Manuale DELL’ALLIEVO NAUTICO Tavole Nautiche · Ril v = Rilevamento vero Pv = Prora vera Ril b =...
34
Manuale DELL’ALLIEVO NAUTICO Tavole Nautiche
Transcript of Manuale DELL’ALLIEVO NAUTICO Tavole Nautiche · Ril v = Rilevamento vero Pv = Prora vera Ril b =...
Manuale
DELL’ALLIEVO NAUTICO
Tavole Nautiche
1
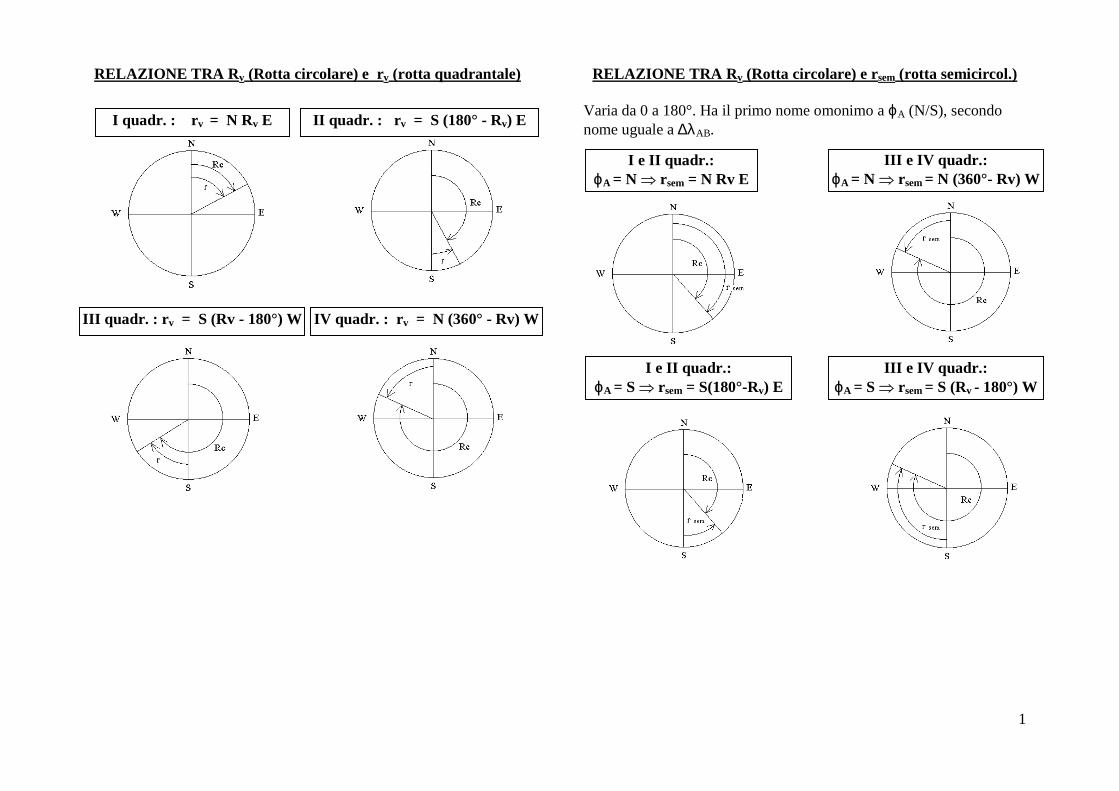
RELAZIONE TRA R v (Rotta circolare) e rv (rotta quadrantale)
RELAZIONE TRA R v (Rotta circolare) e rsem (rotta semicircol.)
Varia da 0 a 180°. Ha il primo nome omonimo a ϕA (N/S), secondo nome uguale a ∆λAB.
I e II quadr.: ϕA = N ⇒ rsem = N Rv E
III e IV quadr.: ϕA = N ⇒ rsem = N (360°- Rv) W
I e II quadr.: ϕA = S ⇒ rsem = S(180°-Rv) E
III e IV quadr.: ϕA = S ⇒ rsem = S (Rv - 180°) W
I quadr. : r v = N Rv E II quadr. : r v = S (180° - Rv) E
III quadr. : r v = S (Rv - 180°) W IV quadr. : r v = N (360° - Rv) W
2
CORREZIONI E CONVERSIONI DI ROTTE E RILEVAMENTI
FORMULE DI CORREZIONE : dRilRil bv ++= δ
drscbv lldPR ++++= δ
FORMULE DI CONVERSIONE :
δ−−= dRilRil vb
δ−−−−= dllRP scdrvb
Se il risultato finale è < 0° o > 360° rispettivamente si somma o si sottrae 360°. Rilv = Rilevamento vero Pv = Prora vera Rilb = Rilevamento bussola Pb = Prora bussola Rilm = Rilevamento magnetico Pm = Prora magnetica Rvs = Rotta vera superficie Rvf = rotta vera fondo δ = deviazione bussola d = declinazione magnetica ldr = angolo di deriva lsc = angolo di scarroccio
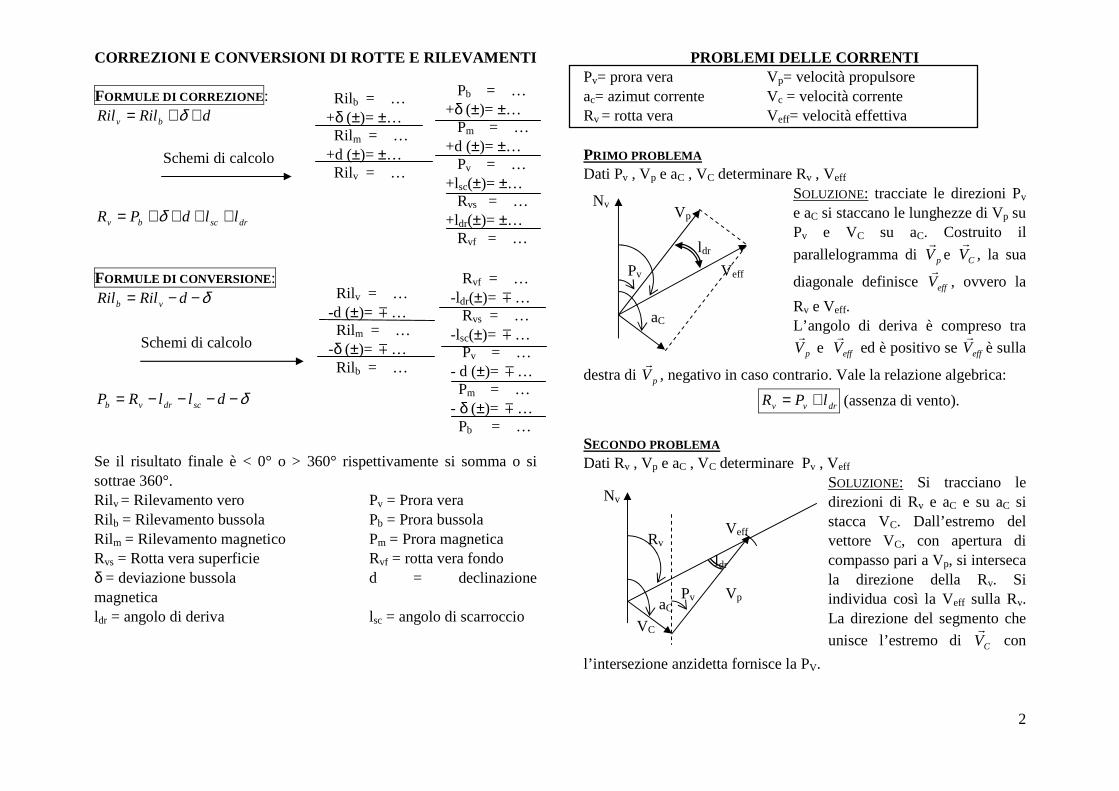
PROBLEMI DELLE CORRENTI Pv= prora vera Vp= velocità propulsore ac= azimut corrente Vc = velocità corrente Rv = rotta vera Veff= velocità effettiva PRIMO PROBLEMA Dati Pv , Vp e aC , VC determinare Rv , Veff
SOLUZIONE: tracciate le direzioni Pv e aC si staccano le lunghezze di Vp su Pv e VC su aC. Costruito il
parallelogramma di pVr
e CVr
, la sua
diagonale definisce effVr
, ovvero la
Rv e Veff. L’angolo di deriva è compreso tra
pVr
e effVr
ed è positivo se effVr
è sulla
destra di pVr
, negativo in caso contrario. Vale la relazione algebrica:
drvv lPR += (assenza di vento).
SECONDO PROBLEMA Dati Rv , Vp e aC , VC determinare Pv , Veff
SOLUZIONE: Si tracciano le direzioni di Rv e aC e su aC si stacca VC. Dall’estremo del vettore VC, con apertura di compasso pari a Vp, si interseca la direzione della Rv. Si individua così la Veff sulla Rv. La direzione del segmento che
unisce l’estremo di CVr
con
l’intersezione anzidetta fornisce la PV.
Schemi di calcolo
Schemi di calcolo
Rilv = … -d (±)= m … Rilm = … -δ (±)= m … Rilb = …
Rilb = … +δ (±)= ±… Rilm = … +d (±)= ±… Rilv = …
Pb = … +δ (±)= ±… Pm = … +d (±)= ±… Pv = … +lsc(±)= ±… Rvs = … +ldr(±)= ±… Rvf = …
Rvf = … -ldr(±)= m … Rvs = … -lsc(±)= m … Pv = … - d (±)= m … Pm = … - δ (±)= m … Pb = …
Pv
aC
Vp
Veff
ldr
Nv
VC
Rv
Pv aC
Vp
Veff
ldr
Nv
3
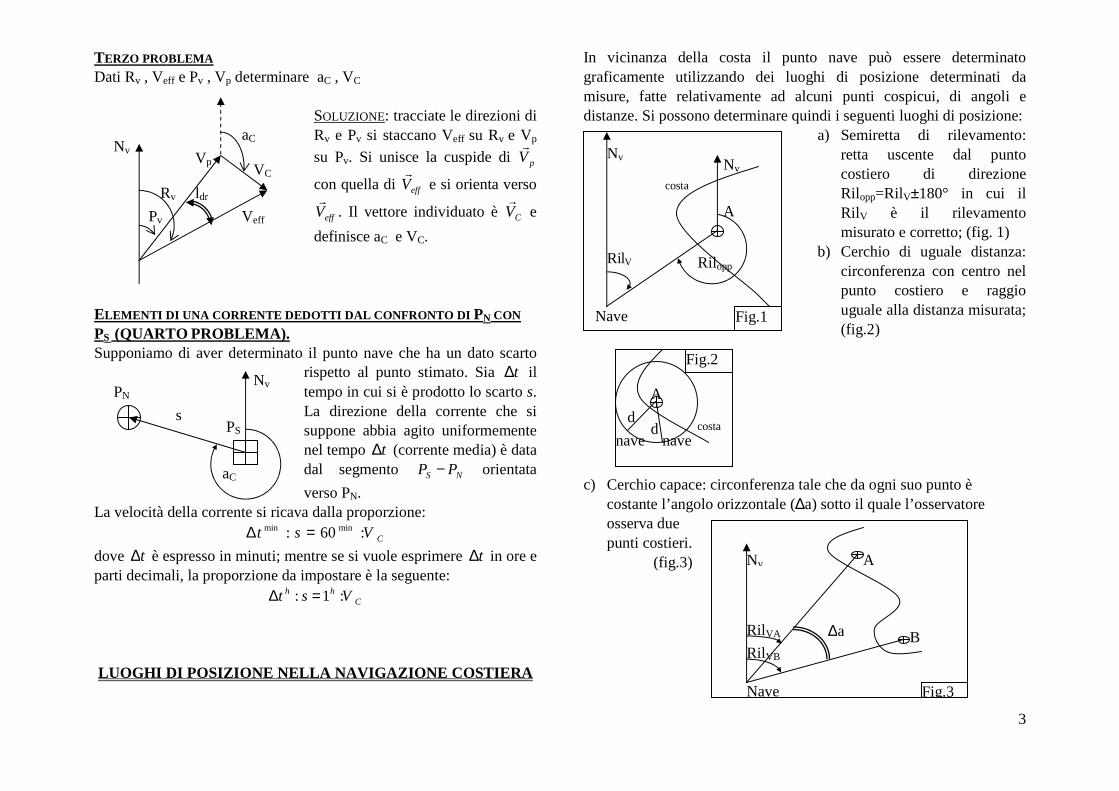
TERZO PROBLEMA Dati Rv , Veff e Pv , Vp determinare aC , VC
SOLUZIONE: tracciate le direzioni di Rv e Pv si staccano Veff su Rv e Vp
su Pv. Si unisce la cuspide di pVr
con quella di effVr
e si orienta verso
effVr
. Il vettore individuato è CVr
e
definisce aC e VC.
ELEMENTI DI UNA CORRENTE DEDOTTI DAL CONFRONTO DI PN CON
PS (QUARTO PROBLEMA). Supponiamo di aver determinato il punto nave che ha un dato scarto
rispetto al punto stimato. Sia t∆ il tempo in cui si è prodotto lo scarto s. La direzione della corrente che si suppone abbia agito uniformemente nel tempo t∆ (corrente media) è data dal segmento NS PP − orientata
verso PN. La velocità della corrente si ricava dalla proporzione:
CVst :60: minmin =∆
dove t∆ è espresso in minuti; mentre se si vuole esprimere t∆ in ore e parti decimali, la proporzione da impostare è la seguente:
Chh Vst :1: =∆
LUOGHI DI POSIZIONE NELLA NAVIGAZIONE COSTIERA
In vicinanza della costa il punto nave può essere determinato graficamente utilizzando dei luoghi di posizione determinati da misure, fatte relativamente ad alcuni punti cospicui, di angoli e distanze. Si possono determinare quindi i seguenti luoghi di posizione:
a) Semiretta di rilevamento: retta uscente dal punto costiero di direzione Rilopp=RilV±180° in cui il RilV è il rilevamento misurato e corretto; (fig. 1)
b) Cerchio di uguale distanza: circonferenza con centro nel punto costiero e raggio uguale alla distanza misurata; (fig.2)
c) Cerchio capace: circonferenza tale che da ogni suo punto è costante l’angolo orizzontale (∆a) sotto il quale l’osservatore osserva due punti costieri.
(fig.3)
A
Nave
RilV Rilopp
Nv Nv
costa
Fig.1
A
costa d
d nave nave
Fig.2
Rv
Pv
aC
Vp
Veff
VC
ldr
Nv
PN
PS s
aC
Nv
A
B RilVA
RilVB
∆a
Nv
Nave Fig.3
4
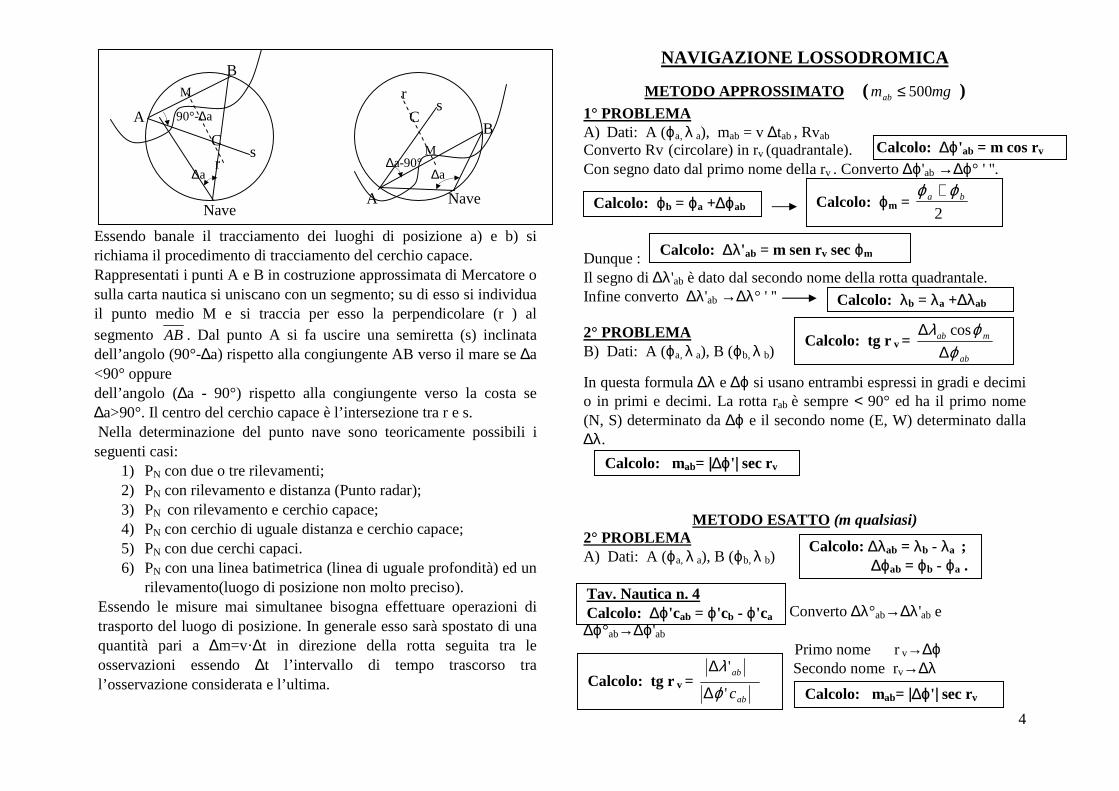
Essendo banale il tracciamento dei luoghi di posizione a) e b) si richiama il procedimento di tracciamento del cerchio capace. Rappresentati i punti A e B in costruzione approssimata di Mercatore o sulla carta nautica si uniscano con un segmento; su di esso si individua il punto medio M e si traccia per esso la perpendicolare (r ) al segmento AB . Dal punto A si fa uscire una semiretta (s) inclinata dell’angolo (90°-∆a) rispetto alla congiungente AB verso il mare se ∆a <90° oppure dell’angolo (∆a - 90°) rispetto alla congiungente verso la costa se ∆a>90°. Il centro del cerchio capace è l’intersezione tra r e s. Nella determinazione del punto nave sono teoricamente possibili i seguenti casi:
1) PN con due o tre rilevamenti; 2) PN con rilevamento e distanza (Punto radar); 3) PN con rilevamento e cerchio capace; 4) PN con cerchio di uguale distanza e cerchio capace; 5) PN con due cerchi capaci. 6) PN con una linea batimetrica (linea di uguale profondità) ed un
rilevamento(luogo di posizione non molto preciso). Essendo le misure mai simultanee bisogna effettuare operazioni di trasporto del luogo di posizione. In generale esso sarà spostato di una quantità pari a ∆m=v·∆t in direzione della rotta seguita tra le osservazioni essendo ∆t l’intervallo di tempo trascorso tra l’osservazione considerata e l’ultima.
NAVIGAZIONE LOSSODROMICA
METODO APPROSSIMATO ( mgmab 500≤ ) 1° PROBLEMA A) Dati: A (ϕa, λ a), mab = v ∆tab , Rvab Converto Rv (circolare) in rv (quadrantale). Con segno dato dal primo nome della rv . Converto ∆ϕ'ab →∆ϕ° ' ''. Dunque : Il segno di ∆λ'ab è dato dal secondo nome della rotta quadrantale. Infine converto ∆λ'ab →∆λ° ' '' 2° PROBLEMA B) Dati: A (ϕa, λ a), B (ϕb, λ b)
In questa formula ∆λ e ∆ϕ si usano entrambi espressi in gradi e decimi o in primi e decimi. La rotta rab è sempre < 90° ed ha il primo nome (N, S) determinato da ∆ϕ e il secondo nome (E, W) determinato dalla ∆λ.
METODO ESATTO (m qualsiasi) 2° PROBLEMA A) Dati: A (ϕa, λ a), B (ϕb, λ b) Converto ∆λ°ab→∆λ'ab e ∆ϕ°ab→∆ϕ'ab Primo nome r v→∆ϕ
Secondo nome rv→∆λ
Calcolo: tg r v = ab
mab
ϕϕλ
∆∆ cos
Calcolo: ∆ϕ'ab = m cos rv
Calcolo: ϕb = ϕa +∆ϕab Calcolo: ϕm = 2
ba ϕϕ +
Calcolo: ∆λ'ab = m sen rv sec ϕm
Calcolo: λb = λa +∆λab
Calcolo: ∆λab = λb - λa ; ∆ϕab = ϕb - ϕa .
Tav. Nautica n. 4 Calcolo: ∆ϕ'cab = ϕ'cb - ϕ'ca
Calcolo: tg r v = ab
ab
c'
'
ϕ
λ
∆
∆
Calcolo: mab= |∆ϕ' | sec rv
Calcolo: mab= |∆ϕ' | sec rv
∆a ∆a-90°
C
A
B M
s r
Nave
A
B
90°-∆a
C
M
s r
∆a
Nave
5
1° PROBLEMA B) Dati: A (ϕa, λ a), mab = v ∆tab , Rvab Calcolo ϕb come nel problema precedente. Dunque :
Il suo segno è determinato dal secondo nome di rab ; calcolo λb come nel problema precedente.
NAVIGAZIONE PER MERIDIANO
A) Dati: A (ϕa, λ a), B (ϕb, λ b) con λ b=λ a , trovare mab ed Rab. Si ha La rotta R ab = 0° se ∆ϕab > 0 ; Rab = 180° se ∆ϕab < 0 . B) Dati: A (ϕa, λ a), mab , Rcab = 0°- 180° trovare B (ϕb, λ b) . Si ha con ∆ϕ'ab > 0 se Rab = 0° ; ∆ϕ'ab < 0 se Rab = 180°. Converto ∆ϕ'ab →∆ϕ° ' '' e dunque ϕb = ϕa +∆ϕab con λ b=λ a .
NAVIGAZIONE PER PARALLELO
A) Dati: A (ϕa, λ a), B (ϕb, λ b) con ϕ b=ϕ a , trovare mab ed Rv. Calcolo ∆λ'ab espressa in primi. Rv = 90° ; Rv = 270°. Con ϕ = ϕb = ϕa B) Dati: A (ϕa, λ a), mab , Rvab = 90°- 270°, trovare B (ϕb, λ b) . In essa ϕ = ϕb = ϕa . Rv = 90°; Rv = 270°. Infine converto ∆λ'ab →∆λ° ' '' e calcolo λb = λa +∆λab .
INCONTRO DELLA LOSSODROMIA CON UN DATO MERIDIANO
Dati: A (ϕa, λ a), B (ϕb, λ b), si suppone calcolata rv . Si vogliono determinare le coordinate del punto K (ϕk, λ k) di intersezione della lossodromia AB con il meridiano di longitudine K. Il problema si riduce alla determinazione della latitudine ϕk . Si calcola ∆λak = λk -λa e converto ∆λ ak° ' ''→ ∆λ'ak . Il segno di ∆ϕc'ak dipende dal primo nome di rv . Calcolo ϕ'ck = ϕ'ca + ∆ϕ'cak . Infine converto ϕ'ck → ϕk ° ' '' (Tav. Naut. 4).
INCONTRO DELLA LOSSODROMIA CON UN DATO PARALLELO
Dati: A (ϕa, λ a), B (ϕb, λ b) si suppone calcolata rv . Si vogliono determinare le coordinate del punto K (ϕk, λ k) di intersezione della lossodromia AB con il parallelo di latitudine K. Il problema si riduce alla determinazione della longitudine λk . Si calcola ∆ϕ'cak = ϕ'ck - ϕ'ca ( tav. naut. 4 ) . Il segno di ∆λ'ak dipende dal secondo nome di rv . Converto ∆λ'ak → ∆λak ° ' '' e calcolo λk = λa+∆λak .
INCONTRO DELLA LOSSODROMIA CON L 'EQUATORE
In particolare nell'incontro della lossodromia con l'equatore, nel nodo N (ϕn = 0°, λ n), la formula precedente si risolve così :
Tav. Nautica n. 4 Calcolo: ∆ϕ'cab = ϕ'cb - ϕ'ca
Calcolo: ∆λ'ab = ∆ϕ'cab tg rab
ma b = |∆ϕ'ab|
|∆ϕ'ab| = ma b
Calcolo: mab= |∆λ'ab| cos ϕ
Calcolo: |∆λ'ab| = mab sec ϕ
Calcolo: ∆ϕ'cak = |∆λ'ak| ctg rv
Calcolo: ∆λ'ak = |∆ϕc'ak| tg rv
Calcolo: ∆λ'an = |ϕc'a| tg rv
6
NAVIGAZIONE ORTODROMICA
CALCOLO DI Ri E doab
Dati: A (ϕa, λ a), B (ϕb, λ b) Posto: cos doab = M + N, valgono le regole dei segni : M > 0 ↔ ϕa e ϕb omonimi N > 0 ↔ ∆λab< 90° M < 0 ↔ ϕa e ϕb eteronomi N < 0 ↔ ∆λab> 90° Dunque se M + N > 0 → cos doab = arccosM + N Se, invece, M + N < 0 → cos doab = 180° - arccos M + N. Converto doab° ' ''→doab'.
Posto: ctg Ri = M - N, valgono le stesse regole dei segni usate nel calcolo di cos doab. Si trova, dunque, M - N > 0 → ctg Ri = arcctg M - N Se, invece, M - N < 0 → ctg Ri = 180° - arcctg M - N. La Ri così determinata è semicircolare ed ha per primo nome (N o S) quello di ϕa e per secondo nome (E o W) quello di ∆λab .
CALCOLO DELLE COORDINATE DEI VERTICI Le coordinate del primo vertice V1 che si incontra navigando da A verso B si trovano come segue: ϕv1 è omonimo a ϕa se Ri < 90°; ϕv1 = è eteronimo a ϕa se Ri > 90° ∆λav1 > 90° ↔ Ri > 90° ∆λav1 < 90° ↔ Ri < 90° Il segno di ∆λav1 è sempre uguale al segno di ∆λab . Si trova poi λv1 = λa +∆λav1 . Le coordinate dell'altro vertice (agli antipodi) V2 si trovano facilmente: ϕv2 = ϕv1 ma di nome contrario; λv2 = λv1 ± 180° (+ se λv1 = W / - se λv1 = E).
INTERSEZIONE DELL 'ORTODROMIA CON UN DATO MERIDIANO
È data un'ortodromia A (ϕa, λ a), B (ϕb, λ b) per la quale si è calcolata Ri. Si vogliono trovare le coordinate del punto d'intersezione della stessa con il meridiano di longitudine λ k . Indicata con ϕk la latitudine del punto d'intersezione si ha ∆λak = λk -λa
e dunque
Posto: tg ϕk = M + N si ha M > 0 ↔ ∆λak < 90° ; N > 0 ↔ Ri < 90° M < 0 ↔ ∆λak > 90° ; N < 0 ↔ Ri > 90° ϕk = arcctg M + N ; infine ϕk è omonimo o eteronomo di ϕa a seconda che M + N > 0 o che M + N < 0 .
INTERSEZIONE DELL 'ORTODROMIA CON UN DATO PARALLELLO Data un'ortodromia A (ϕa, λ a), B (ϕb, λ b). Si suppongono note le coordinate V (ϕv, λv) del vertice. Si vuole trovare la longitudine λ k del punto d'intersezione dell'ortodromia con il parallelo di latitudine ϕ k , quindi:
Sarà facile trovare λk = λv1 - ∆λkv1. ∆λkv1 ha segno di ∆λab e va presa > 90° o < 90° a seconda che ϕv1 e ϕk siano eteronime od omonime.
PUNTO SU UN'ORTODROMIA DI ROTTA Ri A DISTANZA mo
Sono dati un punto A (ϕa, λ a), una rotta iniziale Ri e una distanza ortodromica mo . Si vuole calcolare le coordinate del punto Ps (ϕs, λ s) (secondo problema dell'ortodromia) .
Posto: sen ϕb = M + N si ha M > 0 ↔ doab < 90° N > 0 ↔ Ri < 90° M < 0 ↔ doab > 90° N < 0 ↔ Ri > 90° ϕb = arcsen M + N ; infine ϕb è omonimo o eteronomo di ϕa a seconda che M + N > 0 o che M + N < 0 .
Calcolo: cos doab = sen ϕa sen ϕb + cos ϕa cos ϕb cos ∆λab
Calcolo: ctg Ri = tg ϕb cos ϕa cosec ∆λab - sen ϕa ctg ∆λab
Calcolo: cos ϕv1= cos ϕa senRi
Calcolo: ctg ∆λav1 = sen ϕa tg Ri
Calcolo: tg ϕk = cos ∆λak tg ϕa + sen ∆λak sec ϕa ctg Ri
Calcolo: ctg ∆λkv1 = cos ϕv1 tg ϕk
Calcolo: sen ϕs = sen ϕa cos mo + cos ϕa sen mo cos Ri
Calcolo: ctg ∆λs = ctg mo cos ϕa cosec Ri - sen ϕa ctg Ri
7
Posto: ctg ∆λs = M - N si ha M > 0 ↔ m o < 90°; N > 0 ↔ Ri < 90° M < 0 ↔ m o > 90°; N < 0 ↔ Ri > 90° ∆λs = arcctg M - N se M - N > 0 ∆λs = 180° - arcctg M - N se M - N < 0 Il segno di ∆λs è dato dal secondo nome della rotta iniziale Ri. Infine λb = λa + ∆λab .
INTERSEZIONE DELL 'ORTODROMIA CON L 'EQUATORE
Per calcolare la distanza ortodromica tra il punto di partenza A (ϕa ,λ a) e il nodo N (ϕn , λ n), nota Riab si usa la formula:
doan < 90° se Ri > 90° ; doan > 90° se Ri < 90° . Per calcolare la longitudine λ n , si usa la formula ∆λan > 90° se Ri < 90° ; ∆λan < 90° se Ri > 90° . ∆λan ha segno uguale a ∆λab . Infine λn = λa - ∆λan . La longitudine dell'altro nodo è data λn' = λn ± 180°. Ovviamente ϕn = ϕn' = 0°. Per calcolare l'inclinazione dell'ortodromia sull'equatore si usa la formula:
RELAZIONE TRA λn (NODO) e λv (VERTICE )
Nota la longitudine del vertice V1 , λv1 , si ha:
NAVIGAZIONE MISTA
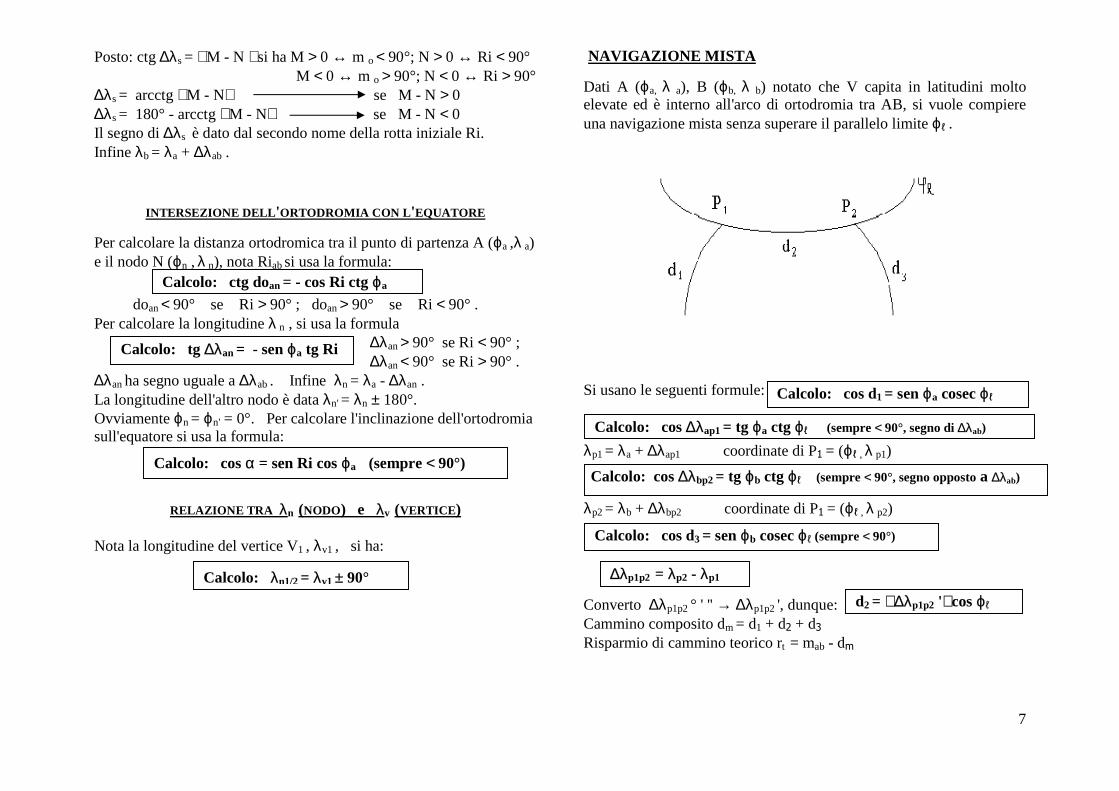
Dati A (ϕa, λ a), B (ϕb, λ b) notato che V capita in latitudini molto elevate ed è interno all'arco di ortodromia tra AB, si vuole compiere una navigazione mista senza superare il parallelo limite ϕℓ .
Si usano le seguenti formule: λp1 = λa + ∆λap1 coordinate di P1 = (ϕℓ , λ p1) λp2 = λb + ∆λbp2 coordinate di P1 = (ϕℓ , λ p2) Converto ∆λp1p2 ° ' '' → ∆λp1p2 ', dunque: Cammino composito dm = d1 + d2 + d3 Risparmio di cammino teorico rt = mab - dm
Calcolo: cos d1 = sen ϕa cosec ϕℓ
Calcolo: cos ∆λap1 = tg ϕa ctg ϕℓ (sempre < 90°, segno di ∆λab)
Calcolo: cos ∆λbp2 = tg ϕb ctg ϕℓ (sempre < 90°, segno opposto a ∆λab)
Calcolo: cos d3 = sen ϕb cosec ϕℓ (sempre < 90°)
d2 = ∆λp1p2 'cos ϕℓ
∆λp1p2 = λp2 - λp1
Calcolo: ctg doan = - cos Ri ctg ϕa
Calcolo: tg ∆λan = - sen ϕa tg Ri
Calcolo: cos α = sen Ri cos ϕa (sempre < 90°)
Calcolo: λn1/2 = λv1 ± 90°
8
METODI PER CONDURRE UNA NAVIGAZIONE ORTODROMICA:
Nei casi seguenti si navigherà sul circolo massimo attraverso una poligonale lossodromia inscritta al C.M.: 1) PUNTI EQUIDISTANTI DI ∆ϕ Indicato con n il numero di suddivisioni del ∆ϕ tra il punto di partenza A e quello di arrivo B, la latitudine dei vari punti equidistanti di ∆ϕ si avrà dalla formula:
nkAK
ϕϕϕ ∆⋅+= dove k=1,2…..(n-1).
La longitudine dei vari punti si ricaverà applicando il teorema di Nepero ai successivi triangoli sferici rettangoli costruiti con il vertice dell’ortodromia:
VKKV gtg ϕϕλλ cot)cos( ⋅=−
2) PUNTI EQUIDISTANTI DI ∆λ Indicato con n il numero di suddivisioni del ∆λ tra il punto di partenza A e quello di arrivo B, la longitudine dei vari punti equidistanti di ∆λ si avrà dalla formula:
nkAK
λλλ ∆⋅+= dove k=1,2…..(n-1).
La latitudine dei vari punti si ricaverà applicando il teorema di Nepero ai successivi triangoli sferici rettangoli costruiti con il vertice dell’ortodromia:
VKVK tgtg ϕλλϕ ⋅−= )cos(
3) METODO DELLA ROTTA INIZIALE Si considera la Rotta iniziale tra il punto A e quello B come una rotta lossodromica; si calcoleranno le coordinate di un punto dopo un prefissato cammino. Successivamente si calcolerà la rotta ortodromica tra questo punto e il punto B e la si considererà sempre come rotta lossodromica. Da cui ripeterà l’operazione di assumere le rotte ortodromiche come rotte lossodromiche fino a quando non si arriverà nel punto B.
ASTRONOMIA NAUTICA ( applicazioni trigonometriche)
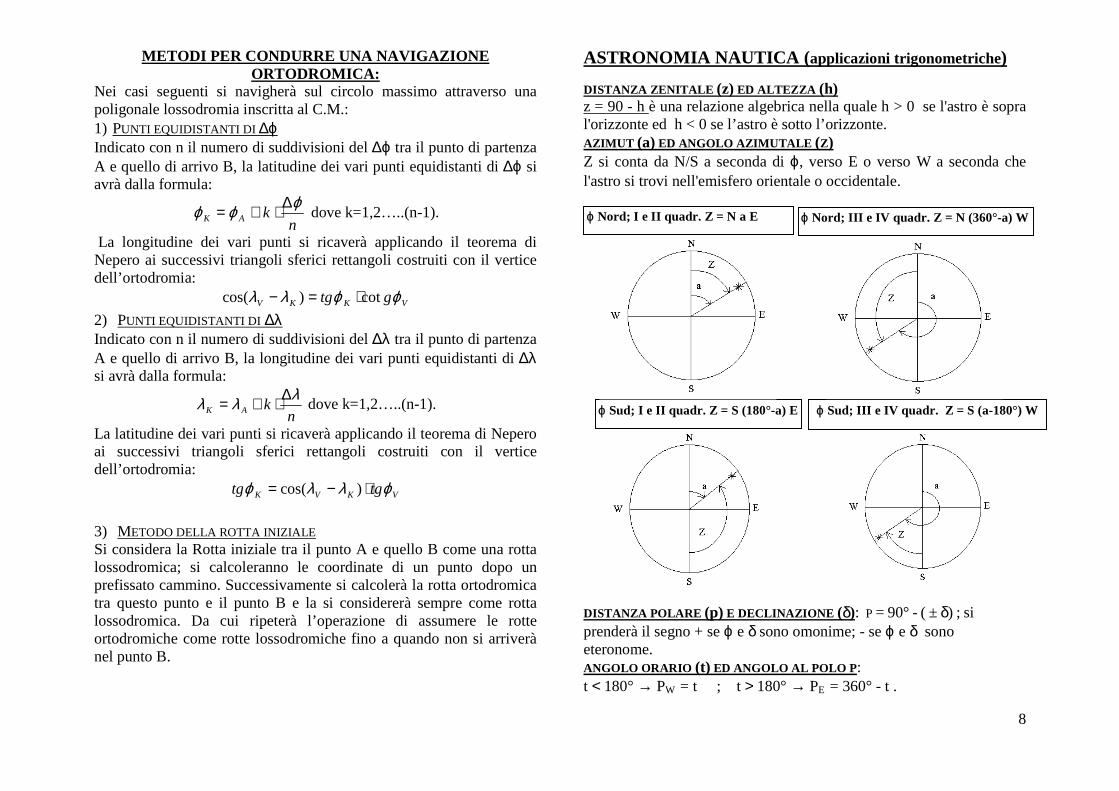
DISTANZA ZENITALE (z) ED ALTEZZA (h) z = 90 - h è una relazione algebrica nella quale h > 0 se l'astro è sopra l'orizzonte ed h < 0 se l’astro è sotto l’orizzonte. AZIMUT (a) ED ANGOLO AZIMUTALE (Z) Z si conta da N/S a seconda di ϕ, verso E o verso W a seconda che l'astro si trovi nell'emisfero orientale o occidentale. DISTANZA POLARE (p) E DECLINAZIONE (δ): P = 90° - ( ± δ) ; si prenderà il segno + se ϕ e δ sono omonime; - se ϕ e δ sono eteronome. ANGOLO ORARIO (t) ED ANGOLO AL POLO P : t < 180° → PW = t ; t > 180° → PE = 360° - t .
ϕ Sud; I e II quadr. Z = S (180°-a) E
ϕ Sud; III e IV quadr. Z = S (a-180°) W
ϕ Nord; I e II quadr. Z = N a E
ϕ Nord; III e IV quadr. Z = N (360°-a) W

9
TRASFORMAZIONE DI COORDINATE LOCALI ORARIE IN LOCALI ALTAZIMUTALI :
Dati : (δ, ϕ, P ⇔ t) devo trovare: h,Z)
⇔ a. Per cui:
Posto: sen h = M + N si ha M + ↔ ϕ e δ omonimi (∗) M - ↔ ϕ e δ eteronomi N + ↔ P
)< 90°
N - ↔ P)
>90° Infine h = arcos |M+N| con h + se (M + N) è + h – se (M + N) è - Ancora:
Posto ctgZ)
=M – Nsi hanno per M ed N le stesse regole dei segni (∗). Infine: Z
)= arcctg M - N se M - N + ;
e Z)
= 180° - arcctg M - N se M - N - . Il primo nome di Z
) è omonimo a ϕ; il secondo è E o W a seconda
che P)
è di tipo E o W.
TRASFORMAZIONE DI COORDINATE LOCALI ALTAZIMUTALI IN LOCALI ORARIE
Dati ( h, ϕ ; Z ⇔ a ) devo trovare ( δ, P)
)
Posto sen δ = M + N si ha M > 0 ↔ h > 0 (∗) M < 0 ↔ h < 0 N > 0 ↔ Z < 90° N < 0 ↔ Z >90° Infine δ = arcos |M+N| con δ omonima a ϕ se M + N > 0 δ eteronima a ϕ se M + N < 0
PROBLEMA DEI TEMPI Posto: ctgP
) = M – N
valgono le regole dei segni: M > 0 ↔ h > 0 P)
è P)
E o P)
W M < 0 ↔ h < 0 a seconda del N > 0 ↔ Z < 90° secondo nome di Z
).
N < 0 ↔ Z >90° Infine: P
) = arcctg M - N se M - N > 0;
P)
= 180° - arcctg M - N se M - N < 0 .
PASSAGGIO AL PRIMO VERTICALE
Al passaggio al primo verticale l'altezza è : La formula ha risoluzione se δ ≤ ϕ (condizione di passaggio al primo verticale). L'angolo al polo è: . In queste formule: se ϕ e δ sono omonime h > 0 e P
)< 90°.
se ϕ e δ sono eteronime h < 0 e P)
> 90°. Infine P
) è di tipo E al passaggio al primo verticale orientale e di tipo
W al passaggio al primo verticale occidentale.
ASTRO AL SORGERE E TRAMONTO VERO L'angolo al polo al sorgere vero è dato da: Se ϕ e δ sono omonime P > 90°. Se ϕ e δ sono eteronime P < 90°. Inoltre P
) è di tipo E al sorgere e di tipo W al tramonto.
L’angolo azimutale è dato dalla formula: In tale formula se ϕ e δ sono omonime Z < 90° ; se ϕ e δ sono eteronime Z > 90° . Il primo nome di Z è determinato da ϕ , il secondo è E per il sorgere, W per il tramonto. In luogo dell’angolo azimutale al sorgere o tramonto si può calcolare l’amplitudine:
Amp è sempre < 90° con primo nome E per il sorgere (amplitudine ortiva) ed W per il tramonto (amplitudine occasa); il secondo nome
sen h = sen δ / sen ϕ
cos P)
= ctg ϕ tg δ
cos P)
= - tg ϕ tg δ
sen Amp = sen δ / cos ϕ
cos Z = sen δ / cos ϕ
Calcolo: sen h = sen ϕ sen δ + cos ϕ cos δ cos P)
Calcolo: ctgZ)
= tg δ cos ϕ cosec P)
– sen ϕ ctg P)
)
Calcolo: sen δ = sen ϕ sen h + cos ϕ cos h cos Z)
Calcolo: ctg P)
= tg h cos ϕ cosec Z)
– sen ϕ ctg Z)
10
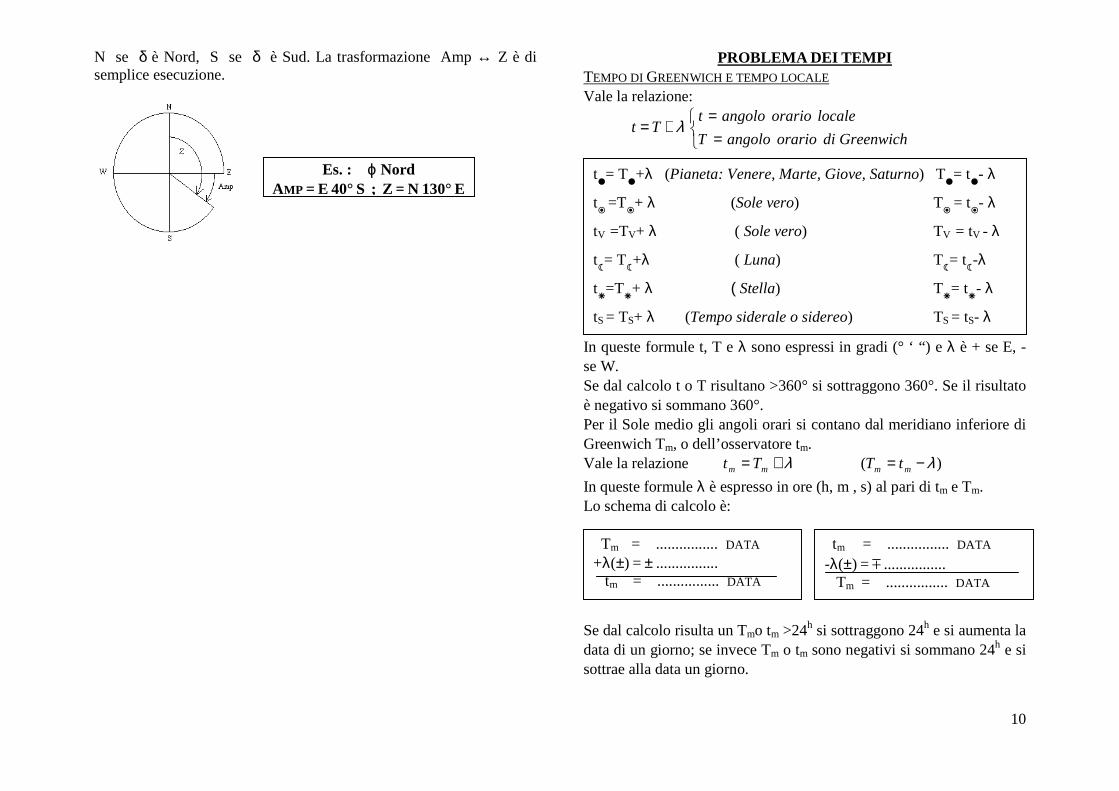
N se δ è Nord, S se δ è Sud. La trasformazione Amp ↔ Z è di semplice esecuzione.
PROBLEMA DEI TEMPI TEMPO DI GREENWICH E TEMPO LOCALE Vale la relazione:
λ+= Tt
==
GreenwichdiorarioangoloT
localeorarioangolot
In queste formule t, T e λ sono espressi in gradi (° ‘ “) e λ è + se E, - se W. Se dal calcolo t o T risultano >360° si sottraggono 360°. Se il risultato è negativo si sommano 360°. Per il Sole medio gli angoli orari si contano dal meridiano inferiore di Greenwich Tm, o dell’osservatore tm. Vale la relazione λ+= mm Tt )( λ−= mm tT
In queste formule λ è espresso in ore (h, m , s) al pari di tm e Tm. Lo schema di calcolo è:
Se dal calcolo risulta un Tmo tm >24h si sottraggono 24h e si aumenta la data di un giorno; se invece Tm o tm sono negativi si sommano 24h e si sottrae alla data un giorno.
Es. : ϕ Nord AMP = E 40° S ; Z = N 130° E
t= T
+λ (Pianeta: Venere, Marte, Giove, Saturno) T
= t
- λ
t
=T+ λ (Sole vero) T
= t
- λ
tV =TV+ λ ( Sole vero) TV = tV - λ
t= T
+λ ( Luna) T
= t
-λ
t=T
+ λ ( Stella) T
= t
- λ
tS = TS+ λ (Tempo siderale o sidereo) TS = tS- λ
Tm = ................ DATA +λ(±) = ± ................ tm = ................ DATA
tm = ................ DATA -λ(±) = m ................ Tm = ................ DATA
11
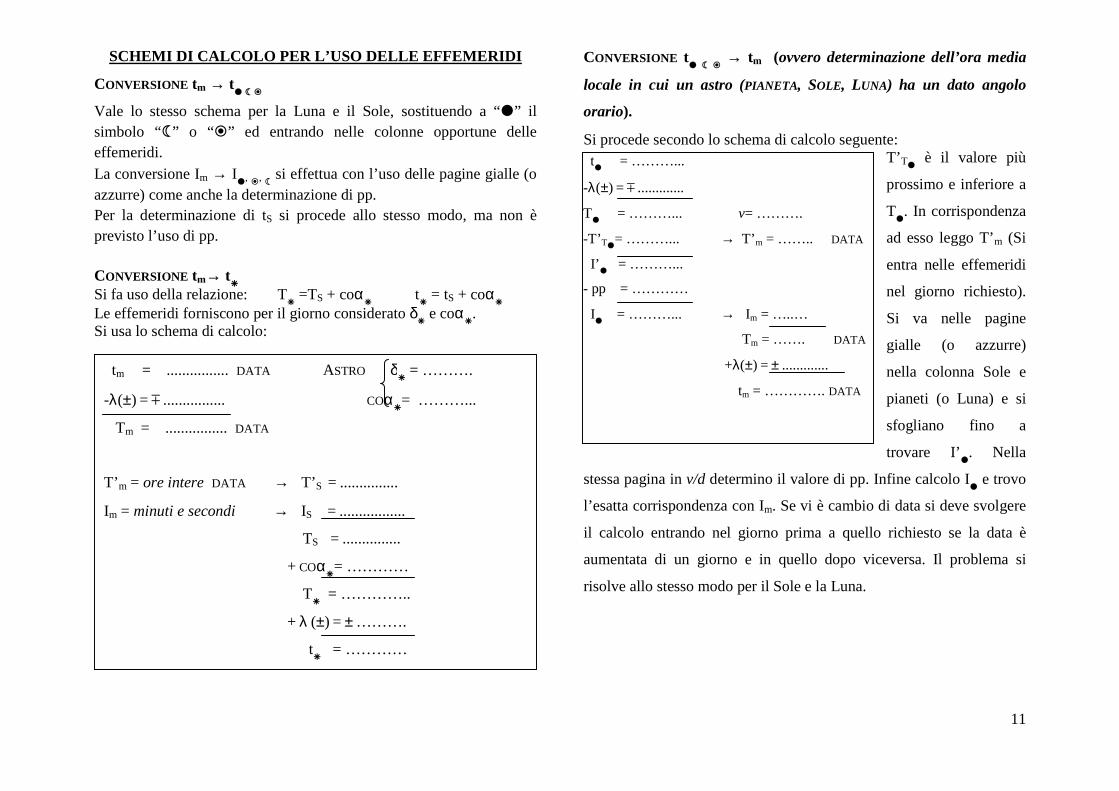
SCHEMI DI CALCOLO PER L’USO DELLE EFFEMERIDI
CONVERSIONE tm → t
Vale lo stesso schema per la Luna e il Sole, sostituendo a “” il simbolo “” o “” ed entrando nelle colonne opportune delle effemeridi. La conversione Im → I
,
, si effettua con l’uso delle pagine gialle (o
azzurre) come anche la determinazione di pp. Per la determinazione di tS si procede allo stesso modo, ma non è previsto l’uso di pp. CONVERSIONE tm→ t
Si fa uso della relazione: T =TS + coα
t
= tS + coα
Le effemeridi forniscono per il giorno considerato δ e coα
.
Si usa lo schema di calcolo:
CONVERSIONE t
→ tm (ovvero determinazione dell’ora media
locale in cui un astro (PIANETA, SOLE, LUNA) ha un dato angolo
orario).
Si procede secondo lo schema di calcolo seguente: T’ T
è il valore più
prossimo e inferiore a
T. In corrispondenza
ad esso leggo T’m (Si
entra nelle effemeridi
nel giorno richiesto).
Si va nelle pagine
gialle (o azzurre)
nella colonna Sole e
pianeti (o Luna) e si
sfogliano fino a
trovare I’. Nella
stessa pagina in v/d determino il valore di pp. Infine calcolo I e trovo
l’esatta corrispondenza con Im. Se vi è cambio di data si deve svolgere
il calcolo entrando nel giorno prima a quello richiesto se la data è
aumentata di un giorno e in quello dopo viceversa. Il problema si
risolve allo stesso modo per il Sole e la Luna.
tm = ................ DATA ASTRO δ = ……….
-λ(±) = m ................ COα= ………...
Tm = ................ DATA
T’ m = ore intere DATA → T’S = ...............
Im = minuti e secondi → IS = .................
TS = ...............
+ COα= …………
T = …………..
+ λ (±) = ± ……….
t
= …………
t = ………...
-λ(±) = m .............
T = ………... v= ……….
-T’T= ………... → T’m = …….. DATA
I’ = ………...
- pp = …………
I = ………... → Im = …..…
Tm = ……. DATA
+λ(±) = ± .............
tm = …………. DATA
12
ORA DEL PASSAGGIO AD UN ORARIO PARTICOLARE : a) Ora del passaggio al meridiano superiore: si effettua la conversione
t
,
,
,S,= 0° - 360° → tm
b) Ora del passaggio al meridiano inferiore: si effettua la conversione t
,
,
,S,= 180° → tm
c) Ora del passaggio al primo orario orientale: si effettua la conversione t
,
,
,S,= 270° → tm
d) Ora del passaggio al primo orario occidentale: si effettua la
conversione t
,
,
,S,= 90° → tm
ORA DEL PASSAGGIO AL PRIMO VERTICALE E O W Si calcola l’angolo al polo al passaggio al primo verticale dati ϕ e δ (vedi pag. 18) e dopo averlo trasformato in angolo orario si converte in tm. ORA DEL SORGERE E TRAMONTO VERI . Si calcola l’angolo al polo al tramonto o sorgere vero (vedi pag. 18) e dopo averlo trasformato in angolo orario si converte in tm. RELAZIONE TRA ORA DI GREENWICH (Tm) E ORA LEGALE (tf). Vale la seguente : fmf Tt λ+=
λf è la longitudine trasformata in ore, minuti e secondi e approssimata all’ora intera più prossima. Schema di calcolo:
DALL ’ORA tf O tm DI PARTENZA A tf O tm DI ARRIVO . Si passa sempre per il Tm evitando i problemi connessi al cambio di orario al passaggio di fuso. In questo schema il pedice “p” si riferisce all’ora di partenza o alla longitudine di partenza, e il pedice “a” si riferisce all’arrivo. Se invece di
tmp è data l’ora legale tfp, si userà la relazione mpfpfp Tt =− λ . Se si vuole
calcolare l’ora legale di arrivo si usa la relazione fafama tT =+ λ e lo schema di
calcolo è il seguente:
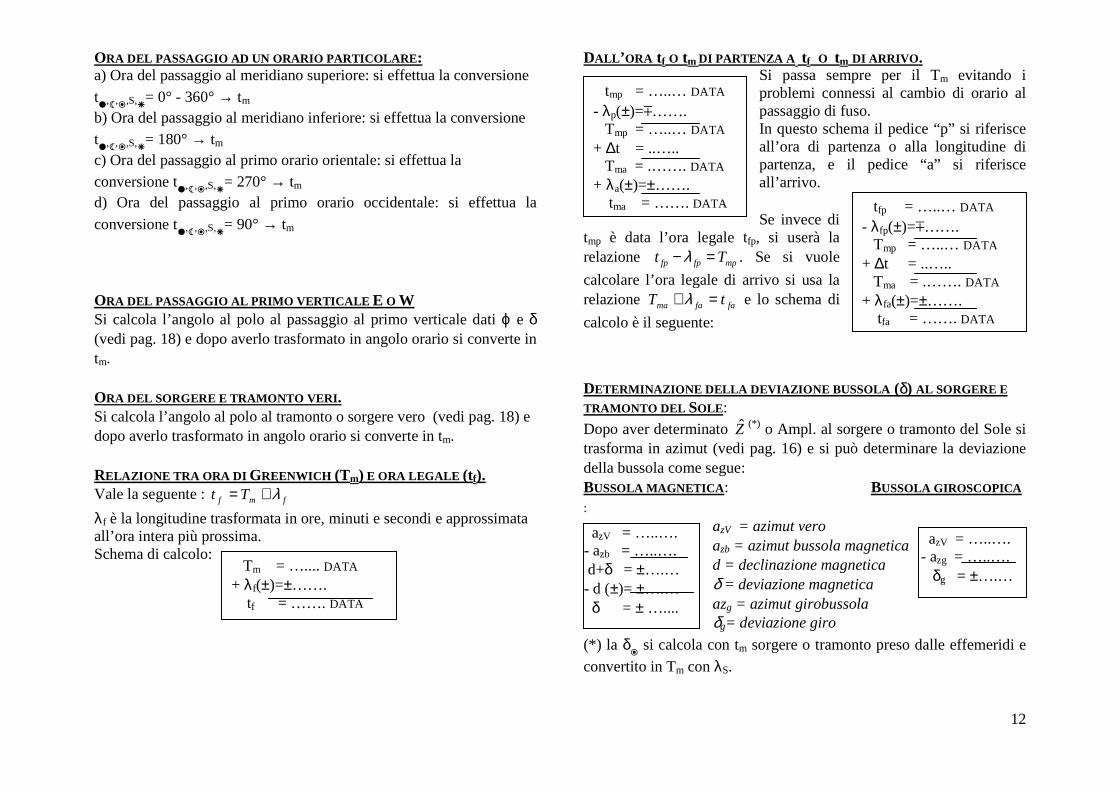
DETERMINAZIONE DELLA DEVIAZIONE BUSSOLA (δ) AL SORGERE E
TRAMONTO DEL SOLE : Dopo aver determinato Z (*) o Ampl. al sorgere o tramonto del Sole si trasforma in azimut (vedi pag. 16) e si può determinare la deviazione della bussola come segue: BUSSOLA MAGNETICA : BUSSOLA GIROSCOPICA
:
azV = azimut vero azb = azimut bussola magnetica d = declinazione magnetica δ = deviazione magnetica azg = azimut girobussola δg= deviazione giro
(*) la δ si calcola con tm sorgere o tramonto preso dalle effemeridi e
convertito in Tm con λS.
Tm = ….... DATA + λf(±)=±……. tf = ……. DATA
tmp = …..… DATA - λp(±)=m……. Tmp = …..… DATA + ∆t = ..….. Tma = .……. DATA + λa(±)=±……. tma = ……. DATA tfp = …..… DATA
- λfp(±)=m……. Tmp = …..… DATA + ∆t = ..….. Tma = .……. DATA + λfa(±)=±……. tfa = ……. DATA
azV = …..…. - azb = …..…. d+δ = ±….… - d (±)= ±….… δ = ± …....
azV = …..…. - azg = …..…. δg = ±….…
13
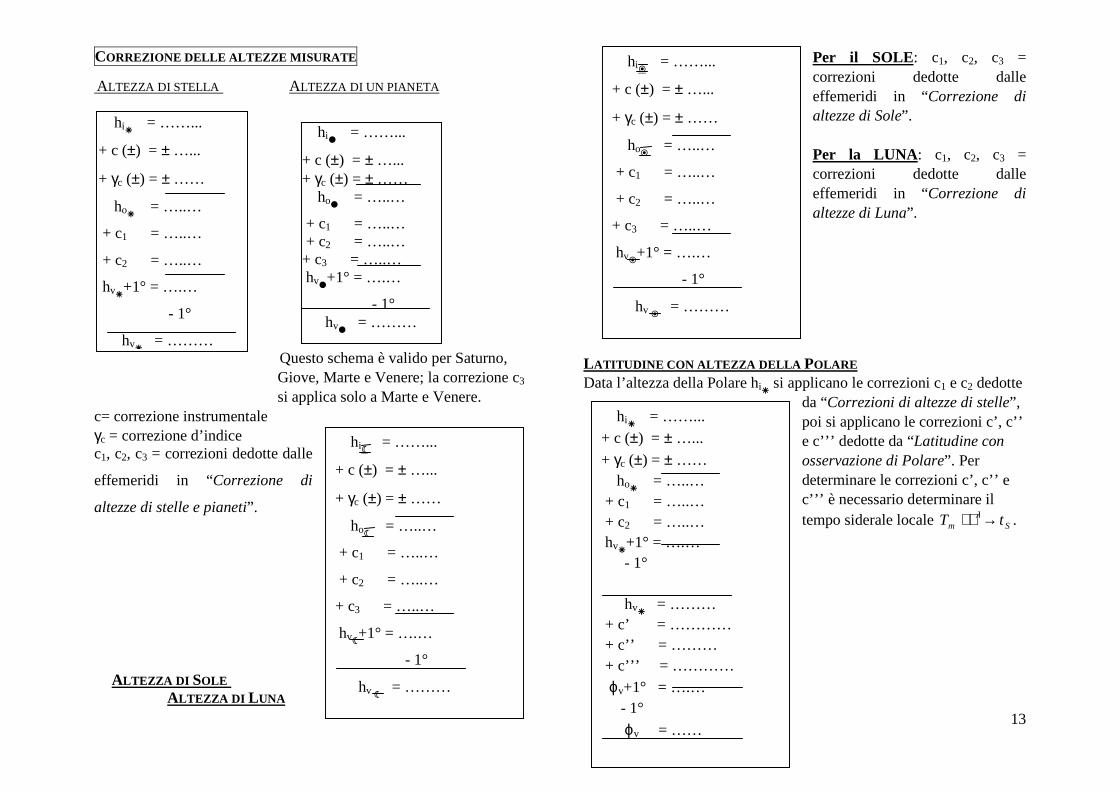
CORREZIONE DELLE ALTEZZE MISURATE
ALTEZZA DI STELLA ALTEZZA DI UN PIANETA Questo schema è valido per Saturno,
Giove, Marte e Venere; la correzione c3 si applica solo a Marte e Venere.
c= correzione instrumentale γc = correzione d’indice c1, c2, c3 = correzioni dedotte dalle
effemeridi in “Correzione di
altezze di stelle e pianeti”.
ALTEZZA DI SOLE ALTEZZA DI LUNA
Per il SOLE: c1, c2, c3 = correzioni dedotte dalle effemeridi in “Correzione di altezze di Sole”. Per la LUNA: c1, c2, c3 = correzioni dedotte dalle effemeridi in “Correzione di altezze di Luna”.
LATITUDINE CON ALTEZZA DELLA POLARE Data l’altezza della Polare hi
si applicano le correzioni c1 e c2 dedotte
da “Correzioni di altezze di stelle”, poi si applicano le correzioni c’, c’’ e c’’’ dedotte da “Latitudine con osservazione di Polare”. Per determinare le correzioni c’, c’’ e c’’’ è necessario determinare il tempo siderale locale Sm tT →λ .
hi
= ……...
+ c (±) = ± …...
+ γc (±) = ± ……
ho = …..…
+ c1 = …..…
+ c2 = …..…
hv+1° = ….…
- 1°
hv = ………
hi
= ……...
+ c (±) = ± …... + γc (±) = ± …… ho
= …..…
+ c1 = …..… + c2 = …..… + c3 = …..… hv
+1° = ….…
- 1° hv
= ………
hi
= ……...
+ c (±) = ± …...
+ γc (±) = ± ……
ho = …..…
+ c1 = …..…
+ c2 = …..…
+ c3 = …..…
hv+1° = ….…
- 1°
hv = ………
hi
= ……...
+ c (±) = ± …...
+ γc (±) = ± ……
ho = …..…
+ c1 = …..…
+ c2 = …..…
+ c3 = …..…
hv+1° = ….…
- 1°
hv = ………
hi
= ……...
+ c (±) = ± …...
+ γc (±) = ± …… ho
= …..…
+ c1 = …..… + c2 = …..… hv
+1° = ….…
- 1° hv
= ………
+ c’ = ………… + c’’ = ……… + c’’’ = ………… ϕv+1° = ….… - 1°
ϕv = ……
14
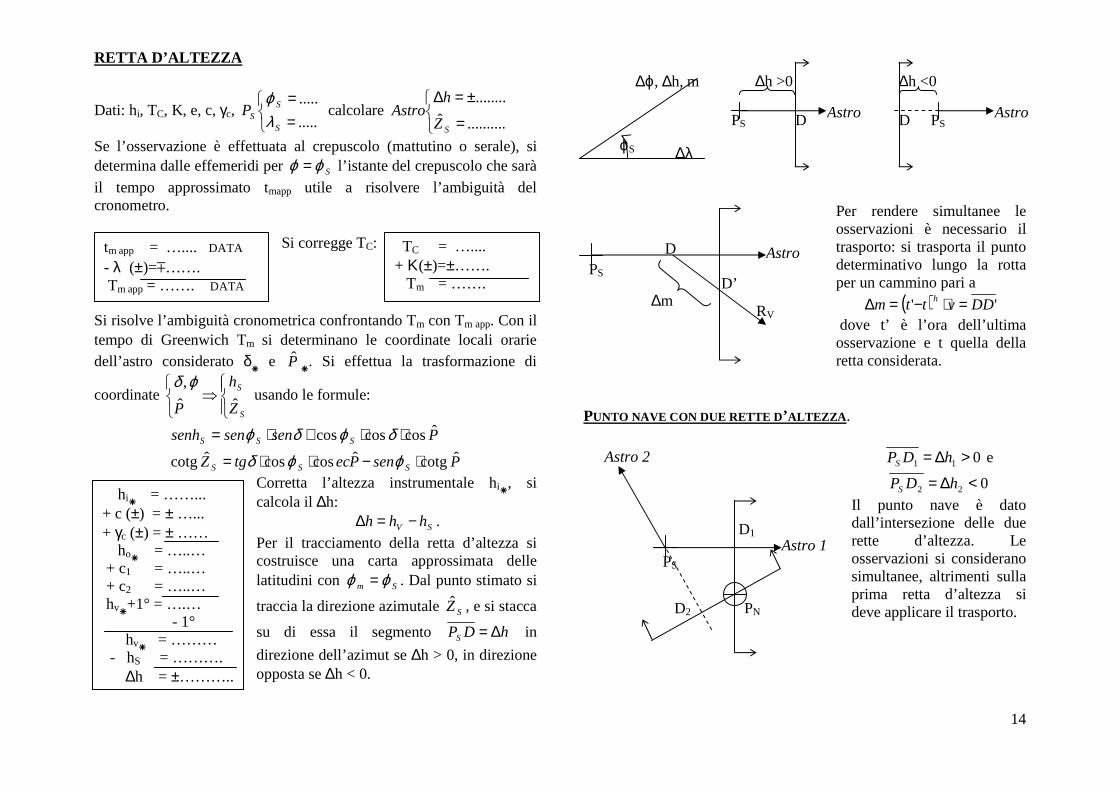
RETTA D’ALTEZZA
Dati: hi, TC, K, e, c, γc,
==
.....
.....
S
SSP
λϕ
calcolare
=
±=∆
..........ˆ
........
SZ
hAstro
Se l’osservazione è effettuata al crepuscolo (mattutino o serale), si determina dalle effemeridi per Sϕϕ = l’istante del crepuscolo che sarà
il tempo approssimato tmapp utile a risolvere l’ambiguità del cronometro.
Si corregge TC:
Si risolve l’ambiguità cronometrica confrontando Tm con Tm app. Con il tempo di Greenwich Tm si determinano le coordinate locali orarie dell’astro considerato δ
e P
. Si effettua la trasformazione di
coordinate
⇒
S
S
Z
h
P ˆˆ
,ϕδ usando le formule:
PsenPectgZ
Psensensenh
SSS
SSS
ˆcotgˆcoscosˆcotg
ˆcoscoscos
⋅−⋅⋅=
⋅⋅+⋅=
ϕϕδδϕδϕ
Corretta l’altezza instrumentale hi, si
calcola il ∆h:
SV hhh −=∆ .
Per il tracciamento della retta d’altezza si costruisce una carta approssimata delle latitudini con Sm ϕϕ = . Dal punto stimato si
traccia la direzione azimutale SZ , e si stacca
su di essa il segmento hDPS ∆= in
direzione dell’azimut se ∆h > 0, in direzione opposta se ∆h < 0.
Per rendere simultanee le osservazioni è necessario il trasporto: si trasporta il punto determinativo lungo la rotta per un cammino pari a
( ) '' DDvttm h =⋅−=∆ dove t’ è l’ora dell’ultima osservazione e t quella della retta considerata.
PUNTO NAVE CON DUE RETTE D ’ALTEZZA .
011 >∆= hDPS e
022 <∆= hDPS
Il punto nave è dato dall’intersezione delle due rette d’altezza. Le osservazioni si considerano simultanee, altrimenti sulla prima retta d’altezza si deve applicare il trasporto.
tm app = ….... DATA - λ (±)=m……. Tm app = ……. DATA
TC = ….... + Κ(±)=±……. Tm = …….
hi
= ……... + c (±) = ± …... + γc (±) = ± …… ho
= …..…
+ c1 = …..… + c2 = …..… hv
+1° = ….…
- 1° hv
= ………
- hS = ………. ∆h = ±………..
PS
D Astro
D’
RV ∆m
ϕS ∆λ
∆ϕ, ∆h, m ∆h >0
PS D Astro
∆h <0
PS D Astro
PN
PS
D1 Astro 1
D2
Astro 2
15
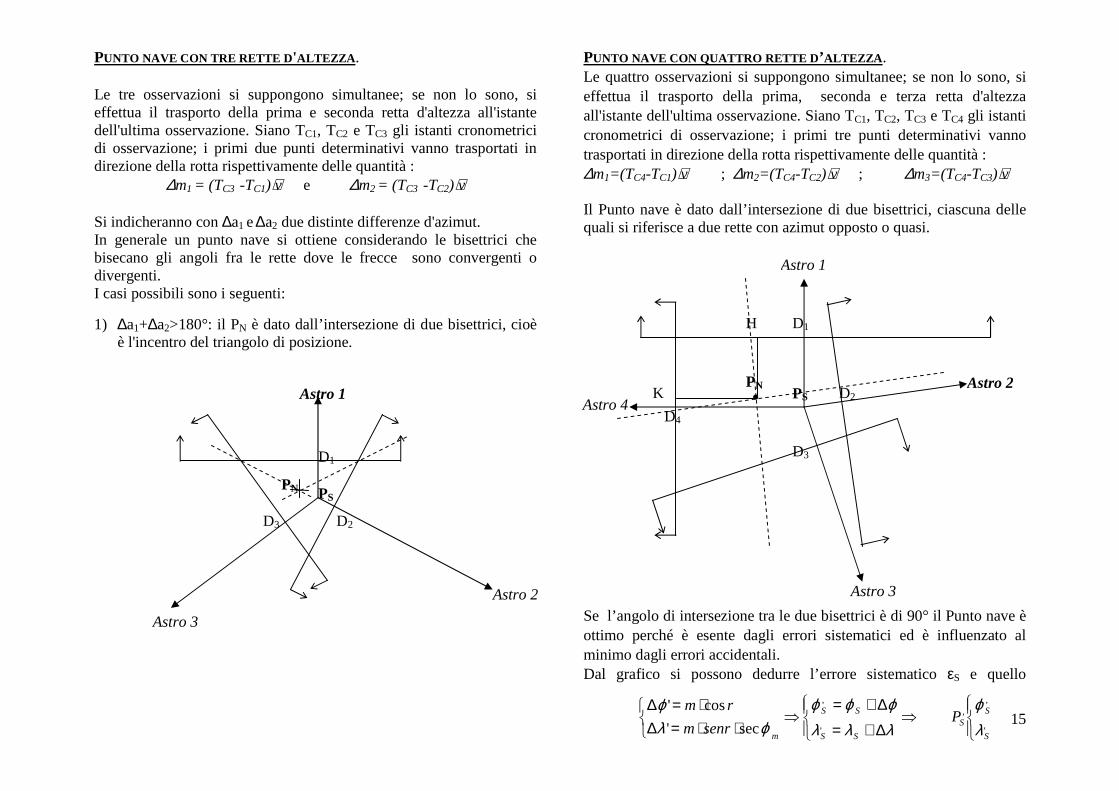
PUNTO NAVE CON TRE RETTE D 'ALTEZZA .
Le tre osservazioni si suppongono simultanee; se non lo sono, si effettua il trasporto della prima e seconda retta d'altezza all'istante dell'ultima osservazione. Siano TC1, TC2 e TC3 gli istanti cronometrici di osservazione; i primi due punti determinativi vanno trasportati in direzione della rotta rispettivamente delle quantità :
∆m1 = (TC3 -TC1)⋅v e ∆m2 = (TC3 -TC2)⋅v
Si indicheranno con ∆a1 e ∆a2 due distinte differenze d'azimut. In generale un punto nave si ottiene considerando le bisettrici che bisecano gli angoli fra le rette dove le frecce sono convergenti o divergenti. I casi possibili sono i seguenti:
1) ∆a1+∆a2>180°: il PN è dato dall’intersezione di due bisettrici, cioè è l'incentro del triangolo di posizione.
PUNTO NAVE CON QUATTRO RETTE D ’ALTEZZA . Le quattro osservazioni si suppongono simultanee; se non lo sono, si effettua il trasporto della prima, seconda e terza retta d'altezza all'istante dell'ultima osservazione. Siano TC1, TC2, TC3 e TC4 gli istanti cronometrici di osservazione; i primi tre punti determinativi vanno trasportati in direzione della rotta rispettivamente delle quantità : ∆m1=(TC4-TC1)⋅v ; ∆m2=(TC4-TC2)⋅v ; ∆m3=(TC4-TC3)⋅v
Il Punto nave è dato dall’intersezione di due bisettrici, ciascuna delle quali si riferisce a due rette con azimut opposto o quasi.
Se l’angolo di intersezione tra le due bisettrici è di 90° il Punto nave è ottimo perché è esente dagli errori sistematici ed è influenzato al minimo dagli errori accidentali. Dal grafico si possono dedurre l’errore sistematico εS e quello
Astro 1
Astro 2
Astro 3
PN PS
D1
D2 D3
PS PN
D2
D3
D1
D4
Astro 1
Astro 2
Astro 3
Astro 4
H
K
⇒
∆+=
∆+=⇒
⋅⋅=∆⋅=∆
,
,,
,
,
sec'
cos'
S
SS
SS
SS
m
Psenrm
rm
λϕ
λλλϕϕϕ
ϕλϕ
16
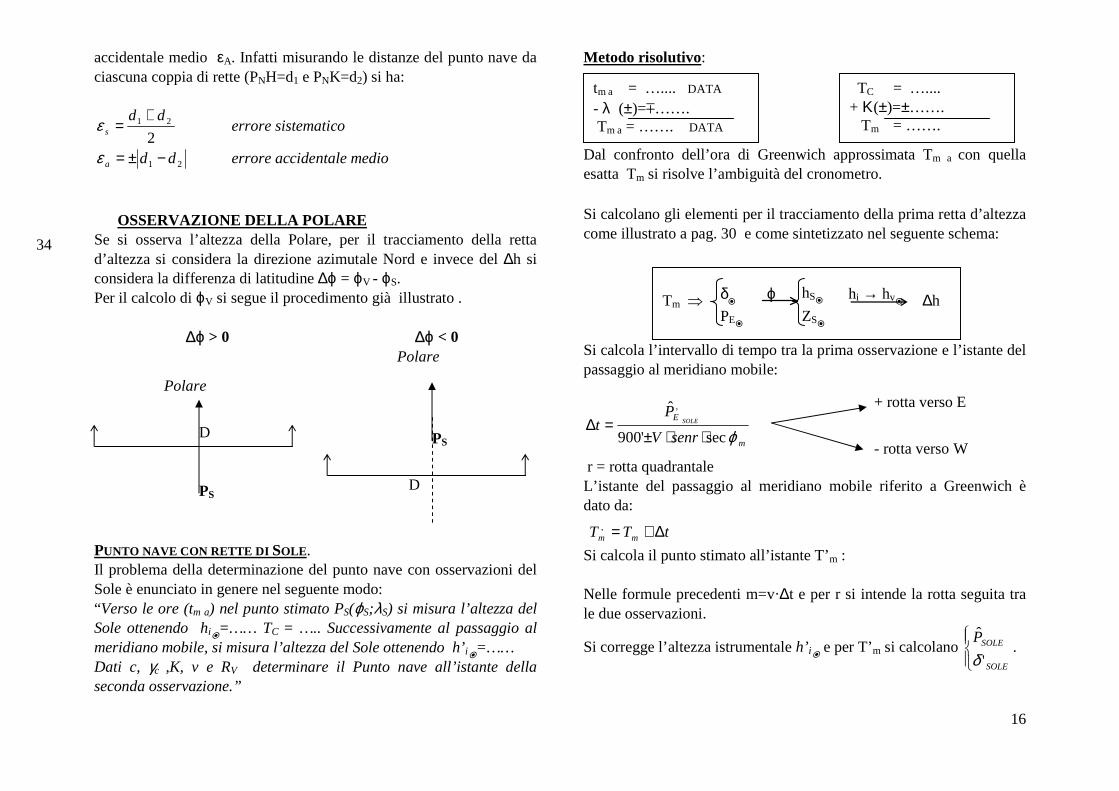
accidentale medio εA. Infatti misurando le distanze del punto nave da ciascuna coppia di rette (PNH=d1 e PNK=d2) si ha:
221 dd
s
+=ε errore sistematico
21 dda −±=ε errore accidentale medio
OSSERVAZIONE DELLA POLARE Se si osserva l’altezza della Polare, per il tracciamento della retta d’altezza si considera la direzione azimutale Nord e invece del ∆h si considera la differenza di latitudine ∆ϕ = ϕV - ϕS. Per il calcolo di ϕV si segue il procedimento già illustrato .
∆ϕ > 0 ∆ϕ < 0 PUNTO NAVE CON RETTE DI SOLE . Il problema della determinazione del punto nave con osservazioni del Sole è enunciato in genere nel seguente modo: “Verso le ore (tm a) nel punto stimato PS(ϕS;λS) si misura l’altezza del Sole ottenendo hi
=…… TC = ….. Successivamente al passaggio al
meridiano mobile, si misura l’altezza del Sole ottenendo h’i=……
Dati c, γc ,K, v e RV determinare il Punto nave all’istante della seconda osservazione.”
Metodo risolutivo:
Dal confronto dell’ora di Greenwich approssimata Tm a con quella esatta Tm si risolve l’ambiguità del cronometro. Si calcolano gli elementi per il tracciamento della prima retta d’altezza come illustrato a pag. 30 e come sintetizzato nel seguente schema: Si calcola l’intervallo di tempo tra la prima osservazione e l’istante del passaggio al meridiano mobile:
r = rotta quadrantale L’istante del passaggio al meridiano mobile riferito a Greenwich è dato da:
Si calcola il punto stimato all’istante T’m : Nelle formule precedenti m=v·∆t e per r si intende la rotta seguita tra le due osservazioni.
Si corregge l’altezza istrumentale h’ i e per T’m si calcolano
SOLE
SOLEP
'
ˆ
δ.
PS
D
Polare
Polare
PS
D
tm a = ….... DATA - λ (±)=m……. Tm a = ……. DATA
TC = ….... + Κ(±)=±……. Tm = …….
34
Tm ⇒ ∆h
PE
ϕ hS
ZS
hi → hv
δ
m
E
senrV
Pt SOLE
ϕsec'900
ˆ ,
⋅⋅±=∆
+ rotta verso E
- rotta verso W
tTT mm ∆+=,
17
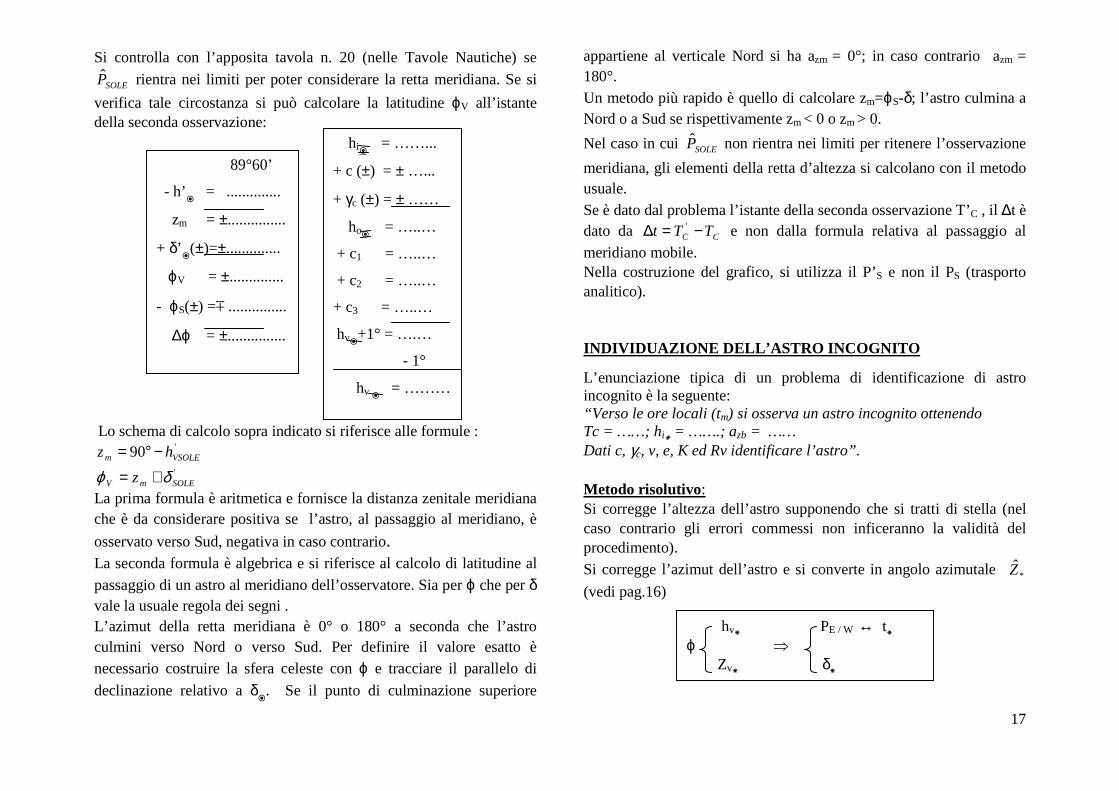
Si controlla con l’apposita tavola n. 20 (nelle Tavole Nautiche) se
SOLEP rientra nei limiti per poter considerare la retta meridiana. Se si
verifica tale circostanza si può calcolare la latitudine ϕV all’istante della seconda osservazione: Lo schema di calcolo sopra indicato si riferisce alle formule :
'
'90
SOLEmV
VSOLEm
z
hz
δϕ +=
−°=
La prima formula è aritmetica e fornisce la distanza zenitale meridiana che è da considerare positiva se l’astro, al passaggio al meridiano, è
osservato verso Sud, negativa in caso contrario. La seconda formula è algebrica e si riferisce al calcolo di latitudine al passaggio di un astro al meridiano dell’osservatore. Sia per ϕ che per δ vale la usuale regola dei segni . L’azimut della retta meridiana è 0° o 180° a seconda che l’astro culmini verso Nord o verso Sud. Per definire il valore esatto è necessario costruire la sfera celeste con ϕ e tracciare il parallelo di
declinazione relativo a δ. Se il punto di culminazione superiore
appartiene al verticale Nord si ha azm = 0°; in caso contrario azm = 180°. Un metodo più rapido è quello di calcolare zm=ϕS-δ; l’astro culmina a Nord o a Sud se rispettivamente zm < 0 o zm > 0.
Nel caso in cui SOLEP non rientra nei limiti per ritenere l’osservazione
meridiana, gli elementi della retta d’altezza si calcolano con il metodo usuale. Se è dato dal problema l’istante della seconda osservazione T’C , il ∆t è dato da CC TTt −=∆ ' e non dalla formula relativa al passaggio al meridiano mobile. Nella costruzione del grafico, si utilizza il P’S e non il PS (trasporto analitico). INDIVIDUAZIONE DELL’ASTRO INCOGNITO
L’enunciazione tipica di un problema di identificazione di astro incognito è la seguente: “Verso le ore locali (tm) si osserva un astro incognito ottenendo Tc = ……; hi = …….; azb = …… Dati c, γc, v, e, K ed Rv identificare l’astro”. Metodo risolutivo: Si corregge l’altezza dell’astro supponendo che si tratti di stella (nel caso contrario gli errori commessi non inficeranno la validità del procedimento). Si corregge l’azimut dell’astro e si converte in angolo azimutale *Z
(vedi pag.16)
hi
= ……...
+ c (±) = ± …...
+ γc (±) = ± ……
ho = …..…
+ c1 = …..…
+ c2 = …..…
+ c3 = …..…
hv+1° = ….…
- 1°
hv = ………
89°60’
- h’ = ..............
zm = ±...............
+ δ’(±)=±..............
ϕV = ±..............
- ϕS(±) =m ...............
∆ϕ = ±...............
hv PE / W ↔ t
ϕ ⇒ Zv δ
18
K S T
Nv
VP
P P’
t t’
O i
Si risolve l’ambiguità del cronometro e con Tm (Tm = tm - λs ) si determina il tempo siderale locale ts : Si calcola la coascensione retta coα = t
- ts.
Con i dati calcolati di δ e coα
, si cerca nelle effemeridi, alla data del
Tm, se qualcuna tra le stelle ha valori prossimi a quelli trovati. In caso contrario bisogna cercare tra i pianeti utilizzando come dati di confronto T
e δ
(T
= t
- λs ).
Se l’identificazione dell’astro è richiesta nel contesto di un problema di calcolo del punto nave con rette d’altezza, dopo aver individuato l’astro si procede alla determinazione delle coordinate locali altazimutali utilizzando come dati di partenza P e δ ricalcolati in base al Tm. CINEMATICA NAVALE
SIMBOLI USATI : ρ = rilevamento polare d = distanza t = istante di tempo Rilv= rilevamento vero
( )
( )battutaprima
,,
,,
⇒
tdRil
o
td
v
ρ ( )
( )battutaseconda
',','
',','
⇒
tdRil
o
td
v
ρ
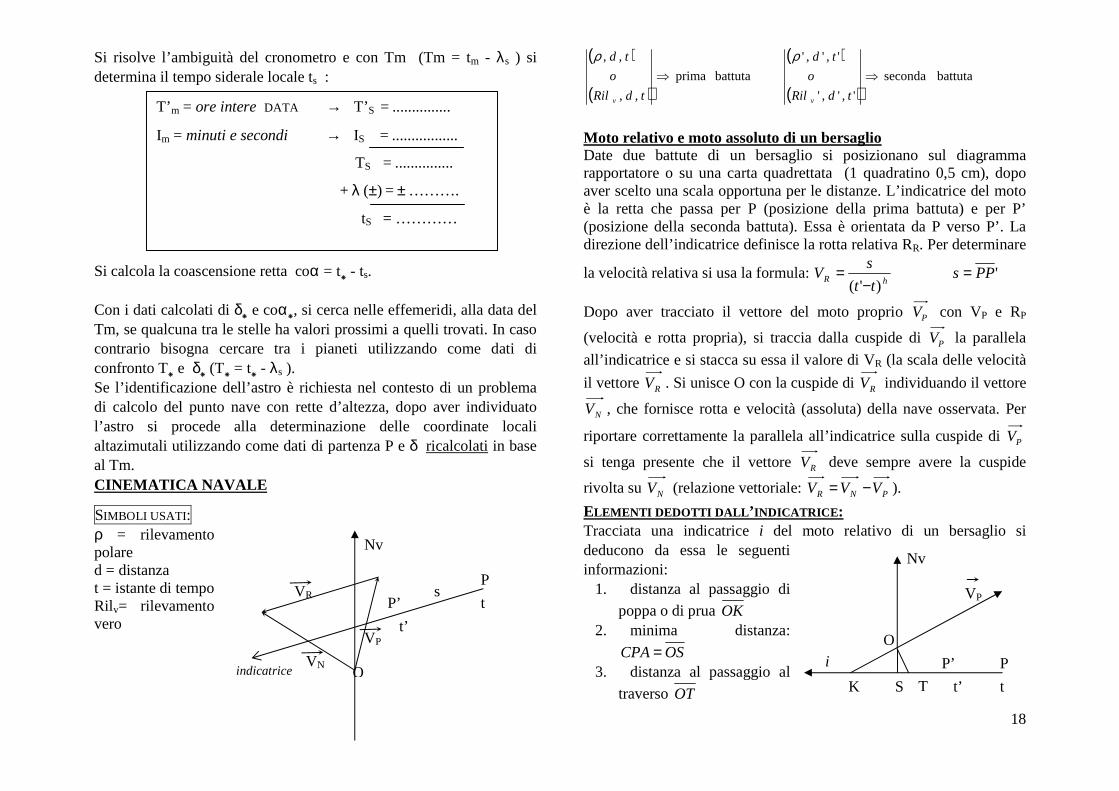
Moto relativo e moto assoluto di un bersaglio Date due battute di un bersaglio si posizionano sul diagramma rapportatore o su una carta quadrettata (1 quadratino 0,5 cm), dopo aver scelto una scala opportuna per le distanze. L’indicatrice del moto è la retta che passa per P (posizione della prima battuta) e per P’ (posizione della seconda battuta). Essa è orientata da P verso P’. La direzione dell’indicatrice definisce la rotta relativa RR. Per determinare
la velocità relativa si usa la formula: hR
tt
sV
)'( −= 'PPs =
Dopo aver tracciato il vettore del moto proprio PV con VP e RP
(velocità e rotta propria), si traccia dalla cuspide di PV la parallela
all’indicatrice e si stacca su essa il valore di VR (la scala delle velocità
il vettore RV . Si unisce O con la cuspide di RV individuando il vettore
NV , che fornisce rotta e velocità (assoluta) della nave osservata. Per
riportare correttamente la parallela all’indicatrice sulla cuspide di PV
si tenga presente che il vettore RV deve sempre avere la cuspide
rivolta su NV (relazione vettoriale: PNR VVV −= ).
ELEMENTI DEDOTTI DALL ’ INDICATRICE : Tracciata una indicatrice i del moto relativo di un bersaglio si deducono da essa le seguenti informazioni:
1. distanza al passaggio di
poppa o di prua OK 2. minima distanza:
OSCPA= 3. distanza al passaggio al
traverso OT
T’ m = ore intere DATA → T’S = ...............
Im = minuti e secondi → IS = .................
TS = ...............
+ λ (±) = ± ……….
tS = …………
VN
P
P’ s
t
t’
O
VP
VR
indicatrice
Nv

19
Inoltre si possono ricavare gli istanti corrispondenti: 1. ora del passaggio di poppa o di prua:
tttV
KPt K
R
∆+=⇒=∆ ''
2. ora del passaggio alla minima distanza (TCPA):
ttTCPAtV
SPt S
R
∆+==⇒=∆ ''
3. ora del passaggio al traverso:
tttV
TPt T
R
∆+=⇒=∆ ''
può essere uguale o distinta da quella delle distanze). Si individua così la manovra e la sua lunghezza la VP. La soluzione di questo problema esiste sempre anche se non sempre è praticamente realizzabile dalla nave che manovra (es. VP troppo elevata). INDICATRICI PARTICOLARI
DATO CPA In figura sono illustrate le due indicatrici che realizzano lo stesso
prefissato 'PKPKCPA == La prima è ottenuta con il triangolo THP ˆ e la seconda con il triangolo THP 'ˆ . Delle due manovre si preferisce quella che porta la nave propria a passare di poppa all’altra nave con una velocità relativa sufficientemente alta. La durata della manovra è
RV
NKt
'
'=∆
sull’indicatrice 1 e RV
NKt =∆ sull’indicatrice 2.
In figura la soluzione sull’indicatrice 2 (accostata a dritta con VR più alta e passaggio di poppa alla nave osservata) è quella raccomandata dalla normativa internazionale.
MANOVRE PER LA REALIZZAZIONE DI UNA DATA INDICATRICE Per realizzare una data indicatrice del moto relativo con una manovra della nave propria P, noti gli elementi del moto della nave osservata N (VN, RN), si possono scegliere le seguenti opzioni:
1) Manovra con sola variazione di rotta RP. 2) Manovra con sola variazione di velocità VP. 3) Manovra con variazione di rotta e velocità.
VARIAZIONE DI RP: Sia N la posizione della nave osservata e r l’indicatrice del moto
relativo che si vuole realizzare con la manovra. Per risolvere il problema si riporta la parallela (*) a r uscente dalla cuspide di VN (r’). Con centro in P e apertura di compasso VP si interseca r’ in K. La direzione di PK è
quella della RP desiderata. La nave N si sposta su r con velocità relativa RVHK = . Se l’intersezione K non esiste non è possibile
eseguire la manovra con sola variazione di rotta.
K
P
VR
N
K’
VN
1
2
V’ R
H
H’
T VP
N r
r’ K
RP
RN
Nv
VN H
P
20
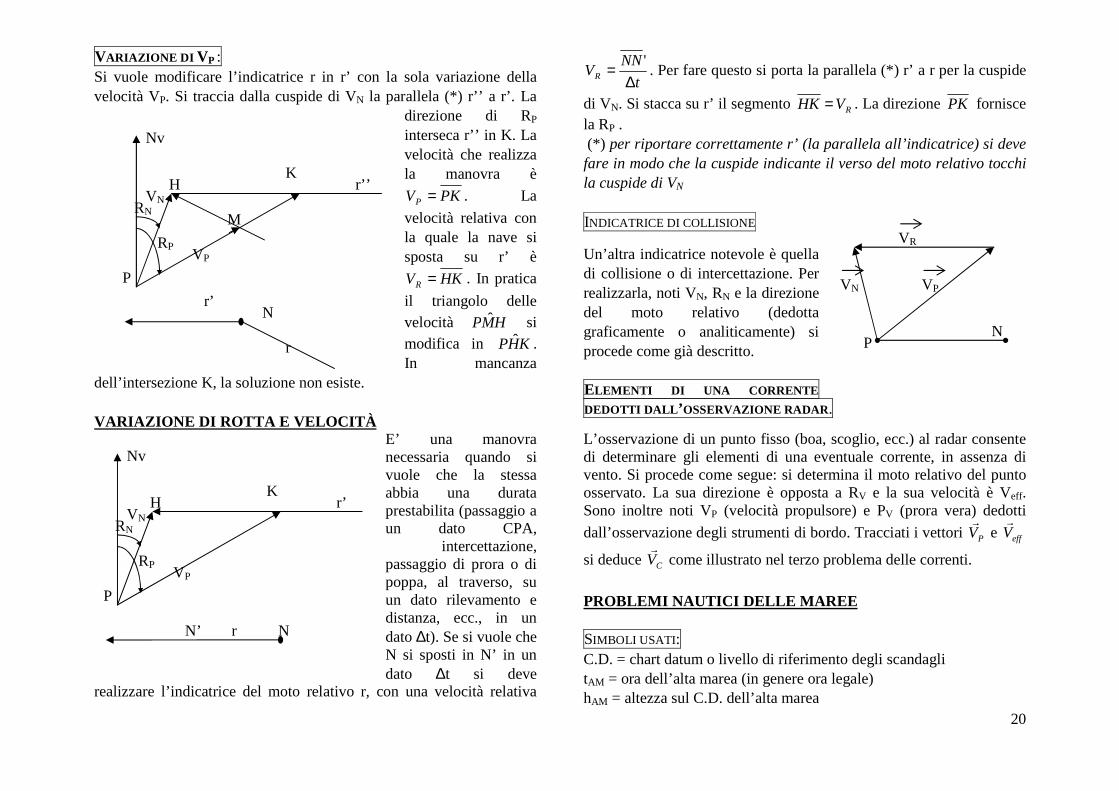
VARIAZIONE DI VP : Si vuole modificare l’indicatrice r in r’ con la sola variazione della velocità VP. Si traccia dalla cuspide di VN la parallela (*) r’’ a r’. La
direzione di RP interseca r’’ in K. La velocità che realizza la manovra è
PKVP = . La
velocità relativa con la quale la nave si sposta su r’ è
HKVR = . In pratica
il triangolo delle velocità HMP ˆ si modifica in KHP ˆ . In mancanza
dell’intersezione K, la soluzione non esiste. VARIAZIONE DI ROTTA E VELOCITÀ
E’ una manovra necessaria quando si vuole che la stessa abbia una durata prestabilita (passaggio a un dato CPA,
intercettazione, passaggio di prora o di poppa, al traverso, su un dato rilevamento e distanza, ecc., in un dato ∆t). Se si vuole che N si sposti in N’ in un dato ∆t si deve
realizzare l’indicatrice del moto relativo r, con una velocità relativa
t
NNVR ∆
= '. Per fare questo si porta la parallela (*) r’ a r per la cuspide
di VN. Si stacca su r’ il segmento RVHK = . La direzione PK fornisce la RP . (*) per riportare correttamente r’ (la parallela all’indicatrice) si deve fare in modo che la cuspide indicante il verso del moto relativo tocchi la cuspide di VN INDICATRICE DI COLLISIONE
Un’altra indicatrice notevole è quella di collisione o di intercettazione. Per realizzarla, noti VN, RN e la direzione del moto relativo (dedotta graficamente o analiticamente) si procede come già descritto. ELEMENTI DI UNA CORRENTE
DEDOTTI DALL ’OSSERVAZIONE RADAR .
L’osservazione di un punto fisso (boa, scoglio, ecc.) al radar consente di determinare gli elementi di una eventuale corrente, in assenza di vento. Si procede come segue: si determina il moto relativo del punto osservato. La sua direzione è opposta a RV e la sua velocità è Veff. Sono inoltre noti VP (velocità propulsore) e PV (prora vera) dedotti
dall’osservazione degli strumenti di bordo. Tracciati i vettori PVr
e effVr
si deduce CVr
come illustrato nel terzo problema delle correnti.
PROBLEMI NAUTICI DELLE MAREE SIMBOLI USATI : C.D. = chart datum o livello di riferimento degli scandagli tAM = ora dell’alta marea (in genere ora legale) hAM = altezza sul C.D. dell’alta marea
VN
Nv
VP
r’’ K
H
M
P
RP
RN
N r’
r
VN
Nv
RP
RN
VP
r’ K
H
P
N r N’
N P
VN
VR
VP

21
tBM = ora della bassa marea (in genere ora legale) hBM = altezza sul C.D. della bassa marea H/2 = semiampiezza di marea T= periodo di marea L.M. = livello medio del mare CORREZIONE DELL’ALTEZZA DEL MARE IN RELAZIONE ALLA PRESSIONE
ATMOSFERICA Prima di affrontare i problemi nautici delle maree, si deve precisare che i dati di alta e bassa marea si riferiscono sempre alla pressione media di 1013 millibar, da cui se nella zona in cui si vogliono trovare determinate altezze del mare la pressione è diversa da quella media allora si dovrà seguire il seguente metodo:
− per ogni millibar in meno rispetto alla pressione media 1013 si aggiunge 1 cm alle altezze di bassa e alta marea date
− per ogni millibar in più rispetto alla pressione media 1013 si toglie 1 cm alle altezze di bassa e alta marea date
Per risolvere i problemi di marea si utilizzano due metodi: uno grafico e l’altro analitico PRIMO PROBLEMA Dati tAM, hAM , tBM, hBM, tM determinare hM. tM è un qualsiasi istante compreso tra tAM e tBM ed hM è l’altezza di marea corrispondente a tM.
METODO GRAFICO Per risolvere il problema si costruisce un grafico in una scala opportuna (es. 1 cm sulla carta corrisponde ad 1 dm di escursione di marea) nel quale si riportano i valori di hAM, hBM, (livelli corrispondenti) ed il livello medio. Si calcola la semiampiezza di
marea 22
BMAM hhH −= e si traccia con centro in O e apertura di
compasso H/2 una semicirconferenza (fig. A e B). Si passa dunque al calcolo dell’angolo α come segue: FLUSSO (fig. A) BMAM tt > RIFLUSSO (fig. B) BMAM tt <
Calcolo il periodo di marea: Calcolo il periodo di marea: BMAM ttT −= AMBM ttT −=
e e BMM ttt −=∆ AMM ttt −=∆
ricavo α dalla proporzione: ricavo α dalla proporzione: Tt :180: °=∆α Tt :180: °=∆α Riporto α sul grafico partendo Riporto α sul grafico partendo dalla bassa marea dall’alta marea In entrambi i casi l’intersezione del lato di chiusura di α con la semicirconferenza di centro O e raggio H/2, individua il punto K. Il livello passante per K è quello corrispondente a tM. METODO ANALITICO Si fa un disegno indicativo dei vari livelli nel quale non è importante la loro posizione effettiva in scala, ma la loro posizione relativa. Dopo aver ricavato l’angolo α con la proporzione già usata per il metodo grafico ( Tt :180: °=∆α ), si potrà verificare uno dei seguenti casi:
FLUSSO Si riporta α dal livello della bassa marea ed è possibile avere:
°< 90α
FLUSSO α
K
C.D. hM hBM
hAM
L.M. H H/2
Fig. A
O
RIFLUSSO hM hBM
hAM
L.M. H H/2
Fig. B
α
K O
C.D.
22
OSH
hh
HOKOS
BMM −+=
⋅=⋅=
2
cos2
cos αα
°> 90α
KSH
hh
senH
senOKKS
BMM ++=
⋅=⋅=
2
2γγ
)90( °−= αγ
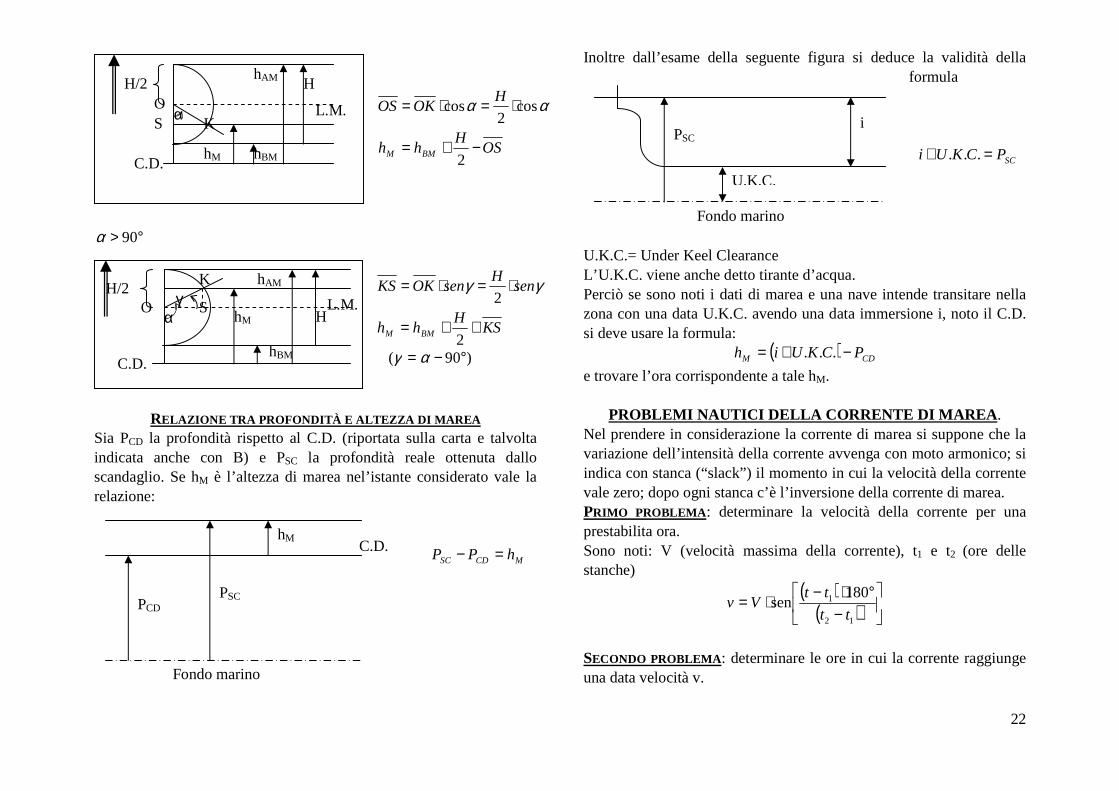
RELAZIONE TRA PROFONDITÀ E ALTEZZA DI MAREA Sia PCD la profondità rispetto al C.D. (riportata sulla carta e talvolta indicata anche con B) e PSC la profondità reale ottenuta dallo scandaglio. Se hM è l’altezza di marea nel’istante considerato vale la relazione:
MCDSC hPP =−
Inoltre dall’esame della seguente figura si deduce la validità della formula
SCPCKUi =+ ...
U.K.C.= Under Keel Clearance L’U.K.C. viene anche detto tirante d’acqua. Perciò se sono noti i dati di marea e una nave intende transitare nella zona con una data U.K.C. avendo una data immersione i, noto il C.D. si deve usare la formula:
( ) CDM PCKUih −+= ...
e trovare l’ora corrispondente a tale hM.
PROBLEMI NAUTICI DELLA CORRENTE DI MAREA . Nel prendere in considerazione la corrente di marea si suppone che la variazione dell’intensità della corrente avvenga con moto armonico; si indica con stanca (“slack”) il momento in cui la velocità della corrente vale zero; dopo ogni stanca c’è l’inversione della corrente di marea. PRIMO PROBLEMA : determinare la velocità della corrente per una prestabilita ora. Sono noti: V (velocità massima della corrente), t1 e t2 (ore delle stanche)
( )( )
−°⋅−⋅=
12
1 180sen
tt
ttVv
SECONDO PROBLEMA : determinare le ore in cui la corrente raggiunge una data velocità v.
α K
C.D. hBM
hAM
L.M.
H H/2
S
hM
O
α
K
C.D. hBM
hAM
L.M. H
H/2 S O γ
hM
PCD
hM
PSC
C.D.
Fondo marino
i PSC
U.K.C.
Fondo marino

23
Sono noti: V (velocità massima della corrente), t1 e t2 (ore delle stanche)
V
v=αsen
°⋅−+=
180
)(' 12
1
αtttt
°−°⋅−+=
180
)180()(" 12
1
αtttt
DETERMINAZIONE DELLE MIGLIA PERCORSE IN UN DATO
INTERVALLO DI TEMPO (T”- T’) DALLA CORRENTE DI MAREA :
( ) ( )
−°⋅−−
−°⋅−⋅−⋅
−=12
1
12
112
180)'cos(180)"cos()(
tt
tt
tt
tttt
VM
π
Velocità media della corrente tra gli istanti t’ e t”:
)'"( tt
MVm −
=
DETERMINAZIONE DELLA DISTANZA DA UN FARO CON MISURA DI
ANGOLO VERTICALE IN UNA ZONA DI MAREA NON TRASCURAB ILE . hrF = altezza del faro sul livello del mare hC.D.F = altezza del faro sul C.D. hM = altezza di marea Dalla figura si deduce la validità della formula:
MrFFDC hhh +=..
In un dato istante tm si misura l’angolo verticale αV sotto cui si osserva un faro. Sono noti i dati di marea della zona e l’altezza del faro sul C.D. Si ricava hM , e dalla precedente formula si ha:
MFDCrF hhh −= ..
e quindi
VmetrirF
metri ghd αcot⋅=
RICHIAMI SUL RADAR
ctD ⋅∆⋅=2
1
D = distanza in metri dell’oggetto osservato al radar ∆t = intervallo di tempo trascorso tra trasmissione e ricezione dell’impulso (µs) c = velocità delle O.E.M. in m/µs
)(
)(106
sT
sn
µµ=
n = cadenza: numero di impulsi trasmessi in un secondo T= intervallo di cadenza: tempo trascorso tra l’emissione di due impulsi successivi
Portata di base: cTD ⋅⋅=2
1 è la distanza corrispondente al bersaglio
visto a fondo scala con circuito limitatore disinserito Portata radar (o orizzonte radar): ( )heD +⋅= 16.2
e = elevazione dell’antenna sul livello del mare h = altezza del bersaglio sul livello del mare e ed h sono espresse in metri e D è ottenuta in miglia. La formula è ottenuta per condizioni medie dell’atmosfera
C.
hC.D. hr
hα
d Na

24
Guadagno dell’antenna: 2
4
λπA
kG ⋅=
K = costante dipendente dalla forma dell’antenna (k = 0.65 per il paraboloide) A = superficie attiva in m2 del radiatore λ = lunghezza d’onda dell’O.E.M. emessa in metri
Potere separatore in distanza: ctd ⋅⋅=2
1
t = durata dell’impulso c = velocità delle O.E.M. in m/µs (300 m/µs) d = distanza minima alla quale due bersagli allineati possono essere separati Relazione tra λ, f e c: Sia λ la lunghezza d’onda di una O.E.M., f la sua frequenza e c la sua velocità di propagazione. Vale la formula: fc ⋅= λ (c in m/sec; λ in
m; f in sec
1=Hz ).Essendo il periodo f
T1= si può anche scrivere
Tc
λ=
ORIZZONTE OTTICO O MARINO
( ) ( )mmgl ed ⋅= 8.1
la distanza alla quale, in condizioni medie atmosferiche, si può scorgere un oggetto di altezza h sul livello del mare è:
( ) ( ) ( )( )mmmgl hed +⋅= 8.1
RICHIAMI SULLE GIROBUSSOLE
Velocità di precessione: Ω⋅
=I
Cω
ω = velocità angolare di precessione (rad/sec) C = coppia che causa la precessione (N·m) I = momento di inerzia del girostato (kg·m2)
Coppia direttiva della bussola di Foucault: ZsenIC ˆcos ⋅⋅⋅Ω⋅= ϕρ
ρ= velocità angolare della Terra (ρ=2π/Trotazione terrestre) ϕ= latitudine
Z = angolo azimutale della direzione di Ω⋅I
Velocità di precessione per il giroscopio sospeso: Ω⋅
⋅⋅=I
senlP αω
P= peso della zavorra o antizavorra (N) l= distanza di P dal punto di sospensione del giroscopio (m) α= angolo di inclinazione dell’asse del giroscopio sul piano orizzontale
Periodo di orientamento del giroscopio sospeso:
ϕρπ
cos2
sec ⋅⋅⋅Ω⋅⋅=
lP
ITO
Deviazione dovuta al moto della nave:
V
V
senRV
RVtg
⋅+⋅⋅
−=ϕ
δcos'900
cos
RV = rotta vera contata circolarmente
IΩ
ω
C
x
y
z
25
V = velocità della nave Se dal calcolo risulta un segno – la deviazione è W, sarà E in caso contrario.
PERIODO DI SCHULER Se il periodo di orientamento uguaglia il periodo di Schuler si realizza l’annullamento delle deviazioni balistiche dovute a variazioni di rotta e velocità. Il periodo di Schuler è:
g
RTS ⋅= π2
con R raggio terrestre (6371 km) e g accelerazione di gravità (9,81 m/sec2). La condizione di annullamento delle deviazioni balistiche è:
ϕρϕρππ
coscos22
⋅⋅⋅Ω=⇔
⋅⋅⋅Ω⋅=⋅⇔=
lP
I
g
R
lP
I
g
RTT OS
Tale uguaglianza si può ottenere agendo in sede di progetto su I, P, l supponendo ϕ costante. AZIMUT E ALTEZZA PER PREORIENTARE UN ’ANTENNA . Le coordinate del punto sub-satellitare di un satellite geostazionario sono: ϕ’=0° λ’= …… E/W Z è la quota del satellite, R il raggio terrestre e (ϕ,λ) le coordinate della nave; da cui l’azimut e l’altezza si ricavano con le seguenti formule:
( )λλϕ −⋅= 'coscoscos 0m
( )( )
−°=−
=−−=
ZaOvestse
ZaEstse
tgm
tgZ
ˆ360,'
ˆ,'ˆcos0 λλ
λλϕ
( ) ( ) 022 cos2 mZRRRZRd +−++=
( )dR
ZRRd
2cos
222 +−+=α °−= 90αh
USO DELLA CALCOLATRICE SCIENTIFICA NELLA RISOLUZIONE DEI PROBLEMI DI NAVIGAZIONE
- Nozioni generali
Sulle calcolatrici scientifiche è presente un pulsante, comunemente indicato con (oppure INV o 2nd ), che serve per abilitare ulteriori funzioni che sono indicate sopra il margine superiore sinistro di alcuni tasti. Tali indicazioni sono dello stesso colore di SHIFT . Ad esempio è sempre presente il tasto . Per abilitare tale funzione sin-1 (arcoseno), bisogna premere e digitare l'argomento numerico. Le calcolatrici meno moderne sono fatte in modo che, per applicare una funzione su di un numero, si deve prima digitare il numero e poi il tasto o i tasti che abilitano la funzione stessa. In ciò che segue ci riferiremo ad una calcolatrice in cui si abilita prima la funzione e poi si introduce l'argomento. La funzione reciproco 1/x (o x -1) può essere disponibile come tasto diretto o essere abilitata da SHIFT . In ciò che segue supporremo verificata la prima ipotesi. Si tenga presente che le funzioni reciproco x -1 e quadrato x 2 , si digitano sempre dopo aver digitato il numero oppure agiscono direttamente su un numero che appare sul display, come risultato di un calcolo. - Calcoli con grandezze espresse nel sistema sessagesimale
Nel nostro caso ci si riferisce ai tempi (espressi in ore, minuti e secondi) e agli angoli (espressi in gradi, primi e secondi). Si tenga presente che la calcolatrice gestirà correttamente tali grandezze se è impostata a funzionare nella modalità DEG (degrees). Ciò risulta evidente all'utente se sul display appare l'indicazione DEG o D. Se la modalità DEG non è attiva, si può abilitare eseguendo la funzione DRG che circolarmente commuta le tre modalità disponibili per le misure angolari (radianti, gradi sessagesimali, gradi centesimali). Sulle calcolatrici più moderne invece della funzione DRG è presente il tasto MODE seguito da un numero che abilita la modalità desiderata. Oltre alla modalità DEG è conveniente usare la
SHIFT
sin -1
sin SHIFT sin
26
calcolatrice visualizzando i numeri con tutte le cifre decimali disponibili sul display (modalità NORM ) per le normali operazioni di calcolo nel campo reale (modo COMP ). Il tasto più comune disponibile per la gestione delle grandezze sessagesimali è il seguente: .
A seconda dei modelli di calcolatrice esso può funzionare in due modi: 1) La funzione diretta scrive il numero in gradi, primi e secondi e la
semplice operazione lo converte in gradi e parti decimali. La funzione inversa (abilitata da SHIFT ), agisce su un numero decimale presente sul display, convertendolo in gradi, primi e secondi. 2) La funzione diretta scrive il numero in gradi, primi e secondi,
oppure serve per convertire in gradi, primi e secondi un numero decimale.
La funzione inversa converte un numero espresso in gradi, primi e secondi in gradi e parti decimali. In ciò che segue si supporrà verificata l'ipotesi 1. Il tasto consente di fare le trasformazioni sui tempi e sugli angoli con semplicità. - Alcune trasformazioni con la calcolatrice. - Scrivere un angolo dato in gradi, primi e secondi e visualizzarlo in gradi e parti decimali ( trasformazione c1). Per scrivere ad esempio l'angolo α = 23° 44' 36'' si deve digitare. 23 44 36 . Sul display appare l'indicazione 23° 44' 36''. Digitando si effettua la trasformazione in gradi e parti decimali. Trasformare un angolo espresso in gradi e parti decimali nello stesso espresso in gradi, primi e secondi (trasformazione c2). Per esempio trasformare α = 10°,653 in gradi, primi e secondi. Si digita . Si fanno allo stesso modo le trasformazioni sui tempi dello stesso tipo ( a1, a2). - Trasformazione di α espresso in gradi, primi e secondi in α
espresso in primi e parti decimali (d2). Per esempio trasformare α = 30°40’12’’ in primi e parti decimali.
Si digita
- Trasformazione di α in primi e parti decimali in α in gradi, primi e Secondi (d1). Per esempio trasformare in gradi, primi e secondi, α = 500’.82 . Si digita
- Calcoli di funzioni trigonometriche dirette
Le funzioni trigonometriche dirette vengono abilitate dai seguenti tasti: Seno ; Coseno ; Tangente . ES.: Calcolare il seno di α = 44° 55' 16''. APPROSSIMAZIONI RICHIESTE NEI CALCOLI : - Cammini e Velocità: Arrotondamento alla prima cifra decimale. - ∆t in ore e parti decimali, α in gradi e parti decimali:
arrotondamento alla seconda cifra decimale (cioè al minuto o primo più prossimo).
- Funzioni trigonometriche: arrotondamento alla quinta cifra decimale.
- Trasformazione da gradi primi e secondi in primi e parti decimali: arrotondamento alla prima cifra decimale.
Calcoli e trasformazioni sui tempi. Premesso che 1h = 60m , e che 1m = 60s si procede come segue : a1) Trasformazione di ∆t espresso in ore, minuti e secondi in ∆t espresso in ore e parti decimali: ah bm cs ah.x (2 cifre decimali) a2) Trasformazione di ∆t espresso in ore e parti decimali in ∆t espresso in ore, minuti e secondi: ah.x (2 cifre decimali) ah bm cs La parte decimale di 0.x ⋅ 60, moltiplicata per 60, dà i secondi. b1) Trasformazione di ∆t espresso in giorni, ore, minuti e secondi in ∆t espresso in ore e parti decimali:
° ' ''
=
63
° ' ''
° ' '' ° ' '' ° ' ''
=
0 ⋅ 6 5 = 3 SHIFT ° ' ''
tan cos sin
1
2 1 0 4 0 3 ° ' '' ° ' '' ° ' '' =
⋅ 6 0 =
2 : 8 0 0 5 ° ' '' = . 6 0 SHIFT
bm = 0.x ⋅ 60
f = a ⋅ 24 + b +c + d/60 60
ah.x = ah + b + c/60 60
27
ag bh cm ds f h.x b2) Trasformazione di ∆t espresso in ore e parti decimali in ∆t espresso in giorni, ore, minuti e secondi: fh.x ag bh cm ds La parte decimale di 0.x ⋅ 60, moltiplicata per 60, dà i secondi. ** INT è la funzione "parte intera" troncata. Es. INT. (6.38) = (6).
Calcoli e trasformazioni sugli angoli. c1) Trasformazione di α espresso in gradi, primi e secondi in α espresso in gradi e parti decimali : a° b' c'' a°.x (2 cifre decimali) c2) Trasformazione da α in gradi e parti decimali in α espresso in gradi, primi e secondi: a°.x (2 cifre decimali) a° b' c'' La parte decimale di 0.x ⋅ 60, moltiplicata per 60, dà i secondi.
d1) Trasformazione da primi e parti decimali in gradi, primi e secondi: d'.x (1 cifra decimale) a° b' c'' d2) Trasformazione di α espresso in gradi, primi e secondi in α in primi e parti decimali: a° b' c'' d'.x (2 cifre decimali)
Le trasformazioni sui tempi simili a d1/d2 si svolgono allo stesso modo.
ag = INT (f /24) ; bh = f - a ⋅ 24 ; cm = 0.x ⋅ 60
a°.x = a° + b + c/60 60
b' = 0.x ⋅ 60
a° = INT (d /60) ; b' = d' - a ⋅ 60 ; c'' = 0.x ⋅ 60
d' = a ⋅ 60 + b + c /60
28
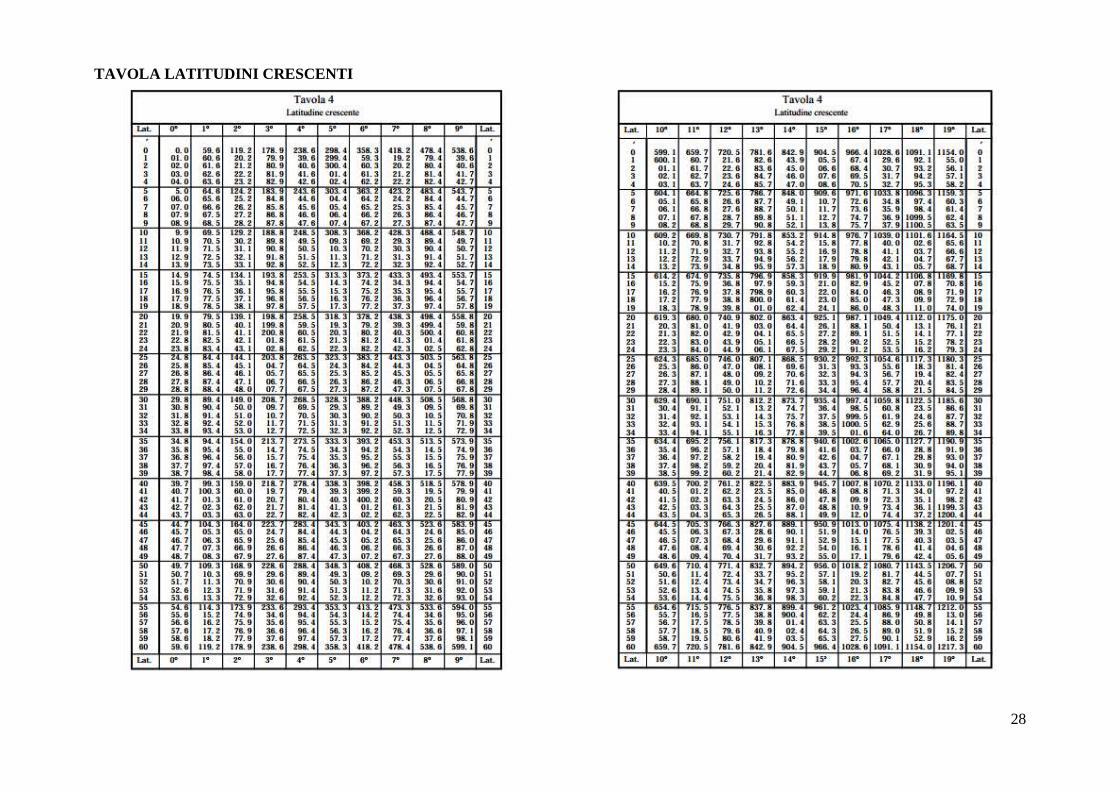
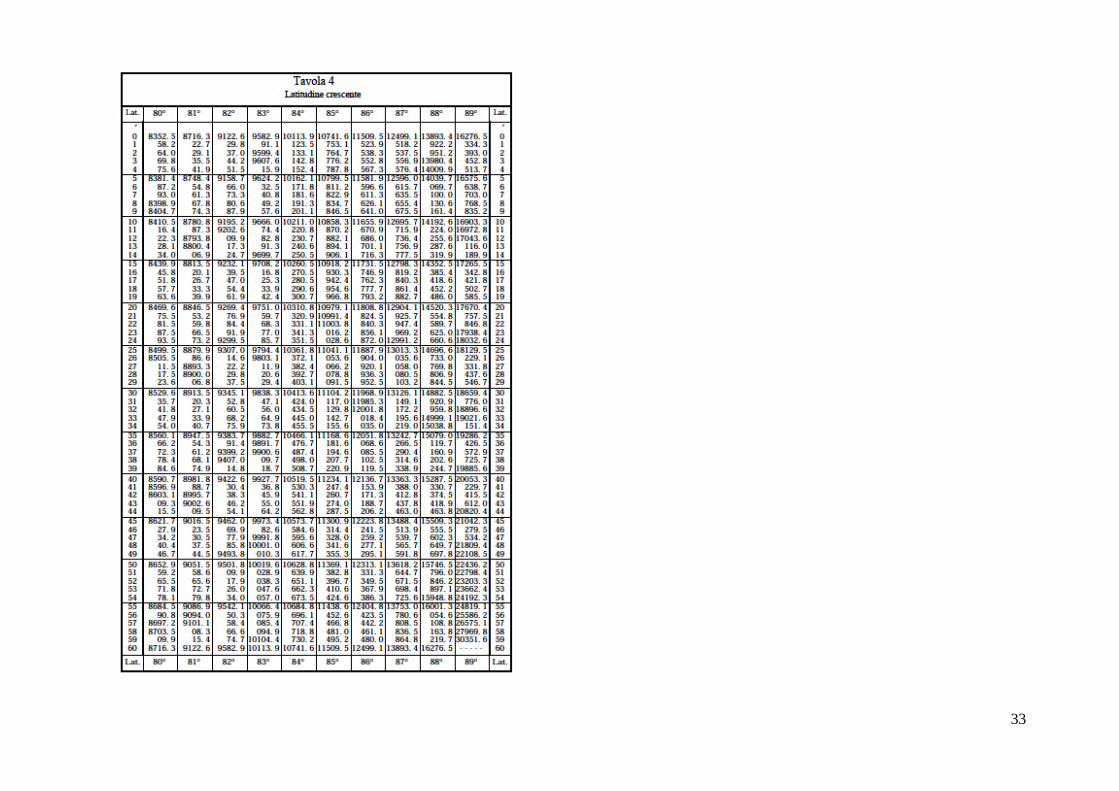
TAVOLA LATITUDINI CRESCENTI

29
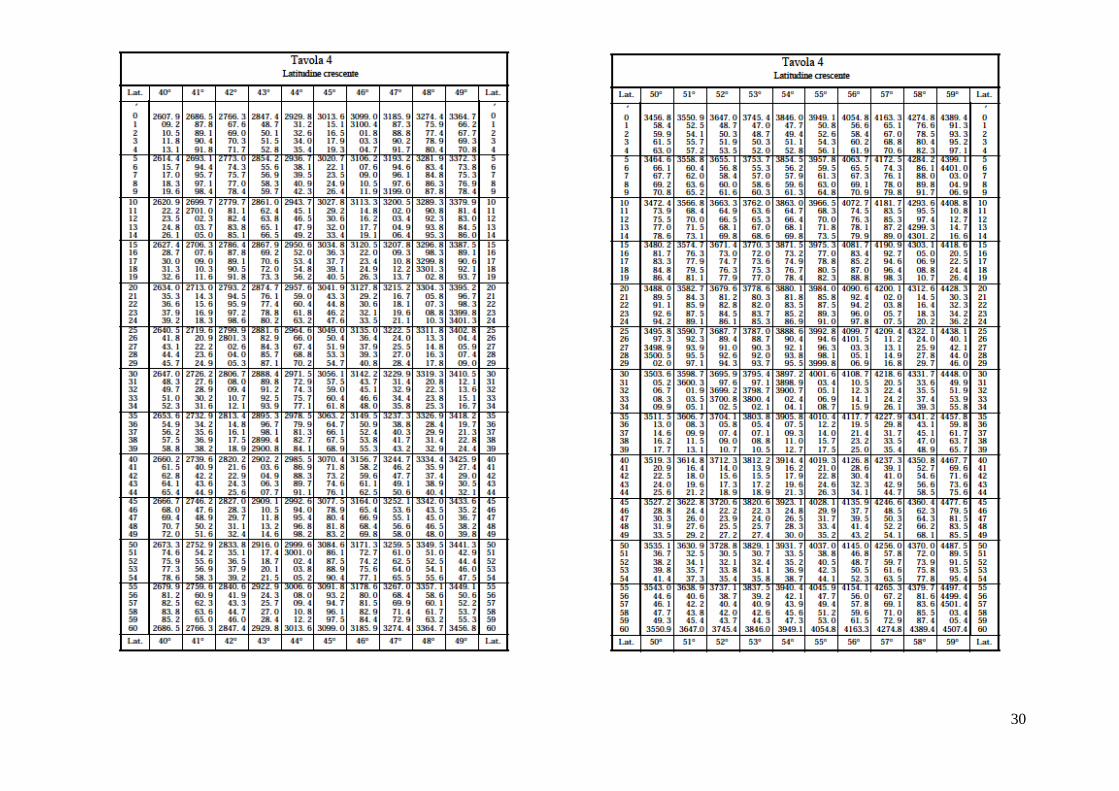
30
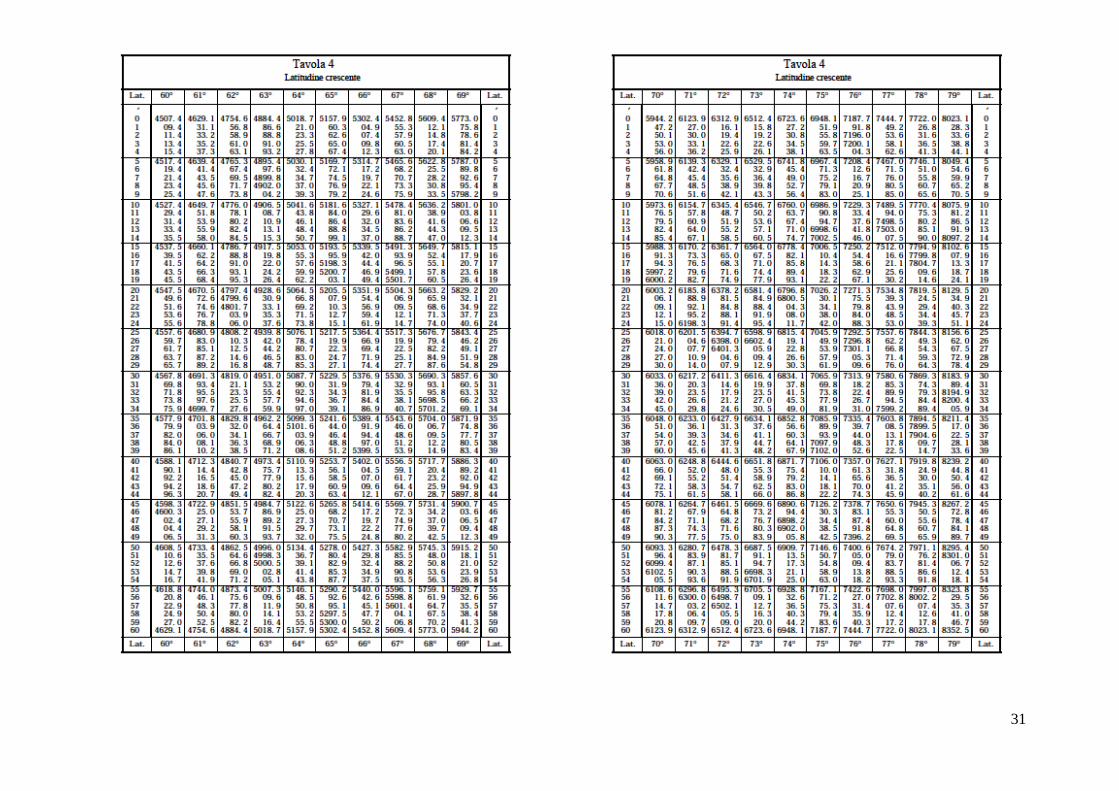
31
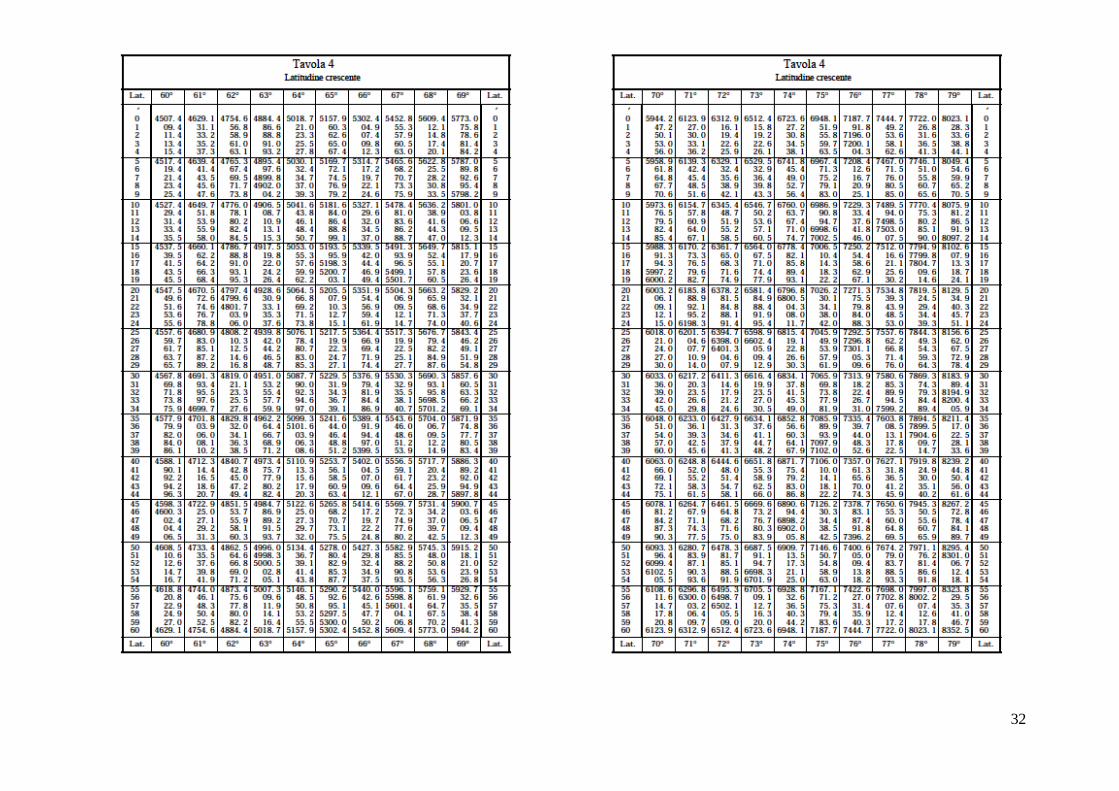
32
33