Grundlagen der Numerischen Str¨omungsmechanik · Grundlagen der Numerischen Str¨omungsmechanik...
208
-
Upload
truongthuan -
Category
Documents
-
view
232 -
download
1
Transcript of Grundlagen der Numerischen Str¨omungsmechanik · Grundlagen der Numerischen Str¨omungsmechanik...

Grundlagen der
Numerischen Stromungsmechanik
Vorlesungsskript
Nikolaus Adams, Steffen Stolz, Philipp Schlatter,Jorg Ziefle, Carlos Hartel, Leonhard Kleiser

I
Nomenklatur
Zeit t
raumliche Koordinaten (kartesisch) x, y, zx1, x2, x3
x
Geschwindigkeiten u, v, wu1, u2, u3
u
Wirbelstarke ω1, ω2, ω3
ω = rotu
Potential der Geschwindigkeit φu = gradφ
Schallgeschwindigkeit a
a2 =(∂p∂
)s=const.
= γp (id. Gas)
Dichte
Druck p
Temperatur T
Entropie s = cv lnpγ
innere Energie e
Enthalpie h = e+ p/
Totalenergie E = e+ |u|2/2Totalenthalpie H = h+ |u|2/2
Wintersemester 2007/2008
II
Vektor der Erhaltungsgrossen U = (, u, v, w, E)T
Vektoren der konvektiven Flusse(in x1, x2, x3) F , G, H
Vektoren der diffusiven (molekularen)
Flusse (in x1, x2, x3) F d, Gd, Hd
Warmestrom qi = −κ ∂T∂xi
q = −κ∇TAussere Volumenkrafte fx, fy, fz
f1, f2, f3f
Tensor der molekularen Spannungen τij(s. Gleichungen) τ
Konstanten und Koeffizienten
Isentropenexponent γpγ = const.
id. Gas: γ = cp/cv
Warmeleitfahigkeit κ
dynamische Zahigkeit µ
kinematische Zahigkeit ν =µ
spezifische Warme bei konstantem Volumen cv = 1γ−1R
spezifische Warme bei konstantem Druck cp = γγ−1R
Gaskonstante R = cp − cv
29. November 2007
III
Kennzahlen
Reynoldszahl Re
Machzahl Ma
Froudezahl Fr
Prandtlzahl Pr =cp µκ
Operatoren
Ableitung ∂j = ∂∂xj
Laplace-Operator ∆ = ∂2
∂xj∂xj= ∂j∂j
Gradient grad = (∂x, ∂y, ∂z)T
∇
Rotation rotu =
∂yuz − ∂zuy
∂zux − ∂xuz
∂xuy − ∂yux
Divergenz divφ = ∂xφ+ ∂yφ+ ∂zφ
Betrag eines Vektors |a| =√a21 + a2
2 + a23
substantielle Ableitung im Geschw.feld u DDt = ∂
∂t+ uj
∂∂xj
Mathematische Symbole
O() Landausches Ordnungssymbol a = O(x), x→ x0
bedeutet: Es gibt eineKonstante K, so dass∣∣ ax
∣∣ ≤ K fur x→ x0.
Wintersemester 2007/2008


V
Inhaltsverzeichnis
1 Einfuhrung 11.1 Vorbemerkung . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Numerische Fluiddynamik . . . . . . . . . . . . . . . . . . . . . 3
2 Grundgleichungen und abgeleitete Gleichungen 112.1 Navier-Stokes-Gleichungen und Euler-Gleichungen . . . . . . . . 112.2 Laplace-Gleichung und Poisson-Gleichung . . . . . . . . . . . . 142.3 Diffusionsgleichung und Grenzschichtgleichungen . . . . . . . . 152.4 Advektionsgleichung und Wellengleichung . . . . . . . . . . . . 162.5 Typklassifizierung partieller Differentialgleichungen . . . . . . . 16
2.5.1 Elliptische partielle Differentialgleichungen . . . . . . . . 212.5.2 Parabolische partielle Differentialgleichungen . . . . . . . 232.5.3 Hyperbolische partielle Differentialgleichungen . . . . . . 26
3 Diskretisierungsverfahren 353.1 Finite-Differenzen-Verfahren . . . . . . . . . . . . . . . . . . . . 35
3.1.1 Kompakte Finite-Differenzen-Verfahren . . . . . . . . . 383.1.2 Modifizierte Wellenzahl . . . . . . . . . . . . . . . . . . 393.1.3 Finite-Differenzen-Verfahren fur nicht-aquidistante Gitter 41
3.2 Finite-Volumen-Methode . . . . . . . . . . . . . . . . . . . . . 433.3 Methode der gewichteten Residuen: Spektralverfahren . . . . . . 44
3.3.1 Grundprinzip . . . . . . . . . . . . . . . . . . . . . . . . 443.3.2 Wahl der Gewichtsfunktionen . . . . . . . . . . . . . . . 463.3.3 Wahl der Ansatzfunktionen . . . . . . . . . . . . . . . . 483.3.4 Pseudospektrale Auswertung der nichtlinearen Terme . . 55
3.4 Finite-Elemente-Methode . . . . . . . . . . . . . . . . . . . . . 573.5 Eigenschaften und Analyse von Diskretisierungsverfahren . . . . 62
3.5.1 Konsistenz und Konvergenz . . . . . . . . . . . . . . . . 633.5.2 Stabilitatsbegriffe . . . . . . . . . . . . . . . . . . . . . 663.5.3 Methoden zur Stabilitatsanalyse . . . . . . . . . . . . . 73
Wintersemester 2007/2008
Inhaltsverzeichnis VI
4 Grundtypen von Losungsverfahren 83
4.1 Hyperbolische Gleichungen . . . . . . . . . . . . . . . . . . . . 83
4.1.1 Wichtige Diskretisierungsschemata . . . . . . . . . . . . 83
4.1.2 Analyse von Verfahren fur lineare Gleichungen . . . . . . 86
4.1.3 Nichtlineare Gleichungen und unstetige Losungen . . . . 93
4.2 Elliptische Gleichungen . . . . . . . . . . . . . . . . . . . . . . 95
4.2.1 Iterative Verfahren . . . . . . . . . . . . . . . . . . . . . 97
4.2.2 Konvergenzbeschleunigung . . . . . . . . . . . . . . . . 103
4.3 Parabolische Gleichungen . . . . . . . . . . . . . . . . . . . . . 105
5 Berechnung inkompressibler Stromungen 113
5.1 Grundgleichungen in primitiven Variablen . . . . . . . . . . . . . 113
5.2 Druckprojektion . . . . . . . . . . . . . . . . . . . . . . . . . . 114
5.3 Losungsmethoden in primitiven Variablen . . . . . . . . . . . . 116
5.3.1 Volldiskretisierte Gleichungen . . . . . . . . . . . . . . . 117
5.3.2 Einflussmatrix-Methode . . . . . . . . . . . . . . . . . . 119
5.3.3 Zwischenschritt-Methode . . . . . . . . . . . . . . . . . 119
5.3.4 Druckkorrektur-Methoden . . . . . . . . . . . . . . . . . 120
5.3.5 Methode der kunstlichen Kompressibilitat . . . . . . . . 120
5.4 Alternative Formulierungen der Bewegungsgleichung . . . . . . . 121
5.4.1 Wirbelstarke-Vektorpotential-Formulierung . . . . . . . . 121
5.4.2 Wirbelstarke-Geschwindigkeits-Formulierung . . . . . . . 123
6 Turbulente Stromungen 125
6.1 Direkte Numerische Simulation . . . . . . . . . . . . . . . . . . 128
6.2 Reynolds-gemittelte Gleichungen und Turbulenzmodelle . . . . . 130
6.2.1 Wirbelzahigkeitsmodelle (eddy-viscosity models) . . . . . 131
6.2.2 Reynoldsspannungs-Modelle (Second-Order Closures) . . 133
6.3 Grobstruktur-Simulation (Large-Eddy Simulation) . . . . . . . . 133
7 Lagrangesche Methoden 139
7.1 Lattice-Boltzmann-Methoden - LBM . . . . . . . . . . . . . . . 140
7.1.1 LBM fur die 2D inkompressiblen Navier-Stokes-Gleichungen . . . . . . . . . . . . . . . . . . . . . . . . 140
7.1.2 Analyse eines LBM-Verfahrens fur die viskose Burgers-Gleichung . . . . . . . . . . . . . . . . . . . . . . . . . 143
7.2 Smooth Particle Hydrodynamics - SPH . . . . . . . . . . . . . . 144
29. November 2007
VII Inhaltsverzeichnis
8 Ubungsaufgaben 1478.1 Rundungsfehler . . . . . . . . . . . . . . . . . . . . . . . . . . 147
8.1.1 Aufgabe . . . . . . . . . . . . . . . . . . . . . . . . . . 1478.2 Typ von Differentialgleichungen . . . . . . . . . . . . . . . . . . 148
8.2.1 Aufgabe . . . . . . . . . . . . . . . . . . . . . . . . . . 1488.3 Fouriertransformation . . . . . . . . . . . . . . . . . . . . . . . 149
8.3.1 Aufgabe . . . . . . . . . . . . . . . . . . . . . . . . . . 1498.4 Finite-Volumen-Methode . . . . . . . . . . . . . . . . . . . . . 150
8.4.1 Aufgabe . . . . . . . . . . . . . . . . . . . . . . . . . . 1508.5 Finite-Elemente-Methode . . . . . . . . . . . . . . . . . . . . . 154
8.5.1 Aufgabe . . . . . . . . . . . . . . . . . . . . . . . . . . 1548.6 Diskretisierungsverfahren fur die Advektionsgleichung . . . . . . 155
8.6.1 Aufgabe . . . . . . . . . . . . . . . . . . . . . . . . . . 1558.6.2 Losung . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
8.7 Analyse von Finite-Differenzen-Verfahren . . . . . . . . . . . . . 1618.7.1 Aufgabe . . . . . . . . . . . . . . . . . . . . . . . . . . 161
8.8 Losungsverfahren fur elliptische Gleichungen . . . . . . . . . . . 1638.8.1 Aufgabe . . . . . . . . . . . . . . . . . . . . . . . . . . 163
8.9 Losungsverfahren fur parabolische Gleichungen . . . . . . . . . . 1658.9.1 Aufgabe . . . . . . . . . . . . . . . . . . . . . . . . . . 165
8.10 Lattice Boltzmann Methode . . . . . . . . . . . . . . . . . . . . 1668.10.1 Aufgabe . . . . . . . . . . . . . . . . . . . . . . . . . . 1668.10.2 Losung . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
A Matrix- und Vektor-Analysis 187A.1 Vektor-Normen und Matrix-Normen . . . . . . . . . . . . . . . 187A.2 Normen fur Funktionen und Gitterfunktionen . . . . . . . . . . 189
B Finite-Differenzen-Schemata 191B.1 Finite-Differenzen-Verfahren zur Integration von gewohnlichen
Differentialgleichungen . . . . . . . . . . . . . . . . . . . . . . 191B.2 Finite-Differenzen-Schemata zur Diskretisierung von Ableitungs-
operatoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192B.3 Finite-Differenzen-Schemata zur Diskretisierung der Advektions-
gleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
C Literaturverzeichnis 197
Wintersemester 2007/2008


1
Kapitel 1
Einfuhrung
1.1 Vorbemerkung
In Fluiddynamik, Energie- und Verfahrenstechnik spielen Transport- und Aus-tauschprozesse eine grosse Rolle. Sie erscheinen in einer unuberschaubarenVielfalt: Stromungen durch ein Triebwerk, Verdampfung und Verbrennung vonTreibstoff in einer Brennkammer, Mischen von Komponenten in einem Ruhr-kessel, Blutstromung in einem kunstlichen Herzen, Kristallwachstum in einerSchmelze oder Bildung von Nanopartikeln in einem Flammreaktor sind nur ei-nige Beispiele.
Oft sind es Stromungsvorgange, die den Austausch von Masse, Impuls undEnergie durch Konvektion und Diffusion bewerkstelligen. In anderen Fallenerfolgt der Transport durch reine Diffusion oder Warmeleitung. Phanomenewie Turbulenz, Oberflachenspannung, Kapillaritat, Prasenz mehrerer Phasen,die Phasenubergange Schmelzen/Erstarren und Verdampfung/Kondensation,Strahlung, chemische Reaktionen (insbesondere Verbrennung), Massenkrafte,Fluid-Struktur-Wechselwirkung und viele mehr erfordern gegebenenfalls einespezielle Modellierung und konnen die theoretische Beschreibung wesentlich er-schweren. Oft spielen sich Phanomene gleichzeitig auf ganz unterschiedlichenLangen- und Zeitskalen ab. Zu der dynamischen Komplexitat der meist nicht-linear wechselwirkenden Phanomene kommt die geometrische Komplexitat derin der Praxis vorkommenden Konfigurationen.
Trotz des im Einzelfall hohen Schwierigkeitsgrads vieler Problemstellungenund erst unzureichend geloster Probleme bei der Modellierung hat die numeri-sche Berechnung oder Simulation in der Energie- und Verfahrenstechnik heutebereits eine grosse Bedeutung erlangt, die in der Zukunft noch weiter zuneh-men wird. Grund dafur ist der dringende Bedarf nach Analyse und Optimierungvon Geraten und Prozessen in immer kurzerer Zeit und zu ertraglichen Kosten.Man erhofft sich von der numerischen Berechnung, wenn sie denn hinreichend
Wintersemester 2007/2008
1.1 Vorbemerkung 2
zuverlassig und effizient durchgefuhrt werden kann, grosse Vorteile im Vergleichzu einer Entwicklung allein auf der Basis von Laborexperimenten oder gar auf-wendigen Grossanlagen.
Die mathematische Formulierung der Aufgabenstellungen fuhrt wie in derNumerischen Fluiddynamik oft auf ein System partieller Differentialgleichungen,das zusammen mit Rand- und ggf. Anfangsbedingungen gelost werden muss.Dabei gibt es drei wichtige Grundtypen von Vorgangen, die anhand einfacherModellgleichungen studiert werden konnen und sich in ihrer mathematischenKlassifikation unterscheiden:
• Konvektive Transportvorgange(Modell: Advektions- oder Wellengleichung; hyperbolischer Typ)
• Diffusive Vorgange(Modell: Warmeleitungsgleichung; parabolischer Typ)
• Gleichgewichtszustande nach Abklingen von Transienten(Modell: Laplace- oder Poissongleichung; elliptischer Typ).
Vor diesem Hintergrund befasst sich diese Vorlesung mit einer Einfuhrung indie Methoden zur numerischen Losung der genannten Grundaufgaben. Wir neh-men dabei meist Bezug auf Fragestellungen der Fluiddynamik oder des Warme-transports. Die besprochenen Methoden sind jedoch universell und fur eineVielzahl von Problemen der Energie- und Verfahrenstechnik einsetzbar.
Kapitel 2 der Vorlesung rekapituliert die Grundgleichungen und ihre Typklas-sifizierung, die wichtig ist fur die mathematisch sachgemasse Formulierung deszu losenden Problems. Sodann werden in Kapitel 3 die wesentlichen Diskreti-sierungsmethoden eingefuhrt. Der Schwerpunkt liegt dabei auf den klassischenDifferenzenverfahren. Besonderer Wert wird gelegt auf den Stabilitatsbegriff. InKapitel 4 werden dann speziell fur die einzelnen Gleichungstypen (hyperbolisch,elliptisch und parabolisch) geeignete Differenzenverfahren besprochen. IterativeVerfahren zur Losung diskretisierter elliptischer Gleichungen werden eingefuhrt.Kapitel 5 befasst sich mit der Berechnung inkompressibler Stromungen, wo sichspezielle Fragen stellen bei der Behandlung der Kontinuitatsgleichung und derdamit zusammenhangenden Druckberechnung. Kapitel 6 gibt schliesslich eineUbersicht uber verschiedene Ansatze zur Modellierung der Turbulenz, die beiStromungsberechnungen nicht selten ein grosses Problem darstellt.
29. November 2007
3 1 Einfuhrung
1.2 Numerische Fluiddynamik
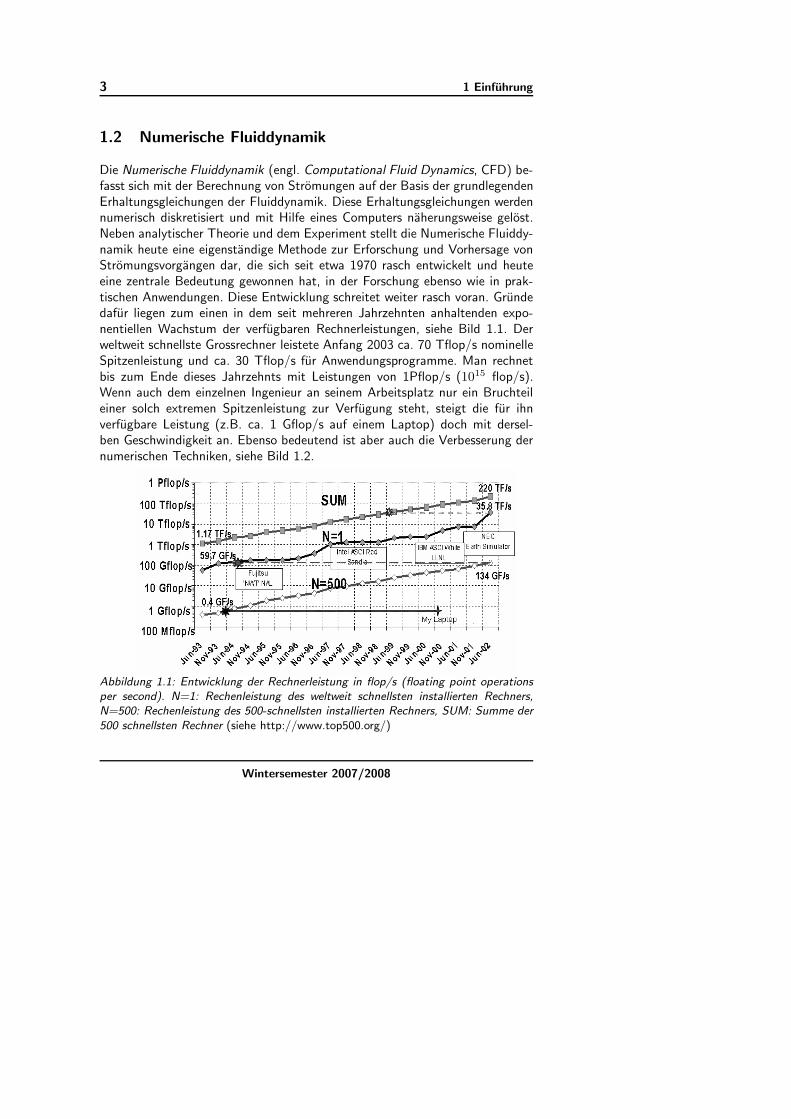
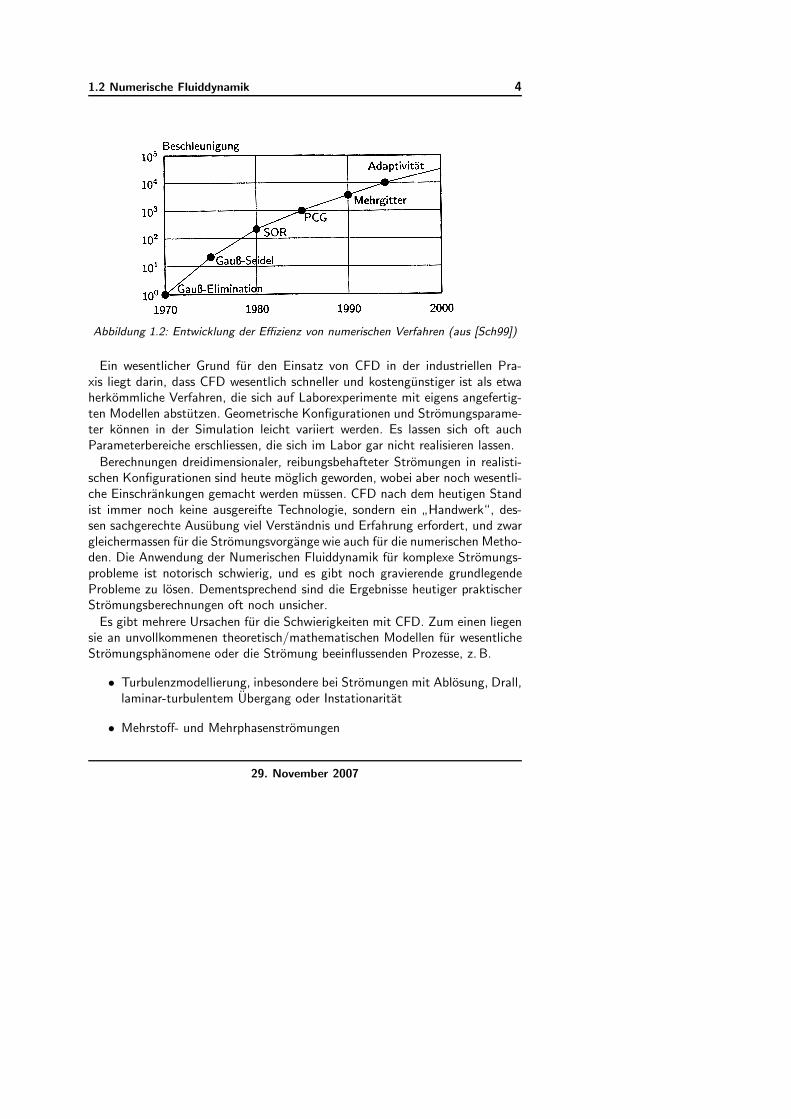
Die Numerische Fluiddynamik (engl. Computational Fluid Dynamics, CFD) be-fasst sich mit der Berechnung von Stromungen auf der Basis der grundlegendenErhaltungsgleichungen der Fluiddynamik. Diese Erhaltungsgleichungen werdennumerisch diskretisiert und mit Hilfe eines Computers naherungsweise gelost.Neben analytischer Theorie und dem Experiment stellt die Numerische Fluiddy-namik heute eine eigenstandige Methode zur Erforschung und Vorhersage vonStromungsvorgangen dar, die sich seit etwa 1970 rasch entwickelt und heuteeine zentrale Bedeutung gewonnen hat, in der Forschung ebenso wie in prak-tischen Anwendungen. Diese Entwicklung schreitet weiter rasch voran. Grundedafur liegen zum einen in dem seit mehreren Jahrzehnten anhaltenden expo-nentiellen Wachstum der verfugbaren Rechnerleistungen, siehe Bild 1.1. Derweltweit schnellste Grossrechner leistete Anfang 2003 ca. 70 Tflop/s nominelleSpitzenleistung und ca. 30 Tflop/s fur Anwendungsprogramme. Man rechnetbis zum Ende dieses Jahrzehnts mit Leistungen von 1Pflop/s (1015 flop/s).Wenn auch dem einzelnen Ingenieur an seinem Arbeitsplatz nur ein Bruchteileiner solch extremen Spitzenleistung zur Verfugung steht, steigt die fur ihnverfugbare Leistung (z.B. ca. 1 Gflop/s auf einem Laptop) doch mit dersel-ben Geschwindigkeit an. Ebenso bedeutend ist aber auch die Verbesserung dernumerischen Techniken, siehe Bild 1.2.
Abbildung 1.1: Entwicklung der Rechnerleistung in flop/s (floating point operationsper second). N=1: Rechenleistung des weltweit schnellsten installierten Rechners,N=500: Rechenleistung des 500-schnellsten installierten Rechners, SUM: Summe der500 schnellsten Rechner (siehe http://www.top500.org/)
Wintersemester 2007/2008
1.2 Numerische Fluiddynamik 4
Abbildung 1.2: Entwicklung der Effizienz von numerischen Verfahren (aus [Sch99])
Ein wesentlicher Grund fur den Einsatz von CFD in der industriellen Pra-xis liegt darin, dass CFD wesentlich schneller und kostengunstiger ist als etwaherkommliche Verfahren, die sich auf Laborexperimente mit eigens angefertig-ten Modellen abstutzen. Geometrische Konfigurationen und Stromungsparame-ter konnen in der Simulation leicht variiert werden. Es lassen sich oft auchParameterbereiche erschliessen, die sich im Labor gar nicht realisieren lassen.
Berechnungen dreidimensionaler, reibungsbehafteter Stromungen in realisti-schen Konfigurationen sind heute moglich geworden, wobei aber noch wesentli-che Einschrankungen gemacht werden mussen. CFD nach dem heutigen Standist immer noch keine ausgereifte Technologie, sondern ein
”Handwerk“, des-
sen sachgerechte Ausubung viel Verstandnis und Erfahrung erfordert, und zwargleichermassen fur die Stromungsvorgange wie auch fur die numerischen Metho-den. Die Anwendung der Numerischen Fluiddynamik fur komplexe Stromungs-probleme ist notorisch schwierig, und es gibt noch gravierende grundlegendeProbleme zu losen. Dementsprechend sind die Ergebnisse heutiger praktischerStromungsberechnungen oft noch unsicher.
Es gibt mehrere Ursachen fur die Schwierigkeiten mit CFD. Zum einen liegensie an unvollkommenen theoretisch/mathematischen Modellen fur wesentlicheStromungsphanomene oder die Stromung beeinflussenden Prozesse, z. B.
• Turbulenzmodellierung, inbesondere bei Stromungen mit Ablosung, Drall,laminar-turbulentem Ubergang oder Instationaritat
• Mehrstoff- und Mehrphasenstromungen
29. November 2007

5 1 Einfuhrung
• Stromungen mit chemischen Reaktionen (z. B. Verbrennung)
und viele mehr. Zum anderen gibt es auch numerisch-technische Probleme:
• Gittererzeugung
• Effizienz und Robustheit der iterativen Losungsverfahren
• Der erforderliche Aufwand: Insbesondere bei dreidimensionalen (3-D) underst recht bei instationaren Problemen konnen die verfugbaren Ressourcen(Speicher, Rechenzeit) schnell um Grossenordnungen uberstiegen sein.
Zwar gibt es heute vielfaltige, auch kommerziell erhaltliche CFD-Software,doch kann diese in der Regel nicht einfach im Sinn von
”black-box tools“ ein-
gesetzt werden. Das Wissen um den sachgerechten Einsatz von CFD-Softwareist das eigentliche
”Know-How“ eines Anwenders. Solches Erfahrungswissen
wird auch teilweise bereits systematisch gesammelt und publiziert, siehe [ERC]und [QNE].
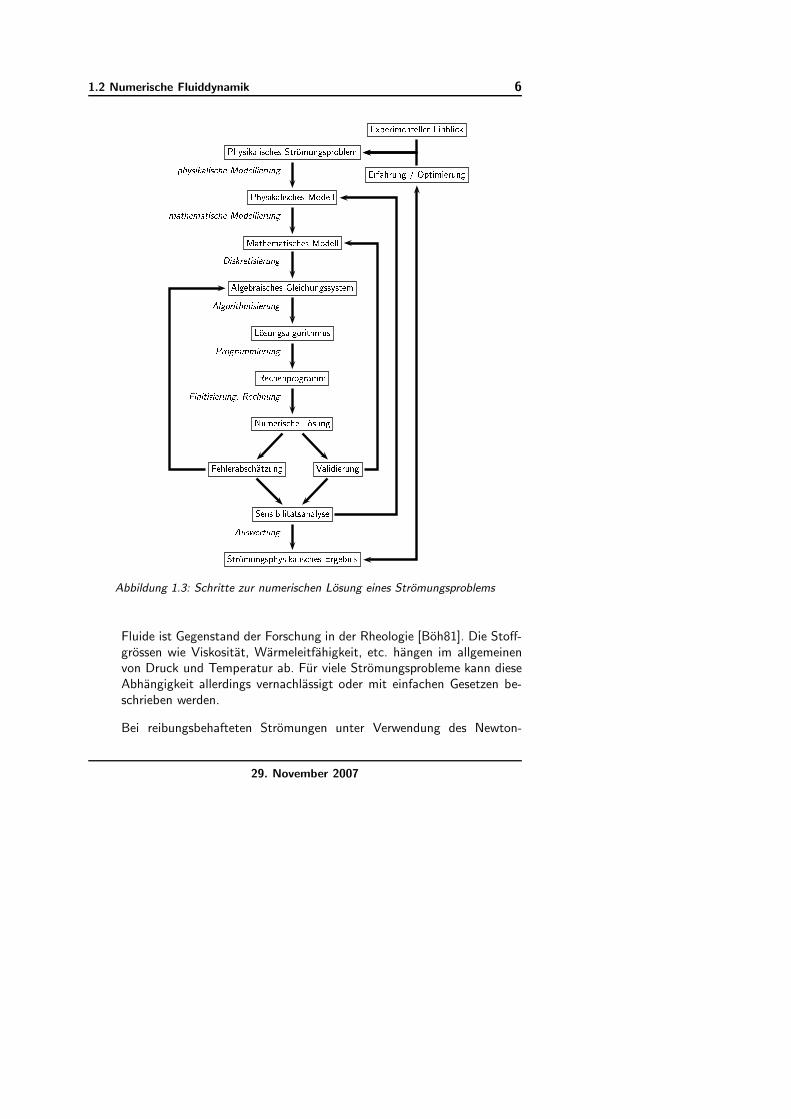
Zur numerischen Losung eines Stromungsproblems sind grundsatzlich mehrereSchritte notwendig, von der Definition des Problems bis hin zu der Auswertungder Ergebnisse. In Abbildung 1.3 sind schematisch die wichtigsten Aufgabendargestellt. Diese werden im folgenden naher erlautert.
• Definition des StromungsproblemsAls erstes muss das Stromungsproblem genau definiert werden. Hierbeimussen die Geometrie, die Randbedingungen, ggf. Anfangsbedingungenund die Parameter festgelegt werden. Experimentelle Erkenntnisse be-ziehungsweise Erfahrungen aus bestehenden numerischen Simulationengeben Aufschluss, welche Stromungsphanomene zu erwarten sind und inBetracht gezogen werden mussen.
• Physikalische ModellierungGewisse Eigenschaften des Fluids, insbesondere die Schubspannungen,mussen modelliert werden. Haufig wird fur die Schubspannungen ein New-tonscher Ansatz verwendet, d. h. die Schubspannung ist proportional zurScherrate und die Viskositat ist eine Stoffgrosse des Fluids. Fur kom-plexere Fluide wie Polymere, Suspensionen, etc. mussen jedoch derenrheologische Eigenschaften berucksichtigt werden. Das Verhalten solcher
Wintersemester 2007/2008
1.2 Numerische Fluiddynamik 6
Physikalis hes StromungsproblemPhysikalis hes ModellMathematis hes ModellAlgebrais hes Glei hungssystemLosungsalgorithmusRe henprogrammNumeris he LosungFehlerabs hatzung ValidierungSensibilitatsanalyseStromungsphysikalis hes Ergebnis
Experimenteller Einbli kErfahrung / Optimierungphysikalis he Modellierungmathematis he ModellierungDiskretisierungAlgorithmisierungProgrammierungFinitisierung, Re hnung
AuswertungAbbildung 1.3: Schritte zur numerischen Losung eines Stromungsproblems
Fluide ist Gegenstand der Forschung in der Rheologie [Boh81]. Die Stoff-grossen wie Viskositat, Warmeleitfahigkeit, etc. hangen im allgemeinenvon Druck und Temperatur ab. Fur viele Stromungsprobleme kann dieseAbhangigkeit allerdings vernachlassigt oder mit einfachen Gesetzen be-schrieben werden.
Bei reibungsbehafteten Stromungen unter Verwendung des Newton-
29. November 2007
7 1 Einfuhrung
schen Schubspannungsansatzes spricht man von den Navier-Stokes-Gleichungen. Fur Stromungen, bei denen Reibung eine untergeordneteRolle spielt, z. B. im ferneren Aussenbereich bei der Umstromung einesKorpers, kann die Reibung (Schubspannungen) vernachlassigt werden. Indiesem Falle lost man die Euler-Gleichungen. Fur drehungsfreie und rei-bungsfreie Stromungen kann man die Gleichungen weiter vereinfachenund die Stromung mit Hilfe eines Potentials beschreiben.
Fur kleine Stromungsgeschwindigkeiten im Verhaltnis zur Schallgeschwin-digkeit, d. h. fur kleine Mach-Zahlen Ma, kann das Fluid als inkom-pressibel und die Dichte ρ als konstant angenommen werden. Im Fal-le grosserer Mach-Zahlen, insbesondere fur Stromungsgeschwindigkeitennahe der oder grosser als die Schallgeschwindigkeit, ist eine kompressibleBeschreibung unter Berucksichtigung der Energiegleichung und Zustands-gleichung erforderlich.
Man beobachtet grundsatzlich verschiedene Stromungsformen, z. B. lami-nare, transitionelle und turbulente Stromungen. Insbesondere fur die Be-rechnung turbulenter Stromungen mussen in der Regel modifizierte Glei-chungen mit entsprechenden Modellen zur Behandlung der Turbulenz ver-wendet werden, wie z. B. Reynolds-gemittelte Navier-Stokes-Gleichungen(Reynolds-Averaged Navier-Stokes Equations, RANS) oder gefilterte Glei-chungen fur die Grobstruktursimulation (Large-Eddy Simulation, LES).Aufwendiger, und nur fur einfache modellhafte Stromungsprobleme beiniedrigen Reynoldszahlen durchfuhrbar, sind Direkte Numerische Simula-tionen (Direct Numerical Simulations, DNS), bei denen alle turbulentenSkalen aufgelost werden und kein Turbulenzmodell notwendig ist.
• Mathematische ModellierungDas physikalische Modell muss mathematisch formuliert werden. Dafursind passende Grundgleichungen heranzuziehen, zum Beispiel im Fal-le inkompressibler Stromungen die inkompressiblen Navier-Stokes-Gleichungen (Massen- und Impulserhaltung) fur die Stromungsgeschwin-digkeiten und den Druck. Insgesamt besteht das mathematische Modellin der Regel aus einem Anfangs-Randwert-Problem fur ein nichtlinearesSystem von partiellen Differentialgleichungen fur die Stromungsgrossen(Geschwindigkeiten, Druck, Dichte usw.) mit stoffabhangigen Parameternoder Zusatzbedingungen. Die sachgemasse Formulierung des mathemati-schen Modells erfordert besondere Aufmerksamkeit.
Wintersemester 2007/2008
1.2 Numerische Fluiddynamik 8
• DiskretisierungFur die numerische Losung muss ein endliches Rechengebiet definiert unddieses gegebenenfalls auf ein einfacher zu behandelndes Gebiet transfor-miert werden. In diesem Rechenbereich wird ein Gitter erzeugt, auf demdie zunachst kontinuierlichen Gleichungen naherungsweise diskret gelostwerden. Dazu sind die Grundgleichungen mit einem geeigneten numeri-schen Verfahren, z. B. Finite-Differenzen- oder Finite-Volumen-Verfahren,zu diskretisieren. Man erhalt so ein grosses, i. a. nichtlineares algebraischesGleichungssystem fur die diskretisierten Grossen. In Abhangigkeit von derGitterfeinheit kann das Gleichungssystem sehr gross werden (bis zu vielenMillionen von Unbekannten).
• LosungsverfahrenDas aus der Diskretisierung erhaltene Gleichungssystem muss mit Hilfeeines Algorithmus entweder direkt, oder iterativ bis zum Erreichen ei-nes Abbruchkriteriums, naherungsweise gelost werden. Um eine effizienteBerechnung zu ermoglichen, muss die Auswahl der Algorithmen auf dieeinzusetzende Rechnerarchitektur abgestimmt werden.
• ProgrammierungVor der eigentlichen Programmierung des gesamten numerischen Prozes-ses ist ein Konzept (Programmstruktur) festzulegen. Aufgrund der gros-sen Menge an zu speichernden Daten (oft Gigabytes bis Terabytes) ist eswichtig, eine passende Datenstruktur sowohl fur Daten im Hauptspeicherals auch fur auf Massenspeichern (Festplatte, Band, etc.) zu speicherndeDaten zu verwenden.
• Finitisierung, RechnungDie Darstellung der reellen Zahlen mit einer finiten Menge an Maschi-nenzahlen und das Abbrechen von unendlichen Reihen durch endlichviele Auswertungen (etwa zur Reprasentation elementarer Funktionen)kann man unter dem Begriff Finitisierung zusammenfassen. Insbesonderekommt hier der Einfluss von Rundungsfehlern ins Spiel.
Die eigentliche Berechnung kann je nach Grosse des Problems, gewahl-ten Modellen, Losungsverfahren und Rechnerleistung fur einfache Falle inwenigen Sekunden erledigt sein oder aber bis zu mehreren Stunden odergar Monaten dauern.
• Fehlerabschatzung
29. November 2007
9 1 Einfuhrung
Die Analyse der numerischen Fehler bei der Diskretisierung, Algorithmi-sierung und Finitisierung gibt Anhaltspunkte dafur, wie genau die nume-rische Losung die exakte Losung des mathematischen Modells approxi-miert. Die Approximation kann durch Verfeinerung des Gitters oder unterUmstanden durch Anderungen im numerischen Verfahren verbessert wer-den. Realistische Fehlerabschatzungen sind aber in der Regel sehr schwie-rig.
• ValidierungDie Validierung eines neu entwickelten Berechnungsprogramms und einerspezifischen numerischen Losung erfolgt durch den Vergleich mit Refe-renzlosungen, mit analytischen Losungen von Testproblemen, mit Ergeb-nissen anderer Codes und/oder mit Ergebnissen aus Experimenten. Fallsnotwendig, muss das mathematische Modell und das Losungsverfahrenangepasst oder korrigiert werden.
• Auswertung und AnalyseDie Auswertung der numerischen Losung erfolgt entweder parallel zurAusfuhrung des Programms (mitlaufend) oder in einem nachgeschaltetenSchritt (
”post-processing“ der gespeicherten Daten). Oft sind statistische
Grossen wie Mittelwerte und turbulente Fluktuationen von Interesse. Fallsdie Ergebnisse nicht im Gultigkeitsbereich der physikalischen Modelle lie-gen, sind die Modelle dem Problem anzupassen und das Stromungspro-blem ist mit geanderten physikalischen Modellen erneut zu simulieren. EinBeispiel hierfur ware, dass das Modell fur die Schubspannung, respektivedie Viskositat, nur in einem eingeschrankten Temperaturbereich gultig ist,jedoch die Losung ausserhalb dieses Bereichs liegt.
[Boh81] G. Bohme. Stromungsmechanik nicht-newtonscher Fluide. Teubner,Stuttgart, 1981.
[ERC] ERCOFTAC. Best Practice Guidelines for Industrial ComputationalFluid Dynamics. http://www.ercoftac.org.
[QNE] QNET-CFD. QNET-CFD Network Newsletter. http://www.qnet-cfd.net.
[Sch99] M. Schafer. Numerik im Maschinenbau. Springer, Berlin, 1999.
Wintersemester 2007/2008

11
Kapitel 2
Grundgleichungen und abgeleitete Gleichungen
Im folgenden werden die Grundgleichungen der Fluiddynamik und einige haufi-ger benutzte abgeleitete Gleichungen zusammengestellt. Zur Herleitung wirdauf die Literatur verwiesen [TAP97, SK80, KC02]. Ferner werden Aussagenzur Typklassifizierung partieller Differentialgleichungen wiedergegeben, die furdie sachgemasse mathematische Formulierung von Stromungsproblemen wich-tig sind.
2.1 Navier-Stokes-Gleichungen und Euler-Gleichungen
Man bezeichnet die differentiellen Erhaltungsgesetze fur Masse, Impuls undEnergie fur ein Newtonsches Fluid mit einem linearen Ansatz fur die Schub-spannungen und fur die Warmeleitung (Ansatz von Fourier) oft auch generellals Navier-Stokes-Gleichungen. Manchmal wird diese Bezeichnung auch im en-geren Sinn lediglich fur die Impulserhaltungsgleichungen verwendet. Die kom-pressiblen Navier-Stokes-Gleichungen lassen sich in kompakter Form schreibenals
∂U
∂t+∂(F − F d)
∂x1+∂(G−Gd)
∂x2+∂(H −Hd)
∂x3= f , (2.1)
wobei mit xi die Koordinatenrichtungen bezeichnet werden. In (2.1) sind fol-gende Definitionen verwendet:
Vektor der Erhaltungsgrossen
U = (, u, v, w, E)T , (2.2a)
konvektiver Fluss in x1
F = (u, u2 + p, uv, uw, u(E + p))T , (2.2b)
Wintersemester 2007/2008

2.1 Navier-Stokes-Gleichungen und Euler-Gleichungen 12
konvektiver Fluss in x2
G = (v, vu, v2 + p, vw, v(E + p))T , (2.2c)
konvektiver Fluss in x3
H = (w, wu, wv, w2 + p, w(E + p))T , (2.2d)
diffusiver Fluss in x1
F d = (0, τ11, τ21, τ31,∑3
k=1 ukτk1 − q1)T , (2.2e)
diffusiver Fluss in x2
Gd = (0, τ12, τ22, τ32,∑3
k=1 ukτk2 − q2)T , (2.2f)
diffusiver Fluss in x3
Hd = (0, τ13, τ23, τ33,∑3
k=1 ukτk3 − q3)T , (2.2g)
volumenspezifische Massenquelle oder -senke, volumenspezifische Mas-senkraft, volumenspezifische Energiequelle oder -senke
f . (2.2h)
Mit ρ wird die Dichte bezeichnet, mit u der Geschwindigkeitsvektor (u, v, w),mit E = (e+u2/2) die Totalenergie, e ist die massenspezifische innere Energie.
Zwischen den thermodynamischen Zustandsgrossen bestehen folgende Bezie-hungen:
Zustandsgleichung des thermisch idealen Gases
p
= RT , (2.3a)
Zustandsgleichung des kalorisch idealen Gases cv = 0
e = cv T . (2.3b)
29. November 2007

13 2 Grundgleichungen und abgeleitete Gleichungen
Fur den Spannungstensor eines Newtonschen Fluids gilt unter Annahme derStokes’schen Hypothese:
τ = µ(∇u+ (∇u)T
)− 2
3µ divu I . (2.4a)
Fur den Warmeleitungsvektor gilt der Ansatz (nach Fourier)
q = −κ∇T , (2.4b)
wobei mit κ die Warmeleitfahigkeit bezeichnet wird.Wenn keine Quellterme vorhanden sind, und man ausserdem die Reibung
vernachlassigen kann (z. B. fur Stromungen mit sehr hoher Reynoldszahl ineiniger Entfernung von festen Wanden), kann man (2.1) vereinfachen zu densogenannten Eulergleichungen
∂U
∂t+∂F
∂x1+∂G
∂x2+∂H
∂x3= 0 . (2.5)
Wenn man an Ausbreitungen von kleinen Storungen eines gegebenen Grund-zustandes interessiert ist, kann man (2.5) um diesen Zustand linearisieren. Be-zeichnet man den Grundzustand als u0 = 0, p0, ρ0, die Storgrossen als u′, p′, ρ′,dann erhalt man (hier fur eine Raumdimension) die linearisierten Eulergleichun-gen
∂′
∂t+ 0
∂u′
∂x= 0 (2.6a)
∂u′
∂t+
1
0
∂p′
∂x= 0 (2.6b)
1
p0
∂p′
∂t− γ
0
∂′
∂t= 0 . (2.6c)
Man erhalt aus diesen Gleichungen ausserdem eine Wellengleichung fur dieGeschwindigkeitsfluktuation
∂2u′
∂t2− γ
p0
0
∂2u′
∂x2= 0 . (2.7)
Wenn die substantielle Ableitung der Dichte Dρ/Dt = ∂ρ∂t + u∇ρ = 0 ist,
d. h. die Dichte eines Fluidpartikels sich entlang seiner Bahn nicht andert, spricht
Wintersemester 2007/2008

2.2 Laplace-Gleichung und Poisson-Gleichung 14
man von einer inkompressiblen Stromung. Nimmt man weiterhin die Stoffeigen-schaften ν und κ als konstant an, vereinfacht sich (2.1) zu
∇u = 0 (2.8a)
Du
Dt= −1
∇p+ ν∆u+ f (2.8b)
DT
Dt=
κ
cp∆T (2.8c)
mit dem Warmeubergangskoeffizienten κ/(cp). Man beachte, dass nicht not-wendigerweise ∇ρ = 0. In einem inkompressiblen Fluid behalt lediglich jedesFluidelement seine Dichte bei. Konvektion und Diffusion von Warme wird durchGleichung (2.8c) beschrieben, welche uber das Geschwindigkeitsfeld u und ggf.in f enthaltene Auftriebskrafte mit (2.8a), (2.8b) gekoppelt ist. Die Gleichun-gen (2.8a) und (2.8b) konnen jedoch unabhangig von (2.8c) berechnet werden.
2.2 Laplace-Gleichung und Poisson-Gleichung
Eine weitere Vereinfachung der Bewegungsgleichungen wird erreicht, wenn maneine (bis auf isolierte Punkte oder Kurven) drehungsfreie, reibungsfreie undbarotrope Stromung annimmt. In diesem Falle ist die Geschwindigkeit gleichdem Gradienten eines Potentialfeldes, u = ∇Φ (Potentialstromung). Fur Φerhalt man eine Form der Bernoulli-Gleichung fur ein kompressibles Fluid
∂Φ
∂t+
1
2|∇Φ|2 +
∫dp
= g(t) . (2.9)
Nimmt man an, dass ∇u = 0 (inkompressibel), erhalt man die Potentialglei-chung
∆Φ = 0 . (2.10)
Fur den Fall einer kompressiblen, stationaren Stromung kann man die um ei-ne konstante Anstromung U∞ linearisierte Potentialgleichung fur Storungen φherleiten
(1 − Ma2∞)
∂2φ
∂x2+∂2φ
∂y2= 0 , (2.11)
29. November 2007
15 2 Grundgleichungen und abgeleitete Gleichungen
wobei Ma∞ = U∞/√γp∞/ρ∞ die Machzahl der Anstromung fur ein ideales
Gas ist. Beachte, dass Gleichung (2.11) je nach Ma∞ den Gleichungstypwechseln kann (siehe auch Abschnitt 2.5):
Elliptischer Typ: Ma∞ < 1 (Unterschallstromung)
Hyperbolischer Typ: Ma∞ > 1 (Uberschallstromung) .
Offenbar sind die Laplace-Gleichung
∆φ = 0 (2.12)
und die Poisson-Gleichung
∆φ = h (2.13)
von grosser Bedeutung fur die Fluiddynamik. Die Losung der Poisson-Gleichungist ein wichtiger Bestandteil von Losungsalgorithmen fur die inkompressiblenNavier-Stokes-Gleichungen (siehe Abschnitt 5). Diese Gleichungen sind vomelliptischen Typ.
2.3 Diffusionsgleichung und Grenzschichtgleichungen
Gleichungen, welche Ausgleichs- oder Diffusionsprozesse beschreiben, sind meistvom parabolischen Typ. Beispiele sind die Warmeleitungsgleichung
∂T
∂t=
κ
ρcp∇2T (2.14)
mit der Warmeleitfahigkeit κ und die Stofftransportgleichung mit dem Fick-schen Gesetz fur die Diffusion
∂cA∂t
= DAB∇2cA , (2.15)
worin cA die Konzentration des Stoffes A ist und DAB den Diffusionskoeffizi-enten des Stoffes A durch den Stoff B bezeichnet.
Fur den Grenzfall Re → ∞ kann man die Prandtlschen Grenzschichtglei-chungen herleiten. Sie lauten im stationaren Fall (hier um die Temperaturglei-chung (2.16d) erweitert angegeben)
∂u
∂x+∂v
∂y= 0 (2.16a)
Wintersemester 2007/2008
2.4 Advektionsgleichung und Wellengleichung 16
∂p
∂y= 0 (2.16b)
u∂u
∂x+ v
∂u
∂y= −1
∂p
∂x+ ν
∂2u
∂y2(2.16c)
u∂T
∂x+ v
∂T
∂y=
κ
cp
∂2T
∂y2. (2.16d)
2.4 Advektionsgleichung und Wellengleichung
Werden die Eulergleichungen (2.5) ohne Druckgradient mit u0 6= 0 linearisiert,bekommt man fur die Impulsgleichung
∂u′
∂t+ u0
∂u′
∂x= 0 , (2.17)
die sogenannte Advektionsgleichung. Diese Gleichung ist von eminenter Bedeu-tung als Testgleichung fur numerische Verfahren zur Losung der Euler- oderder Navier-Stokes-Gleichungen. Die Wellengleichung fur die Ausbreitung vonFluktuationen einer Grosse q in einem ruhenden Medium wurde bereits in (2.7)angegeben. Man kann sie allgemein schreiben als
∂2q
∂t2− a2 ∂
2q
∂x2= 0 , (2.18)
wobei a die Ausbreitungsgeschwindigkeit der Wellenlosung dieser Gleichung ist.
2.5 Typklassifizierung partieller Differentialgleichungen
Man definiert ein sachgemass gestelltes Problem fur ein System von (i.a. parti-ellen) Differentialgleichung folgendermassen.
Definition 1. Ein System von Differentialgleichungen und die dazugehorigenZusatzbedingungen (Rand- und Anfangsbedingungen) konstituieren ein (im ma-thematischen Sinne) sachgemass gestelltes Problem (engl. well-posed problem),wenn die folgenden drei Bedingungen erfullt sind:
(1) Es existiert eine Losung.
(2) Die Losung ist eindeutig.
29. November 2007
17 2 Grundgleichungen und abgeleitete Gleichungen
(3) Die Losung hangt stetig von den Anfangs- und Randdaten ab.
Wenn die sachgemasse Stellung eines Problems untersucht werden soll, istes erforderlich, den Typ der zugrundeliegenden Differentialgleichung zu bestim-men. Dieser entscheidet daruber, wie Anfangs- bzw. Randbedingungen sach-gemass zu stellen sind.
Lineare partielle Differentialgleichung erster Ordnung
Betrachten wir zunachst die lineare partielle Differentialgleichung erster Ord-nung fur eine skalare Grosse u(x, t)
A∂u
∂t+B
∂u
∂x= C . (2.19)
Wahlt man eine Parametrisierung s einer Kurve in der (x, t)-Ebene, also x =x(s), t = t(s), so erhalt man fur die Ableitung von u entlang der Kurve
du
ds=∂u
∂t
dt
ds+∂u
∂x
dx
ds. (2.20)
Wahlt man z. B. als Parametrisierung der Kurve die Variable t, so geht (2.20)uber in
du
dt
∣∣∣∣x(t)
=∂u
∂t+∂u
∂x
dx
dt. (2.21)
Vergleicht man die Gleichung (2.21) mit der Ausgangsgleichung (2.19), so findetman, dass wenn
dx
dt=B
A(2.22a)
ist, auch
du
dt
∣∣∣∣x(t)
=C
A(2.22b)
gilt. Die Ableitung dx/dt definiert die charakteristische Kurve oder Charakte-ristik x(t) der Gleichung (2.19). Die partielle Differentialgleichung 1. Ordnung,Gl. (2.19), wurde somit in ein System von zwei gewohnlichen Differentialglei-chungen 1. Ordnung (2.22) uberfuhrt.
Wintersemester 2007/2008
2.5 Typklassifizierung partieller Differentialgleichungen 18
Lineare partielle Differentialgleichung zweiter Ordnung
Wir betrachten nun die lineare partielle Differentialgleichung zweiter Ordnungfur u(x, y) in den zwei unabhangigen Variablen x, y
A∂2u
∂x2+ B
∂2u
∂x∂y+ C
∂2u
∂y2+ H = 0 . (2.23)
In Gleichung (2.23) sind A,B,C gegebene Koeffizienten, der Term H enthaltalle Differentiale, deren Ordnung kleiner als zwei ist. Sei nun durch yc(x) ei-ne Kurve in der (x, y)-Ebene gegeben, deren Steigung dyc/dx = λ betragt.Differenziert man die partiellen Ableitungen (∂u/∂x) und (∂u/∂y) langs dieserKurve, so ergibt sich nach Kettenregel:
d(∂u/∂x)
dx=
∂2u
∂x2+
∂2u
∂x∂yλ (2.24a)
d(∂u/∂y)
dx=
∂2u
∂x∂y+∂2u
∂y2λ . (2.24b)
Mit Hilfe dieser beiden Beziehungen lassen sich die Terme (∂2u/∂x2) und(∂2u/∂y2) in Gleichung (2.23) eliminieren, und man erhalt
∂2u
∂x∂y
[Aλ2 −Bλ+ C
]−[A
d(∂u/∂x)
dx+ H
]λ + C
d(∂u/∂y)
dx
= 0 .
(2.25)
Wird die Kurve yc(x) derart gewahlt, dass ihre Steigung λ die quadratischeGleichung
Aλ2 −Bλ+ C = 0 (2.26)
erfullt, so reduziert sich (2.25) auf[A
d(∂u/∂x)
dx+ H
]λ + C
d(∂u/∂y)
dx= 0. (2.27)
Die aus den beiden Losungen λ1,2 von (2.26) entstehenden Kurvenscharenyc1,2
(x) werden die Charakteristiken der Gleichung (2.25) genannt. Die par-tielle Differentialgleichung (2.23) kann durch die Einfuhrung dieser Charak-teristiken in ein System von zwei gekoppelten gewohnlichen Differentialglei-chungen fur (∂u/∂x) und (∂u/∂y) langs der Kurven yc(x) uberfuhrt werden.
29. November 2007

19 2 Grundgleichungen und abgeleitete Gleichungen
Anhand der Charakteristiken lasst sich die Typunterscheidung der Differential-gleichung (2.23) vornehmen.
Definition 2. Die partielle Differentialgleichung zweiter Ordnung (2.23) ist
(1) hyperbolisch, wenn zwei reelle Charakteristiken existieren (B2−4AC > 0)
(2) parabolisch, wenn eine reelle Charakteristik existiert (B2 − 4AC = 0)
(3) elliptisch, wenn die Charakteristiken komplex sind (B2 − 4AC < 0).
System linearer partieller Differentialgleichungen erster Ordnung
Wir betrachten nun das System linearer partieller Differentialgleichungen ersterOrdnung in den zwei Variablen x, y mit n× n-Matrizen A, B
A∂u
∂x+ B
∂u
∂y= c . (2.28)
Gegeben sei eine Kurve f(x, y) = 0 in der (x, y)-Ebene mit der Parametrisierungs, also x = x(s), y = y(s). Dann erhalt man fur die Ableitung von u entlangdieser Kurve
du
ds=∂u
∂x
dx
ds+∂u
∂y
dy
ds. (2.29)
Wahlt man als Parametrisierung der Kurve s = x, so geht das System (2.29)entlang der Kurve f(x, y) = 0 uber in
du
dx
∣∣∣∣f
=∂u
∂x+
dy
dx
∣∣∣∣f
∂u
∂y. (2.30)
Das Differentialgleichungssystem (2.28) wird dann
(B − λA)∂u
∂y= −A du
dx
∣∣∣∣f
+ c , (2.31)
wobei
λ =dy
dx
∣∣∣∣f
.
Wintersemester 2007/2008
2.5 Typklassifizierung partieller Differentialgleichungen 20
Man sucht nun nach solchen Kurven, in deren Umgebung die Losung u nichteindeutig durch die Kenntnis von u entlang der Kurve bestimmt ist. Das ist derFall, wenn mit der Kenntnis von du/dx|f der Wert von ∂u/∂y nicht eindeutigaus Gleichung (2.31) bestimmt werden kann. Aus Gleichung (2.31) erkenntman, dass dies der Fall ist, wenn λ so gewahlt wird, dass
Det(B − λA) = 0 . (2.32)
Dann hat Gleichung (2.31) entweder beliebig viele Losungen oder keine Losung,je nach Beschaffenheit der rechten Seite.
Die Kurven f(x, y) = 0 mit dy/dx = λ nennt man die Charakteristikendes Systems (2.28), wenn Gleichung (2.32) erfullt ist. Infolge der Unbestimmt-heit von ∂u/∂y nach Gleichung (2.31) entlang der Charakteristiken kann dieLosung u eine Unstetigkeit uber eine Charakteristik hinweg aufweisen. Eine Cha-rakteristik kann daher zum Beispiel einen Bereich mit konstanter Losung voneinem Bereich mit einer nichtkonstanten Losung trennen. Dieses Verhalten ei-ner Losung nennt man hyperbolisch. Losungen von hyperbolischen Gleichungenhaben Wellencharakter, d. h. sie verhalten sich qualitativ ahnlich zu der Losungder Wellengleichung.
Die Ordnung der charakteristischen Gleichung (2.32) entspricht der Dimen-sion n der Koeffizientenmatrizen, es gibt also n Eigenwerte.
Definition 3. Man unterscheidet fur die Gleichung (2.28) folgende Falle unddefiniert aufgrund der Eigenwerte von Gleichung (2.32):
(1) Es gibt n reelle Eigenwerte und n linear unabhangige Eigenvektoren. Dannnennt man (2.28) hyperbolisch.
(2) Es gibt n reelle Eigenwerte und weniger als n linear unabhangige Eigen-vektoren. Dann nennt man (2.28) parabolisch.
(3) Es gibt n komplexe (nicht reelle) Eigenwerte. Dann nennt man (2.28)elliptisch.
(4) Wenn reelle und komplexe Eigenwerte vorliegen, dann ist (2.28) vomgemischten Typ. Sei z. B. n = 3 und λ1 = 1, λ2 = i, λ3 = −i, dannist (2.28) vom Typ gemischt hyperbolisch/elliptisch.
Losungen elliptischer Gleichungen sind in der Regel stetig. Sie haben kei-nen Ausbreitungscharakter, sondern Potentialcharakter, d. h. eine lokale Storungwirkt sich sofort im ganzen Losungsgebiet aus. Parabolische Gleichungen haben
29. November 2007
21 2 Grundgleichungen und abgeleitete Gleichungen
Warmeleitungscharakter, stellen also einen ausgleichenden, nicht wellenartigenAusbreitungsprozess dar.
Wenn das auftretende partielle Differentialgleichungssystem quasilinear ist,d. h. wenn A und B ausser von x und y auch von u (aber nicht von den Ablei-
tungen von u) abhangen, dann ubertragt man obige Uberlegung unmittelbar,indem man nur die Losung in einer Umgebung eines Punktes (x, y) betrach-tet (man linearisiert das Gleichungssystem). λ wird dann im allgemeinen eineFunktion von u. Die Klassifikation entspricht unmittelbar derjenigen fur lineareSysteme aus Definition 3.
In den folgenden Abschnitten betrachten wir elliptische, parabolische undhyperbolische Differentialgleichungen und ihre Anfangs- und Randbedingungen.
2.5.1 Elliptische partielle Differentialgleichungen
Statische physikalische Phanomene konnen oft durch elliptische Differentialglei-chungen beschrieben werden. Die wichtigsten Beispiele elliptischer Differential-gleichungen in zwei Dimensionen sind die Poisson-Gleichung
∂2u
∂x2+∂2u
∂y2= f (2.33)
und die Laplace-Gleichung oder Potentialgleichung
∂2u
∂x2+∂2u
∂y2= 0 . (2.34)
Die Losungen der Laplace-Gleichung bezeichnet man auch als harmonischeFunktionen oder Potentialfunktionen (siehe Funktionentheorie). In zwei Dimen-sionen sind die Losungen der Laplace-Gleichung gegeben durch die Realteile(oder Imaginarteile) analytischer Funktionen der komplexen Variable z = x+iy.
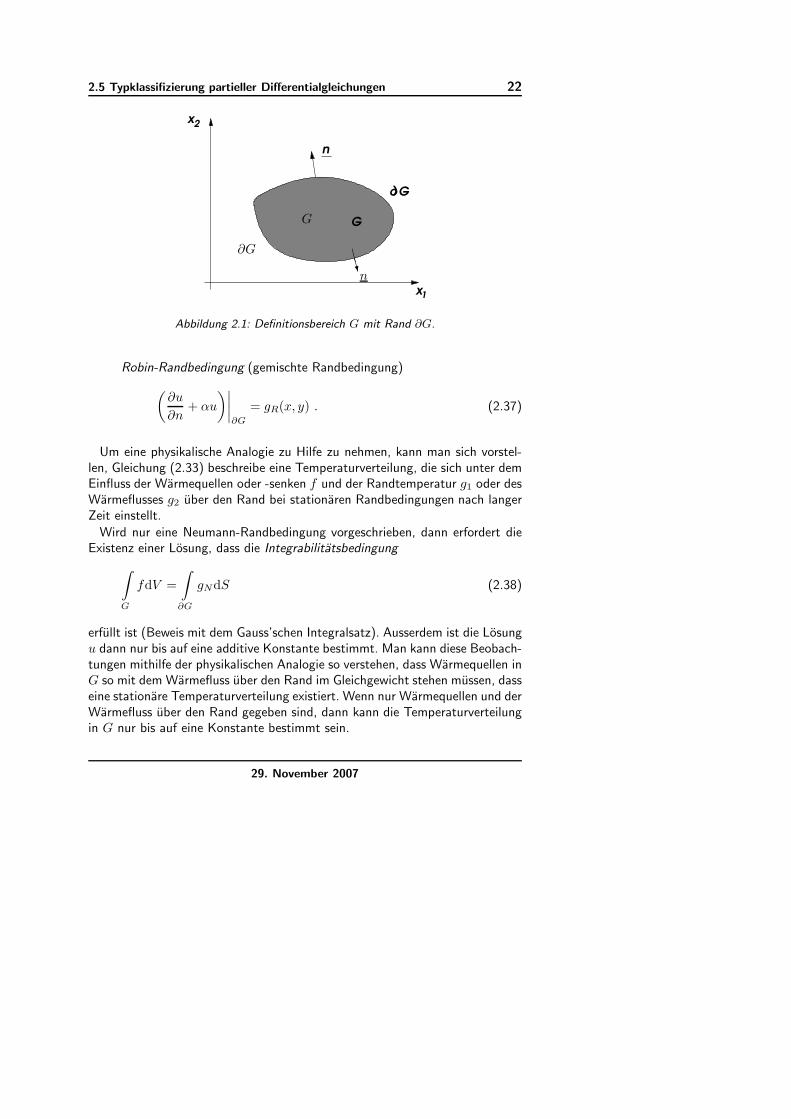
Folgende Typen von Randbedingungen konnen auf dem Rand ∂G oder aufAbschnitten des Randes vorgeschrieben werden, wobei in jedem Randpunktgenau eine Randbedingung vorgeschrieben sein muss (siehe Figur 2.1):
Dirichlet-Randbedingung
u|∂G = gD(x, y), (2.35)
Neumann-Randbedingung
∂u
∂n
∣∣∣∣∂G
= gN (x, y), (2.36)
Wintersemester 2007/2008
2.5 Typklassifizierung partieller Differentialgleichungen 22
o)
x
x
G
G
1
2
n
G
∂GCCWn
Abbildung 2.1: Definitionsbereich G mit Rand ∂G.
Robin-Randbedingung (gemischte Randbedingung)
(∂u
∂n+ αu
)∣∣∣∣∂G
= gR(x, y) . (2.37)
Um eine physikalische Analogie zu Hilfe zu nehmen, kann man sich vorstel-len, Gleichung (2.33) beschreibe eine Temperaturverteilung, die sich unter demEinfluss der Warmequellen oder -senken f und der Randtemperatur g1 oder desWarmeflusses g2 uber den Rand bei stationaren Randbedingungen nach langerZeit einstellt.
Wird nur eine Neumann-Randbedingung vorgeschrieben, dann erfordert dieExistenz einer Losung, dass die Integrabilitatsbedingung
∫
G
fdV =
∫
∂G
gNdS (2.38)
erfullt ist (Beweis mit dem Gauss’schen Integralsatz). Ausserdem ist die Losungu dann nur bis auf eine additive Konstante bestimmt. Man kann diese Beobach-tungen mithilfe der physikalischen Analogie so verstehen, dass Warmequellen inG so mit dem Warmefluss uber den Rand im Gleichgewicht stehen mussen, dasseine stationare Temperaturverteilung existiert. Wenn nur Warmequellen und derWarmefluss uber den Rand gegeben sind, dann kann die Temperaturverteilungin G nur bis auf eine Konstante bestimmt sein.
29. November 2007
23 2 Grundgleichungen und abgeleitete Gleichungen
Ein Merkmal der Losungen u elliptischer Gleichungen ist, dass u glatter istals f oder gD, gN , gR: z. B. wenn f ∈ Cs, dann ist u ∈ Cs+2 fur eine Glei-chung zweiter Ordnung. Losungen der Laplace-Gleichung sind sogar beliebig oftdifferenzierbar (f ∈ Cs bedeutet, dass f s-mal stetig differenzierbar ist).
Alle oben genannten Randbedingungen erzeugen im allgemeinen”gutmutige“
Losungen auch fur allgemeinere elliptische Differentialgleichungen in der Nahevon glatten Abschnitten der Berandung. In Randpunkten, in denen der Typ derRandbedingung wechselt, oder in denen die Berandung nicht glatt ist, konnensich Singularitaten in der Losung bzw. ihren Ableitungen ausbilden.
Fur lineare elliptische Differentialgleichungen zweiter Ordnung gilt ein Ma-ximumprinzip: betrachtet man die Poisson-Gleichung (2.33), und erfullt u dieBedingung
∂2u
∂x2+∂2u
∂y2≥ 0
auf einem beschrankten Bereich G, dann nimmt u sein Maximum auf demRand ∂G an. Dies ist eine Verallgemeinerung der Aussage, dass eine Funktionu(x) einer Variablen mit u′′(x) > 0 auf einem abgeschlossenen Intervall ihrMaximum an einem Intervallende annimmt.
2.5.2 Parabolische partielle Differentialgleichungen
Ausgleichsvorgange werden in der Physik oft durch parabolische Differentialglei-chungen beschrieben. Die Warmeleitungsgleichung ist das wichtigste Beispiel:
∂u
∂t= b
∂2u
∂x2, (2.39)
wobei b eine positive Konstante ist. Die Losung des reinen Anfangswertpro-blems fur (2.39) auf dem unendlichen Intervall −∞ < x < ∞ veranschaulichtwichtige allgemeine Eigenschaften der Losungen parabolischer Gleichungen. Siewird erhalten durch Separation der Variablen und lautet
u(x, t) =1√2π
∫ +∞
−∞
e−ξ2bt︸ ︷︷ ︸
Dampfungsterm
u0(ξ) eiξx dξ , (2.40)
worin u0(ξ) die Fouriertransformierte der Anfangsbedingung u(x, 0) = u0(x)ist und ξ die Wellenzahl (Fourier-Dualvariable). Offenbar wird die Fouriertrans-formierte u(ξ) mit t → ∞ exponentiell gedampft, und zwar umso starker, je
Wintersemester 2007/2008
2.5 Typklassifizierung partieller Differentialgleichungen 24
grosser ξ2 ist. Kurzwellige Losungsanteile (mit grosser Wellenzahl ξ) klingenalso zeitlich schnell ab, sie werden
”dissipiert“. Dasselbe kann man auch er-
kennen, wenn man die Fouriertransformation in (2.40) invertiert, wodurch manerhalt
u(x, t) =1√4πbt
∫ +∞
−∞
e−(x−x′)2/(4bt)u0(x′)dx′ . (2.41)
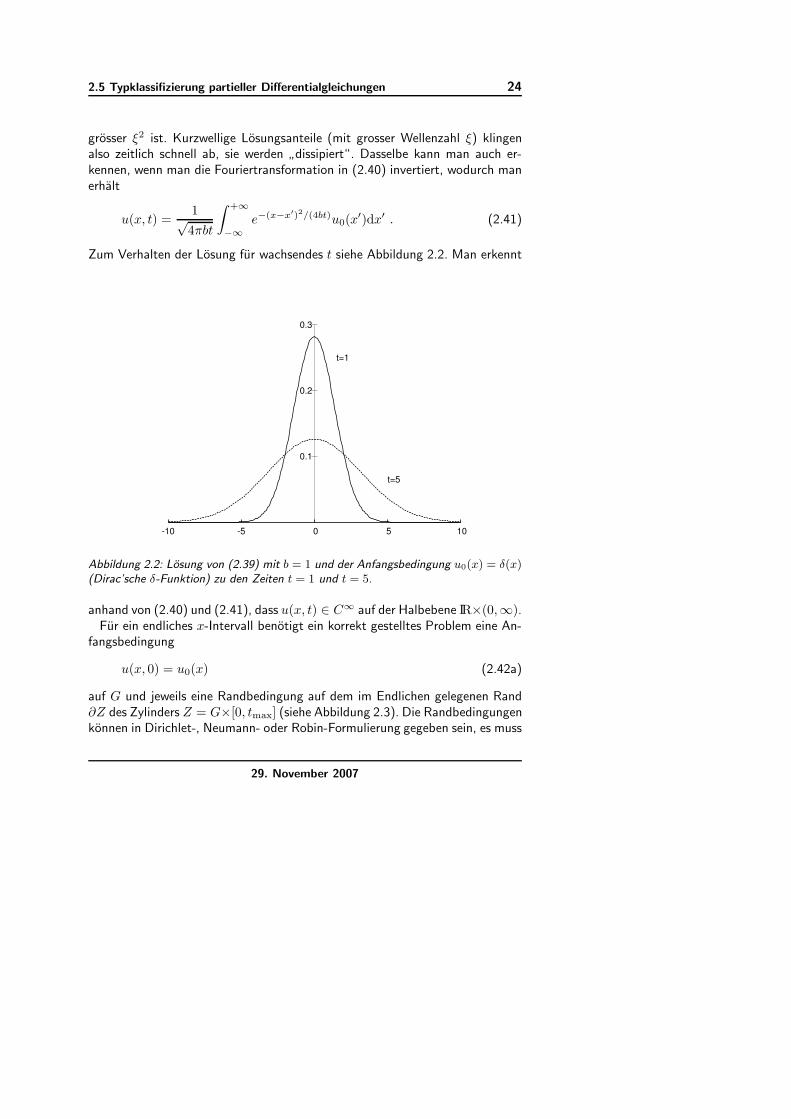
Zum Verhalten der Losung fur wachsendes t siehe Abbildung 2.2. Man erkennt
-10 -5 0 5 10
t=1
t=5
0.1
0.2
0.3
Abbildung 2.2: Losung von (2.39) mit b = 1 und der Anfangsbedingung u0(x) = δ(x)(Dirac’sche δ-Funktion) zu den Zeiten t = 1 und t = 5.
anhand von (2.40) und (2.41), dass u(x, t) ∈ C∞ auf der Halbebene IR×(0,∞).Fur ein endliches x-Intervall benotigt ein korrekt gestelltes Problem eine An-
fangsbedingung
u(x, 0) = u0(x) (2.42a)
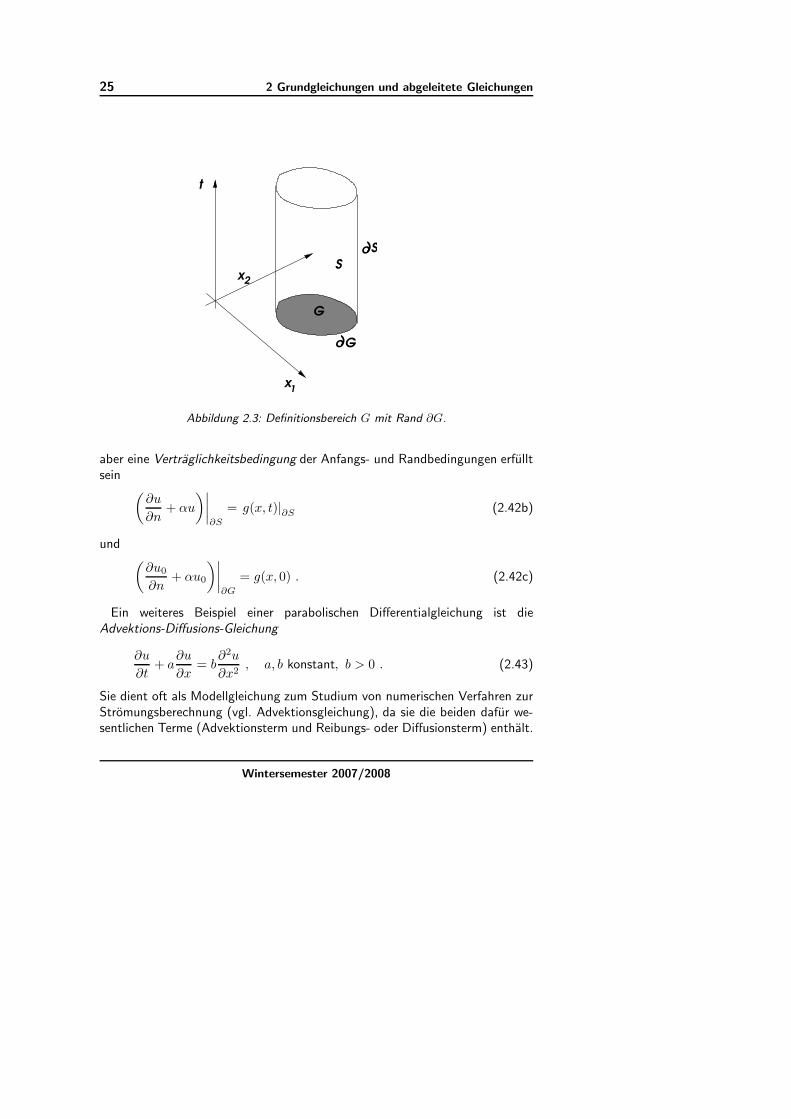
auf G und jeweils eine Randbedingung auf dem im Endlichen gelegenen Rand∂Z des Zylinders Z = G×[0, tmax] (siehe Abbildung 2.3). Die Randbedingungenkonnen in Dirichlet-, Neumann- oder Robin-Formulierung gegeben sein, es muss
29. November 2007
25 2 Grundgleichungen und abgeleitete Gleichungen
)o
)o
x
x
t
G
G
S
S
1
2
Abbildung 2.3: Definitionsbereich G mit Rand ∂G.
aber eine Vertraglichkeitsbedingung der Anfangs- und Randbedingungen erfulltsein
(∂u
∂n+ αu
)∣∣∣∣∂S
= g(x, t)|∂S (2.42b)
und(∂u0
∂n+ αu0
)∣∣∣∣∂G
= g(x, 0) . (2.42c)
Ein weiteres Beispiel einer parabolischen Differentialgleichung ist dieAdvektions-Diffusions-Gleichung
∂u
∂t+ a
∂u
∂x= b
∂2u
∂x2, a, b konstant, b > 0 . (2.43)
Sie dient oft als Modellgleichung zum Studium von numerischen Verfahren zurStromungsberechnung (vgl. Advektionsgleichung), da sie die beiden dafur we-sentlichen Terme (Advektionsterm und Reibungs- oder Diffusionsterm) enthalt.
Wintersemester 2007/2008

2.5 Typklassifizierung partieller Differentialgleichungen 26
Mittels der Transformation
ξ := x− at , w(ξ, t) := u(ξ + at, t)
kann (2.43) auf die Warmeleitungsgleichung
∂w
∂t= b
∂2w
∂ξ2(2.44)
in einem mit der konstanten Geschwindigkeit a bewegten Koordinatensystemzuruckgefuhrt werden.
Es gilt auch hier ein Maximumprinzip: die Losung einer linearen homogenenparabolischen Differentialgleichung 2. Ordnung, betrachtet auf dem beschrank-ten Gebiet (x, t) ∈ [a, b] × [0, T ], nimmt ihr Maximum auf den Linien t = 0,x = a, x = b an. Entsprechendes gilt fur das Minimum.
2.5.3 Hyperbolische partielle Differentialgleichungen
Hyperbolische partielle Differentialgleichungen beschreiben Ausbreitungs-vorgange mit Wellencharakter, bei denen keine Diffusion auftritt. Wichtige Bei-spiele sind:
(1) Lineare Advektionsgleichung:
∂u
∂t+ a
∂u
∂x= 0 , a = const.
(2) Wellengleichung:
∂2u
∂t2− b2
∂2u
∂x2= 0 , b = const.
(3) Lineares Differentialgleichungssystem:
∂
∂tu+A
∂
∂xu = 0 ,
wobei die n× n-Matrix A n reelle Eigenwerte hat.
29. November 2007
27 2 Grundgleichungen und abgeleitete Gleichungen
(4) Nichtlineare Differentialgleichung der Form:
∂u
∂t+∂f(u)
∂x= 0
(Erhaltungssatz, engl. conservation law), z. B. die Burgers-Gleichung mit
f(u) =u2
2.
2.5.3.1 Reines Anfangswertproblem fur die lineare Advektionsgleichung
Das Anfangswertproblem (auch Cauchy-Problem genannt) lautet
∂u
∂t+ a
∂u
∂x= 0 , u(x, 0) = u0(x) , −∞ < x < +∞ (2.45)
Mit der Anfangsbedingung ergibt sich die Losung der Differentialgleichung so-fort als
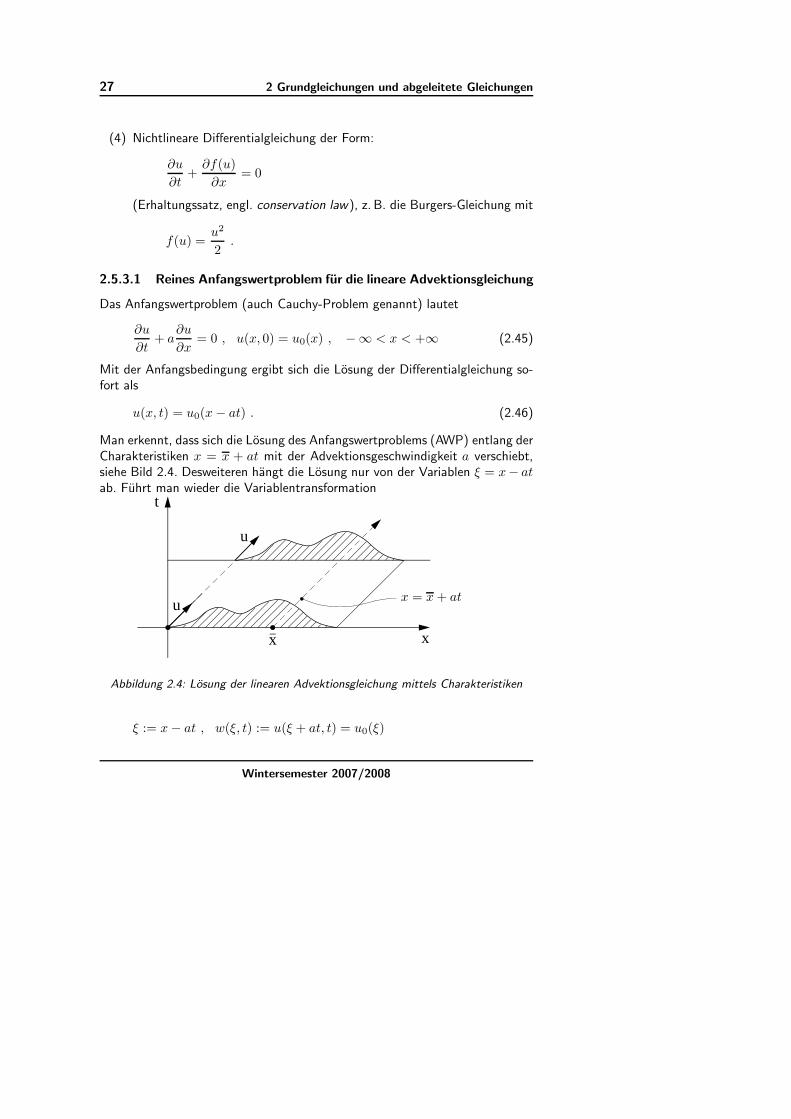
u(x, t) = u0(x− at) . (2.46)
Man erkennt, dass sich die Losung des Anfangswertproblems (AWP) entlang derCharakteristiken x = x + at mit der Advektionsgeschwindigkeit a verschiebt,siehe Bild 2.4. Desweiteren hangt die Losung nur von der Variablen ξ = x− atab. Fuhrt man wieder die Variablentransformation
t
x
u
u
x
x = x+ at
Abbildung 2.4: Losung der linearen Advektionsgleichung mittels Charakteristiken
ξ := x− at , w(ξ, t) := u(ξ + at, t) = u0(ξ)
Wintersemester 2007/2008

2.5 Typklassifizierung partieller Differentialgleichungen 28
durch, ergibt sich fur die zeitliche Anderung von w bei festem ξ
w
t
∣∣∣ξ
=∂u
∂t+ a
∂u
∂x= 0 . (2.47)
Die Losung u(x, t) ist also konstant auf den Charakteristiken ξ = const. DurchVergleich mit der Advektionsgleichung (2.45) erhalt man die gewohnlichen Dif-ferentialgleichungen
dx
dt
∣∣∣∣Ch
= a , x(t = 0) = x
und
du
dt= 0 , u(t = 0) = u0(x) ,
mit den Losungen
x(t) = x+ at , u(t) = u0(x) .
Bemerkungen zum reinen Anfangswertproblem fur die lineare Advektionsglei-chung:
(1) Wenn die Anfangsverteilung stetig ist, dann ist die Losung uberall stetig.
(2) Unstetigkeiten konnen sich fur eine lineare Advektionsgleichung nur ent-lang der Charakteristiken ausbreiten.
2.5.3.2 Anfangs-Randwert-Problem fur die lineare Advektionsgleichung
Betrachten wir nun das Anfangs-Randwert-Problem (ARWP) fur die lineareAdvektionsgleichung auf einem endlichen Bereich,
∂u
∂t+ a
∂u
∂x= 0 , x0 ≤ x ≤ x1 (2.48)
mit der Anfangsbedingung
u(x, 0) = u0(x) , x0 ≤ x ≤ x1 .
Im Falle a > 0 ist die Randbedingung am linken Rand vorzugeben,
u(x0, t) = g(t)
29. November 2007
29 2 Grundgleichungen und abgeleitete Gleichungen
t
xx0 1x
AB
RB
x = x0 + at
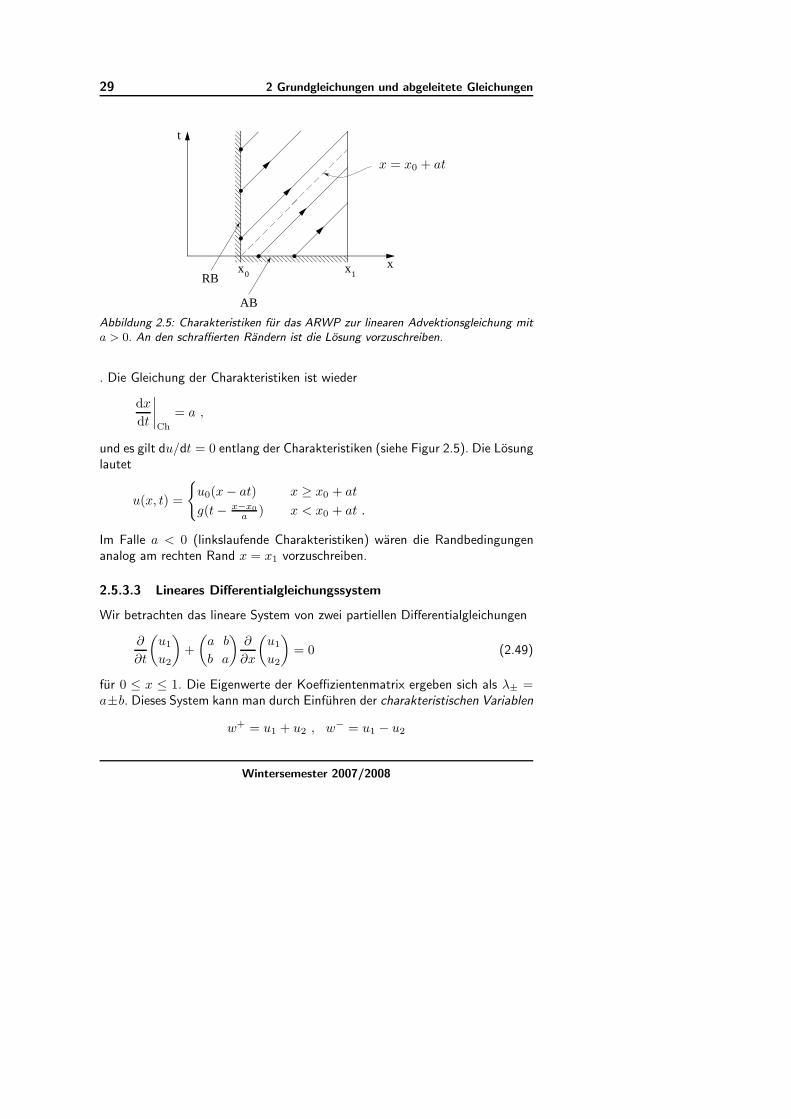
Abbildung 2.5: Charakteristiken fur das ARWP zur linearen Advektionsgleichung mita > 0. An den schraffierten Randern ist die Losung vorzuschreiben.
. Die Gleichung der Charakteristiken ist wieder
dx
dt
∣∣∣∣Ch
= a ,
und es gilt du/dt = 0 entlang der Charakteristiken (siehe Figur 2.5). Die Losunglautet
u(x, t) =
u0(x− at) x ≥ x0 + at
g(t− x−x0
a ) x < x0 + at .
Im Falle a < 0 (linkslaufende Charakteristiken) waren die Randbedingungenanalog am rechten Rand x = x1 vorzuschreiben.
2.5.3.3 Lineares Differentialgleichungssystem
Wir betrachten das lineare System von zwei partiellen Differentialgleichungen
∂
∂t
(u1
u2
)+
(a b
b a
)∂
∂x
(u1
u2
)= 0 (2.49)
fur 0 ≤ x ≤ 1. Die Eigenwerte der Koeffizientenmatrix ergeben sich als λ± =a±b. Dieses System kann man durch Einfuhren der charakteristischen Variablen
w+ = u1 + u2 , w− = u1 − u2
Wintersemester 2007/2008
2.5 Typklassifizierung partieller Differentialgleichungen 30
in zwei entkoppelte skalare Gleichungen in den charakteristischen Variablen w+,w− uberfuhren:
∂w+
∂t+ (a+ b)
∂w+
∂x= 0 (2.50a)
∂w−
∂t+ (a− b)
∂w−
∂x= 0 . (2.50b)
Entlang der Charakteristiken Ch+
dx
dt= a+ b gilt
dw+
dt= 0 ,
entsprechend entlang der Charakteristiken Ch−
dx
dt= a− b ,
dw−
dt= 0 .
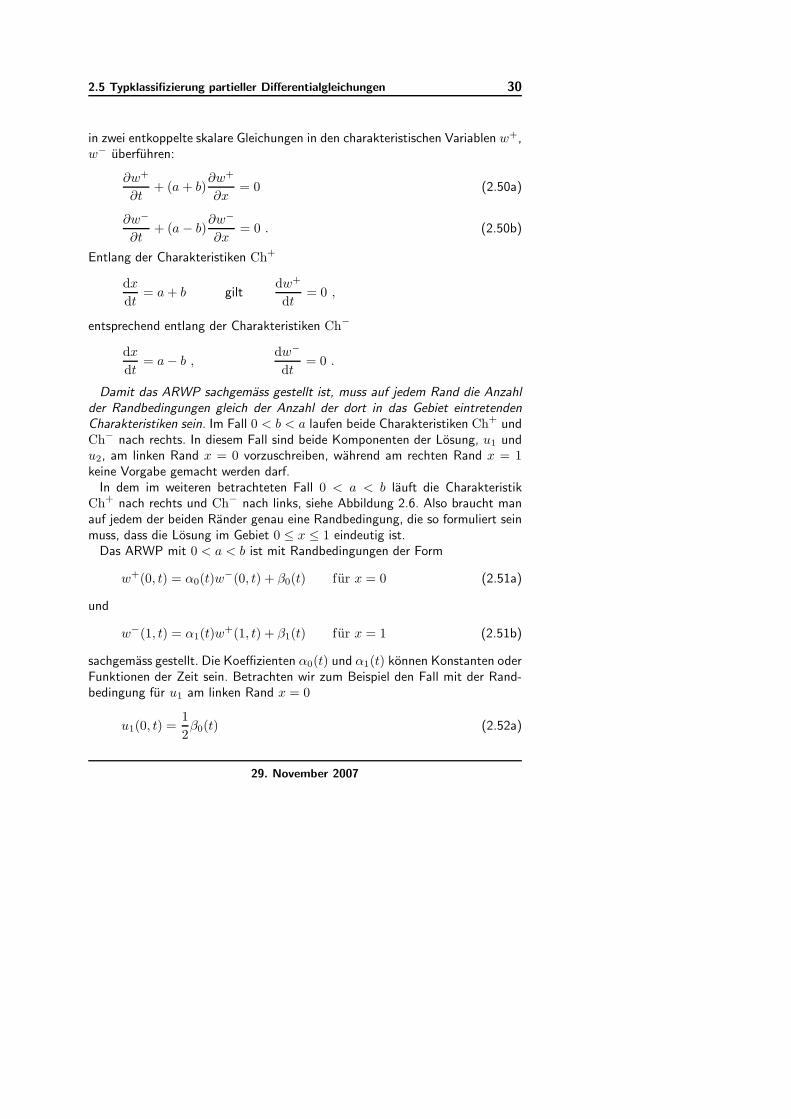
Damit das ARWP sachgemass gestellt ist, muss auf jedem Rand die Anzahlder Randbedingungen gleich der Anzahl der dort in das Gebiet eintretendenCharakteristiken sein. Im Fall 0 < b < a laufen beide Charakteristiken Ch+ undCh− nach rechts. In diesem Fall sind beide Komponenten der Losung, u1 undu2, am linken Rand x = 0 vorzuschreiben, wahrend am rechten Rand x = 1keine Vorgabe gemacht werden darf.
In dem im weiteren betrachteten Fall 0 < a < b lauft die CharakteristikCh+ nach rechts und Ch− nach links, siehe Abbildung 2.6. Also braucht manauf jedem der beiden Rander genau eine Randbedingung, die so formuliert seinmuss, dass die Losung im Gebiet 0 ≤ x ≤ 1 eindeutig ist.
Das ARWP mit 0 < a < b ist mit Randbedingungen der Form
w+(0, t) = α0(t)w−(0, t) + β0(t) fur x = 0 (2.51a)
und
w−(1, t) = α1(t)w+(1, t) + β1(t) fur x = 1 (2.51b)
sachgemass gestellt. Die Koeffizienten α0(t) und α1(t) konnen Konstanten oderFunktionen der Zeit sein. Betrachten wir zum Beispiel den Fall mit der Rand-bedingung fur u1 am linken Rand x = 0
u1(0, t) =1
2β0(t) (2.52a)
29. November 2007
31 2 Grundgleichungen und abgeleitete Gleichungen
t
x
x = 1x = 0
Ch+
Ch-
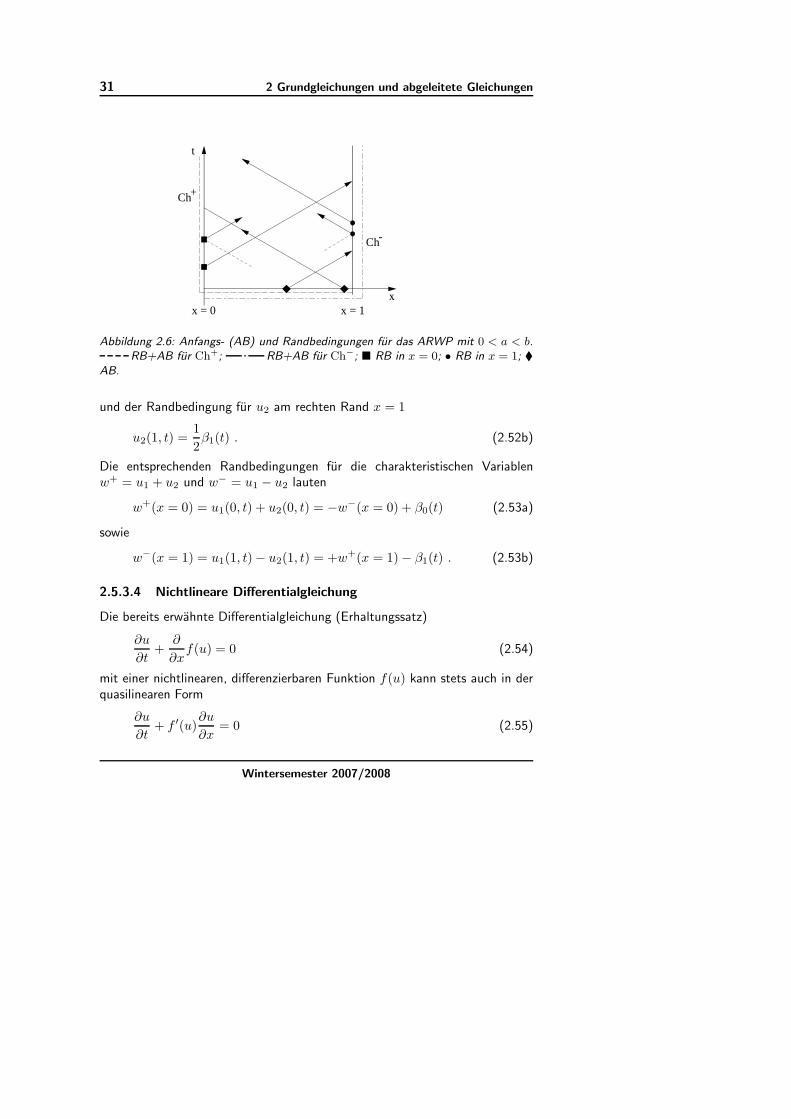
Abbildung 2.6: Anfangs- (AB) und Randbedingungen fur das ARWP mit 0 < a < b.RB+AB fur Ch+; RB+AB fur Ch−; RB in x = 0; • RB in x = 1;
AB.
und der Randbedingung fur u2 am rechten Rand x = 1
u2(1, t) =1
2β1(t) . (2.52b)
Die entsprechenden Randbedingungen fur die charakteristischen Variablenw+ = u1 + u2 und w− = u1 − u2 lauten
w+(x = 0) = u1(0, t) + u2(0, t) = −w−(x = 0) + β0(t) (2.53a)
sowie
w−(x = 1) = u1(1, t) − u2(1, t) = +w+(x = 1) − β1(t) . (2.53b)
2.5.3.4 Nichtlineare Differentialgleichung
Die bereits erwahnte Differentialgleichung (Erhaltungssatz)
∂u
∂t+
∂
∂xf(u) = 0 (2.54)
mit einer nichtlinearen, differenzierbaren Funktion f(u) kann stets auch in derquasilinearen Form
∂u
∂t+ f ′(u)
∂u
∂x= 0 (2.55)
Wintersemester 2007/2008

2.5 Typklassifizierung partieller Differentialgleichungen 32
geschrieben werden. Die Anfangsbedingung sei u(x, 0) = u0(x). Die Wellenge-schwindigkeit
a(u) := f ′(u)
hangt nun von der Losung u ab. Charakteristiken x(t) werden analog wie imlinearen Fall definiert durch
dx
dt= a(u(x, t)) , x(t = 0) = x . (2.56)
Die Losung u entlang einer Charakteristik ist wieder konstant, wie man durchBetrachtung der Zeitfunktion
v(t) := u(x(t), t)
und Berucksichtigung von (2.55) erkennt:
dv
dt=
dx
dt· ∂u∂x
+∂u
∂t=∂u
∂t+ f ′(u)
∂u
∂x= 0 .
Es folgt, dass die Charakteristiken (2.56) auch in diesem nichtlinearen Fall Ge-raden sind,
x(t) = x+ f ′(u0(x)) · t, (2.57)
deren Steigung durch die Anfangsdaten bestimmt ist. Abhangig von den An-fangsdaten kann es vorkommen, dass sich Charakteristiken nach einer endlichenZeit t = tb schneiden: die Eindeutigkeit der Losung geht dann verloren, die
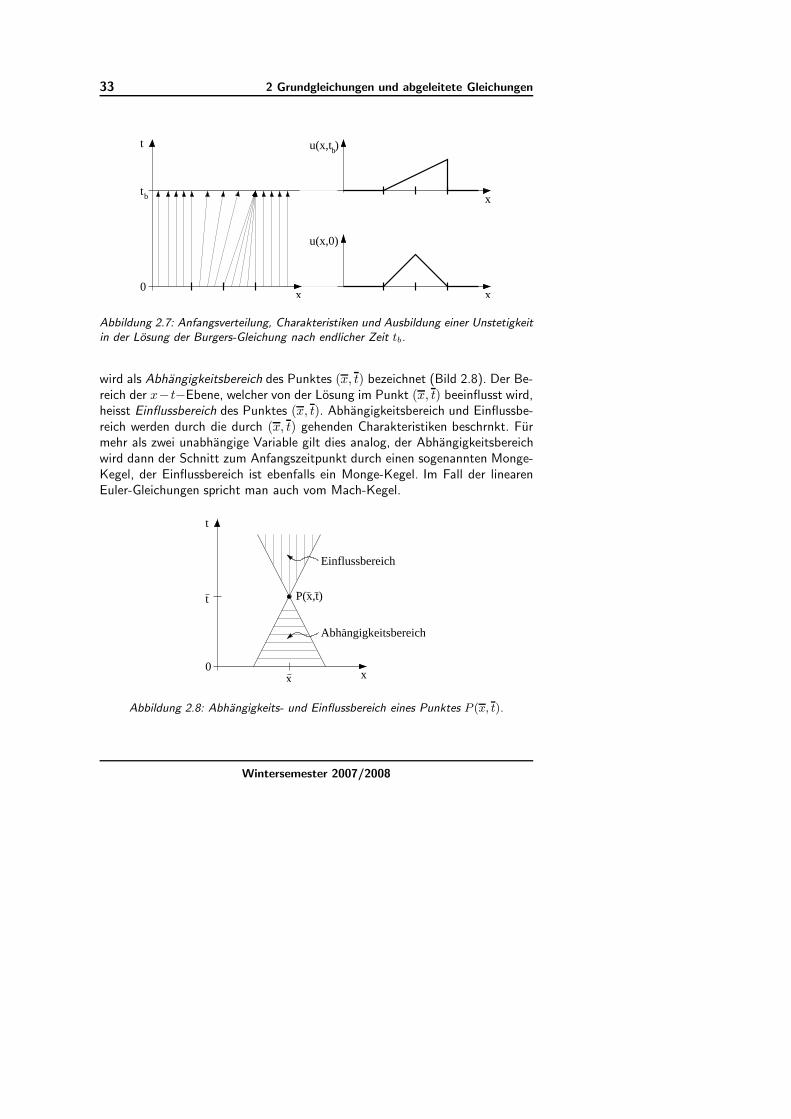
”Welle bricht“, es bildet sich eine Unstetigkeit (Stoss).Ein Beispiel fur die Burgers-Gleichung mit f(u) = u2/2 und stuckweiser
linearer Anfangsverteilung u0(x) ist in Abbildung 2.7 gezeigt. In diesem spe-ziellen Fall schneiden sich die in dem x-Intervall mit du0/dx < 0 startendenCharakteristiken alle gleichzeitig zu einer Zeit t = tb.
2.5.3.5 Abhangigkeits- und Einflussbereich
Charakteristisch fur eine hyperbolische Gleichung zweiter Ordnung oder ein Sy-stem von hyperbolischen Differentialgleichungen in den Variablen x, t ist, dassdie Losung u(x, t) in einem Punkt (x, t) nur von den Werten in einem endlichenx-Intervall zu einem gewahlten Anfangszeitpunkt t < t abhangt. Dieser Bereich
29. November 2007
33 2 Grundgleichungen und abgeleitete Gleichungen
bt
bu(x,t )t
x
xx0
u(x,0)
Abbildung 2.7: Anfangsverteilung, Charakteristiken und Ausbildung einer Unstetigkeitin der Losung der Burgers-Gleichung nach endlicher Zeit tb.
wird als Abhangigkeitsbereich des Punktes (x, t) bezeichnet (Bild 2.8). Der Be-reich der x−t−Ebene, welcher von der Losung im Punkt (x, t) beeinflusst wird,heisst Einflussbereich des Punktes (x, t). Abhangigkeitsbereich und Einflussbe-reich werden durch die durch (x, t) gehenden Charakteristiken beschrnkt. Furmehr als zwei unabhangige Variable gilt dies analog, der Abhangigkeitsbereichwird dann der Schnitt zum Anfangszeitpunkt durch einen sogenannten Monge-Kegel, der Einflussbereich ist ebenfalls ein Monge-Kegel. Im Fall der linearenEuler-Gleichungen spricht man auch vom Mach-Kegel.
x
t P(x,t)
t
x0
Abhangigkeitsbereich
Einflussbereich
Abbildung 2.8: Abhangigkeits- und Einflussbereich eines Punktes P (x, t).
Wintersemester 2007/2008

2.5 Typklassifizierung partieller Differentialgleichungen 34
[KC02] P. K. Kundu and I. M. Cohen. Fluid Mechanics. Academic Press, 2nd
edition, 2002.
[SK80] H. Schade and E. Kunz. Stromungslehre. de Gruyter, 1980.
[TAP97] J. C. Tannehill, D. A. Anderson, and R. H. Pletcher. ComputationalFluid Dynamics and Heat Transfer. Taylor & Francis, Washington,London, 2nd edition, 1997.
29. November 2007

35
Kapitel 3
Diskretisierungsverfahren
Die numerische Losung von Stromungsproblemen erfordert eine Diskretisierungdes Berechnungsgebietes und der Erhaltungsgleichungen. Fur die erstgenannteThematik der Gittergenerierung wird auf die einschlagige Literatur verwiesen.Einige wichtige Methoden fur die Diskretisierung der Erhaltungsgleichungenwerden in diesem Kapitel behandelt. Schliesslich werden allgemeine Grundbe-griffe von Diskretisierungsverfahren wie Konvergenz, Konsistenz und Stabilitatdiskutiert.
3.1 Finite-Differenzen-Verfahren
Bei Finite-Differenzen-Verfahren werden Ableitungen einer Funktion u(x) in ei-nem Punkt xi mit Hilfe von Funktionswerten uj = u(xj) auf einem diskretenGitter mit der, wenn nicht anders vermerkt, als konstant angenommenen Gitter-weite h an der Stelle xj in der Umgebung des Punktes xi approximiert. Formelnzur Approximation von Ableitungen lassen sich durch Taylorentwicklungen her-leiten. Fur reine Anfangswertprobleme definiert man das Rechengitter oft ein-fach als xj = jh mit j = . . . ,−2,−1, 0, 1, 2, . . .. Funktionen wie uj = u(xj),die nur auf den Gitterpunkten xj definiert sind, nennt man Gitterfunktionen.Die nachfolgend definierten Operatoren D−, D+ und D0 sind Approximationenfur die 1. Ableitung von u,
Dui ≈ u′(xi) =∂u
∂x
∣∣∣∣xi
.
Man spricht von einem Differenzenschema n-ter Ordnung, wenn fur den Ap-proximationsfehler gilt (jeweils fur den Grenzubergang h→ 0):
Dui − u′(xi) = O(hn) ,
d. h. der Fehler geht gegen Null mit der n-ten Potenz von h.
Wintersemester 2007/2008
3.1 Finite-Differenzen-Verfahren 36
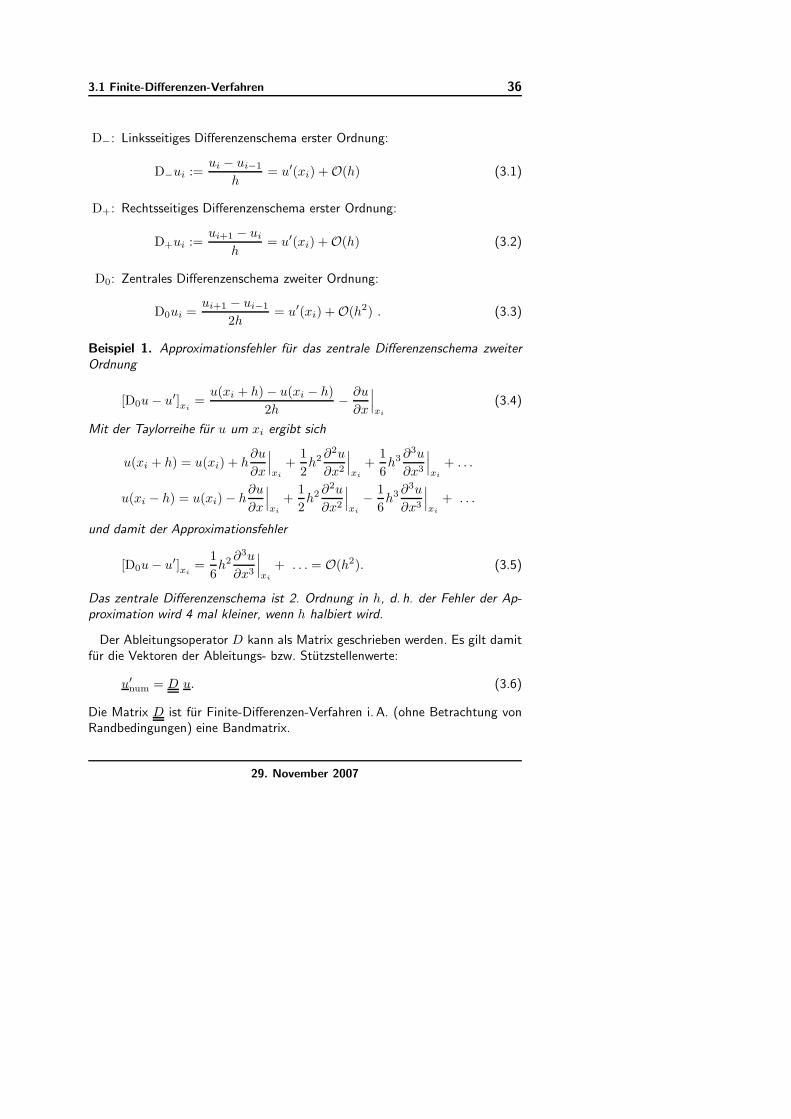
D−: Linksseitiges Differenzenschema erster Ordnung:
D−ui :=ui − ui−1
h= u′(xi) + O(h) (3.1)
D+: Rechtsseitiges Differenzenschema erster Ordnung:
D+ui :=ui+1 − ui
h= u′(xi) + O(h) (3.2)
D0: Zentrales Differenzenschema zweiter Ordnung:
D0ui =ui+1 − ui−1
2h= u′(xi) + O(h2) . (3.3)
Beispiel 1. Approximationsfehler fur das zentrale Differenzenschema zweiterOrdnung
[D0u− u′]xi=u(xi + h) − u(xi − h)
2h− ∂u
∂x
∣∣∣xi
(3.4)
Mit der Taylorreihe fur u um xi ergibt sich
u(xi + h) = u(xi) + h∂u
∂x
∣∣∣xi
+1
2h2 ∂
2u
∂x2
∣∣∣xi
+1
6h3 ∂
3u
∂x3
∣∣∣xi
+ . . .
u(xi − h) = u(xi) − h∂u
∂x
∣∣∣xi
+1
2h2 ∂
2u
∂x2
∣∣∣xi
− 1
6h3 ∂
3u
∂x3
∣∣∣xi
+ . . .
und damit der Approximationsfehler
[D0u− u′]xi=
1
6h2 ∂
3u
∂x3
∣∣∣xi
+ . . . = O(h2). (3.5)
Das zentrale Differenzenschema ist 2. Ordnung in h, d. h. der Fehler der Ap-proximation wird 4 mal kleiner, wenn h halbiert wird.
Der Ableitungsoperator D kann als Matrix geschrieben werden. Es gilt damitfur die Vektoren der Ableitungs- bzw. Stutzstellenwerte:
u′num = D u. (3.6)
Die Matrix D ist fur Finite-Differenzen-Verfahren i. A. (ohne Betrachtung vonRandbedingungen) eine Bandmatrix.
29. November 2007
37 3 Diskretisierungsverfahren
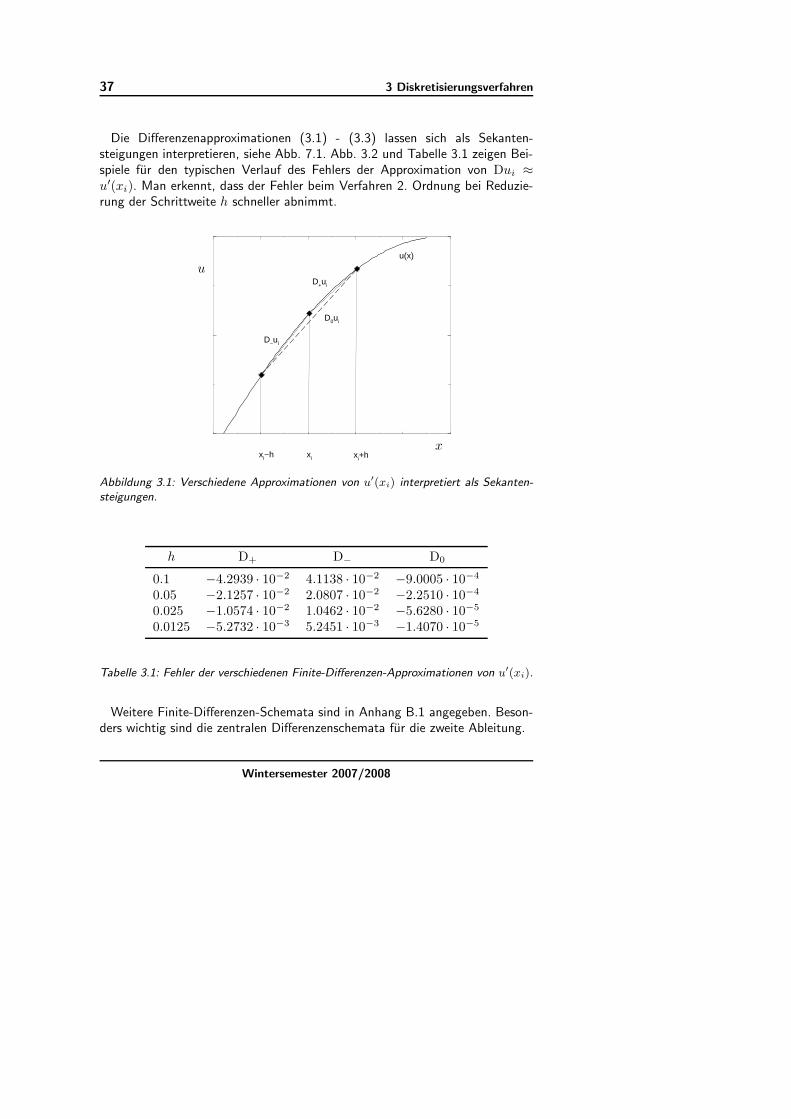
Die Differenzenapproximationen (3.1) - (3.3) lassen sich als Sekanten-steigungen interpretieren, siehe Abb. 7.1. Abb. 3.2 und Tabelle 3.1 zeigen Bei-spiele fur den typischen Verlauf des Fehlers der Approximation von Dui ≈u′(xi). Man erkennt, dass der Fehler beim Verfahren 2. Ordnung bei Reduzie-rung der Schrittweite h schneller abnimmt.
xi−h xi xi+h
u(x)
D0ui
D+ui
D−ui
u
x
Abbildung 3.1: Verschiedene Approximationen von u′(xi) interpretiert als Sekanten-steigungen.
h D+ D− D0
0.1 −4.2939 · 10−2 4.1138 · 10−2 −9.0005 · 10−4
0.05 −2.1257 · 10−2 2.0807 · 10−2 −2.2510 · 10−4
0.025 −1.0574 · 10−2 1.0462 · 10−2 −5.6280 · 10−5
0.0125 −5.2732 · 10−3 5.2451 · 10−3 −1.4070 · 10−5
Tabelle 3.1: Fehler der verschiedenen Finite-Differenzen-Approximationen von u′(xi).
Weitere Finite-Differenzen-Schemata sind in Anhang B.1 angegeben. Beson-ders wichtig sind die zentralen Differenzenschemata fur die zweite Ableitung.
Wintersemester 2007/2008
3.1 Finite-Differenzen-Verfahren 38
10 100
10−4
10−3
10−2
10−1
D+
D−
D0
D3
Du
i−u′ (x
i)
1/h
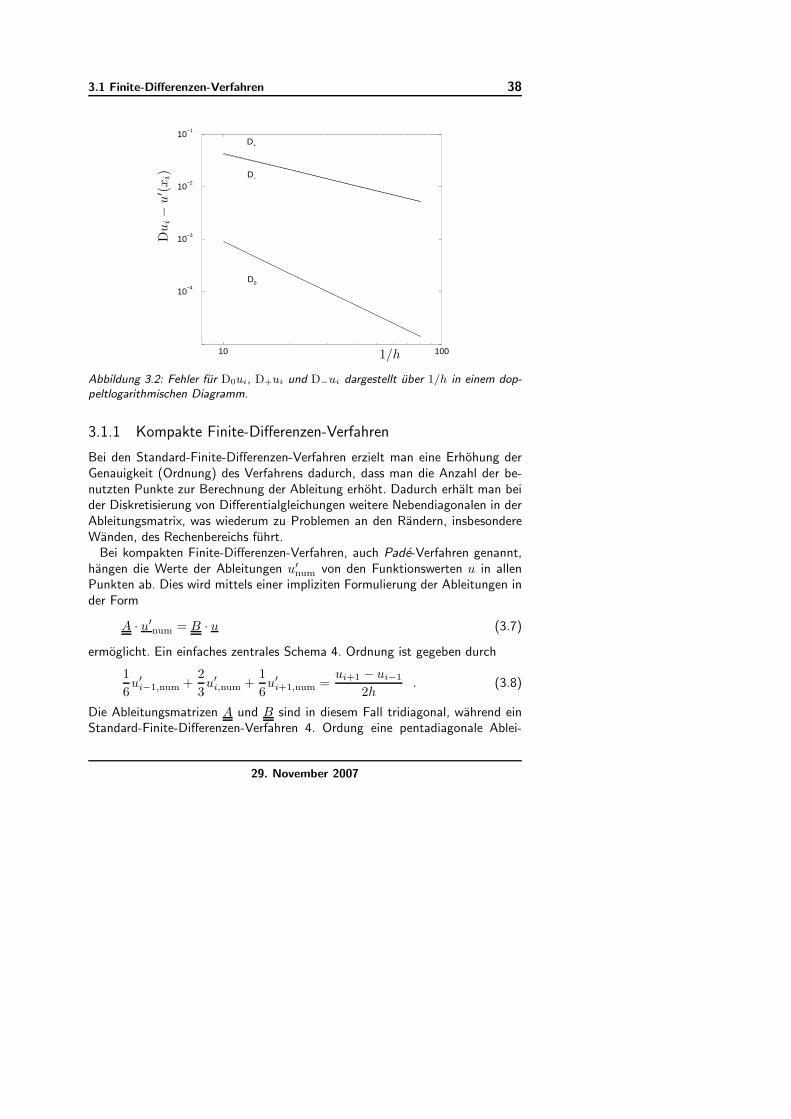
Abbildung 3.2: Fehler fur D0ui, D+ui und D−ui dargestellt uber 1/h in einem dop-peltlogarithmischen Diagramm.
3.1.1 Kompakte Finite-Differenzen-Verfahren
Bei den Standard-Finite-Differenzen-Verfahren erzielt man eine Erhohung derGenauigkeit (Ordnung) des Verfahrens dadurch, dass man die Anzahl der be-nutzten Punkte zur Berechnung der Ableitung erhoht. Dadurch erhalt man beider Diskretisierung von Differentialgleichungen weitere Nebendiagonalen in derAbleitungsmatrix, was wiederum zu Problemen an den Randern, insbesondereWanden, des Rechenbereichs fuhrt.
Bei kompakten Finite-Differenzen-Verfahren, auch Pade-Verfahren genannt,hangen die Werte der Ableitungen u′num von den Funktionswerten u in allenPunkten ab. Dies wird mittels einer impliziten Formulierung der Ableitungen inder Form
A · u′num = B · u (3.7)
ermoglicht. Ein einfaches zentrales Schema 4. Ordnung ist gegeben durch
1
6u′i−1,num +
2
3u′i,num +
1
6u′i+1,num =
ui+1 − ui−1
2h. (3.8)
Die Ableitungsmatrizen A und B sind in diesem Fall tridiagonal, wahrend einStandard-Finite-Differenzen-Verfahren 4. Ordung eine pentadiagonale Ablei-
29. November 2007
39 3 Diskretisierungsverfahren
tungsmatrix aufweist, siehe Gl. (B.11). Tridiagonale lineare Gleichungssyste-me konnen besonders effizient (Aufwand O(N)) mit dem Thomas-Algorithmusgelost werden; fur pentadiagonale Systeme gibt es ebenfalls effiziente Losungs-methoden.
3.1.2 Modifizierte Wellenzahl
Eine einfache und aufschlussreiche Moglichkeit, die Genauigkeit eines Finite-Differenzen-Verfahrens zu analysieren, ist das Prinzip der modifizierten Wel-lenzahl oder Fourier-Analyse. Man betrachtet hierzu eine einzelne Fouriermodeeiner mit 2π periodischen Funktion u(x),
u(x) = ueiξx , (3.9)
mit der Wellenzahl ξ und der (im allgemeinen komplexen) Amplitude u. Dieerste Ableitung nach x ist gegeben durch
u′(x) = iξueiξx . (3.10)
Eine numerische Approximation der Ableitung an xj wird ebenso mittels einerFouriermode dargestellt,
Duj = uDeiξx =: iξueiξx . (3.11)
Unter Verwendung von h = 2π/N (N sei die Anzahl der Gitterpunkte) ergibtsich z.B. fur ein Finite-Differenzen-Verfahren fur Duj die modifizierte Wellen-
zahl ξ dieses Verfahrens durch
ξ(ξ) = −iξDeiξx
eiξx. (3.12)
Fur eine exakte Differentiation ist also ξ(ξ) = ξ.
Beispiel 2. Zentrale Differenzen 2. Ordnung fur die 1. Ableitung:Einsetzen von Gl. (3.9) in das Differenzenschema ergibt
D0uj =u(xj + h) − u(xj − h)
2h=
u
2h
(eiξ(xj+h) − eiξ(xj−h)
)
= uD0eikx = i
u
hsin ξh .
(3.13)
Wintersemester 2007/2008
3.1 Finite-Differenzen-Verfahren 40
Aus Gln. (3.10) und (3.12) erhalt man desweiteren
ξ(ξ)h = sin (ξh)
Oft ersetzt man ξ′ = ξh, ξ′ = ξh und erhalt somit ξ = sin ξ .
Beispiel 3. Analog findet man fur das kompakte zentrale Differenzenschema4. Ordnung mit Gl. (3.9)
u′(xj + h) + u′(xj − h)
6+
2u′(xj)
3=
u(xj + h) − u(xj − h)
2h⇒
iξu
(1
6(eiξh + e−iξh) +
2
3
)=
u
2h
(eiξh − e−iξh
).
Die modifizierte Wellenzahl ist dann
ξ′ =3 sin ξ′
cos ξ′ + 2.
0 0.2π 0.4π 0.6π 0.8π π0
0.2π
0.4π
0.6π
0.8π
π
ξh
ξh
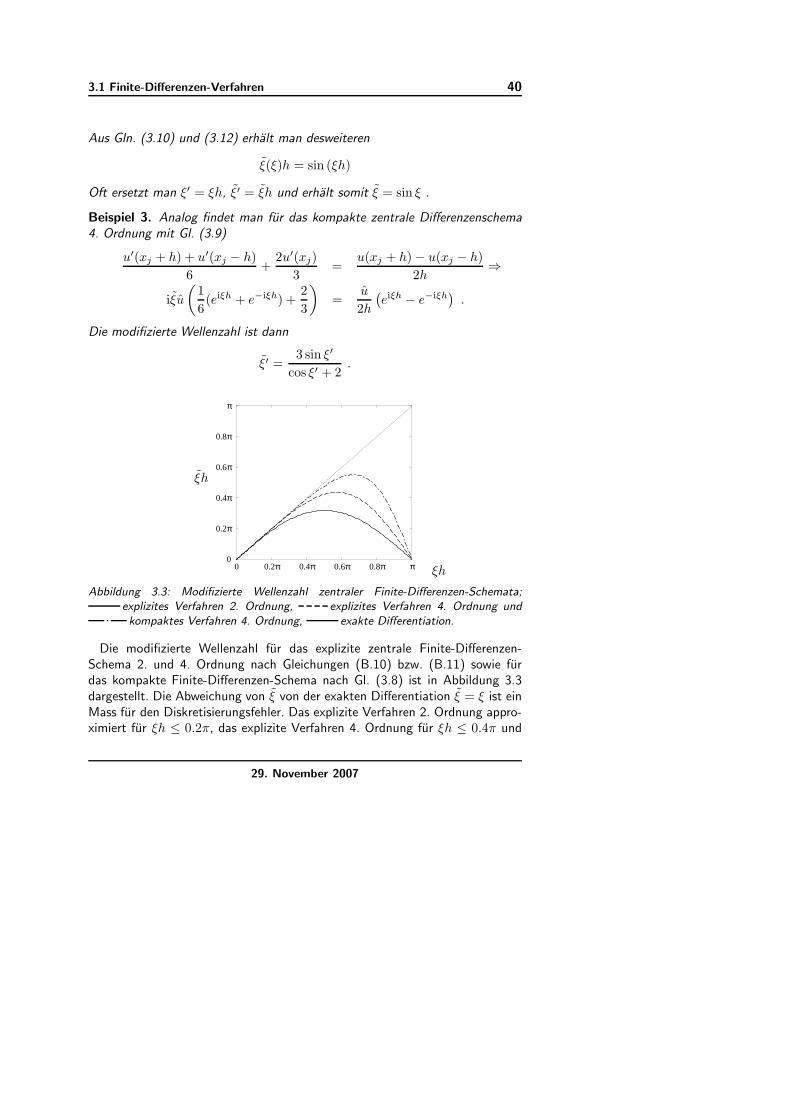
Abbildung 3.3: Modifizierte Wellenzahl zentraler Finite-Differenzen-Schemata;explizites Verfahren 2. Ordnung, explizites Verfahren 4. Ordnung undkompaktes Verfahren 4. Ordnung, exakte Differentiation.
Die modifizierte Wellenzahl fur das explizite zentrale Finite-Differenzen-Schema 2. und 4. Ordnung nach Gleichungen (B.10) bzw. (B.11) sowie furdas kompakte Finite-Differenzen-Schema nach Gl. (3.8) ist in Abbildung 3.3dargestellt. Die Abweichung von ξ von der exakten Differentiation ξ = ξ ist einMass fur den Diskretisierungsfehler. Das explizite Verfahren 2. Ordnung appro-ximiert fur ξh ≤ 0.2π, das explizite Verfahren 4. Ordnung fur ξh ≤ 0.4π und
29. November 2007

41 3 Diskretisierungsverfahren
das kompakte Verfahren fur ξh ≤ 0.6π die Ableitung mit guter Naherung. Furnicht-zentrale Verfahren ist die modifizierte Wellenzahl komplex.
Beispiel 4. Fur die linksseitige Differenzen 1. Ordnung erhalt man
ξ′ = 1 − e−iξ′
= 1 − cos ξ′ + i sin ξ ∈ C| .
Man kann einen Zusammenhang zwischen der Ordnung des Approximations-fehlers und der modifizierten Wellenzahl herleiten. Dazu betrachtet man einenFourieransatz fur u, die exakte Ableitung u′ex und die numerische Approximationder Ableitung u′num
u = ueiξx
u′ex = u′exeiξx = iξueiξx
u′num = u′numeiξx = iξueiξx ,
welcher in die Gleichung fur den Approximationsfehler n-ter Ordnung
u′num − u′ex = O(hn) = Chn dn+1u
dxn+1
eingesetzt wird. Man erhalt daraus
iξuk − iξu = Chn(iξ)n+1u
ξ
ξ= 1 + Chninξn = 1 + O(ξn) ,
d. h. das fuhrende Glied der Taylorentwicklung von ξ/ξ − 1 hat die Ordnungdes Approximationsfehlers.
3.1.3 Finite-Differenzen-Verfahren fur nicht-aquidistante Gitter
Zur numerischen Berechnung einer Stromung kann es von Vorteil sein, nicht-aquidistante Gitter zu verwenden. Dadurch kann das Gitter z. B. in den wand-nahen Gebieten verfeinert und die dort auftretenden hohen Gradienten konnenbesser aufgelost werden, als es mit aquidistantem Gitter bei ahnlicher Anzahlan Gitterpunkten moglich ware. Umgekehrt kann durch eine angepasste Ko-ordinatentransformation (engl. mapping) unnotig hohe Auflosung in Gebieten,wo sie nicht notwendig ist, vermieden werden. Finite-Differenzen-Verfahren sind
Wintersemester 2007/2008
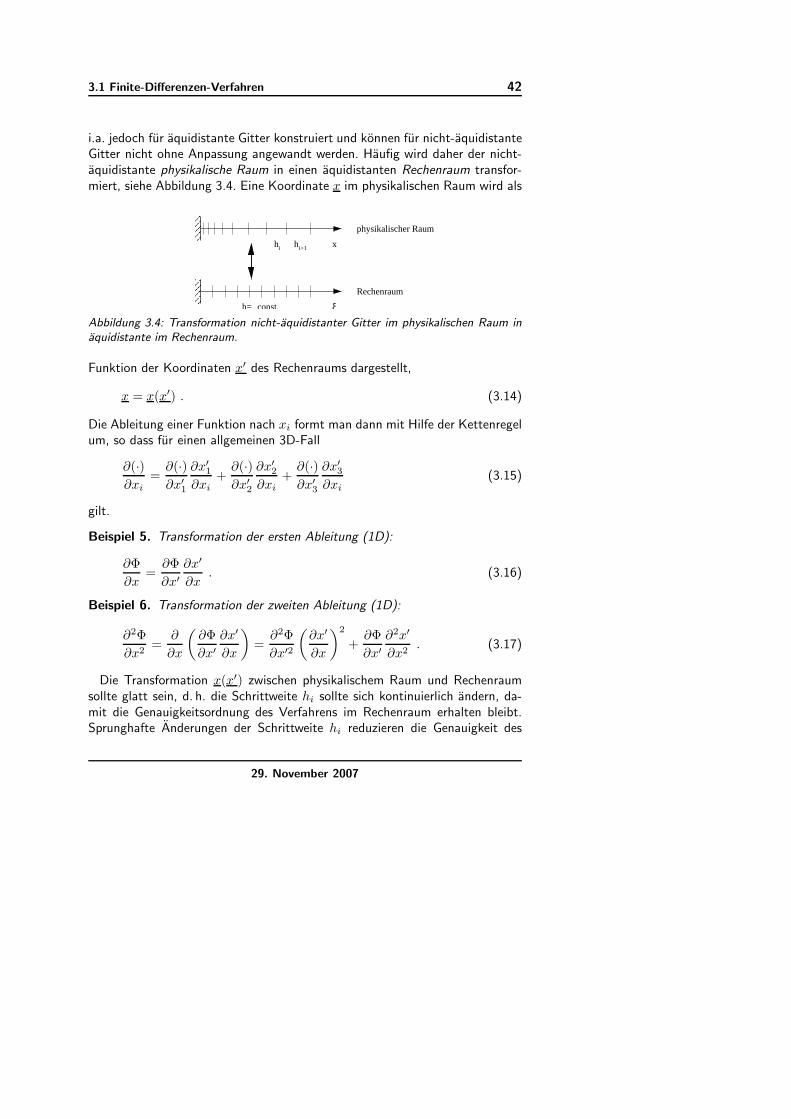
3.1 Finite-Differenzen-Verfahren 42
i.a. jedoch fur aquidistante Gitter konstruiert und konnen fur nicht-aquidistanteGitter nicht ohne Anpassung angewandt werden. Haufig wird daher der nicht-aquidistante physikalische Raum in einen aquidistanten Rechenraum transfor-miert, siehe Abbildung 3.4. Eine Koordinate x im physikalischen Raum wird als
hi+1
xhi
h= const. ξ
physikalischer Raum
Rechenraum
Abbildung 3.4: Transformation nicht-aquidistanter Gitter im physikalischen Raum inaquidistante im Rechenraum.
Funktion der Koordinaten x′ des Rechenraums dargestellt,
x = x(x′) . (3.14)
Die Ableitung einer Funktion nach xi formt man dann mit Hilfe der Kettenregelum, so dass fur einen allgemeinen 3D-Fall
∂(·)∂xi
=∂(·)∂x′1
∂x′1∂xi
+∂(·)∂x′2
∂x′2∂xi
+∂(·)∂x′3
∂x′3∂xi
(3.15)
gilt.
Beispiel 5. Transformation der ersten Ableitung (1D):
∂Φ
∂x=∂Φ
∂x′∂x′
∂x. (3.16)
Beispiel 6. Transformation der zweiten Ableitung (1D):
∂2Φ
∂x2=
∂
∂x
(∂Φ
∂x′∂x′
∂x
)=∂2Φ
∂x′2
(∂x′
∂x
)2
+∂Φ
∂x′∂2x′
∂x2. (3.17)
Die Transformation x(x′) zwischen physikalischem Raum und Rechenraumsollte glatt sein, d. h. die Schrittweite hi sollte sich kontinuierlich andern, da-mit die Genauigkeitsordnung des Verfahrens im Rechenraum erhalten bleibt.Sprunghafte Anderungen der Schrittweite hi reduzieren die Genauigkeit des
29. November 2007

43 3 Diskretisierungsverfahren
Verfahrens bezuglich x. Aus diesem Grund werden haufig trigonometrische oderhyperbolische Funktionen (z. B. sin, cos oder tanh) als Abbildungsfunktionenverwendet, da diese beliebig oft differenzierbar sind. Verwendet man ein nicht-aquidistantes Gitter ohne Transformation, reduziert sich im Allgemeinen dieformale Genauigkeitsordnung des numerischen Verfahrens bezuglich x ebenfalls.
Beispiel 7. Man betrachte das zentrale Differenzenschema 2. Ordnung
Dui =ui+1 − ui−1
xi+1 − xi−1.
Der Approximationsfehler ergibt sich mit hi = xi − xi−1 zu
[Du − u′]xi=
h2i+1 − h2
i
2(hi+1 − hi)
∂2u
∂x2
∣∣∣∣i
+ O(h2i ) .
Sei nun hi+1 = rhi. Es folgt fur den Approximationsfehler
[Du − u′]xi=
(1 − r)
2hi
∂2u
∂x2
∣∣∣∣i
+ O(h2i ) .
Bei einem aquidistanten Gitter ist r = 1 und damit der ApproximationsfehlerO(h2
i ). Fur ein nicht-aquidistantes Gitter mit r 6= 1 ergibt sich jedoch furden Approximationsfehler O(hi). Weiter kann man erkennen, dass fur nahezuaquidistante Gitter (r ≈ 1) der Einfluss des Terms mit O(hi) kleiner ist als furdas links- oder rechtsseitige Differenzenschema 1. Ordnung.
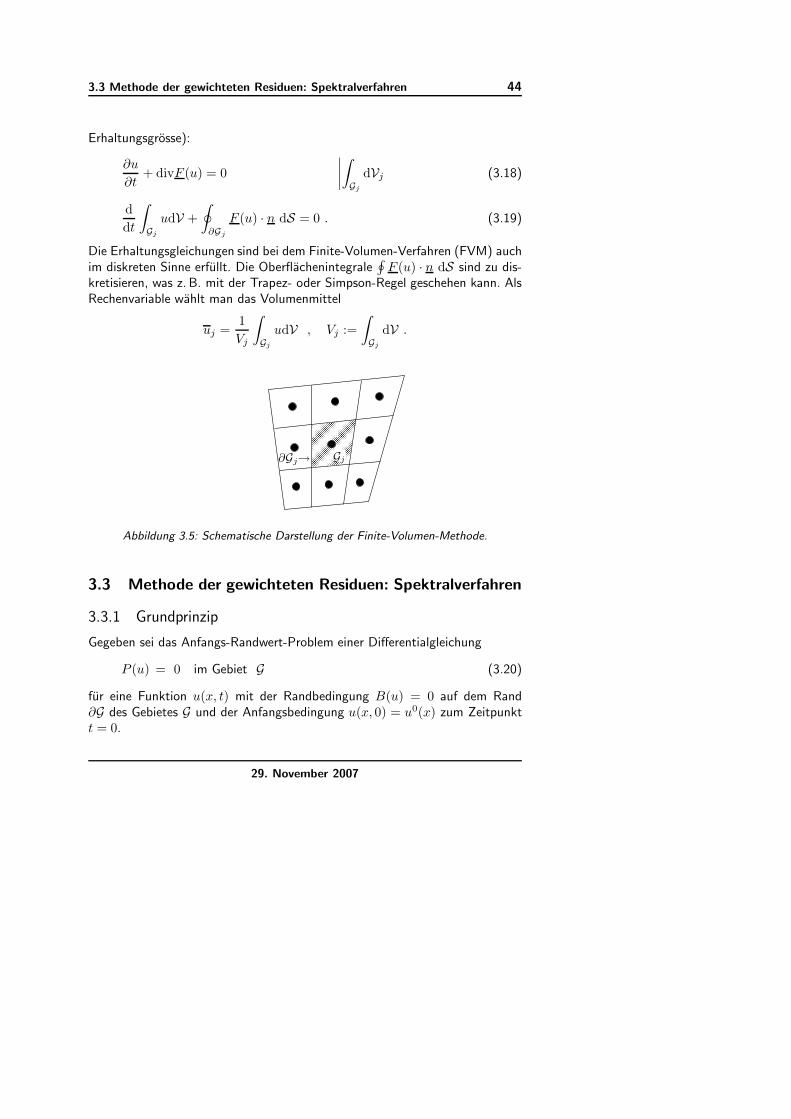
3.2 Finite-Volumen-Methode
Das gesamte Gebiet G, auf dem die Gleichungen gelost werden, wird in dis-junkte Teilbereiche (Kontrollvolumina) Gj unterteilt, siehe Abbildung 3.5. Dieintegrale Form der Erhaltungsgleichung wird nun fur die einzelnen Kontroll-volumina (KV) formuliert [VM95]. Die KV konnen sehr flexibel gestaltet undangeordnet werden, z. B. quaderformig oder als Tetraeder, strukturierte oderunstrukturierte Gitter, adaptive Gitter, etc. Die integrale Form der Erhaltungs-gleichung entspricht einer Integration der Grundgleichungen in Erhaltungsform(konservative Form) uber die KV, wobei die Volumenintegrale in Oberflachen-integrale nach dem Gauss’schen Satz umgeschrieben werden (u ist eine skalare
Wintersemester 2007/2008
3.3 Methode der gewichteten Residuen: Spektralverfahren 44
Erhaltungsgrosse):
∂u
∂t+ divF (u) = 0
∣∣∣∣∫
Gj
dVj (3.18)
d
dt
∫
Gj
udV +
∮
∂Gj
F (u) · n dS = 0 . (3.19)
Die Erhaltungsgleichungen sind bei dem Finite-Volumen-Verfahren (FVM) auchim diskreten Sinne erfullt. Die Oberflachenintegrale
∮F (u) · n dS sind zu dis-
kretisieren, was z. B. mit der Trapez- oder Simpson-Regel geschehen kann. AlsRechenvariable wahlt man das Volumenmittel
uj =1
Vj
∫
Gj
udV , Vj :=
∫
Gj
dV .
Gj∂Gj→
Abbildung 3.5: Schematische Darstellung der Finite-Volumen-Methode.
3.3 Methode der gewichteten Residuen: Spektralverfahren
3.3.1 Grundprinzip
Gegeben sei das Anfangs-Randwert-Problem einer Differentialgleichung
P (u) = 0 im Gebiet G (3.20)
fur eine Funktion u(x, t) mit der Randbedingung B(u) = 0 auf dem Rand∂G des Gebietes G und der Anfangsbedingung u(x, 0) = u0(x) zum Zeitpunktt = 0.
29. November 2007
45 3 Diskretisierungsverfahren
Bei der Methode der gewichteten Residuen (MGR) wird eine NaherungslosunguN(x, t) der Differentialgleichung als kontinuierliche Funktion angesetzt undwie folgt als endliche Reihe geschrieben
uN (x, t) = uR(x, t) +
N∑
k=0
ak(t) · φk(x) , (3.21)
mituN (x, t) die Naherungslosung;uR(x, t) eine (i. a. leicht zu findende) Funktion,
welche die Randbedingungen B(uR) = 0 erfullt;φk(x) gegebene Ansatzfunktionen (
”trial functions“),
welche homogene Randbedingungen erfullen;ak(t) die gesuchten Entwicklungskoeffizienten.
Die Ableitungen der Funktion uN kann man direkt gewinnen aus (hier furuR = 0)
∂p
∂xpuN =
N∑
k=0
ak(t) · dp
dxpφk(x) .
Entwickelt man die Ableitungen wieder nach den Ansatzfunktionen, so benutztman die Schreibweise
∂p
∂xpuN =
N ′∑
k=0
a(p)k (t) · φk(x)
(N ′ kann von N verschieden sein).
Definition 4. Residuum.Der Fehler, der sich beim Einsetzen des Ansatzes (3.21) in die Differentialglei-chung (3.20) ergibt, wird als Residuum R(x, t) bezeichnet, d. h.
R(x, t) := P (uN (x, t)) . (3.22)
Zur Bestimmung der noch unbekannten Koeffizienten ak wird bei der MGRverlangt, dass das mit N + 1 linear unabhangigen Gewichtsfunktionen (
”test
Wintersemester 2007/2008

3.3 Methode der gewichteten Residuen: Spektralverfahren 46
functions“) wj(x) gewichtete Residuum bei Integration uber G verschwindet,d. h. dass gilt
∫
G
wj(x) ·R(x, t) dx = 0 , j = 0, ..., N . (3.23)
oder kurzer geschrieben unter Verwendung des Skalarproduktes fur reelleFunktionen f und g (f, g) =
∫G f · g dx
(R,wj) = 0 , j = 0, ..., N
Es wird damit gefordert, dass das Residuum zu allen Testfunktionen orthogonalist.
3.3.2 Wahl der Gewichtsfunktionen
Galerkin-Verfahren:
Beim Galerkin-Verfahren werden in Gleichung (3.23) als Gewichtsfunktionen wj
die Ansatzfunktionen φj gewahlt:
wj = φj , j = 0, ..., N .
Kollokations-Verfahren:
Hier werden in G N + 1”Kollokationspunkte“ x0, ..., xN gewahlt und es wird
verlangt, dass das Residuum an den Kollokationspunkten verschwindet:
R(xj) = 0 , j = 0, ..., N .
Die zugehorigen Gewichtsfunktionen in (3.23) haben hier also die Form
wj = δ(x − xj) , j = 0, ..., N ,
wobei δ die Diracsche Deltafunktion bezeichnet.
29. November 2007

47 3 Diskretisierungsverfahren
Methode der kleinsten Fehlerquadrate:
Es werden diejenigen Koeffizienten bestimmt, fur die das Quadrat des Residu-ums integriert uber G minimal wird:
∫
G
R2dx!= min
aj, j = 0, ..., N .
Die Gewichtsfunktionen in (3.23) lassen sich dann in der Form
wj =∂R
∂aj, j = 0, ..., N
schreiben.
Teilbereichsmethode:
Fur das Gebiet G wird eine Zerlegung: G = G0∪G1∪G2∪ ...∪GN in (nicht not-wendig disjunkte) Teilgebiete Gj vorgenommen. Die Gewichtsfunktionen wj(x)in Gleichung (3.23) sind definiert als
wj(x) =
1 fur x ∈ Gj
0 sonstfur j = 0, ..., N .
Das Residuum soll also in jedem der Teilgebiete verschwinden,
∫
Gj
R(x)dx = 0 , j = 0, ..., N .
Beispiel 8. Linearer FallLineare Differentialgleichungen lassen sich auf die Form
P (u) = Lu− r
bringen. Dabei stellt L einen linearen Operator und r, die Inhomogenitat, einenicht von u abhangige Funktion dar. Setzt man das zugehorige Residuum
R(x) = LuN − r
Wintersemester 2007/2008

3.3 Methode der gewichteten Residuen: Spektralverfahren 48
in Gleichung (3.23) ein und entwickelt u gemass Gleichung (3.21), so erhalt manfur den Vektor der Koeffizienten a = (a0, ..., aN)T das lineare Gleichungssystem
N∑
k=0
ak
∫
G
wj · Lφk(x) dx =
∫
G
wj · (r − LuR) dx , j = 0, ..., N (3.24)
oder in abgekurzter Schreibweise: Aa = s mit
Ajk =
∫
G
wj · Lφk(x) dx ; sj =
∫
G
wj · (r − LuR) dx .
A und s nehmen fur die verschiedenen Verfahren die folgenden Formen an:
Galerkin-Verfahren: Ajk =∫φj Lφk dx sj =
∫φj(r − LuR) dx
Kollokations-Verfahren: Ajk = Lφk(xj) sj = r(xj) − LuR(xj)
Kleinste Fehlerquadrate: Ajk =∫
Lφj Lφk dx sj =∫Lφj · (r − LuR) dx
Teilbereichsmethode: Ajk =∫Gj
Lφk dx sj =∫Gj
(r − LuR) dx .
3.3.3 Wahl der Ansatzfunktionen
Bei Spektralmethoden wahlt man als Ansatzfunktionen typischerweise glatte(meist beliebig oft differenzierbare), globale, d. h. in ganz G definierte Funktio-nen [CHQZ88].
3.3.3.1 Beispiele fur haufig verwendete Reihenansatze
Fourier-ReihenZur Approximation von periodischen Funktionen u(x) = u(x + L) eignen sichFourier-Reihen besonders. Die Entwicklung erfolgt hierbei nach trigonometri-schen Funktionen. Mit der Definition der Grundwellenzahl α := 2π/L erhaltman
uN (x) =∑
|k|≤K
ckeikαx , wobei ck ∈ C. (3.25)
In der Summe treten 2K+1 Summanden auf. Eine alternative Bezeichnung derSummengrenzen ist |k| ≤ N/2 mit N = 2K. Fur reelles uN gilt c−k = c∗k (z∗
29. November 2007

49 3 Diskretisierungsverfahren
ist die zu z konjugierte komplexe Zahl) und (3.25) ist aquivalent zur reellenSchreibweise
uN (x) =a0
2+
K∑
k=1
(ak cos kαx + bk sin kαx)
mit ak = (c+k + c−k) , bk = i (c+k − c−k) .
Chebyshev-PolynomeDie Chebyshev-Polynome sind fur |x| ≤ 1 definiert durch
Tk(x) = cos(k arccosx) , k = 0, 1, 2, ...
Die ersten vier Polynome sind:
T0(x) = 1 T1(x) = x
T2(x) = 2x2 − 1 T3(x) = 4x3 − 3x .
Es gilt die Rekursionsformel:
Tk+1(x) + Tk−1(x) = 2 xTk(x) , k ≥ 1 . (3.26)
-1 -0.5 0.5 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
Abbildung 3.6: Die Chebyshev-Polynome T1 bis T6.
Einige wichtige Eigenschaften von Tk sind:
Wintersemester 2007/2008

3.3 Methode der gewichteten Residuen: Spektralverfahren 50
• Die Polynome sind – in Abhangigkeit von k – gerade oder ungerade Funk-tionen, d. h.
Tk(−x) = (−1)k Tk(x) .
• Insbesondere gilt fur die Randpunkte −1,+1: Tk(±1) = (±1)k .
• Die Polynome sind bezuglich des Skalarprodukts
(f, g) :=
1∫
−1
f(x)g(x)√1 − x2
dx
im Intervall [−1,+1] orthogonal. Es gilt
(Tk, Tl) =
1∫
−1
Tk(x)Tl(x)√1 − x2
dx =π
2ck δk,l ; k, l = 0, 1, 2, ...
mit c0 ≡ 2, ck ≡ 1 fur k ≥ 1 , wobei δk,l das Kroneckersymbol bezeichnet.
Fur die Auswertung einer endlichen Chebyshev-Reihe
uN (x) =
N∑
k=0
ak Tk(x) (3.27)
bei gegebenen ak gilt der (numerisch stabile) Algorithmus:
BN+1 := 0 , BN := aN
Bk := ak + 2xBk+1 −Bk+2 , k = N−1, ..., 1
uN(x) = a0 −B2 +B1 x .
Die sogenannten Gauss-Lobatto-Stutzstellen sind gegeben durch
xj = cosπj
N. (3.28)
Bezuglich dieser Stutzstellen kann die diskrete Ableitungsmatrix in u′N = D uN ,also u′N (xi) =
∑j DijuN (xj), angegeben werden als
Dij =
ci
cj
(−1)i+j
xi−xj, i 6= j
− xi
2(1−x2i), 1 ≤ i = j ≤ N − 1
2N2+16 , i = j = 0
− 2N2+16 , i = j = N
, (3.29)
29. November 2007
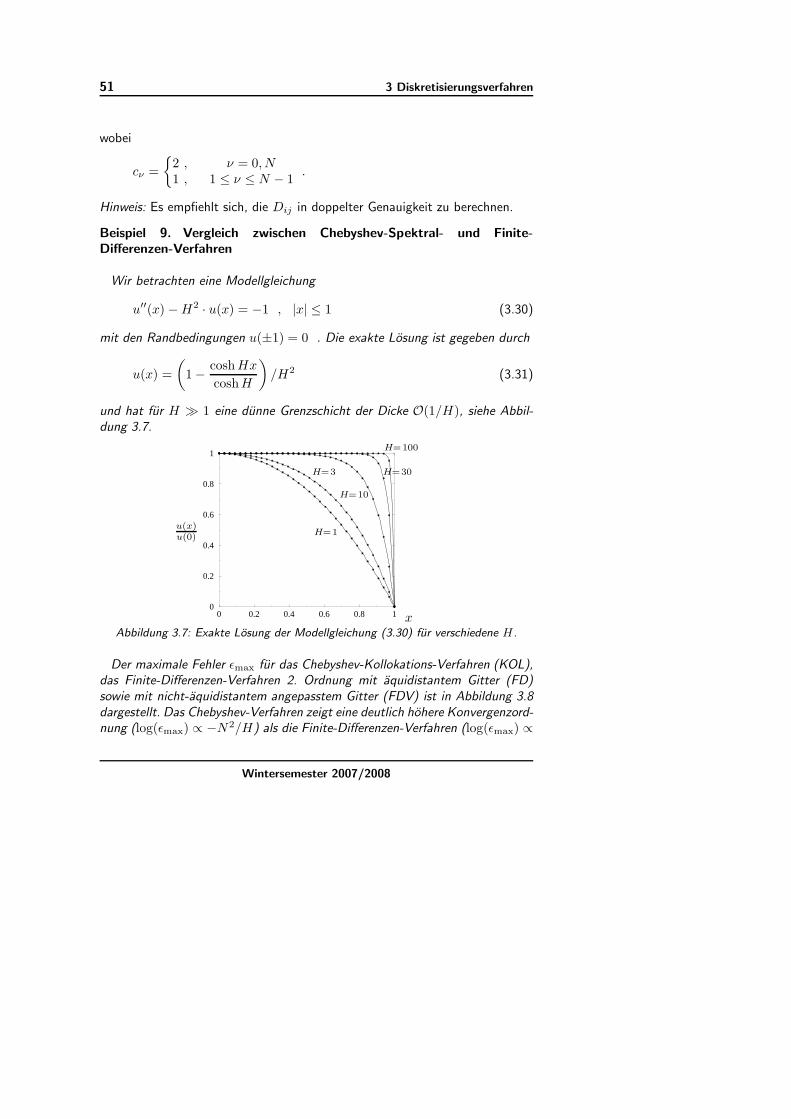
51 3 Diskretisierungsverfahren
wobei
cν =
2 , ν = 0, N1 , 1 ≤ ν ≤ N − 1
.
Hinweis: Es empfiehlt sich, die Dij in doppelter Genauigkeit zu berechnen.
Beispiel 9. Vergleich zwischen Chebyshev-Spektral- und Finite-Differenzen-Verfahren
Wir betrachten eine Modellgleichung
u′′(x) −H2 · u(x) = −1 , |x| ≤ 1 (3.30)
mit den Randbedingungen u(±1) = 0 . Die exakte Losung ist gegeben durch
u(x) =
(1 − coshHx
coshH
)/H2 (3.31)
und hat fur H ≫ 1 eine dunne Grenzschicht der Dicke O(1/H), siehe Abbil-dung 3.7.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
u(x)u(0)
x
H=1
H=3
H=10
H=30
H=100
Abbildung 3.7: Exakte Losung der Modellgleichung (3.30) fur verschiedene H .
Der maximale Fehler ǫmax fur das Chebyshev-Kollokations-Verfahren (KOL),das Finite-Differenzen-Verfahren 2. Ordnung mit aquidistantem Gitter (FD)sowie mit nicht-aquidistantem angepasstem Gitter (FDV) ist in Abbildung 3.8dargestellt. Das Chebyshev-Verfahren zeigt eine deutlich hohere Konvergenzord-nung (log(ǫmax) ∝ −N2/H) als die Finite-Differenzen-Verfahren (log(ǫmax) ∝
Wintersemester 2007/2008

3.3 Methode der gewichteten Residuen: Spektralverfahren 52
− logN2). Man spricht bei dem Chebyshev-Verfahren von exponentieller oderspektraler Konvergenz. Mit aquidistantem Gitter ist der Fehler des Finite-Differenzen-Verfahrens in diesem Fall stets grosser als mit dem Chebychev-Verfahren. Auf einem angepassten, nicht-aquidistanten Gitter kann der Fehlerdes FDV allerdings im Vergleich zu FD deutlich reduziert werden und ist fureine sehr kleine Punkteanzahl gar geringer als bei dem Chebychev-Verfahren.
10-5
KOL
10-4
10-3
10-2
10-1
FD
single precision
double precision
FDV
1
M 2∼
Chebyshev-SM
102
103
104
10
ǫmax
NAbbildung 3.8: Qualitatives Verhalten des maximalen Fehles ǫmax fur ein generischesModellproblem; KOL: Chebyshev-Kollokation, FD: Finite Differenzen mit aquidistan-tem Gitter, FDV: Finite Differenzen mit nicht-aquidistantem, angepasstem Gitter.
Legendre-PolynomeDie Legendre-Polynome sind fur |x| ≤ 1 definiert durch die Rekursionsformel:
kLk(x) = (2k − 1)xLk−1(x) − (k − 1)Lk−2(x) , k ≥ 2 .
Die ersten drei Polynome sind gegeben durch
L0(x) = 1
L1(x) = x
L2(x) =1
2(3x2 − 1) . (3.32)
29. November 2007

53 3 Diskretisierungsverfahren
-1 -0.5 0.5 1
-1
-0.75
-0.5
-0.25
0.25
0.5
0.75
1
Abbildung 3.9: Die Legendre-Polynome L1 bis L6.
Einige wichtige Eigenschaften von Lk sind:
• Die Polynome sind – in Abhangigkeit von k – gerade oder ungerade Funk-tionen, d. h.
Lk(−x) = (−1)k Lk(x) .
• Insbesondere gilt fur die Randpunkte −1,+1: Lk(±1) = (±1)k .
• Die Polynome sind bezuglich des Skalarprodukts
(f, g) :=
1∫
−1
f(x)g(x) dx
im Intervall [−1,+1] orthogonal. Es gilt
(Lk, Ll) =
1∫
−1
Lk(x)Ll(x) dx =2
2k + 1δk,l , k, l = 0, 1, 2, ...
wobei δk,l das Kroneckersymbol bezeichnet.
Wintersemester 2007/2008

3.3 Methode der gewichteten Residuen: Spektralverfahren 54
Fur die Auswertung einer endlichen Legendre-Reihe
uN (x, t) =
N∑
k=0
ak Lk(x) (3.33)
bei gegebenen ak gilt nach dem Clenshaw-Algorithmus :
BN+1 := 0 , BN := aN
Bk := ak + 2k+1k+1 xBk+1 − (k + 1)Bk+2 , k = N−1, ..., 1
uN(x) = a0 −B2 + xB1 .
Die sogenannten Gauss-Lobatto-Stutzstellen sind gegeben durch
x0 = −1 , xN = 1 , L′N (xj) = 0 , j = 1, . . . , N − 1 . (3.34)
Bezuglich dieser Stutzstellen kann die diskrete Ableitungsmatrix in u′N = D uN
angegeben werden als
Dij =
1xi−xj
LN (xi)LN (xj)
, i 6= j
− 14 (N + 1)N , i = j = 0
+ 14 (N + 1)N , i = j = N
0 , sonst .
(3.35)
29. November 2007

55 3 Diskretisierungsverfahren
3.3.4 Pseudospektrale Auswertung der nichtlinearen Terme
Die spektrale Auswertung von nichtlinearen Termen erfordert eine grosse Anzahlvon Operationen. Betrachten wir z. B. die Burgers-Gleichung als Beispiel fur einenichtlineare Differentialgleichung, welche gegeben ist durch
∂u
∂t+
1
2
∂(u · u)∂x
=∂u
∂t+ u
∂u
∂x= 0 , 0 ≤ x ≤ 2π . (3.36)
Die Lange des periodischen Rechengebiets ist L = 2π und somit die Grundwel-lenzahl α = 1.
Die Diskretisierung der Burgers-Gleichung (3.36) soll mit Hilfe eines Fourier-Galerkin-Spektralverfahrens erfolgen. Die Ansatzfunktionen sind demnach ge-geben durch φk(x) = eikx und als Testfunktionen wird wl(x) = φl(x) = eilx
verwendet. Der Reihenansatz fur u(x, t) ist
u(x, t) =
K∑
k=−K
uk(t)φk(x) =
K∑
k=−K
uk(t)eikx . (3.37)
Setzt man den Reihenansatz (3.37) in die Burgers-Gleichung (3.36) ein, ergibtsich
K∑
k=−K
duk
dtφk(x) +
K∑
k=−K
ukφk(x)
K∑
m=−K
umdφm(x)
dx= 0 . (3.38)
Multiplikation mit den Testfunktionen und Integration uber das Gebiet0 ≤ x ≤ 2π unter Verwendung der Orthogonalitatsbedingung
∫ 2π
0
φk(x)φ−l(x)dx = 2πδkl
resultiert in der Bestimmungsgleichung fur die Koeffizienten ul,
dul
dt+
K∑
k=−Km+k=l|m|≤K
i m ukum = 0 . (3.39)
Aufgrund der Summe in Gl. (3.39), die fur alle |l| ≤ K ausgewertet wer-den muss, ist die Anzahl der Operationen O(K2), welches fur grosse K derzeitaufwendigste Teil der numerischen Losung darstellt.
Wintersemester 2007/2008
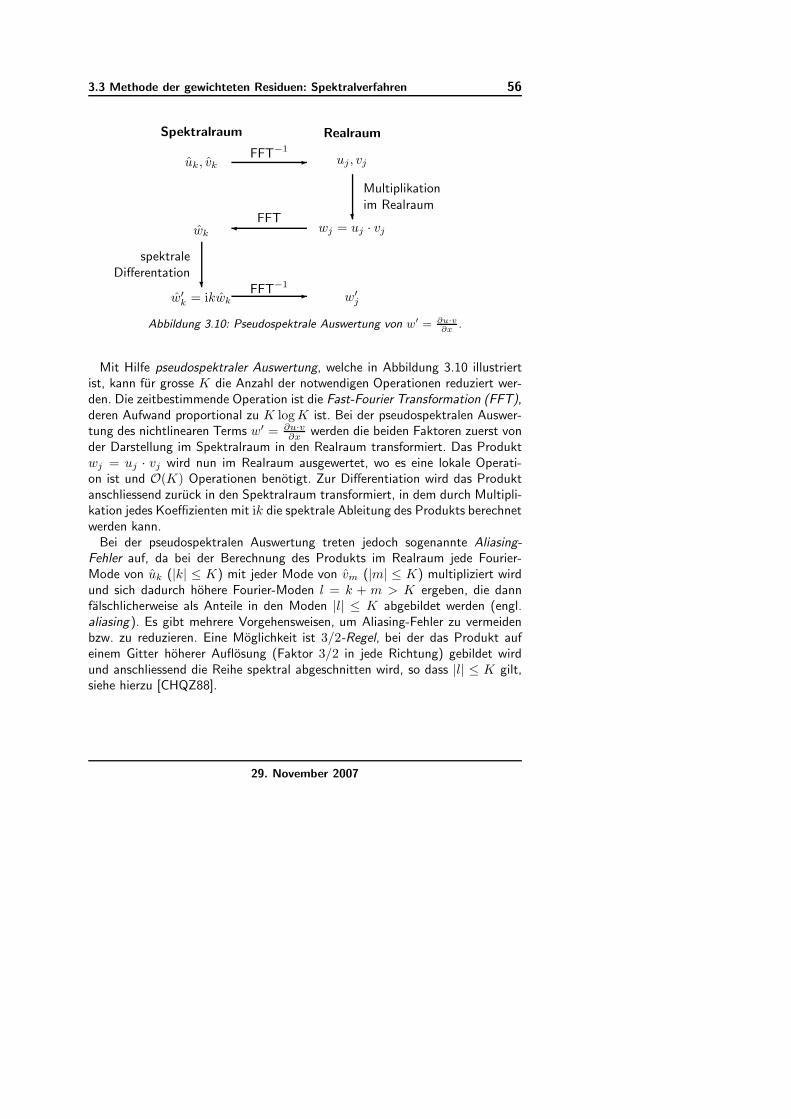
3.3 Methode der gewichteten Residuen: Spektralverfahren 56
Spektralraum Realraum
uk, vk uj, vj
wj = uj · vjwk
w′k = ikwk w′
j
spektraleDifferentation
Multiplikationim Realraum
?
?
-
-
FFT−1
FFT
FFT−1
Abbildung 3.10: Pseudospektrale Auswertung von w′ = ∂u·v∂x
.
Mit Hilfe pseudospektraler Auswertung, welche in Abbildung 3.10 illustriertist, kann fur grosse K die Anzahl der notwendigen Operationen reduziert wer-den. Die zeitbestimmende Operation ist die Fast-Fourier Transformation (FFT),deren Aufwand proportional zu K logK ist. Bei der pseudospektralen Auswer-tung des nichtlinearen Terms w′ = ∂u·v
∂x werden die beiden Faktoren zuerst vonder Darstellung im Spektralraum in den Realraum transformiert. Das Produktwj = uj · vj wird nun im Realraum ausgewertet, wo es eine lokale Operati-on ist und O(K) Operationen benotigt. Zur Differentiation wird das Produktanschliessend zuruck in den Spektralraum transformiert, in dem durch Multipli-kation jedes Koeffizienten mit ik die spektrale Ableitung des Produkts berechnetwerden kann.
Bei der pseudospektralen Auswertung treten jedoch sogenannte Aliasing-Fehler auf, da bei der Berechnung des Produkts im Realraum jede Fourier-Mode von uk (|k| ≤ K) mit jeder Mode von vm (|m| ≤ K) multipliziert wirdund sich dadurch hohere Fourier-Moden l = k + m > K ergeben, die dannfalschlicherweise als Anteile in den Moden |l| ≤ K abgebildet werden (engl.aliasing). Es gibt mehrere Vorgehensweisen, um Aliasing-Fehler zu vermeidenbzw. zu reduzieren. Eine Moglichkeit ist 3/2-Regel, bei der das Produkt aufeinem Gitter hoherer Auflosung (Faktor 3/2 in jede Richtung) gebildet wirdund anschliessend die Reihe spektral abgeschnitten wird, so dass |l| ≤ K gilt,siehe hierzu [CHQZ88].
29. November 2007

57 3 Diskretisierungsverfahren
3.4 Finite-Elemente-Methode
Im Gegensatz zu der Finite-Differenzen- und Finite-Volumen-Methode, bei de-nen die Losung auf einem Gitter approximiert wird, wird bei der Finite-Elemente-Methode (FEM) – ahnlich wie bei den Spektralmethoden – die Losung als Line-arkombination von Ansatzfunktionen φj(x) (hier auch shape functions genannt)dargestellt,
uN (x, t) = uR(x, t) +
N∑
j=0
aj(t) · φj(x) . (3.40)
Anders als bei den Spektralverfahren sind bei FEM allerdings die Ansatzfunktio-nen nur auf Teilgebieten Ge des Rechengebiets G und nicht auf dem gesamtenGebiet G als von null verschieden definiert. Formal sind sie in G\Ge als nulldefiniert, also fur alle x ∈ G, so dass man Integrale
∫G . . .dx uber das gan-
ze Gebiet G ausfuhren kann. Die Teilbereiche Ge werden so gewahlt, dass dieVereinigung aller Teilbereiche Ge und deren Rander ∂Ge identisch ist mit demgesamten Rechengebiet G und dessen Rand ∂G.
Bei der FEM werden als Ansatzfunktionen Polynome niedrigen Grades pgewahlt, die auf jedem der Elemente lokal definiert sind. Ein Standardbeispielsind eindimensionale lineare Ansatzfunktionen, lineare Lagrange-Elemente (sie-he Abbildung 3.11)
φj(x) =
x−xj−1
xj−xj−1xj−1 ≤ x ≤ xj
xj+1−xxj+1−xj
xj ≤ x ≤ xj+1
0 sonst .
(3.41)
Die Punkte xj und xj+1 bezeichnet man als Knoten des Elementes Ge. Imallgemeinen benotigt man fur die Bestimmung eines Polynoms p-ter Ordnungp+ 1 Knoten.
Den Abbruchfehler E = uN (x) − u(x) fur die Darstellung einer Funktionu(x) erhalt man durch Betrachten der Taylorentwicklung der Funktion u(x) ineinem Punkt xi,
u(xi + h) = u(xi) + h∂u
∂x
∣∣∣∣xi
+1
2h2 ∂
2u
∂x2
∣∣∣∣xi
+ · · · . (3.42)
Wintersemester 2007/2008

3.4 Finite-Elemente-Methode 58
1
xi xi+1GeGe−1 Ge+1
φj
Abbildung 3.11: Eindimensionale lineare Ansatzfunktionen.
Polynomglieder in Gleichung (3.42), deren Grad kleiner oder gleich dem Grad pder Ansatzfunktionen ist, werden exakt approximiert, so dass sich ein Abbruch-fehler
E = O(hp+1)
ergibt; hierbei sei h ein Mass fur die Grosse des Elementes. Der Abbruchfehler
fur Ableitungen ∂d
∂xd der Funktion u(x) ist entsprechend E = O(hp+1−d).Zur Bestimmung der unbekannten Koeffizienten aj verwendet man bei FEM
oft eine Galerkin-Formulierung, d. h. die Testfunktionen sind identisch mit denAnsatzfunktionen, wj(x) = φj(x), siehe Kapitel 3.3.2. Fur eine Differentialglei-chung
P (u) = 0 im Teilgebiet Ge , (3.43)
ergeben sich mit Gl. (3.23) N + 1 Gleichungen fur die N + 1 Unbekannten aj ,
∫
Ge
φk(x) · P (uN (x, t)) dx = 0 , k = 0, ..., N . (3.44)
Betrachten wir nun die Konvergenz von uN gegen die exakte Losung u derDifferentialgleichung (3.43), so muss der Abbruchfehler fur u und auch fur allein der diskretisierten Differentialgleichung (3.44) vorkommenden Ableitungenmindestens von der Ordnung O(h) sein. Sei die hochste in der diskretisierten
Differentialgleichung auftretende Ableitung ∂d
∂xd , so muss
p+ 1 − d ≥ 1 , bzw. p ≥ d (3.45)
sein.Mittels partieller Integration der Gleichung (3.44) kann die hochste Ableitung
und damit der Polynom-Grad der Ansatzfunktionen reduziert werden.
29. November 2007
59 3 Diskretisierungsverfahren
Beispiel 10. Finite-Elemente-Diskretisierung einer Differentialgleichung2. Ordnung
Gegeben sei das Anfangs-Randwert-Problem (ARWP) fur u(x, t),
∂u
∂t− ∂2u
∂x2= 0 , 0 ≤ x ≤ 1 (3.46)
mit den Randbedingungen
u(0, t) = 1 ,∂u
∂x
∣∣∣∣x=1
= 0 (3.47)
und entsprechenden Anfangsbedingungen u(x, 0) = u0(x). Das Problem wirdunter Verwendung der linearen Lagrange-Elemente gelost, siehe Gl. (3.41) undBild 3.11. Wie spater gezeigt wird, konnen die Randbedingungen in diesem Fallemit
∑Nj=0 aj(t) · φj dargestellt werden und es kann uR = 0 gesetzt werden,
also
uN (x, t) =
N∑
j=0
aj(t) · φj . (3.48)
Einsetzen des Ansatzes in die Differentialgleichung ergibt fur das Residuum
R(x, t) =
N∑
j=0
(daj
dtφj − aj(t)
d2φj
dx2
). (3.49)
Multiplikation mit den Gewichtsfunktionen und Integration uber das Gebietresultiert in
1∫
0
φk(x) ·R(x, t)dx =
N∑
j=0
daj
dt
1∫
0
φj(x)φk(x)dx −
N∑
j=0
aj(t)
1∫
0
φk(x)d2φj
dx2dx
= 0 , k = 0, ..., N ,
(3.50)
Wintersemester 2007/2008
3.4 Finite-Elemente-Methode 60
wobei der Term mit der zweiten Ableitung der Ansatzfunktion mittels partiellerIntegration umgeformt werden kann,
1∫
0
φk(x)d2φj
dx2dx =
[φk(x)
dφj
dx
]1
0
−1∫
0
dφk
dx
dφj
dxdx . (3.51)
Die Neumann-Randbedingung lasst sich leicht durch Umformen des Randtermsin Gl. (3.51) implementieren,
[aj
dφj
dxφk(x)
]1
0
=[a′jφk(x)φj
]10. (3.52)
a′j sind die Entwicklungskoeffizienten der Ableitung ∂u∂x der Funktion u(x, t).
Die Dirichlet-Randbedingung wird durch Ersetzen der Entwicklungsgleichungfur den Knoten bei x = 0 aufgepragt.
Die hochste auftretende Ableitung der modifizierten Gleichung ist 1. Ordnung(d = 1) anstatt 2. Ordnung bei der ursprunglichen Differentialgleichung (3.46).Fur die Konvergenz des Verfahrens genugen demnach mit Gl. (3.45) die gewahl-ten Ansatzfunktionen erster Ordnung.
Durch Auswerten der Integrale in Gl. (3.50) und Zeitdiskretisierung erhalt manein Gleichungssystem fur die Koeffizienten aj , welches mit ublichen Losungs-verfahren gelost werden kann.
Wie zuvor gezeigt, ist der Abbruchfehler einer Differentialgleichung d-ten Gra-des von der Ordnung O(hp+1−d). Es gibt daher prinzipiell zwei Moglichkei-ten, die nachfolgend erlautert werden, um die Genauigkeit des Verfahrens zuerhohen:
•”h-Methode“
Bei der h-Methode erhoht man die Anzahl der Elemente Ge im GebietG. Als Folge der Verfeinerung verkleinert sich die Elementgrosse h unddadurch der Abbruchfehler.
•”p-Methode“
Anstelle einer Verfeinerung des Gebietes kann die Genauigkeit auch durchVerwendung von Ansatzfunktion hoherer Ordnung p verbessert werden.
Als Ansatzfunktionen hoherer Ordnung konnen Lagrange-Polynomep-ten Grades verwendet werden. Die Lagrange-Polynome φk(x) haben die
29. November 2007
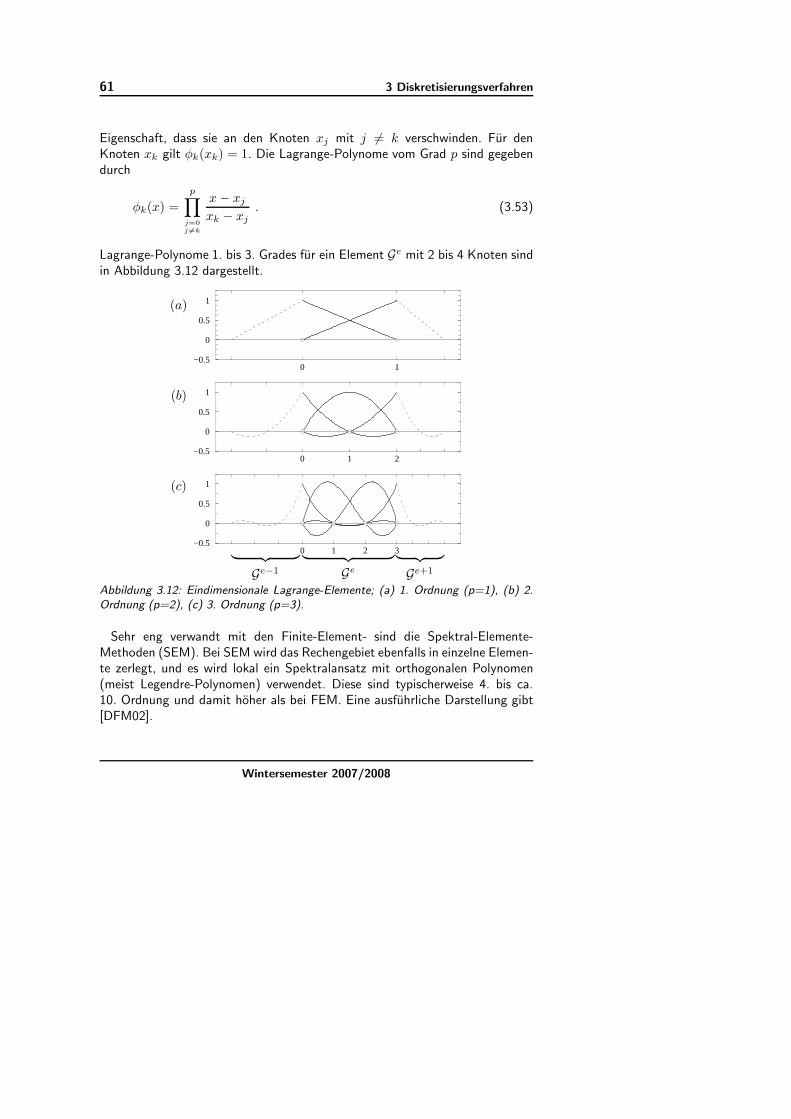
61 3 Diskretisierungsverfahren
Eigenschaft, dass sie an den Knoten xj mit j 6= k verschwinden. Fur denKnoten xk gilt φk(xk) = 1. Die Lagrange-Polynome vom Grad p sind gegebendurch
φk(x) =
p∏
j=0
j 6=k
x− xj
xk − xj. (3.53)
Lagrange-Polynome 1. bis 3. Grades fur ein Element Ge mit 2 bis 4 Knoten sindin Abbildung 3.12 dargestellt.
0 1 2 3−0.5
0
0.5
1
0 1 2−0.5
0
0.5
1
0 1−0.5
0
0.5
1(a)
(b)
(c)
︸ ︷︷ ︸Ge
︸ ︷︷ ︸Ge−1
︸ ︷︷ ︸Ge+1
Abbildung 3.12: Eindimensionale Lagrange-Elemente; (a) 1. Ordnung (p=1), (b) 2.Ordnung (p=2), (c) 3. Ordnung (p=3).
Sehr eng verwandt mit den Finite-Element- sind die Spektral-Elemente-Methoden (SEM). Bei SEM wird das Rechengebiet ebenfalls in einzelne Elemen-te zerlegt, und es wird lokal ein Spektralansatz mit orthogonalen Polynomen(meist Legendre-Polynomen) verwendet. Diese sind typischerweise 4. bis ca.10. Ordnung und damit hoher als bei FEM. Eine ausfuhrliche Darstellung gibt[DFM02].
Wintersemester 2007/2008

3.5 Eigenschaften und Analyse von Diskretisierungsverfahren 62
3.5 Eigenschaften und Analyse von Diskretisierungs-verfahren
Im folgenden werden Finite-Differenzen-Verfahren betrachtet, jedoch geltendie Einlassungen sinngemass auch fur andere Verfahren. Ebenfalls werdennur Anfangswert-Probleme betrachtet, da sich die Darstellung fur Anfangs-Randwert-Probleme nicht grundsatzlich unterscheidet. Es ist aber fur die Me-thoden zur Stabilitatsanalyse in Abschnitt 3.5.3 zu beachten, dass aus der Sta-bilitat des Anfangswert-Problems nicht grundsatzlich auch die Stabilitat desAnfangs-Randwert-Problems folgt.
Wir betrachten folgendes Anfangswert-Problem fur eine Funktion u(x, t)
P(x, t, ∂x, ∂t)[u] = f , u(x, 0) = g , (3.54)
das mit der Diskretisierung
PN (x, t, h, τ)[uN ] = fN , uN(x, 0) = gN (3.55)
approximiert wird, wobei uN(xj , tn) eine an den Stellen xj , t
n definierte Git-terfunktion ist, siehe Skizze 3.13. Im folgenden beschranken wir uns auf Finite-Differenzen-Schemata, gleiches gilt sinngemass auch fur andere Diskretisie-rungsverfahren. Im Unterschied hierzu sind bei der Methode der gewichteten
xj−1 xj xj+1
t
x
tn+1
tn
Abbildung 3.13: Skizze fur die Definition der Gitterfunktion uN auf den Stutzstellenxj = jh und tn = nτ .
Residuen die Ansatzfunktionen nicht nur an diskreten Stellen, sondern auf demganzen Definitionsbereich der Differentialgleichung definiert (allerdings erfolgt
29. November 2007
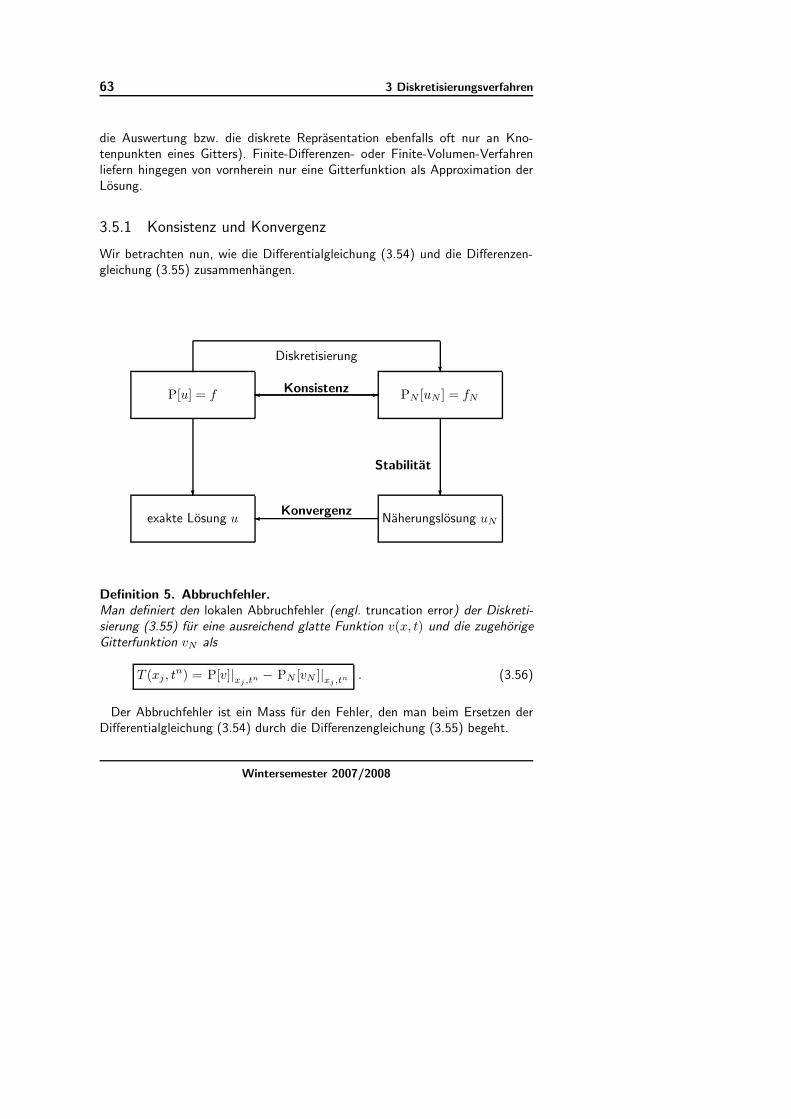
63 3 Diskretisierungsverfahren
die Auswertung bzw. die diskrete Reprasentation ebenfalls oft nur an Kno-tenpunkten eines Gitters). Finite-Differenzen- oder Finite-Volumen-Verfahrenliefern hingegen von vornherein nur eine Gitterfunktion als Approximation derLosung.
3.5.1 Konsistenz und Konvergenz
Wir betrachten nun, wie die Differentialgleichung (3.54) und die Differenzen-gleichung (3.55) zusammenhangen.
P[u] = f PN [uN ] = fN
exakte Losung u Naherungslosung uN
?Diskretisierung
-Konsistenz
Konvergenz
? ?
Stabilitat
Definition 5. Abbruchfehler.Man definiert den lokalen Abbruchfehler (engl. truncation error) der Diskreti-sierung (3.55) fur eine ausreichend glatte Funktion v(x, t) und die zugehorigeGitterfunktion vN als
T (xj , tn) = P[v]|xj ,tn − PN [vN ]|xj,tn . (3.56)
Der Abbruchfehler ist ein Mass fur den Fehler, den man beim Ersetzen derDifferentialgleichung (3.54) durch die Differenzengleichung (3.55) begeht.
Wintersemester 2007/2008

3.5 Eigenschaften und Analyse von Diskretisierungsverfahren 64
Beispiel 11. Abbruchfehler bei der Diskretisierung einer gewohnlichen Diffe-rentialgleichung:
d2u
dx2= f(x)
P[u] =d2u
dx2
zentrale Differenzen 2. Ordnung:
PN [uN ]|xj=uj+1 − 2uj + uj−1
h2
Abbruchfehler:
T (xj) =d2u
dx2
∣∣∣∣xj
− uj+1 − 2uj + uj−1
h2=
1
12h2u(IV )(xj)+ · · · = O(h2) .
Beispiel 12. Abbruchfehler bei der Diskretisierung einer partiellen Differential-gleichung:
∂u
∂t+∂u
∂x= 0
FTBS - Diskretisierung (forward-time, backward-space, d. h. Zeitintegration mitdem expliziten Eulerverfahren und linksseitige Differenzen 1. Ordnung fur dieraumliche Diskretisierung):
un+1j − un
j
τ+un
j − unj−1
h= 0
Abbruchfehler:
T (xj , tn) = P[u]|xj ,tn− PN [uN ]|xj ,tn
= −1
2τ ∂ttu(xj , t
n) +1
2h∂xx u(xj , t
n) + · · ·= O(τ) + O(h) .
29. November 2007
65 3 Diskretisierungsverfahren
Definition 6. Konsistenz.Gegeben sei die Differentialgleichung (3.54) und ein Finite-Differenzen-Schema(3.55). Das Finite-Differenzen-Schema heisst konsistent mit der Differentialglei-chung, wenn gilt:
‖T (xj , tn)‖ ≤ C(tn)(hp + τq) (3.57)
mit C, p, q > 0. In diesem Fall geht ‖T ‖ → 0 fur h, τ → 0. Man bezeichnet p, qauch als die Konsistenzordnung der raumlichen bzw. zeitlichen Diskretisierung.(‖ · ‖ ist eine sinnvoll definierte Norm, vergleiche Anhang A.1.)
Konsistenz bedeutet also Vertraglichkeit des Differenzenschemas mit der Dif-ferentialgleichung und ist eine Minimalforderung fur ein sinnvolles numerischesVerfahren.
Beispiel 13. Siehe Beispiel 11. Die Konsistenzordnung ist p = 2 mit
‖T (xj)‖ =1
12‖h2u(IV )(xj)‖ ≤ Ch2 .
Beispiel 14. Siehe Beispiel 12. Die Konsistenzordnung ist p = 1, q = 1 mit
‖T (xj, tn)‖ =
1
12‖τ ∂ttu(xj , t
n) + h ∂xxu(xj , tn)‖ ≤ C(τ + h) .
Definition 7. Konvergenz.Gegeben sei das Anfangswert-Problem (3.54) mit der Losung u(x, t) und dasFinite-Differenzen-Schema (3.55). Das Finite-Differenzen-Schema heisst kon-vergent, wenn fur alle xj und tn
‖unj − u(xj , t
n)‖ ≤ C(hp + τq) , (3.58)
mit C, p, q > 0 fur h, τ → 0. Man nennt p, q dann auch die Konvergenzordnungin x bzw. in t.
Ein konsistentes Schema ist nicht notwendigerweise auch konvergent. Kon-sistenz bedeutet, dass die diskreten Operatoren sinnvolle Approximationen derDifferentialoperatoren sind; Konvergenz bedeutet jedoch die viel starkere Aussa-ge, dass die diskrete Losung fur h, τ → 0 gegen die exakte Losung konvergiert.
Wintersemester 2007/2008

3.5 Eigenschaften und Analyse von Diskretisierungsverfahren 66
Beispiel 15. Das Lax-Friedrichs-Schema fur die Advektionsgleichung
∂tu+ a∂xu = 0
ist gegeben durch
un+1j =
1
2(un
j+1 + unj−1) −
1
2λ(un
j+1 − unj−1) ,
mit λ = aτ/h = const. Fur eine ausreichend glatte Funktion v(x, t) erhalt mandann als Abbruchfehler
T (tn) = ∂tv + a∂xv +1
2τ∂ttv −
1
2
h2
τ∂xxv + a
1
6h2∂xxxv + · · ·
− ∂tv − a∂xv
=1
2τ∂ttv −
1
2ah
λ∂xxv + · · · .
Die Konsistenzordnung ist p = 1, q = 1. Numerische Experimente zeigen, dassz. B. fur λ = 1.6 der Fehler ‖uN − u‖ unbeschrankt zunimmt, das Verfahrenist also instabil. Fur λ = 0.8 jedoch ist das Verfahren stabil.
3.5.2 Stabilitatsbegriffe
Aus Beispiel 15 erkennt man, dass noch ein weiterer Begriff notig ist, um die Ei-genschaften numerischer Diskretisierungsverfahren zu charakterisieren, die Sta-bilitat. Der Begriff der Stabilitat wird oft in vielerlei Bedeutung benutzt. Stabi-litat lasst sich allgemein umschreiben als
”begrenztes Storungswachstum“. Viele
unterschiedliche Prazisierungen (Stabilitatsbegriffe) wurden in der Literatur ein-gefuhrt, um verschiedenen Situationen gerecht zu werden. Hier behandeln wirzwei Begriffe: die Lax-Richtmyer- (LR-) Stabilitat und die asymptotische Stabi-litat. Dabei wird im folgenden die Betrachtung eingeschrankt auf Einschrittver-fahren und das reine Anfangswert-Problem fur eine lineare Differentialgleichungmit konstanten Koeffizienten. Einige Bemerkungen zu moglichen Verallgemei-nerungen sind auf Seite 70 angegeben.
Es kann fur inhomogene Probleme gezeigt werden, dass, wenn PN [uN ] = 0stabil ist, auch PN [uN ] = fN stabil ist, d. h. fur Stabilitatsuntersuchungen istes ausreichend, homogene Probleme zu betrachten [GKO95]. Wir beschrankenuns zunachst auf sogenennte Einschrittverfahren, d.h. solche Verfahren, diezur Berechnung der Losung zum neuen Zeitpunkt tn+1 lediglich die Losung
29. November 2007
67 3 Diskretisierungsverfahren
zu dem vorhergegangenen Zeitpunkt tn benotigen. Wir schreiben daher dieuntersuchten Einschrittverfahren fur die Differentialgleichung
P[u] = 0 (3.59)
als
PN [uN ] = 0 , (3.60a)
die in expliziter Form dargestellt werden konnen als
un+1N = G(h, τ) un
N (3.60b)
mit der Anfangsbedingung u0N . Auch bei der Verwendung impliziter Schemata
zur Zeitintegration kann die Diskretisierung in die Form der Gleichung (3.60b)gebracht werden. G wird als Schrittoperator oder Verstarkungsmatrix bezeich-net. Letztere Bezeichnung wird klar, wenn man realisiert, dass G auf einem(unendlichen) Vektor uN , der die Gitterfunktion, welche die Differenzenglei-chung lost, operiert.
Ausgehend von der Startlosung u0N kann die Losung zur Zeit t = nτ geschrie-
ben werden als
unN = Gun−1
N = . . . = Gnu0N . (3.61)
Wird die Anfangsbedingung u0N mit einer kleinen Grosse ε gestort, so erhalt
man
unN = Gn
(u0
N + ε), (3.62)
und im linearen Fall gilt dann
unN − un
N = Gnε. (3.63)
Die Potenzen Gn der Verstarkungsmatrix beschreiben also die Fortpflanzungvon Storungen und sind somit entscheidend fur die Stabilitat.
3.5.2.1 Lax-Richtmyer-Stabilitat
Definition 8. Lax-Richtmyer (LR) Stabilitat.Man betrachtet das Finite-Differenzen-Schema (3.60) in einem endlichen Zeit-bereich 0 ≤ tn = nτ ≤ T . Das Schema heisst Lax-Richtmyer (LR) -stabil,
Wintersemester 2007/2008
3.5 Eigenschaften und Analyse von Diskretisierungsverfahren 68
wenn es fur alle h, τ in einem gewissen Stabilitatsbereich S := (h, τ) | 0 <h ≤ h0, 0 < τ ≤ τ0 positive Konstanten Ks, αs gibt, so dass
‖Gn(h, τ)‖ ≤ Kseαsnτ (3.64a)
oder
‖uN(tn)‖ ≤ K(T ) ‖uN(0)‖ (3.64b)
mit K(T ) = KseαsT und fur alle Anfangsbedingungen uN(0).
Definition 3.64 besagt, dass die numerische Losung uN(tn) gleichmassig be-schrankt ist auf dem endlichen Intervall 0 ≤ tn = nτ ≤ T , unabhangig vonh, τ . Oft lasst sich die Forderung nach der Beschranktheit (3.64) nur erfullen,wenn zwischen τ und h eine Relation
τ ≤ λhp (3.65)
mit Konstanten λ > 0 und p, der Ordnung der Differentialgleichung, besteht.
3.5.2.2 Aquivalenztheorem von Lax-Richtmyer
Ohne Beweis geben wir einen zentralen Satz an, welcher Konvergenz, Kon-sistenz und Stabiliat verknupft; fur einen Beweis siehe z. B. [RM65, Str89,GKO95].
Satz 1. Aquivalenztheorem von Lax-RichtmyerWenn ein lineares Finite-Differenzen-Schema (3.60) konsistent ist mit einemsachgemass gestellten linearen Anfangswert-Problem, dann ist LR-Stabilitatnotwendig und hinreichend fur Konvergenz.
Neben der LR-Stabilitat werden weitere Stabilitatsbegriffe verwendet. Beson-ders im Zusammenhang mit der Matrix-Methode (siehe Kapitel 3.5.3.1) wirdder Begriff der asymptotische Stabilitat benutzt.
3.5.2.3 Asymptotische Stabilitat
Die asymptotische Stabilitat ist geeignet fur die Charakterisierung der Stabi-litat fur zeitlich nicht anwachsende Losungen, auch auf einem zeitlich nichtbegrenzten Bereich.
29. November 2007
69 3 Diskretisierungsverfahren
Definition 9. Asymptotische Stabilitat.Das Verfahren (3.60) heisst M-stabil, wenn eine Konstante C unabhangig vonn existiert, so dass fur festes h, τ
‖Gn‖ ≤ C fur n→ ∞ . (3.66)
Da τ fest bleibt, erstreckt sich hier der betrachtete zeitliche Integrationsbe-reich bis ins Unendliche.
Eine notwendige Bedingung fur die asymptotische Stabilitat ist offensicht-lich
|λi| ≤ 1, (3.67)
wobei λi die Eigenwerte von G bezeichnen. Diese Bedingung ist im allgemeinennoch nicht hinreichend. Hinreichend wird sie aber, wenn die Verstarkungsma-trix G normal, d. h. zu einer Diagonalmatrix ahnlich ist. Eine hinreichendeBedingung fur asymptotische Stabilitat ist
‖G‖ ≤ 1 , (3.68)
da stets ‖Gn‖ ≤ ‖G‖n.Eine notwendige und hinreichende Bedingung fur die asymptotische Sta-
bilitat ist, dass bei einer normalen Matrix G hochstens fur einen Eigenwerteinfacher Vielfachheit gilt
|λi| = 1
und fur die restlichen Eigenwerte
|λi| < 1.
3.5.2.4 Weitere Stabilitatsbegriffe
Oft verwendet man im Zusammenhang mit der Stabilitat weitere Bezeichnun-gen:
(1.) Unbedingt stabil: stabil fur alle h, τ .
(2.) Bedingt stabil: stabil fur bestimmte h, τ bzw. Kombinationen davon, z. B.τ/h ≤ C, CFL-Bedingung (siehe Kapitel 4.1.2).
Wintersemester 2007/2008
3.5 Eigenschaften und Analyse von Diskretisierungsverfahren 70
(3.) Absolut stabil: Der sehr wichtige Begriff der absoluten Stabilitat ist nurfur gewohnliche Differentialgleichungen definiert, siehe nachfolgende Bei-spiele 17 und 16. Man betrachtet die skalare Testgleichung u′ = λu(Dahlquist-Gleichung) mit λ ∈ C| . Der Schrittoperator des numerischenIntegrationsverfahrens sei G(λτ). Der Bereich z | |G(z)| < 1 der kom-plexen Ebene heisst Bereich der absoluten Stabilitat des Verfahrens.
Das Verfahren heisst absolut stabil, falls der Bereich der absoluten Stabi-litat die gesamte linke Halbebene umfasst und damit beliebige Zeitschrittefur abklingende Losungen ermoglicht. Ein absolut stabiles Verfahren in-tegriert eine exponentiell abklingende Losung derart, dass ihre Amplitudein jedem Schritt abnimmt. Asymptotische Stabilitat ist eine notwendigeBedingung fur absolute Stabilitat, aber nicht hinreichend.
Beispiel 16. In Abbildung 3.14 sind exemplarisch die Bereiche der absolutenStabilitat fur die Runge-Kutta-Verfahren verschiedener Ordnung aufgetragen,welche aus der Betrachtung der linearen Testgleichung u′ = λu hervorgehen(siehe auch Abschnitt 3.5.3.4, Linienmethode). Fur ein Runge-Kutta-Verfahrenmit Ordnung p ergibt sich allgemein
|G(z)| = |1 + z +z2
2+z3
6+ . . .+
zp
p!| < 1 (3.69)
als Bedingung fur den Bereich absoluter Stabilitat. Fur Runge-Kutta-Verfahrenmit p = 4 (vergleiche Anhang B.1) liegt die Stabilitatsgrenze fur reelles z bei−2.79 und fur imaginares z bei ±2.83i.
In der Einleitung wurde erwahnt, dass die Betrachtungen eingeschrankt warenauf Einschrittverfahren und reine Anfangswert-Probleme fur lineare Differential-gleichungen mit konstanten Koeffizienten. Fur die allgemeineren Falle machenwir folgende Bemerkungen:
(1.) Mehrschrittverfahren werden formal ahnlich behandelt, wenn man uN
ersetzt durch einen entsprechend verlangerten Vektor von Gitterfunktio-nen, der als Komponenten die vom Mehrschrittverfahren benutzten Wertefruherer Zeitschritte enthalt.
(2.) Fur lineare Probleme mit variablen Koeffizienten ist die Fouriermethode(siehe unten) schwieriger anzuwenden. Man kann aber zeigen, dass unterbestimmten Zusatzannahmen aus der Stabilitat fur konstante Koeffizien-ten auch Stabilitat fur variable Koeffizienten folgt [RM65, Str89, GKO95].
29. November 2007
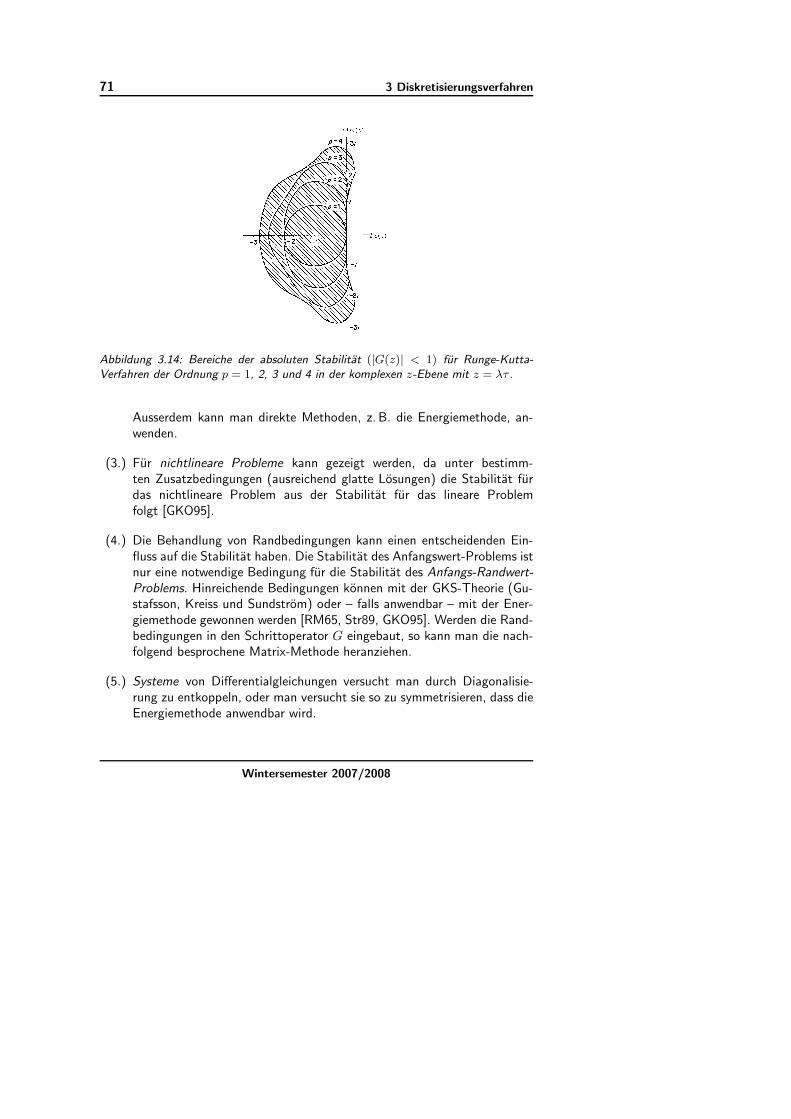
71 3 Diskretisierungsverfahren
i Im(z)
Re(z)
Abbildung 3.14: Bereiche der absoluten Stabilitat (|G(z)| < 1) fur Runge-Kutta-Verfahren der Ordnung p = 1, 2, 3 und 4 in der komplexen z-Ebene mit z = λτ .
Ausserdem kann man direkte Methoden, z. B. die Energiemethode, an-wenden.
(3.) Fur nichtlineare Probleme kann gezeigt werden, da unter bestimm-ten Zusatzbedingungen (ausreichend glatte Losungen) die Stabilitat furdas nichtlineare Problem aus der Stabilitat fur das lineare Problemfolgt [GKO95].
(4.) Die Behandlung von Randbedingungen kann einen entscheidenden Ein-fluss auf die Stabilitat haben. Die Stabilitat des Anfangswert-Problems istnur eine notwendige Bedingung fur die Stabilitat des Anfangs-Randwert-Problems. Hinreichende Bedingungen konnen mit der GKS-Theorie (Gu-stafsson, Kreiss und Sundstrom) oder – falls anwendbar – mit der Ener-giemethode gewonnen werden [RM65, Str89, GKO95]. Werden die Rand-bedingungen in den Schrittoperator G eingebaut, so kann man die nach-folgend besprochene Matrix-Methode heranziehen.
(5.) Systeme von Differentialgleichungen versucht man durch Diagonalisie-rung zu entkoppeln, oder man versucht sie so zu symmetrisieren, dass dieEnergiemethode anwendbar wird.
Wintersemester 2007/2008
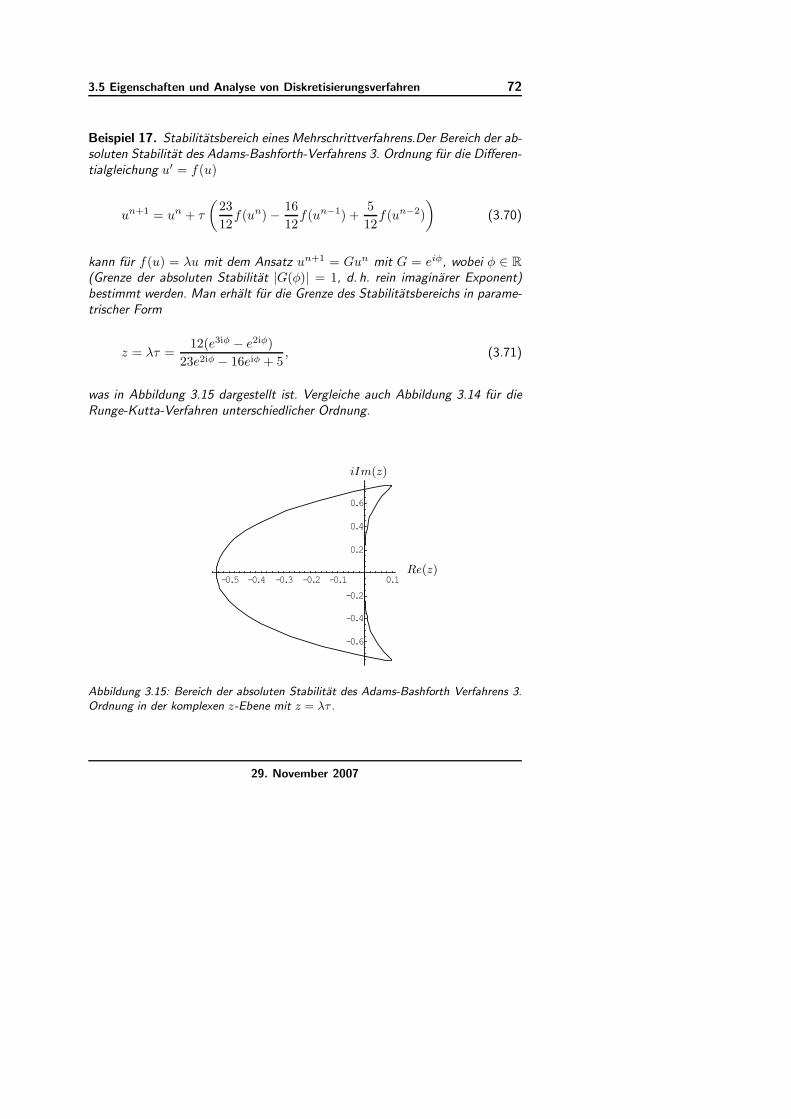
3.5 Eigenschaften und Analyse von Diskretisierungsverfahren 72
Beispiel 17. Stabilitatsbereich eines Mehrschrittverfahrens.Der Bereich der ab-soluten Stabilitat des Adams-Bashforth-Verfahrens 3. Ordnung fur die Differen-tialgleichung u′ = f(u)
un+1 = un + τ
(23
12f(un) − 16
12f(un−1) +
5
12f(un−2)
)(3.70)
kann fur f(u) = λu mit dem Ansatz un+1 = Gun mit G = eiφ, wobei φ ∈ R
(Grenze der absoluten Stabilitat |G(φ)| = 1, d. h. rein imaginarer Exponent)bestimmt werden. Man erhalt fur die Grenze des Stabilitatsbereichs in parame-trischer Form
z = λτ =12(e3iφ − e2iφ)
23e2iφ − 16eiφ + 5, (3.71)
was in Abbildung 3.15 dargestellt ist. Vergleiche auch Abbildung 3.14 fur dieRunge-Kutta-Verfahren unterschiedlicher Ordnung.
-0.5 -0.4 -0.3 -0.2 -0.1 0.1
-0.6
-0.4
-0.2
0.2
0.4
0.6
Re(z)
iIm(z)
Abbildung 3.15: Bereich der absoluten Stabilitat des Adams-Bashforth Verfahrens 3.Ordnung in der komplexen z-Ebene mit z = λτ .
29. November 2007
73 3 Diskretisierungsverfahren
3.5.3 Methoden zur Stabilitatsanalyse
3.5.3.1 Matrix-Methode
Die sogenannte Matrix-Methode ist so allgemein, dass man formal mit ihr auchAnfangs-Randwert-Probleme behandeln kann. Jedoch ist es meist schwierig,Stabilitat fur alle (h, τ) ∈ S zu zeigen. Gegeben seien die Gitterfunktionen un
N
als Losung des homogenen Finite-Differenzen-Schemas (3.60)
un+1N = G(h, τ)un
N , (3.72)
wobei der Differenzenoperator G(h, τ) hier Matrixgestalt hat (G multipliziertden Vektor un
N , um den Losungsvektor un+1N zu erhalten). Daraus folgt (siehe
Gleichung (3.61))
unN = Gnu0
N . (3.73)
Offenbar ist (3.60) LR-stabil genau dann, wenn eine Abschatzung gilt
‖Gn‖ ≤ K(T ) (3.74)
fur alle (h, τ) ∈ S und 0 ≤ nτ ≤ T , gemass der Stabilitatsbedingung (3.64b).Eine hinreichende Bedingung fur LR-Stabilitat ist gegeben durch
‖G‖ ≤ 1 + O(τ) , (3.75)
denn daraus folgt mit n ≤ N,T = Nτ und 1 + x ≤ ex die Abschatzung
‖Gn‖ ≤ ‖G‖n ≤ (1+Cτ)n =
(1 + C
T
N
)n
≤ eC TN
n ≤ eCT =: K(T ) , (3.76)
wobei C die Konstante in (3.75) ist.Eine notwendige Bedingung fur LR-Stabilitat ist gegeben durch das von-
Neumann-Kriterium
ρ(G) ≤ 1 + O(τ) , (3.77)
worin ρ(G) der Spektralradius der Matrix G ist, welcher definiert ist als Betragdes betragsmassig grossten Eigenwerts. Das kann man erkennen durch folgendeUberlegung:
‖Gn‖ = supv
‖Gnv‖‖v‖ ≥ ‖Gnw‖
‖w‖ = |λmax|n = ρ(G)n , (3.78)
Wintersemester 2007/2008
3.5 Eigenschaften und Analyse von Diskretisierungsverfahren 74
wenn man w als den zum betragsmaximalen Eigenwert |λmax| von G zugehori-gen Eigenvektor nimmt. (Das Supremum sup ist definiert als die kleinste obereSchranke (vgl. max).) Damit gilt offensichtlich
‖Gn‖ ≥ ρ(G)n (3.79)
und somit mit tn = nτ , K = K(T ). Nach der Definition gemass Gl. (3.64)kann dann stets ein K(T ) gefunden werden, fur das gilt
ρ(G) ≤ K1/N = Kτ/T = exp
(τ · lnK
T
)≤ 1 + Cτ (3.80)
fur 0 < τ ≤ τ0, wobei C eine geeignet gewahlte Konstante ist. Also ist beiVorliegen von LR-Stabilitat auch (3.77) erfullt.
Um die Frage zu beantworten, unter welchen Bedingungen das von-Neumann-Kriterium (3.77) auch ein hinreichendes Kriterium fur LR-Stabilitat ist, gehtman aus von
ρ(G) ≤ ‖G‖ , (3.81)
einer Relation gultig fur alle Matrixnormen (n = 1 in Gl. (3.78)). Betrachtetman nun die L2-Norm und nimmt an, dass G diagonalisierbar ist,
G = T−1ΛT , (3.82)
erhalt man folgende Abschatzung
ρ(G) ≤ ‖G‖2 ≤ ‖T−1‖2 ‖Λ‖2 ‖T ‖2 , (3.83)
die auf die Identitat
ρ(G) = ‖G‖2 (3.84)
fuhrt, wenn ‖T ‖2 = 1, das heisst wenn G unitar diagonalisierbar ist. Das istder Fall, wenn G eine sogenannte normale Matrix ist, d. h.
GG⋆ = G⋆G (3.85)
erfullt ist, wobei G⋆ die komplex-konjugiert transponierte Matrix von G ist.Es ist dann insbesondere ‖T ‖2 gleichmassig, d.h. unabhangig von h und τ ,beschrankt.
29. November 2007
75 3 Diskretisierungsverfahren
Beispiel 18. Betrachtet wird das Finite-Differenzen-Schema
un+1j = un
j +τ
2h(un
j+1 − unj−1) (3.86)
fur die Stutzstellen xj , j = 0, . . . , N . An den Randern wird das Schema modi-fizert, um zu vermeiden, dass Gitterpunkte x−1 und xN+1 benotigt werden,
un+10 = un
0 +τ
h(u1 − u0) , un+1
N = unN +
τ
h(uN − uN−1) . (3.87)
Der Differenzenoperator G ist nicht normal
GG⋆ 6= G⋆G , (3.88)
wie man durch Ausrechnen der ersten paar Matrixelemente zeigen kann. Alsoliefert das von-Neumann-Kriterium in diesem Fall keine hinreichende Bedingungfur LR-Stabilitat.
Beispiel 19. Betrachtet man Beispiel 18 jetzt mit periodischen Randbedin-gungen, d. h. un
j = unj+N , dann kann man das innere Schema (3.86) auch
uber den Rand hinaus fortsetzen, und G wird eine sogenannte zyklische Ma-trix, d. h. eine Matrix, bei der sich alle Eintrage mit zunehmendem Zeilenindexum je eine Spalte nach rechts verschieben: was den rechten Rand der Matrixuberschreitet, kommt am linken Rand wieder herein. In diesem Fall ist das von-Neumann-Kriterium eine hinreichende Bedingung fur LR-Stabilitat.
Wir haben also gesehen, dass fur Differenzenoperatoren PN [uN ], die auf nor-male Matrizen G(h, τ) fuhren, das von-Neumann-Kriterium notwendig und hin-reichend fur LR-Stabilitat ist.
Wir schranken nun die Betrachtung weiter ein auf zyklische Matrizen G,wie sie typischerweise bei der Anwendung von Finite-Differenzen-Verfahren aufProbleme mit periodischen Randern auftreten. Allgemein gilt, dass zyklischeMatrizen normale Matrizen sind. Eine zyklische N ×N Matrix
c0 c1 · · · cN−1
cN−1 c0 · · · cN−2
...c1 c2 · · · c0
(3.89)
Wintersemester 2007/2008

3.5 Eigenschaften und Analyse von Diskretisierungsverfahren 76
ist vollstandig beschrieben durch die Elemente einer Zeile c0, . . . , cN−1. DieEigenwerte einer zyklischen N ×N Matrix kann man allgemein berechnen als
λk =N−1∑
j=0
cjei2πkj/N k = 0, . . . , N − 1 . (3.90)
Beispiel 20. Fur Beispiel 19 erhalt man mit c0 = 1, c−1 := cN−1 = −τ/(2h),c1 = τ/(2h) und cj = 0 sonst
λk = 1 +τ
2h(ei2πk/N − e−i2πk/N ) = 1 +
τ
hi sin
(2πk
N
). (3.91)
Die Eigenvektoren einer zyklischen Matrix bilden die Fouriermatrix. Die Fou-riertransformation eines 2π-periodischen Losungsvektors entspricht der Multi-plikation mit der Fouriermatrix. Die Fouriertransformation des Differenzenope-rators G(h, τ), welcher die Form einer zyklischen Matrix hat, entspricht somitder seiner Diagonaltransformation. Man kann also das von-Neumann-Kriterium(3.77) bezuglich des Spektralradius von G(h, τ) auch uberprufen, indem mandie Fouriertransformierte von uN untersucht. Diese Vorgehensweise ist Gegen-stand der Fouriermethode oder von-Neumann-Methode, die wir nun beschrei-ben. Man beachte, dass der Index k des Eigenwerts λk der Wellenzahl ξ einerFourierreihendarstellung der Gitterfunktion uN entspricht, mehr dazu im fol-genden Abschnitt.
3.5.3.2 Von-Neumann-Methode
Die Stabilitatsanalyse nach von Neumann ist die aus praktischer Sicht bedeu-tendste und am meisten verwendete Form. Sie gilt zunachst nur das reine An-fangswertproblem fur lineare Differentialgleichungen mit konstanten Koeffizien-ten. Das Anfangswertproblem (auf einem unendlichen Gebiet) wird numerischmeist durch ein periodisches Gebiet mit sogenannten periodischen Randbedin-gungen dargestellt (im mathematischen Sinne sind dies allerdings keine Rand-bedingungen).
Gegeben sei eine 2π-periodische Gitterfunktion uN an N + 1 Stellen 0 ≤xj = jh = 2πj/N ≤ 2π, j = 0, . . . , N , siehe Skizze 3.16. Man setzt zunachsteine Fourierreihe an fur uN
unj =
N/2∑
ξ=−N/2
un(ξ)eiξxj . (3.92)
29. November 2007
77 3 Diskretisierungsverfahren
x0 xj xN
uj
Abbildung 3.16: Periodische Gitterfunktion uN .
Setzt man diese fur uN in (3.60b) ein, dann erhalt man
N/2∑
ξ=−N/2
un+1(ξ)eiξxj =
N/2∑
ξ=−N/2
un(ξ)Geiξxj (3.93)
fur alle Stellen j = 0, . . . , N . Der Term Geiξxj bedeutet dabei, dass derdurch G beschriebene Differenzenoperator auf eiξxj angewendet wird anstelleauf un
j . Man erreicht dadurch, dass raumliche und zeitliche Entwicklung derLosung separiert werden. Die Wellenzahl ξ liegt in dem Intervall 0 ≤ |ξ| ≤N/2 = π/h. Man bezeichnet die grosste auftretende Wellenzahl π/h auch alsNyquist-Wellenzahl. Um die weitere Notation zu vereinfachen, nehmen wir nunan, dass G(h, τ) eine zyklische Matrix ist und dass man alternativ schreibenkann
un+1N = Gun
N , (3.94)
oder aquivalent
un+1j =
νr∑
ν=−νl
Aνunj+ν . (3.95)
Wintersemester 2007/2008
3.5 Eigenschaften und Analyse von Diskretisierungsverfahren 78
Aν sind somit die nicht-verschwindenden Elemente einer Zeile der Matrix G,zentriert um die Hauptdiagonale.
Beispiel 21. Betrachten wir als Beispiel wieder das Schema (3.86)
un+1j = un
j +τ
2h(un
j+1 − unj−1) . (3.96)
Dann ist νl = 1, νr = 1, A−1 = −τ/2h, A0 = 1, A1 = τ/2h.
Mit dieser Notation erhalt man fur die Fouriertransformierte von (3.60) denAusdruck
N/2∑
ξ=−N/2
un+1(ξ)eiξxj =
N/2∑
ξ=−N/2
un(ξ)Geiξxj
=
N/2∑
ξ=−N/2
un(ξ)eiξxj
νr∑
ν=−νl
Aνeiνξ
︸ ︷︷ ︸=:G(ξ)
=
N/2∑
ξ=−N/2
eiξxj un(ξ)G(ξ) .(3.97)
G(ξ) bezeichnet man als das Symbol des Finite-Differenzen-Schemas. Wegender zwischen uN und seiner Fouriertransformierten gultigen Parseval-Relation
‖unN‖2 =
∑
k
|un(ξ)|2, (3.98)
erhalt man LR-Stabilitat nach (3.64a) genau dann, wenn fur alle |ξ| ≤ N/2eine Abschatzung
|Gn(ξ)| ≤ Kseαsnτ (3.99)
besteht, und hieraus das oben schon im Rahmen der Matrixmethode angegebenevon-Neumann-Kriterium
maxξ
|G(ξ)|︸ ︷︷ ︸
=ρ(G)
≤ 1 + O(τ) . (3.100)
Beispiel 22. Gegeben sei das Anfangswertproblem fur die skalare Advektions-gleichung
∂u
∂t+ a
∂u
∂x= 0 . (3.101)
29. November 2007

79 3 Diskretisierungsverfahren
Zeitintegration mit dem expliziten Euler-Verfahren zusammen mit zentralenDifferenzen 2. Ordnung fur die raumliche Diskretisierung (FTCS) liefert diediskretisierte Gleichung
un+1j − un
j
τ+ a
unj+1 − un
j−1
2h= 0 . (3.102)
Einsetzen des Fourier-Ansatzes und getrennte Betrachtung der individuellenGleichungen fur jede Fourier-Mode (lineares Problem) liefert fur alle ξ
u(ξ)n+1 − u(ξ)n
τ+
a
2hu(ξ)n2i sin(ξ′) = 0 , ξ′ := ξh =
2πξ
N.
Mit
u(ξ)n+1 = G(ξ)u(ξ)n und σ =aτ
h
erhalt man fur den Betrag des Verstarkungsfaktors G
|G(ξ)|2 = 1 + σ2 sin2(ξ′) > 1 .
Das obige Diskretisierungsverfahren ist im Fall der skalaren Advektionsgleichungalso stets instabil (nach Lax-Richtmyer und asymptotisch).
3.5.3.3 Methode der modifizierten Differentialgleichung
Bei dieser Methode der Stabilitatsanalyse werden die fuhrenden Fehlerterme derDiskretisierung mitberucksichtigt. Damit kann bestimmt werden, welche modi-fizierte Differentialgleichung durch das Differenzenschema approximiert wird.
Beispiel 23. Es soll die skalare Advektionsgleichung (3.101) mit explizi-tem Euler-Verfahren in der Zeit und zentralen Differenzen im Raum (Sche-ma (3.102)) betrachtet werden. Der Abbruchfehler ergibt sich zu
T (xj , tn) = −1
2τ∂ttu(xj , t
n) − 1
6h2a∂xxxu(xj , t
n) + O(τ2, h4) .
Aus der Differentialgleichung (3.101) folgt
∂ttu = a2∂xxu,
Wintersemester 2007/2008

3.5 Eigenschaften und Analyse von Diskretisierungsverfahren 80
was auf die modifizierte Differentialgleichung
∂tu+ a∂xu = −1
2a2τ∂xxu + O(τ2, h2)
fuhrt, d. h. es wird effektiv eine Advektions-Diffusions-Gleichung mit Viskositatνeff = − 1
2a2τ approximiert. Da νeff < 0, ist die Losung dieser modifizierten Dif-
ferentialgleichung stets instabil (engl. ill-posed). Dieses Ergebnis ist konsistentmit der von-Neumann-Analyse aus Beispiel 22.
Beispiel 24. Die Aufwind-Diskretisierung der Gleichung (3.101) (siehe Bei-spiel 12) fuhrt auf die modifizierte Differentialgleichung
∂tu+ a∂xu =
(1
2ah− 1
2a2τ
)∂xxu + O(τ2, h2) (3.103)
mit νeff = a2 (h− a∆t). Die Bedingung νeff ≥ 0 liefert als Stabilitatskriterium
σ = aτh ≤ 1. Dies ist konsistent mit dem CFL-Kriterium (siehe auch Kapitel
4.1.2).
Der Faktor νeff wird auch als numerische Viskositat bezeichnet. Obwohl dienumerische Viskositat die numerische Losung verfalschen kann, hat sie aberauch die willkommene Eigenschaft, den Einfluss von Rundungsfehlern zu damp-fen. Bei manchen Diskretisierungsverfahren (insbesondere auch bei reibungsfrei-en Problemen, etwa bei der Losung der Euler-Gleichung) wird deshalb ein solchernumerischer Dampfungsterm mit Absicht zusatzlich in das Schema eingefuhrt(kunstliche Viskositat). Dessen Grosse (Wert des numerischen Verfahrens) mussempirisch bestimmt werden [Hir90].
3.5.3.4 Linienmethode
Man kann die raumliche und zeitliche Diskretisierung zum Zwecke der Sta-bilitatsuntersuchung auch separat betrachten. Wenn man in der Differential-gleichung (3.59) zunachst nur die auftretenden raumlichen Ableitungen diskre-tisiert, die Zeitableitung aber weiterhin kontinuierlich betrachtet, dann erhaltman die sogenannte Semidiskretisierung dieser Gleichung. Nehmen wir der Ein-fachheit halber an, dass nur eine Zeitableitung erster Ordnung ∂u/∂t in (3.59)auftritt, also
∂u
∂t= L(u) . (3.104)
29. November 2007
81 3 Diskretisierungsverfahren
Dann schreiben wir in Analogie zu dem Einschrittverfahren (3.60) fur die Se-midiskretisierung
duN
dt= LN (h)uN . (3.105)
Offenbar hat man durch die Diskretisierung der raumlichen Ableitungen diepartielle Differentialgleichung (3.59) in ein System von gewohnlichen Differen-tialgleichungen fur die zeitabhangige Gitterfunktion uN (t) transformiert. Dieseskann mit einem Standardverfahren zur Integration gewohnlicher Differentialglei-chungen (z. B. Runge-Kutta) behandelt werden. Zur Stabilitatsuntersuchungkann man (wenn die oben genannten Gultigkeitsvoraussetzungen erfullt sind)die Fouriermethode anwenden, wobei nun aber die Amplitude u(ξ, t) eine kon-tinuierliche Funktion der Zeit t ist. Man erhalt
du
dt= LN (ξ)u(ξ, t) , (3.106)
wobei LN hier zu verstehen ist als das Symbol der Semidiskretisierung. Um Sta-bilitat sicherzustellen, muss dann fur jede einzelne Gleichung des Systems LN (ξ)im Stabilitatsbereich des Integrationsverfahrens liegen, welchen man durchdie Betrachtung der skalaren, linearen Testgleichung (Dahlquist-Gleichung)u′ = λu, λ = const. bestimmen kann (siehe absolute Stabilitat weiter oben).
Eine entsprechende Erweiterung gilt auch fur Mehrschrittverfahren, z. B.das Adams-Bashforth-Verfahren (Beispiel 17) oder das Runge-Kutta-Verfahren(Beispiel 16).
[CHQZ88] C. Canuto, M. Y. Hussaini, A. Quarteroni, and T. A. Zang. SpectralMethods in Fluid Dynamics. Springer, Berlin, Germany, 1988.
[DFM02] M. O. Deville, P. F. Fischer, and E. H. Mund. High-Order Me-thods for Incompressible Fluid Flow. Cambridge University Press,Cambridge, 2002.
[GKO95] B. Gustafsson, H.-O. Kreiss, and J. Oliger. Time Dependent Pro-blems and Difference Methods. John Wiley & Sons, New York,1995.
[Hir90] C. Hirsch. Numerical Computation of Internal and External Flows.John Wiley & Sons, Chichester, 1990.
Wintersemester 2007/2008

3.5 Eigenschaften und Analyse von Diskretisierungsverfahren 82
[RM65] R. D. Richtmyer and K. W. Morton. Difference Methods for Initial-Value Problems. John Wiley & Sons, New York, 2nd edition, 1965.
[Str89] J. C. Strikwerda. Finite Difference Schemes and Partial DifferentialEquations. Wadsworth & Brooks/Cole, Belmont, 1989.
[TAP97] J. C. Tannehill, D. A. Anderson, and R. H. Pletcher. ComputationalFluid Dynamics and Heat Transfer. Taylor & Francis, Washington,London, 2nd edition, 1997.
[VM95] H. K. Versteeg and W. Malalasekera. An Introduction to Compu-tational Fluid Dynamics – The Finite Volume Method. Longman,Essex, 1995.
29. November 2007
83
Kapitel 4
Grundtypen von Losungsverfahren
4.1 Hyperbolische Gleichungen
Die Grundlagen der hyperbolischen Differentialgleichungen wurden im Kapi-tel 2.5.3 besprochen. Zur numerischen Losung von hyperbolischen Gleichungenbieten sich Charakteristikenverfahren oder Differenzenschemata (siehe Kapi-tel 4.1.1) an.
Charakteristikenverfahren wurden fruher insbesondere zur Losung der eindi-mensionalen instationaren Euler-Gleichungen und fur stationare zweidimensio-nale, reibungsfreie Uberschallstromungen angewendet [TAP97]. Dabei werdendie Gleichungen auf die charakteristischen Variablen transformiert und das ent-stehende System wird zusammen mit den Gleichungen fur die Charakteristikennumerisch integriert. So wird die numerische Losung auf eine Integration vongekoppelten gewohnlichen Differentialgleichungen zuruckgefuhrt, die im allge-meinen iterativ gelost werden mussen. Im Falle von drei oder mehr unabhangigenVariablen wird das Charakteristikenverfahren jedoch kompliziert. Charakteristi-kenverfahren sind heute weitgehend durch die einfachere direkte Diskretisierungder Ausgangsgleichungen ersetzt worden.
4.1.1 Wichtige Diskretisierungsschemata
Betrachtet wird als Modell die lineare Advektionsgleichung fur eine Funktionu(x, t)
∂u
∂t+ a
∂u
∂x= 0 (4.1)
mit konstantem a, der Anfangsbedingung u(x, 0) = g(x) und gegebenenfallsRandbedingungen an dem Rand mit eintretender Charakteristik (sachgemassgestelltes Problem). Die Losung des reinen Anfangswertproblems ist u(x, t) =g(x− at).
Wintersemester 2007/2008
4.1 Hyperbolische Gleichungen 84
Im folgenden werden einige wichtige Finite-Differenzen-Schemata fur hyper-bolische Gleichungen eingefuhrt und ihre Eigenschaften kurz charakterisiert.Fur Stabilitatsbetrachtungen (siehe Kapitel 4.1.2) fuhrt man die nach Courant,Friedrichs und Lewy benannte CFL-Zahl
σ = a∆t/h (4.2)
ein. Weitere Eigenschaften, insbesondere Amplituden- und Phasenfehler bei derBerechnung wellenformiger Losungen, werden in Kapitel 4.1.2 besprochen. Eineausfuhrliche Diskussion findet man z. B. in [TAP97].
4.1.1.1 Aufwind-Verfahren erster Ordnung mit explizitem Euler-Verfahren
Das Aufwind-Verfahren erster Ordnung lautet
un+1j − un
j
τ= −a+ |a|
2h
(un
j − unj−1
)− a− |a|
2h
(un
j+1 − unj
). (4.3)
Fur die raumliche Diskretisierung werden im Falle a > 0 linksseitige Diffe-renzen verwendet (zweiter Summand in Gleichung (4.3) verschwindet, FTBSfur forward-time, backward-space), fur a < 0 rechtsseitige Differenzen (ersterSummand verschwindet). Dieses Verfahren ist von der Ordnung O(τ, h) und iststabil fur |σ| ≤ 1 (siehe auch Kapitel 3.5). Die modifizierte Differentialgleichunglautet (siehe Kapitel 3.5.3.3)
∂u
∂t+ a
∂u
∂x=
|a|h2
(1 − |σ|)∂2u
∂x2+ ... . (4.4)
Der fuhrende Fehlerterm ist dissipativ und fuhrt zu einer ausgepragten Ver-schmierung von starken Gradienten in der Losung, weshalb das Verfahren nurbeschrankt einsetzbar ist (vgl. Abb. 4.2a). Bei diesem Verfahren wird fur denSonderfall |σ| = 1 die exakte Losung erhalten.
4.1.1.2 Leapfrog-Verfahren
Das Leapfrog-Verfahren
un+1j − un−1
j
2τ= − a
2h(un
j+1 − unj−1 ) (4.5)
29. November 2007

85 4 Grundtypen von Losungsverfahren
ist von zweiter Ordnung im Raum und in der Zeit und ist stabil fur |σ| ≤ 1. Diemodifizierte Gleichung fur das Leapfrog-Verfahren lautet
∂u
∂t+ a
∂u
∂x=
ah2
6(σ2 − 1)
∂3u
∂x3+ ... . (4.6)
Der fuhrende Fehlerterm ist dispersiver Natur. Die Amplitude sinusformigerWellen bleibt exakt erhalten (kein Amplitudenfehler). Dies hat allerdings auchNachteile: numerische Fehler werden nicht gedampft (vgl. Abb. 4.2b).
4.1.1.3 Zentrales Differenzenverfahren mit explizitem Eulerverfahren
Das zentrale Differenzenverfahren
un+1j − un
j
τ= − a
2h(un
j+1 − unj−1 ) (4.7)
ist von zweiter Ordnung im Raum in Kombination mit dem expliziten Euler-verfahren fur die Zeitintegration (FTCS, forward-time centered-space), und istunbedingt instabil (vgl. Kapitel 3.5.3). Die modifizierte Gleichung fur diesesDifferenzenverfahren lautet
∂u
∂t+ a
∂u
∂x= − a2τ
2
∂2u
∂x2+ ... . (4.8)
Der fuhrende Fehlerterm ist dissipativ mit negativer Diffusionskonstante−a2τ/2. Eine solche Gleichung kann nicht auf ein sachgemass gestelltes Pro-blem fuhren; darin spiegelt sich die unbedingte Instabilitat wider.
4.1.1.4 Lax-Wendroff-Verfahren
Aus obigem zentralen Differenzenverfahren (4.7) kann ein bedingt stabiles Ver-fahren gewonnen werden, wenn ein zusatzlicher Dampfungsterm eingefuhrtwird. Dies fuhrt auf das viel benutzte Lax-Wendroff-Verfahren
un+1j − un
j
τ= − a
2h(un
j+1−unj−1 ) +
a2τ
2h2(un
j−1 −2 unj +un
j+1) . (4.9)
Das Lax-Wendroff-Verfahren ist von zweiter Ordnung im Raum und in der Zeit,und ist stabil fur |σ| ≤ 1. Die modifizierte Gleichung fur das Lax-Wendroff-Verfahren lautet
∂u
∂t+ a
∂u
∂x=
ah2
6(σ2 − 1)
∂3u
∂x3+ ... . (4.10)
Wintersemester 2007/2008

4.1 Hyperbolische Gleichungen 86
Man erkennt, dass der Fehlerterm in (4.8) durch den Zusatzterm in (4.9) kom-pensiert wurde.
4.1.1.5 MacCormack-Verfahren
Das MacCormack-Verfahren ist ein zweistufiges”Pradiktor-Korrektor-
Verfahren“. Der”Pradiktor-Schritt“ fur die zunachst berechnete Zwi-
schenlosung lautet
un+1j = un
j − aτ
h(un
j+1 − unj ) , (4.11a)
und der”Korrektor-Schritt“
un+1j =
1
2
[un
j + un+1j − aτ
h( un+1
j − un+1j−1 )
]. (4.11b)
Fur die lineare Advektionsgleichung ist das MacCormack-Verfahren identischmit dem Lax-Wendroff-Verfahren und somit stabil fur |σ| ≤ 1.
4.1.2 Analyse von Verfahren fur lineare Gleichungen
4.1.2.1 CFL-Bedingung
Wir betrachten als Modellgleichung wiederum die skalare Advektionsgleichung
∂u
∂t+ a
∂u
∂x= 0 (4.12)
auf x ∈ IR mit a > 0 und u(x, 0) = g(x).Fur die analytische Losung von Gleichung (4.12) wird das analytische
Abhangigkeitsgebiet mittels der Charakteristiken x(t) = x+ at bestimmt. Dasnumerische Abhangigkeitsgebiet des Punktes P (siehe Skizze 4.1) umfasst dieje-nigen Punkte in der diskretisierten x-t-Ebene, von denen die numerische Losungim Punkt P abhangt. Es ist durch den Differenzenstern (
”stencil“) des Verfah-
rens gegeben. Die sogenannte CFL-Bedingung besagt, dass das numerischeAbhangigkeitsgebiet das analytische umfassen muss, also die Charakteristikender Differentialgleichung innerhalb des numerischen Abhangigkeitsgebiets lie-gen mussen. Die CFL-Bedingung ist notwendig (jedoch nicht hinreichend) furdie Stabilitat der numerischen Diskretisierung. Durch die CFL-Bedingung wirdimpliziert, dass fur ein 3-Punkte-Schema die Informationen in einem Zeitschritt
29. November 2007
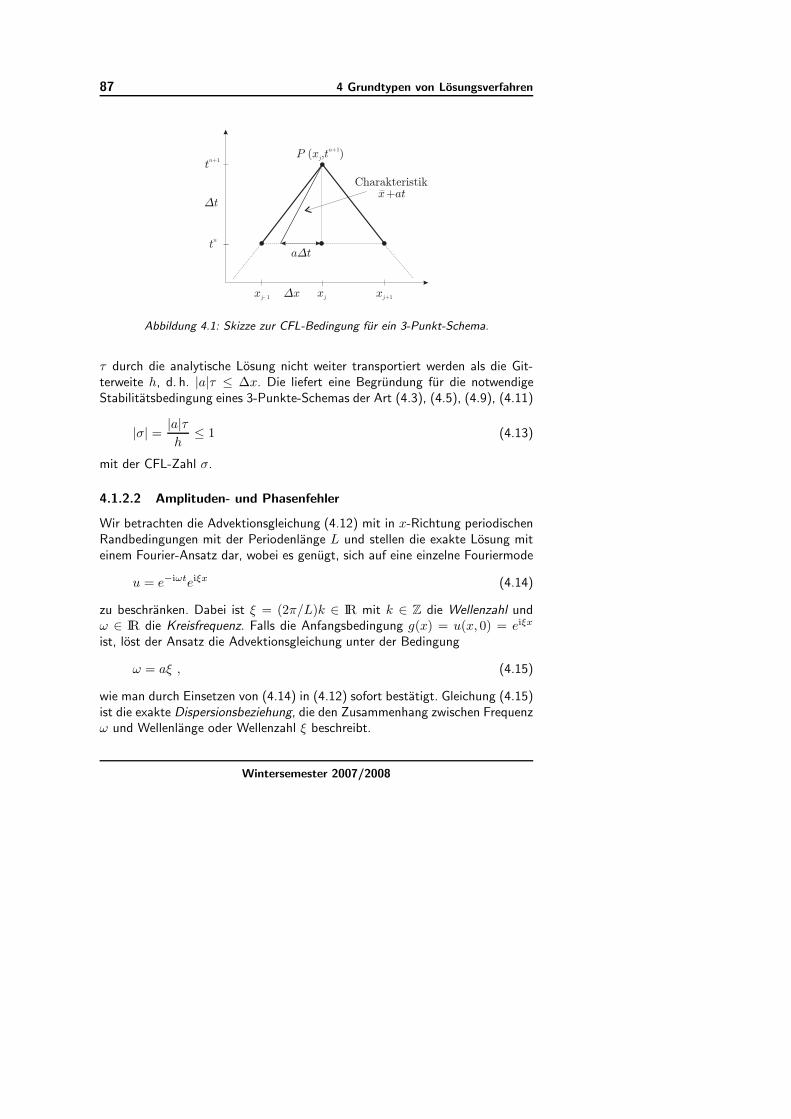
87 4 Grundtypen von Losungsverfahren
P x t( , )j
n+1
tn
xjxj- 1 xj+1
tn+1
a t¢
¢x
¢t
Charakteristik+x at
Abbildung 4.1: Skizze zur CFL-Bedingung fur ein 3-Punkt-Schema.
τ durch die analytische Losung nicht weiter transportiert werden als die Git-terweite h, d. h. |a|τ ≤ ∆x. Die liefert eine Begrundung fur die notwendigeStabilitatsbedingung eines 3-Punkte-Schemas der Art (4.3), (4.5), (4.9), (4.11)
|σ| =|a|τh
≤ 1 (4.13)
mit der CFL-Zahl σ.
4.1.2.2 Amplituden- und Phasenfehler
Wir betrachten die Advektionsgleichung (4.12) mit in x-Richtung periodischenRandbedingungen mit der Periodenlange L und stellen die exakte Losung miteinem Fourier-Ansatz dar, wobei es genugt, sich auf eine einzelne Fouriermode
u = e−iωteiξx (4.14)
zu beschranken. Dabei ist ξ = (2π/L)k ∈ IR mit k ∈ Z die Wellenzahl undω ∈ IR die Kreisfrequenz. Falls die Anfangsbedingung g(x) = u(x, 0) = eiξx
ist, lost der Ansatz die Advektionsgleichung unter der Bedingung
ω = aξ , (4.15)
wie man durch Einsetzen von (4.14) in (4.12) sofort bestatigt. Gleichung (4.15)ist die exakte Dispersionsbeziehung, die den Zusammenhang zwischen Frequenzω und Wellenlange oder Wellenzahl ξ beschreibt.
Wintersemester 2007/2008

4.1 Hyperbolische Gleichungen 88
Die numerische Losung eines Einschritt-Diskretisierungsschemas fur (4.12)auf dem Gitter xj = jh, ∆x = L/N ,
un+1j =
∑
i
Gji(h, τ)uni (4.16)
mit der Verstarkungsmatrix Gji, wird in Analogie zur exakten Losung (4.14)dargestellt als
unj = e−iωtn
eiξxj , (4.17)
mit einer noch zu charakterisierenden, i. a. komplexen Dispersionsbeziehung
ω = ω(ξ) = ωr + iωi ∈ C| . (4.18)
Es ergibt sich damit
e−iωtn+1
eiξxj =∑
i
Gjie−iωtn
eiξxi (4.19)
und mit tn+1 = tn + τ und Division durch eiξxj weiter fur den Verstarkungs-faktor G der Fouriermode
e−iωτ =∑
i
Gjieiξ(xi−xj) =: G(ξ) (4.20)
(Die Abhangigkeit von j verschwindet in dem betrachteten Fall aufgrund derPeriodizitat des Rechengebiets). Es folgt
ω = ωr + iωi = i1
τln G = −1
τarg(G) + i
1
τln |G| , (4.21)
wobei arg(eiφ) = φ bedeutet. Mittels der Dispersionsbeziehung (4.15) ist dieexakte Phasengeschwindigkeit gegeben durch
cph :=ω
ξ= a , (4.22)
die Phasengeschwindigkeit der numerischen Approximation durch
cph :=ωr
ξ. (4.23)
29. November 2007
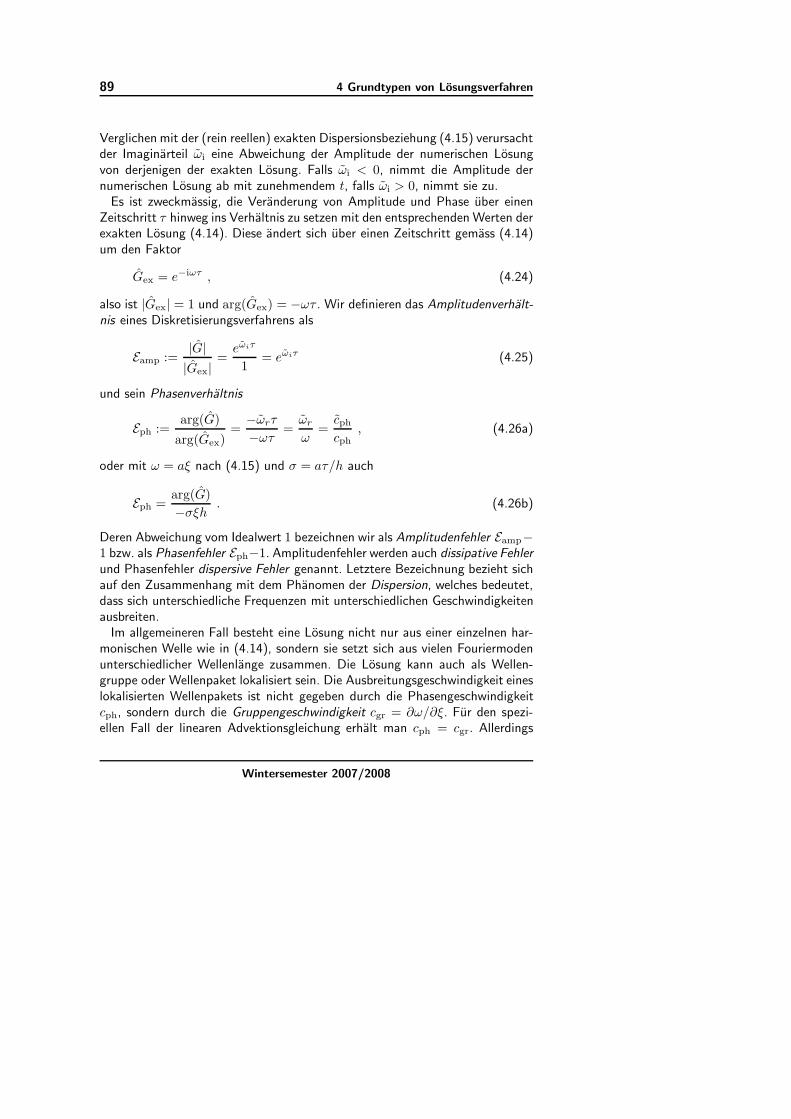
89 4 Grundtypen von Losungsverfahren
Verglichen mit der (rein reellen) exakten Dispersionsbeziehung (4.15) verursachtder Imaginarteil ωi eine Abweichung der Amplitude der numerischen Losungvon derjenigen der exakten Losung. Falls ωi < 0, nimmt die Amplitude dernumerischen Losung ab mit zunehmendem t, falls ωi > 0, nimmt sie zu.
Es ist zweckmassig, die Veranderung von Amplitude und Phase uber einenZeitschritt τ hinweg ins Verhaltnis zu setzen mit den entsprechenden Werten derexakten Losung (4.14). Diese andert sich uber einen Zeitschritt gemass (4.14)um den Faktor
Gex = e−iωτ , (4.24)
also ist |Gex| = 1 und arg(Gex) = −ωτ . Wir definieren das Amplitudenverhalt-nis eines Diskretisierungsverfahrens als
Eamp :=|G||Gex|
=eωiτ
1= eωiτ (4.25)
und sein Phasenverhaltnis
Eph :=arg(G)
arg(Gex)=
−ωrτ
−ωτ =ωr
ω=cph
cph, (4.26a)
oder mit ω = aξ nach (4.15) und σ = aτ/h auch
Eph =arg(G)
−σξh . (4.26b)
Deren Abweichung vom Idealwert 1 bezeichnen wir als Amplitudenfehler Eamp−1 bzw. als Phasenfehler Eph−1. Amplitudenfehler werden auch dissipative Fehlerund Phasenfehler dispersive Fehler genannt. Letztere Bezeichnung bezieht sichauf den Zusammenhang mit dem Phanomen der Dispersion, welches bedeutet,dass sich unterschiedliche Frequenzen mit unterschiedlichen Geschwindigkeitenausbreiten.
Im allgemeineren Fall besteht eine Losung nicht nur aus einer einzelnen har-monischen Welle wie in (4.14), sondern sie setzt sich aus vielen Fouriermodenunterschiedlicher Wellenlange zusammen. Die Losung kann auch als Wellen-gruppe oder Wellenpaket lokalisiert sein. Die Ausbreitungsgeschwindigkeit eineslokalisierten Wellenpakets ist nicht gegeben durch die Phasengeschwindigkeitcph, sondern durch die Gruppengeschwindigkeit cgr = ∂ω/∂ξ. Fur den spezi-ellen Fall der linearen Advektionsgleichung erhalt man cph = cgr. Allerdings
Wintersemester 2007/2008
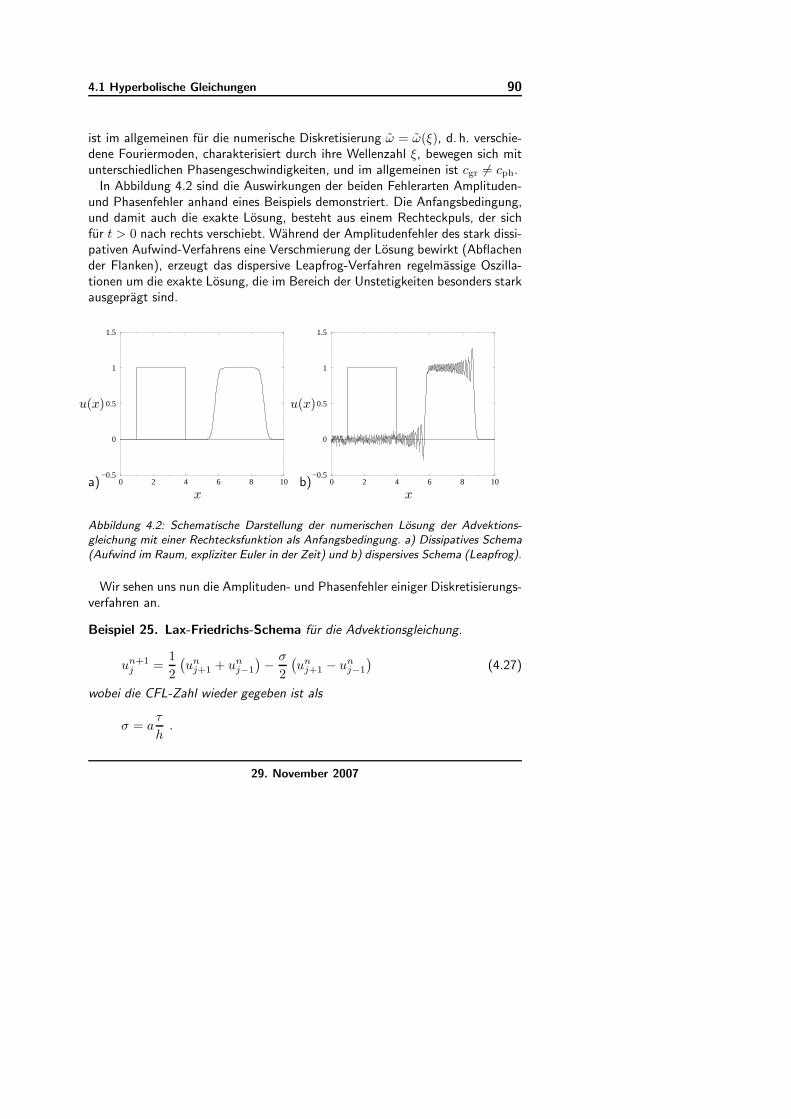
4.1 Hyperbolische Gleichungen 90
ist im allgemeinen fur die numerische Diskretisierung ω = ω(ξ), d. h. verschie-dene Fouriermoden, charakterisiert durch ihre Wellenzahl ξ, bewegen sich mitunterschiedlichen Phasengeschwindigkeiten, und im allgemeinen ist cgr 6= cph.
In Abbildung 4.2 sind die Auswirkungen der beiden Fehlerarten Amplituden-und Phasenfehler anhand eines Beispiels demonstriert. Die Anfangsbedingung,und damit auch die exakte Losung, besteht aus einem Rechteckpuls, der sichfur t > 0 nach rechts verschiebt. Wahrend der Amplitudenfehler des stark dissi-pativen Aufwind-Verfahrens eine Verschmierung der Losung bewirkt (Abflachender Flanken), erzeugt das dispersive Leapfrog-Verfahren regelmassige Oszilla-tionen um die exakte Losung, die im Bereich der Unstetigkeiten besonders starkausgepragt sind.
0 2 4 6 8 10−0.5
0
0.5
1
1.5
0 2 4 6 8 10−0.5
0
0.5
1
1.5
a) b)x x
u(x) u(x)
Abbildung 4.2: Schematische Darstellung der numerischen Losung der Advektions-gleichung mit einer Rechtecksfunktion als Anfangsbedingung. a) Dissipatives Schema(Aufwind im Raum, expliziter Euler in der Zeit) und b) dispersives Schema (Leapfrog).
Wir sehen uns nun die Amplituden- und Phasenfehler einiger Diskretisierungs-verfahren an.
Beispiel 25. Lax-Friedrichs-Schema fur die Advektionsgleichung.
un+1j =
1
2
(un
j+1 + unj−1
)− σ
2
(un
j+1 − unj−1
)(4.27)
wobei die CFL-Zahl wieder gegeben ist als
σ = aτ
h.
29. November 2007
91 4 Grundtypen von Losungsverfahren
Das Verfahren ist von der Ordnung O(τ, h2/∆t) und deshalb nur bedingt kon-sistent (vgl. Beispiel 15 in Kap. 3.5). Es ist stabil unter der Bedingung
|σ| ≤ 1 .
Dies ist bemerkenswert, da das Verfahren aus dem instabilen FTCS-Verfahren,Gl. (4.7), durch Ersetzen von un
j durch den Mittelwert der benachbarten Stutz-stellenwerte hervorgegangen ist. Der Verstarkungsfaktor der Diskretisierung ist
G(φ) = cosφ− iσ sinφ , φ = ξ∆x , 0 ≤ φ ≤ π .
Ausserdem erhalt man das Amplitudenverhaltnis
Eamp = |G| = | cos2 φ+ σ2 sin2 φ|1/2
und das Phasenverhaltnis
Eph =arctan(σ tanφ)
σφ.
Der Verlauf dieser Grossen ist in Abbildung 4.3 dargestellt. Fur kleine σ ist der
0.5 1 1.5 2 2.5 3
0.2
0.4
0.6
0.8
1
0.5 1 1.5 2 2.5 3
1
2
3
4
5
6
a) b)φ φ
EphEamp
σ = 0.25
σ = 1
σ = 0.25
σ = 1
Abbildung 4.3: a) Amplitudenverhaltnis Eamp und b) Phasenverhaltnis Eph fur dasLax-Friedrichs-Schema, fur σ = 0.25, 0.5, 0.75, 1. Die Abweichung vom Idealwert 1stellt den Amplitudenfehler bzw. Phasenfehler dar.
Amplitudenfehler, d. h. die Abweichung von Eamp vom Idealwert 1, betrachtlichgross (ausser fur φ → 0 oder π). Der Phasenfehler, d. h. die Abweichung vonEph vom Idealwert 1, ist (ausser fur φ → 0) fur kleinere σ ebenfalls erheblich.Da er positiv ist, lauft die berechnete Welle der exakten weit voraus.
Wintersemester 2007/2008
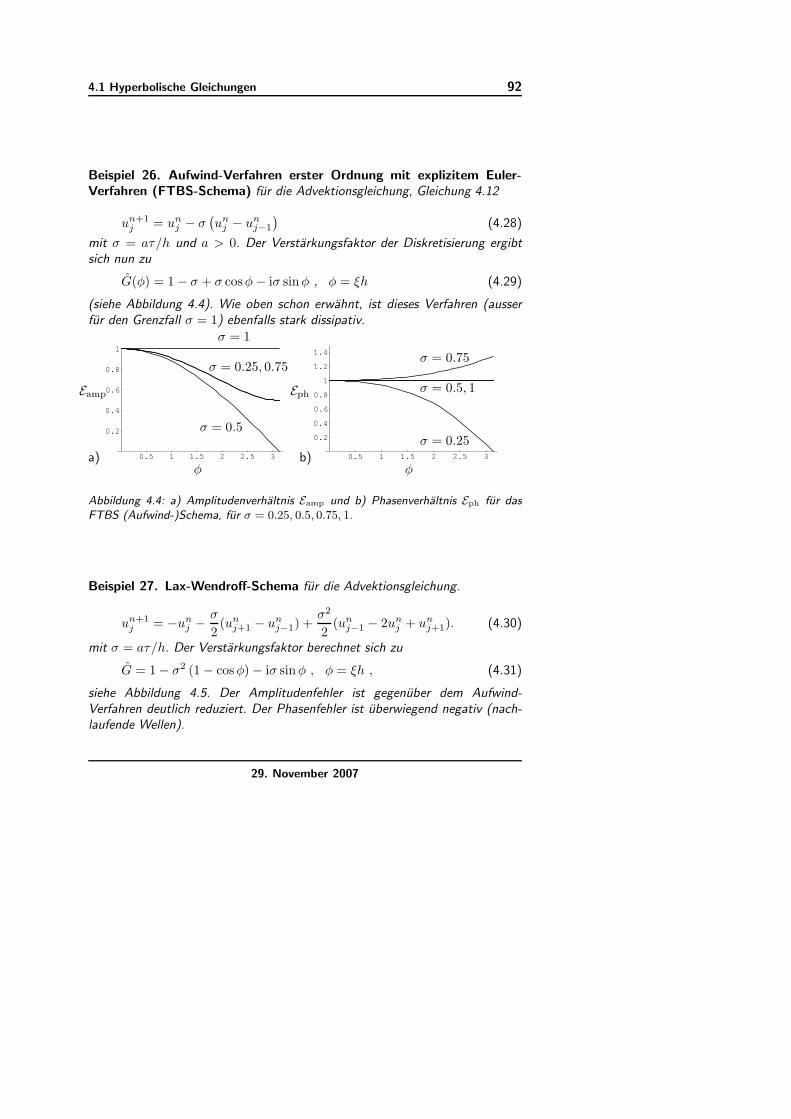
4.1 Hyperbolische Gleichungen 92
Beispiel 26. Aufwind-Verfahren erster Ordnung mit explizitem Euler-Verfahren (FTBS-Schema) fur die Advektionsgleichung, Gleichung 4.12
un+1j = un
j − σ(un
j − unj−1
)(4.28)
mit σ = aτ/h und a > 0. Der Verstarkungsfaktor der Diskretisierung ergibtsich nun zu
G(φ) = 1 − σ + σ cosφ− iσ sinφ , φ = ξh (4.29)
(siehe Abbildung 4.4). Wie oben schon erwahnt, ist dieses Verfahren (ausserfur den Grenzfall σ = 1) ebenfalls stark dissipativ.
0.5 1 1.5 2 2.5 3
0.2
0.4
0.6
0.8
1
0.5 1 1.5 2 2.5 3
0.2
0.4
0.6
0.8
1
1.2
1.4
a) b)φ φ
EphEamp
σ = 0.75
σ = 0.25
σ = 0.5, 1
σ = 0.25, 0.75
σ = 1
σ = 0.5
Abbildung 4.4: a) Amplitudenverhaltnis Eamp und b) Phasenverhaltnis Eph fur dasFTBS (Aufwind-)Schema, fur σ = 0.25, 0.5, 0.75, 1.
Beispiel 27. Lax-Wendroff-Schema fur die Advektionsgleichung.
un+1j = −un
j − σ
2(un
j+1 − unj−1) +
σ2
2(un
j−1 − 2unj + un
j+1). (4.30)
mit σ = aτ/h. Der Verstarkungsfaktor berechnet sich zu
G = 1 − σ2 (1 − cosφ) − iσ sinφ , φ = ξh , (4.31)
siehe Abbildung 4.5. Der Amplitudenfehler ist gegenuber dem Aufwind-Verfahren deutlich reduziert. Der Phasenfehler ist uberwiegend negativ (nach-laufende Wellen).
29. November 2007
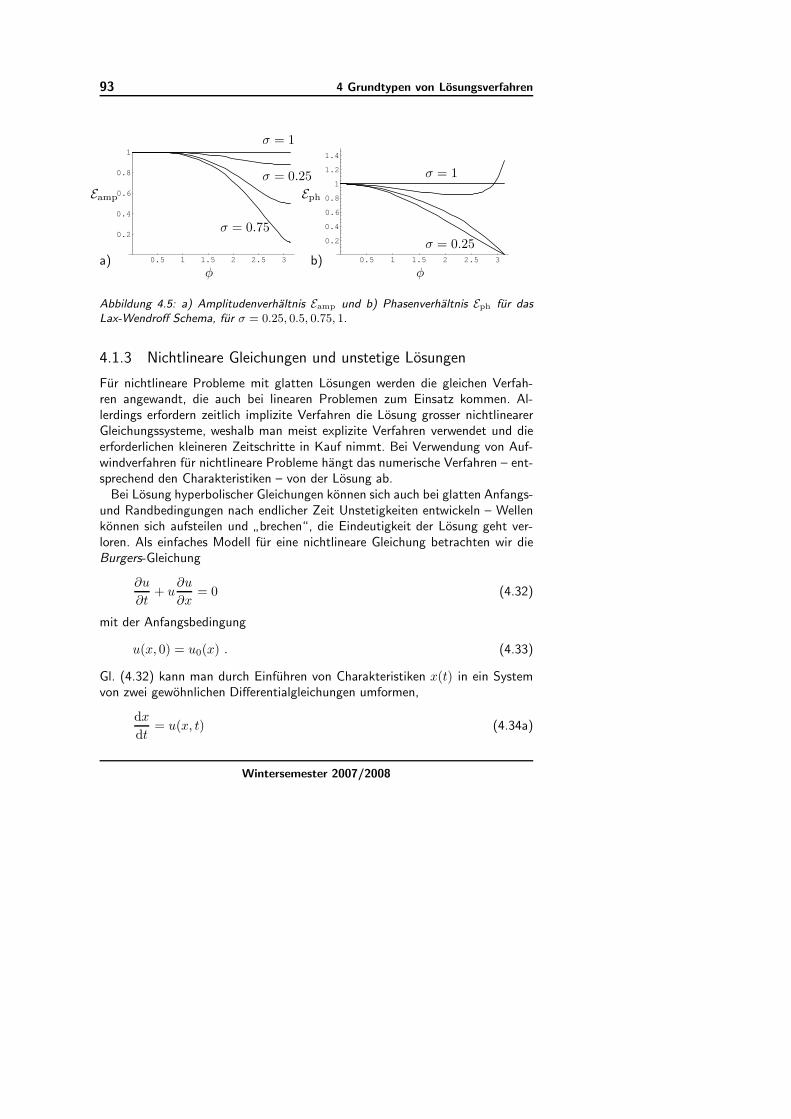
93 4 Grundtypen von Losungsverfahren
0.5 1 1.5 2 2.5 3
0.2
0.4
0.6
0.8
1
0.5 1 1.5 2 2.5 3
0.2
0.4
0.6
0.8
1
1.2
1.4
a) b)φ φ
EphEamp
σ = 1
σ = 0.25
σ = 0.25
σ = 0.75
σ = 1
Abbildung 4.5: a) Amplitudenverhaltnis Eamp und b) Phasenverhaltnis Eph fur dasLax-Wendroff Schema, fur σ = 0.25, 0.5, 0.75, 1.
4.1.3 Nichtlineare Gleichungen und unstetige Losungen
Fur nichtlineare Probleme mit glatten Losungen werden die gleichen Verfah-ren angewandt, die auch bei linearen Problemen zum Einsatz kommen. Al-lerdings erfordern zeitlich implizite Verfahren die Losung grosser nichtlinearerGleichungssysteme, weshalb man meist explizite Verfahren verwendet und dieerforderlichen kleineren Zeitschritte in Kauf nimmt. Bei Verwendung von Auf-windverfahren fur nichtlineare Probleme hangt das numerische Verfahren – ent-sprechend den Charakteristiken – von der Losung ab.
Bei Losung hyperbolischer Gleichungen konnen sich auch bei glatten Anfangs-und Randbedingungen nach endlicher Zeit Unstetigkeiten entwickeln – Wellenkonnen sich aufsteilen und
”brechen“, die Eindeutigkeit der Losung geht ver-
loren. Als einfaches Modell fur eine nichtlineare Gleichung betrachten wir dieBurgers-Gleichung
∂u
∂t+ u
∂u
∂x= 0 (4.32)
mit der Anfangsbedingung
u(x, 0) = u0(x) . (4.33)
Gl. (4.32) kann man durch Einfuhren von Charakteristiken x(t) in ein Systemvon zwei gewohnlichen Differentialgleichungen umformen,
dx
dt= u(x, t) (4.34a)
Wintersemester 2007/2008

4.1 Hyperbolische Gleichungen 94
du
dt=∂u
∂t+
dx
dt
∂u
∂x= 0 . (4.34b)
Gleichung (4.34a) beschreibt die Charakteristiken x(t) von (4.32) und (4.34b)die Anderung von u(x(t), t) entlang dieser Charakteristiken, welche notwendi-gerweise verschwindet, wie schon in Kapitel 2.5.3.4 allgemein gezeigt. Folglichsind nach (2.57) die Charakteristiken Geraden der Form x(t) = x + u0(x) · t.Auch wenn die Anfangsbedingung u0(x) glatt ist, aber irgendwo ∂u0(x)/∂x =u′0(x) < 0, bildet sich nach endlicher Zeit eine Unstetigkeit aus (vgl. Abbil-dung 2.7 im Kapitel 2.5.3). Zum Beweis betrachte man zwei Charakteristiken
x1(t) = x1 + u0(x1)t , x2(t) = x2 + u0(x2)t , (4.35)
worin x1 und x2 die x-Achsenabschnitte der Charakteristiken zum Zeitpunktt = 0 sind. Fordert man nun x1 = x2 und setzt x1 =barx und x2 = x+ dx, so erhalt man fur den Zeitpunkt des Schneidens
t = −(u0(x+ dx) − u0(x)
dx
)−1
. (4.36)
Fuhrt man nun den Grenzubergang dx → 0 durch, so erhalt man fur denZeitpunkt t, zu dem sich die beiden unmittelbar benachbarten Charakteristikenkreuzen,
t = − 1
u′0(x)(4.37)
und damit den Zeitpunkt, zu dem das erste Uberkreuzen von Charakteristikenauf dem betrachteten Intervall auftreten kann,
Tb = − 1
minx u′0(x). (4.38)
Da die Losung entlang jeder Charakteristik konstant ist, i.a. aber von Charak-teristik zu Charakteristik variiert, wird sie im Schnittpunkt mehrdeutig (Singu-laritat).
Die Geschwindigkeit s, mit der sich eine Unstetigkeit
u(x, t) =
ul , x < stur , x > st
(4.39)
29. November 2007
95 4 Grundtypen von Losungsverfahren
mit ul > ur ausbreitet, kann man wie folgt berechnen. Man integriert Glei-chung (4.32) uber ein Intervall [−xm, xm], das die Unstetigkeit enthalt
d
dt
∫ xm
−xm
u(x, t)dx =1
2(u2
l − u2r) =
1
2(ul + ur)(ul − ur) . (4.40)
Fur die Losung (4.39) gilt aber auch
∫ xm
−xm
u(x, t)dx = (xm + st)ul + (xm − st)ur , (4.41)
woraus man erhalt
d
dt
∫ xm
−xm
u(x, t)dx =d
dtxm(ul+ur)+
d
dt(st(ul − ur)) = s(ul−ur) . (4.42)
Aus dem Vergleich von (4.40) und (4.42) ergibt sich fur die Ausbreitungsge-schwindigkeit
s =1
2(ul + ur) . (4.43)
Dies ist die Rankine-Hugoniot-Bedingung fur die Burgers-Gleichung. Da dieLosung u(x, t) auf den Charakteristiken konstant ist, konnen sich Unstetigkeitennur entlang von ihnen bzw. ihren Schnittpunkten ausbreiten.
Fur eine weitergehende Diskussion und die numerische Behandlung allgemei-ner nichtlinearer skalarer hyperbolischer Probleme und von Systemen sei auf[LeV92, LeV02] verwiesen. Falls Unstetigkeiten in der Losung auftreten, wieetwa in kompressiblen Stromungen mit Verdichtungsstossen, mussen diese spe-ziell behandelt werden, um genaue und oszillationsfreie Losungen zu erhalten.Hierfur kommen z. B. TVD-Verfahren (total variation diminishing) oder ENO-Verfahren (essentially non-oscillatory) zum Einsatz. Zur Thematik dieser stos-sauflosenden Verfahren (shock-capturing methods) existiert eine umfangreicheLiteratur ([TAP97, Hir90, LeV92, LeV02]).
4.2 Elliptische Gleichungen
Fur elliptische Differentialgleichungen wird an jedem Randpunkt eine Rand-bedingung (Dirichlet, Neumann oder Robin) vorgegeben, um ein sachgemass
Wintersemester 2007/2008
4.2 Elliptische Gleichungen 96
gestelltes Problem zu formulieren, siehe Kapitel 2.5.1. Elliptische Probleme tre-ten z.B. auf bei der Berechnung von Potentialstromungen, bei der Berechnungdes Drucks in inkompressiblen Stromungen, und insbesondere bei der implizitenZeitintegration von parabolischen Gleichungen. Fur die letztere Aufgabe ist dieEffizienz des in jedem Zeitschritt eingesetzten elliptischen Losungsverfahrensvon besonderer Bedeutung.
Als wichtiges Standard-Beispiel soll im folgenden die Poisson-Gleichung inzwei Dimensionen
∆φ ≡ ∂2φ
∂x2+∂2φ
∂y2= f (4.44)
betrachtet werden. Diskretisiert man die Poisson-Gleichung (4.44) auf einemrechteckigen Gebiet mit zentralen Differenzen 2. Ordnung, so erhalt man furdie diskrete Losung φj,k bei einer aquidistanten Stutzstellenverteilung mith = ∆y = h die Gleichung (5-Punkte-Formel, Differenzenstern) das Glei-chungssystem
(φj+1,k − 2φj,k + φj−1,k) + (φj,k+1 − 2φj,k + φj,k−1) = h2 · fj,k (4.45)
mit j = 1, ..., N und k = 1, ...,M . Wenn man die diskrete Losung φj,k und dieInhomogenitat h2 fj,k als eindimensionale Vektoren anordnet, so erhalt man einlineares Gleichungssystem mit Dimension NM ×NM der Form
Aφ = b , (4.46)
das fur φ gelost werden muss. Dabei besteht der Vektor φ aus den Losungenan den einzelnen Punkten,
φ = (φ1,1, . . . , φ1,M︸ ︷︷ ︸M
, φ2,1, . . . , φ2,M︸ ︷︷ ︸M
, . . . , φN,1, . . . , φN,M︸ ︷︷ ︸M
)T . (4.47)
Ausgeschrieben hat das Gleichungssystem fur die Punkte im Innern des Re-chengebiets die Form
. . .. . .
. . .. . .
. . .. . .
. . .. . .
1 1 −4 1 1. . .
. . .. . .
. . .. . .
. . .. . .
. . .
φ1,1
...φj,k
...φN,M
= h2
...
...fj,k
...
...
.
29. November 2007
97 4 Grundtypen von Losungsverfahren
(4.48)
Die diskretisierten Randbedingungen sind zusatzlich in das Gleichungssystemeinzutragen. Die Koeffizientenmatrix ist also nur dunn besetzt und hat einespezielle Gestalt, die zur Konstruktion effizienter Losungsverfahren ausgenutztwerden kann. Zur Losung konnen direkte oder iterative Verfahren verwendetwerden.
Direkte Verfahren fur eine vollbesetzte Matrix sind bei mehrdimensionalenProblemen im allgemeinen zu aufwendig; die LU-Zerlegung/Gauss-Eliminationeiner allgemeinen Matrix mit anschliessender Berechnung eines Losungsvektorsbenotigt O
((MN)3
)Fliesskomma-Operationen (zum Vergleich: Die Losung
eines tridiagonalen Gleichungssystems der Dimension NM × NM mit demThomas-Algorithmus benotigt nur O(NM) Operationen).
Es wurden jedoch einige spezielle direkte Verfahren entwickelt, die auf dieStruktur des Gleichungssystems (4.45) zugeschnitten sind und dadurch sehreffizient werden (schnelle elliptische Loser, Fast Poisson Solvers). Beispiele sinddas Verfahren nach Hockney oder die zyklische Reduktion/rekursive Zerlegung.Dabei gilt, dass diese direkten Methoden in endlich vielen Schritten auf dieexakte Losung des Gleichungssystems fuhren [Wes01].
4.2.1 Iterative Verfahren
Im allgemeinen ist man zur Losung der diskretisierten Poisson-Gleichung, vonder Gleichung (4.45) einen wichtigen Spezialfall darstellt, auf iterative Ver-fahren angewiesen. Iterative Verfahren zur Losung eines linearen Gleichungs-systems (4.46) werden im folgenden behandelt, wobei A zunachst eine allge-meine Matrix ist. Die Spezialisierung auf die besondere Form des Gleichungs-systems (4.45) wird dann ebenfalls jeweils angegeben.
Ausgangspunkt der iterativen Verfahren ist eine Zerlegung der Koeffizienten-matrix A in zwei Matrizen N und P
A = N − P , (4.49)
wobei die Matrix N so gewahlt werden sollte, dass sie”einfach zu invertieren“
ist. Das lineare Gleichungssystem kann damit umgeschrieben werden als
N φ = P φ + b . (4.50)
Hieraus wird das folgende Iterationsschema abgeleitet:
N φ(m+1) = P φ(m) + b (4.51)
Wintersemester 2007/2008

4.2 Elliptische Gleichungen 98
bzw.
φ(m+1) = N−1 P φ(m) + N−1 b . (4.52)
Zur Bewertung der Genauigkeit der Iterationslosung φ(m) kann ihr Residuum
R(m) betrachtet werden. Das Residuum ist der Fehler, der sich beim Einsetzender aktuellen Losung φ(m) in das Gleichungssystem ergibt,
R(m) := Aφ(m) − b , (4.53)
was mit (4.49) und (4.50) auch geschrieben werden kann als
R(m) = N (φ(m) − φ(m+1) ) = A(φ(m) − φ) = A ε(m) . (4.54)
Voraussetzung fur die Konvergenz des Iterationsverfahrens ist, dass der Fehlerε(m) = φ(m) − φ mit zunehmendem m gegen Null geht. Es gilt nach Glei-chung (4.51) und (4.52)
ε(m+1) = φ(m+1)−φ = G φ(m) +N−1b−G φ−N−1b = Gm+1ε(0). (4.55)
Daraus erkennt man, dass die Potenzen der Iterationsmatrix G = N−1P ent-scheidend sind fur die Konvergenz der Iterationsvorschrift (man vergleiche denBegriff der M-Stabilitat im Kapitel 3.5.2.3). Eine notwendige und hinreichendeBedingung ist dadurch gegeben, dass der Spektralradius der Matrix G kleinerals eins ist, d. h. dass gilt
ρ(G) = maxi
( |λi(G)| ) < 1 mit G = N−1P . (4.56)
Wichtige Iterationsverfahren
Nomenklatur: D Matrix der Diagonalelemente von A
L linke untere Dreiecksmatrix von A
U rechte obere Dreiecksmatrix von A
A = L+D + U
29. November 2007

99 4 Grundtypen von Losungsverfahren
• Jacobi-VerfahrenBeim Jacobi-Verfahren wird als Matrix N die Diagonalmatrix D gewahlt:
N = D , P = −(L + U) . (4.57)
Die Iterationsvorschrift des Jacobi-Verfahrens lautet dementsprechend
φ(m+1)i = ( bi −
∑
j 6=i
Aij φ(m)j ) /Aii . (4.58)
Fur das Beispiel der mit finiten Differenzen diskretisierten Poisson-Gleichung (4.45) nimmt das Jacobi-Verfahren die folgende Form an
φ(m+1)j,k =
1
4
(φ
(m)j,k+1 + φ
(m)j,k−1 + φ
(m)j+1,k + φ
(m)j−1,k − h2 fj,k
). (4.59)
Der Spektralradius des Jacobi-Verfahrens fur Gleichung (4.59) ist [Moi01]
ρ(GJ) =
1
2
(cos
π
M+ cos
π
N
)≈ 1 − π2
4
(1
M2+
1
N2
). (4.60)
Er ist kleiner als eins, so dass das Verfahren konvergiert, aber die Kon-vergenz ist fur grosse M und N sehr langsam.
• Gauss-Seidel-VerfahrenBeim Gauss-Seidel-Verfahren wird fur die Matrizen N und P gewahlt:
N = D + L , P = −U . (4.61)
Die Iterationsvorschrift des Gauss-Seidel-Verfahrens lautet also
φ(m+1)i = ( bi −
i−1∑
j=1
Aij φ(m+1)j −
N∑
j=i+1
Aij φ(m)j ) /Aii . (4.62)
Die bereits bekannten Werte der neuen Iterationsstufe m+1 werden alsosofort verwendet. Dies lasst eine raschere Konvergenz erwarten, was auchtatsachlich zutrifft. Fur die diskretisierte Poisson-Gleichung (4.45) erhaltman das Iterationsschema
φ(m+1)j,k =
1
4
(φ
(m)j,k+1 + φ
(m+1)j,k−1 + φ
(m)j+1,k + φ
(m+1)j−1,k − h2 fj,k
). (4.63)
Wintersemester 2007/2008

4.2 Elliptische Gleichungen 100
Der Spektralradius des Gauss-Seidel-Verfahrens nach (4.63) ist [Moi01]
ρ(GGS
) =(ρ(G
J))2
=1
4
(cos
π
M+ cos
π
N
)2
≈ 1− π2
2
(1
M2+
1
N2
),
(4.64)
so dass die Konvergenz doppelt so schnell ist wie beim Jacobi-Verfahren.
Wie am Beispiel von Gleichungen (4.60) und (4.64) gezeigt, ist der Spek-tralradius ρ der Iterationsmatrix ublicherweise nur wenig kleiner als 1. Da-her ist die Konvergenzgeschwindigkeit nach Gleichung (4.55) nicht sehrhoch und sie verschlechtert sich stark mit Verfeinerung des Gitters (wach-sende M , N).
Beispiel 28. Es soll mittels des Jacobi- respektive des Gauss-Seidel-Verfahrens der Iterationsfehler ε um einen Faktor 10k reduziert werden,d. h.
‖ε‖ = ‖φ− φ(m)‖ ≤ ρ(G)m‖ε(0)‖ ≤ 10−k‖ε(0)‖. (4.65)
Es ist also ρ(G)m ≤ 10−k und mit Gl. (4.60) und (4.64) fur M ∝ N
m ∝ kN2. (4.66)
Daraus folgt, dass die Konvergenzgeschwindigkeit des Jacobi- und Gauss-Seidel-Verfahrens umso kleiner ist (d.h. es sind umso mehr Iterationennotwendig), je feiner die Diskretisierung gewahlt wird.
• Iterationsverfahren mit Uberrelaxation (Successive Over-Relaxation, SOR)
Beim SOR-Verfahren wird φ(m+1)i als gewichtete Summe von φ
(m)i und
dem Wert φ(m+1)i,GS des Gauss-Seidel-Verfahrens berechnet:
φ(m+1)i = ω φ
(m+1)i,GS + (1 − ω)φ
(m)i . (4.67)
Der Parameter ω wird als Relaxationsfaktor bezeichnet und wird da-zu verwendet, den Spektralradius zu minimieren. Notwendige Bedin-gung fur die Konvergenz ist 0 < ω < 2. Der optimale Wert fur ω istauflosungsabhangig und wird in der Regel im Bereich 1.7-1.9 gewahlt
29. November 2007

101 4 Grundtypen von Losungsverfahren
[Moi01]. Fur den Fall N = M erhalt man bei optimalem Wert vonω = ωopt = 2/(1 + sinπ/N) fur den Spektralradius
ρ(GSOR,opt
) = ωopt − 1 =1 − sinπ/N
1 + sinπ/N≈ 1 − 2π
N, (4.68)
also eine erhebliche Verbesserung gegenuber (4.64). Fur die Matrizen Nund P gilt
N =1
ωD + L , P =
1 − ω
ωD − U . (4.69)
Die Iterationsvorschrift des SOR-Verfahrens lautet deshalb
φ(m+1)i = ω(bi −
i−1∑
j=1
Aijφ(m+1)j −
N∑
j=i+1
Aijφ(m)j ) /Aii + (1 − ω)φ
(m)i .
Lost man die diskretisierte Poisson-Gleichung (4.45) gemass dem SOR-Verfahren, so erhalt man das Iterationsschema
φ(m+1)j,k =
1
4ω(φ
(m)j,k+1 + φ
(m+1)j,k−1 + φ
(m)j+1,k + φ
(m+1)j−1,k − h2 fj,k
)
+(1 − ω)φ(m)j,k . (4.70)
• Verfahren der konjugierten Gradienten (Conjugate Gradient Me-thod)Fur symmetrische, positiv definite Matrizen A, also wenn gilt
A = AT und φTAφ > 0 fur alle φ 6= 0 ,
kann das Konjugierte-Gradienten-Verfahren unmittelbar angewendet wer-den. Nicht symmetrische Matrizen konnen symmetrisiert werden, wodurchjedoch die Konvergenzeigenschaften (Konditionszahl κ = |λmax|/|λmin|,siehe Kapitel 4.2.2) verschlechtert werden
Aφ = b −→(ATA
)φ = AT b , κ(ATA) = κ(A)2. (4.71)
Das Konjugierte-Gradienten-Verfahren ist (zusammen mit einer geeigne-ten Vorkonditionierung) extrem effizient. Es kann gezeigt werden, dassdas Verfahren mit einer endlichen Anzahl von Iterationsschritten zur ex-akten Losung konvergiert. Das Gleichungssystem Aφ = b wird nach demfolgenden Algorithmus gelost
Wintersemester 2007/2008

4.2 Elliptische Gleichungen 102
m = 0 ; φ(0) = 0 ; r(0) = b
while r(m) 6= 0
m = m+ 1
if m = 1
ψ(1) = r(0)
else
β = (r(m−1))T r(m−1)/(r(m−2))T r(m−2)
ψ(m) = r(m−1) + βψ(m−1)
end
α = (r(m−1))T r(m−1)/(ψ(m))T Aψ(m)
φ(m) = φ(m−1) + αψ(m)
r(m) = r(m−1) − αAψ(m)
end
φ = φ(m).
• Weitere IterationsverfahrenIn der Praxis werden zahlreiche weitere Iterationsverfahren angewendet[Hir90, Wes01, Fle91]. Einige Beispiele seien hier erwahnt:
1. LinieniterationFur die Linieniteration wird eine Raumrichtung ausgezeichnet, z. B.j = const. Entlang dieser Linie werden die neuen Iterationswertedurch simultane direkte (implizite) Berechnung bestimmt. Die Er-fahrung zeigt, dass diese Verfahren doppelt so schnell konvergierenwie das Gauss-Seidel-Verfahren. Die Auswahl der Linienrichtung ge-schieht nach den Eigenschaften der Losung, z. B. in wandnormalerRichtung fur die Berechnung von Grenzschichten.
2. ADI-Verfahren (alternating direction implicit)Das ADI-Verfahren ist eng verknupft mit der Linieniteration:Wahrend bei der Linieniteration die Vorzugsrichtung fest bleibt,wird beim ADI-Verfahren in aufeinanderfolgenden Iterationsschrit-ten die Richtung abgewechselt. Die Konvergenzgeschwindigkeit wirddadurch ebenfalls verbessert.
3. SLOR (successive line over-relaxation) Das SLOR-Verfahren bestehtaus einer Kombination des SOR-Verfahrens mit der Linieniteration.
29. November 2007
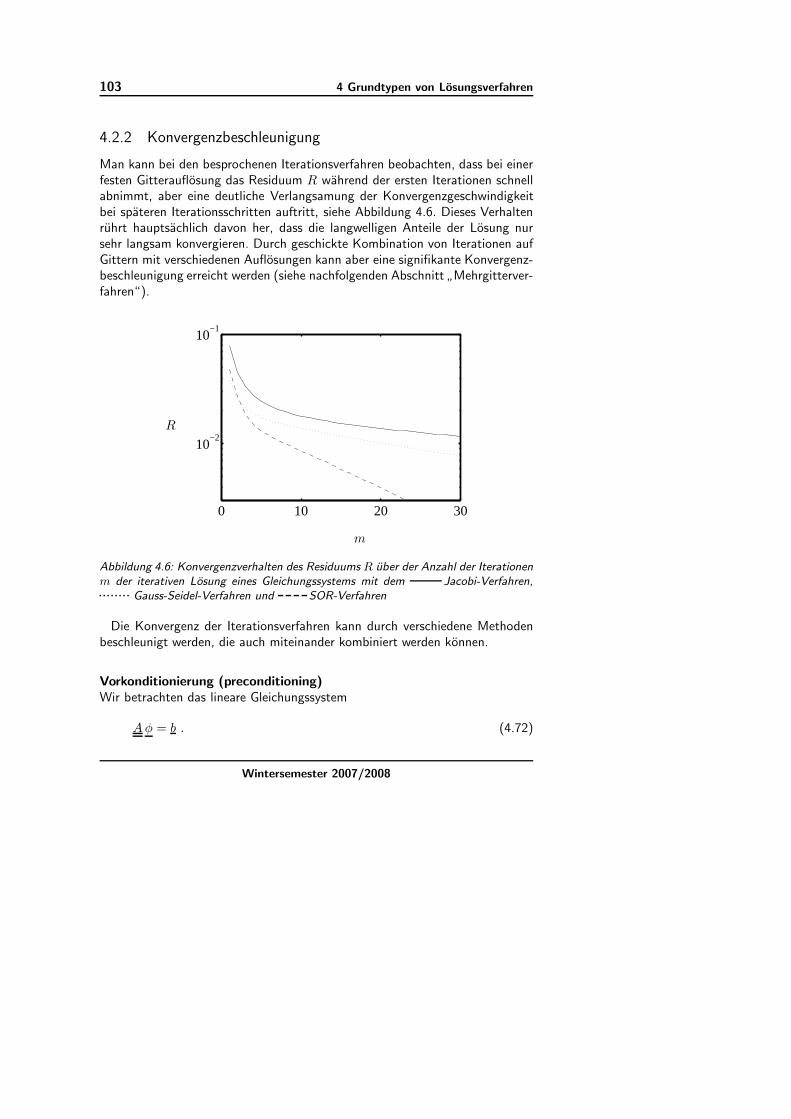
103 4 Grundtypen von Losungsverfahren
4.2.2 Konvergenzbeschleunigung
Man kann bei den besprochenen Iterationsverfahren beobachten, dass bei einerfesten Gitterauflosung das Residuum R wahrend der ersten Iterationen schnellabnimmt, aber eine deutliche Verlangsamung der Konvergenzgeschwindigkeitbei spateren Iterationsschritten auftritt, siehe Abbildung 4.6. Dieses Verhaltenruhrt hauptsachlich davon her, dass die langwelligen Anteile der Losung nursehr langsam konvergieren. Durch geschickte Kombination von Iterationen aufGittern mit verschiedenen Auflosungen kann aber eine signifikante Konvergenz-beschleunigung erreicht werden (siehe nachfolgenden Abschnitt
”Mehrgitterver-
fahren“).
0 10 20 30
10−2
10−1
m
R
Abbildung 4.6: Konvergenzverhalten des Residuums R uber der Anzahl der Iterationenm der iterativen Losung eines Gleichungssystems mit dem Jacobi-Verfahren,
Gauss-Seidel-Verfahren und SOR-Verfahren
Die Konvergenz der Iterationsverfahren kann durch verschiedene Methodenbeschleunigt werden, die auch miteinander kombiniert werden konnen.
Vorkonditionierung (preconditioning)Wir betrachten das lineare Gleichungssystem
Aφ = b . (4.72)
Wintersemester 2007/2008

4.2 Elliptische Gleichungen 104
Die Konvergenz der verschiedenen Iterationsverfahren hangt wesentlich von derKonditionszahl κ der Matrix A ab. Die Konditionszahl ist definiert durch
κ(A) :=|λmax||λmin|
≥ 1 ,
wobei |λmax| der betragsmassig maximale Eigenwert und |λmin| der be-tragsmassig minimale Eigenwert von A ist. Fur κ → 1 wird ein optimalesKonvergenzverhalten erreicht. Um die Konditionszahl einer Matrix zu verbes-sern, kann man mit Hilfe einer nicht singularen Matrix C vom System (4.72)auf ein transformiertes System
(C A)φ = C b
ubergehen. Die Matrix C ist dabei moglichst so zu wahlen, dass
κ(C A) ≪ κ(A)
gilt. Beispiele fur die Vorkonditionierungsmatrix C sind
1. die Inverse der Diagonalen von A,
Ci,j :=
1/Ai,j , i = j
0 , sonst
(jede Zeile wird durch ihr Diagonalelement dividiert),
2. die Inverse der Zeilensummen von A (Aquilibrieren, ergibt optimale Kon-ditionszahl),
Ci,j :=
(∑
k
|Ai,k|)−1
δij .
Mehrgitterverfahren (multigrid methods)Kurzwellige Anteile des Fehlers ε werden durch die Iterationen relativ schnellreduziert (Dampfung). Die Konvergenz der Iterationsverfahren wird jedoch oftdurch niederfrequente Storungen, die auf feinen Gittern nur langsam abklingen,beeintrachtigt. Man kann durch geschickte Verwendung mehrerer geschach-telter Gitter unterschiedlicher Feinheit dieses Problem stark abmildern. Beim
29. November 2007

105 4 Grundtypen von Losungsverfahren
Mehrgitterverfahren fuhrt man auf dem feinsten Gitter einige Iterationsschrittedurch (Relaxation) und geht dann auf ein nachstgroberes Gitter uber (Restrikti-on). Auf diesem groberen Gitter werden dann mit den interpolierten Daten desfeineren Gitters als Startlosung einige Iterationsschritte durchgefuhrt. Danacherfolgt wiederum eine Restriktion auf ein noch groberes Gitter mit anschlies-sender Relaxation. Der Vorgang wird bis zur Restriktion auf das grobste Gitterwiederholt, auf dem dann das Gleichungssystem direkt oder iterativ gelost wird.Die Losung auf dem grobsten Gitter wird dann auf das nachst feinere Gitter in-terpoliert (Prolongation) und als Startlosung fur die Relaxation auf dem feinerenGitter benutzt. Dieser Vorgang wird bis zur Relaxation auf dem feinsten Gitterdurchgefuhrt. Das Vorgehen mit dieser Gitteranordnung heisst
”V-Zyklus“.
Es gibt viele verschieden Varianten des oben dargestellten Verfahrens. Sokann man z. B. nach einer Restriktion und Relaxation auf dem groberen Gittereinen Prolongationsschritt mit anschliessender Relaxation auf ein feineres Gitterfolgen (
”W-Zyklus“) lassen. Eine weitere Variante besteht darin, dass man mit
der Relaxation auf dem grobsten Gitter startet und dann auf jeweils feinereGitter ubergeht.
In der Praxis sind Mehrgitterverfahren weit verbreitet, weil mit ihnen eine sehrhohe Konvergenzbeschleunigung erreicht werden kann [Wes92, Hir90]. Geradefur Anwendungen in der Fluiddynamik sind die damit verbundenen Effizienz-steigerungen essentiell. Es ist jedoch zu beachten, dass die dazugehorendenAlgorithmen schwierig zu implementieren sind [Moi01].
4.3 Parabolische Gleichungen
Die Grundlagen der parabolischen Gleichungen, z. B. die Diffusionsgleichungund die Warmeleitungsgleichung, wurden bereits im Kapitel 2.5.2 besprochen.Fur ein sachgemass gestelltes (well-posed) parabolisches Problem sind Anfangs-und Randbedingungen erforderlich. Ein fur die Fluiddynamik wichtiges Beispielparabolischer Gleichungen sind die Grenzschichtgleichungen. Eine ausfuhrlicheDarstellung von Grenzschichtberechnungen gibt das Buch [CC99].
Es ist aufschlussreich, zunachst eine Semidiskretisierung einer parabolischenGleichung zu betrachten. Dabei bleibt die Zeitkoordinate noch kontinuierlich,und die raumliche Diskretisierung liefert ein System gewohnlicher Differential-gleichungen (Linienmethode, vgl. Kapitel 3.5.3.4).
Wintersemester 2007/2008
4.3 Parabolische Gleichungen 106
Beispiel 29. Als Beispiel soll die homogene eindimensionale Diffusionsgleichung
∂u
∂t= ν
∂2u
∂x2(4.73)
auf einem periodischen Gebiet 0 ≤ x ≤ L betrachtet werden. Als Semidiskre-tisierung mit zentralen Differenzen 2. Ordnung in x mit Schrittweite h = L/Nerhalt man das System gewohnlicher Differentialgleichungen fur die Funktionenuj(t) ≈ u(xj , t)
duj
dt=
ν
h2(uj+1 − 2uj + uj−1) . (4.74)
Wir fuhren den Fourieransatz
uj(t) = uk(t)eikαxj (4.75)
und die Bezeichnungen α = 2π/L, ξk = kα,
ξ′k = kαh = ξkh , k = 1, . . . , N/2 (4.76)
ein (es genugt, Werte k > 0 zu betrachten). Der Phasenwinkel ξ′k liegt inner-halb 0 ≤ ξ′k ≤ π. Durch Einsetzen von (4.75) in (4.74) kann das System aufDiagonalform gebracht werden,
duk
dt= − ν
∆x2(2 − 2 cos ξ′k) uk . (4.77)
Es folgt daraus
λk = −2ν
h2(1 − cos ξ′k) < 0 (4.78)
mit den Eigenwerten λk des diagonalen Systems. Fur ξ′k ≪ 1 gilt λk ≈ −νξ2k =−νk2α2. Die Losungen uk(t) von (4.77) sind offensichtlich
uk(t) = uk(0) · eλkt (4.79)
und klingen mit der Zeit exponentiell ab. Fur den betragsmassig maximalen undminimalen Eigenwert λk ergibt sich (k = N/2 bzw. k = 1)
|λmax| =4ν
∆x2=
4ν
L2N2 , |λmin| ≈
ν
h2
4π2
N2= ν
4π2
L2. (4.80)
29. November 2007

107 4 Grundtypen von Losungsverfahren
Man kann erkennen, dass das Verhaltnis
|λmax||λmin|
= O(N2) ≫ 1
ist. Das Differentialgleichungssystem (4.77) wird daher auch als steif bezeich-net, d. h. es sind in der Losung gemass (4.79) Anteile mit stark unterschied-lichem Dampfungsverhalten enthalten. Als Folge davon wird bei der Zeitinte-gration der Zeitschritt bestimmt durch die am starksten gedampften Anteile,wenn nicht spezielle Stabilitatseigenschaften des Zeitintegrationsschemas gege-ben sind (z. B. absolute Stabilitat).
Aufgrund der Uberlegungen aus Kapitel 3.5.2 muss fur eine stabile Zeitinte-gration z = λkτ fur alle k innerhalb des Stabilitatsgebiets S des Integrations-verfahrens liegen, also insbesondere
|λmax| τ ≤ Smax , (4.81)
wobei Smax die Stabilitatsgrenze auf der negativen reellen Achse bezeichnet.Daraus ergibt sich
τ ≤ Smax
|λmax|∝ h2 ∝ 1
N2. (4.82)
Der Zeitschritt ist daher τ = O(h2) fur bedingt stabile Verfahren mit endlicherStabilitatsgrenze Smax; die Zeitintegration wird daher sehr aufwendig fur h →0. (Vergleiche dazu die weniger restriktive CFL-Bedingung fur hyperbolischeGleichungen, τ = O(h)). Dies sei an dem folgenden Beispiel demonstriert.
Beispiel 30. Explizites Euler-VerfahrenAls Fortsetzung zu Beispiel 29 soll nun die Zeit ebenfalls diskretisiert werden,und zwar zunachst mit einem expliziten Euler-Verfahren, d. h. dem Schema
un+1j − un
j
τ= Lxxu
nj :=
ν
h2
(un
j+1 − 2unj + un
j−1
). (4.83)
Die Stabilitatsuntersuchung nach von Neumann ergibt mit unj = un
keikαxj
un+1k = un
k +ντ
∆x2(2 cos ξ′k − 2) un
k , ξ′k = kαh (4.84)
und daraus fur den Verstarkungsfaktor der Fouriermode k
∣∣∣Gk
∣∣∣ =
∣∣∣∣un+1
k
unk
∣∣∣∣ = 1 +2ντ
h2(cos ξ′k − 1) . (4.85)
Wintersemester 2007/2008

4.3 Parabolische Gleichungen 108
Fur Stabilitat wird sinnvollerweise (da die Losungsanteile zeitlich abklingen)gefordert, dass |Gk| ≤ 1 ist. Daraus folgt wegen | cosφ′k| ≤ 1 die Bedingung
β := ντ
h2≤ 1
2oder τ ≤ 1
2
h2
ν. (4.86)
Wie erwahnt ist die Stabilitatsbedingung τ ≤ O(h2) fur das explizite Verfahren.
Um die einschneidende quadratische Zeitschrittrestriktion (4.82) resp. (4.86)zu umgehen, verwendet man im Zusammenhang mit parabolischen Gleichungenhaufig Zeitintegrationsverfahren, welche absolut stabil sind, d. h. deren Stabi-litatsbereich S die linke Halbebene von C| umfasst. Als Beispiele hierfur sinddas implizite Euler-Verfahren und das Crank-Nicolson-Verfahren zu erwahnen.
Beispiel 31. Implizites Euler-VerfahrenMan erhalt mit dem impliziten Euler-Verfahren fur die Zeitdiskretisierung ausBeispiel 29
un+1j − un
j
τ= Lxxu
n+1j =
ν
h2
(un+1
j+1 − 2un+1j + un+1
j−1
)(4.87)
und als Verstarkungsfaktor
∣∣∣Gk
∣∣∣ =
∣∣∣∣un+1
k
unk
∣∣∣∣ =
∣∣∣∣1
1 + 2β (1 − cos ξ′k)
∣∣∣∣ ≤ 1 , k = 1, . . . , N/2 , (4.88)
da β > 0 und 1−cos ξ′k ≥ 0. Das implizite Euler-Verfahren fur Gleichung (4.74)ist unbedingt stabil.
Beispiel 32. Verallgemeinertes Crank-Nicolson-VerfahrenDie zeitliche Integration mit dem verallgemeinerten Crank-Nicolson-Verfahrenliefert
un+1j − un
j
τ= θLxxu
n+1j + (1 − θ)Lxxu
nj , (4.89)
woraus der Verstarkungsfaktor hergeleitet wird als
∣∣∣Gk
∣∣∣ =
∣∣∣∣1 − 2(θ − 1)β(1 − cos ξ′k)
1 + 2θβ(1 − cos ξ′k)
∣∣∣∣ . (4.90)
29. November 2007

109 4 Grundtypen von Losungsverfahren
Das verallgemeinerte Crank-Nicolson-Verfahren beinhaltet das explizite Euler-Verfahren (θ = 0), das implizite Euler-Verfahren (θ = 1) sowie das klassi-sche Crank-Nicolson-Verfahren (θ = 1/2). Die Fehlerordnung des Verfahrensist O((θ− 1/2)τ, τ2, h2). Fur θ = 1/2 erhalt man die Ordnung O(τ2, h2). DasVerfahren ist unbedingt stabil fur 1/2 ≤ θ ≤ 1; fur 0 ≤ θ < 1/2 ist es bedingtstabil fur β ≤ 1/(2 − 4θ).
Da bei impliziten Verfahren die Losung un+1j zum Zeitschritt (n+1) von den
anderen Werten un+1i abhangt, ist in der Regel ein grosses Gleichungssystem
zu losen, z. B.
Implizites Euler-Verfahren: (I − τL)un+1 = un
Crank-Nicolson-Verfahren: (I − 1
2τL)un+1 = (I +
1
2τL)un .
Das entstehende Gleichungssystem Aun+1 = b ist ahnlich strukturiert wie beiden diskretisierten elliptischen Gleichungen. Es konnen daher dieselben Losungs-verfahren angewandt werden wie in Kapitel 4.2 angegeben, insbesondere auchdie dort besprochenen Iterationsverfahren.
Zum Abschluss sei auch die zweidimensionale Diffusionsgleichung
∂u
∂t= ν
(∂2u
∂x2+∂2u
∂y2
)(4.91)
fur eine Grosse u(x, y, t) betrachtet, welche zusammen mit der Anfangsbe-dingung u(x, y, 0) = g(x, y) und Neumann- resp. Dirichlet-Randbedingungengelost werden soll. Mit der Abkurzung un
j,k ≈ u(x = xj , y = yk, t = tn) lasstsich die raumliche Diskretisierung zweiter Ordnung schreiben als
∂2u
∂x2
∣∣∣∣n
j,k
≈ Lxxunj,k =
1
h2x
(unj−1,k − 2un
j,k + unj+1,k) (4.92)
∂2u
∂y2
∣∣∣∣n
j,k
≈ Lyyunj,k =
1
h2y
(unj,k−1 − 2un
j,k + unj,k+1) . (4.93)
Die zeitliche Diskretisierung mit dem verallgemeinerten Crank-Nicolson-Verfahren liefert
un+1j,k − un
j,k
τ= ν
(θLxx u
n+1j,k + (1 − θ)Lxx u
nj,k
+ θLyy un+1j,k + (1 − θ)Lyy u
nj,k
). (4.94)
Wintersemester 2007/2008

4.3 Parabolische Gleichungen 110
Im Falle θ = 0 (explizites Eulerverfahren) ist das Verfahren stabil fur
β = ντ
(1
h2x
+1
hyy2
)≤ 1
2. (4.95)
Eine Klasse von Verfahren, die weit verbreitet ist und insbesondere zur effi-zienten Berechnung von zweidimensionalen Problemen eingesetzt wird, ist dasADI-Verfahren (Alternating-Direction-Implicit). Ziel des Verfahrens ist es, diebei impliziten Verfahren auftretenden zu invertierenden Matrizen so zu modi-fizieren, dass ihre Invertierung vereinfacht wird. Erreicht wird dies durch einenzweistufigen Algorithmus, bei dem in jeder Stufe nur eine der beiden Koordina-tenrichtungen implizit behandelt wird,
un+1/2j,k − un
j,k
τ=
ν
2
[Lxx u
n+1/2j,k + Lyy u
nj,k
](4.96)
un+1j,k − u
n+1/2j,k
τ=
ν
2
[Lxx u
n+1/2j,k + Lyy u
n+1j,k
]. (4.97)
Das Verfahren ist von der Ordnung O(τt2, h2x, h
2y) und unbedingt stabil. Die
beim ADI-Verfahren zu losenden Gleichungssysteme sind jeweils tridiagonal undkonnen entsprechend effizient gelost werden.
[CC99] T. Cebeci and J. Cousteix. Modeling and Computation of Boundary-Layer Flows. Springer, Berlin, 1999.
[Fle91] C. A. J. Fletcher. Computational Techniques for Fluid Dynamics.Springer, Berlin, 1991.
[Hir90] C. Hirsch. Numerical Computation of Internal and External Flows.John Wiley & Sons, Chichester, 1990.
[LeV92] R. J. LeVeque. Numerical Methods for Conservation Laws. Birkhauser,Basel, 2nd edition, 1992.
[LeV02] R. J. LeVeque. Finite Volume Methods for Hyperbolic Problems. Cam-bridge University Press, 2002.
[MM94] K. W. Morton and D. F. Mayers. Numerical Solution of Partial Diffe-rential Equations. Cambridge University Press, 1994.
[Moi01] P. Moin. Fundamentals of Engineering Numerical Analysis. CambridgeUniversity Press, 2001.
29. November 2007
111 4 Grundtypen von Losungsverfahren
[Sch99] M. Schafer. Numerik im Maschinenbau. Springer, Berlin, 1999.
[TAP97] J. C. Tannehill, D. A. Anderson, and R. H. Pletcher. ComputationalFluid Dynamics and Heat Transfer. Taylor & Francis, Washington,London, 2nd edition, 1997.
[Wes92] P. Wesseling. An Introduction to Multigrid Methods. Wiley, Chiche-ster, 1992.
[Wes01] P. Wesseling. Principles of Computational Fluid Dynamics. Springer,Berlin, 2001.
Wintersemester 2007/2008
113
Kapitel 5
Berechnung inkompressibler Stromungen
Oft wird bei der Berechnung von Stromungen Inkompressibilitat angenommen,d. h. dass die Dichte ρ jedes materiellen Fluidpartikels im Verlauf der Stromungkonstant bleibt, so dass fur das Dichtefeld ρ(x, t) in der Eulerschen Betrach-tungsweise gilt
Dρ
Dt≡ ∂ρ
∂t+ u·∇ρ = 0 . (5.1)
Zu beachten ist die Tatsache, dass die Dichte ρ(x, t) nicht konstant sein muss.Die Inkompressibilitat ist eine Eigenschaft der Stromung und nicht des Fluids.Ob die Kompressibilitat berucksichtigt werden muss, hangt von der MachzahlMa = u/a (mit der Stromungsgeschwindigkeit u und der Schallgeschwindigkeita) ab. Bei einer Machzahl von Ma2 ≪ 1 kann man die Stromung als inkom-pressibel betrachten. In der Praxis setzt man oft den Grenzwert bei Ma . 0.3an (fur Luft also u . 100 m/s oder 360 km/h).
Aus der Kontinuitatsgleichung ∂ρ/∂t+ u·∇ρ + ρ div u = 0 und (5.1) folgtdie Bedingung der Divergenzfreiheit
∇·u = 0 , (5.2)
das Stromungsfeld ist quellenfrei. In dieser Gleichung ist die Zeitableitung vonρ entfallen, und das System der Erhaltungsgleichungen andert gegenuber demkompressiblen Fall seine Natur und erfordert eine besondere Behandlung.
5.1 Grundgleichungen in primitiven Variablen
Die Navier-Stokes-Gleichung reduziert sich unter der zusatzlichen Annahme ρ =const., welche wir im Folgenden treffen wollen, auf
∂u
∂t+ (u·∇)u = −∇P + ν∆u , (5.3)
Wintersemester 2007/2008
5.2 Druckprojektion 114
mit der Abkurzung (im Folgenden ebenfalls als Druck bezeichnet) P := p/ρ.Die Kontinuitatsgleichung (5.2) und die Navier-Stokes-Gleichung (5.3) seien
auf dem Bereich G mit Rand- und Anfangsbedingungen zu losen,
u|∂G = g , (5.4a)
u(x, t = 0) = u0(x) . (5.4b)
Die Gleichungen haben im instationaren Fall parabolischen und im stationarenFall (∂u/∂t = 0) elliptischen Charakter.
Die besondere Schwierigkeit bei der numerischen Losung der Grundgleichun-gen besteht in der Erfullung der Divergenzfreiheit, ∇·u = 0, und damit gekop-pelt der Berechnung des Druckes P . Die Kontinuitatsgleichung enthalt keineZeitableitung, sondern stellt eine
”Nebenbedingung“ dar, unter der sich das Ge-
schwindigkeitsfeld in der Zeit entwickelt. Diese wird dadurch erfullt, dass sichder Druck P in jedem Moment so anpasst, dass die Losung von (5.3) auch(5.2) erfullt.
5.2 Druckprojektion
Fur das Verstandnis der Problematik der Druckberechnung ist eine geometrischebzw. funktional-analytische Interpretation nutzlich.
Dazu sei zunachst daran erinnert, dass jedes auf G definierte Vektorfeld wgemass Helmholtz additiv zerlegt werden kann in einen quellenfreien Anteil vund einen wirbelfreien Anteil ∇φ,
w = v + ∇φ (5.5)
wobei div v = 0 ist und z.B. n · v|∂G = 0 gewahlt werden kann (die Helmholtz-Komponente v ist also parallel zum Rand von G). Wir finden bei gegebenemVektorfeld w die Helmholtz-Komponenten v und ∇φ, indem wir die Divergenzvon Gleichung (5.5) berechnen
divw = div v︸︷︷︸=0
+ div∇φ︸ ︷︷ ︸≡div grad φ≡∆φ
. (5.6)
Wir erhalten also als Bestimmungsgleichung fur φ
∆φ = divw in G (5.7)
29. November 2007
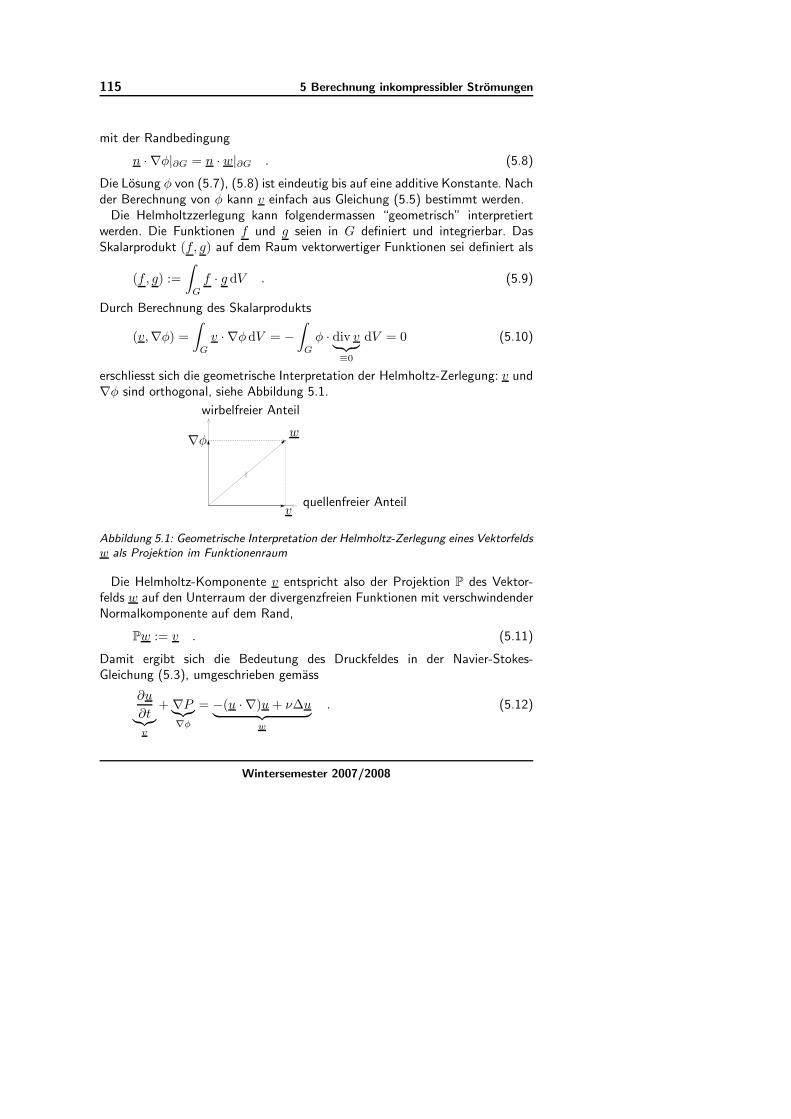
115 5 Berechnung inkompressibler Stromungen
mit der Randbedingung
n · ∇φ|∂G = n · w|∂G . (5.8)
Die Losung φ von (5.7), (5.8) ist eindeutig bis auf eine additive Konstante. Nachder Berechnung von φ kann v einfach aus Gleichung (5.5) bestimmt werden.
Die Helmholtzzerlegung kann folgendermassen “geometrisch” interpretiertwerden. Die Funktionen f und g seien in G definiert und integrierbar. DasSkalarprodukt (f, g) auf dem Raum vektorwertiger Funktionen sei definiert als
(f, g) :=
∫
G
f · g dV . (5.9)
Durch Berechnung des Skalarprodukts
(v,∇φ) =
∫
G
v · ∇φdV = −∫
G
φ · div v︸︷︷︸≡0
dV = 0 (5.10)
erschliesst sich die geometrische Interpretation der Helmholtz-Zerlegung: v und∇φ sind orthogonal, siehe Abbildung 5.1.
wirbelfreier Anteil
quellenfreier Anteilv
∇φ w
Abbildung 5.1: Geometrische Interpretation der Helmholtz-Zerlegung eines Vektorfeldsw als Projektion im Funktionenraum
Die Helmholtz-Komponente v entspricht also der Projektion P des Vektor-felds w auf den Unterraum der divergenzfreien Funktionen mit verschwindenderNormalkomponente auf dem Rand,
Pw := v . (5.11)
Damit ergibt sich die Bedeutung des Druckfeldes in der Navier-Stokes-Gleichung (5.3), umgeschrieben gemass
∂u
∂t︸︷︷︸v
+ ∇P︸︷︷︸∇φ
= −(u · ∇)u + ν∆u︸ ︷︷ ︸w
. (5.12)
Wintersemester 2007/2008

5.3 Losungsmethoden in primitiven Variablen 116
Wegen (5.2) und der Vertauschbarkeit der Ableitungen ist auch ∂u/∂t quel-lenfrei und parallel zum Rand, und die zeitliche Entwicklung des Geschwindig-keitsfeldes u erfolgt im divergenzfreien Unterraum. Sie ergibt sich also durchAnwendung des Projektionsoperators P auf den Ausdruck −(u · ∇)u + ν∆u
∂u
∂t= P (−(u · ∇)u + ν∆u) , (5.13)
womit der Druck P formal aus Gleichung (5.12) eliminiert ist. In der Praxismuss jedoch die Projektion P gerade mittels der Druckberechnung realisiertwerden. Durch Anwendung des Divergenzoperators auf Gleichung (5.12) erhaltman eine Poisson-Gleichung, also eine Gleichung vom elliptischen Typ, fur denDruck P
∆P = div (−(u∇) · u+ ν∆u) , (5.14)
aus der man bei bekanntem u den Druck berechnen kann, wenn man Randbe-dingungen fur den Druck kennt.
5.3 Losungsmethoden in primitiven Variablen
Im Laufe der Zeit wurden die verschiedensten Vorgehensweisen zur Losung dergekoppelten Druck-Geschwindigkeits-Gleichungen entwickelt (siehe Literaturan-gaben am Ende des Kapitels), von denen wir hier nur wenige skizzieren. DieSpannweite reicht von der direkten Losung des gekoppelten Systems in jedemZeitschritt bis hin zu geschachtelten iterativen Verfahren mit allerlei Approxima-tionen und Massnahmen zur Verbesserung der Konvergenz. Dabei wird jeweilsfur den Druck P eine elliptische Gleichung vom Typ der Poisson-Gleichungaufgestellt, die mit – je nach Verfahren unterschiedlichen – Randbedingungendirekt oder naherungsweise iterativ gelost wird.
Besondere Beachtung erfordert auch die Variablenanordnung in Bezug aufdas diskrete Gitter. Verwendet man zentrale Differenzen in der Kontinuitatsglei-chung und sind Druck und Geschwindigkeit in denselben Punkten diskretisiert(colocated grid), so konnen im diskreten Druckfeld unphysikalische, kurzwelligeOszillationen entstehen, die (in 2D) einem Schachbrettmuster entsprechen. Die-ses Problem lasst sich vermeiden, indem man entweder die Gitterpunkte fur denDruck auf einem in jede Raumrichtung um eine halbe Schrittweite versetztenGitter (staggered grid) anordnet, oder durch andere Massnahmen wie geeigneteInterpolationen.
29. November 2007

117 5 Berechnung inkompressibler Stromungen
5.3.1 Volldiskretisierte Gleichungen
Um das Vorgehen bei Verwendung der u-P -Gleichungen exemplarisch zuerlautern, diskretisieren wir die Navier-Stokes-Gleichung (5.3) auch raumlich.Dabei werden die Operatoren ∇ und ∆ durch diskretisierte Operatoren ∇N
und ∆N = ∇N ·∇N ersetzt. Gegebenenfalls sind dabei verschiedene Operato-ren divN und gradN zu verwenden, ∆N = divN · gradN . Die Zeitintegrationfur die advektiven (nichtlinearen) Terme sei hier der Einfachheit der Darstel-lung halber mit dem expliziten Euler-Verfahren vorgenommen (nicht fur diePraxis empfohlen, kann allerdings als Runge-Kutta-Unterschritt angesehen wer-den). Die diffusiven (viskosen) Terme werden mit dem verallgemeinerten Crank-Nicholson-Verfahren (Parameter θ) diskretisiert, um die restriktiven Zeitschritt-beschrankungen expliziter Verfahren bei kleinen Reynoldszahlen (grossem ν) zuumgehen. Der Druck P wird ebenfalls implizit (z. B. mit dem Euler-Verfahren)diskretisiert. Die voll diskretisierte Kontinuitats- und Navier-Stokes-Gleichungergibt sich demnach zu
∇N · un+1 = 0 (5.15)
und
un+1 − un
∆t= − (un ·∇N ) un −∇NP
n+1 + ν(1 − θ)∆Nu
n + θ∆Nun+1
(5.16)
mit der Randbedingung
un+1∣∣∂G
= g . (5.17)
Zur Herleitung einer Bestimmungsgleichung fur den Druck Pn+1 bildetman die Divergenz der diskretisierten Navier-Stokes-Gleichung (5.16), d.h.∇N ·(5.16), und erhalt die Gleichung
∆NPn+1 =
1
∆t(∇N ·un) + ν(1 − θ)∆N (∇N ·un)
︸ ︷︷ ︸≡0 falls exakt ∇N ·un≡0
−∇N ·(un ·∇N )un .
(5.18)
Die ersten beiden Terme auf der rechten Seite von Gleichung (5.18) verschwin-den, wenn die Divergenz des Geschwindigkeitsfeldes un zum alten Zeitschritt
Wintersemester 2007/2008
5.3 Losungsmethoden in primitiven Variablen 118
exakt null ist. Da allerdings die Divergenzfreiheit nur bis auf numerische Ge-nauigkeit erfullt ist, empfiehlt es sich, diese Terme mitzufuhren, um ein zeit-liches Anwachsen der Divergenzfehler zu vermeiden. Man beachte, dass dieOperatoren diskret formuliert sind, so dass die Divergenz diskret ausgewertetverschwindet.
Gleichung (5.18) ist eine Poisson-Gleichung fur Pn+1 und somit vom ellip-tischen Typ. Daher benotigt sie eine Randbedingung auf jedem Randpunkt.Pn+1|∂G muss so bestimmt werden, dass
∇N ·un+1∣∣∂G
= 0
ist. Die Randbedingung stellt die einzige Kopplung zwischen dem Geschwindig-keitsfeld un+1 und dem Druck Pn+1 dar. Die Poisson-Gleichung (5.18) selbstist entkoppelt von un+1.
Man erhalt folgendes Gleichungssystem, bestehend aus einer Helmholtzglei-chung fur jede Geschwindigkeitskomponente und einer Poisson-Gleichung furP , das gelost werden muss:
• Impulsgleichung (Helmholtzgleichung fur un+1)
θν∆Nun+1 − 1
∆tun+1 −∇NP
n+1 = r (5.19a)
mit
r = − 1
∆tun + (un ·∇N )un − ν(1 − θ)∆Nu
n (5.19b)
und der Randbedingung
un+1∣∣∂G
= g . (5.19c)
• Poisson-Gleichung fur den Druck
∆NPn+1 = −∇N ·r (5.20a)
mit der Randbedingung
Pn+1∣∣∂G
derart, dass ∇N ·un+1∣∣∂G
= 0 . (5.20b)
Die Kopplung zwischen Pn+1 und un+1 aufgrund der Randbedingung (5.20b)fur die Poisson-Gleichung fur den Druck Pn+1 kann z.B. mit der Einflussma-trixmethode oder der Zwischenschritt-Methode behandelt werden. Mit letztererverwandt sind die Druckkorrektur-Methoden.
29. November 2007

119 5 Berechnung inkompressibler Stromungen
5.3.2 Einflussmatrix-Methode
Aus dem linearen Zusammenhang zwischen Pn+1∣∣∂G
und ∇N ·un+1∣∣∂G
kann
eine Bedingung fur Pn+1∣∣∂G
hergeleitet werden. Dadurch ist es moglich, das
Gleichungssystem fur Pn+1 und die drei Komponenten un+1i entkoppelt se-
quentiell zu losen. Die Einflussmatrixmethode stellt eine exakte Losung derKopplungsbedingung dar und garantiert numerisch exakte Divergenzfreiheit desGeschwindigkeitsfeldes un+1 (siehe [CHQZ88, DFM02] unter “Influence MatrixMethod”). Dementsprechend wird sie mit grossem Erfolg in Forschungscodesmit Diskretisierungen hoher Ordnung eingesetzt. Sie ist in ein- oder zweidimen-sionalen Problemen leicht anzuwenden, wird aber im Dreidimensionalen sehraufwendig.
5.3.3 Zwischenschritt-Methode
Bei der Zwischenschritt-Methode (fractional step method) wird Gl. (5.16) auf-gespalten in folgende Teilschritte, wobei u∗ eine Zwischenlosung bezeichnet,die den Druck nicht berucksichtigt und nicht divergenzfrei ist,
(1)
u∗ − un
∆t= − (un ·∇N )un + ν (1 − θ)∆Nu
n + θ∆Nu∗ (5.21a)
mit der Randbedingung
u∗|∂G = g (5.21b)
(2)
un+1 − u∗
∆t= −∇NP
n+1 . (5.22)
Aus ∇N ·(5.22) folgt mit der Bedingung, dass ∇N ·un+1 = 0 sein soll, diePoisson-Gleichung fur den Druck
∆NPn+1 =
1
∆t∇N ·u∗ . (5.23a)
Des weiteren erhalt man als Randbedingung der Poisson-Gleichung aus (5.22)multipliziert mit dem Normalenvektor n auf ∂G zusammen mit den Randbe-dingungen (5.21b) und (5.17) die Neumann-Randbedingung
n · ∇NPn+1 = 0 . (5.23b)
Wintersemester 2007/2008
5.3 Losungsmethoden in primitiven Variablen 120
Fur die Zeitintegration tn → tn+1 wird zuerst Gl. (5.21a) mit (5.21b) gelost. Of-fensichtlich ist im allgemeinen ∇N·u∗ 6≡ 0. Danach wird Gl. (5.23a) mit (5.23b)fur den Druck Pn+1 gelost, welcher zur Berechnung von un+1 nach Gl. (5.22)benotigt wird. Die Tangentialkomponenten der Randbedingung (5.17) fur un+1
werden bei dieser Methode allerdings nicht exakt erfullt.Die Randbedingung (5.17) kann aber mit der Genauigkeit O(∆t) erfullt wer-
den, indem man (5.21b) ersetzt durch
u∗|∂G = g + ∆t∇NPn . (5.24)
Man beachte, dass dann die Richtung n normal zu ∂G aufgrund (5.23b) iden-tisch behandelt wird wie bei Verwendung von (5.21b). Fur die Randbedingungenin den Richtungen s parallel zu ∂G gilt jedoch s un+1
∣∣∂G
= s g+O(∆t). AuchKorrekturen hoherer Ordnung in ∆t sind moglich [DFM02].
5.3.4 Druckkorrektur-Methoden
Nahe verwandt mit der Zwischenschritt-Methode sind die verschiedenenDruckkorrektur-Methoden [VM95, FP02, Sch99, Wes01]. Dabei wird in einemersten Schritt (entsprechend (5.21a)) bereits der Druck Pn berucksichtigt unddanach noch eine Korrektur δp = Pn+1−Pn berechnet. Die bekannteste ist dassogenannte SIMPLE-Verfahren (semi-implicit method for pressure-linked equa-tions), zu der zahlreiche Varianten (z.B. SIMPLER, PISO) entwickelt wurden,die oft eng verwoben sind mit speziellen Diskretisierungsverfahren. Sie sind inkommerziellen CFD-Codes weit verbreitet, da sie anpassungsfahig und bei ge-eigneter Anwendung (ggf. mit Unterrelaxation) auch effizient sind. Gemeinsamist diesen Verfahren eine iterative Losung der gekoppelten Gleichungen fur un+1
und Pn+1, wobei nach den Differenzen der Losung in aufeinanderfolgenden Ite-rationsstufen (“Korrekturen”) aufgelost wird. Die diskreten Gleichungen werdendurch Linearisierung und vereinfachende Approximationen so modifiziert, dasssie relativ einfach sequentiell iterativ gelost werden konnen. Um Konvergenz zuerreichen, ist beim SIMPLE-Verfahren eine Unterrelaxation notig. Fur nahereEinzelheiten muss hier auf die genannte Literatur verwiesen werden.
5.3.5 Methode der kunstlichen Kompressibilitat
Bei der Methode der kunstlichen Kompressibilitat wird die in (5.2) verlo-ren gegangene Zeitableitung wieder kunstlich eingefuhrt. Die Kontinuitatsglei-
29. November 2007
121 5 Berechnung inkompressibler Stromungen
chung (5.2) wird ersetzt durch
1
β2
∂P
∂t+ ∇·u = 0 . (5.25)
Hierbei ist β ein freier Parameter, der eine Pseudo-Schallgeschwindigkeit re-prasentiert. Zum Vergleich folgt aus der Isentropiebedingung fur kompressibleStromungen
1
a2
1
ρ
Dp
Dt+ ∇·u = 0 , (5.26)
wobei a die Schallgeschwindigkeit und p = ρP ist.Wahrend die bisher besprochenen Methoden fur instationare Stromungen
konzipiert sind, ist die Methode der kunstlichen Kompressibilitat nur geeignetzur Berechnung stationarer inkompressibler Stromungen, welche nach Abklin-gen der zeitlichen Transienten asymptotisch erreicht werden. Dort verschwindetdie Zeitableitung des Druckes in (5.25) und die Kontinuitatsgleichung (5.2) wirderfullt. Das transiente Verhalten in der Zeit bis zum Erreichen der stationarenLosung ist allerdings unphysikalisch. Das Verfahren ist wegen der Einfuhrungder kunstlichen Zeitableitung des Druckes in der Kontinuitatsgleichung nichtzeitgenau und daher nicht anwendbar fur instationare Probleme.
Die Divergenzfreiheit des Geschwindigkeitsfeldes gemass der Kontinuitatsglei-chung (5.2) entspricht Gleichung (5.25), falls β → ∞. Aus diesem Grund mussβ sehr gross gewahlt werden. Die Wahl des Parameters β hat allerdings starkenEinfluss auf die Stabilitat und das Konvergenzverhalten des Verfahrens. DurchErsetzen der Gl. (5.2) durch (5.25) wird das System hyberbolisch und kann miteinem entsprechenden Verfahren gelost werden [Hir90].
5.4 Alternative Formulierungen der Bewegungsgleichung
Die storende Sonderrolle des Drucks bei der Losung der Impulsgleichung (5.3)hat zu alternativen Formulierungen der Bewegungsgleichung gefuhrt, in denender Druck eliminiert ist.
5.4.1 Wirbelstarke-Vektorpotential-Formulierung
Durch Verwendung der Variablen Wirbelstarke
ω = rot u = ∇×u (5.27)
Wintersemester 2007/2008

5.4 Alternative Formulierungen der Bewegungsgleichung 122
und Vektorpotential ψ mit
u = rot Ψ = ∇×Ψ (5.28)
(in 2D: Stromfunktion Ψ(x, y), Ψ = Ψ·ez) anstelle der primitiven Variablen uund p tritt der Druck p nicht mehr in den entsprechenden Transportgleichungenauf. Aus Gl. (5.28) folgt wegen ∇·(∇×a) ≡ 0 fur beliebige Vektoren a, dassdas Geschwindigkeitsfeld u automatisch die Kontinuitatsgleichung (5.2) erfullt.
Fur das Vektorpotential ergibt sich die folgende Poisson-Gleichung
∆Ψ = −ω . (5.29)
(Anmerkung: Fur zweidimensionale Probleme ergibt sich (5.29) durch Einsetzenvon (5.28) in (5.27). Bei dreidimensionalen Problemen beachtet man, dass ∇×(∇×Ψ∗) = ∇(∇·Ψ∗)−∆Ψ∗. Zu Ψ∗ kann jedoch ein beliebiges Gradientenfeld∇Φ addiert werden, wobei Gl. (5.28) aufgrund ∇×(∇Φ) = 0 weiterhin gilt.Das Gradientenfeld ∇Φ wird so bestimmt, dass Ψ = Ψ∗ + ∇Φ divergenzfreiist, d. h. ∇·Ψ = ∇·Ψ∗ + ∆Φ = 0, woraus Gl. (5.29) folgt.)
Die fur die Zeitintegration entscheidende Transportgleichung ist die Wirbel-transportgleichung, die man aus ∇×(5.3) mit (5.2) zu
∂ω
∂t+ (u · ∇)ω − (ω ·∇)u = ν∆ω (5.30)
erhalt. Fur zweidimensionale Probleme verschwindet der Wirbelstreckungs-Term (ω ·∇)u in (5.30).
Gleichungen (5.28)–(5.30) bilden das Gleichungssystem, mit dem die inkom-pressible Stromung beschrieben wird. Die Randbedingungen an festen Wandensind gegeben durch
∂Ψ
∂n
∣∣∣∣∂G
= Ψ·s|∂G = 0 (5.31)
und
ω ·n|∂G = 0 . (5.32)
Die Komponenten von ω parallel zu ∂G enthalten nur Geschwindigkeitsablei-tungen normal zu ∂G und sind im Allgemeinen nicht bekannt, sondern mussengemass ihrer Definition numerisch diskretisiert werden.
29. November 2007
123 5 Berechnung inkompressibler Stromungen
Die Berechnung zweidimensionaler Probleme mit der Wirbelstarke-Vektorpotential-Formulierung, respektive Wirbelstarke-Stromfunktions-Formulierung, ist besonders effektiv und deshalb weit verbreitet, da sie nur diezwei skalaren Variablen ω = ω·ez und Ψ = Ψ·ez benotigt. Fur dreidimensionaleProbleme mussen jedoch insgesamt 6 Gleichungen fur alle Komponentenvon ω und Ψ gelost werden, weswegen diese Formulierung aufwendiger ist alsMethoden basierend auf den primitiven Variablen.
5.4.2 Wirbelstarke-Geschwindigkeits-Formulierung
Eine weitere Moglichkeit fur die Berechnung inkompressibler Stromun-gen ist die Verwendung der Variablen Wirbelstarke ω und Geschwin-digkeit u anstelle des Vektorpotentials aus Kap. 5.4.1. Ebenso wie beider Wirbelstarke-Vektorpotential-Formulierung wird die Wirbeltransportglei-chung (5.30) mit (5.27) verwendet. Aus Gl. (5.27) und (5.2) ergibt sich
∆u = −∇× ω (5.33)
mit den Randbedingungen (5.4a) und (5.32). Auch hier begegnet man dem be-reits genannten Problem der i. A. unbekannten Randbedingungen fur die Tan-gentialkomponente der Wirbelstarke, das wieder nur durch direkte numerischeDiskretisierung behandelt werden kann. Diesem prinzipiellen Kopplungsproblemkann man mit keiner Formulierung entrinnen.
[CHQZ88] C. Canuto, M. Y. Hussaini, A. Quarteroni, and T. A. Zang. SpectralMethods in Fluid Dynamics. Springer, Berlin, Germany, 1988.
[DFM02] M. O. Deville, P. F. Fischer, and E. H. Mund. High-Order Me-thods for Incompressible Fluid Flow. Cambridge University Press,Cambridge, 2002.
[FP02] J. H. Ferziger and M. Peric. Computational Methods for FluidDynamics. Springer, Berlin, 2002.
[Hir90] C. Hirsch. Numerical Computation of Internal and External Flows.John Wiley & Sons, Chichester, 1990.
[Sch99] M. Schafer. Numerik im Maschinenbau. Springer, Berlin, 1999.
[VM95] H. K. Versteeg and W. Malalasekera. An Introduction to Compu-tational Fluid Dynamics – The Finite Volume Method. Longman,Essex, 1995.
Wintersemester 2007/2008
5.4 Alternative Formulierungen der Bewegungsgleichung 124
[Wes01] P. Wesseling. Principles of Computational Fluid Dynamics. Springer,Berlin, 2001.
29. November 2007

125
Kapitel 6
Turbulente Stromungen
Man unterscheidet zwischen laminaren Stromungen, die intuitiv als geordnetund regular angesehen werden konnen, und turbulenten Stromungen, die oftauch als chaotisch, unregelmassig und stark fluktuierend bezeichnet werden.Den Ubergang vom laminaren in den turbulenten Zustand einer Stromung be-zeichnet man als Transition. In der Regel sind laminare Stromungen bei aus-reichend grossen Reynoldszahlen instabil gegenuber kleinen Storungen. DieseStorungen wachsen an und fuhren uber zunehmend kompliziertere Zwischen-stadien schliesslich zum turbulenten Zustand, in dem ein intensiver Transportvon Stoffen, Impuls und Energie stattfindet. Man geht im allgemeinen davonaus, dass der ausgebildete turbulente Zustand unabhangig ist von der Art, wiedie Transition eingeleitet wurde.
Turbulente Stromungen sind stets instationar, dreidimensional und wirbelbe-haftet. Sie bilden eine Energiekaskade aus, die man sich vereinfacht so vorstellenkann, dass grossere Wirbel (engl. eddies) sukzessive Energie auf kleinere Wirbelubertragen, bis hinunter zu einer kleinsten Wirbelgrosse, auf der sie so stark vonder molekularen Viskositat beeinflusst werden, dass die ubertragene kinetischeEnergie in Warme dissipiert wird. Die Energiequelle fur diese Kaskade stecktin der antreibenden grossskaligen Stromung, z. B. der Aussenstromung einerGrenzschicht oder dem aufgepragten Druckgradienten in einer Rohrstromung.
Turbulente Stromungen weisen daher in der Regel ein breites Spektrum vonLangen- und Zeitskalen auf. Die Abmessung L der grossten turbulenten Struk-turen, das integrale Langenmass der Turbulenz, ist typischerweise von derGrossenordnung einer charakteristischen Abmessung des Stromungsfeldes, z. B.der Grenzschichtdicke. Die Abmessung lK der kleinsten turbulenten Bewegun-gen, deren kinetische Energie dissipiert wird, nennt man das KolmogorovscheLangenmass. lK ist bei statistisch stationaren Verhaltnissen nur von der ein-gebrachten Leistung (welche in diesem Fall der Dissipationsrate entsprechenmuss) und der kinematischen Viskositat des Fluids abhangig. Mittels einer Di-
Wintersemester 2007/2008

6 Turbulente Stromungen 126
mensionsanalyse, d. h. einer geeigneten Kombination der plausiblen Variablen(kinematische Viskositat ν und massenspezifische Dissipationsrate ε) kann mandann herleiten, dass
lK =
(ν3
ε
) 14
. (6.1)
Fur die Verhaltnisse zwischen den grossten und kleinsten Langen- und Zeitmas-sen in einem Turbulenzfeld gilt
L
lK∝ Re3/4 (6.2a)
T
tK∝ Re1/2 . (6.2b)
Dabei ist Re die mit dem integralen Langen- und Geschwindigkeitsmass desTurbulenzfeldes bestimmte Reynoldszahl.
In Abbildung 6.1 sind experimentell gemessene Spektren E(k) der kinetischenEnergie der turbulenten Fluktuationen von Grenzschichtstromungen bei grossenReynoldszahlen gezeigt [Sad97]. Es lassen sich drei Bereiche der Wellenzahlk = 2π/λ (λ ist die Wellenlange) voneinander unterscheiden:
A: der Bereich der integralen, energietragenden Skalen,
B: der Tragheitsbereich E(k) ∝ k−5/3,
C: der Bereich der dissipativen Skalen.
Eine detaillierte numerische Simulation der Turbulenz, die sogenannte DirekteNumerische Simulation oder Direct Numerical Simulation (DNS), erfordert dieAuflosung aller relevanten Freiheitsgrade, das heisst die Auflosung aller Skalenbis hinein in den Dissipationsbereich, siehe Abschnitt 6.1.
Es wird heute allgemein angenommen, dass turbulente Stromungen in al-len Einzelheiten durch die Navier-Stokes-Gleichungen beschrieben werden. DieKomplexitat turbulenter Stromungen beruht hauptsachlich auf der nichtlinea-ren Wechselwirkung aller Skalen miteinander infolge des nichtlinearen konvek-tiven Terms der Impulsgleichung. Es gibt aber einige heuristische Hinweise,dass die tatsachliche Zahl der unabhangigen Freiheitsgrade bedeutend geringersein konnte, als man aufgrund der Spektralanalyse vermuten wurde. Ein Zielder Turbulenztheorie ist es, die relevanten Freiheitsgrade zu identifizieren und
29. November 2007
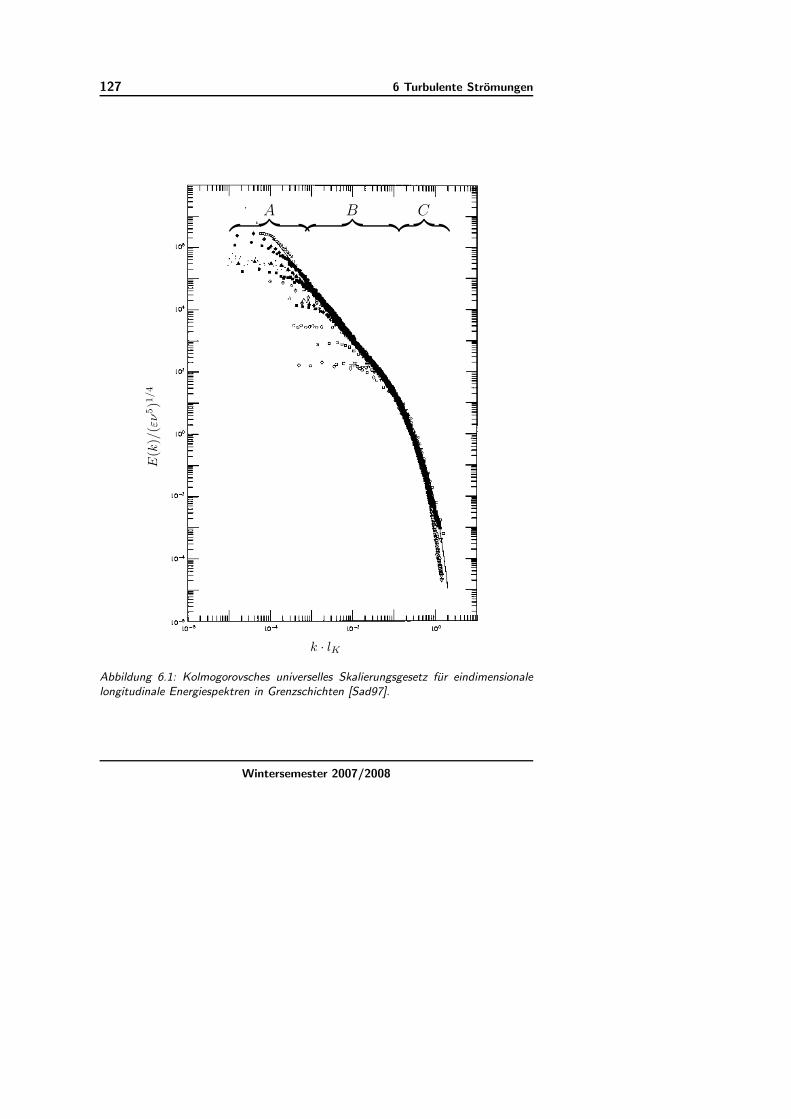
127 6 Turbulente Stromungen
A︷ ︸︸ ︷ B︷ ︸︸ ︷ C︷ ︸︸ ︷
k · lK
E(k
)/(εν
5)1
/4
Abbildung 6.1: Kolmogorovsches universelles Skalierungsgesetz fur eindimensionalelongitudinale Energiespektren in Grenzschichten [Sad97].
Wintersemester 2007/2008

6.1 Direkte Numerische Simulation 128
Beschreibungsmoglichkeiten von turbulenten Stromungen zu finden, die einfa-cher und weniger aufwendig sind als die Losung der Navier-Stokes-Gleichungenmit allen auftretenden Freiheitsgraden. Bisher existieren hierzu nur Ansatze fursehr einfache Stromungen. Oft entfernt man daher gezielt raumliche Skalen ausdem Problem, formal durch die Anwendung eines Tiefpassfilters (Grobstruktur-simulation, Abschnitt 6.3), oder indem man Gleichungen fur die statistischenMittelwerte herleitet (siehe Abschnitt 6.2). Mit vereinfachenden Annahmen furdie Wechselwirkung der entfernten und der verbleibenden Skalen kann manunter Zuhilfenahme von Ergebnissen aus der Turbulenztheorie oder empirisch-heuristisch Schliessungen fur die so hergeleiteten modifizierten Navier-Stokes-Gleichungen bekommen. Das fundamentale Problem der Turbulenz, dass eskeine geschlossene Theorie zur Beschreibung, und damit zur Berechnung, ihrerstatistischen Eigenschaften gibt, bleibt jedoch bestehen.
In den folgenden Notizen kann nur ein kurzer Abriss gegeben werden. Furweitere Informationen zur Thematik dieses Kapitels wird auf die Bucher vonPope [Pop00], Sagaut [Sag02], Durbin et al. [DR01] und Wilcox [Wil94] ver-wiesen.
6.1 Direkte Numerische Simulation
Der Bereich der Skalen, die in einer turbulenten Stromung existieren, hangtgemass Gl. (6.2) stark von der Reynoldszahl der Stromung ab. Betrachtet manzum Beispiel den turbulenten Freistrahl in Abbildung 6.2, erkennt man integra-le Skalen von der Grosse des Freistrahl-Umfangs, kleiner und kleiner werdendeWirbel bis hin zu kaum noch sichtbaren Skalen im Dissipationsbereich. FurAtmospharenstromungen beobachtet man eine Variation der relevanten turbu-lenten Langenmasse von ca. 106m (grosse Tiefdruckgebiete) bis ca. 10−3m(kleinste Wirbel).
In einer Direkten Numerischen Simulation (DNS) werden alle relevanten Ska-len des Spektrums einer transitionellen oder turbulenten Stromung numerischaufgelost, bis hin zu den dissipativen Skalen der Grossenordnung lK . Mankann daher nach Gleichung (6.2) abschatzen, dass in einer dreidimensiona-len Stromung die Anzahl der in einer DNS mitzufuhrenden Freiheitsgrade mitder Reynoldszahl skaliert wie (L/lK)3 ∝ Re9/4. Berucksichtigt man weiterhin,dass auch alle zeitlichen Skalen aufgelost werden mussen, so erhalt man einenweiteren Faktor Re3/4, so dass der Rechenaufwand einer DNS proportionalzu Re3 anwachst. Fur wandbegrenzte Stromungen werden diese Abschatzun-
29. November 2007
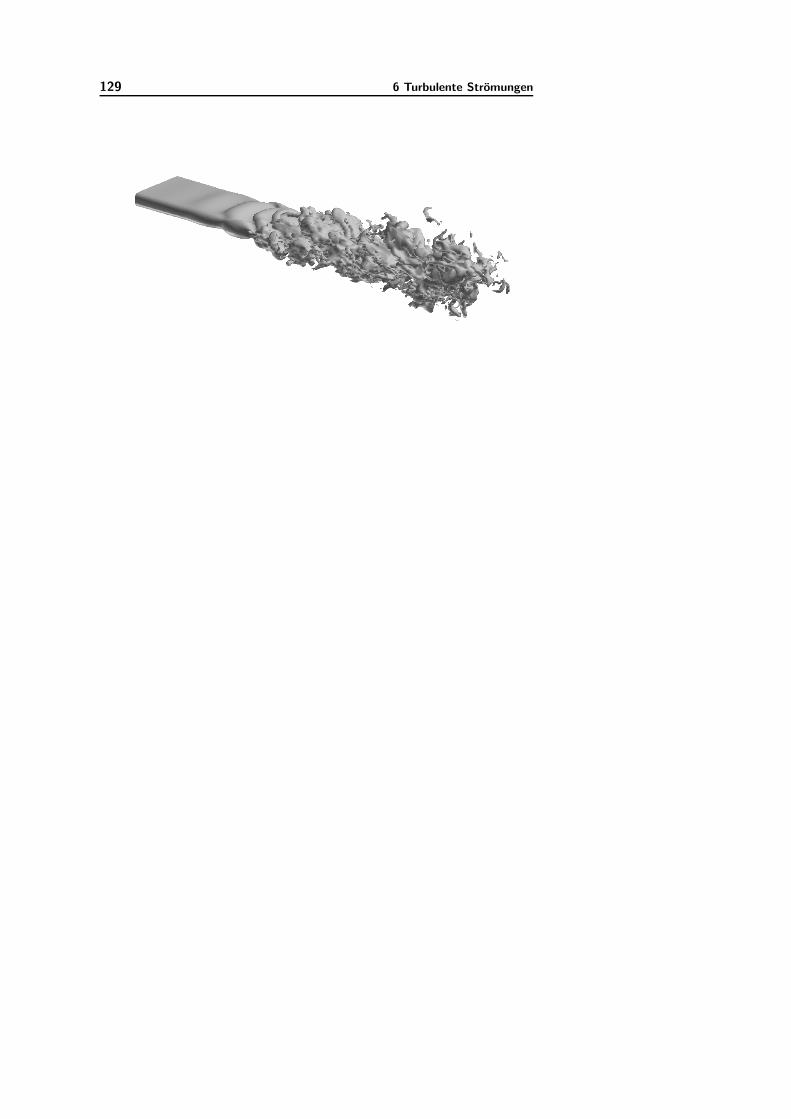
129 6 Turbulente Stromungen
Abbildung 6.2: Momentane Isoflache der Dichte bei einer direkten numerischen Simu-lation (DNS) eines rechteckigen turbulenten kompressiblen Freistrahls (B. Rembold)
gen noch ungunstiger, da sich im wandnahen Bereich die kleinsten turbulentenSkalen proportional zu ν/uτ verhalten, wobei uτ =
√|τw|/ρ die Schubspan-
nungsgeschwindigkeit ist und τw die Wandschubspannung. Fur Grenzschichtenkann man abschatzen, dass ungefahr uτ ∝ U
√Cf ∝ URe1/10 gilt (Cf ist der
Wandreibungskoeffizient). Dies fuhrt in einer Dimension auf eine Anzahl von
Freiheitsgraden proportional zu LURe−1/10/ν = Re9/10, so dass der Gesamt-aufwand einer instationaren, dreidimensionalen Simulation im ungunstigen Fallproportional zu Re36/10 werden kann [Pio97].
Man verwendet daher bei direkten numerischen Simulationen aus Effizienz-grunden Diskretisierungsverfahren hoher Ordnung mit guten Auflosungseigen-schaften. Mit solchen Verfahren kann man zumindest erreichen, dass die Pro-portionalitatskonstante fur die obigen Abschatzungen klein ist. Geeignet sindz. B. Spektralverfahren oder Differenzenverfahren hoher (z. B. vierter bis sech-ster) Ordnung.
Zur Illustration der Zahlenverhaltnisse sei noch folgende Abschatzungerwahnt: man hat grob abgeschatzt, dass man fur eine DNS der Stromung umein Verkehrsflugzeug bei typischen stationaren Flugbedingungen etwa 1300 Jah-re CPU Zeit auf einem 1 TFLOPs Computer benotigen wurde, um die Stromungfur den Zeitraum einer (physikalischen) Sekunde zu berechnen. Derzeitige
Wintersemester 2007/2008
6.2 Reynolds-gemittelte Gleichungen und Turbulenzmodelle 130
Schatzungen sagen, dass Computer mit einer Dauerleistung von 1 PFLOPs= 103 TFLOPs fur in der Stromungsmechanik gebrauchliche Algorithmen bisetwa 2010 verfugbar sein konnten. Fur grosse DNS wendet man heute in derForschung in manchen Fallen bis zu mehreren CPU-Monaten auf.
6.2 Reynolds-gemittelte Gleichungen und Turbulenzmodel-le
Die heute am weitesten verbreitete und meist auch einzige praktikable Methodezur Berechnung praxisnaher turbulenter Stromungen ist die statistische Simula-tion, die von den statistisch gemittelten Navier-Stokes-Gleichungen (Reynolds-averaged Navier-Stokes equations, RANS) ausgeht. In kartesischer Tensornota-tion (mit Summationskonvention, siehe z.B. [Pop00]) lauten diese Gleichungenfur den inkompressiblen Fall
∂<ui>
∂xi= 0 , (6.3a)
∂<ui>
∂t+
∂
∂xj(<ui><uj>) = −1
∂<p>
∂xi+
∂
∂xj(−<u′iu′j>)+ ν
∂2<ui>
∂xj∂xj
(6.3b)
wobei <ui>,<p> die statistischen Mittelwerte der Geschwindigkeitskom-ponenten und des Drucks bezeichnen. u′i bezeichnet die Geschwindigkeits-fluktuationen gemass der Aufspaltung
ui = <ui>+ u′i . (6.4)
Die Terme
τij := −<u′i u′j> (6.5)
werden als Reynoldsspannungen oder turbulente Scheinspannungen bezeichnetund stellen weitere Unbekannte im Gleichungssystem dar, fur die Schliessungs-annahmen in Form eines Turbulenzmodells eingefuhrt werden mussen (dimen-sionsmassig konsistent ware −ρ<u′iu′j> als Spannung zu bezeichnen, jedochvereinfacht die Definition (6.5) die Schreibweise). Turbulenzmodelle werden in[Wil94, DR01, Pop00] ausfuhrlich behandelt.
Bei den Turbulenzmodellen unterscheidet man zunachst zwei Gruppen: Wir-belzahigkeitsmodelle und Reynoldsspannungs-Modelle.
29. November 2007
131 6 Turbulente Stromungen
6.2.1 Wirbelzahigkeitsmodelle (eddy-viscosity models)
Bei Wirbelzahigkeits-Turbulenzmodellen werden die Reynoldsspannungen direktauf die Verformungsgeschwindigkeiten des mittleren Stromungsfeldes bezogen.In Verallgemeinerung des Newtonschen Schubspannungsansatzes fur eine lami-nare Stromung U(y), τ/ρ = νdU/dy, macht man den Ansatz
−<u′iu′j>+δij3<u′ku
′k> = νT
(∂<ui>
∂xj+∂<uj>
∂xi
), (6.6)
wobei νT als Wirbelzahigkeit (eddy-viscosity) bezeichnet wird. Im Unterschiedzur kinematischen Viskositat ν ist die Wirbelviskositat νT keine Materialkon-stante, sondern eine vom Turbulenzfeld abhangige Feldgrosse, fur die wiederumheuristisch oder empirisch begrundete Ansatze gemacht werden mussen.
Wirbelzahigkeitsmodelle kann man weiter nach der Anzahl der zusatzlich mit-gefuhrten Transportgleichungen klassifizieren, die fur die Berechnung von νT
benutzt werden:
(1) 0-Gleichungs-Turbulenzmodelle (algebraische Turbulenzmodelle):Als Beispiel sei ein einfaches, haufig benutztes algebraisches Turbulenz-modell fur eine ebene Grenzschicht angegeben, das nach Baldwin undLomax benannt ist (siehe [Wil94]). Fur eine ebene (statistisch) zwei-dimensionale Grenzschicht mit Stromab-Profil <u1>(x3) kann ein Mi-schungswegmodell nach Prandtl verwendet werden. Die Wirbelzahigkeitwird dabei wie folgt berechnet
νT = l2∣∣∣∣∂<u1>
∂x3
∣∣∣∣ , (6.7)
mit einem Mischungsweg l gemass
l = κx3
(1 − e−x+
3/A), κ = 0.41 . (6.8)
x+3 bezeichnet den Wandabstand in den ublichen turbulenten Wandein-
heiten, x+3 = x3uτ/ν. Die Konstante A ist vom Druckgradienten der
Stromung abhangig. Fur Grenzschichten ohne Druckgradient ist A = 26eine gute Wahl. Die hier gegebene Form des Mischungswegmodells wirdfur den ausseren Bereich der Grenzschicht ublicherweise noch modifiziert,
νTO= αρUeδ
∗FKleb(x3, δ) (6.9)
Wintersemester 2007/2008
6.2 Reynolds-gemittelte Gleichungen und Turbulenzmodelle 132
mit
FKleb =
(1 + 5.5
(x3
δ
)6)−1
, (6.10)
wobei Ue die Geschwindigkeit am Grenzschichtrand ist, δ die Grenz-schichtdicke und δ∗ die Verdrangungsdicke, und typischerweise α =0.0168 gesetzt wird.
(2) 1-Gleichungs-TurbulenzmodelleBei diesen Modellen wird z.B. eine Transportgleichung fur die kineti-sche Turbulenzenergie k = <u′iu
′i>/2 verwendet. Ein Beispiel fur ein
1-Gleichungs-Modell ist das Spalart-Allmaras-Modell, bei dem allerdingskeine Transportgleichung fur die Turbulenzenergie, sondern eine Trans-portgleichung fur die Wirbelzahigkeit selbst gelost wird [Wil94].
(3) 2-Gleichungs-Turbulenzmodelle (k-ε-Modell)Bei diesen Modellen wird die Wirbelzahigkeit als Funktion von zwei Turbu-lenzgrossen dargestellt, fur die zusatzliche Transportgleichungen zu losensind. Ein weitverbreitetes 2-Gleichungsmodell ist das k-ε-Modell, bei demdie Wirbelzahigkeit aus der kinetischen Turbulenzenergie k und der tur-bulenten Energiedissipation ε berechnet wird gemass
νT = cµk2
ε. (6.11)
Fur ausreichend grosse Reynoldszahlen lauten die (modellierten) Trans-portgleichungen fur k und ε:
Dk
Dt=
∂
∂xi
(νT
σk
∂k
∂xi
)+ Pk − ε (6.12a)
Dε
Dt=
∂
∂xi
(νT
σε
∂ε
∂xi
)+ cε1
ε
kPk − cε2
ε2
k(6.12b)
Pk = νT
(∂<ui>
∂xj+∂<uj>
∂xi
)∂<ui>
∂xj. (6.12c)
Standardwerte fur die funf Konstanten in diesem Modell sind
cµ = 0.09 , cε1 = 1.44 , cε2 = 1.92 , σk = 1.0 , σε = 1.3 . (6.13)
29. November 2007
133 6 Turbulente Stromungen
Das k-ε-Modell in seiner hier angegebenen Form gilt nicht im Bereichniedriger Reynoldszahlen oder in der Nahe fester Wande, wo es modifiziertwerden muss.
Andere gebrauchliche 2-Gleichungsmodelle sind das k-ω-Modell und dask-τ -Modell, in denen anstelle der ε-Gleichung eine solche fur ω = ǫ/kbzw. fur ein turbulentes Zeitmass τ = 1/ω = k/ǫ gelost wird [Wil94,DR01] .
6.2.2 Reynoldsspannungs-Modelle (Second-Order Closures)
Die Beschreibung des Reynoldsspannungstensors −<u′iu′j> mit einer einzigenskalaren, isotropen Grosse νT ist in vielen Fallen unzulanglich (z. B. in Drall-stromungen oder rotierenden Stromungen). Bei Reynoldsspannungs-Modellenwerden deshalb aus den Navier-Stokes-Gleichungen hergeleitete Transportglei-chungen fur die sechs einzelnen Komponenten der Reynoldsspannung
∂
∂t(<u′iu
′j>) = ... (6.14)
zusammen mit den gemittelten Navier-Stokes-Gleichungen gelost. Da in diesenGleichungen aber wiederum unbekannte statistische Momente hoherer Ordnungauftreten (Tripelkorrelationen, Druck-Scher-Korrelationen), mussen auch hierzahlreiche Schliessungsannahmen getroffen werden, die nicht unproblematischsind. Fur nahere Einzelheiten wird auf die Literatur verwiesen [Wil94, DR01].
6.3 Grobstruktur-Simulation (Large-Eddy Simulation)
Man kann die Zahl der aufzulosenden Freiheitsgrade einer turbulenten Stromungreduzieren, indem man einen Tiefpassfilter auf die Losung ui der Navier-Stokes-Gleichungen anwendet
ui =
∫ ∫ ∫ui(x
′1, x
′2, x
′3) ·G(x1−x′1) ·G(x2−x′2) ·G(x3−x′3) · dx′1 dx′2 dx′3,
(6.15)
wobei man fur den Filterkern (filter kernel) G(x − x′), z. B. die Gaussfunktion
G(x − x′) =
√6
π∆2e−6(x−x′)2/∆2
(6.16)
Wintersemester 2007/2008
6.3 Grobstruktur-Simulation (Large-Eddy Simulation) 134
oder die Funktion
G(x − x′) =
1/∆ , |x− x′| ≤ ∆/20 , sonst
(6.17)
wahlt, mit ∆ als Filterweite.Fur raumlich homogene Filter wie (6.16), (6.17) sind Filteroperation
und Ableitungsoperationen kommutativ. Damit kann man die Navier-Stokes-Gleichungen fur die gefilterte Losung ui herleiten
∂ui
∂xi= 0 (6.18a)
∂ui
∂t+∂uiuj
∂xj+
1
ρ
∂p
∂xi= ν
∂2ui
∂x2j
− ∂τij∂xj
, (6.18b)
wobei der Term
τij = uiuj − uiuj , (6.19)
die Feinstrukturspannungen, d. h. die Wechselwirkung der Feinstruktur (subgrid-scales, SGS) mit der Grobstruktur (resolved scales) wiedergibt. Eine exakte Be-rechnung dieses Terms aus der Kenntnis von ui alleine ist nicht moglich. Manbenotigt vielmehr weitere Kenntnisse oder Annahmen, die dann zu sogenann-ten Feinstrukturmodellen (engl. subgrid-scale models) fuhren. Die Entwicklungund Verbesserung solcher Feinstrukturmodelle ist ein aktuelles Forschungsge-biet. Man beachte, dass die gefilterten Grossen ui(x, t) noch von Ort und Zeitabhangen und somit die Losung der LES-Gleichungen (6.18) in der Regel we-sentlich aufwendiger ist als die Losung der RANS-Gleichungen (6.3) fur diestatistisch gemittelten Grossen <ui>.
Einige einfache Feinstrukturmodelle sind nachfolgend dargestellt. Eineausfuhrliche Diskussion findet man in [Sag02].
(1) Smagorinsky-Modell [Sma63]:Ahnlich wie in Kapitel 6.2.1 wird der Wirbelzahigkeitsansatz (engl. eddy-viscosity ansatz) definiert als
τij −δij3τkk = −2νT Sij , (6.20)
mit der Scherrate
Sij =1
2
(∂ui
∂xj+∂uj
∂xi
). (6.21)
29. November 2007
135 6 Turbulente Stromungen
Es existieren verschiedene Modelle fur die Bestimmung der turbulentenWirbelviskositat νT . Fur das Smagorinsky-Modell wahlt man
νT = (CS∆)2|S| (6.22)
mit |S| = (2SijSij)1/2 und der zunachst unbekannten Smagorinsky-
Konstanten CS . Nimmt man ein Kolmogoroff-Spektrum mit einem k−5/3
Tragheitsbereich an, dann kann man CS abschatzen zu CS ≃ 0.18. Inder Praxis, insbesondere bei inhomogenen Stromungen (z. B. Grenzschich-ten), gibt dieses einfache Modell jedoch selten gute Ergebnisse, und CS
muss dem jeweiligen Stomungstyp empirisch angepasst und in Wandnahegedampft werden (siehe auch Kapitel 6.2.1).
(2) Dynamisches Smagorinsky-Modell [GPMC91]:Hier lasst man die Annahme fallen, dass CS raumlich und zeitlich kon-stant sei, verwendet aber den Wirbelzahigkeitsansatz (6.20) weiter undverbindet ihn mit dem Konzept eines dynamischen Koeffizienten. Um diedynamische Konstante CD abzuschatzen, fuhrt man einen weiteren Fil-ter ein mit einer grosseren Filterweite ∆, typischerweise ∆ = 2∆. Mannennt diesen Filter den Testfilter. Zwischen den GrobstrukturspannungenLij = uiuj − ˆui ˆuj und den Feinstrukturspannungen τij besteht unter
der Verwendung der Teststrukturspannungen Tij = uiuj − ˆui ˆuj die so-genannte Germano-Identitat [GPMC91]
Lij = Tij − τij . (6.23)
Man macht nun fur die Feinstrukturspannungen und die Teststruktur-spannungen denselben Ansatz
τij −δij3τkk = −2CD∆2|S|Sij =: −2CDβij (6.24a)
Tij −δij3Tkk = −2CD∆2| ˆS| ˆSij =: −2CDαij . (6.24b)
Damit kann man mit Hilfe der berechneten Grobstrukturspannungen Lij
nach einer Kontraktion der entstehenden uberbestimmten Tensorglei-chungen die Konstante CD bestimmen als
CD(x, t) = −1
2
Kij(αij − βij)
(αmn − βmn)(αmn − βmn), (6.25)
Wintersemester 2007/2008
6.3 Grobstruktur-Simulation (Large-Eddy Simulation) 136
wobei Kij = Lij − (δij/3)Lkk. Grundlegende Annahme ist hierbei, dassdie Testfilteroperation homogen in CD ist und derselbe Parameter CD
fur Teststrukturspannungen und Feinstrukturspannungen verwendet wer-den kann. Verglichen mit dem Smagorinsky-Modell zeigt das dynamischeModell deutlich verbesserte Ergebnisse bei inhomogenen Stromungen,benotigt aber in der Regel zusatzliche Modifikationen des ParameterfeldesC(x, t) (Mittelung in homogenen Koordinatenrichtungen, Abschneidennegativer Werte).
(3) Skalen-Ahnlichkeitsmodell (scale similarity model) [BFR83]:Dieses Modell basiert auf der Annahme, dass die Wechselwirkung zwi-schen Feinstruktur und Grobstruktur durch die Skalen nahe der Abschnei-dewellenzahl des Filters dominiert wird. Spaltet man die Feinstruktur vonui ab als u′i = ui − ui, so kann man die Feinstrukturkreuzspannungenmodellieren als
Cij = uiu′j + uju′i ≃ ¯uiu′j + ¯uju′i (6.26)
und die Feinstruktur-Reynoldsspannungen als
Rij = u′iu′j ≃ u′iu′j . (6.27)
Nach einigen Umformungen, der Einfuhrung einer Proportionalitatskon-stanten CB und durch Hinzufugen eines Wirbelzahigkeitsterms zur ver-besserten Beschreibung der Feinstrukturdissipation erhalt man folgendesModell fur die Feinstrukturspannungen
τij−δij3τkk = CB
(uiuj − ¯ui ¯uj −
δij3
(ukuk − ¯uk ¯uk)
)−2νT Sij . (6.28)
Mit CB ≃ 1 bis CB ≃ 1.1 liefert das Modell recht brauchbare Ergebnisse.Es ist aber mit νT = 0 unzureichend dissipativ.
[BFR83] J. Bardina, J. H. Ferziger, and W. C. Reynolds. Improved turbulencemodels based on large eddy simulation of homogeneous, incompres-sible, turbulent flows. Technical Report TF-19, Dept. of MechanicalEngineering, Stanford University, Stanford, California, 1983.
[DR01] P. A. Durbin and B. A. Pettersson Reif. Statistical Theory andModeling for Turbulent Flows. John Wiley & Sons, Chichester,2001.
29. November 2007
137 6 Turbulente Stromungen
[GPMC91] M. Germano, U. Piomelli, P. Moin, and W. H. Cabot. A dynamicsubgrid-scale eddy viscosity model. Phys. Fluids A, 3:1760–1765,1991.
[Pio97] U. Piomelli. Introduction to the modelling of turbulence. In vonKarman Institute Lecture Series 1997-03. von Karman Institute,1997.
[Pop00] S. B. Pope. Turbulent Flows. Cambridge University Press, 2000.
[Sad97] S. G. Saddoughi. Local isotropy in complex turbulent boundarylayers at high Reynolds number. J. Fluid Mech., 348:201–245, 1997.
[Sag02] P. Sagaut. Large-Eddy Simulation for Incompressible Flows. Sprin-ger, Berlin, 2002. 2nd edition.
[Sma63] J. Smagorinsky. General circulation experiments with the primitiveequations. Mon. Weath. Rev., 93:99–164, 1963.
[Wil94] D. C. Wilcox. Turbulence Modeling for CFD. DCW Industries, Inc.,La Canada, California, 1994.
Wintersemester 2007/2008

139
Kapitel 7
Lagrangesche Methoden
Unter Lagrangeschen Methoden versteht man solche, die von einem mit denFluidelement mitbewegten, also Lagrangeschen, Bezugssystem ausgehen. DieDiksretisierung erfolgt also nicht auf einem raumfesten oder beliebig bewegtenDiskretisierungsgitter, sondern durch Auswahl einer endlichen Zahl von Fluid-elementen, die eine endlich-dimensionale Reprasentation des gesamten betrach-teten Fluidvolumens darstellen.
In Lagrangescher Schreibweise sind die inkompressiblen Navier-Stokes-Gleichungen fur ein einphasiges Fluid mit konstanter Viskositat gegeben durch
Dρ
Dt= 0 (7.1a)
Dui
Dt= −1
ρ
∂p
∂xi+ ν
∂2ui
∂x2k
(7.1b)
dξidt
= ui , (7.1c)
wobei die letzt Gleichung die Bahnlinie des betrachteten Fluidelementes be-schreibt.
Man unterscheidet zwischen gitterfreien Methoden, z.B. der smoothed par-ticle hydrodynamics (SPH) oder den Wirbelmethoden (vortex methods) undgitterbasierten Methoden, z.B. particle in cell (PIC) oder Lattice-Boltzmann-Methoden (LBM). Bei PIC Methoden geschieht z.B. die Auswertung derPoisson-Gleichung auf einem Gitter, bei LBM wird die Bewegung der Fluidele-mente auf ein zugrundeliegendes Gitter beschrankt (zulassige Geschwindigkeitensetzten sich aus endlich vielen Geschwindigkeitsbasisvektoren mit vorgegebenerRichtung und Betrag zusammen).
Wintersemester 2007/2008
7.1 Lattice-Boltzmann-Methoden - LBM 140
7.1 Lattice-Boltzmann-Methoden - LBM
7.1.1 LBM fur die 2D inkompressiblen Navier-Stokes-Gleichungen
Der Name der Lattice-Boltzmann-Methoden ist historisch bedingt, da diese Me-thoden aus den sogenannten Lattice-Gas-Methoden entstanden sind. Lattice-Gas-Methoden bestehen aus einer gasdynamischen Beschreibung eines Fluids,bei dem die stochastische Bewegung von Gasmoleklen auf ein Gitter beschrnktist (Sprnge zwischen benachbarten Knoten) und die Bewegungsrichtung durchKollisionsregeln bestimmt wird. Man kann zeigen, dass solche Methoden imstatistischen Mittel eine Losung der Navier-Stokes-Gleichunge darstellen. Aller-dings sind dafur sehr hohe Punktanzahlen und eine hohe Zahl Stichproben notig,sodass diese Methoden fur realistische Stromungen vollig ungeeignet sind.
Die Auflosungsanforderungen sind reduziert worden, indem nicht Gasmolekulesondern numerische Partikel, die als Eigenschaft die Geschwindigkeitsvertei-lungsdichte f(~v, x; t) transportieren, eingfuhrt wurden. Nachwievor sind nurendlich viele Geschwindigkeitsvektoren ~qm, mit m = 0, . . . ,M zur Auswertungder Wahrscheinlichkeitsdichten zugelassen. Die makroskopische Dichte am Ort~x zur Zeit t erhalt man aus
ρ(~x, t) =
M∑
µ=0
fµ(~x, t) (7.2a)
den makroskopischen Impuls erhalt man aus
~m(~x, t) = ρ~u =M∑
µ=0
~qµfµ(~x, t) . (7.2b)
fµ kann formal als die statistische Geschwindigkeitsdichteverteilung fur dieGeschwindigkeit ~qµ interpretiert werden, was eine formale Anknupfung an dieBoltzmann-Gleichung erlaubt. Numerisch dienen die fµ als transformierte Va-riable fur ρ und ~u. Die Rechnung wird auf einem zugrundeliegenden kubi-schen oder hexagonalen (nur in 2D) Gitter durchgefuhrt. Zum Beispiel ist dasD2Q9 Gitter quadratisch in 2D und hat 9 Geschwindigkeitsvektoren ~q0 = [0, 0],~q1,3 = [±c, 0], ~q2,4 = 80,±c], ~q5,6,7,8 = [±c,±c]. Dabei ist c eine numerischeGeschwindigkeit, die als effektive Schallgeschwindigkeit interpretiert werdenkann. Da die entstehenden Gleichungen (s.u.) aber die inkompressiblen Navier-Stokes-Gleichungen approximieren, gilt keine thermodynamische Zustandsglei-
29. November 2007
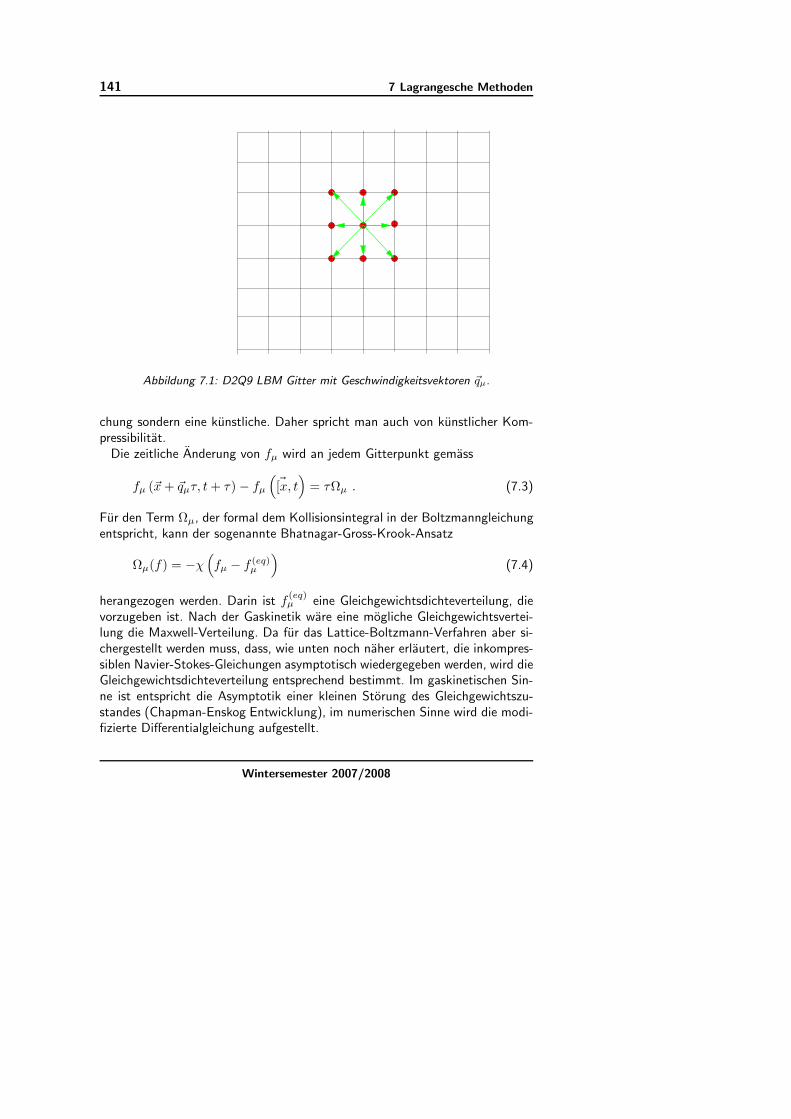
141 7 Lagrangesche Methoden
Abbildung 7.1: D2Q9 LBM Gitter mit Geschwindigkeitsvektoren ~qµ.
chung sondern eine kunstliche. Daher spricht man auch von kunstlicher Kom-pressibilitat.
Die zeitliche Anderung von fµ wird an jedem Gitterpunkt gemass
fµ (~x+ ~qµτ, t+ τ) − fµ
(~[x, t)
= τΩµ . (7.3)
Fur den Term Ωµ, der formal dem Kollisionsintegral in der Boltzmanngleichungentspricht, kann der sogenannte Bhatnagar-Gross-Krook-Ansatz
Ωµ(f) = −χ(fµ − f (eq)
µ
)(7.4)
herangezogen werden. Darin ist f(eq)µ eine Gleichgewichtsdichteverteilung, die
vorzugeben ist. Nach der Gaskinetik ware eine mogliche Gleichgewichtsvertei-lung die Maxwell-Verteilung. Da fur das Lattice-Boltzmann-Verfahren aber si-chergestellt werden muss, dass, wie unten noch naher erlautert, die inkompres-siblen Navier-Stokes-Gleichungen asymptotisch wiedergegeben werden, wird dieGleichgewichtsdichteverteilung entsprechend bestimmt. Im gaskinetischen Sin-ne ist entspricht die Asymptotik einer kleinen Storung des Gleichgewichtszu-standes (Chapman-Enskog Entwicklung), im numerischen Sinne wird die modi-fizierte Differentialgleichung aufgestellt.
Wintersemester 2007/2008

7.1 Lattice-Boltzmann-Methoden - LBM 142
Fur das oben skizzierte kubische, zweidimensionale Lattice-Boltzmann-Verfahren mit 9 Geschwindigkeiten D2Q9 erhalt man als Gleichgewichtsdichte-verteilungen
f(eq)µ00 =
4
9ρ
(1 − 3
2
~u2
c2
)(7.5a)
fµ=1,2,3,4 =1
9ρ
(1 + 3
~qµ · ~uc2
+9
2
~qµ · ~uc4
− 3
2
~u2
c2
)(7.5b)
fµ=5,6,7,8 =1
36ρ
(1 + 3
~qµ · ~uc2
+9
2
~qµ · ~uc4
− 3
2
~u2
c2
)(7.5c)
Mit diesen Gleichgewichtsdichteverteilungen hat das Lattice-Boltzmann-Verfahren eine Konsistenzordnung O(h2, τ2). Die asmyptotische Analyse zeigtaber auch, dass Reynoldszahl bzw. Viskositat und die numerischen Parameterc, χ und τ des LBM miteinander verknupft sind, gemass
1
Re=c2
3
(1
χ− τ
2
). (7.6)
e Damit ist das LBM Verfahren unter der Bedingung c = const konsistent.Fur endliche Zeitschrittweiten ist die tatsachliche Reynoldszahl kleine als diephysikalisch gegebene.
Schematisch kann der LBM-Algorithmus folgendermassen angegeben werden:
1. Anhand der Anfangsdaten ρ(~x, t = 0), u(~x, t = 0) werden die Gleich-gewichtsdichteverteilungen nach (7.5) bestimmt und die Anfangsdatenfur die zu berechnenden Dichteverteilungen werden gesetzt als fµ(~x, t =
0) = f(eq)µ (~x).
2. Die Dichteverteilungen zum neuen Zeitpunkt t+ τ werden gemass (7.3)und (7.4) berechnet.
3. Zum neuen Zeitpunkt t + τ werden Dichte ρ und Impuls ρ~u aus (7.2)rekonstruiert.
4. Anhand von ρ und ρ~u werden die Gleichgewichtsdichteverteilungen zumneuen Zeitpunkt t+ τ bestimmt.
5. Der nachste Zeitschritt wird nach Punkt 2 berechnet.
29. November 2007

143 7 Lagrangesche Methoden
Randbedingungen werden meist durch Ersetzen von (7.3) und (7.4) durch Re-flexionsregeln in den von Randern geschnittenen Zellen aufgepragt, sodass dieentsprechend (7.2) uberlagerten Geschwindigkeiten die gewunschten Randbe-dingungen erfullen.
Die Vorteile von LBM-verfahren sind, dass sie trivial parallelisierbar sind (Lo-kalitat), komplexe geometrische Randbedingungen konnen wegen der einfachenKontrolle uber (7.2) leicht uufgepragt werden und insbesondere konnen kom-plexe Geometrien auf kartesischen Gittern mit eingebetteten Verfeinerungendargstellt werden. Dieser Punkt fuhrt zu dramatischen Zeiteinsparungen bei derErstellung von Rechengittern fur komplexe Geometrien im Vergleich zu struk-turangepassten Rechengittern, die ansonsten meist verwendet werden.
Ein Nachteil von LBM-Verfahren ist, dass die effektive physikalischen Visko-sitat bzw. Reynoldszahl von den Diskretisierungsparametern c, τ und χ abhangt.Ausserdem sind LBM-Verfahren inharent instationar und weisen infolge desTransports der Dichteverteilungen auf einem Gitter mit festen Geschwindigkei-ten ein numerisches Rauschen auf, das durch eine Mittelung uber kleine Zeitin-tervalle beseitigt werden muss, die Wahl dieser Zeitintervalle ist aber beliebig.LBM-Verfahren sind kunstlich kompressibel, d.h. auch fur eine inkompressibleStromung treten zeitliche materielle Dichtefluktuationen auf. Die Formulierungvon LBM lasst bisher nur eine Turbulenzmodellierung auf dem Niveau von Zwei-gleichungsmodellen zu.
7.1.2 Analyse eines LBM-Verfahrens fur die viskose Burgers -Gleichung
Die viskose Burgers-Gleichung lautet
∂u
∂t+
1
2
∂
∂x
(u2
2− ν
∂2u
∂x2
)= 0 (7.7)
Das D1Q2 LBM Verfahren fur diese Gleichung geht von den Geschwindigkeitenq0 = −c und q1 = c aus. Daraus lassen sich gemass (7.2) fur die Burgers-Gleichung folgende Bedingungen fur u und f(u) herleiten
f0 + f1 = u (7.8a)
f0q0 + f1q1 = f(u) =u2
2− ν
∂u
∂x. (7.8b)
Wintersemester 2007/2008

7.2 Smooth Particle Hydrodynamics - SPH 144
Mit dem Ansatz f(eq)0,1 = β1upγ1u
2 fur die zugehorigen Gleichgewichtsdich-teverteilungen erhalt man unter der Berucksichtigung, dass fur die Burgers-Gleichung der Gleichgewichtszustand ∂u
∂x = 0 bedeutet
f(eq)0 =
1
2
(u− 1
2cu2
)(7.9a)
f(eq)1 =
1
2
(u+
1
2cu2
). (7.9b)
Durch Einsetzen von (7.8) und (7.9) in die zu (7.3) und (7.4) entsprechendenGleichungen
fn+10,j−1 = fn
0,j − τχ(fn0,j − f
(eq) n0,j
)(7.10a)
fn+11,j+1 = fn
1,j − τχ(fn1,j − f
(eq) n1,j
)(7.10b)
und nach Einsetzen von Taylorentwicklungen fur unj±j , u
n+1j und ∂u
∂x
∣∣nj±1
an
den jeweiligen Grossen in j, n erhalt man die modifizierte Differentialgleichung
∂u
∂t+
1
2
∂u2
∂x= ν(1 − τχ)
∂2u
∂x2+ · · · , (7.11)
wobei c = τ/h gesetzt wurde. Diese zeigt, dass die effektive Diffusion durchν(1 − τχ) dargestellt wird und das Verfahren somit nur konsistent unter derBedingung τχ → 0 fur τ → 0 ist.
7.2 Smooth Particle Hydrodynamics - SPH
[CHQZ88] C. Canuto, M. Y. Hussaini, A. Quarteroni, and T. A. Zang. SpectralMethods in Fluid Dynamics. Springer, Berlin, Germany, 1988.
[CM93] A. J. Chorin and J. E. Marsden. A Mathematical Introduction toFluid Mechanics. Springer-Verlag, New York, 3 edition, 1993.
[DFM02] M. O. Deville, P. F. Fischer, and E. H. Mund. High-Order Me-thods for Incompressible Fluid Flow. Cambridge University Press,Cambridge, 2002.
29. November 2007
145 7 Lagrangesche Methoden
[Fle91] C. A. J. Fletcher. Computational Techniques for Fluid Dynamics.Springer, Berlin, 1991.
[FP02] J. H. Ferziger and M. Peric. Computational Methods for FluidDynamics. Springer, Berlin, 2002.
[GR94] C. Grossmann and H.-G. Roos. Numerik partieller Differentialglei-chungen. Teubner, Stuttgart, 1994.
[Hin75] J. O. Hinze. Turbulence. McGraw Hill, New York, 2nd edition, 1975.
[Hir90] C. Hirsch. Numerical Computation of Internal and External Flows.John Wiley & Sons, Chichester, 1990.
[HNW87] E. Hairer, S. P. Nørsett, and G. Wanner. Solving Ordinary Differen-tial Equations, volume I. Nonstiff Problems. Springer Verlag, Berlin,1987.
[Joh87] C. Johnson. Numerical Solution of Partial Differential Equations bythe Finite Element Method. Cambridge University Press, Cambridge,1987.
[KL89] H.-O. Kreiss and J. Lorenz. Initial-Boundary Value Problems andthe Navier-Stokes Equations. Academic Press Inc., London, 1989.
[LeV92] R. J. LeVeque. Numerical Methods for Conservation Laws.Birkhauser, Basel, 2nd edition, 1992.
[PT83] R. Peyret and Th. D. Taylor. Computational Methods for FluidFlow. Springer-Verlag, New York, 1983.
[PTVF92] W. H. Press, S. A. Teukolsky, W. T. Vetterling, and B. P. Flanne-ry. Numerical Recipes in Fortran 77. Cambridge University Press,Cambridge, 1992.
[RM65] R. D. Richtmyer and K. W. Morton. Difference Methods for Initial-Value Problems. John Wiley & Sons, New York, 2nd edition, 1965.
[Sch82] H. Schlichting. Grenzschicht-Theorie. Verlag G. Braun, 8th edition,1982.
[Sch99] M. Schafer. Numerik im Maschinenbau. Springer, Berlin, 1999.
Wintersemester 2007/2008
7.2 Smooth Particle Hydrodynamics - SPH 146
[Str89] J. C. Strikwerda. Finite Difference Schemes and Partial DifferentialEquations. Wadsworth & Brooks/Cole, Belmont, 1989.
[TAP97] J. C. Tannehill, D. A. Anderson, and R. H. Pletcher. ComputationalFluid Dynamics and Heat Transfer. Taylor & Francis, Washington,London, 2nd edition, 1997.
[VM95] H. K. Versteeg and W. Malalasekera. An Introduction to Compu-tational Fluid Dynamics – The Finite Volume Method. Longman,Essex, 1995.
[Wen96] J. F. Wendt. Computational Fluid Dynamics: An introduction.Springer, Berlin, 1996.
[Wes01] P. Wesseling. Principles of Computational Fluid Dynamics. Springer,Berlin, 2001.
29. November 2007
147
Kapitel 8
Ubungsaufgaben
8.1 Rundungsfehler
8.1.1 Aufgabe
Anhand einer zentralen Differenzenformel fur die erste Ableitung soll der Run-dungsfehlereinfluss und die Fehlerfortpflanzung infolge endlicher Zahldarstellunguntersucht werden.Problem :Die erste Ableitung einer Funktion kann approximiert werden durch eine zentraleDifferenzenformel
f ′num(x) =
f(x+ ∆x) − f(x− ∆x)
2∆x.
Aufgaben:(a) Zeigen Sie, dass fur die Addition zweier Zahlen x und y mit den relativenFehlern εx und εy die Fehlerfortpflanzung gegeben ist durch
ε+ =x
x+ yεx +
y
x+ yεy .
Anleitung : Benutzen Sie fur f(x, y) = x+y die sich aus dem totalen Differentialergebende allgemeine Fortpflanzungsformel
εf =
n∑
j=1
xj
f
∂f
∂xjεxj
.
(b) Bestimmen Sie fur die Funktion f(x) = ex den relativen Fehler ε der obigenApproximationsformel
ε =|f ′(x) − f ′
num(x)||f ′(x)|
Wintersemester 2007/2008

8.2 Typ von Differentialgleichungen 148
and der Stelle x = 2. Verwenden Sie die Schrittweiten ∆x =10−15, 10−14, . . . , 10−1, 0.3, 0.5. Vergleichen Sie die Ergebnisse fur Rechnun-gen mit einfacher Genauigkeit (REAL) und doppelter Genauigkeit (DOUBLEPRECISION), und stellen Sie das Ergebnis graphisch in einem doppelt logarith-mischen Diagramm dar (ε uber 1/∆x).(c) Gegeben sind folgende Abschatzungen fur den relativen Diskretisierungsfeh-ler
Ed =∆x2f ′′′(x)
6f ′(x)
und fur den Fortpflanzungsfehler
Er =δf(x)
∆xf ′(x).
Finden Sie den Ausdruck fur dasjenige ∆xmin, fur welches der Gesamtfehler
Eg = Er + Ed
als Funktion von ∆x minimal wird. Geben Sie einen Zahlenwert fur ∆xmin anfur die obengenannte Beispielfunktion ausgewertet in x = 0 fur SINGLE (δ ≃10−7) und DOUBLE PRECISION (δ = 10−16). Vergleichen Sie Ihr Resultatmit den Ergebnissen aus (b).
8.2 Typ von Differentialgleichungen
8.2.1 Aufgabe
Gegeben sind die eindimensionalen Flachwassergleichungen in den Variablenv(x, t) (Geschwindigkeit) und φ(x, t) (potentielle Energie), φ > 0
∂u
∂t+∂F
∂x= 0 (8.1)
mit dem Losungsvektor
u =
[vφ
](8.2)
29. November 2007
149 8 Ubungsaufgaben
und der Vektorfunktion
F (u) =
[v2/2 + φ
vφ
], (8.3)
Aufgaben:
(a) Leiten Sie die quasilineare Matrixform
∂u
∂t+A
∂u
∂x= 0 (8.4)
her (d.h. bestimmen Sie die Matrix A). Nutzen Sie hierbei aus, dass F nichtexplizit von x und t abhangt.
(b) Zeigen Sie, dass das partielle Differentialgleichungssystem (8.4) hy-perbolisch ist.Hilfe : Benutzen Sie folgende Definition. Ein System der Form (8.4) mit mKomponenten heisst hyperbolisch, wenn A m reelle Eigenwerte und m linearunabhangige Eigenvektoren hat.
(c) Linearisieren Sie Gl. (8.4), d.h. nehmen Sie A als unabhangig von xund t an. Geben Sie die Losung dieses linearisierten Problems in allge-meiner Form an fur eine beliebige Anfangsbedingung v(x, 0) = v0(x) undφ(x, 0) = φ0(x).
8.3 Fouriertransformation
8.3.1 Aufgabe
Gegeben ist Sagezahnfunktion
f(x) =1
2(π − x) , 0 < x ≤ 2π , f(x) = f(x+ 2π) . (8.5)
Die Fourierreihendarstellung von f(x) ist gegeben durch
f(x) =1√2π
∞∑
k=−∞
f(k)eikx (8.6)
Wintersemester 2007/2008
8.4 Finite-Volumen-Methode 150
mit den Fourierreihenkoeffizienten
f(k) =1√2π
∫ 2π
0
e−ikxf(x)dx . (8.7)
Aufgaben:
(a) Zeigen Sie, dass f(x) =∑∞
k=1sin kx
k .
(b) Die bei k = N abgebrochene Reihe wird mit fN (x) bezeichnet. SchreibenSie ein Programm, welches den Fehler |f(x) − fN(x)| an x = 0, 0.01, 0.1, 0.2berechnet und stellen Sie diese Fehler dar in einem doppeltlogarithmischenDiagramm fur N = 2, 4, 8, 16, 32, 64, 128, 256. Was konnen Sie uber dieKonvergenzrate (d.h. die Abnahme des Fehlers mit zunehmendem N) an denverschiedenen Stellen sagen ?Anmerkung : benutzen Sie doppelte Genauigkeit im Programm.
8.4 Finite-Volumen-Methode
8.4.1 Aufgabe
Gegeben sei ein zweidimensionales Erhaltungsgesetz fur die Variable u in inte-graler Form
∫
Ω
∂u
∂tdΩ +
∫
Ω
(∂F
∂x+∂G
∂y
)dΩ = 0 . (8.8)
Im Unterschied zu Finite-Differenzen-Verfahren, bei denen die differentielleForm approximativ gelost wird, wird bei der Finite-Volumen-Methode die in-tegrale Form direkt diskretisiert.
29. November 2007

151 8 Ubungsaufgaben
C
CCCCCCCCCCCXXXXXXXXXXXX
HHHY
AAAK
:
A
D
C
B
n
n
n
n
Betrachtet man eine Rechenzelle ABCD und fuhrt man
u =1
VABCD
∫
Ω
udΩ (8.9)
ein, so erhalt man
VABCD∂u
∂t= −
(∮
ABCD
Fdy −∮
ABCD
Gdx
), (8.10)
wobei VABCD =∫ΩdΩ.
Wir reduzieren nun die allgemeine Betrachtung auf ein kartesisches Gitter mitje konstanten Maschenweiten ∆x und ∆y.
Wintersemester 2007/2008
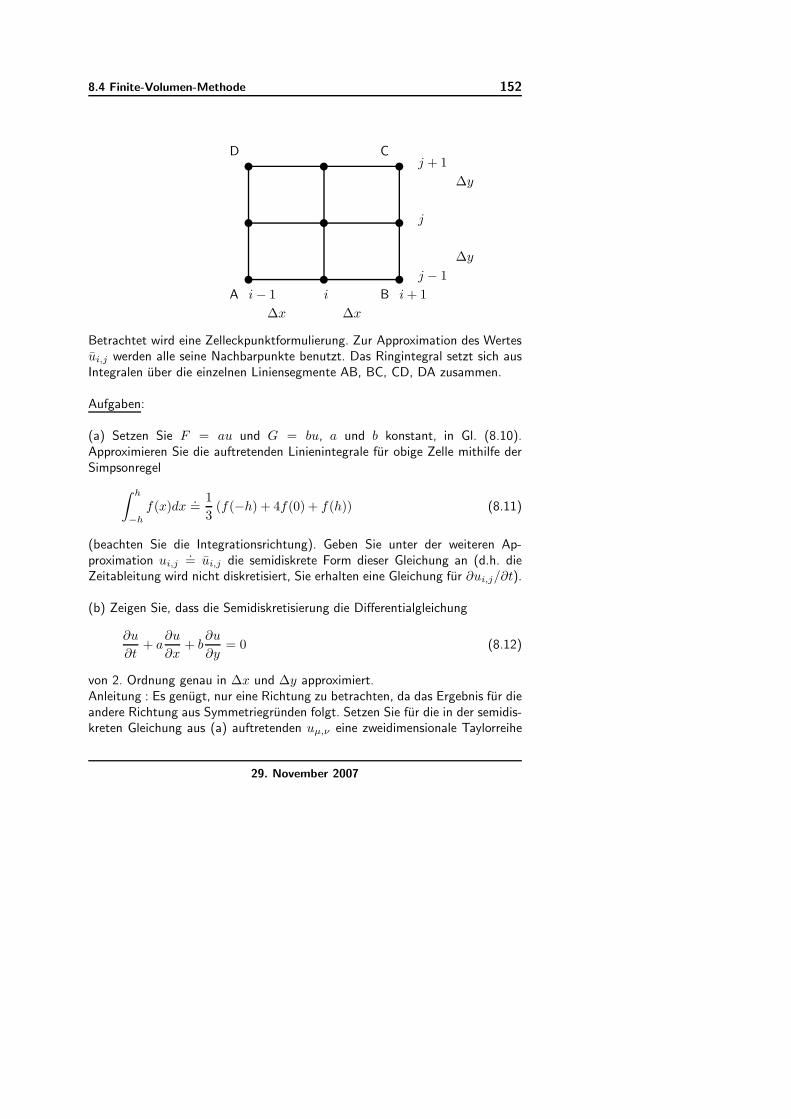
8.4 Finite-Volumen-Methode 152
u u u
u u u
u u u
j − 1
j
j + 1
i− 1 i i+ 1
∆x ∆x
∆y
∆y
A B
D C
Betrachtet wird eine Zelleckpunktformulierung. Zur Approximation des Wertesui,j werden alle seine Nachbarpunkte benutzt. Das Ringintegral setzt sich ausIntegralen uber die einzelnen Liniensegmente AB, BC, CD, DA zusammen.
Aufgaben:
(a) Setzen Sie F = au und G = bu, a und b konstant, in Gl. (8.10).Approximieren Sie die auftretenden Linienintegrale fur obige Zelle mithilfe derSimpsonregel
∫ h
−h
f(x)dx.=
1
3(f(−h) + 4f(0) + f(h)) (8.11)
(beachten Sie die Integrationsrichtung). Geben Sie unter der weiteren Ap-proximation ui,j
.= ui,j die semidiskrete Form dieser Gleichung an (d.h. die
Zeitableitung wird nicht diskretisiert, Sie erhalten eine Gleichung fur ∂ui,j/∂t).
(b) Zeigen Sie, dass die Semidiskretisierung die Differentialgleichung
∂u
∂t+ a
∂u
∂x+ b
∂u
∂y= 0 (8.12)
von 2. Ordnung genau in ∆x und ∆y approximiert.Anleitung : Es genugt, nur eine Richtung zu betrachten, da das Ergebnis fur dieandere Richtung aus Symmetriegrunden folgt. Setzen Sie fur die in der semidis-kreten Gleichung aus (a) auftretenden uµ,ν eine zweidimensionale Taylorreihe
29. November 2007
153 8 Ubungsaufgaben
in x und y an der Stelle (i, j) an (brechen Sie die Reihe nach den zweiten Ablei-tungen ab). Zweckmassig ist eine Tabelle anzulegen, welche eine Zeile fur jedenPunkt und eine Spalte fur jedes Taylorreihenglied enthalt. Tragen Sie dann indie Spalten die jeweiligen Taylorreihenkoeffizienten ein. Spaltenweises Aufsum-mieren zeigt, dass Fehlerglieder bis einschliesslich zweiter Ordnung herausfallen.
(c) Schreiben Sie ein Programm zur Losung der linearen Advektionsglei-chung
∂u
∂t+∂u
∂x+∂u
∂y= 0 (8.13)
auf dem Bereich [0, 2π]×[0, 2π] mit dem Verfahren aus (a). Setzen sie in x und yperiodische Randbedingungen an und wahlen Sie die Anfangslosung u(x, y, 0) =cos(x + y). Fur die Zeitintegration verwenden Sie das Runge-Kutta-Verfahren3. Ordung, welches in der Vorlesungsunterlage angegeben ist. Zerlegen Sie denDefinitionsbereich in N × N = 20 × 20, 40 × 40 und 80 × 80 aquidistanteTeilbereiche und integrieren Sie die Losung mit jeder Diskretisierung bis t = 0.5(wahlen Sie eine Zeitschrittweite ∆t = ∆x/(4π) = ∆y/(4π)).
Bestimmen Sie die Approximationsordnung des Verfahrens aus dem Abkling-verhalten des Fehlers
E =
√∑N+1i,j=1(u(i, j) − uex(i, j))2
(N + 1)2(8.14)
uber N (uex = cos(2t−x−y)). Wie erklaren Sie sich, dass das Fehlerverhaltenvon der raumlichen Diskretisierung dominiert wird ?
Bemerkung :
Wenn Sie in Teil (a) anstelle der Simpsonregel eine Trapezregel verwen-det hatten, wurden Sie ein aquivalentes Finite-Differenzen Verfahren 2.Ordnung zur Diskretisierung der Differentialform der Erhaltungsgleichungbekommen.
Wintersemester 2007/2008

8.5 Finite-Elemente-Methode 154
8.5 Finite-Elemente-Methode
8.5.1 Aufgabe
Gegeben sei ein Randwertproblem bestehend aus der gewohnlichen linearenDifferentialgleichung
d2u
dx2+ u = 0 , 0 ≤ x ≤ π (8.15)
und den Randbedingungen
u(0) = 1 ,du
dx|x=π = 1 . (8.16)
Aufgaben :
(a) Bestimmen Sie die exakte Losung uex(x) dieses Randwertproblems.
(b) Geben Sie die nach dem Finite-Elemente-Galerkin-Verfahren mit li-nearen Lagrange-Elementen diskretisierte Form A u = b des Randwertproblemsan.Anleitung :Diskretisieren Sie das Intervall 0 ≤ x ≤ π aquidistant mit der Schrittweite h inN Teilintervalle. Setzen Sie an :
u(x).= u(x) =
N∑
j=0
ujφj(x) , (8.17)
mit
φj(x) =
x−xj−1
h , xj−1 < x < xjxj+1−x
h , xj+1 ≥ x ≥ xj
0 , sonst
, (8.18)
wobei j = 0, . . . , N . Gehen Sie aus von der MWR-Form des Randwertproblemsfur u. Beachten Sie, dass die Ansatzfunktionen eine triviale zweite Ableitungbesitzen, formen Sie die MWR-Gleichung entsprechend um (partielle Integrati-on), wodurch Sie einen expliziten Randterm in der MWR-Gleichung erhalten.Fuhren Sie dann die Projektion auf den Funktionenraum φi , i = 0, . . . , N
29. November 2007
155 8 Ubungsaufgaben
durch. Sie erhalten Integrale der Art∫ π
0 φ′iφ′jdx und
∫ π
0 φiφjdx, welche dieElemente der Matrix A bilden. Rechnen Sie diese Elemente aus. Sie erhalten einnichthomogenes lineares Gleichungssystem der Dimension (N + 1) × (N + 1).Die rechte Seite b enthalt Komponenten resultierend aus der Randbedingung.Berucksichtigen Sie nun, dass der Randwert u0 bekannt ist und eliminierenSie die entsprechende Zeile des Gleichungssystems. Sie erhalten ein linearesGleichungssystem der Dimension N ×N mit einer an einer Stelle verandertenrechten Seite b.
(c) Schreiben Sie ein Programm zur Auflosung des linearen Gleichungs-systems aus (b). Nutzen Sie hierbei den Thomas-Algorithmus zur Auflosungeines tridiagonalen Gleichungssystems. Berechnen Sie den L2-Fehler nach derFormel
EL2=
(1
N + 1
N∑
i=0
(uex(xi) − ui)2
) 12
. (8.19)
Stellen Sie EL2fur N = 5, 10, 20, 40, 80 geeignet graphisch dar, und ermitteln
Sie die Konvergenzordnung.
8.6 Diskretisierungsverfahren fur die Advektionsgleichung
8.6.1 Aufgabe
Fur x ∈ [−1, 3] und t ∈ [0, 2.4] lose die Advektionsgleichung
∂tu+ ∂xu = 0 (8.20)
mit der Anfangsbedingung
u(x, 0) =
cos2(πx) ,wenn |x| ≤ 0.5
0 , sonst(8.21)
Randbedingungen sind gegeben als
u1(−1, t) = 0 . (8.22)
Verwende die folgenden Diskretisierungsverfahren:
Wintersemester 2007/2008
8.6 Diskretisierungsverfahren fur die Advektionsgleichung 156
(a) Forward-Time Backward-Space mit λ = ∆t/∆x = 0.8 und ∆x =0.1, 0.05, 0.025,
(b) Forward-Time Central-Space mit λ = 0.8 und ∆x = 0.1, 0.05, 0.025,
(c) Lax-Friedrichs mit λ = 0.8, 1.6 und ∆x = 0.1, 0.05, 0.025,
(d) Leapfrog mit λ = 0.8 und ∆x = 0.1, 0.05, 0.025.
Fur die Schemata (b),(c) und (d) verwende am rechten Rand das Schemaun+1
N = un+1N−1, mit xN = 3. Fur Schema (d) verwende Schema (b), um die
Losung fur n = 1 zu berechnen.
Fur jedes Schema stelle fest, ob es”brauchbar“ oder
”unbrauchbar“ ist. Nur
im Rahmen dieser Ubung bezeichnen wir ein Schema als”unbrauchbar“, wenn
|unj | grosser als 5 fur irgendwelche j, n wird. Als
”brauchbares“ Schema bezeich-
nen wir es, wenn die Losung wie eine vernunftige Approximation der Losungder Differentialgleichung aussieht. Stelle verschiedene Losungen zu dem letztenberechneten Zeitpunkt dar. Was stellst Du fest bezuglich der Zeit, zu der die
”unbrauchbaren“ Schemata
”explodieren“, wenn ∆x verkleinert wird ? Kann
man gemeinsame Verhaltensmuster der”unbrauchbaren“ Losungen beobach-
ten ? Wie verhalt sich der Fehler der”brauchbaren“Losungen, wenn man ∆x
verkleinert, d.h. wenn man ∆x halbiert, um welchen Faktor verander sich derFehler ?
8.6.2 Losung
8.6.2.1 FTBS
Diskretisierungsschema ist:
un+1j − un
j
τ+un
j − unj−1
h= 0 . (8.23)
Besonderheiten bezuglich der Randbedingung treten nicht auf, da u0 gegebenist. Formale Konsistenzordnung ist O(τ, h). Fur h = 0.1 bestimmt man einenL2-Fehler von E = 0.3094, fur h = 0.05 ist E = 0.1888 und fur h = 0.025ist E = 0.1055. Daraus ergibt sich eine Schatzung fur die Konvergenzordnungnach p = log(Eh/Eh/2)/log2 von 0.71 bzw. 0.84. Fur alle h wird ein sinnvollesErgebnis berechnet.
29. November 2007
157 8 Ubungsaufgaben
8.6.2.2 FTCS
Diskretisierungsschema ist:
un+1j − un
j
τ+un
j+1 − unj−1
2h= 0 . (8.24)
Dieses Schema braucht eine numerische Randbedingung in j = N , da uN+1
unbekannt ist. Hier wahlen wir un+1N = Un+1
N−1, da die Rechnung abgebrochenwird, bevor die Anfangsbedingung durch den rechten Rand konvektiert wird.Formale Konsistenzordnung ist O(τ, h2). Fur kein h bekommt man ein brauch-bares Ergebnis.
8.6.2.3 Lax-Friedrichs
Diskretisierungsschema ist:
un+1j − un
j+1−unj−1
2
2τ+un
j+1 − unj−1
2h= 0 . (8.25)
Dieses Schema braucht eine numerische Randbedingung in j = N , da uN+1
unbekannt ist. Formale Konsistenzordnung ist O(τ, h). Fur h = 0.1 bestimmtman einen L2-Fehler von E = 0.4758, fur h = 0.05 ist E = 0.3315 und furh = 0.025 ist E = 0.2064. Daraus ergibt sich eine Schatzung fur die Konver-genzordnung nach p = log(Eh/Eh/2)/log2 von 0.52 bzw. 0.68. Fur alle h wirdein sinnvolles Ergebnis berechnet.
8.6.2.4 Leap-Frog
Diskretisierungsschema ist:
un+1j − un−1
j
2τ+un
j+1 − unj−1
2h= 0 . (8.26)
Dieses Schema braucht eine numerische Randbedingung in j = N , da uN+1
unbekannt ist. Ausserdem wird in n = 0 noch eine numerische Anfangsbe-dingung benotigt, da u−1
j unbekannt ist. Der erste Zeitschritt wird daher mit
einem FTCS Schema durchgefuhrt. Formale Konsistenzordnung ist O(τ2, h2).Fur h = 0.1 bestimmt man einen L2-Fehler von E = 0.1813, fur h = 0.05ist E = 0.0706 und fur h = 0.025 ist E = 0.0333. Daraus ergibt sich eine
Wintersemester 2007/2008
8.6 Diskretisierungsverfahren fur die Advektionsgleichung 158
Schatzung fur die Konvergenzordnung nach p = log(Eh/Eh/2)/log2 von 1.36bzw. 1.08. Fur alle h wird ein sinnvolles Ergebnis berechnet. Die theoretischeKonvergenzordnung wird durch die numerische Randbedingung reduziert.
8.6.2.5 Programmliste
! discretization for one−way wave equation
! ! du/dt + du/dx = 0
! ! Initial condition:
! | cos**2(pi*x); for |x|<= 0.5
! u(0,x) = |
! | 0 ; elsewhere
! ! Boundary condition:
! ! u(t,−1) = 0
! ! 27.04.2000
!−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
PROGRAM
disc
r
!−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
!−Declarations−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
!−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
IMPLICIT NONE
INTEGER, PARAMETER :: DOUBLE = SELECTED_REAL_KIND(15,307)
INTEGER, PARAMETER :: lo_int = SELECTED_INT_KIND(9)
INTEGER(lo_int) :: n,j,xnodes,tnodes,al_status,deal_status
REAL(DOUBLE), ALLOCATABLE, DIMENSION(:) :: U,Un,Uo,Uexact,errabs
REAL(DOUBLE) :: pi,xstart,xend,deltax,tstart,tend,deltat
REAL(DOUBLE) :: x,t,lambda,max_errabs
character(*) mode
parameter (mode = ’
lp’)
!−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
!−Initializations and allocations−−−−−−−−−−−−−−−−−−−−−−−−−
!−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
pi = ACOS(−1.0)
xstart = −1.0
xend = 3.0
deltax = 0.1 !!! check for deltax = 0.1, 0.05, 0.025 !!!
xnodes = INT(ABS(xend−xstart)/deltax + 1.1)
tstart = 0.0
tend = 2.4
lambda = 0.8
deltat = lambda * deltax
tnodes = INT(ABS(tend−tstart)/deltat +0.01)
! tnodes = 5
WRITE(*,*)’
xnod
es =
’,xnodes
WRITE(*,*)’
tnod
es =
’,tnodes
ALLOCATE(U(xnodes),Un(xnodes),Uexact(xnodes), &
& Uo(xnodes),errabs(xnodes),STAT=al_status)
IF (al_status /= 0) THEN
WRITE(*,*)’
An
erro
r occ
urre
d w
hile
allo
catin
g dy
nam
ic fi
elds
!’ STOP ’
EX
EC
UT
ION
AB
OR
TE
D’
Nov
23,
05
9:15
Sei
te 1
/3Discr.f9
0 END IF
!−−− Uo(n=0,j); initial value
Uo(:) = 0.0
DO j=1,xnodes
x = xstart + (j−1)*deltax
IF (ABS(x) <= 0.5)THEN
Uo(j) = (COS(pi*x))**2
END IF
WRITE(20,’
(2E
20.1
0)’) x, Uo(j)
END DO
U(:) = Uo
U(xnodes) = U(xnodes−1)
!−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
!−Time−loop to step the solution forward in time−−−−−−−−−−
!−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
DO n=1,tnodes
!−−− Boundary condition for every time step
Un(1) = 0.0
!−−− Overwrite U(n,j) with U(n+1,j)
! Forward−Time Backward−Space scheme
if (mode .eq. ’
ftbs’) then
DO j=2,xnodes
Un(j) = U(j) − lambda*(U(j) − U(j−1))
END DO
! Forward−Time Center−Space scheme
else if (mode .eq. ’
ftcs’) then
DO j=2,xnodes−1
Un(j) = −0.5*lambda*U(j+1) + U(j) + 0.5*lambda*U(j−1)
END DO
else if (mode .eq. ’
lf’) then
! Lax−Friedrichs scheme
DO j=2,xnodes−1
Un(j) = 0.5*(U(j−1)+U(j+1)) + 0.5*lambda*(U(j−1)−U(j+1))
END DO
else if (mode .eq. ’
lp’) then
! Leapfrog scheme
if (n .eq. 1) then
DO j=2,xnodes−1
Un(j) = Uo(j) − 0.5*lambda*(U(j+1) − U(j−1))
END DO
else
DO j=2,xnodes−1
Un(j) = Uo(j) − lambda*(U(j+1) − U(j−1))
END DO
end if
end if
if (mode .ne. ’
ftbs’) then
Un(xnodes) = Un(xnodes−1)
Nov
23,
05
9:15
Sei
te 2
/3Discr.f9
0
Ged
ruck
t von
Nik
olau
s A
. Ada
ms
Don
ners
tag
Nov
embe
r 29,
200
71/
2D
iscr
.f90
29. November 2007
159 8 Ubungsaufgaben
end if
!−−− Shift Uo and U by one for the next time step
Uo(:) = U(:)
U(:) = Un(:)
!−−− Write U(n,j) to file fort.20
! WRITE(20,*) ’&’
DO j=1,xnodes
x = xstart + (j−1)*deltax
IF(n==tnodes)THEN
WRITE(20,’
(2E
20.1
0)’) x, U(j)
ENDIF
IF (ABS(U(j))>5.0)THEN
t = tstart + n*deltat
WRITE(*,*) ’
Loe
sung
ist u
nbra
uchb
ar.’
WRITE(*,*) ’
n = ’,n,’
(t =
’,t,’
); j
= ’,j,’
(x =
’,x,’
)’ END IF
END DO
END DO
!−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
!−Calculate max absolute error at t=2.4 (n=tnodes)−−−−−−−−
!−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
max_errabs = 0.0
Uexact(:) = 0.0
t = tstart + tnodes*deltat
DO j=1,xnodes
x = xstart + (j−1)*deltax
IF((x−t)> −1.0 .AND. ABS(x−t)<0.5)THEN
Uexact(j) = (COS(pi*(x−t)))**2
END IF
WRITE(40,’
(2E
20.1
0)’)x, Uexact(j)
errabs(j) = ABS(U(j)−Uexact(j))
WRITE(30,’
(2E
20.1
0)’)x, errabs(j)
max_errabs = MAX(max_errabs,errabs(j))
ENDDO
WRITE(*,*) ’
max
_err
abs
= ’, max_errabs
DEALLOCATE( U,Un,Uo,Uexact,errabs,STAT=deal_status)
END PROGRAM
disc
r
Nov
23,
05
9:15
Sei
te 3
/3Discr.f9
0
Ged
ruck
t von
Nik
olau
s A
. Ada
ms
Don
ners
tag
Nov
embe
r 29,
200
72/
2D
iscr
.f90
Wintersemester 2007/2008
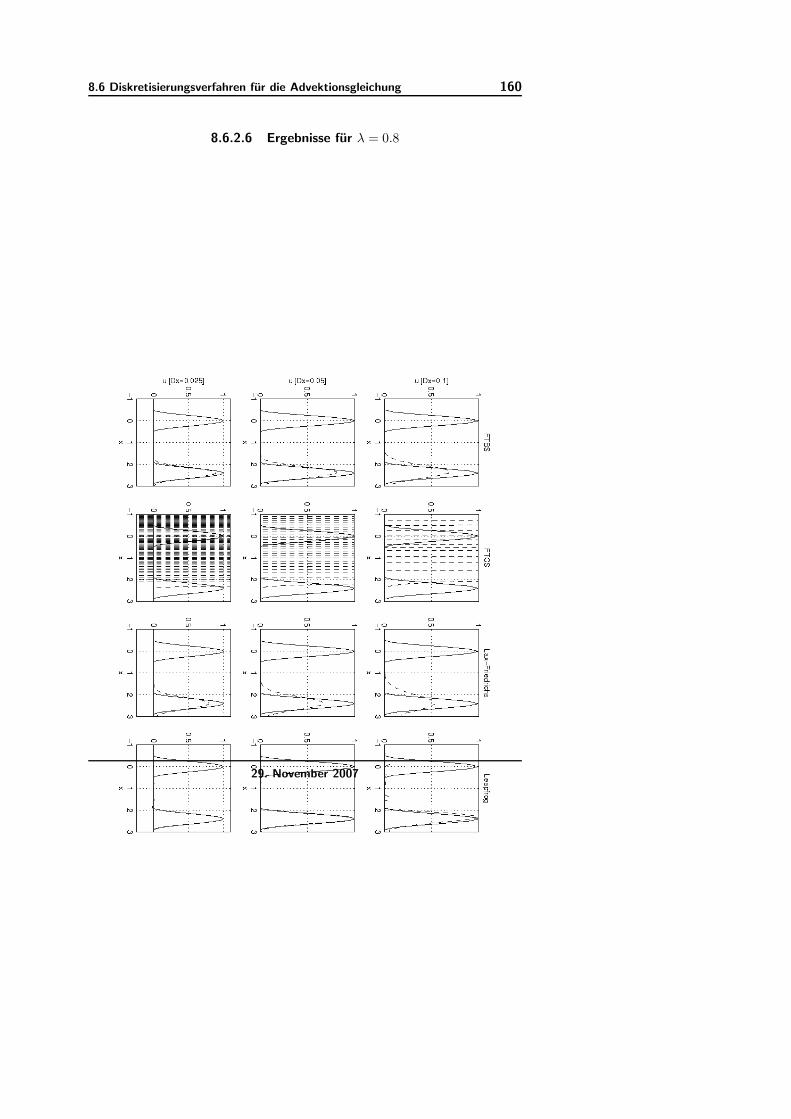
8.6 Diskretisierungsverfahren fur die Advektionsgleichung 160
8.6.2.6 Ergebnisse fur λ = 0.8
29. November 2007
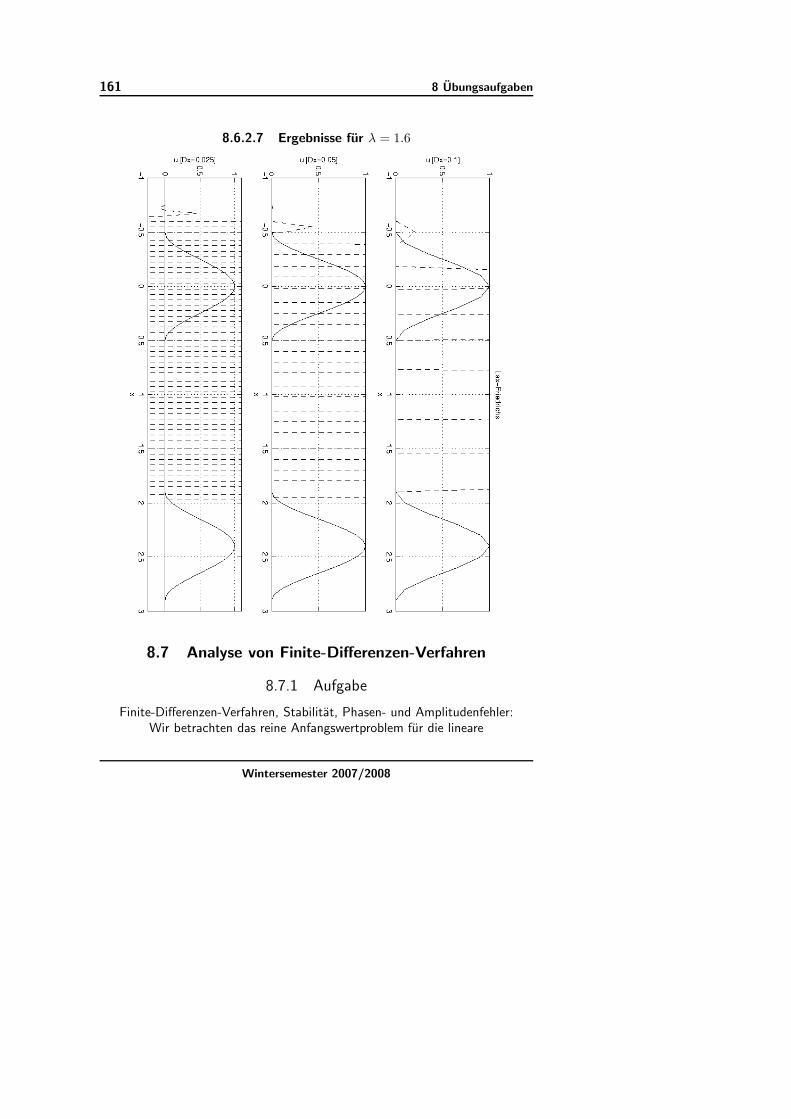
161 8 Ubungsaufgaben
8.6.2.7 Ergebnisse fur λ = 1.6
8.7 Analyse von Finite-Differenzen-Verfahren
8.7.1 Aufgabe
Finite-Differenzen-Verfahren, Stabilitat, Phasen- und Amplitudenfehler:Wir betrachten das reine Anfangswertproblem fur die lineare
Wintersemester 2007/2008

8.7 Analyse von Finite-Differenzen-Verfahren 162
Advektionsgleichung
∂u
∂t+∂u
∂x= 0 , u(0, x) = u0(x) ,
welches mit einem symmetrischen kompakten Finite-Diffenzen-Verfahren4. Ordnung raumlich diskretisiert werden soll.
(a) Leiten Sie die Koeffizienten des Verfahrens auf einem 3-Punkt-Stencildurch Taylorentwicklung (mindestens bis zur 4. Ordnung) her. ZeigenSie, dass man als Semidiskretisierung der Advektionsgleichung
1
6
(dui−1
dt+ 4
dui
dt+dui+1
dt
)+
1
2∆x(ui+1 − ui−1) = 0
erhalt.
b) Diskretisieren Sie diese Gleichung in der Zeit mit dem verallgemeinertenCrank-Nicolson-Verfahren (Diskretisierungsparameter θ), welches fur eineGleichung
df
dt= g
die Form
f (n+1) − f (n)
∆t= θg(n+1) + (1 − θ)g(n) , 0 ≤ θ ≤ 1 .
hat. Leiten Sie daraus die Volldiskretisierung
(u(n+1)i−1 − u
(n)i−1) + 4(u
(n+1)i − u
(n)i ) + (u
(n+1)i+1 − u
(n)i+1) +
+ 3θσ(u(n+1)i+1 − u
(n+1)i−1 ) + 3(1 − θ)σ(u
(n)i+1 − u
(n)i−1) = 0
mit σ = τ/ her.
(c) Zeigen Sie, dass das Symbol der Diskretisierung gegeben ist durch
G(ξ) =2 + cos ξh− 3(1 − θ)ıσ sin ξh
2 + cos ξh+ 3θıσ sin ξh∈ C| , 0 ≤ ξh ≤ π .
Zeigen Sie, dass das Verfahren fur θ ≥ 1/2 unbedingt stabil ist.
29. November 2007
163 8 Ubungsaufgaben
(d) Es sei θ = 1/2. Zeigen Sie, dass das Amplitudenverhaltnis εamp = |G| = 1
ist und stellen Sie das Phasenverhaltnis εph = arc G/(−σξh) fur0 ≤ ξh ≤ π in einem Diagramm dar. Leiten Sie zudem die numerischeDispersionsbeziehung
tanωτ
2=
3σ sin ξh
2(2 + cos ξh)
her. Verwenden Sie dazu die Rationalisierungsformel
tanα =2 tan α
2
1 − tan2 α2
.
Hinweise: Die numerische Dispersionsbeziehung ist das Analogon zuranalytischen Dispersionsbeziehung ω(ξ) = ξ, wie man durch Einsetzen vonu := u0e
−ıωteıξx in die Advektionsgleichung ermittelt. Zur Bestimmung dernumerischen Dispersionsbeziehung setzt man entsprechend einen Ansatz
u(n)i = u0e
−ıωnτeıξh in die volldiskretisierte Gleichung ein.
8.8 Losungsverfahren fur elliptische Gleichungen
8.8.1 Aufgabe
Auf dem zweidimensionalen Gebiet 0 ≤ x, y ≤ 1 soll die (elliptische)Poisson-Gleichung
∆u =∂2u
∂x2+∂2u
∂y2= f (8.27)
gelost werden. Verwenden Sie als Randbedingungen
u(x, 0) = 2(x− x2) (8.28)
u(x, 1) = 0 (8.29)
u(0, y) = 0 (8.30)
u(1, y) = 0 . (8.31)
Die Inhomogenitat sei gegeben als
f(x, y) = 10 . (8.32)
Wintersemester 2007/2008
8.8 Losungsverfahren fur elliptische Gleichungen 164
Das Gebiet soll mit Hilfe von zentralen Differenzen 2. Ordnung (siehe Skript)diskretisiert werden. Verwenden Sie dazu N ×N Gitterpunkte mit der
Gitterweite h. Setzen Sie den Losungsvektor u und den Kraftvektor f an alseindimensionalen Vektor der Form
u = (u1,1, u1,2, . . . , u1,N , u2,1, . . . , uN,N−1, uN,N)T (8.33)
Dabei entsteht ein Gleichungssystem A u = f mit N2 Zeilen
−4 1 11 −4 1 1
. . .. . .
. . .. . .
1. . .
. . .. . .
. . .. . .
. . .. . .
u1,1
u1,2
...u1,N
u2,1
...
= h2
f1,1
f1,2
...f1,N
f2,1
...
. (8.34)
Die (Dirichlet-)Randbedingungen sind in dieses Gleichungssystem noch zuimplementieren.
a) Begrunden Sie kurz, weshalb das das Problem korrekt gestellt ist.
b) Setzen Sie N = 20. Finden Sie die numerische Losung des Problemsmit einer direkten Methode Stellen Sie die Losung in einem geeignetenDiagramm (z.B. Konturplot) dar.
c) Implementieren Sie das Gauss-Seidel und das SOR-Verfahren (sieheSkript). Fuhren Sie jeweils 100 Iterationsschritte durch und dokumen-tieren Sie (graphische Darstellung in einem halblogarithmischen Plot) dieKonvergenz mit dem Verlauf des Residuums
R(m) =√
(A u(m) − f)T · (A u(m) − f) =
√∑
i
e2i mit e = A u(m)−f
(8.35)
uber den Iterationen m. Verwenden Sie als Anfangslosung u = 0.
d) Wieviele Iterationen sind mit dem SOR-Verfahren notwendig, um Maschi-nengenauigkeit zu erreichen? Verwenden Sie doppelte Genauigkeit (64 bit)zur programmtechnischen Zahldarstellung.
29. November 2007

165 8 Ubungsaufgaben
8.9 Losungsverfahren fur parabolische Gleichungen
8.9.1 Aufgabe
Untersucht wird das Problem der sogenannten Ekman-Drift. Wenn die ebeneOberflache einer ruhenden Flussigkeit mit einem Gas parallel zur Oberflache
angeblasen wird, bildet sich infolge der Scherung K zwischen Gas undFlussigkeit mit der Zeit ein Geschwindigkeitsprofil u(z, t) in der Flussigkeit
aus. K wird als konstant angenommen.Das Problem wird modelliert durch
∂u
∂t=
1
Re
∂2u
∂z2(8.36)
im Bereich −∞ ≤ z ≤ 0. Die Randbedingungen sind
∂u
∂z
∣∣∣∣z=0
= K , u(−∞, t) = 0 . (8.37)
Die Anfangsbedingung ist
u(z, 0) = 0 . (8.38)
Die exakte Losung von Gl. (8.36) ist gegeben durch
uex(z, t) = K
[z
(1 + erf
(z√Re
2√t
))+ 2
√t
πRee−
z2Re4t
],
wobei die Fehlerfunktion definiert ist durch erf(x) = 2/√π∫ x
0e−ξ2
dξ.
(a) Zur numerischen Behandlung wird eine Koordinatentransformation z ↔ ζdurch z = m(ζ) = ln(1 − ζ) eingefuhrt, wobei 0 ≤ ζ ≤ 1. Transfor-miere Gln. (8.36) und (8.37) von (z, t) auf (ζ, t) durch Anwendung derKettenregel.
(b) Unterteile das Grundintervall 0 ≤ ζ ≤ 1 in N aquidistante Teilintervalle.Gib die Semidiskretisierung (nur raumliche Ableitungen diskretisiert) vonGl. (8.36) unter Berucksichtigung der Randbedingungen an. Approximieredie auftretenden ersten und zweiten Ableitungen nach ζ durch zentraleDifferenzen 2. Ordnung.
Wintersemester 2007/2008
8.10 Lattice Boltzmann Methode 166
Hilfe : Aus der Neumann-Randbedingung erhalt man eine Beziehung furden zu extrapolierenden Wert u−1 durch Ansatz einer zentralen Differenzin Gl. (8.37). Fuhre den so berechneten Wert u−1 in die Differenzenfor-meln an der Stelle ζ = 0 ein.
(c) Zur Zeitintegration verwenden Sie das Crank-Nicolson Verfahren. Schreibeein Programm zur numerischen Berechnung der Losung bei t = 3 mitRe = 10 und K = 1. Kontrolliere hierbei die Zeitschrittweite durch∆t = 100/||A||∞, wobei A die bei der Diskretisierung der rechten Seitevon Gl. (8.36) auftretende Matrix und || • ||∞ die Zeilensummennormist. Lose das auftretende tridiagonale Gleichungssystem einmal direkt mitdem Thomas-Algorithmus (A), dann iterativ mit dem SOR-Verfahren furdie Relaxationsparameter ω = 1 (B) und ω = 1.2 (C). Nutze bei (B)und (C) die Bandstruktur der zu invertierenden Matrix aus. Betrachte dieLosung als konvergiert, wenn die euklidische Norm des Residuenvektors10−5 erreicht. Tragen fur die Losungen (A), (B) und (C) den Fehler
E = (∑N
0 (uex(ζj)−uj)2/(N+1))0.5 furN = 5, 10, 15, 20 zum Zeitpunkt
t = 3 in einem Diagramm geeignet auf. Wie ist die Fehlerordnung ?Wieviele Iterationen benotigt man im Mittel fur je (B) und (C) ?Hilfe : Unterprogramm zur Berechnung der Fehlerfunktion liegt vor.
8.10 Lattice Boltzmann Methode
8.10.1 Aufgabe
Eine laminare Poiseuille-Strmung in einem ebenen Kanal der Hohe H (Wandeparallel zu y = const, Periodizitat in x) soll mittels der D2Q9-Version eines
Lattice-Boltzmann-Verfahrens berechnet werden. Dazu steht folgendesRechenprogramm zur Verfgung:
29. November 2007
167 8 Ubungsaufgaben
Wintersemester 2007/2008
8.10 Lattice Boltzmann Methode 168
29. November 2007
169 8 Ubungsaufgaben
Wintersemester 2007/2008
8.10 Lattice Boltzmann Methode 170
29. November 2007
171 8 Ubungsaufgaben
Wintersemester 2007/2008
8.10 Lattice Boltzmann Methode 172
29. November 2007
173 8 Ubungsaufgaben
Wintersemester 2007/2008
8.10 Lattice Boltzmann Methode 174
29. November 2007
175 8 Ubungsaufgaben
Wintersemester 2007/2008
8.10 Lattice Boltzmann Methode 176
29. November 2007
177 8 Ubungsaufgaben
Wintersemester 2007/2008
8.10 Lattice Boltzmann Methode 178
29. November 2007
179 8 Ubungsaufgaben
Wintersemester 2007/2008
8.10 Lattice Boltzmann Methode 180
29. November 2007
181 8 Ubungsaufgaben
Wintersemester 2007/2008
8.10 Lattice Boltzmann Methode 182
29. November 2007
183 8 Ubungsaufgaben
Als Parameter sollen verwendet werden:
1. Anzahl Knoten in x: 30
Wintersemester 2007/2008

8.10 Lattice Boltzmann Methode 184
2. Anzahl Knoten in x: 20
3. Druckgradient in Strmungsrichtung: −0.05
4. Referenzdichte: 1
5. Relaxationsparamter: xχτ = 1.
Ausserdem werden alle Langenmasse auf die Gitterweite h und alle Zeitmasseauf die Zeitschrittweite τ normiert, sodass die numerischeSchallgeschwindigkeit des LBM-Verfahrens c = 1 wird.
Es sind zu ermitteln (i) die dimensionslose effektive Viskositat, (ii) die mittlereGeschwindigkeit im Kanal, (iii) die Reynoldszahl gebildet mit der Kanalhoheund (iv) die mittlere Dichte des Fluids. Ausserdem ist anhand der bekanntentheoretischen Losung zu ermitteln, ob die numerische Losung den theoretisch
vorhergesagten parabolischen Verlauf uber die Kanalhohe aufweist.
8.10.2 Losung
Der theoretische Wert der effektiven Viskositat ist
ν =c2
3
(1
χ− τ
2
).
Gemass Parameterwahl sind c = 1, χτ = 1, τ = 1, also ν = 1/6. Dienumerische Simulation liefert einen nahezu stationaren Wert (hier mit 100000
Zeitschritten gerechnet) von
Ubulk =1
H
H∫
0
u(y)dy = 2.7
in den Einheiten h und τ . Die Reynoldszahl ist
Re =Ubulkh
ν= 16.2 ,
und die mittlere Dichte ist ρ = 600 bezogen auf ρref .Folgendes Bild zeigt, dass das parabolische Geschwindigkeitsprofil, normiertauf Ubulk und H gut wiedergegeben wird. Allerdings ist fuhrt die Art der
Aufpragung der Randbedingungen zu grosseren Abweichungen an den Wandenals in der Kanalmitte.
29. November 2007
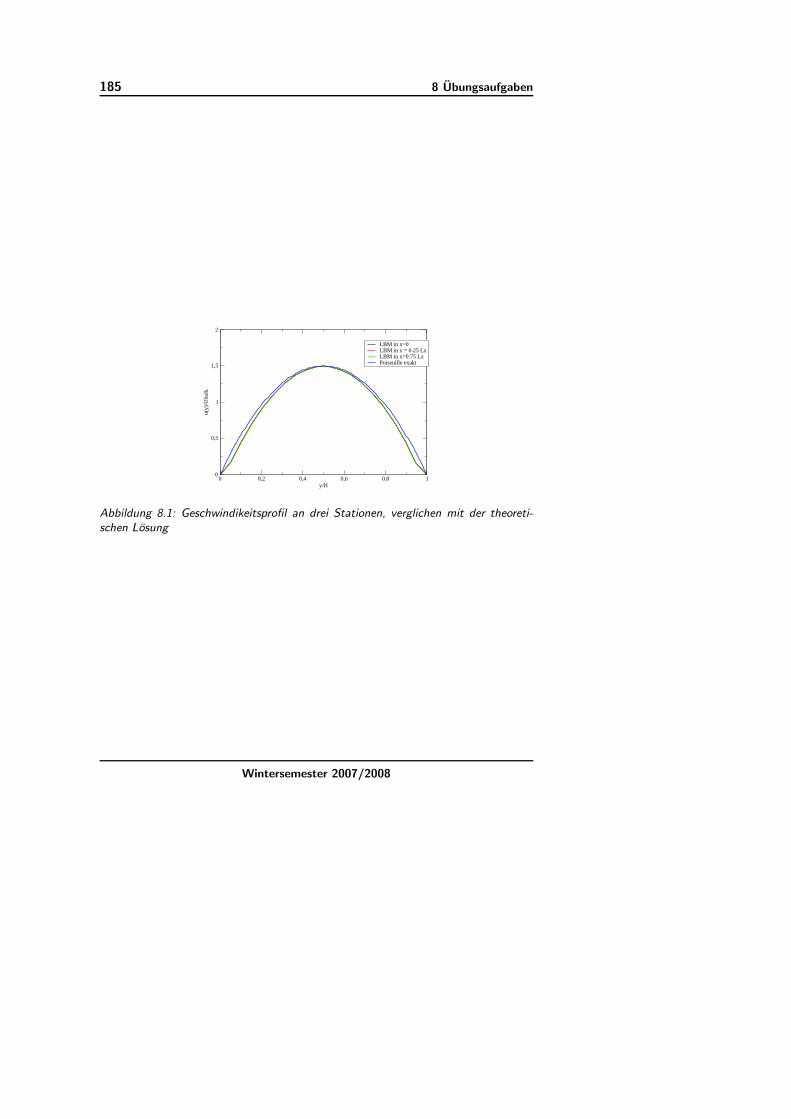
185 8 Ubungsaufgaben
0 0,2 0,4 0,6 0,8 1y/H
0
0,5
1
1,5
2
u(y)
/Ubu
lk
LBM in x=0LBM in x = 0.25 LxLBM in x=0.75 LxPoiseuille exakt
Abbildung 8.1: Geschwindikeitsprofil an drei Stationen, verglichen mit der theoreti-schen Losung
Wintersemester 2007/2008

187
Anhang A
Matrix- und Vektor-Analysis
A.1 Vektor-Normen und Matrix-Normen
Wir betrachten zunachst den Vektorraum C| M , d.h. den Raum der Vektorenv = (v1, . . . , vM ) mit vj ∈ C| . C| M enthalt insbesondere den reellen
Vektorraum IRM . Auf diesen Raumen fuhrt man verschiedene Normen ‖v‖ein, d. h. Langenmassstabe fur die Vektoren v. Allgemein ist eine Norm ‖ · ‖
auf einem Vektorraum eine reellwertige Funktion mit folgenden Eigenschaften:
(1) ‖v‖ ≥ 0, ‖v‖ = 0 genau dann wenn v = 0,
(2) ‖v + w‖ ≤ ‖v‖ + ‖w‖ (Dreiecksungleichung),
(3) ‖αv‖ = |α|‖v‖, fur jedes α ∈ C| (Homogenitat).
Gebrauchlich sind drei Vektornormen in C| M :
L1-Norm oder Betragsnorm:
‖v‖1 =
M∑
j=1
|vj | (A.1)
L2-Norm oder euklidische Norm:
‖v‖2 =
M∑
j=1
|vj |2
1/2
(A.2)
L∞-Norm oder Maximumnorm:
‖v‖∞ = max1≤j≤M
|vj | . (A.3)
Wintersemester 2007/2008

A.1 Vektor-Normen und Matrix-Normen 188
Es gelten zwischen diesen Normen folgende Relationen:
‖v‖∞ ≤ ‖v‖1 ≤M‖v‖∞ (A.4a)
‖v‖∞ ≤ ‖v‖2 ≤√M‖v‖∞ (A.4b)
‖v‖2 ≤ ‖v‖1 ≤√M‖v‖2 . (A.4c)
Mit Hilfe der oben definierten Vektornormen lassen sich Normen von Matrizeneinfuhren:
‖A‖ := maxx6=0
‖A x‖‖x‖ = max
‖x‖=1‖A x‖ . (A.5)
Es gilt damit:
‖A‖1 = max1≤j≤M
M∑
i=1
|Aij | (A.6a)
‖A‖2 =√ρ(A∗ A) (A.6b)
‖A‖∞ = max1≤i≤M
M∑
j=1
|Aij | (A.6c)
wobei A∗ = AT
die konjugiert Transponierte von A ist, und ρ(B) denSpektralradius der Matrix B bezeichnet, definiert als der betragsmassig
grosste Eigenwert von B,
ρ(B) := max |λ| , B x = λ x . (A.7)
29. November 2007

189 A Matrix- und Vektor-Analysis
A.2 Normen fur Funktionen und Gitterfunktionen
Fur eine auf einem Intervall a ≤ x ≤ b definierte Funktion f(x) definiert manfolgende Normen:
‖f‖1 =
∫ b
a
|f(x)|dx (A.8a)
‖f‖2 =
(∫ b
a
|f(x)|2dx)1/2
(A.8b)
‖f‖∞ = maxa≤x≤b
|f(x)| . (A.8c)
Fur eine auf dem Intervall a ≤ xj = a+ j∆x ≤ b, mit j = 0, . . . , N definierteGitterfunktion uN (xj) = uj definiert man die folgenden Normen:
‖uN‖1 = ∆x
N∑
j=0
|uj| (A.9a)
‖uN‖2 =
∆x
N∑
j=0
|uj|2
1/2
(A.9b)
‖uN‖∞ = max0≤j≤N
|uj | . (A.9c)
Fur ein festes N gelten zwischen diesen Normen die fur Vektornormengultigen Relationen
C1‖uN‖α ≤ ‖uN‖β ≤ C2‖uN‖α . (A.10)
Die Konstanten C1 und C2 hangen nun jedoch von N und damit von ∆x abund fur ∆x→ 0 kann das Verhalten von ‖uN‖α fur verschiedene α
unterschiedlich sein.
Wintersemester 2007/2008


191
Anhang B
Finite-Differenzen-Schemata
B.1 Finite-Differenzen-Verfahren zur Integration vongewohnlichen Differentialgleichungen
Differentialgleichung / Diskretisierung:
du
dt= f(u, t) , un = u(tn) , fn = f(un, tn) , tn = n∆t (B.1)
- Explizites Euler-Verfahren, Ordnung O(∆t):
un+1 = un + ∆t · fn (B.2)
- Implizites Euler-Verfahren, Ordnung O(∆t):
un+1 = un + ∆t · fn+1 (B.3)
- Crank-Nicolson-Verfahren, Ordnung O(∆t2):
un+1 = un +∆t
2(fn + fn+1) (B.4)
- Standard-Runge-Kutta-Verfahren, Ordnung O(∆t4):
un+1 = un +∆t
6(fn + 2k1 + 2k2 + k3) (B.5a)
mit den Abkurzungen:
u1 = un +∆t
2fn , k1 = f(u1, t
n+ 12 ) , tn+ 1
2 = tn +∆t
2(B.5b)
u2 = un +∆t
2k1 , k2 = f(u2, t
n+ 12 ) (B.5c)
u3 = un + ∆tk2 , k3 = f(u3, tn+1) (B.5d)
Wintersemester 2007/2008
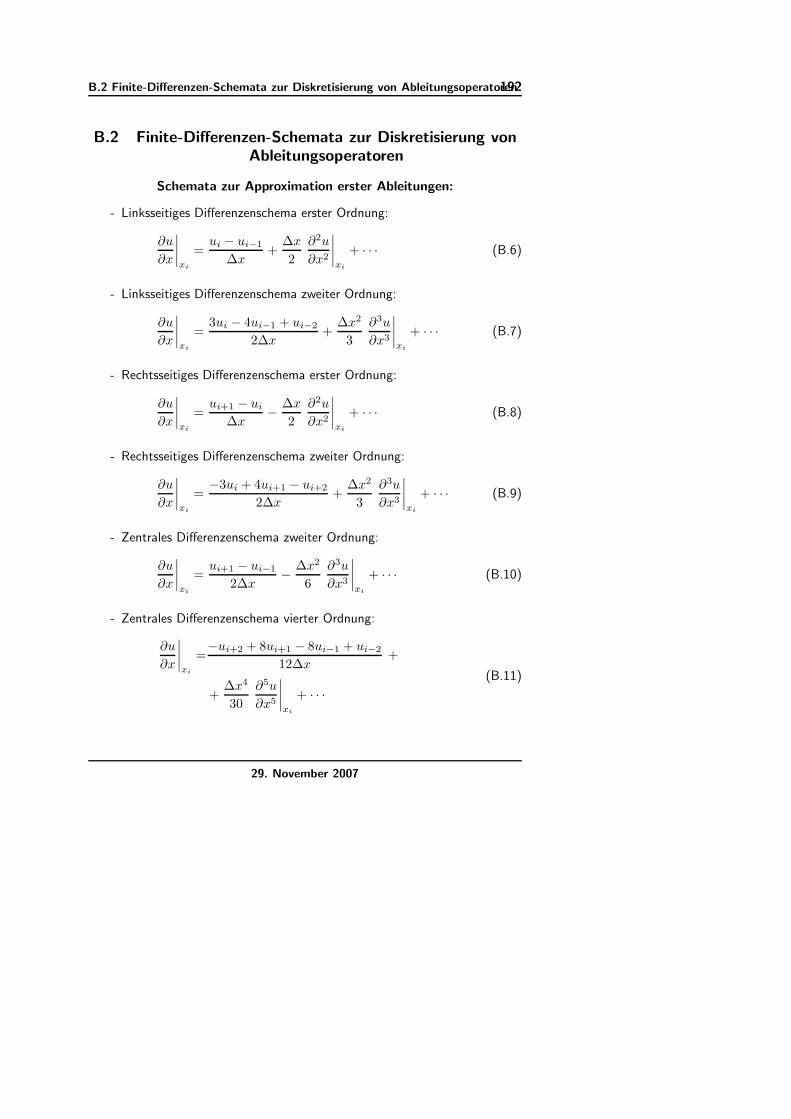
B.2 Finite-Differenzen-Schemata zur Diskretisierung von Ableitungsoperatoren192
B.2 Finite-Differenzen-Schemata zur Diskretisierung vonAbleitungsoperatoren
Schemata zur Approximation erster Ableitungen:
- Linksseitiges Differenzenschema erster Ordnung:
∂u
∂x
∣∣∣∣xi
=ui − ui−1
∆x+
∆x
2
∂2u
∂x2
∣∣∣∣xi
+ · · · (B.6)
- Linksseitiges Differenzenschema zweiter Ordnung:
∂u
∂x
∣∣∣∣xi
=3ui − 4ui−1 + ui−2
2∆x+
∆x2
3
∂3u
∂x3
∣∣∣∣xi
+ · · · (B.7)
- Rechtsseitiges Differenzenschema erster Ordnung:
∂u
∂x
∣∣∣∣xi
=ui+1 − ui
∆x− ∆x
2
∂2u
∂x2
∣∣∣∣xi
+ · · · (B.8)
- Rechtsseitiges Differenzenschema zweiter Ordnung:
∂u
∂x
∣∣∣∣xi
=−3ui + 4ui+1 − ui+2
2∆x+
∆x2
3
∂3u
∂x3
∣∣∣∣xi
+ · · · (B.9)
- Zentrales Differenzenschema zweiter Ordnung:
∂u
∂x
∣∣∣∣xi
=ui+1 − ui−1
2∆x− ∆x2
6
∂3u
∂x3
∣∣∣∣xi
+ · · · (B.10)
- Zentrales Differenzenschema vierter Ordnung:
∂u
∂x
∣∣∣∣xi
=−ui+2 + 8ui+1 − 8ui−1 + ui−2
12∆x+
+∆x4
30
∂5u
∂x5
∣∣∣∣xi
+ · · ·(B.11)
29. November 2007
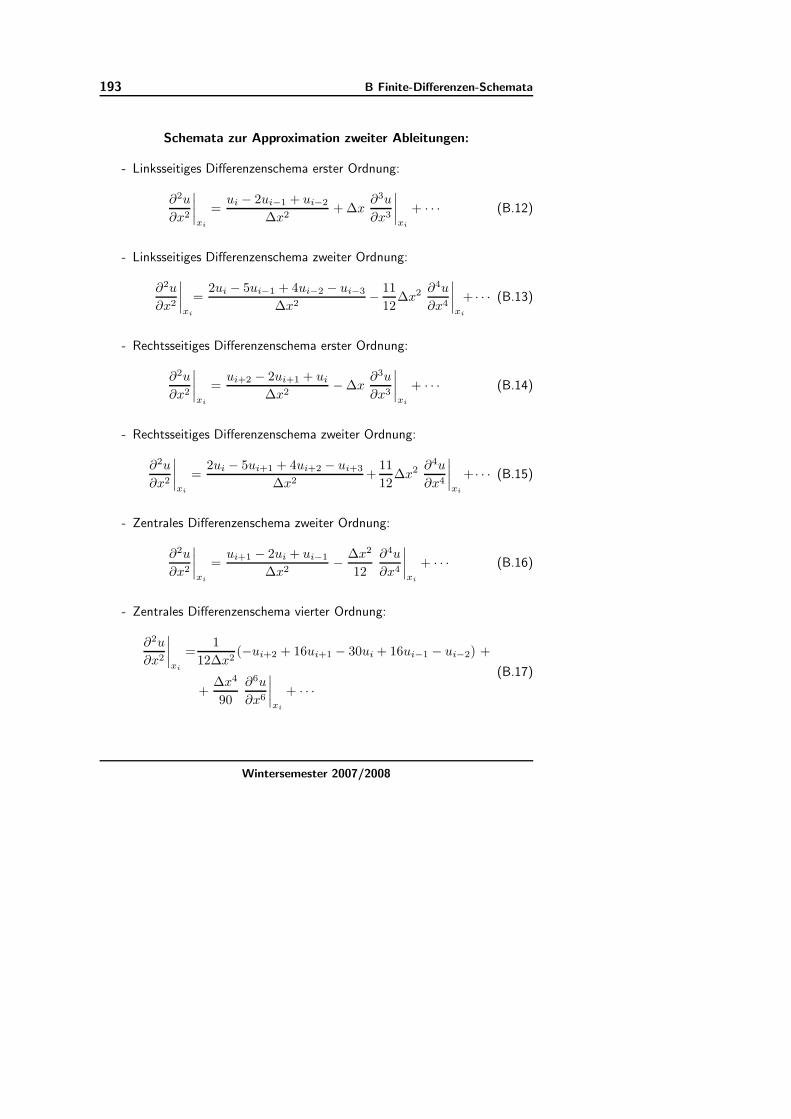
193 B Finite-Differenzen-Schemata
Schemata zur Approximation zweiter Ableitungen:
- Linksseitiges Differenzenschema erster Ordnung:
∂2u
∂x2
∣∣∣∣xi
=ui − 2ui−1 + ui−2
∆x2+ ∆x
∂3u
∂x3
∣∣∣∣xi
+ · · · (B.12)
- Linksseitiges Differenzenschema zweiter Ordnung:
∂2u
∂x2
∣∣∣∣xi
=2ui − 5ui−1 + 4ui−2 − ui−3
∆x2− 11
12∆x2 ∂
4u
∂x4
∣∣∣∣xi
+ · · · (B.13)
- Rechtsseitiges Differenzenschema erster Ordnung:
∂2u
∂x2
∣∣∣∣xi
=ui+2 − 2ui+1 + ui
∆x2− ∆x
∂3u
∂x3
∣∣∣∣xi
+ · · · (B.14)
- Rechtsseitiges Differenzenschema zweiter Ordnung:
∂2u
∂x2
∣∣∣∣xi
=2ui − 5ui+1 + 4ui+2 − ui+3
∆x2+
11
12∆x2 ∂
4u
∂x4
∣∣∣∣xi
+ · · · (B.15)
- Zentrales Differenzenschema zweiter Ordnung:
∂2u
∂x2
∣∣∣∣xi
=ui+1 − 2ui + ui−1
∆x2− ∆x2
12
∂4u
∂x4
∣∣∣∣xi
+ · · · (B.16)
- Zentrales Differenzenschema vierter Ordnung:
∂2u
∂x2
∣∣∣∣xi
=1
12∆x2(−ui+2 + 16ui+1 − 30ui + 16ui−1 − ui−2) +
+∆x4
90
∂6u
∂x6
∣∣∣∣xi
+ · · ·(B.17)
Wintersemester 2007/2008
B.3 Finite-Differenzen-Schemata zur Diskretisierung der Advektionsgleichung194
Schemata zur Approximation dritter Ableitungen:
- Zentrales Differenzenschema zweiter Ordnung:
∂3u
∂x3
∣∣∣∣xi
=1
2∆x3(ui+2 − 2ui+1 + 2ui−1 − ui−2) −
− ∆x2
4
∂5u
∂x5
∣∣∣∣xi
+ · · ·(B.18)
- Zentrales Differenzenschema vierter Ordnung:
∂3u
∂x3
∣∣∣∣xi
=1
8∆x3(−ui+3 + 8ui+2 − 13ui+1 + 13ui−1 − 8ui−2 + ui−3) +
+7
120∆x4 ∂
7u
∂x7
∣∣∣∣xi
+ · · ·
(B.19)
Schema zur Approximation vierter Ableitungen:
- Zentrales Differenzenschema zweiter Ordnung:
∂4u
∂x4
∣∣∣∣xi
=1
∆x4(ui+2 − 4ui+1 + 6ui − 4ui−1 + ui−2) −
− ∆x2
6
∂6u
∂x6
∣∣∣∣xi
+ · · ·(B.20)
B.3 Finite-Differenzen-Schemata zur Diskretisierung derAdvektionsgleichung
Differentialgleichung:
∂u
∂t+ a
∂u
∂x= 0 (B.21)
- Forward-Time Backward-Space (FTBS):
un+1j − un
j
∆t+ a
unj − un
j−1
∆x= 0 (B.22)
29. November 2007
195 B Finite-Differenzen-Schemata
- Forward-Time Central-Space (FTCS, instabil):
un+1j − un
j
∆t+ a
unj+1 − un
j−1
2∆x= 0 (B.23)
- Lax-Friedrichs:
un+1j − 1
2
(un
j+1 + unj−1
)
∆t+ a
unj+1 − un
j−1
2∆x= 0 (B.24)
- Leapfrog:
un+1j − un−1
j
2∆t+ a
unj+1 − un
j−1
2∆x= 0 (B.25)
Wintersemester 2007/2008

197
Anhang C
Literaturverzeichnis
Wintersemester 2007/2008



![Grundlagen der Theoretischen Informatiktheo.cs.ovgu.de/lehre/lehre15s/theoinf-2/ti2-2015s_v04_toprint.pdfN[v]=fu2V jfu;vg2Eg[fvg Entweder ist v in einer maximalen unabh angigen Knotenmenge](https://static.fdocument.org/doc/165x107/5cf3d1f188c99361788b9810/grundlagen-der-theoretischen-vfu2v-jfuvg2egfvg-entweder-ist-v-in-einer-maximalen.jpg)