Inferencia difusa
19
Inferencia difusa Laura Ivoone Garay Jiménez UPIITA-IPN
-
Upload
jorge-cristhian-chamby-diaz -
Category
Documents
-
view
99 -
download
7
Transcript of Inferencia difusa
Inferencia difusa
Laura Ivoone Garay JiménezUPIITA-IPN
Contenido
Razonamiento difuso.Sistemas de inferencia difusa
Modelo de MamdaniModelo de SugenoModelo de Tsukamoto
Razonamiento Difuso
El razonamiento difuso esta asociado a la composición difusa.
donde a es un intervalo de μA (x) b es un intervalo de μB (y)
La regla básica de inferencia es el modus ponens, donde podemos inferir la verdad de B a traves de la verdad de A.
B= A°R
Modus PonensPremisa 1 (hecho) x es APremisa 2 (regla) si x es A entonces y es B,Consecuencia (conclusión) y es B
Los humanos inferimos:Premisa 1 (hecho) x es A’Premisa 2 (regla) si x es A entonces y es B,Consecuencia (conclusión) y es B’Donde A’ es algo de forma aproximada.
A esto se le llama razonamiento difuso, razón aproximada o modus ponens generalizado (GMP)
Razonamiento difuso
Sean A, A’ y B conjuntos de X, X y Y.Asumimos A→B=R en X x Y.
μB’ (y)=maxx min[μ A’ (x),μR (x,y)]
OB’=A’ ° R= A’(A→B)
Sistema de Inferencia de Mandani
El más común, con composición max-min, propuesta por mandani.
Si tenemos un solo antecedente y una regla.B’=A’ ° R= A’(A→B)
Y asumimos la definición de Mandani para la relación A→B.
μB’ (y)=∨x [μ
A’ (x)∧μ
A (x)]∧μB (y)μB’ (y)=w∧μB (y)
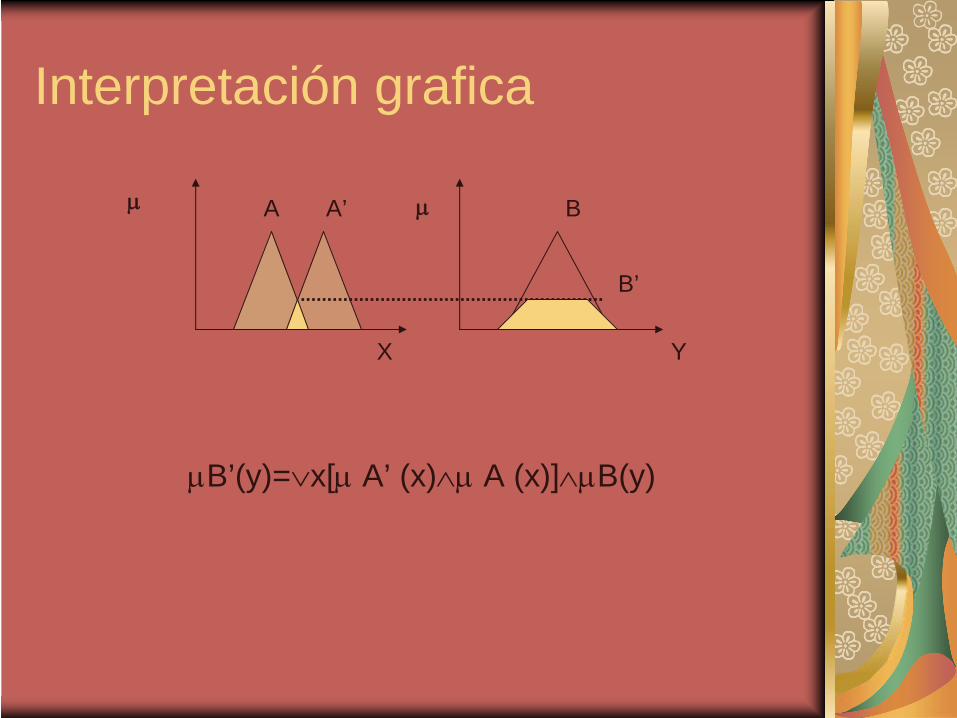
Interpretación grafica
A A’ B
B’
YX
μ μ
μB’(y)=∨x[μ
A’ (x)∧μ
A (x)]∧μB(y)
Una regla y antecedentes multiples.
Premisa 1 (hecho) x es A’ y y es B’Premisa 2 (regla) si x es A y y es B entonces z es CConsecuencia (conclusión) z es C’
Si “x es A y y es B” puede ser A x B
Entonces la implicación difusa queda como:A x B → C ó
(A x B) x C= ∫AxBxC μA (x)∧ μB (x) μC (x) / (x,y,z)
Entonces C’=(A’xB’)°(AxB→C)
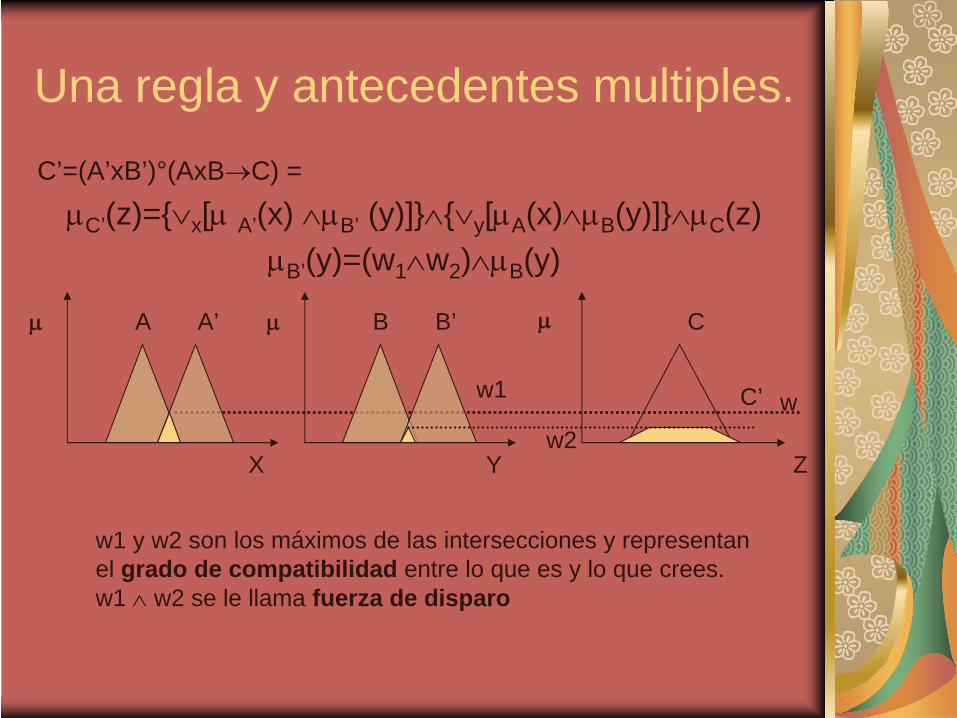
Una regla y antecedentes multiples.C’=(A’xB’)°(AxB→C) =
μC’ (z)={∨x [μ
A’ (x) ∧μB’ (y)]}∧{∨y [μA (x)∧μB (y)]}∧μC (z)μB’ (y)=(w1 ∧w2 )∧μB (y)
A A’
X
μ C
C’
Z
μB B’
Y
μ
w1
w2w
w1 y w2 son los máximos de las intersecciones y representan el grado de compatibilidad entre lo que es y lo que crees.w1 ∧
w2 se le llama fuerza de disparo
Multiples reglas, multiples antecedentes.Premisa 1 (hecho) x es A’ y y es B’Premisa 2 (regla 1) si x es A1 y y es B1 entonces z es C1Premisa 3 (regla 2) si x es A2 y y es B2 entonces z es C2Consecuencia (conclusión) z es C’=C1’ o C2’
Si representamos cada regla en un espacio entonces R1=A1 x B1 y R2= A2 x B2
C1’=(A’x B’)°(R1) y C2’=(A’x B’)°(R2)Por lo tantoC’=(A’x B’)°(R1U R2) = C1’ U C2’
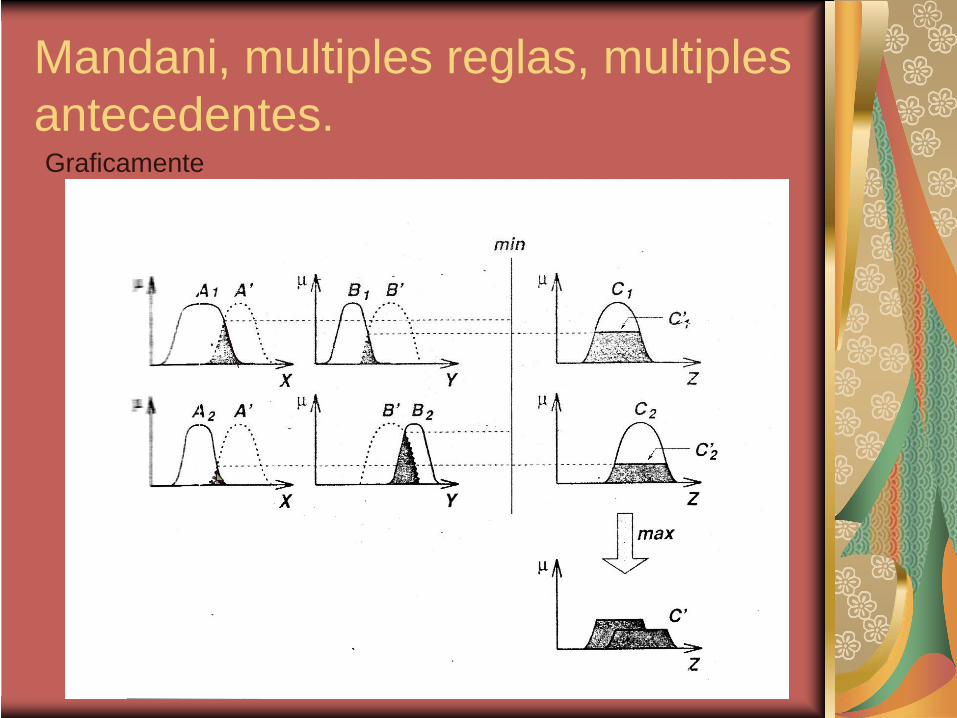
Mandani, multiples reglas, multiples antecedentes.Graficamente
Propongamos un sistema difuso de inferencia…..Teoría de conjuntos difusosReglas difusasRazonamiento difuso
¡Ya tenemos todo para generarlo!
Estructura de un sistema de inferencia difuso.
Ver diapositiva de Yesenia, Sistemas Neurodifusos (1-5).
1. Base de reglas (reglas difusas)
2. Diccionario, Una base de datos de las funciones de membresía.
3. Mecanismo de razonamiento
Sistemas de inferencia difusa.
El sistema de inferencia difusa, puede tomar valores certeros o difusos, considerando a los valores certeros como singlentons (impulsos).Salidas son variables difusasPara control, se requieren valores certeros entonces tenemos que defusificar.
Sistema de inferencia de Mandani
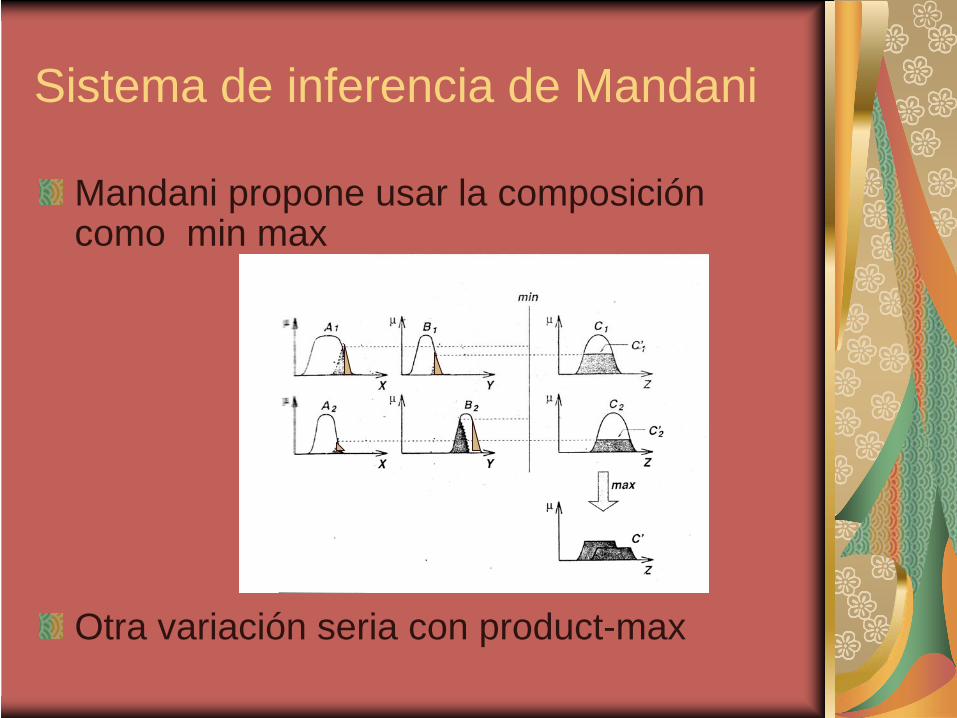
Mandani propone usar la composición como min max
Otra variación seria con product-max
Y ¿¿¿si queremos un valor certero para controlar la siguiente etapa???
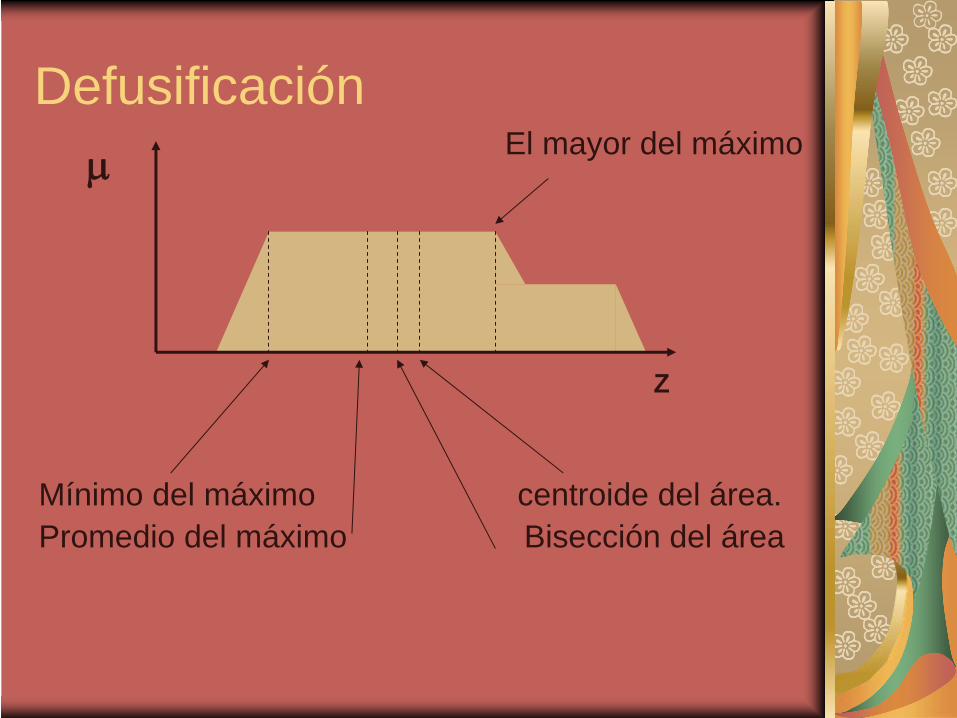
Defusificación
Mínimo del máximo centroide del área.Promedio del máximo Bisección del área
μ
Z
El mayor del máximo
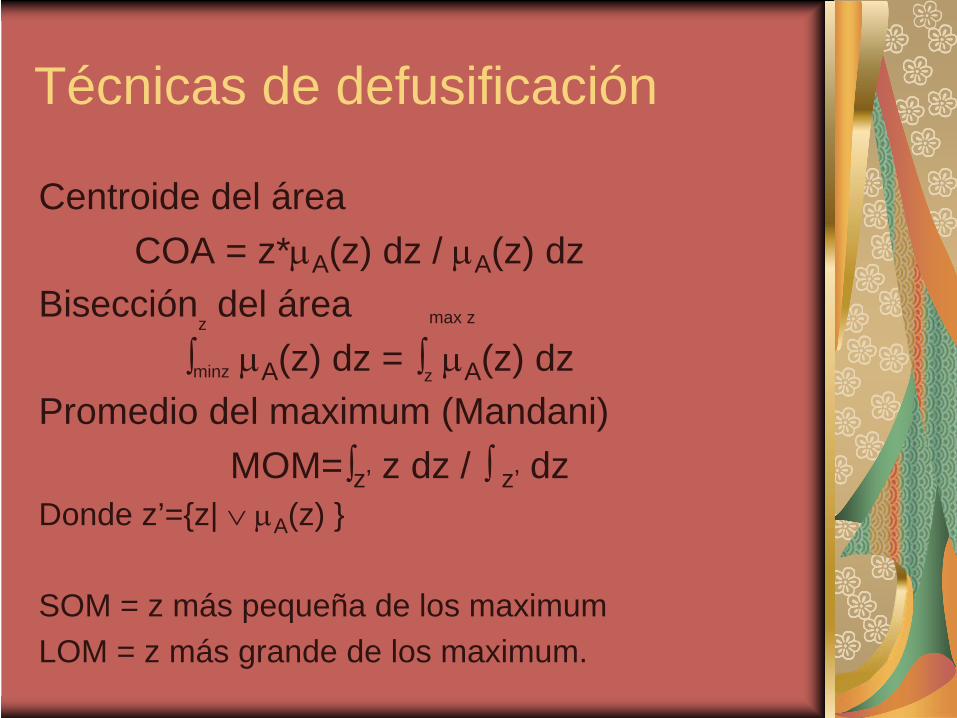
Técnicas de defusificación
Centroide del áreaCOA = z*μA (z) dz / μA (z) dz
Bisecciónz del área max z
∫minz μA (z) dz = ∫z μA (z) dzPromedio del maximum (Mandani)
MOM=∫z’ z dz / ∫
z’ dzDonde z’={z| ∨ μA (z) }
SOM = z más pequeña de los maximumLOM = z más grande de los maximum.
Ejemplo:Generador - Veleta