GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM
75
GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE YONG-GEUN OH Abstract. We introduce a new package of Floer data of λ-sectorial almost complex structures J and sectorial Hamiltonians H on the Liouville sectors introduced in [GPS20, GPS18] the pairs of which are amenable to the max- imum principle for the analysis of pseudoholomorphic curves relevant to the studies of wrapped Fukaya categories and of symplectic cohomology. It is also amenable to the strong maximum principle in addition when paired with cylindrical Lagrangian boundary conditions. The present work answers to a question raised in [GPS20] concerning a characterization of almost complex structures and Hamiltonians in that all the relevant confinement results in the studies of wrapped Fukaya category, symplectic cohomology and closed-open (and open-closed) maps between them can be uniformly established via the maximum principle through tensorial calculations, Hamiltonian calculus and sign considerations without making any estimates. Along the way, we prove the existence of a pseudoconvex pair (ψ,J ) such that J is dλ-tame and ψ is an exhaustion function of Nbhd(∂∞M ∪ ∂M) that also satisfies the equation -dψ ◦ J = λ thereon for any Liouville sector with corners (M,λ). Contents 1. Introduction 2 1.1. Pseudoconvex pairs and end-profile functions 3 1.2. λ-sectorial almost complex structures 5 1.3. Sectorial Hamiltonians 8 1.4. Confinement theorems for Floer’s equations 10 1.5. Relation to other works 10 2. Recollections and preliminaries 11 2.1. List of conventions 11 2.2. Splitting data for boundaries 12 2.3. Splitting data for corners 13 2.4. Neighborhoods of ∂ ∞ M and of ∂M 14 Part 1. Geometry of Liouville sectors 16 3. Convex corner-smoothing functions of R k + 16 3.1. Octants 16 3.2. Symmetric convex corner smoothing of [0, ∞) 2 17 3.3. Compatible corner smoothing of [0, ∞) n 24 4. End-profile functions s ϕ of Liouville sectors 31 Date : October, 2021. Key words and phrases. Liouville sectors with corners, end-profile functions, maximum prin- ciple λ-sectorial almost complex structures, Sectorial Hamiltonians, cylindrical Lagrangian. This work is supported by the IBS project # IBS-R003-D1. 1 arXiv:2111.06112v2 [math.SG] 30 Dec 2021
Transcript of GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM
PRINCIPLE
YONG-GEUN OH
Abstract. We introduce a new package of Floer data of λ-sectorial almostcomplex structures J and sectorial Hamiltonians H on the Liouville sectors
introduced in [GPS20, GPS18] the pairs of which are amenable to the max-
imum principle for the analysis of pseudoholomorphic curves relevant to thestudies of wrapped Fukaya categories and of symplectic cohomology. It is
also amenable to the strong maximum principle in addition when paired withcylindrical Lagrangian boundary conditions. The present work answers to a
question raised in [GPS20] concerning a characterization of almost complex
structures and Hamiltonians in that all the relevant confinement results in thestudies of wrapped Fukaya category, symplectic cohomology and closed-open
(and open-closed) maps between them can be uniformly established via the
maximum principle through tensorial calculations, Hamiltonian calculus andsign considerations without making any estimates. Along the way, we prove
the existence of a pseudoconvex pair (ψ, J) such that J is dλ-tame and ψ is
an exhaustion function of Nbhd(∂∞M ∪ ∂M) that also satisfies the equation−dψ ◦ J = λ thereon for any Liouville sector with corners (M,λ).
Contents
1. Introduction 21.1. Pseudoconvex pairs and end-profile functions 31.2. λ-sectorial almost complex structures 51.3. Sectorial Hamiltonians 81.4. Confinement theorems for Floer’s equations 101.5. Relation to other works 102. Recollections and preliminaries 112.1. List of conventions 112.2. Splitting data for boundaries 122.3. Splitting data for corners 132.4. Neighborhoods of ∂∞M and of ∂M 14
Part 1. Geometry of Liouville sectors 163. Convex corner-smoothing functions of Rk+ 163.1. Octants 163.2. Symmetric convex corner smoothing of [0,∞)2 173.3. Compatible corner smoothing of [0,∞)n 244. End-profile functions sϕ of Liouville sectors 31
Date: October, 2021.Key words and phrases. Liouville sectors with corners, end-profile functions, maximum prin-
ciple λ-sectorial almost complex structures, Sectorial Hamiltonians, cylindrical Lagrangian.
This work is supported by the IBS project # IBS-R003-D1.
1
arX
iv:2
111.
0611
2v2
[m
ath.
SG]
30
Dec
202
1

2 YONG-GEUN OH
4.1. Smoothing of the ceiling corner of Liouville sector 314.2. Smoothing profiles 334.3. The case with corners 355. Intrinsic geometry of end-profile functions and splitting data 366. Conformally Liouville deformation of Liouville forms 38
Part 2. Sectorial Floer data and the maximum principle 427. Set-up for the maximum principle 428. λ-sectorial almost complex structures 468.1. Remarks on the common choices of J 468.2. Definition of κ-sectorial almost complex structures 478.3. Existence of κ-sectorial almost complex structures 488.4. Definition of λ-sectorial almost complex structures 559. Sectorial Floer packages 569.1. Sectorial Hamiltonians and nonnegative isotopies 569.2. Sectorial Lagrangians 58
Part 3. Confinement theorems 5910. The curves we care about 5910.1. Structure maps of unwrapped Fukaya category 5910.2. Symplectic cohomology and its continuation map 6010.3. Closed-open maps and open-closed maps 6010.4. Quantitative measurements for the C0-estimates 6111. Confinement for the structure maps of unwrapped Fukaya categories 6212. Confinement theorems for symplectic cohomology 6413. Confinement for the continuation under nonnegative Liouville isotopies 6514. Confinement for closed-open and open-closed maps 6715. Construction of covariant inclusion functor 6815.1. Step 1: Choice of smoothing profiles 6815.2. Step 2: Choice of generating Lagrangian branes 6915.3. Step 3: Defining a λ-sectorial almost complex structure 7015.4. Step 4: Enlarging the generating collection to X ′ 7015.5. Step 5: Study of pseudoholomorphic curves on X ′ 70Appendix A. Discussion 70A.1. Monotonicity argument relies on the energy estimates 70A.2. Maximum principle does not rely on the energy estimates 71Appendix B. Giroux’s ideal completion and the asymptotically linear
framework 71B.1. Giroux’ notion of ideal Liouville domain 72B.2. ACI-sectorial Floer package in Liouville sectors 73Appendix C. Strong maximum principle and Z-invariance of Lagrangians 74References 75
1. Introduction
In [OT20], Tanaka and the present author constructed an unwrapped Floer the-ory for bundles of Liouville manifolds. The output was a collection of unwrapped

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 3
Fukaya categories associated to fibers of a Liouville bundle, along with a compati-bility between two natural constructions of continuation maps. This set-up allowedfor them to make the construction of Floer-theoretic invariants of smooth groupactions on Liouville manifolds, and they exploited these constructions in [OT19] toconstruct homotopically coherent actions of Lie groups on wrapped Fukaya cate-gories, thereby proving a version of a conjecture from Teleman’s 2014 ICM address.
In [OT20], the authors claimed that the same results hold for the case of Liouvillesectors [GPS20]. An anonymous referee pointed out a gap involving the existenceof almost-complex structures suitable for maximum-principle-type arguments (asopposed to monotonicity arguments). The present paper fills this gap.
We introduce a new framework of sectorial Floer data for Liouville sectors withcorners which is amenable both to the maximum principle and to the strong max-imum principle for the relevant pseudoholomorphic curves, both closed and openwith Z-invariant-at-infinity Lagrangian boundary condition, as well as Hamiltonian-perturbed ones are also confined away from the preferred direction of ∂M . (See (1.12)and Remark 1.7 for the explanation on what the main relevant issues and difficultiesare to identify such a class.)
1.1. Pseudoconvex pairs and end-profile functions. To apply a maximumprinciple argument—thereby preventing pseudoholomorphic curves from comingclose to the boundary ∂∞M ∪ ∂M– we need to use a barrier function
ψ : Int(M)⋂
Nbhd(∂∞M ∪ ∂M)→ R
that is plurisubharmonic with respect to given almost complex structure J . Thefollowing is one of our main results of the present paper.
Theorem 1.1. Let M be a Liouville sector (possibly with corners) with Liouvilleform λ. Then there exists a pair (ψ, J) such that
(1) The function ψ : Int(M)⋂
Nbhd(∂∞M ∪ ∂M)→ R is an exhaustion func-tion with compact level sets that blows-up along ∂∞M ∪ ∂M .
(2) J is a dλ-tame almost-complex structure defined on IntM such that ψ isplurisubharmonic with respect to J , i.e., satisfies
−d(dψ ◦ J) ≥ 0
as a (1, 1)-current.(3) The function ψ ◦u is amenable to the strong maximum principle for any J-
holomorphic map u : Σ→M satisfying the boundary condition u(∂Σ) ⊂ Lfor any Lagrangian submanifold L that is Z-invariant at infinity.
We call a pair (ψ, J) satisfying the first two conditions a pseudoconvex pair.(Definition 7.1).
Remark 1.2. Recall that the second condition is the well-known standard condi-tion both in several complex variables and in symplectic geometry in relation tothe study of pseudoholomorphic curves. The first condition is also a natural condi-tion that often appears in the L2-theory of several complex variables, especially onpseudoconvex domains. The function of the type ψ is used as the weight functionin the definition of relevant weighted Sobolev spaces. (See [Hor] for example.)
The fundamental difficulty of finding such a pair (ψ, J) in relation to the wrappedFukaya category on Liouville sectors from [GPS20] lies in the requirement of makingthe pseudoconvex pair (ψ, J) also amenable to the strong maximum principle

4 YONG-GEUN OH
• both for the boundary value problem of J-holomorphic curves under theboundary condition of the Z-invariant-at-infinity Lagrangian submanifoldsL, and• for the Hamiltonian-perturbed Cauchy-Riemann equations appearing in the
construction of Floer cohomology and its continuation maps.
Confinement results for the relevant pseudoholomorphic curves are crucial for theconstruction of wrapped Fukaya category obtained by the wrapping localization viathe relevant wrapping Hamiltonians. Note that the confinement result for the lattercase cannot be proved by a direct monotonicity argument which complicates thematter and forces [GPS20] to employ rather complex notion of dissipative Hamil-tonians for the purpose.
For the purpose of making the pseudoconvex pair (ψ, J) to satisfy the first re-quirement, it is enough for (ψ, J) to the following stronger condition.
Definition 1.3 (Liouville pseudoconvex pairs). We call a pseudoconvex pair (ψ, J)Liouville pseudoconvex if it satisfies
− dψ ◦ J = λ. (1.1)
We note from the definition of Liouville sectors [GPS20] that geometric natures of∂∞M and ∂M are quite different: ∂∞M is of contact-type while ∂M is ‘flat’ in thatit is contained in a level set of ‘linear’ function R : Nbhd(∂M)→ R. More generallyfor the Liouville sectors with corners, the boundary ∂M carries the structure of pre-symplectic manifolds with corners as any coisotropic submanifold of M with cornersdoes. This different geometric nature of ∂∞M and ∂M is one source of difficultyconstructing such a pseudoconvex pair and requires us to carefully analyze thegeometry of neighborhoods of DM , especially when the sector ∂M has corners.
Construction of aforementioned pseudoconvex pair will be carried out by care-fully designing the end-profile function, that provide a smoothing—of both ∂M(as M may be a manifold with corners) and ∂∞M ∩ ∂M (where the ideal contactboundary “meets” the boundary strata of M). We write
DM := ∂∞M ∪ ∂M (1.2)
and call it the full boundary of the ideal completion of M . Our Floer data (J,H),depend on this choice, so we outline the construction of this end-profile functionand this dependency briefly. Details are in Section 4.
Definition 1.4 (Smoothing profile). Given a Liouville sector M , a smoothing pro-file for M is the data of the following choices:
(1) A splitting data (Fδ, {(Rδ,i, Iδ,i)}kδi=1) at each corner Cδ of M (See Propo-sition 2.3 and Condition 4.5 below),
(2) Convex functions ϕ = ϕk : Rk>0 → R for every codimension k stratum of
∂M which is a family defined on the universal model Rk+1>0 for a chart of
manifolds with corners. (See Definition 3.17 for the precise definition), and(3) A choice of a contact-type hypersurface S0 and its associated symplectiza-
tion coordinate s satisfying Z[s] = 1.
Given a smoothing profile, we will first define a canonical end-profile functiondenoted by
sϕ

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 5
which is obtained as follows. With a choice of a symplectization radial function s,we consider functions which, near a point of the corner ∂M ∩ ∂∞M , take the form
− logϕ(R1, . . . , Rk, e
−s) . (1.3)
By gluing these locally defined functions together, we obtain a single end-profilefunction
sϕ : IntM ∩Nbhd(∂∞M ∪ ∂M)→ R. (1.4)
Its level sets provide smoothings not just near ∂M , but also near the ideal corners∂∞M ∩ ∂M .
Remark 1.5 (Sectorial almost complex structures versus λ-sectorial ones). Givena smoothing profile and its associated end-profile function, we will define a plentifuland contractible collection of almost complex structures, called the sectorial almost-complex structures in [Oh21], where they are paired with a class of Lagrangianbranes that are called gradient-sectorial Lagrangians. In the present paper, we stilladopt the standard class of cylindrical(i.e., Z-invariant-at-infinity) Lagrangians asthe branes of Fuk(M). However this choice of sectorial ones cannot be paired withthe Z-invariant Lagrangians for the application of strong maximum principle. Itturns out constructing such a Liouville pseudoconvex pair is a highly nontrivial taskand forces us to consider a deformation of Liouville forms which changes the givenLiouville structure of (M,λ) along the way as a step towards the final constructionthereof.
1.2. λ-sectorial almost complex structures. Let (M,λ) be equipped with asmoothing profile and let sϕ its end-profile function.
For the construction of wrapped Fukaya category Fuk(M) on a Liouville manifoldor a sector, the choices of almost complex structures and Hamiltonians are made sothat some confinement theorems for the relevant (perturbed) pseudoholomorphiccurves hold. To achieve these confinement theorems via the maximum and thestrong maximum principle, we will require J to satisfy
− ds ◦ J = λ (1.5)
at infinity and− dR ◦ J = π∗FλF + π∗CλC(= λ− df) (1.6)
near boundary, away from the corner Nbhd(∂∞M ∩ ∂M). (See Proposition 2.3 forthe unexplained notations here.) We mentioned that (1.6) is defined only near ∂M .
The main task then is to interpolate the two requirements on the intersectionNbhd(∂∞M ∩∂M) in the way that relevant maximum and strong maximum princi-ple are still applicable. This construction of J cannot be done without going througha careful pointwise consideration of J to reveal what presents the obstruction to in-terpolating the two conditions so that Z-invariant Lagrangian boundary conditionbecomes amenable to the strong maximum principle. We will achieve constructionof such J in two steps.
1.2.1. Definition of κ-sectorial almost complex structures. In the first step, we in-terpolate the two requirements (1.5), (1.6) along the corner Nbhd(∂∞M ∩ ∂M) byconsidering the interpolation
λκ := λ− d((1− κ(R))f) (1.7)
for a suitable cut-off function κ : R → [0, 1] satisfying κ = 0 near ∂M and κ = 1further away from ∂M . (See Definition 6.1 for the precise description of κ.) We

6 YONG-GEUN OH
emphasize the facts that this form is globally defined and that the perturbationterm −d((1−κ(R))f) is not compactly supported. In particular, λκ is not Liouvilleequivalent to λ in the usual sense.
The following is the first step towards the definition of sectorial (resp. λ-sectorial)almost complex structures. This class of almost complex structures is introducedonly as a convenient vehicle for the proof of existence of λ-sectorial almost complexstructures, the main class of our interest in the present paper. Note that eachsplitting data
U := Nbhd(∂M) ∼= F × CRe≥0
provides an obvious foliation FF on U whose leaves are given by the submanifoldsF × {(x, y)}, (x, y) ∈ CRe≥0.
Definition 1.6 (κ-sectorial almost complex structures). Let κ : R → [0, 1] be acut-off function as above. We call a dλ-tame almost complex structure J on Mκ-sectorial if J satisfies the following:
(1) [FF is J-complex] In a neighborhood of NbhdZ(∂M) of ∂M , we require
J(T ∗F ⊕ 0span{dµi,dνi}ki=1
)⊂ T ∗F ⊕ 0span{dµi,dνi}ki=1
, (1.8)
and J restricts to an almost complex structure of contact-type on F .(2) [dsϕ is J-dual to λκ] On Nbhd(∂M ∪ ∂∞M) ∩ IntM ,
− dsϕ ◦ J = λκ (1.9)
for the deformed Liouville form λκ.
Obviously any κ-sectorial almost complex structure forms a pseudoconvex pairwith ψ = sϕ since the above duality requirement implies
−d(dsϕ ◦ J) = dλ ≥ 0.
Therefore the main task then is to adjust the pair (sϕ, J) with κ-sectorial J to anew pair (ψ, J ′) that also satisfies
−dψ ◦ J ′ = λ.
Remark 1.7. (1) It is easy to check that the condition (1.8) is equivalent tothe property of FF that its leaves are J-complex submanifolds of U =Nbhd2ε0(∂M). (See Section 8.2 for more discussion on this.)
(2) We would like to alert readers that the hypersurfaces s−1ϕ (r) may not be of
contact-type for the originally given Liouville form λ in that they may notbe transversal to the Liouville vector field Z near the smoothing corners.This will create some difficulty in applying the strong maximum principleagainst the end-profile function because the intersection L∩s−1
ϕ (r) may notbe Legendrian.
(3) We compare this failure of being of contact-type with the fact that everyLiouville sector M admits a convex completion M (i.e., admits an exhaus-tion function ψ whose level sets are compact hypersurfaces of contact-type),after the originally given Liouville sector is sufficiently enlarged in the hor-izontal direction. (See [GPS20, Lemma 2.31].) It would be interesting toquantify how much room we need to enlarge to make the boundary of anextended Liouville sector inside the convex completion transversal to theLiouville vector field in the completion defined in [GPS20, Lemma 2.31].

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 7
The above definition already makes the function sϕ amenable to the maximumprinciple for a J-holomorphic curves. However since the right hand side of (1.9) isperturbed from λ, one cannot apply the strong maximum principle for the class ofusual Z-invariant-at-infinity Lagrangian branes on a neighborhood ∂∞M especiallynear the corner ∂∞M ∩ ∂M .
Remark 1.8. At this stage, there are two possible routes one could take: one isto change the objects of Fuk(M) from the usual Z-invariant Lagrangians to someother types of Lagrangians amenable to the strong maximum principle. This routeis taken in the present author’s article [Oh21].
In the present paper, we unchange and keep the standard Z-invariant Lagrangiansas the objects of Fuk(M). Because of that, we need one more preparation by de-forming λκ back to λ before giving the final definition of the class of almost complexstructures that we are searching for.
1.2.2. Conformally Liouville deformation of Liouville forms. By definition, we have
λκ =
{λ away from ∂M
π∗CλC + π∗FλF (= λ− df) near ∂M
and dλκ = dλ = ω for all deformation function κ.The following deformation result is an important ingredient needed towards our
final definition.
Proposition 1.9 (Proposition 6.3). Let ω = dλ(= dλκ) with λ, λκ be as above.Then there exists a conformally Liouville diffeomorphism
φκ : (M,λ)→ (M,λκ)
that satisfies the following on a neighborhood Nbhd(∂∞M ∪ ∂M):
(1) φ∗κ(egλκ) = λ for some function g.(2) φκ is the time-one map of a time-dependent globally Lipschitz vector field
Xt in (F, (µ, ν)) coordinates.(3) Xt satisfies dπF (Xt) = 0 = dR(Xt). In particular φκ smoothly extends to
∂M and satisfies
dφκ(TF ⊕ 0TCRe≥0) ⊂ (TF ⊕ 0TCRe≥0
). (1.10)
We would like to emphasize that the diffeomorphism φκ is neither a symplecticdiffeomorphism nor a Liouville diffeomorphism, but only a conformally Liouvillediffeomorphism between λκ and λ in that
φ∗κ(egλκ) = λ
for some function g that is not compactly supported.Utilizing this proposition, we now arrive at the final definition of the class of
λ-sectorial almost complex structures that includes all the pull-backs of κ-sectorialones provided in Definition 8.17 by the diffeomorphisms.
Definition 1.10 (λ-sectorial almost complex structures). We equip (M,λ) with asmoothing profile and a κ-deformation λκ of λ. Consider the λκ-wiggled end-profilefunction defined by
sϕ,κ := sϕ ◦ φκ.We call an ω-tame almost complex structure J on M λ-sectorial if J satisfies thefollowing:

8 YONG-GEUN OH
(1) [FF is J-complex] In a neighborhood of NbhdZ(∂M) of ∂M , we require
J(T ∗F ⊕ 0span{dµi,dνi}ki=1
)⊂ T ∗F ⊕ 0span{dµi,dνi}ki=1
, (1.11)
and J restricts to an almost complex structure of contact-type on F .(2) [dsϕ,κ is J-dual to λ] On NbhdZ(∂M ∪ ∂∞M)
−dsϕ,κ ◦ J = λ
on a neighborhood Nbhd(∂∞M ∪ ∂M).
We denote byJsectλ = Jsect
λ (M)
the set of λ-sectorial almost complex structures.
Theorem 1.11. Let M be a Liouville sector and fix a smoothing profile for M(Definition 1.4). The space Jsect
λ is a nonempty contractible infinite dimensionalsmooth manifold.
Remark 1.12. Here are a few notable points in our definition of Jsectλ . We assume
that M is a Liouville sector without corners for the moment.
• In contrast to [GPS20], we do not demand the holomorphicity of the pro-jection map
πC = R+ iI : NbhdZ(∂M)→ C (1.12)
near ∂M except near the ceiling corner (F \F0×C)∩Nbhdε0(∂M). However,we do impose the condition that the foliation FF mentioned before is a J-complex foliation.• While we demand the common contact-type condition λ ◦ J = ds away
from ∂M , near the ceiling corner ∂∞M ∩ ∂M , we utilize the choice ofsmoothing profile to “interpolate” the contact-type ceiling ∂∞M and to theflat-type wall ∂M to construct a pseudoconvex pair (ψ, J) with ψ = sk+1,ϕ,especially on Nbhd(∂∞M ∩ ∂M). Here we say that ∂M is ‘of flat-type’ inthat the characteristic foliation of ∂M forms a trivial fibration
∂M
π∂M
��
Ψ // F × R
πF
��N∂M
ψ // F
(See [Oh21, Theorem 1.4, Theorem 1.7].)
Note that by construction the pair (sϕ,κ, J) with λ-sectorial J is a Liouvillepseudoconvex pair.
1.3. Sectorial Hamiltonians. Another important ingredient in defining the wrappedFukaya category and symplectic cohomology for Liouville sectors is to identify asuitable class of wrapping Hamiltonian functions whose Floer trajectories can onlypass through ∂M “in the correct direction”. (See [GPS20, Section 2.10.1 & Lemma4.21]. Also see [Oh01, KO01] for an early discussion of such directedness of Floertrajectories.)
Our effort of constructing pseudoconvex pairs (sϕ,κ, J), a wiggled end-profilefunction sϕ,κ and its adapted λ-sectorial almost complex structures J pays off sinceit makes very simple the definitions of Hamiltonians and nonnegative Hamilton-ian isotopies that are amenable to the maximum principle, as well as the strong

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 9
maximum principle for the Z-invariant Lagrangian boundary conditions: Comparethe simplicity of our definition of sectorial Hamiltonians (Definition 9.2) with thecomplexity of the definition of the dissipative Hamiltonians used in [GPS20] whichthey need to achieve the confinement results via the monotonicity arguments. Inthe sectorial framework, such complications are subsumed in our careful geometricpreparation of the description of background geometry of Liouville sectors relatedto smoothing of corners of the Liouville sectors. These are all structural results onthe underlying geometry of Liouville sectors (with corners) whose statements havelittle to do with pseudoholomorphic curves, although they are motivated by ouraim of achieving the C0-estimates via the maximum principle. (See Part I of thepresent paper.)
The following is the key identity that holds for any λ-sectorial almost complexstructure, which motivates our simple definition of sectorial Hamiltonians below.
Proposition 1.13 (Proposition 12.2). Assume J is a λ-sectorial almost complexstructure. Consider the function H of the type
H = ρ(sϕ,κ)
for a smooth function ρ : R→ R. Then for any solution of
(du−XH(u)⊗ dt)(0,1)J = 0, (1.13)
we have
∆(sϕ,κ ◦ J) =1
2|du−XH(u)⊗ dt|2J − ρ′(sϕ,κ)
∂
∂τ(sϕ,κ ◦ u). (1.14)
Definition 1.14 (Sectorial Hamiltonians). Let (M,λ) be a Liouville sector andfix a smoothing profile (Definition 1.4) for M . Let sϕ,κ be the associated end-profile function. We call a Hamiltonian H : M → R sectorial (with respect to thesmoothing profile) if
H = ρ(sϕ,κ)
on a neighborhood Nbhd(∂∞M ∪ ∂M) for some smooth function ρ : R→ R+ withρ′ > 0.
We will give the precise description of the above mentioned neighborhoods
Nbhd(∂∞M ∪ ∂M)
and Nbhd(∂∞M ∩ ∂M) in Section 9.1.
Remark 1.15. Our usage of these smoothing profiles and sectorial packages replacethe smoothing operations omnipresent in [GPS20] and other literature to study theKunneth-type theorems by absorbing the smoothing process into the definition ofsectorial package. (See [Oan06], [GPS20, Subsection 2.5], [GPS18, Subsection 9.3.3]for example.) See [GPS20, Conjecture 3.40 & Conjecture 4.39] for the relevantconjectures. We will study these conjectures elsewhere. For this purpose, we havealready identified a correct class of branes that is monoidal, which we call gradient-sectorial Lagrangians in [Oh21].

10 YONG-GEUN OH
1.4. Confinement theorems for Floer’s equations. The main utility of secto-rial Hamiltonians and almost complex structures is to establish confinement resultsfor (Hamiltonian-perturbed) pseudoholomorphic curves using the maximum prin-ciple, and the strong maximum principle relative to the Z-invariant Lagrangiansubmanifolds on Nbhd(∂∞M ∪ ∂M).
We establish confinement results all by the maximum principle with respectto the λ-sectorial J (and to the cylindrical Lagrangians for the strong maximumprinciple) in:
• Theorem 12.1 (for symplectic cohomology)• Theorem 13.1 (for continuation via nonnegative Hamiltonian isotopies)• Theorem 11.3 (for A∞ structure maps) and• Theorem 14.1 (for closed-open maps).
Once these confinement results are established, construction of covariantly func-torial inclusion function Fuk(X) → Fuk(X ′) for the inclusion of Liouville sectorsX ↪→ X ′ follows the same procedure as given in [GPS20, Section 3.4], with thecaveat that J is defined only on M \ ∂M . This singularity-near-the-boundary in-troduces minor inconveniences in the proof which are easily overcome by beingcareful about choices along the way. (We elaborate this point in Subsection 13.)
1.5. Relation to other works. In [GPS20, 2.10.1,2.10.3], the authors opine itwould be an “important technical advance” to identify a class of almost complexstructures and Hamiltonians on Liouville sectors that guarantee the maximum prin-ciple and render the projection to T ∗[0,∞)k holomorphic. (See (1.12) and Remark1.7 for some difficulties in pinpointing a class.) As mentioned above, we accomplishthis task, with the caveat that J is defined only on M \ ∂M .
The present author came to need this technical advance in [OT20], where theauthors thereof construct an unwrapped Floer theory for bundles of Liouville man-ifolds, and made the (then-incorrect) claim that this theory extended to bundlesof Liouville sectors. As a referee pointed out, one did not know of a good classof almost-complex structures on sectors suitable for maximum-principle-type ar-guments (as opposed to monotonicity arguments) at the time when the originalversion of [OT20] first appeared. By constructing a λ-sectorial almost complexstructure, we provides such a class which also pairs with the sectorial HamiltonianH in the way that all confinement theorems for perturbed (J,H)-curves can beeasily proved for Z-invariant Lagrangian branes by the maximum principle. (SeePart III of the present paper.)
Remark 1.16. Let us explain why the proof of C0-estimates via the maximumprinciple will be important when considering bundles of Liouville sectors. It issomewhat awkward to state the relevant C0 estimates by monotonicity argumentson bundles: This is because the total space of a family will be neither symplecticnor almost complex so no monotonicity argument can be applied on the nose.
Finally, we would like to mention that there is a much simpler way of definingthe sectorial Floer data in the asymptotically-cylindrical-at-infinity (ACI) analyticalframework of Bao [Bao15, Bao16] (see also [OW18]) in terms of Giroux’s notionof ideal Liouville domains and completions. We call them the ACI-sectorial Floerdata. In this ACI framework, all ACI Floer data is defined through Giroux’s notionof ideal Liouville domains (or sectors) and then just restrict them to W \∂∞W . Thisrestriction process becomes natural in the ACI framework but not in the standard

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 11
cylindrical-at-infinity (CI) analytical framework. Nonetheless, mainly because theanalysis of all existing literature— except [Bao15, Bao16], [OW18] as far as weare aware—is based on the CI analytical framework, the present paper is writtenconforming to the CI framework. We refer readers to Appendix B for more detaileddiscussion on this. We hope to elaborate this point of view elsewhere.
Acknowledgments. We thank the unknown referee of the paper [OT20] forpointing out the difficulty of applying the maximum principle for Liouville sec-tors. This prompted the author to search for the present notion of sectorial almostcomplex structures. We thank Hiro Tanaka for his collaboration on the study ofLiouville geometry and for making numerous useful comments on the early draftsof the present paper. The author is supported by the IBS-project IBS-R003-D1.
Notations and terminologies:
(1) α: eccentricity of a splitting data Nbhd(∂M) ∼= F × CkRe,(2) ϕ, ϕk: a convex (corner) smoothing function,(3) sk,ϕ: smoothing function of a sectorial corner Cα of codimension k,(4) sk+1,ϕ: a smoothing function of the ceiling of a sectorial corner Cα, which
we call an end profile function at a corner,(5) sϕ: end-profile function of Nbhd(∂∞M ∪ ∂M),(6) sϕ,κ: wiggled end-profile function of Nbhd(∂∞M ∪ ∂M),
(7) ε0: the size of a Z-invariant neighborhood NbhdZ(∂M) of ∂M in (2.7),which is fixed once and for all,
(8) Cδ: a sectorial corner,(9) ∂∞M ∩ ∂M : the ceiling corner,
(10) Cδ ∩ ∂∞M : the ceiling of sectorial corner Cδ.(11) λ-sectorial almost complex structures: the main class of our interest in the
present paper,(12) Sectorial almost complex structures: the main class of interest in [Oh21].
2. Recollections and preliminaries
2.1. List of conventions. In the present paper, we follow the conventions of thebook [Oh15] as summarized in [Oh15, p.xxi] except that there is no mention onsymplectization there.
Convention 2.1. (1) Definition of Hamiltonian vector field: XHcω = dH,(2) The standard symplectic form on the cotangent bundle
ω0 = −dθ, θ = pdq,
and hence the Liouville form λ = −θ and Liouville vector field is the Eulervector field ~E = p ∂
∂p .
(3) Symplectization: For given contact-type hypersurface S0 ⊂ M , we haveidentification
Nbhd(∂∞M) = S0 × [0,∞).
The convention of [GPS20] is the one which we call Entov-Polterovich’s conven-tion in [Oh15]. Here are the corresponding list of [GPS20]:
(a) Definition of Hamiltonian vector field: XHcω = −dH

12 YONG-GEUN OH
(b) The standard symplectic form on the cotangent bundle: ω0 = dθ, and hencethe Liouville form λ = θ and Liouville vector field is the Euler vector field~E = p ∂
∂p : The two negatives cancel each other.
(c) Symplectization: For given contact-type hypersurface S0 ⊂ M , [GPS20]has identification
Nbhd(∂∞M) = [0,∞)× S0.
(See [GPS20, p.9].)
In the discussion of convexity of ∂∞M ∩ ∂M , these differences of the definitionscancel the differences when the meaning of the outward pointing direction of XI
along ∂X is determined. In particular the outward pointing direction is that of
− ∂
∂R
in both conventions. This gives rise to the identification
Nbhd(∂M) ∼= ∂M × [0,∞) ∼= F × CRe≥0∼= F × T ∗R≥0
in both cases. (See [Oh21, Section 2.2] for detailed discussion on this orientationissue.)
2.2. Splitting data for boundaries.
Notation 2.2. Given 0 < α ≤ 1, we write
λαC := (1− α)xdy − αydx. (2.1)
We also write ωC = dx ∧ dy and JC for the standard symplectic and complexstructures on C (with complex coordinate z = x+ iy).
We recall that, by definition, a Liouville sector allows us to split a neighborhoodof ∂M as a direct product. We refer to [GPS20] for the notion of an α-definingfunction, and begin with the case when M only has boundaries (and no corners):
Proposition 2.3 (Proposition 2.25 [GPS20]). Let M be a Liouville sector and
fix a real number 0 < α ≤ 1. Every α-defining function I : NbhdZ(∂M) → Rextends to a diffeomorphism (valid over a cylindrical neighborhood of the respective
boundaries) NbhdZ(∂M) ∼= F × CRe≥0 in which I = y ◦ πC is the imaginary partof the CRe≥0-projection and F is a Liouville manifold.
This diffeomorphism also gives an identification
(NbhdZ(∂M), λM |NbhdZ(∂M))∼= (F × CRe≥0, π
∗FλF + π∗Cλ
αC + df) (2.2)
where λF is the Liouville form on F , and f : F ×CRe≥0 → R satisfies the followingproperties:
(f1) f is supported inside F0 × C for some compact Liouville domain F0 ⊂ F .(f2) f is independent of the CRe≥0-coordinate for |I| sufficiently large.
Notation 2.4 (R). In the course of the proof of Proposition 2.3, [GPS20] defines
another function R : NbhdZ(∂M)→ R. It satisfies
R|∂X = 0, ZR = (1− α)R, ω(XR, XI) = 1. (2.3)
Since the choice of the pair (F, (R, I)), and the constant α, will appear frequently,we give them names.

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 13
Definition 2.5 (Splitting data and eccentricity). Let (M,λ) be a Liouville sec-tor. We call a pair (F, (R, I)) a splitting data of (M,λ), and the associated α theeccentricity of the splitting.
Notation 2.6. As already insinuated in Proposition 2.3, we denote the projectionsby
πF : NbhdZ(∂M)→ F, πC : NbhdZ(∂M)→ C.
Remark 2.7. The map πC can be written as
πC = R+ iI : NbhdZ(∂M)→ CRe≥0
with F = (R, I)−1(0, 0)
Notation 2.8. We let ZαC be the Liouville vector field of λαC on C, so that
ZαC = (1− α)x∂
∂x+ αy
∂
∂y.
Then, near ∂M , we have the decomposition
Z = ZF ⊕ ZαC −Xf (2.4)
where ZF is the Liouville vector field on F .
Notation 2.9. We note that λαC ◦JC is an exact one-form. A choice of primitive is
hαC(x, y) =1
2
((1− α)x2 + αy2
). (2.5)
Remark 2.10. The eccentricity of the splitting data measures how much the levelset of {hαC = 2}—which is an ellipse for 0 < α < 1—deviates from the circle. Theassociate level set degenerates to the y-axis as α → 0 while it degenerates to thex-axis as α→ 1 and it becomes a circle when α = 1
2 . Indeed the precise geometriceccentricity of the relevant ellipse is given by√
1−(
1− αα
)2resp.,
√1−
(α
1− α
)2
when α > 12 (resp., α < 1
2 ).
Notation 2.11 (λC (without the α)). We will often denote λC := λαC and likewisefor hC, dropping the superscript α when explicit mention of it is unnecessary.
2.3. Splitting data for corners. The above can be generalized to the case ofwith corners.
Lemma 2.12 (Lemma 9.7 & Lemma 9.8 [GPS18]). Let H1, . . . ,Hn ⊂ M be asectorial collection of hypersurfaces ([GPS18, Definition 9.2]), equipped with choices
of Ii : NbhdZHi → R. Then the following hold:
(1) There exists unique functions Ri : NbhdZHi → R satisfying Z[Ri] = 0 nearinfinity, Hi = {Ri = 0}, {Ri, Ij} = δij and {Ri, Rj} = 0.
(2) The map
πT∗Rk := ((Ri1 , Ii1), . . . , (Rik , Iik)) : NbhdZ(Hi1 ∩ · · · ∩Hik)→ T ∗Rk
is a symplectic fibration whose symplectic connection is flat, thus giving asymplectic product decomposition
M ⊃ NbhdZ(Hi1 ∩ · · · ∩Hik) ∼= F × T ∗Rk

14 YONG-GEUN OH
identifying Z-invariant neighborhoods of NbhdZ(Hi1 ∩ · · · ∩Hik) and F ×T ∗0 Rk.
Definition 2.13. Following [GPS18], if M is a Liouville manifold-with-cornerswhose boundary forms a sectorial collection when viewed as a collection of hyper-surfaces, we say M is a Liouville sector with corners.
Definition 2.14 (Splitting data for corners). Let (M,λ) be a Liouville sector withcorners consider a corner of ∂M with codimension k−1 with k ≥ 1. Let Hi1 , . . . ,Hik
be the associated faces of the corner. We call the collection of data (F, {(Rij , Iij )})as in Lemma 2.12 a splitting data of the corner.
Remark 2.15. The Liouville isomorphism type of F of course depends on theconnected component of the corner stratum, but we suppress this from the notation.
2.4. Neighborhoods of ∂∞M and of ∂M . For given Liouville manifold (M,λ),there is a canonical projection
Nbhd(∂∞M)→ ∂∞M
of sending a point to the Liouville ray issued at the point. This map also induces acanonical contact structure on ∂∞M , but not the contact form which is defined onlyup to contactomorphisms. (See [Gir17] e.g., or Appendix B for a brief discussion.)
Choice 2.16 (s, S0). We choose a contact-type hypersurface S0
ι⊂ M and its
associated symplectization radial function
s : Nbhd(∂∞M)→ R≥0 (2.6)
such that S0 = s−1(0) defined on a neighborhood Nbhd(∂∞M) and satisfyingZ[s] = 1. A choice of S0 defines a Liouville embedding of
(S0 × [0,∞), d(esι∗λ))→ (M,dλ)
via the Liouville flow of Z, if we start with the contact-type hypersurface S0 suffi-ciently at infinity. In terms of (2.6), any real number t ≥ 0 exhibits a contactomo-prhism ∂∞M ∼= s−1(t).
Remark 2.17. By convexity of ∂∞M ∩ ∂M in ∂∞M and since Z is tangent to∂M outside a compact set of M , we have an embedding
(S0 × [0,∞), ∂(S0 × [0,∞)))→ (M,∂M).
This induces an identification
∂M ∩ {s ≥ 0} ∼= F × [0,∞),
where F = S0 ∩ ∂M . Note that Liouville flow also naturally induces a diffeomor-phism
F ∼= ∂M ∩ ∂∞Mby restricting the canonical projection Nbhd(∂∞M)→ ∂∞M to S0 ⊂ Nbhd(∂∞M).
Notation 2.18. Unless otherwise said, we denote by
Nbhd(∂∞M) = Nbhds≥0(∂∞M)
the image of the above mentioned embedding. We may assume that s is definedon a slightly bigger region than Nbhd(∂∞M), meaning that we may from time totime extend the function s from the ray [0,∞) to [−δ,∞).

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 15
Mostly we will work with the Liouville sectors without corner for the actualconstructions of the seeked almost complex structures and indicate how to extendto the case of with corners.
Notation 2.19. Let M be a Liouville sector (without corners). We fix a decom-position
M = (M \ F × C0≤Re<ε0)⋃
(F × C0≤Re<2ε0) (2.7)
for some ε0 which will be fixed once and for all.

16 YONG-GEUN OH
Part 1. Geometry of Liouville sectors
In this part, our goal is to unravel various geometry of Liouville sectors whichwill enter our construction of relevant almost complex structures.
The first thereof is to construct a family of exhaustion functions which smoothenthe corners ∂M ∩ ∂∞M . For this purpose, we use two stage-construction (SeeSection 5 for more detailed explanation.):
• We utilize a universal family of corner-smoothing functions of the stan-dard corner structure of Rk+ which is compatible for different k’s which isconstructed in [FOOO20, Section 18.5]. However we need to augment theconvexity property to this family for our purpose of constructing almostcomplex structures that are amenable to the maximum principle.• We then utilize another natural geometric construction of symplectic Rk-
action induced by the definition of sectorial collection from [GPS18] asexposed in [Oh21]
This will provide us with a canonical family of corner-smoothing function of Liou-ville sectors with corners.
The second ingredient is the study of conformally Liouveille deformation λt ofLiouville forms λ which changes them at infinity. Such a deformation will be neededto ensure that the strong maximum principle is applicable to J-holomorphic curveswith Z-invariant-at-infinity Lagrangian boundary condition for λ-sectorial almostcomplex structures, whose construction is of our main interest in the present paper.
We start with the first step of constructing the family of convex functions ϕ = ϕkon Rk+ for varying k’s.
3. Convex corner-smoothing functions of Rk+We first construct a suitable collection of convex functions ϕ : (0,∞)n → R
which accomplish this goal on the standard Euclidean corner [0,∞]n. That is, wewill find ϕ so that ϕ−1(N) is a smoothing of the Euclidean corner for large enoughN , and so that ϕ−1(N) is suitably convex. We will also construct ϕ exhibitingvarious symmetries; this will allow us to turn these local models of smoothings toglobal smoothings of sectorial corners.
These functions—which we label by ϕ, and by ϕk when we want to make thecodimension k explicit—are part of the data needed to define the functions sϕ fromthe introduction.
3.1. Octants.
Notation 3.1 (Symmetric hyperplanes). Consider the hyperplane
Rny := {(x0, . . . , xn) ∈ Rn+1 | x0 + . . .+ xn = 0}. (3.1)
We denote an element of this hypersurface by y. The permutation group Sn+1 onn+ 1 letters acts on Rny by permuting the coordinate variables (y0, · · · , yn).
Notation 3.2 (Octants). We denote the positive octant by
Qn+1+ := [0,∞)n+1 ⊂ Rn+1.
Noting that Rny ⊂ Rn+1 is preserved by the Sn+1-action, it also carries theinduced action thereof. We define an Sn+1-action so that the action on the factor

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 17
Rny is the induced one and on the R-factor is the trivial one on the product Rny×R.We now define an explicit Sn+1-equivariant orthogonal linear isomorphism
Π : Rn+1 → Rny × R ∼= Rn+1 (3.2)
to Π = (π~1; t) which is given by
y = π~1(x) (3.3)
t =x0 + · · ·+ xn√
n(3.4)
where the mapπ~1 : Rn+1 → Rny
is the orthogonal projection along the vector ~1. The map π~1 restricts to a homeo-morphism
π~1|∂Qn+1+
: ∂Qn+1+ → Rny; ~1 = (1, · · · , 1).
Let y = (y1, . . . , yn) be the standard coordinates of Rny ∼= Rn and t one on R. Thenwe can write
Π−1(y1, . . . , yn; t) = (x0(y), . . . , xn(y)) + t~1 = (x0(y) + t, . . . , xn(y) + t).
The map Π restricts to an Sn+1-equivariant homeomorphism
Φ : Qn+1+ → Rny × [0,∞) (3.5)
given by Φ(x) := (y(x); t(x)) where y(x) = π~1(x) and t(x) ≥ 0 is the constantdetermined by
x− π~1(x) = t(x)~1.
This map Φ is smooth away from the corners.
Remark 3.3. We refer readers to [FOOO20, Section 18.5] for some systematicdiscussion on the corner smoothing of [0,∞)n relevant to the smoothing process weapply below. One thing that was not addressed in [FOOO20, Section 18.5] is theconvexity property of the smoothing which is needed for our present work.
3.2. Symmetric convex corner smoothing of [0,∞)2. For the sake of exposi-tion, we begin with the two-dimensional case for which we write every map men-tioned above explicit. For this purpose, we will go back and forth between twocoordinate systems (x0, x1) in the description of the gluing process because thecoordinate system (y; t) is more convenient for the visualization and the coordinatesystem (x0, x1) is convenient for calculations.
First, we descirbe the coordinate system (y; t) explicitly. By considering theorthonormal basis change of R2 from the standard one to {ey, et} given by
ey =1√2
(∂
∂x1− ∂
∂x2
),
et =1√2
(∂
∂x1+
∂
∂x2
). (3.6)
We equip R2 = Ry × R with the coordinates (y, t) associated to this basis. Wedenote it non-symmetrically as (y; t) to emphasize y as the principle coordinate ofour interest.
In terms of the coordinates of (x0, x1) of R2 and (y; t) of Ry × R the map
Π : R2 → Ry × R

18 YONG-GEUN OH
is just given by the corresponding coordinate change map
y = π~1(x0, x1) =1√2
(x1 − x2),
t =1√2
(x1 + x2). (3.7)
Its inverse is given by
Π−1(y, t) =
(t+ y√
2,t− y√
2
)= (x0(y; t), x1(y; t)).
Next we consider a one-parameter family of hyperbolas
Sε ={
(x0, x1) ∈ Q2+
∣∣x0x1 =ε
2
}⊂ R2, ε > 0 (3.8)
as a smoothing of the corner of ∂Q2+. This is a family of curves that has the
following properties:
(i) they are convex in the direction towards −∞ · (1, 1),(ii) they are asymptotic to ∂Q2
+ as ε→ 0, and(iii) they are symmetric under reflection about the line x0 = x1 (i.e., about the
t-axis).
This motivates us to contemplate the orthogonal projection along the vector (1, 1)
π(1,1) : R2 → R1y.
onto the line orthogonal to (1, 1). The restrictions
π(1,1)|Sε : Sε∼=−→ R1
y
∼=←− ∂Q2+ : π(1,1)|∂Q2
+
exhibit a homeomorphism between Sε and ∂Q2+ for all ε > 0: We regard
π(1,1) : R2 → Ry
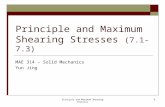
as a trivial fiber bundle over Ry with a fiber R. (See Figure 1.) Then we expressthe image of a section s of this vector bundle in terms of the fiber coordinate t
s(y) := t(x0(y), x1(y)).
Then in terms of the coordinate y of Ry, the following is obvious.
Lemma 3.4. Let sε : R1y → R2 be the the family of smooth sections whose image
is given by Sε for ε ∈ (0,∞), and let s0 be the piecewise linear limit s0 whose imageis given by ∂Q2
+. Then for ε > 0
0 < |s′ε(y)| < 1 (3.9)
for all y and s′0(y) = ±1 for ±y > 0 respectively.
Proof. Note that in (y, t) coordinates of R2, Sε is expressed as
t2 − y2 = 4ε. (3.10)
Therefore we have the formula
s0(y) = |y|, sε(y) =√y2 + 4ε.
Then straightforward calculation finishes the proof. �

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 19
Figure 1. Sections sε and s0
Remark 3.5. We have a natural decomposition of R1y into 2 rays
∆i := π(1,1)({x ∈ Q2+ | xi = 0}) = {(x0, x1) | x0 + x1 = 0, xi > 0}, i = 0, 1,
which are naturally identified with the rays
Q1i := ∂Q2
+ ∩ {xi = 0} ⊂ R2, i = 0, 1,
via the projection π(1,1). Denote by τ : R2 → R2 the reflection along the linex1 = x0 so that
τ(∆i) = ∆i+1 for i = 0, 1 mod 2.

20 YONG-GEUN OH
Note that Sε is preserved as a set under the action by τ and
inf
{r =
√x2
0 + x21
∣∣∣x ∈ Sε, √ε4≤ x0 ≤ 2
√ε
}=√ε.
We now define an S2-equivariant smooth gluing, denoted by
Sε,
by interpolating the curves
Sε ∩D2(2√ε))
and
∂Q21 \D2(2T0
√ε)
along the region D2(2T0√ε) \D2(
√2ε)).
We will do this expressing them as the graphs of functions in the (x0, x1)-coordinates as follows. Recall that the hyperbolas Sε are graphs of the function
fε(x0) =ε
2x0
for ε > 0. We set f0 to be the zero function. First for the region x0 ≥√ε/2, we
will smoothly interpolate them along the interval
2√ε < x0 < 2T0
√ε
for some choice of a small ε and a large T0 > 0, and then take the reflection thereofalong the line x1 = x0 to obtain the other half of the interpolated curve over theregion 0 ≤ x0 ≤
√ε/2 near ∂Q2
2.For this interpolating purpose, we take a function ρ : R+ → R such that ρ′(r) ≤
0, ρ′′(r) ≥ 0 and
ρ =
{1 if r ≤ 3
2T0√ε
0 if r ≥ 2T0√ε
We then define another family of sections sε : R1y → R by
fε(r) = ρ(r)fε(r) + (1− ρ(r)f0(r). (3.11)
By definition, we have
fε(x0) = 0
for x0 ≥ 2T0√ε. (See Figure 3.)
Choice 3.6 (ε, T0 and ε0). The precise choices of ε and T0 will be made later inSection 8 so that—in terms of ε0, another constant defined there—we will have
0 < ε0 � 2T0
√ε� 3
2ε0.
We will take a sufficiently small ε and a sufficiently large constant T0 > 1 relativeto ε.
We want the graphs of fε to be convex as follows.
Proposition 3.7. Let 0 < ε < 12 be given. Then there exists a sufficiently large
T0 > 0 depending only on ε and a cut-off function ρ = ρε,T0such that
• f ′′ε (x0) ≥ 0 for all x0, and
• f ′′ε (x0) > 0 for y with 2√ε < x0 < 2T0
√ε.

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 21
Proof. For the simplicity of notation, we write r = x0 in this proof.
By the symmetry, it is enough to consider r ≥√ε
4 . Recall that f0 = 0 and
fε(r) =ε
2r
and hence
fε(r) = ρ(r)ε
2r.
It follows from this that f ′′ε ≥ 0 either for r ≤ 2√ε or r ≥ 2T0
√ε. Therefore it
remains to ensure the convexity over the region
2√ε < r < 2T0
√ε.
For this purpose, we fix a cut-off function χ : R+ → [0, 1] given by
χε(t) =
{1 for t ≤ 2
√ε
0 for t ≥ 1 + 2√ε
χ′ε(t) ≤ 0. (3.12)
Lemma 3.8. Let 0 < ε < 12 be given as above. Then we can choose χ so that
χε(t)− tχ′ε(t) > 0 (3.13)
for all 2√ε < t < 1 + 2
√ε.
Proof. Let gε(t) := χε(t)− tχ′ε(t). Clearly, we have
gε(2√ε) = 1 > 0, gε(1 + 2
√ε) = 0.
We compute
g′ε(t) = −tχ′′ε (t).
By construction, we can make χε concave near t = 2√ε and convex near t = 1+2
√ε
and flat in between. (See Figure 2.) In particular we have
g′ε(t) < 0
near t = 1 + 2√ε. This implies that gε(t) > 0 near t = 1 + 2
√ε. Moreover we can
make χ′′ε supported in two intervals near t = 2√ε and t = 1+2
√ε respectively each
of which we can make as small as we want. In particular we can make
suppχ′′ε ⊂[2√ε, 2√ε+
1
8
]over the concave region on which we can achieve
gε(2√ε+ t) ≥ 1
2.
Since g′ε(t) ≤ 0 for t ≥ 2√ε+ 1
8 , this finishes the proof. �
For the convenience of calculations henceforth, we set
K = 2√ε(T0 − 1).
and consider the function defined by
ρK(r) := χ(
2√ε+
r
K
)(3.14)

22 YONG-GEUN OH
Figure 2. The graph of χε
by translating the domain of χ to the left by 2√ε followed by rescaling the variable
by the constant K > 0. Upshot of the latter translation is that ρK(0) = 1 and that
ρK(r) ≡ 0, for all r ≥ K.We have the relationship
t = 2√ε+
(r − 2√ε))
K(3.15)
for the variable t used above. We compute
ρ′K(r) =1
Kχ′(t), ρ′′K(r) =
(1
K
)2
χ′′(t). (3.16)

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 23
Now we note that the hyperbola fε satisfies
fε(r) = ε/2r, f ′ε(r) = −ε/2r2, f ′′ε (r) = ε/r3. (3.17)
Recall that we want hε to satisfy f ′′ε (r) > 0 for 2√ε < r < 2T0
√ε by choosing T0
sufficiently large for each given ε > 0. Utilizing (3.16) and (3.17), we compute
f ′′ε (r) = ρK(r)f ′′ε (r) + 2f ′ε(r)ρ′K(r) + ρ′′K(r)fε(r)
=ε
r3χ(t)− ε
r2
1
Kχ′(t) +
(1
K
)2
χ′′(t)ε
2r
=ε
r3
(χ(t)− r
Kχ′(t)
)+
(1
K
)2
χ′′(t)ε
2r
=ε
r3
(χ(t)− tχ′(t)− 2
(1− 1
K
)√εχ′(t)
)+
(1
K
)2
χ′′ (t)ε
2r
≥ ε
r3(χ(t)− tχ′(t)) +
(1
K
)2
χ′′ (t)ε
2r. (3.18)
Here the penultimate equality follows since
r
K= t− 2
√ε+
2√ε
K(3.19)
and the last inequality follows from
−χ′(t) ≤ 0.
Therefore it is enough to make (3.18) positive which is equivalent to the inequality
−χ′′(t) < 2K2
r2(χ(t)− tχ′(t))
hold on 2√ε < r < 2T0
√ε. Substituting (3.19) here, we see that the inequality
becomes
−χ′′(t) < 2 (χ(t)− tχ′(t))((t− 2
√ε) + 2
√ε/K))
2
for 2√ε < t < 1 + 2
√ε.
Recalling χ(t)− tχ′(t) > 0 by Lemma 3.8 and K = 2√ε(T0−1), we now examine
the quotient−((t− 2
√ε) + 1/(T0 − 1))2χ′′(t)
2(χ(t)− tχ′(t)).
for 2√ε ≤ t ≤ 1 + 2
√ε.
Lemma 3.9. Provided T0 is sufficiently large, we have
−((t− 2√ε) + 1/(T0 − 1))2χ′′(t)
2(χ(t)− tχ′(t)))< 1.
Proof. If χ′′(t) ≥ 0, the denominator becomes negative and the inequality triviallyholds. If χ′′(t) < 0, then t must be near 2
√ε. In that region, we have
t2χ′′(t) ∼ ε, χ(t)− tχ′(t)) ∼ 1.
Therefore we still have
−((t− 2√ε) + 1/(T0 − 1))2χ′′(t)
2(χ(t)− tχ′(t))< 1

24 YONG-GEUN OH
if we choose T0 >1
2√ε
+ 1, as we assume 0 < ε < 12 . �
Finally this completes the proof. �
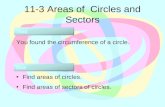
By construction, the curve
Sε (3.20)
is a convex curve which is invariant under the reflection along the t-axis and satisfy
Sε =
{Image sε for |y| ≤
√2ε}
Image s0 for |y| ≥ T0
√2ε}
(3.21)
respectively. (See Figure 3.)
3.3. Compatible corner smoothing of [0,∞)n. In this subsection, we providea family of local models of smoothing [0,∞)n that is compatible with various nand with the Sn-symmetry for the coordinate swapping. We will also make thesmoothing convex—this will be important to our study of pseudoconvexity later.(See Proposition 7.10.)
We borrow the construction from [FOOO20, Section 18.5]. The following isa slight variation of [FOOO20, Condition 18.21] arising by stripping away somestatements on the smooth structure on [0,∞)k, which is not needed here.
Condition 3.10 (Condition 18.21 [FOOO20]). For any k ∈ Z>0 we considerTransk−1 and Ψk with the following properties: (See [FOOO20, Figure 18.3] whichis duplicated below in 4.)
(1) Transk−1 is a smooth (k − 1)-dimensional submanifold of [0,∞)k and iscontained in (0,∞)k \ (1,∞)k.
(2) Transk−1 is invariant under the Perm(k) action on [0,∞)k.(3) Transk−1 ∩ ([0,∞)k−1× [1,∞)) = Transk−2× [1,∞). This is an equality as
subsets of [0,∞)k = [0,∞)k−1 × [0,∞).(4)
Ψk : [0, 1]× Transk−1 → [0,∞)k
is a homeomorphism onto its image. Let Uk be its image.(5) The subset Uk ⊂ [0,∞)k is a smooth k-dimensional submanifold with
boundary and Ψk is a homeomorphism. Moreover
∂Uk = ∂([0,∞)k) ∪ Transk−1
and the restriction of Ψk to {0} × Transk−1 is a homeomorphism onto∂([0,∞)k). The restriction of Ψk to {1} × Transk−1 is the identity map.
(6) Ψk is equivariant under the Perm(k) action. (The Perm(k) action onTransk−1 is defined in Item (2) and the action on [0,∞)k is by permu-tation of factors.)
(7) If s ≥ 1, t ∈ [0, 1] and (x1, . . . , xk−1) ∈ Transk−2, then
Ψk(t, (x1, . . . , xk−1, s)) = (Ψk−1(t, (x1, . . . , xk−1)), s).
Here we use the identification in Item (3) to define the left hand side.
Remark 3.11. In fact, the homeomorphism Ψk is a diffeomorphism with respect tosome smooth structure on [0,∞)k, denoted by smk in [FOOO20, Condition 18.21].We refer interested readers [FOOO20, Section 18] for a detailed discussion.

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 25
Figure 3. Level sets of ϕ2,ε
The following is a slight refinement of [FOOO20, Lemma 18.22] by the additionof the convexity statement. We will make our exposition as close to that of theproof of [FOOO20, Lemma 18.22] as possible.
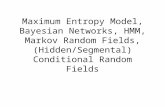
Lemma 3.12. For any k ∈ Z+ there exist Transk−1 and Ψk satisfying Condition3.10. Moreover, for each given δ > 0, we may take them so that Uk contains[0,∞)k \ [1− δ,∞)k.
Proof. The proof is by induction. If k = 1, we define Trans0 and Ψ1 : [0, 1]× {1−δ/2} → [0,∞) by
Trans0 = {1− δ/2}, Ψ1(t, 1− δ/2) = t.

26 YONG-GEUN OH
0 1
1
Trans1
U2
Figure 4. Transk−1 and Uk [FOOO20, Figure 18.3]
in which case there is nothing to prove. When k = 2, we define Trans1 and
Ψ2 : [0, 1]× Trans1 → [0,∞)2
as follows. Conditions 3.10 (2) (3) determine Trans1 outside [0, 1]2. Conditions3.10 (6) (7) determine Ψ2 outside [0, 1]2. We now extend Trans1 by interpolatingthe two lines
{(x0, x1) | x0 = 1, x1 ≥ 1− δ}, {(x0, x1) | x1 = 1, x0 ≥ 1− δ}
with δ = 2T0√ε by a convex smooth curve as in the figure. (See [FOOO20, Figure
18.3].) Indeed, we can take
Trans1 := Sε +1√2
(1, 1)
for the Sε defined in (3.20). Now recall the function from (3.11). We extend Ψ2 to
[0, 1]2 by considering the family of translations Sε
Sε +t√2
(1, 1)
for t ≥ 0: In the (y; t)-coordinates, it is given by
Ψε2(y; t) = yey + sε ◦ π(1,1) ◦ s0(y)et + tet
= yey + tet + s0 ◦ π(1,1) ◦ sε(y)et
for t ≥ − 12 . (See Figure 3.) Then we set
Ψ2(x1, x2) = Ψ2(x1, x2) = Ψε2
(x2 − x1√
2;x1 + x2√
2
)= (x1, x2) + sε ◦ π(1,1) ◦ s0(y)et.
(We note that the second summand goes to zero as ε→ 0 and hence Ψε2 converges
to the identity map as ε→ 0.) This completes the construction for k = 2.Now for higher k ≥ 3, suppose we have Transk′−1, Ψk′ for k′ < k as the induction
hypothesis. Conditions 3.10 (2) (3) determine Transk−1 outside [0, 1]k. Conditions3.10 (6) (7) determine Ψk outside [0, 1]k. It is easy to see that we can extend themto [0, 1]k and obtain Transk−1, Ψk. �

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 27
Remark 3.13. Under the above construction, the map Ψk depends on the choice ofsome parameters such as ε, T0 and ρ which entered in the definition of sε when k =2. We will denote Ψk by Ψε
k when we need to highlight this parameter dependenceof the definition of Ψk.
Then we define a one parameter family of hypersurfaces
Stε:k := Transn − (t+ 1/2)(1, 1, . . . , 1), t ≥ 0. (3.22)
We note that S0ε:k = Sε from (3.20) by construction, with the dimension k specified.
Finally—recalling the change of coordinates in (3.5)—we consider the changeof coordinates Φ−1(= Π :)(x0, · · · , xk) 7→ (y; t) and define a function ϕεk = sε ◦Φ−1|x0=0. which has the expression
ϕεk(x1, · · · , xk) = t ◦ Ψεk(x1, . . . xk) (3.23)
We consider the function on
Qkε := {(x1, . . . , xk) | ϕεk(x1, · · · , xk) ≥ 0},
which is the corner-smoothing of Qk+. (See Figure 4.) By construction, (3.9) implies
0 ≤ ∂ϕεk∂xi
≤ 1 (3.24)
for all i = 1, . . . , k.
Remark 3.14. By construction, we have
ϕεk(x1, . . . , 0, . . . , xk) =
{ϕεk−1(x1, . . . , xi, . . . xk) for mini |xi| ≥ 2
√ε, xi = 0
x1 · · ·xk − ε2 for maxi |xi| ≤
√ε
4
(3.25)on Qk
ε . In particular, when k = 2, we have the following explicit expression
ϕε2(x1, x2) =
x1 for x2 ≥ 2T0
√ε, x1 ≤
√ε
4
x2 for x1 ≥ 2T0√ε, x2 ≤
√ε
4
x1x2 − ε2 for
√ε
4 < x1, x2 ≤ 2√ε
(3.26)
and on the level set (ϕε2)−1(0), we have
x1x2 =ε
2
when√ε
4 < x1, x2 ≤ 2√ε.
We will use the following property of ϕ2 later which enters in the proof of Lemma8.15.
Lemma 3.15. Let ε > 0 be sufficiently small and then choose T0 so that
5ε04≤ 2T0
√ε ≤ 3ε0
2. (3.27)
Then we can choose the function ϕ := ϕε2 such that it satisfies (3.26) and
x2∂ϕ
∂x2(x1, x2) ≥ x1
∂ϕ
∂x1(x1, x2) (3.28)
on the region
Bε,ε0 :=
{(x1, x2)
∣∣∣ 0 < x2 ≤ 2√ε,
√ε
4≤ x1 ≤
ε02
}. (3.29)

28 YONG-GEUN OH
Proof. We will check the inequality on each level set
ϕ(x1, x2) = c
of the box Bε,ε0 for 0 ≤ c ≤ 2√ε. On each levet set, we have the slope of the
tangent line of the curve at (x1, x2) is given by
dx2
dx1
∣∣∣(x1,x2)
= − ∂ϕ
∂x1(x1, x2)
/ ∂ϕ
∂x2(x1, x2). (3.30)
We start with the level c = 0. Let x2 ≤ 2√ε. Then we have
x1 ≥√ε
4.
We divide our consideration into 3 regions of x1,√ε
4< x1 ≤ 2
√ε, x1 ≥ 2T0
√ε, 2
√ε ≤ x1 ≤ 2T0
√ε.
If√ε
4 < x1 ≤ 2√ε, we have
x2∂ϕ
∂x2(x1, x2) = x1
∂ϕ
∂x1(x1, x2)
from the third line of (3.26). If x1 ≥ 2T0√ε, we have
x2∂ϕ
∂x2(x1, x2) = x2, x1
∂ϕ
∂x1(x1, x2) = 0.
Finally we consider the region 2√ε ≤ x1 ≤ 2T0
√ε. Using the slope formula (3.30),
we estimate the quotient
x2∂ϕ
∂x2
/x1
∂ϕ
∂x1.
Staring at Figure 3, we see that the linear approximation of the level set ϕ = 0 isgiven by the graph x2 = ζ0(x1) of the function defined by
ζ0(x1) :=1
4√
2(T0 − 1)(2T0
√ε− x1) (3.31)
for 2√ε ≤ x1 ≤ 2T0
√ε which passes through two end points
(2√ε,√ε/4), (2T0
√ε, 0).
Therefore we have
x2∂ϕ
∂x2
/x1
∂ϕ
∂x1∼ 2T0
√ε− x1
4√
2(T0 − 1)x1
× 4√
2(T0 − 1)
=2T0√ε− x1
x1=
2T0√ε
x1− 1.
We have2T0√ε
x1− 1 > 1
provided x1 <2T0√ε
2 = T0√ε. Therefore we can make the level sets of ϕ sufficiently
approximate the level sets of the function x2 − ζ0(x1) so that
x2∂ϕ
∂x2
/x1
∂ϕ
∂x1≥ 1

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 29
on a slightly smaller interval√ε
4≤ x1 ≤ T0
√ε− ε0
8.
This interval includes [√ε/4, ε0/2], which in particular contains the box region Bε,ε0
in (3.29), because we have
T0
√ε− ε0
8≥ ε0
2(3.32)
by the requirement (3.27). This proves the inequality (3.28) on the zero-level setof ϕ on [
√ε/4, ε0/2].
For the positive level c > 0, the level set ϕ = c is given by translating it by thedirection c · (1, 1). We consider the level set over the region
√c ≤ x2 ≤ 2
√ε+√c
and√ε
4 +√c ≤ x1. By the same reason as for c = 0, we have
x1∂ϕ
∂x1= x2
∂ϕ
∂x2
for√ε
4 +√c ≤ x1 ≤ 2T0
√ε+√c and x1
∂ϕ∂x1
= 0 if x1 ≥ 2T0√ε+√c. Therefore we
have only to examine the inequality on the region
2√ε+√c ≤ x1 ≤ 2T0
√ε+√c.
This time the associate linear approximation of the relevant levet set is given bythe graph of the function
ζc(x1) =2T0√ε+√c− x1
4√
2(T0 − 1)+√c.
Then we obtainx2
x1
1dx2
dx1
=2T0√ε+√c(4√
2(T0 − 1))
x1− 1.
Therefore we havex2
x1
1dx2
dx1
> 1
if √ε
4+√c ≤ x1 < T0
√ε+√c(2√
2(T0 − 1)).
Since T0√ε+√c(2√
2(T0−1)) ≥ T0√ε for all c ≥ 0, we have finished the proof. �
Once we have constructed this compatible smoothing, we have the followingproposition whose proof is omitted which is intuitively obvious because sε is asmooth approximation of sε as ε → 0. And the functions are obviously Sk-symmetric.
Proposition 3.16. For any sufficiently large T0, there exists some ε > 0 and ϕε
that satisfies the following for all 0 <√ε ≤ ε0:
(1) The restriction ϕε|RJ are S|J|-equivariant for any subsets J ⊂ n = {1, . . . , n}.Here RJ ⊂ Rn is the obvious copy of R|J| where we put Sk = Perm(k).
(2) The Hessian Hess(ϕε) of ϕε is positive semi-definite.(3) Hess(ϕε) = 0 for xi ≥ 2T0
√ε for some i = 1, · · · , k.

30 YONG-GEUN OH
We denote by ϕk or ϕεk the function corresponding to the corner of codimension1 ≤ k ≤ n. More generally we introduce the set of such a symmetric convexfunctions ϕ.
Definition 3.17. A symmetric convex smoothing function on Rk is a functionϕ : Rk → R satisfying the following:
(CV1) The restriction ϕ|RJ is S|J|-invariant for all subsets J ⊂ n = {1, . . . , n}.Here RJ ⊂ Rn is the obvious copy of R|J|.
(CV2) Hess(ϕ) is positive semi-definite everywhere.(CV3) Hess(ϕ|RJ ) is compactly supported on RJ for all subsets J ⊂ n for |J | ≥ 1.
We denote the set thereof by ConvSksm(Rk). We also consider the set of nonsymmetricconvex smoothing function consisting of those not necessarily satisfying (CV1),which we denote by Convsm(Rk)
Proposition 3.16 shows that both sets are nonempty, which are also convex andso contractible.
For given ϕ, we define
Uϕ;i = {(x1, . . . , xk) | ϕ(x1, . . . , xk) = xi} (3.33)
for each i = 1, . . . , k. (We alert readers that Uϕ;i is a codimension zero subset of Rkby the property of the function ϕ that satisfies ϕ = xi near the coordinate planesof xj with j 6= i and xi is away from 0.) For each i, we consider the rectangularpidsdefined by
Cϕ;ε,δ := {(x1, . . . , xk ∈ Rk+ | xi ≥ δ, 0 ≤ xj ≤ ε∀j 6= i} (3.34)
for each pair ε, δ > 0 of positive constants. It follows from Definition 3.17 (CV3)that we can choose 0 < ε < δ so that Cϕ,i;ε,δ is contained in Uϕ;i. (See Figure 3.)
The collection thereof, which we denote by Ci(ϕ), is a partially ordered set byinclusion. The following is obvious by the defining conditions on ϕ.
Lemma 3.18. The maximal element of any nonempty chain D of POSET Ci(ϕ)is also a rectangularpid Cϕ;ε′,δ′ for some 0 < ε′ ≤ δ′ <∞.
Definition 3.19 (Width and Height of ϕ). Let ϕ ∈ ConvSksm(Rk).
(1) For given i and a chain Di of Ci(ϕ), we define the i-th height, denoted byht(ϕ, i;Di), to be the δ′, and the i-th width, denoted by wd(ϕ, i;Di), to bethe ε′ appearing in the above lemma. Denote by D the symmetric collectionconsisting of Di for i = 1, . . . , k.
(2) Choose the symmetric collection D above so that Di’s are pairwise disjointfor i = 1, . . . , k. We define a height of ϕ, denoted by ht(ϕ;D), to be
ht(ϕ;D) := ht(ϕ, i;Di)
for a (and so any) choice i = 1, . . . , k. We define the width wd(ϕ;D) by thesame way.
Thanks to the symmetry of ϕ, ht(ϕ;D) is well-defined independent of i’s. Sincewe will just need one choice of such a collection D for our purpose, we will omitthe dependence on D from the notations of
ht(ϕ;D) =: ht(ϕ), wd(ϕ;D) =: wd(ϕ).

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 31
By definition, we have
ϕ(x1, . . . , xk) = xi when xi ≥ ht(ϕ), and 0 ≤ xj ≤ wd(ϕ) for j 6= i (3.35)
for any given ϕ. The following is also obvious from definition.
Corollary 3.20. (1) For any compact collection of D ⊂ ConvSksm(Rk+),
0 < infϕ∈D
wd(ϕ) < supϕ∈D
ht(ϕ) <∞.
(2) By letting wd(ϕ) as small as we want, we can make ht(ϕ)/wd(ϕ) as largeas we want.
(3) dϕ(x1, . . . , xk) = 0 if and only if (x1, . . . , xk) = 0.
Example 3.21 (Width and height of the model). By definition, we have
wd(ϕεk+1) =
√ε
4, ht(ϕεk+1) = 2T0
√ε, ht(ϕ)/wd(ϕ) = 8T0
for those ϕ = ϕεk+1 explicitly constructed in Proposition 3.16.
Remark 3.22. Even when ϕ is not symmetric, we can define the width and theheight wd(ϕ) and ht(ϕ) as follows. Lemma 3.18 still enables us to define wd(ϕ; i,Di)(resp. ht(ϕ; i,Di)). Then consider a (nonsymmetric) collection D = {Di} whichare still mutually disjoint. Then we define
wd(ϕ;D) := mini=1,...,k
wd(ϕ; i,Di)
ht(ϕ;D) := maxi=1,...,k
ht(ϕ; i,Di).
Again we only need one such choice D, we will omit D from their notations.
4. End-profile functions sϕ of Liouville sectors
4.1. Smoothing of the ceiling corner of Liouville sector. LetM be a Liouvillesector without corners. We fix a smoothing profile (Condition 4.5), so that we inparticular have:
• a radial coordinate s as in (2.6) (giving rise to a contact-type hypersurfaceS0 ⊂M),• a convex smoothing function ϕ for ∂M , and• Splitting data (F, {(Ri, Ii}ki=1) for every sectorial corner Cδ of codimensionk.
We remark that M may carry more than one sectorial corners, and of varyingcodimensions, so we may need to handle smoothing of the ceilings of various secto-rial corners separately. We focus on one of the corners now and henceforth, unlessotherwise mentioned.
Proposition 4.1. Fix an eccentricity α with 0 < α ≤ 1. Let N0 = N0(α) > 0 be aconstant such that Z is tangent to ∂M ∩{|I| ≥ N0}. Consider the projection πT∗Cand πT∗F with respect to the splitting T ∗M ∼= T ∗C ⊕ T ∗F . Then we can choosethe contact-type hypersurface S0 so that the following hold:
(1)
S0 ∩Nbhd 3ε02
(∂M) = |I|−1([N0,∞)) ∩Nbhd 3ε02
(∂M).

32 YONG-GEUN OH
(2) We may choose s so that es = |I|1/α on
|I|−1[(N0,∞)) ∩Nbhd 3ε02
(∂M).
In particular
ds = ± dIαI
= ±π∗C(dy
αy
). (4.1)
(3) The Liouville one-form λ is projectible on |I|−1([N0,∞)) ∩ Nbhd 3ε02
(∂M)
under the projection πT∗C, and satisfies
πT∗C(λ) = λC = (1− α)xdy − αydx.
Proof. For the simplicity of exposition, we consider the region where I > 0. (Thesame consideration applies to the region where I < 0.)
To achieve the first statement, we have only to recall Z[I] = αI with α > 0 andhence
Z[s] = Z[(log I)/α] = 1.
In particular Z is transversal to the level sets I−1(c) of I for any c 6= 0. Thereforewe can choose a contact-type hypersurface S0 of the form
S0 := I−1(N0)
for a sufficiently large N0 so that the Liouville flow on M induces a Liouvillediffeomorphism
I−1([N0,∞)) ∼= S0 × [0,∞)
which induces the decomposition
M ∼= W ∪ S0 × [0,∞)
so that the associated radial coordinate s satisfies the equality. es = I1/α.For the second statement, we recall that when Z is tangent to ∂M , Xf satis-
fies dπC(Xf ) = 0 and hence is tangent to the foliation F. (See Proposition 2.3.)Therefore the flow of Xf preserves the splitting TM = TF ⊕ TC. Then using theformula
Z = ZF ⊕ ZC −Xf
given in (2.4), we derive
dπC(Z) = ZC|(x,y)=(R,I) = (1− α)R∂
∂x+ αI
∂
∂y(4.2)
when I is sufficiently large. (See Proposition 2.3.) This implies
λC(ξ) = dλC(ZC, ξ) = dλC(dπC(Z), ξ)
for all ξ ∈ TC and Y ∈ TF on S0, where for the first equality we use the definitionthat ZC is the Liouville vector field of the Liouville form λC.
On the other hand, we directly compute
πT∗C(λ)(ξ) = λ(0⊕ ξ) = dλ(Z, 0⊕ ξ)= d(π∗FλF + π∗CλC + df)(Z, 0⊕ ξ) = (π∗F dλF + π∗CdλC)(Z, 0⊕ ξ)= π∗C(dλC)(Z, 0⊕ ξ) = dλC(dπC(Z), ξ)
for all ξ ∈ TC. By comparing the two, we have proved that λ is projectible underthe projection πT∗C and its projection is given by πT∗C(λ) = λC on S0 × [0,∞) ∩Nbhd2ε0(∂M).
�

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 33
4.2. Smoothing profiles. Now we take ϕ ∈ ConvS2sm(R2
+) and consider the func-tion
s1+1,ϕ := − logϕ(R, e−s
)(4.3)
on the union
(Nbhd2ε0(∂M) \ ∂M) ∪Nbhds≥N (∂∞M).
Recall that
e−s =1
|I|1/αon 0 ≤ R ≤ 3ε0
2(4.4)
on s ≥ N for N > 0 sufficiently large by the choice we made in Proposition 4.1. Bythe properties of ϕ2,ε, we have
s1+1,ϕ =
{− logR(= µ) for e−s ≥ ht(ϕ), R ≤ wd(ϕ)
s for R ≥ ht(ϕ), e−s ≤ wd(ϕ)
We note that both R and s are defined on the interpolating region and hence thefunction s1+1,ϕ is smooth.
Note that the level sets of this function provide the asymptotic profile of thehorizon ∂∞M ∪ ∂M under the coordinate change R 7→ − logR := µ, which willplay a fundamental role in our definition of the sectorial almost complex structures.
Definition 4.2 (End-profile function s1+1,ϕ). Let a contact-type hypersurface S0
be given as above. For each sectorial corner Cα, We fix a splitting data (F, (R, I))
and a convex smoothing function ϕ ∈ ConvS2sm(R2
+) satisfying
ε0 ≤ ht(ϕ) <3
2ε0
so that their union defines a smoothing function by a partition of unity. We denotethis glued function by
sϕ
and call an end profile function of M .
We consider the function sϕ on a neighborhood ∂∞M ∪ ∂M ,
Nbhds≥N (∂∞M) ∪Nbhd2ε0(∂M) (4.5)
for varying N over N ≥ 0.
Lemma 4.3. Let ϕ = ϕ2,ε ∈ ConvS2sm(R2
+) with wd(φ)� ε0 be as given before, andconsider the end-profile function sϕ associated to ϕ. Then each level set (sϕ)−1(r)∩µ−1((−∞,K]) is a smooth compact hypersurface for each r > 0 andK ≥ − log(2ε0).
Proof. At each sectorial corner Cα, we compute the differential of its associatedend-profile function s1+1,ϕ. We have
πT∗C(ds) =1
αIdy
by (4.1). Therefore we compute and
πT∗C(ds1+1,ϕ) = −πT∗C(dϕ)
ϕ=
1
ϕ
(−∂ϕ∂x
dx+∂ϕ
∂yπT∗C(ds)
)=
1
ϕ
(−∂ϕ∂x
dx+∂ϕ
∂y
1
αIdy
)(4.6)

34 YONG-GEUN OH
with ∂ϕ∂x and ∂ϕ
∂y evaluated at (R, e−s). Since ∂ϕ∂y (R, e−s) 1
αI 6= 0 on the interested in
the region, this vector is also nowhere vanishing. In particular ds1+1,ϕ is nowhere
vanishing which proves smoothness of s−11+1,ϕ(r) by the regular value theorem. The
other compactness statement is obvious by definition. �
Figure 5. Foliation by an exhaustion function
Remark 4.4. (1) As mentioned in the introduction, the hypersurfaces s−1ϕ (r)
may not be of contact-type but a neighborhood
Nbhd(∂∞M ∪ ∂M)

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 35
is exhausted by them by construction for sufficiently large r’s, which willbe sufficient for our purpose. We suspect that using the non-contact typehypersurfaces may be inevitable to make the almost complex structureamenable to the application of maximum principle in both directions of∂∞M and ∂M of the Liouville sector M . (See Remark 1.7 (3).)
(2) It is more natural to regard the above exhausting foliation as the smoothingof the ceiling corner of the compact sectorial domain
W = M \ (S0 × [0,∞))
or the ideal completion M . (See Appendix B.) The coordinate changes 7→ e−s or s 7→ eN−s by translating the radial coordinates reflects thispoint of view, which is also related to the coordinate change
(R, I) 7→ (− logR, I) =: (µ, ν)
we will use in the next section. (See Figure 5.)
4.3. The case with corners. We can also apply the above definition of s1+1,ϕ tosk+1,ϕ for the case of Liouville sectors with corners which is now in order.
Recall from Definition 2.13 that ∂M is a union of a collection of cleanly inter-secting hypersurfaces H1, . . . ,Hk ⊂ M (cylindrical at infinity) near each sectorialcorner of ∂M of codimension k for some k. We now focus on a corner with thecodimension 1 < k < n with n = 1
2 dimM since remaining cases are easier. Recall
from Lemma 2.12 that {Ri, Ii}ki=1 form a canonical coordinates near the cornerover the subset
k⋂i=1
{Ii = 0} ∼= F × [0,∞)k
and Hi = {Ri = 0}ki=1. As before, we make the coordinate changes
µi = − logRi, νi = Ii
as in (8.3) and write µ = (µ1, . . . , µk) and ν = (ν1, . . . , νk). Then we consider theversion of barrier functions that incorporates the mixture of the ceiling corner andsectorial corners. By choosing a splitting data (F, {Ri, Ii}ki=1} with eccentricity0 < α < 1, we have a splitting
NbhdZ
k⋂j=1
Nbhdε(Hik))
∼= F × T ∗Rk+
of a neighborhood of the intersection⋂kj=1 Nbhdε(Hik)).
As before we fix a contact-type hypersurface S ⊂ M so that and a Liouvilleembedding S × [0,∞) ↪→ M and let s = sS0 be the associated radial function.Next, for each given ϕk ∈ Convsm(Rk) we consider the function
sk+1,ϕ = − logϕk+1
(R1, · · · , Rk, e−s
)(4.7)
in the same way as in Subsection 4.1.From now on, we will not further mention the possibility that there may be more
than one component of the sectorial corner, since there will be no essential dif-ferences in its exposition from the case of one sectorial corner except notationalcomplexity added.
The following premises will be put for the definitions of all the sectorial thingswe introduce in the rest of the paper.

36 YONG-GEUN OH
Condition 4.5 (Smoothing profile). • We fix a contact-type hypersurfaceS0 ⊂M and the associated decomposition
M = W ∪∂W (S0 × [0,∞)),
and the associated radial function s = sS0on S0 × [0,∞), where W is a
compact Liouville domain with boundary ∂W = S0.At each sectorial corner Cδ of Nbhd(∂∞M ∪ ∂M), we fix the following
data:• a splitting data (Fδ, {(Rδ,i, Iδ,i)}) with Fδ = (Rδ, Iδ)
−1(0, 0) with Rδ =(Rδ,1, . . . , Rδ,k) and similarly for Iδ.• convex smoothing function
ϕδ = ϕkδ+1 ∈ Convsm(Rkδ+1).
and its associated end-profile function
skδ+1,ϕ : Nbhd(Cδ)→ R.We glue the above end-profile functions of the corners by a partition of unity
and denote by
sϕ, ϕ := {ϕδ}the resulting function, which we call an end-profile function of the full boundary ofM , DM = ∂∞M ∪ ∂M .
We have a natural diffeomorphism between ∂∞M and the level set
s−1(N) =: ∂NM ∼= S0
for any N ≥ 0, which is induced by the Liouville flow.
Remark 4.6. It is shown in [Oh21] that a choice of section for the leaf spacefibration π : ∂M → N∂M canonically induces a splitting
Nbhd(∂M) = F × CRek≥0, ω = π∗FωF +
k∑i=1
dRi ∧ dIi
via a natural Rk-equivariant symplectic diffeomorphism.
5. Intrinsic geometry of end-profile functions and splitting data
In this section, we explain intrinsic geometry of end-profile functions and thesplitting data laid out in [Oh21] which provide some intrinsic meaning and per-spective with the constructions of sectorial Floer package we perform in Part IIwhich much uses coordinate calculations.
We start with the splitting data for the Liouville sectors with corners. In [Oh21],in the course of providing an intrinsic characterization of Liouville sectors withcorners, the present author considers clean coisotropic collection
{H1, · · · , Hk}of hypersurfaces, and the natural projections
πHi : Hi → NHi
to the space of leaves of the characteristic foliation of Hi. It is shown that at eachsectorial corner
Cδ = H1 ∩H2 ∩ · · · ∩Hk

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 37
associated to the collection {H1, · · · , Hk}, a choice of smooth sections
{σ1, · · · , σk}with σi : NHi → Hi of the fibration πHi : Hi → NHi , induces a free Rk-actionon Cδ which simultaneously linearizes the characteristic flows of Hi which leads tothe collections of functions {R1, · · · , Rk} as the action variables in the integrablesystems.
Then the Rk-action is canonically extended to a neighborhood Nbhd(Cδ) ⊂ Musing Gotay’s coisotropic embedding theorem [Got82] of presymplectic manifolds(Hi, ωHi) where ωHi = (dλ)|Hi . Its moment map
φG : Nbhd(Cδ)→ g∗ ∼= Rk
for the action of the group G = Rk is precisely the map
φG = (R1, · · · , Rk) : Nbhd(Cδ)→ Rk
where the functions Ri are the Hamiltonian of the vector field ei associated to thebasis element ei ∈ g, i.e.,
dRi = eicωfor i = 1, . . . , k, with the normalization Ri|Hi = 0 for each i. Then the conditionthat the Liouville vector field of M is outward pointing and the equation {Ri, Ij} =δij implies Ri ≥ 0 for all i on a neighborhood Nbhd(Cδ) and hence the codomain ofφG is indeed Rk+. This not only provides a canonical splitting data {(Ri, Ii)} in thedescription of neighborhood structure of ∂M given in [GPS18], but also provides acollaring, or a coordinate chart, of the corner.
Then the functions
sk+1,ϕ = ϕk+1(R1, · · · , Rk, e−s)comprising the end profile function sϕ, can be replaced by
sk+1,ϕ = ϕ2(sk,ϕ, e−s)
instead by breaking the symmetry from the direction of the ceiling ∂∞M but keep-ing those of sectorial corners. Here the function sk,ϕ can be written as
sk,ϕ = − logϕk ◦ φG.Here the function ϕk ◦ φG smoothly approximates the sectorial corner of
Nbhd(∂M) ∼= F × CkRe≥0
in coordinates (R1, · · · , Rk). Note that both of two functions in the compositionϕk ◦φG carry natural geometric meaning: ϕk is a canonically constructed universalconvex function which smoothly approximates the corner structure of Rk+, and φGis the moment map of the Rm symplectic action of Nbhd(∂M) which is intrinsicallydefined in the coordinate free way once the collection of sections
{σ1, . . . , σk}which substitutes the coordinate expression
(R1, · · · , Rn).
In this regard, the end-profile function sk+1,ϕ is intrinsic in that it depends onlyon the sectorial collection {H1, · · · , Hk} defining the sectorial corner Cδ, and achoice of these sections σ1, · · · , σk. Likewise, the (global) end-profile function sϕ isintrinsic in this sense.

38 YONG-GEUN OH
We would like to compare this with the λκ-wiggled end-profile function sϕ;κ
which will be introduced in the next section. The latter depends on an additionaldatum of conformally Liouville deformation of Liouville form λ associated to thecut-off function κ to be defined in the next section. This is the reason why wedifferentiate two types of end-profile functions sϕ and sϕ,κ for which we maintaindifferent notations and name differently.
6. Conformally Liouville deformation of Liouville forms
Recall that we would like J to satisfy
−ds ◦ J = λ on Nbhd(∂∞M) \Nbhd(∂∞M ∩ ∂M),
and
−dR ◦ J = π∗FλF + π∗CλC on Nbhd(∂M) \Nbhd(∂∞M ∩ ∂M)
and to interpolate the two by considering a deformation of Liouville one-forms ofthe type
λκ = λ− d((1− κ(R))f)
as mentioned in the introduction. Because λκ is changed from λ at infinity, itis not Liouville equivalent to λ which is not desirable for the study of originalLiouville manifold (M,λ). In this section, we will deform λκ back to λ by applyinga Morer-type deformation to an isotopy of one-forms
t 7→ λt := λ− d((1− tκ(R))f). (6.1)
We highlight two properties of this isotopy:
(1) The perturbed term −d((1− tκ(R))f) is not compactly supported.(2) In terms of the splitting T ∗M = T ∗F ⊕ spanR{dR, dI}, we have
−d((1− tκ(R))f)
(∂
∂I
)= 0
on the region {|I| ≥ N} for N > 0 sufficiently large. (See Proposition 2.3(f2).)
We start with providing the precise requirement for κ we want
Definition 6.1 (Cut-off function κ). Let ε > 0 be given and sϕ be the end-profile
function of a smoothing profile of NbhdZ2ε0(∂M) ∪Nbhd(∂∞M) that satisfies√ε
4< wd(ϕ) <
ε
8, ε0 < ht(ϕ) ≤ 3ε0
2.
Then we consider cut-off functions κ of the type
κ(t) =
{0 for 0 < t ≤
√2wd(ϕ)
1 for ε02 ≤ t ≤ 2ε0.
(In particular, we have suppκ′ ⊂ {√ε/4 < R < ε0/2}.) We call κ a deformation
function adapted to the smoothing profile.
Using this family of cut-off function, we introduce the associated deformationsof the given Liouville one form λ.

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 39
Definition 6.2 (Deformed Liouville form λκ). Let κ be any deformation functionadapted to the smoothing profile. We consider a deformation associated to κ of thegiven Liouville one form λ by
λκ := π∗CλC + π∗FλF + d(κ(R)f)(= λ− d((1− κ(R))f) (6.2)
and call it a κ-deformation of λ.
By definition,
λκ =
{λ on {R ≥ ε0
2 }π∗CλC + π∗FλF = λ− df on {R ≤ wd(ϕ)}
and dλκ = dλ = ω for all κ.
Proposition 6.3. Let ω = dλ(= dλκ) with λ, λκ and λt be as above. Then thereexists a diffeomorphism
φκ : M →M
that satisfies the following:
(1) φ∗κ(egtλt) = λ for some time-dependent function gt for 0 ≤ t ≤ 1, and
suppφκ ⊂{√
ε
4≤ R ≤ ε0
2
}.
(2) φκ is the time-one map of a time-dependent Lipschitz vector field Xt of theform Xt = b ∂
∂ν in (F, (µ, ν)) coordinates.(3) Xt satisfies dπF (Xt) = 0 = dR(Xt). In particular, φκ smoothly extends to
∂M and satisfies
dφκ(TF ⊕ 0TCRe≥0)|(p,(x,y) ⊂ (TF ⊕ 0TCRe≥0
)|φκ(p,(x,y)). (6.3)
In particular, it maps each leaf of FF to another.
Proof. We consider the one-parameter family of one-forms given by
λt = λ+ d(t(κ(R)− 1)f)
so that λ0 = λ and λ1 = λκ. Then we will construct a diffeomorphism φκ byconsider t-dependent family of the equation
φ∗t (egtλt) = λ0 (6.4)
as usual in Moser’s deformation method for a choice of a smooth family gt offunctions starting from φ0 = id, g0 = 0.
Assuming the existence of such φt and gt, we examine its defining equation (6.4)as usual. Let Xt be the generating vector field of φt. By differentiating (6.4) in t,we obtain
φ∗t (egt) · φ∗t
(∂
∂t(gt ◦ φt)λt +
∂λt∂t
+ LXtλt
)= 0.
By taking away φ∗t egt and stripping off φ∗t therefrom, we get the equation
∂
∂t(gt ◦ φt)λt +
∂λt∂t
+ LXtλt = 0. (6.5)
We recall∂λt∂t
= d(κ(R)f)
from the definition of λt. We also have
LXtλt = d(Xtcω) +Xtcω

40 YONG-GEUN OH
by the Cartan’s magic formula followed by the identities dλt = dλ = ω. We set
ht =∂
∂t(gt ◦ φt) (6.6)
and then (6.5) becomes
htλt +Xtcω + d(κ(R) f +Xtcλt) = 0.
Therefore we split (6.5) into
κ(R) f +Xtcλt = 0, (6.7)
htλt +Xtcω = 0. (6.8)
and separately solve this equation in order by first solving (6.7) and then (6.8). Oncethe first is solved, the second equation will uniquely determine ht by nondegeneracyof ω and then gt by setting g0 = 0 as the initial condition.
Therefore it remains to solve the equation (6.7). We will find a good solutionXt for the algebraic equation
Xtcλ = −κ(R))f (6.9)
which would enable us to find a solution of the ODE x = Xt(x) which would doour purpose of proving the proposition.
For this purpose, we recall by the choice of gt above, we have
suppκ(R)f ⊂ {R ≥ wd(ϕ)}.
We express Xt
Xt = XFt + a
∂
∂µ+ b
∂
∂ν
in terms of the splitting TM = TF ⊕ spanR
{∂∂µ ,
∂∂ν
}and will find a suitable
solution XFt , a, b for some vector field XF
t ∈ TF and coefficient functions a, b. Werecall R = e−µ, ν = I and decompose
λt = π∗FλF + π∗CλC + d((1− tκ(R)f)
= π∗FλF + (1− tκ(R))df + (π∗CλC − κ′(R)f dR)
= (π∗FλF + (1− tκ(R))df) +(π∗CλC + κ′(e−µ)f e−µdµ
)into the F -component and the C-component. Therefore we have
Xtcλt = (λF + (1− tκ(R))df)(XFt ) + a(αν + κ′(e−µ)e−µf)− b(1− α)e−µ.
Then (6.9) becomes the equation
(λF + (1− tκ(R))df)(XFt ) + a(αν − κ′(e−µ)e−µf)− b(1− α)e−µ = −κ(e−µ) f.
Motivated by this, we put the requirement
XFt ≡ 0, a = 0, b =
κ(e−µ) f
(1− α)e−µ
so that
Xt =κ(e−µ) f
(1− α)e−µ∂
∂ν=
κ(R)f
(1− α)R
∂
∂I.
Then it follow from definition that

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 41
• Xt is supported and is bounded on
{(x, µ, ν) | R ≥ wd(ϕ)}since κ is so: This is because we have
0 ≤ κ(R)
R≤ 1
wd(ϕ)
and supp f ⊂ F0 for a compact F0 ⊂ F when |ν| > N .• Xt is globally Lipschitz on Nbhd(∂∞M ∪ ∂M).• Since Xt is multiple of ∂
∂ν , π∗FλF (Xt) = 0 = dR(Xt).
Since Xt is Lipschitz, the flow exists for all time until it hits the boundaryof a given neighborhood Nbhd(∂∞M ∪ ∂M) of our interest. Since Xt ≡ 0 on{R ≤ wd(ϕ)}, the flow extends to ∂M . Furthermore the flow also preserves thelevel of R and smoothly extends to ∂M .
Now the equation (6.8) uniquely determines ht. Therefore the function gt isuniquely determined by first solving the ODE x = Xt(x), x(0) = x and then byintegrating the defining equation of ht
ht =∂
∂t(gt ◦ φ−1
t )
in t with the initial condition g0 = 0. This completes solving the equation (6.5)for (φt, gt) and hence (6.4). By setting t = 1, we have found (φ, g) = (φ1, g1) thatsatisfies
φ∗(egλκ) = λ.
This finishes the proof. �

42 YONG-GEUN OH
Part 2. Sectorial Floer data and the maximum principle
Let us recall that it is common to endow a Liouville manifold with an almost-complex structure J of contact type for which we have the equation
− d(d(s ◦ v) ◦ j) = v∗dλ. (6.10)
This enables one to prove C0 estimate via the maximum principle as follows:
• First of all, the equation implies subharmonicity ∆(s◦v) ≥ 0 of the functions ◦ v so that the maximum principle applies.• If a Lagrangian L satisfies the property that L∩s−1(s0) is Legendrian for alls0 ∈ R large enough, which always holds for cylindrical (i.e., Z-invariant)Lagrangians, then the strong maximum principle also applies to s ◦ v.
In general such an identity fails to hold for almost complex structures that are notof contact type—for example, the cylindrical-at-infinity almost complex structuresused in [GPS20]. In particular, one cannot easily apply the maximum principle typearguments, if possible at all. This is the reason why [GPS20] uses monotonicityarguments in their C0-estimates, and utilized the class of dissipative Hamiltoniansto establish C0 estimates in defining symplectic cohomology for sectors.
In this part, we will introduce the notion of λ-sectorial almost complex structures,which exist in abundance and allow for maximum principle arguments. Then weintroduce the sectorial Floer package by identifying the classes of Hamiltoniansand of Lagrangian submanifolds which correctly pair with the λ-sectorial almostcomplex structures.
7. Set-up for the maximum principle
We start with a well-known definition in several complex variables (and itsalmost-complex version). (See [CE], for example.)
Definition 7.1. Let (M,J) be an almost complex manifold.
(1) We call a function ψ : M → R J-convex (resp. weakly J-convex) if theLevi-form
−d(dψ ◦ J)
is positive definite (resp. positive semi-definite.) When ψ is an exhaustionfunction of IntM in addition, we call it a J-convex exhaustion function.
(2) We also call such a pair (ψ, J) a pseudoconvex pair.
Such a function is more commonly called a plurisubharmonic (resp. weaklyplurisubharmonic) function in several complex variable theory.
We recall some general definitions of quantitative measure of J-pinching.
Definition 7.2. Let M be given a Riemannian metric g and denote by S(TM)the unit disc bundle of TM . Let U be a neighborhood of ∂M . Consider an almostcomplex structure J and a two-form η on U . We define
[η](J;U) := inf{η(v, Jv) | v ∈ Sx(T∂M), x ∈ U}
and call it the J-pinching lower bound of η on U ⊃ ∂M .
Remark 7.3. We always assume that the metric is of bounded geometry, i.e., thatit has bounded curvature and its injectivity radius inj(g) ≥ δ for some δ > 0. If Jis tame with respect to ω on U , it is easy to see that [ω](J;U) > 0.

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 43
Remark 7.4. A similar notion was considered in [CE] to provide a quantita-tive measurement of pseudo-convexity for the Levi form when the Levi form isJ-positive. In our case, we apply the notion to an arbitrary 2-form.
Applying Definition 7.1 to −ψ = logϕ, we write the standard notion of pseudo-convex boundary in several complex variable theory as follows.
Definition 7.5 (Pseudoconvex-type boundary). Let (M,J) be an almost complexmanifold with boundary ∂M . We say an almost complex structure J on M is of∂M -pseudoconvex type if there exists a function ϕ : M → R such that
• ∂M = ϕ−1(0) and ϕ > 0 on Nbhd(∂M) \ ∂M .• There is a constant ε0 such that
[d(d(logϕ ◦ J))](J;Uε0 ) ≥ 0 (7.1)
where
Uε0 = {0 < ϕ ≤ ε0}.(I.e., − logϕ is weakly J-convex on Uε0 .)
When (7.1) is replaced by the pinching condition
[d(logϕ ◦ J)](J;Uε0 ) ≥ C
for some constant C ∈ R, we call such ∂M J-pinched below and C the J-pinchinglower bound.
Remark 7.6. When J is given, the existence of ϕ depends only on the germ ofthe neighborhoods of ∂M . In fact, if C > 0 (resp. C = 0), being pinched belowby C agrees with the standard notion of strong pseudoconvexity (resp. (weak)pseudoconvexity) of the boundary (relative to J).
Remark 7.7. (1) If ∂M is compact, the existence of the constant ε0 > 0 isautomatic once there exists a ∂M -pseudoconvex type J , and is unnecessaryto state as one of the defining conditions above. However, when ∂M isnoncompact, the existence of a uniform size ε0 is not automatic and requiressome good behavior of ∂M at infinity. The Liouville sectors have thisgood behavior at infinity by its Z-completeness. Moreover any cylindricalcomplex structure in the sense of [GPS20] is of ∂M -pseudoconvex typeoutside a neighborhood the corner.
(2) On the other hand, we will see that the sectorial almost complex structureis of ∂M -pseudoconvex type on a full punctured neighborhood of ∂M .
The ∂M -pseudoconvexity (or more generally ∂M -pinching) for an ω-tame almostcomplex structure on symplectic manifolds (M,ω) has the following consequence.
Proposition 7.8. Let (M,ω) be a symplectic manifold, possibly with corners.Equip it with a an almost-complex structure J for which the Riemannian metricg = ω(·, J ·)) is complete and has bounded geometry, but is not necessarily tame toω. Finally, we also assume that J is of ∂M -pseudoconvex type (Definition 7.5).
Suppose v : Σ → M is a J-holomorphic map. Then for the classical Laplacian∆, and for any function ϕ : M → R as in Definition 7.5, we have
∆(logϕ ◦ v)ωΣ ≥ C v∗ω
for some constant C ≥ 0. In particular, − logϕ ◦ v is a subharmonic function.

44 YONG-GEUN OH
Proof. For an arbitrary function ϕ, we compute
−d(d(− logϕ ◦ v) ◦ j) = d(d(logϕ)Jdv) = v∗(d(d(logϕ)J)).
For any unit tangent vector ξ ∈ TzΣ, we evaluate
v∗(d(d(logϕ)J))(ξ, jξ) = d(d(logϕ)J) (dv(ξ), dv(jξ)) = d(d(logϕ)J) (dv(ξ), Jdv(ξ)) .
Therefore Definition 7.2 tells us
v∗(d(d(logϕ)J))(ξ, jξ) = d(d(logϕ)J) (dv(ξ), Jdv(ξ))
≥ [d(d(logϕ)J)](J;Uε)|dv(ξ)|2g.We have the standard comparison inequality between two metrics of bounded ge-ometry1, namely g and a choice of ω-tame metric gJ′ = ω(·, J ′·):
|dv(ξ)|2g ≥ C ′|dv(ξ)|2gJ′where C ′ depends only on g and gJ′ . We also have a standard inequality
|dv(ξ)|2gJ′ ≥ C′′′v∗ω(ξ, jξ).
(See [Oh15, Proposition 7.2.3] for example.) By the assumption that J is of ∂M -pseudoconvex type, we may as well take ϕ to be a function satisfying the propertiesin Definition 7.5. Thus we have:
[d((logϕ) ◦ J)](J;Uε)] ≥ C′′
for some constant C ′′. By setting C = C ′C ′′C ′′′, we have finished the proof. �
Example 7.9. For the cylindrical J in the sense of [GPS20, Section 2.10] we maytake ϕ = R and witness a vanishing
d(d(logϕ) ◦ J) = 0
on a neighborhood NbhdZ(∂M).
The following general results are the reason why we consider the interpolationby a convex function ϕ.
Proposition 7.10. Let ϕ : Rk → R+ be any (weakly) convex function with ∂ϕ∂xi
>0. Let gi : M → R be a smooth functions for i = 1, . . . , k. Let J be an almostcomplex structure J tame to a symplectic form ω of M . Then the following hold:
(1) The functionG := ϕ(g1, . . . , gk) : R→ R
satisfies
−d(dG ◦ J) =∑j
∑i
∂2ϕ
∂xj∂xi(g1, . . . , gk)) (dgj ◦ J) ∧ dgi
−∑i
∂ϕ
∂xi(g1, . . . , gk)) d(dgi ◦ J). (7.2)
(2) Assume all gi are J-plurisubharmonic (resp. J-weakly plurisubharmonic)Then if v : Σ → M is J-holomorphic, then f := G ◦ v : Σ → R is J-plurisubharmonic (resp. J-weakly plurisubharmonic)
1Recall that a Riemannian metric is said to have bounded geometry if (i) its injectivity radius
is bounded away from zero, and (ii) the norms of the covariant derivatives of the curvature tensorare uniformly bounded.

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 45
Proof. We compute dG =∑i=1
∂ϕ∂xi
(g1, . . . , gk)) dgi and so
dG ◦ J =∑i=1
∂ϕ
∂xi(g1, . . . , gk)) dgi ◦ J.
Therefore by taking the differential of this and a rearrangement, we obtain
−d(dG◦J) =∑j
∑i
∂2ϕ
∂xj∂xi(g1, . . . , gk)) dgi◦J∧dgj−
∑i
∂ϕ
∂xi(g1, . . . , gk) d(dgi◦J)
which is (7.2).For the second statement, let v : (Σ, j) → (M,J) be J-holomorphic. Then we
compute
−d(d(G ◦ v) ◦ j) = −d(dG ◦ J) ◦ dv) = −v∗d(dG ◦ J)
=∑j
∑i
∂2ϕ
∂xj∂xi(g1(v), . . . , gk(v)) v∗(d(gi ◦ J) ∧ dgj)
−∑i
∂ϕ
∂xi(g1(v), . . . , gk(v)) v∗d(dgi ◦ J).
Then the first summand is semipositive (1, 1)-form (with respect to J) since the
Hessian matrix ∂2ϕ∂xj∂xi
is positive semidefinite while the second summand is so
because ∂ϕ∂xi
> 0 by definition, and each gi is assumed to be plurisubharmonic
(resp. weakly plurisubharmonic) with respect to Ji, and so −d(dgi ◦J) is a positive(resp. semipositive) (1, 1)-form. �
Once sϕ is proven to be an exhaustion function on Nbhd(∂∞M ∪∂M), if we findan almost complex structure J for which (sϕ, J) becomes a pseudoconvex pair, thisproposition will ensure uniform C0-bound for the J-holomorphic curves.
Remark 7.11. When we apply this proposition to our circumstance, one essentialcomplication arises when we consider the interpolation
ϕk+1(R1, · · · , Rk, e−s)
It is easy to define almost complex structures in a disjoint component of the sectorialcorner
NbhdZ(∂M) \Nbhd(∂∞M)
and in the ceiling corner
Nbhd(∂∞M) \NbhdZ(∂M)
respectively on with respect to which each Ri and s are J-plurisubhhamonic. Anessential task then is to glue them without destroying the pseudoconvexity of thepair (sϕ, J). Because the hypersurface {s−1(c)} (nontrivillay) intersects sectorialcorners at infinity and also because the collection of hypersurfaces
{R−1i (ci)}ki=1
⋃{s−1(c)}
no longer forms a coisotropic collection, this gluing process is a nontrivial task. Weaccomplish it in the next section.
We will prove the following existence theorem in the next two sections, whoseprecise form will be given along the way.

46 YONG-GEUN OH
Theorem 7.12. Let (M,dλ) be a Liouville sectors with corners. Then there existsa pseudoconvex pair (ψ, J) in a neighborhood
Nbhd(∂∞M ∪ ∂M)
such that the function ψ ◦ u is also amenable to the strong maximum principle forany J-holomorphic curves with boundary condition u(∂Σ) ⊂ L with Z-invariant-at-infinity Lagrangian L.
In fact, we will see that any pair of
(ψ, J) = (wiggled end profile function, its associated λ-sectorial almost complex structure),
is one such pair.
Remark 7.13. The pair
(ψ, J) = (end profile function, its associated sectorial almost complex structure)
is a pseudoconvex pair but does not satisfy the additional condition on the amenabil-ity of strong maximum principle with Z-invariant Lagrangian submanifolds. How-ever it does for a different class of Lagrangians called gradient-sectorial Lagrangiansubmanifolds with respect to the end-profile function sϕ (see [Oh21]). This classof Lagrangians is more convenient than the Z-invariant ones for the purpose ofstudying the Kunneth-type maps.
8. λ-sectorial almost complex structures
In this section, we introduce a new class of almost complex structures whichweakens the properties of both contact-type and cylindrical almost complex struc-tures; this enables us to apply the maximum principle near both ∂M and ∂∞M(and hence establishing Gromov compactness).
8.1. Remarks on the common choices of J . As usual, let s : Nbhd(∂∞M)→ Rbe a cylindrical coordinate on M associated to a symplectization. In the literatureit is common to choose an almost-complex structure J satisfying conditions (C1)and (C2) below:
(C1) J is an extension of an almost complex structure on the contact distributionξ ⊂ ker ds on each level set of s, and
(C2) In some neighborhood of ∂∞M ,
J(Z) = Xθ, J(Xθ) = −Z
where Xθ is the Reeb vector field for the contact form α on a level set of s.
We note that J satisfies the above conditions if and only if it satisfies the following:
(C1’) In some neighborhood of ∂∞M , J is invariant under the flow of the Liouvillevector field Z, and
(C2’) In some neighborhood of ∂∞M , ds ◦ J = −λ.
(The equation ds ◦ J = −λ itself, without condition (C1’), is weaker than thecombination of (C1) and (C2).) The above conditions allow for the use of maximumprinciples in proving C0-estimates for J-holomorphic curves.
The authors of [GPS20] instead work with J that satisfy the following:
(i) J is cylindrical (i.e., invariant under Z near infinity), and(ii) The projection πC is holomorphic on a neighborhood of ∂M .

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 47
This last requirement is not compatible with the requirement for J to be of contact-type in a neighborhood of the ideal boundary ∂∞M . This is one reason why ibid.—after requiring (i) and (ii)—must employ monotonicity arguments (as opposed tomaximum principle arguments) to study pseudoholomorphic curves on the Liouvillesector.
In our construction of sectorial almost complex structures we will interpolate a‘contact type-like’ condition near ∂∞M with suitable convexity requirements near∂M . (See Proposition 8.14.) We will use the end-profiles function sϕ for thispurpose.
Remark 8.1. It would have been enough to consider almost complex structures Jfor which the pair (sϕ, J) is a pseudoconvex pair, i.e., those J for which
−d(dsϕ ◦ J) ≥ 0
if we would like to apply maximum principle arguments only for unperturbed J-holomorphic curves without boundary. All complications in the process of definingsectorial almost complex structures arise because we would like to apply the max-imum principle also to Hamiltonian-perturbed pseudoholomorphic curves (see theproofs of Proposition 12.2 and Theorem 13.1) as well as to apply the strong maxi-mum principle to the case with boundary. (See the proof of Theorem 11.3.)
Compare the simplicity of our definition of sectorial Hamiltonians (Definition 9.2)with the complexity of the definition of the dissipative Hamiltonians used in [GPS20]which are needed to achieve the confinement results via the monotonicity argu-ments. In our sectorial framework, such complications are subsumed in our carefulgeometric preparation of the description of background geometry of Liouville sectorsrelated to smoothing of corners of the Liouville sectors leading to the definition ofsectorial almost complex structures. Once these are achieved, our effort is compen-sated by the simplicity and naturality of the definition of λ-sectorial Hamiltonians(see Definition 9.2).
8.2. Definition of κ-sectorial almost complex structures. At the end of theday, we came up with the following definition of κ-sectorial almost complex struc-tures as a tool for constructing the final class of almost complex structures inSubsection 8.4 that are amenable both to the maximum principle and to the strongmaximum principle for the associated pseudoholomorphic curves with the boundarycondition of the Z-invariant Lagrangians.
Given a splitting data
U := Nbhd(∂M) ∼= F × CRe≥0, {(R, I)},
we have two natural symplectic foliations whose associated involutive distributionsare given by
DF := ker dπC, DC := ker dπF ,
respectively. They induce a split short exact sequence
0→ DF → TU → DC → 0
on U . Its dual sequence is given by
0→ DωC → T ∗M |U → Dω
F → 0

48 YONG-GEUN OH
via the identification T ∗F ∼= DωC and T ∗C ∼= Dω
F . We denote by FF the associatedfoliation whose leaves are given by
F × {(x, y)}, (x, y) ∈ CRe≥0.
Using this we give the definition of κ-sectorial almost complex structures in termsof T ∗M not TM which is more useful to study the pseudoconvexity of the pair(ψ, J) in general.
Definition 8.2. Let (M,λ) be a Liouville sector with boundary and corners. Anω-tame almost complex structure J on a Liouville sector is said to be κ-sectorial(with respect to the given smoothing profile) if J satisfies the following:
(Jκ1) [FF is J-complex] In a neighborhood of NbhdZ(∂M) of ∂M , we require
J(T ∗F ⊕ 0span{dµi,dνi}ki=1
)⊂ T ∗F ⊕ 0span{dµi,dνi}ki=1
, (8.1)
and J restricts to an almost complex structure of contact-type on F .(Jκ2) [dsϕ is J-dual to λκ] In a neighborhood NbhdZ(∂M) ∪ ∂∞M) of ∂M \
Nbhd(∂∞M), we have
−dsϕ ◦ J = π∗FλF + π∗CλC + d(κ(R)f)
for a cut-off function κ given in Definition 6.1.
Here we refer to Proposition 2.3 for the definition of f .Note that Condition (Jκ2) implies that the pair (sϕ, J) forms a pseudoconvex
pair since it implies
−d(dsϕ ◦ J) = dλ ≥ 0
as a (1, 1)-current. In fact, the following simple definition is used in [Oh21] for aconstruction of wrapped Fukaya category whose objects are not the Z-invariantLagrangians but those which are invariant-at-infinity under the gradient flow of sϕ:
Definition 8.3 (Sectorial almost complex structures [Oh21]). Let (M,λ) be aLiouville sector with boundary and corners. An ω-tame almost complex structureJ on a Liouville sector is said to be λ-sectorial (with respect to the given smoothingprofile) if J satisfies the following:
(1) [FF is J-complex] In a neighborhood of NbhdZ(∂M) of ∂M , we require
J(T ∗F ⊕ 0span{dµi,dνi}ki=1
)⊂ T ∗F ⊕ 0span{dµi,dνi}ki=1
, (8.2)
and J restricts to an almost complex structure of contact-type on F .(2) [(sϕ, J) is a pseudoconvex pair] In a neighborhood NbhdZ(∂M) ∪ ∂∞)
of ∂M \Nbhd(∂∞M), we have
−d(dsϕ ◦ J) ≥ 0.
We will not use this definition at all in the present paper since we still employthe Z-invariant Lagrangian submanifolds as objects of wrapped Fukaya categoryFuk(M).
8.3. Existence of κ-sectorial almost complex structures.

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 49
8.3.1. A coordinate change. Instead of using (R, I) coordinates for the complexnumbers, we will utilize coordinates (− logR, I) (which of course changes the formof both λαC and of ωC). These coordinates have the intuition that approaching R = 0is akin to approaching ∞—not in the Liouville flow direction, but in the directiontoward ∂M . We will later justify this intuition by showing that, for sectorial J , ifany member of a continuous family of J-holomorphic curve has image constrainedto the region R > 0, then every member of that family is so constrained. SeeRemark 12.3.
Notation 8.4 (µ, ν). Let
µ = − logR, ν = I. (8.3)
In what follows, we will describe almost-complex structures J in terms of thecotangent bundle
T ∗(Nbhd(∂M) \ ∂M) ≈ T ∗F × T ∗CRe>0 = T ∗F ⊕ spanR{−dR, dI}instead of the tangent bundle T (Nbhd(∂M) \ ∂M).
Remark 8.5. Note that dµ and dν are non-vanishing and linearly independentat every point of Nbhd(∂M) \ ∂M. So in this region, we can uniquely express anyco-vector γ—in particular, dµ ◦ J and dν ◦ J— in the form
dµ ◦ J = ηµ + a dµ+ b dν, dν ◦ J = ην + c dµ+ d dν (8.4)
for some constants a, b, c, d and ηµ, ην ∈ T ∗F . The reader should later comparethis to (8.7).
Remark 8.6. The factorization F×C{Re≥0} is crucial for the definition of sectorialalmost complex structures although the equation (8.4) itself is an equation in thetangent distribution level and does not require integrability of the subbundle TF ⊂T∂X|F into a submanifold F . See Definition 8.17 (Jκ1), and the beginning of theproof of Theorem 8.18.
We consider the change of coordinates of (0,∞)× R→ R2
σ : (0,∞)× R→ R2; σ(x, y) = (− log x, y) =: (u, v).
Notation 8.7 (πC). On Nbhd(∂M) \ ∂M , we have two projections
πC = (R, I) : M → (0,∞)× R, πC = (µ, ν) : M → R2
where we define
πC = σ ◦ πC. (8.5)
Recall the Liouville form λαC (2.1) and restrict it to CRe>0∼= (0,∞)×R. Denoting
the standard coordinates of R2 by (u, v), we denote the pushforward form of λC toR2 by
λαC := e−u((1− α)dv + αvdu).
Then we have
π∗CλαC = e−µ((1− α)dν + ανdµ) (8.6)
on Nbhd(∂M) \ ∂M .
Remark 8.8. Note that π∗CλαC is equal to π∗Cλ
αC on Nbhd(∂M) \ ∂M . The tilde
notation connotes both the restriction on the domain, and our preference to workwith (µ, ν) coordinates rather than (R, I) coordinates.

50 YONG-GEUN OH
The following will be useful later in applying the consistency criterion laid out inProposition 8.12 to guarantee the existence of certain almost-complex structures.
Proposition 8.9. On Nbhd(∂M) \M ,
(i) For all 0 < α < 1, π∗CλαC is linearly independent of dµ. (Though we will
not utilize this: π∗CλαC is also linearly independent of dν if we further assume
ν 6= 0.)
(ii) Let 0 < α < 1 and consider the function hαC from (2.5). Then d(π∗C(hαC))
is linearly independent of π∗CλαC and dν. (Though we will not utilize this:
d(π∗C(hαC) is also linearly independent of dµ if we further assume ν 6= 0.)
Proof. (i) is obvious from (8.6). For (ii), we compute
d(π∗C(hαC) =1
2d(((1− α)e−2µ + αν2)
)= −(1− α)e−2µdµ+ ανdν.
Comparing this with (8.6), the lemma follows. �
8.3.2. Some linear algebra (a consistency check). We begin with a linear algebracomputation.
Notation 8.10. Let V be a finite-dimensional real vector space and equip V witha splitting V = VF ⊕ VC . We assume VC is two-dimensional, and we further fix abasis {u, v} of VC . If G is an endomorphism of V , let us write
Gu = ηu + au+ bv, Gv = ηv + cu+ dv (8.7)
where ηu and ηv are the projections of Gu and Gv, respectively, to VF .
The following shows that a block-upper-triangular almost-complex structure Gis uniquely extendable from VF by specifying one of Gu or Gv.
Proposition 8.11. The assignments
G 7→ (G|VF , ηu, a, b), G 7→ (G|VF , ηu, au+ bv),
define bijections between
(1) The set of R-linear endomorphisms G : V → V satisfying G2 = −1 andG(VF ⊕ 0) ⊂ VF ⊕ 0.
(2) The set of quadruplets (A, η, x, y) where A is an endomorphism of VF sat-isfying A2 = −1, η is an element of VF , x is an arbitrary real number, andy is a non-zero real number.
(3) The set of triples (A, η,w) where A and η are as above, and w is a vectorof VC linearly independent from u.
Likewise, the assignments G 7→ (G|VF , ηv, c, d) and G 7→ (G|VF , ηu, cu + dv) definebijections between the set of almost-complex structures on V preserving VF , and
2’. The set of quadruplets (A, η, x, y) where now only x is required to be non-zero.
3’. The set of triples (A, η,w) where A and η are as above, and w is a vectorof VC linearly independent from v.

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 51
Proof. Assume G is in the set 1. and write G in matrix form as
G =
A ηu ηv0 a c0 b d
.
We first claim that the data (A, ηu, a, b) uniquely determine the third column. Thisproves that the assignment from 1. to 2. is an injection.
To prove the claim, note that G2 = −1 implies that the lower-right 2-by-2 matrixalso squares to -1. From this we deduce
• a2 + bc = −1, and hence b and c must be non-zero (we have assumed thatV is a real vector space) and• a = −d.
(Indeed, these two requirements are equivalent to demanding that the 2-by-2 matrixsquares to -1.) So the pair (a, b) determines the pair (c, d).
To finish the proof of the claim, we note that the two constraints
Aηu + aηu + bηv = 0 = Aηv + cηu + dηv
implies that a choice of ηu uniquely determines ηv and vice versa by the formulae
ηv = −1
b(A+ a)ηu ηu = −1
c(A+ d)ηv (8.8)
(keeping in mind that bc 6= 0).To show that the map from 1. to 2. is a surjection, one needs only check that
the two equations in (8.8) are consistent; this is straightforward. Noting that thecondition “b 6= 0” is equivalent to the condition “w = au+bv is linearly independentfrom u,” we see that the map from 1. to 3. is also a bijection.
That the maps from 1. to 2’. and 3’. are bijections follows analogously. �
Proposition 8.12. Fix an almost-complex structure on T ∗F and a smooth 1-formτ whose T ∗C component is linearly independent from dµ. Then, on Nbhd(∂M) \∂M , there exists a T ∗F -preserving almost-complex structure J for which dµ ◦ J =τ . Alternatively, if the T ∗C component of τ is linearly independent of dν, onNbhd(∂M) \ ∂M there exists a T ∗F -preserving almost-complex structure J forwhich dν ◦ J = τ .
Proof. Apply Remark 8.5 and Proposition 8.11 by setting
V = T ∗xM, VF = T ∗πF (x)F, VC = T ∗πC(x)C, G = Jx.
�
8.3.3. Strategy of the proof of existence.
Notation 8.13 (N, ε, ε0). We consider mutually disjoint neighborhoods
Nbhd2ε0(∂M) \Nbhd(∂∞M) ⊂ ∂M \Nbhd(∂∞M) (8.9)
and
Nbhds≥N (∂∞M) \NbhdZε (∂M) (8.10)
for some N > 0 and 0 < ε < ε0.
So we define J on the above two neighborhoods (8.9) and (8.10) by putting thefollowing conditions:

52 YONG-GEUN OH
(J1) In a neighborhood of NbhdZ(∂M) of ∂M , using the splitting (2.2), werequire
J(T ∗F ⊕ 0span{dµi,dνi}ki=1
)⊂ T ∗F ⊕ 0span{dµi,dνi}ki=1
, (8.11)
and J restricts to an almost complex structure of contact-type on F .(J2a) In a neighborhood Nbhd2ε0(∂M) \Nbhd(∂∞M) of ∂M \Nbhd(∂∞M), we
have
−dµi ◦ J = π∗C,iλC + π∗FλF
for i = 1, · · · , k.(J2b) In a neighborhood Nbhds≥N (∂∞M) \ NbhdZε (∂M) for some N > 0 and
0 < ε < ε0, we have
−ds ◦ J = λ
(J2c) In a neighborhood
Nbhd(∂∞M) ∩NbhdZε0(∂M)
of the ceiling of each sectorial corner in ∂∞M ∩ ∂M , we have
−dsk+1,ϕ ◦ J = λκ
for a cut-off function κ : [0,∞)→ [0, 1].
The following is the key proposition in which the special properties of the bar-rier functions ϕ crucially enters and enables us to interpolate the almost complexstructure of ‘contact type-like’ near ∂∞M and the one of ‘cylindrical type-like’ onF × C used in [GPS20] near ∂M .
Proposition 8.14 (Interpolation). Let κ be the function κ appearing in Condition(J2c) above and write
λκ = π∗CλC + π∗FλF + d(κ(R)f). (8.12)
Then
(1) We can choose ϕ so that ε0 ≤ ht(ϕ) < 32ε0 < 2ε0.
(2) There exists a sufficiently small 0 < ε1 ≤ ε08 and a function κ such that
Condition (J2c) is admissible, i.e., that there exists some J that satisfies
−dsk+1,ϕ ◦ J = λκ
and is compatible with Conditions (J1) and (J2a)-(J2c) for all ϕ satisfying0 < wd(ϕ) < ε1.
The proof of this proposition will occupy the next entire subsection.
8.3.4. Proof of compatibility. We start from Condition (J1) by choosing a compati-ble JF on F . For the simplicity of exposition, we assume k = 1. For the case k > 1,not much is different and so left to the readers.
Then we recall from Remark 3.14
ϕ(x, y) =
{x for y ≥ ht(ϕ), x ≤ wd(ϕ)
y for x ≥ ht(ϕ), y ≤ wd(ϕ)
and ϕ(x, y) smoothly interpolates the two functions x, y.Therefore it remains to verify the condition can be extended to the rest of the
interior so that the condition becomes also compatible to Condition (J1).

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 53
To motivate the arguments we use below, we first outline the structure of theproof:
• First we verify that the proof boils down to Lemma 8.15 below.• Then we verify that the proof of this lemma eventually relies on the simple
fact that
d(ϕ(R, e−s
)), π∗CλC
are linearly independent for es = I1/α for α > 0.
We recall from Proposition 2.3 that f does not depend onR, I on Nbhds≥N (∂∞M)for a sufficiently large N so that Z is tangent to ∂M . Therefore the decomposition
λ = π∗CλC + (π∗FλF + df)
respects the splitting TC⊕ TF thereon. Similarly we can also decompose
π∗CλC + π∗FλF + d(κ(R)f) = π∗CλC + π∗FλF + κ(R)df + κ′(R)f dR
= (π∗CλC + κ′(R)fdR) + (π∗FλF + κ(R)df).
By decomposing the second summand, the T ∗F -component, into a sum
v1 + v2 = π∗FλF + κ(R)df (8.13)
for a suitably given pair (v1, v2), we can write
ds1+1,ϕ|TC ◦ J = −π∗CλC − κ′(R)fdR− v1
and
ds1+1,ϕ|TF ◦ J = −v2.
(See Condition (J1) above.) By definition of s1+1,ϕ, we have
ds1+1,ϕ =1
ϕ
(∂ϕ
∂x(R, e−s)dR− ∂ϕ
∂y(R, e−s)e−s ds
),
where we decompose ds into T ∗C and T ∗F components in T ∗M = T ∗C⊕ T ∗F
ds = dsC + dsF , dsC := πT∗C(ds), dsF := πT∗F (ds).
We recall from (4.1)
πT∗C(ds) =1
αIdy.
Then if we fix v2, the defining conditions of κ-sectorial almost complex structuresrequire J to satisfy the relationships
1
ϕ
(∂ϕ
∂x(R, e−s)dR− ∂ϕ
∂y(R, e−s)e−s dsC
)◦ J = −π∗CλC − κ′(R)fdR− v1,
dsF ◦ J = −v2
In fact, Condition (J1) has already determined the vector v2 as the value of ds1+1,ϕ|TF ◦J and in turn determines
v1 = π∗FλF + κ(R)df − v2
by (8.13). Therefore it remains to verify that the requirement for J to satisfy
1
ϕ
(∂ϕ
∂x(R, e−s)dR− ∂ϕ
∂y(R, e−s)e−sdsC
)◦ J = −π∗CλC − κ′(R)fdR− v1,
is admissible. For this purpose, it is enough to prove the following lemma.

54 YONG-GEUN OH
Lemma 8.15. Let 0 < α ≤ 1. If we choose N = N(α) > 0 sufficiently large, thetwo vectors
∂ϕ
∂x(R, e−s)dR− ∂ϕ
∂y(R, e−s)e−sdsC, −π∗CλC − κ′(R)fdR
are linearly independent on a neighborhood Nbhds1+1,ϕ
s≥N (∂∞M ∪∂M) of our currentinterest.
Proof. We have
−π∗CλC − κ′(R)fdR = −((1− α)RdI − αIdR)− κ′(R)fdR
= (αI − κ′(R)f)dR− (1− α)RdI. (8.14)
Therefore, recalling from Proposition 8.14 that |κ′ε| ≤ 4ε0
= 2ε0× 2 and that |f | is
bounded, we derive that −π∗CλC − κ′(R)fdR is always nowhere vanishing on theregion of our interest if 0 < α < 1 and provided I is sufficiently large, say,
I ≥ 4|f |C0
αε0=: N1
when α = 1.On the other hand, in (4.6) we have computed
∂ϕ
∂x(R, e−s)dx− ∂ϕ
∂y(R, e−s)e−sdsC =
∂ϕ
∂x(R, e−s)dx−
(∂ϕ
∂y(R, e−s)e−s
)1
αIdy.
(8.15)We also recall from (3.24)
0 <∂ϕ
∂x,
∂ϕ
∂y≤ 1.
To check the linear independence of the two vectors, we evaluate the determinant∣∣∣∣(αI − κ′(R)f) −(1− α)R∂ϕ∂x −∂ϕ∂y e
−s × 1αI
∣∣∣∣ =: D
keeping the insertion of (R, e−s) into ∂ϕ∂x ,
∂ϕ∂y in our mind. We compute
D =
(−1 +
κ′(R)f
αI
)∂ϕ
∂ye−s + (1− α)R
∂ϕ
∂x
We note∂ϕ
∂ye−s = y
∂ϕ
∂y
∣∣∣(x,y)=(R,e−s)
, R∂ϕ
∂x= x
∂ϕ
∂x
∣∣∣(x,y)=(R,e−s)
.
Therefore if we choose s so large that e−s ≤ 2√ε (see (3.29)), we have
∂ϕ
∂ye−s ≥ R∂ϕ
∂x
by Lemma 3.15. This then implies
D ≤(−1 +
κ′(R)f
αI+ (1− α)
)∂ϕ
∂ye−s∣∣∣(x,y)=(R,e−s)
.
The right hand side becomes negative provided
−1 +κ′(R)f
αI+ (1− α) =
κ′(R)f
αI− α < 0.

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 55
The latter inequality can be achieved, if we choose I so that
I >‖κ′‖C0‖f‖C0
α2=: N2(α). (8.16)
We setN := max{N1, N2}.
Then if we choose the constant T0 and the cut-off function κ so that
T0
√ε ≥ ε0
2and that
suppκ′ ⊂{√
2wd(ϕ) ≤ R ≤ ε02
}, (8.17)
we achieve the inequality∂ϕ
∂ye−s ≥ R∂ϕ
∂x
for all (x1, x2) satisfying
x1 ≥√ε
4, 0 < x2 < 2
√ε
on the region{R ≥
√ε/4, e−s < 2
√ε}
={R ≥
√ε/4, s > − log(2
√ε)}. (8.18)
This implies that D does not vanish on the region of our interest with I > N . Thisfinishes the proof. �
By combining Proposition 8.12 and Lemma 8.15, we have finished the proof ofProposition 8.14.
8.4. Definition of λ-sectorial almost complex structures. Suppose that sucha diffeomorphism φκ constructed in Proposition 6.3 is given. The following is animmediate corollary of this proposition.
Corollary 8.16. Define a function sϕ,κ to be the composition
sϕ,κ = sϕ ◦ φκ.Then sϕ,κ is an exhaustion function of the neighborhood
NbhdZ2ε0(∂M) ∩Nbhd(∂M).
We call it a λκ-wiggled end-profile function.
By applying φκ to the J-duality equation (Jκ2), we get
−d(sϕ,κ ◦ φκ) ◦ φ∗κJ = λ.
Motivated by this equation, we take a new end-profile functionThen we arrive at the final definition of sectorial almost complex structures.
Definition 8.17 (λ-sectorial almost complex structures). Let (M,λ) be a Liouvillesector with boundary and corners. We fix
• a smoothing profile, i.e., a splitting data and the end-profile function sϕ,• the deformation function κ adapted to the given smoothing profile as before.
An ω-tame almost complex structure J on a Liouville sector is said to be λ-sectorial(with respect to the given smoothing profile and the choice of κ) if J satisfies thefollowing:

56 YONG-GEUN OH
(J1) [FF is J-complex] In a neighborhood of NbhdZ(∂M) of ∂M , we require
J(T ∗F ⊕ 0span{dµi,dνi}ki=1
)⊂ T ∗F ⊕ 0span{dµi,dνi}ki=1
, (8.19)
and J restricts to an almost complex structure of contact-type on F .(J2) [dsϕ,κ is J-dual to λ] In a neighborhood NbhdZ(∂M) ∪ ∂∞) of ∂M \
Nbhd(∂∞M), we have
−dsϕ,κ ◦ J = λ
for a cut-off function κ given in Definition 6.1.
We denote by Jsect(M,λ) the set of λ-sectorial almost complex structures.
The following abundance and contractibility theorem is obvious. Recall we havefixed a smoothing profile and in particular equip an end profile function sϕ,κ with(M,λ) on which the definition of λ-sectorial almost complex structures depend.
Theorem 8.18. Let (M,λ) be a Liouville sector. The set of sectorial almostcomplex structures is a nonempty and contractible infinite dimensional manifold.
Proof. Existence of sectorial J from that of κ-sectorial almost complex structuresince whenever J is κ-sectorial φ∗κJ is λ-sectorial. Certainly the choice of ωF -tameJF on F in (J1) is a contractible choice. Once Condition (J1) is imposed, the choiceto be made for the conditions (J2) on the relevant partial neighborhoods of
Nbhd(∂∞M) ∪NbhdZ(∂M)
is unique on the germs of neighborhoods of ∂∞M and ∂M . Finally extendingthe one defined on the neighborhood to everywhere to M is also contractible byGromov’s lemma on the ω-tame almost complex structures. �
9. Sectorial Floer packages
9.1. Sectorial Hamiltonians and nonnegative isotopies. Our effort of con-structing pseduo-convex pairs (sϕ,κ, J), a wiggled end-profile function sϕ,κ and itsadapted sectorial almost complex structures J pays off which makes simple thedefinitions of Hamiltonians and negative Hamiltonian isotopies that are amenableto the maximum principle.
Remark 9.1. [GPS20, 2.0.1] regards that it would be “an important technicaladvance” to enlarge the class of Hamiltonians defined near ∂M for which similarconfinement results for holomorphic curves can be proven.
Let (M,λ) be a Liouville sector equipped with a smoothing profile and a defor-mation λκ be given. We fix the associated wiggled end-profile function sϕ,κ.
Definition 9.2 (Sectorial Hamiltonians). Fix a Liouville sector M and a smoothingprofile (Condition 4.5) for M . Let sϕ,κ be the associated end-profile function. Wecall a Hamiltonian H : M → R a sectorial with respect to the smoothing profile if
H = ρ(sϕ,κ)
on a neighborhood Nbhd(∂∞M ∪ ∂M) for some function ρ : R→ R.
Example 9.3. If H = c sϕ,κ for some constant c on a neighborhood Nbhd(∂∞M ∪∂M), then H is sectorial.

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 57
It follows from Lemma 9.12 that we can take the neighborhood Nbhd(∂∞M ∪∂M) to be
Nbhds≥N (∂∞M) ∪Nbhdε(∂M).
for a sufficiently large N and small ε > 0.
Proposition 9.4. The space of sectorial (with respect to a fixed choice of sϕ,κ)Hamiltonians is nonempty and is contractible.
Proof. This is obvious. For example, the space of H is convex. �
On noncompact manifolds like Liouville sectors, the Floer continuation map(and hence Hamiltonian invariance) is available only in a preferred, ‘nonnegative’direction.
Notation 9.5. Let H = H(s, t, x) be a one-parameter family of (time-dependent)Hamiltonians Hs(t, x) := H(s, t, x) and consider the (s, t)-family of Hamiltoniandiffeomorphisms (s, t) 7→ φtHs .
The confinement theorem, Theorem 13.1, leads us to the following simple notionof sectorial nonnegative isotopies which is nothing but the natural definition ofnonnegative isotopies in the context of sectorial Hamiltonians.
Definition 9.6 (Sectorial nonnegative isotopy). We say a one-parameter family ofHamiltonian isotopies ψs = φ1
Hs is a sectorial nonnegative isotopy if it satisfies
(1) Each Hs is sectorial. In particular, on a neighborhood Nbhd(∂∞M ∪ ∂M), Hs = ρs(sϕ,κ) for some s-family ρs : R→ R.
(2) The family ρs satisfies∂ρs
∂s≥ 0. (9.1)
Remark 9.7. We would like to emphasize that we do not need to put any otherconditions on the behavior of Hamiltonians near ∂∞M∪∂M for the confinement re-sults. Compare this with the kind of Hamiltonians such as dissipative Hamiltoniansused in [GPS20].
We note that the condition (9.1) is equivalent to the standard definition of non-negative Hamiltonians
∂Hs
∂s≥ 0
applied to sectorial Hamiltonians Hs.
Example 9.8. Let H1, H2 be sectorial Hamiltonians. Then the linear interpolation
s 7→ Hs = (1− s)H1 + sH2
induces a sectorial nonnegative isotopy if H2 ≥ H1 on a neighborhood Nbhd(∂∞M∪∂M) of ∂∞M ∪ ∂M .
We relate this definition in the more common notion of nonnegative isotopies inthe literature.
Example 9.9. (1) In the literature on Floer theory for Liouville manifolds,the asymptotic behavior of the (autonomous) Hamiltonians is required tobe fixed; for example, by requiring H to be a constant multiple of thesymplectization radial coordinate r. For any isotopy induced by an s-independent family of sectorial Hamiltonians Hs satisfying Hs ≡ f(r), theisotopy induced by such a family is trivially a nonnegative isotopy.

58 YONG-GEUN OH
(2) In [GPS20, Section 4.8], some homotopy coherent diagrams are used todefine the homotopy limits of symplectic cohomology. In particular theauthors of [GPS20] used an explicit one-simplex {Hs} of Hamiltonians withcertain requirements such as Equation (4.69) and others in the same sectionof [GPS20]. When we consider such a homotopy diagram in our sectorialframework, the only thing we need to care about is a suitable continuationof background geometry of sectorial hypersurfaces and boundaries in theway that is amenable to our sectorial framework. For this purpose, onemay need to also consider the higher simplex version of the nonnegativityrequirement in the bundle setting. (See [OT20, OT19] for such a practice.)
9.2. Sectorial Lagrangians. We now identify the class of Lagrangians that defineobjects for a wrapped Fukaya category of Liouville sectors with corners. We omitdiscussion of other brane data such as spin structures since they are not differentfrom the usual description in the literature.
Definition 9.10 (Sectorial Lagrangians). Let (M,λ) be a Liouville sector with cor-ners. Denote ω = dλ. We say an exact, properly embedded Lagrangian submanifoldL of (M,ω) is sectorial if
• L ⊂M \ ∂M .• There exists a neighborhood of ∂∞M whose intersection with L is Z-
invariant.
Remark 9.11. The definition of sectorial Lagrangians depends only on the Liou-ville structure (M,λ) while the sectorial pair (J,H) depends on additional data likesϕ,κ.
Lemma 9.12. Assume that Nbhd(∂∞M) is a Z-invariant neighborhood. Fix sϕ,κ(and in particular, ϕ and κ). Then there exist a sufficiently small ε > 0 and asufficiently large N0 > 0 so that
s−1ϕ,κ([N0,∞)) ∩Nbhdε(∂M) ⊂ Nbhd(∂∞M)
Remark 9.13. This exhaustion property of end-profile functions of sϕ,κ makesthe sectorial Lagrangian, which is Z-invariant on a (unspecified) neighborhoodNbhd(∂∞M), amenable to an application of the strong maximum principle forthe function sϕ,κ on the region s−1
ϕ,κ([N0,∞)) for a sufficiently large N0 > 0. This iswhat enables us to make the definition of sectorial Lagrangian independent of thechoice of end-profile functions by unchanging the standard definition of Z-invariantLagrangians in the literature in our sectorial framework. See [Oh21] for a differentclass of Lagrangians that is amenable to the pseudoconvex pair (sϕ, J) for sectorialalmost complex structures, not λ-sectorial ones as in the present paper.

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 59
Part 3. Confinement theorems
In this part, with our sectorial Floer package, we establish the fundamental con-finement result for various Floer-type equations: There are two parts of them, onethe vertical uniform C0 estimates and the other the horizontal C0 estimates. Theformer prevents the relevant pseudoholomorphic curves from escaping to infinityand the latter from coming too close to the boundary ∂M from the interior of M .Because of the different natures of the geometries of ∂∞M and ∂M as mentionedbefore, the existing literature (e.g., [GPS20]) handle the two differently even forthe case without background Hamiltonian H turned on. When the Hamiltonianis turned on, they also restrict the class of Hamiltonians to those with somewhatcomplicated notion of dissipative Hamiltonians [Gro17] to achieve the relevant con-finement theorems for the Hamiltonian-perturbed Floer trajectory equations whichis one of the crucial element in the functorial studies of wrapped Fukaya categoriesand of symplectic cohomologies on Liouville sectors.
On the other hand, utilizing our sectorial framework, we will prove all theseconfinement results by applying the maximum principle to the κ-wiggled end-profilefunction sϕ,κ, and the strong maximum principle for the boundary value problemof Z-invariant-at-infinity Lagrangians. We establish the confinement results for thefollowing types of Floer equations on the Liouville sectors with corners:
• the structure maps of the associated A∞ category,• the Hamiltonian-perturbed Floer equation,• the Floer continuity equation under the nonnegative isotopies of Hamilto-
nians,• the closed-open (the open-closed) maps from the symplectic Floer cohomol-
ogy to the wrapped Fukaya category.
10. The curves we care about
We lay out the relevant Floer equations for which we establish maximum prin-ciples.
10.1. Structure maps of unwrapped Fukaya category. In the study of (un-wrapped) Fukaya category, we consider a disc D2 with a finite number of boundarymarked points zi ∈ ∂D2 equipped with strip-like coordinates (τ, t) (or on the sphereS2) with a finite number of marked points. We denote by zizi+1 the arc-segmentbetween zi and zi+1, and τ =∞i the infinity in the strip-like coordinates at zi.
Let L0, . . . , Lk be a (k + 1)-tuple of Lagrangian submanifolds which are Z-invariant near infinity. We denote
Σ = D2 \ {z0, . . . , zk}
and equip Σ with strip-like coordinates (τ, t) with ±τ ∈ [0,∞) and t ∈ [0, 1] neareach zi.
Then for a given collection of intersection points pi ∈ Li ∩ Li+1 for i = 0, . . . , k,we wish to study maps u : Σ→M satisfying the Cauchy-Riemann equation
∂Ju = 0
u(zizi+1) ⊂ Li i = 0, . . . k
u(∞i, t) = pi, i = 0, . . . k.
(10.1)

60 YONG-GEUN OH
10.2. Symplectic cohomology and its continuation map. Let H be an (au-tonomous) sectorial Hamiltonian and `0, `1 be a pair of periodic orbits of H. Weconsider a map u : R× S1 →M satisfying
J(du−XH(u)⊗ dt) = (du−XH(u)⊗ dt) ◦ j (10.2)
which is equivalent to saying that the TM -valued one-form du − XH(u) ⊗ dt is(j, J)-holomorphic; i.e., that u satisfies
(du−XH(u)⊗ dt)(0,1)J = 0. (10.3)
By evaluating this equation against ∂∂τ , we get the standard Floer equation
∂u
dτ+ J
(∂u
dt−XH(u)
)= 0 (10.4)
back. Then we put the asymptotic condition
u(−∞, t) = `0(t), u(∞, t) = `1(t). (10.5)
For the continuation map, one commonly considers one-parameter family of sec-torial Hamiltonians {Hs}s∈[0,1] and an elongation function χ : R → [0, 1] withχ(τ) ≡ 0 for τ ≤ 1 and χ(τ) ≡ 0 for τ ≥ 1 and consider the non-autonomousanalog to (10.2),
∂u
dτ+ J
(∂u
dt−XHχ(u)
)= 0 (10.6)
where Hχ : R ×M → R is the χ-elongated one-parameter family of {Hs} definedby
Hχ(τ, x) := Hχ(τ)(x).
10.3. Closed-open maps and open-closed maps. These are the maps whichconnect the symplectic cohomology and the Hochschild (co)homology of the Fukayacategory of the underlying symplectic manifold in general.
The following is a variation of the similar moduli spaces that have appeared in[FOOO19, Definition 18.21] (for ` = 1) in the closed context (See also [Alb05].)
Definition 10.1. Consider a collection ~H = {Hj}j=1,...,` and let Per(Hj) be theset of periodic orbits. We fix for all j `j ∈ Per(Hj). We consider the moduli spaceof all pairs (
u, (D2; z+1 , . . . , z
+` ; z0, . . . , zk)
)satisfying the following:
(1) z+1 , . . . , z
+` are points in IntD2 which are mutually distinct.
(2) z0, . . . , zk are points on the boundary ∂D2 which are ordered counterclock-wise on S1 = ∂D2 with respect to the boundary orientation coming fromD2.
(3) Write Σ = D2 \ ({z+j } ∪ {zi}) and equip Σ with cylindrical coordinates
ε+j : (−∞, 0]× S1 → Σ
near z+j and strip-like coordinates
εi : (−∞, 0]× [0, 1]
for i = 1, . . . , k and
ε0 : [0,∞)× [0, 1]→ Σ

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 61
near z0.(4) The map u : Σ→M is a smooth map such that u(zizi+1) ⊂ Li.(5) The map u satisfies the equation
(du−XK(u)⊗ γ)(0,1)J = 0 (10.7)
for some subclosed one-form γ on Σ, where K = K(z, x) : Σ ×M → R isthe domain-dependent Hamiltonian such that
H(εj(τ, t), x) = Hj(t, x) (10.8)
on each strip-like end εj : [0,∞)× [0, 1]→ Σ of Σ.(6) We put the asymptotic condition
u(zi) = pi ∈ Li ∩ Li+1, i = 0, . . . k (10.9)
for zi ∈ ∂D2.
The open-closed map is defined similarly by considering the above maps in thereverse direction of τ .
10.4. Quantitative measurements for the C0-estimates. In the study of eachof the above Floer moduli spaces, one needs to establish C0-estimates as the firststep towards the study of analytic estimates and compactification of the modulispaces.
We now provide the quantitative measurements that enter in our C0-estimatesuniformly for all the above moduli spaces.
Definition 10.2. Write ~L = {L0, . . . , Lk} and ~Hε = (H0, . . . ,Hk).
(1) Define
Per( ~Hε) :=⋃i
Per(Hi)
and
htPer(~L, ~Hε) := maxi
(max{s(`(t)) | ` ∈ X(Li, Li+1;Hi)}) . (10.10)
We call htPer(~L, ~H) the ~H-orbit height of ~L.(2) Let a symplectization radial function s be given. Define the Z-invariance
support of L, denoted by suppZ(L),
suppZ(L) := M \⋃N>0
{x ∈ L ∩Nbhd{s≥N}(∂∞M) | Z(x) is tangent to L}
and its Z-invariance level of L by
levelZ(L) := maxx∈suppZ(L)
s(x).
Then we call
levelZ(~L) :=k
maxi=0
levelZ(Li).
the Z-invariance level of the collection ~L.(3) For each Lagrangian L with L ∩ ∂M = ∅, we denote the distance between
L and ∂M by
d(L; ∂M) = inf{d(x, y) | x ∈ L, y ∈ ∂M}
and d(~L; ∂M) = min{d(L; ∂M) | L ∈ ~L} (with respect to any given metricg of bounded geometry, e.g., an ω-tame metric g).

62 YONG-GEUN OH
(4) The quantities of the width wd(ϕ) and its height ht(ϕ) of the functionϕ ∈ Convsm(Rk+), which is fixed for each sectorial corner, will enter themeasurements via the associated end-profile function sk+1,ϕ.
Remark 10.3. By definition, if L (resp. ~L) is Z-invariant at infinity, levelZ(L) <
∞ (resp. levelZ(~L) <∞).
11. Confinement for the structure maps of unwrapped Fukayacategories
We work in the framework of Section 10.1.
Definition 11.1 (Intersection height). Let a symplectization radial function s be
given Let ~L = {L0, . . . , Lk} and define Define
ht(~L) := maxi
(max{s(pi) | p ∈ Li ∩ Li+1}) . (11.1)
We call ht(~L) the intersection height of ~L.
We haveht(~L) ≤ levelZ(~L)
when Li’s are pairwise disjoint above the Z-invariance level.With this definition, we establish the following C0-estimate from the J-convexity
of sϕ,κ and the maximum principle and the strong maximum principle.
Remark 11.2. For the usual C0-estimates via the maximum principle in thisbordered case (see, e.g., [EHS95]) we recall the importance of the role of J beingof contact-type, (or more precisely J satisfying the equation −ds ◦ J = λ) and theZ-invariance of the Lagrangians at infinity.
Theorem 11.3. Let J be a sectorial almost complex structure of the Liouvillesectors with corners M . Let u be a solution to (10.1) as in 10.1. Then the followinghold:
(1) (Horizontal C0 estimates) There exists some ε = ε(~L) > 0 independent ofu’s such that
Imageu ⊂M \Nbhdε(∂M).
(2) (Vertical C0 estimates) There exists N0 = N0(~L) > 0 independent of usuch that
Imageu ⊂M \Nbhds≤N0(∂∞M).
Proof. First since all Lagrangian submanifolds Li’s are Z-linear at infinity, all Li’s
are contained in the interior {R > ε1} for ε1 = d(~L, ∂M).Then by definition of sectorial almost complex structure J , J is associated to a
splitting data and the wiggled end-profile function sϕ,κ. Since a neighborhood of∂∞M ∪ ∂M is exhausted by the family of hypersurfaces
(sϕ,κ)−1(r)
for r ≥ 0 (see Lemma 4.3), it is enough to prove
Imageu ⊂ (sϕ,κ)−1((−∞, r]) (11.2)
for some r > 0, which will establish both vertical and horizontal bounds simulta-neously: Note that the inequality
sϕ,κ ≤ r0

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 63
implies both s ≤ N + r0 and
maxi=1,...,n
| logRi| ≤ r0.
We may take the vertical upper bound to be
N0(~L) := max{ht(~L), levelZ(L), N + r0}
and the horizontal lower bound to be
ε(~L) := mini=1,...n
Ri ≥ e−r0 .
We first recall that du is J-holomorphic and −d(dsϕ,κ ◦ J) = dλ from Definition8.17. By definition of [dλM ](J;Uε2 ) (Definition 7.2) and since d (sϕ,κ ◦ u) ◦ j =dsϕ,κ ◦ J ◦ du, we have
− d (d (sϕ,κ ◦ u) ◦ j) ≥ C
2|du|2J ωΣ (11.3)
with
C = [−dsϕ,κ ◦ J ]J;Uε2= [dλ](J;Uε2 ) > 0.
In particular, the function sϕ,κ ◦ u is a subharmonic function and cannot carry aninterior maximum on R× [0, 1] by the maximum principle.
Next we will show by the strong maximum principle that u cannot have a bound-ary maximum in a neighborhood of ∂∞M ∪ ∂M either. This will then enable us toobtain a C0 bound r0 > 0 such that
Imageu ⊂ {sϕ,κ ≤ r0}
for any finite energy solution u with fixed asymptotics (10.9).Now suppose to the contrary that sϕ,κ ◦ u has a boundary local maximum point
z′ ∈ ∂D2 \ {z0, . . . , zk}. By the strong maximum principle, we must have
0 <∂
∂ν(sϕ,κ ◦ u) = dsϕ,κ
(∂u
∂ν
)(11.4)
for the outward unit normal ∂∂ν of ∂Σ, unless sϕ,κ is a constant function in which
case there is nothing to prove. Let (r, θ) be an isothermal coordinate of a neighbor-hood of z0 ∈ ∂Σ in (Σ, j) adapted to ∂Σ, i.e., such that ∂
∂θ is tangent to ∂Σ and
|dz|2 = (dr)2 + (dθ)2 for the complex coordinate z = r + iθ and
∂
∂ν=
∂
∂r(11.5)
along the boundary of Σ. Since u is J-holomorphic, we also have
∂u
∂r+ J
∂u
∂θ= 0.
Therefore combining this with the duality requirement
−dsϕ,κ ◦ J = λ,
we derive
dsϕ,κ
(∂u
∂ν
)= dsϕ,κ
(−J ∂u
∂θ
)= λ
(∂u
∂θ
).

64 YONG-GEUN OH
By the Z-invariance of L and the boundary condition u(∂Σ) ⊂ L, both Z(u(z0))and ∂u
∂θ (z0) are contained in Tu(z0)L, which is a dλ-Lagrangian subspace. Thereforewe have
0 = dλ
(Z,∂u
∂θ
)= λ
(∂u
∂θ
)where the second equality follows from the definition of Liouville vector field Z ofλ.
This is a contradiction to (11.4) and hence the function sϕ ◦ u cannot have aboundary maximum either. This finishes the proof. �
Remark 11.4. The same confinement result holds for the Floer’s continuationequation for the moving Lagrangian boundary condition of nonnegative isotopies,which we refer readers to the most updated versions of [OT20] (for the unwrappedcase), and [OT19] (for the wrapped case) for the details.
12. Confinement theorems for symplectic cohomology
We work in the setting of Section 10.2. We consider two cases separately, onefor the structure map for the symplectic cohomology (i.e., for the autonomousHamiltonian) and the other for the case of Floer continuation map (i.e., for thenonautonomous Hamiltonian).
In this section, we consider a (time-dependent) sectorial Hamiltonian H =H(t, x).
Theorem 12.1. Let (M,λ) be a Liouville sector. Let (J,H) be sectorial. Supposeu satisfies the equation (10.3) and Imageu ∩ ∂M = ∅. Then the following hold:
(1) (Horizontal C0 estimates) There exists some ε = ε(~L) > 0 independent ofu’s such that
Imageu ⊂M \Nbhdε(∂M).
(2) (Vertical C0 estimates) There exists N0 = N0(~L,H) > 0 independent ofu’s such that
Imageu ⊂M \Nbhds≤N0(∂∞M).
The rest of this subsection will be occupied by the proof of this theorem. Againit is enough to prove
Imageu ⊂ (sϕ,κ)−1((−∞, r]) (12.1)
for some r > 0.
Proposition 12.2. Let J be a λ-sectorial almost complex structure, and H =H(t, x) be any sectorial Hamiltonian. Then for any solution u of (10.2), we have
∆(sϕ,κ ◦ u) =
∣∣∣∣∂u∂τ −XH(u)
∣∣∣∣2J
− ρ′(sϕ,κ ◦ u)∂
∂τ(sϕ,κ ◦ u). (12.2)
on a neighborhood Nbhd(∂∞M ∪ ∂M).
Proof. We restrict ourselves to a neighborhood contained in
NbhdI≥N (∂∞M) ∩Nbhd2ε0(∂M)
of the ceiling of a sectorial corner Cδ. Then the function f : F×CRe≥0 → R satisfiesthe properties given in Proposition 2.3. We also focus on the neighborhood of afixed sectorial corner where the end-profile function sϕ,κ is defined.

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 65
By taking the differential of −u∗(dsϕ,κ◦J) = u∗λ for the λ-sectorial J , we obtain
−u∗d(dsϕ,κ ◦ J)) = u∗dλ.
Using this and the equation (10.4), we now evaluate u∗dλ against the tuple ( ∂∂τ ,
∂∂t )
and derive
u∗dλ = dλ
(∂u
∂τ,∂u
∂t
)= dλ
(∂u
∂τ,∂u
∂t−XH(u)
)+ dλ
(∂u
∂τ,XH(u)
)=
∣∣∣∣∂u∂τ −XH(u)
∣∣∣∣2J
− ρ′(sϕ,κ ◦ u)∂
∂τ(sϕ,κ ◦ u).
For the last equality, we have also used H = ρ(sϕ,κ ◦ u) and calculations
dλ
(∂u
∂τ,XH(u)
)= −dMH(u)
(∂u
∂τ
)= − ∂
∂τ(H(t, u)) +
(∂Ht
∂τ
)(u)
= − ∂
∂τ(H(t, u)) = − ∂
∂τ(ρ(sϕ,κ ◦ u))
= −ρ′(sϕ,κ ◦ u)∂
∂τ(sϕ,κ ◦ u).
This finishes the proof. �
Proof of Theorem 12.1. An immediate corollary of Proposition 12.2 and (10.2) isthat we can apply the maximum (as well as the strong maximum) principle toconclude that sϕ,κ ◦u cannot carry any local maximum point. (See Appendix C forsome more details for how the strong maximum principle applies.)
In particular, we have a uniform C0 bound r0 > 0 such that
Imageu ⊂ {sϕ,κ ≤ r0}for any finite energy solution u. �
Remark 12.3. Theorem 12.1 implies that the moduli space of J-holomorphiccurves v : Σ → M is a disjoint union of those curves that touch ∂M , and thosecurves that are bounded away from a neighborhood of ∂M . In particular, if onemember in a continuous family of J-holomorphic curves is bounded away from ∂M ,so are all other members of that family. In the Lagrangian Floer theory of Liouvillesectors, we will always consider J-holomorphic curves whose images are containedin Int(M) = M \ ∂M . Theorem 12.1 ensures Gromov compactness for this class ofcurves.
13. Confinement for the continuation under nonnegative Liouvilleisotopies
In this section, we consider a one-parameter family of sectorial HamiltoniansHs = Hs(t, x) and consider Floer continuation maps for the symplectic cohomology.The Floer continuation equation is given by
∂u
dτ+ J
(∂u
dt−X
Hχ(τ)i
(u)
)= 0 (13.1)

66 YONG-GEUN OH
for an elongation function χ : R→ S1 with χ(τ) = 0 such that
χ(τ) =
{1, at τ = −∞0 at τ =∞
χ′ ≤ 0 (13.2)
Theorem 13.1. Let J and Hs = Hs(t, x) be a sectorial nonnegative isotopy andconsider the Floer continuation equation (13.1) for a map u : R×S1 →M with finitegeometric energy and Imageu ∩ ∂M = ∅. Then for each given periodic orbits z±of Hamiltonians H± = H±(t, x) respectively with Image z± ∩ ∂M = ∅, there existssome r0 > 0 such that any solution for u with finite geometric energy satisfies
Imageu ⊂ (sϕ,κ)−1((−∞, r0]). (13.3)
Proof. As before, we compute ∆(sϕ,κ ◦ u) dτ ∧ dt∆(sϕ,κ ◦ u) dτ ∧ dt = −d(d(sϕ,κ ◦ u) ◦ j) = u∗dλ. (13.4)
Then we have
u∗dλ =
(∣∣∣∣∂udτ −XHχ(u)
∣∣∣∣2J
− ∂
∂τ(ρχ(sϕ,κ ◦ u))
)dτ ∧ dt.
Combining the two, we have derived
∆(sϕ,κ ◦ u) =
∣∣∣∣∂udτ −XHχ(u)
∣∣∣∣2J
− ∂
∂τ(ρχ(sϕ,κ ◦ u))
similarly for (12.2), except ρ replaced by ρχ which now varies depending on thevariable τ .
We rewrite
∂
∂τ(ρχ(sϕ,κ ◦ u)) = (ρχ(τ))′(sϕ,κ ◦ u)
∂
∂τ(sϕ,κ ◦ u) + χ′(τ)(ρχ(τ))′(sϕ,κ ◦ u).
Since χ′ ≤ 0 and (ρs)′ > 0, we have derived
− ∂
∂τ(ρχ(sϕ,κ ◦ u)) ≥ −(ρχ(τ))′(sϕ,κ ◦ u)
∂
∂τ(sϕ,κ ◦ u).
In particular, we have derived
∆(sϕ,κ ◦ u) ≥ −(ρχ(τ))′(sϕ,κ ◦ u)∂
∂τ(sϕ,κ ◦ u). (13.5)
Therefore we can apply the (interior) maximum principle. We postpone till Appen-dix C to explain how this differential inequality together with the Z-invariance ofthe given Lagrangian boundary condition enables us to apply the strong maximumprinciple too.
This finishes the proof. �
The above theorem can be rephrased as that the Floer continuation equationis amenable to the maximum principle for the sectorial nonnegative homotopies{Hs}.
Remark 13.2. It is worthwhile to highlight the pair of conditions in Definition 9.6enables us to establish all the necessary C0-estimates in our sectorial framework bythe maximum principle, using only the standard geometric calculations that havebeen used in the Hamiltonian geometry and in the analysis of pseudoholomorphic

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 67
curves. All of the proofs of the C0-estimates in the literature involve some type ofanalytic comparison estimates between the growth rate of the Hamiltonian H, thesymplectization radial coordinates s and other derivative estimates of the almostcomplex structures J . (See [GPS20, Definitiion 4.5] and [Gan13, Appendix], forexample, and the relevant references therein for the proofs of the C0-estimates.) Onthe other hand, under the aforementioned pair of the conditions, our C0-estimatesin this sectorial framework are closely tied to the Hamiltonian geometry and arederived from some tensorial calculations and the sign considerations without doingany estimates for the application of the maximum principle to sϕ,κ.
14. Confinement for closed-open and open-closed maps
As described in Subsection 10.3, the relevant Floer equation for the closed-openand open-closed maps is given as follows: We will focus on the case when there isonly one interior puncture. In this case, we can identify D2 \ z+
0 with the semi-cylinder
R× (−∞, 0].
Under this identification, let K : (−∞, 0] × M → R be the given τ -dependentsectorial Hamiltonians {Kτ}.
K(τ, x) =
{H(x) for τ > R with R sufficiently large
0 for 0 ≤ τ ≤ δ for some 0 < δ < R.(14.1)
We consider the equation
∂u
∂τ+ J
(∂u
∂t−XK(u)
)= 0. (14.2)
The following is the confinement result for the solutions for (14.2).
Theorem 14.1. Let K = K(τ, t) be a τ -dependent (autonomous) sectorial Hamil-tonians Kτ = K(τ, x) such that
K(−∞, x) = χ(τ)H(x)
with an elongation function χ : (−∞, 0]→ [0, 1] such that
χ(τ) =
{1 near τ = −∞0 near τ = 0
χ′(τ) ≤ 0.
Then there exists some r0 > 0 such that any solution for u with finite geometricenergy satisfies
Imageu ⊂ (sϕ,κ)−1((−∞, r0]). (14.3)
Proof. By the same calculation as in the proof of Theorem 13.1, we derive thefollowing differential inequality
∆(sϕ,κ ◦ u) ≥ −χ′(τ)∂
∂τ(sϕ,κ ◦ u).
Then we can apply the maximum and the strong maximum principle respectivelyagain as in Appendix C and finish the proof. �

68 YONG-GEUN OH
Remark 14.2. The case of more than one interior punctures do not carry theglobal coordinate (τ, t) as in the above case of one interior puncture and requiresthe usage of general TM -valued one form P (u) and involves the general equation
(du− P (u))(0,1)J = 0
in the setting of Hamiltonian fibration as in [OT20]. We will elaborate this else-where.
15. Construction of covariant inclusion functor
In this section, we explain how the necessary confinement results entering inthe construction of the covariantly functorial morphisms defined in [GPS20] canbe established utilizing the present sectorial Floer package. We will focus on thegeometric part of the construction since the algebraic part of the construction isalmost the same as that of [GPS20, Section 3.4-3.6].
Let X ↪→ X ′ be an inclusion of Liouville sectors in the sense of [GPS20]. Wewill only consider the case
X ∩ ∂X ′ = ∅for the simplicity of exposition which can be easily accomodate the case with X ∩∂X ′ 6= ∅. In particular, there is some neighborhood Nbhd(∂X ′) of ∂X ′ such that
X ∩Nbhd(∂X ′) = ∅
where
Nbhd(∂X ′)
is a neighborhood of ∂X ′ that is Z-invariant at infinity We would like to mentionthat this choice of neighborhood depends only on the given pair X ⊂ X ′ withX ∩ ∂X ′ = ∅.
With this geometric preparation, our construction of the covariantly functorialinclusion functor follows the following steps. We let ε0 be the same constant thatis used before.
15.1. Step 1: Choice of smoothing profiles. We take smoothing profiles andother Floer data of X and X ′ to define the wrapped Fukaya categories
Fuk(X), Fuk(X ′)
respectively.We may take the smoothing profiles and associated end-profile functions of X
and X ′ as follows by suitably decreasing ε0 > 0 and ε > 0 if necessary.We first have a splitting data and the decomposition
X = F × C[0,4ε0]
⋃X−4ε0
where X−4ε0 := X \ F × C[0,4ε0], so that
X ∩Nbhd4ε0(∂X ′) = ∅
and Nbhd4ε0(∂X ′) ⊂ Nbhd(∂X ′) for the neighborhood Nbhd(∂X ′) chosen in thebeginning.
We take a contact type hypersurface S′0 of X ′ so that
S′0 t ∂X

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 69
and the associated radial function s will also have the form
s = s(I)
on F ×C[0,2ε0]
⋃X−4ε0 ⊂ X. Recall by definition that s also has the form s(I ′) on
Nbhd 3ε02
(∂X ′). Then we define the end-profile functions of sXϕ,κ and sX′
ϕ,κ simulta-
neously using this radial function s defined on X ′.
15.2. Step 2: Choice of generating Lagrangian branes. We take a collectionof sectorial Lagrangians in X indexed by a countable set I containing all isotopyclasses of Lagrangians. (This collection corresponds to the indexing set I used in[GPS20]. Since we use the letter I for the Hamiltonian I already, we avoid usingthe same letter by changing I to the calligraphic I here.)
The following definition is given in [GPS20, Section 3.4].
Definition 15.1 (Positive wrapping category,[GPS20]). The positive wrapping cat-egory denoted by
(L −)+
is defined as follows:
• [Objects] isotopies of exact Lagrangians φ : L Lw,• [Morphisms] The morphisms
(φ : L Lw)→ (φ′ : L Lw′)
are the homotopy classes of positive isotopies of exact Lagrangians ψ :Lw → Lw
′such that φ#ψ = φ′.
Motivated by this, we also consider the following.
Definition 15.2. We say two sectorial Lagrangians are in the same isotopy classif there is a positive isotopy from one to the other.
By applying a suitable Hamiltonian isotopy, we may assume that all elements ofI are contained in
X \NbhdZ√ε1(∂X)
for some sufficiently small ε1 > 0.
Remark 15.3. (1) For example, we may use the Hamiltonian isotopy gener-ated by −XI where I is the function that naturally appears when a splittingdata is chosen later. But we prefer to make this operation independent ofsuch a choice.
(2) Here one should regard ε1 as the ε that appears in the construction ofconvex smoothing functions ϕ.
Then we consider the poset
O = Z≥0 × I
as in [GPS20, Section 3.6], except the changing the letter I to I as mentioned above.

70 YONG-GEUN OH
15.3. Step 3: Defining a λ-sectorial almost complex structure. We firsttake an associated λ-sectorial almost complex structure on X \ Nbhd[2ε0,∞)(∂X)that satisfies the defining properties λ-sectorial almost complex structures thereonby regarding
X \Nbhd[2ε0,∞)(∂X) =: X2ε0
itself as a Liouville sector with the decomposition
X2ε0 \X4ε0 = F × C[4ε0,∞).
Then we extend this arbitrarily to a λ-sectorial J for the whole X ′. We take
2ε0 <√ε1.
15.4. Step 4: Enlarging the generating collection to X ′. Next we considerthe corresponding data for the sector X ′. We similarly choose I′ so that all elementsthereof are contained both in
X ′ \NbhdZ√ε1(∂X) ⊂ X ′ \Nbhd2ε0(∂X ′).
We setO′ = Z≥0 × (I′ ∪ O).
15.5. Step 5: Study of pseudoholomorphic curves on X ′. Now using theabove chosen Floer data (J,H) on X ′, we consider the J-holomorphic equations on
the marked discs Σ
Σ = D2 \ {z0, . . . , zm}, z0, . . . , zm ∈ ∂D2
onX ′ with the corresponding boundary conditions with the Lagrangians L0, · · · , Lmfrom I′. Then thanks to the properties of the sectorial Floer package
(J,H), {L0, · · · , Lm}established in the present paper, the maximum (and strong maximum principle)give rise to the covariantly functorial inclusion functor in the same was as [GPS20]does.
Appendix A. Discussion
Here we would like to attract attention of readers to the implication of oursectorial Floer package to the geometric framework needed to perform the analy-sis of pseudoholomorphic curves on noncompact symplectic manifolds which havebeen commonly adopted in relation to the study of wrapped Fukaya category onthe Liouville manifolds (or the sectors). We recall that on noncompact manifoldsetting, the C0 estimate must precede for the study of compactness properties ofpseudoholomorphic curves.
A.1. Monotonicity argument relies on the energy estimates. A Liouvilleequivalence between two Liouville manifolds (M1, λ1) and (M2, λ2) is a diffeomor-phism φ : M1 → M2 satisfying φ∗λ = λ + df for a function f : M1 → R withcompact support. (See [AS10].) This support condition enters the analysis of pseu-doholomorphic curves through the study of relevant action estimates which in turnis used to get the energy bound. When the maximum principle does not apply,using the monotonicity is a tool to establish for the autonomous (that is time-independent) Floer equation. Similarly for the study of Floer homology theoryof exact Lagrangian submanifolds as in the study of wrapped Fukaya category, a

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 71
choice of Liouville primitive g of i∗λ = dg crucially enters first to equip the relevantFloer trajectory equation with a gradient structure. (See [Oh97], [KO01].) This isthe reason why the pair (L, g), not just L itself, has been a part of essential branedata for the Floer theory of exact Lagrangian submanifolds (see [Sei03]). But thisapproach requires the uniform energy estimate to proceed and hence comes therequirement of some fixed behavior of the primitives f and g at infinity. This iswhat has been adopted in the existing literature and also in [GPS20]. For the caseof noncompact Lagrangian submanifolds such as the case of cylindrical Lagrangiansin Liouville manifolds researchers have been keen to the support behavior of theprimitive g so that the primitive remains to be compactly supported after the var-ious operations such as taking the product of two Lagrangian branes (L1, g1) and(L2, g2) in the product of Liouville manifolds M1×M2. (See [GPS18] for example.)Obviously the product operation destroys this compact support property.
A.2. Maximum principle does not rely on the energy estimates. Of course,the aforementioned compact support requirement for the above functions f or for gdo not enter the Hamiltonian flow equation or the Floer equation themselves otherthan through the action estimates and hence through the energy estimates. Whilethe presence of the function g is fundamental for the Floer theory to start, a choicethereof does not affect the analysis of pseudoholomorphic curves for the compactLagrangian submanifolds, unless one is interested in a quantitative aspect of theFloer theory.
When the maximum principle applies, it is the most efficient way of establish-ing the C0 estimates because it first requires only the local property of the secondderivative estimates and are independent of the energy estimates once the asymp-totic limits are prescribed. More importantly it does not depend on the choiceof primitives and even applies equally well to non-exact (cylindrical) Lagrangiansubmanifolds. Since we use the maximum principle to establish the C0 estimateswhich does not depend on the choice of primitives, we need no longer require thiscompact support condition for the primitives. (See [Oh97] for an early advocationof the asymptotically constant framework.) This enables us to widen the class ofHamiltonians in the literature e.g., those used in [Gro17], [GPS20] to that of thesimply defined sectorial ones we introduce in the present paper once the λ-sectorialalmost complex structure is paired with them in the study of Floer equations. Theconformally Liouville diffeomorphisms that we used to deform the Liouville format infinity in Section 6 implicitly plays a crucial role along the way in the processof the construction of λ-sectorial almost complex structures. We safely put theeffect of this haphazard operation of considering such a diffeomorphism into that ofJ , although such an operation should be avoided in the study of wrapped Fukayacategory of Liouville sectors since it changes the given Liouville structure. Thiskind of practice is not alien in the study of Floer theory. In the framework basedon the monotonicity argument based on the energy estimate as in [GPS20], suchan operation should be avoided and need much more care when it is used.
Appendix B. Giroux’s ideal completion and the asymptoticallylinear framework
Now we explain an elegant way of packaging all the definitions of sectorial objectsutilizing Giroux’s notion of ideal Liouville domain which we generalize to the case

72 YONG-GEUN OH
of Liouville sector, provided we employ the analytical framework of pseudoholo-morphic curves on open symplectic manifolds developed by Bao in [Bao15, Bao16](see also [OW18]) which extends the existing cylindrical-at-infinity (CI) analyticalframework to that of more flexible asymptotically-cylindrical-at-infinity (ACI). Thepoint of view of Giroux’s ideal completion as the completion of the Liouville domainmakes natural to extend the CI category to the ACI category.
B.1. Giroux’ notion of ideal Liouville domain. We recall Giroux’s notion ofthe ideal completion of the Liouville domain (M0, λ0). We closely follow Giroux’exposition, in particular his notations in this section for the comparison purpose.
Definition B.1 (Ideal Liouville Domains [Gir17]). An ideal Liouville domain (F, ω)is a domain F endowed with an ideal Liouville structure ω. The ideal Liouvillestructure is an exact symplectic form on IntF admitting a primitive λ such that:For some (and then any) function u : F → R≥0 with regular level set ∂F = {u = 0},the product uλ extends to a smooth one-form on F which induces a contact formon ∂F .
We alert readers that the F appearing in this definition has nothing to do withF in the main text.
We first recall the construction of ideal completion from [Gir17, Example 9]. Letu : M0 → R≥0 be a function with the following properties:
• u admits C = ∂M0 as its regular level set {u = 0},• Xλ[log u] < 1 at every point in IntM0.
Then the form ω0 := d(λ0/u) defines a symplectic form on IntM0. The pair(M0, ω0) is an ideal Liouville domain which Giroux calls the ideal completion ofthe Liouville domain (M0, λ0).
We write
• Aut(M0, ω0) for the group of diffeomorphisms of M0 preserving ω0 onIntM0,• Aut∂(M0, ω0) ⊂ Aut(M0, ω0) for the subgroup of diffeomorphisms fixingC = ∂M0 pointwise, and• Aut(C, ξ) for the group of contactomorphisms of (C, ξ).
The following propositions are proved by Giroux.
Proposition B.2 (Proposition 7 [Gir17]). The restriction homomorphism
Aut(M0, ω0)→ Aut(C, ξ)
is a Serre fibration, with associated long exact sequence of homotopy groups
. . . πk(Aut∂(M0, ω0))→ πk(Aut(M0, ω0))→→ πk(Aut(C, ξ))→ πk−1(Aut∂(M0, ω0))→ . . . .
Let u : M0 → R≥0 be a defining function of C = ∂M0 as above.
Lemma B.3 (Proposition 3 [Gir17]). Let β[ be the vector field dual to the formβ = λ/u defined by β[cω0 = β. Then it is complete on IntM0 and defines a uniqueembedding ιβ : SC → M0 such that ιβ |C = id and ι∗ββ = λξ and its image is an
open collar neighborhood U of C = ∂M0.

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 73
Therefore ιβ provides a natural decomposition
IntM0 = (M0 \ U) ∪ U
such that ιβ : (SC, dλξ)→ (F, dβ) is a Liouville embedding.In regard to the Liouville isomorphisms, an upshot of Giroux’s ideal completion
is that the group Aut(M0, ω0) corresponds to the group of asymptotically-linear-at-infinity symplectomorphisms, i.e., those converging to linear ones exponentiallyfast at infinity. (See [Bao15] for the relevant definition of asymptotic linearity or as-ymptotic cylindricality.) This is an amplification of the standard group of symplec-tomorphisms linear-at-infinity. The Giroux’ framework of ideal Liouville domainsallows one to elegantly package this asymptotically linear framework. Thereforeit is aesthetically very satisfying to see that Bao’s asymptotically-linear-at-infinityframework enables one to make all the definitions of sectorial objects very simple.Explanation of this is now in order.
B.2. ACI-sectorial Floer package in Liouville sectors. The definition of idealsectorial domains is verbatim the same as that of [Gir17] for the case of Liouvilledomains (without corners) (under the assumption that the Liouville vector field istangent to near infinity), and then a Liouville sector is nothing but M \ ∂∞M , anideal completion of sectorial domain.
In this ACI point of view, it is very simple to give the definitions of sectorialalmost complex structures, Hamiltonians and Lagrangians.
We borrow the discussion from [Gir17, Example 9] here: Let (W,λ) be a sectorialdomain and u : W → R≥0 be a defining function of ∂∞W with the properties laidout as above. Then (F, ω[u]) with ω[u] := d(λ/u) defines an ideal Liouville domainin the sense of [Gir17, Definition 1].
Definition B.4 (Ceiling-profile function). Let (W,λ) be a sectorial domain. Wecall a function u above the ceiling-profile function the (asymptotically-linear) openLiouville sector (M,ω) if
M = W \ ∂∞W, ω = d(λ/u).
Definition B.5 (ACI-sectorial Floer package). Let (W,λ) be a sectorial domainand (M,ω) be an open Liouville sector with the ceiling-profile function u, i.e.,ω = d(λ/u).
(1) [ACI-sectorial Lagrangian] We call a Lagrangian submanifold L ⊂ (M,ω)a ACI-sectorial if there exists a smooth Lagrangian submanifold L in Wsuch that• L intersects ∂∞W transversely,• L ∩ ∂W = ∅.• L is β[-invariant near ∂∞W .
(2) [ACI-sectorial almost complex structure] An ω-tame almost complex struc-ture J on M is called ACI-sectorial, if J makes the union ∂∞W ∪ ∂W Jpseudoconvex so that its defining exhaustion function is Liouville pseudo-convex.
(3) [ACI-sectorial Hamiltonian] A function H : M → R is called ACI-sectorialif it smoothly extends to W and satisfies similar conditions as in Definition9.2 in terms of the J-convex exhaustion function ψ.

74 YONG-GEUN OH
Remark B.6. When α < 1 with I satisfying Z[log I] = α, the function I − Nfor sufficiently large N > 0 can play the role of the profile function u above on aneighborhood of the boundary of ∂M , provided the level set I−1(N) is compact inthe neighborhood. So if we want to take the ACI point of view, the case α = 1 isspecial in that the function I does not belong to the set of ceiling-profile function:the two form d(λ/I) has nontrivial kernel which is nothing but the span of theLiouville vector field. Varying α will be also important, when the family story asin the bundle of Liouville sectors considered in [OT20] and it is good to have theflexibility of choosing the eccentricity of α in the story, and also raises a questionwhat would be the implication when the family cannot avoid including the extremeeccentricity α = 1.
Appendix C. Strong maximum principle and Z-invariance ofLagrangians
In this section, we provide the details on how we apply the maximum (and strongmaximum) principle to the circumstances of Theorems 13.1 and 14.1.
In both cases, we have derived a differential inequality of the following type.{∆(sϕ,κ ◦ u) ≥ c(τ, t) ∂
∂τ (sϕ,κ ◦ u)
u(τ, i) ⊂ Li, i = 0, 1(C.1)
for the function
c(τ, t) = −(ρχ(τ))′(sϕ,κ(u(τ, t))
in the circumstances of Theorem 13.1 and 14.1. Suppose to the contrary that thereexists some local maximum point (τ0, i), say, i = 0 so that u(τ0, 0) ∈ L0 at whichthe vector field Z is tangent to L0. Then we have
∂
∂τ(sϕ,κ ◦ u)(τ0, 0) = 0 (C.2)
which implies ∂u∂τ is tangent to the intersection
s−1(r0) ∩ L0, r0 := sϕ,κ(u(τ0, 0)).
On the other hand, Z is tangent to L0 at u(τ0, 0) by the Z-invariance of L thereon.In particular Tu(τ0,0)(s
−1ϕ,κ(r0) ∩ L0) ⊂ ker(λ|s−1
ϕ,κ(r0)). Then we rewrite
∂
∂t(sϕ,κ ◦ u)(τ0, 0) = dsϕ,κ
(∂u
∂t
)= −(dsϕ,κ ◦ J)(J
(∂u
∂t
)= λ
(∂u
∂τ
)= 0
where the last vanishing follows from the Z-invariance of L. On the other hand,(C.2) and (C.1) also imply ∆(sϕ,κ ◦ u) ≥ 0. This is a contradiction to the strongmaximum principle which should imply
∂
∂t(sϕ,κ ◦ u)(τ0, 0) > 0
unless sϕ,κ ◦ u is a constant function in which case there is nothing to prove. Thisfinishes the proof.

GEOMETRY OF LIOUVILLE SECTORS AND THE MAXIMUM PRINCIPLE 75
References
[Alb05] Peter Albers, On the extrinsic topology of lagrangian submanifolds, Int. Math. Res.
Not. (2005), no. 38, 2341–2371.
[AS10] Mohammed Abouzaid and Paul Seidel, An open string analogue of Viterbo functori-ality, Geom. Topol. 14 (2010), no. 2, 627–718. MR 2602848 (2011g:53190)
[Bao15] Erkao Bao, On J-holomorphic curves in almost complex manifolds with asymptoticallycylindrical ends, Pacific J. Math. 278 (2015), no. 2, 291–324.
[Bao16] , On Hofer energy of J-holomorphic curves for asymptotically cylinderical J ,
J. Symplectic Geom. 14 (2016), no. 1, 97–118.[CE] Kai Cieliebak and Yakov Eliashberg, From Stein to Weinstein and back – symplec-
tic geometry of affine complex manifolds –, AMS Colloquium Publications, vol. 59,
American Mathematical Society, Providence, RI.[EHS95] Y. Eliashberg, H. Hofer, and D. Salamon, Lagrangian intersections in contact geome-
try, Geom. Funct. Anal. 5 (1995), no. 2, 244–269.
[FOOO19] Kenji Fukaya, Yong-Geun Oh, Hiroshi Ohta, and Kaoru Ono, Spectral invariants withbulk, quasi-morphisms and Lagrangian Floer theory, Mem. Amer. Math. Soc. 260
(2019), no. 1254, x+266.
[FOOO20] , Kuranishi Structures and Virtual Fundamental Chains, Springer Monographs
in Mathematics, Springer, Singapore, 2020, 638 pp.
[Gan13] Sheel Ganatra, Symplectic cohomology and duality for the wrapped fukaya category,arxiv.org:1304.7312, 2013.
[Gir17] E. Giroux, Ideal Liouville domains - a cool gadget, arXiv:1708.08855, 2017.
[Got82] Mark J Gotay, On coisotropic imbeddings of presymplectic manifolds, Proc. Amer.Math. Soc. 84 (1982), no. 1, 111–114.
[GPS18] Sheel Ganatra, John Pardon, and Vivek Shende, Sectorial descent for wrapped Fukaya
categories, arXiv:1809.03427v2, 2018.[GPS20] , Covariantly functorial wrapped Floer theory on Liouville sectors, Publ. Math.
Inst. Hautes Etudes Sci. 131 (2020), 73–200.
[Gro17] Yoel Groman, Floer theory on open manifolds, preprint, arXiv:1510.04265v5.
[Hor] Lars Hormander, An Introduction to Complex Analysis in Several Variables, North-Holland Mathematical Library, vol. 7, North-Holland Publishing Co., Amsterdam.
[KO01] Rajesh Kasturirangan and Yong-Geun Oh, Floer homology of open subsets and a
relative version of Arnold’s conjecture, Math. Z. 236 (2001), no. 1, 151–189.[Oan06] Alexandru Oancea, The Kunneth formula in Floer homology for manifolds with re-
stricted contact type boundary, Math. Ann. 334 (2006), no. 1, 65–89.
[Oh97] Yong-Geun Oh, Symplectic topology as the geometry of action functional. i. relativefloer theory on the cotangent bundle, J. Differential Geom. 46 (1997), no. 3, 499–577.
[Oh01] , Floer homology and its continuity for non-compact Lagrangian submanifolds,
Turkish J. Math. 25 (2001), no. 1, 103–124. MR 1829082[Oh15] , Symplectic Topology and Floer Homology. vol. 1., New Mathematical Mono-
graphs, 28., Cambridge University Press, Cambridge., 2015.[Oh21] , Monoid of Liouville sectors with corners and its intrinsic characterization,
arXiv:2110.11726, 2021.[OT19] Yong-Geun Oh and Hiro Lee Tanaka, Continuous and coherent actions on wrapped
Fukaya categories, arXiv:1911.00349, 2019.[OT20] , Holomorphic curves and continuation maps in Liouville bundles,
arXiv:2003.04977, 2020.[OW18] Yong-Geun Oh and Rui Wang, Analysis of contact Cauchy-Riemann maps II: Canoni-
cal neighborhoods and exponential convergence for the Morse-Bott case, Nagoya Math.
J. 231 (2018), 128–223.[Sei03] Paul Seidel, A long exact sequence for symplectic Floer cohomology, Topology 42
(2003), no. 5, 1003–1063. MR 1978046 (2004d:53105)
Center for Geometry and Physics, Institute for Basic Science (IBS), 77 Cheongam-ro, Nam-gu, Pohang-si, Gyeongsangbuk-do, Korea 790-784 & POSTECH, Gyeongsangbuk-
do, Korea
Email address: [email protected]

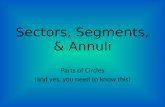


![Area of a circle Geometry 7 - WordPress.com · March 07, 2017 Geometry 7.9 Area of Circles & Sectors Learning Target: I can evaluate the area of circles & sectors. [G.C.5] A circle](https://static.fdocument.org/doc/165x107/5b375ebb7f8b9a5a518c45d4/area-of-a-circle-geometry-7-march-07-2017-geometry-79-area-of-circles-.jpg)