Global stabilization of fractional-order memristive neural ...
22
Global O(t -α ) stabilization of fractional‑order memristive neural networks with time delays Ling Liu 1 , Ailong Wu 1* and Xingguo Song 2 Background Recently, the fractional calculus serving the fractional-order models develops fast in both theoretical and application. e analysis about fractional-order models has attracted increasing attention cause of its promising applications in various areas of sci- ence and engineering (see Chen and Chen 2015; Chen et al. 2014; Liu et al. 2015; Liang et al. 2015; Li et al. 2015; Rakkiyappan et al. 2014, 2015b; Stamova 2014; Velmurugan and Rakkiyappan 2016; Velmurugan et al. 2016; Wang et al. 2014; Wu and Zeng 2016; Wu et al. 2016). Comparing with integer-order systems, fractional-order systems show the superiority of describing and modeling the real world or the practical problems such as anomalous diffusion, signal processing, fractal theory and continuum mechanics. Whereas, it is arduously to promote the development of research about fractional-order models for the absence of efficient mathematical tools. As mentioned by Chen and Chen (2016), Chen et al. (2014), some new and useful methods for the qualitative analysis of fractional-order models are very imperative. On the other hand, memristor is a circuit element which was proposed by Chua (1971) and has been realized the prototype by Hewlett-Packard laboratory in Strukov et al. (2008) and Tour and He (2008). Different from classical resistors, memristor is a nonlin- ear resistor which owns non-uniqueness values. In addition, the memristor can manage Abstract This article is concerned with the global O(t -α ) stabilization for a class of fractional- order memristive neural networks with time delays (FMDNNs). Two kinds of con- trol scheme (i.e., state feedback control law and output feedback control law) are employed to stabilize a class of FMDNNs. Several stabilization conditions in form of algebraic criteria are presented based on a new fractional-order Lyapunov function method and Leibniz rule. Some examples are given to substantiate the effectiveness of the presented theoretical results. Keywords: Fractional-order systems, Memristive neural networks, Global O(t −α ) stabilization Mathematics Subject Classification: 37B25, 34A08 Open Access © 2016 The Author(s). This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. RESEARCH Liu et al. SpringerPlus (2016) 5:1034 DOI 10.1186/s40064‑016‑2374‑3 *Correspondence: [email protected] 1 College of Mathematics and Statistics, Hubei Normal University, Huangshi 435002, China Full list of author information is available at the end of the article
Transcript of Global stabilization of fractional-order memristive neural ...

Global O(t−α) stabilization of fractional‑order memristive neural networks with time delaysLing Liu1, Ailong Wu1* and Xingguo Song2
BackgroundRecently, the fractional calculus serving the fractional-order models develops fast in both theoretical and application. The analysis about fractional-order models has attracted increasing attention cause of its promising applications in various areas of sci-ence and engineering (see Chen and Chen 2015; Chen et al. 2014; Liu et al. 2015; Liang et al. 2015; Li et al. 2015; Rakkiyappan et al. 2014, 2015b; Stamova 2014; Velmurugan and Rakkiyappan 2016; Velmurugan et al. 2016; Wang et al. 2014; Wu and Zeng 2016; Wu et al. 2016). Comparing with integer-order systems, fractional-order systems show the superiority of describing and modeling the real world or the practical problems such as anomalous diffusion, signal processing, fractal theory and continuum mechanics. Whereas, it is arduously to promote the development of research about fractional-order models for the absence of efficient mathematical tools. As mentioned by Chen and Chen (2016), Chen et al. (2014), some new and useful methods for the qualitative analysis of fractional-order models are very imperative.
On the other hand, memristor is a circuit element which was proposed by Chua (1971) and has been realized the prototype by Hewlett-Packard laboratory in Strukov et al. (2008) and Tour and He (2008). Different from classical resistors, memristor is a nonlin-ear resistor which owns non-uniqueness values. In addition, the memristor can manage
Abstract
This article is concerned with the global O(t−α) stabilization for a class of fractional-order memristive neural networks with time delays (FMDNNs). Two kinds of con-trol scheme (i.e., state feedback control law and output feedback control law) are employed to stabilize a class of FMDNNs. Several stabilization conditions in form of algebraic criteria are presented based on a new fractional-order Lyapunov function method and Leibniz rule. Some examples are given to substantiate the effectiveness of the presented theoretical results.
Keywords: Fractional-order systems, Memristive neural networks, Global O(t−α) stabilization
Mathematics Subject Classification: 37B25, 34A08
Open Access
© 2016 The Author(s). This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
RESEARCH
Liu et al. SpringerPlus (2016) 5:1034 DOI 10.1186/s40064‑016‑2374‑3
*Correspondence: [email protected] 1 College of Mathematics and Statistics, Hubei Normal University, Huangshi 435002, ChinaFull list of author information is available at the end of the article

Page 2 of 22Liu et al. SpringerPlus (2016) 5:1034
and store a great quantity of information. For its excellent properties about memory, we can build a new model if the conventional resistors are replaced by the memristors in neural networks, which is called memristive neural networks. Some representative works studied on the properties of the memristive systems display its applicability in several interdisciplinary areas (see Bao and Zeng 2013; Guo et al. 2015; Wang et al. 2003; Wu et al. 2012; Wu and Zeng 2012; Wen and Zeng 2012; Zhao et al. 2015). From the description of memristive neural networks, combining memristors with infinite mem-ory is extremely interesting. An advantage of fractional-order systems in comparison to integer-order systems is that fractional-order systems can generate infinite memory. Therefore, merging the memristors into a class of fractional-order neural networks is pretty anticipated. Although stability analysis of fractional-order memristive or mem-ristor-based neural networks has been gradually carried out (see Chen et al. 2014, 2015; Rakkiyappan et al. 2014, 2015b; Velmurugan and Rakkiyappan 2016; Velmurugan et al. 2016), it is worth noting that fractional-order memristive neural networks can exhibit complicated dynamics or chaotic behaviors if the network’s parameters and time delays are appropriately specified.
Noticed that many static or dynamic control laws have been designed to stabilize nonlinear control systems, for instance, Chandrasekar and Rakkiyappan (2016), Chen et al. (2015), Guo et al. (2013), Huang et al. (2009), Lou et al. (2013), Mathiyalagan et al. (2015), Rakkiyappan et al. (2015a), Wu et al. (2016), Yang and Tong (2016). In allusion to different system structures and actual control requirements, lots of stabilization crite-ria are established, for example, periodic intermittent stabilization (Huang et al. 2009), robust stabilization (Yang and Tong 2016), finite-time stabilization (Zhang et al. 2016), impulsive stabilization (Chandrasekar and Rakkiyappan 2016; Huang 2010; Lou et al. 2013). Despite these fruitful achievements, some stabilization approaches can hardly be widely applied in practical problems due to high gain. In addition, an undeniable fact is that stabilization control schemes of fractional-order systems is little studied. Hence, it is necessary to investigate some appropriate controllers for stabilization of fractional-order systems.
Inspired by the above discussion, in this article, we will study the global O(t−α) stabi-lization problem for a class of fractional-order memristive neural networks with time delays. We first introduce the concepts about fractional calculation and global stabiliza-tion of fractional-order systems. Secondly, for exploring some simple useful controllers, linear state feedback control law and linear output feedback control law are designed to stabilize the fractional-order systems. In addition, stabilization criteria in form of alge-braic inequalities are derived by utilizing a new fractional Lyapunov method instead of classical Gronwall inequality. The conditions can be easily verified.
Fractional calculation and model descriptionFractional calculation concepts
First of all, some basics of fractional calculation are given which will be used in the later.
Definition 1 (Chen and Chen 2016) The fractional integral with fractional order α > 0 of function f(t) is defined as

Page 3 of 22Liu et al. SpringerPlus (2016) 5:1034
where t ≥ t0, Ŵ(·) is the Gamma function, that is
Definition 2 (Chen and Chen 2016) The Riemann–Liouville derivative with fractional order α > 0 of function f(t) is defined as
where t ≥ t0, n− 1 < α < n, n is a positive integer. Moreover, when 0 < α < 1, that is
Definition 3 (Chen and Chen 2016) The Caputo derivative with fractional order α > 0 of function f ∈ Cn+1([t0,+∞),R) is defined as
where t ≥ t0, n− 1 < α < n, n is a positive integer. Moreover, when 0 < α < 1, that is
Lemma 1 (Chen and Chen 2016) If f ∈ C1([0,+∞),R), then the following properties hold:
(1) Ct0Dαt f (t) =
RLt0Dαt f (t)−
f (t0)Ŵ(1−α)
(t − t0)−α.
(2) If f(t) and ϑ and their all derivatives are continuous in [t0, t], then Leibniz rule for fractional differentiation can be expressed as follows:
where 0 < α < 1, n ≥ α,
and
RLt0D−αt f (t) =
1
Ŵ(α)
∫ t
t0
(t − s)α−1f (s)ds,
Ŵ(α) =
∫ ∞
0
sα−1e−sds.
RLt0Dαt f (t) =
1
Ŵ(n− α)
dn
dtn
∫ t
t0
f (s)
(t − s)α−n+1ds,
RLt0Dαt f (t) =
1
Ŵ(1− α)
d
dt
∫ t
t0
f (s)
(t − s)αds.
Ct0Dαt f (t) =
1
Ŵ(n− α)
∫ t
t0
f (n)(s)
(t − s)α−n+1ds,
Ct0Dαt f (t) =
1
Ŵ(1− α)
∫ t
t0
f′(s)
(t − s)αds.
RLt0Dαt (ϑ(t)f (t)) =
n∑
k=0
dkϑ(t)
dtk
(α
k
)RLt0Dα−kt f (t)− Rα
n ,
Rαn(t) =
(−1)n(t − α)n−α+1
n!Ŵ(−α)
∫ 1
0
∫ 1
0
Fα(t, ξ , η)dξdη,
Fα(t, ξ , η) = f (t0 + η(t − t0))ϑn+1(t0 + (t − t0)(ξ + η − ξη)),

Page 4 of 22Liu et al. SpringerPlus (2016) 5:1034
Model description
Consider the fractional-order memristive neural networks with time delays (FMDNNs) described by the following fractional-order equations: for i = 1, 2, . . . , n,
where 0 < α < 1, n is the number of neurons in the networks, xi(t) is the state variable of the ith neuron, gj(·), fj(·) denotes the output of the jth unit at time t and t − τ (t), respectively, and gj(0) = fj(0) = 0. τ (t) corresponds to the transmission delay at time t and 0 ≤ τ (t) ≤ τ. ui(t) denotes the external input, aij(xj(t)) and bij(xj(t)) represent memristive weights, which are defined as:
for i, j = 1, 2, . . . , n, aij(±T j) = aij or aij , bij(±T j) = bij or bij , where the switching jumps Tj > 0, aij, aij, bij, and bij are constants.
Remark 1 Note that aij(xj(t)) and bij(xj(t)) are discontinuous in system (1), then the classical definition of solution for differential equations cannot be applied to (1). To deal with this issue, we introduce the concept of Filippov solution.
Definition 4 (Rakkiyappan et al. 2014) For system Ct0Dαt x(t) = g(x), 0 < α < 1, x ∈ R
n, with a discontinuous right-hand side, a set-valued map is defined as
where co[E] is the closure of convex hull of set E, B(x, δ) = {y : �y− x� ≤ δ}, and µ(N ) is a Lebesgue measure of set N. If x(t), t ∈ [t0,T ], is called the solution in Filippov sense of the Cauchy problem for system Ct0D
αt x(t) = g(x), 0 < α < 1, x ∈ R
n, with initial condi-tion x(t0) = x0, when it is absolutely continuous, and satisfies the differential inclusion as follows:
For FMDNNs (1), define the set-value maps
(α
k
)=
Ŵ(α + 1)
k!Ŵ(α − k + 1).
(1)
Ct0Dαt xi(t) = − xi(t)+
n∑
j=1
aij(xj(t))gj(xj(t))
+
n∑
j=1
bij(xj(t))fj(xj(t − τ (t)))+ ui(t),
(2)aij(xj(t)) =
{aij ,
∣∣xj(t)∣∣ > Tj ,
aij ,∣∣xj(t)
∣∣ < Tj ,bij(xj(t)) =
{bij ,
∣∣xj(t)∣∣ > Tj ,
bij ,∣∣xj(t)
∣∣ < Tj ,
ψ(x) =⋂
δ>0
⋂
µ(N )=0
co[g(B(x, δ)\N )],
Ct0Dαt x(t) ∈ ψ(x), for a.e. t ∈ [t0,T ].

Page 5 of 22Liu et al. SpringerPlus (2016) 5:1034
for i, j = 1, 2, . . . , n, where co{aij , aij} denotes the closure of convex hull generated by real numbers aij and aij, co{bij , bij} denotes the closure of convex hull generated by real num-bers bij and bij.
Throughout this article we denote amij = max1≤i,j≤n{|aij|, |aij|}, bmij = max1≤i,j≤n
{|bij|, |bij|}. For n-dimensional vector v = (v1, v2, . . . , vn)T, the norm of vector v is
recorded as �v� =∑n
i=1 |vi|. Cτ := C([−τ , 0],R) is a Banach space of all continuous functions ϕ : [−τ , 0] → R. For ϕ ∈ Cτ, let �ϕ�C = sups∈[−τ ,0] �ϕ(s)�.
Throughout this article, let us suppose: the activation functions gi, fi, i = 1, 2, . . . , n, are global Lipschitz, that is, for all u, v ∈ R, there exist positive constants Gi, Fi such that
The objective of this article is to investigate the global O(t−α) stabilization problem for system (1). Therefore, the stabilization problem will be converted to find the suit con-troller ui(t) (i = 1, 2, . . . , n) such that zero solution of the closed-loop system of (1) is globally O(t−α) stable.
From the theories of differential inclusions and set-valued maps, the Filippov solution of FMDNNs (1) can be defined in the following form.
Definition 5 A function x(t) = (x1(t), x2(t), . . . , xn(t))T is said to be a Filippov solu-
tion of FMDNNs (1) on [0, T) with initial conditions x(s) = ϕ(s), s ∈ [−τ , 0], if x(t) is absolutely continuous on any compact interval of [0, T), and
for t ≥ t0, i = 1, 2, . . . , n. Or equivalently, for i, j = 1, 2, . . . , n, there exist γ aij (xj(t)) ∈ K (aij(xj(t))), γ b
ij (xj(t)) ∈ K (bij(xj(t))) such that
K (aij(xj(t))) =
aij ,��xj(t)
�� > Tj ,
co�aij , aij
�,
��xj(t)�� = Tj ,
aij ,��xj(t)
�� < Tj ,
K (bij(xj(t))) =
bij ,��xj(t)
�� > Tj ,
co�bij , bij
�,
��xj(t)�� = Tj ,
bij ,��xj(t)
�� < Tj ,
∣∣gi(u)− gi(v)∣∣ ≤ Gi|u− v|,
∣∣fi(u)− fi(v)∣∣ ≤ Fi|u− v|.
(3)
Ct0Dαt xi(t) ∈ −xi(t)+
n∑
j=1
K (aij(xj(t)))gj(xj(t))
+
n∑
j=1
K (bij(xj(t)))fj(xj(t − τ (t)))+ ui(t),
(4)
Ct0Dαt xi(t) = −xi(t)+
n∑
j=1
γ aij (xj(t))gj(xj(t))
+
n∑
j=1
γ bij (xj(t))fj(xj(t − τ (t)))+ ui(t).

Page 6 of 22Liu et al. SpringerPlus (2016) 5:1034
Remark 2 Based on the definitions of Filippov solution and fractional-order differential inclusion, we know that FMDNNs (1) is equivalent to the fractional-order differential inclusion (3) in the Filippov framework.
Next, definitions of global O(t−α) stability and global O(t−α) stabilization are given.
Definition 6 [Global O(t−α) stability] The zero solution of FMDNNs (1), where ui(t) = 0, is said to be globally O(t−α) stable if there exists a positive constant M such that �x(t, t0,ϕ)� ≤ M�ϕ�CO(t−α) for any ϕ ∈ Cτ and t ≥ t0.
Definition 7 [Global O(t−α) stabilization] FMDNNs (1) is said to be globally O(t−α) stabilized if there exists an appropriate feedback control law such that the closed-loop system of (1) is globally O(t−α) stable.
Main resultsState feedback control law
Two kinds of linear controller about state feedback are given, i.e., the linear controller without or with time delays. Firstly, we propose the following state control rule without time delays:
for i = 1, 2, . . . , n.
Theorem 1 FMDNNs (1) with the state feedback control rule (5) can be achieved global O(t−α) stabilization for any ϕ ∈ Cτ if there exist a constant r > τ and n positive constants βi (i = 1, 2, . . . , n) such that
for all i = 1, 2, . . . , n.
Proof Define two Lyapunov functions as follows:
and let
for t ≥ t0.
(5)ui(t) =
n∑
j=1
pijxj(t),
(6)
n∑
j=1
βjpij ≤ βi
(1−
1+ α
rαŴ(2− α)
)−
n∑
j=1
βj
(amij Gj +
(r
r − τ
)α
bmij Fj
),
(7)
{W (t) = max
{|xi(t)|βi
, i = 1, 2, . . . , n},
V (t) = (t − t0 + r)αW (t),
(8)
{W (t) = sup−τ≤θ≤t W (θ),
V (t) = sup−τ≤θ≤t V (θ),

Page 7 of 22Liu et al. SpringerPlus (2016) 5:1034
From Leibniz rule for fractional differentiation, we have
for t ≥ t0.By computing, it follows that
(9)
Ct0Dαt V (t) = RL
t0Dαt V (t)−
V (t0)
Ŵ(1− α)(t − t0)
−α
= RLt0Dαt
((t − t0 + r)αW (t)
)−
rαW (t0)
Ŵ(1− α)(t − t0)
−α
= (t − t0 + r)αRLt0 Dαt W (t)+
Ŵ(α + 1)
Ŵ(α)α(t − t0 + r)α−1RL
t0Dα−1t W (t)
+Ŵ(α + 1)
2Ŵ(α − 1)α(α − 1)(t − t0 + r)α−2RL
t0Dα−2t W (t)
− Rα2 (t)−
rαW (t0)
Ŵ(1− α)(t − t0)
−α
≤ (t − t0 + r)αCt0Dαt W (t)+ (t − t0 + r)α
W (t0)
Ŵ(1− α)(t − t0)
−α
+ α2(t − t0 + r)α−1RLt0Dα−1t W (t)
+α2(α − 1)2
2(t − t0 + r)α−2RL
t0Dα−2t W (t)−
rαW (t0)
Ŵ(1− α)(t − t0)
−α
≤ (t − t0 + r)αCt0Dαt W (t)+
[(t − t0 + r
t − t0
)α
−
(r
t − t0
)α] W (t0)
Ŵ(1− α)
+ α2(t − t0 + r)α−1RLt0Dα−1t W (t)
+α2(α − 1)2
2(t − t0 + r)α−2RL
t0Dα−2t W (t)
≤ (t − t0 + r)αCt0Dαt W (t)+ (1+ 2α)
V (t)
rαŴ(1− α)
+ α2(t − t0 + r)α−1RLt0Dα−1t W (t)
+α2(α − 1)2
2(t − t0 + r)α−2RL
t0Dα−2t W (t),
(10)
α2(t − t0 + r)α−1RLt0Dα−1t W (t) = α2(t − t0 + r)−(1−α)RL
t0D−(1−α)t W (t)
≤ α2(t − t0 + r)−(1−α) 1
Ŵ(1− α)W (t)
∫ t
t0
(t − s)−αds
≤ α2(t − t0 + r)−(1−α) (t − t0)1−α
(1− α)Ŵ(1− α)W (t)
≤ α2
(t − t0
t − t0 + r
)1−α 1
Ŵ(2− α)W (t)
≤α2
Ŵ(2− α)W (θ )
≤α2
rαŴ(2− α)V (t),

Page 8 of 22Liu et al. SpringerPlus (2016) 5:1034
and
for t ≥ t0, W (t) = W (θ ), where θ ∈ [−τ , t].From (9) to (11), we have
It is obvious that there exists a k ∈ {1, 2, . . . , n} such that
for given t ≥ t0.From (7) and (8), we have
(11)
α2(α − 1)2
2(t − t0 + r)α−2RL
t0Dα−2t W (t)
≤α2(α − 1)2
2(t − t0 + r)α−2 1
Ŵ(2− α)
∫t
t0
(t − s)1−αW (s)ds
≤α2(α − 1)2
2(t − t0 + r)α−2 W (t)
Ŵ(2− α)
∫t
t0
(t − s)1−αds
≤α2(α − 1)2
2(t − t0 + r)α−2 (t − t0)
2−αW (t)
(2− α)Ŵ(2− α)
≤α2(α − 1)2
2
(t − t0
t − t0 + r
)2−αW (t)
(2− α)Ŵ(2− α)≤
α2(α − 1)2
2
W (t)
(2− α)Ŵ(2− α)
≤α2(α − 1)2
2rα(2− α)Ŵ(2− α)V (t) ≤
α2
rαŴ(2− α)V (t),
(12)
Ct0Dαt V (t) ≤ (t − t0 + r)αCt0D
αt W (t)+
2α2
rαŴ(2− α)V (t)+
(1+ 2α)V (t)
rαŴ(1− α)
= (t − t0 + r)αCt0Dαt W (t)+
1+ α
rαŴ(2− α)V (t).
W (t) =|xk(t)|
βk,
(13)
Ct0Dαt W (t) =
1
βk
Ct0Dαt |xk (t)| ≤
1
βksgn(xk (t))
Ct0Dαt xk (t)
≤1
βksgn(xk (t))
−xk (t)+
n�
j=1
γ akj(xj(t))gj(xj(t))+
n�
j=1
γ bkj(xj(t))fj(xj(t − τ (t)))+
n�
j=1
pkjxj(t)
≤1
βksgn(xk (t))
−xk (t)+
n�
j=1
amkjGj |xj(t)| +
n�
j=1
bmkj Fj |xj(t − τ (t))| +
n�
j=1
pkjxj(t)
≤ −|xk (t)|
βk+
1
βk
n�
j=1
βjamkjGj
|xj(t)|
βj+
1
βk
n�
j=1
βjbmkj Fj
|xj(t − τ (t))|
βj+
1
βk
n�
j=1
βjpkj|xj(t)|
βj
≤ −W (t)+1
βk
n�
j=1
βj(amkjGj + pkj)W (t)+
1
βk
n�
j=1
βjbmkj FjW (t − τ (t))
≤ −
1− 1
βk
n�
j=1
βj(amkjGj + pkj)
W (t)+
1
βk
n�
j=1
βjbmkj FjW (t − τ (t)).

Page 9 of 22Liu et al. SpringerPlus (2016) 5:1034
And hence
where θ ∈ [−τ , t] such that V (t) = (t − t0 + θ + r)αW (t), when V (t) = V (t).From (12) and (14), we have
when V (t) = V (t).From (6), it follows that
for all t ≥ t0.On the basis of Definition 2 and Lemma 1, the following inequality holds
It yields
for t ≥ t0. Hence for i = 1, 2, . . . , n,
(14)
(t − t0 + r)αCt0Dαt W (t)
≤ −(t − t0 + r)α
1− 1
βk
n�
j=1
βj
�amkjGj + pkj
�W (t)
+ (t − t0 + r)α1
βk
n�
j=1
βjbmkjFjW (t − τ (t))
≤ −
1− 1
βk
n�
j=1
βj
�amkjGj + pkj
�V (t)+
(t − t0 + r)α
βk�t − t0 + r + θ
�αn�
j=1
βjbmkjFjV (t)
≤ −
1−
n�
j=1
βj
βk(amkjGj + pkj)−
�r
r + θ
�α n�
j=1
βj
βkbmkjFj
V (t)
≤ −
1−
n�
j=1
βj
βk
�amkjGj + pkj
�−
�r
r − τ
�α n�
j=1
βj
βkbmkjFj
V (t),
(15)
Ct0Dαt V (t) ≤ −
1−
n�
j=1
βj
βk(amkjGj + pkj)−
�r
r − τ
�α n�
j=1
βj
βkbmkj Fj
V (t)+
1+ α
rαŴ(2− α)V (t)
≤
−
1−
n�
j=1
βj
βk
�amkjGj + pkj
�−
�r
r − τ
�α n�
j=1
βj
βkbmkj Fj
+
1+ α
rαŴ(2− α)
V (t),
(16)Ct0Dαt V (t) ≤ 0,
1
Ŵ(1− α)
d
dt
∫ t
t0
V (s)
(t − s)αds ≤
V (t0)
Ŵ(1− α)(t − t0)
−α .
(17)V (t) ≤ V (t0),

Page 10 of 22Liu et al. SpringerPlus (2016) 5:1034
where βmin = min{βi, i = 1, 2, . . . , n}, for t ≥ t0, which implies
where � = 1βmin
∑ni=1 βi. Therefore, FMDNNs (1) can be achieved global O(t−α) stabili-
zation under the designed control law (5). �
In the following, we propose the following state control rule with time delays:
for i = 1, 2, . . . , n.
Theorem 2 FMDNNs (1) with the state feedback control rule (19) can be achieved global O(t−α) stabilization for any ϕ ∈ Cτ if there exist a constant r > τ and n positive constants βi (i = 1, 2, . . . , n) such that
for all i = 1, 2, . . . , n.
Proof Define two Lyapunov functions as follows:
and let
for t ≥ t0.Through Theorem 1, we have
It is obvious that there exists a k ∈ {1, 2, . . . , n} such that
(18)
|xi(t)| ≤ βiW (t)
= βiV (t)
(t − t0 + r)α≤ βi
V (t)
(t − t0 + r)α
≤ βiV (t0)
(t − t0 + r)α= βi
rαW (t0)
(t − t0 + r)α
≤βir
α�ϕ�C
βmin(t − t0 + r)α,
�x(t)� ≤�rα�ϕ�C
(t − t0 + r)α,
(19)ui(t) =
n∑
j=1
pijxj(t)+
n∑
j=1
qijxj(t − τ (t)),
(20)
n∑
j=1
βj
(pij +
(r
r − τ
)α
qij
)≤ βi
(1−
1+ α
rαŴ(2− α)
)−
n∑
j=1
βj
(amij Gj +
(r
r − τ
)α
bmij Fj
),
(21)
{W (t) = max
{|xi(t)|βi
, i = 1, 2, . . . , n},
V (t) = (t − t0 + r)αW (t),
(22)
{W (t) = sup−τ≤θ≤t W (θ),
V (t) = sup−τ≤θ≤t V (θ),
(23)Ct0Dαt V (t) ≤ (t − t0 + r)αCt0D
αt W (t)+
1+ α
rαŴ(2− α)V (t).

Page 11 of 22Liu et al. SpringerPlus (2016) 5:1034
for given t ≥ t0.From (21) and (22), we have
Hence
where θ ∈ [−τ , t] such that V (t) = (t + θ − t0 + r)αW (t), when V (t) = V (t).From (23) and (25), we have
when V (t) = V (t).From (20), it follows that
for all t ≥ t0.On the basis of Definition 3, we get
W (t) =|xk(t)|
βk,
(24)
Ct0Dαt W (t) ≤
1
βksgn(xk (t))
Ct0Dαt xk (t)
≤1
βksgn(xk (t))
−xk (t)+
n�
j=1
γ akj(xj(t))gj(xj(t))+
n�
j=1
γ bkj(xj(t))fj(xj(t − τ(t)))
+
n�
j=1
pkjxj(t)+
n�
j=1
qkjxj(t − τ(t))
≤1
βksgn(xk (t))
−xk (t)+
n�
j=1
amkjGj|xj(t)| +
n�
j=1
bmkj Fj|xj(t − τ(t))|
+
n�
j=1
pkjxj(t)+
n�
j=1
qkjxj(t − τ(t))
≤ −
1− 1
βk
n�
j=1
βj(amkjGj + pkj)
W (t)+
1
βk
n�
j=1
βj
�bmkj Fj + qkj
�W (t).
(25)
(t−t0+r)αCt0Dαt W (t) ≤ −
1−
n�
j=1
βj
βk
�amkjGj + pkj +
�r
r − τ
�α�bmkjFj + qkj
��V (t),
(26)
Ct0Dαt V (t) ≤ −
1−
n�
j=1
βj
βk
�amkjGj + pkj +
�r
r − τ
�α�bmkj Fj + qkj
��V (t)+
1+ α
rαŴ(2− α)V (t)
≤
−
1−
n�
j=1
βj
βk
�amkjGj + pkj +
�r
r − τ
�α�bmkj Fj + qkj
��+
1+ α
rαŴ(2− α)
V (t),
(27)Ct0Dαt V (t) ≤ 0,
(28)V (t) ≤ V (t0),

Page 12 of 22Liu et al. SpringerPlus (2016) 5:1034
for t ≥ t0. Hence for i = 1, 2, . . . , n,
where βmin = min{βi, i = 1, 2, . . . , n}, for t ≥ t0, it follows
where � = 1βmin
∑ni=1 βi. Therefore, FMDNNs can be achieved global O(t−α) stabiliza-
tion under the designed control law (19). �
Output feedback control law
Two kinds of linear controller about output feedback are given, i.e., the linear output feedback controller without or with time delays. Firstly, we propose the following output feedback control rule without time delays:
for i = 1, 2, . . . , n.
Theorem 3 FMDNNs (1) with the output feedback control rule (30) can be achieved global O(t−α) stabilization for any ϕ ∈ Cτ if there exist a constant r > τ and n positive constants βi (i = 1, 2, . . . , n) such that
for all i = 1, 2, . . . , n.
Proof Define two Lyapunov functions as follows:
and let
for t ≥ t0.Through Theorem 1, we have
It is obvious that there exists a k ∈ {1, 2, . . . , n} such that
(29)|xi(t)| ≤ βiW (t) ≤βir
α�ϕ�C
βmin(t − t0 + r)α,
�x(t)� ≤�rα�ϕ�C
(t − t0 + r)α,
(30)ui(t) =
n∑
j=1
ωijgj(xj(t)),
(31)
n∑
j=1
βjGjωij ≤ βi
(1−
1+ α
rαŴ(2− α)
)−
n∑
j=1
βj
(amij Gj +
(r
r − τ
)α
bmij Fj
),
(32)
{W (t) = max
{|xi(t)|βi
, i = 1, 2, . . . , n},
V (t) = (t − t0 + r)αW (t),
(33)
{W (t) = sup−τ≤θ≤t W (θ),
V (t) = sup−τ≤θ≤t V (θ),
(34)Ct0Dαt V (t) ≤ (t − t0 + r)αCt0D
αt W (t)+
1+ α
rαŴ(2− α)V (t).

Page 13 of 22Liu et al. SpringerPlus (2016) 5:1034
for given t ≥ t0.From (32) and (33), we have
And hence
where θ ∈ [−τ , t] such that V (t) = (t − t0 + θ + r)αW (t), when V (t) = V (t).From (34) and (36), we have
when V (t) = V (t).From (31), it follows that
for t ≥ t0.On the basis of Definition 3, we get
W (t) =|xk(t)|
βk,
(35)
Ct0Dαt W (t) =
1
βk
Ct0Dαt |xk(t)|
≤1
βksgn(xk(t))
Ct0Dαt xk(t)
≤1
βksgn(xk(t))
−xk(t)+
n�
j=1
γ akj(xj(t))gj(xj(t))+
n�
j=1
γ bkj(xj(t))fj(xj(t − τ (t)))
+
n�
j=1
ωkjgj(xj(t))
≤ −|xk(t)|
βk+
1
βk
n�
j=1
βjamkjGj
|xj(t)|
βj+
1
βk
n�
j=1
βjbmkj Fj
|xj(t − τ (t))|
βj
+1
βk
n�
j=1
βjωkjGj|xj(t)|
βj
≤ −
1− 1
βk
n�
j=1
βjGj
�amkj + ωkj
�W (t)+
1
βk
n�
j=1
βjbmkj FjW (t − τ (t)).
(36)
(t − t0 + r)αCt0Dαt W (t) ≤ −
1−
n�
j=1
βj
βk
�Gj
�amkj + ωkj
�+
�r
r − τ
�α
bmkjFj
�V (t),
(37)
Ct0Dαt V (t) ≤ −
1−
n�
j=1
βj
βk
�Gj
�amkj + ωkj
�+
�r
r − τ
�α
bmkjFj
�V (t)+
1+ α
rαŴ(2− α)V (t)
≤
−
1−
n�
j=1
βj
βk
�Gj
�amkj + ωkj
�+
�r
r − τ
�α
bmkjFj
�+
1+ α
rαŴ(2− α)
V (t),
(38)Ct0Dαt V (t) ≤ 0,

Page 14 of 22Liu et al. SpringerPlus (2016) 5:1034
for t ≥ t0. Hence for i = 1, 2, . . . , n,
where βmin = min{βi, i = 1, 2, . . . , n}, for t ≥ t0, which implies
where � = 1βmin
∑ni=1 βi. Therefore, FMDNNs (1) can be achieved global O(t−α) stabili-
zation under the designed control law (30). �
In the following, we propose the following output feedback control rule with time delays:
for i = 1, 2, . . . , n.
Theorem 4 FMDNNs (1) with the output feedback control rule (41) can be achieved global O(t−α) stabilization for any ϕ ∈ Cτ if there exist a constant r > τ and n positive constants βi (i = 1, 2, . . . , n) such that
for all i = 1, 2, . . . , n.
Proof Define two Lyapunov functions as follows:
and let
for t ≥ t0.Through Theorem 1, we have
It is obvious that there exists a k ∈ {1, 2, . . . , n} such that
(39)V (t) ≤ V (t0),
(40)|xi(t)| ≤ βiW (t) ≤βir
α�ϕ�C
βmin(t − t0 + r)α,
�x(t)� ≤�rα�ϕ�C
(t − t0 + r)α,
(41)ui(t) =
n∑
j=1
ωijgj(xj(t))+
n∑
j=1
ρij fj(xj(t − τ (t))),
(42)
n∑
j=1
βj
(Gjωij +
(r
r − τ
)α
Fjρij
)≤ βi
(1−
1+ α
rαŴ(2− α)
)−
n∑
j=1
βj
(amij Gj +
(r
r − τ
)α
bmij Fj
),
(43)
{W (t) = max
{|xi(t)|βi
, i = 1, 2, . . . , n},
V (t) = (t − t0 + r)αW (t),
(44)
{W (t) = sup−τ≤θ≤t W (θ),
V (t) = sup−τ≤θ≤t V (θ),
(45)Ct0Dαt V (t) ≤ (t − t0 + r)αCt0D
αt W (t)+
1+ α
rαŴ(2− α)V (t).
W (t) =|xk(t)|
βk,

Page 15 of 22Liu et al. SpringerPlus (2016) 5:1034
for given t ≥ t0.From (43) and (44), we have
Hence
where θ ∈ [−τ , t] such that V (t) = (t + θ − t0 + r)αW (t), when V (t) = V (t).From (45) and (47), we have
when V (t) = V (t).It follows that
for all t ≥ t0.On the basis of Definition 3, we get
for t ≥ t0. Hence i = 1, 2, . . . , n,
(46)
Ct0Dαt W (t) ≤
1
βksgn(xk (t))
Ct0Dαt0xk (t)
≤1
βksgn(xk (t))
−xk (t)+
n�
j=1
γ akj(xj(t))gj(xj(t))+
n�
j=1
γ bkj(xj(t))fj(xj(t − τ(t)))
+
n�
j=1
ωkjgj(xj(t))+
n�
j=1
ρkj fj(xj(t − τ(t)))
≤ −|xk (t)|
βk+
1
βk
n�
j=1
βjamkjGj
|xj(t)|
βj+
1
βk
n�
j=1
βjbmkj Fj
|xj(t − τ(t))|
βj
+1
βk
n�
j=1
βjωkjGj|xj(t)|
βj+
1
βk
n�
j=1
βjρkjFj|xj(t − τ(t))|
βj
≤ −[1−1
βk
n�
j=1
βjGj(amkj + ωkj)]W (t)+
1
βk
n�
j=1
βjFj(bmkj + ρkj)W (t).
(47)
(t − t0 + r)αCt0Dαt W (t) ≤ −
1−
n�
j=1
βj
βk
�Gj
�amkj + ωkj
�+
�r
r − τ
�α
Fj
�bmkj + ρkj
��V (t),
(48)
Ct0Dαt V (t) ≤ −
1−
n�
j=1
βj
βk
�Gj
�amkj + ωkj
�+
�r
r − τ
�α
Fj
�bmkj + ρkj
��V (t)+
1+ α
rαŴ(2− α)V (t)
≤
−
1−
n�
j=1
βj
βk
�Gj
�amkj + ωkj
�+
�r
r − τ
�α
Fj
�bmkj + ρkj
��+
1+ α
rαŴ(2− α)
V (t),
(49)Ct0Dαt V (t) ≤ 0,
(50)V (t) ≤ V (t0),
(51)|xi(t)| ≤ βiW (t) ≤βir
α�ϕ�C
βmin(t − t0 + r)α,

Page 16 of 22Liu et al. SpringerPlus (2016) 5:1034
where βmin = min{βi, i = 1, 2, . . . , n}, for t ≥ t0, it follows
where � = 1βmin
∑ni=1 βi. Therefore, FMDNNs (1) can be achieved global O(t−α) stabili-
zation under the designed control law (41). �
Remark 3 It needs to point out that fractional-order systems can be said rarely expo-nential stability. While, global Mittag–Leffler stability or global O(t−α) stability can be used to describe asymptotic stability of fractional-order systems. In consideration of the complex and rich nonlinear behaviors of fractional-order systems, especially, for the fractional-order systems with time delays, we employ global O(t−α) stabilization for a class of FMDNNs in Theorems 1–4.
Remark 4 As a useful tool, Lyapunov function method has been introduced to frac-tional-order systems by borrowing ideas from classical Lyapunov function method in integer-order systems. In Theorems 1–4, a class of new fractional Lyapunov functions have been established, which consist of two Lyapunov functions [i.e., time-invariant Lya-punov function W(t) and time-varying Lyapunov function V(t)]. For this structure of Lyapunov functions, we can regard the Caputo derivative of V(t) as two parts which can be estimated by means of Leibniz rule.
Numerical examplesIn this section, two numerical examples are given to show the effectiveness of the pro-posed theoretical results.
Example 1 Consider a two-dimensional FMDNNs as follows:
where α = 0.95, τ = 1, t0 = 0, gj(χ) = fj(χ) = tanh(χ) (j = 1, 2), and
It is obvious that we can get Gj = Fj = 1, j = 1, 2.
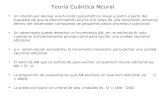
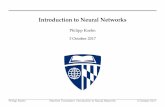
Figure 1 shows the results of time response of (52) without external controller, which implies that the state trajectory of (52) can not convergence to the origin.
Assume that there exist two positive constants β1 and β2 to satisfy
�x(t)� ≤�rα�ϕ�C
(t − t0 + r)α,
(52)
Ct0Dαt x1(t) = −x1(t)+ a11(x1(t))g1(x1(t))+ a12(x2(t))g2(x2(t))
+b11(x1(t))f1(x1(t − τ))+ b12(x2(t))f2(x2(t − τ))+ u1(t),Ct0Dαt x2(t) = −x2(t)+ a21(x1(t))g1(x1(t))+ a22(x2(t))g2(x2(t))
+b21(x1(t))f1(x1(t − τ))+ b22(x2(t))f2(x2(t − τ))+ u2(t),
a11(x1) =
{1.5, |x1| > 1,
2.0, |x1| < 1,a12(x2) =
{0.1, |x2| > 1,
0.2, |x2| < 1,a21(x1) =
{0.5, |x1| > 1,
0.4, |x1| < 1,
a22(x2) =
{1.8, |x2| > 1,
1.5, |x2| < 1,b11(x1) =
{−3.5, |x1| > 1,
−4.0, |x1| < 1,b12(x2) =
{−1.8, |x2| > 1,
−1.5, |x2| < 1,
b21(x1) =
{1.2, |x1| > 1,
1.0, |x1| < 1,b22(x2) =
{−1.8, |x2| > 1.
−1.5, |x2| < 1.

Page 17 of 22Liu et al. SpringerPlus (2016) 5:1034
it follows that there exists a positive constant r such that
which implies the conditions of Theorem 1 hold.From Example 1, we have
then we can choose p11 = −5, p12 = −2, p21 = −2, p22 = −3, i.e., the state feedback controller without time delays can be designed as follows:
(53)
{β1p11 + β2p12 ≤ β1
(1−
(am11G1 + bm
11F1))
+ β2(am12G2 + bm
12F2),
β2p22 + β1p21 ≤ β2(1−
(am22G2 + bm
22F2))
+ β1(am21G1 + bm
21F1),
β1p11 + β2p12 ≤ β1
�1− 1+α
rαŴ(2−α)−
�am11G1 +
�r
r−τ
�αbm11F1
��− β2
�am12G2 +
�r
r−τ
�αbm12F2
�,
β2p22 + β1p21 ≤ β2
�1− 1+α
rαŴ(2−α)−
�am22G2 +
�r
r−τ
�αbm22F2
��− β1
�am21G1 +
�r
r−τ
�αbm21F1
�,
{β1(p11 + 5)+ β2(p12 + 2) ≤ 0.
β2(p22 + 2.6)+ β1(p21 + 1.7) ≤ 0,
0 5 10 15 20 25
−3
−2
−1
0
1
2
3
t
x 1
0 5 10 15 20 25−3
−2
−1
0
1
2
3
t
x 2
Fig. 1 Transient behavior of x1(t) and x2(t) for (52) without external controller

Page 18 of 22Liu et al. SpringerPlus (2016) 5:1034
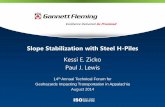
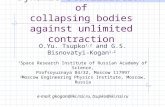
According to Theorem 1, system (52) can be achieved global O(t−α) stabilization. From Fig. 2, we can get that the state trajectory of the resulting closed-loop system of (52) with the designed control law (54) is globally O(t−α) stable.
Similarly, select the state feedback controller with time delays designed as follows:
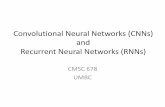
Then it follows from Theorem 2 that system (52) can be achieved global O(t−α) stabiliza-tion. From Fig. 3, we can get that the state trajectory of the resulting closed-loop system of (52) with the designed control law (55) is globally O(t−α) stable.
Example 2 Consider an one-dimensional FMDNNs as follows:
(54)
{u1(t) = −5x1(t)− 2x2(t).
u2(t) = −2x1(t)− 3x2(t).
(55)
{u1(t) = −7x1(t)− 3x2(t)+ 0.5x1(t − 1)− 0.1x2(t − 1).u2(t) = −3x1(t)− 5x2(t)+ 0.1x1(t − 1)− 0.5x2(t − 1).
0 5 10 15 20−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
t
x 1
0 5 10 15 20 25
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
t
x 2
Fig. 2 Transient behavior of x1(t) and x2(t) for (52) with state feedback control rule u1(t) = −5x1(t)−
2x2(t), u2(t) = −2x1(t)− 3x2(t)

Page 19 of 22Liu et al. SpringerPlus (2016) 5:1034
where α = 0.5, τ = 1, t0 = 0, g(χ) = sin(χ), f (χ) = tanh(χ), and
It is obvious that we can obtain G = F = 1.
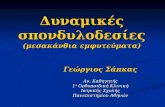
Figure 4 shows the results of time response of (56) without external controller, which implies that the state trajectory of (56) can not convergence to the origin.
In order to apply Theorem 3, the following inequality needs to be satisfied
then we can choose ω = −5, i.e., the state feedback controller without time delays can be designed as follows:
(56)Ct0Dαt x(t) = −x(t)+ a(x(t))g(x(t))+ b(x(t))f (x(t − τ))+ u(t),
a(x) =
{1.0, |x| > 1,1.2, |x| < 1,
b(x) =
{−4.8, |x| > 1.−3.5, |x| < 1.
(57)ω + 5 ≤ 0,
(58)u(t) = −5 sin(x).
0 5 10 15−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
t
x 1
0 5 10 15−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
t
x 2
Fig. 3 Transient behavior of x1(t) and x2(t) for (52) with state feedback control rule u1(t) = −7x1(t)− 3x2(t)+ 0.5x1(t − 1)− 0.1x2(t − 1), u2(t) = −3x1(t)− 5x2(t)+ 0.1x1(t − 1)− 0.5x2(t − 1)

Page 20 of 22Liu et al. SpringerPlus (2016) 5:1034
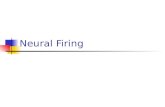
It follows from Theorem 3 that system (56) can be achieved global O(t−α) stabilization. From Fig. 5, we can get that the state trajectory of the resulting closed-loop system of (56) with the designed control law (58) is globally O(t−α) stable.
Similarly, select the output feedback controller with time delays designed as follows:
Then it follows from Theorem 4 that system (56) can be achieved global O(t−α) stabiliza-tion. From Fig. 6, we can get that the state trajectory of the resulting closed-loop system of (56) with the designed control law (59) is globally O(t−α) stable.
Concluding remarksIn this article, we exploit the global O(t−α) stabilization for a class of fractional-order memristive neural networks with time delays. The main theoretical results of this article are that the linear state feedback control law and the output feedback control law are
(59)u(t) = −7 sin(x)− tanh(x − 1).
0 5 10 15−3
−2
−1
0
1
2
3
t
x
Fig. 4 Transient behavior of x(t) for (56) without external controller
0 5 10 15−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
t
x
Fig. 5 Transient behavior of x(t) for (56) with output feedback control rule u(t) = −5 sin(x)

Page 21 of 22Liu et al. SpringerPlus (2016) 5:1034
constructed to stabilize the fractional systems. In addition, some sufficient conditions ensuring to stabilize fractional-order systems are also given in terms of algebraic ine-qualities according to a new fractional Lyapunov function and a fractional-order differ-ential inequality skill. The article provides a novel way to construct a Lyapunov function and a new method to deal with fractional-order inequalities, which may be applied to discuss other properties or analyze other more complex systems such as the fractional-order form of the model explored in the literatures Chandrasekar and Rakkiyappan (2016), Lou et al. (2013), Shang (2014, 2015, 2016), Wang et al. (2003), Yang and Tong (2016) and so on. Future research will focus on these issues.Authors’ contributionsLL wrote the draft of this article. AW provided the idea of this article. XS offered the composition and polished English expression. All authors read and approved the final manuscript.
Author details1 College of Mathematics and Statistics, Hubei Normal University, Huangshi 435002, China. 2 School of Mechanical Engi-neering, Southwest Jiaotong University, Chengdu 610031, China.
AcknowledgementsThe authors thank the Associate Editor and the reviewers for their suggestions which have been very useful to improve the quality of article. The work is supported by the Natural Science Foundation of China under Grant 61304057.
Competing interestsThe authors declare that they have no competing interests.
Received: 25 February 2016 Accepted: 19 May 2016
ReferencesBao G, Zeng ZG (2013) Multistability of periodic delayed recurrent neural network with memristors. Neural Comput Appl
23(7):1963–1967Chandrasekar A, Rakkiyappan R (2016) Impulsive controller design for exponential synchronization of delayed stochastic
memristor-based recurrent neural networks. Neurocomputing 173(3):1348–1355Chen BS, Chen JJ (2015) Razumikhin-type stability theorems for functional fractional-order differential systems and
applications. Appl Math Comput 254:63–69Chen BS, Chen JJ (2016) Global O(t−α) stability and global asymptotical periodicity for a non-autonomous fractional-
order neural networks with time-varying delays. Neural Netw 73:47–57Chen JJ, Zeng ZG, Jiang P (2014) Global Mittag–Leffler stability and synchronization of memristor-based fractional-order
neural networks. Neural Netw 51(3):1–8Chen LP, Wu RC, Cao JD, Liu JB (2015) Stability and synchronization of memristor-based fractional-order delayed neural
networks. Neural Netw 71:37–44
0 5 10 15−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
t
x
Fig. 6 Transient behavior of x(t) for (56) with output feedback control rule u(t) = −7 sin(x)− tanh(x − 1)

Page 22 of 22Liu et al. SpringerPlus (2016) 5:1034
Chua LO (1971) Memristor—the missing circuit element. IEEE Trans Circuit Theory 18(5):507–519Guo ZY, Wang J, Yan Z (2013) Global exponential dissipativity and stabilization of memristor-based recurrent neural
networks with time-varying delays. Neural Netw 48(6):158–172Guo ZY, Wang J, Yan Z (2015) Global exponential synchronization of two memristor-based recurrent neural networks
with time delays via static or dynamic coupling. IEEE Trans Syst Man Cybern Syst 45(2):235–249Huang YC (2010) On a stabilization problem of nonlinear programming neural networks. Neural Process Lett
31(2):93–103Huang JJ, Li CD, Han Q (2009) Stabilization of delayed chaotic neural networks by periodically intermittent control.
Circuits Syst Signal Process 28(4):567–579Li HL, Jiang YL, Wang ZL, Zhang L, Teng ZD (2015) Global Mittag–Leffler stability of coupled system of fractional-order
differential equations on network. Appl Math Comput 270:269–277Liang S, Wu RC, Chen LP (2015) Comparison principles and stability of nonlinear fractional-order cellular neural networks
with multiple time delays. Neurocomputing 168:618–625Liu QX, Liu JK, Chen YM (2015) Non-diminishing relative error of the predictor–corrector algorithm for certain fractional
differential equations. Math Comput Simul 117:10–19Lou XY, Ye Q, Cui BT (2013) Impulsive stabilization of fuzzy neural networks with time-varying delays. Arab J Math
2(1):65–79Mathiyalagan K, Anbuvithya R, Sakthivel R, Park JuH, Prakash P (2015) Reliable stabilization for memristor-based reccurent
neural networks with time-varying delays. Neurocomputing 153:140–147Rakkiyappan R, Velmurugan G, Cao JD (2014) Finite-time stability analysis of fractional-order complex-valued memristor-
based neural networks with time delays. Nonlinear Dyn 78(4):2823–2836Rakkiyappan R, Sivasamy R, Cao JD (2015a) Stochastic sampled-data stabilizaiton of neural-network-based control
systems. Nonlinear Dyn 81:1823–1839Rakkiyappan R, Velmurugan G, Cao JD (2015b) Stability analysis of memristor-based fractional-order neural networks
with different memductance functions. Cogn Neurodyn 9(2):145–177Shang YL (2014) Average consensus in multi-agent systems with uncertain topologies and multiple time-varying delays.
Linear Algebra Appl 459(3):411–429Shang YL (2015) Group consensus of multi-agent systems in directed networks with noises and time delays. Int J Syst Sci
46(14):2481–2492Shang YL (2016) Consensus seeking over Markovian switching networks with time-varying delays and uncertain topolo-
gies. Appl Math Comput 273:1234–1245Stamova I (2014) Global Mittag–Leffler stability and synchronization of impulsive fractional-order neural networks with
time-varying delays. Nonlinear Dyn 77(4):1251–1260Strukov DB, Snider GS, Stewart DR, Williams RS (2008) The missing memristor found. Nature 453(7191):80–83Tour JM, He T (2008) The fourth element. Nature 453(7191):42–43Velmurugan G, Rakkiyappan R (2016) Hybrid projective synchronization of fractional-order memristor-based neural
networks with time delays. Nonlinear Dyn 83(1):419–432Velmurugan G, Rakkiyappan R, Cao JD (2016) Finite-time synchronization of fractional-order memristor-based neural
networks with time delays. Neural Netw 73:36–46Wang X, Li CD, Huang TW, Duan SK (2003) Global exponential stability of a class of memristive neural networks with
time-varying delays. Neural Comput Appl 24(7):1707–1715Wang H, Yu YG, Wen GG, Zhang S (2014) Stability analysis of fractional-order neural networks with time delay. Neural
Netw 55:98–109Wen SP, Zeng ZG (2012) Dynamics analysis of a class of memristor-based recurrent networks with time-varying delays in
the presence of strong external stimuli. Neural Process Lett 35(1):47–59Wu AL, Zeng ZG (2012) Danamic behaviors of memristor-based recurrent neural networks with time-varying delays.
Neural Netw 36(8):1–10Wu AL, Zeng ZG (2016) Boundness, Mittag-L-effler stability asymptotical ω-periodicity of fractional-order fuzzy neural
networks. Neural Netw 74:73–84Wu AL, Wen SP, Zeng ZG (2012) Synchronization control of a class of memristor-based recurrent neural networks. Inf Sci
183(2):106–116Wu AL, Zeng ZG, Song XG (2016) Global Mittag–Leffler stabilization of fractional-order bidirectional associative memory
neural networks. Neurocomputing 177:489–496Yang W, Tong SC (2016) Robust stabilization of switched fuzzy systems with actuator dead zone. Neurocomputing
173:1028–1033Zhang LL, Huang LH, Cai ZW (2016) Finite-time stabilization control for discontinuous time-delayed networks: new
switching design. Neutal Netw 75:84–96Zhao H, Li LX, Peng HP, Kurths J, Xiao JH, Yang YX (2015) Anti-synchronization for stochastic memristor-based neural
networks with non-modeled dynamics via adaptive control approach. Eur Phys J B 88:109