Il Controllo Della Macchina a Induzione
25
Il controllo della Macchina a Induzione (Motore Asincrono) Azionamenti Elettrici per l’industria e i trasporti Prof. F. L. Mapelli
-
Upload
luigirossi11 -
Category
Documents
-
view
35 -
download
0
Transcript of Il Controllo Della Macchina a Induzione
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 1/25
Il controllo dellaMacchina a Induzione
(Motore Asincrono)Azionamenti Elettrici per
l’industria e i trasporti
Prof. F. L. Mapelli
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 2/25
2
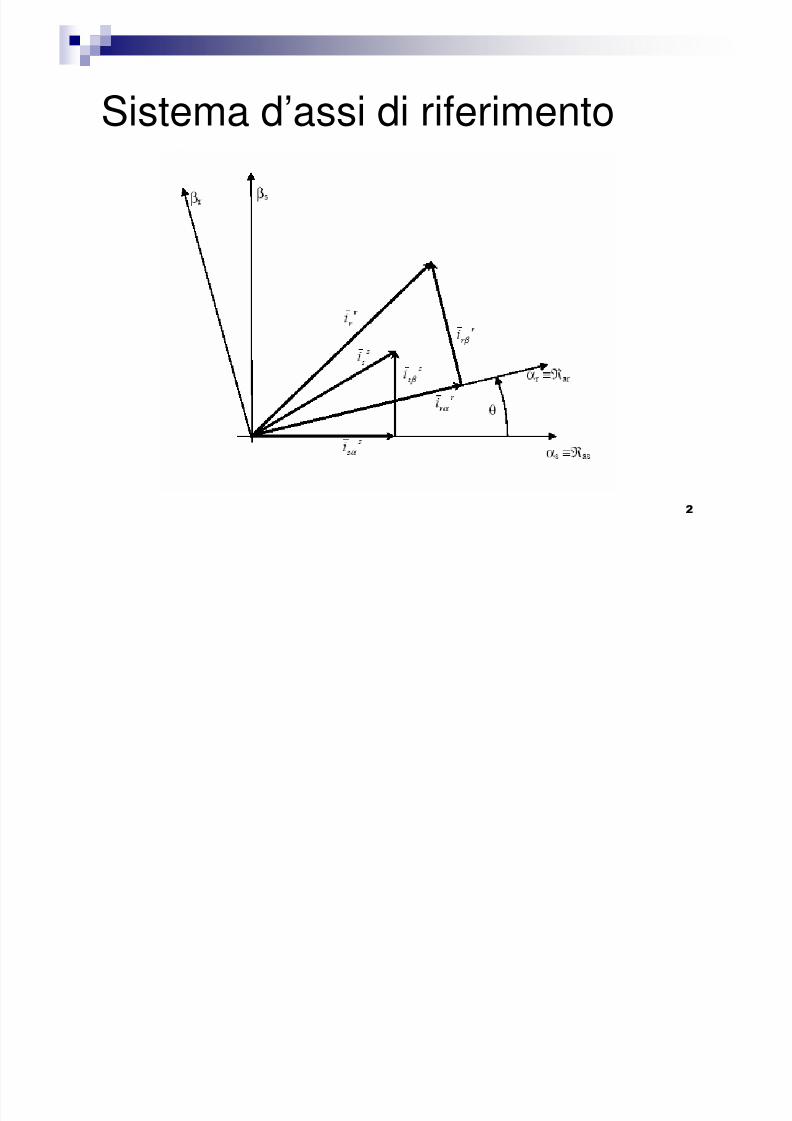
Sistema d’assi di riferimento

5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 3/25
3
Correnti di fase e fasori i s e i r
2 3 j / a e
π =

5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 4/25
4
Flusso statorico concatenato totale

5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 5/25
5
Flusso rotorico concatenato totale
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 6/25
6
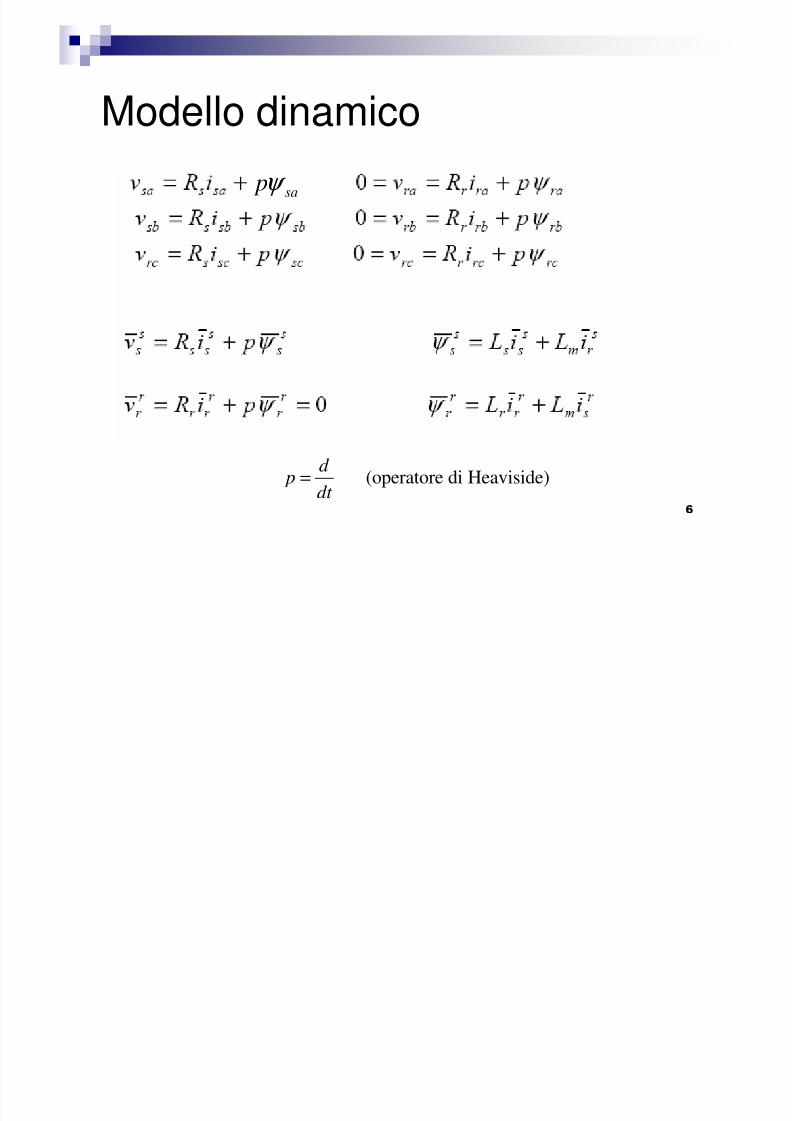
Modello dinamico
sa pψ
(operatore di Heaviside)d
pdt
=
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 7/25
7
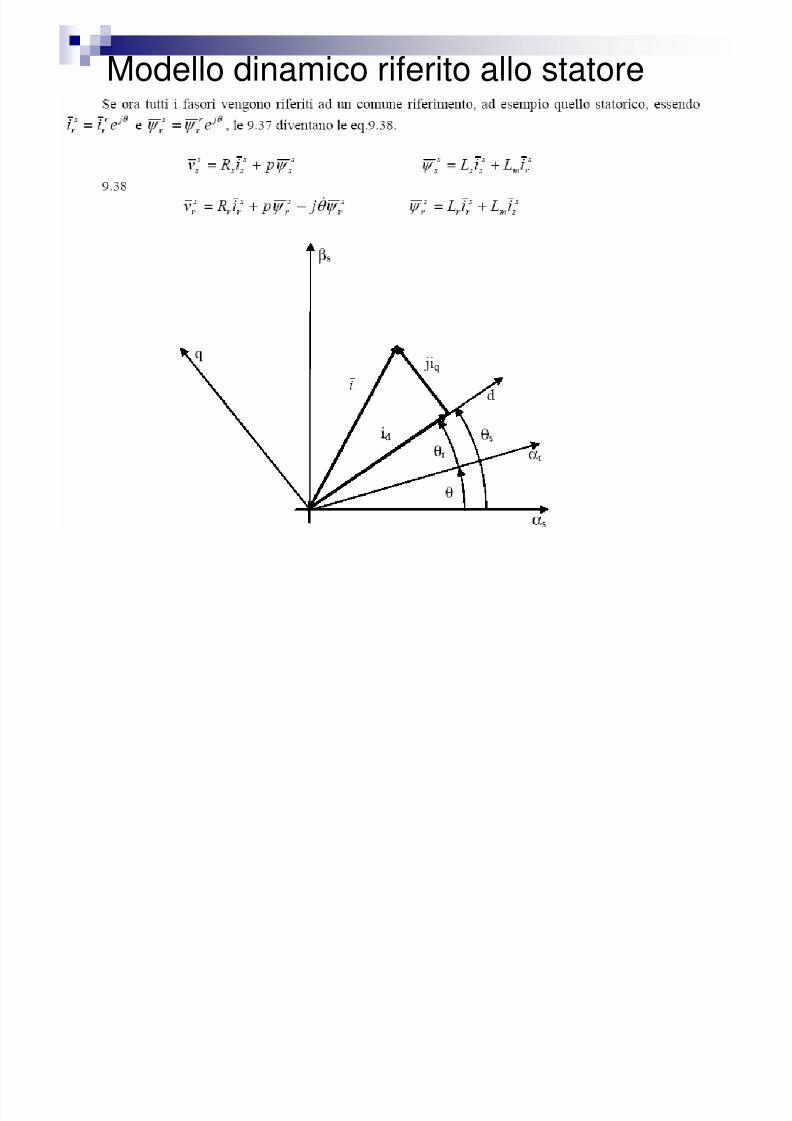
Modello dinamico riferito allo statore

5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 8/25
8
Modello riferito ad assi rotanti
s s ss j j js sr r s s r r e e i i e
θ θ θ ψ ψ ψ ψ = ⋅ = ⋅ = ⋅
0
che diventano
0
s s s
s s s s
s s s s
s s s s
j j j
s s s s
j j j j
r r r r r r
j j j j
s s s s s s
j j j j
r r r s r r
v e R i e p( e )
v e R i e j e p( e )
v e R i e p e j e
R i e j e j e p e
θ θ θ
θ θ θ θ
θ θ θ θ
θ θ θ θ
ψ
θ ψ ψ
ψ θ ψ
θψ θ ψ ψ
⋅ = ⋅ + ⋅
⋅ = ⋅ − ⋅ + ⋅ =
⋅ = ⋅ + ⋅ + ⋅
= ⋅ − ⋅ + ⋅ + ⋅
ɺ
ɺ
ɺ ɺ
Sostituendo i fasori espressi secondo le eq. a) e b)
poichè
r sθ θ θ = −ɺ ɺ ɺ
a)
b)
s
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 9/25
9
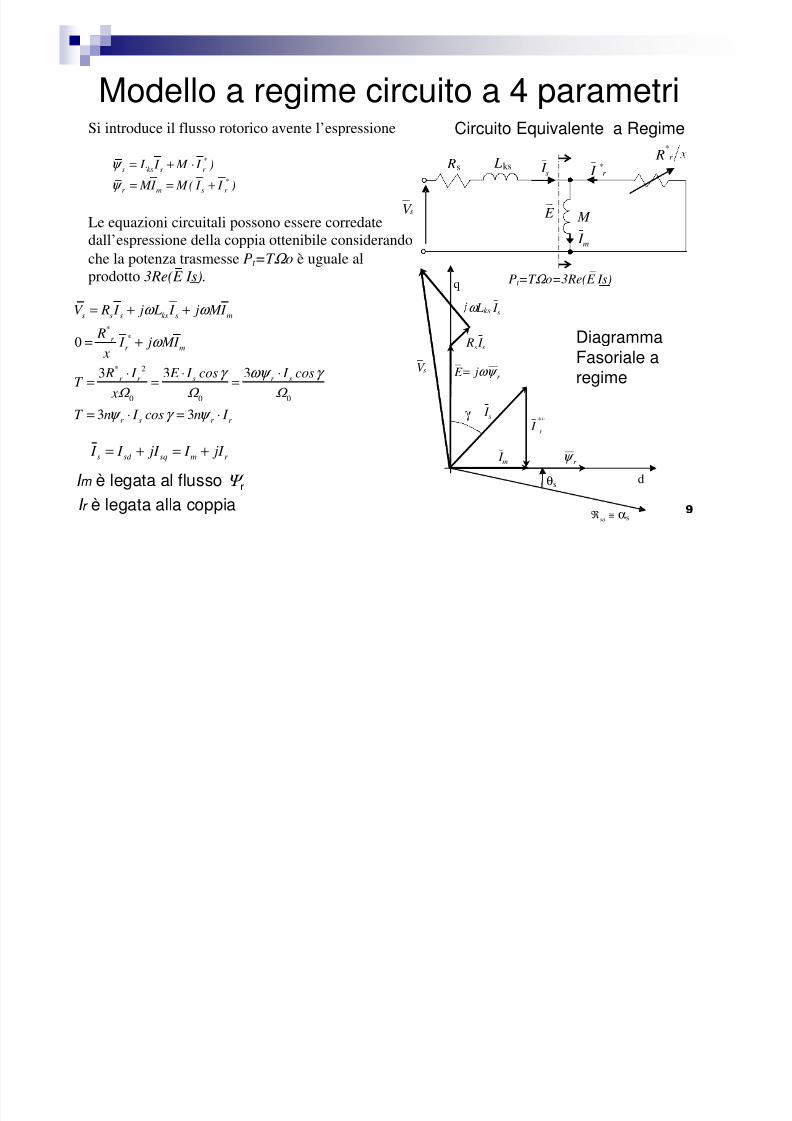
Modello a regime circuito a 4 parametriSi introduce il flusso rotorico avente l’espressione
*
s ks s r L I M I )ψ = + ⋅ *
r m s r MI M ( I I )ψ = = +
Le equazioni circuitali possono essere corredate
dall’espressione della coppia ottenibile considerando
che la potenza trasmesse Pt =T Ω o è uguale al
prodotto 3Re(E Is).
2
0 0 0
0
3 33
3 3
s s s ks s m
**r r m
*
s r sr r
r s r r
V R I j L I j MI
R I j MI
x
E I cos I cos R I T
x
T n I cos n I
ω ω
ω
γ ωψ γ
Ω Ω Ω
ψ γ ψ
= + +
= +
⋅ ⋅⋅= = =
= ⋅ = ⋅
r msqsd s jI I jI I I +=+=
s V
s I
M
m I
r I * R r
*
Rs Lks
E
Pt =T Ω o=3Re(E Is)
Circuito Equivalente a Regime
Diagramma
Fasoriale aregime
d
q
α s
θ s
m I
r I **
s I
E
s s I R
s I ω Lks
s V
r ψ
r j ψ ω =
≡ℜsa
I m è legata al flusso Ψ r
I r è legata alla coppia

5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 10/25
10
Macchina asincrona: Modello dinamico 4 parametri
0s s s s ks s s r ks s r
* *
r r r r r
s
v R i j L i j L pi p
R i j p
T Tc Jp / n;
T n r i cos
θ θ ψ ψ
θ ψ ψ
θ
Ψ γ
= + + + +
= + +
− =
= ⋅
ɺ ɺ
ɺ
ɺ
s
Sostituendo ai flussi le espressioni secondo il circuito a 4 parametri:*
s ks s r L i M iψ = + ⋅ *
r m s r
i M( i i )ψ = = +
E considerando i nuovi parametri elettrici Rr * , Lks, M e le correnti
definite come e ( = )* *
m r s m r i i i i i+

5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 11/25
11
• Le equazioni di prima non sono in forma canonica in quanto nell’equazion
di statore appaiono due derivate.
• Per ottenere la forma canonica si esprimere tutto in funzione della sol
corrente is e del flusso Ψ r considerando che *r s r ( i i )ψ = +
s ks s r L iψ ψ = + .
• Si sceglie come sistema di riferimento l’asse d reale sincrono con il fluss
r r ( )ψ ψ = e si evidenziano le componenti dei fasori ottenendo
Macchina asincrona:
Modello dinamico in forma canonica
Si eliminano per semplicità anche gli *

5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 12/25
12
Modello nelle componenti
** r
sd s r sd ks sd s ks sq r
Rv ( R R )i L p i L iθ ψ = + + − −ɺ
*
sq s r sq ks sq s ks sd r v ( R R )i L p i L iθ θ ψ = + + + +ɺ ɺ
0* r r sd r
R ( i ) p M
ψ ψ = − +
0 *
r sq r r R i θ ψ = − + ɺ
n JpT T c
θ ɺ=−
sqr inT ψ =
Considerando che e ches sd sqi i j i= + ⋅ r r ψ ψ =
Si ottengono le equazioni nelle componenti
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 13/25
13
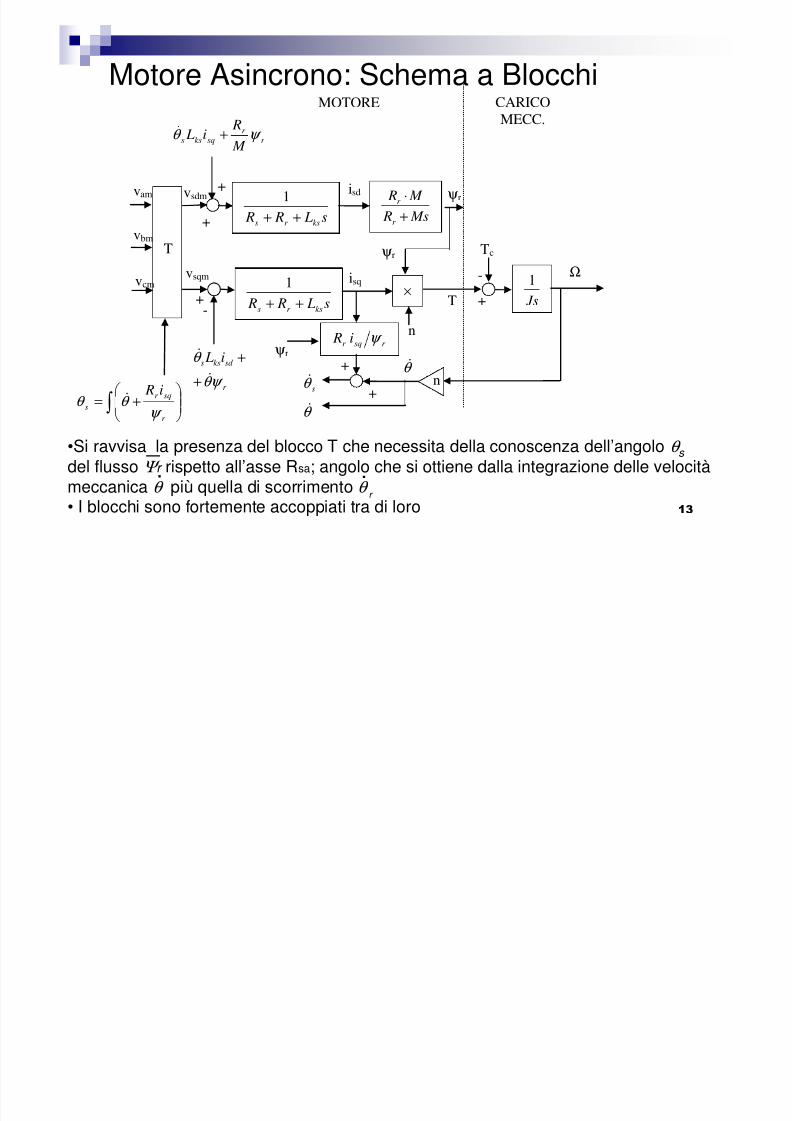
Motore Asincrono: Schema a Blocchi
•Si ravvisa la presenza del blocco T che necessita della conoscenza dell’angolo θ s
del flusso Ψ r rispetto all’asse Rsa; angolo che si ottiene dalla integrazione delle velocità
meccanica θ più quella di scorrimento θ • I blocchi sono fortemente accoppiati tra di loro
s L R R ksr s ++
1
+-
Js
1
-
+T
Tc
θ ɺ
MOTORE
×
r sqr i R ψ ψ r
isq
+
+
s L R R ksr s ++1 vsdm
vsqm
T
isd vam
vbm
vcm
CARICOMECC.
n
Ω
nθ ɺ
r
r
sqkss M
Ri L ψ θ +ɺ
r
sd kss i L
ψ θ
θ
ɺ
ɺ
+
+
Ms R M R
r
r
+⋅ ψ r
ψ r
+
+
sθ ɺ
∫
+=
r
sqr
si R
ψ θ θ ɺ
r
. .
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 14/25
14
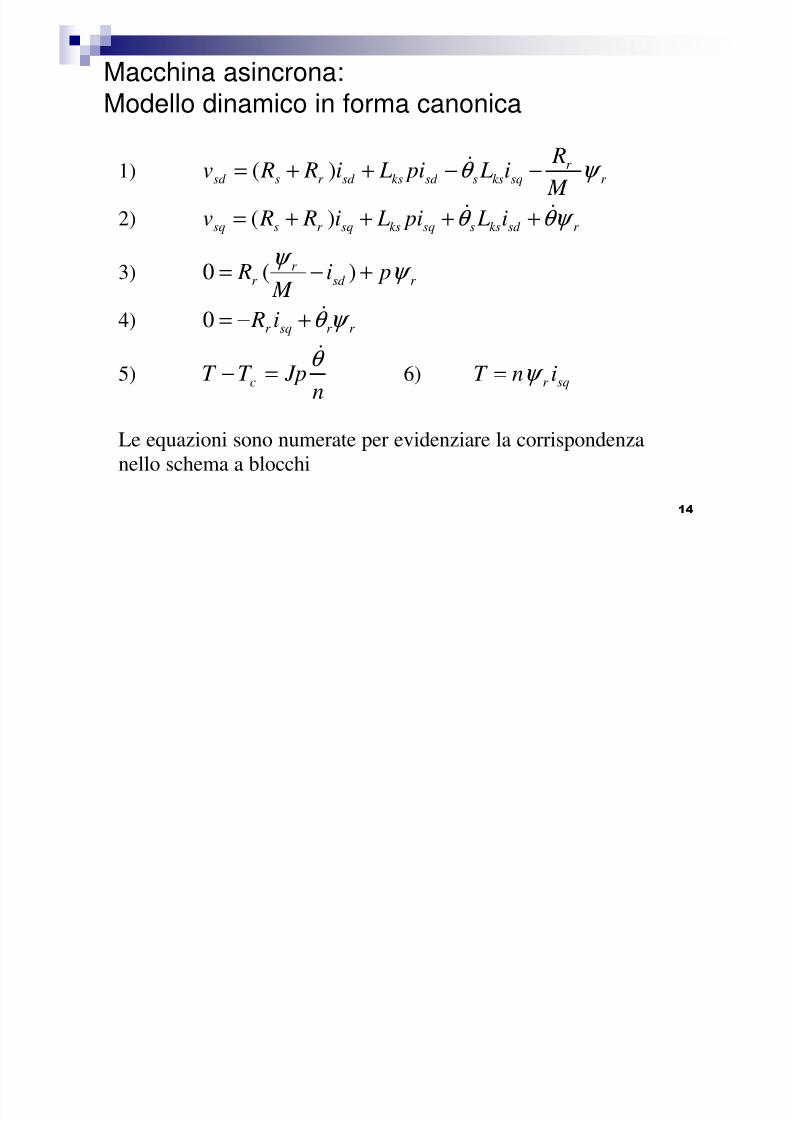
1) r r
sqksssd kssd r ssd
Ri L pi Li R Rv ψ θ −−++= ɺ)(
2) r sd ksssqkssqr ssq i L pi Li R Rv ψ θ θ ɺɺ ++++= )(
3) r sd r
r pi R ψ ψ
+−= )(0
4) r r sqr i R ψ θ ɺ+−=0
5)
n
JpT T c
θ ɺ
=− 6) sqr inT ψ =
Le equazioni sono numerate per evidenziare la corrispondenza
nello schema a blocchi
Macchina asincrona:
Modello dinamico in forma canonica
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 15/25
15
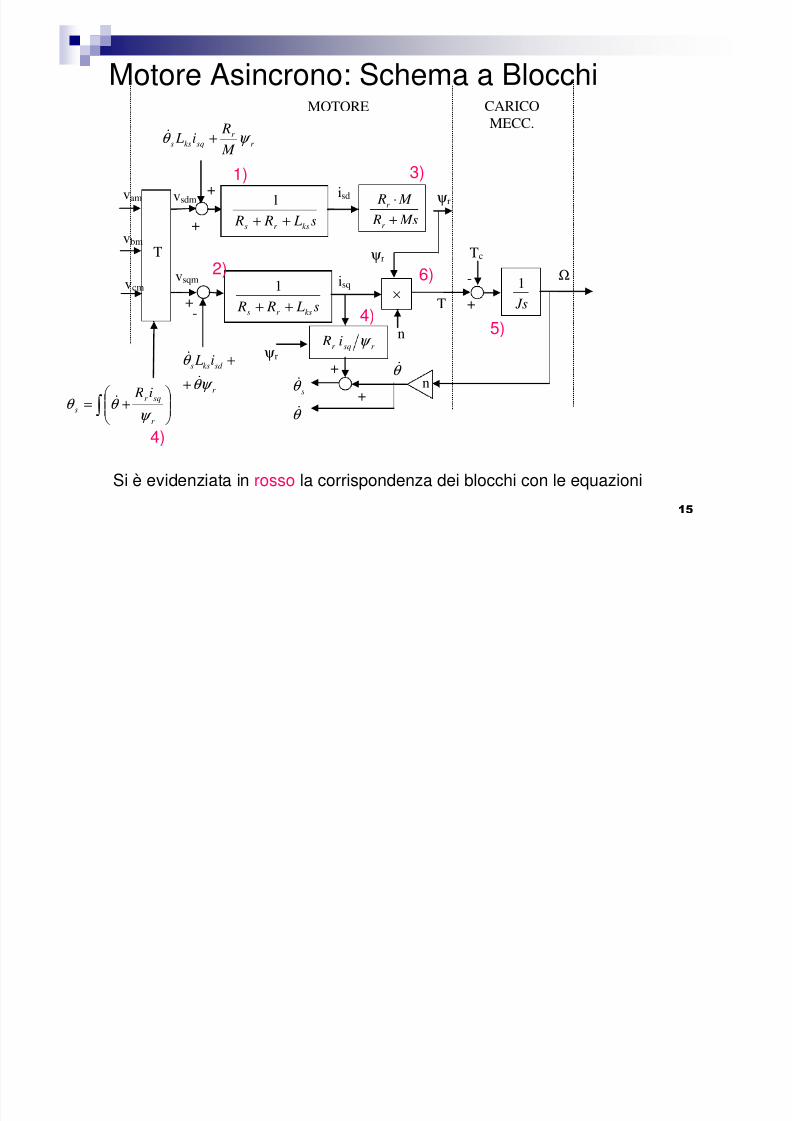
Motore Asincrono: Schema a Blocchi
s L R R ksr s ++
1 +
- Js
1
-
+T
Tc
θ ɺ
MOTORE
×
r sqr i R ψ ψ r
isq
+
+
s L R R ksr s ++1 vsdm
vsqm
T
isd vam
vbm
vcm
CARICO
MECC.
n
Ω
nθ ɺ
r
r
sqkss M
Ri L ψ θ +ɺ
r
sd kss i L
ψ θ
θ
ɺ
ɺ
+
+
Ms R M R
r
r
+⋅ ψ r
ψ r
+
+
sθ ɺ
∫
+=
r
sqr
si R
ψ θ θ ɺ
1)
2)
3)
5)
6)
4)
4)
Si è evidenziata in rosso la corrispondenza dei blocchi con le equazioni
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 16/25
16
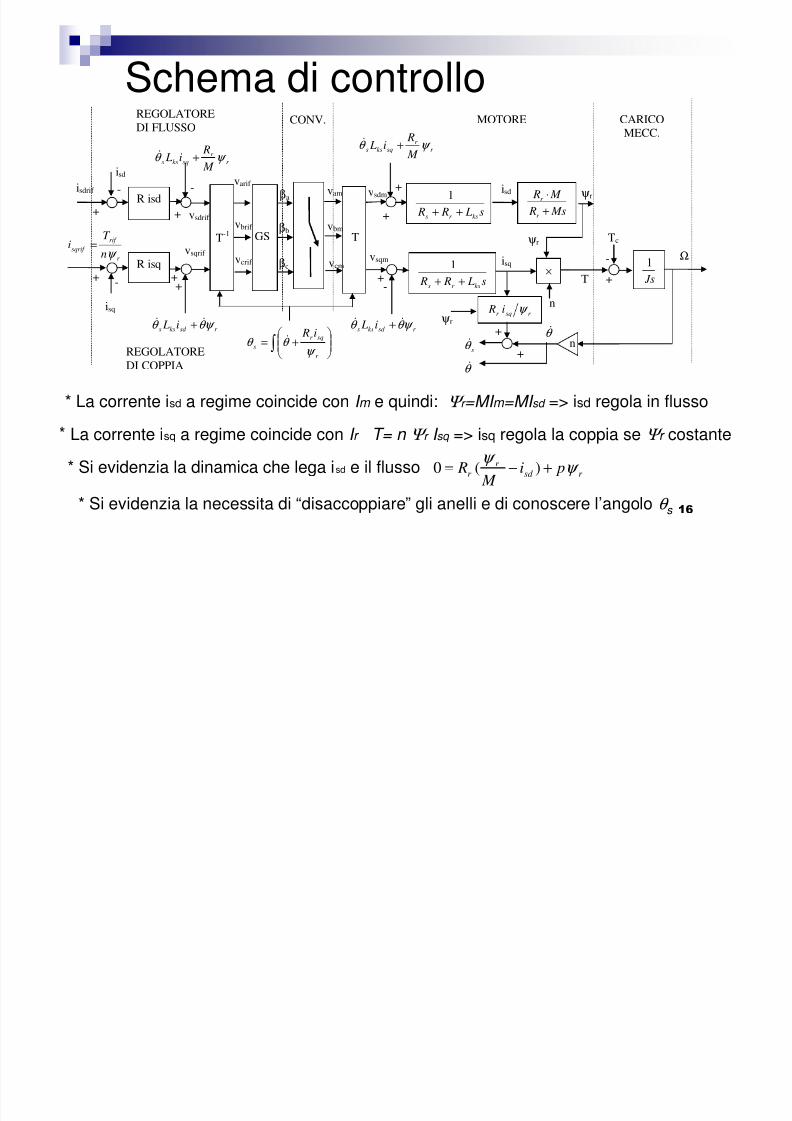
Schema di controllo
vsqrif
isq
s L R R ksr s ++
1
+-
Js
1
-
+T
Tc
-+
θ ɺ
βb
REGOLATORE
DI COPPIA
CONV. MOTORE
T-1
×
r sqr i R ψ ψ r
isq
+
+
s L R R ksr s ++1
vsdm
vsqm
T
isd
βa
βc
varif
vbrif
vcrif
vam
vbm
vcm
CARICO
MECC.
vsdrif
GS
n
Ω
nθ ɺ
isd
-
+
isdrif
+
-
r
r
sqkss M
Ri L ψ θ +ɺ
++
r sd kss i L ψ θ θ ɺɺ +
REGOLATORE
DI FLUSSO
r
r
sqkss M
Ri L ψ θ +ɺ
r sd kss i L ψ θ θ ɺɺ +
Ms R M R
r
r
+⋅ ψ r
ψ r
+
+
sθ ɺ ∫
+=
r
sqr
s
i R
ψ θ θ ɺ
r
rif
sqrif n
T i
ψ =
R isd
R isq
* La corrente isd a regime coincide con I m e quindi: Ψ r =MI m =MI sd => isd regola in flusso
La corrente isq a regime coincide con I r T= n Ψ r I sq => isq regola la coppia se Ψ r costante
r sd r
r pi M
R ψ ψ
+−= )(0* Si evidenzia la dinamica che lega isd e il flusso
* Si evidenzia la necessita di “disaccoppiare” gli anelli e di conoscere l’angolo θ s
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 17/25
17
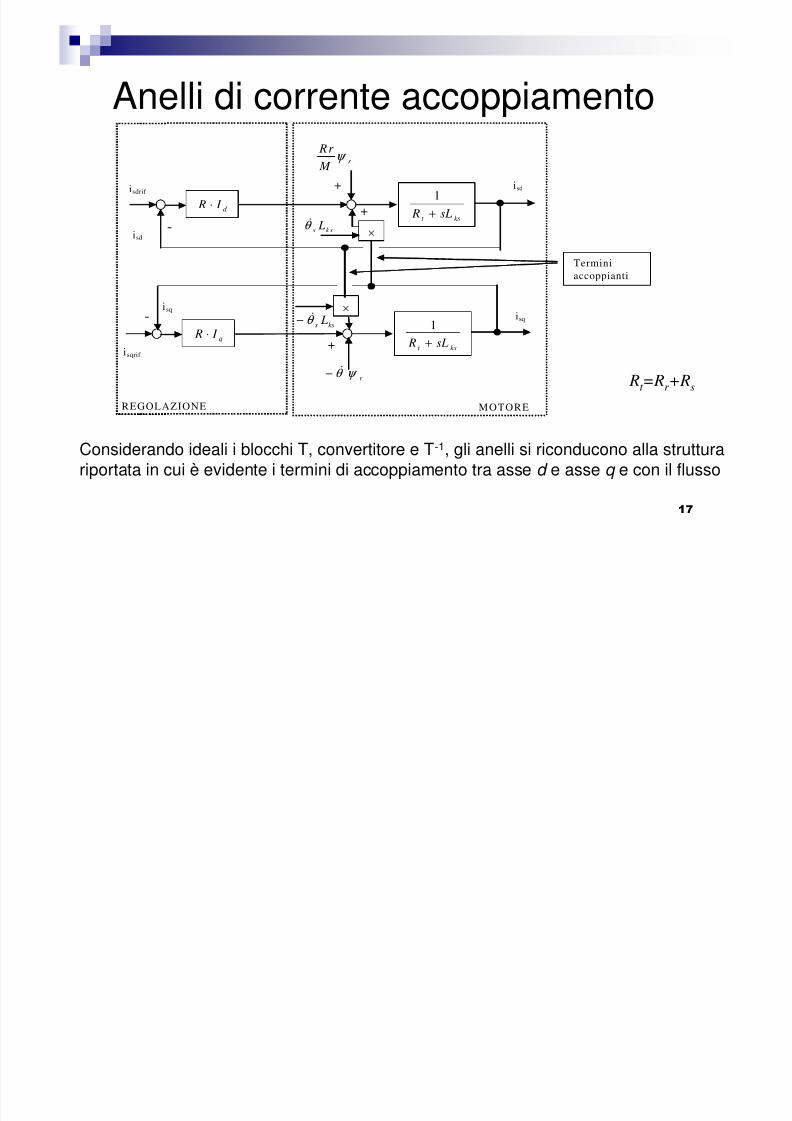
Anelli di corrente accoppiamento
d I R ⋅
kst sL R +
1
r M
Rr ψ
q I R ⋅
kst sL R +
1
r ψ θ ɺ−
×
×
kssLθ ɺ
kssLθ ɺ−
isd
isd
isdrif
isq
isq
isqrif
-
-
+
+
+
Termini
accoppianti
MOTOREREGOLAZIONE
Rt =Rr +Rs
Considerando ideali i blocchi T, convertitore e T-1, gli anelli si riconducono alla struttura
riportata in cui è evidente i termini di accoppiamento tra asse d e asse q e con il flusso
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 18/25
18
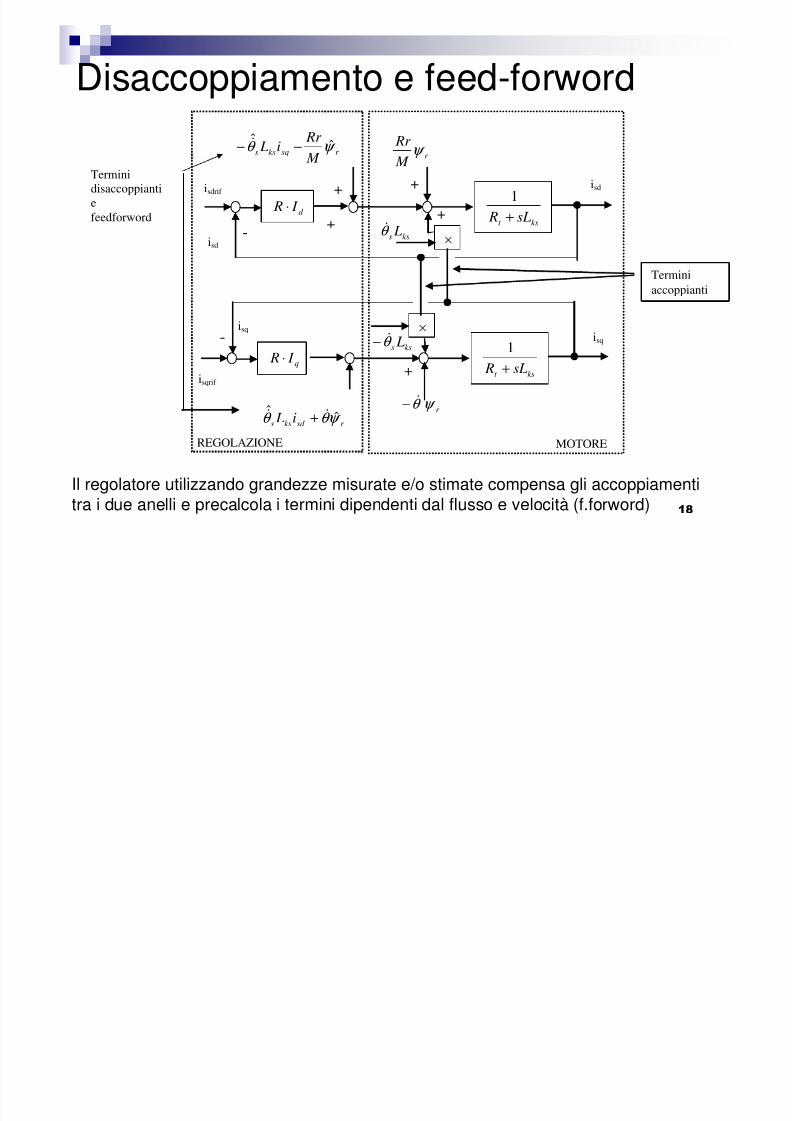
Disaccoppiamento e feed-forword
d I R ⋅
kst sL R +1
r sqkss M
Rr i L ψ θ ˆˆ
−− ɺ r
M
Rr ψ
q I R ⋅kst sL R +
1
r sd kss i L ψ θ θ ˆˆ ɺɺ + r ψ θ ɺ−
×
×
kss Lθ ɺ
kss Lθ ɺ−
isd
isd
isdrif
isq
isq
isqrif
-
-
+
+
+
+
+
Termini
accoppianti
Termini
disaccoppianti
efeedforword
MOTOREREGOLAZIONE
Il regolatore utilizzando grandezze misurate e/o stimate compensa gli accoppiamentitra i due anelli e precalcola i termini dipendenti dal flusso e velocità (f.forword)
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 19/25
19
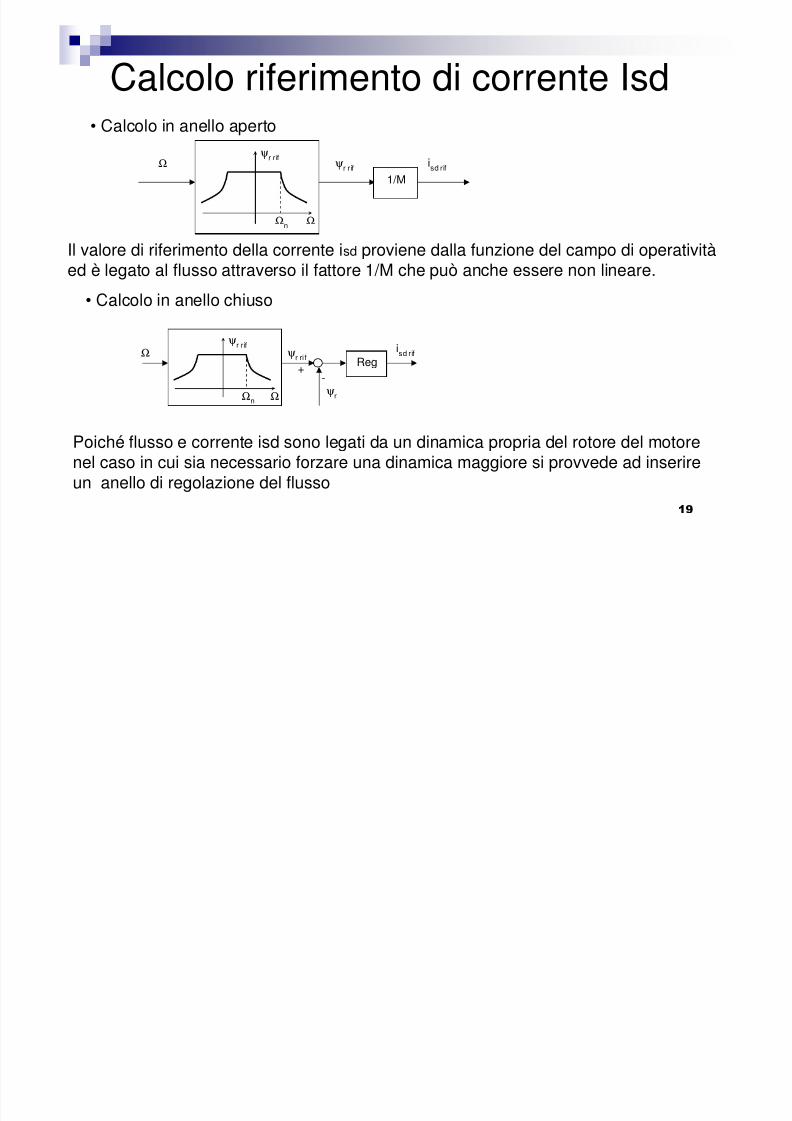
Calcolo riferimento di corrente Isd
Ω
Ωn
ψ r rif
1/M
isd rif
ψ r rif
Ω
Ω
Ωn
ψ r ri f
Reg
isd rif
ψ r rif
Ω ψ r
-+
Il valore di riferimento della corrente isd proviene dalla funzione del campo di operatività
ed è legato al flusso attraverso il fattore 1/M che può anche essere non lineare.
• Calcolo in anello aperto
• Calcolo in anello chiuso
Poiché flusso e corrente isd sono legati da un dinamica propria del rotore del motore
nel caso in cui sia necessario forzare una dinamica maggiore si provvede ad inserire
un anello di regolazione del flusso
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 20/25
20
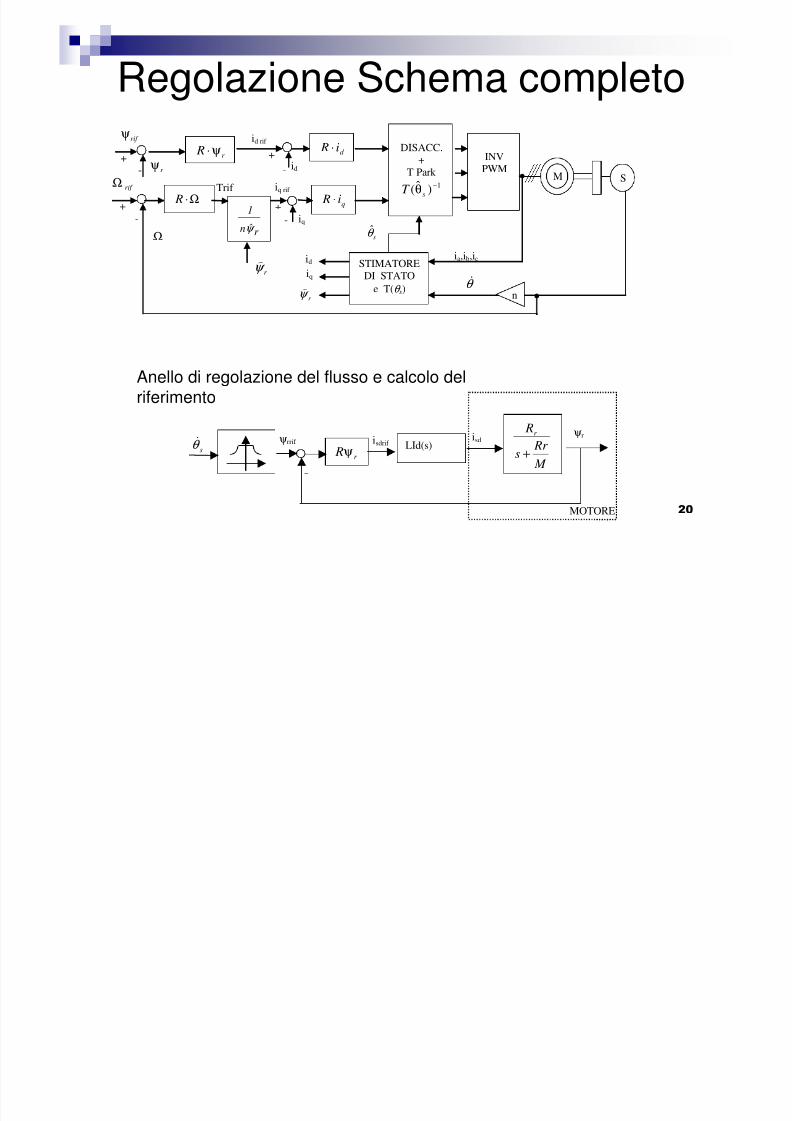
Regolazione Schema completo
+
-
-
+
-
-
+
+
Trif
r R ψ ⋅ d i R ⋅
Ω⋅ R qi R ⋅
r ˆ n
1
ψ
DISACC.
+
T Park 1)ˆ( −θs
T
INV
PWMS
STIMATORE
DI STATO
e T(θ s)
rif ψ
rif Ω
r ψ
id rif
iq rif
id
iq
id
iq
r ψ
sθ
ia,ib,ic
θ ɺ
M
r ψ
Ω
n
sθ ɺ
r Rψ LId(s)
M
Rr s
Rr
+isdrif ψ rrif isd
ψ r
-
MOTORE
Anello di regolazione del flusso e calcolo del
riferimento
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 21/25
21
Il controllo Scalare•Per controllo scalare si intende una architettura di controllo dellavelocità angolare che per la definizione dei comandi dell’inverter atensione impressa che alimenta l’asincrono si avvale di grandezzeelettromeccaniche (calcolate o misurate) scalari ma non di fasorispaziali.•Si tratta di metodi di controllo, in anello aperto rispetto alla coppia edal flusso, a basso costo, ampiamente usati nelle applicazioni in cui
occorre conseguire buoni risultati a regime senza stringenticaratteristiche dinamiche della qualità della regolazione.•Tipiche applicazioni riguardano:
•il trattamento dei fluidi
•movimentazioni con dinamiche lente•carichi di piccola e media potenza con momenti di inerziasignificativi e dinamica lenta.
•Viene nel seguito presentata l’architettura definita “a volt/hertz
costante”
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 22/25
22
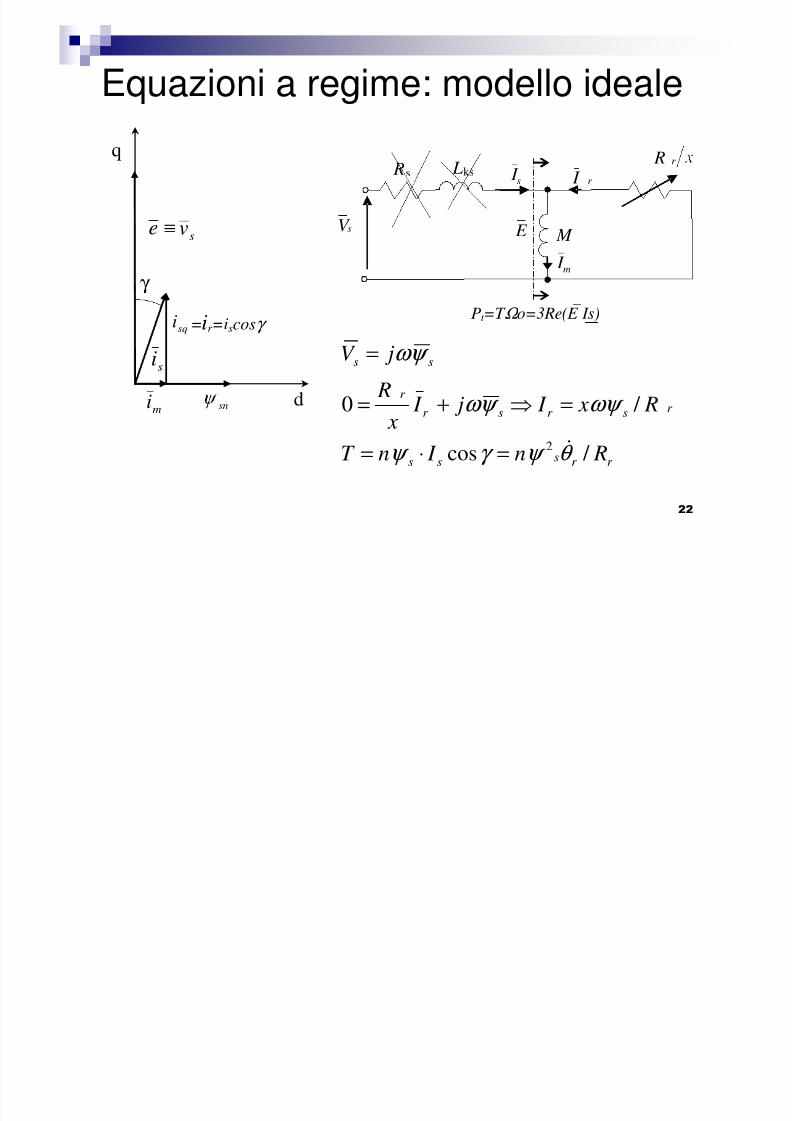
Equazioni a regime: modello ideale
s V
s I
M
m I
r I R r
Rs Lks
E
Pt =T Ω o=3Re(E Is)
d
q
mi
si
sv ≡e
sn
sqi =ir =iscosγ
γ
r r sss
r sr sr r
ss
Rn I nT
R x I j I x
R
jV
/ cos
/ 0
2 θ ψ γ ψ
ωψ ψ ω
ψ ω
ɺ=⋅=
=⇒+=
=
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 23/25
23
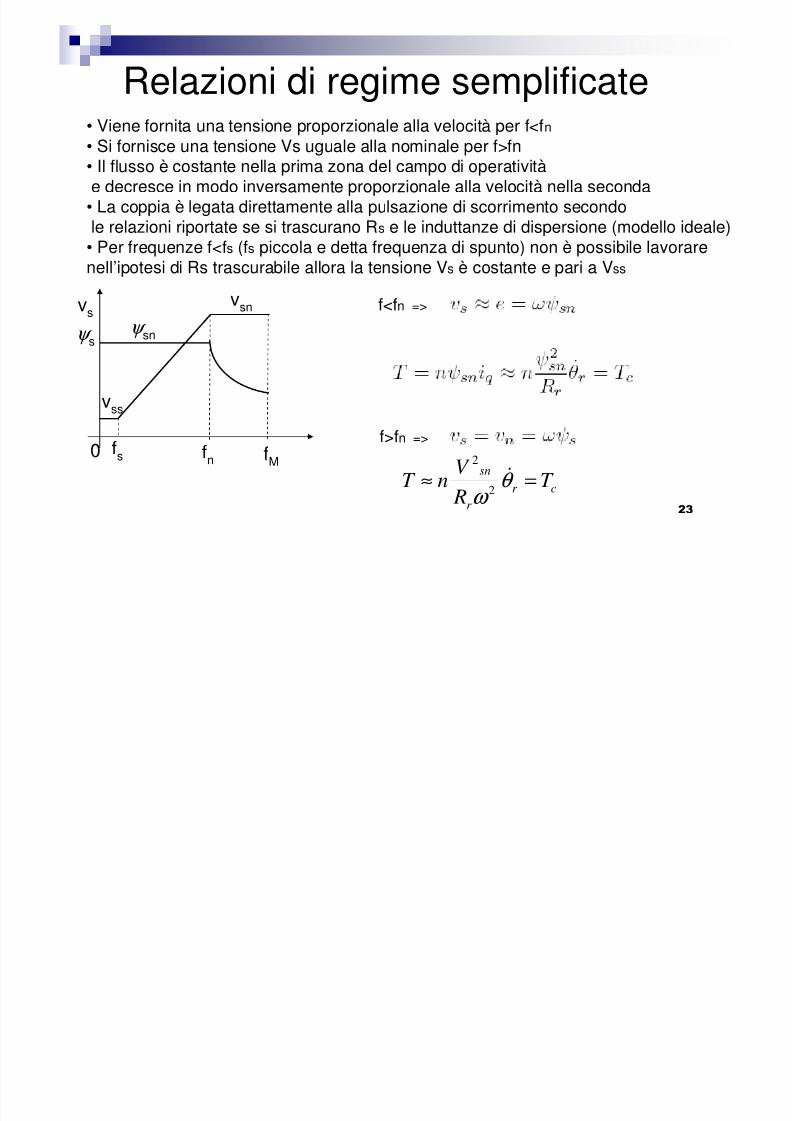
Relazioni di regime semplificate
vs
0 fs fn fM
vsn
ψ snψ s
f<fn =>
f>fn =>
cr r
snT
R
V nT =≈ θ
ω
ɺ
2
2
• Viene fornita una tensione proporzionale alla velocità per f<fn
• Si fornisce una tensione Vs uguale alla nominale per f>fn• Il flusso è costante nella prima zona del campo di operatività
e decresce in modo inversamente proporzionale alla velocità nella seconda
• La coppia è legata direttamente alla pulsazione di scorrimento secondole relazioni riportate se si trascurano Rs e le induttanze di dispersione (modello ideale)
• Per frequenze f<fs (fs piccola e detta frequenza di spunto) non è possibile lavorare
nell’ipotesi di Rs trascurabile allora la tensione Vs è costante e pari a Vss
vss
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 24/25
24
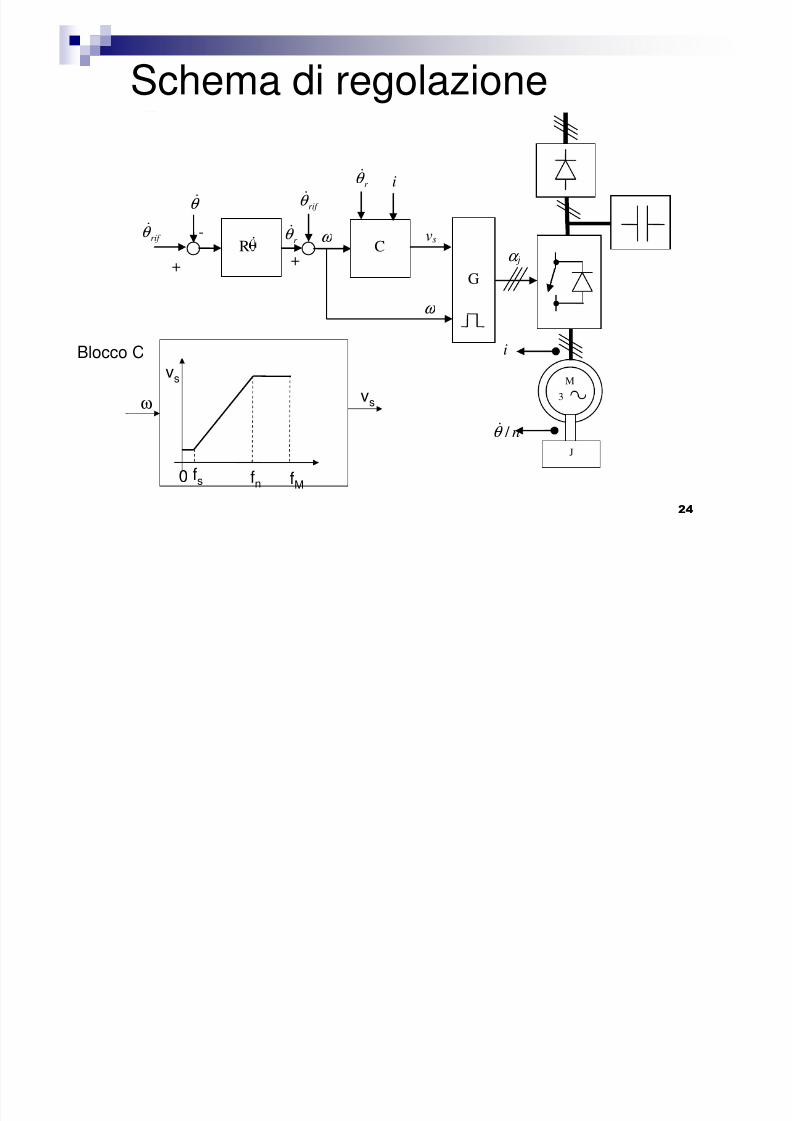
Schema di regolazione
M
3
G
CRɺ
θ ɺ
rif θ ɺ
+
-
+
r θ ɺ
rif θ ɺ
r θ ɺ i
i
n / θ ɺ
vs
α j
J
ω vs
vs
0 fs fn fM
Blocco C
5/12/2018 Il Controllo Della Macchina a Induzione - slidepdf.com
http://slidepdf.com/reader/full/il-controllo-della-macchina-a-induzione 25/25
25
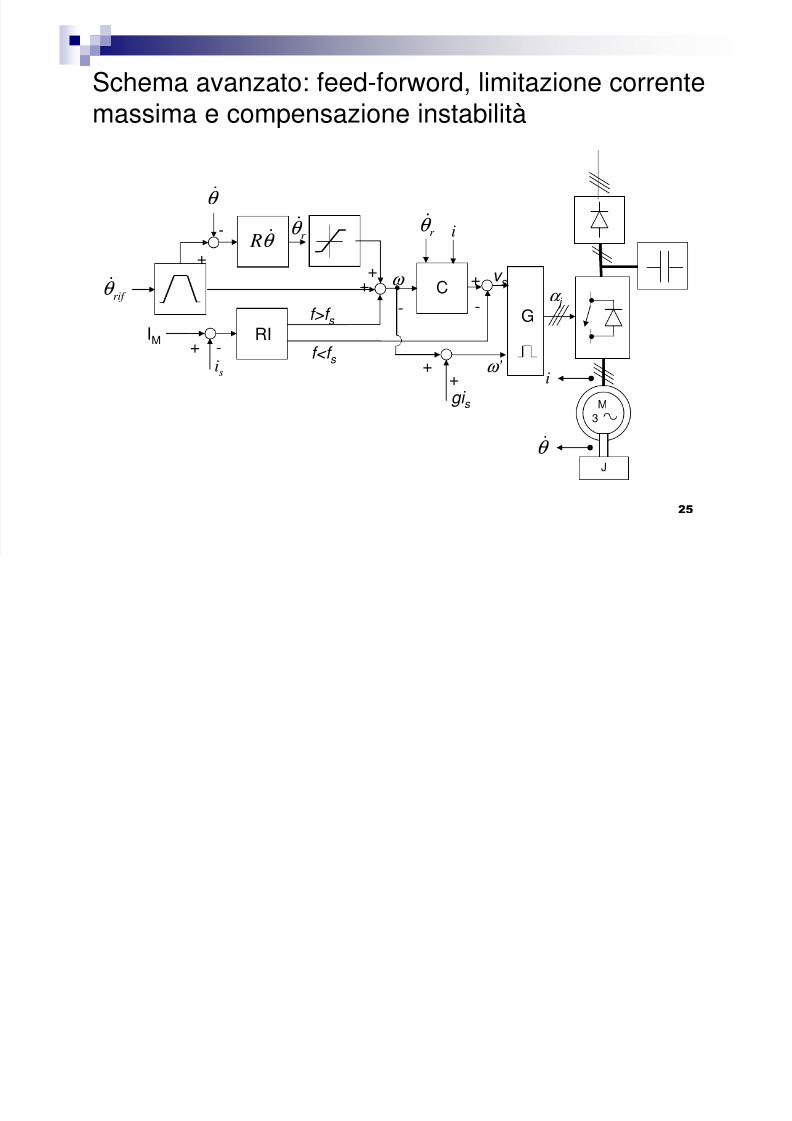
Schema avanzato: feed-forword, limitazione corrente
massima e compensazione instabilità
M
3
G
C
i
i
ω
ω ’
v s
α j
J
+
-
++
++
-
+
-
gi s
RIIM
is
f>f s
f<f s + -
r θ ɺ
rif θ
ɺ
θ ɺ R
θ ɺ
θ ɺ
r θ ɺ