Angular Kinematics Ch 9 Notes. What is a radian? 1 Θ rad = 57.3 ͦ of twist.

Lecture 9 : RotationsChapter 10
Definitions of angular position θ angular velocity angular acceleration
Relationship between variables in angular motion and linear motion
Rotational inertia (or moment of inertia I )
Rotational kinetic energy K
Torque

Goal
Redo everything we have done until now, but for a rotational motion.
1. equation of motion2. forces3. energy4. momentum (next lecture)

!3
Analogy BetweenLinear and Rotational Variables
(more about torque later)

!4
DefinitionsAngular Position: θ (always in radians) Angular Displacement:
Angular velocity:
ω ≡ lim
Δt→0
ΔθΔt
≡dθd t
(Previously we only considered cases with constant ω .) Angular acceleration:
α ≡ lim
Δt→0
ΔωΔt
≡dωd t
≡d2θ
d t 2
0 0 (You pick for each problem.)θ θ θ θΔ = −
Direction: Speeding up – in the direction of ω⃗ Slowing down – opposite to direction of ω⃗

1D Equations of motion
!5
1D Equations of Motion for Constant Acceleration a.
1D Equations of Motion for Constant ANGULAR Acceleration 𝜶 (greek letter is alpha).

!6
Equations for Constant α
All equations are written for θ in radians. Sometimes you will need to convert radians to/from degrees or revolutions.
Signs take care of direction just like in linear motion
✓(rad) =⇡
180�✓(deg)

!7
Example
1.

!8
Example

Uniform Circular Motion (review)
ν
!9
r
a=ac
Δθ
ac =
v2
rat =
dv
dt

!10
Angular and Translational Quantities : arc length and velocity
arc length s = distance traveled during an angle θlinear velocity v = angular velocity times the position r
s =θ r
v =ω r
Finite size rigid objects are collections of infinitely small point-like elements
v, ω and r are vectors…. so what is the direction of the angular velocity ω??

11
Vector Product (or cross product) (REVIEW)
φ~a⇥~b
|~a⇥~b| = absin�
~a
~b
|~a⇥~b| = absin�
~a⇥~b 6= ~b⇥ ~a
This only gives the magnitude of the cross product
A cross product gives a vector = magnitude and direction

!12
Direction of Angular Velocity
•Use your right hand. •Curl your fingers in the direction of rotation. •Thumb points in the direction of angular velocity ω⃗ (greek letter is omega).
•Mathematically: cross product of two vectors,
~v = ~w ⇥ ~r
r is from the origin to the edge

!13
Problem of the Day
1. A cyclist is riding his bicycle due east in the Tour de France bicycle race. What is the direction of the angular velocity of his bicycle wheels?
A) North. B) South. C) East. D) West. E) Up. F) Down.

!14
Problem of the Day
1. A cyclist is riding his bicycle due east in the Tour de France bicycle race. What is the direction of the angular velocity of his bicycle wheels?
A) North. B) South. C) East. D) West. E) Up. F) Down.

!15
Angular and Translational Quantities : accelerations
| ar |=| ac |= v2
r=ω2 r2
r=ω2 r
|at| =dv
dt=
d(!r)
dt=
rd!
dt= r↵
𝜶 is the angular acceleration
ac =
v2
rat =
dv
dtRemember:

ExampleThe Earth has a radius 6.37E6 m and spins on its axis once per day (86400s)Calculate:a) the Earth’s angular speed due to its axial spinb) the tangential speed of a point on earth’s equator due to the planet’s axial spinc) the radial and tangential acceleration components of the point in part (d)

ExampleThe Earth has a radius 6.37E6 m and spins on its axis once per day (86400s)Calculate:a) the Earth’s angular speed due to its axial spinb) the tangential speed of a point on earth’s equator due to the planet’s axial spinc) the radial and tangential acceleration components of the point in part (d)
a)
b)c)

2
Angular Position θ (always in radians) Angular Displacement: Δθ =θ −θ0
Angular velocity: ω ≡ lim
Δt→0
ΔθΔt
≡dθd t
Angular acceleration: α ≡ lim
Δt→0
ΔωΔt
≡dωd t
≡d2θ
d t 2
Summary Concepts 1

Summary Concepts 2
Definition of rotational quantities: θ, ω, 𝜶Magnitude and direction of ωCentripetal and tangential accelerationsLaws of angular motion
|at| = ↵r
|ar| = !2r
~v = ~w ⇥ ~r
s =θ r
v =ω r

Example
An electric turntable is 0.75m in diameter.It is rotating about a fixed axis with an initial angular velocity 0.25 rev/s and a constant angular acceleration of 0.9 rev/s2.
a) What is the angular velocity of the turntable after 0.2s?b) Through how many revolutions has the turntable spun in this time interval?c) What is the tangential speed at a point on the rim of the turntable at t =0.2s?d) What is the magnitude of the total acceleration of a point on the rim at t=0.2s?

Example
Note until now, I did not bother convert into radians. It’s ok as long as the units stay consistent.
c)
use equation of motion #3
θ = 0 +0.5(0.25+0.34)*0.2 = 0.068 rev

A wheel 2.00 m in diameter lies in a vertical plane and rotates about its central axis with a constant angular acceleration of 4.00 rad/s2. The wheel starts at rest at t = 0, and the radius vector of a certain point P on the rim makes an angle of 57.3° with the horizontal at this time. At t = 2.00 s, find the following.
(a) the angular speed of the wheel
(b) the tangential speed of the point P
(c) the total acceleration of the point P
(d) the angular position of the point P
Example 10.19

A wheel 2.00 m in diameter lies in a vertical plane and rotates about its central axis with a constant angular acceleration of 4.00 rad/s2. The wheel starts at rest at t = 0, and the radius vector of a certain point P on the rim makes an angle of 57.3° with the horizontal at this time. At t = 2.00 s, find the following. (a)the angular speed of the wheel (b) the tangential speed of the point P
Example

A wheel 2.00 m in diameter lies in a vertical plane and rotates about its central axis with a constant angular acceleration of 4.00 rad/s2. The wheel starts at rest at t = 0, and the radius vector of a certain point P on the rim makes an angle of 57.3° with the horizontal at this time. At t = 2.00 s, find the following. (a) the angular speed of the wheel: 8 rad/s (b) the tangential speed of the point P: 8m/s (c) the total acceleration of the point P (d) the angular position of the point P
Example

A machine part rotates at an angular speed of 0.06 rad/s; its speed is then increased to 2.2 rad/s at an angular acceleration of 0.7 rad/s2. (a) Find the angle through which the part rotates before reaching this final speed.
(b) If both the initial and final angular speeds are doubled and the angular acceleration remains the same, by what factor is the angular displacement changed?
c) Why?
Example 10.8

A machine part rotates at an angular speed of 0.06 rad/s; its speed is then increased to 2.2 rad/s at an angular acceleration of 0.7 rad/s2. (a) Find the angle through which the part rotates before reaching this final speed. (b) If both the initial and final angular speeds are doubled and the angular acceleration remains the same, by what factor is the angular displacement changed? Why?
Example

A bar on a hinge starts from rest and rotates with an angular acceleration α = 10 + 6t, where α is in rad/s2 and t is in seconds. Determine the angle in radians through which the bar turns in the first 4 s.
Example 10.4

A bar on a hinge starts from rest and rotates with an angular acceleration α = 10 + 6t, where α is in rad/s2 and t is in seconds. Determine the angle in radians through which the bar turns in the first 4 s.
Example

!29
Rotational inertia & Energy
This gives rotational kinetic energy as:
This summation is called rotational inertia (or moment of inertia) :

8
Rotational Inertia

9
Example: Rotational Inertia of a Rod
Irod = r2 dm =∫ r2 ML
"
#$
%
&'dr
0
L
∫ =ML
"
#$
%
&' r2 dr
0
L
∫
Irod =ML
"
#$
%
&'
L3
3 = 1
3ML2
Irod = r2 dm∫L
dL=dr dm =
dLL
M
r
dL = dr

10
Properties of Rotational Inertia
The rotational inertia of an object depends on: • Its mass. • Its shape. • The axis of rotation. • NOT the angular velocity or acceleration. The rotational inertia is a measure of how difficult it is to get an object to start rotating or to slow down once started. For two or more objects rotating around a common axis, the rotational inertia is the sum of the rotational inertia for each object. iI I=∑
The rotational inertia is a measure of how difficult it is to get an object to start rotating or to slow down once started

11
Rigid Bodies
Spherical shapes:
R
solid sphere: 2 25
I M R=
spherical shell: I = 2
3M R2
Note: here R is the radius of the sphere. flat disk:
I = 1
2M R2
Examples are tabulated in your text (p.286).
R
Examples of moment of inertias are in your textbook table 10.2


Example
The pulley in the figure

Example
Use conservation of energy butdon’t forget to take the motion ofthe pulley into account.

Parallel Axis Theorem
I = Icm +M D2 where M is the body’s total mass
I is the moment of inertia about any axis parallel to the axis through the CoM

Example

Example
Parallel axis theorem

!40
Torque
Massless rodm
tF
r
Axis of rotation
Newton's Second Law appliesFor rotation about a fixed axis:
Ft = ma
rFt = mra = mr(rα) = mr2α
Torque : τ ≡ rFt = Iα
Multiply by r on each side gives:
Remember:
Define the torque 𝛕 (greek letter tau) as:
~⌧ = ~r ⇥ ~F = I↵ If r and F are perpendicular then ⌧ = Fr

For linear motion, we have netF F ma= =∑! ! !.
For rotation, we have, net Iτ τ α= =∑
!! ! • When the rotation is speeding up (|ω
!| increasing), α
! and ω
! are
in the same direction.
• When the rotation is slowing down (|ω!
| decreasing), α!
and ω!
are in opposite directions.
Newton’s 2nd law
Torque τ and angular acceleration α are always in the same direction.
~Fnet =X
~F = m~a
~⌧net =X
~⌧ = I~↵
linear motion:
rotational motion:
When the rotation is speeding up (ω⃗ increasing), 𝜶 and ω are in the same direction
When the rotation is slowing down (ω⃗ decreasing), 𝜶 and ω are in opposite directions

Right Hand Rule

Torque on a Rigid Body
43
Fr θ
sin 0o = 0 and sin 180o = 0
~⌧ = ~r ⇥ ~F = I↵
|⌧ | = |r||F |sin✓
r⃗ is the vector from the axis of rotation to where the force is applied
The torque can be zero in three different ways:1. No force is applied |F⃗|=02. The force is applied at the axis of rotation / pivot point |r⃗|=03. F⃗ and r⃗ are parallel or anti-parallel sinθ=0

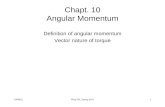
Example: angular acceleration A Rod Suspended by a String off the center
44
|⌧ | = |r||F |sin✓
| 𝝉 | = rmg (into the page)
~⌧net =X
~⌧ = I~↵
What is the direction of the rod’s angular acceleration?Same as torque: into the page
rodstring
F= mg
CM
pivot point
~⌧ = ~r ⇥ ~F = I↵

Example: Torque on a rod
45

46
An external force can cause a rigid object to spin around a fixed axis. The effect of a force on rotation depends on its direction.
Effect of torque
component changes | | component no change in | |t
r
FF
ω
ω
→
→
!
! | ω⃗ |
| ω⃗ |

Line of action of force & moment arm of force
is called the moment arm of Fr⊥!
is called the moment arm (or lever arm) of F⃗

τ = r F sin φ
τ= (r sin φ) F =r⊥F
(1)
τ= r (F sin φ) =rF ⊥ τ F⊥
(2)
Two ways to calculate torque

Net torque = 0
Balance of Torque
τnet,x =∑ τx = 0 τnet,y =∑ τy = 0 τnet,z =∑ τz = 0
If we use Cartesian system
When an object has several torques applied to it, the sum of which prevent the object from rotating.

ExampleKatie (56 kg) and Alyssa (43 kg) want to balance on a 1.75m long seesaw. Assume the see-saw bar has negligible mass. Where should they place the pivot point?

Known: mK= 56 kg, mA= 43 kg, rK + rA = 1.75 m Unknown: rK= ?, rA=?
Define Katie’s distance in terms of the length of the seesaw and Alyssa’s distance. rK= 1.75 m- rA
There is no rotation if the vector sum of the torques is equal to zero. The torque by Katie is out of the page and the torque by Alyssa is into the page. mK g(1.75 m - rA) - mA grA =0
Solve for rArA=0.99 m
rK=1.75 m-0.99 m=0.76 m
Example

Take away concepts
Analogy Between Linear and Rotational Variables
1. Correspondence x θ→ v ω→ a α→ m I→ F τ→ 2. Centripetal and tangential acceleration. 3. Rotational inertia: 2
i iI m r=∑ 4. Rotational kinetic energy: 1 2
2K Iω=
5. Torque: Newton's second law: Iτ α=
!!
Parallel axis theorem: I = Icm + M D2 Equations of motion:
~⌧ = ~r ⇥ ~F = I↵

Rod against the wall by a rope. a) What is the tension T in the rope? b) What is the normal force N by the wall? c) What is the friction force F exerted by the wall?
Mass of the rod m=1 kg Length of the rod L=1 m
rope
rod
30o
Problem 7

rope
rod=L
30o
L
Free body diagram
30o
T
mg
Ν
Ff
OL
Problem 7 Solution
τ∑ = 0: mgL2
−T sin30°(L) = 0
T =mg
2sin30°= 9.8 N
0: cos30 0
cos30 8.49 NxiF T N
N T
= °− =
= ° =∑
0: sin30 0
sin30
- sin30 4.9 N2sin30
yi f
f
F T F mg
F T mg
mg mg
= °+ − =
= − ° +
= °+ =°
∑a)
b)
c)

15
Find the force of frictional force f of the floor on the ladder. (Assume the wall is frictionless.)
h
Problem 8

h
frictionless
Force balance
Torque balance
16
Problem 8 Solution

15
a) A 30 kg wheel (hoop) with radius 1.2m, is rotating at 100 rad/sec. It must be brought to a stop in 15 s. How much work must be done by
an outside force to stop it
Problem 9
b) Calculate the torque and force which need to be applied at the edge of the hoop for it to be brought to a stop in 15s.

I = r 2 dm∫ r = const = R.
I = R2 dm∫ = R2 M =1.22 ×30 = 43.2 kg-m2
W = K f − Ki = 0− 1
2Iω 2
ω =
ΔθΔt
=100 rad/sec
W = −
12
Iω 2 = −12
43.2×1002 = −2.16×105 J
Problem 9 Solution
a)
τ = Iα = I Δω
Δt= 43.2100
15= 288 N-m
288 240 N ( 54 lb)1.2
RF FRτ
τ = = = = ≈
b)