Formations Near The Libration Points: Design Strategies Using Natural And Non-Natural Arcs
77
1 FORMATIONS NEAR THE LIBRATION POINTS: DESIGN STRATEGIES USING NATURAL AND NON-NATURAL ARCS K. C. Howell and B. G. Marchand
-
Upload
belinda-marchand -
Category
Technology
-
view
91 -
download
0
description
Talk charts from 2004 Flight Mechanics Symposium, held September 14-16 2004, at NASA Goddard Space Flight Center
Transcript of Formations Near The Libration Points: Design Strategies Using Natural And Non-Natural Arcs

1
FORMATIONS NEAR THE LIBRATION POINTS: DESIGN STRATEGIES
USING NATURAL AND NON-NATURAL ARCSK. C. Howell and B. G. Marchand

2
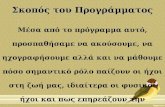
Formations Near the Libration Points
Moon
1L
2L
x
( )ˆ inertialXB
θ
y
Chief S/C Path(Lissajous Orbit)
EPHEM = Sun + Earth + Moon Motion From Ephemeris w/ SRPCR3BP = Sun + Earth/Moon barycenter Motion Assumed Circular w/o SRP
Deputy S/C(Orbit Chief Vehicle)

3
Control Methodologies Consideredin both the CR3BP and EPHEM Models
• Continuous Control– Linear Control
• State Feedback with Control Input Lower Bounds• Optimal Control → Linear Quadratic Regulator (LQR)
– Nonlinear Control• Input Feedback Linearization (State Tracking)• Output Feedback Linearization (Constraint Tracking)
– Spherical + Aspherical Formations (i.e. Parabolic, Hyperbolic, etc.)
• Discrete Control– Nonlinear Optimal Control
• Impulsive• Constant Thrust Arcs
– Impulsive Targeter Schemes • State and Range+Range Rate
– Natural Formations Impulsive Deployment– Hybrid Formations Blending Natural and Non-Natural Motions

4
IMPULSIVE FORMATION KEEPING:TARGETER METHODS

5
State Targeter: Impulsive Control Law Formulation
1V∆
2V∆
3V∆
Segment of Nominal Deputy Path
0vδ −
0vδ +
0V∆
1rδ
2rδ
3rδ
STM
1 1
1 1
k kk k
k kk k k
A Br rC Dv v V
+ +− −+ +
= + ∆
δ δδ δ
( )11k k k k k kV B r A r v− −+∆ = − −δ δ δ
Segment of Chief S/C Path
C(t1)
C(t2)
C(t3)
D(t1)
D(t2)
D(t3)

6
State Targeter: Radial Distance Error
( ) ˆ10 m Yρ =
Dis
tanc
e Er
ror R
elat
ive
to N
omin
al (c
m)
Time (days)
Max.Deviation
Nominal Separation

7
State Targeter:Achievable Accuracy
Max
imum
Dev
iatio
n fr
om N
omin
al (c
m)
Formation Distance (meters)
ˆr rY=

8
State Targeter: Maneuver Schedule

9
Range + Range Rate Targeter
Chief S/C
Deputy S/C
r
1V∆
2V∆
3V∆
( )1/ 2
Range + Range Rate Constraint:T
f ff
Tf f f
f
f
r rr
g r rrr
= =
( ) ( ) ( )STM
00 0 0
0 0
State Relationship Matrix
, ,f
r rrr rd g t t x t t
v Vt
r rr r
−
∂ ∂ ∂ ∂= Φ = Φ + ∆∂ ∂
Λ
∂ ∂
δδ
δ

10
Comparison of Range and State Targeters
Chief S/C at Origin
Deputy S/C Path

11
DESIGN OF NON-NATURAL FORMATIONSUSING NATURAL SOLUTION ARCS

12
CR3BP Analysis of Phase Space Eigenstructure Near Halo Orbit
( ) ( )( ) ( ) ( )1
,0 0
0 0Jt
x t x
E t e E x−
= Φ
=
δ δ
δ
Reference Halo Orbit
Chief S/C
Deputy S/C
( ) ( ) ( ) ( ) ( ) ( )6 6
1 1
:Solution to Variational Eqn. in terms of Floquet Modes
j jj j
jx t x t c t E t ce t t= =
= = =∑ ∑δ δ
Mode 1 1-D Unstable SubspaceMode 2 1-D Stable SubspaceModes (3,4) and (5,6) 4-D Center Subspace
Floquet Modes

13
Natural Solutions:Periodic Halo Orbits Near Libration Points
x
z
y
Earth
x
z
Sun

14
Natural Formations:Quasi-Periodic Relative Orbits → 2-D Torus
y
x
z
Chief S/C Centered View(RLP Frame)
y
x
x
z
y
z
z
xy

15
Floquet Controller(Remove Unstable + 2 Center Modes)
( )1
2 5 6 31 3 4
2 5 6 3
Remove Modes 1, 3, and 4:
0r r r
v v v
x x xx x x
x x x IV
−
= + + −∆
δ δ δαδ δ δ
δ δ δ
( )1
2 3 4 31 5 6
2 3 4 3
Remove Modes 1, 5, and 6:
0r r r
v v v
x x xx x x
x x x IV
−
= + + −∆
δ δ δαδ δ δ
δ δ δ
( )3
2,3,43 or
2,5 6
6
1
,
01
:Find that removes undesired response modes
j jj j
j
j
V xI
x
V
δ α δ= =
=
+ ∆ = +
∆
∑ ∑

16
Sample Deployment into Relative Orbits:1-∆V at Injection
Origin = Chief S/C
Deputy S/C
Qua
si-P
erio
dic
Origin = Chief S/C
3 Deputies
“Per
iodi
c”
1800 days

17
Natural Formations:Nearly Periodic and Drifting Relative Orbits
Chief S/C @ Origin 1800 days

18
Expansion of Drifting Vertical Orbit
Origin = Chief S/C
( )0r ( )fr t
18,000 days = 100 Revolutions

19
Transitioning Natural Motions into Non-Natural Arcs: Targeter Approach
STEP 1: Identify a suitable initial guess
Target Orbital Drift Control

20
Application of Two Level Corrector
( )qTΓ
( )0r t
( )mr t
( ) ( )0mr t r t=( )qV T∆
STEP 2: Apply 2-level corrector (Howell and Wilson:1996) w/ end-state constraint
STEP 3: Shift converged patch states forward by 1 periodSTEP 4: Reconverge Solution

21
Drift Controlled Vertical Orbit (6 Revs)
( )3 5 m/sec
1 maneuver/yearV∆ = −

22
Geometry of Natural Solutions in the Ephemeris Model
w/ SRP
Inertial Frame Perspective:
Rotating Frame Perspective:

23
Transitioning Natural Motions into Non-Natural Arcs: IFL Example
(1) Consider 1st Rev Along Orbit #4as initial guess to simple targeter.
(2) Choose initial state on xz-plane(3) Target next plane crossing to be ⊥(4) Use resulting arc as half of the
reference motion.(5) Numerically mirror solution about
xz-plane and store as nominal.(6) Use IFL control to enforce a
closed orbit using stored nominal.
Chief S/C @ OriginSphere for Visualization Only

24
Hybrid Control:Natural Motions + Continuous Control
½ Period Natural Arc½ Period IFL Control

25
Concluding Remarks• Precise Formation Keeping → Continuous Control
– Is it possible? • Depends on hardware capabilities and nominal motion specified• Not if thruster On/Off sequences are required & tolerances too high
• Precise Navigation → Natural Formations– Targeter Methods
• Natural motions can be forced to follow non-natural paths• Success depends on non-natural motion specified
– Hybrid Methods (Natural Arcs + Continuous Thrust Arcs)• May prove beneficial for non-natural inertial formation design.

26
BACKUP SLIDES

27
Hybrid Control: Accelerations

28
( )1/ 2
Range + Range Rate Constraint:T
f ff
Tf f f
f
f
r rr
g r rrr
= =
( ) ( ) ( ) ( )STM
*0 0 0 0 0
0
State Relationship Matrix
, ,f f f
r rg x r rd g g g x t t x t t x
r rxr
tx
r
δ δ δ
∂ ∂ ∂ ∂ ∂ ∂= − = = Φ = Φ ∂ ∂∂ ∂ ∂
Λ
∂
*0
0
First Order Approximation:
f fgg g xxδ∂
= +∂
Radial Targeter: Control Law Formulation
**
Desired Range + Range Rate:
0f
fr
g
=

29
Dynamical Model
( )( ) ( )
( ) ( )2
22
22
3 31, 2,
s j js
js s j j
s
P P P PPP
NP
PP P P P P P srPI
j j sp
r r u trr r r
ftµ
µ= ≠
− + −=
+ +∑
Gravity TermsSolar Radiation Pressure
Control InputGeneralized Dynamical Model for Each S/C:
( )( )
Assumptions:Chief S/C Evolves Along Natural Solution 0 (Nominal)
Deputy S/C Evolves Along Non-Natural Solution 0c
d
u t
u t
→ ∴ =
→ ∴ ≠

30
Chief S/C Motion: Natural Solutions Near L1 and L2
“Hal
o” O
rbits
Nea
rLi
Liss
ajou
s Tra
ject
orie
s Nea
rLi
Sun Sun

31
Controlled Deputy S/C Motion (Example 1):Formation Fixed in the Rotating Frame
Chief S/CDeputy S/C
yρ ρ=
C(t1)
C(t2)
C(t3)
C(t4)
D(t1)
D(t2)
D(t3)
D(t4)

32
X [au]
Y [a
u]
Controlled Deputy S/C Motion (Example 2):Formation Fixed in the Inertial Frame
Yρ ρ=Chief S/CDeputy S/C
C(t1)
C(t2)C(t3)
C(t4)
D(t1)
D(t2)D(t3)
D(t4)

33
MAXIM:APPLICATIONS OF IFL AND OFL

34
MAXIM Mission Sequence

35
MAXIM:THRUSTER ON-OFF SEQUENCE

36
Free Flyer Configuration
FF2
FF1
FF3
FF4
FF5 FF6
Hub

37
Radial Error wrt. Hub S/C
Thrusters off = 100,000 sec
W Wr r−
Nominal Radial Vector in UVW Coordinates
Actual Radial Vector in UVW Coordinates

38
Free FlyersUV-Plane Angular Drift (DEG)ν ν−
ε ε−
NominalActual
NominalActual

39
Thrust ProfileThrusters Off Between t1 = 1 day & t2 = t1 + 100,000 sec.
A BC
( )O 0.05 Nµ ( )O 0.05 Nµ
3 mN≈ 3 mN≈

40
MAXIM:FORMATION RECONFIGURATION

41
Target Reconfiguration
X
Z
Y
Detector Target #11w1u
2w
2u
Target #2
1v
2v
Hub (t1): α = 0°, δ = 0°
Hub (t2): α = 0°, δ = 0°

42
Graphical Representation of Reconfiguration for Free Flyers
1ˆˆ ||w X
2ˆ ˆ||w Y
INITIAL ORIENTATION OF UV-PLANE
FINAL ORIENTATION OF UV-PLANE

43
Thrust to Reconfigure From α = 0o to α = 90o with δ = 0o
1 | ˆˆ | w X2ˆ ˆTarget: || w Y
Reconfiguration Time Increased to7 days to reduce Detector S/C Control Thrust

44
Mission Specifications• Hold periscope positions to within 15-µm• Detector pointing accuracy – arcminutes• ∠ Periscope-Detector-Target alignment – µas• Phase 1 1 Target /week• Phase 2 1 Target/ 3 weeks• Hub inter. comm. port between detector & freeflyers• Reconfiguration (Formation Slewing) Times:
– 1 Day for Phase 1– 1 Week for Phase 2
• Propulsion– Formation Slewing 0.02 N (Hydrazine)– Formation keeping 0.03 mN (PPTs)
Frequent Reconfigurations

45
NATURAL FORMATIONS

46
Natural Formations:String of Pearls
x y
z z
y
x

47
Deployment into Torus(Remove Modes 1, 5, and 6)
Origin = Chief S/C
Deputy S/C( ) [ ]( ) [ ]0 5 00 0 m
0 1 1 1 m/sec
r
r
=
= −

48
Deployment into Natural Orbits(Remove Modes 1, 3, and 4)
Origin = Chief S/C
3 Deputies
( ) [ ]( ) [ ]
00 0 0 m
0 1 1 1 m/sec
r r
r
=
= −

49
SPHERICAL FORMATIONS

50
OFL Controlled Response of Deputy S/CRadial Distance Tracking
2 ( ) ( ) ( )2
, Tg r r r r ru t r r f rr rr
= − + − ∆
3
4
( ) ( ) ( )2 2
,12
Tg r r r ru t r f rr r
= − − ∆
( ) ( ) ( )2, 3Tr r ru t rg r r r r f r
rr = − − + − ∆
Control Law
( ) ( ),ˆ
H r ru t r
r=
Geometric Approach:Radial inputs only1
1u
3u
2u
4u
Chief S/C @ Origin (Inside Sphere)

51
OFL Controlled Response of Deputy S/CRadial Distance + Rotation Rate Tracking
* 5 kmr =
1 rev / 6 hrs1 rev / 1 day
Chief S/C @ Origin (Inside Sphere)

52
Impact Commanded Rotation Rate on Cost
1 rev /24 hrs 0.19 mN1 rev /12 hrs 0.76 mN1 rev / 6 hrs 6.40 mN1 rev / 1 hrs 106.50 mN
→→→→
700 kgsm =

53
ASPHERICAL FORMATIONS

54
Parameterization of Parabolic Formation
pa
ph
puν
( )3ˆ focal linee
1e
Nadir
q
1 2 3ˆ ˆ ˆiCDEr xe ye ze= + +
Chief S/C (C)
iDeputy S/C (D )
{ }i i
i i
CD CDTI EE I
CD CDE IE I
r rC
r r
=
: inertially fixed focal frame: inertially fixed ephemeris frame
EI
/ cos
/ sin
p p p
p p p
p
x a u h
y a u h
z u q
ν
ν
=
=
= +
Zenith
Transform State from Focal to Ephemeris Frame

55
Controller Development
( ) ( )
( ) ( )
( ) ( )
( )( )( )
( )
2 22 2 2
2 22 2 2
2 2 2 222 2
2 2 20 ,
2 2 21 ,
0 2
u x y
x
y q x y z
z
h h hx y g u u x y x f y fa a au
h h hx y u g q q x y x f y f fa a a
ux y xx yy xy yxgx y x y
x yν ν
− + + ∆ + ∆ − − = + + + ∆ + ∆ −∆ + −− + ++ + +
( )( )2 2
x yy f x f
x y
∆ − ∆ +
( ) ( ) ( )( ) ( ) ( )
( ) ( )
* * 2 *
* * *
*
2
*
, 2
, 2
u p p p n p p n p p
q p p n
n
n
g u
g
u u u u u u
g u u q q q q
k
q
ν ν ν ω ν
ω ω
ω ω
ν
= − − − −
= − − − −
= − −
Desired Response for , , and :u q ν
Solve for Control Law:
, critically dampedu qδ δ →
exponential decayδθ →

56
OFL Controlled Parabolic Formation
X
Z
Y0t
0 1.6 hrst +
0 3.8 hrst +
0 8 hrst +
0 5 dayst +
0 6 dayst +
3e
10 km1 rev/day500 m
500 m
Phase I: 200 m
Phase II: 300 m /1 day
Phase III: 500 m
p
p
p
p
p
q
ha
uuu
ν===
=
=
=
=

57
OFL Thrust Profile700 kgsm =

58
New Maxim Pathfinder
Science Phase #2
High Resolution
(100 nas)
20,000 km
1 km
http://maxim.gsfc.nasa.gov/documents/SPIE-2002/spie2002.ppt

59
Maxim Configuration Example
19,500km1 rev/day
500 m
1 km
1 km
p
p
p
q
uha
ν===
=
=
700 kgsm =

60
NONLINEAR OPTIMAL CONTROL

61
Formulation( ) ( ) ( ) ( )
11 1
0 0min , , , ,
i
i
tN N
N i i i Ni i t
J x L t x u x L t x u d tφ φ+− −
= =
= + = +∑ ∑ ∫ Subject to:
( ) ( )1 0, , ; Subject to 0i i i ix F t x u x x+ = =
( ) ( ) ( )
( )( )
( ) ( ) ( )
1
11
1 1 1
00
min
, ,, , ;
, ,
Subject to 0
N n N N
i i i ii i i i
n i n i i i i
J x x t x
x F t x ux F t x u
x t x t L t x u
xx
φ φ+
++
+ + +
= + =
= = = +
=
Equivalent Representation as Augmented Nonlinear System:

62
Euler-Lagrange Optimality Conditions(Based on Calculus of Variations)
( )1
1
Condition #1: 1
Condition #2: 0 ; 0, , 1
NT T Tii i N
i N
Ti
i
i
i
ii
i
xHx x
Fx
F Nu
H iu
φλ λ λ
λ
+
+
∂ ∂ ∂∂
∂
= = → = ∂ ∂ ∂
∂= = = −∂
( )1 , ,Ti i i i iH F t x uλ +=
Identify and from augmented linear system.i i
i i
F Fx u∂ ∂∂ ∂

63
Identification of Gradients From the Linearized Model
( ) ( ) ( ) ( ) ( )x t A t x t B t u tδ δ δ= +
( )( ) 0
0
A tA t L
x
= ∂ ∂
( )3
3
0
0T
B t I =
( )( )
( )( )
0
11
0, ,;
0 0, , nn
x xf t x uxxL t x ux ++
= =
Augmented Nonlinear System:
Augmented Linear System:

64
Solution to Linearized Equations
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )0
0 0
0 0 0 0 7
, ,
, , ; ,
t
t
x t t t x t B u d
t t A t t t t t I
δ δ τ τ δ τ τ= Φ + Φ
Φ = Φ Φ =
∫
i
Fx∂∂
Relation to Gradients in E-L Optimality Conditions:
( ) ( ) ( ) ( )1
1 1 1, ,i
i
t
i i i i it
x t t x t B u dδ δ τ τ δ τ τ+
+ + += Φ + Φ∫

65
Control Gradient for Impulsive Control( )( )( )( ) ( )
1 1
1
1 1
,
,
, ,
i i i i
i i i i
i i i i i i
x t t x
t t x B V
t t x t t B V
δ δ
δ
δ
− ++ +
−+
−+ +
= Φ
= Φ + ∆
= Φ +Φ ∆
i
Fu∂∂
( )1,i ii
F t t Bu +
∂= Φ
∂

66
Control Gradient for Constant Thrust Arcs
( ) ( ) ( )1
1 1 1, ,i
i
t
i i i i i it
x t t x t B d uδ δ τ τ τ δ+
+ + +
= Φ + Φ
∫
i
Fu∂∂
( ) ( ) ( )1
11, ,
i
i
t
i i ii t
F t t t B du
τ τ τ+
−+
∂= Φ Φ
∂ ∫
( )( )
( )( )( ) ( )( )
1
1*
, ,, ,
,,,,
n
ii
ii
x f t x ux L t x u
A t t tt tt t Bt t
+
−
= ΦΦ ΦΦ
Equations to Integrate Numerically

67
Numerical Solution Process: Global Approach
( )0(1) ; ( 0,1,..., 1)
(2)1-Scalar Equation to Optimize in 3 1 Control Variables
Use optimizer to identify optimal
Input , , and initia
given .
During each iteratio
l guess for
n
ii
N i
i
i NN
Hu
x u
u
t = −
−
∂∂
( )( )
( ) Sequence forward and store of the optimizer, the following steps are followed:
( ) Evaluate cost functional,
( ) Evaluate 1
; 1
(
,
, 1
N
NT NN
N
i
N
b J x
xc
x x
a x i N
d
φ
φ φλ
= … −
=
∂ ∂= = ∂ ∂
( )
) Sequence backward and compute ; 1, ,1
and used in next update of control input.
ii
i
i
i
H i Nu
He Ju
λ ∂= −
∂∂∂

68
Formulation( ) ( ) ( ) ( )
11 1
0 0min , , , ,
i
i
tN N
N i i i Ni i t
J x L t x u x L t x u d tφ φ+− −
= =
= + = +∑ ∑ ∫ Subject to:
( ) ( )1 0, , ; Subject to 0i i i ix F t x u x x+ = =
( ) ( ) ( )
( )( )
( ) ( ) ( )
1
11
1 1 1
00
min
, ,, , ;
, ,
Subject to 0
N n N N
i i i ii i i i
n i n i i i i
J x x t x
x F t x ux F t x u
x t x t L t x u
xx
φ φ+
++
+ + +
= + =
= = = +
=
Equivalent Representation as Augmented Nonlinear System:

69
Impulsive Optimal ControlMinimize State Error with End-State Weighting
( ) ( ) ( ) ( )11
0
1 1min2 2
i
i
tNT T
N N N Ni t
J x x W x x x x Q x x d t+−
=
= − − + − −∑ ∫

70
State Corrector vs. Nonlinear Optimal Control:Cost Function

71
State Corrector vs. Nonlinear Optimal Control:Impulsive Maneuver Differences

72
Impulsive Radial Optimal Control
( )11 2
0
1min2
i
i
tN
i t
J q r r dt+−
=
= −∑ ∫

73
Radial Optimal Control:Maneuver History

74
State Corrector vs. Nonlinear Optimal Control:Cost Function

75
RANGE + RANGE RATE TARGETER

76
Comparison of Range and State Targeters

77
Range Targeter:Spatial Behavior of Corrected Solution
Chief S/C at Origin
Deputy S/C Path