![C5.2 Elasticity and Plasticity [1cm] Lecture 2 Equations ...](https://static.fdocument.org/doc/165x107/622f8f3994946046a5727b7b/c52-elasticity-and-plasticity-1cm-lecture-2-equations-.jpg)
C5.2 Elasticity and Plasticity [1cm] Lecture 2 Equations ...

Introduction to non linear elasticity and solid
mechanics
Antonio Frisoli
June 1, 2016

1 Elements of tensor algebra
1.1 Vector space
Let’s define a vector space E the space of vectors v endowed with sum operationlinear with scalar values α, such that
α(v1 + v2) = αv2 + αv1 (1)
and endowed with a scalar product operation such that:{u · v = v · uu · u ≥ 0 u · u = 0 only if u = 0
(2)
1.1.1 Orthonomal basis
Let’s assume a basis on the vector space E defined by {ei} defined according tothe property that
ei · ej = δij (3)
where δij is the Kronecker’s delta, equal to 1 for i = j, and 0 otherwise, and ·is the scalar product define in the vector space E .
of course ir we have a vector u this can be represented over basis {ei} as
u = u1e1 + u2e2 + u3e3
or using the mute index convention simply as u = uiei
1.1.2 The dual space
Let’s define a vector space E∗ as the space of the linear operators acting onL(E ,<), and let’s denote with the notation v∗. We can define the action of thedual vectors v∗ on the E∗ by means of a bilinear function L(E∗×E ,<) =< u∗·v >such that
u∗(v) = u∗ · v
We can adopt a matrix representation of dual vectors as row vectors, in sucha way that their action on column vectors is simply expressed by the matrixproduct:
u∗ · v =[u1u2u3
] v1
v2
v3
We can define a dual basis {εi} based on the following definition
ei · εj = δji (4)
Based on this definition, it is clear that we can easily derive that dual vectorstransform in a different way that vectors eI for a change of coordinates. Let’s

consider a new transformation such that we have a new reference frame in {e′i}and such that the matrix A contains the coordinates of transformation
e′i = Aijej
So the following will hold for the dual space basis
e′i · ε′j = δji (5)
and so substituting in the following expression
e′i · εj = Aki ek · εj = Aki δjk = Aji (6)
and if we write the transformation εj = Bjkε′k then we find for the same ex-
pressione′i · εj = e′i ·B
jkε
′k = Bjk(e′i · ε′k) = Bjkδki = Bji (7)
so this means equivalently that
Bji = Aji
So this tell us that vector of the dual space transforms according to the inverserelation, since we easily derive that ε′j = (B−1)jkε
′k = (A−1)jkε′k
For this reason the following definition is adopted{contravariant vectors : ei transforms by: e′i = Aijej
covariant vector : εi transforms by: ε′i = Bijεj(8)
where Bj = (A−1)ij
Classical matrix notation: In classical matrix notation, where the all vec-tors of dual and non dual space are represented as column vector, this willinvolve a transpose. This can be easily checked by the following:
εi · ej = ε′i · e′j (9)
But if we assume that ε′i = Bεi and e′j = Aej We find
ε′i · e′j = Bεi ·Aej = εi ·BTAej (10)
that implies BT = A−1. Or equivalently
ε′i · e′j = ε′i
Te′j = εi
TBTAej (11)
This is the convention we will adopt for matrix notation.This explains how for a change of reference frame of orthonormal coordinates,
we use the same transformation law, since Q−1 = QT .

1.2 Exercise1 Let’s assume to have a basis transformation from {ei} to {e′i}. Let’s forinstance make the assumption of the following transformation:
e′1 =
530
e′2 =
10−7
e′2 =
111
(12)
It is easy to see that we can use the versors coordinates to build a transfor-mation matrix such that
A =(e′1 e′2 e′3
)=
5 1 13 0 10 −7 1
(13)
where of course the matrix A is such that vi = Ajiv′j .
It is interesting to determine the mapping of the dual basis {ε′i}. This canbe easily found by imposing the condition ε′i · ej = δij . A way to satisfy this
constraint is to choose the basis {ε′i} according to the following rule:
ε′i =e′j ∧ e′k
(e′j ∧ e′k) · e′i(14)
From this definition it is easy to see that ε′i ·e′i = 1, while ε′i ·e′j = 0, ε′i ·e′k = 0,We find so for the new transformation
ε′1 =
0.6364−0.72730.0909
ε′2 =
−0.27270.4545−0.1818
ε′3 =
−1.90913.1818−0.2727
(15)
and it can be verified that matrix B defined as:
B =(ε′1 ε′2 ε′3
)(16)
is such that BTA = I.
1.3 Tensor definition
We will define a tensor T as the scalar multilinear operator acting on the productof vector spaces L(E∗ × E∗ × . . .
r times×E × E × · · · × E
s times,R) and in this case if will be
defined as TSr with r contravariant components and s covariant components, i.e.tensor of type (r, s).
In particular the set of linear mappings from E to R, that is L(E ,R) arevectors of the dual space E∗ and are called co-variant vectors. Vectors in E aredefined as contravariant vectors, that is linear mapping acting as L(E∗,R) .
1Exercise 1 pag. 179 Guggenheim

Example of a tensor of second order Let’s consider the action of a matrixT whose components are T ij acting on (E × E). Given two vectors u = ujej
and vector v = viei, then
Tu · v = T ijujvi (17)
1.4 Definition of tensor product
Suppose to have two tensors of order 1, vectors u and v. Their action as firstorder tensor on vectors x and y of E are simply given by u(x) = uixi andv(y) = vjyj .
So we can define the tensor product as the second-order tensor
(u⊗ v)(x,y) = uivjyjxi
This is equivalent to define the matrix
A = uTv =
u1v1 u1v2 u1v3
u2v1 u2v2 u2v3
u3v1 u3v2 u3v3
(18)
and so:(u⊗ v)(x,y) = Ax · y
The same can be of course extended to higher order tensors.
1.5 Pull-back and push-forward operations between vec-tor space and its dual one
Let’s consider the same case of deformation for which we derive a transformationmatrix connecting two reference frames {ei} (spatial coordinates) and {Ei}(material coordinates), where x = χ(X) and dx = GradX dX. The matrix
A = GradX =∂x
∂X=[g1 g2 g3
](19)
where the vectors gi are the tangent vectors corresponding to the affine connec-tion going from {Ei} to {ei}. So we will assume that the coordinate vectors inspatial coordinates is such that {ei} = {gi}. This of course means that in thenew coordinates system the versors are neither normal nor reciprocally orthog-onal. So given a vector in the spatial frame v = viei, we will have the followingrelationship holding:
Vi = Aijvj
that means basicallyV = Av
.It is clear that under transformation v = BTV, where B = A−T we see that

tu · v = tBTU ·BTV = BTBTU ·V = A−TTA−1U ·V (20)
that is the formulation of transformation for a tensor of II order adopting stan-dard matrix notation t = A−TTA−1.
The mapping
t = A−TTA−1
is called the push-forward operation.Of course it is easy to derive the inverse pull-back operation, by pre-multiplying
the above expression by B−1B = I and post-multiplying by BTB−T :
B−1BtBT︸ ︷︷ ︸B−T = B−1BATTABTB−T = B−1TB−T = ATTA
Since this holds for all B matrix we find the definition for the push-forwardtransformation of tensor of II order, the following law:
T = AT tA
According to mute index notation we can write the transformation as
T ij = AikAjl tkl (21)
that says how are transformed contra-variant components. This will be usedlater on for derivation of main properties of transformation of tensors.
To generalize the above formula to higher order tensors we need of course toconsider a mute index notation and so we have.
Tensor transformation law Of course according to the vector transforma-tion identified so far by (8), if we assume that e′i = Bijej and so that ε′i = Aijε
j
the following transformation law will hold
T ′j1.j1,...,jsi1,i2,...,iru′i11 u′i22 . . . u′irr v′1,j1v
′2,j2 . . . v
′j,js =
T l1.l2,...,lsk1,k2,...,krAk1i1 A
k2i2Ak3i3 B
j1l1Bj2l2 B
j3l3ui11 u
i22 . . . uirr v1,j1v2,j2 . . . vj,js (22)
that finally tell us the general transformation law of a tensor (push-foward)as
T ′j1.j1,...,jsi1,i2,...,ir= T l1.l2,...,lsk1,k2,...,kr
Ak1i1 Ak2i2Ak3i3 B
j1l1Bj2l2 B
j3l3
(23)
and viceversa (pull-back)
T j1.j1,...,jsi1,i2,...,ir= T ′l1.l2,...,lsk1,k2,...,kr
Bk1i1 Bk2i2Bk3i3 A
j1l1Aj2l2A
j3l3
(24)
that in the previous case generalizes as:
T j1.j1,...,js = tl1.l2,...,lsAj1l1Aj2l2Aj3l3 (25)
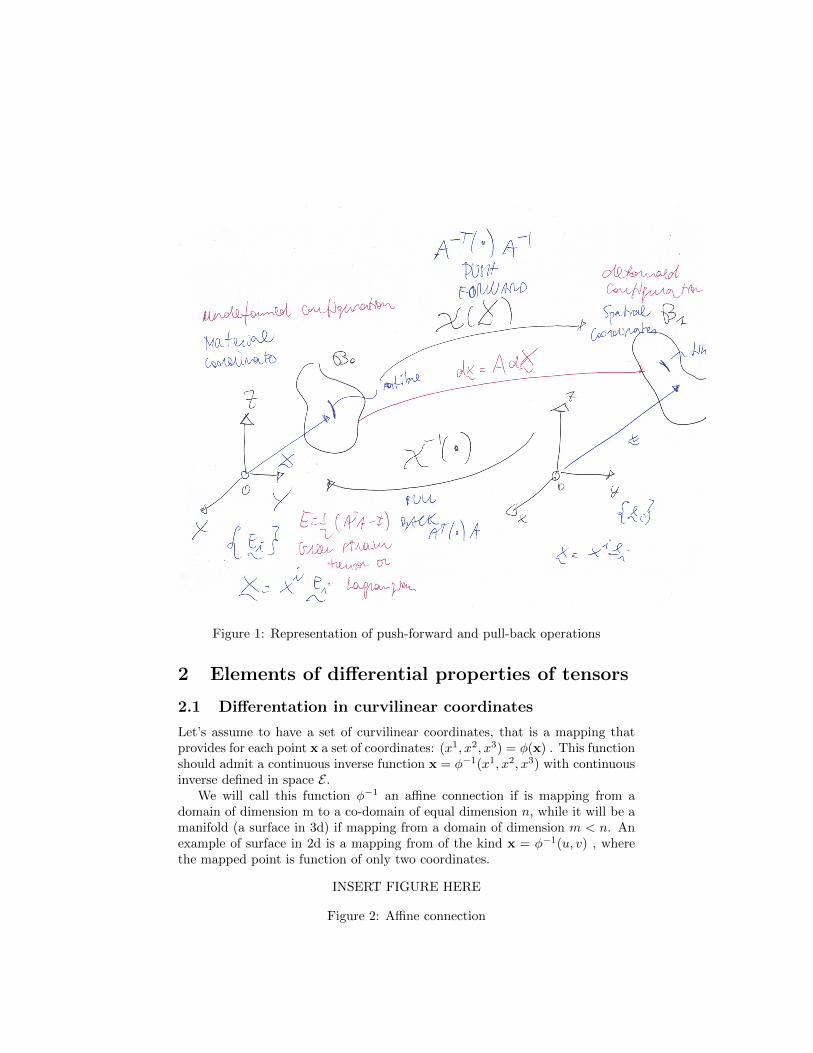
Figure 1: Representation of push-forward and pull-back operations
2 Elements of differential properties of tensors
2.1 Differentation in curvilinear coordinates
Let’s assume to have a set of curvilinear coordinates, that is a mapping thatprovides for each point x a set of coordinates: (x1, x2, x3) = φ(x) . This functionshould admit a continuous inverse function x = φ−1(x1, x2, x3) with continuousinverse defined in space E .
We will call this function φ−1 an affine connection if is mapping from adomain of dimension m to a co-domain of equal dimension n, while it will be amanifold (a surface in 3d) if mapping from a domain of dimension m < n. Anexample of surface in 2d is a mapping from of the kind x = φ−1(u, v) , wherethe mapped point is function of only two coordinates.
INSERT FIGURE HERE
Figure 2: Affine connection

Given this mapping, we can define easily define tangent vectors to the xi
coordinates by the following:
∂x
∂xi= gi(x) (26)
gi(x) is a linear operator over the tangent space at φ−1 at x, and we canexpress locally the differential as:
dx =∂x
∂xidxj = gj(x)dxj
and we can define the dual basis as gi(x) · gj(x) = δijNow let’s introduce the Christoffel symbols as the cooefficient such that:
∂gi
∂xj= Γkijgk (27)
2.1.1 Differential operators on tensors
Given an tensor T with its components expressed in terms of gi Ti1,i2,...,in , n asfollows:
GradT = ∇⊗T = {∂Ti1,i2,...,in∂xi
−n∑p=1
ΓjiipTi1,...,j,...,in}gi1 ⊗gi1 ⊗ . . .⊗gin ⊗gi
(28)In particolare per l’operazione di gradiente succede che l’ordine del tensore
viene aumentato di un fattore 1. L’espressione (34) va intesa in modo partico-lare, nel senso che l’indice j va a cadere tutte le volte nella posizione p−ma.
The divergence operation is on the opposite the contraction of one index,typically made by the scalr product.
3 Case of spherical coordinates
Let’s assume to have a diagonal tensor in spherical coordinates that over thebasis {ei} has components Trr, Tθ, Tφφ The sperical coordinates systems is asfollows: x = r cos(θ) cos(φ)
y = r sin(θ) sin(φ)z = r cos(θ)
(29)
The tangent vectors {gi} are given by:

gr =
∂x∂r∂y∂r∂z∂r
=
sin(θ) cos(φ)
sin θ sin(φ)
cos(θ)
gθ =
∂x∂θ∂y∂θ∂z∂θ
=
r cos(θ) cos(φ)
r cos(θ) sin(φ)
−rsin(θ)
gφ =
∂x∂φ∂y∂φ∂z∂φ
=
−r sin(θ) sin(φ)
r sin(θ) cosφ
0
(30)
Normalized versors ei,are obtained from tangent vectors gi, as folows:
er =
sin(θ) cos(φ)
sin(θ) sin(φ)
cos(θ)
eθ =
cos(θ) cos(φ)
cos(θ) sin(φ)
−sin(θ)
eφ =
− sin(φ)
cos(φ)
0
(31)
First approach We express Trr, Tθθ, Tφφ on the basis as follows Trr, r2Tθθ, r
2Tφφ.Then we recall that the Christoffel symbols for spherical coordinates (pag.
66 Ogden) are given by:
Γ212 = Γ3
13 = 1/r Γ122 = −r Γ3
23 = cotg(θ) (32)
Γ133 = r sin2(θ) Γ2
33 − sin(θ) cos(θ) (33)
So that in our case we have
GradT = ∇⊗ T = {∂Ti1,i2∂xi
− (Γji1,i1Tj,i2 + Γji1,i2Ti1,j)}gi1 ⊗ gi2 ⊗ gi3 (34)
Second approach Per ricavare l’espressione del gradiente in coordinate sferichesi noti, anche esaminando la Figura 10, che uno spostamento infinitesimo es-primibile attraverso la seguente relazione:
d~l = drER + r sin(θ)dφEΦ + rdθEΘ (35)
Si pu quindi ricavare l’espressione seguente per il gradiente in coordinatesferiche:

Grad = ER∂
∂R+ EΦ
1
R sin(θ)
∂
∂Φ+ EΘ
1
R
∂
∂Θ(36)
Grad x should consider that:
∂Er
∂r =
0
0
0
∂Er
∂φ =
− sin(θ) sin(φ)
sin(θ) cos(φ)
0
= sin(θ)Eφ
∂Er
∂θ =
− cos(θ) cos(φ)
sin(θ) cos(φ)
0
= Eθ
(37)
Consider to have a diagonal tensor in spherical coordinates, so a tensorexpressed by the following
T = TrrER ⊗ER + Tθ,θEθ,θ ⊗Eθ,θ + Tφ,φEφ,φ ⊗Eφ,φ (38)
Then the computation of the gradient is performed as follows, increasing theorder of the tensor from 2 to 3:
∇⊗ T = (ER∂
∂R+ EΦ
1
R sin(θ)
∂
∂Φ+ EΘ
1
R
∂
∂Θ)⊗
(TrrER ⊗ER + Tθ,θEθ,θ ⊗Eθ,θ + Tφ,φEφ,φ ⊗Eφ,φ) (39)
Let’s consider the first component in the hypothesis that Trr is a functiononly of R, so
(ER∂
∂R+ EΘ
1
R
∂
∂Θ+ EΦ
1
R sin(θ)
∂
∂Φ)⊗ (TrrER ⊗ER) =
∂Trr(R)
∂RER ⊗ER ⊗ER + TrrER ⊗
∂(ER ⊗ER)
∂R+
1
RTrrEΘ ⊗
∂(ER ⊗ER)
∂Θ+
1
R sin(θ)TrrEΦ ⊗
∂(ER ⊗ER)
∂Φ(40)
Then we perform the derivative of∂(ER⊗ER)
∂R = 0∂(ER⊗ER)
∂θ = ER ⊗Eθ + Eθ ⊗ER∂(ER⊗ER)
∂Φ = (ER ⊗EΦ + EΦ ⊗ER) sin(θ)
(41)

So we have the following:
∇⊗ (TrrER ⊗ER) =
∂Trr(R)
∂RER ⊗ER ⊗ER+
1
RTrrEΘ ⊗ (ER ⊗Eθ + Eθ ⊗ER)+
1
R)TrrEΦ ⊗ (ER ⊗EΦ + EΦ ⊗ER) (42)
This is the first gradient component. For the divergence, we perform the con-traction of the gradient operator, in this case between first and third index, byperforming a scalar product between first and third tensor, so we obtain
div(TrrER ⊗ER) =
∂Trr(R)
∂RER(ER ·ER)+
1
RTrrER[(EΘ ·EΘ) + EΘ(EΘ ·ER)]+
1
RTrr[ER(EΦ ·EΦ) + EΦ(EΦ ·ER)] =
(∂Trr(R)
∂R+
2
RTrr)ER (43)
so after the contraction we obtain for the divergence thatWith the same process we can find the other ones and obtain:
∇⊗ (TθθEθ ⊗Eθ) = (∇Tθθ)⊗Eθ ⊗Eθ+
1
RTθθEΘ ⊗
∂(Eθ ⊗Eθ)
∂Θ+
1
R sin(θ)TθθEΦ ⊗
∂(EΦ ⊗EΦ)
∂φ(44)
But then we can exploit the knowledge:{∂(Eθ⊗Eθ)
∂θ = −ER ⊗Eθ −Eθ ⊗ER∂(Eθ⊗Eθ)
∂Φ = cos(θ)(EΦ ⊗EΘ + EΘ ⊗EΦ)(45)
So applying the contraction operator to the gradient, we obtain for thedivergence second term (consider that for the term (∇Tθθ)⊗Eθ ⊗Eθ after thecontraction the only term is the one along Eθ :
div(TθθEθ ⊗Eθ) =1
R
∂Tθθ∂θ
Eθ −1
RTθθER + cot(θ)
1
RTθθEθ
(46)

Proceeding in an analogue way for the third component we have that
∇⊗(TφφEφ⊗Eφ) = − 1
RTφφER−cot(θ)
1
RTφφEΘ+cot(θ)
1
RTφφEΦ+
1
R sin(θ)
∂Tφ,φ∂φ
EΦ
(47)
where we have used the notion that
∂Eφ
∂φ= − ER
cos(θ)− Eφ
sin(θ)(48)
∂Eφ
∂θ= − sin(θ)ER (49)
So collecting the 3 terms it is easy to find the divergence expression for thetensor T in diagonal form:
div(T ) =
∂Trr∂R
+2
RTrr −
1
R(Tφφ + Tθθ)
1
R
∂Tθθ∂θ
+ cot(θ)1
R()Tθθ − Tφφ)
cot(θ)1
RTφφ +
1
R sin(θ)
∂Tφ,φ∂φ
(50)
3.1 Cylindrical coordinates
Per le coordinate cilindriche abbiamo ad esempio che:
Γ212 = Γ12
2 =1
rΓ22
1 = −r (51)
Per poter procedere con il calcolo nelle relative coordinate cilindriche, va pertenuto conto della relazione esistente fra i versori normalizzati e non:
g1 = er
g2 = reθ
g3 = ez
(52)
g1 = er
g2 = er/r
g3 = ez
(53)
Supponiamo allora di avere un vettore v avente l’espressione corrispondentein coordinate cilindriche data da:
v1 = vr
v2 = rvθ
v3 = vz
(54)
Per cui abbiamo che tenendo conto dei coefficienti non nulli:
∇⊗ v =∂v1
∂rg1 ⊗ g1 +
∂v1
∂θg1 ⊗ g2 +
∂v1
∂zg1 ⊗ g3+
∂v2
∂rg2 ⊗ g1 +
∂v2
∂θg2 ⊗ g2 +
∂v2
∂zg2 ⊗ g3 + . . .
. . .− Γ212 v2g
2 ⊗ g1 − Γ122 v2g
1 ⊗ g2 − Γ221 v1g
2 ⊗ g2 (55)

Con le sostituzioni dei vi e dei gi allora otteniamo
∇⊗ v =∂vr∂r
er ⊗ er +1
r
∂vr∂θ
er ⊗ eθ +∂vr∂z
er ⊗ ez+
∂rvθ∂r
1
reθ ⊗ er +
∂rvθ∂θ
1
reθ ⊗
1
reθ +
∂rvθ∂z
1
reθ ⊗ ez + . . .
. . .− 1
rrvθeθ
1
r⊗ er −
1
rrvθer ⊗
1
reθ + rvreθ
1
r⊗ eθ
1
r(56)
Per cui si trova in generale:
∇⊗ v =∂vr∂r
er ⊗ er + (1
r
∂vr∂θ− 1
rvθ)er ⊗ eθ +
∂vr∂z
er ⊗ ez+
(∂rvθ∂r
1
r− 1
rvθ)eθ ⊗ er + (
∂vθ∂θ
1
r+
1
rvr)eθ ⊗ eθ +
∂vθ∂z
eθ ⊗ ez + . . .
∂vr∂r
er ⊗ er +1
r(∂vr∂θ− vθ)er ⊗ eθ +
∂vr∂z
er ⊗ ez+
∂vθ∂r
eθ ⊗ er +1
r(∂vθ∂θ
+ vr)eθ ⊗ eθ +∂vθ∂z
eθ ⊗ ez+
∂vz∂r
ez ⊗ er +1
r
∂vz∂θ
ez ⊗ eθ +∂vz∂z
ez ⊗ ez+ (57)
Dove l’espressione stata completata per i termini rimanenti in zeta, per i qualisemplice ricavare la formula corrispondente.
3.1.1 Tensori del II ordine
Per i tensori del II ordine si procede in maniera analoga, dove in questo caso laformula (34) si specializza nella:
Tpq,i = (∂Tpq∂xi
− ΓripTrq − ΓriqTpr)gp ⊗ gq ⊗ gi (58)
Al solito si assume che se indichiamo con gi i vettori normalizzati e le componentiequivalenti Tij per cui succede che
Tijgi ⊗ gj = Tij gi ⊗ gj (59)
In questo caso allora applicando le stesse regole troviamo ad esempio che Trr =T11, T12 = rTrθ, T22 = r2Tθθ
4 Comportamento meccanico dei materiali or-ganici
La presenza di grandi deformazioni nella fenomenologia dei tessuti organici rendela teoria classica dell’elasticit inadeguata a trattare questo genere di materiali.E dunque necessario un nuovo tipo di strumento matematico, per certi versipi potente, che permetta di tenere conto di questi aspetti in genere di scarsointeresse nelle applicazioni strutturali comuni. A questo scopo si utilizza lameccanica dei solidi non lineare generalmente impiegata nello studio dei mate-riali polimerici, in seguito si vedr come tutti i modelli scelti per caratterizzarei tessuti organici siano mutuati da studi concernenti polimeri ed in particolareelastomeri che con i materiali biologici condividono molte caratteristiche.
Diversi testi sono stati adottati come riferimento per la notazione adottatanel seguente testo. Per quanto possibile si cercato di fare riferimento allenotazioni maggiormente adottate.
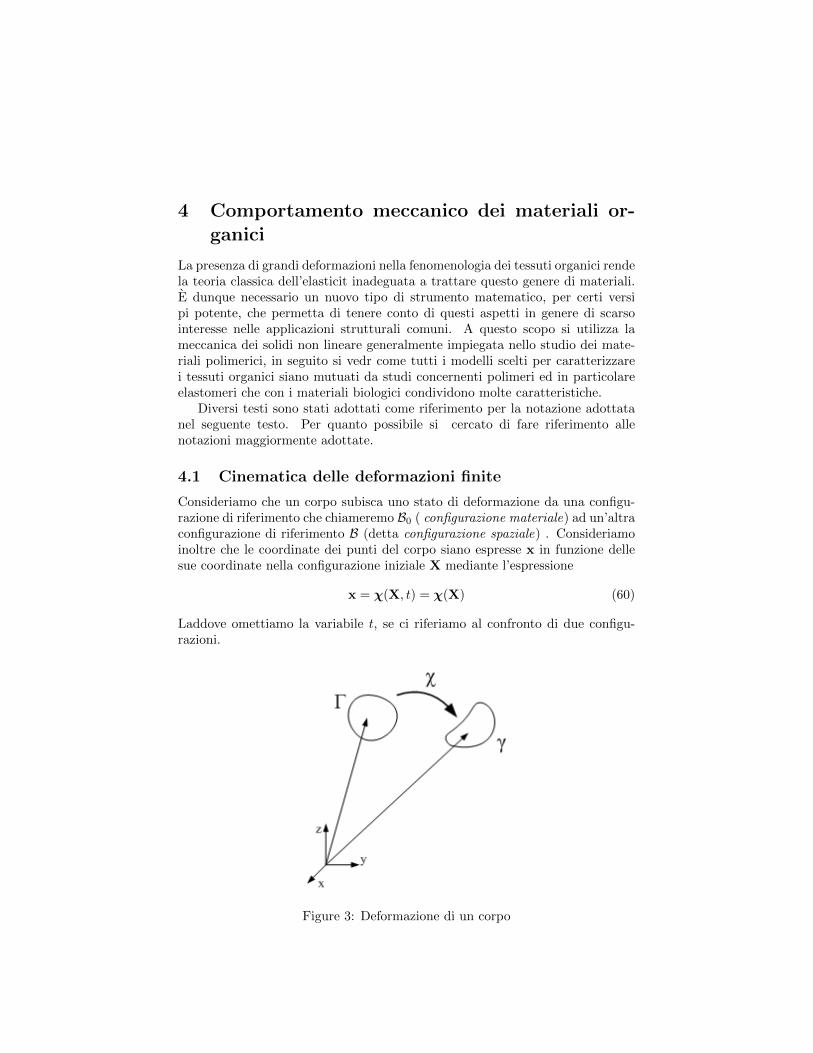
4.1 Cinematica delle deformazioni finite
Consideriamo che un corpo subisca uno stato di deformazione da una configu-razione di riferimento che chiameremo B0 ( configurazione materiale) ad un’altraconfigurazione di riferimento B (detta configurazione spaziale) . Consideriamoinoltre che le coordinate dei punti del corpo siano espresse x in funzione dellesue coordinate nella configurazione iniziale X mediante l’espressione
x = χ(X, t) = χ(X) (60)
Laddove omettiamo la variabile t, se ci riferiamo al confronto di due configu-razioni.
Figure 3: Deformazione di un corpo

Considerando il differenziale della (60) rispetto a X, otteniamo la seguenteespressione:
dx = AdX (61)
dove A e un tensore del secondo ordine:
A = Gradχ(X) = ∇⊗ χ(X) (62)
L’indicazione Grad si riferisce ad un gradiente rispetto a X, mentre grad ad x.Indichiamo poi con la lettera J = det(A).Una prima osservazione deriva dal calcolo della norma di ‖dx‖. Abbiamo
infatti chedx · dx = dX · (ATA)dX (63)
Si definiscono inoltre i seguenti tensori2:
{EG = ATA, Tensore di deformazione di Cauchy-Green destro o Cauchy-Green measure ;AAT , Tensore di deformazione di Cauchy-Green sinistro o Almansi measure
(64)Il tensore di Cauchy-Green si riferisce al sistema di riferimento fisso T0, mentreil tensore di Almansi a quello solidale al corpo nella configurazione deformataTt.
Il Finger strain tensor, di seguito indicato con EF , si definisce invece comel’inverso del tensore EG, tale che EGEF = 1
Con la matrice B si indica invece l’inversa di AT tale che B = (A−1)T edABT = I.
Chiaramente i volumi si trasformano con la legge dv = det(A)dV , per cuiquando J = 1 significa che il volume non varia.
Se consideriamo la variazione di lunghezza di una fibra arbitraria apparte-nente al corpo B troviamo la seguente relazione:
‖dx‖2 − ‖dX‖2 = dX · (ATA− I)dX (65)
Il tensore di Green ( o lagrangiano) si definisce come (vedasi Ogden, 1997,pag. 90):
E =1
2(ATA− I) =
1
2(EG − I) (66)
Il tensore (ATA − I) viene chiamato di solito Green strain tensor Ogden(1997) o semplicemente tensione di deformazione finita finite strain tensor G.V. Vino-gradov (1977) perche rende conto dello stato di deformazione di un corpo. Iltermine lagrangiano in questo caso indica che la deformazione viene misuratain un sistema di coordinate prima della deformazione.
E facile verificare che le componenti di E ed EG sono legate dalla seguenterelazione:
γGij = 2γij + δij EG = 2E + I (67)
2Per la denominazione si vedano (G.V. Vinogradov, 1977, pag.25) (Lurie, 1990, pag.7)

Le componenti del tensore di Green E verranno nel seguito indicate con lanotazione γij , in accordo con la notazione adottata in (G.V. Vinogradov, 1977,pag.15) e comunemente utilizzata nel campo dell’analisi dei materiali metalliciper piccole deformazioni.
Se la (65) viene esplicitata, tenendo conto della simmetria del tensore dideformazione E, si ottiene:
‖dx‖2−‖dX‖2 = 2(εxxdX2+εyydY
2+εzzdZ2+εxydXdY +εxzdXdZ+εyzdY dZ)
(68)Pertanto si definiscono anche le componenti εij :{
γij = εij , per i = j;γij = 1
2εij , per i 6= j(69)
Dalla (65) possiamo anche ricavare la seguente:
‖dx‖2 − ‖dX‖2 = dx · 1
2(I −BBT )dx (70)
Il tensore 12 (I − BBT ) viene chiamato invece tensore di deformazione eu-
leriano, perch fa riferimento ad una terna solidale con il corpo di riferimento,ovvero tensore di deformazione di Almansi.
Lo spostamento di una generica particella puo essere descritto come:
u(X) = χ(X)−X (71)
cos che il generico elemento Aij del tensore A pu esprimersi come:
Aij =∂xi∂Xj
= δij +∂ui∂Xj
(72)
Il gradiente tensore di spostamento D viene definito come:
D = Gradu(X) = A− I (73)
Ne segue la relazione importante che lega il tensore di deformazione di GreenE con quello di spostamento D
E =1
2(D +DT +DTD) (74)
La (74) e una relazione molto utile, in quanto ci consente di calcolare le com-ponenti del tensore di deformazione di Green E come:
γij =1
2(∂ui∂Xj
+∂uj∂Xi
+∂uk∂Xi
∂uk∂Xj
) (75)
In generale invece del tensore delle grandi deformazioni, se ne adotta nellateoria lineare il tensore delle piccole deformazioni E0, dove vengono trascuratii termini del secondo ordine:
γ0ij =
1
2(∂ui∂Xj
+∂uj∂Xi
) (76)

Tipicamente la sua indicazione nei libri di testo, nell’analisi dei materiali metal-lici, viene data con la seguente notazione:
γ0xx =
∂u
∂xγ0yy =
∂v
∂yγ0zz =
∂w
∂z(77)
γ0xy =
1
2(∂u
∂y+∂v
∂x) γ0
yz =1
2(∂y
∂z+∂z
∂y) γ0
xz =1
2(∂u
∂z+∂w
∂x) (78)
(79)
4.2 Invarianti tensoriali
Il gradiente di deformazione indicato con A pu essere decomposto 3 nel prodottodi un tensore del secondo ordine simmetrico definito positivo U o V ed un tensoreortogonale del secondo ordine R:
A = RU = V R (80)
Fisicamente questo significa che una generica deformazione di un corpo rigidopu essere interpretata come la successione di un moto rigido + una deformazionepura.
Il tensore A ammette tre quantit indipendenti dal sistema di riferimentodetti invarianti tensoriali e definiti da:
i1 = tr(A) = Fii con i = 1, 2, 3 (81)
i2 =1
2(AiiAjj −AijAij) con i, j = 1, 2, 3 (82)
i3 = det(A) = J (83)
Il terzo invariante, generalmente indicato con la lettera J detto rapporto volu-metrico (o anche determinante Jacobiano) perch indicando con dv e dV i volumielementari, rispettivamente nella configurazione deformata ed indeformata, si hache:
dv = JdV (84)
Invece per le superfici elementari ds = nds e ds = NdS (tenendo conto chei vettori n e N sono le normali alle superfici e che queste sono riferite alleconfigurazioni γ e Γ come sopra) invece vale la relazione:
ds = JA−T dS (85)
C = ATA (86)
detto tensore destro di Cauchy-Green ed esprime la lunghezza di un vettoredeformato in termini della configurazione iniziale Γ. Si ottiene:
C = ATA = (RU)T (RU) = UTU (87)
3(Ogden, 1997, pag. 94)

che mostra come C non dipenda dai moti rigidi del corpo ma solo dalle defor-mazioni. Il tensore C simmetrico e definito positivo.
u · Cu > 0 per ogni u 6= 0 (88)
In generale il tensore di Cauchy-Green EG ammette tre invarianti, costituitidagli autovalori che possono essere trovati dalla sua decomposizione spettrale(Ogden, 1997, pag. 94):
C = ATA =
3∑i=1
λ2iui ⊗ ui (89)
dove ⊗ indica il prodotto tensoriale 4 e con ui si sono indicati gli autovettoriassociati agli autovalori λi, che sono gli allungamenti principali durante la de-formazione. E possibile dimostrare che gli autovalori λi sono anche autovaloridi U e V .
Agli autovalori λi possibile associare gli invarianti dati da:
I1 = λ21 + λ2
2 + λ23 = tr(C) (90)
I2 = λ21λ
22 + λ2
1λ23 + λ2
2λ23 =
1
2tr(C)2 − tr(CTC) (91)
I3 = λ21λ
21λ
23 = det(C) = J2 (92)
E inoltre definito il tensore b detto tensore sinistro di Cauchy-Green (o, avolte, Finger strain tensor) che invece esprime la lunghezza del vettore defor-mato in termini della configurazione spaziale γ; b definito dalla:
b = FFT (93)
come per il tensore destro anche b simmetrico e definito positivo, e come per Cpossibile definire un tensore delle deformazioni e in funzione delle coordinate xdetto tensore delle deformazioni di Eulero-Almansi definito come:
e =1
2(I− b−1) =
1
2(I− F−TF−1) (94)
Chiaramente nella configurazione indeformata, abbiamo che gli allungamentiprincipali λi hanno valore unitario, e pertanto: I1 = 3
I2 = 3I3 = 1
(95)
Analogamente si pu procedere per determinare gli invarianti associati altensore di deformazione di Cauchy-Green E:
E1 = γxx + γyy + γzz
E2 = γxxγyy + γyyγzz + γxxγzz − (γ2xy + γ2
yz + γ2xz)
E3 = γxxγyyγzz − (γ2xxγyz + γ2
yyγxz + γ2zzγxy − γxyγxzγyz)
4si veda ad esempio la definizione data in (Ogden, 1997, pag.15)

E interessante notare come il primo invariante E1 rappresenti la variazionedi volume quando la deformazione avviene con piccoli deformazioni. Infatti datoun cubo di lato unitario, per piccoli deformazioni si pu assumere che si trasformiin cubo con lato di dimensione 1 + εi lungo le direzioni principali. Pertanto lavariazione di volume si pu stimare come ∆V = (1 + ε1)(1 + ε2)(1 + ε3) − 1.Per piccole deformazioni si trascurano gli spostamenti di potenza superiore alprimo per cui si ottiene ∆V ' ε1 + ε2 + ε3 = E1. Per cui per un materialeincomprimibile abbiamo che si pu assumere E1 = 0.
Tra gli invarianti Ii ed Ei sussistono le seguenti relazioni (Ciarlet, 1988, pag.17): E1 = 1
2 (I1 − 3)E2 = 1
4 (I2 − 2I1 + 3)E3 = 1
8 (I3 − I2 + I1 − 1)(96)
Le relazioni inverse sono: EG1 = I1 = 2E1 + 3EG2 = I2 = 4E2 + 4E1 + 3EG3 = I3 = 8E3 + 4E2 + 2E1 + 1
(97)
Si vede come per materiali incompressibili I3 = 1. Infatti I3 = det(A)2 rap-presenta il fattore di variazione del volume durante la trasformazione associataalla deformazione. Questa interpretazione di I3 = 1 esatta e vale quindi ancheper grandi deformazioni.
5 Tensioni in corpi con deformazioni finite
Nella teoria classica dell’elasticit, lo stato di tensione all’interno di un corpodefinito da un campo tensoriale simmetrico σ detto tensore degli sforzi diCauchy nel quale le forze, riferite alla configurazione deformata, vengono mis-urate per unit di superficie sempre nelle configurazione deformata. Solitamenteper la superficie deformata non conosciuta e risulta pratico quindi riferirsiall’unit di superficie indeformata ottenendo una misura detta tensione ingeg-neristica. L’utilizzo di questa seconda misura nelle comuni applicazioni di cal-colo strutturale non comporta generalmente errori molto grandi essendo le de-formazioni piccole e le aree deformata ed indeformata pressoch indistinguibili.Nelle prove di rottura per, in cui il fenomeno della riduzione trasversale dellasezione diventa importante, la tensione di rottura vera, essendo riferita ad unasuperficie minore, risulta pi grande in maniera non trascurabile della corrispon-dente tensione ingegneristica. Nell’ambito delle grandi deformazioni quindiintrodotto il campo di tensioni P chiamato primo tensore degli sforzi di Piola-Kirchhoff equivalente alle tensioni ingegneristiche.Per il teorema delle tensioni di Cauchy, la forza per unit di superficie t agentesu di un punto del corpo una funzione lineare della normale n uscente dal corponel punto stesso, i coefficienti di tale funzione sono gli elementi σij del tensoredegli sforzi σ:
t(x,n) = σ(x)n (98)

Il vettore t detto vettore delle tensioni vere. Un’analoga formulazione pu esserescritta utilizzando il primo tensore degli sforzi di Piola-Kirchhoff:
T(X,N) = P(X)N (99)
Il vettore T detto vettore delle tensioni nominali e non rappresenta la realeintensit delle tensioni, esso, infatti, ha la stessa direzione del vettore t agiscesulla configurazione deformata γ anche se funzione dei termini X e N chefanno riferimento alla funzione indeformata. Perch questa nuova definizione delteorema di Cauchy abbia senso fisico necessario che i tensori degli sforzi P e σabbiano in un punto risultante uguale:
tds = TdS (100)
Sostituendo la (98) e la (99) si ottiene:
σnds = PNdS (101)
La (85) che lega le superfici elementari deformate permette allora di scrivere:
P = JσF−T (102)
σ = J−1PFT = σT (103)
L’utilizzo del tensore P comporta per alcune difficolt:
1. P non energeticamente consistente, l’energia di deformazione ottenutamoltiplicando P per il tensore di deformazione E diverso da quella ot-tenuta utilizzando σ e il tensore delle piccole deformazioni.
2. P in generale non simmetrico, questo rende difficile il suo utilizzo inmetodi numerici come quello ad elementi finiti.
Un metodo di definizione delle tensioni pi appropriato allora ottenuto ripor-tando il vettore T e il tensore P in termini della configurazione indeformata. Iltensore S cos ottenuto detto secondo tensore di Piola-Kirchhoff.
Questo viene effettuato mediante l’operazione di pull-back nello spazio dualedelle tensioni. Le relazioni che legano quest’ultimo tensore con i precedenti sono:
S = JF−1σF−T = F−1P (104)
Bench S sia simmetrico ed energeticamente consistente non possibile dargli unsignificato fisico.
5.0.1 Risultati
Bisogna considerare che i dati di stress in Ansys vengono rappresentati at-traverso il tensore di stress S, definito come il secondo tensore di stress Piola-Kirchoff.

I tensori di stress introdotti ora sono il tensore di Cauchy T (che rappresentail true traction vector nella geometria deformata) ed il tensore di Piola-KirchoffST (primo tensore di Piola) che il traction vector nominale per cui si ha che
df = Tds = ST dS
. Pertanto equivalentemente si definiscono i tensori di stress di Cauchy (true) σo T e di Piola P o ST (nominale) 5. Con la notazione di Ogden avremmo che(che useremo prevalentemente):{
t = σt Cauchy true stress
T = PN First Pioloa-Kirchoff stress tensor(105)
Mentre la notazione di Holzapfel ci porta a dire{t = T t Cauchy true stress
T = STN First Piola-Kirchoff stress tensor(106)
dove si assunto che S = JBTT .
5definizione da pag. 111 del Holzapfel o pag.153 di Ogden
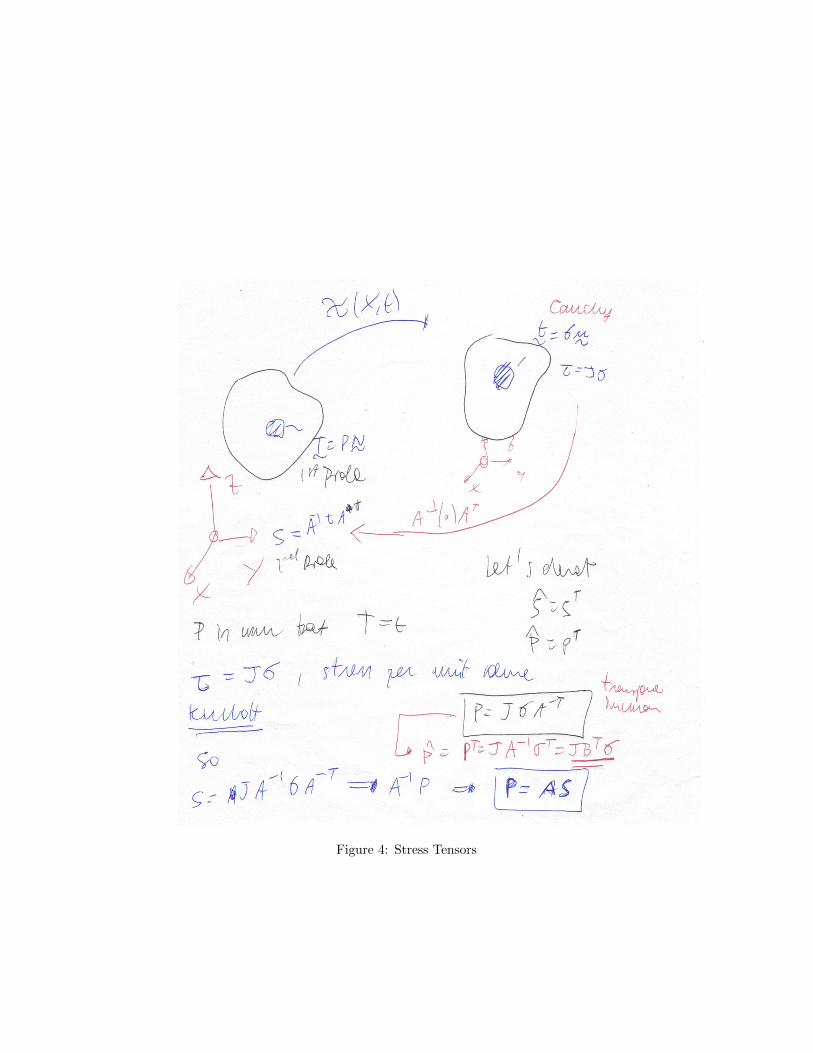
Figure 4: Stress Tensors
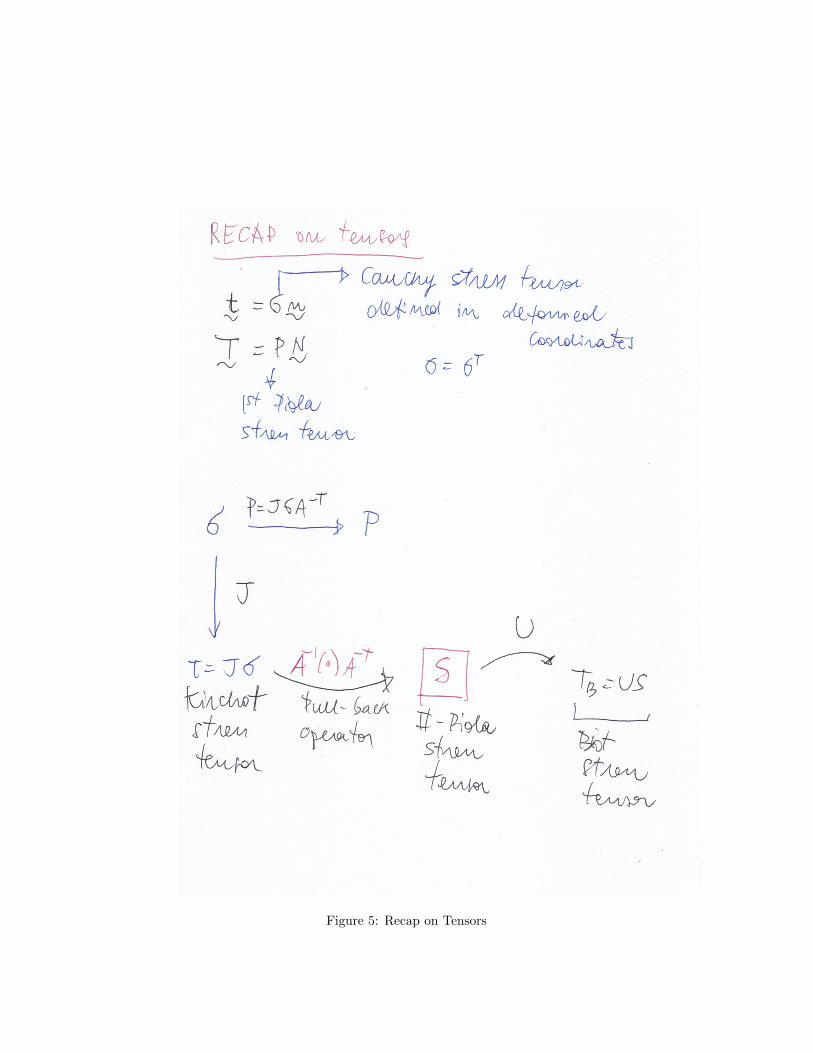
Figure 5: Recap on Tensors

5.0.2 Conjuigate tensors
Ora la cosa importante in termini di tensori coniugati, che il lavoro pu es-sere descritto dal true tensor di Cauchy come tr(SA). I tensori coniugati sonoelencati di seguito
Figure 6: Coniugacy tensor scheme

Inoltre si definisce anche il tensore di stress di Krichoff in relazione al tensoredi Cauchy come Jτ = σ (tensore di Cauchy pesato), differendo quindi solo peril volume. Per i materiali isotropi non vi sono quindi differenze (in altri testiviene indicato come τ). Il secondo tensore di Piola-Krichoff S∗ (utilizzato inansys) il pullback di T , ovvero si ha che T = FS∗F t.
Il tensore di Biot t(1) invece il tensore coniugato del right strect tensor U ,tale per cui il lavoro compiuto dato da tr(t(1)U)
Seguono le seguenti definizioni in termini di elasticit di Green, detta W alfunzione di energia elastica, gli stress principali di Cauchy sono legati dallaseguente formula:
Ti = J−1λi∂W
∂λi(107)
mentre gli stress di Kirchoff sono dati da:
Ti = λi∂W
∂λi(108)
Per un materiale incomprimibile, quindi J = det(A) = λ1λ2λ3 = 1, chiaramntele due definizioni coincidono. Per il tensore di Biot t(1) abbiamo ancora pisemplicemente
t(1)i =
∂W
∂λi(109)
Ora definitio il Lagrangian striain tensor E = 12 (AtA−I), il secondo tensore
di Piola il suo coniugato, ovvero tr(S∗E) rappresenta il lavoro compiuto, per cuiviene definito S∗ = ∂W
∂E . Nel nostro caso, ovvero di materiale incomprimibile,equivalente allo stress nominale nella configurazione indeformata.

6 Examples of deformation
6.1 Simple shear
Let us assume the following finite shear transformation from material coordi-nates {Ei} to spatial coordinates {ei}
x = X + αY
y = Y
z = Z
(110)
where α = 1/k where kk is the angular coefficient of the line. So it is easyto compute the deformation gradiente A. We will proceed by computing thetangent vectors considering the transformation x = χ(X). The tangent vectorsare given by the following:
g1 =∂x
∂X=
[∂x∂X∂y∂X
]=
[10
](111)
while
g2 =∂x
∂Y=
[∂x∂Y∂y∂Y
]=
[α1
](112)
So we have for the deformation strain matrix the expression
A =(g1 g2
)=
(1 α0 1
)(113)
We can compute the Green strain deformation tensor (Lagrangian tensor)as follows:
E =1
2(AtA− I) =
0 α 0α α2 00 0 0
(114)
and we can also apply the push-forward transformation to obtain the straintensor in material coordinates (eulerian tensor)
e = A−TEA−1 =
0 α 0α −α2 00 0 0
(115)
6.2 Compression and shear
Let’s now assume a non-linear transformation of type{x = X − 1
X
y = X2 + α+ Y ;(116)
Again we find in this case:

g1 =∂x
∂X=
[∂x∂X∂y∂X
]=
[1X2 + 1
2X
](117)
g2 =∂x
∂Y=
[∂x∂Y∂y∂Y
]=
[01
](118)
So we have for the deformation strain matrix the expression
A =(g1 g2
)=
(1X2 + 1 0
2X 1
)(119)
an compute the Green strain deformation tensor (Lagrangian tensor) as fol-lows:
E =1
2(AtA− I) =
(2X2 + 4X2 + 1
X4 2X2X 0
)(120)
and we can also apply the push-forward transformation to obtain the straintensor in material coordinates (eulerian tensor)
e = A−TEA−1 =
(−4X6+2X2+1
(X2+1)22X3
X2+12X3
X2+1 0
)(121)

6.3 Green Elasticity
Nella formulazione dell’elasticit secondo Green (vedasi Ogden, 1997, pag. 207)si assume che esiste una funzione di energia di deformazione W , la quale carat-terizza le propriet meccaniche del materiale. Se A denota il gradiente di defor-mazione (see (61)), si suppone che lo stato di tensione nel materiale S possaessere descritto mediante:
S =∂W
∂A(A) (122)
laddove sia con S sia con A indichiamo dei tensori. La funzione di energia,data un’arbitraria trasformazione ortogonale Q, deve soddisfare una relazionedi obiettivita della deformazione:
W (A) = W (QA) (123)
L’interpretazione fisica di questa equazione che l’energia di deformazione im-magazzinata all’interno del materiale non dipende da un moto rigido eventual-mente sovraimposto alla deformazione stessa, rendendo quindi la sua descrizionematematica indipendente dal sistema di riferimento adottato per la sua de-scrizione.
Una possibile formulazione della funzione di energia data da uno sviluppoin serie della funzione espressa in funzione degli invarianti:
W (I1, I2, I3) = cppqr(I1 − 3)(I2 − 3)q(I3 − 1)r (124)
6.4 Materiale elastico lineare per piccole deformazioni
Per un materiale elastico per piccole deformazioni possiamo assumere che l’energiadi deformazione dipenda solo da potenze degli invarianti associati a terminiquadratici (Novozhilov, 1910, pag. 119). Infatti se supponiamo che nello statoindeformato, le tensioni all’interno del corpo siano nulle non possiamo con-siderare termini del primo ordine, n termini costanti se assumiamo che nellaconfigurazione indeformata l’energia W assuma valore nullo. Se ad esempioconsideriamo una formulazione in termini degli invarianti di E,
W (E1, E2, E3) = c200E21 + c010E2 (125)
Infatti otteniamo che
σii =∂W
∂E1
∂E1
∂γii+∂W
∂E2
∂E2
∂γii= 2c200γii + c010(E1 − γii) = (2c200 + c010)γii + c010E1
(126)
σij =∂W
∂E1
∂E1
∂γij+∂W
∂E2
∂E2
∂γij= −2c010γij (127)
Questa proprio la classica formulazione per un materiale elastico lineare.Analogamente si pu vedere come per avere una configurazione alternativa
per non avere tensioni iniziali nella configurazione iniziale quella di imporrec100 + 2c010 + c001 = 0.

7 Material incomprimibili
Per un materiale incomprimibile abbiamo che I3 = 1. Pertanto nella formu-lazione dell’energia (124), vediamo che la dipendenza dal terzo invariante elim-inata, e la funzione pu dipendere soltanto dai primi due invarianti. La formu-lazione pi semplice data dalla combinazione lineare dei due invarianti I1 ed I2 efu proposta per la prima volta indipendentemente da Mooney e Rivlin, ed perquesta denominata funzione MR.
I due modelli presentati di seguito, molto studiati ed adatti per la descrizionedel comportamento di materiali polimerici, sono basati quindi sull’assunzione diincomiprimibilit del materiale.
7.1 Materiale di Mooney-Rivlin
Per un materiale di Mooney-Rivlin assumiamo invece il seguente modello
W (I1, I2, I3) = c100(I1 − 3) + c010(I2 − 3) (128)
E facile allora osservare dalla (97), che sussistono le seguenti relazioni:
I1 − 3 = 2E1 (129)
I2 − 3 = 4(E1 + E2) (130)
per cui l’espressione dell’energia (128) pu essere riformulata anche in terminidegli invarianti Ei come:
W (E1, E2) = 2c100E1 + 4c010(E1 + E2) = AE1 +BE2 (131)
con A = 4c010 + 2c100 e B = 4c010.
7.2 Materiale neo-hookean
Per un materiale neo-hookean abbiamo invece:
W (I1, I2, I3) = c100(I1 − 3) + c010(I2 − 3) (132)

8 Esercitazioni
8.1 Tensore di deformazione in compressione e torsione diun cilindro elastico
Si consideri il caso di un cilindro di materiale elastico che venga sottoposto aduna deformazione contemporanea di torsione e di compressione, tale per cui siabbia: r = λ−1/2R
θ = Θ + τλZz = λZ
(133)
Si intende che le coordinate r = (r, θ, z) fanno riferimento allo stato dopola deformazione, mentre le coordinate R = (R,Θ, Z) fanno riferimento allostato a trasformazione avvenuta. E conveniente svolgere l’analisi in coordinatecilindriche in modo da semplificare lo svolgimento dei calcoli. Il problema puessere studiato guardando la trasformazione che subisce un punto situato indirezione radiale, che in funzione dei versori nel sistema di riferimento espressoprima X e dopo x la deformazione come :{
x = λ−1/2Rer + λzez
X = RER + ZEZ(134)
Per calcolare la matrice A, si utilizza l’operatore tensorial di Grad, che incoordinate cilindriche dato da:
Grad = ER∂
∂R+ EΘ
1
R
∂
∂Θ+ EZ
∂
∂Z(135)
Dato il sistema di coordinate rappresentato in figura:Le coordinate cilindriche nel sistema di riferimento x = r cos(θ)
y = r sin(θ)z = z
(136)
I vettori di riferimento non normalizzati sono quindi dati da:
gr = ∂x∂r =
cos(θ)
sin θ
0
gθ = ∂x
∂θ =
−r sin(θ)
r cos θ
0
gz = ∂x
∂z =
0
0
1
(137)
gr = er
gθ = reθ
gz = ez
(138)
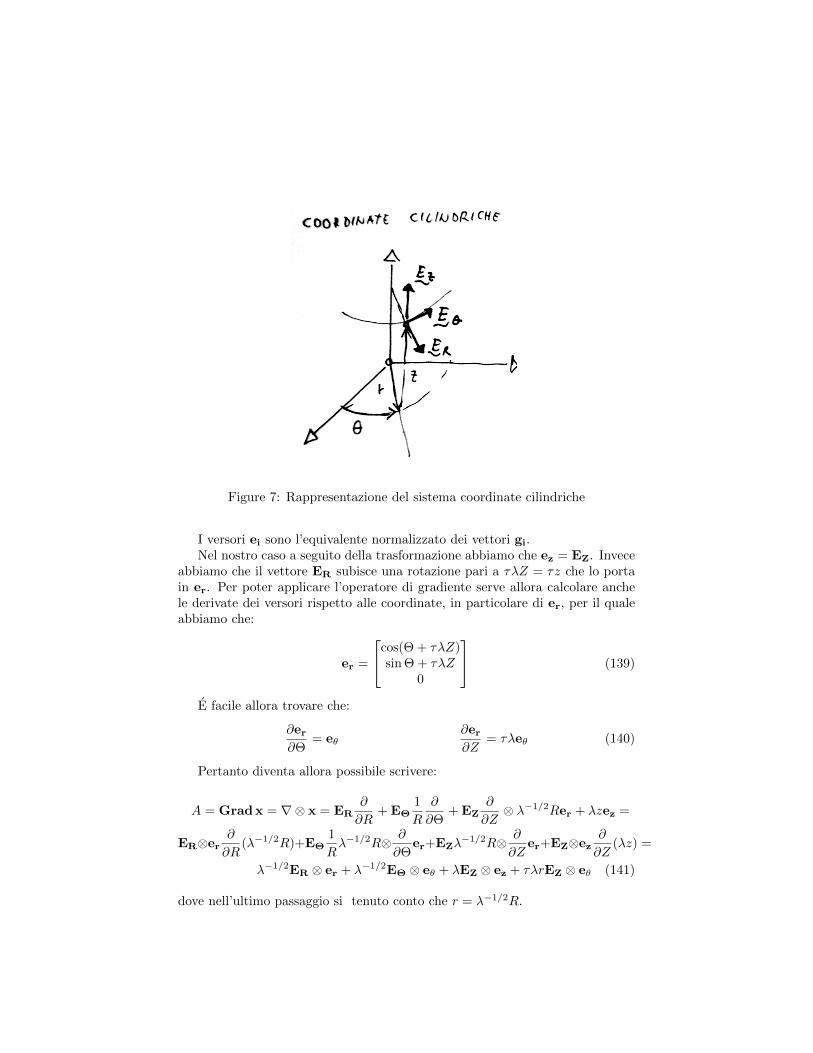
Figure 7: Rappresentazione del sistema coordinate cilindriche
I versori ei sono l’equivalente normalizzato dei vettori gi.Nel nostro caso a seguito della trasformazione abbiamo che ez = EZ. Invece
abbiamo che il vettore ER subisce una rotazione pari a τλZ = τz che lo portain er. Per poter applicare l’operatore di gradiente serve allora calcolare anchele derivate dei versori rispetto alle coordinate, in particolare di er, per il qualeabbiamo che:
er =
cos(Θ + τλZ)sin Θ + τλZ
0
(139)
E facile allora trovare che:
∂er
∂Θ= eθ
∂er
∂Z= τλeθ (140)
Pertanto diventa allora possibile scrivere:
A = Grad x = ∇⊗ x = ER∂
∂R+ EΘ
1
R
∂
∂Θ+ EZ
∂
∂Z⊗ λ−1/2Rer + λzez =
ER⊗er∂
∂R(λ−1/2R)+EΘ
1
Rλ−1/2R⊗ ∂
∂Θer+EZλ
−1/2R⊗ ∂
∂Zer+EZ⊗ez
∂
∂Z(λz) =
λ−1/2ER ⊗ er + λ−1/2EΘ ⊗ eθ + λEZ ⊗ ez + τλrEZ ⊗ eθ (141)
dove nell’ultimo passaggio si tenuto conto che r = λ−1/2R.

Figure 8: Schematizzazione della deformazione di torsione considerata
La rappresentazione matriciale di A pertanto la seguente:
A =
λ−1/2 0 00 λ−1/2 τλr0 0 λ
(142)
8.1.1 Modo alternativo
Un modo alternativo di derivare le stesse equazioni quello di sfruttare lo ja-cobiano delle trasformazioni tra i due sistemi di coordinate cilindrici, per cuiabbiamo dalla (133) che:
dr =
drdθdz
=
∂r∂R
∂r∂Θ
∂r∂Z
∂θ∂R
∂θ∂Θ
∂θ∂Z
∂z∂R
∂z∂Θ
∂z∂Z
dRdΘdZ
=
λ−1/2 0 00 1 λτ0 0 λ
dRdΘdZ
(143)
In generale chiameremo ARr la matrice per cui si ha che dr = ARr dR.Inoltre possibile ricavare anche le seguenti relazioni molto facilmente dx =
Arxdr e dX = ARXdR, con:
Arx =
1 0 00 r 00 0 1
ARX =
1 0 00 R 00 0 1
(144)
Pertanto alla fine semplice trovare l’espressione di dX = ARXARr−1Arx−1dx =
ARXArRA
xrdx = AxXdx

8.2 Deformazione di un corpo a simmetria sferica
Si consideri il caso di una sfera cava di raggio esterno A e raggio interno Bsottoposta a pressione interna p. Si supponga che la sfera si deformi isocori-camente per divenire una sfera di raggio esterno a e raggio interno b. La con-dizione di trasformazione isocora implica che dovr essere verificata la condizionedet(A) = 1.
In particolare l’altro assunto importante da considerare che sulla superificieinterna agisca una pressione interna p.
Figure 9: Rappresentazione del sistema coordinate sferiche
Un primo modo di affrontare il problema quello di considerare un sistemacartesiano di coordinate riferendosi con x e X alla configurazione deformata edindeformata rispettivamente. Data la simmetria del problema, si avr:
x = f(R)X (145)
dove
R = |X| =√
XTX =√XiXi (146)
Il gradiente :
A =dx
dX=∂f(R)
∂XX + f(R)I (147)
Dal momento che si pu scrivere per ogni coordinata xi = fXi, e denotandocome usuale con δij la funzione Delta di Kronecker si ottiene:
Aij =dxidXj
=∂f(R)
∂XjXi + f(R)δij =
∂f(R)
∂R
∂R
∂XjXi + f(R)δij =
= f ′(R)∂√XkXk
∂XjXi + f(R)δij (148)

Sviluppando il primo termine dell’ultimo membro nella 148 si ottiene:
∂√XkXk
∂Xj=∂(XkXk)1/2
∂Xj= 2
1
2(XkXk)1/2δkjXk = (XkXk)1/2Xj =
Xj
R(149)
Sostituendo quindi la (149) nella (148) si pu riscrivere direttamente in formamatriciale la (147) come:
A =dxidXj
= f ′(R)XiXj + f(R)δij = f ′(R)X⊗X + fI (150)
La relazione (150) non di facile interpretazione, dal momento che il sistemadi coordinate scelto non ottimale per il problema in esame. Si consideri quindiun sistema di coordinate sferiche che permettono di descrivere la trasformazionecome: r = f(R)
θ = Θφ = Φ
(151)
Le coordinate sferiche (V. Figura 10 nel sistema di riferimento siano:
Figure 10: Rappresentazione del sistema coordinate sferiche
?? x = r cos(θ) cos(φ)y = r sin(θ) sin(φ)z = r cos(θ)
(152)
I vettori di riferimento non normalizzati sono quindi dati da:
gr =
∂x∂r∂y∂r∂z∂r
=
sin(θ) cos(φ)
sin θ sin(φ)
cos(θ)
gφ =
∂x∂φ∂y∂φ∂z∂φ
=
−r sin(θ) sin(φ)
r sin(θ) cosφ
0
gθ =
∂x∂θ∂y∂θ∂z∂θ
=
r cos(θ) cos(φ)
r cos(θ) sin(φ)
−rsin(θ)
(153)
I versori ei, ottenuti normalizzando i diversi gi, sono invece i seguenti:
er =
sin(θ) cos(φ)
sin(θ) sin(φ)
cos(θ)
eφ =
− sin(φ)
cos(φ)
0
eθ =
cos(θ) cos(φ)
cos(θ) sin(φ)
−sin(θ)
(154)
Per ricavare l’espressione del gradiente in coordinate sferiche si noti, an-che esaminando la Figura 10, che uno spostamento infinitesimo esprimibileattraverso la seguente relazione:
d~l = drER + r sin(θ)dφEΦ + rdθEΘ (155)
Si pu quindi ricavare l’espressione seguente per il gradiente in coordinatesferiche:
Grad = ER∂
∂R+ EΦ
1
R sin(θ)
∂
∂Φ+ EΘ
1
R
∂
∂Θ(156)
Grad x terr conto di:

∂er
∂r =
0
0
0
∂er
∂φ =
− sin(θ) sin(φ)
sin(θ) cos(φ)
0
= sin(θ)eφ
∂er
∂θ =
− cos(θ) cos(φ)
sin(θ) cos(φ)
0
= eθ
(157)
Utilizzando le (157) si ricava:
∇⊗ x = f ′(R)er ⊗Er + Eφ1
R sin(θ)f(R)⊗ ∂er
∂φ+ Eθ ⊗
f(R)
R
∂er
∂θ=
= f ′(R)er ⊗Er + Eφ1
R sin(θ)f(R)⊗ sin(θ)eφ + Eθ ⊗ eθ =
= f ′(R)er ⊗Er +f(R)
Reφ ⊗Eφ +
f(R)
Reθ ⊗Eθ (158)
Scegliendo un sistema di coordinate sferiche si ottiene quindi una matrice Adiagonale: f ′(R) 0 0
0 f(R)R 0
0 0 f(R)R
(159)
Si pu quindi ora facilmente calcolare il determinante della matrice di de-formazione ed imporre che esso sia uguale a 1 (condizione di conservazione delvolume):
det(A) = f ′(R)f2(R)
R2= 1⇒ f ′(R) =
df
dR=
R2
f2(R)(160)
Si ottiene quindi un’equazione differenziale a variabili separabili facilmenteintegrabile:
f2(R)df = R2dR⇒ f3(R)
3=R3
3+ C (161)
da cui, considerando che r = f(R):
r =3√R3 + C (162)
Si noti che l’equazione risolutiva (162) poteva pi semplicemente essere ot-tenuta imponendo l’uguaglianza dei volumi della sfera cava deformata ed inde-formata:

4
3π(r3 − a3) =
4
3π(R3 −A3) (163)
Si vede allora come sia
r =3√R3 + a3 −A3 (164)
Si supponga ora, imposta la deformazione al materiale, di voler trovare letensioni principali del tensore di Biot, t1, t2 e t3. Considerando la simmetriadel problema, si pu scrivere una prima equazione di equilibrio radiale:
dt1dR
=2
R(t1 − t2) = 0 (165)
Richiamando XXX, data una opportuna funzione di energia W, si ha che:
ti =∂W
∂λi− pλ−1
i (166)
Da ci discende che:
t1 = ∂W∂λ1− pλ−1
1 λ1 = λ−2
t2 = ∂W∂λ2− pλ−1
2 λ2 = λ3 = λ(167)
Si ha inoltre che:
λ =
(1 +
a3 −A3
R3
)1/3
(168)
Per quanto riguarda la funzione di energia si pu scrivere che:
W (λ1, λ2, λ3) = W (λ−2, λ, λ) = W (λ) (169)
W ′(λ) =∂W
∂λ1
∂λ1
∂λ+ 2
∂W
∂λ2
∂λ2
∂λ= −2t1λ
−3 + 2t2 (170)
Si ha inoltre che l’equazione (168) pu essere derivata rispetto a R ottenendo:
3λ2R3 ∂λ
∂R+ 3λ3R2 = 3R2 (171)
Rdλ
dR= λ−2 − λ⇒ 1
dR=
1
dλ
λ−2 − λR
(172)
Sostituendo la (172) nella (165), e riconsiderando anche la (170) si pu scri-vere: {
12W
′(λ) = t2 − t1λ−3 = (t2 − t1) + t1(1− λ−3)dt1dλ = −2 (t1−t2)
λ(1−λ−3)
(173)
Unendo le due equazioni si pu scrivere:
1
2
W ′
1− λ−3= −λ
2
dt1dλ
+ t1 (174)
W ′
λ3 − 1=
1
λ2
dt1dλ− 2
λ3t1 =
d
dλ
(t1λ2
)(175)
Per integrare la (175) necessario imporre opportune condizioni al bordo:{r = B t1 = 0
r = A t1 = −pλ2a
(176)
Si pu quindi ottenere:
p =
∫ λb
λa
W ′
λ3 − 1dλ (177)
Ottenuto questo risultato, pu essere interessante esaminare il caso particolarein cui i raggi esterno ed interno della sfera cava siano quasi uguali. Fisicamente,un tale caso si pu ad esempio riscontrare nel gonfiaggio di mongolfiere. Sisupponga quindi, per semplificare i successivi passaggi matematici, che si abbia:
B −AA
=1
3ε (178)
ossiaB
A= 1 +
1
3ε (179)
Applicando alla (177) il teorema del valore medio, otteniamo:
p =W ′
λ3 − 1(λb − λa) (180)
dove si assume che λb ∼= λa. Sappiamo inoltre che la trasformazione isocoricasoddisfa il vincolo di
(λ3a − 1) =
(B
A
)3
(λ3b − 1) (181)
che mediante la (179) puo essere semplificato come, tenendo conto di (1 +x)n = 1 + nx per x << 1:
(λ3a − 1) = (1 + ε)(λ3
b − 1) (182)
Da cui:(λ3a − λ3
b) = ε(λ3b − 1) (183)
Per cui la (180) puo essere approssimato come
p = W ′ε
3λ3(184)

Name c10 c01
MR1 10 0.1MR2 10 0.2MR3 10 0.5NH1 10 0
Table 1: Tabella dei parametri relativi alla figura 11
dove si tenuto conto della seguente approssimazione:
(λa − λb)(λ3b − 1)
= ε(λa − λb)(λ3a − λ3
b)=
ε
λ2a + λ2
b + λaλb≈ ε
3λ3(185)
L’espressione (184) puo essere facilmente valutata per diversi materiali, dimodo da valutare l’effetto legato alla diversa energia assunta. E di interesseconfrontare ad esempio il caso di un material neohooekeano con un materiale diMooney Rivlin.
Il confronto delle due soluzioni stato portato avanti in ANSYS8.0 ed inMatlab, di cui ora si riportano i risultati principali.
Utilizzando il simbolico di Matlab semplice ricavare una espressione
syms l1 l2 l3 l c10 c01 real %%%definizione delle variabili simboliche
l1=l;l2=l; %%%l sta per lamda
l3=l^(-2);
I1=l1^2+l2^2+l3^2;
I2=l1^2*l2^2+l1^2*l3^2+l3^2*l2^2;
W=c10*(I1-3)+c01*(I2-3);
dW=diff(W,l);
L’espressione pu generale che si puo trovare per l’energia di deformazionenel caso di un materiale di Neohookean o di Mooney-Rivlini data da:
W ′(λ) =1
λ
n∑p=1
2µp(λαp − λ−2αp) (186)
dove con α1 = 2 e α2 = −2 si ottiene l’espressione dell’energia per un materialedi Mooney-Rivlin pari a:
W ′ = c10(4λ− 4λ−5) + c01(4λ3 − 4λ−3); (187)
Il materiale di Neohookean si trova imponendo c01 = 0.Si consideri il caso numerico in cui B = 100 ed A = 99. Si ottengono allora
le seguenti curve relativamente ad i valori dei parametri riportati in tabella1.Si noti in particolare come le curve ottenute, rappresentate in figura 11, pre-
sentino per il caso dei materiali di tipo Mooney-Rivlin un andamento caratteris-tico con un massimo seguito da un minimo di pressione. Questo comportamento
0 5 10 15 20 25 30
0
0.1
0.2
0.3
0.4
0.5
0.6
λ
MR1MR2MR3NH1
p
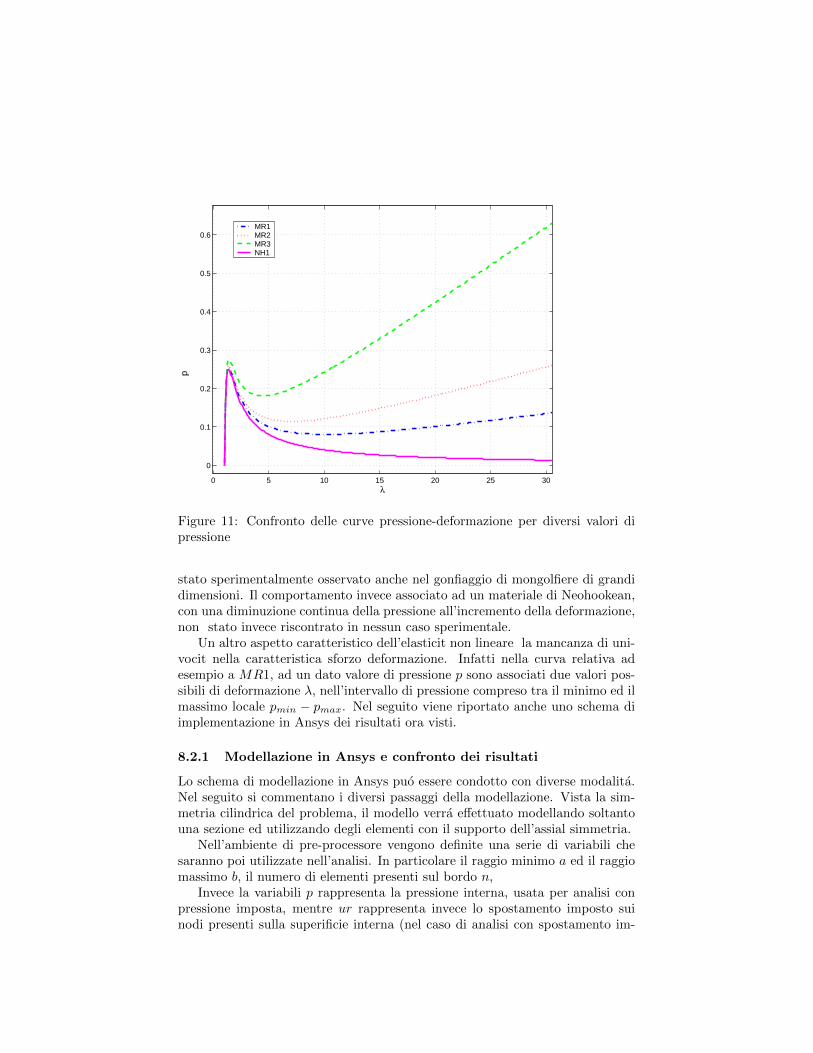
Figure 11: Confronto delle curve pressione-deformazione per diversi valori dipressione
stato sperimentalmente osservato anche nel gonfiaggio di mongolfiere di grandidimensioni. Il comportamento invece associato ad un materiale di Neohookean,con una diminuzione continua della pressione all’incremento della deformazione,non stato invece riscontrato in nessun caso sperimentale.
Un altro aspetto caratteristico dell’elasticit non lineare la mancanza di uni-vocit nella caratteristica sforzo deformazione. Infatti nella curva relativa adesempio a MR1, ad un dato valore di pressione p sono associati due valori pos-sibili di deformazione λ, nell’intervallo di pressione compreso tra il minimo ed ilmassimo locale pmin − pmax. Nel seguito viene riportato anche uno schema diimplementazione in Ansys dei risultati ora visti.
8.2.1 Modellazione in Ansys e confronto dei risultati
Lo schema di modellazione in Ansys puo essere condotto con diverse modalita.Nel seguito si commentano i diversi passaggi della modellazione. Vista la sim-metria cilindrica del problema, il modello verra effettuato modellando soltantouna sezione ed utilizzando degli elementi con il supporto dell’assial simmetria.
Nell’ambiente di pre-processore vengono definite una serie di variabili chesaranno poi utilizzate nell’analisi. In particolare il raggio minimo a ed il raggiomassimo b, il numero di elementi presenti sul bordo n,
Invece la variabili p rappresenta la pressione interna, usata per analisi conpressione imposta, mentre ur rappresenta invece lo spostamento imposto suinodi presenti sulla superificie interna (nel caso di analisi con spostamento im-
posto).
/prep7
!-----Definizione delle dimensioni della geometria-----
!Variabili indipendenti
a=99 !raggio interno
b=100 !raggio esterno
n=8 !numero di elementi ai bordi soluzione con 10
p=0.2 !pressione interna
ur=2000.0 !500
t=600 !numero di passi 600
pi=3.14159265
angle=2
!Variabili dipendenti
es= angle/180*pi*b/n !dimensione dell’elemento
La variabile es costituisce invece la dimensione dell’elemento utilizzato, men-tre l’angolo angle ci dice il settore angolare che viene modellato.
Per la definizione dell’elemento esistono diverse opzioni attivabili. Si puoutilizzare l’elemento hyper74 che consente di assegnare al corpo di Mooney-Rivlin un modulo specifico µ di Poisson, che quindi rappresenta un’equazione divincolo aggiuntivo al problema. E chiaro che nel caso di corpo non comprimibilesi ha che exx + eyy + ezz = (1 + 2µ)exx = 0, che equivale ad imporre il valore diµ = 0.5. Per ragioni numeriche di convergenza tale valore verra approssimatoad un valore di 0.4999
!-----Definizione elementi-----
et,1,hyper74 !Elemento del corpo deformabile
keyopt,1,3,1 !Definizione dell’assialsimmetria
!Condizione di incompressibilit imposta mediante modulo di Posiooin
mp,prxy,1,.499999 !maximum nuxy
mp,nuxy,1,.499999 !minimum nuxy
TB,MOONEY !Activate 3 parameter Mooney-Rivlin data table
TBDATA,1,10 !Define c10
TBDATA,2,0.1 !Define c01
Un’altr possibilit si ottiene invece utilizzando l’elemento plane183, il qualegarantische anch’esso il suppporto per l’iperlasticit. In questo caso per neces-sario utilizzare una formulazione dell’energia modificata , data da:

W = c10(I1 − 3) + c01(I2 − 3) +1
d(J − 1) (188)
Durante la convergenza l’energia elastica W del sistema viene minimizzata epertanto se d molto piccolo come valore, la funzione (J−1)→ 0, e quindi il ma-terial tender alla condizione di incompressibilit. Il significato della terza costanted = 1E − 10 consente appunto di impostare un materiale come incomprimibile.
!-----Definizione elementi-----
et,1,plane183 !Elemento del corpo deformabile
keyopt,1,3,1 !Definizione dell’assialsimmetria
TB,HYPER,,,2,MOONEY !Activate 3 parameter Mooney-Rivlin data table
TBDATA,1,10 !Define c10
TBDATA,2,0.1 !Define c01
TBDATA,3,1E-10 !Define incompressibility parameter
!(as 2/K, K is the bulk modulus)
La definizione della geometria avviene in maniera semplice, in quanto sisceglie un sistema di coordinate cilindriche, il quale consente di associare altracciamento di linee il tracciamento di cerchi quando viene fatta variare laseconda coordinata.
Figure 12: Linee con vincoli delimitanti la geometria
!----- Definizione della geometria-----
csys,1
k,1,a,0
k,2,b,0
k,3,b,angle
k,4,a,angle
l,1,2
l,2,3
l,3,4
l,4,1
!Area
a,1,2,3,4
esize,es
amesh,1
In particolare, data l’assial simmetria del problema, che non limitata soltantoad un asse, ma a tutti gli assi possibili di simmetria passanti per il centro dellasfera, sufficiente modellare solo uno settore circolare di una corona sferica, edapplicare opportunamente i vincoli di simmetria.
I vincoli imposti, sono appunto di simmetria intorno alle linee 1 e 3.
!-----Imposizione dei vincoli
csys,0
dl,3,,symm,0
dl,1,,symm
L’analisi puo quindi essere condotta in due modalit principali:
Applicazione dello spostamento In questo caso l’analisi univoca, in quanto aciascun spostamento nodale associato una deformazione λ, a cui associatoin maniera univoca un dato stato di tensione.
Applicazione del carico In questo caso l’analis non univoca, e non garantiscedi trovare tutte le soluzioni, soprattutto quando il problema presenta al-meno 2 soluzioni in termini di spostamenti λ associati allo stesso valore dipressione.
Per eseguire l’analisi applicando un vincolo di spostamento si procede sec-ondo quanto segue:
!---------Applicazione invece del vincolo di spostamento
csys,1
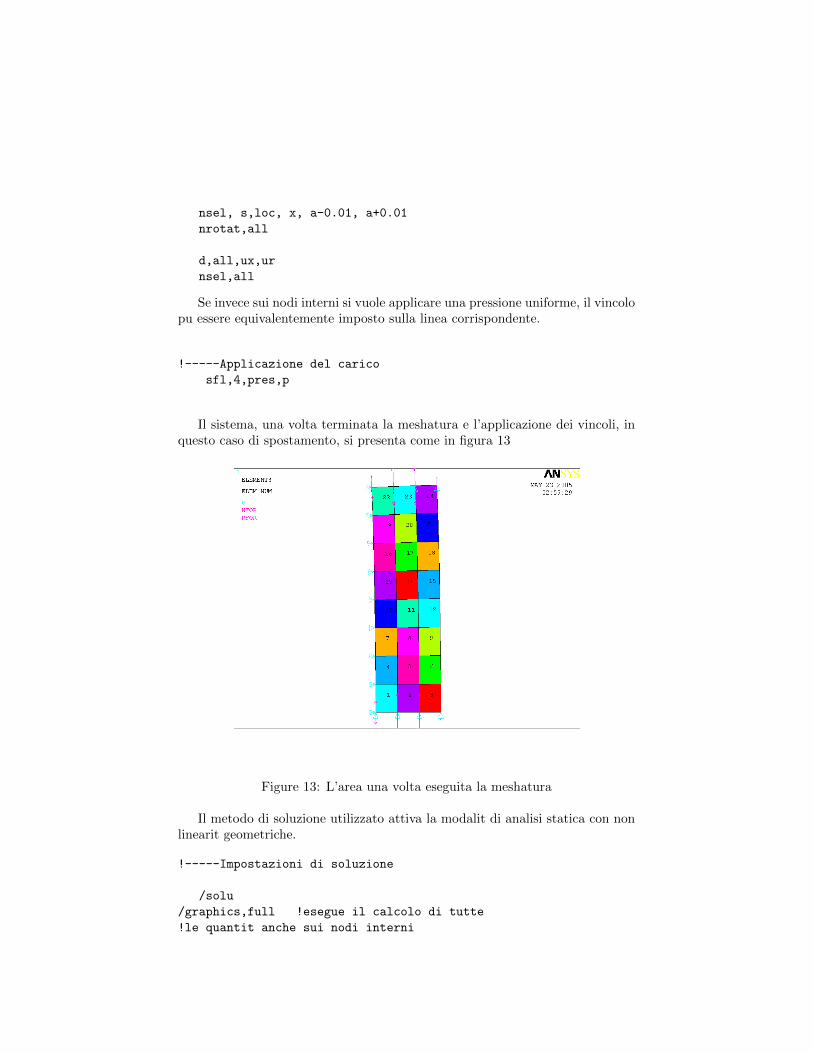
nsel, s,loc, x, a-0.01, a+0.01
nrotat,all
d,all,ux,ur
nsel,all
Se invece sui nodi interni si vuole applicare una pressione uniforme, il vincolopu essere equivalentemente imposto sulla linea corrispondente.
!-----Applicazione del carico
sfl,4,pres,p
Il sistema, una volta terminata la meshatura e l’applicazione dei vincoli, inquesto caso di spostamento, si presenta come in figura 13
Figure 13: L’area una volta eseguita la meshatura
Il metodo di soluzione utilizzato attiva la modalit di analisi statica con nonlinearit geometriche.
!-----Impostazioni di soluzione
/solu
/graphics,full !esegue il calcolo di tutte
!le quantit anche sui nodi interni

antype,static
nlgeom,on
solcontrol,on
autots,on
nropt,full
time,t
deltim,0.5,0.25,1
outres,all,all
solve
L’analisi di post processing viene eseguita invece nell’ambiente di ”Time His-tory post-processing”. In particolare le quantit restituite da Ansys per ciascunelemento nel caso di analisi iperelatica, sono il tensore di Cauchy, ad esempio lesue coordinate principali date da S. Inoltre data la decomposizione A = RU delgradiente di deformazione, Ansys restituisce il valore logaritmico degli autovaloridi U , denominati Hencky strains, dati da εi = ln(λi).
Post processing analysis
!sarebbe l’equivalente del Time hist procesor
/post26
!va selezionato una soluzione di elemento
!la prima variabile cmq il tempo
!definizione delle variabili associate all’elemento 1
esol,2,10,,EPEL,1,strain1
esol,3,10,,EPEL,3,strain3
esol,4,10,,S,1, pres1
esol,5,10,,S,3, pres3
!!elementi 11, 12
!operazione di conversione dello Hencky strain mediante esponenziale
exp,6,2,,,estrain1
!indicazione di usare la variabile 6 sull’asse delle x invece del tempo
xvar,6
exp,7,3,,,estrain3
!prodotto per -1
prod,9,5,,,mpres3,,,-1
!------Plot della variabile 9
plvar,9
!plot delle forze residue nel general
! post processor durante l’analisi della convergenza
/post1
plnsol,NRRE,fx
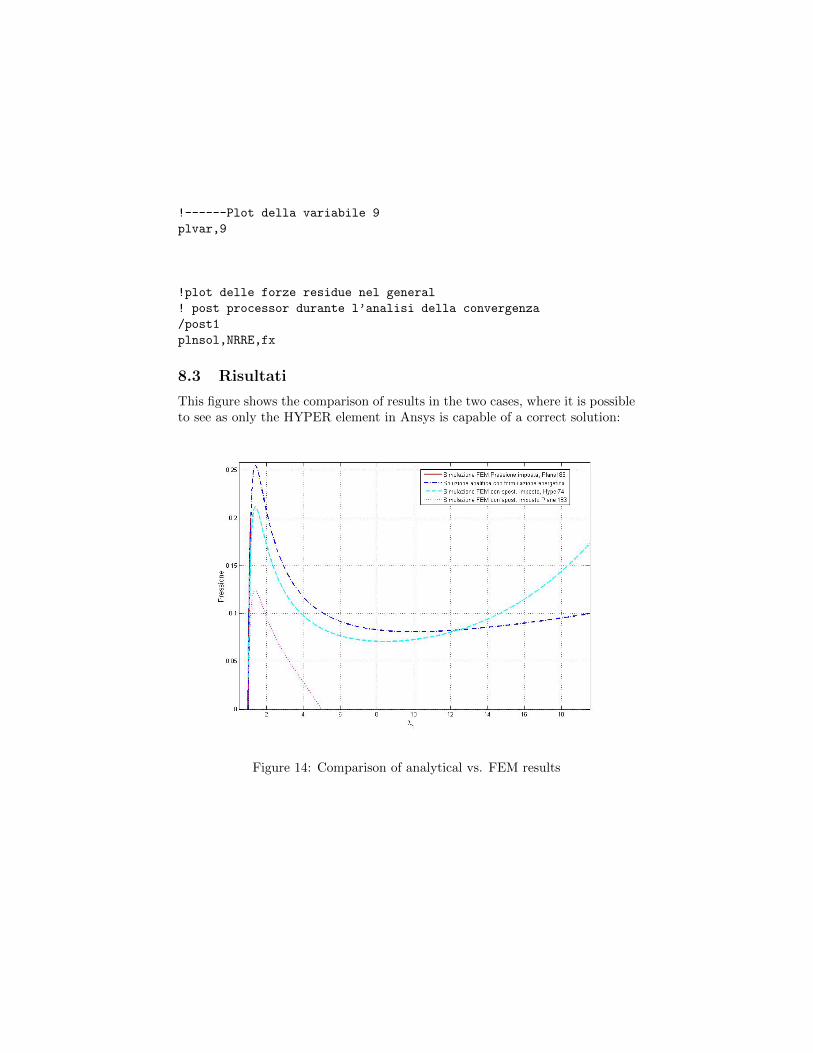
8.3 Risultati
This figure shows the comparison of results in the two cases, where it is possibleto see as only the HYPER element in Ansys is capable of a correct solution:
Figure 14: Comparison of analytical vs. FEM results
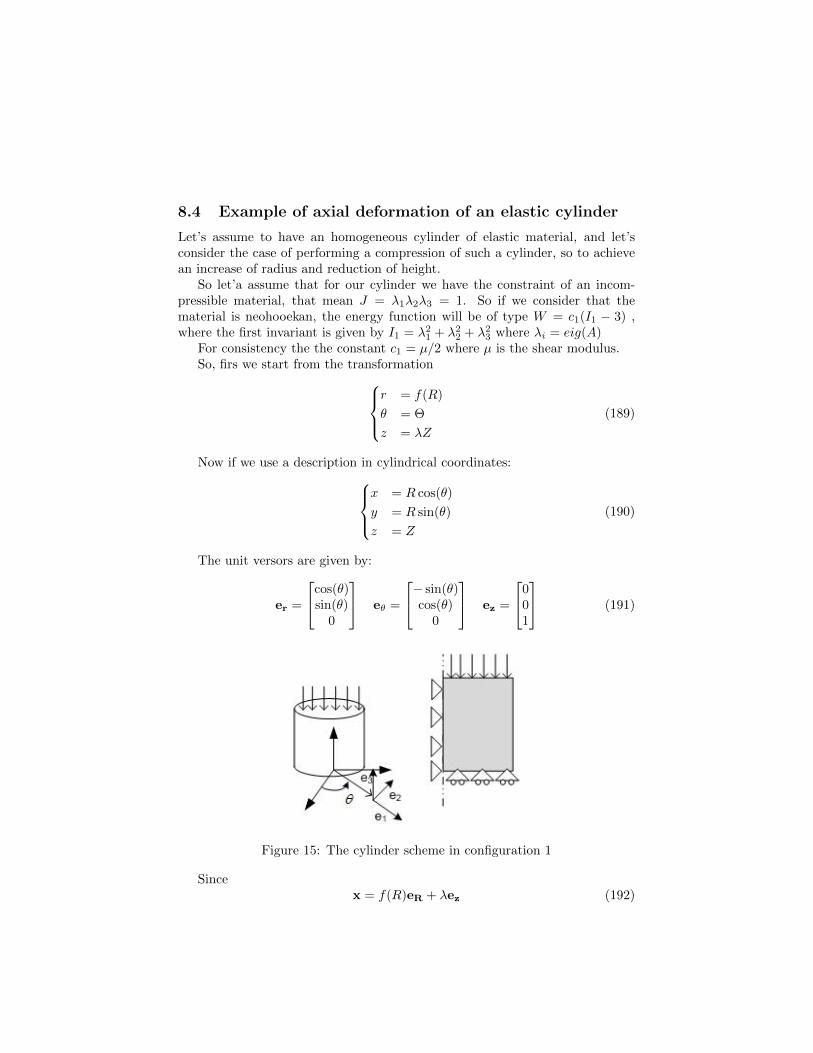
8.4 Example of axial deformation of an elastic cylinder
Let’s assume to have an homogeneous cylinder of elastic material, and let’sconsider the case of performing a compression of such a cylinder, so to achievean increase of radius and reduction of height.
So let’a assume that for our cylinder we have the constraint of an incom-pressible material, that mean J = λ1λ2λ3 = 1. So if we consider that thematerial is neohooekan, the energy function will be of type W = c1(I1 − 3) ,where the first invariant is given by I1 = λ2
1 + λ22 + λ2
3 where λi = eig(A)For consistency the the constant c1 = µ/2 where µ is the shear modulus.So, firs we start from the transformation
r = f(R)
θ = Θ
z = λZ
(189)
Now if we use a description in cylindrical coordinates:x = R cos(θ)
y = R sin(θ)
z = Z
(190)
The unit versors are given by:
er =
cos(θ)sin(θ)
0
eθ =
− sin(θ)cos(θ)
0
ez =
001
(191)
Figure 15: The cylinder scheme in configuration 1
Sincex = f(R)eR + λez (192)

∇⊗ x = (eR∂
∂R+ eθ
1
R
∂
∂θ+ ez
∂
∂z)⊗ z
(193)
so since∂eR
∂eθwe find the general expression for matrix A as:
∇⊗ x = f ′(R)ER ⊗ eR +f(R)
REθ ⊗ eθ + λEZ ⊗ ez
(194)
So the expression for A is given by
A =
f ′(R) 0 0
0 f(R)R 0
0 0 λ
(195)
that means so: λ1 = f ′(R)
λ2 = f(R)R
λ3 = λ
(196)
When impose the constraint of incompressibility for our material that is
det(A) = 1, we then findf ′(R)f(R)
Rλ = 1 and by performing the integration
through separation of variables we find that
fdf =R
λdR =⇒ f2 = R2 + C
(197)
since the problem is axialsymmetric and point with R = 0 are mapped topoint with r = f(R) = 0, this implies that C = 0 and so
f(R) =R√λ
=⇒
λ1 = 1
λ
λ2 = 1λ
λ3 = λ
(198)
and of course the property that
λ21 =
1
λ(199)

Equilibrium equations It now comes to the equilibrium equations, that canderived by imposing the div(σ) = 0, where σ if the Cauchy true stresses tensor.Due to the symmetry of the problem, the first equilibrium equations can bewritten as, using as notation σ1 = σrr and σ2 = σθθ
∂σ1
∂R+
1
R(σ1 − σ2) = 0 (200)
where as defined W = c1(λ21 + λ2
2 + λ23) and c1 = 2µ
and in general we have σi =∂W
∂λi− p
λi, since J = 1 due to incompressibility
constraint, that makes Kirchoff stress tensor τ coincident with the Cauchy truestress tensor σ.
So we easily find the condition that:
σi = λi∂W
∂λi− p = µλ2
i − p (201)
Now we need to impose the constraint equations and we will solve this intwo conditions.
Condition 1 The first one is the configuration of axial compression as shownin figure 15. So in this case it is easy to derive the constraints that the radialstress should be equal to zero, as the lateral surface is free. So we have thatfrom (201)
σ1 = 0 =⇒ p = µλ21 and so
σ3 = µλ23 − p = µ(λ2
3 − λ21) = µ(λ− 1
λ) (202)
where expression (199) has been used.
Condition 2 Let’s assume to change the state of stress, by using a radialexternal traction on the lateral surface to create the same deformation. So inthis case, referring to figure Figure 16
So in this case it is easy to derive the constraints that the radial stress shouldbe equal to zero, as the lateral surface is free. So we have that from (201)
σ3 = 0 =⇒ p = µλ23 and so
σ1 = µλ13 − p = µ(λ2
1 − λ23) = µ(λ2
1 −1
λ41
) (203)
where expression (199) has been used and the expression to be considered for
λ1 =r
R.
Ansys modeling This ia case of plain strain axysymmetric deformation of acylinder. This an example of modeling inside Workbench 14.5.
Figure 16: The cylinder scheme in configuration 2
Condition 1 This is the final outcome that shows how the ansys modeland a strong fit with the anaylitical results
Inside APDL we can use the following code
finish
/clear
/prep7
!-----Definizione delle dimensioni della geometria-----
!Variabili indipendenti
a=15 !raggio cilindro
b=30 !altezza cilindro
n=20 !numero di elementi ai bordi soluzione con 10
!displacement imposed
ur=20.0 !500
t=100 !numero di passi 600
!Variabili dipendenti
es= a/n !dimensione dellelemento
!!opzione 1
!-----Definizione elementi-----
et,1,hyper74 !Elemento del corpo deformabile
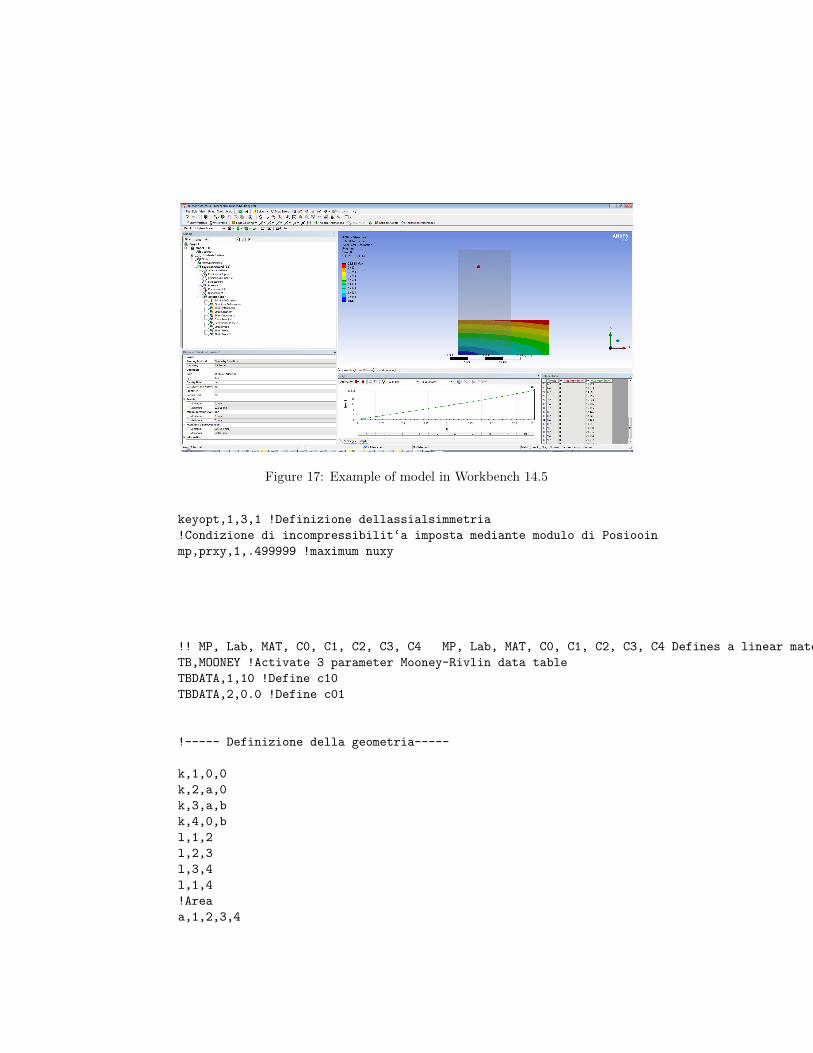
Figure 17: Example of model in Workbench 14.5
keyopt,1,3,1 !Definizione dellassialsimmetria
!Condizione di incompressibilit‘a imposta mediante modulo di Posiooin
mp,prxy,1,.499999 !maximum nuxy
!! MP, Lab, MAT, C0, C1, C2, C3, C4 MP, Lab, MAT, C0, C1, C2, C3, C4 Defines a linear material !property as a constant or a function of temperature.
TB,MOONEY !Activate 3 parameter Mooney-Rivlin data table
TBDATA,1,10 !Define c10
TBDATA,2,0.0 !Define c01
!----- Definizione della geometria-----
k,1,0,0
k,2,a,0
k,3,a,b
k,4,0,b
l,1,2
l,2,3
l,3,4
l,1,4
!Area
a,1,2,3,4
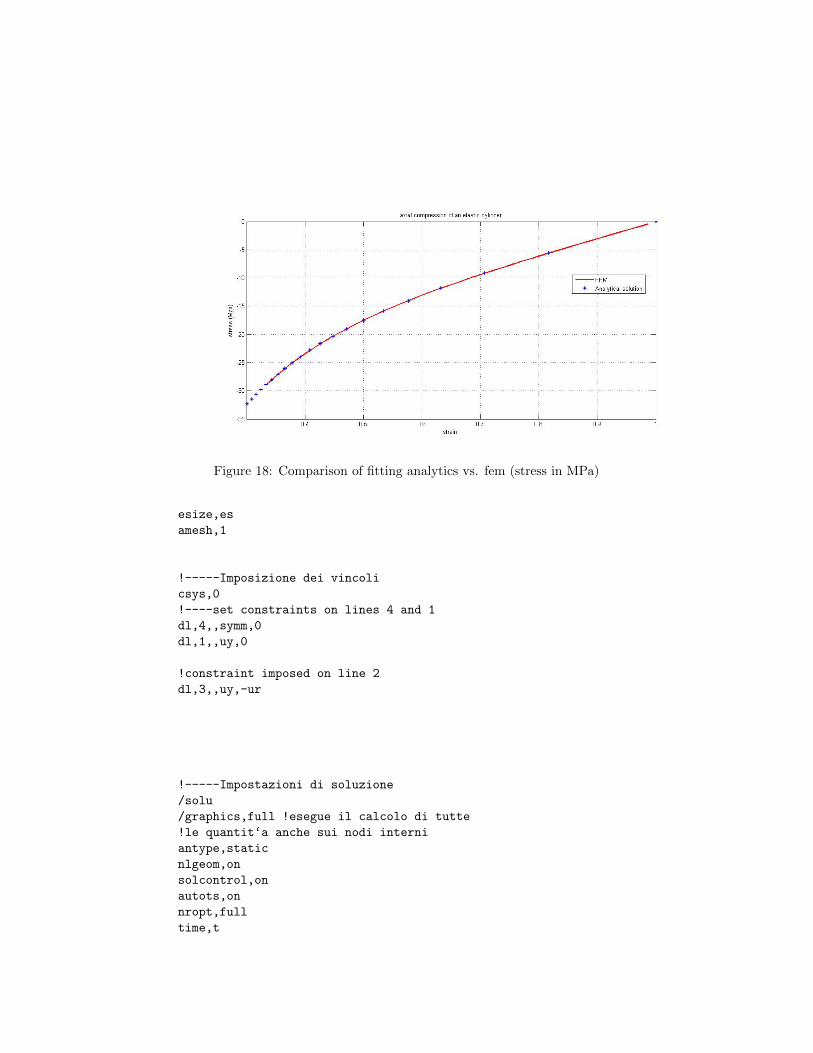
Figure 18: Comparison of fitting analytics vs. fem (stress in MPa)
esize,es
amesh,1
!-----Imposizione dei vincoli
csys,0
!----set constraints on lines 4 and 1
dl,4,,symm,0
dl,1,,uy,0
!constraint imposed on line 2
dl,3,,uy,-ur
!-----Impostazioni di soluzione
/solu
/graphics,full !esegue il calcolo di tutte
!le quantit‘a anche sui nodi interni
antype,static
nlgeom,on
solcontrol,on
autots,on
nropt,full
time,t
deltim,0.5,0.25,1
outres,all,all
solve
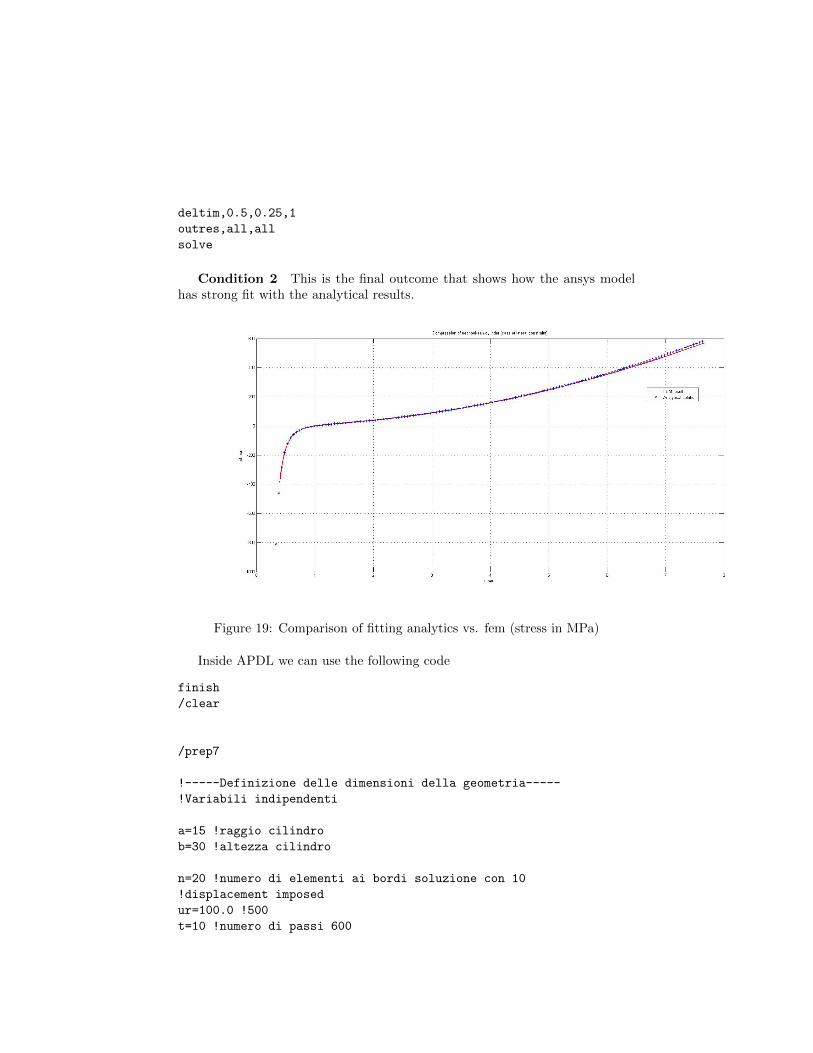
Condition 2 This is the final outcome that shows how the ansys modelhas strong fit with the analytical results.
Figure 19: Comparison of fitting analytics vs. fem (stress in MPa)
Inside APDL we can use the following code
finish
/clear
/prep7
!-----Definizione delle dimensioni della geometria-----
!Variabili indipendenti
a=15 !raggio cilindro
b=30 !altezza cilindro
n=20 !numero di elementi ai bordi soluzione con 10
!displacement imposed
ur=100.0 !500
t=10 !numero di passi 600
!Variabili dipendenti
es= a/n !dimensione dellelemento
!!opzione 1
!-----Definizione elementi-----
et,1,hyper74 !Elemento del corpo deformabile
keyopt,1,3,1 !Definizione dellassialsimmetria
!Condizione di incompressibilit‘a imposta mediante modulo di Posiooin
mp,prxy,1,.499999 !maximum nuxy
!! MP, Lab, MAT, C0, C1, C2, C3, C4 MP, Lab, MAT, C0, C1, C2, C3, C4 Defines a linear material !property as a constant or a function of temperature.
TB,MOONEY !Activate 3 parameter Mooney-Rivlin data table
TBDATA,1,5 !Define c10=5 that means mu=10
TBDATA,2,0.0 !Define c01
!----- Definizione della geometria-----
k,1,0,0
k,2,a,0
k,3,a,b
k,4,0,b
l,1,2
l,2,3
l,3,4
l,1,4
!Area
a,1,2,3,4
esize,es
amesh,1
!-----Imposizione dei vincoli
csys,0
!----set constraints on lines 4 and 1
dl,4,,symm,0
dl,1,,uy,0
!constraint imposed on line 2
dl,2,,ux,ur
For the analysis of solution, remember to convert the strain from Ansys inexponential form, in this case the solution for element 789 is requested.
!!alternative formulation in terms of x and y stresses
!sarebbe lequivalente del Time hist procesor
/post26
!va selezionato una soluzione di elemento
!la prima variabile ‘e cmq il tempo
!definizione delle variabili associate allelemento 1
esol,2,789,,EPEL,X,strain1
esol,3,789,,EPEL,Y,strain3
esol,4,789,,S,X, pres1
esol,5,789,,S,Y, pres3
!!elementi 11, 12
!operazione di conversione dello Hencky strain mediante esponenziale
exp,6,2,,,estrain1
!indicazione di usare la variabile 6 sullasse delle x invece del tempo
xvar,6
exp,7,3,,,estrain3
!prodotto per -1
9 I metodi continui e il metodo degli elementifiniti
Sono numerosi i motivi per i quali i metodi continui sono tra i pi usati nellasimulazione dei corpi deformabili: l’accuratezza dell’approssimazione superiorea quella di tutti i metodi sinora descritti, la grande quantit di studi disponibilesul metodo e di software per la creazione di mesh e di soluzione dei sistemi,la notevole versatilit del metodo che si presta a molti tipi di analisi differenti,l’utilizzo, per la definizione del metodo, di equazioni sul corpo inteso come un do-minio continuo che permette di utilizzare i dati ricavati da prove sperimentali perdefinire a priori le caratteristiche fisiche del corpo da simulare. L’inconvenienteprincipale dei questo genere di metodi, che ne limita fortemente l’uso nel campodella realt virtuale, per la grande quantit di calcoli richiesti per ottenere lasoluzione, per questo, in tutti i modelli di corpi deformabili implementati conmodelli continui, la ricerca fortemente orientata alla creazione di sistemi disemplificazione che permettano di limitare il costo computazionale e otteneretempi di calcolo ridotti.
Nel campo della realt virtuale i metodi impiegati sono tre, il metodo deglielementi finiti (FEM dall’inglese Finite Elements Method) molto usato in tuttii campi dell’ingegneria e per questo conosciuto in modo molto approfondito,il metodo degli elementi al contorno (BEM - Boundary Elements Method)anch’esso conosciuto ed usato nel campo dell’ingegneria e il metodo delle sferefinite (FSM - Finite Sphere Method) un nuovo metodo sviluppato da De e Bathein De and K.J. (2000) nell’ambito dei metodi numerici detti meshless perch nonrichiedono l’utilizzo di una suddivisione del dominio in elementi predefiniti (sud-divisione che in inglese detta mesh).
Bench con formulazioni matematiche molto differenti i metodi indicati sonodei sistemi di risoluzione numerica di equazioni differenziali parziali. In essiil dominio in esame viene suddiviso in sottodomini pi piccoli, detti elementi,all’interno dei quali la funzione incognita calcolata mediante l’interpolazione,con l’uso di opportune funzioni approssimanti dette funzioni di forma, dei valoriche questa assume in punti particolari del sottodominio detti nodi. Nel FEMe nel BEM il numero di nodi per ogni elemento variabile mentre nel FSMogni sfera ha un solo nodo: il suo centro. La soluzione del problema diventaquindi la soluzione di un sistema con un numero grande ma comunque finito diincognite che sono appunto i valori che la funzione incognita assume nei nodi.Chiaramente diminuendo la dimensione degli elementi il numero dei nodi au-menta, questo comporta un aumento della precisione del risultato ma anche unaumento della quantit di calcoli richiesta.
La grande diversit di implementazione dei tre metodi, ovviamente, fa s cheognuno presenti caratteristiche molto differenti che lo rendono pi o meno indicatonell’affrontare un dato problema. La tabella ?? riassume le caratteristiche pi

importanti dei tre metodi nel campo della simulazione di oggetti deformabili.Si vede come nessuno dei tre metodi sia migliore degli altri a priori cos,
nonostante si noti una maggiore diffusione del FEM anche a causa della mag-giore conoscenza che si ha di questo metodo, tutti e tre sono utilizzati nellasimulazione degli oggetti deformabili. Esistono anche delle ricerche volte ad ot-tenere sistemi ibridi che uniscano i pregi di modelli diversi, in Kim et al. (2003),per esempio viene utilizzato un sistema che determina la deformazione localedell’oggetto con il FSM mentre ricava la deformazione globale dal BEM. Diseguito verr descritta la formulazione del metodo degli elementi finiti.
9.1 Il metodo degli elementi finiti
Nello studio dell’elasticit dei materiali le incognite nel sistema derivante dalladiscretizzazione agli elementi finiti sono i vettori spostamento dei nodi degli el-ementi, tramite i quali, mediante le funzioni di forma, si approssima il vettorespostamento di un punto qualunque interno al corpo. Indicando con u il vet-tore degli spostamenti del punto interno all’elemento e con un il vettore deglispostamenti dei nodi dell’elemento, secondo la relazione:
u = Neun (204)
dove la matrice delle funzioni di forma. Per un elemento con m nodi, ognuno deiquali ha g gradi di libert la matrice Ne ha g righe e (m·n) colonne. Nell’esempiodi figura 20 l’elemento ha tre nodi con due gradi di libert ciascuno. Si avr allorau = [ux uy]T , un = [ui uj uk]T (avendo indicato con ui = [uix u
iy]T il vettore
a due componenti degli spostamenti del generico nodo i-esimo) e la matrice Ne
sar di dimensioni (2× 6).
i=( x i , y i )
j
k
u i =( u x i , u y
i ) u j
u k p
u =( u x , u y ) x
y
Figure 20: Elemento triangolare nel piano

Le funzioni di forma, per rappresentare una valida approssimazione deglispostamenti, devono soddisfare alcune condizioni 6:
1. Devono assumere in ogni nodo il valore dello spostamento del nodo stesso.Suddividendo la matrice Ne in sottomatrici quadrate tali che Ne = |Ni Nj Nk|per l’elemento triangolare dell’esempio precedente, si deve avere quindiche: {
Nei (xj , yj) = Ig se i = j,
Nei (xj , yj) = Og se i 6= j,
(205)
Avendo definito con Ig e Og rispettivamente la matrice identit e la matricenulla (g × g).
2. Per garantire la congruenza degli spostamenti ai bordi dei domini, devonoessere tali che la funzione abbia, sul bordo dell’elemento, lo stesso anda-mento per entrambi gli elementi afferenti al segmento. Da ci discende chele funzioni di forma sul bordo devono dipendere solo dalle variabili rela-tive ai nodi collegati al bordo stesso; gli elementi che soddisfano questacondizione si dicono compatibili, non sempre per possibile trovare dellefunzioni che rendano gli elementi compatibili, in questo caso la funzionecongruente solo ai nodi degli elementi.
Esistono inoltre altre tre condizioni che le funzioni di forma devono soddisfareper garantire che la soluzione approssimata converga a quella esatta7:
1. Le funzioni di forma devono essere tali che, qualora l’elemento sia soggettoa moto rigido, le deformazioni risultanti siano nulle.
2. La deformazione dell’elemento deve essere costante qualora le condizionial contorno siano compatibili con tale stato.
3. Le deformazioni risultanti devono essere limitate ai bordi degli elementi
Per ogni tipo di elemento esistono diverse funzioni che soddisfano le condizionisopra scritte, nel caso dell’elemento triangolare, la pi semplice ha andamentolineare. La matrice delle funzioni di forma Ne assume la forma:
Ne =
[L1 0 L2 0 L3 00 L1 0 L2 0 L3
](206)
A titolo di esempio viene riportato l’andamento della funzione L3 essendo L1
ed L2 qualitativamente identichePer migliorare l’approssimazione si possono anche utilizzare funzioni di grado
superiore che si ottengono semplicemente aggiungendo dei nodi all’elemento, afronte di una maggiore precisione del calcolo ne deriva per un aumento della
6Per una trattazione pi approfondita dell’argomento vedere, per esempio, Carmignani(1990); Zienkiewicz and Taylor (2000).
7Per una trattazione approfondita dell’argomento si rimanda a Carmignani (1990);Zienkiewicz and Taylor (2000).

i
j
k
1
x
y
Figure 21: Esempio di L3 per l’elemento triangolare
quantit di calcoli necessaria alla risoluzione del sistema.
Una volta nota la funzione spostamento all’interno dell’elemento, possibilederivare la deformazione in ogni punto, applicando a un un’operatore differen-ziale che esplicita le note equazioni di congruenza:
εij =1
2(∂ui∂xj
+∂uj∂xi
) (207)
dove ui la componente i-esima dello spostamento e xi la componente i-esimadel sistema di riferimento; si ottiene allora:
ε = Beu (208)
dove ε rappresenta il vettore deformazioni per il generico punto p appartenenteall’elemento e la matrice Be si ottiene differenziando opportunamente gli ele-menti della Ne .
Il vettore σ delle tensioni corrispondenti alle suddette deformazioni si trovano,ipotizzando un legame costitutivo di tipo lineare descritto da un’opportunamatrice simmetrica De e l’assenza di tensioni e deformazioni iniziali, con laseguente:
σ = Deε (209)
Sostituendo ad ε l’espressione (208) si trova:
σ = DeBeu (210)
Con quanto trovato, ora possibile determinare tutte le grandezze richiesteper la scrittura dell’equazione dinamica (??) per un modello ad elementi finiti:

1. Matrice di rigidezzaIl calcolo per determinare il valore degli elementi della matrice di rigidezzadell’elemento Ke si basa sull’idea che alla deformazione di un corpo possi-bile associare una funzione energia potenziale U che si pu esprimere nellaforma:
U =1
2
∫V
εTσdV (211)
dove V il volume dell’elemento. Per le (210) e (208) la (211) si pu riscri-vere:
U =1
2
∫V
(Beun)TDBeundV =
=1
2uTn
∫V
BeTDBedV un
(212)
che si pu scrivere:
U =1
2uTnKeun (213)
dove
Ke =
∫V
BeTDBedV (214)
la matrice di rigidezza dell’elemento. La Ke simmetrica perch, essendosimmetrica D sar simmetrica anche la matrice prodotto (Be)TDBe. Lamatrice di rigidezza globale K si ottiene semplicemente scrivendo per ogninodo i contributi degli elementi ad esso afferenti.
2. Matrice di massaIl calcolo della matrice di Massa si basa, invece, sulla formulazione dell’energiacinetica che, per un elemento, si pu scrivere:
T =1
2
∫V
ρuT udV (215)
dove ρ la densit dell’elemento e u la derivata rispetto al tempo delvettore spostamento u. Per la (204) e, ricordando che Ne indipendentedal tempo, si trova che:
u = Neun (216)
sostituendo nella (215) si ottiene:
T =1
2
∫V
ρ(Neun)TNeundV
=1
2uTn
∫V
ρNeTNedV un
(217)
che si pu scrivere:
T =1
2uTnMeun (218)

dove
Me =
∫V
ρNeTNedV (219)
la matrice di massa dell’elemento. In questa formulazione la matrice dettamatrice di massa coerente se per calcolarla si utilizza la stessa matricedelle funzioni di formaNe usata per determinare la matrice di rigidezzaKe.Come per la matrice di rigidezza, la matrice di massa globale M siottiene tenendo conto dei contributi dati ad ogni nodo dagli elementi adesso collegati.
Spesso, per ridurre la quantit di calcoli necessari, alla matrice di massacoerente viene sostituita una matrice di massa diagonale detta concentratacon elementi calcolati come:
meii =
1
3ρV e (220)
dove ρ e V e sono rispettivamente la densit ed il volume dell’elemento.
3. La matrice di smorzamentoPer il calcolo della matrice di massa e della matrice di rigidezza neces-saria la conoscenza rispettivamente della densit ρ e del legame costitu-tivo D, grandezze facilmente misurabili attraverso prove statiche. Questonon possibile per il coefficiente di smorzamento, per questo non esisteuna forma che la definisca univocamente8. Nel caso venga utilizzata unamatrice di massa concentrata, gli elementi della matrice di smorzamentovengono abitualmente espressi come:
deii = αmeii (221)
con α che rappresenta un opportuno coefficiente di scala. Molto similealla formulazione espressa dalla (221) l’espressione della molto nota efrequentemente utilizzata matrice di smorzamento di Rayleigh definita da:
Ce = αMe + βKe (222)
dove α e β sono quantit scalari che variano a seconda del materiale.
4. Il vettore delle forze applicateLa scrittura del vettore delle forze applicate non presenta particolari prob-lemi, infatti, se esse sono applicate direttamente sui nodi, sono gi espressenella forma richiesta. Nel caso invece siano presenti forze di massa, forzedistribuite sulla superficie o su di una linea o anche tensioni o deformazioniiniziali necessario ricavare un sistema di forze nodali equivalenti, che siottengono facendo tramite lo studio dell’equilibrio dell’elemento. Se per
8Un interessante lavoro sulle tante diverse espressioni usate per definire il termine dissipa-tivo stato fatto da Pilkey in Pilkey (1998).

esempio su di un elemento agissero solo le forze di massa che si vuole ri-portare ad un sistema equivalente, per mantenere l’elemento in equilibriocon gli spostamenti nodali nulli, sarebbe necessario applicare ai nodi delleforze: queste sono le forze equivalenti ricercate espresse dalla:
Feq =
∫V
NeTQdV (223)
dove Q sono le forze di massa e Feq il vettore delle forze nodali equivalenti.

References
Carmignani, C. (1990). Introduzione al metodo degli elementi finiti. Universitdegli studi di Pisa, Facolt di Ingegneria.
Ciarlet, P. (1988). Mathematical Elasticity: Three-Dimensional Elasticity, vol-ume I. North Holland.
D’Aulignac, D., Laugier, C., and Cavusoglu, M. C. (1999). Towards a real-istic ecographic simulator with force feedback. In Proceedings of the 1999IEEE/RSJ International Conference on Intelligent Robots and Systems, pages727–732.
De, S. and K.J., B. (2000). The method of finite spheres. Computational Me-chanics, 25:329–345.
G.V. Vinogradov, A. Y. M. (1977). Rheology of Polymers. MIR PublishersMoscow.
Kim, J., De, S., and Srinivasan, M. A. (2003). Physically based hybrid approachin real time surgical simulation with force feedback. In Westwood, J., editor,Medicine Meets Virtual Reality 11, pages 158–164. IOS Press.
Lurie, A. (1990). Nonlinear Theory of Elasticity. North Holland.
Novozhilov, V. (1910). Foundations of the Nonlinear Theory of Elasticity. DoverPublications Inc.
Ogden, R. (1997). Non-linear elastic deformations. Dover Publications Inc.
Pilkey, D. F. (1998). Computation of a Damping Matrix for Finite ElementModel Updating. PhD thesis, Virginia Polytechnic Institute and State Uni-versity.
Waters, K. and Terzopoulos, D. (1990). A physical model of facial tissue andmuscle articulation. In Proc. First Conf. on Visualization in Biomedical Com-puting (VBC’90), pages 77–82.
Zhang, Y., Prakash, E. C., and Sung, E. (2003). Anatomically accurate indi-vidual face modeling. In Medicine Meets Virtual Reality 11, pages 407–409.IOS Press.
Zienkiewicz, O. and Taylor, R. (2000). The Finite Element Method, The Basis,volume 1. Butterworth-Heinemann.







![C5.2 Elasticity and Plasticity [1cm] Lecture 5 Plane strain](https://static.fdocument.org/doc/165x107/625d199f7a3aa731631d9e64/c52-elasticity-and-plasticity-1cm-lecture-5-plane-strain.jpg)