II. OPTIMISATION SANS CONTRAINTE min f(x) avec x ε...
64
II. OPTIMISATION SANS CONTRAINTE min f(x) avec x ε R n –Méthodes de recherche unidimensionnelle –Méthodes du gradient –Méthodes des directions conjuguées –Méthode de Newton et méthode de Levenberg-Marquardt –Méthodes quasi-Newton –Méthodes sans calcul du gradient –Résolution d’équations non linéaires
Transcript of II. OPTIMISATION SANS CONTRAINTE min f(x) avec x ε...
II. OPTIMISATION SANS CONTRAINTE
min f(x) avec x ε Rn
– Méthodes de recherche unidimensionnelle
– Méthodes du gradient
– Méthodes des directions conjuguées
– Méthode de Newton et méthode de Levenberg-Marquardt
– Méthodes quasi-Newton
– Méthodes sans calcul du gradient
– Résolution d’équations non linéaires
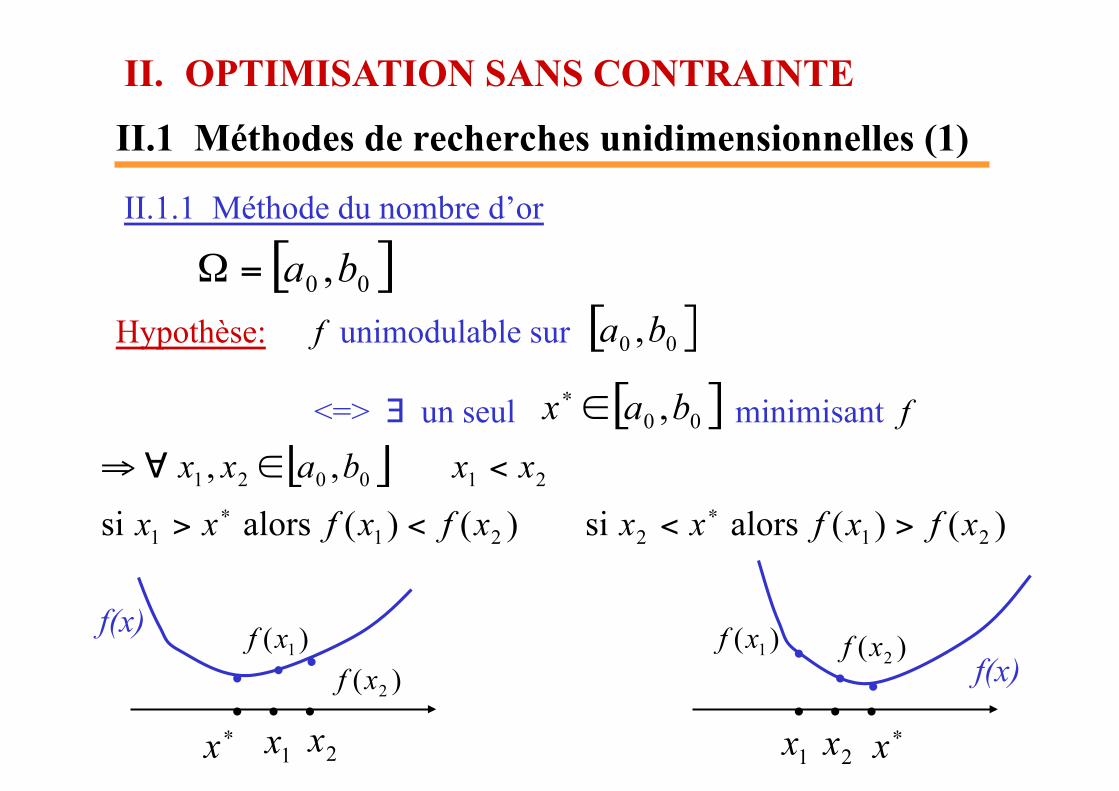
II.1 Méthodes de recherches unidimensionnelles (1)
II.1.1 Méthode du nombre d’or
II. OPTIMISATION SANS CONTRAINTE
Hypothèse: f unimodulable sur
<=> ∃ un seul minimisant f
• • • • • •
f(x) f(x) • • • •
• •
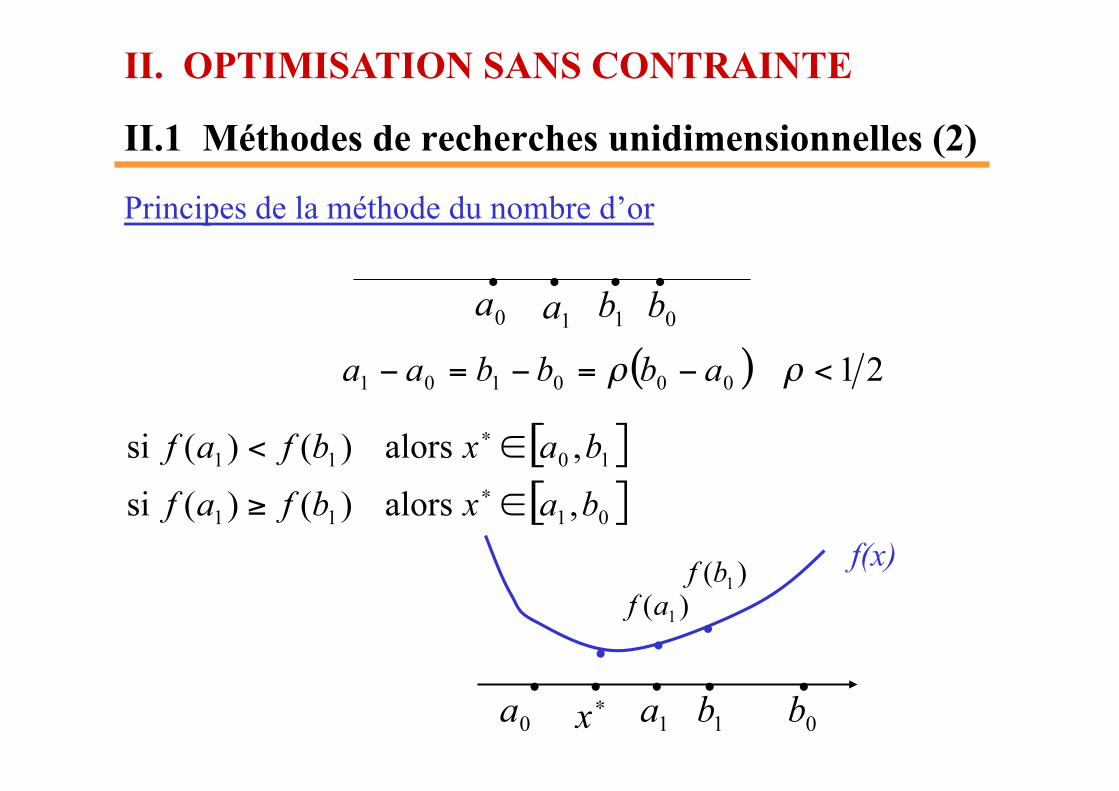
II.1 Méthodes de recherches unidimensionnelles (2)
Principes de la méthode du nombre d’or
II. OPTIMISATION SANS CONTRAINTE
f(x)
• • •
• • • •
• • • • •
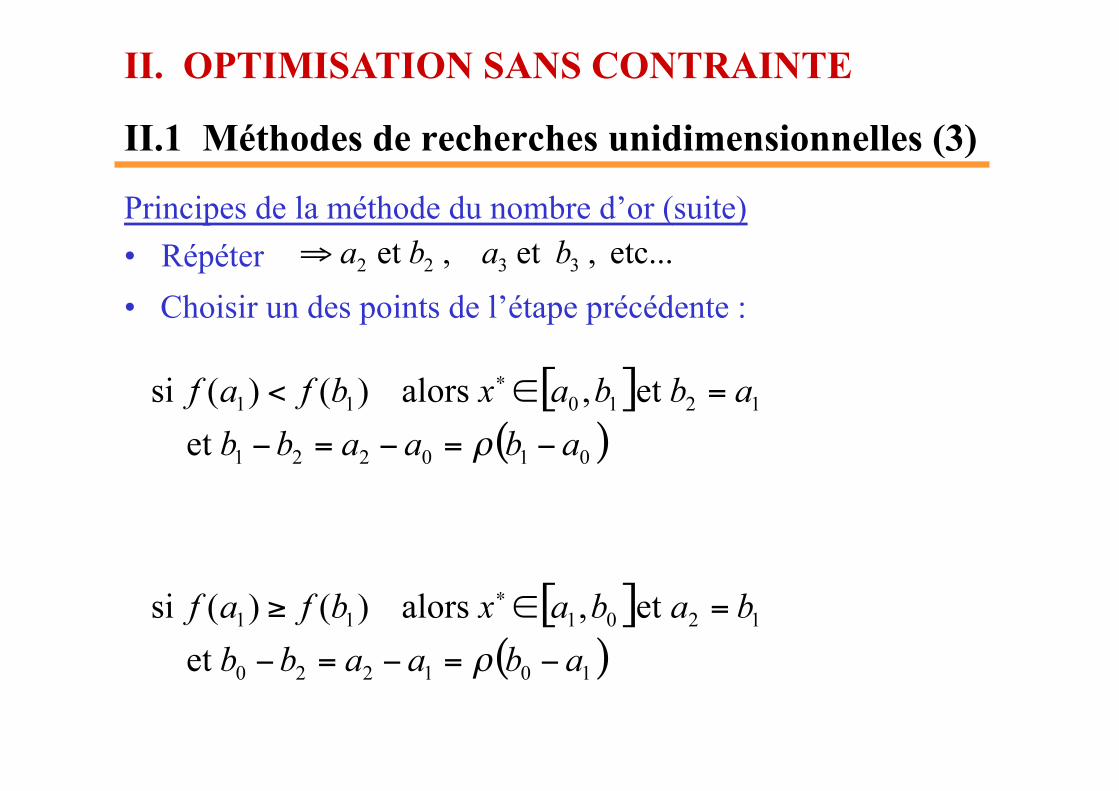
II.1 Méthodes de recherches unidimensionnelles (3)
II. OPTIMISATION SANS CONTRAINTE
• Choisir un des points de l’étape précédente :
Principes de la méthode du nombre d’or (suite) • Répéter
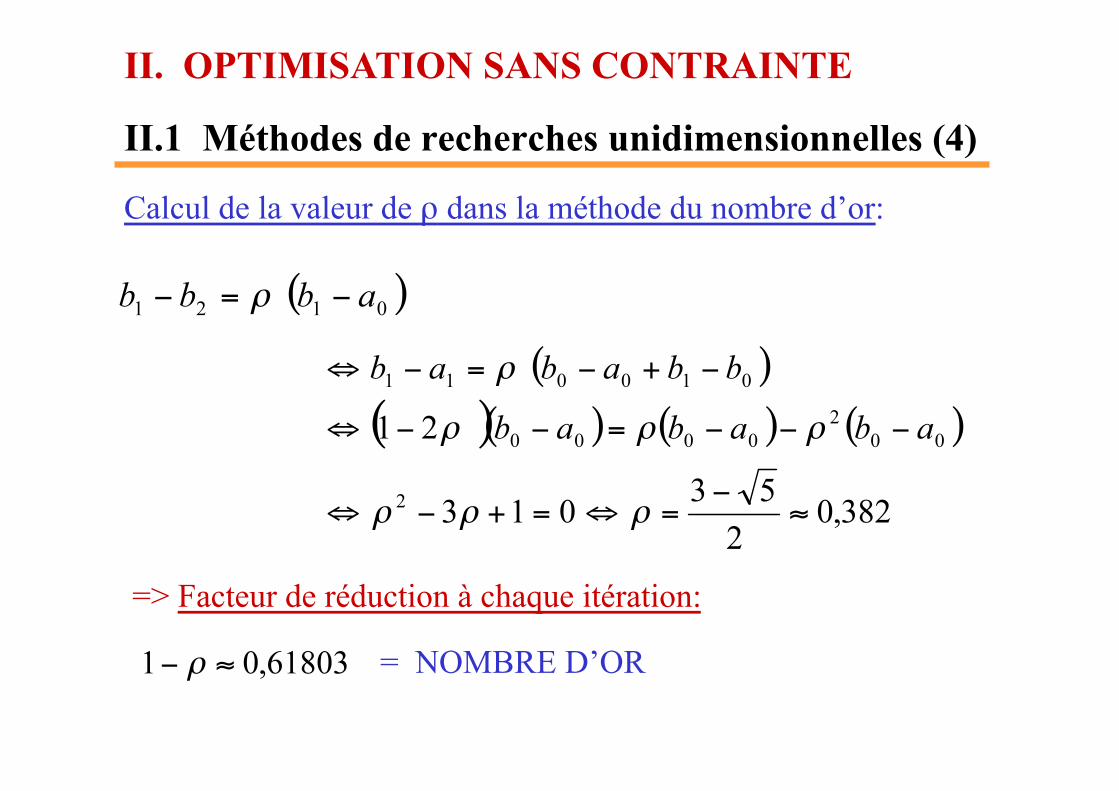
II.1 Méthodes de recherches unidimensionnelles (4)
II. OPTIMISATION SANS CONTRAINTE
=> Facteur de réduction à chaque itération:
= NOMBRE D’OR
Calcul de la valeur de ρ dans la méthode du nombre d’or:
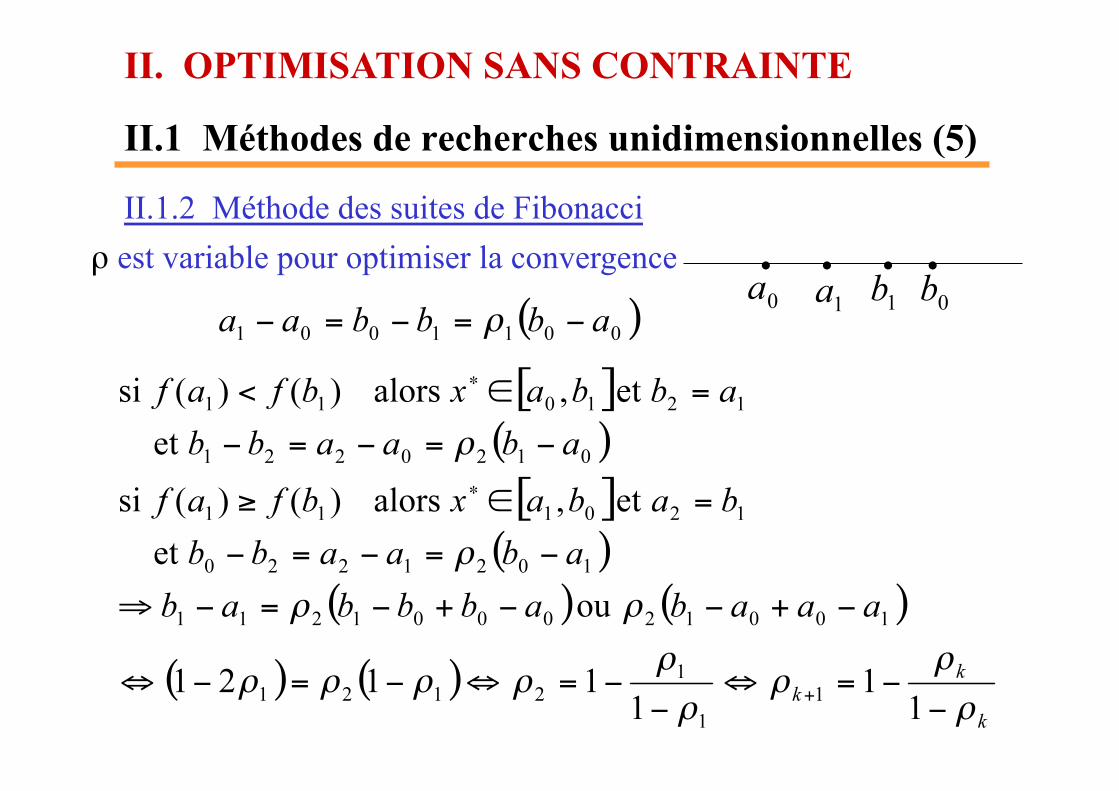
II.1 Méthodes de recherches unidimensionnelles (5)
II.1.2 Méthode des suites de Fibonacci
II. OPTIMISATION SANS CONTRAINTE
ρ est variable pour optimiser la convergence • • • •
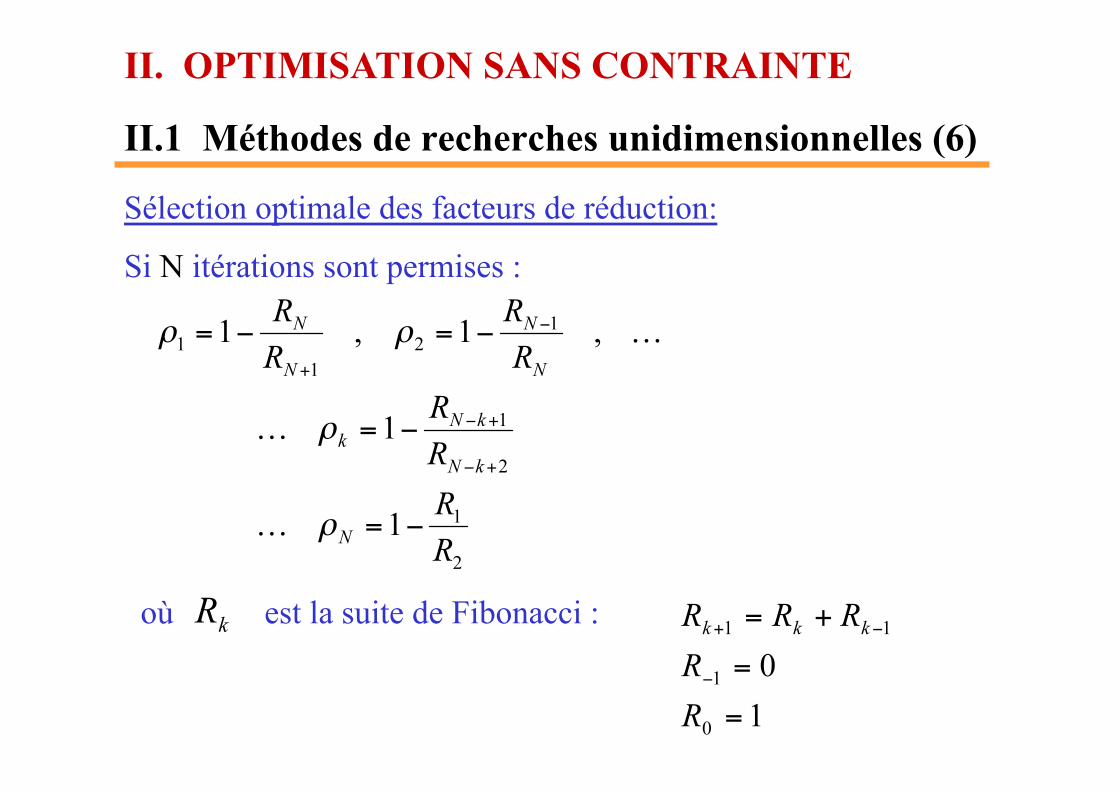
II.1 Méthodes de recherches unidimensionnelles (6)
Sélection optimale des facteurs de réduction:
II. OPTIMISATION SANS CONTRAINTE
Si N itérations sont permises :
est la suite de Fibonacci : où
II.1 Méthodes de recherches unidimensionnelles (7)
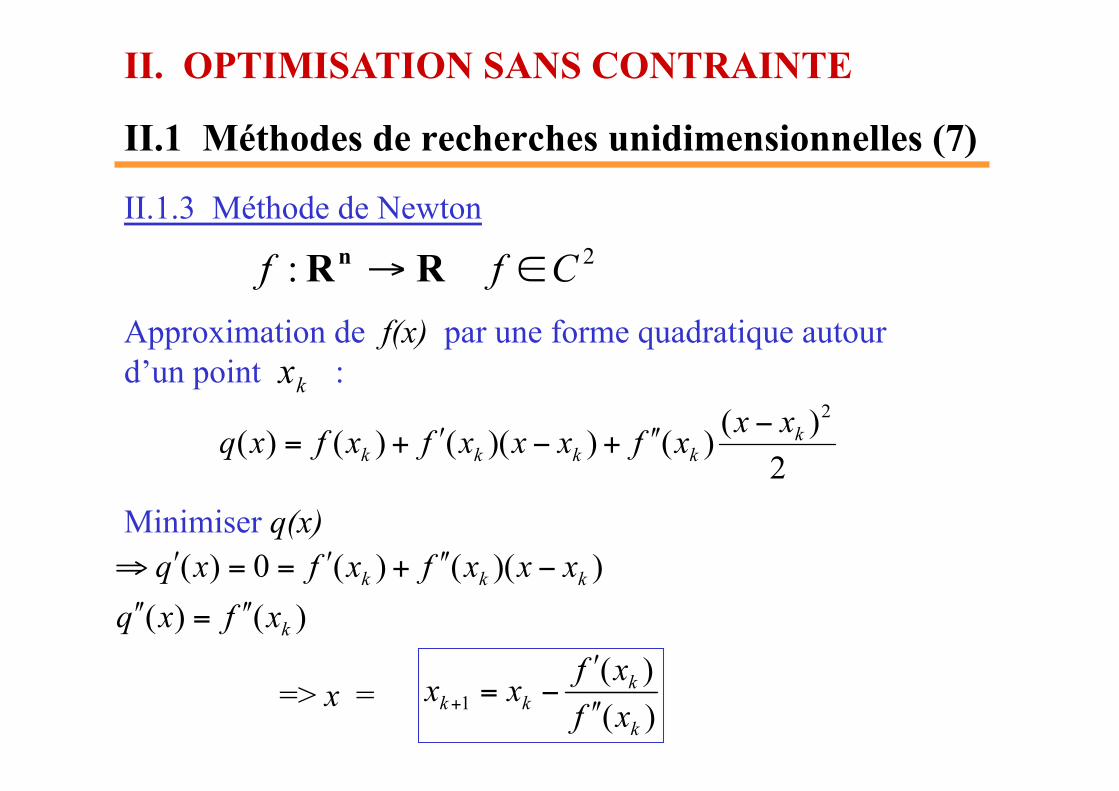
II.1.3 Méthode de Newton
II. OPTIMISATION SANS CONTRAINTE
Approximation de f(x) par une forme quadratique autour d’un point :
Minimiser q(x)
=> x =
II.1 Méthodes de recherches unidimensionnelles (8)
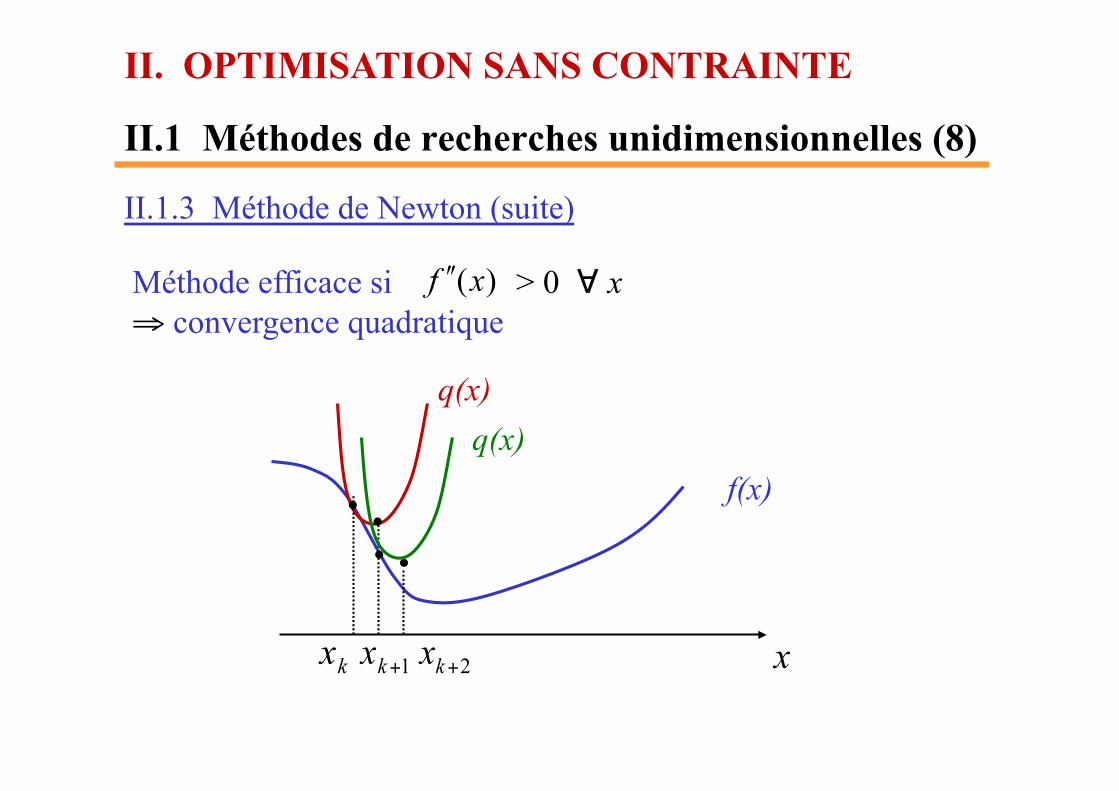
II.1.3 Méthode de Newton (suite)
II. OPTIMISATION SANS CONTRAINTE
Méthode efficace si > 0 ∀ x ⇒ convergence quadratique
f(x)
q(x)
• • • •
q(x)
II.1 Méthodes de recherches unidimensionnelles (9)
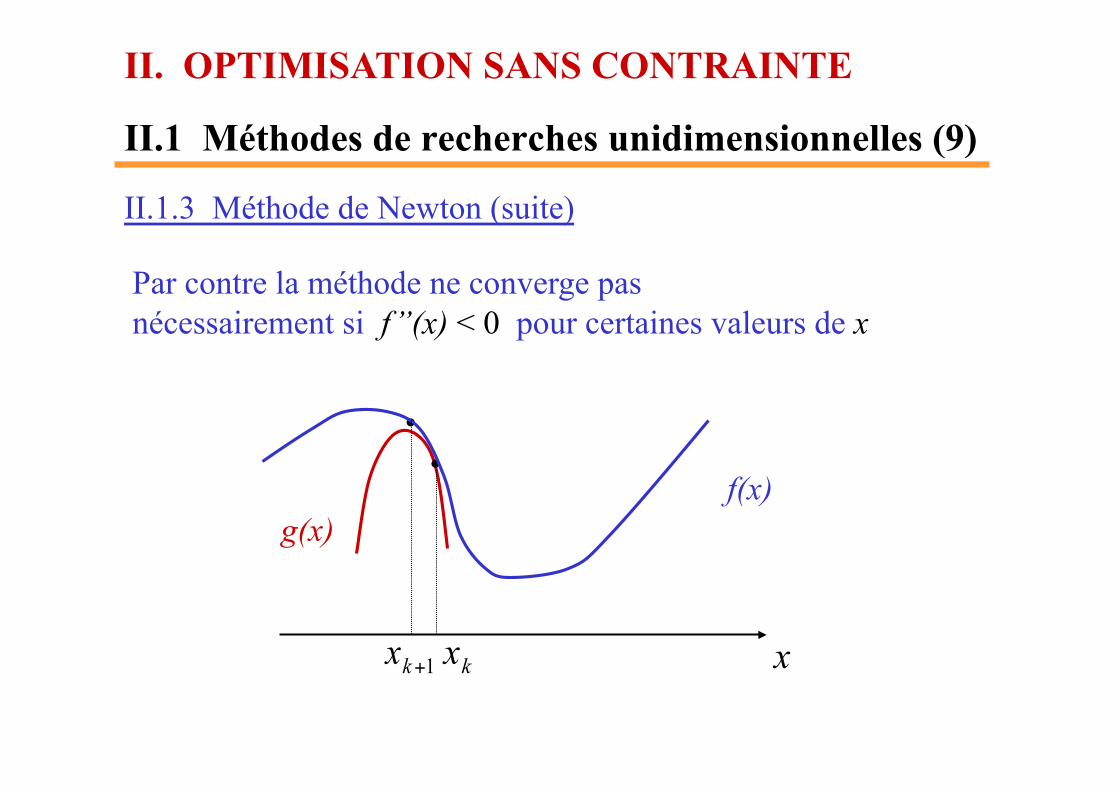
II.1.3 Méthode de Newton (suite)
II. OPTIMISATION SANS CONTRAINTE
Par contre la méthode ne converge pas nécessairement si f’’(x) < 0 pour certaines valeurs de x
f(x) g(x)
• •
II.1 Méthodes de recherches unidimensionnelles (10)
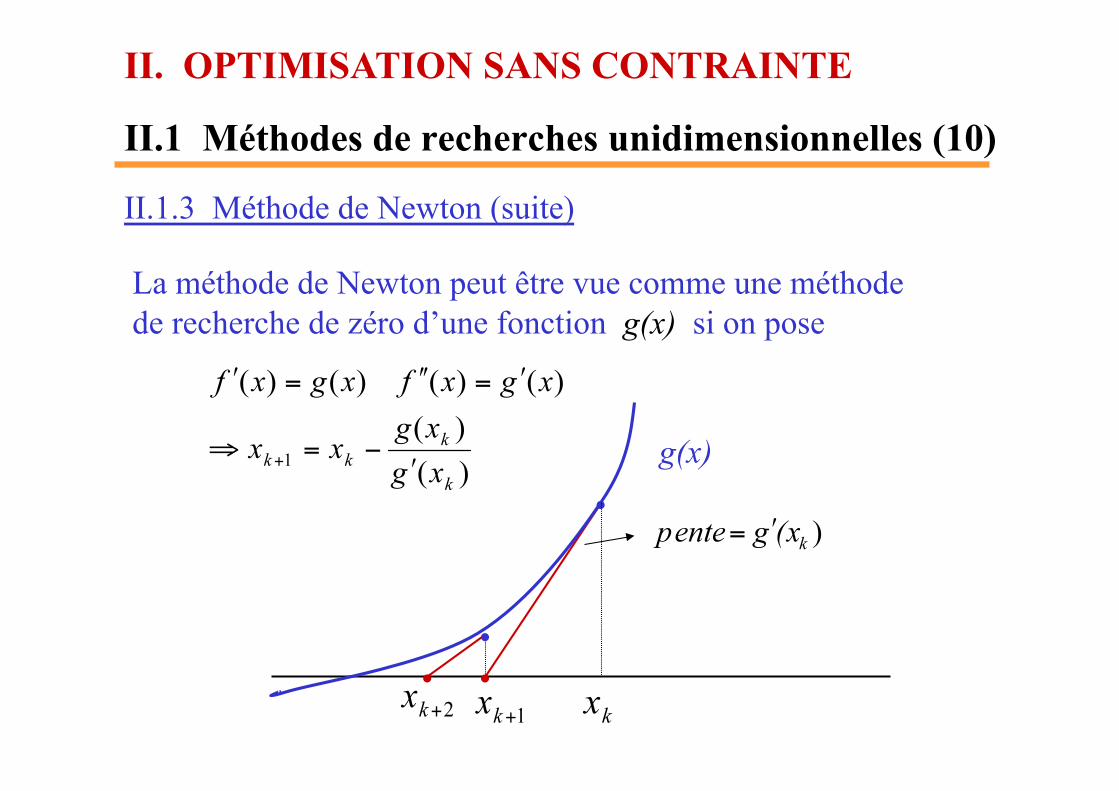
II.1.3 Méthode de Newton (suite)
II. OPTIMISATION SANS CONTRAINTE
La méthode de Newton peut être vue comme une méthode de recherche de zéro d’une fonction g(x) si on pose
• •
•
•
g(x)
II.1 Méthodes de recherches unidimensionnelles (11)
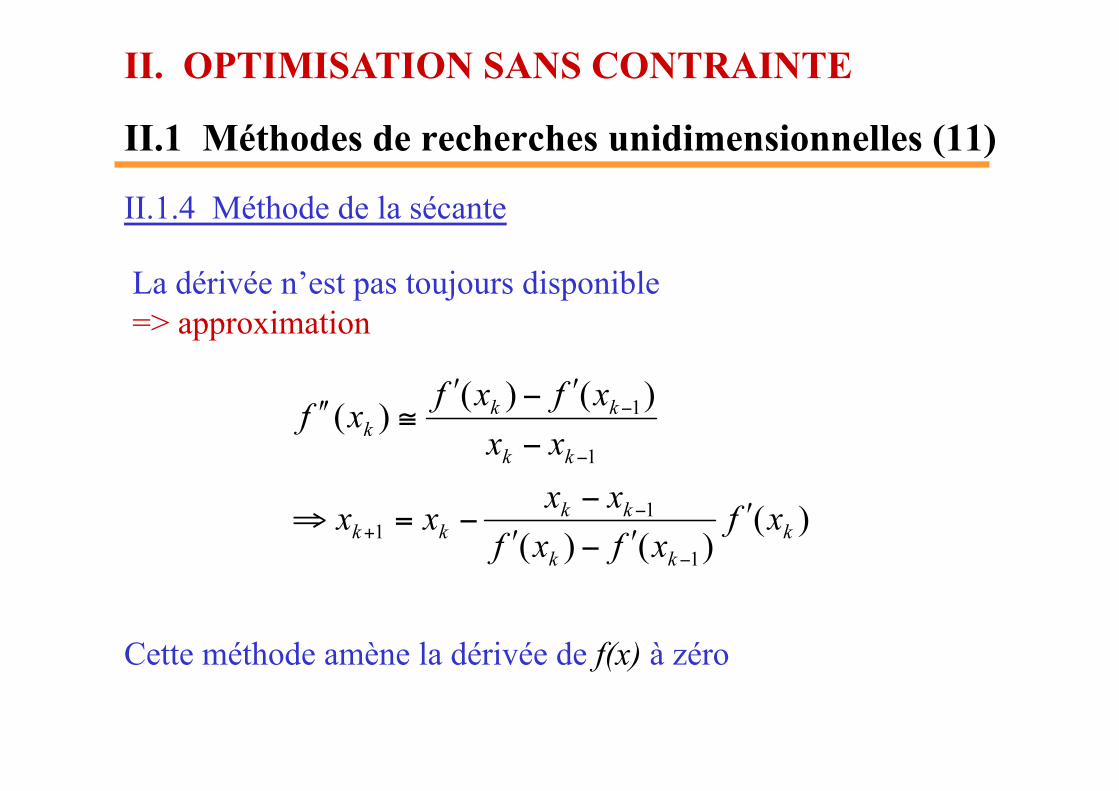
II.1.4 Méthode de la sécante
II. OPTIMISATION SANS CONTRAINTE
La dérivée n’est pas toujours disponible => approximation
Cette méthode amène la dérivée de f(x) à zéro
II.1 Méthodes de recherches unidimensionnelles (12)
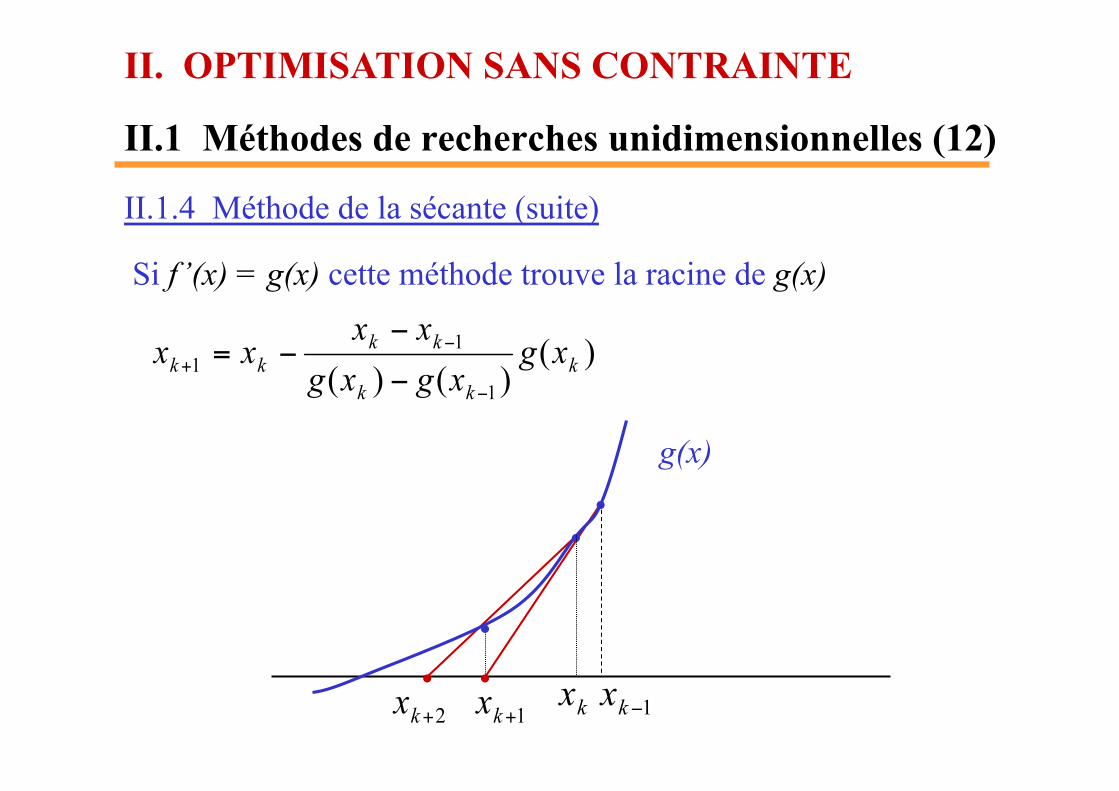
II.1.4 Méthode de la sécante (suite)
II. OPTIMISATION SANS CONTRAINTE
• •
•
•
g(x)
Si f’(x) = g(x) cette méthode trouve la racine de g(x)
•
II.1 Méthodes de recherches unidimensionnelles (13)
II.1.5 Méthodes unidirectionnelles « Line search »
II. OPTIMISATION SANS CONTRAINTE
= solution d’un problème unidimensionnel
Exemple: méthode de la sécante
II.1 Méthodes de recherches unidimensionnelles (14)
II. OPTIMISATION SANS CONTRAINTE
Il n’est pas nécessaire de calculer précisément α* si de manière significative
• If faut distinguer 2 cas : f dérivable et f non dérivable
• La recherche de α* se fait souvent en deux étapes: 1. Déterminer un intervalle contenant α* 2. Réduire cet intervalle
II.1.5 Méthodes unidirectionnelles (suite)
!
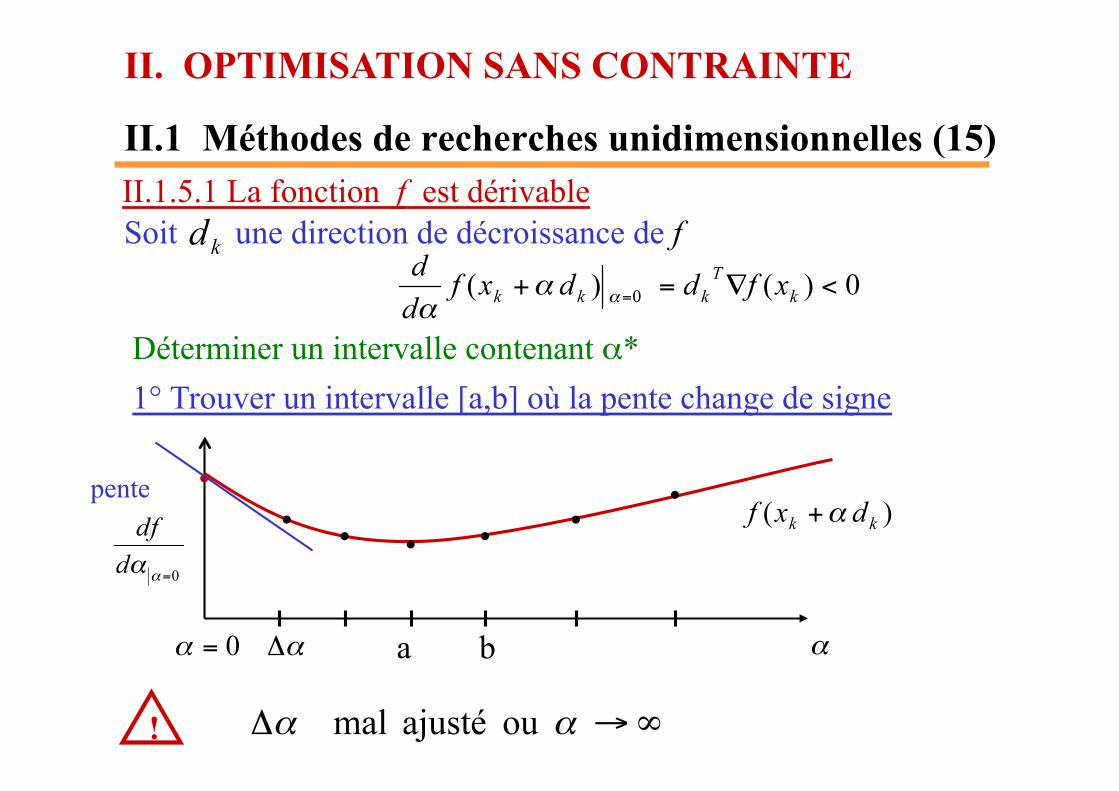
II.1 Méthodes de recherches unidimensionnelles (15)
Déterminer un intervalle contenant α*
II. OPTIMISATION SANS CONTRAINTE
1° Trouver un intervalle [a,b] où la pente change de signe
• • • • • •
•
a b
pente
!
II.1.5.1 La fonction f est dérivable Soit une direction de décroissance de f
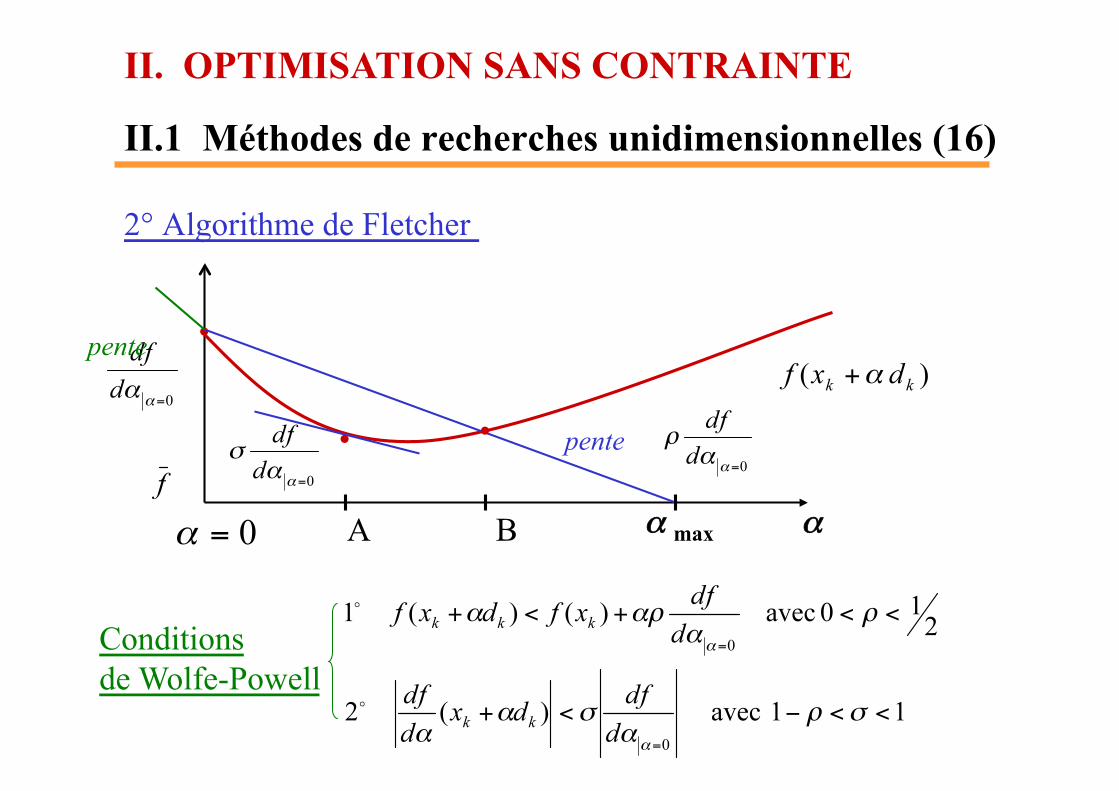
II.1 Méthodes de recherches unidimensionnelles (16)
2° Algorithme de Fletcher
II. OPTIMISATION SANS CONTRAINTE
•
• •
A B
pente
α max
pente
α
Conditions de Wolfe-Powell
II.1 Méthodes de recherches unidimensionnelles (17)
II. OPTIMISATION SANS CONTRAINTE
1. Utiliser des différences finies au lieu des dérivées. 2. Méthode du nombre d’or ou des suites de Fibonacci si un
intervalle [0, αmax] a été identifié. 3. Interpolation quadratique en 3 points avec recherche de minimum:
méthode souvent utilisée (e.g.. MATLAB).
II.1.5.2. La fonction f est non dérivable
II.2 Méthode du Gradient (1)
II. OPTIMISATION SANS CONTRAINTE
Indique la direction avec le plus grand taux de décroissance de f au point
=> Algorithme du Gradient:
Soit
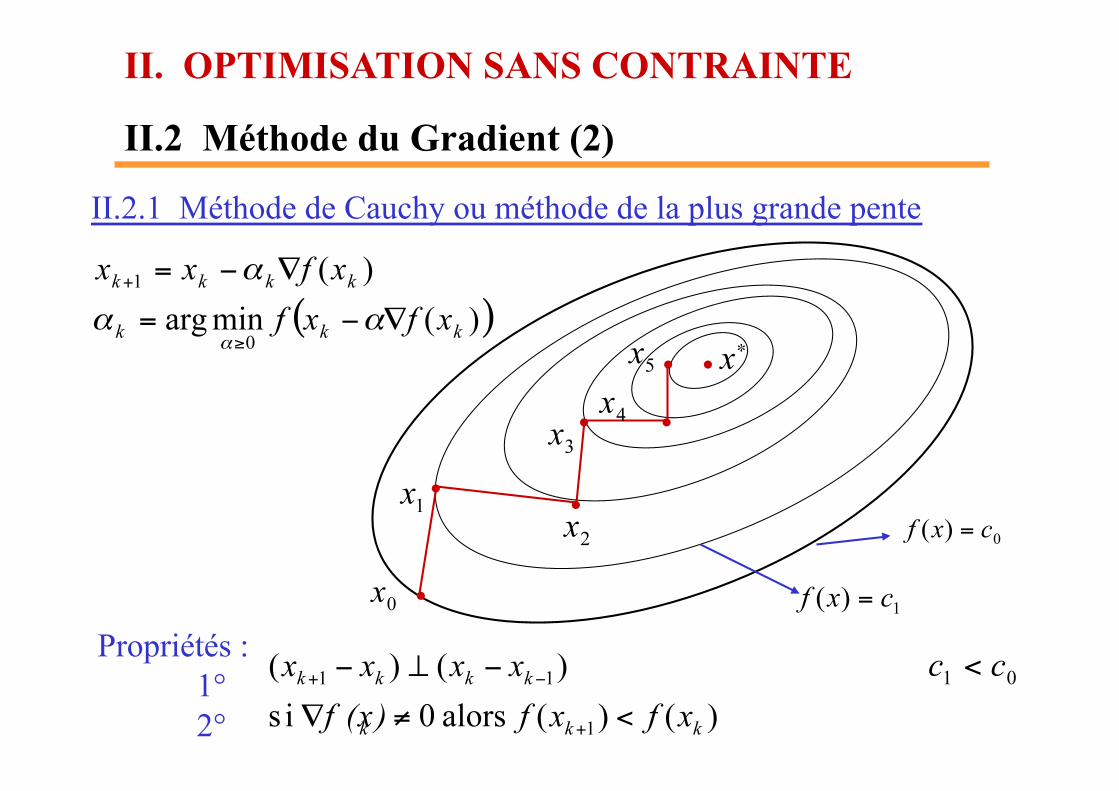
II.2 Méthode du Gradient (2)
II. OPTIMISATION SANS CONTRAINTE
II.2.1 Méthode de Cauchy ou méthode de la plus grande pente
• •
•
• •
•
•
Propriétés : 1° 2°
II.2 Méthode du Gradient (3)
II. OPTIMISATION SANS CONTRAINTE
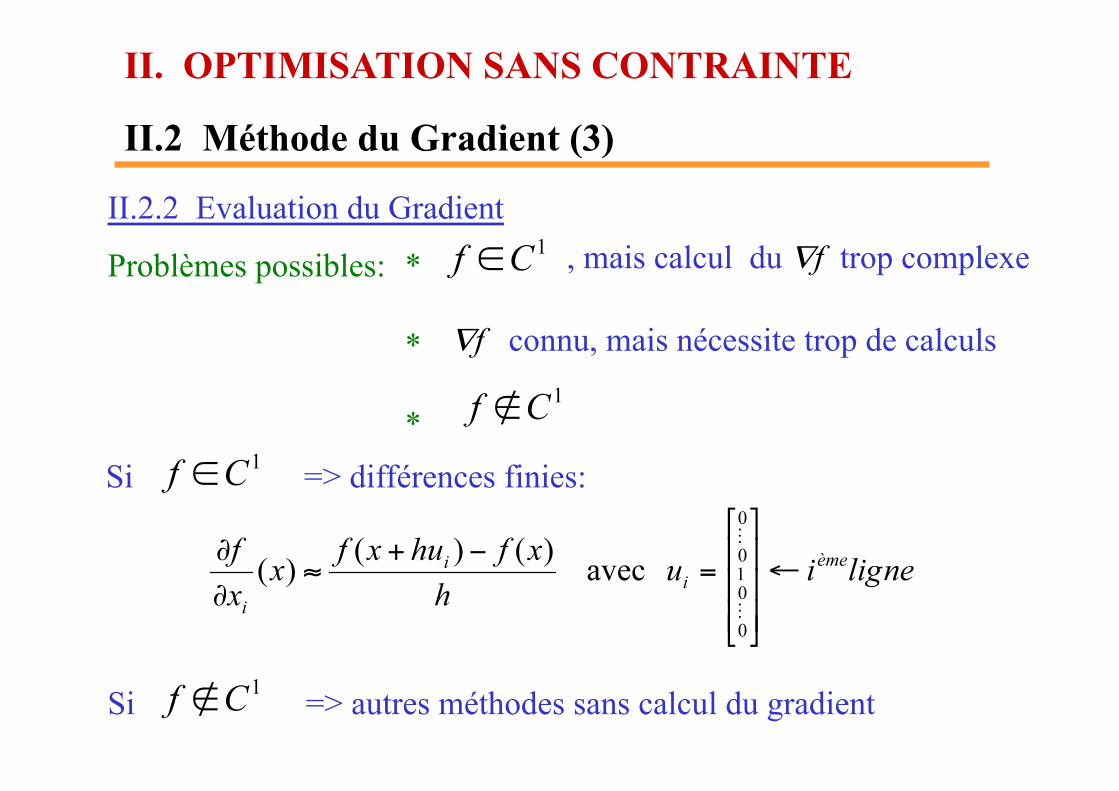
II.2.2 Evaluation du Gradient
Problèmes possibles: * *
*
, mais calcul du ∇f trop complexe
∇f connu, mais nécessite trop de calculs
Si => différences finies:
Si => autres méthodes sans calcul du gradient
II.2 Méthode du Gradient (4)
II. OPTIMISATION SANS CONTRAINTE
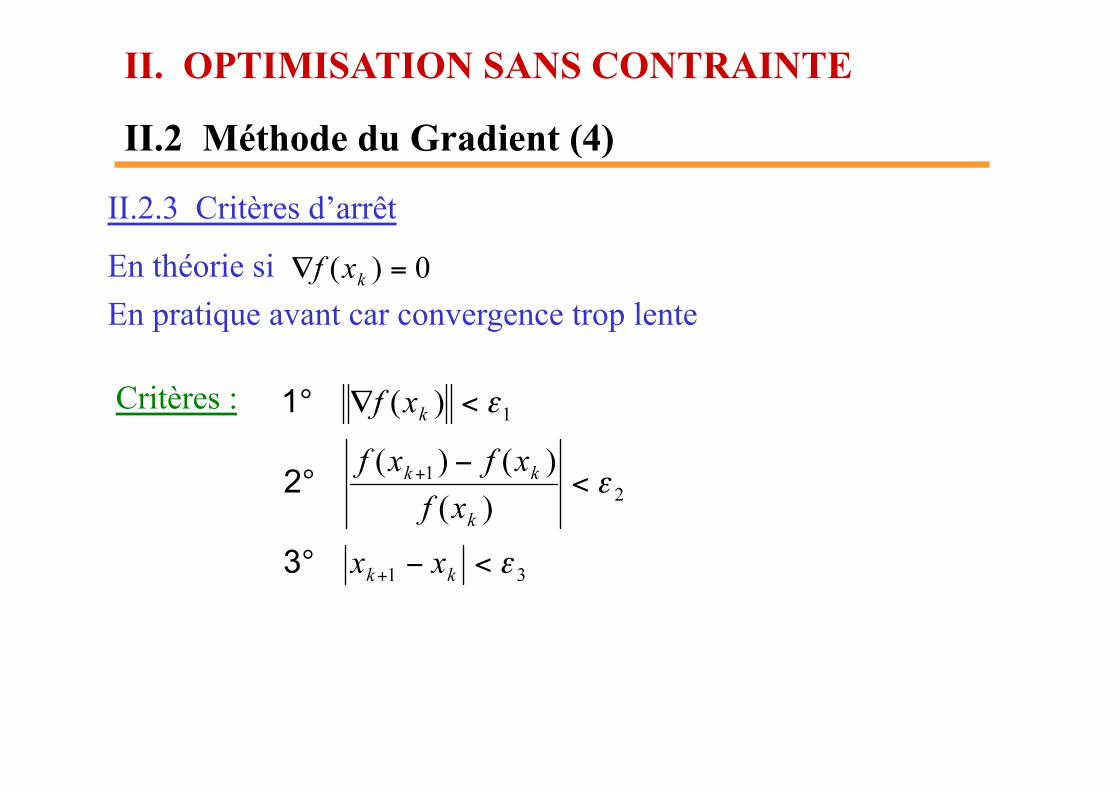
II.2.3 Critères d’arrêt
En théorie si En pratique avant car convergence trop lente
Critères :
II.2 Méthode du Gradient (5)
II. OPTIMISATION SANS CONTRAINTE
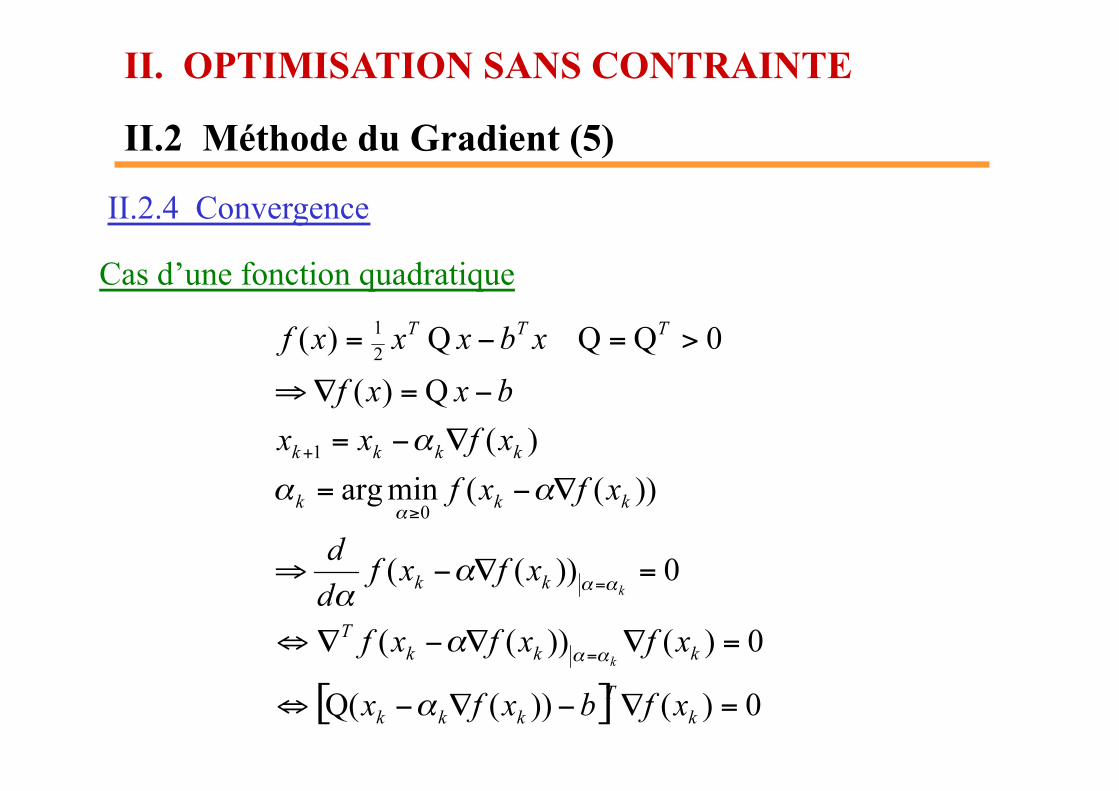
II.2.4 Convergence
Cas d’une fonction quadratique
II.2 Méthode du Gradient (6)
II. OPTIMISATION SANS CONTRAINTE
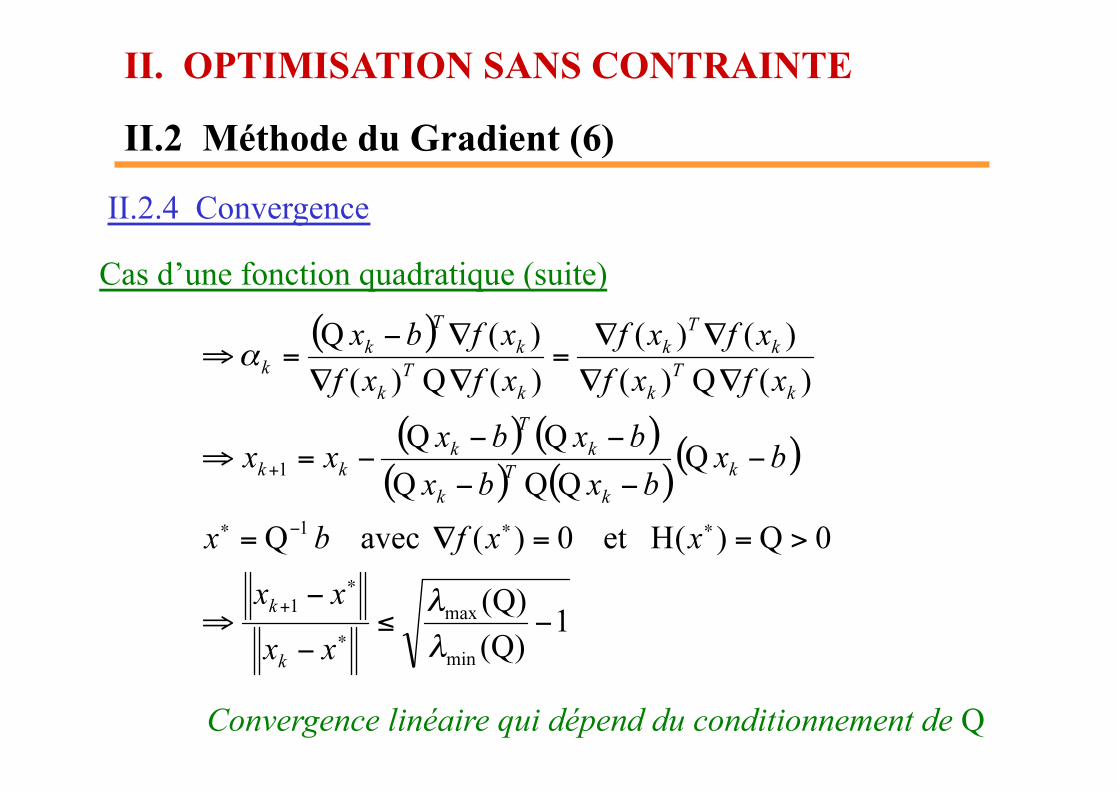
II.2.4 Convergence
Cas d’une fonction quadratique (suite)
Convergence linéaire qui dépend du conditionnement de Q
II.2 Méthode du Gradient (7)
II. OPTIMISATION SANS CONTRAINTE
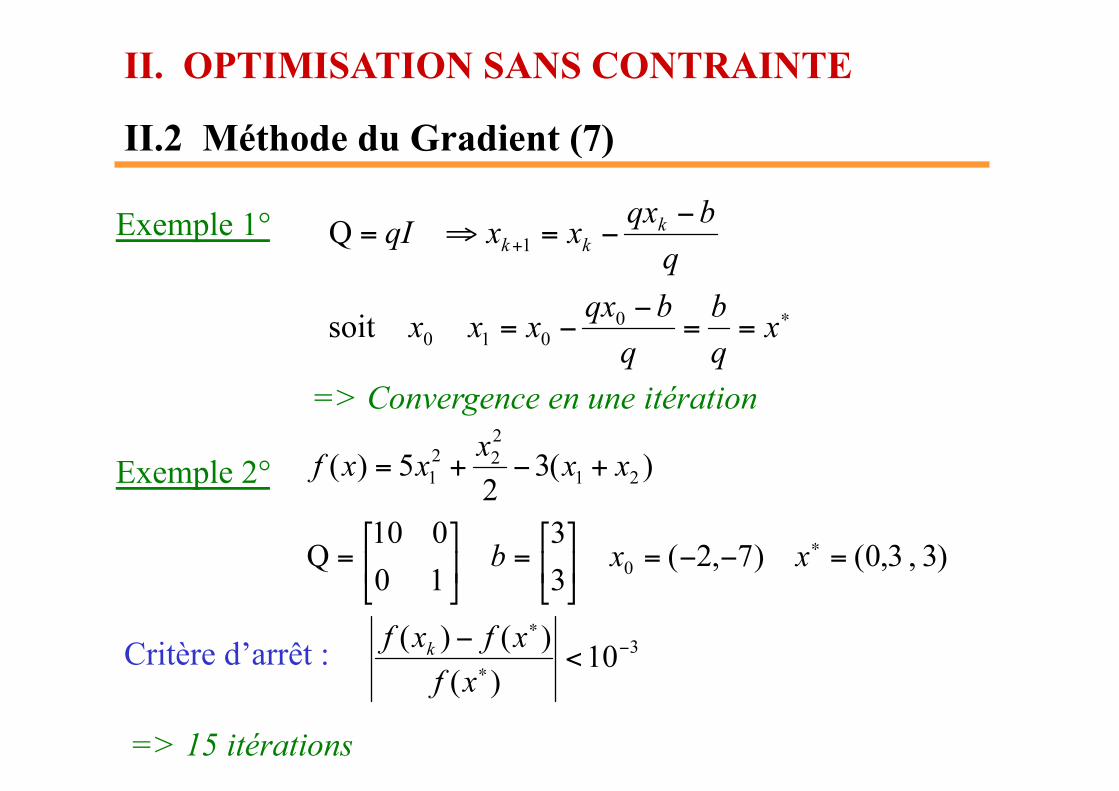
Exemple 1°
=> Convergence en une itération
Exemple 2°
=> 15 itérations
Critère d’arrêt :
II.2 Méthode du Gradient (8)
II. OPTIMISATION SANS CONTRAINTE
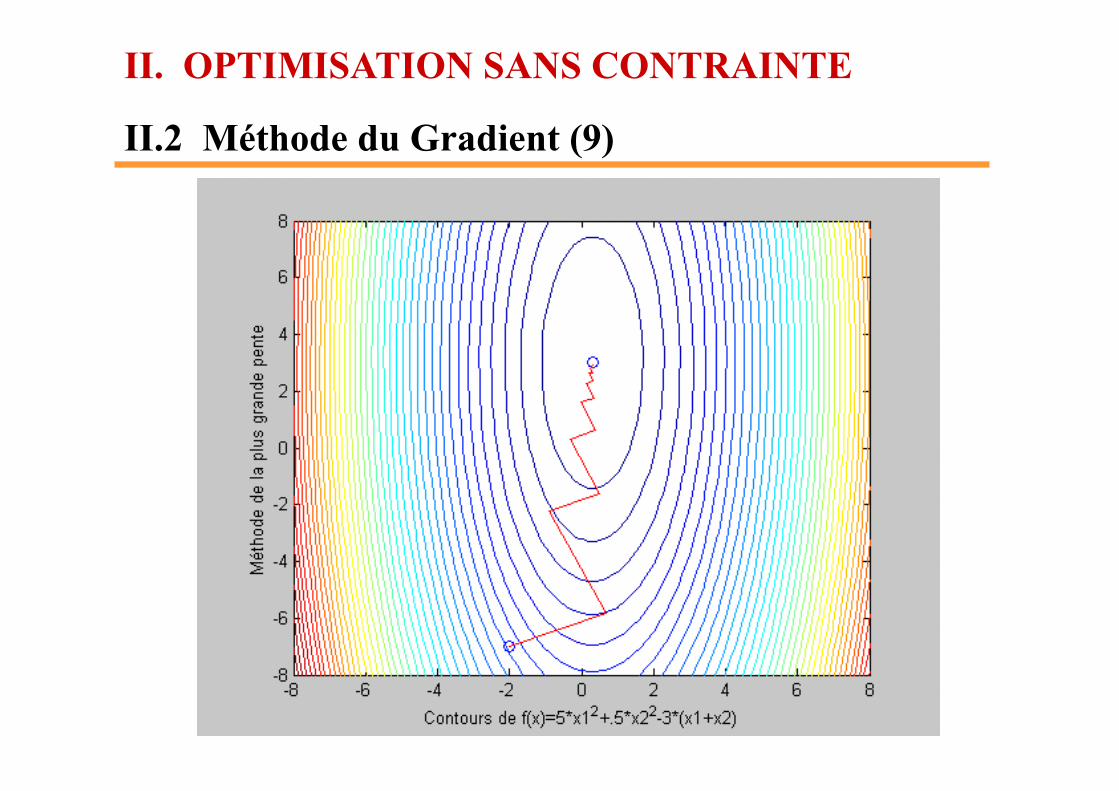
II.2 Méthode du Gradient (9)
II. OPTIMISATION SANS CONTRAINTE
II.2 Méthode du Gradient (10)
II. OPTIMISATION SANS CONTRAINTE
Exemple 3°
=> 4 itérations Avec le même critère d’arrêt
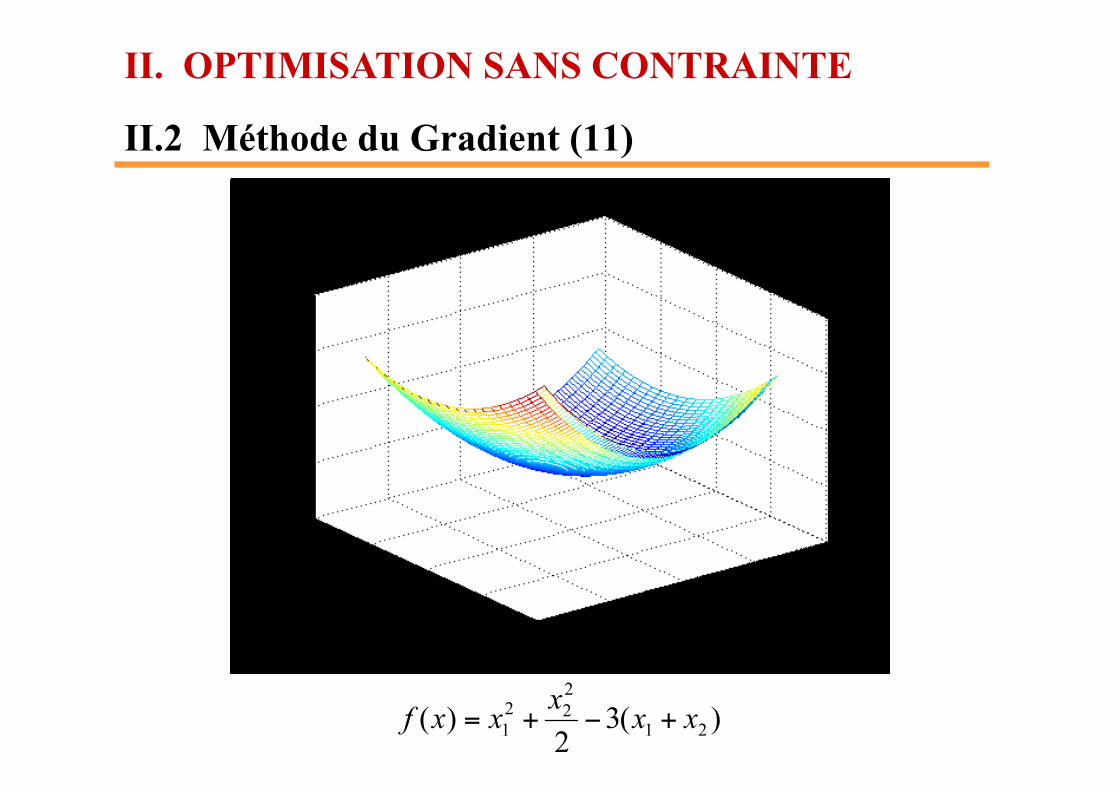
II.2 Méthode du Gradient (11)
II. OPTIMISATION SANS CONTRAINTE
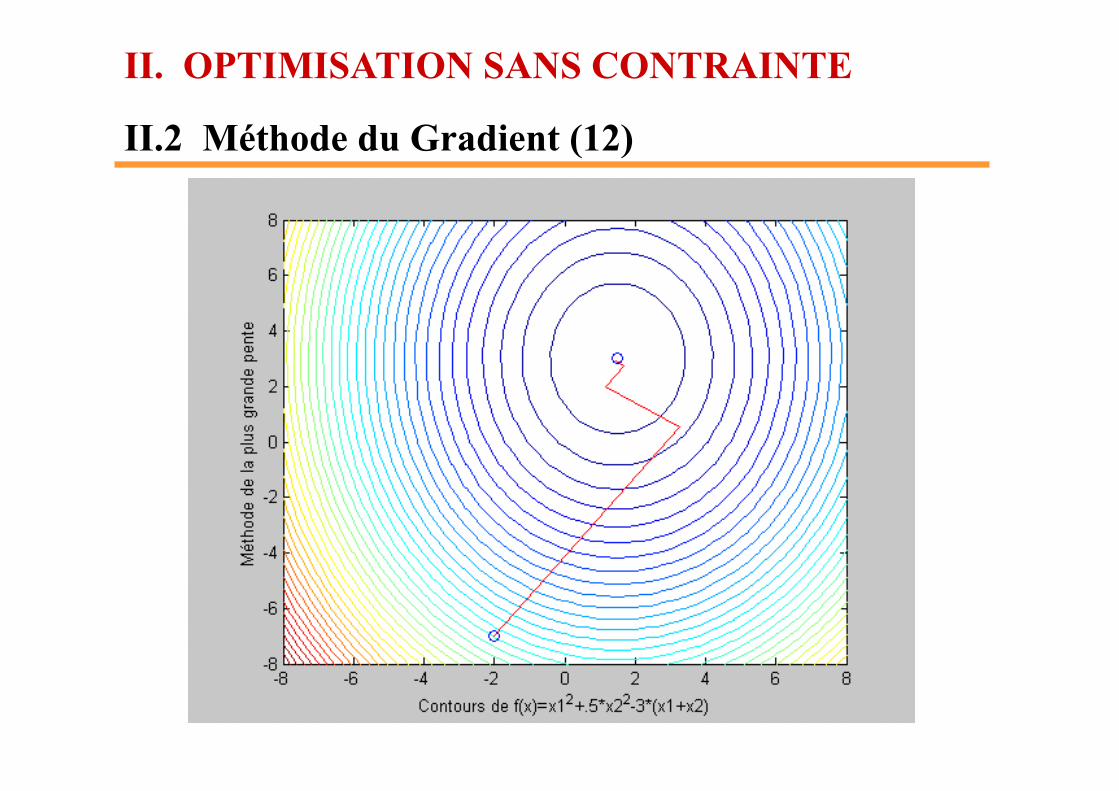
II.2 Méthode du Gradient (12)
II. OPTIMISATION SANS CONTRAINTE
II.3 Méthode des directions conjuguées (1)
II. OPTIMISATION SANS CONTRAINTE
• Résout les problèmes quadratiques en n itérations • Convergence plus rapide que le gradient
Définition : Directions Q-conjuguées
Soit Les directions sont Q-conjuguées si
et linéairement indépendantes si Q > 0
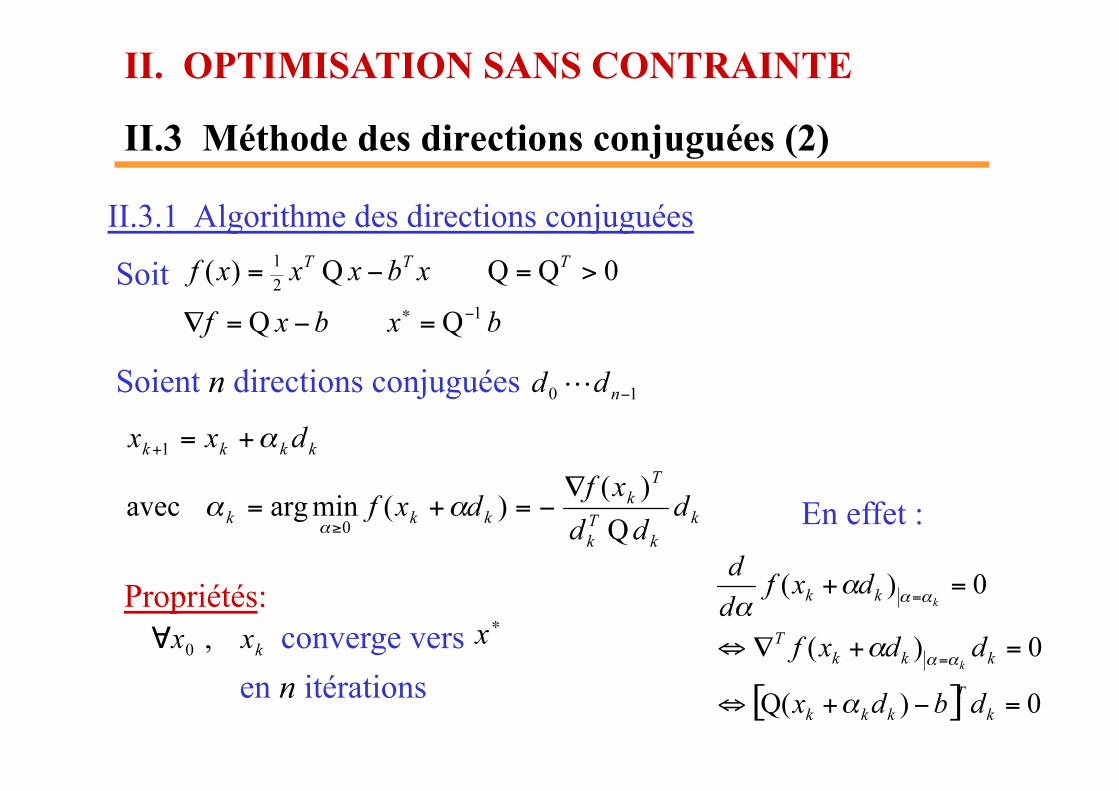
II.3 Méthode des directions conjuguées (2)
II. OPTIMISATION SANS CONTRAINTE
II.3.1 Algorithme des directions conjuguées
Soit
Soient n directions conjuguées
Propriétés: converge vers
en n itérations
En effet :
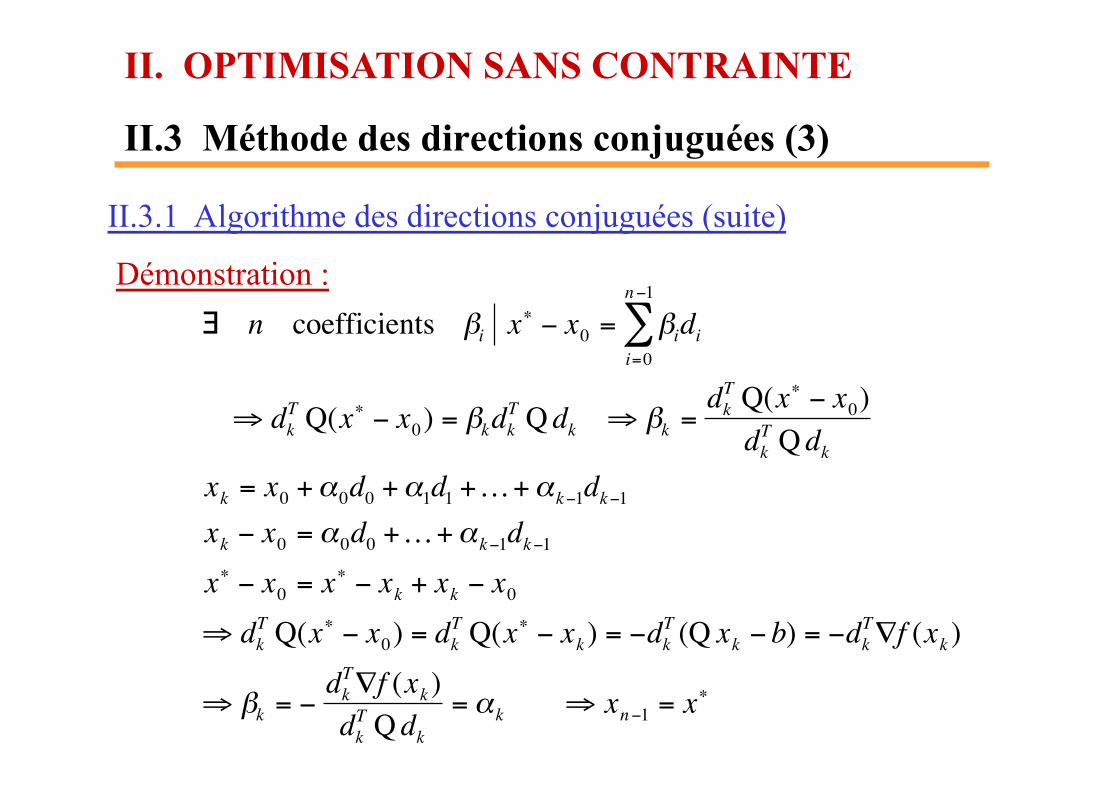
II.3 Méthode des directions conjuguées (3)
II. OPTIMISATION SANS CONTRAINTE
II.3.1 Algorithme des directions conjuguées (suite)
Démonstration :
€
∃ n coefficients βi x∗ − x0 = βidii=0
n−1
∑
⇒ dkT Q(x∗ − x0) = βkdk
T Q dk ⇒ βk =dkT Q(x∗ − x0)dkT Q dk
xk = x0 +α0d0 +α1d1 +…+αk−1dk−1xk − x0 = α0d0 +…+αk−1dk−1x∗ − x0 = x∗ − xk + xk − x0⇒ dk
T Q(x∗ − x0) = dkT Q(x∗ − xk ) = −dk
T (Q xk − b) = −dkT∇f (xk )
⇒ βk = −dkT∇f (xk )dkT Q dk
= αk ⇒ xn−1 = x∗
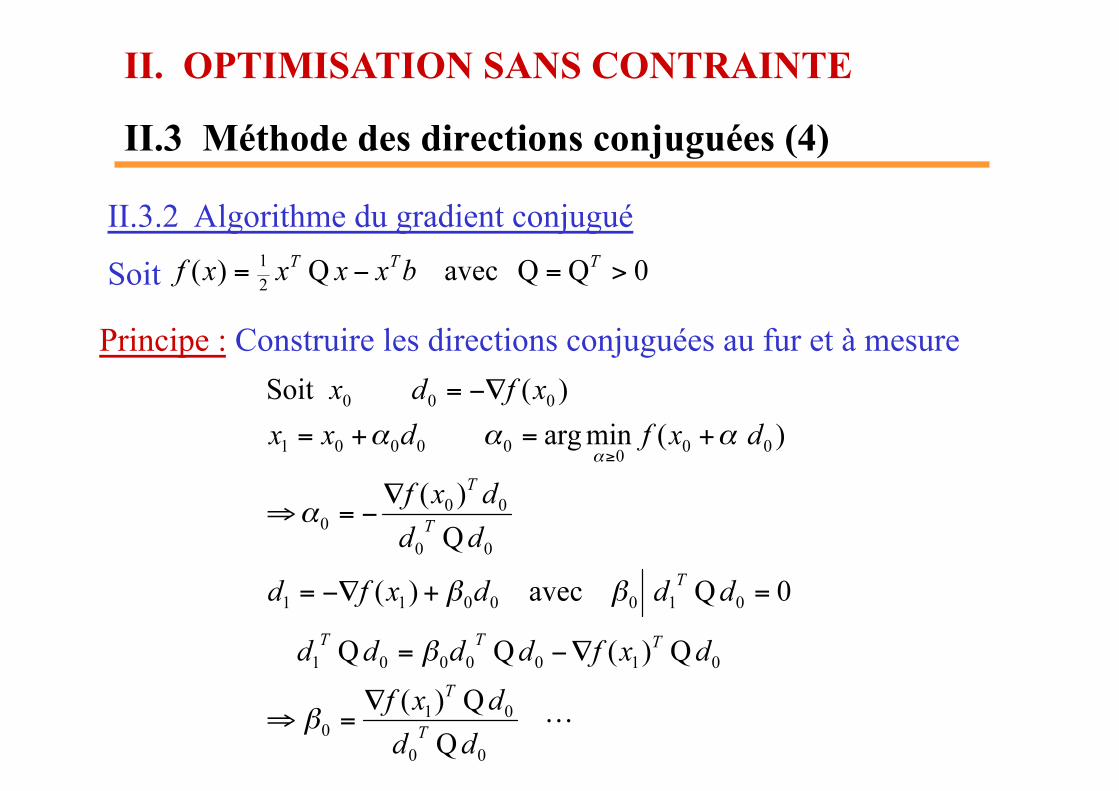
II.3 Méthode des directions conjuguées (4)
II. OPTIMISATION SANS CONTRAINTE
II.3.2 Algorithme du gradient conjugué
Soit
Principe : Construire les directions conjuguées au fur et à mesure
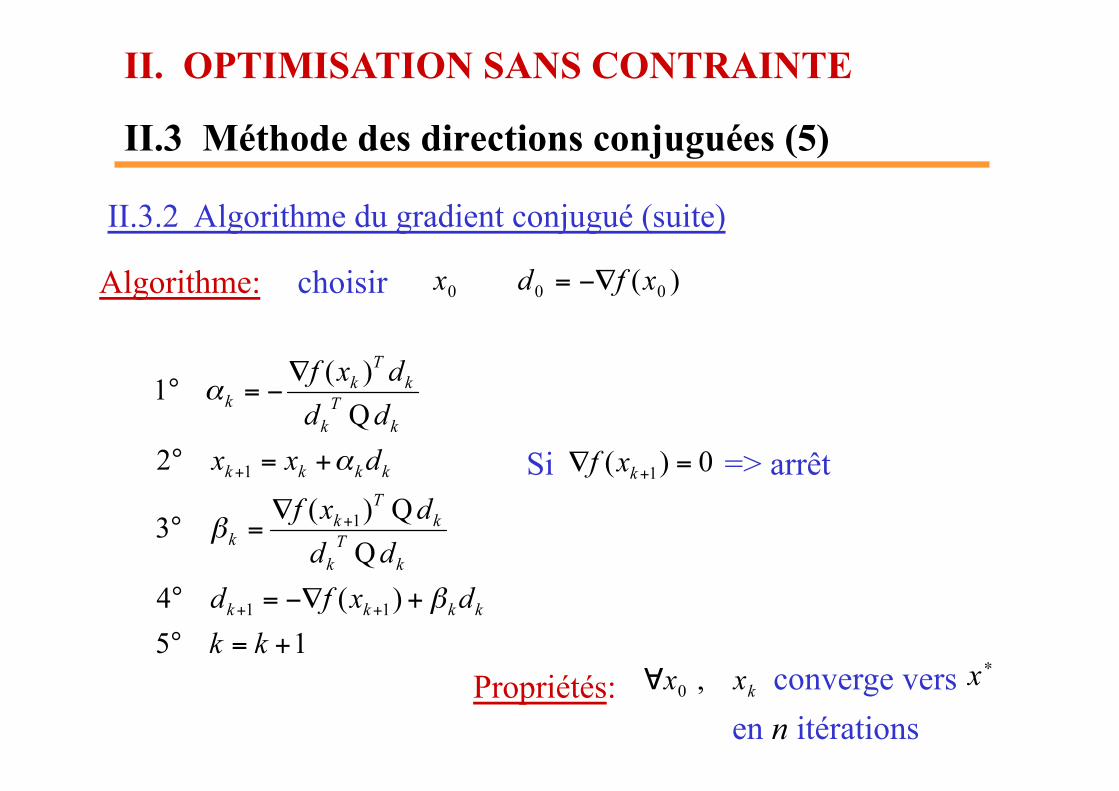
II.3 Méthode des directions conjuguées (5)
II. OPTIMISATION SANS CONTRAINTE
II.3.2 Algorithme du gradient conjugué (suite)
Algorithme: choisir
Si => arrêt
Propriétés: converge vers en n itérations
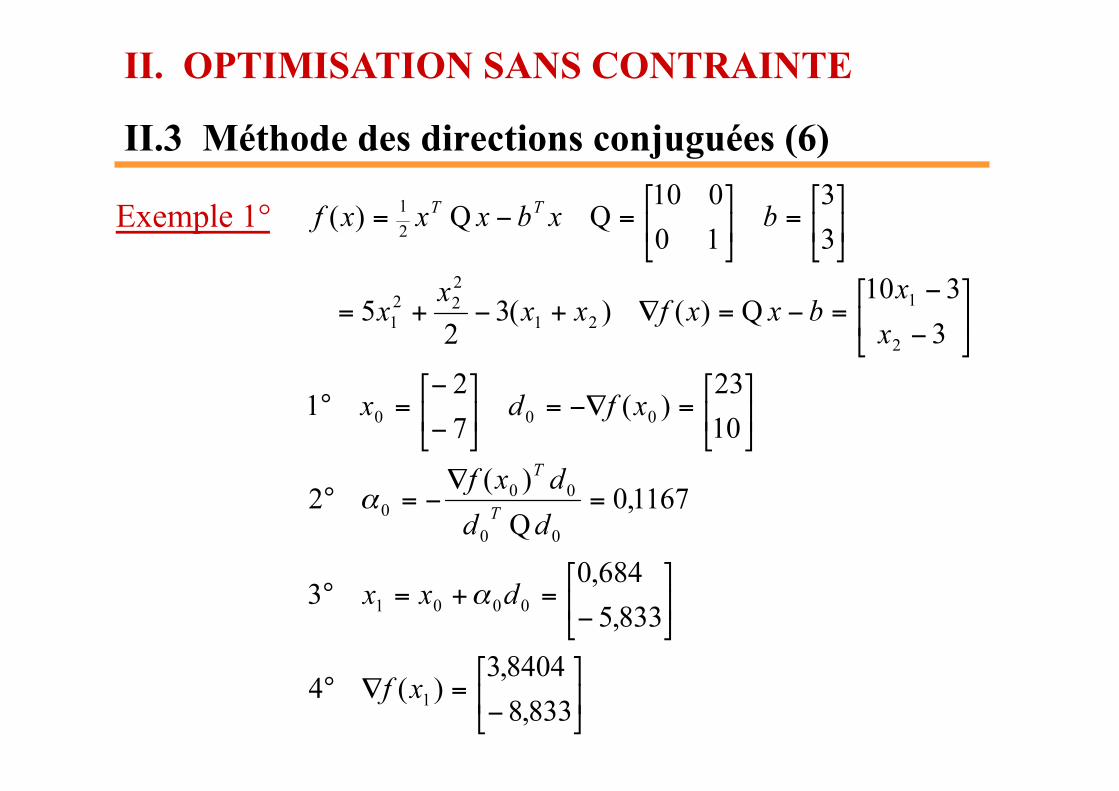
II.3 Méthode des directions conjuguées (6)
II. OPTIMISATION SANS CONTRAINTE
Exemple 1°
II.3 Méthode des directions conjuguées (7)
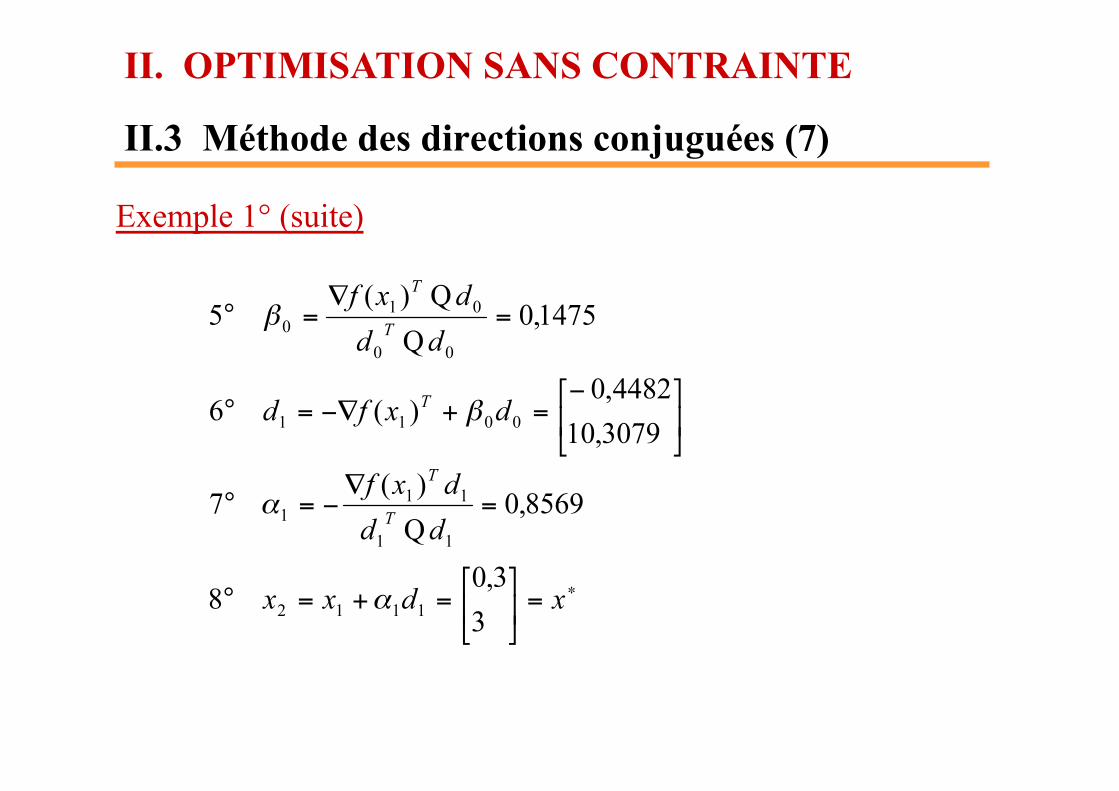
II. OPTIMISATION SANS CONTRAINTE
Exemple 1° (suite)
II.2 Méthode des directions conjuguées (8)
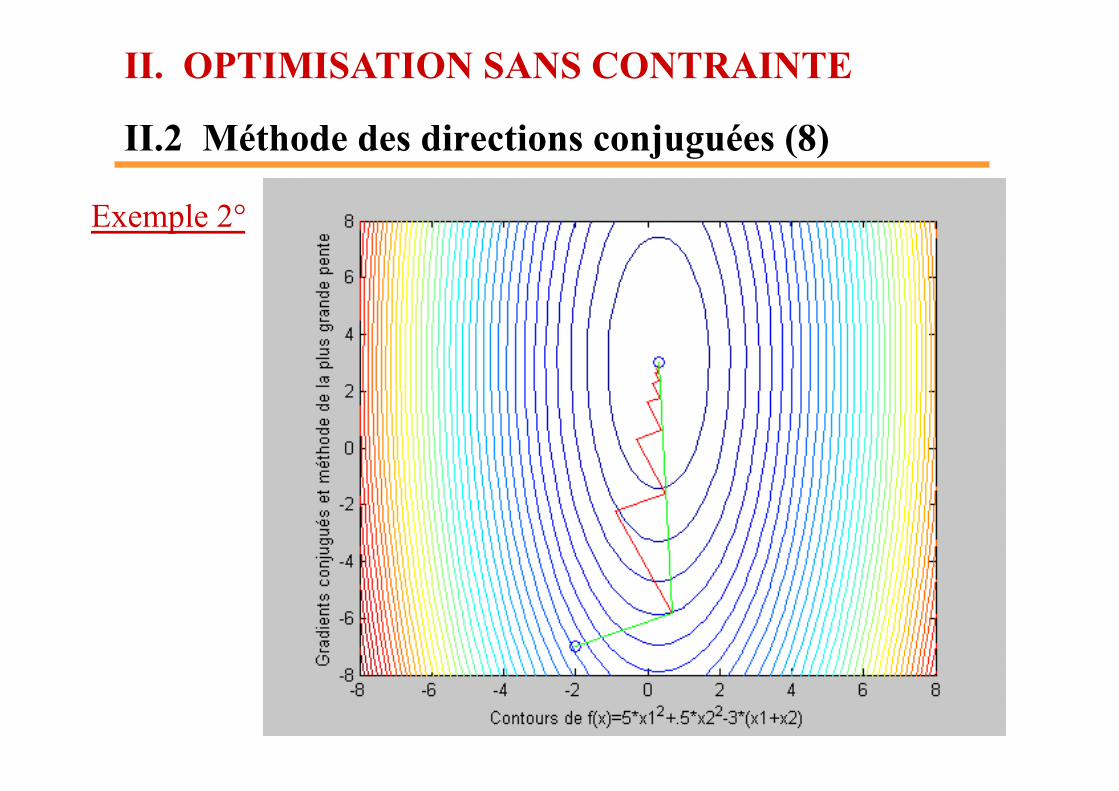
II. OPTIMISATION SANS CONTRAINTE
Exemple 2°
II.3 Méthode des directions conjuguées (9)
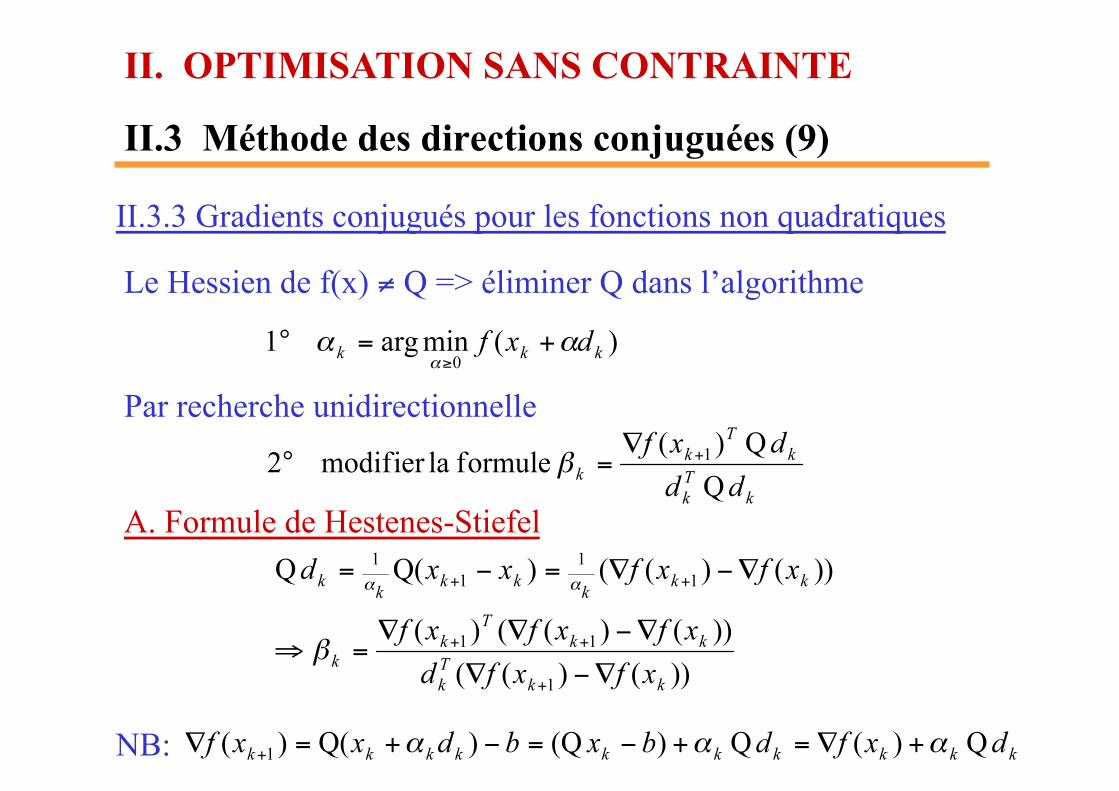
II. OPTIMISATION SANS CONTRAINTE
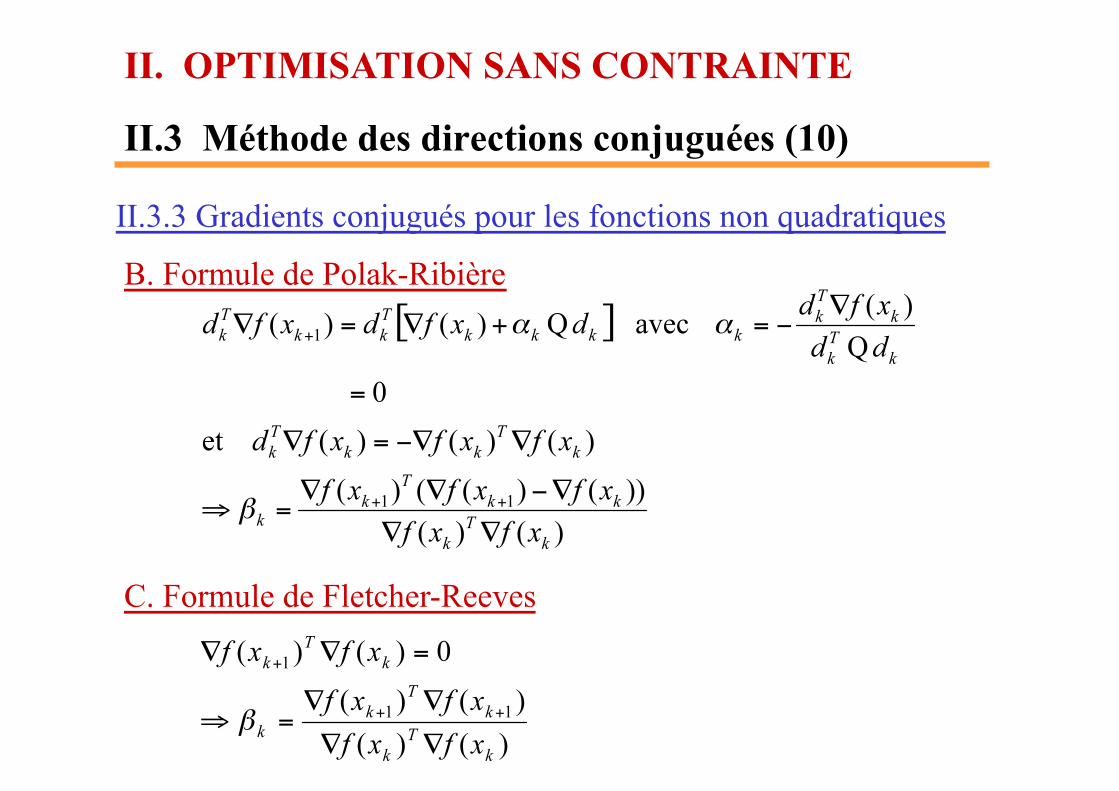
II.3.3 Gradients conjugués pour les fonctions non quadratiques
Le Hessien de f(x) ≠ Q => éliminer Q dans l’algorithme
Par recherche unidirectionnelle
A. Formule de Hestenes-Stiefel
NB:
II.3 Méthode des directions conjuguées (10)
II. OPTIMISATION SANS CONTRAINTE
II.3.3 Gradients conjugués pour les fonctions non quadratiques
C. Formule de Fletcher-Reeves
B. Formule de Polak-Ribière
II.3 Méthode des directions conjuguées (11)
II. OPTIMISATION SANS CONTRAINTE
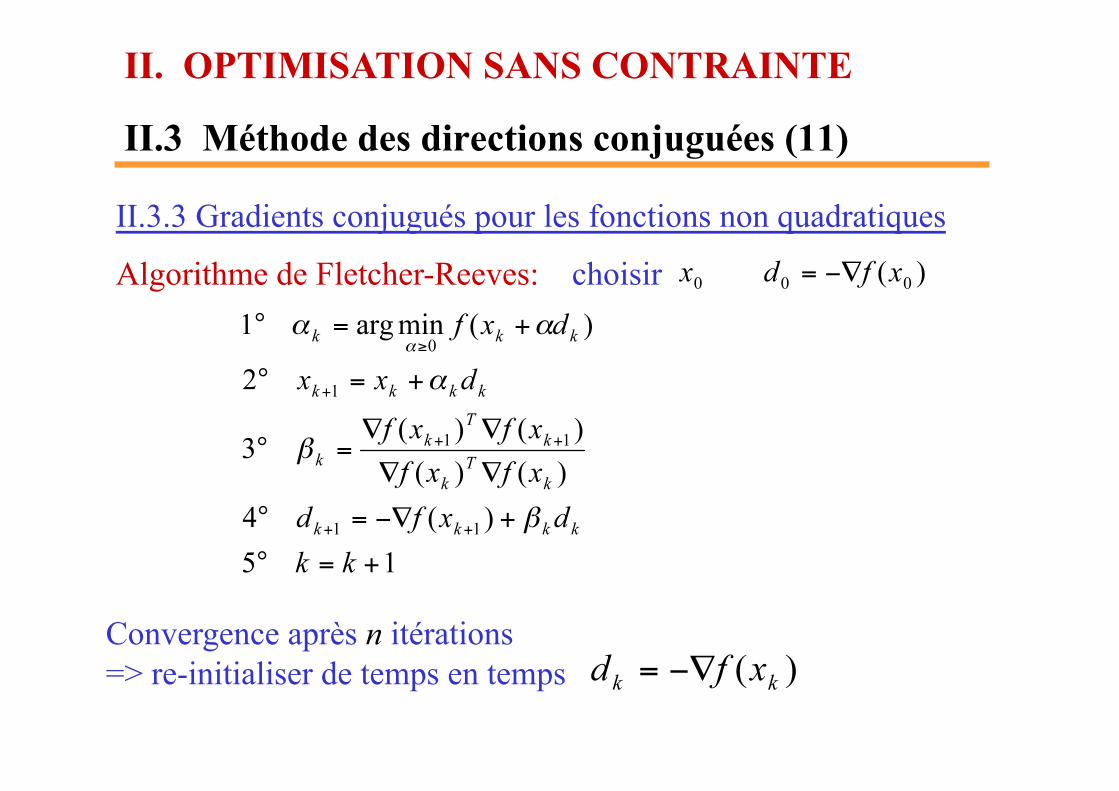
II.3.3 Gradients conjugués pour les fonctions non quadratiques
Algorithme de Fletcher-Reeves: choisir
Convergence après n itérations => re-initialiser de temps en temps
II.4 Méthode de Newton (1)
II. OPTIMISATION SANS CONTRAINTE
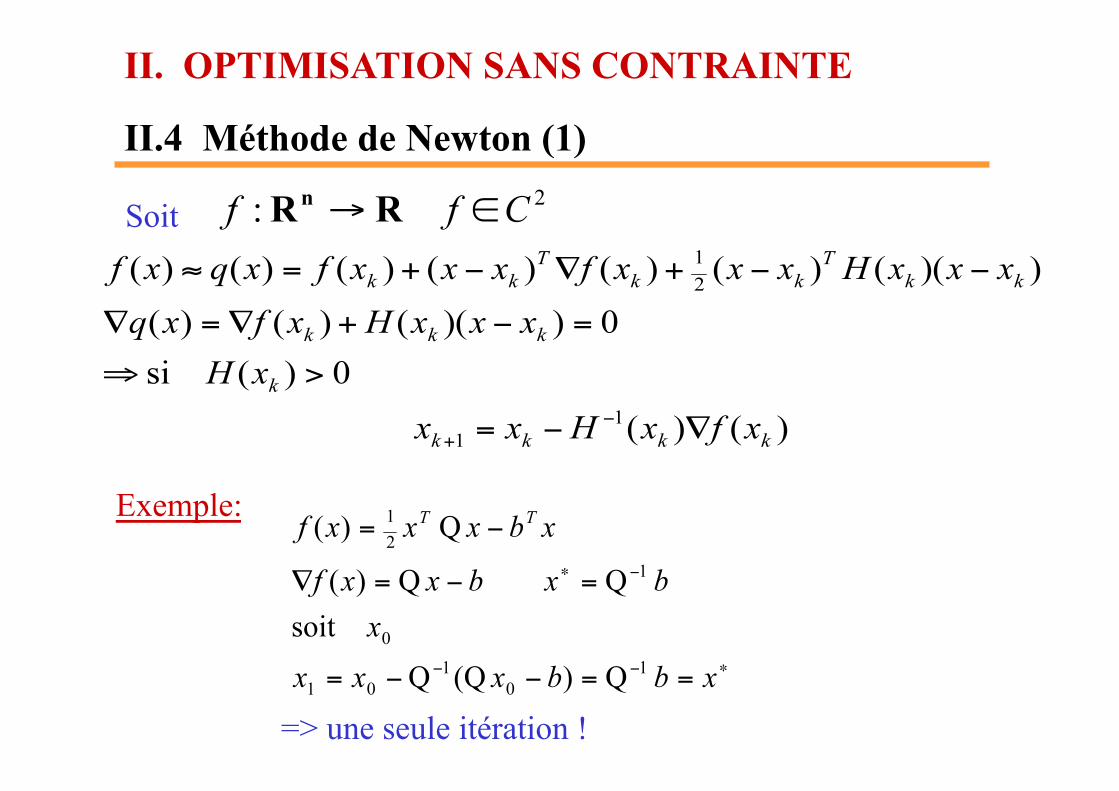
=> une seule itération !
Exemple:
Soit
II.4 Méthode de Newton (2)
II. OPTIMISATION SANS CONTRAINTE
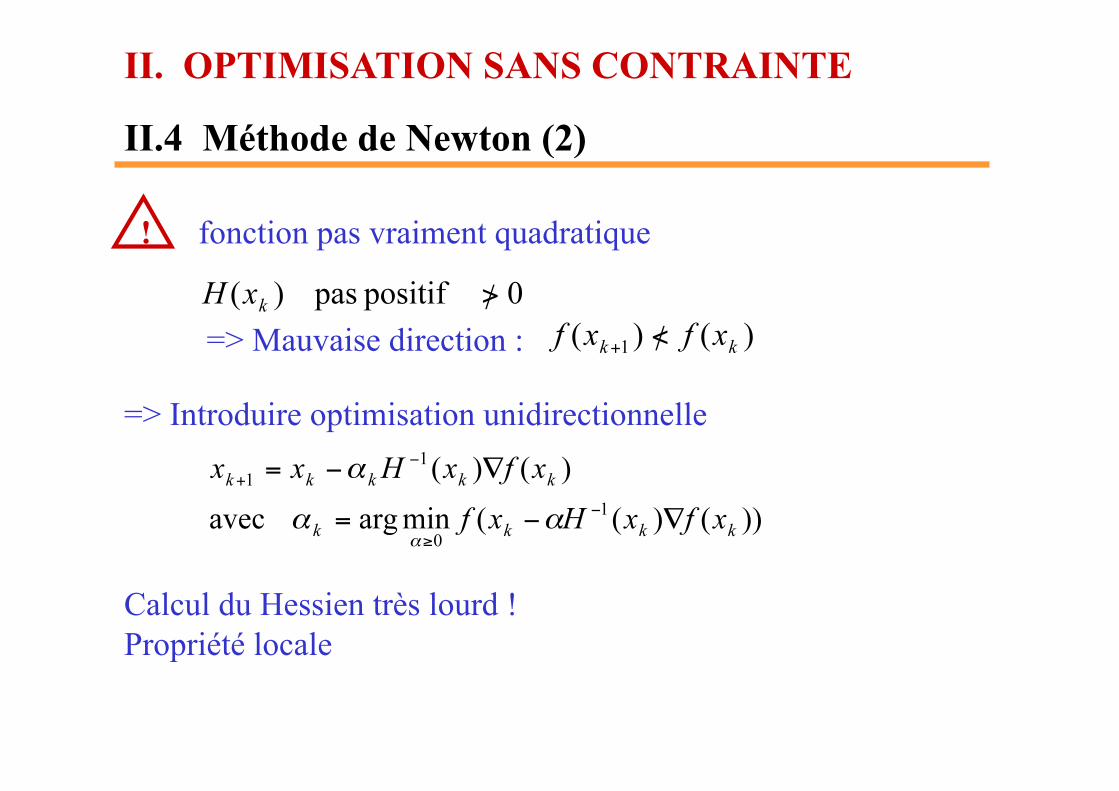
Calcul du Hessien très lourd ! Propriété locale
=> Mauvaise direction :
fonction pas vraiment quadratique
=> Introduire optimisation unidirectionnelle
!
II.5 Algorithme de Levenberg-Marquardt
II. OPTIMISATION SANS CONTRAINTE
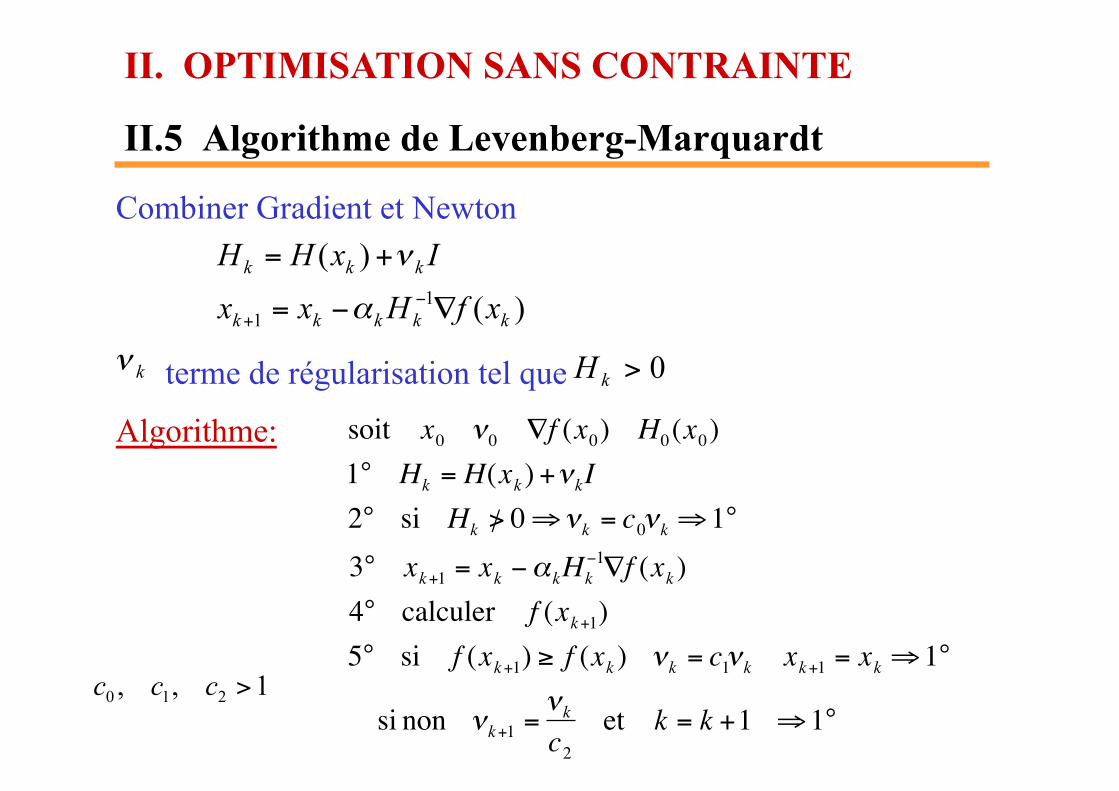
Combiner Gradient et Newton
terme de régularisation tel que
Algorithme:
€
soit x0 ν0 ∇f (x0) H0(x0)1° Hk = H(xk ) +νkI2° si Hk / > 0⇒νk = c0νk ⇒1°
3° xk+1 = xk −αkHk−1∇f (xk )
4° calculer f (xk+1)5° si f (xk+1) ≥ f (xk ) νk = c1νk xk+1 = xk ⇒1°
si non νk+1 =νkc2
et k = k +1 ⇒1°

II.6 Méthodes Quasi-Newton (1)
II. OPTIMISATION SANS CONTRAINTE
est remplacé par une approximation
Propriété
Condition quasi-Newton
II.6 Méthodes Quasi-Newton (2)
II. OPTIMISATION SANS CONTRAINTE
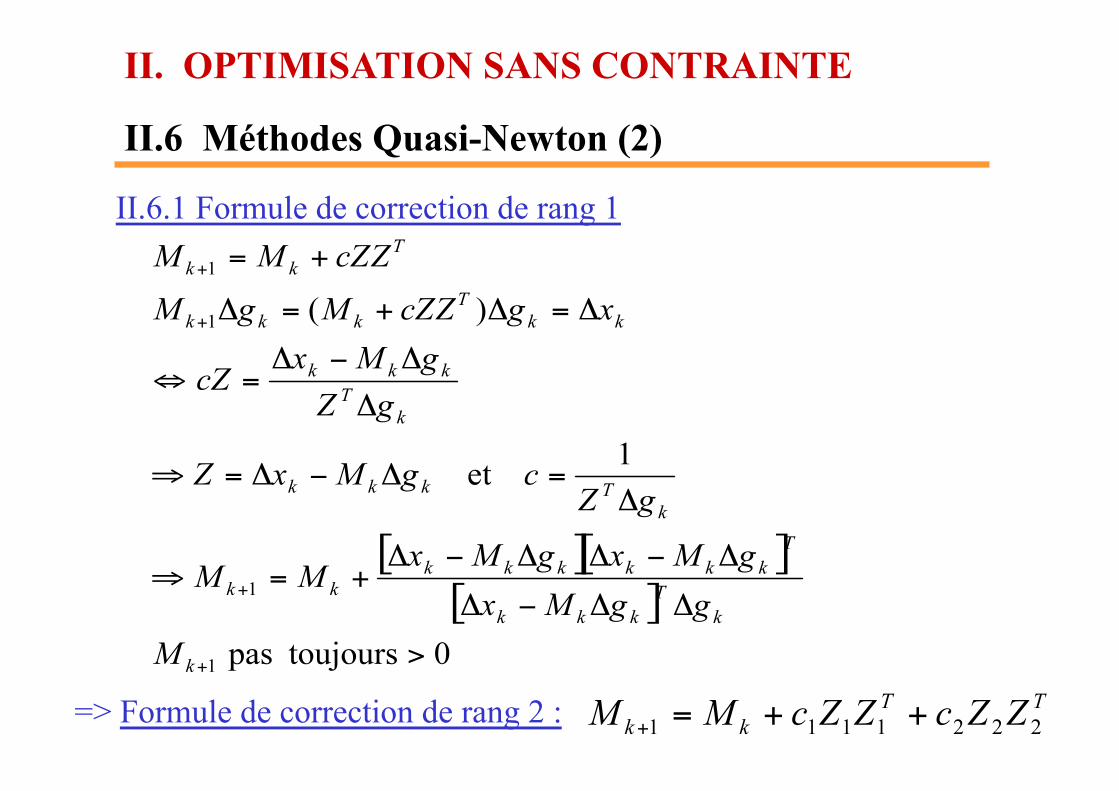
II.6.1 Formule de correction de rang 1
=> Formule de correction de rang 2 :
II.6 Méthodes Quasi-Newton (3)
II. OPTIMISATION SANS CONTRAINTE
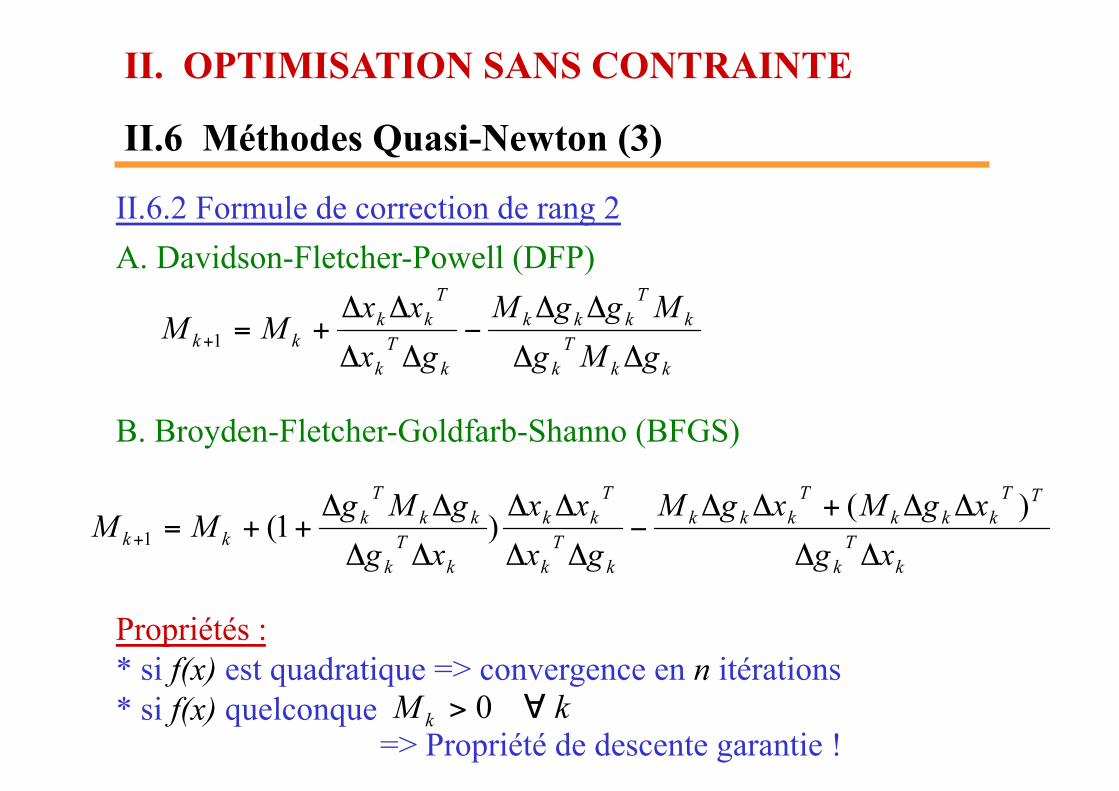
II.6.2 Formule de correction de rang 2
Propriétés : * si f(x) est quadratique => convergence en n itérations * si f(x) quelconque
A. Davidson-Fletcher-Powell (DFP)
B. Broyden-Fletcher-Goldfarb-Shanno (BFGS)
=> Propriété de descente garantie !
II.7 Méthodes sans calcul du gradient (1)
II. OPTIMISATION SANS CONTRAINTE
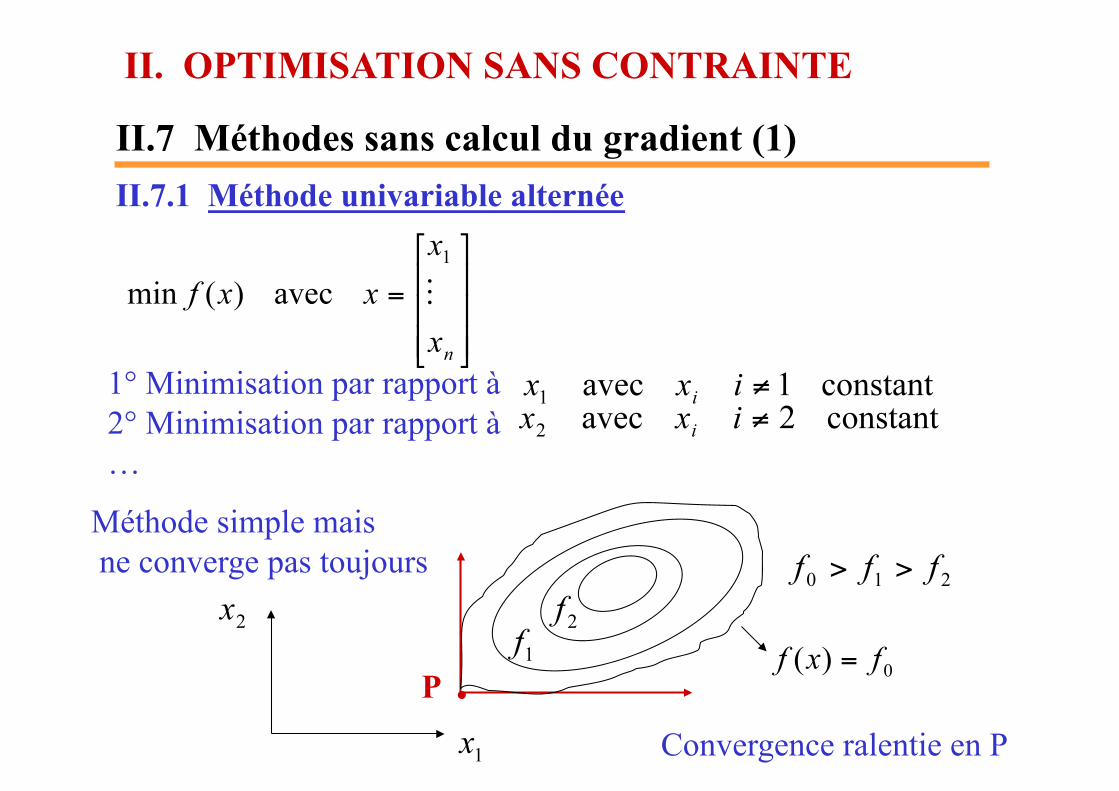
1° Minimisation par rapport à 2° Minimisation par rapport à …
Méthode simple mais ne converge pas toujours
• P
Convergence ralentie en P
II.7.1 Méthode univariable alternée
II.7 Méthode sans calcul du gradient (2)
II. OPTIMISATION SANS CONTRAINTE
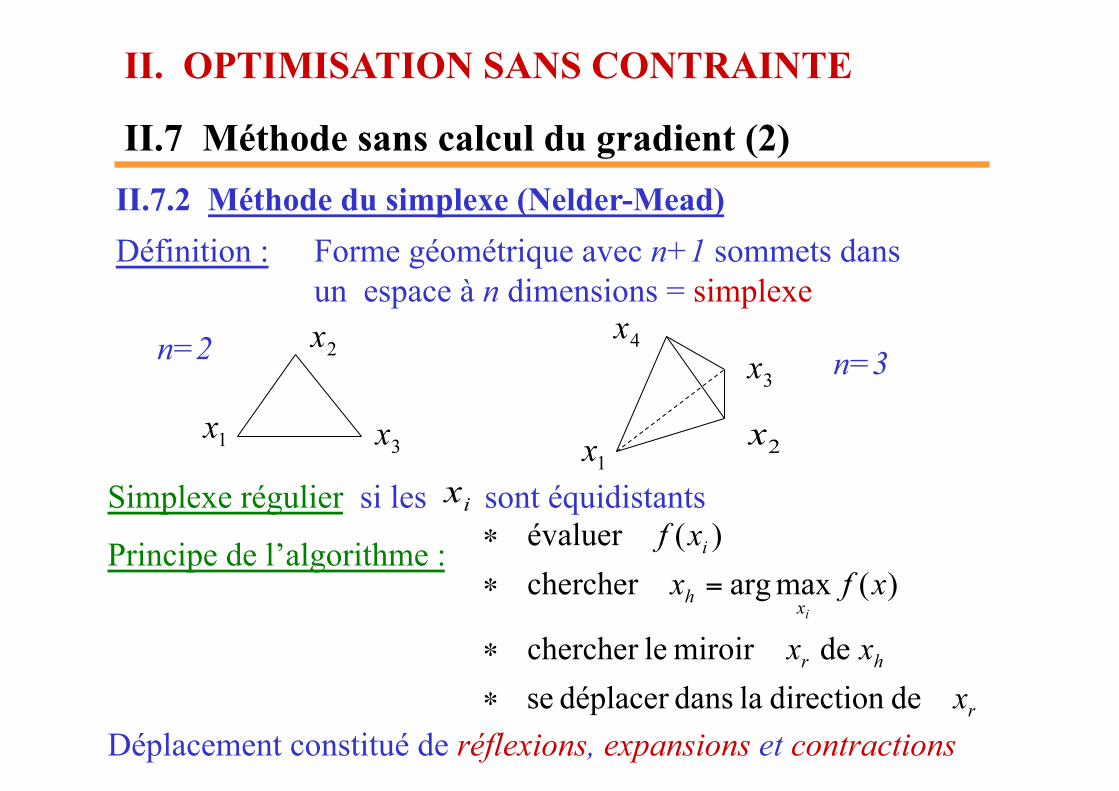
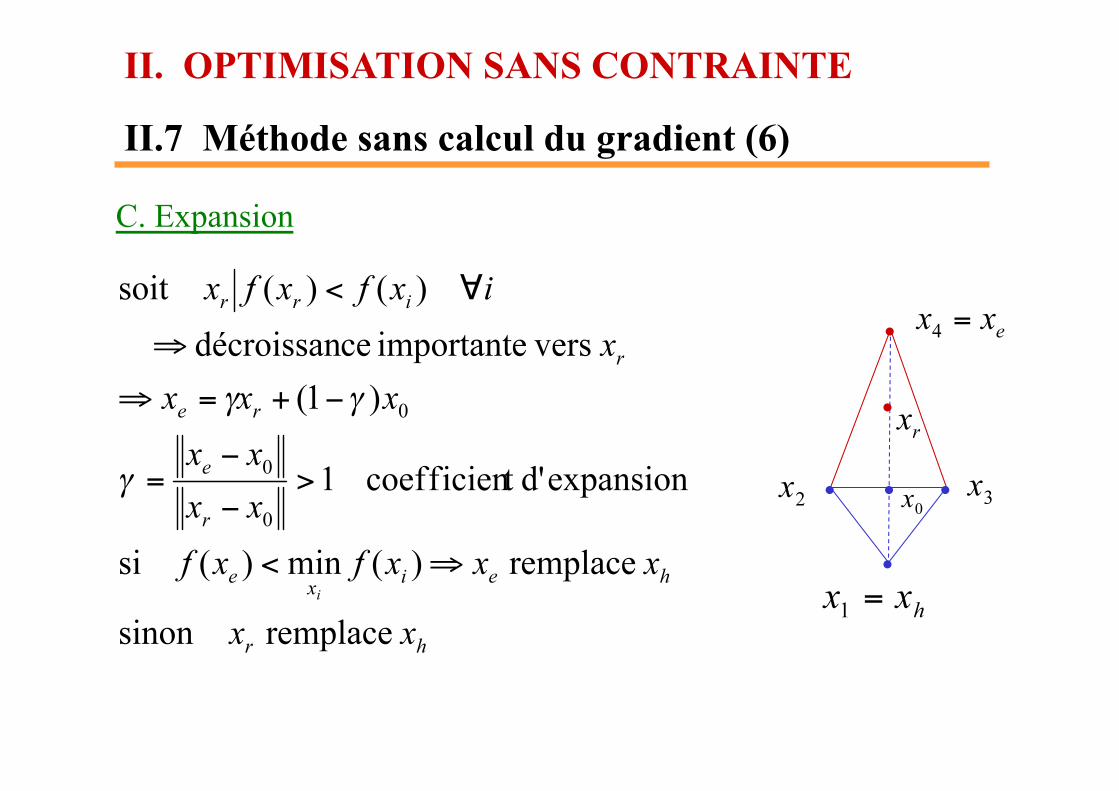
Définition : Forme géométrique avec n+1 sommets dans un espace à n dimensions = simplexe
Simplexe régulier si les sont équidistants
n=2 n=3
Principe de l’algorithme :
Déplacement constitué de réflexions, expansions et contractions
II.7.2 Méthode du simplexe (Nelder-Mead)
II.7 Méthode sans calcul du gradient (3)
II. OPTIMISATION SANS CONTRAINTE
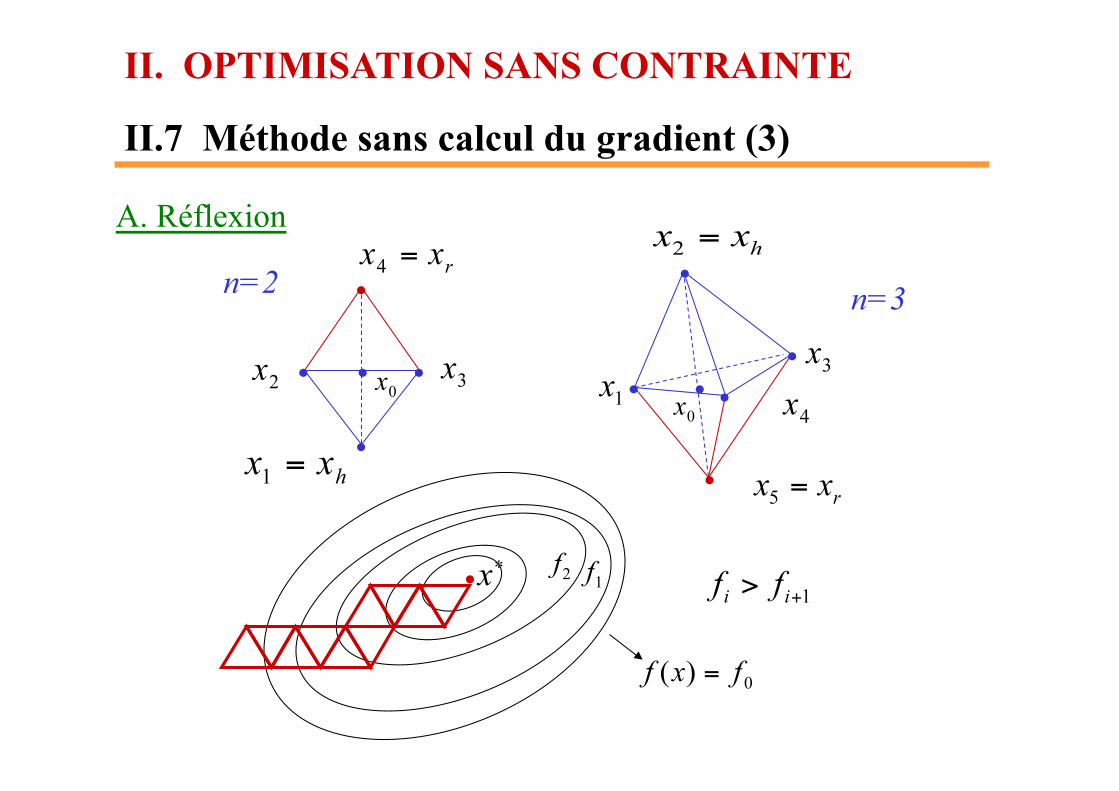
A. Réflexion
n=2 n=3
• •
•
•
•
• •
•
• •
•
•
II.7 Méthode sans calcul du gradient (4)
II. OPTIMISATION SANS CONTRAINTE
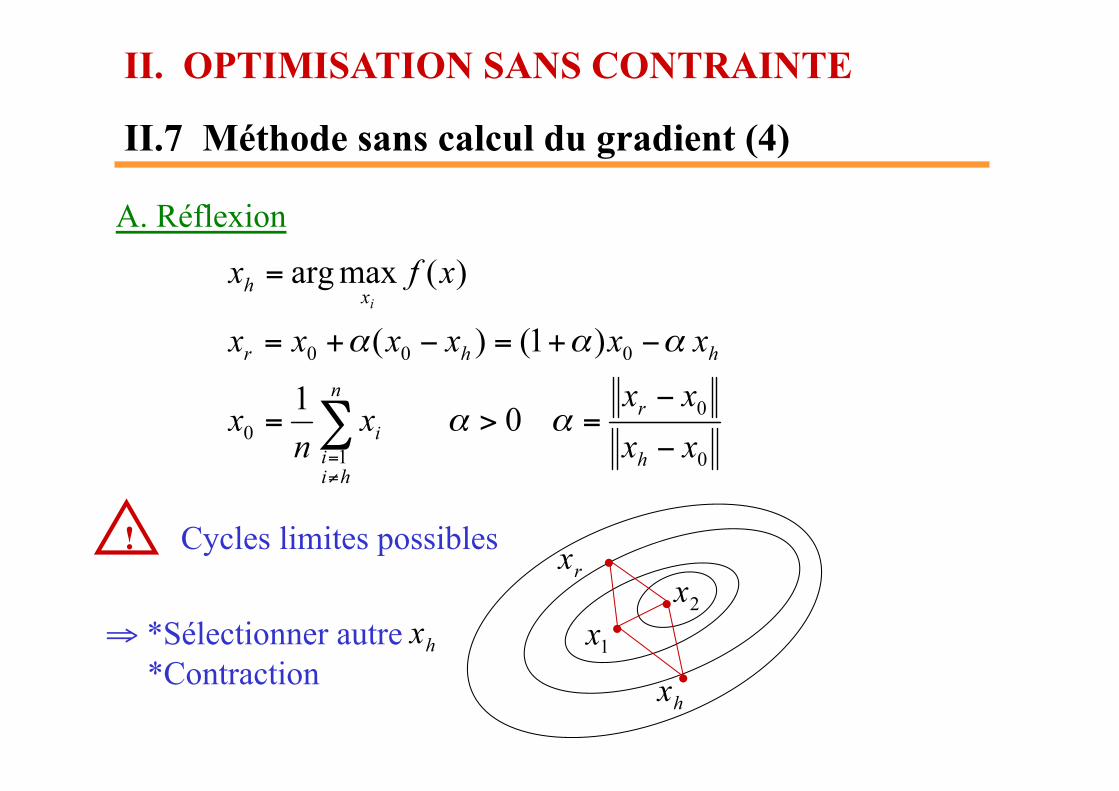
A. Réflexion
Cycles limites possibles
⇒ *Sélectionner autre *Contraction
•
•
•
•
!
II.7 Méthode sans calcul du gradient (5)
II. OPTIMISATION SANS CONTRAINTE
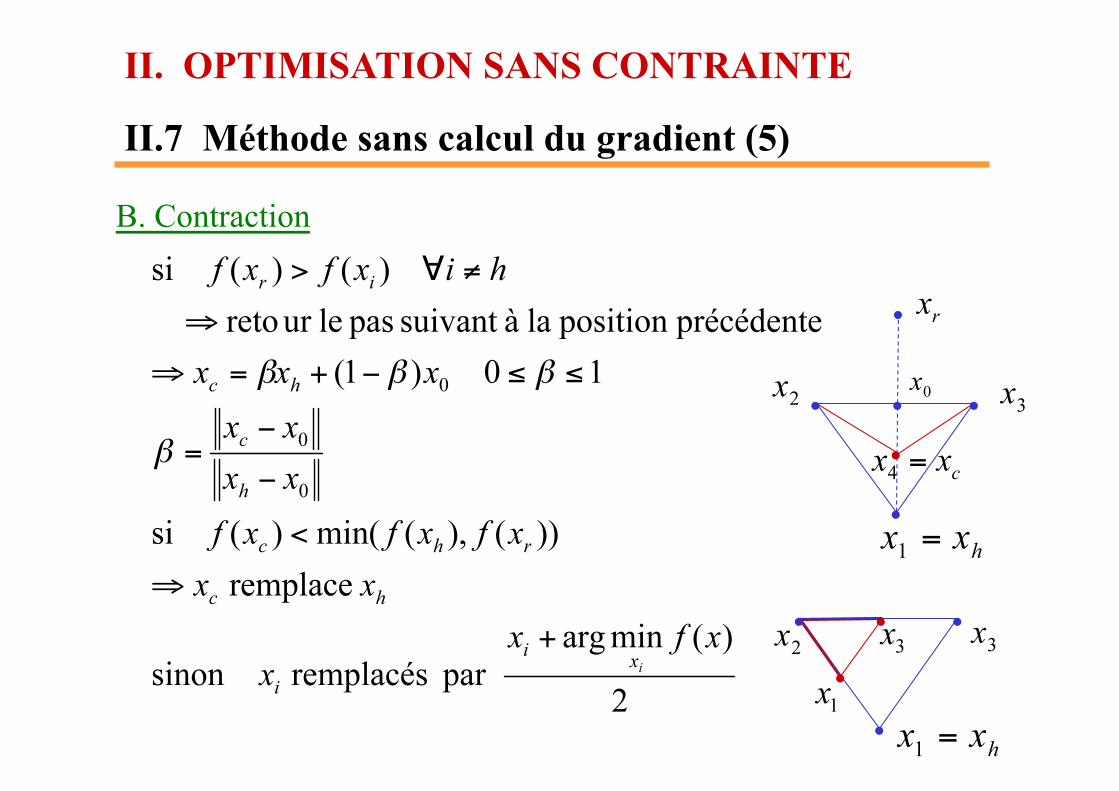
B. Contraction
• •
•
• •
•
• •
• •
•
II.7 Méthode sans calcul du gradient (6)
II. OPTIMISATION SANS CONTRAINTE
C. Expansion
• •
•
•
•
•
II.8 Sommes de carrés – Equations non linéaires (1)
II. OPTIMISATION SANS CONTRAINTE
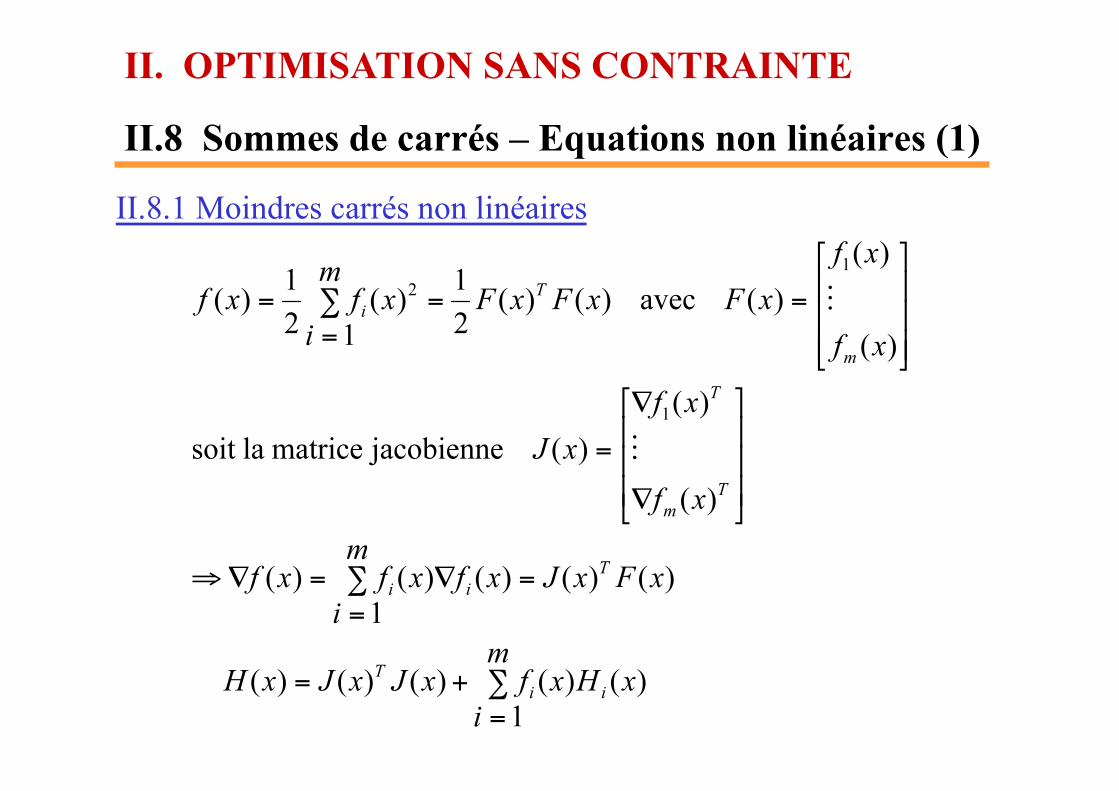
II.8.1 Moindres carrés non linéaires
II.8 Sommes de carrés – Equations non linéaires (2)
II. OPTIMISATION SANS CONTRAINTE
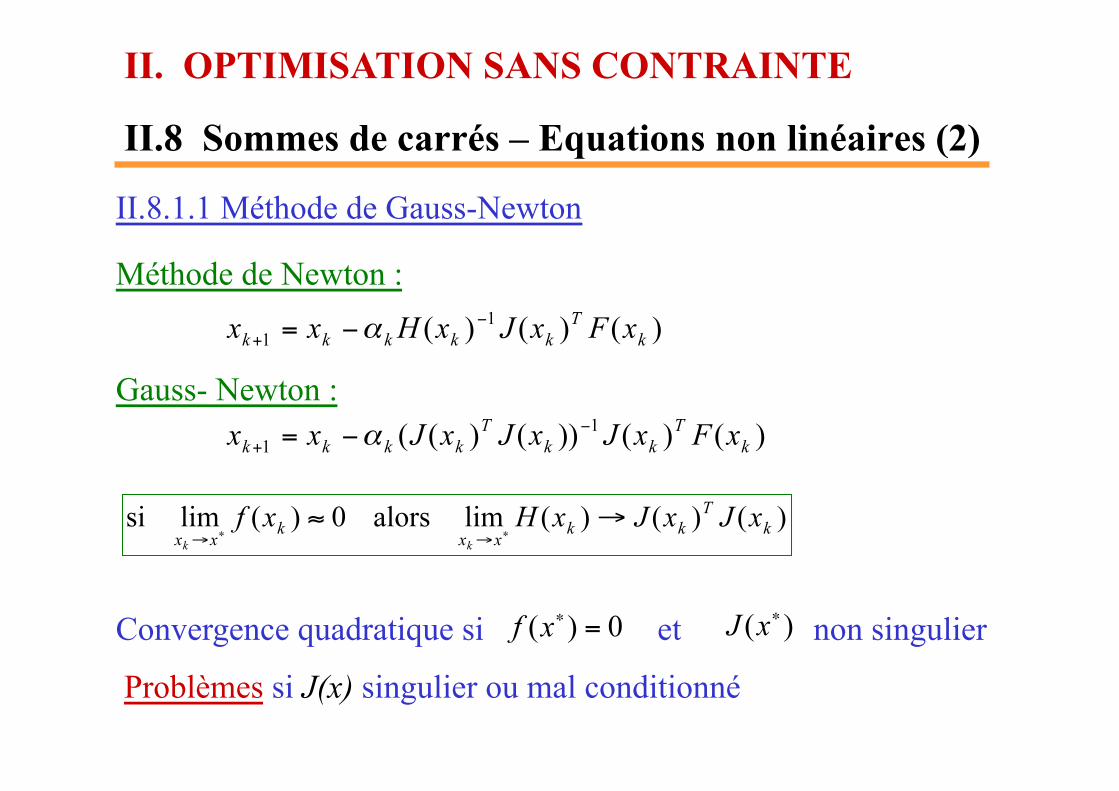
II.8.1.1 Méthode de Gauss-Newton
Méthode de Newton :
Gauss- Newton :
Convergence quadratique si et non singulier
Problèmes si J(x) singulier ou mal conditionné
II.8 Sommes de carrés – Equations non linéaires (3)
II. OPTIMISATION SANS CONTRAINTE
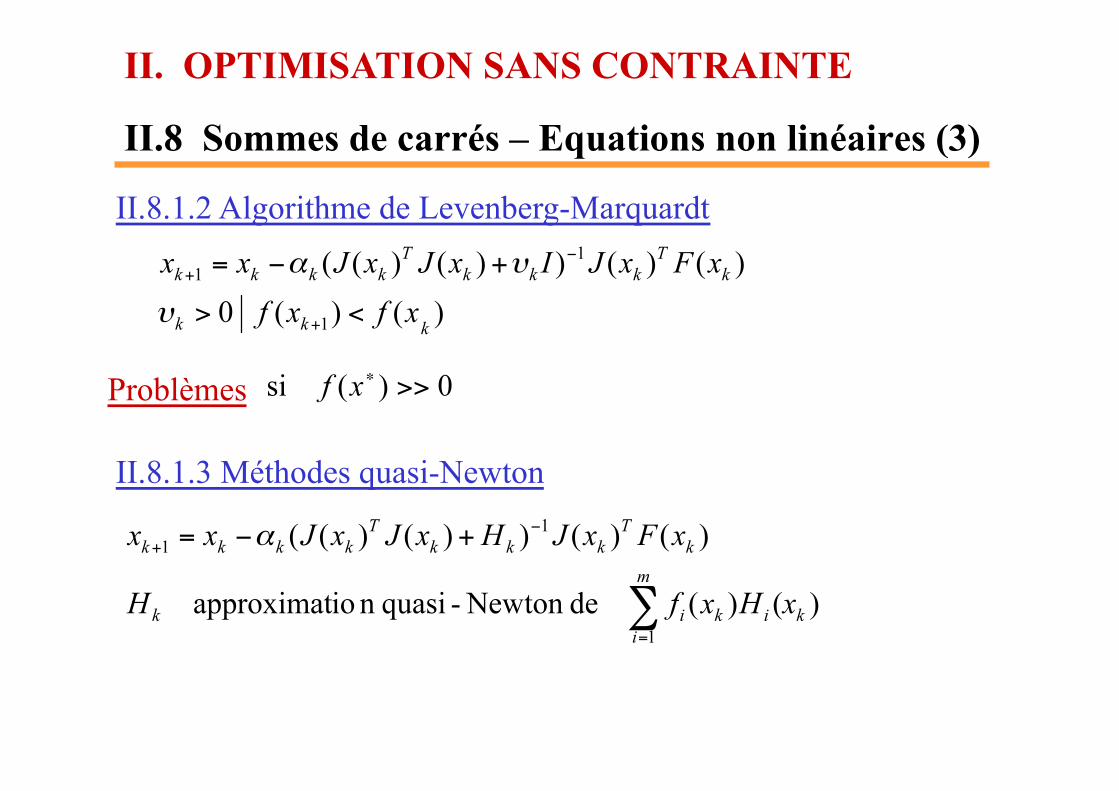
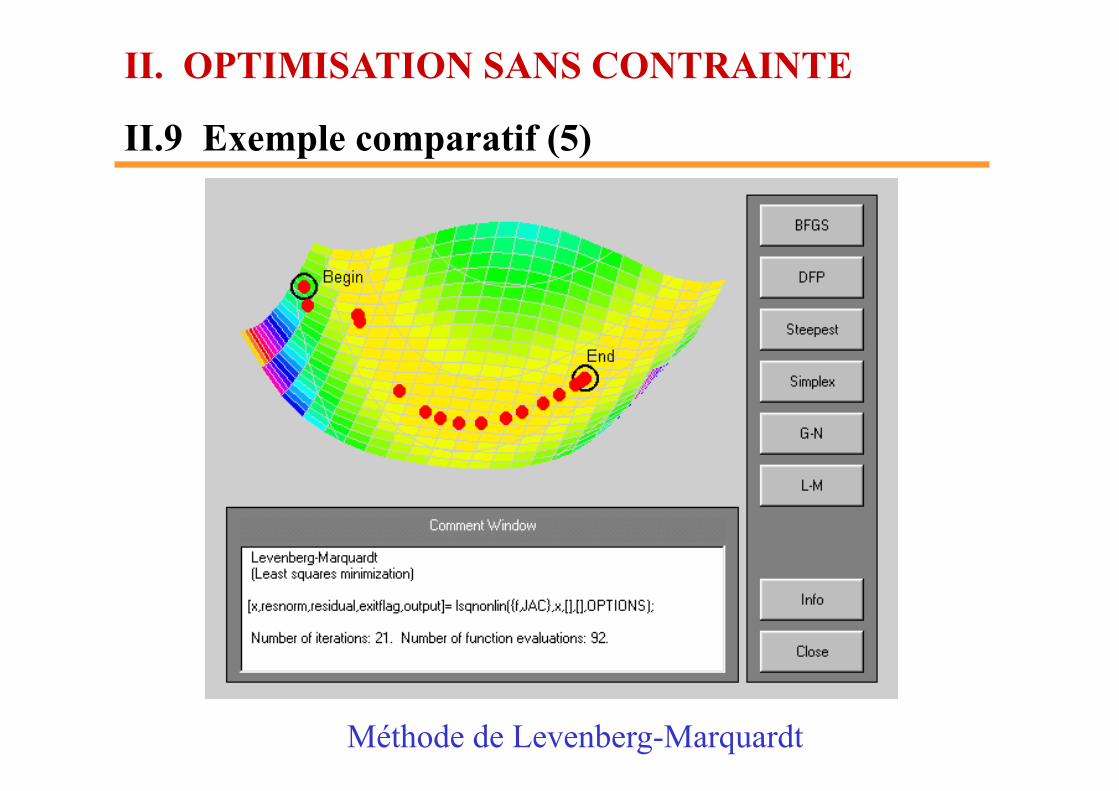
II.8.1.2 Algorithme de Levenberg-Marquardt
II.8.1.3 Méthodes quasi-Newton
Problèmes
II.8 Sommes de carrés – Equations non linéaires (4)
II. OPTIMISATION SANS CONTRAINTE
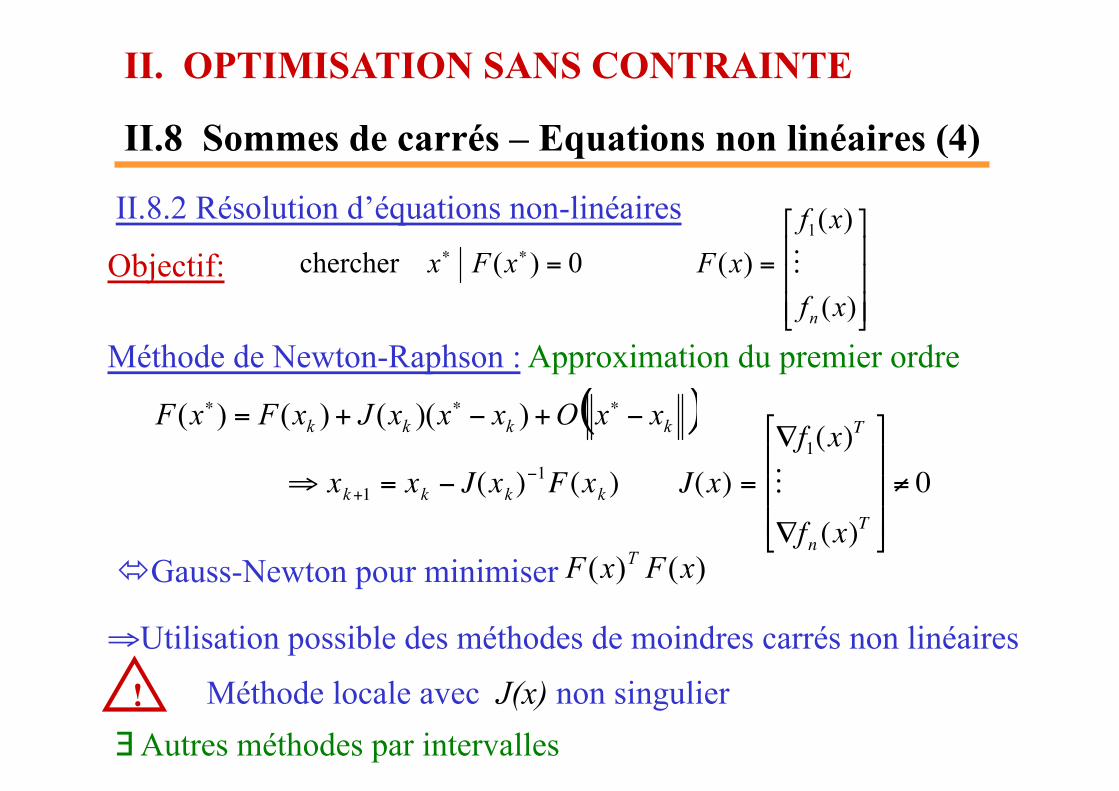
II.8.2 Résolution d’équations non-linéaires
Méthode de Newton-Raphson : Approximation du premier ordre
€
⇒ xk+1 = xk − J(xk )−1F(xk ) J(x) =
∇f1(x)T
∇fn (x)T
⎡
⎣
⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥ ≠ 0
ó Gauss-Newton pour minimiser
∃ Autres méthodes par intervalles
⇒ Utilisation possible des méthodes de moindres carrés non linéaires
Méthode locale avec J(x) non singulier
Objectif:
!
II.9 Exemple comparatif (1)
II. OPTIMISATION SANS CONTRAINTE
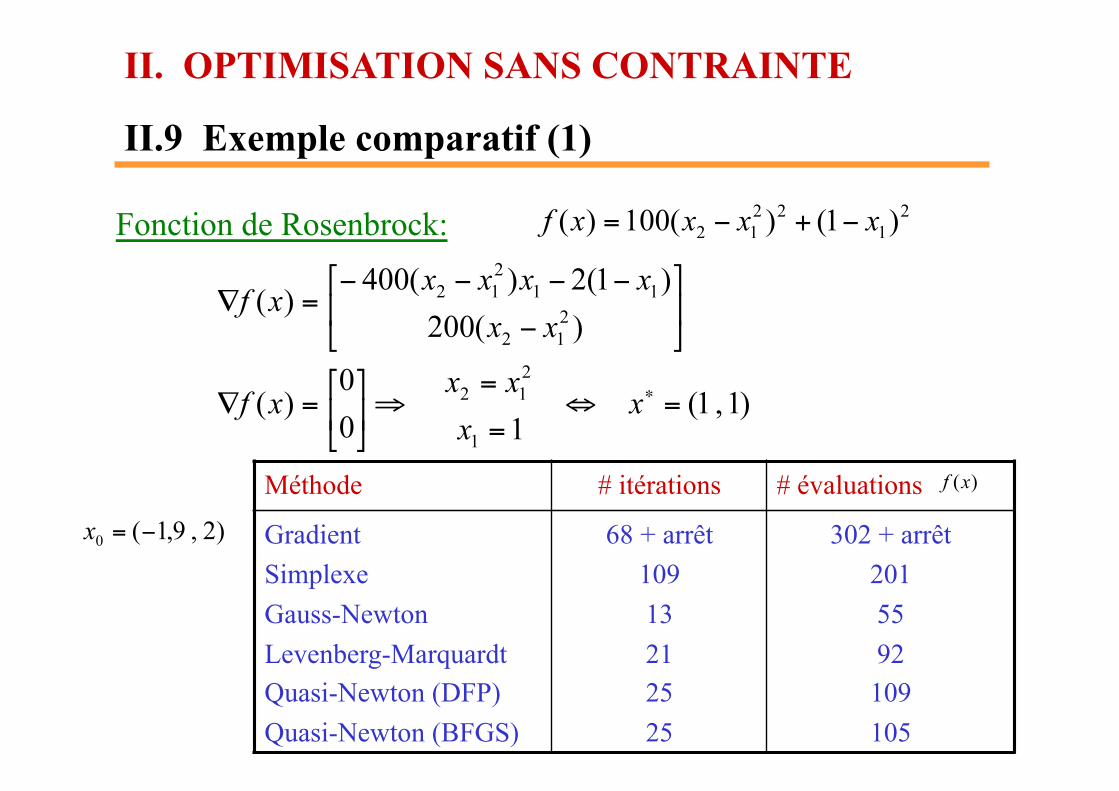
Fonction de Rosenbrock:
Méthode # itérations # évaluations
Gradient Simplexe Gauss-Newton Levenberg-Marquardt Quasi-Newton (DFP) Quasi-Newton (BFGS)
68 + arrêt 109 13 21 25 25
302 + arrêt 201 55 92 109 105
II.9 Exemple comparatif (2)
II. OPTIMISATION SANS CONTRAINTE
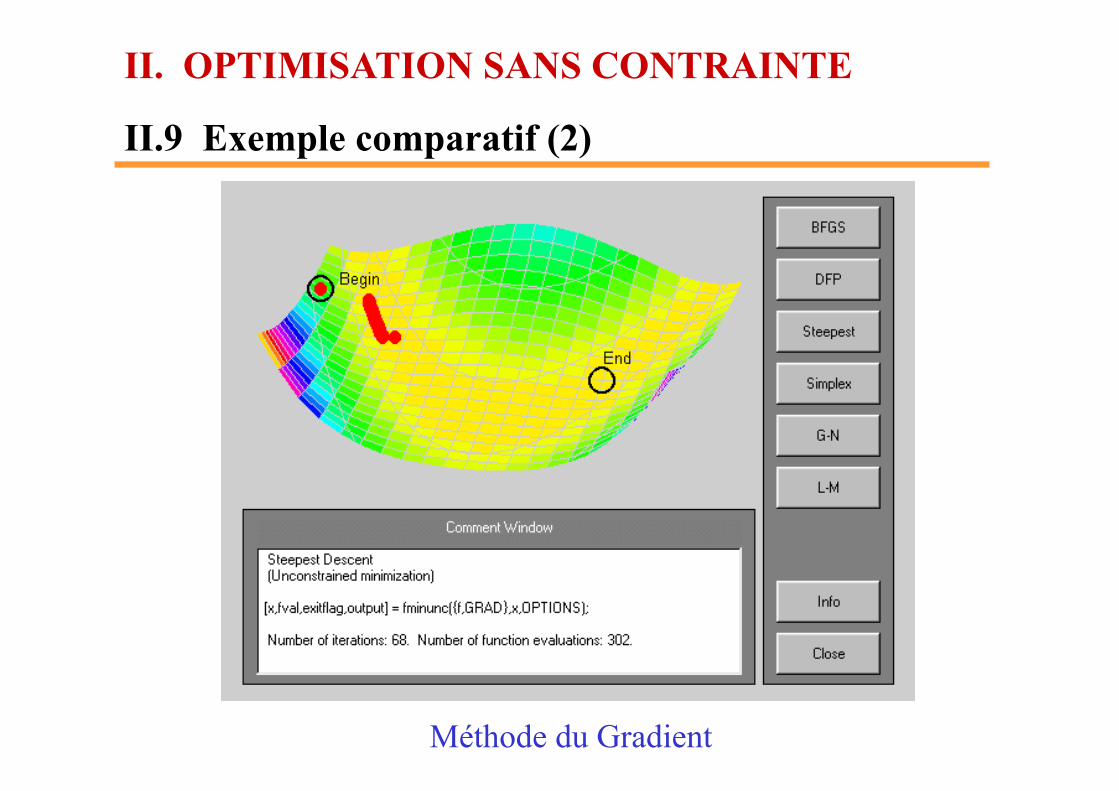
Méthode du Gradient
II.9 Exemple comparatif (3)
II. OPTIMISATION SANS CONTRAINTE
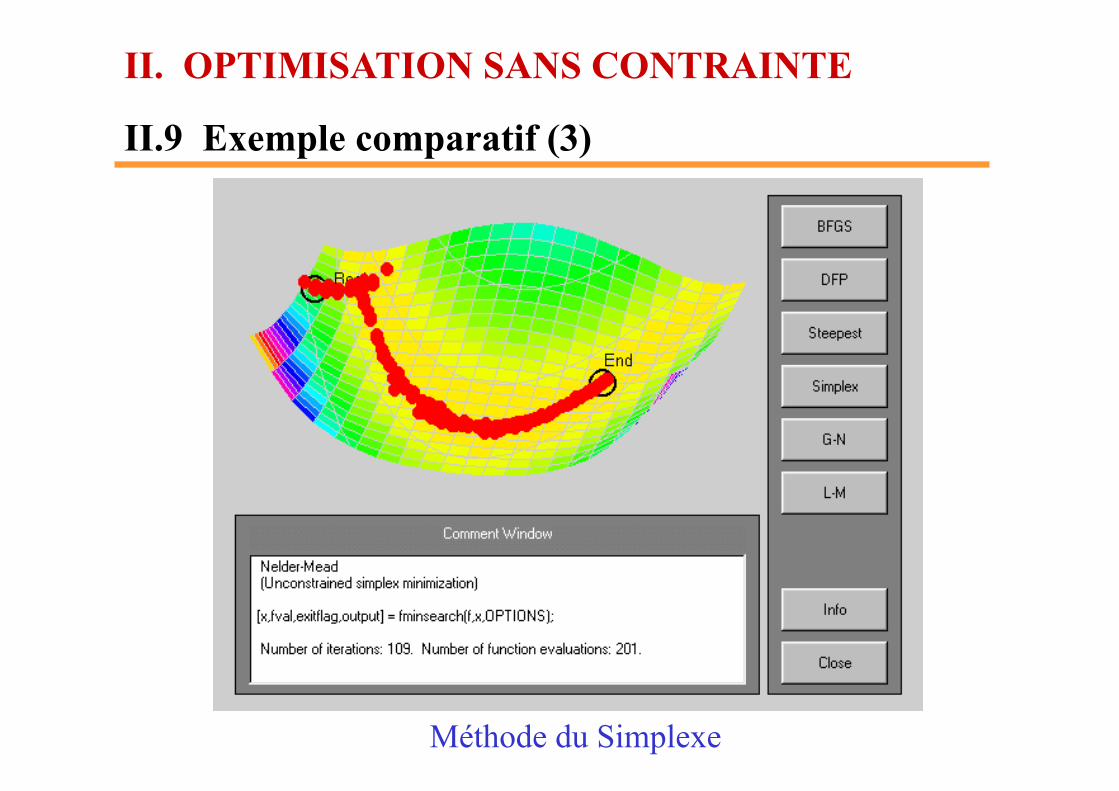
Méthode du Simplexe
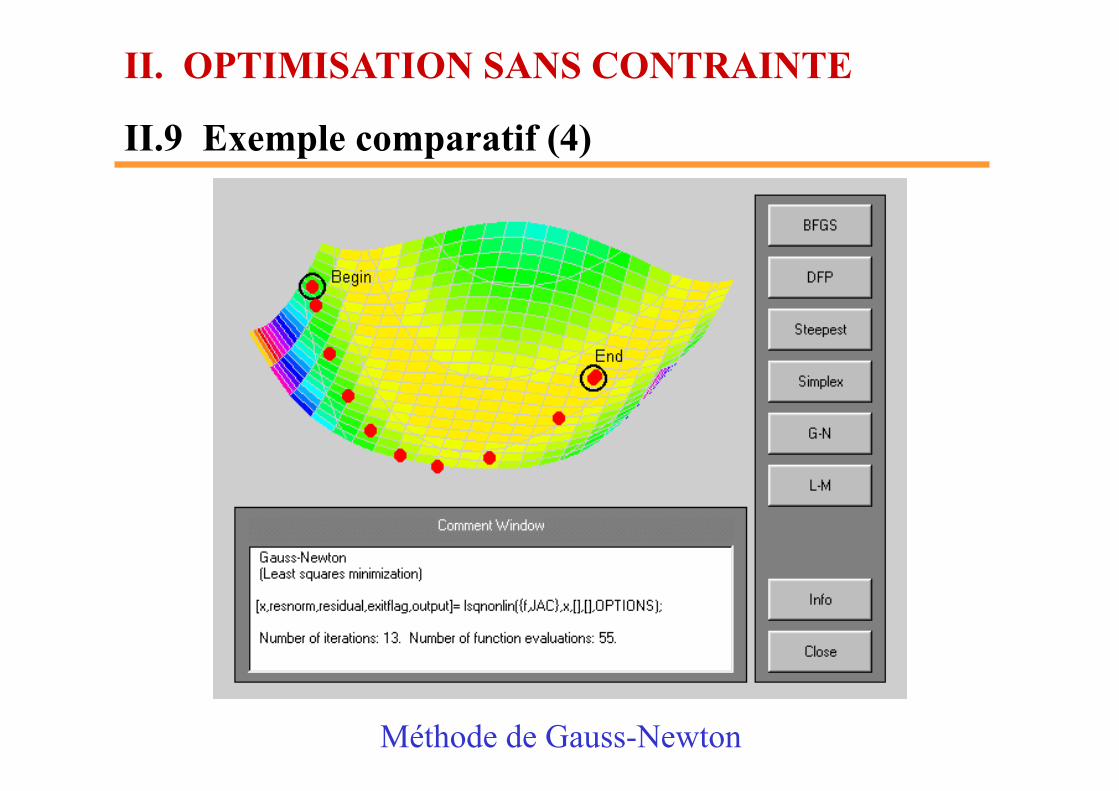
II.9 Exemple comparatif (4)
II. OPTIMISATION SANS CONTRAINTE
Méthode de Gauss-Newton
II.9 Exemple comparatif (5)
II. OPTIMISATION SANS CONTRAINTE
Méthode de Levenberg-Marquardt
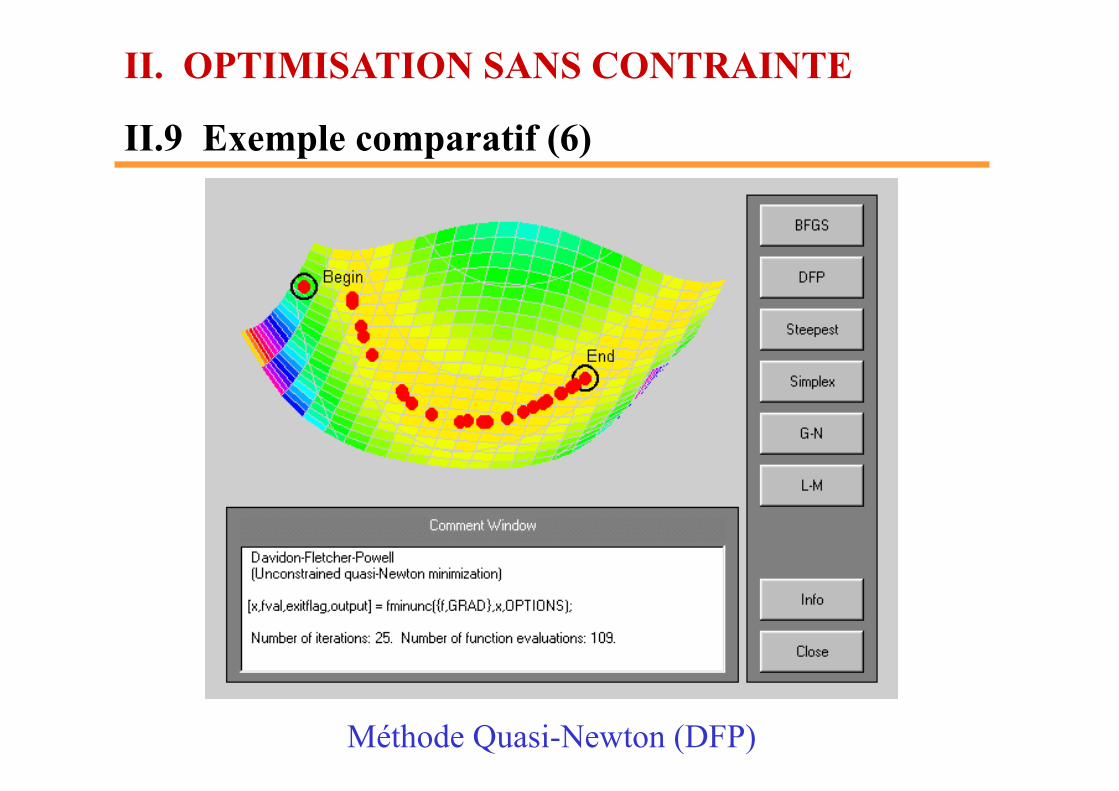
II.9 Exemple comparatif (6)
II. OPTIMISATION SANS CONTRAINTE
Méthode Quasi-Newton (DFP)
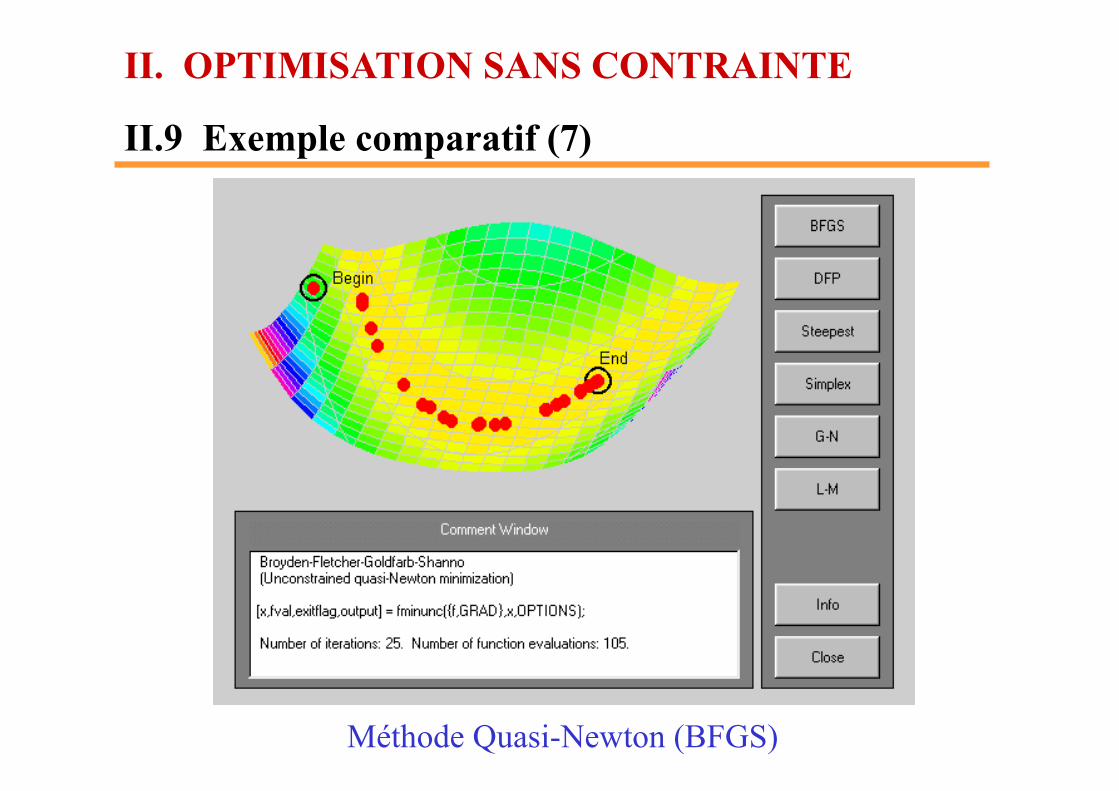
II.9 Exemple comparatif (7)
II. OPTIMISATION SANS CONTRAINTE
Méthode Quasi-Newton (BFGS)
![Beispielsammlung Prof. Kusolitsch Inhaltsverzeichnis · n = 1.Auf dem Semiring der halboffenen Intervalle (Pa,b] wird ein Maß definiert durch µ((a,b]) = xn∈(a,b] p n.Man bestimme](https://static.fdocument.org/doc/165x107/5b9f1abe09d3f2ab0b8ce418/beispielsammlung-prof-kusolitsch-i-n-1auf-dem-semiring-der-halboenen.jpg)