ISEL/DEC Física Aplicada à Engenharia Civil I · PDF fileISEL/DEC Física...
79
ISEL/DEC Física Aplicada à Engenharia Civil I Alexandra Afilhado e Pedro Silva 1 Folhas de apoio - versão 03-2003 Física Aplicada à Engenharia Civil I Introdução Grandezas Físicas Existem cinco grandezas fundamentais no Sistema Internacional (SI): • comprimento (L) • massa (M) • tempo (T) • corrente eléctrica (I) • temperatura (Θ) Sistemas de unidades • Sistema Internacional de Unidades - SI (o mais usado em física): o Comprimento: metro (m) o massa: quilograma (kg) o tempo: segundo (s) o Temperatura: Kelvin (K) o Corrente Eléctrica: Ampere (A) Este sistema é também conhecido por sistema mks devido a m eter- kilogram- s econd. • Sistema Gaussiano (usado principalmente em química): o comprimento: centimetro (cm) o massa: grama (g) o tempo: segundo (s) Este sistema é frequentemente referido como sistema cgs devido a centimeter- gram- s econd. • Sistema Britânico de Engenharia: o Comprimento: pé (ft) o massa: slug o tempo: segundo (s) Notação Científica Por vezes é conveniente expressar números pequenos ou grandes em notação científica. Por exemplo: 5,000 = 5 x 10 3 e 0.0004 = 4 x 10 - 4 . Os prefixos comuns mais usados são apresentados como potências de 10 e estão apresentados na tabela seguinte.
Transcript of ISEL/DEC Física Aplicada à Engenharia Civil I · PDF fileISEL/DEC Física...
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 1 Folhas de apoio - versão 03-2003
Física Aplicada à Engenharia Civil I
Introdução
Grandezas Físicas
Existem cinco grandezas fundamentais no Sistema Internacional (SI):
• comprimento (L) • massa (M) • tempo (T) • corrente eléctrica (I) • temperatura (Θ)
Sistemas de unidades
• Sistema Internacional de Unidades - SI (o mais usado em física): o Comprimento: metro (m) o massa: quilograma (kg) o tempo: segundo (s) o Temperatura: Kelvin (K) o Corrente Eléctrica: Ampere (A)
Este sistema é também conhecido por sistema mks devido a meter-kilogram-second.
• Sistema Gaussiano (usado principalmente em química): o comprimento: centimetro (cm) o massa: grama (g) o tempo: segundo (s)
Este sistema é frequentemente referido como sistema cgs devido a centimeter-gram-second.
• Sistema Britânico de Engenharia: o Comprimento: pé (ft) o massa: slug o tempo: segundo (s)
Notação Científica Por vezes é conveniente expressar números pequenos ou grandes em notação científica. Por exemplo: 5,000 = 5 x 103 e 0.0004 = 4 x 10- 4.
Os prefixos comuns mais usados são apresentados como potências de 10 e estão apresentados na tabela seguinte.
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 2 Folhas de apoio - versão 03-2003
Tabela. Prefixos usados com o sistema métrico de unidades.
Potência Prefixo Abreviatura
10- 9 nano N
10- 6 micro
10- 3 milli M
10- 2 centi C
10- 1 deci D
103 kilo K
106 Mega M
Por exemplo:
a) 60.000 m = 6,0000 x 104 m = 60,000 km b) 0,003 s = 3 x 10- 3 s = 3 ms
Análise dimensional
A análise dimensional refere-se à natureza qualitativa da quantidade física (comprimento, massa, tempo). Os parentesis rectos denotam a dimensão ou unidades de uma quantidade física (verificar tabela seguinte):
Tabela: Dimensões
Quantidade dimensão Unidades SI
Área [A] = L 2 m 2
Volume [V]=L 3 m 3
Velocidade [v] = L/T m/s
Aceleração [a] = L/T2 m/s 2
Massa [m] = M kg
Observação: A análise dimensional pode ser usada para a obtenção ou verificação de fórmulas usando as dimensões como quantidades algébricas. Apenas se podem somar ou subtrair quantidades que possuam a mesma dimensão. As quantidades em dois membros de uma equação terão de ter a mesma dimensão.
Nota: A análise dimensional não fornece factores numéricos. Por exemplo: a distância (x) percorrida por um carro num determinado tempo (t), partindo do repouso com aceleração constante (a) é dado por: x = (1/2)at 2. Esta equação pode ser verificada através de análise dimensional:
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 3 Folhas de apoio - versão 03-2003
m.e. [x] = L
m.d. (1/2)at2 = (1/2) [a][t 2] = (L/T2) T 2 = L.
Desde que a dimensão do membro esquerdo (m.e.) da equação seja a mesma que a apresentada no membro direito (m.d.) da equação, a equação é dita, dimensionalmente homogénea.
Conversão de Unidades
Observação: As unidades podem ser utilizadas como quantidades algébricas. Por exemplo, podemos utilizar o factor de conversão 1 in = 2.54 cm para reescrever 15 polegadas em centimetros.
15 in = 15 in (2.54 cm / 1 in) = 38.1 cm
Notação Matemática 1. - proporcional a 2. < ou > - menor ou maior que 3. << ou >> - muito menor ou muito maior que 4. - aproximadamenrte igual a 5. - definido como 6. x – variação da quantidade x 7. - somatório 8. |x| - valor absoluto de x 9. ∃ - Existe 10. ⇒ - implica que 11. ⇔ - equivalente a 12. = - igual a
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 4 Folhas de apoio - versão 03-2003
P(xo,y0)
Y
Y0
X X0 0
P(r,θ)
Y
X 0
r
θ
Sistemas de Coordenadas
A localização de um ponto numa linha pode ser descrito por uma coordenada; um ponto num plano pode ser descrito por duas coordenadas; um ponto num volume tridimensional pode ser descrito por três coordenadas. Em geral o número de coordenadas iguala o número de dimensões do espaço. Um sistema de coordenadas consiste em:
1. um ponto de referência fixo (origem) 2. uma série de eixos com direcções e escalas especificadas 3. instruções que especifiquem como caracterizar um ponto no espaço relativo à
origem e eixos.
Sistemas de coordenadas no plano
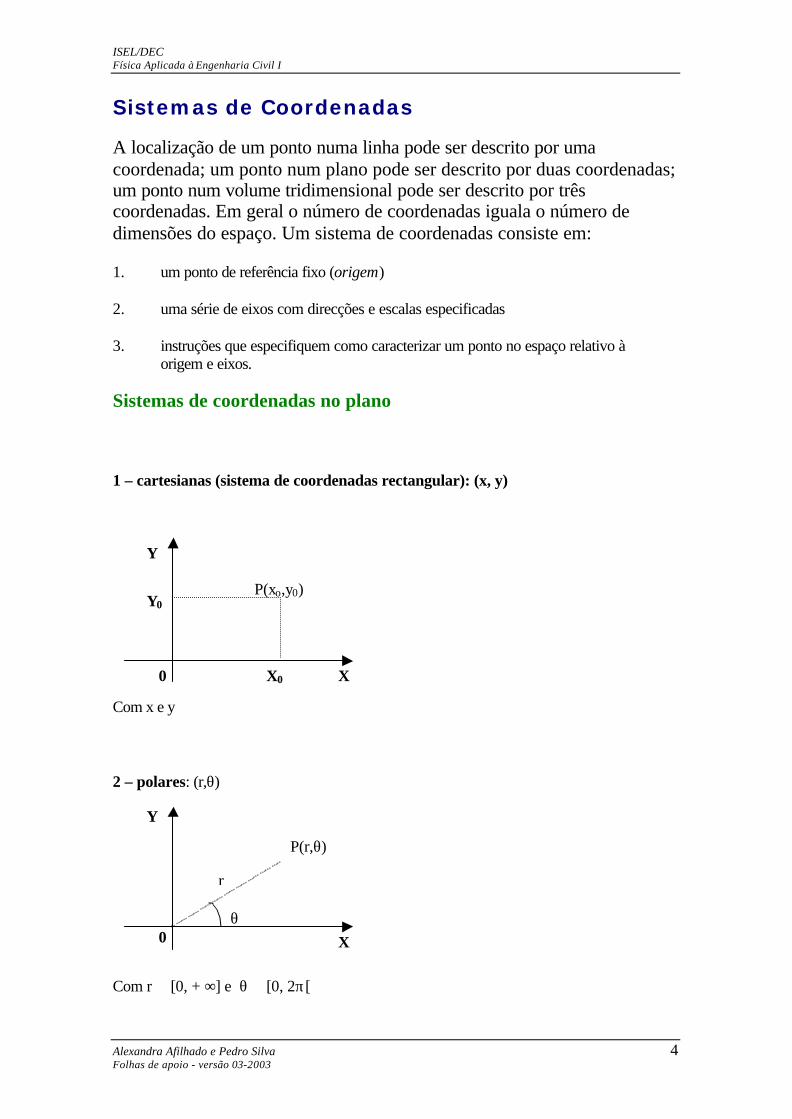
1 – cartesianas (sistema de coordenadas rectangular): (x, y)
Com x e y ∈ ℜ
2 – polares: (r,θ)
Com r ∈ [0, + ∞] e θ ∈ [0, 2π[

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 5 Folhas de apoio - versão 03-2003
P(x,y,z)
P’(x,y,0)
P’ (r, θ, 0)
P(r, θ, z)
As coordenadas cilindricas (r, θ) de um ponto (x,y), são definidas por, x = r cos θ y = r sen θ
e com relações inversas dadas por,
r = (x2 + y2)1/2 θ = arctg (y/x)
Sistemas de coordenadas no espaço
§ Sistemas de coordenadas cartesianas (x, y, z).
P’ é a projecção de P no plano XOY
kzjyixOPOPrrr
++=−= Com x, y e z ∈ ℜ
§ Sistema de coordenadas cilindricas: (r, θθ , z)
kzerOP r
rr+=
Com r ∈ [0, + ∞[, θ ∈ [0, 2π[ e z ∈ ℜ
y
x
z
O
ir
kr
jr
y
x
z
O
kr
rer
èer
r θ
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 6 Folhas de apoio - versão 03-2003
As coordenadas cilindricas (r, θ, z) de um ponto (x,y,z), são definidas por,
x = r cos θ y = r sin θ z = z
e inversamente,
r = (x2 + y2)1/2 θ = arctg (y/x)
z = z
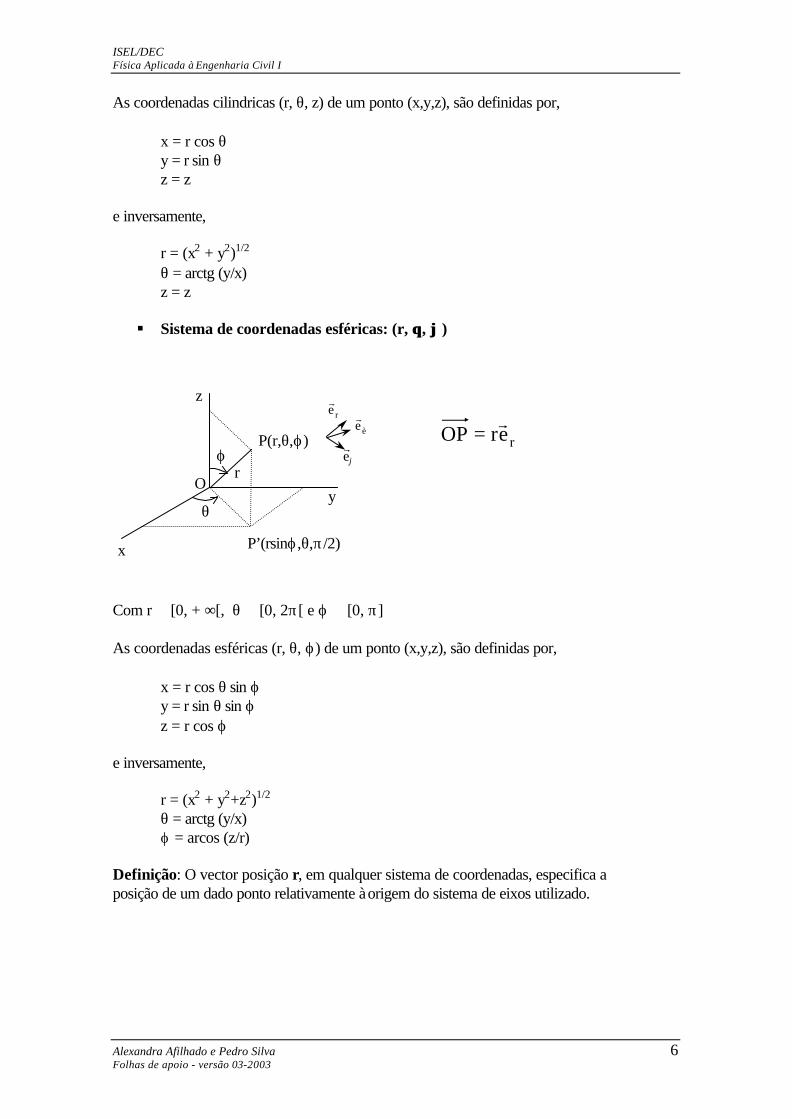
§ Sistema de coordenadas esféricas: (r, θθ , ϕϕ )
rerOPr
=
Com r ∈ [0, + ∞[, θ ∈ [0, 2π[ e ϕ ∈ [0, π] As coordenadas esféricas (r, θ, ϕ) de um ponto (x,y,z), são definidas por,
x = r cos θ sin ϕ y = r sin θ sin ϕ z = r cos ϕ
e inversamente,
r = (x2 + y2+z2)1/2 θ = arctg (y/x)
ϕ = arcos (z/r)
Definição: O vector posição r, em qualquer sistema de coordenadas, especifica a posição de um dado ponto relativamente à origem do sistema de eixos utilizado.
P(r,θ,ϕ)
y
x
z
O
P’(rsinϕ,θ,π/2)
r
θ
ϕ ϕer
èerre
r
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 7 Folhas de apoio - versão 03-2003
Conceitos matemáticos necessários
1. Operações com vectores
a) Adição de vectores CBArrr
+=
Notação: 333222111 e)C(Be)C(Be)C(BArrrr
+++++= Exemplo: calculo da força resultante
b) Produto de um vector por um escalar: BbArr
=
Notação: 332211 ebAebAebAArrrr
++=
Exemplo: cálculo da força efectiva, quantidade de movimento
c) Produto interno: C|Barr
=
Notação: 332211 CBCBCBa ++=
Exemplo: determinação da componente de uma força numa dada direcção, cálculo do trabalho
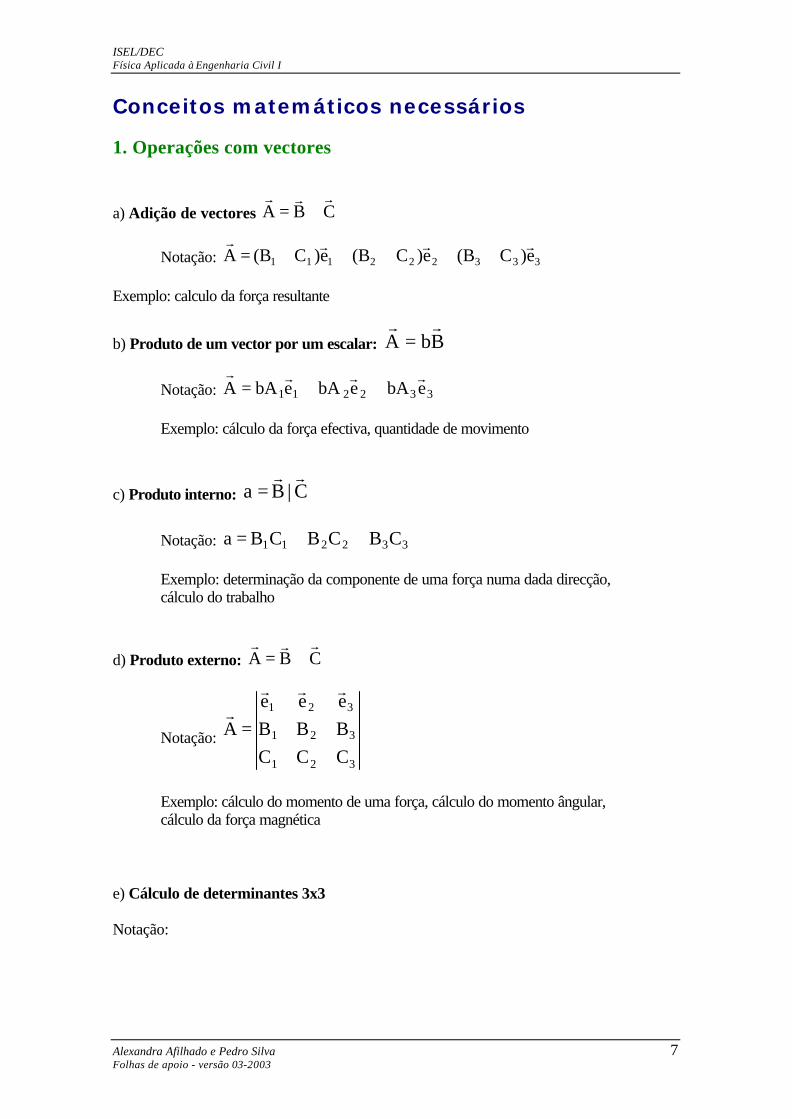
d) Produto externo: CBArrr
∧=
Notação:
321
321
321
CCC
BBB
eee
A
rrrr
=
Exemplo: cálculo do momento de uma força, cálculo do momento ângular, cálculo da força magnética
e) Cálculo de determinantes 3x3 Notação:

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 8 Folhas de apoio - versão 03-2003
)()()(
CCC
BBB
AAA
122133113223321
321
321
321
CBCBACBCBACBCBA −+−+−=
Exemplo: cálculo de momentos e rotacionais
Cálculo diferencial
a) Derivada e diferencial duma função
Notação: dxdx
dfdff(x)f =⇒=
Exemplo: determinação da velocidade conhecida a posição em função do tempo
b) Derivada da função composta
Notação: [ ]dt
dx
dx
df
dt
dfx(t)ff =⇒=
Exemplo: determinação da velocidade em função do tempo, de um corpo ligado a uma mola ou ligado a um dispositivo de amortecimento viscoso
c) Derivada parcial x∂
∂ e gradiente de um campo escalar V(P)
Notação: xV
V(P)x ∂
∂=∂∂
kz
Vj
y
Vi
x
VgradV
rrr∂∂
+∂∂
+∂∂
=
Exemplo: relação entre um campo de força conservativo e a respectiva energia potencial, determinação do trabalho de uma força conservativa
d) Rotacional de um campo vectorial (P)Fr
Notação:
zyx FFFzyx
kji
Frot∂∂
∂∂
∂∂=
rrrr

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 9 Folhas de apoio - versão 03-2003
Exemplo: verificação de que um campo de força é conservativo
Cálculo integral
a) Primitivas e integrais simples
Notação: cteF(x)f(x)dxdFf(x)dxdx
dFf(x) +=⇔=⇔= ∫
12
x
x
F
F
x
x
FFf(x)dxdFf(x)dxdFf(x)dxdx
dFf(x)
2
1
2
1
2
1
−=⇔=⇔=⇔= ∫∫∫
Exemplo: determinação da velocidade e/ou posição de um corpo, conhecidas as forças que sobre ele actuam
b) Integrais de linha de campos vectoriais
Notação: ∫=⇔=ã
dP|FW dP|FäWrr
, em que γ representa um caminho
Exemplo: cálculo do trabalho de uma força
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 10 Folhas de apoio - versão 03-2003
'rr
rr
rr∆sr∆
vr
Cinemática dos Corpos Rígidos
Introdução Estudo das relações existentes entre o tempo, as posições, as velocidades e as acelerações das várias partículas que formam um corpo rígido.
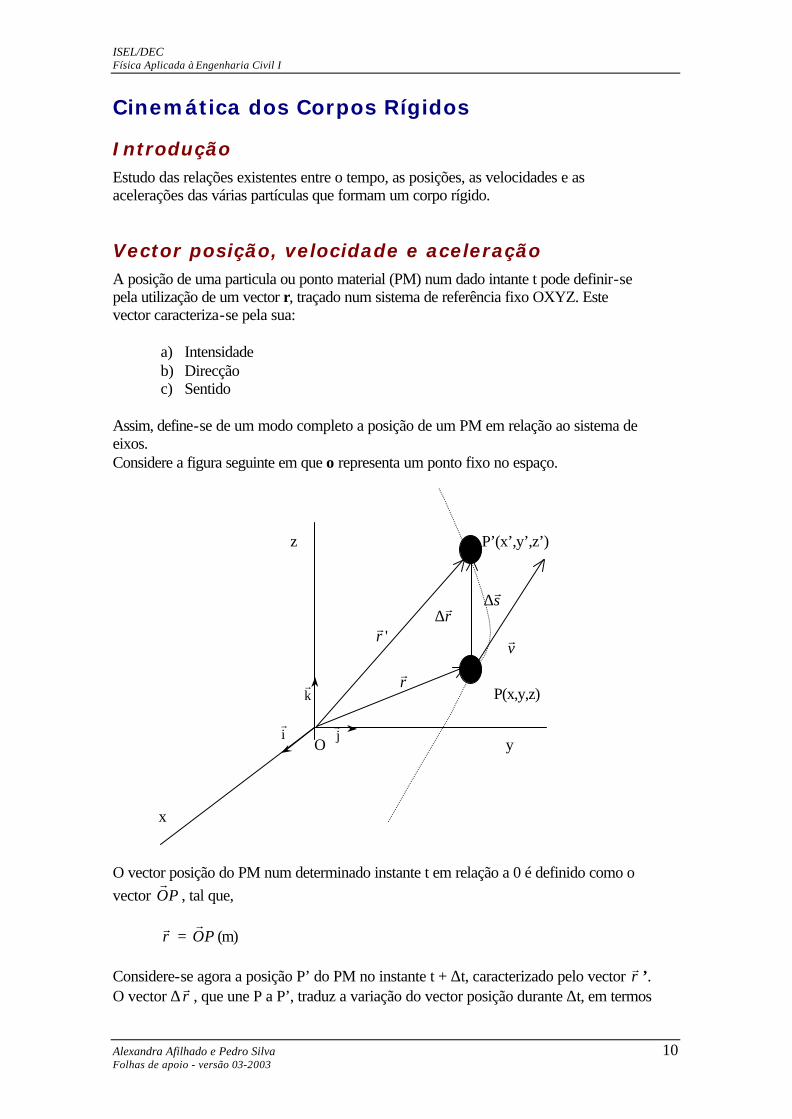
Vector posição, velocidade e aceleração A posição de uma particula ou ponto material (PM) num dado intante t pode definir-se pela utilização de um vector r, traçado num sistema de referência fixo OXYZ. Este vector caracteriza-se pela sua:
a) Intensidade b) Direcção c) Sentido
Assim, define-se de um modo completo a posição de um PM em relação ao sistema de eixos. Considere a figura seguinte em que o representa um ponto fixo no espaço.
O vector posição do PM num determinado instante t em relação a 0 é definido como o
vector POr
, tal que,
rr = POr
(m) Considere-se agora a posição P’ do PM no instante t + ∆t, caracterizado pelo vector rr ’. O vector ∆ rr , que une P a P’, traduz a variação do vector posição durante ∆t, em termos
P(x,y,z)
y
x
z
O ir
kr
jr
P’(x’,y’,z’)

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 11 Folhas de apoio - versão 03-2003
de direcção e intensidade. Deste modo temos a velocidade média do PM, definida como: v
rm = ∆ rr / ∆t
Escolhendo-se intervalos de tempo cada vez menores e por conseguinte, vectores ∆r cada vez menores, obtemos a velocidade instantânea:
vr
= lim|∆t -> 0 (∆ rr / ∆t) ≡ d rr / dt (m/s) A intensidades v do vector vr , designa-se velocidade do PM ou intensidade da velocidade. À medida que ∆t se torna menor, o comprimento aproxima-se do comprimento do arco PP’, sendo v dado por:
v = lim|∆t -> 0 (PP’ / ∆t) = lim|∆t -> 0 (∆∆ s / ∆t) ≡ ds / dt (m/s) Pode-se assim obter a velocidade v, derivando em ordem a t o comprmento s do arco descrito pelo PM. De modo análogo se obtém a aceleração média do PM, como, a
rm = ∆ v
r / ∆t
De salientar que a variação da velocidade se dá em direcção e intensidade. A aceleração instantânea, a qual corresponde à taxa de variação da velocidade no tempo, é representada pelo vector a dado por, ar = lim|∆t -> 0 (∆ vr / ∆t) ≡ dvr / dt = drr 2 / dt2 (m/s2) De salientar ainda que, geralmente o vector aceleração não é tangente à trajectória descrita pelo PM. A trajectória é a curva definida pelas sucessivas posições do PM. Em geral a posição, velocidade e aceleração do PM dependem do tempo, ou seja, rr = rr (t)
vr = vr (t) ar = ar (t)
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 12 Folhas de apoio - versão 03-2003
A
A’
B
B’
A
A’
B
B’
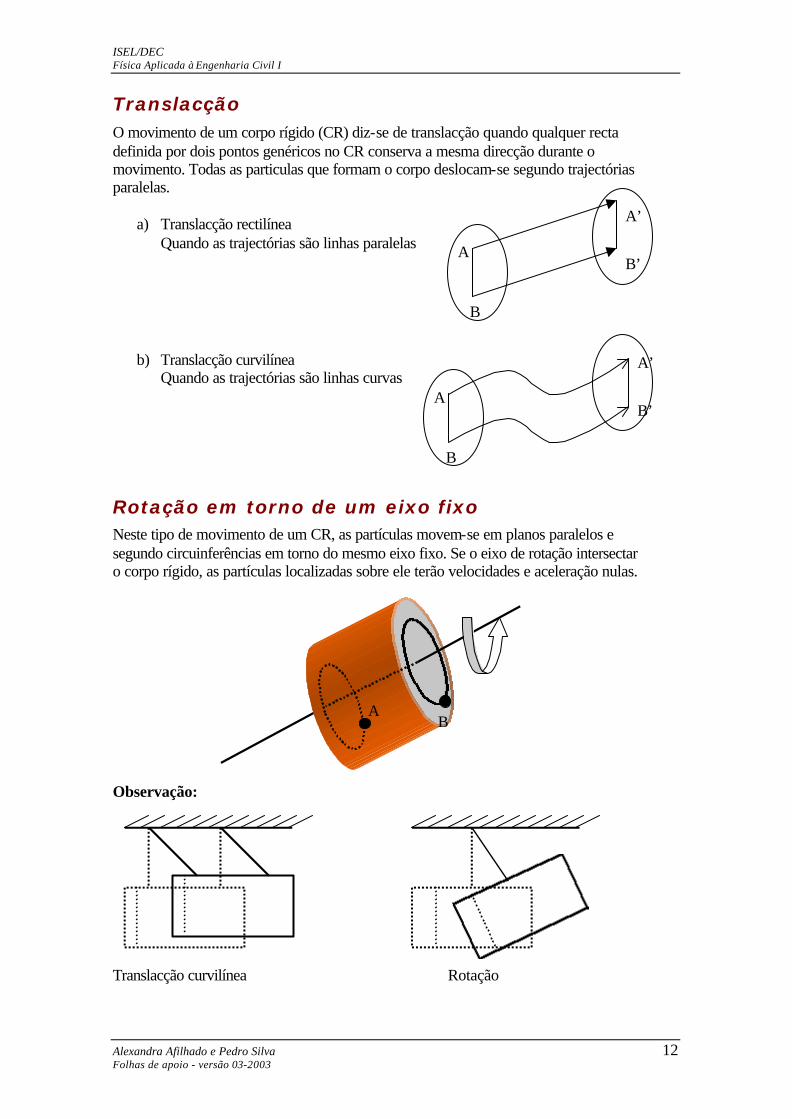
Translacção O movimento de um corpo rígido (CR) diz-se de translacção quando qualquer recta definida por dois pontos genéricos no CR conserva a mesma direcção durante o movimento. Todas as particulas que formam o corpo deslocam-se segundo trajectórias paralelas.
a) Translacção rectilínea Quando as trajectórias são linhas paralelas
b) Translacção curvilínea
Quando as trajectórias são linhas curvas
Rotação em torno de um eixo fixo Neste tipo de movimento de um CR, as partículas movem-se em planos paralelos e segundo circuinferências em torno do mesmo eixo fixo. Se o eixo de rotação intersectar o corpo rígido, as partículas localizadas sobre ele terão velocidades e aceleração nulas. Observação: Translacção curvilínea Rotação
A B

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 13 Folhas de apoio - versão 03-2003
Movimento rectílineo variado O movimento de um corpo diz-se rectilíneo quando a respectiva trajectória é uma recta. Para o movimento rectilíneo temos, r // v
r // a, e pode estudar-se o movimento apenas
com as seguintes expressões, rr = x i
r
vr = vx i
r = v i
r, com v = dx/dt
ar = ax i
r = a i
r , com a = dv/dt
O movimento diz-se variado quando a aceleração não é constante. Quando a aceleração é constante o movimento diz-se uniformemente variado. Dada a posição em função do tempo, a determinação de v
r e a
r é obtida directamente
por derivação. Contudo, quando se pretende determinar vr
e rr , dada a aceleração tem que se efectuar a integração das equações do movimento.
Aceleração como função do tempo: a = a(t)
Sabendo-se que, a(t) = dv/dt obtém-se,
∫+=t
tdt)t(avv
00
ou seja, dada a função a(t) e a velocidade num instante inicial t0 é possível determinar a velocidade em função do tempo. Para se obter a posição efectua-se o mesmo tipo de raciocinio, ou seja, sendo v = v(t) e sabendo-se que, v(t) = dx/dt obtém-se
∫+=t
t
dt)t(vxx0
0
Então, dada a velocidade v(t) e a posição num instante t0 é possível determinar a posição em função do tempo.
Aceleração como função da velocidade: a = a(v)
Quando a aceleração é dada em função da velocidade a = a(v), tem de se efectuar alguma manipulação das expressões antes de se integrar. Então de,

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 14 Folhas de apoio - versão 03-2003
a(v) = dv/dt ⇔ dt = dv/a(v) obtém-se
∫=−v
v
dv)v(a
tt0
10
conhecida a expressão a(v) e a velocidade no instante t0, pode determinar-se a velocidade em função do tempo. Pode ainda determinar-se x directamente da a = a(v). Ou seja, sendo, a=a(v), então, a(v) = dv/dt = (dv/dx)(dx/dt) = v dv/dx obtendo-se
∫+=v
v
dv)v(a
vxx0
0
Logo, obtém-se a posição em função da velocidade.
Aceleração como função da posição: a = a(x) Seguindo o mesmo tipo de raciocínio, temos então, a(x) = dv/dt = (dv/dx)(dx/dt) = v (dv/dx) obtendo-se
∫+=x
x
dx)x(avv0
0222
ou seja, para determinar a velocidade basta conhecer a(x), e a posição e velocidade num instante t0.
Casos Particulares 1 – Movimento rectilíneo uniforme Sendo, v = dx/dt = cte, logo da expressão anterior,
∫+=v
v
dv)v(a
vxx0
0
obtemos,

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 15 Folhas de apoio - versão 03-2003
x = x0 + v(t-t0) 2 – Movimento rectilíneo uniformemente acelerado Para este tipo de movimento, temos, a = dv/dt = cte
Considerando a expressão, ∫+=t
tdt)t(avv
00 , obtém-se,
v = v0 + at assumindo que t0 = 0. Considerando agora esta nova equação, e sabendo-se que: v = dx/dt = v0 + at obtém-se
2
2
00attvxx ++=
Considerando agora a expressão,
∫+=x
x
dx)x(avv0
0222
então para o tipo de movimento em questão obtemos,
)xx(avv 022 20
−+=
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 16 Folhas de apoio - versão 03-2003
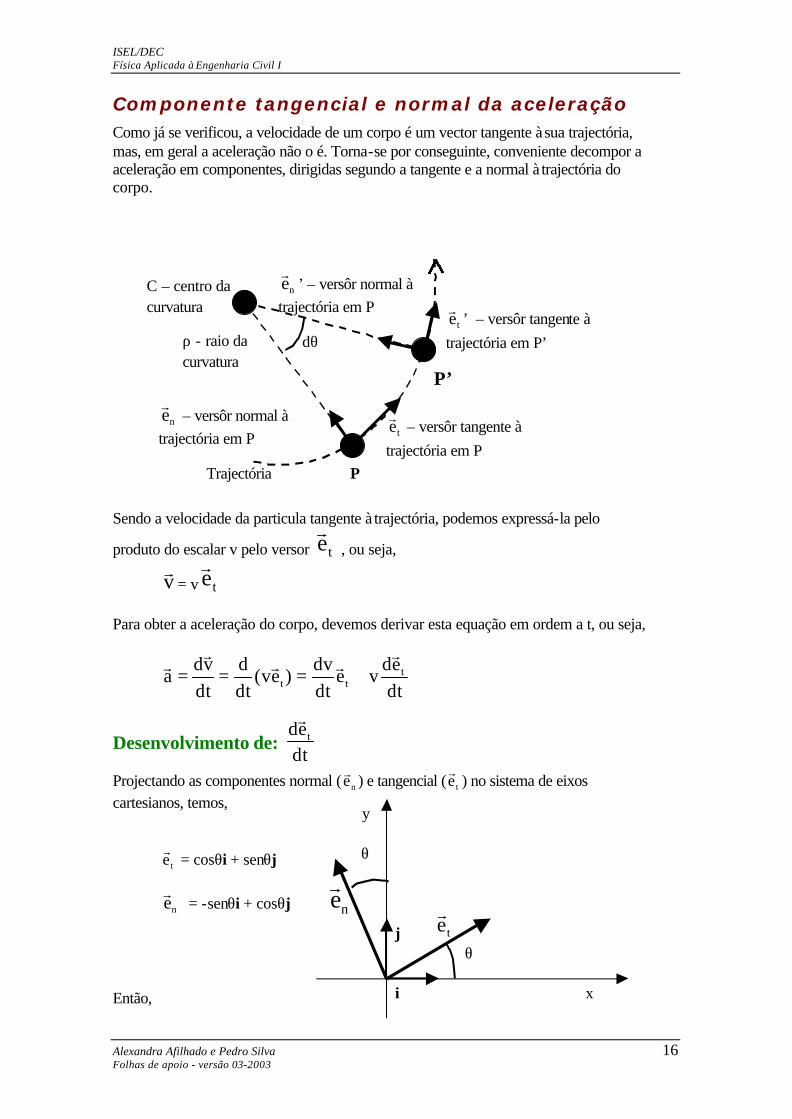
Componente tangencial e normal da aceleração Como já se verificou, a velocidade de um corpo é um vector tangente à sua trajectória, mas, em geral a aceleração não o é. Torna-se por conseguinte, conveniente decompor a aceleração em componentes, dirigidas segundo a tangente e a normal à trajectória do corpo. Sendo a velocidade da particula tangente à trajectória, podemos expressá-la pelo
produto do escalar v pelo versor ter
, ou seja,
vr
= v ter
Para obter a aceleração do corpo, devemos derivar esta equação em ordem a t, ou seja,
dt
edve
dt
dv)ev(
dt
d
dt
vda t
tt
rrrrr+===
Desenvolvimento de: dted t
r
Projectando as componentes normal ( ner
) e tangencial ( ter
) no sistema de eixos cartesianos, temos, te
r = cosθi + senθj
ne
r = -senθi + cosθj
Então, x
y
θ
θ
i
j terne
r
Trajectória
dθ
P
P’
ter
– versôr tangente à
trajectória em P
ter
’ – versôr tangente à
trajectória em P’
ner
– versôr normal à
trajectória em P
ner
’ – versôr normal à
trajectória em P
ρ - raio da curvatura
C – centro da curvatura
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 17 Folhas de apoio - versão 03-2003
j)e(dt
di)e(
dt
d
dt
edytxt
trrr
+=
)jcosisen(dt
djcos
dt
di)sen(
dt
djsen
dt
dicos
dt
d
dt
ed trrrrrrr
θ+θ−θ
=θθ
+θ−θ
=θ+θ=
nt e
dtd
dted rr
θ=
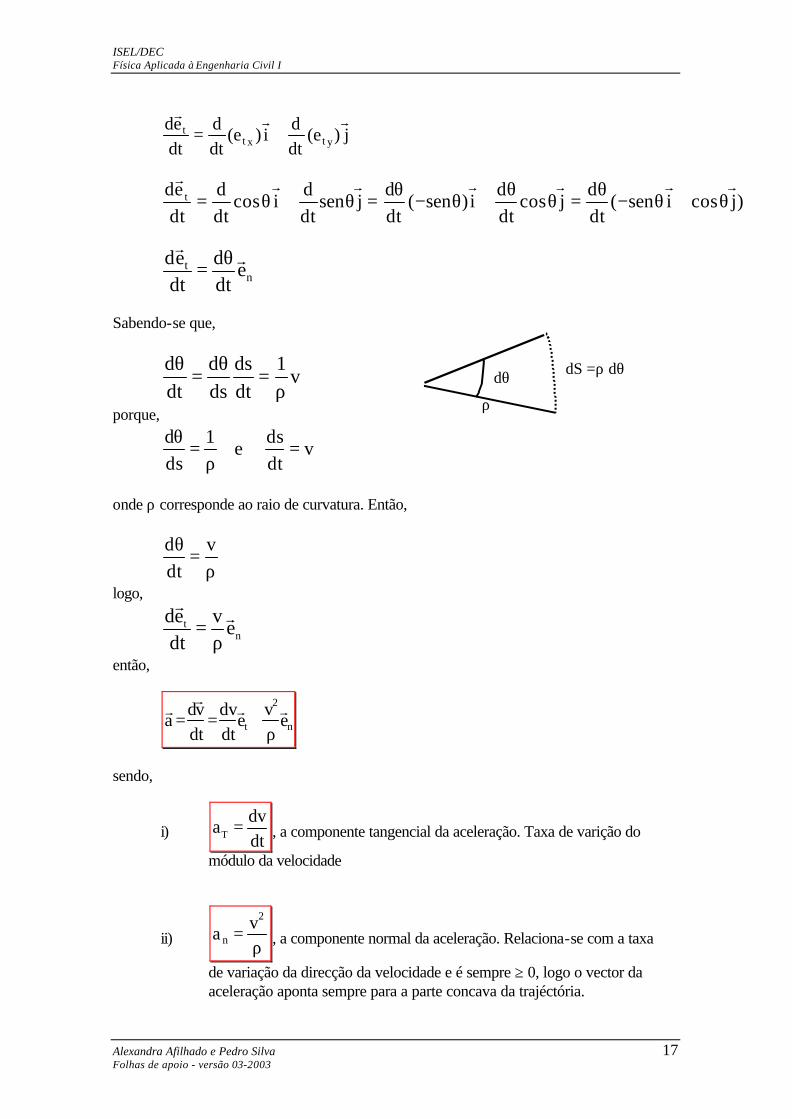
Sabendo-se que,
v1
dt
ds
ds
d
dt
d
ρ=
θ=
θ
porque,
vdt
ds e
1
ds
d=
ρ=
θ
onde ρ corresponde ao raio de curvatura. Então,
ρ
=θ v
dt
d
logo,
nt e
vdted rr
ρ=
então,
n
2
t ev
edt
dv
dt
vda
rrrrρ
+==
sendo,
i) dt
dvaT = , a componente tangencial da aceleração. Taxa de varição do
módulo da velocidade
ii) ρ=
2
nv
a , a componente normal da aceleração. Relaciona-se com a taxa
de variação da direcção da velocidade e é sempre ≥ 0, logo o vector da aceleração aponta sempre para a parte concava da trajéctória.
dθ dS =ρ dθ
ρ
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 18 Folhas de apoio - versão 03-2003
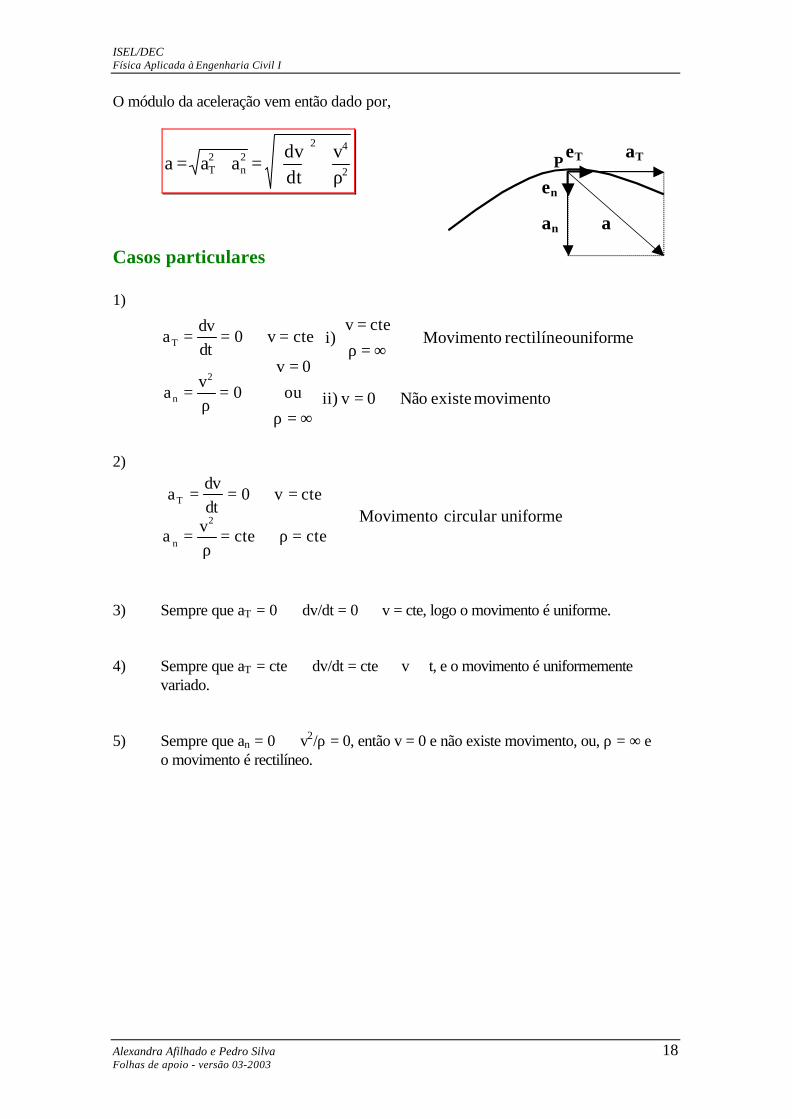
O módulo da aceleração vem então dado por,
2
422n
2T
vdtdv
aaaρ
+
=+=
Casos particulares 1)
movimento existe Não 0v ii)
uniforme rectilíneo Movimento ctev
)i
ou
0v
0v
a
ctev0dt
dva
2
n
T
⇒=
⇒
∞=ρ=
∞=ρ
=⇒=
ρ=
=⇒==
2)
uniformecircular Movimento ctecte
va
ctev0dt
dva
2
n
T
⇒
=ρ⇒=ρ
=
=⇒==
3) Sempre que aT = 0 ⇔ dv/dt = 0 ⇒ v = cte, logo o movimento é uniforme. 4) Sempre que aT = cte ⇔ dv/dt = cte ⇒ v ∝ t, e o movimento é uniformemente
variado. 5) Sempre que an = 0 ⇔ v2/ρ = 0, então v = 0 e não existe movimento, ou, ρ = ∞ e
o movimento é rectilíneo.
P aT eT
en
an a
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 19 Folhas de apoio - versão 03-2003
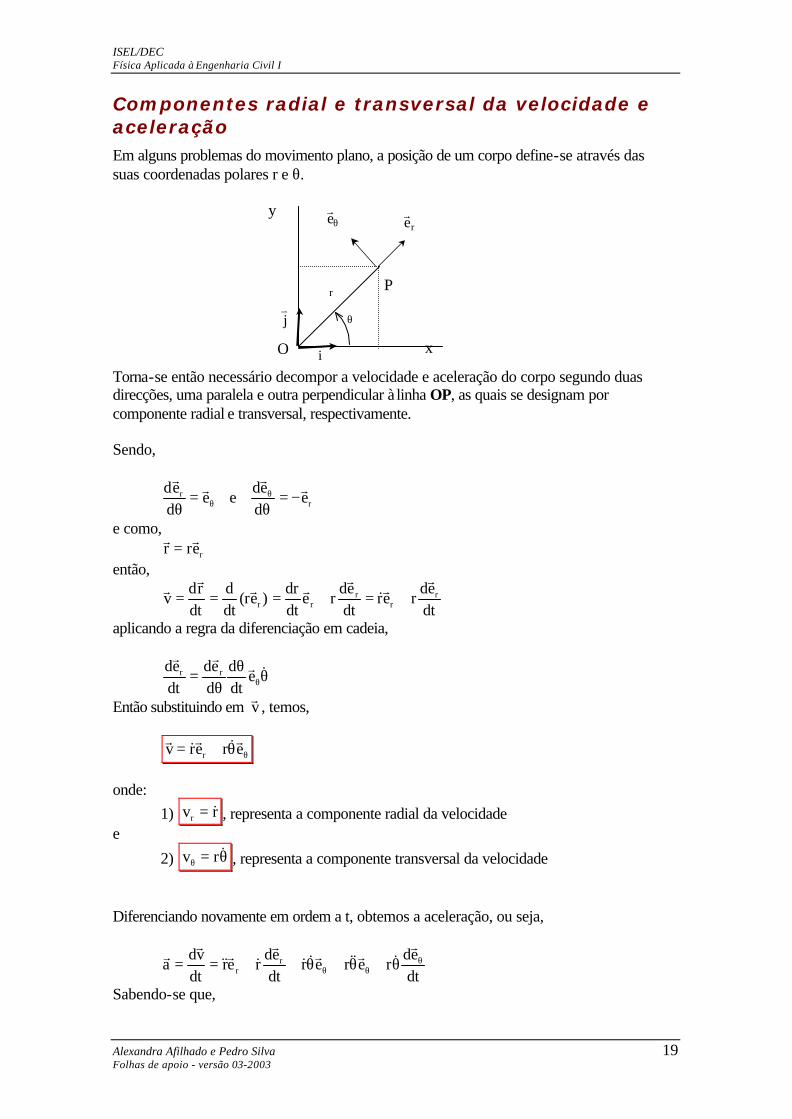
Componentes radial e transversal da velocidade e aceleração Em alguns problemas do movimento plano, a posição de um corpo define-se através das suas coordenadas polares r e θ. Torna-se então necessário decompor a velocidade e aceleração do corpo segundo duas direcções, uma paralela e outra perpendicular à linha OP, as quais se designam por componente radial e transversal, respectivamente. Sendo,
θ=θ
eded r rr
e reded rr
−=θ
θ
e como, rerr
rr=
então,
dted
rerdted
redtdr
)er(dtd
dtrd
v rr
rrr
rr&rrrrr
+=+===
aplicando a regra da diferenciação em cadeia,
θθ
θ= θ
&rrre
dtd
ded
dted rr
Então substituindo em vr
, temos,
θθ+= ererv r
r&r&r
onde:
1) rvr&= , representa a componente radial da velocidade
e
2) θ=θ&rv , representa a componente transversal da velocidade
Diferenciando novamente em ordem a t, obtemos a aceleração, ou seja,
dted
rererdted
rerdtvd
a rr
θθθ θ+θ+θ++==
r&r&&r&&
r&r&&
rr
Sabendo-se que,
x
θ
O
y
P r
rer
θer
ir
jv
ISEL/DEC Física Aplicada à Engenharia Civil I
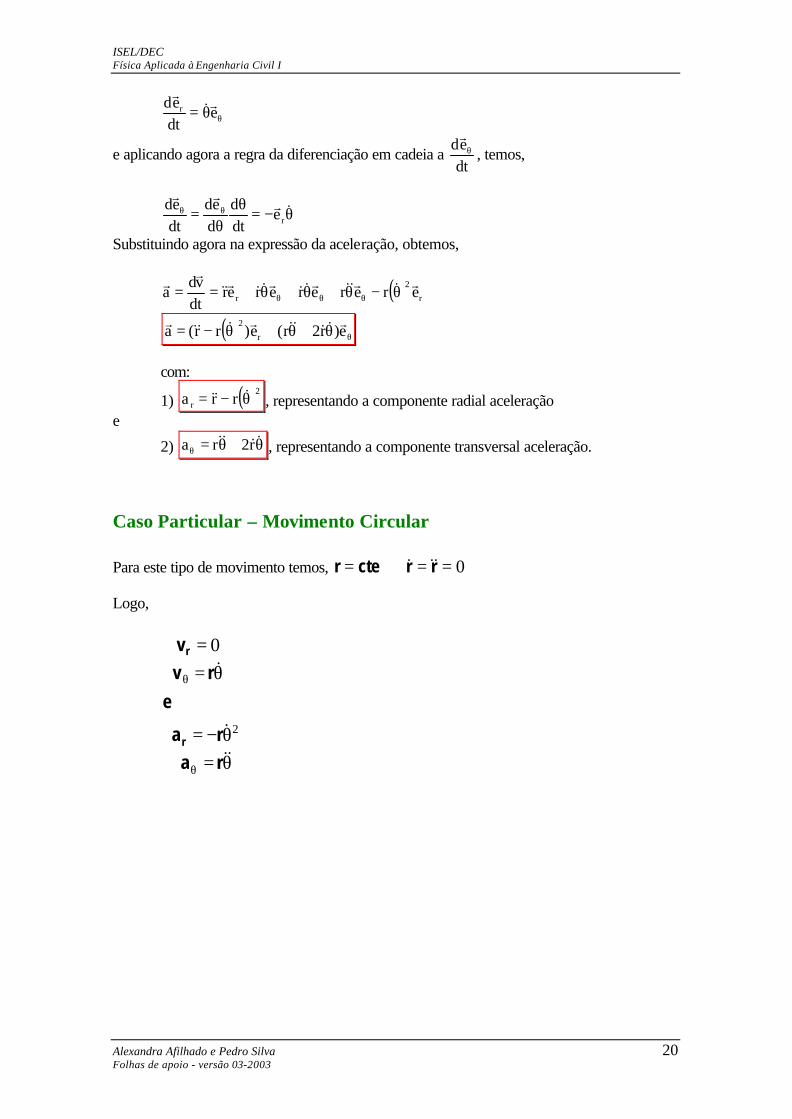
Alexandra Afilhado e Pedro Silva 20 Folhas de apoio - versão 03-2003
θθ= edted r r&r
e aplicando agora a regra da diferenciação em cadeia a dted θ
r, temos,
θ−=θ
θ= θθ &rrr
redtd
ded
dted
Substituindo agora na expressão da aceleração, obtemos,
( ) r
2
r erererererdtvd
ar&r&&r&&r&&r&&
rrθ−θ+θ+θ+== θθθ
( ) θθ+θ+θ−= e)r2r(e)rr(a r
2 r&&&&r&&&r
com:
1) ( )2
r rra θ−= &&& , representando a componente radial aceleração e
2) θ+θ=θ&&&& r2ra , representando a componente transversal aceleração.
Caso Particular – Movimento Circular Para este tipo de movimento temos, 0==⇒= rrcter &&& Logo,
θ=θ−=
θ==
θ
θ
&&&
&
rara
e
rv
v
r
r
2
0

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 21 Folhas de apoio - versão 03-2003
Movimento curvilíneo variado Quando o movimento é variado, a aceleração não é constante e a determinação da velocidade e posição em função do tempo a partir da aceleração envolve integração das equações do movimento. Seja,
)(tr r e )t(vv ),t(aa 00rrrrrr
=== 00 então,
∫∫∫ +=⇔=⇔=⇔=t
t
t
t
v
vdtavvdtavddtavd
dtvda
000
0
rrrrrrrrr r
r
e
∫∫∫ +=⇔=⇔=⇔=t
t
t
t
r
rdtvrrdtvrddtvrd
dtrdv
000
0
rrrrrrrrr r
r
Em coordenadas cartesianas estas equações vectoriais passam à forma:
∫+=t
txxx dtavv
0
0
∫+=t
tYYY dtavv
0
0
∫+=t
tZZZ dtavv
0
0
e
∫+=t
txdtvxx
0
0
∫+=t
tydtvyy
0
0
∫+=t
tzdtvzz
0
0

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 22 Folhas de apoio - versão 03-2003
Quando se conhecem as componentes tangencial e normal da aceleração pode proceder-se à integração das equações do movimento como se descreveu para o movimento rectilíneo, tendo em conta que se deve substituir a aceleração por aceleração tangencial, ou seja, Se aT =aT(t), pode usar-se a relação desta com v para determinar v(t):
∫∫∫ +=⇔=⇔=⇔=t
tT
t
tT
v
vTT dtavvdtavddtadv
dtdva
000
0
Se aT =aT(s) ou aT =aT(v), efectuam-se as mudanças de variável necessárias e obtêm-se expressões análogas às obtidas no caso do movimento rectilíneo.
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 23 Folhas de apoio - versão 03-2003
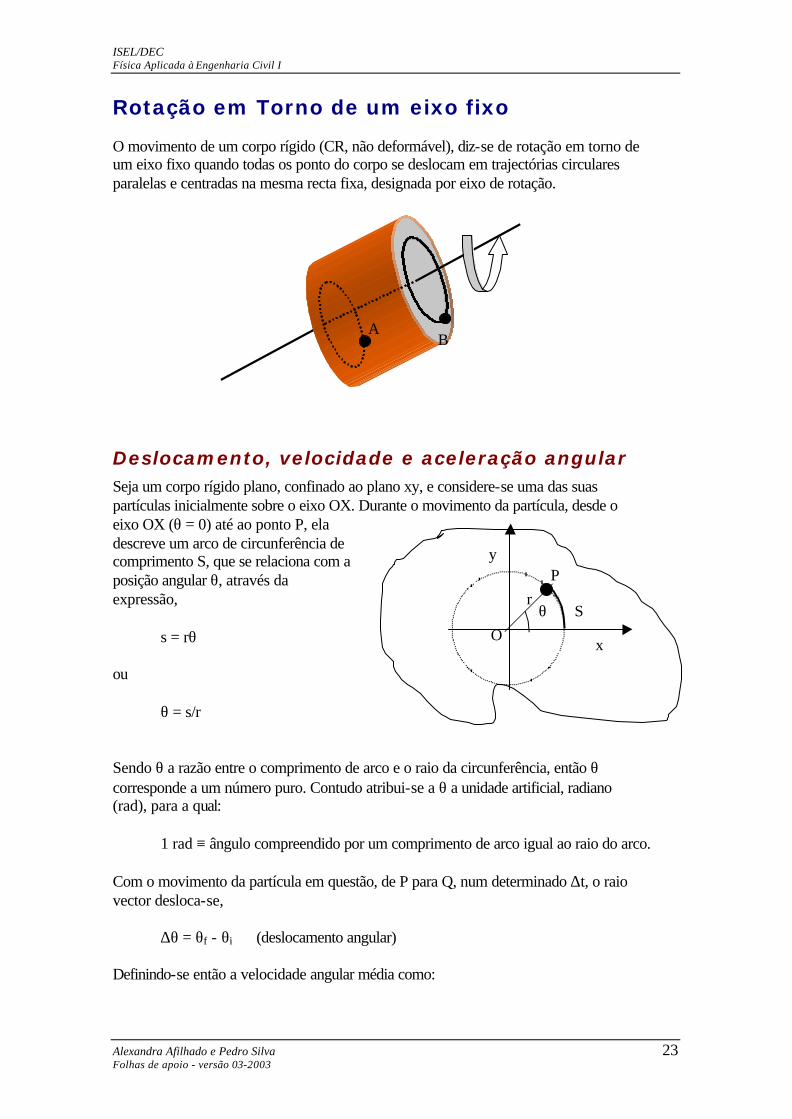
Rotação em Torno de um eixo fixo
O movimento de um corpo rígido (CR, não deformável), diz-se de rotação em torno de um eixo fixo quando todas os ponto do corpo se deslocam em trajectórias circulares paralelas e centradas na mesma recta fixa, designada por eixo de rotação.
Deslocamento, velocidade e aceleração angular Seja um corpo rígido plano, confinado ao plano xy, e considere-se uma das suas partículas inicialmente sobre o eixo OX. Durante o movimento da partícula, desde o eixo OX (θ = 0) até ao ponto P, ela descreve um arco de circunferência de comprimento S, que se relaciona com a posição angular θ, através da expressão, s = rθ ou θ = s/r Sendo θ a razão entre o comprimento de arco e o raio da circunferência, então θ corresponde a um número puro. Contudo atribui-se a θ a unidade artificial, radiano (rad), para a qual: 1 rad ≡ ângulo compreendido por um comprimento de arco igual ao raio do arco. Com o movimento da partícula em questão, de P para Q, num determinado ∆t, o raio vector desloca-se, ∆θ = θf - θi (deslocamento angular) Definindo-se então a velocidade angular média como:
A B
x
y P
r S θ
O

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 24 Folhas de apoio - versão 03-2003
ttt if
if
∆θ∆=
−θ−θ
=ω
e a velocidade angular instântanea, como,
(rad/s) dtd
tlimt
θ=∆
θ∆=ω→∆ 0
A velocidade angular, ω, é positiva quando θ aumenta (movimento no sentido contrário ao dos ponteiros do relógio) e negativo quando θ diminui (sentido dos ponteiros do relógio). A aceleração angular média, α , de um objecto em rotação é definida como:
ttt if
if
∆ω∆=
−ω−ω=α
e a aceleração instântanea, como,
)(rad/s dtd
dtd
t2
tlim 2
2
0
θ=
ω=
∆ω∆
=α→∆
α é positivo quando a taxa de rotação aumenta no sentido contrário ao dos ponteiros dos relógio, ou quando a taxa de rotação decresce no sentido contrário dos ponteiros do relógio. Aquando da rotação em torno de um eixo fixo, qualquer que seja a partícula de um objecto rígido, roda o mesmo ângulo e tem a mesma velocidade e aceleração angular que o corpo. Isto é, as quantidades, θ, ω e α de um determinado ponto material do corpo caracterizam o movimento rotacional de todo esse corpo rígido.
x
y
P, ti r θ f
O
r
θ i
Q, tf
x
y
A rB
θ B
O
rA
θ A
B
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 25 Folhas de apoio - versão 03-2003
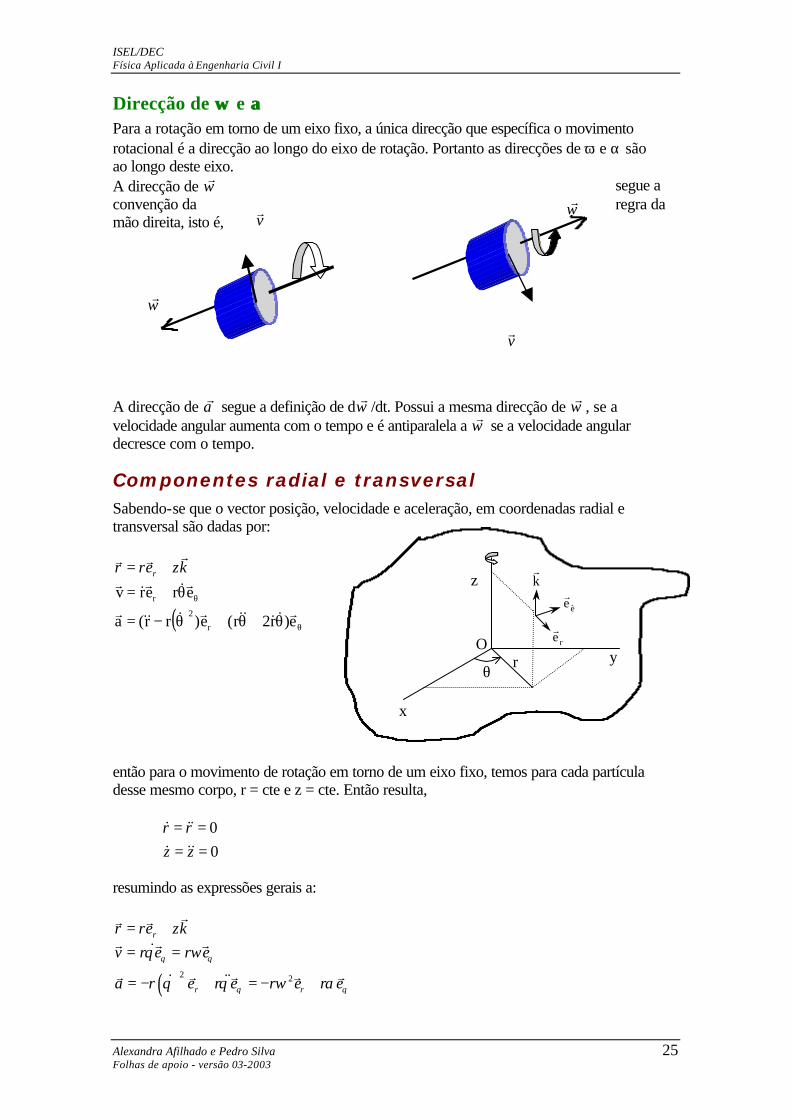
Direcção de ωω e αα Para a rotação em torno de um eixo fixo, a única direcção que específica o movimento rotacional é a direcção ao longo do eixo de rotação. Portanto as direcções de ω e α são ao longo deste eixo. A direcção de ω
r segue a
convenção da regra da mão direita, isto é, A direcção de α
r segue a definição de dω
r/dt. Possui a mesma direcção de ω
r, se a
velocidade angular aumenta com o tempo e é antiparalela a ωr
se a velocidade angular decresce com o tempo.
Componentes radial e transversal Sabendo-se que o vector posição, velocidade e aceleração, em coordenadas radial e transversal são dadas por:
rr re zk= +rr r
θθ+= ererv r
r&r&r
( ) θθ+θ+θ−= e)r2r(e)rr(a r
2 r&&&&r&&&r
então para o movimento de rotação em torno de um eixo fixo, temos para cada partícula desse mesmo corpo, r = cte e z = cte. Então resulta,
0
0
r rz z
= == =
& &&& &&
resumindo as expressões gerais a:
rr re zk= +rr r
v r e r eθ θθ ω= =r r r&
( )2 2r ra r e r e r e r eθ θθ θ ω α= − + = − +r r r r r& &&
ωr
vr
vr
ωr
vr
y
x
z
O
kr
rer
èer
r θ

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 26 Folhas de apoio - versão 03-2003
De salientar que a coordenada angular θ define completamente a posição do corpo rígido.
Relações entre as variáveis lineares e angulares (forma escalar) Uma partícula move-se uma distância s ao longo de um arco quando o corpo gira um ângulo θ. Portanto: s = r × θ Diferenciando ambos os membros em ordem ao tempo, temos,
sendo r = ctedS drdt dt
θ=
Como a velocidade linear é dada por, v = dSdt
, e a velocidade angular por, ω = ddtθ
,
então é válida a seguinte relação, v = ω × r o que nos permite relacionar os módulos da velocidade linear tangencial e da velocidade angular. Diferenciando esta última equação em ordem ao tempo, temos
sendo r = ctedv drdt dt
ω=
Como, a aceleração tangencial é dada por,
Tdv adt
=
e a aceleração angular por,
ddtω
α=
então, temos a relação entre os módulos da aceleração tangencial e angular dada por, aT = α × r Sabendo-se que a aceleração normal é dada por,
2
nvar
=
e utilizando agora a expressão que relaciona os módulos das velocidades temos, 2
na rω= ×

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 27 Folhas de apoio - versão 03-2003
Propriedades
Na rotação de um corpo rígido em torno de um eixo fixo, tém-se,
i) vr é sempre transversal e exprime-se como v = ω × r ii) sendo para este tipo de movimento, r = cte, então ar tem componentes radial e transversal que coincidem com as componentes normal e tangencial, respectivamente, ou seja, an = r ω2 = r × (θ& )2 = ar e aT = r × α = r × θ&& = - aθ
podendo o módulo da aceleração ser dado por,
2 2 2 4 2 2 2 2ra a a r r rθ ω α α ω= + = + = +
iii) As equações que definem a rotaçao de um corpo rígido em torno de um eixo fixo são:
a) 0
0( ) ( )t
t
dt t dtdtθ
ω θ θ ω= ⇒ = + ∫
b) 0
2
02( ) ( )
t
t
d dt t dtdt dtω θ
α ω ω α= = ⇒ = + ∫
c) 0
0
2 2( ) ( )d d d d ddt d dt d
θ
θ
ω ω θ ωα θ ω ω ω α θ θ
θ θ= = = ⇒ = + ∫
iv) Casos particulares a) movimento de rotação uniforme
para este tipo de movimento temos: α = 0 ⇒ aT = 0
ω = cte ⇒ an = cte e v = cte θ = θ0 + ωt, assumindo t0 = 0
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 28 Folhas de apoio - versão 03-2003
b) movimento de rotação uniformemente acelerado
Para este tipo de movimento temos, α = cte ⇒ aT = cte
ω = ω0 + αt ⇒ an = f(t) e v = f(t), assumindo t0 = 0 θ = θ0 + ω0t + (1/2)αt2 , assumindo t0 = 0
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 29 Folhas de apoio - versão 03-2003
Operadores Diferenciais
Os campos podem ser classificados tanto como escalares ou vectoriais.
Um campo escalar é uma função singular do espaço e tempo, onde para cada ponto do espaço P(x, y, z) está associado um escalar (o qual é independente do sistema de coordenadas escolhidas). A temperatura de um volume de gás, a altitude e a densidade de um volume de rocha são exemplos de campos escalares.
Exemplos:
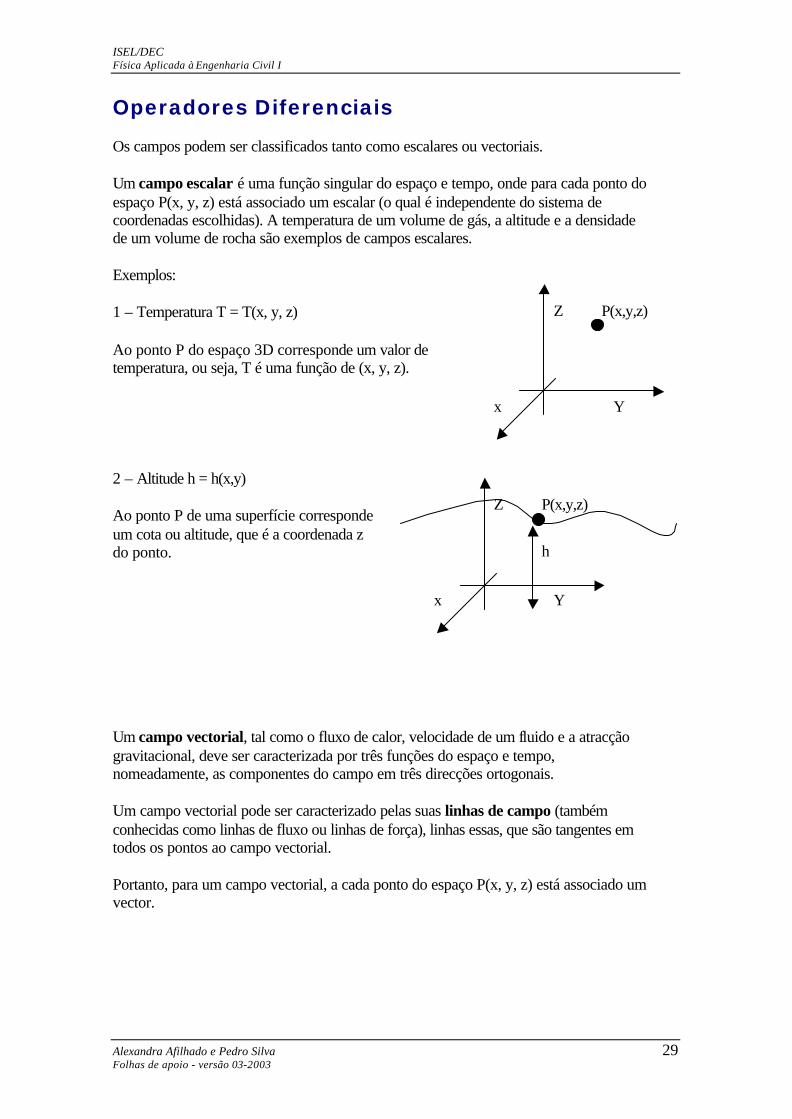
1 – Temperatura T = T(x, y, z)
Ao ponto P do espaço 3D corresponde um valor de temperatura, ou seja, T é uma função de (x, y, z).
2 – Altitude h = h(x,y)
Ao ponto P de uma superfície corresponde um cota ou altitude, que é a coordenada z do ponto.
Um campo vectorial, tal como o fluxo de calor, velocidade de um fluido e a atracção gravitacional, deve ser caracterizada por três funções do espaço e tempo, nomeadamente, as componentes do campo em três direcções ortogonais.
Um campo vectorial pode ser caracterizado pelas suas linhas de campo (também conhecidas como linhas de fluxo ou linhas de força), linhas essas, que são tangentes em todos os pontos ao campo vectorial.
Portanto, para um campo vectorial, a cada ponto do espaço P(x, y, z) está associado um vector.
Z
Y x
P(x,y,z)
Z
Y x
P(x,y,z)
h
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 30 Folhas de apoio - versão 03-2003
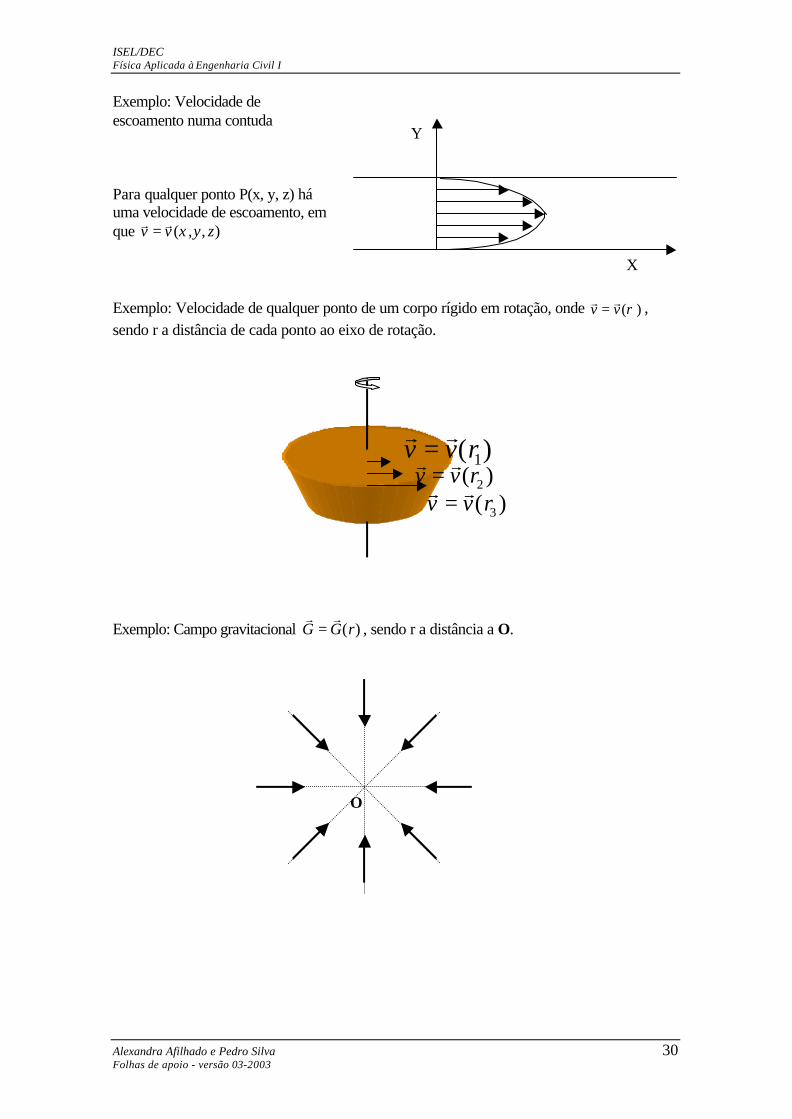
Exemplo: Velocidade de escoamento numa contuda
Para qualquer ponto P(x, y, z) há uma velocidade de escoamento, em que ( , , )v v x y z=r r
Exemplo: Velocidade de qualquer ponto de um corpo rígido em rotação, onde ( )v v r=r r , sendo r a distância de cada ponto ao eixo de rotação.
Exemplo: Campo gravitacional ( )G G r=r r
, sendo r a distância a O.
X
Y
3( )v v r=r r
2( )v v r=r r
1( )v v r=r r
O
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 31 Folhas de apoio - versão 03-2003
Gradiente
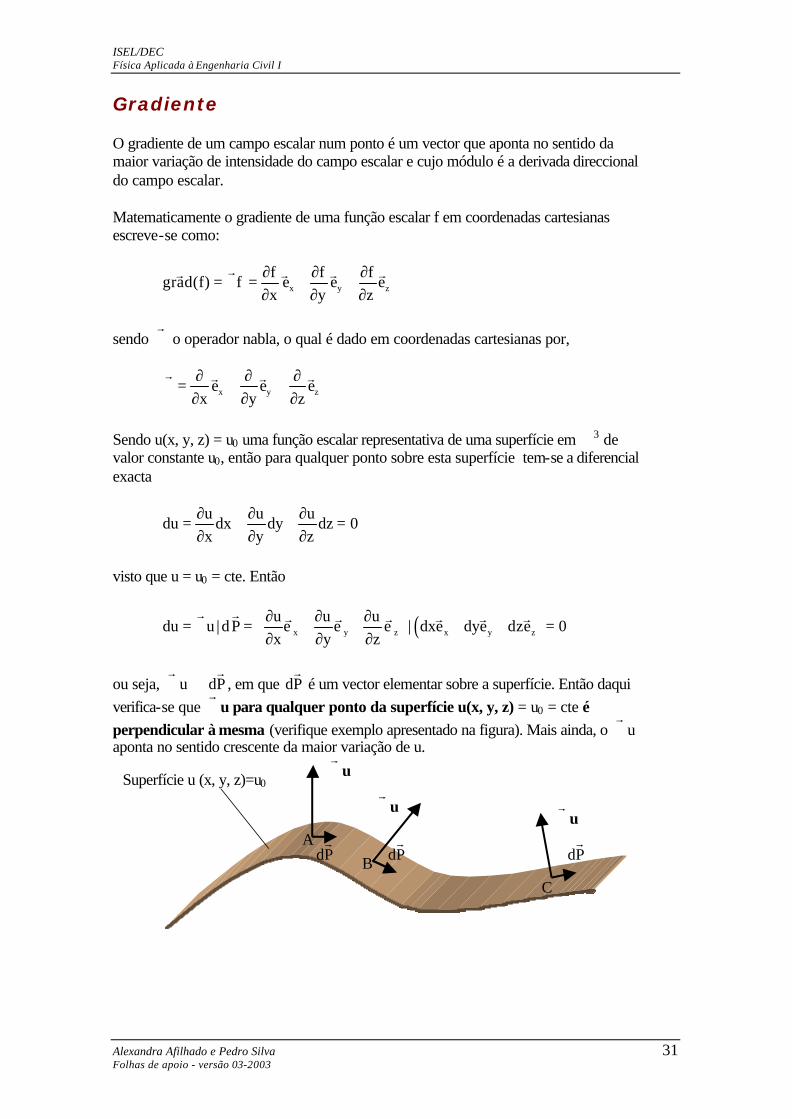
O gradiente de um campo escalar num ponto é um vector que aponta no sentido da maior variação de intensidade do campo escalar e cujo módulo é a derivada direccional do campo escalar.
Matematicamente o gradiente de uma função escalar f em coordenadas cartesianas escreve-se como:
x y z
f f fgrad(f) f e e e
x y z
∂ ∂ ∂= ∇ = + +
∂ ∂ ∂
rr r r r
sendo ∇r
o operador nabla, o qual é dado em coordenadas cartesianas por,
x y ze e ex y z
∂ ∂ ∂∇ = + +
∂ ∂ ∂
r r r r
Sendo u(x, y, z) = u0 uma função escalar representativa de uma superfície em ℜ3 de valor constante u0, então para qualquer ponto sobre esta superfície tem-se a diferencial exacta
u u udu dx dy dz 0
x y z
∂ ∂ ∂= + + =
∂ ∂ ∂
visto que u = u0 = cte. Então
( )x y z x y z
u u udu u |dP e e e | dxe dye dze 0
x y z
∂ ∂ ∂= ∇ = + + + + = ∂ ∂ ∂
r r r r r r r r
ou seja, ∇r
u ⊥ dPr
, em que dPr
é um vector elementar sobre a superfície. Então daqui
verifica-se que ∇r
u para qualquer ponto da superfície u(x, y, z) = u0 = cte é
perpendicular à mesma (verifique exemplo apresentado na figura). Mais ainda, o ∇r
u aponta no sentido crescente da maior variação de u.
Superfície u (x, y, z)=u0 ∇r
u
∇r
u ∇r
u
dPr
dPr
dPr
A
B
C
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 32 Folhas de apoio - versão 03-2003
Exemplo: Seja a função escalar u = 3x2 + 5y3. O seu gradiente é então dado por:
2u 6xi 15y j 0k∇ = + +r r rr
em que para o ponto P(1,1), temos o gradiente dado por,
u 6i 15j∇ = +r rr
correspondendo a componente do ∇r
u numa dada direcção à taxa de variação do campo escalar definido pela função u nessa direcção:
P(1,1) P(1,1)
u u6 e 15
x y
∂ ∂ = = ∂ ∂
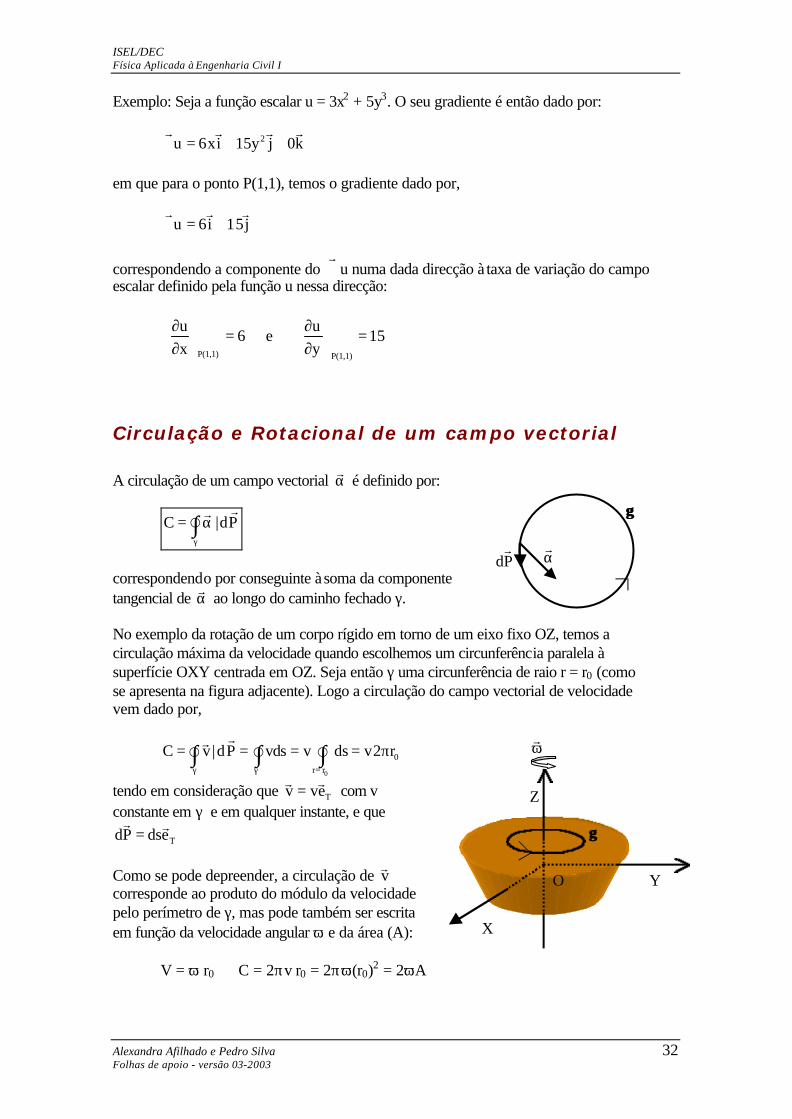
Circulação e Rotacional de um campo vectorial A circulação de um campo vectorial α
r é definido por:
C |dPγ
= α∫rrÑ
correspondendo por conseguinte à soma da componente tangencial de α
r ao longo do caminho fechado γ.
No exemplo da rotação de um corpo rígido em torno de um eixo fixo OZ, temos a circulação máxima da velocidade quando escolhemos um circunferência paralela à superfície OXY centrada em OZ. Seja então γ uma circunferência de raio r = r0 (como se apresenta na figura adjacente). Logo a circulação do campo vectorial de velocidade vem dado por,
0
0
r r
C v|dP vds v ds v2 rγ γ =
= = = = π∫ ∫ ∫rrÑ Ñ Ñ
tendo em consideração que Tv ve=rr
com v constante em γ e em qualquer instante, e que
TdP dse=r r
Como se pode depreender, a circulação de v
r
corresponde ao produto do módulo da velocidade pelo perímetro de γ, mas pode também ser escrita em função da velocidade angular ω e da área (A): V = ω r0 ⇒ C = 2πv r0 = 2πω(r0)2 = 2ωA
ωr
X
Y
Z
O
γγ
γγ
αr
dPr

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 33 Folhas de apoio - versão 03-2003
ωr
X
Y
Z
O
γγ
Se escolhermos uma circunferência de igual raio mas paralela a OXZ ou a OYZ, então a circulação de v
r será nula,
C v |dP 0γ
= =∫rrÑ
visto que vr
está restringido ao plano OXY enquanto que as trajectórias se enquandram em
planos perpendiculares a este, ou seja, vr
⊥ dPr
.
Rotacional O rotacional de um campo vectorial α
r num determinado ponto P corresponde a um
vector cuja direcção indica a orientação da curva fechada para a qual a circulação do campo é máxima, e de módulo igual à circulação por unidade de área, ou seja,
A 0
|rot | lim|dP
A→
α = γα∫r
rrÑ
Em coordenadas cartesianas, sendo o campo vectorial αr
, dado por:
x y zi j kα = α + α + αr r rr
então
y yz x z x
x y z
î j k
rot i j kx y z y z z x x y
∂α ∂α ∂ ∂ ∂ ∂α ∂α ∂α ∂α α = ∇ ∧ α = = − + − + − ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ α α α
r rrr r rrr r
em que ∧ representa o produto vectorial (ou externo). Exemplo: Considere-se a rotação de um corpo rígido em torno de um eixo fixo OZ. Então, sabendo-se que o vector velocidade linear é dado pelo produto externo entre a velocidade angular e o raio da trajectória, temos,
ωr
X
Y
Z
rr
P(x, y, z)
A
P
γ
rotαr

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 34 Folhas de apoio - versão 03-2003
î j k
v r 0 0 yi xj
x y z
= ω ∧ = ω = −ω + ω
r rrr rr rr
então o rotacional de v
r, vem dado por,
î j k
rotv k k 2 kx y z
y x 0
∂ ∂ ∂= ∇ ∧ α = = ω + ω = ω
∂ ∂ ∂−ω ω
r rrr r rr rr
Logo verifica-se que para a rotação de um corpo rígido, o rotacional do campo vectorial das velocidades é um campo vectorial cujo valor é o mesmo em qualquer ponto e está direccionado ao longo do eixo de rotação com o dobro da magnitude da velocidade angular. Tal resultado pode ainda ser verificado a partir da definição do módulo do rotacional, ou seja, sendo C = 2ωA, obtém-se,
A 0
|rotv| limA 0
v|dP 2 Alim 2
A A→
=→
ω∫ = = ωr
rrÑ
como seria de esperar. Observação: Um campo vectorial α
r é conservativo sse o rotα
r = 0 e neste caso existe um campo
escalar u tal que αr
= ∇r
u. Para verificar se um campo α
r é conservativo, basta verificar se todas as componentes
de rotαr
se anulam, ou seja, verificar se,
y yz x z x0 e 0 e 0y z z x x y
∂α ∂α ∂α ∂α ∂α ∂α − = − = − = ∂ ∂ ∂ ∂ ∂ ∂
ou seja, para que α
r seja conservativo deve ter-se:
y yz x z x, e y z z x x y
∂α ∂α∂α ∂α ∂α ∂α= = =
∂ ∂ ∂ ∂ ∂ ∂
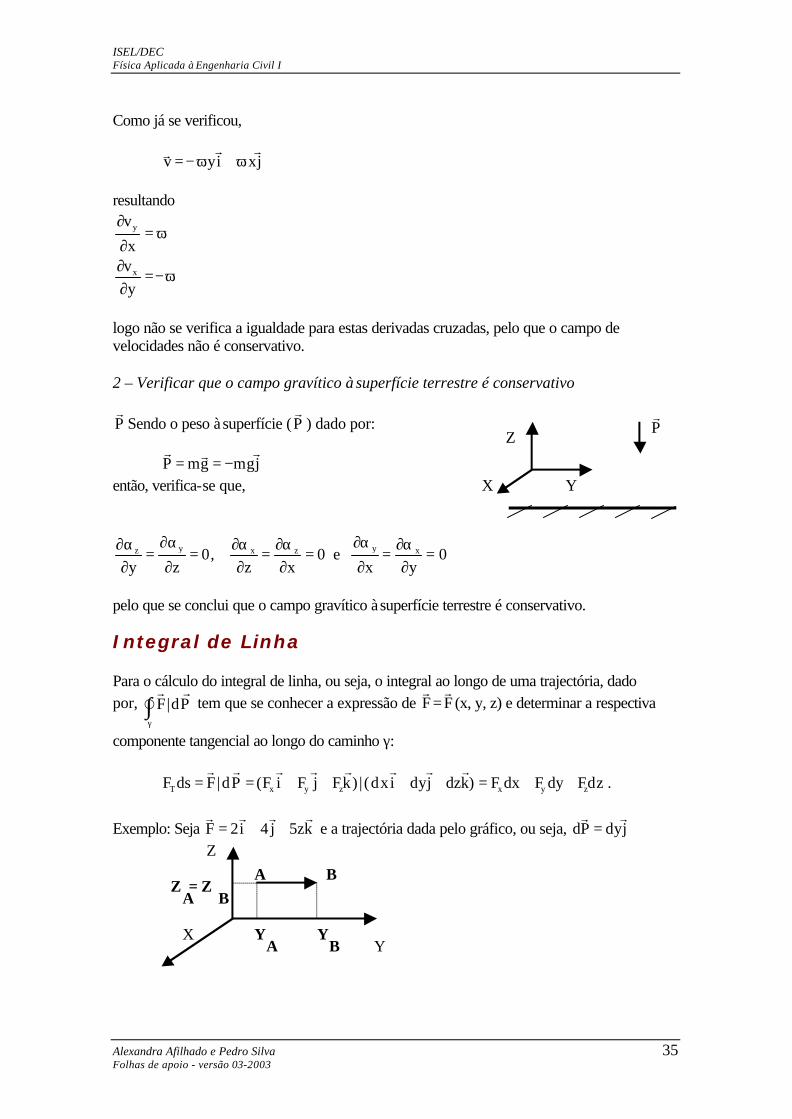
ou seja, verificar se as derivadas cruzadas são nulas. Exemplos: 1 – Verificar que o campo de velocidades de um corpo rígido em rotação em torno do eixo OZ não é conservativo.
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 35 Folhas de apoio - versão 03-2003
Como já se verificou,
v yi xj= − ω + ωr rr
resultando
y
x
v
xv
y
∂= ω
∂∂
=−ω∂
logo não se verifica a igualdade para estas derivadas cruzadas, pelo que o campo de velocidades não é conservativo. 2 – Verificar que o campo gravítico à superfície terrestre é conservativo
Pr
Sendo o peso à superfície (Pr
) dado por: P mg mgj= = −
rr r
então, verifica-se que,
y yz x z x0, 0 e 0y z z x x y
∂α ∂α∂α ∂α ∂α ∂α= = = = = =
∂ ∂ ∂ ∂ ∂ ∂
pelo que se conclui que o campo gravítico à superfície terrestre é conservativo.
Integral de Linha
Para o cálculo do integral de linha, ou seja, o integral ao longo de uma trajectória, dado por, F|dP
γ∫
r rÑ tem que se conhecer a expressão de Fr
=Fr
(x, y, z) e determinar a respectiva
componente tangencial ao longo do caminho γ:
T x y z x y zF ds F|dP (F i F j Fk) | (dxi dyj dzk) F dx F dy Fdz= = + + + + = + +r r r r r rr r
.
Exemplo: Seja F 2i 4 j 5zk= + +r r rr
e a trajectória dada pelo gráfico, ou seja, dP dyj=rr
X
Z
Y
Pr
X
Z
Y
A B
Y B
Y A
Z = Z A B
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 36 Folhas de apoio - versão 03-2003
Então de A para B, temos,
AF|dP (2i 4 j 5z k)|(dyj) 4dy= + + =r r r rr r
integrando, obtemos,
( )B
A
Y
B A
Y
F|dP 4dy 4 y yγ
= = −∫ ∫r r
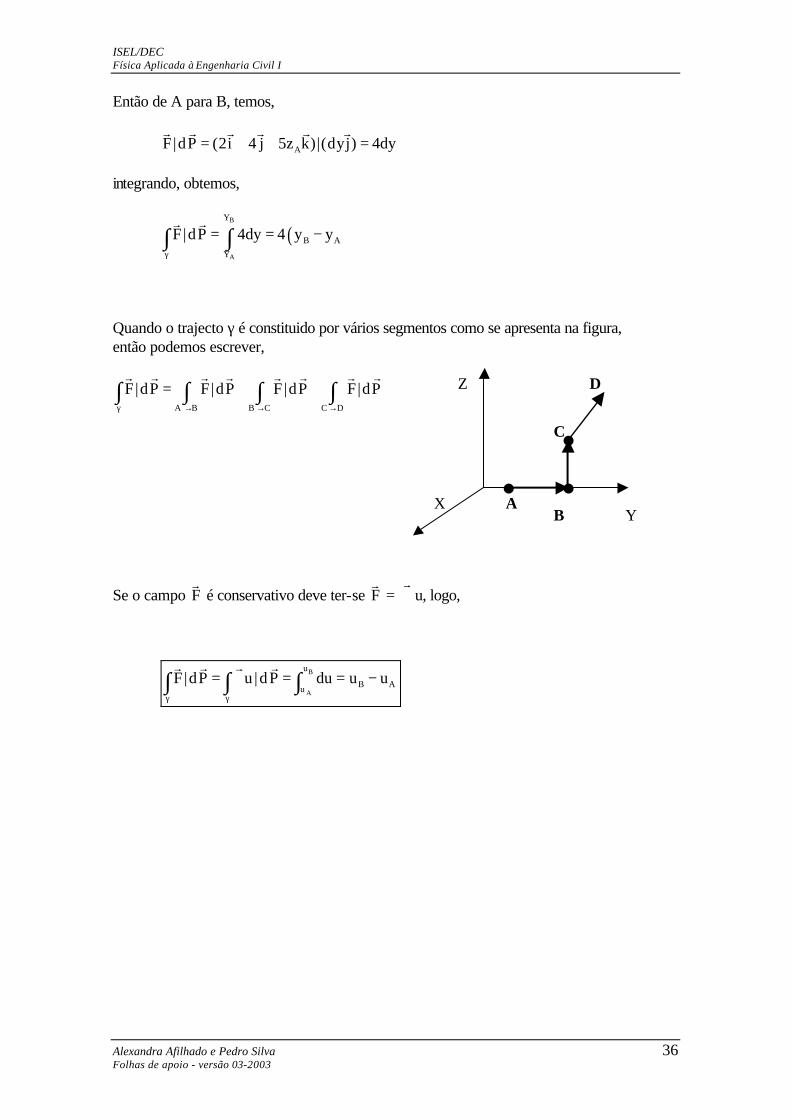
Quando o trajecto γ é constituido por vários segmentos como se apresenta na figura, então podemos escrever,
A B B C C D
F|dP F|dP F|dP F|dPγ → → →
= + +∫ ∫ ∫ ∫r r r r r r r r
Se o campo Fr
é conservativo deve ter-se Fr
= ∇r
u, logo,
B
A
u
B Au
F|dP u |dP du u uγ γ
= ∇ = = −∫ ∫ ∫r r r r
X
Z
Y
C
B A
D
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 37 Folhas de apoio - versão 03-2003
Dinâmica
Ao estudo da relação entre o movimento de um corpo e as causas desse movimento, chama-se dinâmica. Pela experiência diária sabemos que o movimento de um corpo é um resultado directo da sua interacção com outros corpos que o cercam. As interacções são convenientemente descritas por um conceito matemático denominado força. O estudo da dinâmica é basicamente a análise da relação entre a força e as variações do estado de movimento de um corpo. Neste capítulo será introduzido o conceito de força. Serão discutidas as leis de Newton, as quais descrevem o modo de como um corpo responde a um conjunto de forças. Serão também apresentadas as forças de atrito e o modo de como podem ser matematicamente representadas.
Observações
1 - A força é a causa do movimento na mecânica clássica. A mecânica clássica trabalha com sistemas de dimensão >> 10-10m (dimensões atómicas) e velocidades << 3.0 × 108 m/s (aproximadamente a velocidade da luz). 2 – A força é um vector 3 – Existem dois tipos de forças: a) Forças de contacto. As quais envolvem o contacto físico entre objectos. A compressão de uma bola, o puxar de uma porta, são exemplos deste tipo de força. b) Campos de forças. As quais não implicam contacto físico entre objectos. O campo gravitacional e o campo electromagnético são exemplos deste tipo de forças.
Primeira Lei de Newton ou Lei da Inércia Enunciado: um objecto que se encontre em repouso ficará em repouso e um objecto que se encontre em movimento manterá o seu movimento a velocidade constante, se não existir qualquer tipo força externa entre o objecto e o ambiente que o rodeia. De salientar no entanto, que tal comportamento não existe no universo, uma vez que toda a partícula está sujeita a interacções com o resto do universo físico. Um corpo que não está sujeito à interacção é dito livre. A expressão matemática que traduz a Primeira Lei de Newton, está de acordo com,
0 0F a= ⇒ =∑r r

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 38 Folhas de apoio - versão 03-2003
Segunda Lei de Newton ou Lei fundamental da dinâmica Antes de se considerar a 2ª Lei, propriamente dita, tem de se ter em consideração:
i) a quantidade de movimento e
ii) o princípio da conservação da quantidade de movimento A quantidade de movimento, também denominado de momento cinético, ou simplesmente momento de um partícula, é definido como o produto da sua massa pela sua velocidade. Designado por,
P mv=r r
Pode-se agora dar outro enunciado à Lei de Inércia, dizendo-se que, Uma partícula livre move-se sempre com quantidade de movimento constante. O princípio da conservação diz-nos que a quantidade de movimento total de um sistema de partículas isolado é constante, ou seja,
1 2 3 ...i ni
P P P P P P cte= = + + + + =∑r
À variação temporal da quantidade de movimento de uma partícula dá-se o nome força (resultante), ou seja,
dPFdt
=rr
Então, a massa constante, temos,
( ) 0d dm dvF mv v m madt dt dt
= = + = +rr r r r
dvF m madt
= =rr r
⇐⇐ 2ª Lei de Newton
Observações
• quando Fr
é constante e ar
é inversamente proporcional à massa. Tal significa, que para a mesma força, uma massa mais pequena terá uma maior aceleração.
• A 2ª Lei de Newton é uma quantidade vectorial que compreende três equações
escalares (em três dimensões): , , x x y y z zF ma F ma F ma= = =∑ ∑ ∑
• A 1ª Lei de Newton é um caso especial da 2ª Lei de newton.
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 39 Folhas de apoio - versão 03-2003
• A unidade de força no Sistema Internacional (SI) é o Newton (N). 1 Newton é a força que produz uma aceleração de 1m/s2 quando actua sobre uma massa de 1kg.
Equilíbrio dinâmico
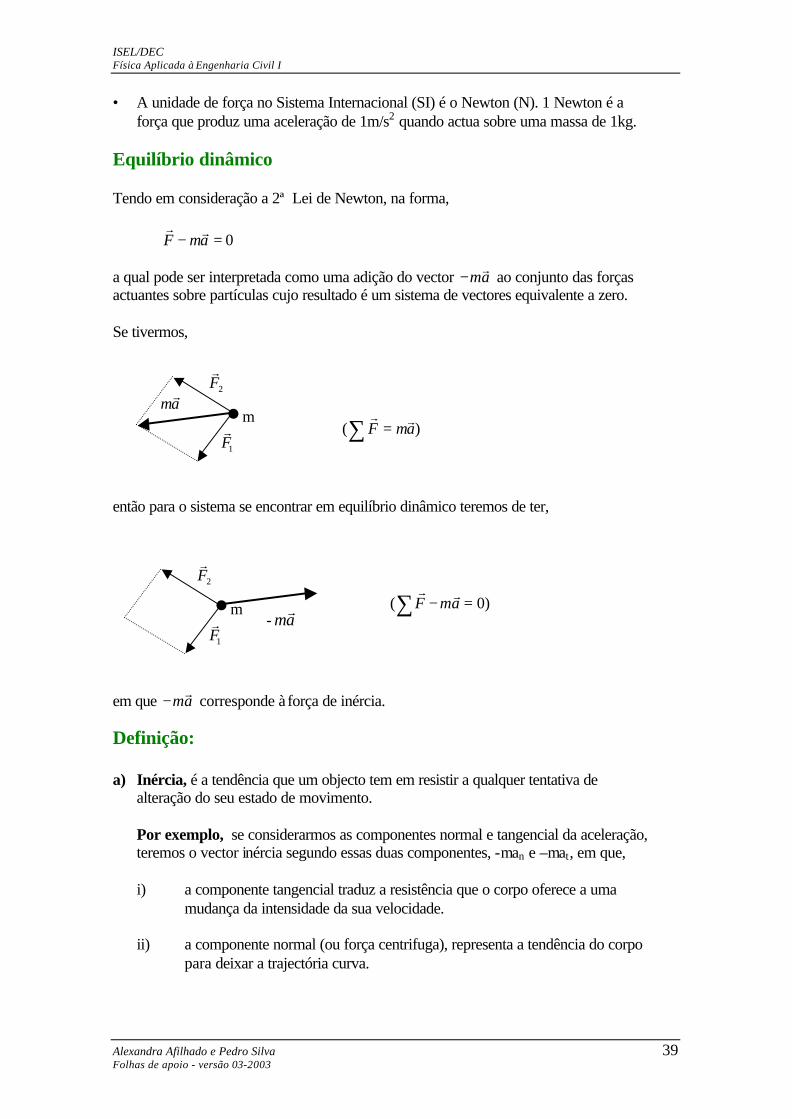
Tendo em consideração a 2ª Lei de Newton, na forma,
0F ma− =r r
a qual pode ser interpretada como uma adição do vector ma−
r ao conjunto das forças
actuantes sobre partículas cujo resultado é um sistema de vectores equivalente a zero. Se tivermos,
( )F ma=∑r r
então para o sistema se encontrar em equilíbrio dinâmico teremos de ter,
( 0)F ma− =∑r r
em que ma−
r corresponde à força de inércia.
Definição: a) Inércia, é a tendência que um objecto tem em resistir a qualquer tentativa de
alteração do seu estado de movimento.
Por exemplo, se considerarmos as componentes normal e tangencial da aceleração, teremos o vector inércia segundo essas duas componentes, -man e –mat, em que,
i) a componente tangencial traduz a resistência que o corpo oferece a uma
mudança da intensidade da sua velocidade.
ii) a componente normal (ou força centrifuga), representa a tendência do corpo para deixar a trajectória curva.
1Fr
2Fr
m mar
1Fr
2Fr
m - ma
r
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 40 Folhas de apoio - versão 03-2003
As forças de inércia, como por exemplo, dvmdt
− e 2vmr
− , surgem como uma
resistência à variação do estado de movimento dos corpos. No caso de um elevador, dvmdt
− , é a oposição à variação de v. No caso de um automóvel a efectuar uma
curva, 2vmr
− , corresponde à oposição à mudança de direcção de v.
b) Massa (m), é a força necessária por unidade de aceleração produzida e é uma
medida da inércia. A massa é uma quantidade escalar e tem como unidades no sistema internacional (SI) o quilograma (kg).
Por exemplo, se uma bola de “bowling” e uma bola de golfe forem projectadas, verificar-se-à que será mais difícil de obter movimento para a bola de “bowling”, uma vez que possui mais massa e por conseguinte uma maior inércia.
c) Peso ( pr ), é a força exercida num objecto pelo campo gravitacional. Da segunda lei
de Newton, vem,
p mg=r r
De salientar que: O peso é um vector dirigido para o centro de Terra, ou perpendicular à superfície da Terra. O peso de um objecto é diferente na Terra e na Lua, uma vez que a intensidade do campo gravitacional é diferente (gTerra ≠ gLua). O valor de g varia com a distância ao centro da Terra. Como consequência,
i) como o planeta Terra não é uma esfera perfeita, o peso de um corpo varia ligeiramente de lugar para lugar na superfície terrestre.
ii) o peso de um corpo varia ligeiramente com a altitude acima da superfície
terrestre.
iii) Assume-se que na superfície terrestre, o valor de g é aproximadamente constante e dado por 9.8m/s2.
Em comparação, a massa é uma quantidade escalar com valor independente da localização. De salientar no entanto, assumindo-se que g é aproximadamente constante, a massa é proporcional à magnitude do peso e as duas quantidades podem ser mutuamente usadas. A tal correlação chama-se, princípio da equivalência.
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 41 Folhas de apoio - versão 03-2003
Terceira Lei de Newton Enunciado: As forças na natureza existem sempre aos pares. A Terceira Lei de Newton diz-nos que, para cada acção, existe uma reacção de intensidade igual e sentido oposto. Quando dois corpos interagem 12 21F F= −
r r, ou seja a força exercida pelo corpo 1 no
corpo 2, é de intensidade igual e sinal contrário à força exercida pelo corpo 2 no corpo 1, ou seja a reacção. Por exemplo, quando um objecto está em queda devido à acção da gravidade, a Terra exerce uma força sobre ele que provoca a sua aceleração na direcção do centro da Terra. De acordo com a 3ª Lei de Newton, o objecto exerce uma força na Terra, assim como, a Terra acelera na direcção do objecto. Então agora questiona-se o porquê de não sentirmos a aceleração da Terra? Da 2ª Lei de Newton sabemos que,
objectonaTerra Terra TerraF m a=r r
e da 3ª Lei de Newton que,
objectonaTerra TerranoobjectoF F p= − ≡ −r r r
logo,
TerraTerra
objectoTerra
Terra
pam
ma g g
m
= − ⇔
⇔ =
rr
r =
concluindo-se assim, que a aceleração da Terra é demasiadamente baixa para se detectar, porque a massa da Terra é muito maior que a do objecto.
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 42 Folhas de apoio - versão 03-2003
Atrito O atrito surge das forças entre átomos e moléculas aquando do contacto entre superficies. Por exemplo, o atrito surge quando um corpo se move sobre uma superfície ou através de um meio fluido (água, ar, ...). Existem dois tipos de forças de atrito seco (ou de Coulomb):
1. força de atrito estático ( fs ), é a força entre dois objectos quando não
existe movimento. 2. força de atrito cinética ( fk ), é a força de atrito entre dois objectos
quando dois objectos estão em movimento Considere um bloco sobre um superfície rugosa horizontal. Aplique uma força externa Fext ao bloco, paralelamente à superfície de contacto:
• Se Fext < fs(max) o bloco não se move. • Com o aumento de Fext, a fs aumentará até atingir um valor máximo. Quando,
Fext = fs(max) o bloco iniciará o movimento (obtém-se assim o ponto de deslizamento eminente).
• Uma vez iniciado o movimento, a força de atrito será dada por fk .
Factos experimentais sobre o atrito 1 – fs ≤≤ µµ s ×× N onde µs é o coeficiente de atrito estático e N a magnitude da força normal.
A igualdade é obtida quando o objecto se encontra na situação de deslizamento eminente, fs(max) = µs×N.
2 – fk = µµ k ×× N onde µk é o coeficiente de atrito cinético e é aproximadamente constante
para qualquer par de materiais 3 – os valores de µk e µs dependem da natureza das superfícies de contacto. Usualmente
µk < µs. 4 – o sentido da força de atrito é oposto ao sentido de movimento do objecto. 5 – os valores de µk e µs são aproximadamente independentes da área de contacto entre
as duas superfícies. 6 – µk é aproximadamente independente da velocidade do objecto considerado.
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 43 Folhas de apoio - versão 03-2003
Estratégia na resolução de problemas
• Desenhar a situação e o diagrama de forças (ou de corpo livre) de todas as forças para cada corpo.
o No diagrama de forças para cada objecto, inclua apenas as forças que actuam nesse objecto.
o A força exercida por um cabo é denominada de tensão e denota-se
usualmente por Tr
. o A força de contacto exercida por uma superfície tem duas componentes:
a reacção normal, que actua sempre perpendicularmente à superfície e a força de atrito, tangente à superfície.
• Esboce um sistema de coordenadas e aplique a 2ª Lei de Newton. Se tivermos movimento no plano, então:
∑ ∑∑
==
⇔=yy
xx
maFmaF
amFrr
• Se necessário use as equações da cinemática do movimento para a resolução das quantidades desejadas.

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 44 Folhas de apoio - versão 03-2003
Trabalho e Enegia
Trabalho
O trabalho realizado por um agente que exerce uma força constante Fr
no deslocamento elementar drr de A para B, define-se como o produto interno F
r|drr , ou seja,
dW = F
r|drr
Pode-se ainda escrever, cosTdW F ds Fds θ= = sabendo ds =|drr | e que FT=Fcosθ é a componente tangencial da força. Em coordenadas cartesianas pode-se também ter,
x y zdW F dx F dy F dz= + +
O trabalho realizado pela força Fr
ao longo de um deslocamento finito da partícula de A para B, é obtido pela integração ao longo da trajectória descrita pela partícula, ou seja,
( )( , , )
( , , )
| cosB B B B
A A A A
x y z SB
A B x y zA x y z S
W F dr F dx F dy F dz F dsθ→ = = + + =∫ ∫ ∫r r
sendo s a variável de integração que mede a distância percorrida pela partícula ao longo da trajectória.
Observações:
• Se rr = 0 ⇒ W = 0, isto é, não é realizado trabalho quando se segura uma caixa pesada ou se empurra contra uma parede.
• W = 0 se Fr
⊥ drr , isto é, não é realizado trabalho ao se transportar qualquer peso horizontalmente.
• O sinal do trabalho depende da direcção de Fr
relativamente a drr . Se:
A
B Fr
drr

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 45 Folhas de apoio - versão 03-2003
i) θ < 90, então dW > 0 ii) θ > 90, então dW < 0
O sinal é dado automaticamente considerando θ como o ângulo entre Fr
e drr e escrever-se dW = Fdscosθ
• Se Fr
actua ao longo da direcção da trajectória dsr , então dW = Fds, visto que, cosθ=cos0=1.
• O trabalho é um escalar, quando depende do caminho entre o ponto inicial e o ponto final.
• A unidade do trabalho no sistema internacional é o Joule (J; 1J = 1Nm=kgm2s-2).
Princípio do Trabalho e da Energia A força é um vector, o trabalho e a energia são escalares, sendo frequentemente mais fácil a resolução de problemas usando considerações da energia em vez de usar as leis de Newton (os escalares são de mais fácil manipulação do que os vectores).
Considere-se uma partícula de massa m sujeita à acção de uma força Fr
e que se desloca ao longo de uma trajectória curva ou rectilínea. Tendo em conta a 2ª Lei de Newton em função da sua componente tangencial, FT = maT = m dv/dt sabendo que v = ds/dt, e aplicando a regra da derivação em cadeia, resulta,
TF = m =mvdv ds dvds dt ds
então, FT ds = m vdv/ds integrando,
2 21( )
2
B B
A A
s v
T A B B As v
F ds mvdv W m v v→= ⇔ = −∫ ∫
definindo a energia cinética de uma massa em movimento como,
21
2CE mv=
então podemos escrever o trabalho como,
A B C CW = E (B) - E (A)→
Fn
FT
Frm
A
B
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 46 Folhas de apoio - versão 03-2003
Esta última equação traduz o princípio do trabalho e energia: o trabalho realizado num objecto pela força resultante, entre duas posições A e B é igual à variação da energia cinética entre essas duas posições. Observação:
• Se a velocidade do objecto aumenta (vf > vi ) ⇒ W > 0. • Se W < 0 então o objecto está a realizar trabalho no agente que exerce o
conjunto de forças • Pode-se interpretar a energia cinética da última equação como o trabalho que um
objecto pode efectuar para obter o repouso. • A energia cinética é um campo escalar. • As unidades da energia cinética são as mesmas do trabalho (isto é, Joules, J).
Energia Potencial e trabalho A energia potencial (EP) corresponde à energia armazenada num sistema em consequência da posição e orientação das sua partes constituintes. A energia potencial ou função potencial de F
r é apenas definida para forças
conservativas. O trabalho de forças conservativas pode ser dado em função da energia potencial, correspondendo neste caso à variação da energia potencial, ou seja, WA→B=EP(A) – EP(B) = -∆EP em que EP(A) = EP(xA, yA, zA) e EP(B) = EP(xB, yB, zB). De salientar que o trabalho calculado deste modo, não vai depender da trajectória mas apenas da diferença de energia potencial. Se F
r é conservativa tem-se,
| 0F dr =∫
r rÑ
ou seja, se fizermos A coincidir com B ao longo de uma trajectória fechada, o seu trabalho é nulo. Se considerarmos dois pontos vizinhos A(x, y, z) e A’(x+dx, y+dy, z+dz), para os quais é válida a equação WA→A’=EP(A) – EP(A’), então o trabalho elementar dW, o qual corresponde ao deslocamento dr de A para A’, é: dW = EP(x, y, z) – EP(x+dx, y+dy, z+dz) ou dW = -dEP(x, y, z)

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 47 Folhas de apoio - versão 03-2003
daqui verifica-se que o trabalho elementar realizado por uma força conservativa é uma diferencial exacta. No caso unidimensional tem-se
PP
EdE dxx
∂=
∂
logo, comparando com dW = Fr
|drr = Fxdx, resulta que,
Px
EFx
∂= −
∂
e no caso tridimensional,
dW = Fr
|drr = Fxdx + Fydy + Fzdz ⇔
⇔ dW = ( ) ( )P P PP P
E E Edx dy dz grad E Ex y z
∂ ∂ ∂− + + = − =−∇
∂ ∂ ∂
rr
Escolha do sistema de coordenanadas Aquando da resolução de problemas com energia potencial, a escolha da origem do sistema de eixos é equivalente a escolher o lugar onde a energia potencial é nula. Sabe-se que a física deve ser independente da escolha do sistema de eixos coordenados, logo o valor da energia potencial num dado lugar não tem significado físico. A quantidade que possui significado físico é a variação de energia potencial de uma posição para outra.
Conservação da Energia Existem muitas formas de energia – mecânica, química, electroestática, calorifica, nuclear. Num qualquer sistema isolado, a energia pode ser transformada de um tipo para outro tipo de energia, mas a quantidade total de energia é constante, ou seja, conserva-se. Exemplos, i) uma bateria contém energia química que pode ser utilizada para produzir energia mecânica, ii) quando um bloco escorrega sobre uma superfície rugosa, a força de atrito dá origem ao aquecimento do bloco e da superfície. Como resultado, a energia mecânica é transformada em energia térmica, mas a quantidade total de energia conserva-se. Nesta secção estamos interessados em dois tipos de energia mecânica:
• Energia cinética (EC ) (energia do movimento) • Energia potencial ( EP ) (energia da posição)
Forças Conservativas e Não Conservativas
Nem sempre é verdade que o trabalho realizado por uma força externa é armazenado como uma forma de energia potencial. Tal é apenas verdade se a força fôr conservativa, onde é válida a relação:
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 48 Folhas de apoio - versão 03-2003
| ( ) ( )B
P PA
W F dr E A E B= = −∫r r
Definição: o trabalho que uma força conservativa realiza num objecto que se move de A para B, é independente do caminho – apenas depende dos pontos extremos do movimento. Para uma força não conservativa (ou dissipativa), o trabalho realizado no movimento de A para B depende do cominho efectuado (a força de atrito e a resistência do ar são alguns exemplos).
A conservação da energia mecânica
Já verificamos que o trabalho realizado por uma força conservativa pode ser expresso como uma variação da energia potencial. Quando um objecto se desloca sob a acção de força conservativas, o princípio do trabalho e da energia pode ser escrito como EP(A) - EP(B) = EC(B) - EC(A) ⇔ EP(A) + Ec(A) = EP(B) + EC(B) Tal significa que quando um objecto se desloca sob a acção de forças conservativas, a soma da sua energia cinética e da sua energia potencial se mantém constante. Quando todas as forças que actuam num corpo são conservativas, a quantidade, Em = Ec + EP conserva-se durante o movimento e designa-se por energia mecânica.
Forças não conservativas e o princípio do trabalho e da energia
Se existem forças não conservativas então a energia mecânica não se conserva, e escreve-se, W = Wnc + Wc = Ec(f) – Ec(i) Em que Wnc representa o trabalho das forças não conservativas e Wc o trabalho das forças conservativas. Sendo,
Wc = EP(i)-EP(f) Temos, Wnc = (Ec(f) – Ec(i)) + (EP(f)-EP(i)) = ∆EC + ∆EP = ∆(EC + EP) = ∆Em
Ou seja, o trabalho realizado por uma força não conservativa é igual à variação de energia mecânica.

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 49 Folhas de apoio - versão 03-2003
Potência e rendimento mecânico
Potência (P) A potência é o trabalho realizado por unidade de tempo, ou a quantidade de trabalho realizado por segundo, ou seja,
dW
Pdt
= (Watt – W, 1W = 1J/s=Nm/s)
Sabendo-se que, dW F|dr=r r
, então,
dW F |d r dr
P F | F | vdt dt dt
= = = =r r rr r r
para Fr
constante.
Rendimento Mecânico (ηη) O rendimento mecânico é dado pela razão entre o trabalho realizado e o absorvido, ou seja,
realizado
absorvido
W1
Wη = <
sendo o rendimento sempre inferior à unidade. Este assunto será mais desenvolvido aquando do capítulo dedicado à termodinâmica. Esta definição pressupõe que o trabalho seja realizado a uma razão constante. Se o rendimento mecânico é dado pela razão apresentada, logo também será igual à razão entre as suas taxas de variação temporal, isto é,
realizado
absorvido
P1
Pη = <

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 50 Folhas de apoio - versão 03-2003
Quantidade de Movimento
A quantidade de movimento é definida como:
P mv=r r
[kgm/s] Tendo em consideração a 2ª Lei de newton,
F ma=∑r r
pode-se escrever,
dv d dPF m (mv)
dt dt dt
dPF
dt
= = =
⇔ =
∑
∑
rrr rrr
isto é, a força resultante é igual à taxa de variação da quantidade de movimento. Graficamente, temos,
Princípio da conservação da quantidade de movimento O princípio diz-nos que perante a ausência de forças externas aplicadas às massas, ou seja, se a a soma das forças externas fôr nula, a quantidade de movimento permanece constante. Então temos,
F 0 P cte= ⇒ =∑r r
vr
Pr
m
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 51 Folhas de apoio - versão 03-2003
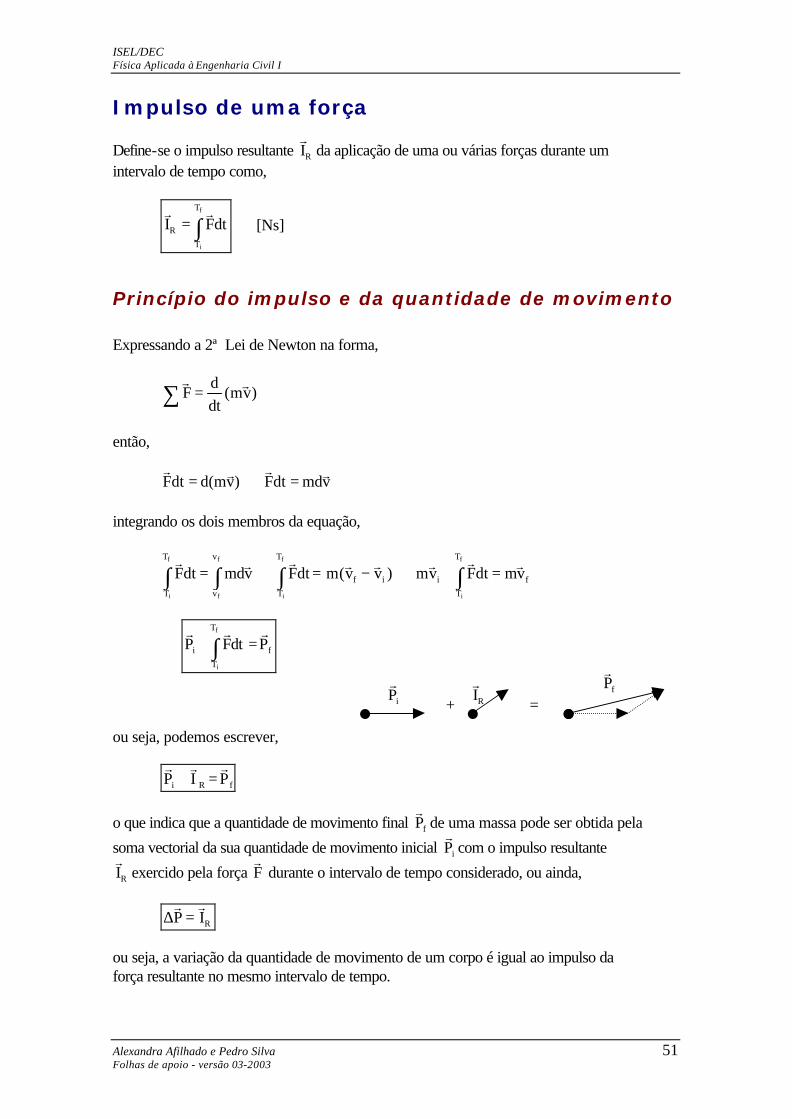
Impulso de uma força
Define-se o impulso resultante RIr
da aplicação de uma ou várias forças durante um intervalo de tempo como,
f
i
T
R
T
I Fdt= ∫r r
[Ns]
Princípio do impulso e da quantidade de movimento Expressando a 2ª Lei de Newton na forma,
dF (mv)
dt=∑
r r
então, Fdt d(mv) Fdt mdv= ⇔ =
r rr r
integrando os dois membros da equação,
f f f f
i f i i
T v T T
f i i f
T v T T
Fdt mdv Fdt m(v v ) mv Fdt mv= ⇔ = − ⇔ + =∫ ∫ ∫ ∫r r rr r r r r
⇔
⇔ f
i
T
i f
T
P Fdt P+ =∫r r r
ou seja, podemos escrever,
i R fP I P+ =r r r
o que indica que a quantidade de movimento final fPr
de uma massa pode ser obtida pela
soma vectorial da sua quantidade de movimento inicial iPr
com o impulso resultante
RIr
exercido pela força Fr
durante o intervalo de tempo considerado, ou ainda,
RP I∆ =r r
ou seja, a variação da quantidade de movimento de um corpo é igual ao impulso da força resultante no mesmo intervalo de tempo.
iPr
RIr
+ = fP
r

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 52 Folhas de apoio - versão 03-2003
Considerando o princípio da quantidade de movimento em coordenadas cartesianas, componente a componente, temos,
f
i
f
i
f
i
T
xi x xf
T
T
yi y yf
T
T
zi z zf
T
mv F dt mv
mv F dt mv
mv F dt mv
+ =
+ =
+ =
∫
∫
∫
Quando o F 0=∑r
, resulta RIr
=0, logo a quantidade de movimento conserva-se, ou
seja, de, i R fP I P+ =r r r
, com RIr
=0, resulta, i fP P=
r r
Se um sistema envolve duas ou mais partículas, deve considerar-se a soma vectorial das respectivas quantidades de movimento e impulso. Contudo, tendo em conta que as forças de acção – reacção exercidas pelas partículas entre si formam pares de forças iguais e de sentidos opostos, levando a que os impulsos exercidos por estas forças se cancelem entre si, restam apenas os impulsos originados pelas forças externas, ou seja,
i R externas fP I P−+ =∑ ∑ ∑r r r
o qual se reduz a:
i fP P=∑ ∑r r
para um sistema isolado (ou seja, sistema para o qual não existe interacções com forças exteriores). Esta última equação traduz a conservação da quantidade de movimento total das partículas.
Movimento Impulsivo Def: Movimento sob a acção de forças impulsivas que têm uma elevada intensidade, embora actuem num intervalo de tempo muito curto.
I F t ( F cte)∆∑ ∑r r
; ;
Os impulsos de forças não impulsivas podem em geral ser desprezados no movimento impulsivo, como exemplos, o peso do corpo, força exercida por uma mola,... Aquando do movimento impulsivo, podemos escrever o princípio do impulso e da quantidade de movimento, como,
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 53 Folhas de apoio - versão 03-2003
i fP F t P+ ∆ =∑r r r
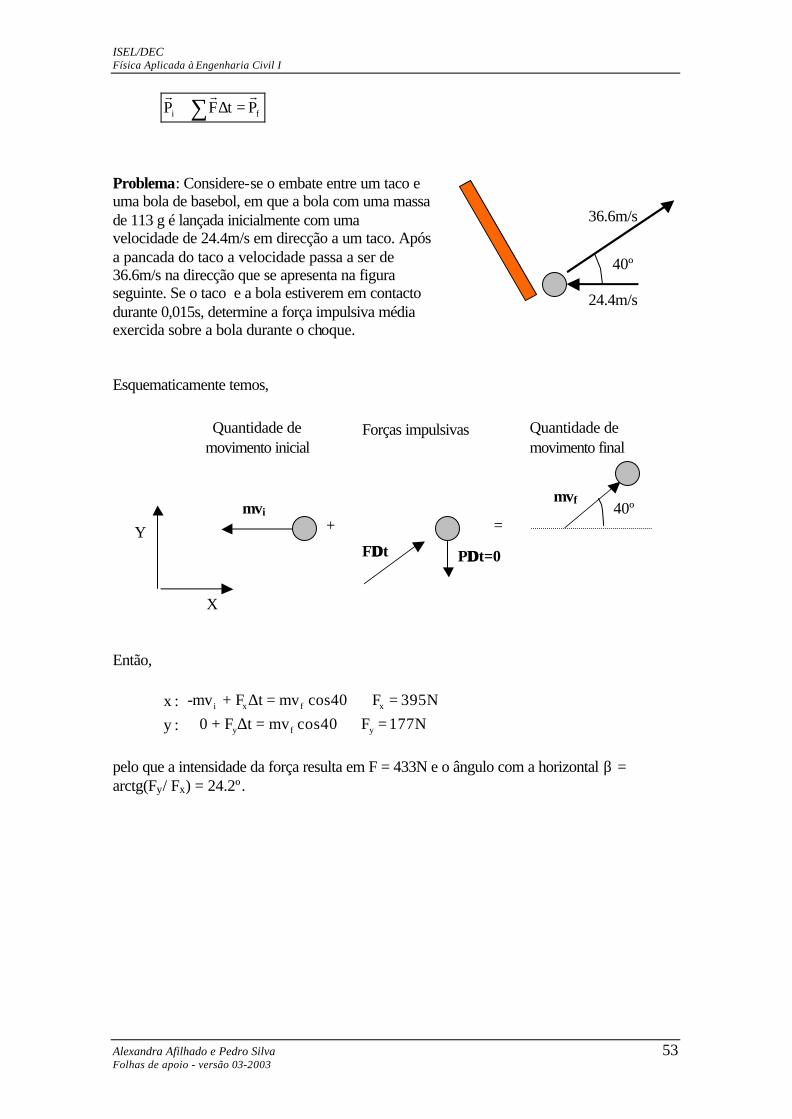
Problema: Considere-se o embate entre um taco e uma bola de basebol, em que a bola com uma massa de 113 g é lançada inicialmente com uma velocidade de 24.4m/s em direcção a um taco. Após a pancada do taco a velocidade passa a ser de 36.6m/s na direcção que se apresenta na figura seguinte. Se o taco e a bola estiverem em contacto durante 0,015s, determine a força impulsiva média exercida sobre a bola durante o choque. Esquematicamente temos, Então,
i x f x
y f y
-mv + F t = mv cos40 F 395Nx :
0 + F t = mv cos40 F 177Ny :
∆ ⇔ = ∆ ⇔ =
pelo que a intensidade da força resulta em F = 433N e o ângulo com a horizontal β = arctg(Fy/ Fx) = 24.2º.
40º
24.4m/s
36.6m/s
+ =
Quantidade de movimento inicial
Forças impulsivas
P∆∆ t=0 F∆∆ t
40º
Quantidade de movimento final
mvi mvf
X
Y

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 54 Folhas de apoio - versão 03-2003
Choques ou Colisões
Utiliza-se o termo choque para representar a colisão entre dois corpos num intervalo de tempo muito curto. Aquando do choque os corpos produzem forças impulsivas em cada um. Estas forças assumem-se como muito mais elevadas do que qualquer outra força externa. As forças internas ao sistema de duas partículas são forças impulsivas enquanto que as forças externas não o são, logo estamos em condições de conservação da quantidade de movimento, ou seja (verifique figura),
antes do choque depois do choque
´ ´a a b b a a b b
P P
ou
P P '
ou
m v m v m v m v
=
=
+ = +
∑ ∑
∑ ∑
r r
r r
r r r r
Observação: Aquando da resolução de problemas relativos a colisões, usa-se para simplificação da resolução um sistema de eixos ortogonais (nc, tc), como se apresenta na figura ao lado, onde, nc – corresponde ao eixo normal comum às superfícies dos dois corpos, e tc – corresponde ao eixo tangente comum às superfícies de contacto.
Colisões centrais Diz-se que estamos perante um choque ou colisão central quando os centros de massa dos corpos que colidem estão alinhados segundo a normal de choque (nc). As colisões podem ainda ser divididas em colisão central directa e colisão central obliqua, consoante as velocidades das duas partículas que colidem se encontram ou não alinhadas com a nc.
Colisão central directa Define-se colisão central directa quando os centros de massa e as velocidades dos dois corpos que colidem estão alinhadas segundo a nc.
ma
va vb
mb
va’ vb’
nc
tc
nc vb va
va // vb // nc
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 55 Folhas de apoio - versão 03-2003
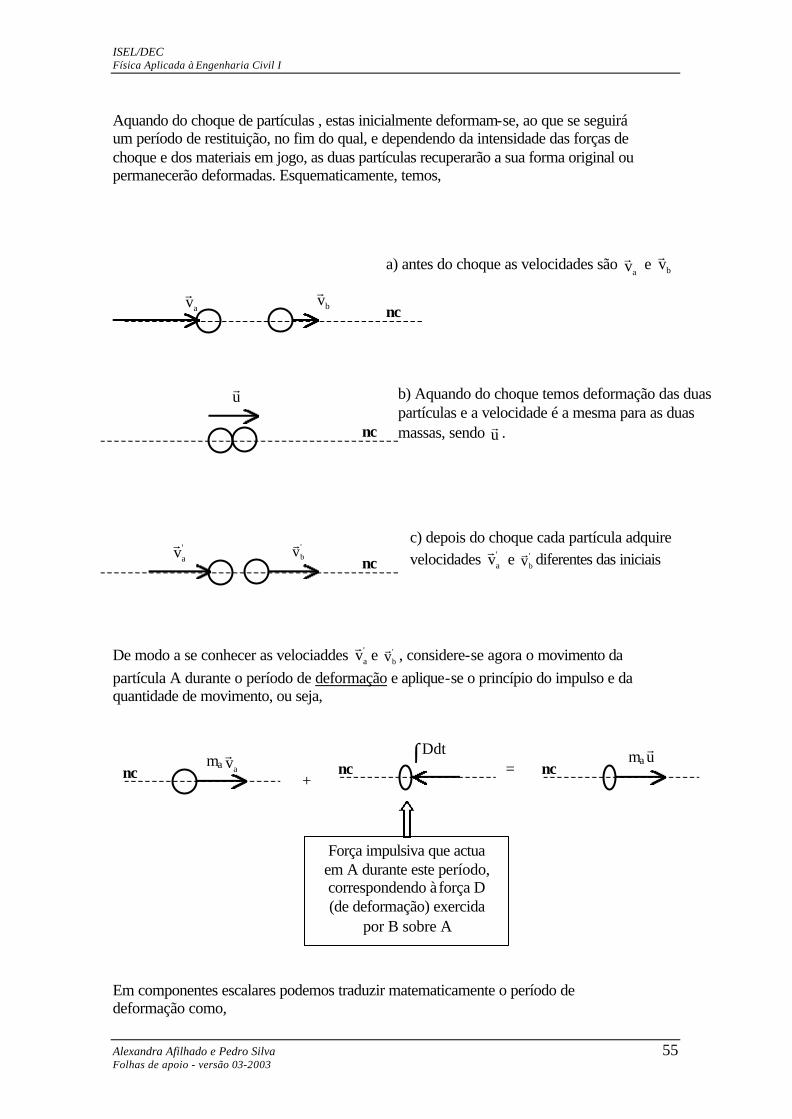
Aquando do choque de partículas , estas inicialmente deformam-se, ao que se seguirá um período de restituição, no fim do qual, e dependendo da intensidade das forças de choque e dos materiais em jogo, as duas partículas recuperarão a sua forma original ou permanecerão deformadas. Esquematicamente, temos, De modo a se conhecer as velociaddes '
avr
e 'bv
r , considere-se agora o movimento da
partícula A durante o período de deformação e aplique-se o princípio do impulso e da quantidade de movimento, ou seja, Em componentes escalares podemos traduzir matematicamente o período de deformação como,
nc bvr
avr
nc
ur
nc 'bv
r'av
r
a) antes do choque as velocidades são av
r e bvr
b) Aquando do choque temos deformação das duas partículas e a velocidade é a mesma para as duas massas, sendo u
r .
c) depois do choque cada partícula adquire velocidades '
avr
e 'bv
r diferentes das iniciais
nc Ddt∫
+ nc ma av
r = nc
ma ur
Força impulsiva que actua em A durante este período, correspondendo à força D (de deformação) exercida
por B sobre A
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 56 Folhas de apoio - versão 03-2003
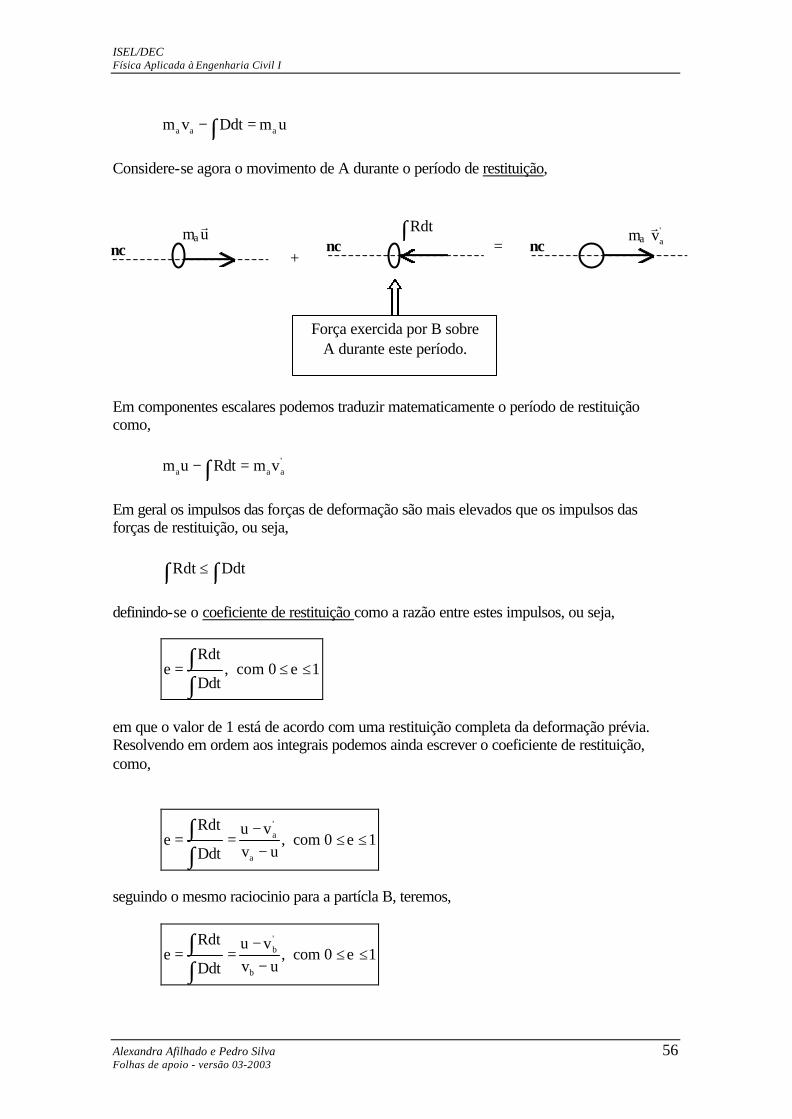
a a am v Ddt m u− =∫
Considere-se agora o movimento de A durante o período de restituição, Em componentes escalares podemos traduzir matematicamente o período de restituição como, '
a a am u Rdt m v− =∫
Em geral os impulsos das forças de deformação são mais elevados que os impulsos das forças de restituição, ou seja, Rdt Ddt≤∫ ∫
definindo-se o coeficiente de restituição como a razão entre estes impulsos, ou seja,
Rdt
e , com 0 e 1Ddt
= ≤ ≤∫∫
em que o valor de 1 está de acordo com uma restituição completa da deformação prévia. Resolvendo em ordem aos integrais podemos ainda escrever o coeficiente de restituição, como,
'a
a
Rdt u ve , com 0 e 1
v uDdt
−= = ≤ ≤
−∫∫
seguindo o mesmo raciocinio para a partícla B, teremos,
'b
b
Rdt u ve , com 0 e 1
v uDdt
−= = ≤ ≤
−∫∫
nc Rdt∫
+ nc ma u
r
= nc ma
'av
r
Força exercida por B sobre A durante este período.
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 57 Folhas de apoio - versão 03-2003
sendo os coeficientes de restituição para A e B iguais também o serão os quociente da adição, ou seja,
( ) ( )( ) ( )
' ' ' 'a b b a
a b a b
u v v u v ve =
v u u v v v
− + − −= ⇔
− + − −
⇔ ' 'b a a bv v e(v v )− = −
ou seja, a velocidade relativa das duas partículas depois do choque pode ser obtida pela multiplicação da velocidade relativa antes do choque pelo coeficiente de restituição. Casos particulares 1 – Choque perfeitamente plástico (e = 0) Para um choque deste tipo não existe período de restituição, pelo que, considerando a última equação se verifica que as partículas depois do choque mantêm-se juntas, ou seja, e = 0 ⇒ va’ = vb’ = v’ Substituindo esta igualdade na equação que traduz a conservação da quantidade de movimento total das partículas, escrevemos, P = cte ⇔ mava + mbvb = (ma + mb)v’ 2 – choque perfeitamente elástico (e = 1) Para este tipo de condição verifica-se através das equação que define o coeficiente de restituição que os impulsos de deformação e restituiçao são iguais. Neste caso, depois do choque os corpos afastam-se com a mesma velocidade relativa que tinham antes do choque, ou seja, para e = 1, temos,
va - vb = vb’ - va’ ⇔ va + va’ = vb’ + vb (*) É importante salientar que para um choque perfeitamente elástico, não só se conserva,
i) a quantidade de movimento total das duas partículas (como já se verificou para um choque perfeitamente plástico).
mas também ii) a energia total das partículas.
Sendo a quantidade de movimento (P) constante, então podemos escrever,

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 58 Folhas de apoio - versão 03-2003
mava + mbvb = mava’+ mbvb’ ⇔ ma(va - va’) = mb(vb’ - vb) multiplicando membro a membro a equação anterior com a equação (*), temos,
ma(va - va’) × (va + va’) = mb(vb’ - vb) × (vb’ + vb) ⇔ ⇔ mava
2 - ma(va’)2 = mb(vb’)
2 - mbvb2
reordenando os membros da equação e multiplicando por ½, vem,
2 2 ' 2 ' 2a a b b a a b b
1 1 1 1m v + m v = m (v ) + m (v )
2 2 2 2
equação esta que traduz a conservação da energia cinética total das partículas para um choque perfeitamente elástico. Observação: No caso geral do choque, isto é, quando e ≠ 1, a energia total das partículas não se conserva. A energia cinética perdida é em parte transformada em calor e em parte gasta na criação de ondas elásticas que se propoagam no interior dos corpos em colisão.
Colisão central oblíqua (partículas em movimento livre) Define-se colisão central oblíqua quando os centros de massa e as velocidades dos dois corpos que colidem não estão alinhados segundo a nc, como se pode observar através da figura que se apresenta ao lado. Admitindo que as superfícies são lisas e sem atrito as únicas forças impulsivas que ocorrem durante o choque são as forças internas dirigidas segundo a normal de choque (nc), como ilustrado na figura imediatamente abaixo.
ma
va vb
mb
va’ vb’ nc
tc
+ = nc
ma avr
tc
mb bvr
nc
tc
F t∆r
- F t∆r
nc
ma'av
r
tc
mb'bv
r
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 59 Folhas de apoio - versão 03-2003
Então perante as condições da colisão temos,
i) não existindo qualquer tipo de atrito e sabendo que as forças impulsivas estão dirigidas segunda a nc, então existe conservação da quantidade de movimento ao longo do eixo tc para cada partícula isoladamente. Logo,
(va)tc = (va’)tc porque (Pa)tc = cte (vb)tc = (vb’)tc porque (Pb)tc = cte
ii) conservação da quantidade de movimento total (para as duas partículas) ao
longo da nc
ma(va)nc + mb(vb)nc = ma(va’)nc + mb(vb’)nc porque (Pa)nc + (Pb)nc = cte
iii) Da relação já verificada anteriormente para o coeficiente de restituição, temos também válida a equação,
' 'b nc a nc a nc b nc(v ) (v ) e[(v ) (v ) ]− = −
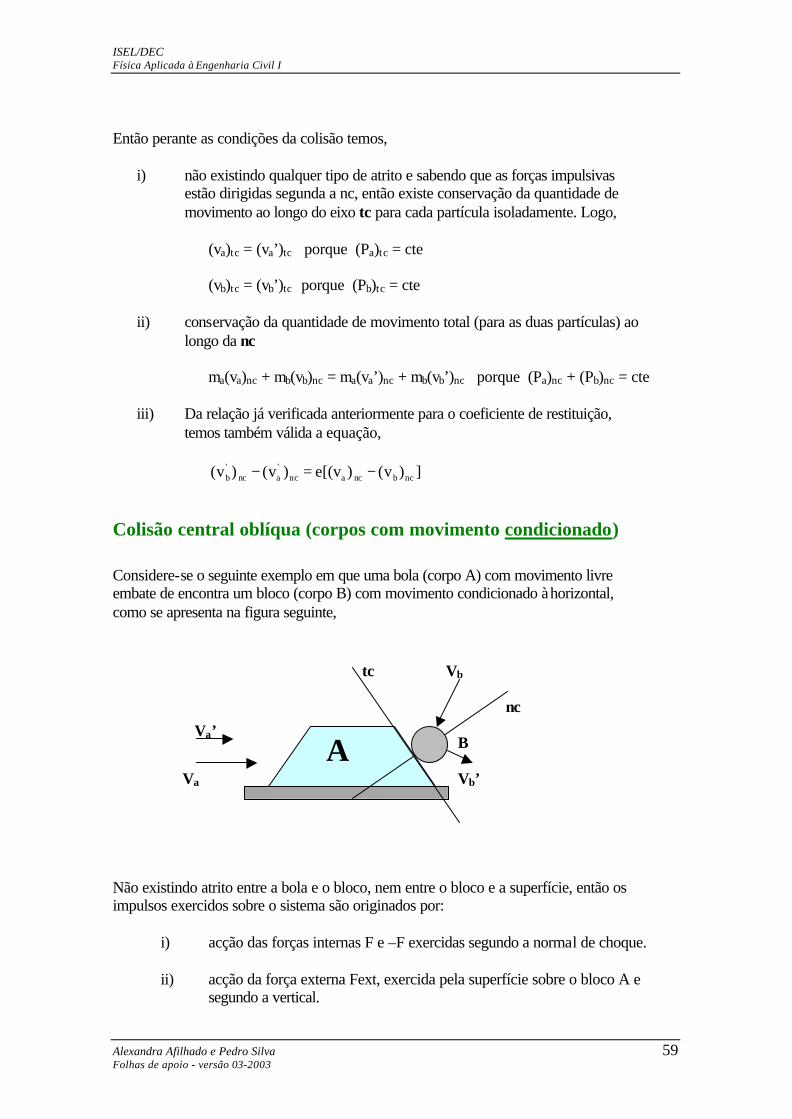
Colisão central oblíqua (corpos com movimento condicionado) Considere-se o seguinte exemplo em que uma bola (corpo A) com movimento livre embate de encontra um bloco (corpo B) com movimento condicionado à horizontal, como se apresenta na figura seguinte, Não existindo atrito entre a bola e o bloco, nem entre o bloco e a superfície, então os impulsos exercidos sobre o sistema são originados por:
i) acção das forças internas F e –F exercidas segundo a normal de choque. ii) acção da força externa Fext, exercida pela superfície sobre o bloco A e
segundo a vertical.
A B
tc
nc
Va
Va’
Vb’
Vb
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 60 Folhas de apoio - versão 03-2003
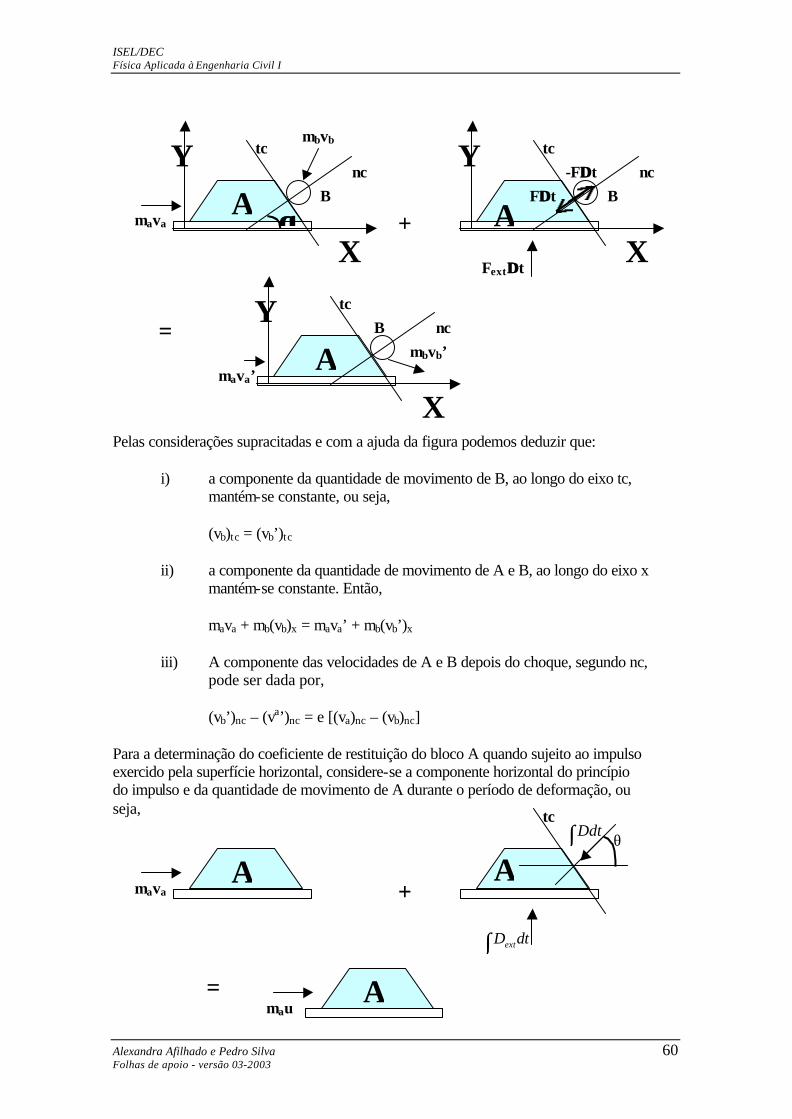
Pelas considerações supracitadas e com a ajuda da figura podemos deduzir que:
i) a componente da quantidade de movimento de B, ao longo do eixo tc, mantém-se constante, ou seja,
(vb)tc = (vb’)tc
ii) a componente da quantidade de movimento de A e B, ao longo do eixo x
mantém-se constante. Então,
mava + mb(vb)x = mava’ + mb(vb’)x
iii) A componente das velocidades de A e B depois do choque, segundo nc, pode ser dada por,
(vb’)nc – (va’)nc = e [(va)nc – (vb)nc]
Para a determinação do coeficiente de restituição do bloco A quando sujeito ao impulso exercido pela superfície horizontal, considere-se a componente horizontal do princípio do impulso e da quantidade de movimento de A durante o período de deformação, ou seja,
A B
tc
nc
mava
mbvb
X
Y
θθ AB
tc
nc
X
Y
Fext∆∆ t
F∆∆ t
-F∆∆ t
+
AB
tc
nc
mava’
mbvb’
X
Y =
Amava +
A
tc
extD dt∫
Ddt∫ θ
Amau
=

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 61 Folhas de apoio - versão 03-2003
Pela análise do esquema gráfico temos para o período de deformação,
( )a a am v Ddt cos m u− θ =∫
e para o período de restituição,
( ) 'a a am u Rdt cos m v− θ =∫
resultando por conseguinte o coeficiente de restituição em,
'a
a
Rdt u ve
v uDdt
−= =
−∫∫
ou multiplicando todas as velocidades por cos(θ) de modo a se obter a sua componente segundo projectada ao longo de nc, temos,
( )
( )'
nc a nc
a ncnc
u ve
v u
−=
−
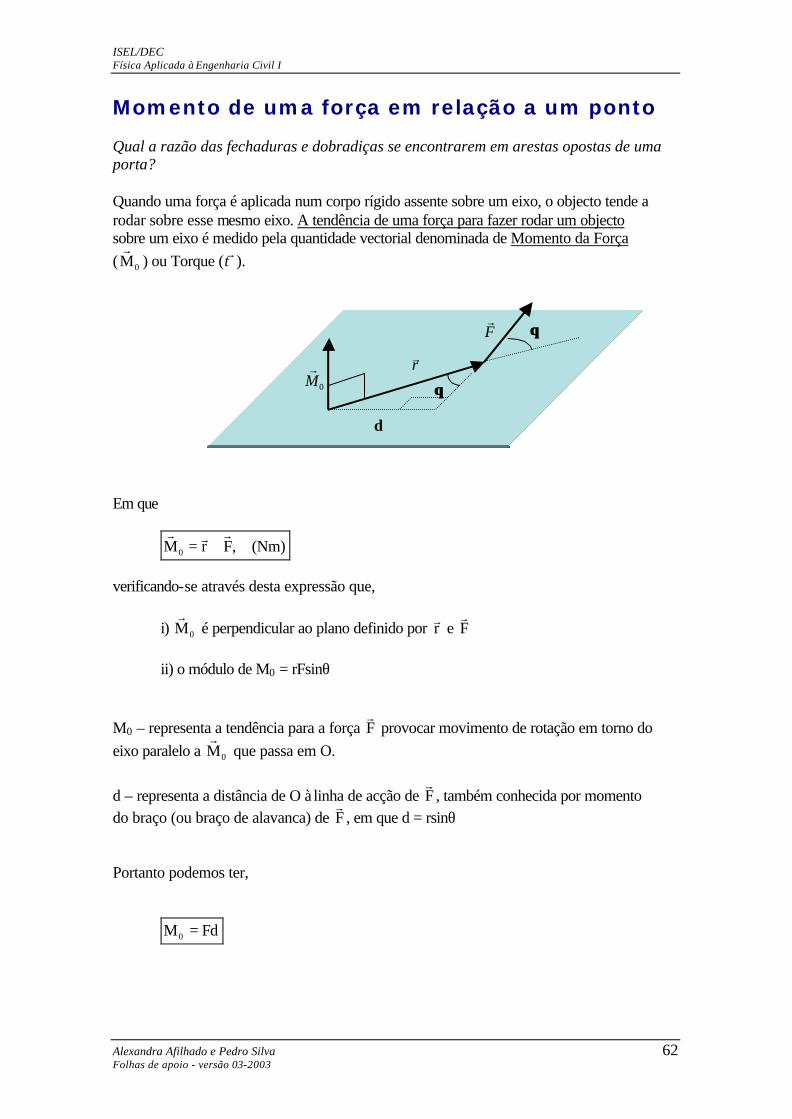
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 62 Folhas de apoio - versão 03-2003
Momento de uma força em relação a um ponto
Qual a razão das fechaduras e dobradiças se encontrarem em arestas opostas de uma porta? Quando uma força é aplicada num corpo rígido assente sobre um eixo, o objecto tende a rodar sobre esse mesmo eixo. A tendência de uma força para fazer rodar um objecto sobre um eixo é medido pela quantidade vectorial denominada de Momento da Força
( 0Mr
) ou Torque (τr
). Em que
0M r F, (Nm)= ∧r rr
verificando-se através desta expressão que,
i) 0Mr
é perpendicular ao plano definido por rr
e Fr
ii) o módulo de M0 = rFsinθ M0 – representa a tendência para a força F
r provocar movimento de rotação em torno do
eixo paralelo a 0Mr
que passa em O.
d – representa a distância de O à linha de acção de Fr
, também conhecida por momento do braço (ou braço de alavanca) de F
r, em que d = rsinθ
Portanto podemos ter,
0M = Fd
Fr
d
θθ
θθ
rr0M
r
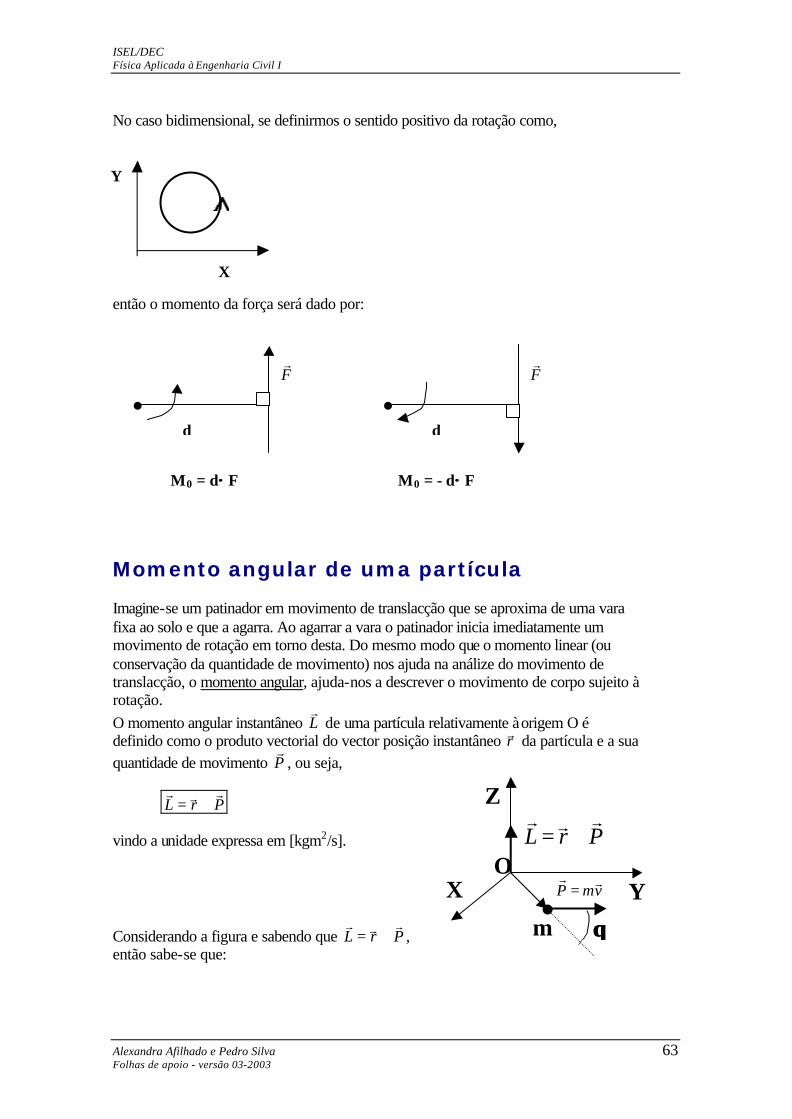
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 63 Folhas de apoio - versão 03-2003
No caso bidimensional, se definirmos o sentido positivo da rotação como, então o momento da força será dado por:
Momento angular de uma partícula
Imagine-se um patinador em movimento de translacção que se aproxima de uma vara fixa ao solo e que a agarra. Ao agarrar a vara o patinador inicia imediatamente um movimento de rotação em torno desta. Do mesmo modo que o momento linear (ou conservação da quantidade de movimento) nos ajuda na análize do movimento de translacção, o momento angular, ajuda-nos a descrever o movimento de corpo sujeito à rotação.
O momento angular instantâneo Lr
de uma partícula relativamente à origem O é definido como o produto vectorial do vector posição instantâneo rr da partícula e a sua quantidade de movimento P
r, ou seja,
L r P= ∧r rr
vindo a unidade expressa em [kgm2/s].
Considerando a figura e sabendo que L r P= ∧r rr
, então sabe-se que:
X
Y
Fr
d
Fr
d
M0 = d×× F M0 = - d×× F
m
Y O
P mv=r r
θθ
L r P= ∧r rr
Z
X

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 64 Folhas de apoio - versão 03-2003
i) o momento angular Lr
é perpendicular ao plano definido pelos vectores
rr e Pr
. ii) O módulo do momento angular L, vem dado por, L = rPsinθ = rmvsinθ,
onde θ é o ângulo entre rr e Pr
Aquando do estudo do movimento de translacção verificou-se que o confunto de forças aplicadas a uma partícula era igual à taxa de variação do momento linear. Pretende-se agora transpor a mesma ideia para a taxa de variação do momento angular. Pretendendo-se então avaliar a variação temporal do momento angular, temos,
0( )dL d dP drr P r P r F v P Mdt dt dt dt
= ∧ = ∧ + ∧ = ∧ + ∧ =r r rr r r r rr r r r
já que,
dPF madt
= =rr r
, 0M r F= ∧r rr
e vr // Pr
Então verifica-se que a soma dos momentos das forças que actuam numa partícula é igual à taxa de variação temporal do momento angular da partícula, ou seja,
0
dLMdt
=∑rr
De salientar que esta equação só é válida se 0M∑r
e Lr
são medidos em torno da
mesmo ponto fixo. Se o momento das forças é nulo, então verifica-se a conservação do momento angular, ou seja,
0 0 0dLM L ctedt
= ⇒ = ⇒ =∑rr r
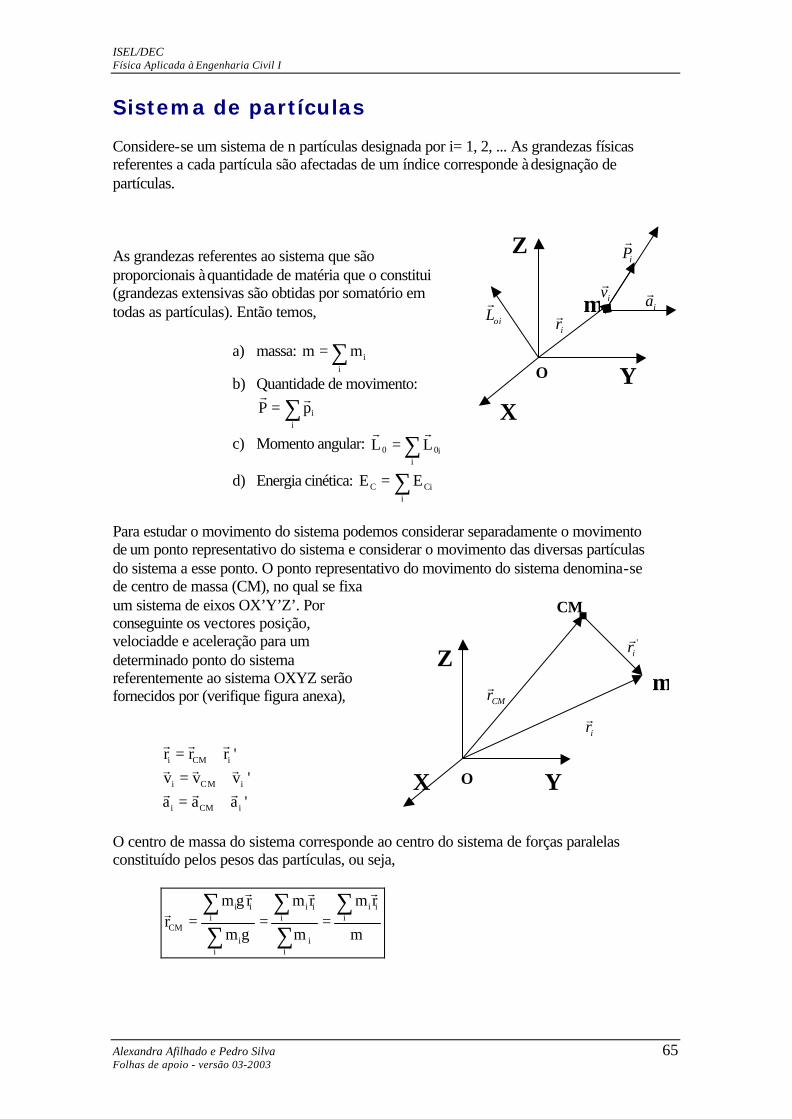
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 65 Folhas de apoio - versão 03-2003
Sistema de partículas
Considere-se um sistema de n partículas designada por i= 1, 2, ... As grandezas físicas referentes a cada partícula são afectadas de um índice corresponde à designação de partículas. As grandezas referentes ao sistema que são proporcionais à quantidade de matéria que o constitui (grandezas extensivas são obtidas por somatório em todas as partículas). Então temos,
a) massa: ii
m m= ∑
b) Quantidade de movimento:
ii
P p= ∑r r
c) Momento angular: 0 0ii
L L= ∑r r
d) Energia cinética: C Cii
E E= ∑
Para estudar o movimento do sistema podemos considerar separadamente o movimento de um ponto representativo do sistema e considerar o movimento das diversas partículas do sistema a esse ponto. O ponto representativo do movimento do sistema denomina-se de centro de massa (CM), no qual se fixa um sistema de eixos OX’Y’Z’. Por conseguinte os vectores posição, velociadde e aceleração para um determinado ponto do sistema referentemente ao sistema OXYZ serão fornecidos por (verifique figura anexa),
i CM i
i CM i
i CM i
r r r '
v v v '
a a a '
= += += +
r r rr r rr r r
O centro de massa do sistema corresponde ao centro do sistema de forças paralelas constituído pelos pesos das partículas, ou seja,
i i i i i ii i i
CM
i ii i
m g r m r m rr
m g m m= = =
∑ ∑ ∑∑ ∑
r r rr
O
Z
Y
X
irr
iar iPr
ivr m
oiL
r
O
CM
Z
YX
m
irr
'irr
CMrr
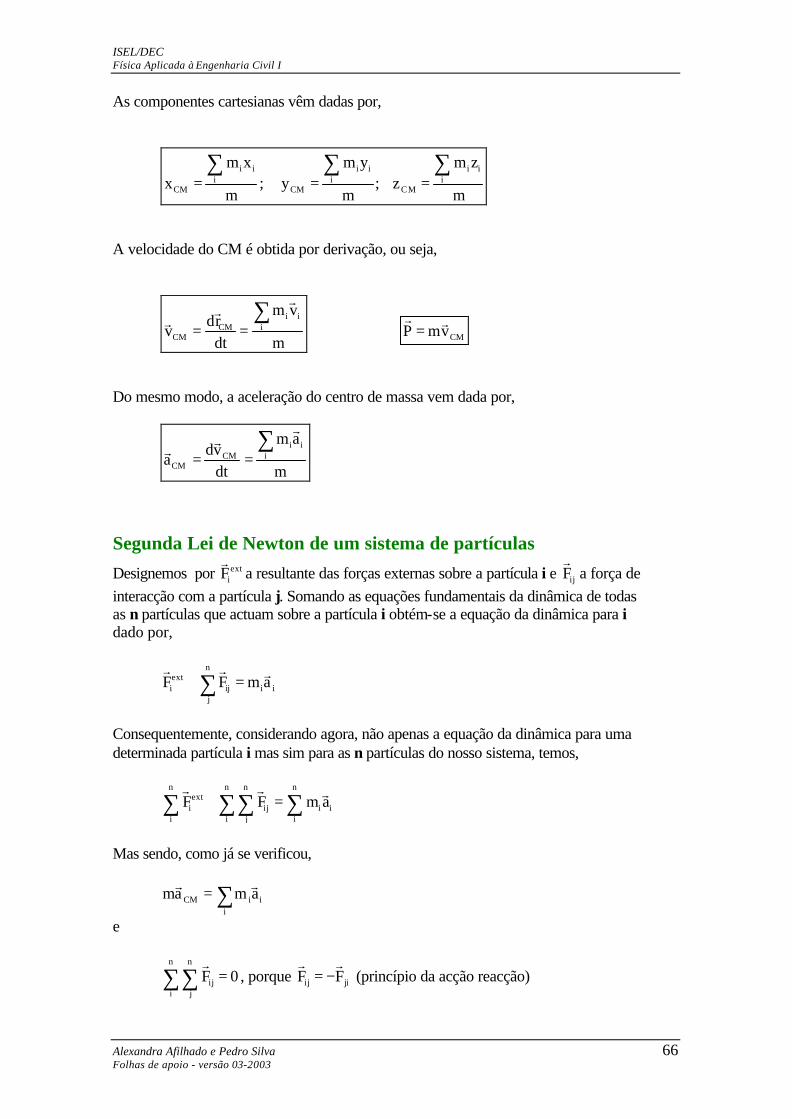
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 66 Folhas de apoio - versão 03-2003
As componentes cartesianas vêm dadas por,
i i i i i ii i i
CM CM CM
m x m y m zx ; y ; z
m m m= = =
∑ ∑ ∑
A velocidade do CM é obtida por derivação, ou seja,
i iCM i
CM
m vdr
vdt m
= =∑ rrr
⇒ CMP mv=r r
Do mesmo modo, a aceleração do centro de massa vem dada por,
i i
CM iCM
m adv
adt m
= =∑ rrr
Segunda Lei de Newton de um sistema de partículas
Designemos por extiF
ra resultante das forças externas sobre a partícula i e ijF
ra força de
interacção com a partícula j. Somando as equações fundamentais da dinâmica de todas as n partículas que actuam sobre a partícula i obtém-se a equação da dinâmica para i dado por,
n
exti ij i i
j
F F m a+ =∑r r r
Consequentemente, considerando agora, não apenas a equação da dinâmica para uma determinada partícula i mas sim para as n partículas do nosso sistema, temos,
n n n n
exti ij i i
i i j i
F F m a+ =∑ ∑∑ ∑r r r
Mas sendo, como já se verificou, CM i i
i
ma m a= ∑r r
e
n n
iji j
F 0=∑∑r
, porque ij jiF F= −r r
(princípio da acção reacção)

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 67 Folhas de apoio - versão 03-2003
resulta,
n
exti CM
i
F ma=∑r r
Verificando-se através desta expressão que o centro de massa move-se como se toda a massa do sistema aí estivesse concentrada e sujeito à força resultante do sistema de forças externas aplicadas às diversas partículas.
Princípio da conservação da quantidade de movimento de um sistema de partículas Sabendo-se que para um sistema de partículas,
i i i CMP P m v mv= = =∑ ∑r r r r
então,
n
exti
i
dPF
dt=∑
rr
Se,
nexti
i
F 0=∑r
,
então,
dP0
dt=
r
e P
r= cte
Se além disso m = cte, também CMv cte=
r, o que traduz a princípio de conservação da
quantidade de movimento do sistema.
Princípio da conservação do momento angular de um sistema de partículas Do mesmo modo se obtém a lei fundamental da dinâmica de rotação para o sistema de partículas. Para duas partículas 1 e 2, tem-se,
01 0101 012 1 1 1 12
02 0202 021 2 2 2 21
ext ext
ext ext
dL dLM M r F r Fdt dt
dL dLM M r F r Fdt dt
+ = ⇔ ∧ + ∧ =
+ = ⇔ ∧ + ∧ =
r rr r r rr rr rr r r rr r

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 68 Folhas de apoio - versão 03-2003
em que 01extM
r corresponde ao momento angular da partícula 1 em torno de O, originado
pelas forças externas e 012Mr
o momento angular originado pela força de interacção entre a partícula 1 e 2 do sistema. Somando as duas espressões anteriores, resulta,
1 1 2 2 1 2 12 01 02( ) ( )ext ext dr F r F r r F L Ldt
∧ + ∧ + − ∧ = +r r r r rr r r r
sendo, 1 2 12( ) 0r r F− ∧ =
rr r, já que, 1 2 12( )//r r F−
rr r conforme se pode observar através da
figura, então,
01 02 01 02( )ext ext dM M L Ldt
+ = +r r r r
Generalizando para um qualquer número de partículas, temos,
00exti
i
dLMdt
=∑rr
Assim verifica-se que a taxa de variação do momento angular do sistema relativamente
a O é igual ao momento resultante das extiF
r, relativamente ao mesmo ponto.
Quando 0 0ext
ii
M =∑r
, então, 0L cte=r
, o que traduz a princípio da conservação do
momento angular do sistema.
Momento angular do sistema relativamente ao Centro de Massa Perante determinadas condições torna-se conveniente considerar o movimento das partículas do sistema em relação a um sistema de eixos baricênctricos, ou seja, a um sistema de eixos centrado no centro de massa CMX’Y’Z’, em translacção relativamente a um referencial Newtoniano OXYZ. Seja o momento angular de uma partícula i relativamente ao centro de massa, dado por,
' ' ' 'CM i i i i iL r P m r v= ∧ = ∧∑ ∑
r rr r
12Fr
1rr
2rr
1 2r r−r r
21Fr
O
O
CM
Z
Y’
Y
X’
X
Z’
i
irr
'irr
CMrr

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 69 Folhas de apoio - versão 03-2003
Considerando a figura, verifica-se que, '
i i CMr r r= −r r r (*)
e claro que, '
i i CMv v v= −r r r (**)
Substituindo a equação (*) na do momento angular temos,
' ' ' ' '( )CM i i i i i i CM i i i i i CML m r v m r v v m r v m r v= ∧ = ∧ − = ∧ − ∧∑ ∑ ∑ ∑r r r r r r r r r
considerando agora a equaçao (**), vem,
' ( )CM i i i i i i CM CML m r v m r m r v= ∧ − − ∧∑ ∑ ∑r r r r r r
sendo, a soma das distâncias ao centro de massa de cada ponto de massa mi nula, ou seja,
0i i i CMm r m r− =∑ ∑r r
resulta,
'CM i i iL m r v= ∧∑
r r r
concluindo-se que o CMLr
pode ser calculado com ivr , ou seja, com a velocidade absoluta da partícula (velocidade realtiva ao sistema de eixos newtoniano). A lei fundamental da dinâmica de rotação, usando o Centro de Massa, é então dada por,
ext CMCMi
dLMdt
=rr
o que nos diz que o momento resultante das forças relativo ao centro de massa é igual à taxa de variação do momento angular do sistema relativo ao centro de massa, em que o momento angular pode ser dado em função das velocidades relativas ao centro de massa ou das velocidades absolutas.

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 70 Folhas de apoio - versão 03-2003
Trabalho realizado pelas forças exteriores e interiores ao sistema
Quando um sistema passa de uma configuração A para uma outra B, o trabalho realizado pelas forças exteriores vem dado por,
|ext extAB i i
i AB
W F dr= ∑ ∫r r
Do mesmo modo, as forças internas realizam trabalho dado por,
int |AB ij ii j AB
W F dr= ∑∑ ∫r r
Prova-se que a soma intext
AB ABW W+ dá a variação de energia cinética do sistema, o que traduz o princípio do trabalho e energia para o sistema, ou seja,
int ( ) ( )extAB AB AB C CW W W E B E A= + = −
As forças internas são frequentemente conservativas e centrais (gravidade, electroestática, elasticidade). Neste caso, o trabalho das forças internas pode ser expresso como a variação da energia potencial interna, ou seja,
int int( ) ( )AB P P PW E A E B E= − = −∆ Em que a energia potencial interna representa fisicamente o trabalho que é necessário realizar entre as intF
rpara todas as partículas em interacção, a partir de uma situação em
que não existia interacção. O princípio do trabalho e da energia pode ser expresso como,
int int
int
ext extAB AB AB AB P C
extAB C P
W W W W E E
W E E U
= + = − ∆ = ∆ ⇔
⇔ = ∆ + ∆ = ∆
com, int
c PU E E= + em que U representa a energia própria do sistema. Se as forças externas também forem conservativas, podemos dizer que ext ext
AB PW E=−∆ e temos por conseguinte, 0ext ext
P PU E U E∆ = −∆ ⇔ ∆ + ∆ = ou seja,

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 71 Folhas de apoio - versão 03-2003
ext
PU E cte+ = quantidade esta que se designa por Energia total do sistema, ou seja,
int extTotal c P PE E E E= + +
a qual se conserva quando as forças são conservativas. A energia cinética pode ser expressa pela soma da energia cinética do CM ( CM
CE ), com
a energia cinética relativa ao CM, designada por energia cinética interna, ( intCE ). Então
seja,
2 '2 2
'2 2
int
1 1( )
2 21 1
2 2
c i i i i CM
c i i i CM
CMC C C
E m v m v v
E m v m v
E E E
= = + ⇔
⇔ = + ⇔
⇔ = +
∑ ∑
∑ ∑
Então a energia total do sistema é,
int int ext CMTotal c P P CE E E E E= + + +
Definindo a energia interna do sistema como, int int
int C PU E E= + resulta a energia total do sistema dada por,
intext CM
Total P CE U E E= + + com,
21
2CMC CME mv=
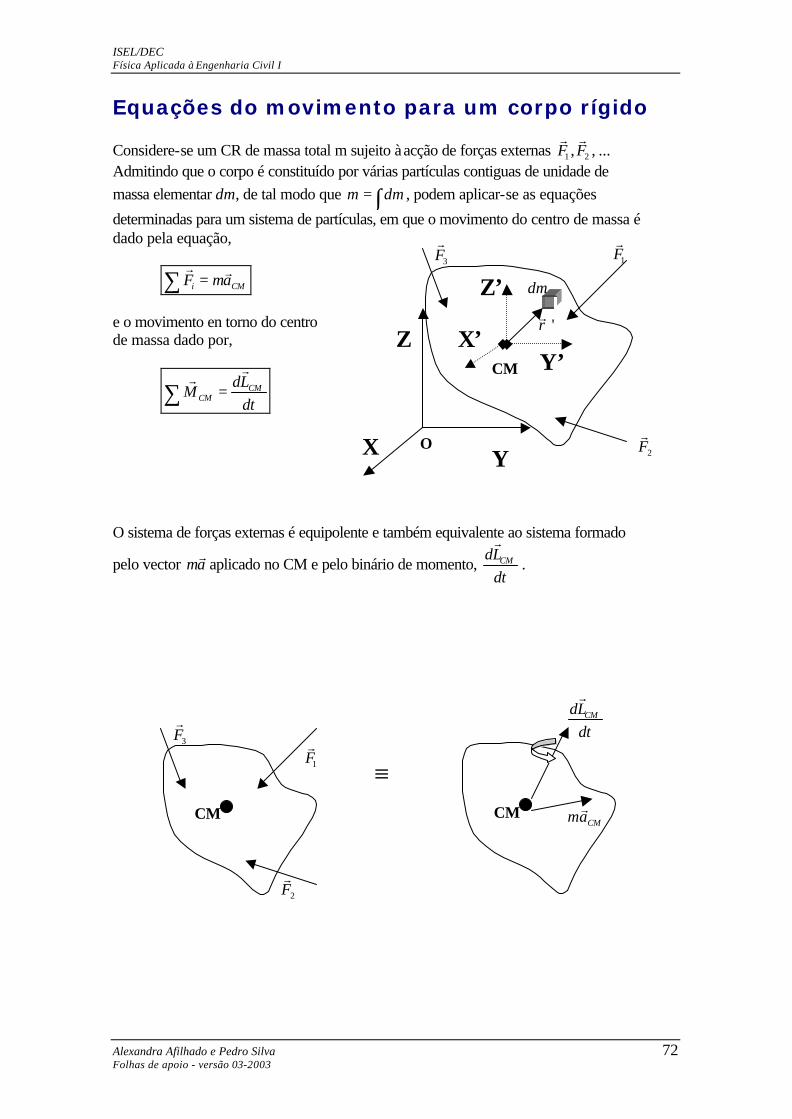
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 72 Folhas de apoio - versão 03-2003
Equações do movimento para um corpo rígido
Considere-se um CR de massa total m sujeito à acção de forças externas 1 2, ,F Fr r
... Admitindo que o corpo é constituído por várias partículas contiguas de unidade de
massa elementar dm, de tal modo que m dm= ∫ , podem aplicar-se as equações
determinadas para um sistema de partículas, em que o movimento do centro de massa é dado pela equação,
i CMF ma=∑r r
e o movimento en torno do centro de massa dado por,
CMCM
dLMdt
=∑rr
O sistema de forças externas é equipolente e também equivalente ao sistema formado
pelo vector mar aplicado no CM e pelo binário de momento, CMdLdt
r.
O
CM
Z Y’
Y
X’
X
Z’
'rr dm
1Fr
3F
r
2Fr
CM
1Fr
3F
r
2Fr
CM
≡
CMmar
CMdLdt
r

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 73 Folhas de apoio - versão 03-2003
Movimento plano Um corpo rígido tem um movimento plano quando cada ponto do campo permanece a uma dada distância constante de um plano de referência fixo.
Momento angular de um corpo rígido em movimento plano Neste subcapítulo ir-se-à prestar atenção ao estudo do movimento de placas planas ou corpo simétricos em relação a um plano de referência. Considere-se por conseguinte uma placa plana em movimento plano. Tenha-se um corpo rígido para o qual r’ = cte e ' 'v r⊥
r r. A velocidade relativa ao CM só tem
componente transversal, isto é, '' ' 'v v r rθ θ ω= = =& O momento angular de dm relativo ao CM é perpendicular ao plano e vem dado por, 2( ')CMdL r dmω= O momento angular do CR em relação ao CM é dado por:
2 2´ ´CM CML dL r dm r dmω ω= = =∫ ∫ ∫
sendo a velocidade angular constante para qualquer ponto do CR. Definindo-se o momento de inércia da placa em torno do eixo perpendicular à placa e que passa no CM como: 2'CMI r dm= ∫
Obtém-se assim: LCM = ICMω Resultando a taxa de variação do momento angular em relação ao centro de massa, como,
CMCM
dL Idt
α=
Este resultado é válido para placas em movimento plano ou para corpos rígidos em movimento plano e simétricos em relação a um plano de referência. Não são válidos para movimentos tridimensionais ou para corpos assimétricos.
O
Y
X
d
m '
irr
CM
X’
Y’ 'vr
θθ
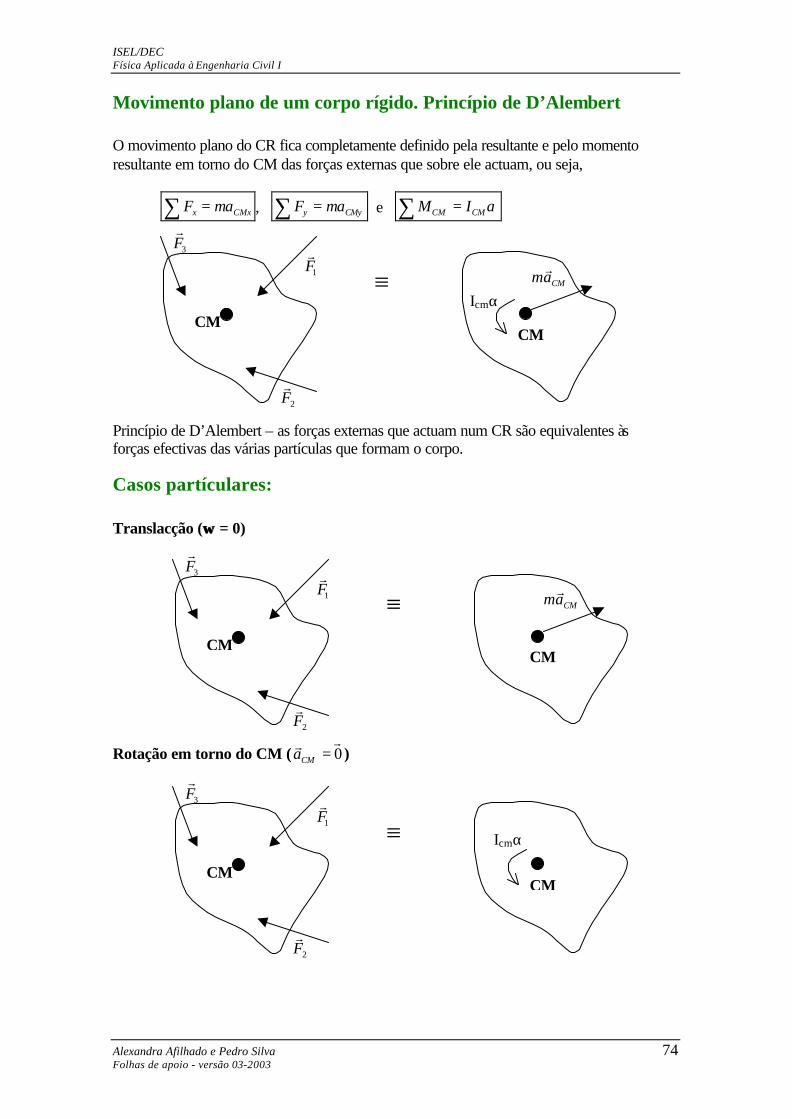
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 74 Folhas de apoio - versão 03-2003
Movimento plano de um corpo rígido. Princípio de D’Alembert O movimento plano do CR fica completamente definido pela resultante e pelo momento resultante em torno do CM das forças externas que sobre ele actuam, ou seja,
x CMxF ma=∑ , y CMyF ma=∑ e CM CMM I α=∑ Princípio de D’Alembert – as forças externas que actuam num CR são equivalentes às forças efectivas das várias partículas que formam o corpo.
Casos partículares: Translacção (ωω = 0)
Rotação em torno do CM ( 0CMa =rr
)
CM
1Fr
3F
r
2Fr
CM
≡ CMmar
Icmα
CM
1Fr
3F
r
2Fr
CM
≡ CMmar
CM
1Fr
3F
r
2Fr
CM
≡ Icmα

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 75 Folhas de apoio - versão 03-2003
Movimento plano geral – pode ser sempre obtido pela sobreposição de uma rotação em torno do CM com translacção do CM. O CM de um CR em movimento plano desloca-se como se a massa total do corpo aí estivesse concentrado e como se todas as forças externas aí actuassem. Um CR em movimento plano roda em torno do seu CM como se este ponto fosse fixo.
Rotação em torno de um eixo fixo Quando um corpo roda em torno de um eixo fixo, o CM do corpo descreve uma circunferêmcia centrada no eixo de rotação. Sendo ω a velocidade angular do CM relativamente a O e α a sua aceleração angular, tem-se: (acm)t = rcmα e (acm)n = rcmω2 α é também a aceleração angular do movimento de rotação do corpo em torno do CM. Se calcularmos os momentos relativamente a O das forças e binários representados acima tem-se (com rcm=OCM):
2
0
20 0( )
CM cm cmt CM CM
CM CM
M I r ma I mr
M I mr I
α α α
α α
= + = + ⇔
⇔ = + =∑
∑
sendo I0 o momento de inércia do corpo em relação ao eixo que passa em O. Esta relação, 2
0 CM CMI I mr= + traduz o Teorema de Steiner ou dos eixos paralelos. Quando um corpo tem movimento de rotação em torno de um eixo fixo, a sua velocidade e aceleração angulares de rotação em torno do CM são iguais às velocidade e aceleração angular do CM em torno do eixo fixo e a equação fundamental da dinâmica de rotação para este caso pode escrever-se: 0 oM I α=∑
Movimento de rolamento Rolamento sem escorregamento: a s cmF N a rµ α≤ ⇒ = Rolamento com escorregamento iminente: a s cmF N a rµ α= ⇒ = Rotação com escorregamento: e a c cmF N a rµ α= ⇒ são independentes.
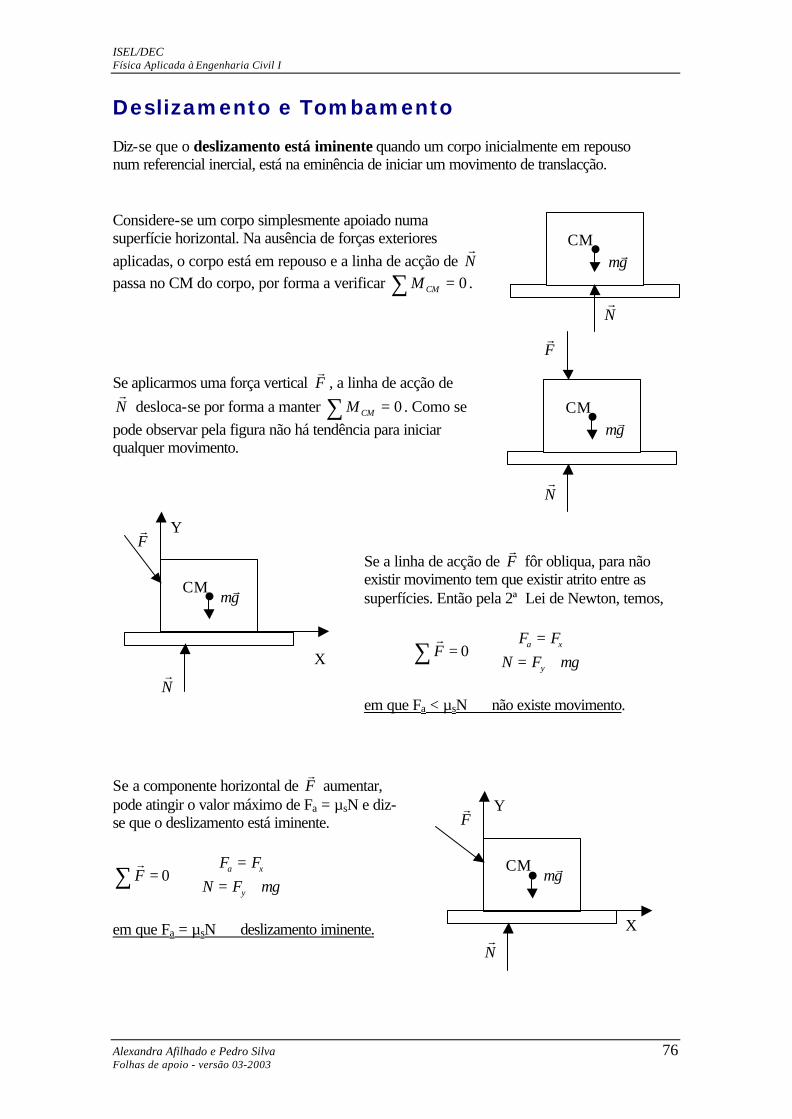
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 76 Folhas de apoio - versão 03-2003
Deslizamento e Tombamento
Diz-se que o deslizamento está iminente quando um corpo inicialmente em repouso num referencial inercial, está na eminência de iniciar um movimento de translacção. Considere-se um corpo simplesmente apoiado numa superfície horizontal. Na ausência de forças exteriores
aplicadas, o corpo está em repouso e a linha de acção de Nr
passa no CM do corpo, por forma a verificar 0CMM =∑ .
Se aplicarmos uma força vertical F
r, a linha de acção de
Nr
desloca-se por forma a manter 0CMM =∑ . Como se
pode observar pela figura não há tendência para iniciar qualquer movimento.
Se a linha de acção de F
r fôr obliqua, para não
existir movimento tem que existir atrito entre as superfícies. Então pela 2ª Lei de Newton, temos,
0a x
y
F FF
N F mg=
= ⇔ = +∑
r
em que Fa < µsN ⇒ não existe movimento.
Se a componente horizontal de Fr
aumentar, pode atingir o valor máximo de Fa = µsN e diz-se que o deslizamento está iminente.
0a x
y
F FF
N F mg=
= ⇔ = +∑
r
em que Fa = µsN ⇒ deslizamento iminente.
Nr
mgr CM
Nr
mgr CM
Fr
Nr
mgr CM
Fr
Y
X
Nr
mgr CM
Fr
Y
X
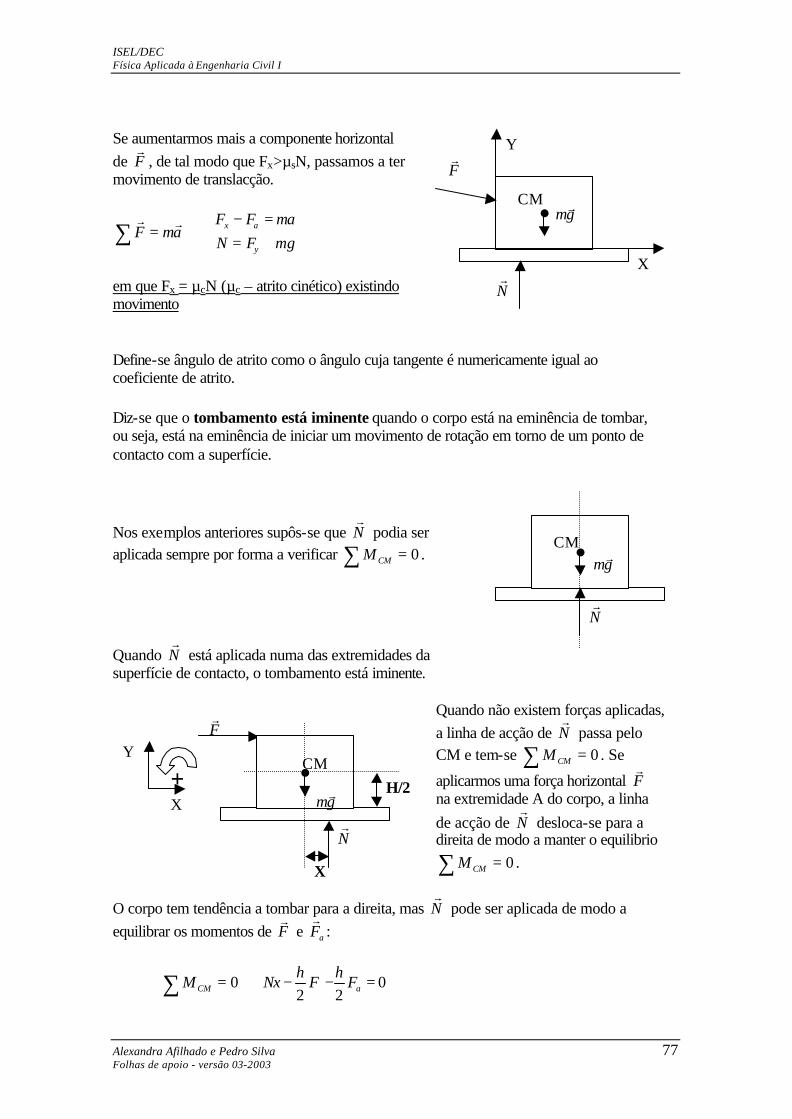
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 77 Folhas de apoio - versão 03-2003
Se aumentarmos mais a componente horizontal
de Fr
, de tal modo que Fx>µsN, passamos a ter movimento de translacção.
x a
y
F F maF ma
N F mg− =
= ⇔ = +∑
r r
em que Fx = µcN (µc – atrito cinético) existindo movimento Define-se ângulo de atrito como o ângulo cuja tangente é numericamente igual ao coeficiente de atrito. Diz-se que o tombamento está iminente quando o corpo está na eminência de tombar, ou seja, está na eminência de iniciar um movimento de rotação em torno de um ponto de contacto com a superfície.
Nos exemplos anteriores supôs-se que Nr
podia ser aplicada sempre por forma a verificar 0CMM =∑ .
Quando Nr
está aplicada numa das extremidades da superfície de contacto, o tombamento está iminente.
Quando não existem forças aplicadas,
a linha de acção de Nr
passa pelo CM e tem-se 0CMM =∑ . Se
aplicarmos uma força horizontal Fr
na extremidade A do corpo, a linha
de acção de Nr
desloca-se para a direita de modo a manter o equilibrio
0CMM =∑ .
O corpo tem tendência a tombar para a direita, mas Nr
pode ser aplicada de modo a
equilibrar os momentos de Fr
e aFr
:
0 02 2
CM ah hM Nx F F= ⇔ − − =∑
Nr
mgr CM
Fr
Y
X
Nr
mgr CM
Fr
Nr
mgr
CM
H/2
X
Y
X
+
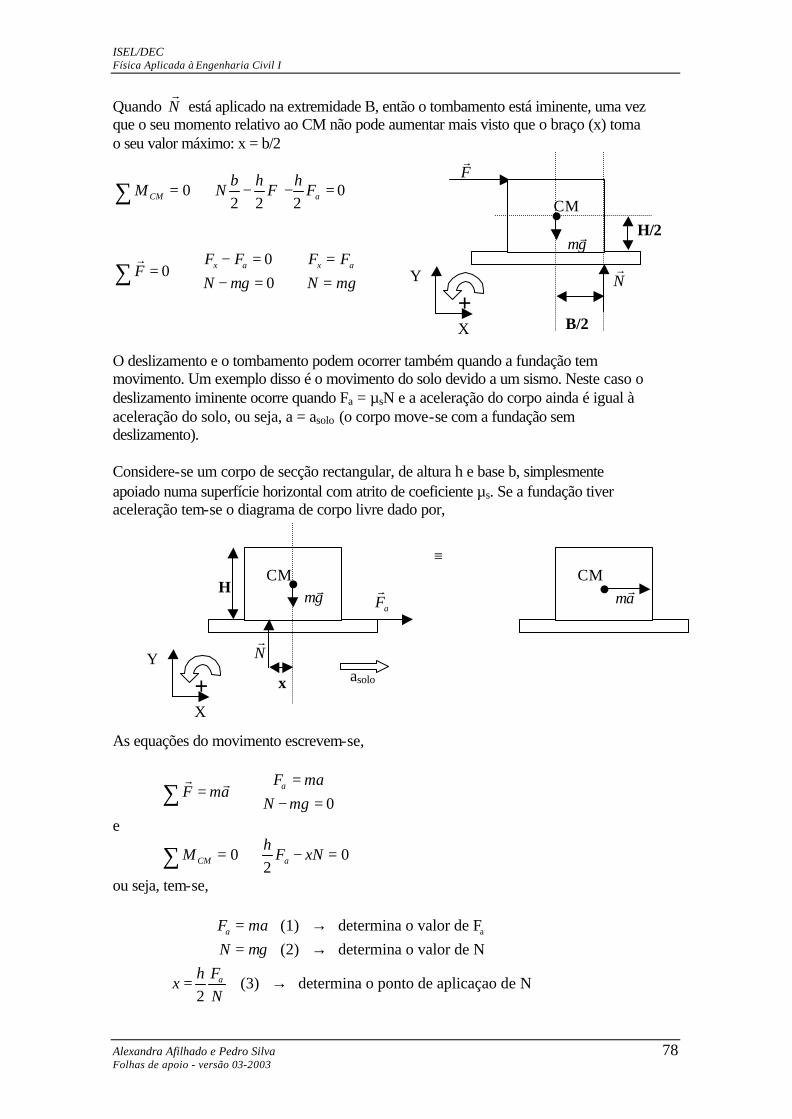
ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 78 Folhas de apoio - versão 03-2003
Quando Nr
está aplicado na extremidade B, então o tombamento está iminente, uma vez que o seu momento relativo ao CM não pode aumentar mais visto que o braço (x) toma o seu valor máximo: x = b/2
0 02 2 2
CM ab h hM N F F= ⇔ − − =∑
00
0x a x aF F F F
FN mg N mg
− = = = ⇔ ⇔ − = =
∑r
O deslizamento e o tombamento podem ocorrer também quando a fundação tem movimento. Um exemplo disso é o movimento do solo devido a um sismo. Neste caso o deslizamento iminente ocorre quando Fa = µsN e a aceleração do corpo ainda é igual à aceleração do solo, ou seja, a = asolo (o corpo move-se com a fundação sem deslizamento). Considere-se um corpo de secção rectangular, de altura h e base b, simplesmente apoiado numa superfície horizontal com atrito de coeficiente µs. Se a fundação tiver aceleração tem-se o diagrama de corpo livre dado por,
As equações do movimento escrevem-se,
0
aF maF ma
N mg=
= ⇔ − =∑
r r
e
0 02
CM ahM F xN= ⇔ − =∑
ou seja, tem-se,
a (1) determina o valor de F
(2) determina o valor de N
(3) determina o ponto de aplicaçao de N2
a
a
F maN mg
FhxN
= →
= → = →
Fr
Nr
mgr
CM
H/2
B/2
Y
X
+
marCM
x
aFr
Nr
mgr CM
H
Y
X
+ asolo
≡

ISEL/DEC Física Aplicada à Engenharia Civil I
Alexandra Afilhado e Pedro Silva 79 Folhas de apoio - versão 03-2003
Quando o deslizamento está iminente então Fa = µsN e de (2) vem Fa = µsmg e o valor de aceleração do solo que torna o deslizamento iminente é,
a ss
F mga gm m
µµ= = =
Para determinar o valor de a que torna o tombamento iminente, considere-se x = b/2 e da equação (3) resulta,
2 2
aFb h bhma bmg a gN h
= ⇔ = ⇔ =
Habitualmente designa-se por PGA (Peak Ground Aceleration) o valor mais elevado da aceleração do solo registada num determinado local, assim tem-se: Deslizamento iminente ⇒ PGA = µsg Tombamento iminente ⇒ PGA = (b/h)g Bibliografia
Beer & Johnston, Mecânica Vectorial para Engenheiros, McGraw Hill, 6ª ed. 1997.
Meriam & Kraige, Engineering Mechanics, Jonh Willey and Sons, 4th ed., 1998.
Halliday, Resnick & Walker, Fundamentos de Física, LTC, 4ª ed., 1996.