Lecture 1. How to model: physical grounds Outline Physical grounds: parameters and basic laws...
43
Lecture 1. How to model: physical grounds Outline • Physical grounds: parameters and basic laws • Physical grounds: rheology
-
Upload
draven-pallas -
Category
Documents
-
view
220 -
download
1
Transcript of Lecture 1. How to model: physical grounds Outline Physical grounds: parameters and basic laws...
Lecture 1. How to model: physical grounds
Outline
• Physical grounds: parameters and basic laws
• Physical grounds: rheology
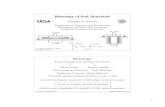
Physical grounds: displacement, strain and stress tensors
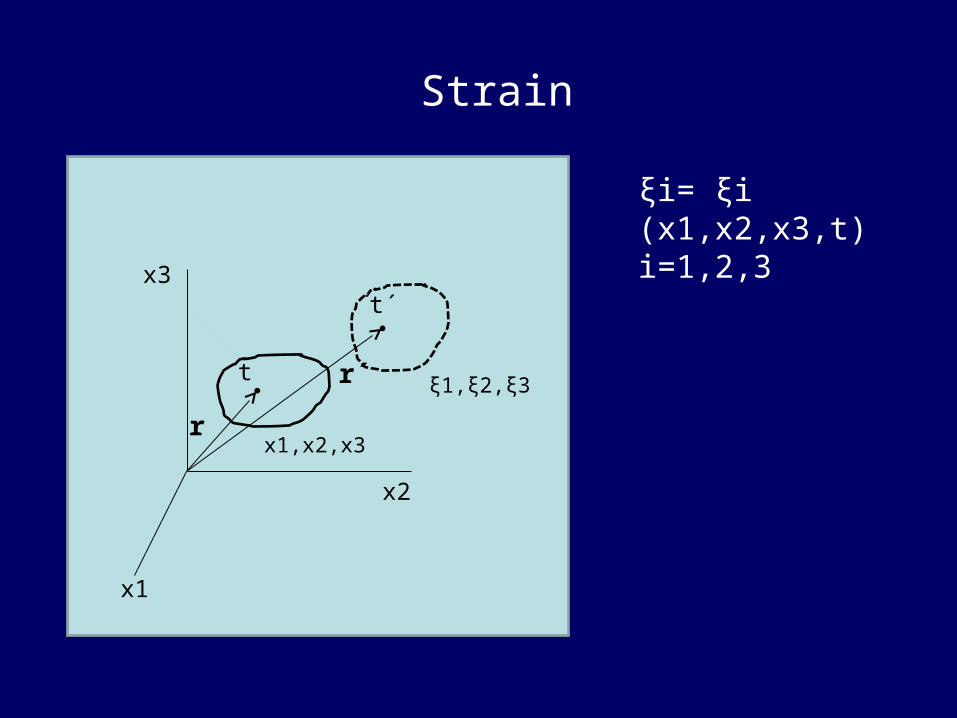
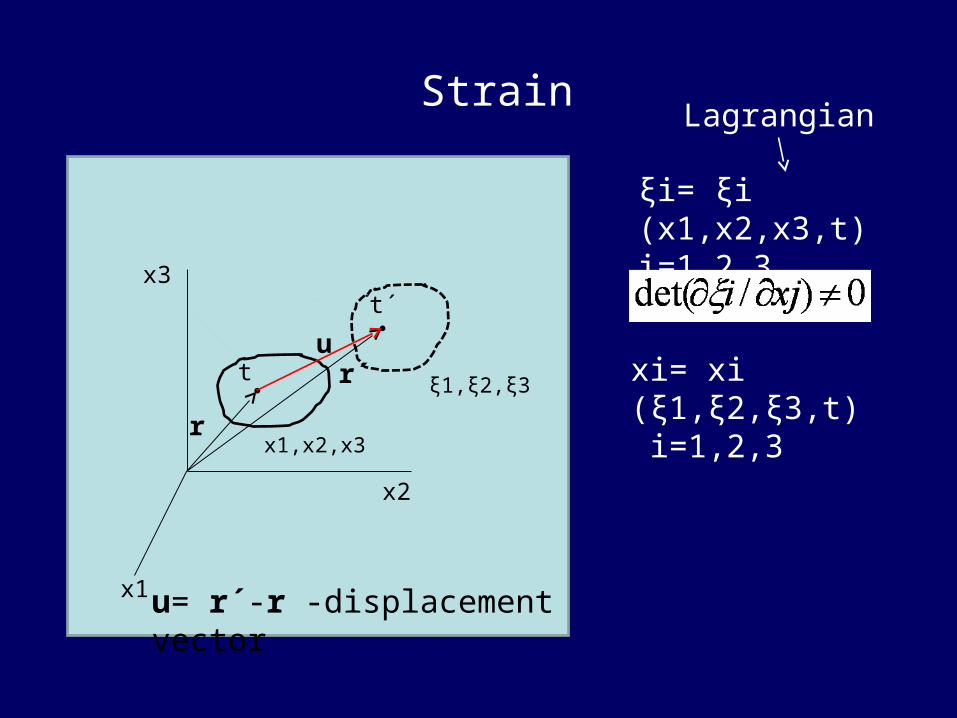
Strain
x1
x2
x3
t
t´
x1,x2,x3
ξ1,ξ2,ξ3
ξi= ξi (x1,x2,x3,t) i=1,2,3
r
r´
Strain
x1
x2
x3
t
t´
x1,x2,x3
ξ1,ξ2,ξ3
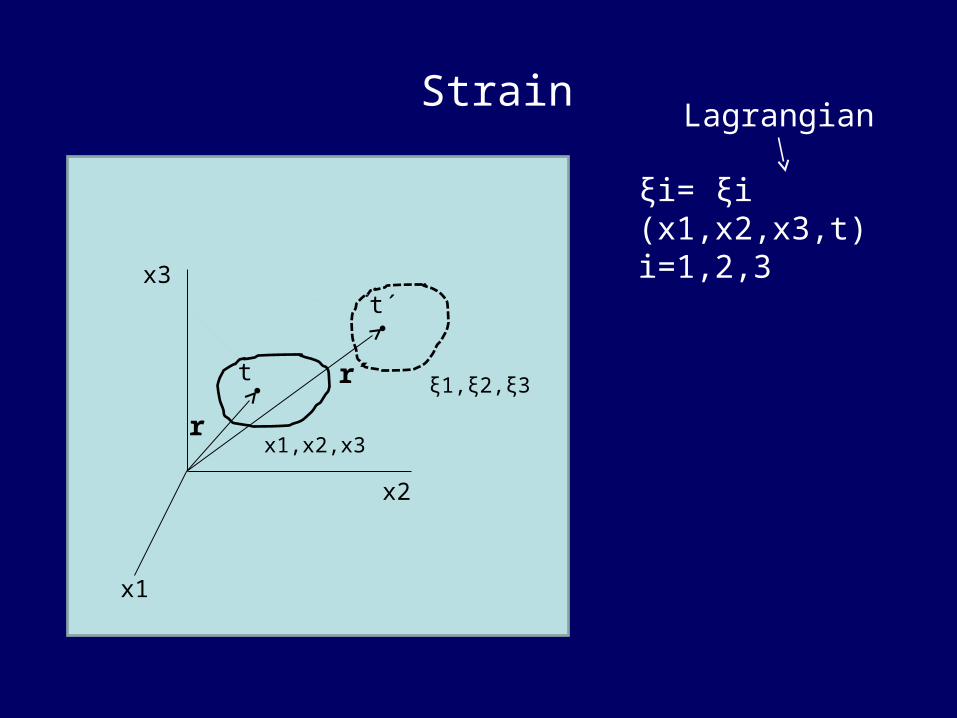
ξi= ξi (x1,x2,x3,t) i=1,2,3
Lagrangian
r
r´
Strain
x1
x2
x3
t
t´
x1,x2,x3
ξ1,ξ2,ξ3
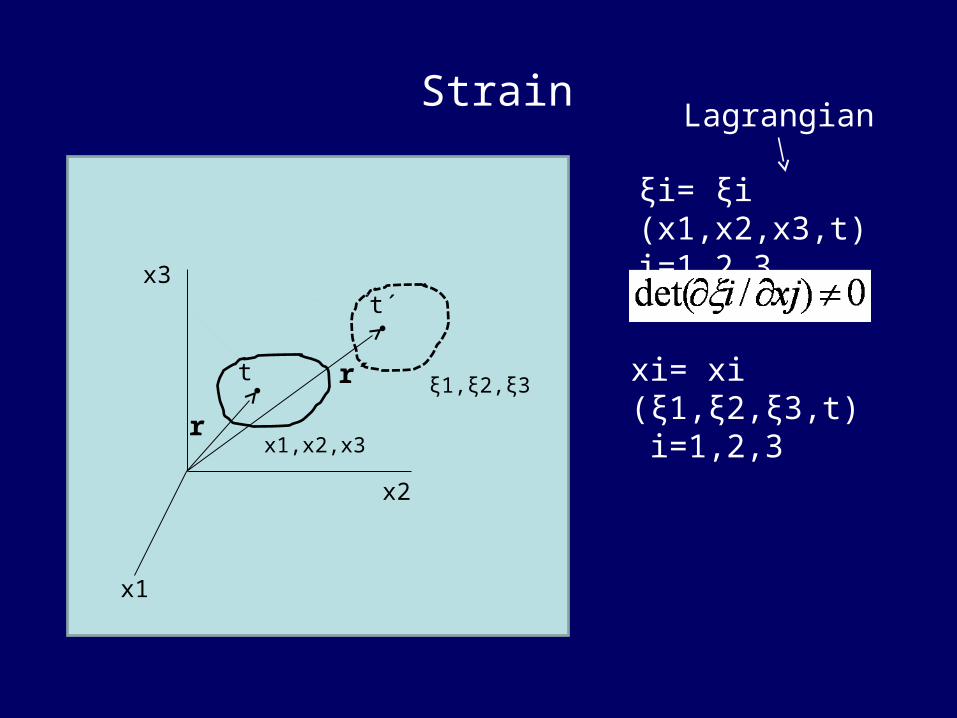
ξi= ξi (x1,x2,x3,t) i=1,2,3
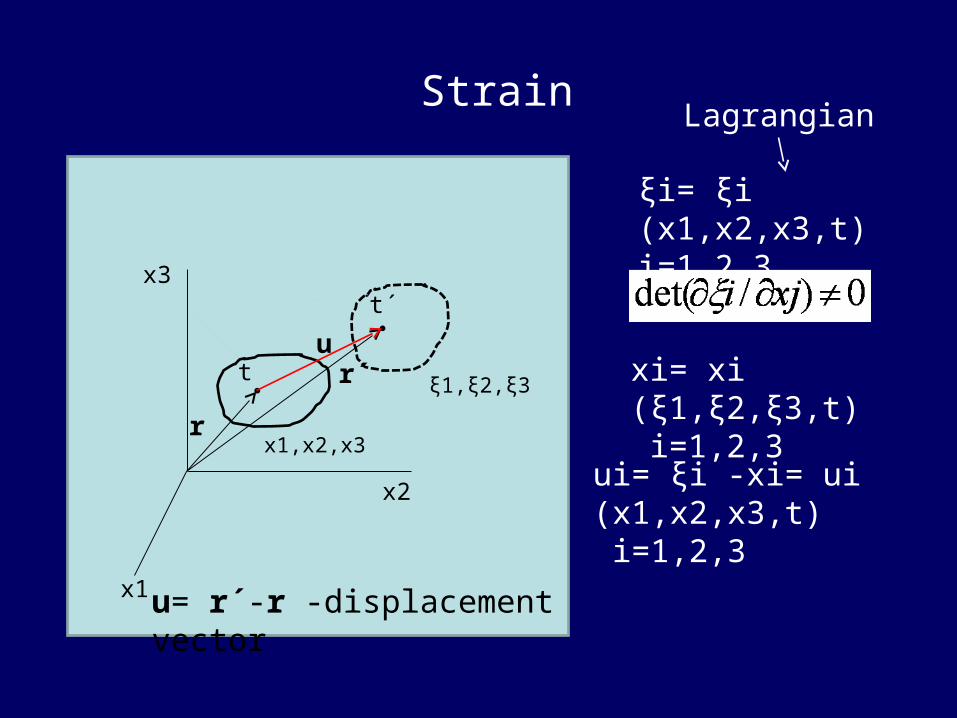
xi= xi (ξ1,ξ2,ξ3,t) i=1,2,3
Lagrangian
r
r´
Strain
x1
x2
x3
t
t´
x1,x2,x3
ξ1,ξ2,ξ3
ξi= ξi (x1,x2,x3,t) i=1,2,3
xi= xi (ξ1,ξ2,ξ3,t) i=1,2,3
Lagrangian
r
r´u
u= r´-r -displacement vector
Strain
x1
x2
x3
t
t´
x1,x2,x3
ξ1,ξ2,ξ3
ξi= ξi (x1,x2,x3,t) i=1,2,3
xi= xi (ξ1,ξ2,ξ3,t) i=1,2,3
Lagrangian
r
r´u
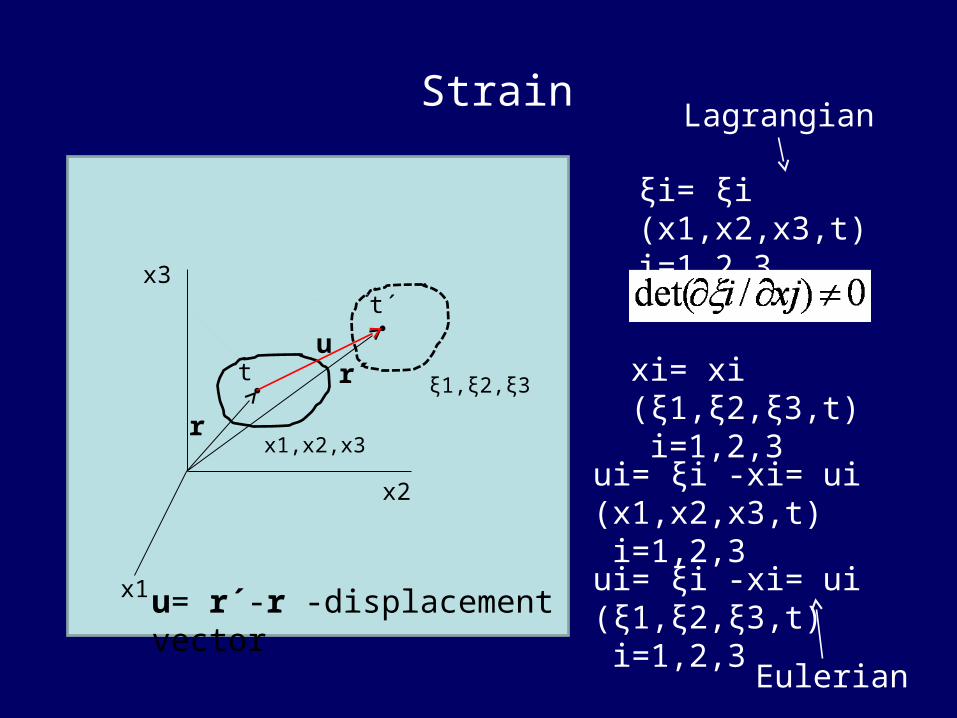
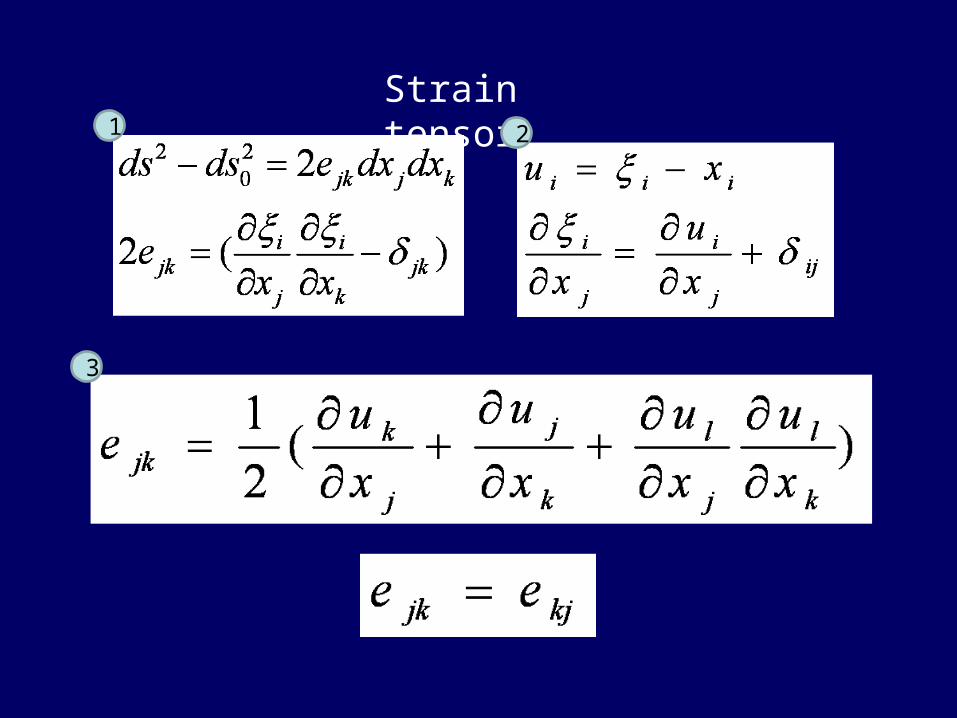
ui= ξi -xi= ui (x1,x2,x3,t) i=1,2,3
u= r´-r -displacement vector
Strain
x1
x2
x3
t
t´
x1,x2,x3
ξ1,ξ2,ξ3
ξi= ξi (x1,x2,x3,t) i=1,2,3
xi= xi (ξ1,ξ2,ξ3,t) i=1,2,3
Lagrangian
r
r´u
ui= ξi -xi= ui (x1,x2,x3,t) i=1,2,3
ui= ξi -xi= ui (ξ1,ξ2,ξ3,t) i=1,2,3u= r´-r -displacement vector
Eulerian
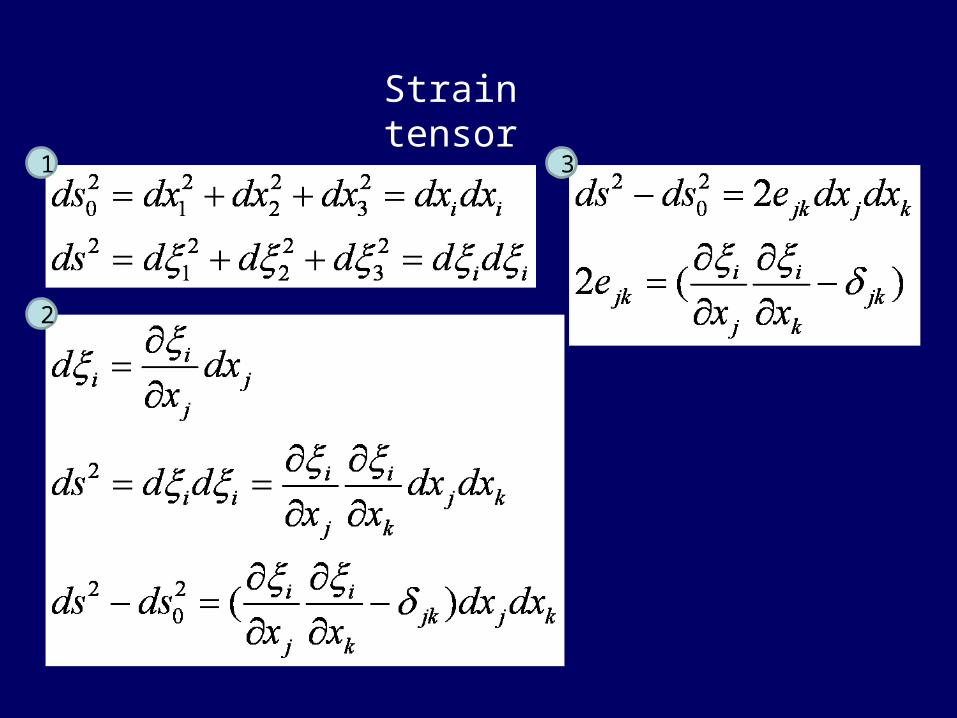
Strain tensor
1
2
3
Strain tensor1 2
3
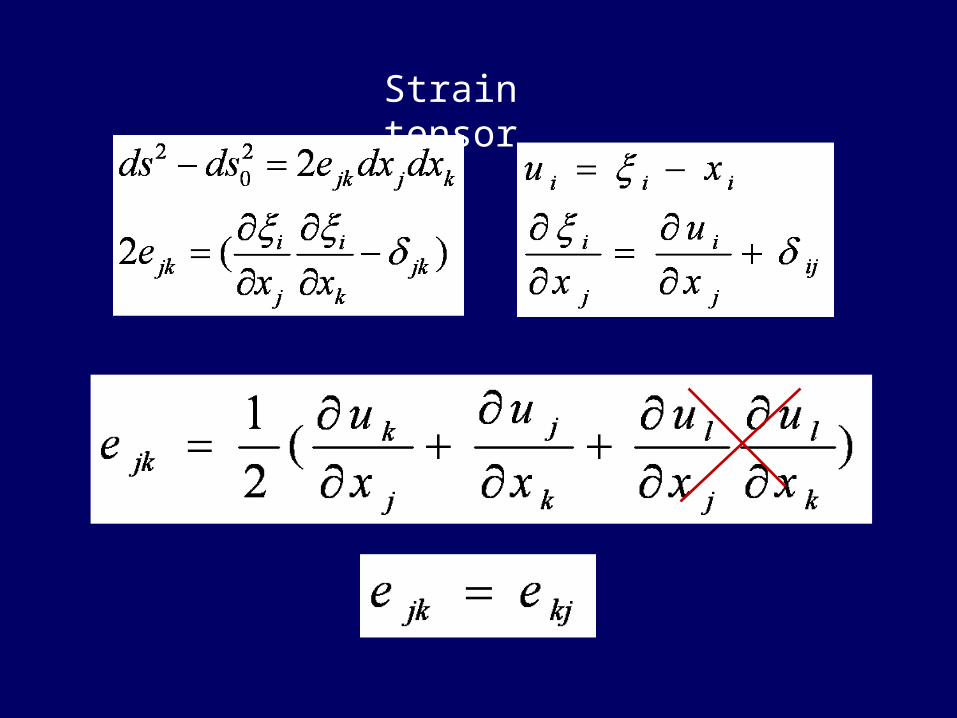
Strain tensor
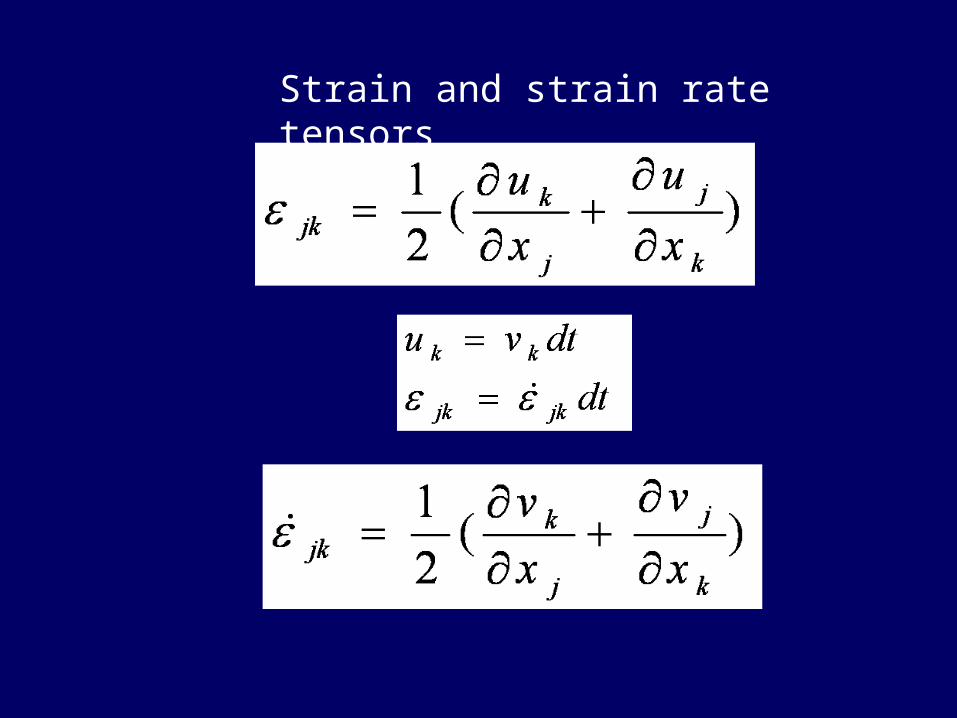
Strain and strain rate tensors
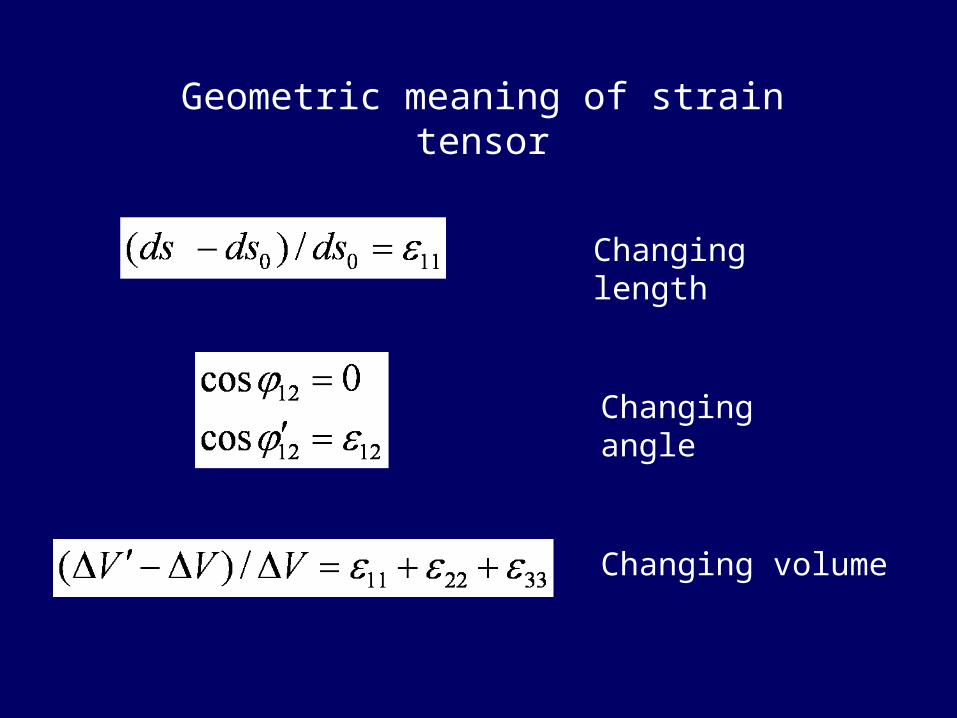
Geometric meaning of strain tensor
Changing length
Changing angle
Changing volume
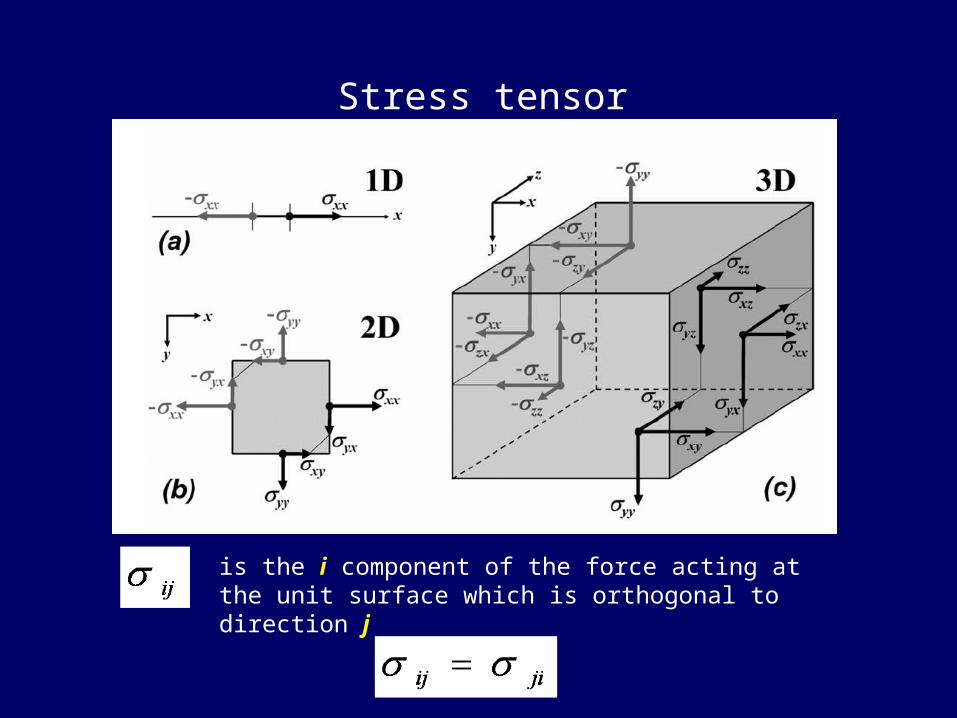
Stress tensor
is the i component of the force acting at the unit surface which is orthogonal to direction j
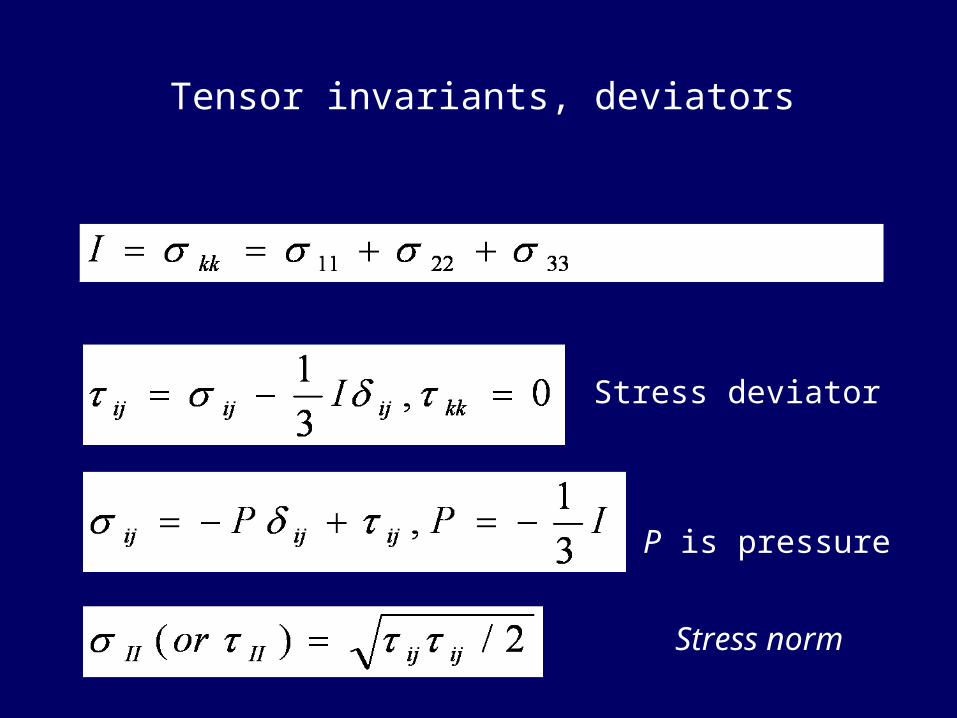
Tensor invariants, deviators
Stress deviator
P is pressure
Stress norm
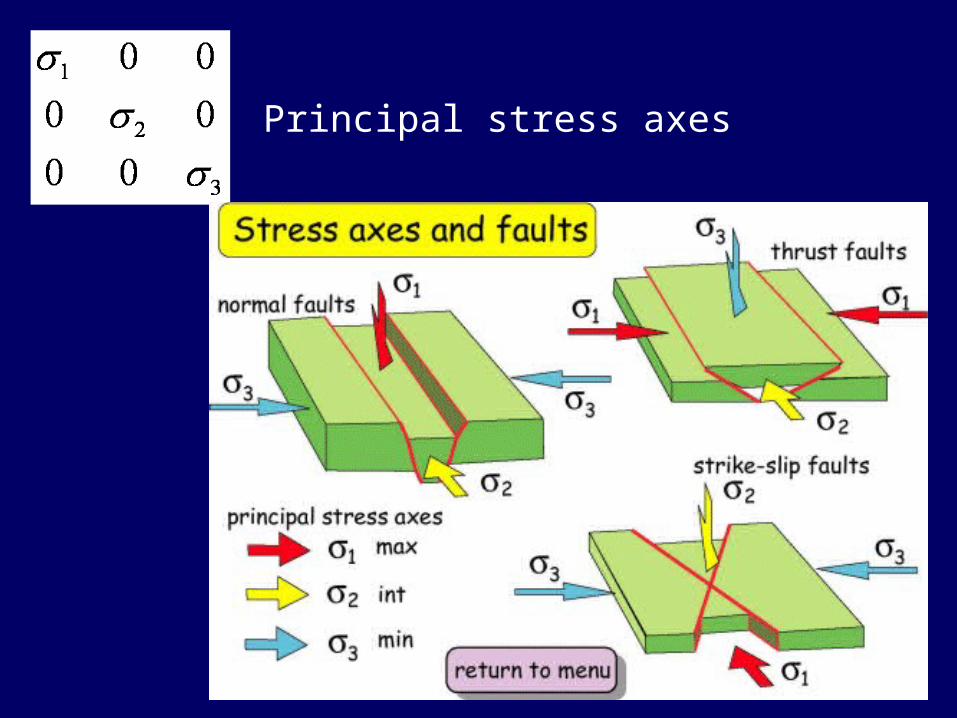
Principal stress axes
Physical grounds: conservation laws
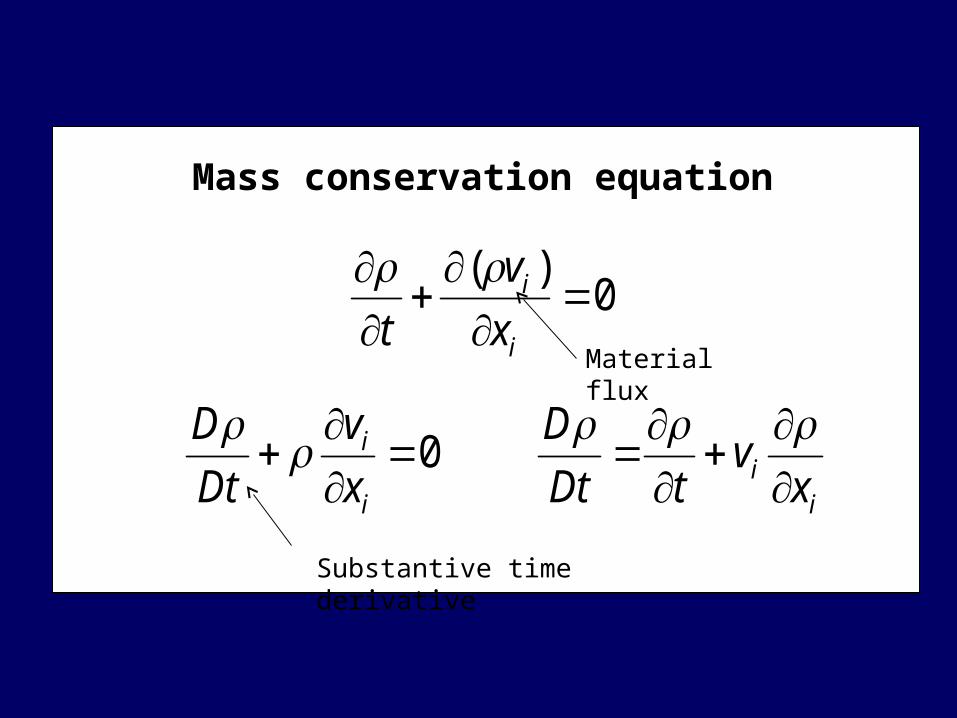
Mass conservation equation
Material flux
0)(
i
i
x
v
t
0
i
i
x
v
Dt
D
ii xv
tDt
D
Substantive time derivative
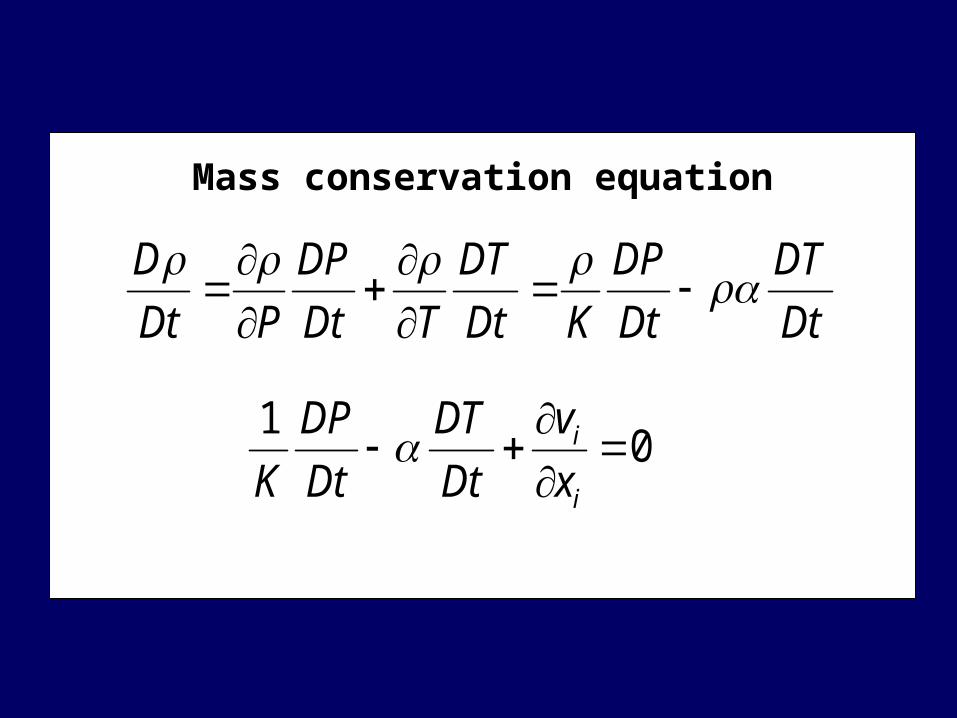
Mass conservation equation
01
i
i
x
v
Dt
DT
Dt
DP
K
Dt
DT
Dt
DP
KDt
DT
TDt
DP
PDt
D
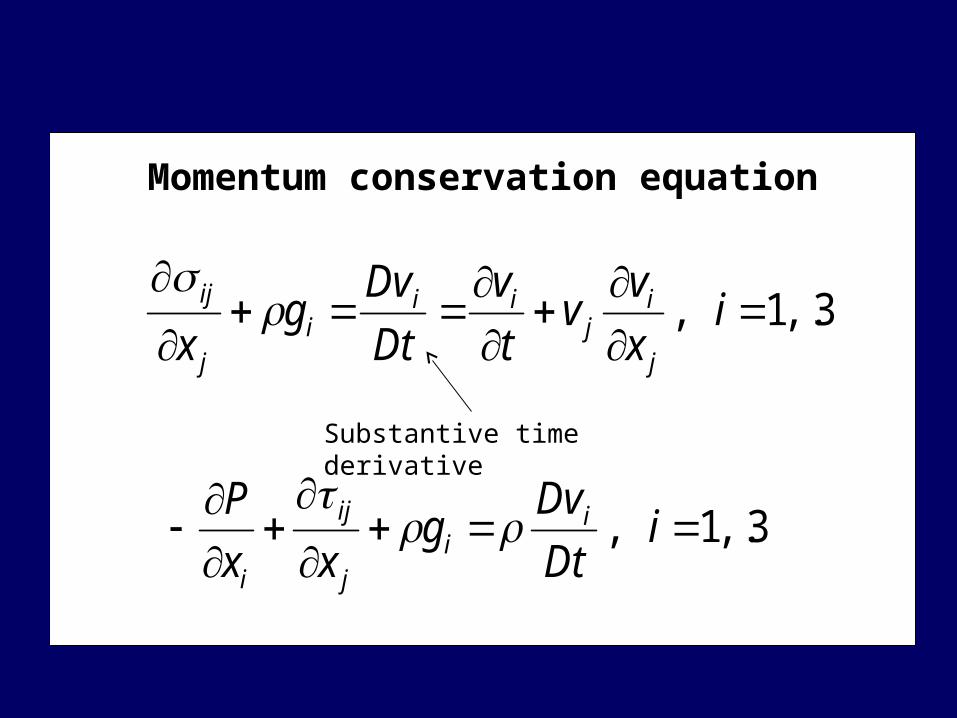
Momentum conservation equation
3,..1,
ix
vv
t
v
Dt
Dvg
x j
ij
iii
j
ij
3,..1,
iDt
Dvg
xx
P ii
j
ij
i
Substantive time derivative

Energy conservation equation
Substantive time derivative
chemijijii
p HAx
T
xDt
DTC
)(
Heat flux
Shear heating
)(2
1
i
j
j
iij x
v
x
v
Physical grounds: constitutive laws
RheologyRheology – the relationship between stress and strain
• Rheology for ideal bodies– Elastic– Viscous– Plastic
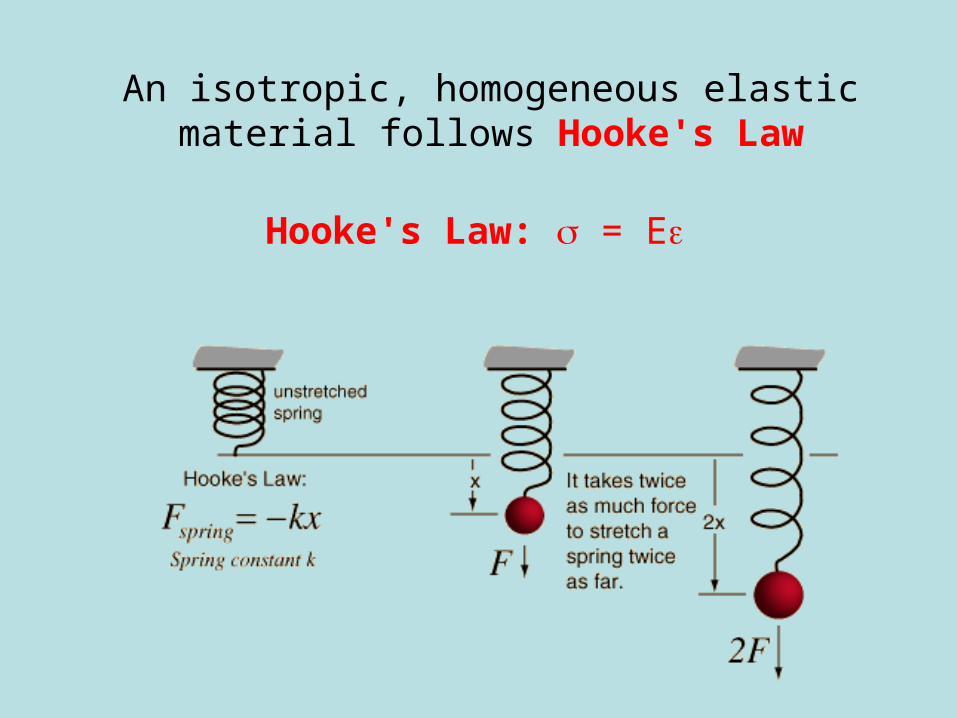
An isotropic, homogeneous elastic material follows Hooke's Law
Hooke's Law: = E
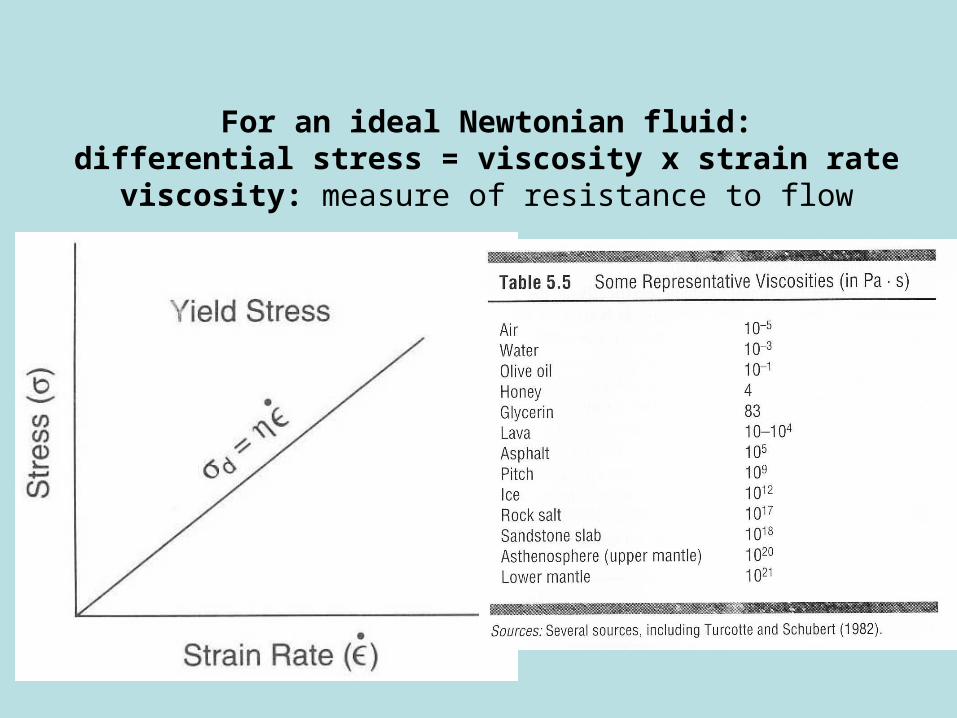
For an ideal Newtonian fluid:differential stress = viscosity x strain rate
viscosity: measure of resistance to flow
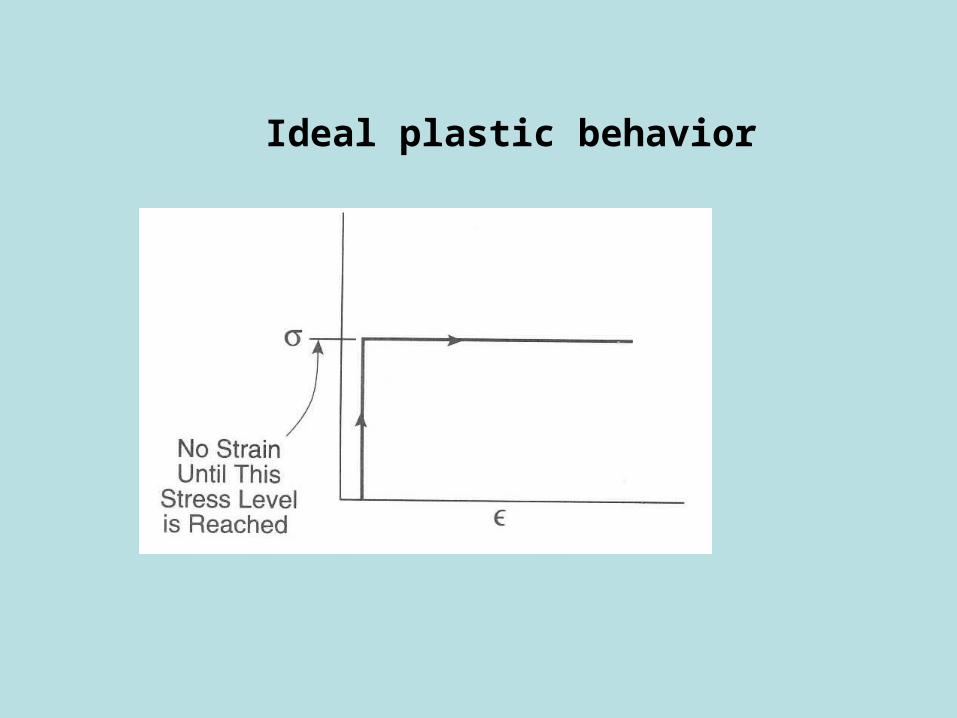
Ideal plastic behavior
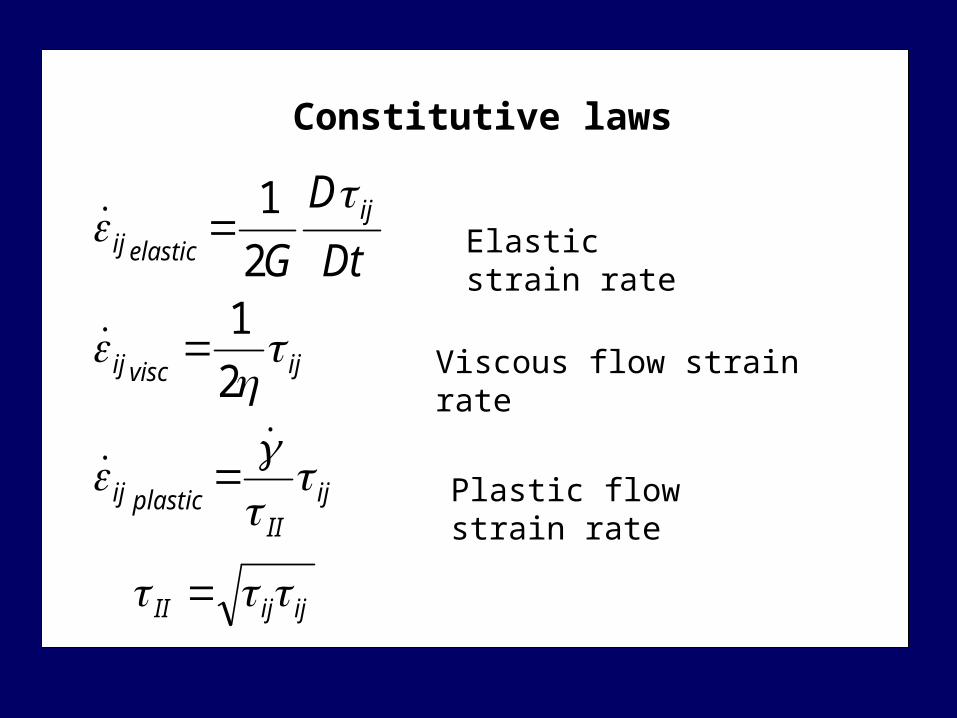
Constitutive laws
Dt
D
Gij
elasticij
2
1 Elastic strain rate
ijviscij
2
1 Viscous flow strain rate
ijII
plasticij
Plastic flow strain rate
ijijII
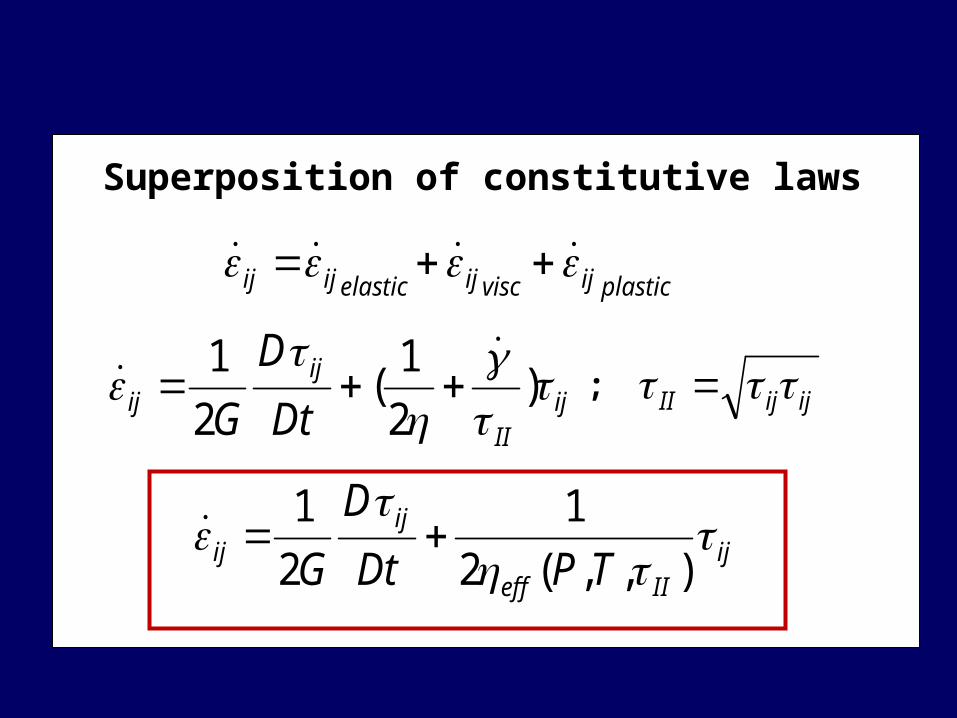
plasticijviscijelasticijij
Superposition of constitutive laws
ijII
ijij Dt
D
G
)2
1(
2
1
ijIIeff
ijij TPDt
D
G
),,(2
1
2
1
ijijII ;
chemijijii
p HAx
T
xDt
DTC
)(
ijIIeff
ij
i
j
j
iij TPDt
D
Gx
v
x
v
),,(2
1
2
1)(
2
1
Dt
Dvg
xx
P ii
j
ij
i
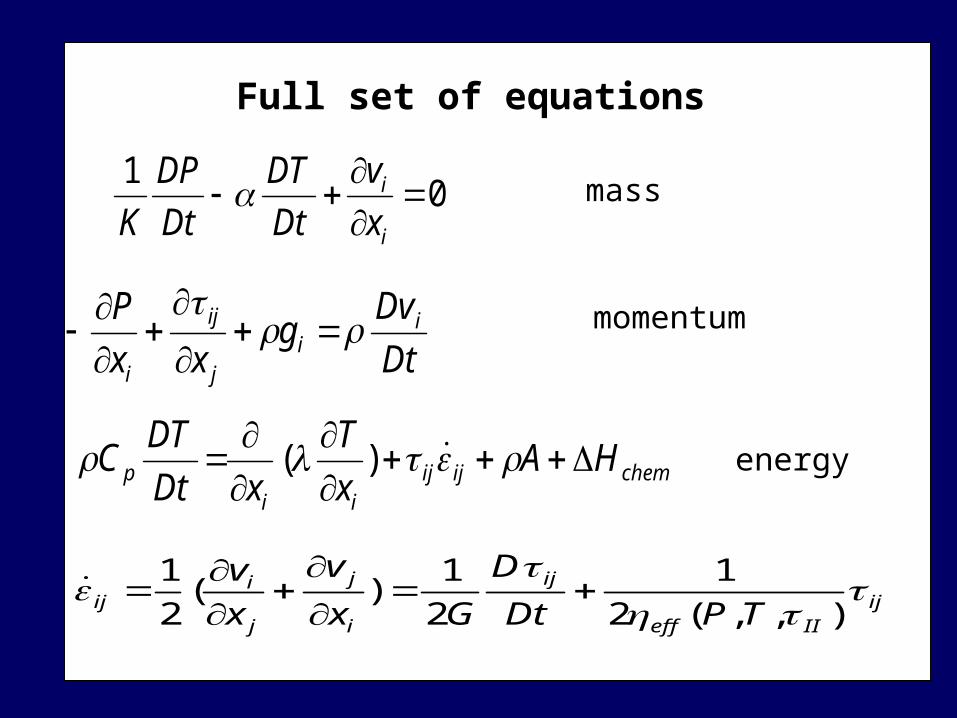
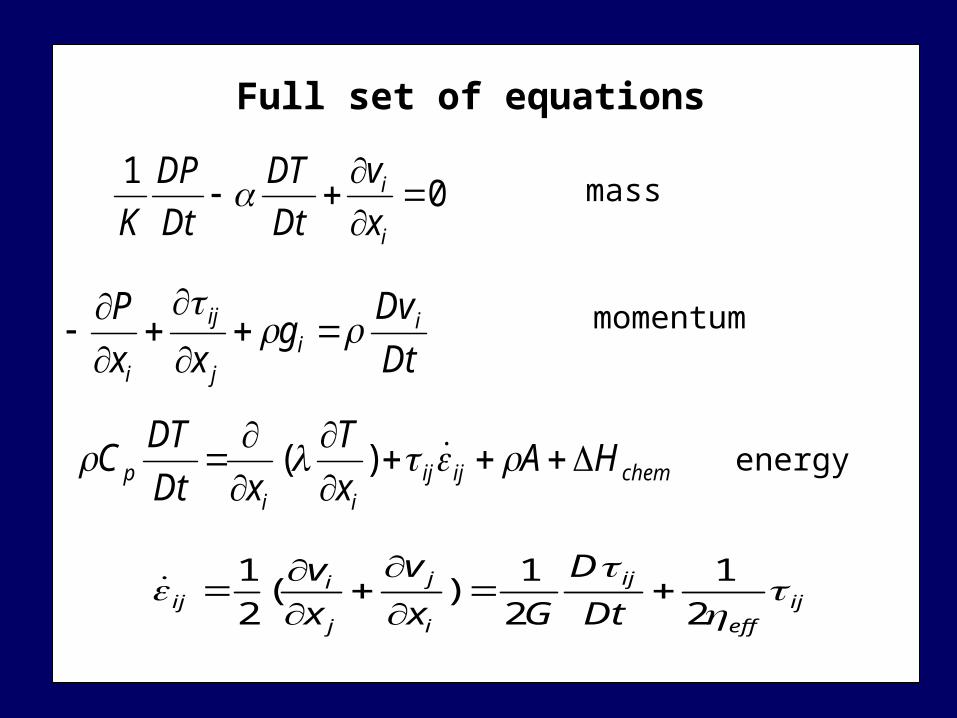
Full set of equations
mass
momentum
energy
01
i
i
x
v
Dt
DT
Dt
DP
K
How Does Rock Flow?
• Brittle – Low T, low P
• Ductile – as P, T increase
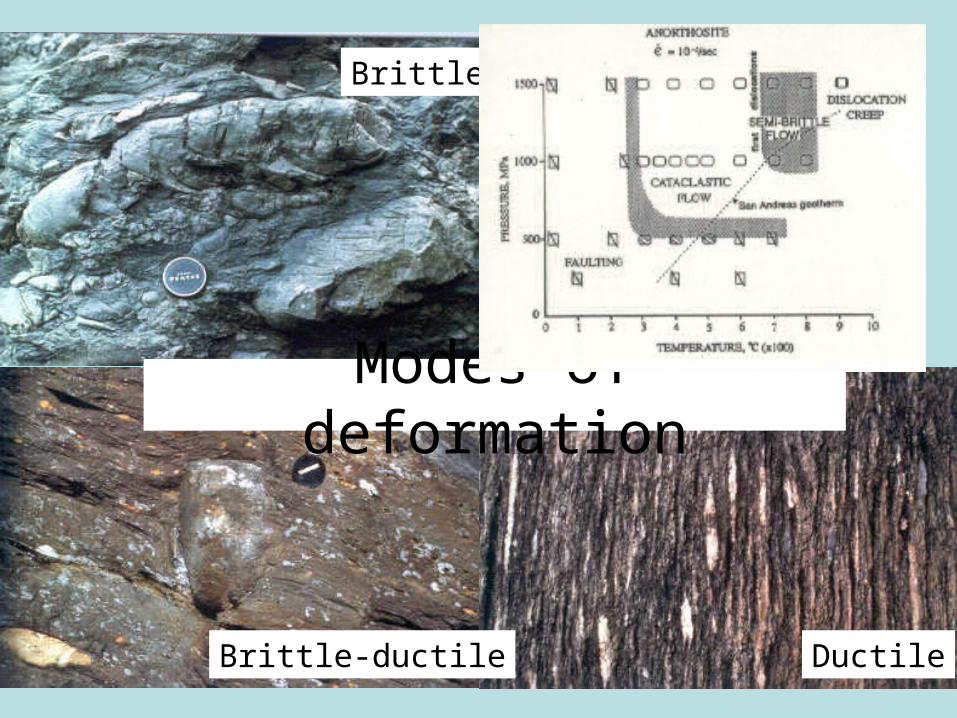
Brittle
Brittle-ductile Ductile
Modes of deformation
Deformation Mechanisms
• Brittle– Cataclasis
– Frictional grain-boundary sliding
• Ductile– Diffusion creep
– Power-law creep
– Peierls creep
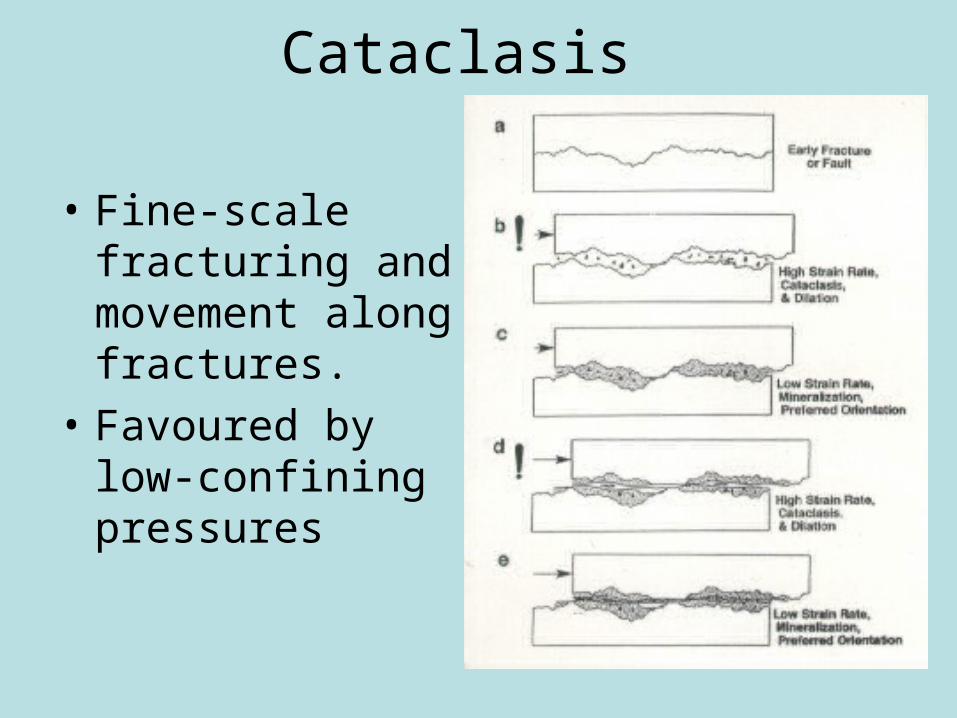
Cataclasis
• Fine-scale fracturing and movement along fractures.
• Favoured by low-confining pressures
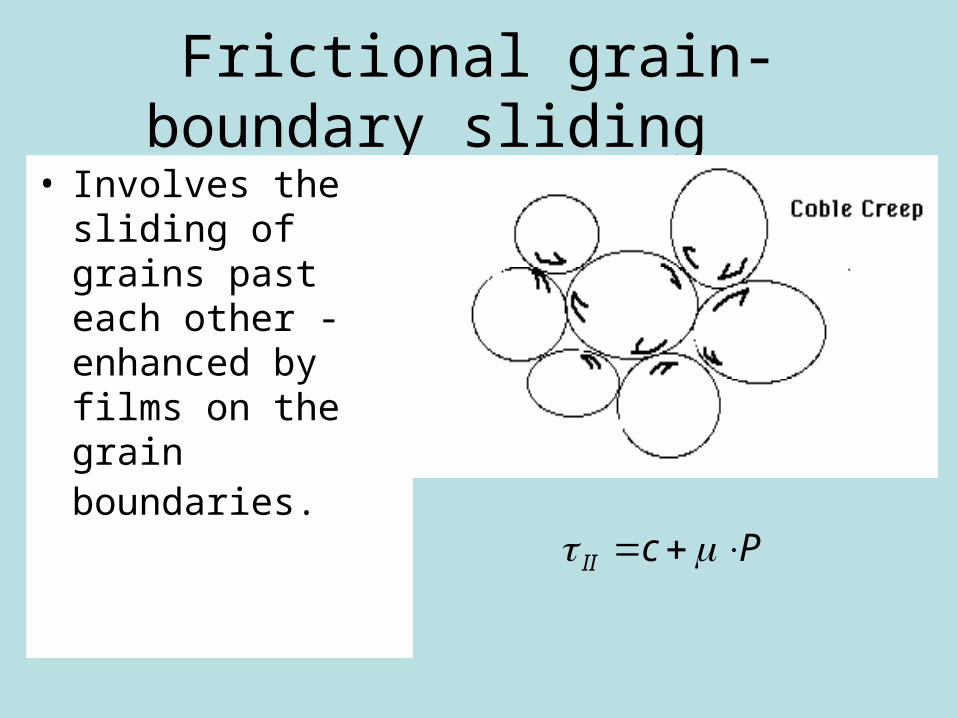
Frictional grain-boundary sliding
• Involves the sliding of grains past each other - enhanced by films on the grain boundaries.
PcII
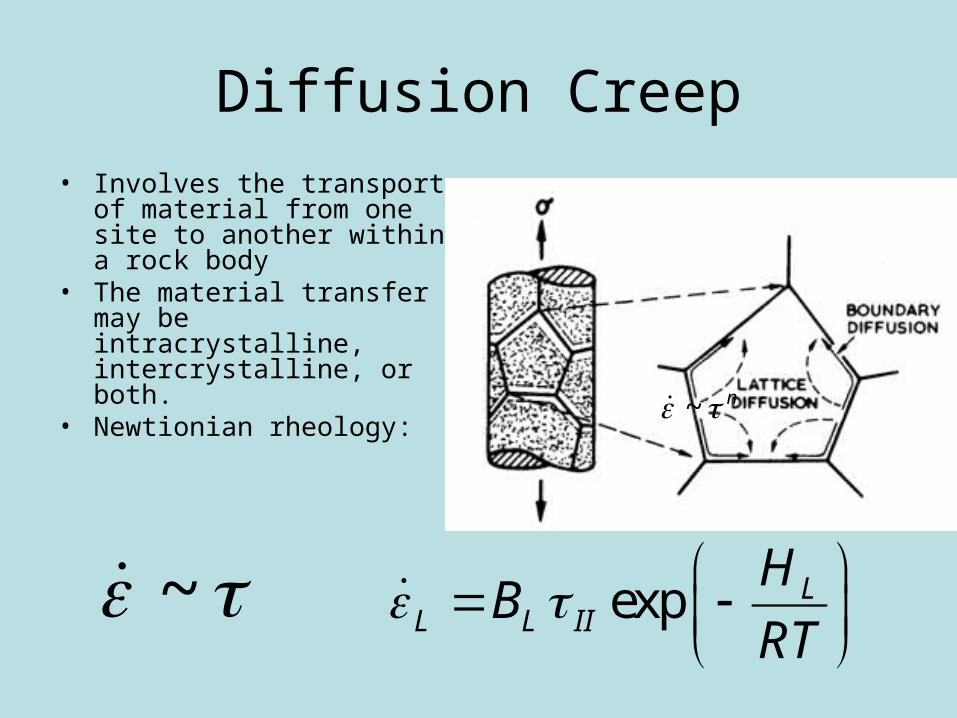
Diffusion Creep• Involves the transport of
material from one site to another within a rock body
• The material transfer may be intracrystalline, intercrystalline, or both.
• Newtionian rheology:
n ~
~ exp
LL L II
HB
RT
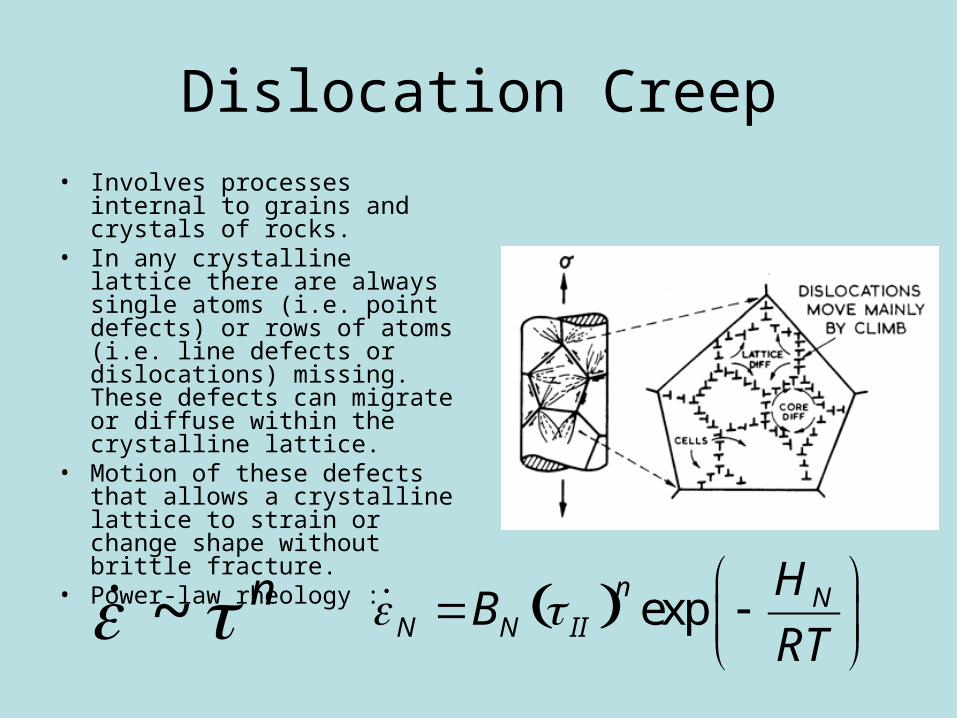
Dislocation Creep• Involves processes internal to
grains and crystals of rocks. • In any crystalline lattice there
are always single atoms (i.e. point defects) or rows of atoms (i.e. line defects or dislocations) missing. These defects can migrate or diffuse within the crystalline lattice.
• Motion of these defects that allows a crystalline lattice to strain or change shape without brittle fracture.
• Power-law rheology :
n ~ exp
n NN N II
HB
RT
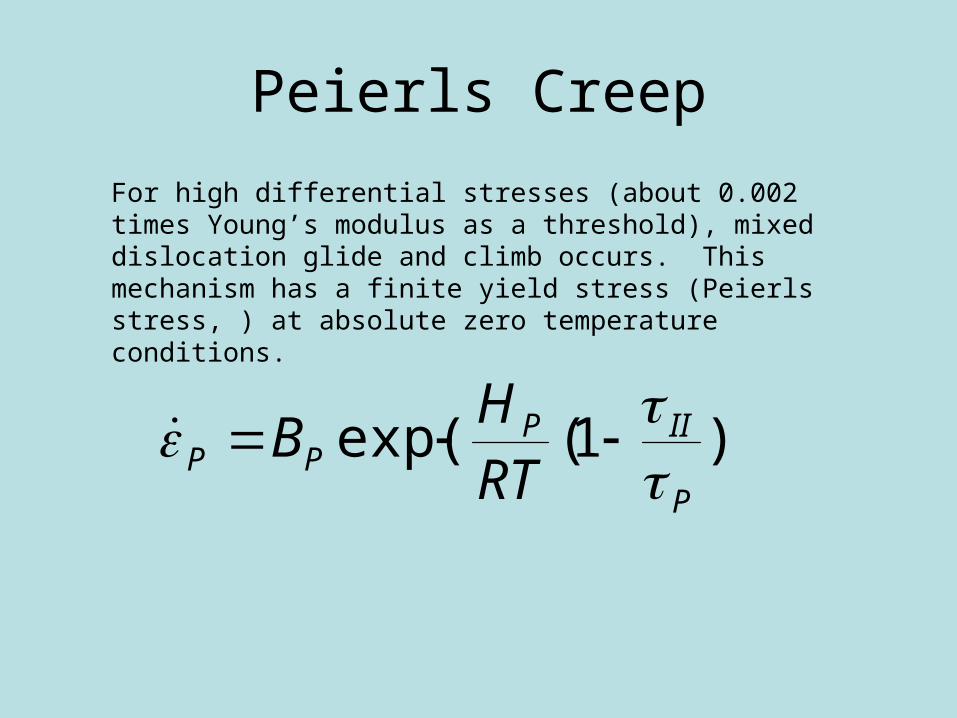
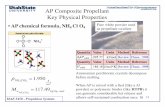
Peierls Creep
For high differential stresses (about 0.002 times Young’s modulus as a threshold), mixed dislocation glide and climb occurs. This mechanism has a finite yield stress (Peierls stress, ) at absolute zero temperature conditions.
))1(exp(P
IIPPP RT
HB
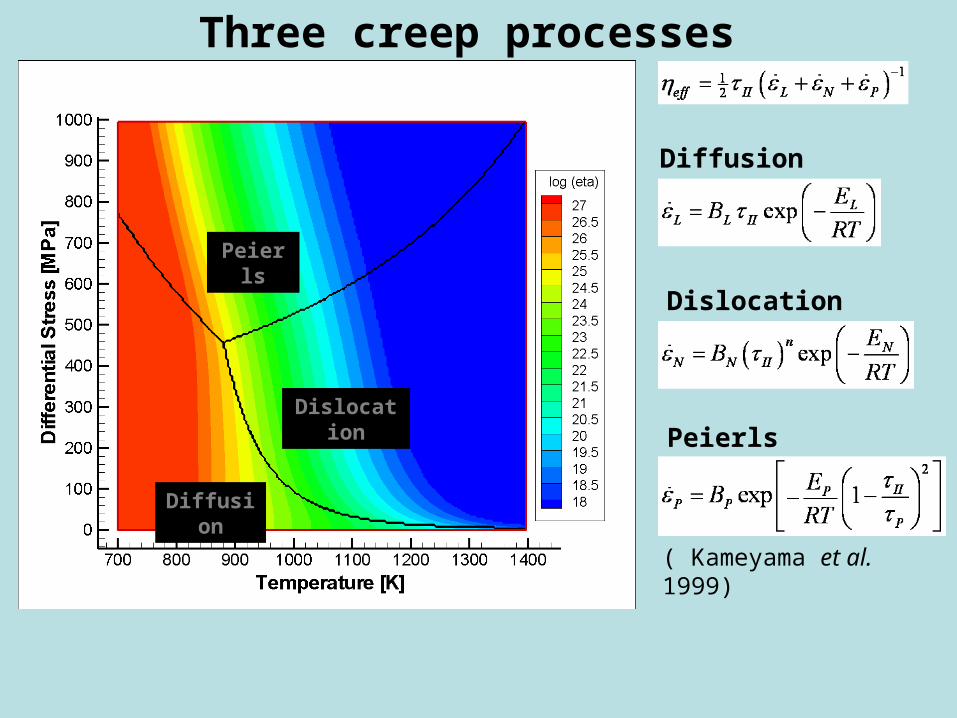
Dislocation
Diffusion
Peierls
Three creep processes
( Kameyama et al. 1999)
Diffusion creep
Dislocation creep
Peierls creep
chemijijii
p HAx
T
xDt
DTC
)(
ijeff
ij
i
j
j
iij Dt
D
Gx
v
x
v
2
1
2
1)(
2
1
Dt
Dvg
xx
P ii
j
ij
i
Full set of equations
mass
momentum
energy
01
i
i
x
v
Dt
DT
Dt
DP
K
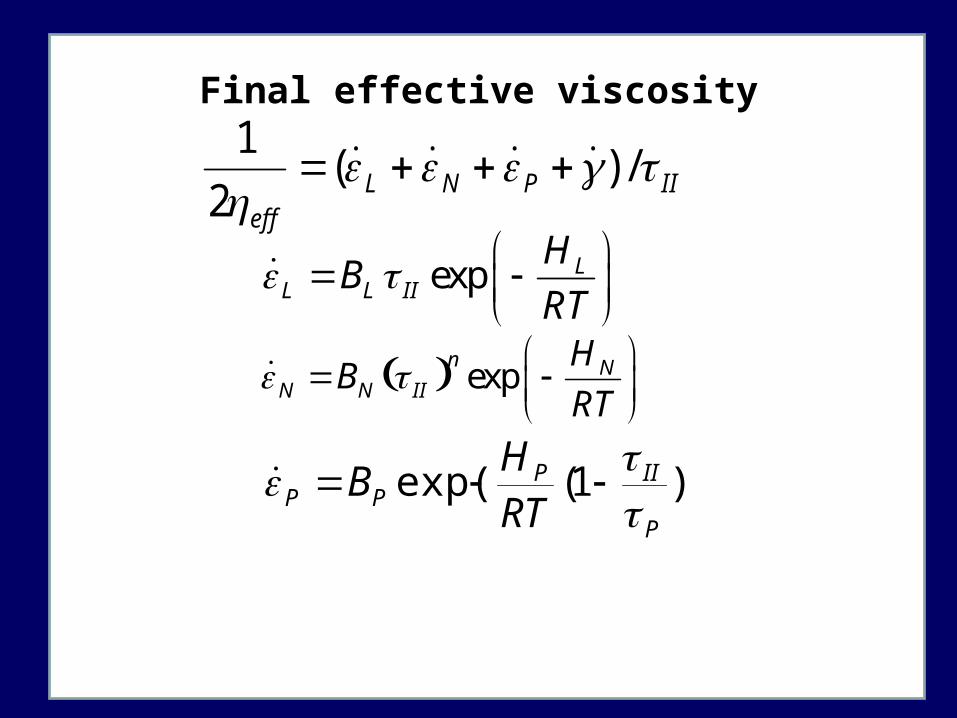
Final effective viscosity
IIPNLeff
/)(2
1
exp
LL L II
HB
RT
exp
n NN N II
HB
RT
))1(exp(P
IIPPP RT
HB
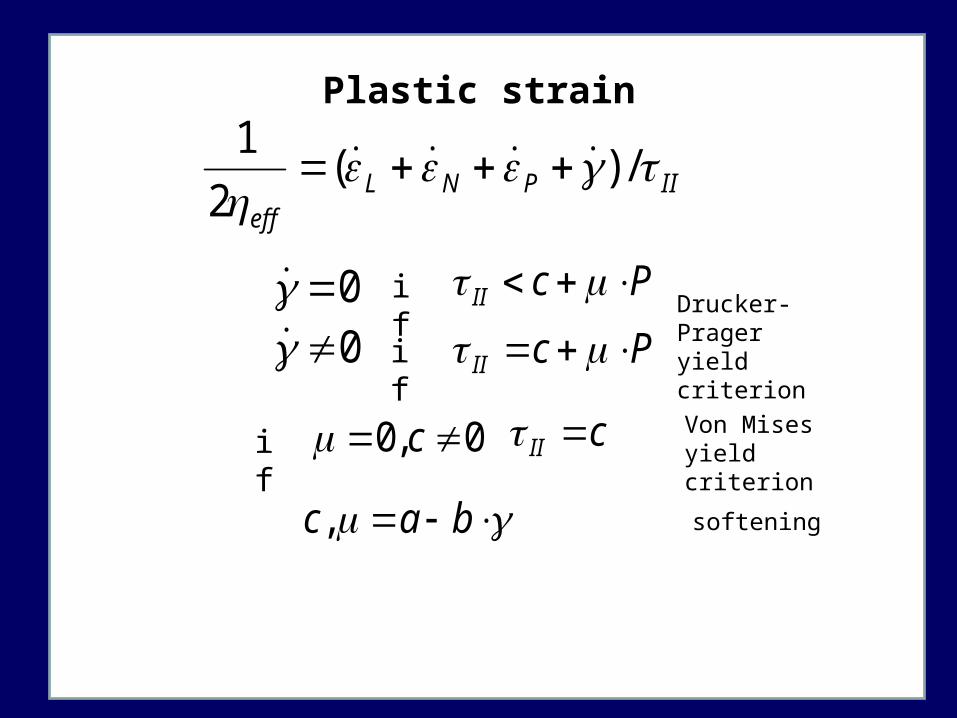
Plastic strain
IIPNLeff
/)(2
1
PcII 0 if
0 PcII if
if 0,0 c cII Von Mises yield criterion
Drucker-Prager yield criterion
bac, softening
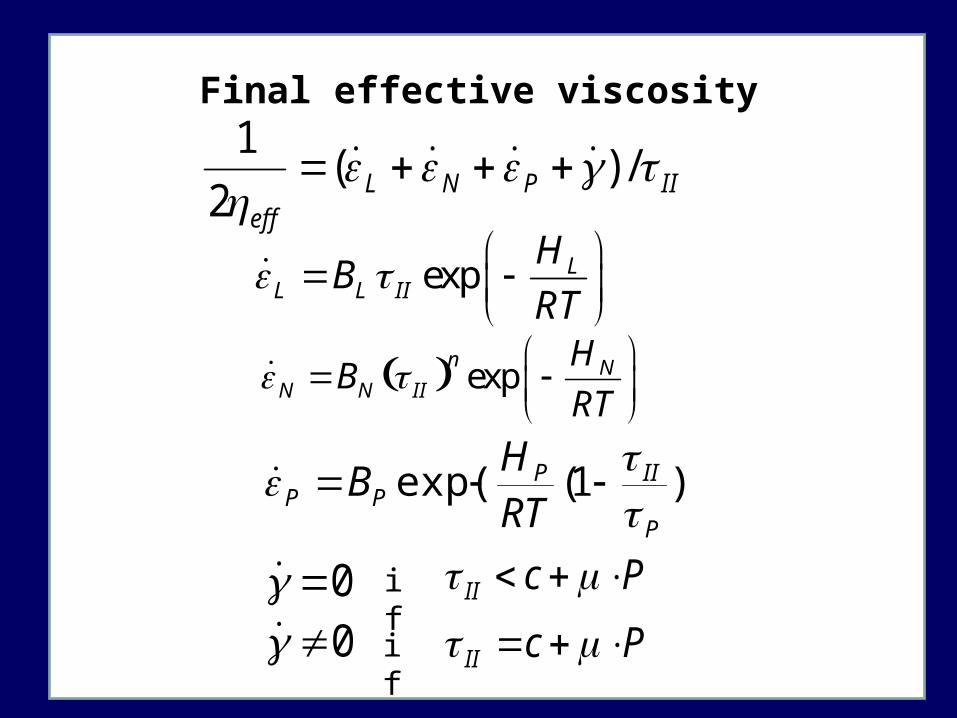
Final effective viscosity
IIPNLeff
/)(2
1
exp
LL L II
HB
RT
exp
n NN N II
HB
RT
))1(exp(P
IIPPP RT
HB
PcII 0 if
0 PcII if
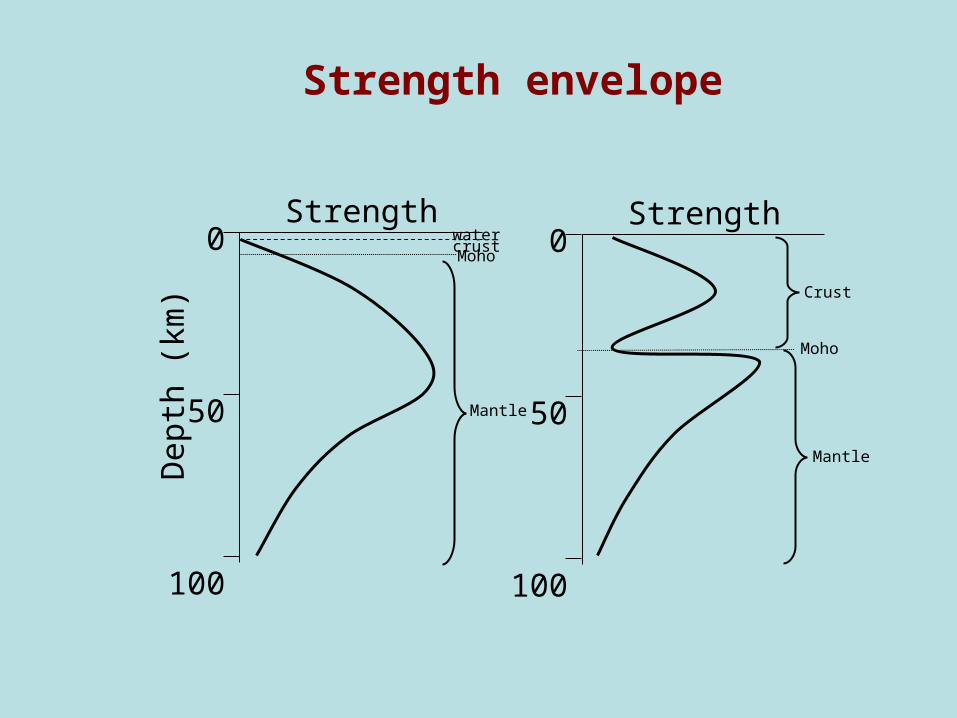
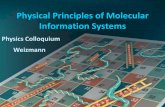
Strength envelope
0
50
100
StrengthD
epth
(km
)
watercrustMoho
Mantle
0
50
100
Strength
Moho
Mantle
Crust