Logarithmic stability in determination of a 3D...
1
Logarithmic stability in determination of a 3D viscoelasticity system coefficient Maya de Buhan (1,2) Axel Osses (2) (1) Universit´ e Pierre et Marie Curie, LJLL, Paris, France. (2) Universidad de Chile, CMM, Santiago, Chile. Introduction Let Ω be an open bounded domain of R 3 with a Lipschitz continuous boundary ∂ Ω. We consider the following system endowed with initial and boundary conditions: P u(x, t)= f (x, t), ∀(x, t) ∈ Ω × (0, +∞), u(x, 0) = ¯ u 0 (x), ∀x ∈ Ω, ∂ t u(x, 0) = ¯ u 1 (x), ∀x ∈ Ω, u(x, t)=0, ∀(x, t) ∈ ∂ Ω × (0, +∞), (1) where P is the integro-differential hyperbolic operator: P u(x, t)= ∂ 2 t u(x, t) -∇· μ(x)(∇u(x, t)+ ∇u(x, t) T )+ λ(x)(∇· u)(x, t)I + Z t 0 ∇· ˜ μ(x, s)(∇u(x, t - s)+ ∇u(x, t - s) T )+ ˜ λ(x, s)(∇· u)(x, t - s)I ds. This system models the dynamics of a viscoelastic material subjected to a load f , u being the displacement vector, (λ, μ) the Lam´ e coefficients and ( ˜ λ, ˜ μ) the viscosity coefficients. We assume that the coefficient ˜ μ can be decomposed as ˜ μ(x, t)= p(x)h(t), ∀(x, t) ∈ Ω × (0, +∞). (2) Hence, knowing (λ, μ, ˜ λ, h, ¯ u 0 , ¯ u 1 ,f ), we would like to recover p(x), ∀x ∈ Ω, from measurements of u(x, t), ∀(x, t) ∈ Γ × (0,T ), where Γ is a part of ∂ Ω and T> 0. We proved a Carleman estimate and a sharp unique continuation result for the system (1). We used these results to obtain a logarithmic stability estimate for the inverse problem of recovering the coefficient p from a unique measurement on an arbitrary part of the boundary. We proposed a method to solve the problem numerically and illustrated the theoretical result by a numerical example. Logarithmic stability result Condition 1. The scalar function q satisfies Condition 1 if • there exists K> 0 such that ∀x ∈ Ω, q (x) ≥ K , • there exists x 0 ∈ R 3 \ Ω such that ∀x ∈ Ω, 1 2 q (x)+ ∇q (x) · (x - x 0 ) ≥ 0. Theorem 1. Let u (resp. ¯ u) be the solution of the system (1)-(2), associated to the coefficient p (resp. ¯ p). We assume that • (λ, μ) ∈ C 2 ( Ω) 2 and ( ˜ λ, ˜ μ) ∈ C 2 ( Ω × (0, +∞)) 2 are such that the solutions u and ¯ u ∈ W 8,∞ (Ω × (0, +∞)) 3 , • μ and λ +2μ satisfy Condition 1, • p =¯ p is known in a neighborhood ω of ∂ Ω, • h(0) 6=0, h 0 (0) = 0, • there exists M> 0 such that, ∀x ∈ Ω \ ω , |(∇ ¯ u 0 + ∇ ¯ u T 0 )(x) · (x - x 0 )|≥ M . Then, for Γ ⊂ ∂ Ω arbitrarly small, there exist κ ∈ (0, 1) and T 0 > 0 such that, for all T>T 0 , the following estimate holds true: kp - ¯ pk H 2 (Ω) ≤ C log 2+ C X 1≤|α|≤2 k∂ α x (u - ¯ u)k 2 L 2 (Γ×(0,T )) -κ (3) where C depends on the C 2 ( Ω)-norm of p and ¯ p and on the W 8,∞ (Ω × (0,T )) 3 - norm of u and ¯ u. Idea of the proof It consists in : • writing a Carleman estimate for the system (1) by – decoupling the system in equations for u, ∇∧ u and ∇· u as in Imanuvilov and Yamamoto (2005), – using the change of variable of Cavaterra, Lorenzi and Yamamoto (2006) to treat the integral term of the operator P , – applying a pointwise Carleman estimate of Klibanov and Timonov (2004) for a scalar hyperbolic equation, • applying the method of Bukhgeim and Klibanov to obtain the H¨ older stability kp - ¯ pk H 2 (Ω) ≤ C ku - ¯ uk κ H 2 (ω ×(0,T )) , (4) • proving a sharp unique continuation for the system (1) by – applying the method of Bellassoued (2001) which uses some results of Rob- biano (1995), – introducing a new transformation inspired from the Fourier-Bros-Iagolnitzer transform but which is able to treat the integral term of P . Application The system (1) is a simplified model for the mechanical behavior of the brain structures. We consider it now in 2D, with the following coefficients: • μ(x)= λ(x) = 1200, ˜ λ(x, t) = 400 h(t) and h(t)= e -t/τ with τ =1, • ¯ p(x) = 400, in the healthy tissue and ¯ p(x) > 400, in the tumor as in Fig 1, • f (x, t)=0, ¯ u 1 (x)=0 and ¯ u 0 as in Fig 1, T = 50 and ω as in Fig 1. Fig 1. Coefficient ¯ p, initial data ¯ u 0 , observation zone ω , computational mesh We solve the direct problem (1) by discretizing the equations • in space using P 1 Lagrange Finite Elements in the mesh shown on Fig 1, • in time using a θ -scheme with θ =0.5 (implicit centered scheme) and δt =1, • by using the trapezium formula for the integral term. A uniform experimental error of δ = 2% is added to the observed solution u obs . We are looking for the minimizer p * of the non quadratic functional J (p)= 1 2 Z T 0 Z ω |u(p) - u obs | 2 + |∇(u(p) - u obs )| 2 dx dt, We solve the minimization problem by a BFGS algorithm. Fig 2. Initial mesh and basis functions n ◦ 1, 2 and 4 As regularization method, we look for p * in the finite dimensional space P K of the K first eigenfunctions of the mesh (see Fig 2), that is P K = p ∈ P, p =¯ p| ∂ Ω + K X i=1 p i ϕ i , where ¯ p| ∂ Ω is a lifting of the trace of ¯ p on ∂ Ω and -Δϕ i (x)= σ i ϕ i (x), ∀x ∈ Ω, ϕ i (x)=0, ∀x ∈ ∂ Ω. We propose an adaptive method to solve the problem accurately. After computing a first solution p * 0 on the initial mesh, we use it to refine the mesh and to adapt the spectral basis as follows: -∇ · (a(x)∇ϕ i (x)) = σ i ϕ i (x), ∀x ∈ Ω, ϕ i (x)=0, ∀x ∈ ∂ Ω, with a(x)= 1 ∇p * 0 (x) . Fig 3. Adapted mesh and basis functions n ◦ 1, 2 and 4 at step 2 Numerical results 10 20 30 40 50 60 70 80 90 100 0 1 2 3 4 5 6 7 8 9 10 number of eigenvectors in the basis % of error —— step 0 —— step 1 with K 0 = 40 —— step 1 with K 0 = 80 Fig 4. Relative error for the coefficient p in L 2 -norm with respect to K Fig 5. Exact coefficient, recovered coefficient at step 0 for K = 100 and K = 50, recovered coefficient at step 2 for K = 50
Transcript of Logarithmic stability in determination of a 3D...

Logarithmic stability in determination of a 3D viscoelasticity system coefficientMaya de Buhan(1,2) Axel Osses(2)
(1) Universite Pierre et Marie Curie, LJLL, Paris, France. (2) Universidad de Chile, CMM, Santiago, Chile.
Introduction
Let Ω be an open bounded domain of R3 with a Lipschitz continuous boundary ∂Ω.We consider the following system endowed with initial and boundary conditions:∣∣∣∣∣∣∣∣∣
Pu(x, t) = f (x, t), ∀(x, t) ∈ Ω× (0,+∞),u(x, 0) = u0(x), ∀x ∈ Ω,∂tu(x, 0) = u1(x), ∀x ∈ Ω,u(x, t) = 0, ∀(x, t) ∈ ∂Ω× (0,+∞),
(1)
where P is the integro-differential hyperbolic operator:
Pu(x, t) = ∂2tu(x, t)−∇ ·
(µ(x)(∇u(x, t) +∇u(x, t)T ) + λ(x)(∇ · u)(x, t)I
)+∫ t
0∇ ·
(µ(x, s)(∇u(x, t− s) +∇u(x, t− s)T ) + λ(x, s)(∇ · u)(x, t− s)I
)ds.
This system models the dynamics of a viscoelastic material subjected to a loadf , u being the displacement vector, (λ, µ) the Lame coefficients and (λ, µ) theviscosity coefficients. We assume that the coefficient µ can be decomposed as
µ(x, t) = p(x)h(t), ∀(x, t) ∈ Ω× (0,+∞). (2)
Hence, knowing (λ, µ, λ, h, u0, u1, f ), we would like to recover p(x), ∀x ∈ Ω, frommeasurements of
u(x, t), ∀(x, t) ∈ Γ× (0, T ),
where Γ is a part of ∂Ω and T > 0.We proved a Carleman estimate and a sharp unique continuation result for thesystem (1). We used these results to obtain a logarithmic stability estimate forthe inverse problem of recovering the coefficient p from a unique measurementon an arbitrary part of the boundary. We proposed a method to solve the problemnumerically and illustrated the theoretical result by a numerical example.
Logarithmic stability result
Condition 1. The scalar function q satisfies Condition 1 if• there exists K > 0 such that ∀x ∈ Ω, q(x) ≥ K,
• there exists x0 ∈ R3 \ Ω such that ∀x ∈ Ω,1
2q(x) +∇q(x) · (x− x0) ≥ 0.
Theorem 1. Let u (resp. u) be the solution of the system (1)-(2), associated tothe coefficient p (resp. p). We assume that• (λ, µ) ∈ C2(Ω)2 and (λ, µ) ∈ C2(Ω× (0,+∞))2 are such that the solutions u
and u ∈ W 8,∞(Ω× (0,+∞))3,•µ and λ + 2µ satisfy Condition 1,• p = p is known in a neighborhood ω of ∂Ω,•h(0) 6= 0, h′(0) = 0,
• there exists M > 0 such that, ∀x ∈ Ω \ ω, |(∇u0 +∇uT0 )(x) · (x− x0)| ≥M .Then, for Γ ⊂ ∂Ω arbitrarly small, there exist κ ∈ (0, 1) and T0 > 0 such that, forall T > T0, the following estimate holds true:
‖p− p‖H2(Ω) ≤ C
log
2 +C∑
1≤|α|≤2
‖∂αx (u− u)‖2L2(Γ×(0,T ))
−κ
(3)
where C depends on the C2(Ω)-norm of p and p and on the W 8,∞(Ω × (0, T ))3-norm of u and u.
Idea of the proof
It consists in :•writing a Carleman estimate for the system (1) by
– decoupling the system in equations for u, ∇ ∧ u and ∇ · u as in Imanuvilovand Yamamoto (2005),
– using the change of variable of Cavaterra, Lorenzi and Yamamoto (2006) totreat the integral term of the operator P ,
– applying a pointwise Carleman estimate of Klibanov and Timonov (2004) fora scalar hyperbolic equation,
• applying the method of Bukhgeim and Klibanov to obtain the Holder stability
‖p− p‖H2(Ω) ≤ C‖u− u‖κH2(ω×(0,T )), (4)
• proving a sharp unique continuation for the system (1) by– applying the method of Bellassoued (2001) which uses some results of Rob-
biano (1995),– introducing a new transformation inspired from the Fourier-Bros-Iagolnitzer
transform but which is able to treat the integral term of P .
Application
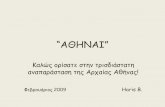
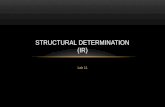
The system (1) is a simplified model for the mechanical behavior of the brainstructures. We consider it now in 2D, with the following coefficients:•µ(x) = λ(x) = 1200, λ(x, t) = 400h(t) and h(t) = e−t/τ with τ = 1,• p(x) = 400, in the healthy tissue and p(x) > 400, in the tumor as in Fig 1,• f (x, t) = 0, u1(x) = 0 and u0 as in Fig 1, T = 50 and ω as in Fig 1.
Fig 1. Coefficient p, initial data u0, observation zone ω, computational meshWe solve the direct problem (1) by discretizing the equations• in space using P1 Lagrange Finite Elements in the mesh shown on Fig 1,• in time using a θ-scheme with θ = 0.5 (implicit centered scheme) and δt = 1,• by using the trapezium formula for the integral term.
A uniform experimental error of δ = 2% is added to the observed solution uobs.We are looking for the minimizer p∗ of the non quadratic functional
J(p) =1
2
∫ T
0
∫ω
(|u(p)− uobs|2 + |∇(u(p)− uobs)|2
)dx dt,
We solve the minimization problem by a BFGS algorithm.
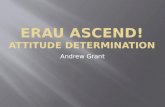
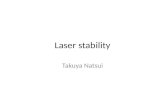
Fig 2. Initial mesh and basis functions n1, 2 and 4
As regularization method, we look for p∗ in the finite dimensional space PK of theK first eigenfunctions of the mesh (see Fig 2), that is
PK =
p ∈ P, p = p|∂Ω +K∑i=1
piϕi
,where p|∂Ω is a lifting of the trace of p on ∂Ω and∣∣∣∣∣ −∆ϕi(x) = σiϕi(x), ∀x ∈ Ω,
ϕi(x) = 0, ∀x ∈ ∂Ω.
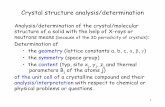
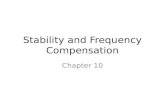
We propose an adaptive method to solve the problem accurately. After computinga first solution p∗0 on the initial mesh, we use it to refine the mesh and to adaptthe spectral basis as follows:∣∣∣∣∣ −∇ · (a(x)∇ϕi(x)) = σiϕi(x), ∀x ∈ Ω,
ϕi(x) = 0, ∀x ∈ ∂Ω,with a(x) =
1
∇p∗0(x).
Fig 3. Adapted mesh and basis functions n1, 2 and 4 at step 2
Numerical results
10 20 30 40 50 60 70 80 90 1000
1
2
3
4
5
6
7
8
9
10
number of eigenvectors in the basis
% o
f e
rro
r —— step 0
—— step 1 with K0 = 40
—— step 1 with K0 = 80
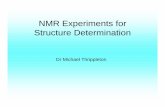
Fig 4. Relative error for the coefficient p in L2-norm with respect to K
Fig 5. Exact coefficient, recovered coefficient at step 0 for K = 100 and K = 50,recovered coefficient at step 2 for K = 50