Stochastic Knowledge Representations and Machine Learning ...

Low-dimensional state-space representationsfor classical unsteady aerodynamic models
Steve Brunton & Clancy RowleyPrinceton University
49th AIAA ASM January 6, 2011
! " # $ % & ' (
!
"!
#!
$!
%!
&!
)*+,
-./0,1231-44567
quasi-steady and added-mass
ERA Model
input
d
dt
xαα
=
Ar 0 00 0 10 0 0
xαα
+
Br
01
α
CL =�Cr CLα CLα
�
xαα
+ CLα α

FLYIT Simulators, Inc.
Motivation
Predator (General Atomics)
Flexible Wing (University of Florida)
Applications of Unsteady Models
Conventional UAVs (performance/robustness)
Micro air vehicles (MAVs)
Flow control, flight dynamic control
Autopilots / Flight simulators
Gust disturbance mitigation
Need for State-Space Models
Need models suitable for control
Combining with flight models
Understand bird/insect flight
Bio-locomotion

3 Types of Unsteadiness
1. High angle-of-attack
α > αstall
Large amplitude, slow Moderate amplitude, fast
2. Strouhal number
St =Af
U∞
3. Reduced frequency
k =πfc
U∞
Small amplitude, very fast
� �� �Closely related
αeff = tan−1 (πSt)
Brunton and Rowley, AIAA ASM 2009

3 Types of Unsteadiness
3. Reduced frequency
k =πfc
U∞
Small amplitude, very fast
1. High angle-of-attack
α > αstall
Large amplitude, slow Moderate amplitude, fast
2. Strouhal number
St =Af
U∞
� �� �Closely related
αeff = tan−1 (πSt)
Brunton and Rowley, AIAA ASM 2009

Candidate Lift Models
CL = CL(α)
CL = CLαα
CL = 2πα
Motivation for State-Space Models
Computationally tractable
fits into control framework
Captures input output dynamics accurately
CL(t) = CδL(t)α(0) +
� t
0Cδ
L(t− τ)α(τ)dτ Wagner’s Indicial Response
Theodorsen’s Model
CL =π
2
�h+ α− a
2α�
� �� �Added-Mass
+2π
�α+ h+
1
2α
�1
2− a
��
� �� �Circulatory
C(k)
Leishman, 2006.
Theodorsen, 1935.
Wagner, 1925.

0 10 20 30 40 50 60 70 80 900.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Angle of Attack, (deg)
Lift
Coe
ffici
ent,
CL
Average Lift pre SheddingAverage Lift post SheddingMin/Max of Limit Cycle
Lift vs Angle of Attack
Low Reynolds number, (Re=100)
Hopf bifurcation at αcrit ≈ 28◦ (pair of imaginary eigenvalues pass into right half plane)

0 10 20 30 40 50 60 70 80 900.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Angle of Attack, (deg)
Lift
Coe
ffici
ent,
CL
Average Lift pre SheddingAverage Lift post SheddingMin/Max of Limit Cycle
Models based on Hopf normal form capture vortex shedding
Lift vs Angle of Attack
Low Reynolds number, (Re=100)
Hopf bifurcation at αcrit ≈ 28◦ (pair of imaginary eigenvalues pass into right half plane)

High angle of attack models
x = (α− αc)µx− ωy − ax(x2 + y2)
y = (α− αc)µy + ωx− ay(x2 + y2)
z = −λz
=⇒
r = r�(α− αc)µ− ar2
�
θ = ω
z = −λz
Heuristic Model Galerkin Projection onto POD
Full DNS
Reconstruction

High angle of attack models
x = (α− αc)µx− ωy − ax(x2 + y2)
y = (α− αc)µy + ωx− ay(x2 + y2)
z = −λz
=⇒
r = r�(α− αc)µ− ar2
�
θ = ω
z = −λz
Heuristic Model Galerkin Projection onto POD
Full DNS
Reconstruction

Lift vs. Angle of Attack
0 10 20 30 40 50 60 70 80 900.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Angle of Attack, (deg)
Lift
Coe
ffici
ent,
C L
Average Lift pre SheddingAverage Lift post SheddingMin/Max of Limit Cycle
Need model that captures lift due to moving airfoil!

Lift vs. Angle of Attack
0 10 20 30 40 50 60 70 80 900.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Angle of Attack, (deg)
Lift
Coe
ffici
ent,
C L
Average Lift pre SheddingAverage Lift post SheddingMin/Max of Limit CycleSinusoidal (f=.1,A=3)
Need model that captures lift due to moving airfoil!

Lift vs. Angle of Attack
0 10 20 30 40 50 60 70 80 900.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Angle of Attack, (deg)
Lift
Coe
ffici
ent,
C L
Average Lift pre SheddingAverage Lift post SheddingMin/Max of Limit CycleSinusoidal (f=.1,A=3)Canonical (a=11,A=10)
Need model that captures lift due to moving airfoil!

0 10 20 30 40 50 60 70 80 900.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Angle of Attack, (deg)
Lift
Coe
ffici
ent,
C L
Average Lift pre SheddingAverage Lift post SheddingMin/Max of Limit CycleSinusoidal (f=.1,A=3)Canonical (a=11,A=10)
Lift vs. Angle of Attack
! " # $ % & ' ("&
#!
#&
)*+,-./0.)11234
! " # $ % & ' (
!5&
"
"5&
#
67
89:-
.
.;<=>?).@A$B. A!>?).@A$B. A"&
Need model that captures lift due to moving airfoil!

Lift vs. Angle of Attack
0 10 20 30 40 50 60 70 80 900.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Angle of Attack, (deg)
Lift
Coe
ffici
ent,
C L
Average Lift pre SheddingAverage Lift post SheddingMin/Max of Limit Cycle
Wagner and Theodorsen models linearized at α = 0◦

Theodorsen’s Model
Apparent Mass
Not trivial to compute, but essentially solved
force needed to move air as plate accelerates
Increasingly important for lighter aircraft
Circulatory Lift
Need improved models here
source of all lift in steady flight
Captures separation effects
k =πfc
U∞
2D Incompressible, inviscid model
Unsteady potential flow (w/ Kutta condition)
Linearized about zero angle of attack
Leishman, 2006.
Theodorsen, 1935.
CL =π
2
�h+ α− a
2α�
� �� �Added-Mass
+2π
�α+ h+
1
2α
�1
2− a
��
� �� �Circulatory
C(k)
C(k) =H
(2)1 (k)
H(2)1 (k) + iH
(2)0 (k)

Empirical Theodorsen
CL =π
2
�h + α− a
2α�
� �� �Added-Mass
+ 2π
�α + h +
12α
�12− a
��
� �� �Circulatory
C(k)
CL = C1
�α− a
2α�
+ C2
�α +
12α
�12− a
��C(k)
L [CL]L [α]
= C1
�1s −
a2
�+ C2
�1s2 + 1
2s
�12 − a
��C(s)
Generalized Coefficients
Transfer Function
Added MassCL+
Quasi-SteadyCL(!e!)
C(s)!
C2
!1s2
+12s
"12! a
#$
C1
"1s! a
2
#

Pade Approximate C(k)
10 2 10 1 100 101 10210
5
0
Mag
nitu
de (d
B)
Theodorsen Function C(s)
10 2 10 1 100 101 10220
10
0
Phas
e
Frequency
Theodorsen C(s)Pade Approximation
10 2 10 1 100 101 1024020
0204060
Mag
nitu
de (d
B)
Lift Model (Leading Edge Pitch)
10 2 10 1 100 101 102200
100
0Ph
ase
Frequency
TheodorsenApproximation
C(k) ≈ .99612− .1666 kk+.0553 − .3119 k
k+.28606
C(s) ≈ .1294s2 + .1376s + .01576.25s2 + .1707s + .01582
s = 2k
Breuker, Abdalla, Milanese, and Marzocca,AIAA Structures, Structural Dynamics, and Materials Conference 2008.
C(k) =H
(2)1 (k)
H(2)1 (k) + iH
(2)0 (k)

Added MassCL+
Quasi-SteadyCL(!e!)
C(s)!
C2
!1s2
+12s
"12! a
#$
C1
"1s! a
2
#
Empirical C(s)
10 3 10 2 10 1 100 101 102 1038
6
4
2
0
Mag
nitu
de (d
B)
10 3 10 2 10 1 100 101 102 10325
20
15
10
5
0
Frequency
Phas
e
C(s), TheodorsenC(s), ERA/Wagner r=2
Isolating C(k)
Subtract off quasi-steady and divide through by added-mass
Start with empirical ERA model
Remainder is C(k)

Alternative Representation
CL = C1
�α− a
2α�
+ C2
�α +
12α
�12− a
��C(k)
CL = −a
2C1
� �� �CLα
α +�C1 +
C2
2
�12− a
��
� �� �CLα
α + C2����CLα
α− C2C�(k)
�α +
12α
�12− a
��
� �� �fast dynamics
Generalized Theodorsen
CL(α, α, α,x) = CLαα+ CLα α+ CLα α+ Cx
d
dt
x1
x2
αα
=
−.6828 −.0633 C2 C2(1− 2a)/41 0 0 00 0 0 10 0 0 0
x1
x2
αα
+
0001
α
CL =�.197 .0303 .5176C2 C1 + .5176C2(1− 2a)/4
�
x1
x2
αα
−aC12 α
State-Space Representation
Stability derivatives plus fast dynamics

Bode Plot of Theodorsen
Frequency response
Low frequencies dominated by quasi-steady forces
High frequencies dominated by added-mass forces
output is lift coefficient CL
input is ( is angle of attack)
Crossover region determined by Theodorsen’s function
α α
C(k)
10 3 10 2 10 1 100 101 102 103
50
0
50
100
Mag
nitu
de (d
B)
10 3 10 2 10 1 100 101 102 103
180
160
140
120
100
80
60
40
20
w (rad c/U)
Phas
e (d
eg)
x/c=0.00x/c=0.10x/c=0.20x/c=0.30x/c=0.40x/c=0.50x/c=0.60x/c=0.70x/c=0.80x/c=0.90x/c=1.00
CL =π
2
�h+ α− a
2α�
� �� �Added-Mass
+2π
�α+ h+
1
2α
�1
2− a
��
� �� �Circulatory
C(k)
k =πfc
U∞

Zeros of Theodorsen’s Model
5 4 3 2 1 0 1 2 3 4 5
0.6
0.4
0.2
0
0.2
0.4
0.6
Zeros of Theodorsen Model, Varying Pitch Point
x/c=0.0
x/c=.25
x/c=.50
x/c=.75
x/c=1.0
As pitch point moves aft of center, zero enters RHP at +infinity.

Wagner’s Indicial Response
Model Summary
convolution integral inconvenient for feedback control design
Reconstructs Lift for arbitrary input
Linearized about
Based on experiment, simulation or theory
α = 0
Leishman, 2006.
Wagner, 1925.
u(t)
!1 !2 !3 t
!"#$%
&$%#$%
!1
!2
!3
!'#$()*+,*)#&")*
t0
y!(t ! !1)
y!(t ! !2)
y!(t ! !3)
y(t) = y! " u
y!(t ! t0)
CL(t) = CSL(t)α(0) +
� t
0CS
L(t− τ)α(τ)dτ
CL(t) =
� t
0Cδ
L(t− τ)α(τ)dτ =�Cδ
L ∗ α�(t)
Given an impulse in angle of attack, , the time history of Lift is
The response to an arbitrary input is given by linear superposition:α(t)
CδL(t)α = δ(t)
Given a step in angle of attack, , the time history of Lift is
The response to an arbitrary input is given by:
CSL(t)α = δ(t)
α(t)

Reduced Order Wagner
CL(α, α, α,x) = CLαα+ CLα α+ CLα α+ Cx
Y (s) =
�CLα
s2+
CLα
s+ CLα +G(s)
�s2U(s)
d
dt
xαα
=
Ar 0 00 0 10 0 0
xαα
+
Br
01
α
CL =�Cr CLα CLα
�
xαα
+ CLα α
Stability derivatives plus fast dynamics
Transfer Function
State-Space Form
Quasi-steady and added-mass Fastdynamics

Reduced Order Wagner
+ CL
G(s)
!"#$%&$'(#)*+,+#))()+-#$$
.#$'+)*/#-%0$
CL!
CL!
s
CL!
s2
!
Brunton and Rowley, in preparation.
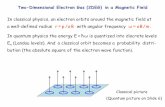
Model Summary
ODE model ideal for control design
Based on experiment, simulation or theory
Linearized about α = 0
Recovers stability derivatives associated with quasi-steady and added-mass
CLα , CLα , CLα
quasi-steady and added-mass
ERA Model
input
fast dynamics
d
dt
xαα
=
Ar 0 00 0 10 0 0
xαα
+
Br
01
α
CL =�Cr CLα CLα
�
xαα
+ CLα α
CL(t) = CSL(t)α(0) +
� t
0CS
L(t− τ)α(τ)dτ

Bode Plot - Pitch (LE)
Frequency response
Model without additional fast dynamics [QS+AM (r=0)] is inaccurate in crossover region
Models with fast dynamics of ERA model order >3 are converged
output is lift coefficient CL
Punchline: additional fast dynamics (ERA model) are essential
input is ( is angle of attack)α α
Brunton and Rowley, in preparation.
10 2 10 1 100 101 10240
20
0
20
40
60
Mag
nitu
de (d
B)
10 2 10 1 100 101 102180
160
140
120
100
80
60
40
20
0
Phas
e (d
eg)
Frequency (rad U/c)
QS+AM (r=0)ERA r=2ERA r=3ERA r=4ERA r=7ERA r=9
Pitching at leading edge

Bode Plot - Pitch (QC)
Frequency response
Reduced order model with ERA r=3 accurately reproduces Wagner
Wagner and ROM agree better with DNS than Theodorsen’s model.
output is lift coefficient CL
input is ( is angle of attack)α α
Brunton and Rowley, in preparation.
Pitching at quarter chord
Asymptotes are correct for Wagner because it is based on experiment
Model for pitch/plunge dynamics [ERA, r=3 (MIMO)] works as well, for the same order model
10 2 10 1 100 101 102
40
20
0
20
40
60
Mag
nitu
de (d
B)
10 2 10 1 100 101 102200
150
100
50
0
Frequency (rad U/c)
Phas
e (d
eg)
ERA, r=3WagnerTheodorsenDNSERA, r=3 (MIMO)
Quarter-Chord Pitching

0 1 2 3 4 5 6 70
5
10
Ang
le (d
eg)
Time
0 1 2 3 4 5 6 70
0.5
Hei
ghtAngle of Attack
Vertical Position
0 1 2 3 4 5 6 7
0.4
0.2
0
0.2
0.4
0.6
Time
CL
DNSWagnerERA, r=3 (MIMO)ERA, r=3 (2xSISO)QS+AM (r=0)
Pitch/Plunge Maneuver
Brunton and Rowley, in preparation.
Canonical pitch-up, hold, pitch-down maneuver, followed by step-up in vertical position
Reduced order model for Wagner’s indicial responseaccurately captures lift coefficient history from DNS
OL, Altman, Eldredge, Garmann, and Lian, 2010

Lift vs. Angle of Attack
0 10 20 30 40 50 60 70 80 900.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Angle of Attack, (deg)
Lift
Coe
ffici
ent,
C L
Average Lift pre SheddingAverage Lift post SheddingMin/Max of Limit Cycle
Wagner and Theodorsen models linearized at α = 0◦

Lift vs. Angle of Attack
0 10 20 30 40 50 60 70 80 900.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Angle of Attack, (deg)
Lift
Coe
ffici
ent,
C L
Average Lift pre SheddingAverage Lift post SheddingMin/Max of Limit Cycle
Wagner and Theodorsen models linearized at α = 0◦

Bode Plot of ERA Models
10 2 10 1 100 101 10250
0
50
100Frequency Response for Leading Edge Pitching
Mag
nitu
de (d
B)
10 2 10 1 100 101 102200
150
100
50
0
Phas
e
Frequency
=0=5=10=15=20=25
Results
At larger angle of attack, phase converges to -180 at much lower frequencies. I.e., solutions take longer to reach equilibrium in time domain.
Lift slope decreases for increasing angle of attack, so magnitude of low frequency motions decreases for increasing angle of attack.
Consistent with fact that for large angle of attack, system is closer to Hopf instability, and a pair of eigenvalues are moving closer to imaginary axis.

Poles and Zeros of ERA Models
4 3 2 1 0 1
2
1
0
1
2
Poles (zoom in)
4 3 2 1 0 1
2
1
0
1
2
Zeros (zoom in)
40 30 20 10 0
2
1
0
1
2
Poles, [0,25]
40 30 20 10 0
2
1
0
1
2
Zeros, [0,25]
0
5
10
15
20
25
As angle of attack increases, pair of poles (and pair of zeros) march towards imaginary axis.
This is a good thing, because a Hopf bifurcation occurs at αcrit ≈ 28◦

Poles and Zeros of ERA Models
4 3 2 1 0 1
2
1
0
1
2
Poles (zoom in)
4 3 2 1 0 1
2
1
0
1
2
Zeros (zoom in)
40 30 20 10 0
2
1
0
1
2
Poles, [0,25]
40 30 20 10 0
2
1
0
1
2
Zeros, [0,25]
0
5
10
15
20
25
As angle of attack increases, pair of poles (and pair of zeros) march towards imaginary axis.
This is a good thing, because a Hopf bifurcation occurs at αcrit ≈ 28◦

10−2 10−1 100 101 102−40
−20
0
20
40
60Frequency Response Linearized at various !
Mag
nitu
de (d
B)
ERA, !=0DNS, !=0ERA, !=10DNS, !=10ERA, !=20DNS, !=20
10−2 10−1 100 101 102−200
−150
−100
−50
0
Frequency
Phas
e
Bode Plot of Model (-) vs Data (x)
Direct numerical simulation confirms that local linearized models are accurate for small amplitude sinusoidal maneuvers

0 10 20 30 40 50 60 70 80 900.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Angle of Attack, (deg)
Lift
Coe
ffici
ent,
CL
Average Lift pre SheddingAverage Lift post SheddingMin/Max of Limit Cycle
! " # $ % & ' ("&
#!
#&
)*+,-./0.)11234
! " # $ % & ' (
!5&
"
"5&
#
67
89:-
.
.;<=>?).@A$B. A!>?).@A$B. A"&
! " # $ % & ' ("&
#!
#&
)*+,-./0.)11234
! " # $ % & ' (
!5&
"
"5&
#
67
89:-
.
.;<=>?).@A$B. A!>?).@A$B. A"&
Large Amplitude Maneuver
G(t) = log�cosh(a(t− t1)) cosh(a(t− t4))cosh(a(t− t2)) cosh(a(t− t3))
�α(t) = α0 + αmax
G(t)max(G(t))
Compare models linearized at
andα = 0◦ α = 15◦
For pitching maneuver with
α ∈ [15◦,25◦]
Model linearized at
captures lift response more accurately
α = 15◦
OL, Altman, Eldredge, Garmann, and Lian, 2010

Conclusions
Reduced order model based on indicial response at non-zero angle of attack
- Based on eigensystem realization algorithm (ERA)- Models appear to capture dynamics near Hopf bifurcation- Locally linearized models outperform models linearized at α = 0◦
Empirically determined Theodorsen model
- Theodorsen’s C(k) may be approximated, or determined via experiments- Models are cast into state-space representation- Pitching about various points along chord is analyzed
Brunton and Rowley, AIAA ASM 2009-2011
OL, Altman, Eldredge, Garmann, and Lian, 2010
Leishman, 2006.
Wagner, 1925.
Theodorsen, 1935.
Breuker, Abdalla, Milanese, and Marzocca, AIAA 2008.
Future Work:
- Combine models linearized at different angles of attack - Add large amplitude effects such as LEV and vortex shedding

Lift vs. Angle of Attack
0 10 20 30 40 50 60 70 80 900.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Angle of Attack, (deg)
Lift
Coe
ffici
ent,
C L
Average Lift pre SheddingAverage Lift post SheddingMin/Max of Limit Cycle
Wagner and Theodorsen models linearized at α = 0◦
Models based on Hopf normal form capture vortex shedding

10 2 10 1 100 101 102
10
20
30
40
50
60
Mag
nitu
de (d
B)
10 2 10 1 100 101 10280
100
120
140
160
180
Frequency (rad U/c)
Phas
e (d
eg)
ERA, r=3WagnerTheodorsenDNSERA, r=3 (MIMO LE)ERA, r=3 (MIMO QC)
Bode Plot - Plunge
Brunton and Rowley, in preparation.
Sinusoidal Plunging
Frequency response
Reduced order model with ERA r=3 accurately reproduces Wagner
Wagner and ROM agree better with DNS than Theodorsen’s model.
output is lift coefficient CL
input is ( vertical acceleration )
Asymptotes are correct for Wagner because it is based on experiment
Plunging changes flight path angle and free stream velocity
Model for pitch/plunge dynamics [ERA, r=3 (MIMO)] works as well, for the same order model
y