
b. aij = 0 para j < i+1, com exceção dos termos antecessores, na linha, ao antecessor de aii, com i par.
Mecanismos Articulados
176
Caso n seja igual a seis, temos um exemplo desta matriz no equação B-15.
Para este caso, após determinado o primeiro bloco como em B-15, os blocos sucessivos, i = 3 até n–1 de dois em dois sempre ímpar, serão determinados por:
B-23Onde o valor bi-1 sempre será conhecido a partir do bloco an-
terior e os valores de bi e bi+1 podem ser obtidos pela inversão de uma simples matriz quadrada.