Greedy algorithm (How to select sample points) · Greedy sampling Characteristics of greedy...
51
Greedy algorithm (How to select sample points) Goal: Selection of sample points μ 1 ,..., μ N such that V N = span{u δ (μ 1 ),...,u δ (μ N )} ≈ M δ Thursday, August 23, 2012
Transcript of Greedy algorithm (How to select sample points) · Greedy sampling Characteristics of greedy...

Greedy algorithm (How to select sample points)Goal: Selection of sample points µ1, . . . ,µN such that
VN = span{uδ(µ1), . . . , uδ(µN )} ≈Mδ
Thursday, August 23, 2012

Greedy algorithm (How to select sample points)
Estimated error feedback (A posteriori estimates): Consider
µ −→ solve: a(uN (µ), vN ;µ) = f(vN ;µ), ∀vN ∈ VN −→ ηN (µ)
where ηN (µ) is an a posteriori estimation for �uN (µ)− uδ(µ)�Vδ .
Goal: Selection of sample points µ1, . . . ,µN such that
VN = span{uδ(µ1), . . . , uδ(µN )} ≈Mδ
Thursday, August 23, 2012

Greedy algorithm (How to select sample points)
Estimated error feedback (A posteriori estimates): Consider
µ −→ solve: a(uN (µ), vN ;µ) = f(vN ;µ), ∀vN ∈ VN −→ ηN (µ)
where ηN (µ) is an a posteriori estimation for �uN (µ)− uδ(µ)�Vδ .
Greedy algorithm:
Set N = 1, choose µ1 ∈ P arbitrarily.
1. Compute uδ(µN ) (truth problem: computationally expensive)
2. Set VN = span{VN−1, uδ(µN )}
3. Find µN+1 = arg maxµ∈P ηN (µ)
4. Set N := N + 1 and goto 1. while maxµ∈P ηN (µ) > Tol
Goal: Selection of sample points µ1, . . . ,µN such that
VN = span{uδ(µ1), . . . , uδ(µN )} ≈Mδ
Thursday, August 23, 2012

• Only N truth problems need to be solved (compared to POD approach)• Error control through estimator for any parameter value
Greedy algorithm (How to select sample points)
Estimated error feedback (A posteriori estimates): Consider
µ −→ solve: a(uN (µ), vN ;µ) = f(vN ;µ), ∀vN ∈ VN −→ ηN (µ)
where ηN (µ) is an a posteriori estimation for �uN (µ)− uδ(µ)�Vδ .
Greedy algorithm:
Set N = 1, choose µ1 ∈ P arbitrarily.
1. Compute uδ(µN ) (truth problem: computationally expensive)
2. Set VN = span{VN−1, uδ(µN )}
3. Find µN+1 = arg maxµ∈P ηN (µ)
4. Set N := N + 1 and goto 1. while maxµ∈P ηN (µ) > Tol
Goal: Selection of sample points µ1, . . . ,µN such that
VN = span{uδ(µ1), . . . , uδ(µN )} ≈Mδ
Thursday, August 23, 2012

Greedy algorithm: illustration
One-dimensional parameter space
Thursday, August 23, 2012

Greedy algorithm: illustration
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1
1
Erro
rError estimateTrue error
One-dimensional parameter space
Thursday, August 23, 2012

Greedy algorithm: illustration
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1
1
Erro
rError estimateTrue error
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1
1
Erro
rError estimateTrue error
One-dimensional parameter space
Thursday, August 23, 2012

Greedy algorithm: illustration
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1
1
Erro
rError estimateTrue error
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1
1
Erro
rError estimateTrue error
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1Er
ror
Error estimateTrue error
One-dimensional parameter space
Thursday, August 23, 2012

Greedy algorithm: illustration
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1
1
Erro
rError estimateTrue error
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1
1
Erro
rError estimateTrue error
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1Er
ror
Error estimateTrue error
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1
1
Erro
rError estimateTrue error
One-dimensional parameter space
Thursday, August 23, 2012

Greedy algorithm: illustration
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1
1
Erro
rError estimateTrue error
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1
1
Erro
rError estimateTrue error
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1Er
ror
Error estimateTrue error
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1
1
Erro
rError estimateTrue error
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1
1
Erro
rError estimateTrue error
One-dimensional parameter space
Thursday, August 23, 2012

Greedy algorithm
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1
1
Erro
r
Error estimateTrue error
10 12 14 16 18 20k
1x10-8
1x10-7
1x10-6
0.00001
0.0001
0.001
0.01
0.1
Erro
r
Error estimateTrue error
Dorfler marking vs. greedy-selection:
Thursday, August 23, 2012

Greedy sampling
Characteristics of greedy RB-space construction:
o Cheap: N truth problems need to be solved for an N -dimensional RB-space.o Accuracy is guaranteed by theoretical results.o Provides a hierarchical family of reduced basis spaces: VN−1 ⊂ VN .
Thursday, August 23, 2012

Greedy sampling
Characteristics of greedy RB-space construction:
o Cheap: N truth problems need to be solved for an N -dimensional RB-space.o Accuracy is guaranteed by theoretical results.o Provides a hierarchical family of reduced basis spaces: VN−1 ⊂ VN .
Practical hint: The basis functions uδ(µ1), . . . , uδ(µN ) might be highly linearlydependent and lead to a poor conditioning of the system matrix
Bij(µ) = a(uδ(µj), uδ(µi);µ).
Thursday, August 23, 2012

Greedy sampling
Characteristics of greedy RB-space construction:
o Cheap: N truth problems need to be solved for an N -dimensional RB-space.o Accuracy is guaranteed by theoretical results.o Provides a hierarchical family of reduced basis spaces: VN−1 ⊂ VN .
Remedy: Apply the Gram-Schmidt orthonormalization procedure to the set ofbasis functions using the inner product (·, ·)V. This leads to a new set {ξ1, . . . , ξN}of basis functions with better conditioning properties.
Practical hint: The basis functions uδ(µ1), . . . , uδ(µN ) might be highly linearlydependent and lead to a poor conditioning of the system matrix
Bij(µ) = a(uδ(µj), uδ(µi);µ).
Thursday, August 23, 2012

Theoretical estimates of the greedy algorithm
Here: PN : V→ VN denotes the projection onto VN .
Exact greedy algorithm:
Set N = 1, choose µ1 ∈ P arbitrarily.
1. Set VN = span{VN−1, u(µN )}
2. Find µN+1 = arg maxµ∈P �u(µ)− PNu(µ)�V
3. Set N := N + 1 and goto 1. while maxµ∈P �u(µ)− PNu(µ)�V > Tol
Difference to practical greedy implementation:
1. Exact solutions u(µ) available (instead of uδ(µ)).
2. Exact error �u(µ)− PNu(µ)�V is supposed to be known/computable.
3. The projection PN is used instead of the Galerkin-projection based onbilinear form a(·, ·;µ): Find uN (µ) ∈ VN s.t.
a(uN (µ), vN ;µ) = f(vN ;µ), ∀vN ∈ VN .
Thursday, August 23, 2012

Theoretical estimates of the greedy algorithm
Recall: V : Hilbert space,
M = {u(µ) ; ∀µ ∈ P} ⊂ V : Exact solution manifold.
What is provided by the exact greedy algorithm? A N-dimensional sub-space Vgr
N ⊂ Vδ with approximation error
d(VgrN ) = sup
v∈Minf
vN∈VgrN
�v − vN�V.
VgrN is of the particular form Vgr
N = span{uδ(µ1), . . . , uδ(µN )}.
Thursday, August 23, 2012

Theoretical estimates of the greedy algorithm
What means optimal? Find the N-dimensional subspace VN ⊂ Vδ such thatthe approximation error
d(VN ) = supv∈M
infvN∈VN
�v − vN�V
is minimized. We denote this space by VKolN and d(VKol
N ) as the Kolmogorovwidth.
Recall: V : Hilbert space,
M = {u(µ) ; ∀µ ∈ P} ⊂ V : Exact solution manifold.
What is provided by the exact greedy algorithm? A N-dimensional sub-space Vgr
N ⊂ Vδ with approximation error
d(VgrN ) = sup
v∈Minf
vN∈VgrN
�v − vN�V.
VgrN is of the particular form Vgr
N = span{uδ(µ1), . . . , uδ(µN )}.
Thursday, August 23, 2012

Theoretical estimates of the greedy algorithm
What means optimal? Find the N-dimensional subspace VN ⊂ Vδ such thatthe approximation error
d(VN ) = supv∈M
infvN∈VN
�v − vN�V
is minimized. We denote this space by VKolN and d(VKol
N ) as the Kolmogorovwidth.
Note: The best approximation space VKolN is in general not a subspace ofM.
Recall: V : Hilbert space,
M = {u(µ) ; ∀µ ∈ P} ⊂ V : Exact solution manifold.
What is provided by the exact greedy algorithm? A N-dimensional sub-space Vgr
N ⊂ Vδ with approximation error
d(VgrN ) = sup
v∈Minf
vN∈VgrN
�v − vN�V.
VgrN is of the particular form Vgr
N = span{uδ(µ1), . . . , uδ(µN )}.
Thursday, August 23, 2012

Theoretical estimates of the greedy algorithm
1 10 100N
0.0001
0.001
0.01
0.1
1
10
100
1000
10000
100000
1x106
Kolmogorov widthupper bound for greedy
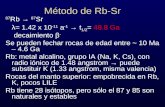
M = 1α = 2⇒ C = 524�288
Theorem. (Polynomial decay of greedy approximation)Suppose that d(XKol
N ) ≤ M and
d(VKolN ) ≤ MN−α, N > 0,
for some M > 0 and α > 0. Then,
d(VgrN ) ≤ CMN−α, N > 0,
with C := q12 (4q)α and q := �2α+1�2.
Thursday, August 23, 2012

Theoretical estimates of the greedy algorithm
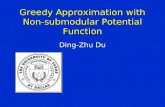
5 10 15 20N
1x10-381x10-361x10-341x10-321x10-301x10-281x10-261x10-241x10-221x10-201x10-181x10-161x10-141x10-121x10-101x10-81x10-6
0.00010.01
1Kolmogorov widthupper bound for greedy
Theorem. (Exponential decay of greedy approximation)There holds
d(VgrN ) ≤ 2√
32N d(VKol
N ).
d(VKolN ) = e−N1.5
Thursday, August 23, 2012

Theoretical estimates of the greedy algorithm
Remarks:
1. More estimates are available.
2. Estimates of the form d(VgrN ) ≤ C d(VKol
N ) can not be established(counter-example exists).
3. The assumptions on the greedy algorithm can be relaxed:o Error estimates η(µ) can be used instead of the exact error.o Discrete solutions uδ(µ) can be considered instead of the exact
solutions u(µ).o Yields different estimates (of course).
Thursday, August 23, 2012

Theoretical estimates of the greedy algorithm
Remarks:
1. More estimates are available.
2. Estimates of the form d(VgrN ) ≤ C d(VKol
N ) can not be established(counter-example exists).
3. The assumptions on the greedy algorithm can be relaxed:o Error estimates η(µ) can be used instead of the exact error.o Discrete solutions uδ(µ) can be considered instead of the exact
solutions u(µ).o Yields different estimates (of course).
References:
[1] Binev et al. Convergence rates for greedy algorithms in reduced basis methods. SIAM J. Math. Anal. (2011) vol. 43 (3) pp. 1457-1472
[2] Buffa et al. A priori convergence of the Greedy algorithm for the parametrized reduced basis method. Esaim-Math Model Num (2012) vol. 46 (3) pp. 595-603
Thursday, August 23, 2012

Theoretical estimates of the greedy algorithm
Remarks:
1. More estimates are available.
2. Estimates of the form d(VgrN ) ≤ C d(VKol
N ) can not be established(counter-example exists).
3. The assumptions on the greedy algorithm can be relaxed:o Error estimates η(µ) can be used instead of the exact error.o Discrete solutions uδ(µ) can be considered instead of the exact
solutions u(µ).o Yields different estimates (of course).
References:
[1] Binev et al. Convergence rates for greedy algorithms in reduced basis methods. SIAM J. Math. Anal. (2011) vol. 43 (3) pp. 1457-1472
[2] Buffa et al. A priori convergence of the Greedy algorithm for the parametrized reduced basis method. Esaim-Math Model Num (2012) vol. 46 (3) pp. 595-603
Open problem:
Parametrized problem ⇒ Decay of Kolmogorov width
Thursday, August 23, 2012

EfficiencyHow to solve: “For µ ∈ P, find the solution uN (µ) ∈ VN of
a(uN (µ), vN ;µ) = f(vN ;µ), ∀vN ∈ VN .”
fastly?
Further assumption: The output functional s(·;µ) is linear.
It shall be avoided that, if VN = span{ξ1, . . . , ξN}, the matrix
(Aµ)ij = a(ξj , ξi;µ), ∀ 1 ≤ i, j ≤ N,
needs to be reassembled for each new parameter value µ ∈ P.Why? ⇒ Assembly process depends on N = dim(Vδ).
Thursday, August 23, 2012

Efficiency
Assumption:
a(w, v;µ) =Ma�
m=1
Θma (µ) am(w, v),
f(v;µ) =Mf�
m=1
Θmf (µ) fm(v),
s(v;µ) =Ms�
m=1
Θms (µ) sm(v),
where
Θma ,Θm
f Θms : D → R µ− dependent functions,
am : V× V→ R µ− independent forms,fm, sm : V→ R µ− independent forms,
Thursday, August 23, 2012

Efficiency: example
Example: Convection-diffusion
a(u, v; ε) = ε
� 1
0u�(x)v�(x) dx +
� 1
0u�(x)v(x) dx,
a1(u, v; ε) =� 1
0u�(x)v�(x) dx, Θ1
a(ε) = ε,
a2(u, v; ε) =� 1
0u�(x)v(x) dx, Θ2
a(ε) = 1,
Thursday, August 23, 2012

Efficiency: example
Example: Convection-diffusion
a(w, v;µ) =15�
i=1
µi
�
Ri
∇w ·∇v +�
RP+1
∇w ·∇v,
ai(w, v;µ) =�
Ri
∇w ·∇v, Θia(µ) = µi, i = 1, . . . , 15,
a16(w, v;µ) =�
R16
∇w ·∇v, Θ16a (µ) = 1,
Example: Heat conduction on thermal blocks
a(u, v; ε) = ε
� 1
0u�(x)v�(x) dx +
� 1
0u�(x)v(x) dx,
a1(u, v; ε) =� 1
0u�(x)v�(x) dx, Θ1
a(ε) = ε,
a2(u, v; ε) =� 1
0u�(x)v(x) dx, Θ2
a(ε) = 1,
Thursday, August 23, 2012

Off-line:
On-line:
Affine assumption: Off-line/on-line
For each new parameter value µ ∈ P
Given VN = span{ξi | i = 1, . . . , N} precompute
(Am)i,j = am(ξj , ξi), ∀ 1 ≤ i, j ≤ N,
(Fm)i = fm(ξi), ∀ 1 ≤ i ≤ N,
(Sm)i = sm(ξi), ∀ 1 ≤ i ≤ N.
Rem. Depends on N = dim(Vδ).Rem. Size of Am and Fm, Sm is N2 resp. N .
1. Assemble (depending on M and N , i.e. ∼MN2 resp. ∼MN)
Aµ =Ma�
m=1
Θma (µ)Am Fµ =
Mf�
m=1
Θmf (µ)Fm
2. Solve Aµu(µ) = Fµ. (depending on N , i.e ∼ N3 for LU factorization)3. Compute
s(uN (µ);µ) =Ms�
m=1
N�
n=1
un(µ) Θms (µ) (Sm)n.
Thursday, August 23, 2012

Off-line/On-line procedure: Is it worth?
Computational costs:
o Off-line procedure: Toff.
o One on-line evaluation: Ton.
o One truth solve: Ttr � Ton.
Thursday, August 23, 2012

Off-line/On-line procedure: Is it worth?
Computational costs:
o Off-line procedure: Toff.
o One on-line evaluation: Ton.
o One truth solve: Ttr � Ton.
Evaluation for M parameter values:1. Brute force approach: M · Ttr.2. Reduced basis method: Toff + M · Ton.
Thursday, August 23, 2012

Off-line/On-line procedure: Is it worth?
Computational costs:
o Off-line procedure: Toff.
o One on-line evaluation: Ton.
o One truth solve: Ttr � Ton.
Evaluation for M parameter values:1. Brute force approach: M · Ttr.2. Reduced basis method: Toff + M · Ton.
Theoretical considerations:
o The parameter space P is a continuous space (not discrete): M is potentiallyarbitrarily high.
o Whenever the number M of parameter evaluations is high enough, thereduced basis method is always cheaper.
Thursday, August 23, 2012

Off-line/On-line procedure: Is it worth?
Computational costs:
o Off-line procedure: Toff.
o One on-line evaluation: Ton.
o One truth solve: Ttr � Ton.
Evaluation for M parameter values:1. Brute force approach: M · Ttr.2. Reduced basis method: Toff + M · Ton.
1x103 1x104 1x105 1x106
Number of parameter evaluations: M
0
20
40
60
80
100
Spee
d-up
Realistic example:
o Ton = 1.o Ttr = 102 (realistic speed-up).o Toff = 104 (N = 100).
Brute force: M · Ttr = M · 102
RBM: Toff + M · Ton = 104 + M
Thursday, August 23, 2012

Schematic overview of Reduced Basis Method (so far)
Offline procedure:
1. Construct the reduced basis space VN empirically (Greedy)2. Precompute the matrices Am and the vectors Fm, Sm
uN (µ) =N�
n=1
un(µ) ξn
Online procedure:
µ −→ solve: uN (µ) −→ s(uN (µ);µ)
which consists of
1. AssembleAµ =
Ma�
m=1
Θma (µ) Am Fµ =
Mf�
m=1
Θmf (µ) Fm
2. Solve Aµu(µ) = Fµ (N -dimensional linear system, N � N )3. Compute s(uN (µ);µ)
Characteristics: Independent of N = dim(Vδ): cheap. Feasible in a many-query context.
Thursday, August 23, 2012

Schematic overview of Reduced Basis Method (so far)
Offline procedure:
1. Construct the reduced basis space VN empirically (Greedy)2. Precompute the matrices Am and the vectors Fm, Sm
uN (µ) =N�
n=1
un(µ) ξn
Online procedure:
µ −→ solve: uN (µ) −→ s(uN (µ);µ)
which consists of
1. AssembleAµ =
Ma�
m=1
Θma (µ) Am Fµ =
Mf�
m=1
Θmf (µ) Fm
2. Solve Aµu(µ) = Fµ (N -dimensional linear system, N � N )3. Compute s(uN (µ);µ)
Characteristics: Independent of N = dim(Vδ): cheap. Feasible in a many-query context.
Idea: Restrict the solution space from Vδ to VN ≈ {uδ(µ) : µ ∈ P}
empirically. →Discard unnecessary
modes.
Thursday, August 23, 2012

A posteriori error estimation
Thursday, August 23, 2012

A posteriori estimate
So far we assumed the a posteriori estimation process:
µ −→ solve: a(uN (µ), vN ;µ) = f(vN ;µ), ∀vN ∈ VN −→ ηN (µ)
where ηN (µ) is an a posteriori estimation for �uN (µ)− uδ(µ)�Vδ .
o Estimates the discrete error �uδ(µ)− uN (µ)�V by ηN (µ).
o Crucial for selection process in greedy algorithm. (Off-line)
o Should be cheap, i.e., independent on N = dim(Vδ). (Off- and On-line)
o Certifies the model order reduction error with a computable bound:
�uδ(µ)− uN (µ)�V ≤ ηN (µ)
Thursday, August 23, 2012

A posteriori estimate
Why only �uδ(µ)− uN (µ)�V?
Error of truthapproximation
Error of modelorder reduction
Given by theapproximationspace Vδ
Depends on thereduced basisspace VN
Needs to be estimated
�u(µ)− uN (µ)�V ≤ �u(µ)− uδ(µ)�V� �� � + �uδ(µ)− uN (µ)�V� �� �
Assumption:
supµ∈P
�u(µ)− uδ(µ)�V ≤ tol
by the choice of Vδ.
Thursday, August 23, 2012

The error estimate ηTruth solution: Find uδ(µ) ∈ Vδ such that
a(uδ(µ), vδ;µ) = f(vδ;µ), ∀vδ ∈ Vδ.
Define the errore(µ) = uδ(µ)− uN (µ) ∈ Vδ.
Thursday, August 23, 2012

The error estimate η
Error committed by the modelorder reduction, i.e. by re-stricting the solution spacefrom Vδ to VN .
Truth solution: Find uδ(µ) ∈ Vδ such that
a(uδ(µ), vδ;µ) = f(vδ;µ), ∀vδ ∈ Vδ.
Define the errore(µ) = uδ(µ)− uN (µ) ∈ Vδ.
Thursday, August 23, 2012

The error estimate η
Error committed by the modelorder reduction, i.e. by re-stricting the solution spacefrom Vδ to VN .
Truth solution: Find uδ(µ) ∈ Vδ such that
a(uδ(µ), vδ;µ) = f(vδ;µ), ∀vδ ∈ Vδ.
Define the errore(µ) = uδ(µ)− uN (µ) ∈ Vδ.
The error equation yields
a(e(µ), vδ;µ) = r(vδ;µ), ∀vδ ∈ Vδ,
r(vδ;µ) = f(vδ;µ)− a(uN (µ), vδ;µ), ∀vδ ∈ Vδ.
Thursday, August 23, 2012

The error estimate η
Error committed by the modelorder reduction, i.e. by re-stricting the solution spacefrom Vδ to VN .
Truth solution: Find uδ(µ) ∈ Vδ such that
a(uδ(µ), vδ;µ) = f(vδ;µ), ∀vδ ∈ Vδ.
Define the errore(µ) = uδ(µ)− uN (µ) ∈ Vδ.
The error equation yields
a(e(µ), vδ;µ) = r(vδ;µ), ∀vδ ∈ Vδ,
r(vδ;µ) = f(vδ;µ)− a(uN (µ), vδ;µ), ∀vδ ∈ Vδ.
Using the Riesz representation theorem yields e(µ) ∈ Vδ s.t.
(e(µ), vδ)V = r(vδ;µ), ∀vδ ∈ Vδ,
�r(·,µ)�V�δ
= supvδ∈Vδ
r(vδ;µ)�vδ�V
= �e(µ)�V, ∀vδ ∈ Vδ.
Thursday, August 23, 2012

Error certificationRecall: The solvability requires αδ(µ) > 0 s.t.
αδ(µ) �vδ�V ≤ supwδ∈Vδ
a(vδ, wδ;µ)�wδ�V
, or αδ(µ) �vδ�2V ≤ a(vδ, vδ;µ),
for all vδ ∈ Vδ, from which one recovers the estimator
ηN (µ) =�e(µ)�VαLB(µ)
, 0 < αLB(µ) ≤ αδ(µ).
Thursday, August 23, 2012

Error certification
Difficult task but doable! (later)
Recall: The solvability requires αδ(µ) > 0 s.t.
αδ(µ) �vδ�V ≤ supwδ∈Vδ
a(vδ, wδ;µ)�wδ�V
, or αδ(µ) �vδ�2V ≤ a(vδ, vδ;µ),
for all vδ ∈ Vδ, from which one recovers the estimator
ηN (µ) =�e(µ)�VαLB(µ)
, 0 < αLB(µ) ≤ αδ(µ).
Thursday, August 23, 2012

Error certification
Difficult task but doable! (later)
Recall: The solvability requires αδ(µ) > 0 s.t.
αδ(µ) �vδ�V ≤ supwδ∈Vδ
a(vδ, wδ;µ)�wδ�V
, or αδ(µ) �vδ�2V ≤ a(vδ, vδ;µ),
for all vδ ∈ Vδ, from which one recovers the estimator
ηN (µ) =�e(µ)�VαLB(µ)
, 0 < αLB(µ) ≤ αδ(µ).
Theorem: The estimator is reliable
�uδ(µ)− uN (µ)�V ≤ ηN (µ).
Thursday, August 23, 2012

Error certification
Difficult task but doable! (later)
Recall: The solvability requires αδ(µ) > 0 s.t.
αδ(µ) �vδ�V ≤ supwδ∈Vδ
a(vδ, wδ;µ)�wδ�V
, or αδ(µ) �vδ�2V ≤ a(vδ, vδ;µ),
for all vδ ∈ Vδ, from which one recovers the estimator
ηN (µ) =�e(µ)�VαLB(µ)
, 0 < αLB(µ) ≤ αδ(µ).
Theorem: The estimator is reliable
�uδ(µ)− uN (µ)�V ≤ ηN (µ).
Proof: (Coercivy problem)
�uδ(µ)− uN (µ)� �� �=e(µ)
�2V ≤1
αδ(µ)a(e(µ), e(µ);µ) =
1αδ(µ)
supwδ∈Vδ
r(e(µ);µ)
=1
αδ(µ)sup
wδ∈Vδ
(e(µ), e(µ))V ≤1
αδ(µ)�e(µ)�V�e(µ)�V
≤ 1αLB(µ)
�e(µ)�V�e(µ)�V = ηN (µ)�e(µ)�V.
�Thursday, August 23, 2012

Error certification
Difficult task but doable! (later)
Recall: The solvability requires αδ(µ) > 0 s.t.
αδ(µ) �vδ�V ≤ supwδ∈Vδ
a(vδ, wδ;µ)�wδ�V
, or αδ(µ) �vδ�2V ≤ a(vδ, vδ;µ),
for all vδ ∈ Vδ, from which one recovers the estimator
ηN (µ) =�e(µ)�VαLB(µ)
, 0 < αLB(µ) ≤ αδ(µ).
Theorem: The estimator is reliable
�uδ(µ)− uN (µ)�V ≤ ηN (µ).
Proof: (Saddle-point problem)
�uδ(µ)− uN (µ)� �� �=e(µ)
�V ≤1
αδ(µ)sup
wδ∈Vδ
a(e(µ), wδ;µ)�wδ�V
=1
αδ(µ)sup
wδ∈Vδ
r(wδ;µ)�wδ�V
=1
αδ(µ)sup
wδ∈Vδ
(e(µ), wδ)V�wδ�V
≤ 1αδ(µ)
�e(µ)�V
≤ 1αLB(µ)
�e(µ)�V = ηN (µ).
�Thursday, August 23, 2012

Error certification
Corollary: Effectivity is bounded from below
ηN (µ)�uδ(µ)− uN (µ)�V
≥ 1.
Thursday, August 23, 2012

Error certification
Corollary: Effectivity is bounded from below
ηN (µ)�uδ(µ)− uN (µ)�V
≥ 1.
Theorem: The estimator is efficient
ηN (µ) ≤ γ(µ)αLB(µ)
�uδ(µ)− uN (µ)�V
Thursday, August 23, 2012

Error certification
Corollary: Effectivity is bounded from below
ηN (µ)�uδ(µ)− uN (µ)�V
≥ 1.
Theorem: The estimator is efficient
ηN (µ) ≤ γ(µ)αLB(µ)
�uδ(µ)− uN (µ)�V
Proof:
�e(µ)�2V = (e(µ), e(µ))V = a(e(µ), e(µ);µ) ≤ γδ�e(µ)�V�e(µ)�V
and thusηN (µ) =
�e(µ)�VαLB(µ)
≤ γδ(µ)αLB(µ)
�e(µ)�V
�
Thursday, August 23, 2012

Output functional
o Sharper bounds can be obtained using a primal-dual approach: Requiresto also assemble a reduced basis for the dual problem.
Theorem: If the output functional s : V → R is linear, then the error in theoutput functional can be bounded by
|s(u(µ))− s(uN (µ))| ≤ �s�V�δ
ηN (µ).
Proof:
|s(uδ(µ))− s(uN (µ))| = |s(uδ(µ)− uN (µ))|
≤ supvδ∈Vδ
s(vδ)�vδ�V
�uδ(µ)− uN (µ)�V
≤ �s�V�δ
ηN (µ).
�
Thursday, August 23, 2012

On-line computation of error estimate
Question: How to compute ηN (µ) independently of N = dim(Vδ)?
Recall:ηN (µ) =
�e(µ)�Vδ
αLB(µ)
o µ → αLB(µ) will be discussed later.o Here: Computation of �e(µ)�Vδ .
Goal: Decompose �e(µ)�V into a pre-computable parameter independent Off-
line part and a parameter dependent On-line part which is independent on N .
Recall:
(e(µ), vδ)V = r(vδ;µ) = f(vδ;µ)− a(uN (µ), vh;µ), ∀vδ ∈ Vδ.
Thursday, August 23, 2012