ING. PAVEL HOSPODÁŘ, [email protected] Czech technical university in Prague, Faculty of...
15
ING. PAVEL HOSPODÁŘ, [email protected] Czech technical university in Prague, Faculty of electrical engineering, Department of control engineering Control of Control of Lateral Lateral motion motion Flight management system 2009
-
Upload
gloria-hoover -
Category
Documents
-
view
214 -
download
0
Transcript of ING. PAVEL HOSPODÁŘ, [email protected] Czech technical university in Prague, Faculty of...
ING. PAVEL HOSPODÁŘ, [email protected]
Czech technical university in Prague, Faculty of electrical engineering,
Department of control engineering
Control of Control of Lateral Lateral motionmotion
Flight management system 2009
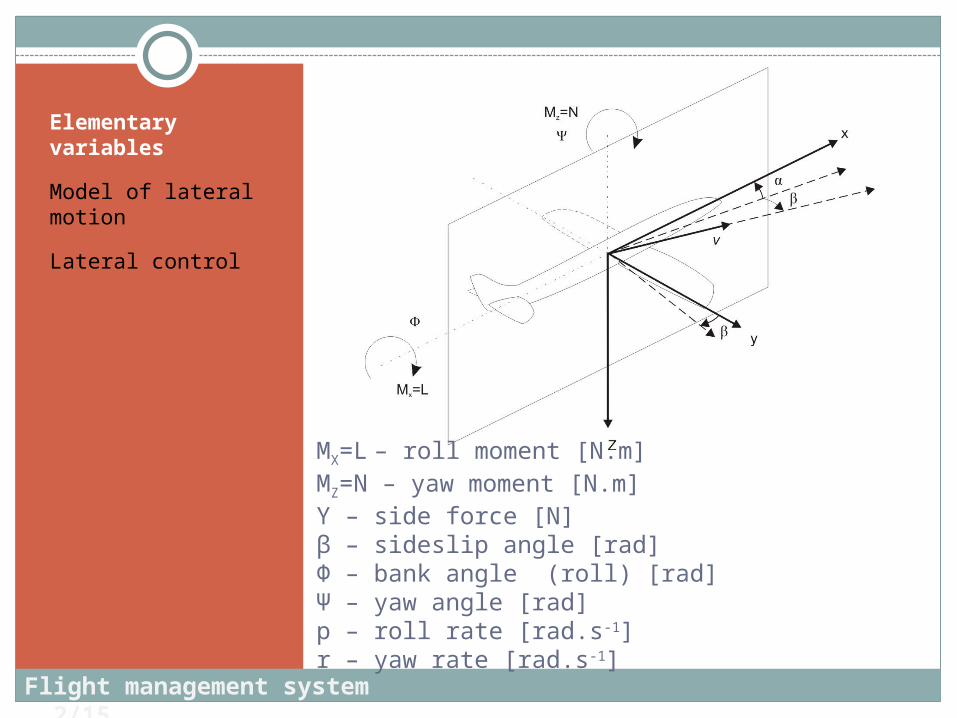
MX=L – roll moment [N.m]MZ=N – yaw moment [N.m] Y – side force [N] β – sideslip angle [rad] Φ – bank angle (roll) [rad] Ψ – yaw angle [rad] p – roll rate [rad.s-1]r – yaw rate [rad.s-1]
Elementary variables
Model of lateral motion
Lateral control
Flight management system 2/15
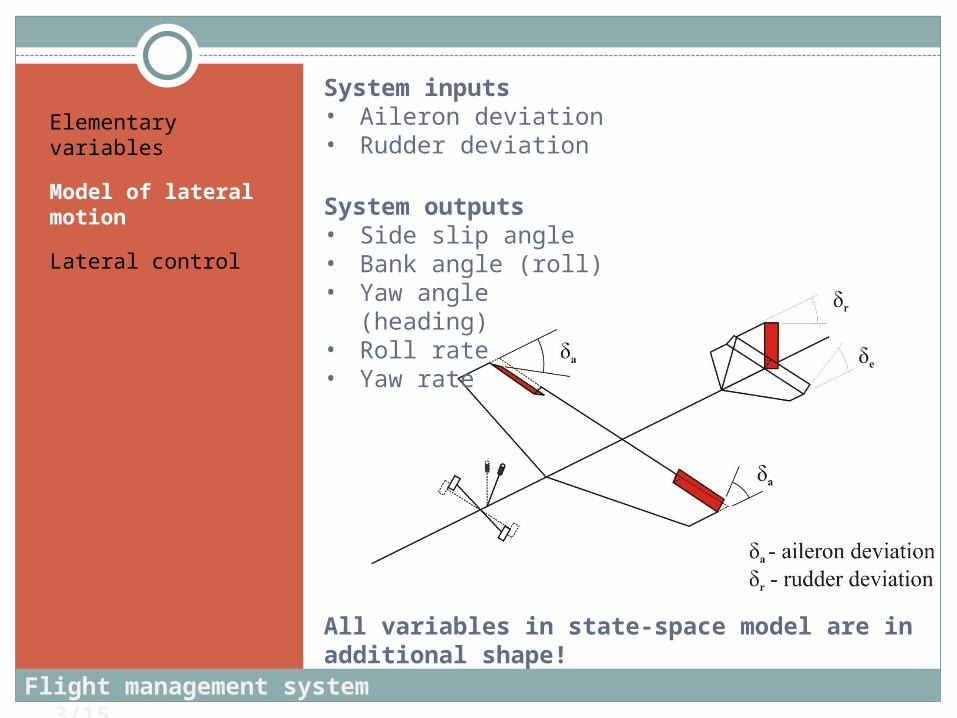
All variables in state-space model are in additional shape!
System inputs• Aileron deviation• Rudder deviation
System outputs • Side slip angle• Bank angle (roll)• Yaw angle
(heading)• Roll rate• Yaw rate
Flight management system 3/15
Elementary variables
Model of lateral motion
Lateral control
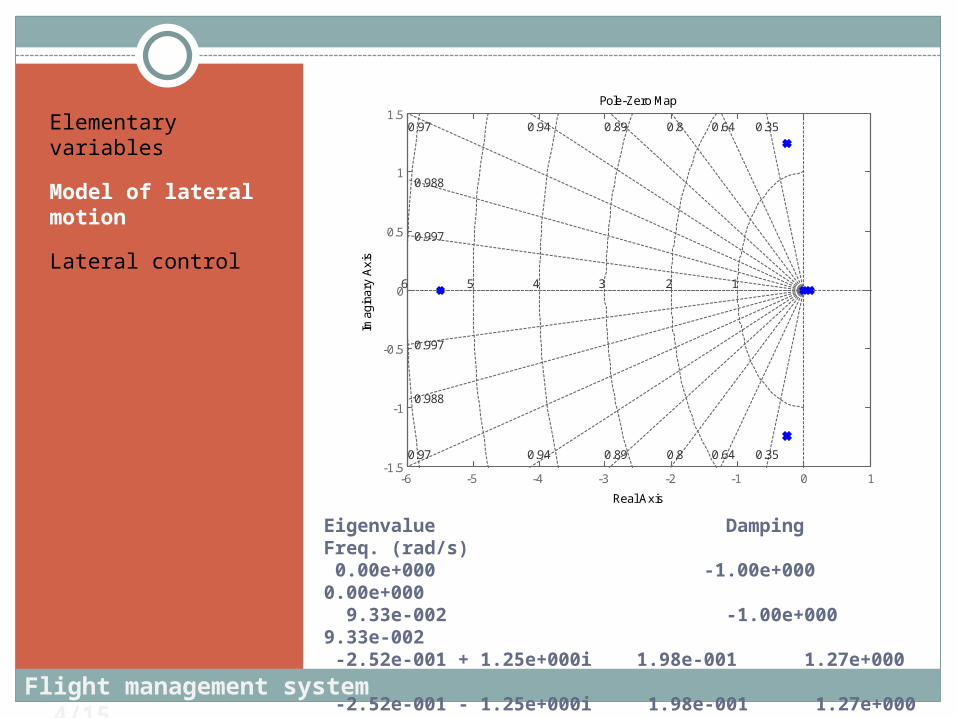
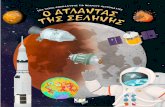
Eigenvalue Damping Freq. (rad/s) 0.00e+000 -1.00e+000 0.00e+000 9.33e-002 -1.00e+000 9.33e-002 -2.52e-001 + 1.25e+000i 1.98e-001 1.27e+000 -2.52e-001 - 1.25e+000i 1.98e-001 1.27e+000 -5.49e+000 1 .00e+000 5.49e+000
Elementary variables
Model of lateral motion
Lateral control
Pole-Zero Map
Real Axis
Imag
inar
y A
xis
-6 -5 -4 -3 -2 -1 0 1-1.5
-1
-0.5
0
0.5
1
1.50.350.640.80.890.940.97
0.988
0.997
0.350.640.80.890.940.97
0.988
0.997
123456
Flight management system 4/15
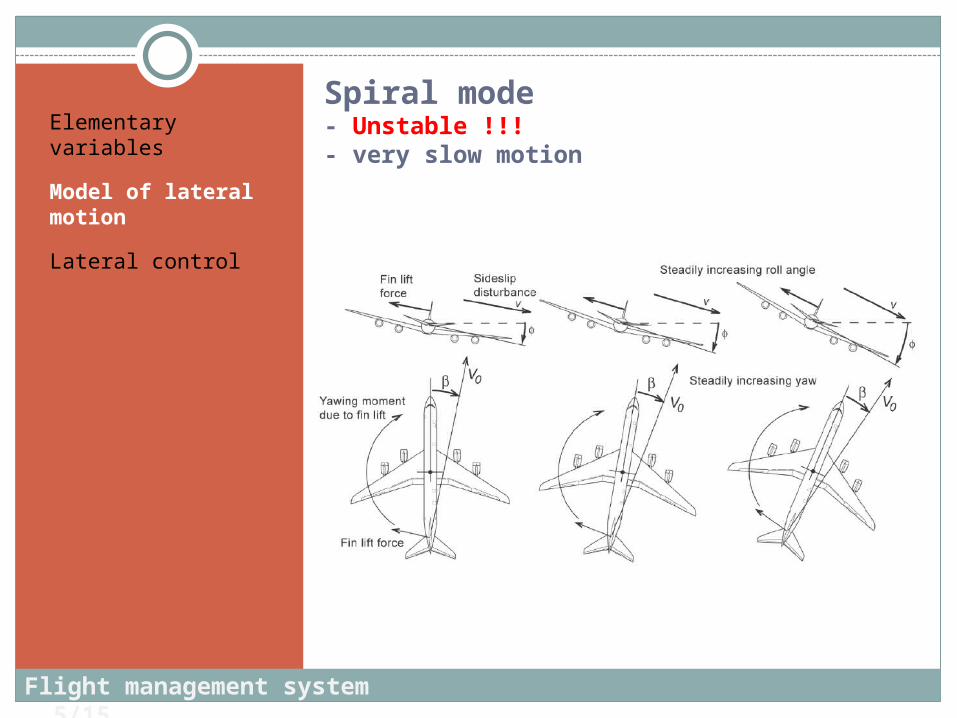
Spiral mode- Unstable !!!- very slow motion
Elementary variables
Model of lateral motion
Lateral control
Flight management system 5/15
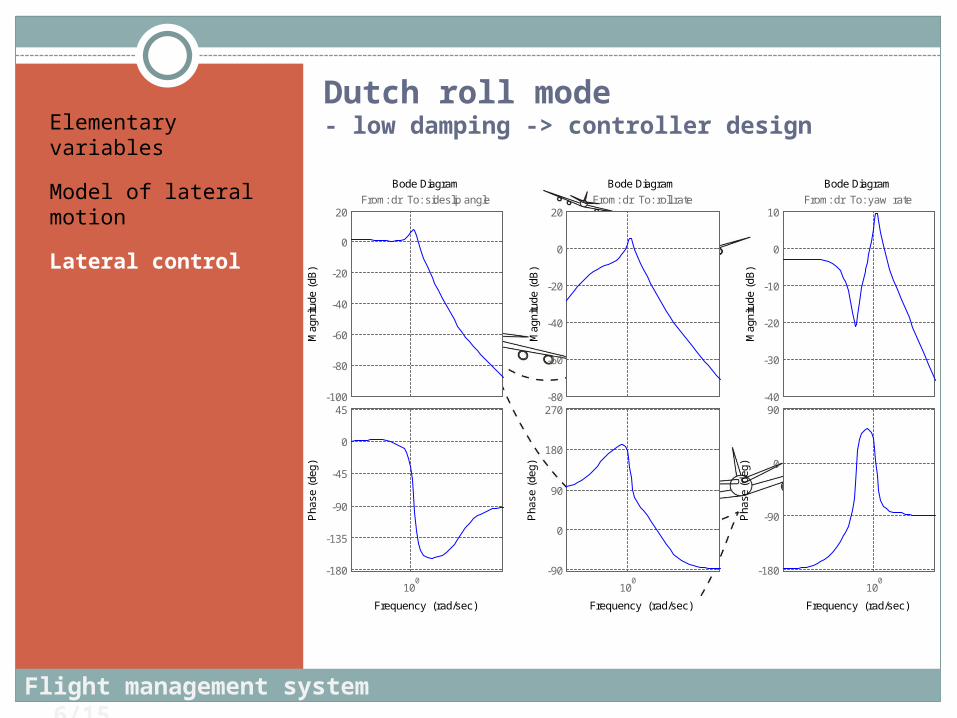
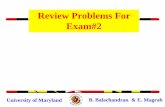
Dutch roll mode- low damping -> controller designElementary variables
Model of lateral motion
Lateral control
-100
-80
-60
-40
-20
0
20From: dr To: sideslip angle
Mag
nitu
de (
dB)
100
-180
-135
-90
-45
0
45
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
-80
-60
-40
-20
0
20From: dr To: roll rate
Mag
nitu
de (
dB)
100
-90
0
90
180
270
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
-40
-30
-20
-10
0
10From: dr To: yaw rate
Mag
nitu
de (
dB)
100
-180
-90
0
90
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
Flight management system 6/15

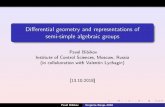
Yaw damper- high frequence dampingElementary variables
Model of lateral motion
Lateral control
Flight management system 7/15
Elementary variables
Model of lateral motion
Lateral control
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
3
From: dr To: yaw rate
Step Response
Time (sec)
Am
plitu
de
original
damper
damper & WO filter
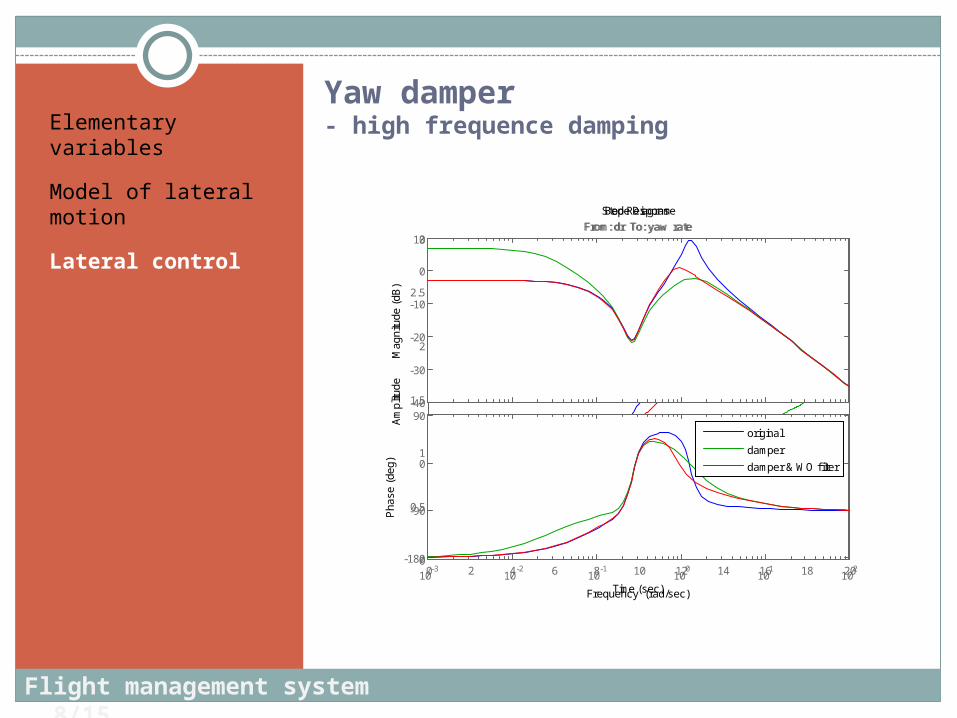
Yaw damper- high frequence damping
-40
-30
-20
-10
0
10From: dr To: yaw rate
Mag
nitu
de (
dB)
10-3
10-2
10-1
100
101
102
-180
-90
0
90
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
original
damper
damper & WO filter
Flight management system 8/15
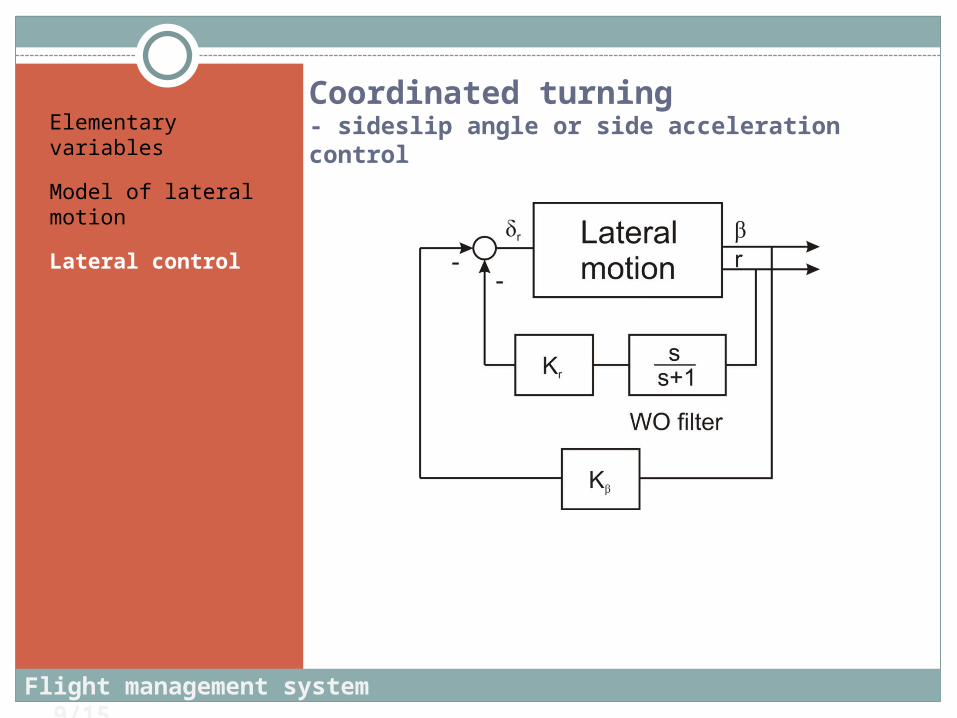
Coordinated turning - sideslip angle or side acceleration control Elementary variables
Model of lateral motion
Lateral control
Flight management system 9/15
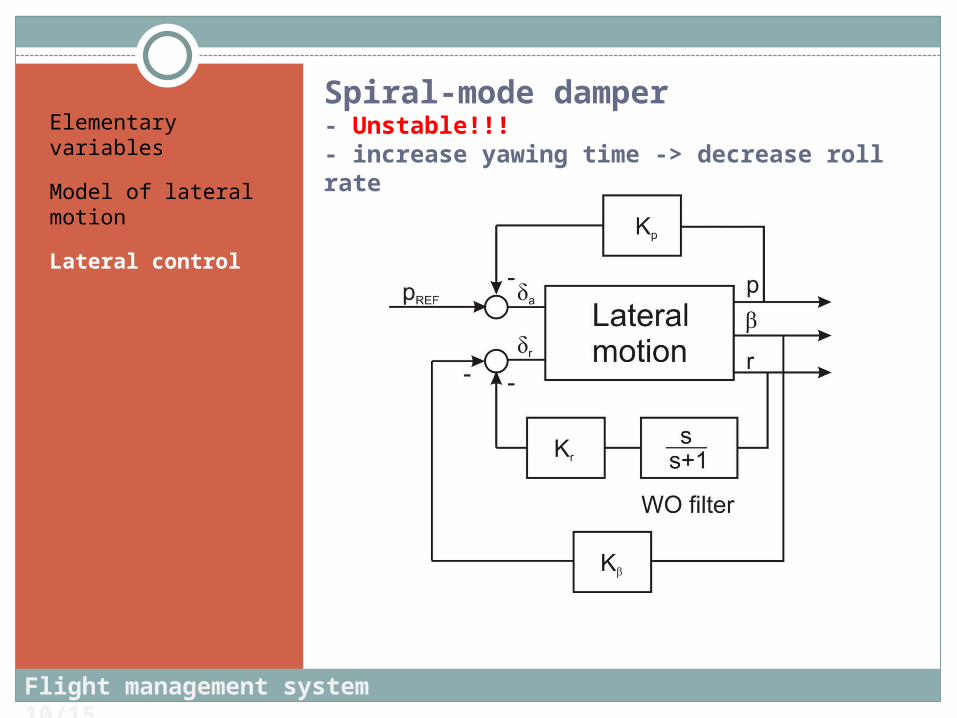
Spiral-mode damper- Unstable!!!- increase yawing time -> decrease roll rate
Elementary variables
Model of lateral motion
Lateral control
Flight management system 10/15
Elementary variables
Model of lateral motion
Lateral control
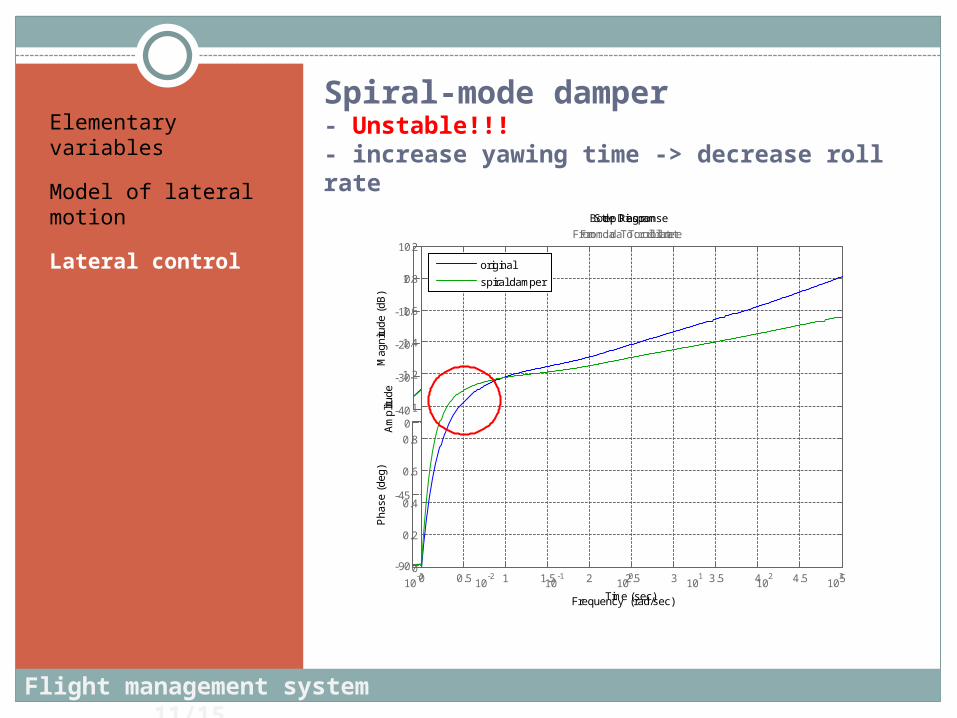
Spiral-mode damper- Unstable!!!- increase yawing time -> decrease roll rate
-40
-30
-20
-10
0
10From: da To: roll rate
Mag
nitu
de (
dB)
10-3
10-2
10-1
100
101
102
103
-90
-45
0
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
original
spiral damper
Flight management system 11/15
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
From: da To: roll rate
Step Response
Time (sec)
Am
plitu
de
original
spiral damper
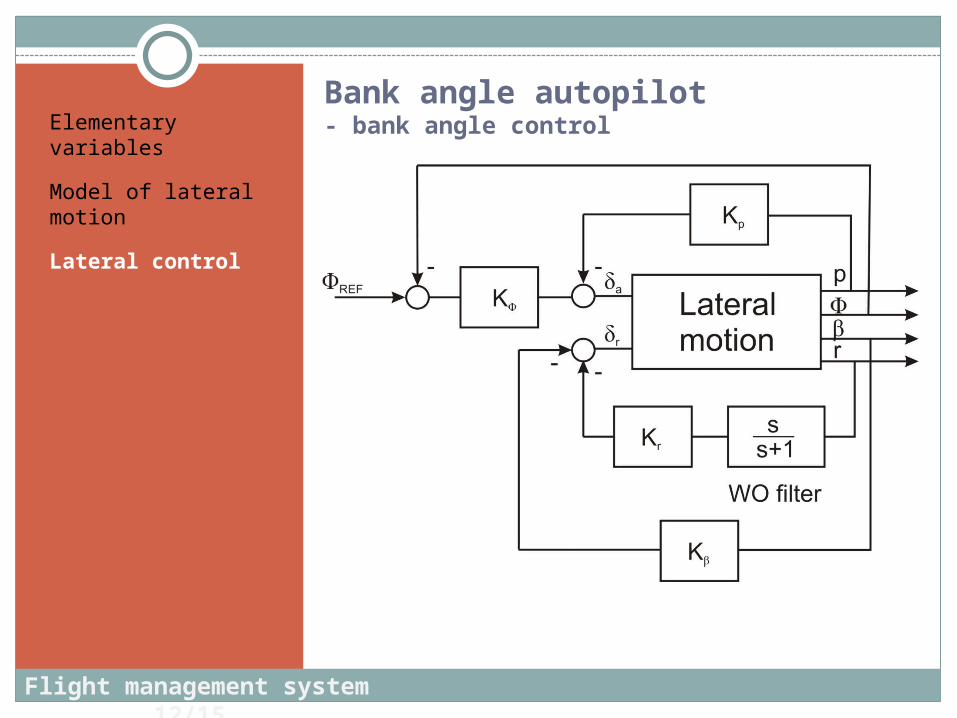
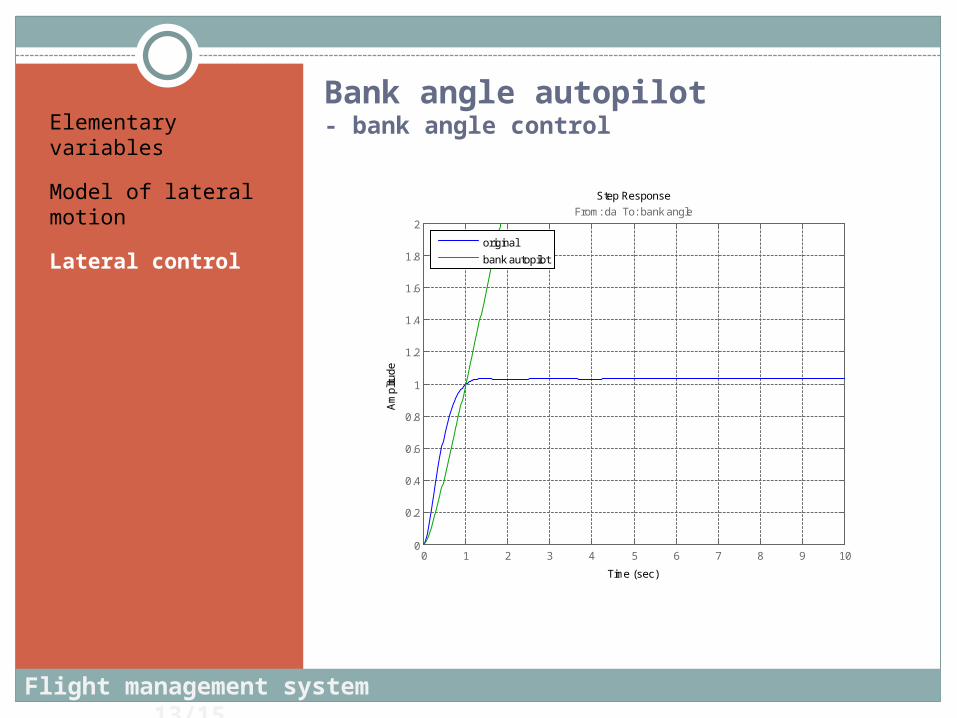
Bank angle autopilot- bank angle controlElementary variables
Model of lateral motion
Lateral control
Flight management system 12/15
Bank angle autopilot- bank angle controlElementary variables
Model of lateral motion
Lateral control
Flight management system 13/15
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
From: da To: bank angle
Step Response
Time (sec)
Am
plitu
de
original
bank autopilot
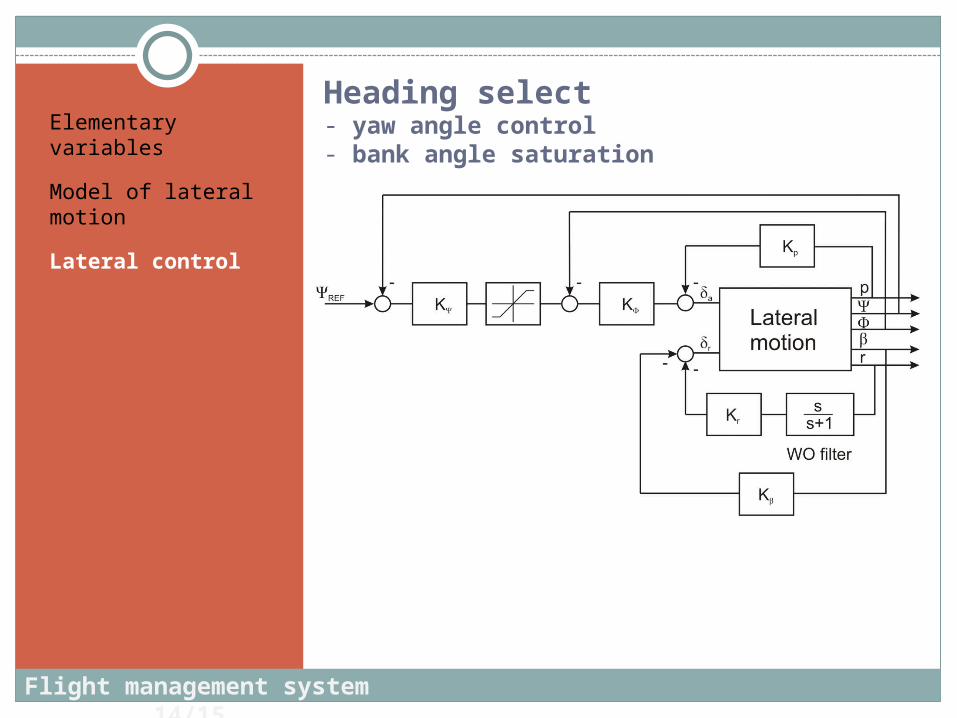
Elementary variables
Model of lateral motion
Lateral control
Heading select- yaw angle control- bank angle saturation
Flight management system 14/15
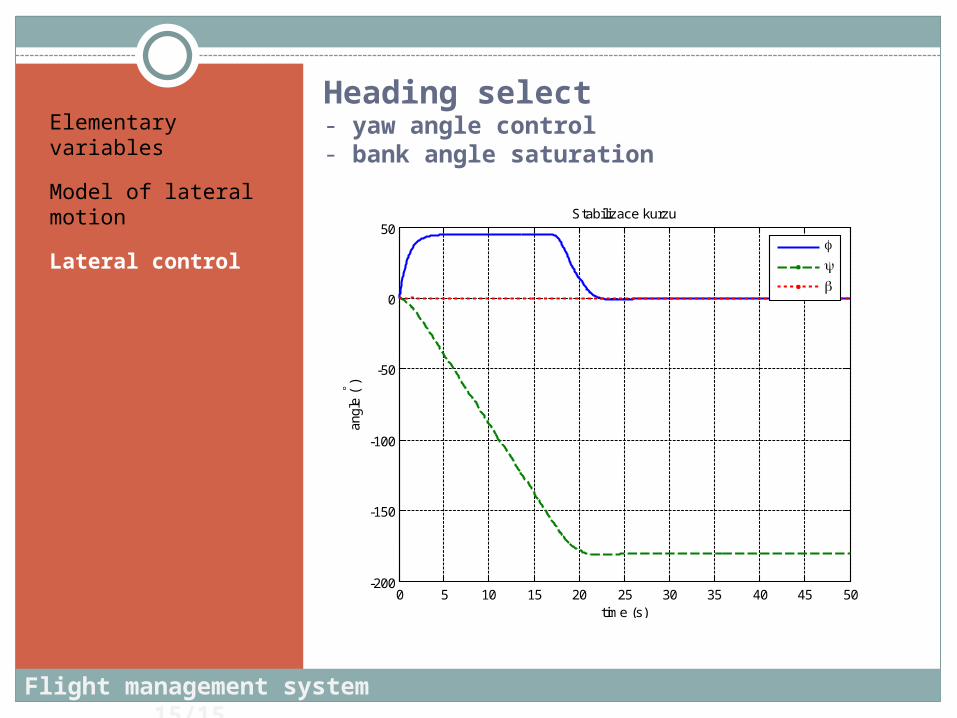
Elementary variables
Model of lateral motion
Lateral control
Heading select- yaw angle control- bank angle saturation
Flight management system 15/15
0 5 10 15 20 25 30 35 40 45 50-200
-150
-100
-50
0
50
time (s)
angl
e (
)
Stabilizace kurzu