Finite Elemente - ifm.mathematik.uni-wuerzburg.dedobro/pub/fem.pdf · Satz 1.2 Cm(Ω) sind Banach...
59
Finite Elemente Manfred Dobrowolski * Inhaltsverzeichnis 1 Notation und elementare Ungleichungen 2 1.1 Notation .............................................. 2 1.2 Funktionenr¨ aume ......................................... 2 1.3 Elementare Ungleichungen .................................... 3 2 Diskretisierungen der Poisson-Gleichung 5 2.1 Klassische L¨ osungen und Maximumprinzip ........................... 5 2.2 Differenzenverfahren ....................................... 5 2.3 Lineare Finite Elemente ..................................... 9 3 Hilbertraummethode und Ritzsches Verfahren 12 3.1 Das Fundamentallema der Variationsrechnung ......................... 12 3.2 Schwache Ableitungen ...................................... 12 3.3 Die Sobolev R¨ aume ........................................ 14 3.4 Sobolev-Ungleichungen ...................................... 15 3.5 Randwerte von Sobolev Funktionen und die R¨ aume H m,p 0 (Ω) ................ 16 3.6 Die Darstellungss¨ atze von Riesz und Lax-Milgram ...................... 17 3.7 Existenz schwacher L¨ osungen .................................. 18 3.8 Das Ritzsche Verfahren ..................................... 19 4 Finite Elemente und Interpolation 21 4.1 Finite Elemente R¨ aume ..................................... 21 4.2 Parametrische Finite Elemente ................................. 22 4.3 Dreiecks- und Tetraederelemente ................................ 22 4.4 Rechtecks- und Quaderelemente ................................. 26 4.5 Parametrische Elemente auf allgemeinen Vierecken ...................... 28 4.6 Polynominterpolation in Sobolev R¨ aumen ........................... 28 4.7 Inverse Absch¨ atzungen ...................................... 33 4.8 Approximation nichtglatter Funktionen ............................ 34 5 Elliptische Gleichungen zweiter Ordnung 37 5.1 Allgemeine Konvergenzs¨ atze ................................... 37 5.2 Lineare Finite Elemente ..................................... 38 5.3 Finite Elemente mit Kubaturformeln .............................. 41 5.4 Ein nichtkonformes Verfahren .................................. 43 5.5 L 2 -Fehlerabsch¨ atzungen ..................................... 45 5.6 Allgemeine Randbedingungen .................................. 46 6 Gemischte Verfahren 49 6.1 Das Stokes System ........................................ 49 6.2 Abstrakte Sattelpunktprobleme ................................. 50 6.3 Approximation abstrakter Sattelpunktprobleme ........................ 52 6.4 Finite Elemente Approximation des Stokes-Problems ..................... 55 6.5 Statische Kondensation f¨ ur das Mini-Element ......................... 57 * Institut f¨ ur Mathematik, Universit¨ at W¨ urzburg, Am Hubland, 97047 W¨ urzburg 1
Transcript of Finite Elemente - ifm.mathematik.uni-wuerzburg.dedobro/pub/fem.pdf · Satz 1.2 Cm(Ω) sind Banach...

Finite Elemente
Manfred Dobrowolski∗
Inhaltsverzeichnis
1 Notation und elementare Ungleichungen 21.1 Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Funktionenraume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Elementare Ungleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Diskretisierungen der Poisson-Gleichung 52.1 Klassische Losungen und Maximumprinzip . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Differenzenverfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.3 Lineare Finite Elemente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3 Hilbertraummethode und Ritzsches Verfahren 123.1 Das Fundamentallema der Variationsrechnung . . . . . . . . . . . . . . . . . . . . . . . . . 123.2 Schwache Ableitungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.3 Die Sobolev Raume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.4 Sobolev-Ungleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.5 Randwerte von Sobolev Funktionen und die Raume Hm,p
0 (Ω) . . . . . . . . . . . . . . . . 163.6 Die Darstellungssatze von Riesz und Lax-Milgram . . . . . . . . . . . . . . . . . . . . . . 173.7 Existenz schwacher Losungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.8 Das Ritzsche Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4 Finite Elemente und Interpolation 214.1 Finite Elemente Raume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.2 Parametrische Finite Elemente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224.3 Dreiecks- und Tetraederelemente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224.4 Rechtecks- und Quaderelemente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.5 Parametrische Elemente auf allgemeinen Vierecken . . . . . . . . . . . . . . . . . . . . . . 284.6 Polynominterpolation in Sobolev Raumen . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.7 Inverse Abschatzungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.8 Approximation nichtglatter Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5 Elliptische Gleichungen zweiter Ordnung 375.1 Allgemeine Konvergenzsatze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375.2 Lineare Finite Elemente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385.3 Finite Elemente mit Kubaturformeln . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415.4 Ein nichtkonformes Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.5 L2-Fehlerabschatzungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.6 Allgemeine Randbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6 Gemischte Verfahren 496.1 Das Stokes System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 496.2 Abstrakte Sattelpunktprobleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 506.3 Approximation abstrakter Sattelpunktprobleme . . . . . . . . . . . . . . . . . . . . . . . . 526.4 Finite Elemente Approximation des Stokes-Problems . . . . . . . . . . . . . . . . . . . . . 556.5 Statische Kondensation fur das Mini-Element . . . . . . . . . . . . . . . . . . . . . . . . . 57
∗Institut fur Mathematik, Universitat Wurzburg, Am Hubland, 97047 Wurzburg
1

1 Notation und elementare Ungleichungen
1.1 Notation
Die Komponenten eines Vektors x ∈ Rn werden meist als xi geschrieben. Auf den Vektoren ist dasinnere Produkt und der Betrag
xy =n∑
i=1
xiyi, |x| = (x, x)1/2
definiert. Wir verwenden auch die Summenkonvention, die besagt, daß uber doppelt auftretende kleinelateinische Indizes von 1 bis n oder von 0 bis n summiert wird. Dann laßt sich beispielsweise das innereProdukt als xy = xiyi schreiben.
Fur x ∈ Rn bezeichnen wir mit
BR(x) = y ∈ Rn : |x− y| < R
die R-Kugel um den Punkt x. BR(x) ist dann die zugehorige abgeschlossene Kugel.Der Betragsstrich wird auch dazu verwendet, die euklidische Norm von Tensoren zu bezeichnen. Fur
eine n× n-Matrix A = (aij)i,j=1,...,n erhalten wir insbesondere
|A| =(
n∑
i,j=1
|aij |2)1/2
.
Mit Ω ⊂ Rn sind immer beschrankte Gebiete gemeint, das sind offene und zusammenhangende Men-gen. Fur eine Menge K ⊂ Rn ist K der Abschluß von K, Kc das Komplement von K, K das Innerevon K und ∂K der Rand von K. Die Schreibweise Ω0 ⊂⊂ Ω bedeutet, daß Ω0 kompakt enthalten in Ωist, also Ω0 kompakt mit Ω0 ⊂ Ω. Mit dist (x,K) bezeichnen wir den Abstand des Punktes x zur MengeK, also infy∈K |x− y|.
Fur eine Funktion u : Ω → R heißt
supp(u) = x ∈ Ω : u(x) 6= 0
der Trager von u.Die partiellen Ableitungen erster Ordnung ∂
∂xiu nach ei = i− terEinheitsvektor werden meist kurzer
als Diu, bei auf dem R2 definierten Funktionen auch Dxu, Dyu geschrieben. Der Gradient einer Funktionu ist der Vektor
Du = (D1u, ..,Dnu)T .
Entsprechend konnen die partiellen Ableitungen der Ordnung m in Form eines Tensors angeordnet wer-den,
Dmu = (Di1,...,imu)1≤ij≤n.
Fur partielle Ableitungen hoherer Ordnung verwendet man besser die Multiindexnotation. Ein Mul-tiindex ist ein Vektor α = (α1, .., αn)T mit αi ∈ N0 mit den Konventionen
|α| =
n∑
i=1
αi, α! =
n∏
i=1
αi!, xα = xα1
1 . . . xαn
n , Dαu =∂|α|
∂xα1
1 . . . ∂xαnnu.
1.2 Funktionenraume
Mit Ck(Ω), k ∈ N0, bezeichnen wir den Vektorraum der in Ω k-mal stetig differenzierbaren Funktionen,Ck
0 (Ω) sind die Funktionen aus Ck(Ω) mit kompaktem Trager in Ω. Die Raume C∞(Ω) und C∞0 (Ω) sind
entsprechend definiert.Da die Funktionen in Cm(Ω) und C∞(Ω) nicht beschrankt zu sein brauchen, definieren wir außerdem:
Definition 1.1 C(Ω) ist der Raum der in Ω beschrankten und gleichmaßig stetigen Funktionen. Cm(Ω)ist der Unterraum von Cm(Ω), der aus den Funktionen besteht, die beschrankte und gleichmaßig stetigeAbleitungen fur alle |α| ≤ m besitzen. Auf Cm(Ω) definieren wir die Normen
‖u‖m,∞;Ω = max0≤|α|≤m
supx∈Ω
|Dαu(x)|.
2

Satz 1.2 Cm(Ω) sind Banach Raume unter den Normen ‖·‖m,∞;Ω.
Man uberlegt sich leicht, daß man den Funktionen aus Cm(Ω) eindeutige Randwerte zuordnen kann.Fur einen Funktionenraum V besteht der Raum V n aus den vektorwertigen Funktionen u =
(u1, . . . , un)T mit ui ∈ V.Auf den meßbaren Funktionen auf Ω definieren wir eine Aquivalenzrelation durch
u ∼ v ⇔ u = v f.u. auf Ω,
und betrachten statt den meßbaren Funktionen die zugehorigen Aquivalenzklassen. Anders ausgedruckt:Wir identifizieren meßbare Funktionen, die bis auf eine Nullmenge ubereinstimmen.
Definition 1.3 Fur 1 ≤ p < ∞ besteht der Raum Lp(Ω) aus allen meßbaren Funktionen u, sodaß |u|p
integrierbar auf Ω ist. Eine meßbare Funktion u gehort zum Raum L∞(Ω), wenn der Ausdruck
vraimaxx∈Ω
|u(x)| = infN
supx∈Ω\N
|u(x)|,
endlich ist. Das Infimum wird dabei uber alle Mengen N ⊂ Ω mit µ(N) = 0 gebildet. Eine solche Funktionu heißt dann wesentlich beschrankt. Mit Lp
loc(Ω) bezeichnen wir den Raum der Funktionen, die fur jedeTeilmenge Ω0 ⊂⊂ Ω zu Lp(Ω0) gehoren.
Satz 1.4 Die Raume Lp(Ω) sind Banach Raume unter den Normen
‖u‖p;Ω =(
∫
Ω
|u(x)|p dx)1/p
, 1 ≤ p <∞, ‖u‖∞;Ω = vraimaxx∈Ω
|u(x)|,
L2(Ω) ist Hilbert Raum unter dem inneren Produkt
(u, v) =
∫
Ω
u(x)v(x) dx.
1.3 Elementare Ungleichungen
Viele Ungleichungen der Analysis lassen sich aus einem einfachen geometrischen Argument ableiten:
Satz 1.5 Sei f : R+ → R+ eine stetige und monoton wachsende Funktion mit f(0) = 0 und f(x) → ∞fur x→ ∞. Dann gilt fur alle a, b ∈ R+
ab ≤
∫ a
0
f(x) dx+
∫ b
0
f−1(y) dy (1.1)
Beweis: Wir tragen das Intervall (0, a) auf der x-Achse und dasIntervall (0, b) auf der y-Achse ab. Dann ist ab der Flachenin-halt des zugehorigen Rechtecks,
∫ a
0f(x) dx die Flache unter-
halb der Kurve und∫ b
0 f−1(y) dy die zwischen der Kurve und
der positiven y-Achse eingeschlossene Flache. Damit ist dieUngleichung bewiesen, Gleichheit tritt genau dann auf, wennf(a) = b.
y
xa
b f
Die Youngsche Ungleichung mit ε
ab ≤ε
2a2 +
1
2εb2 ∀a, b, ε ∈ R+ (1.2)
erhalt man aus diesem Satz mit f(x) = εx, f−1(y) = ε−1y; sie laßt sich auch mit der binomischen Formelbeweisen. Zum Beweis der verallgemeinerten Youngschen Ungleichung
ab ≤1
pεpap +
1
qε−qbq ∀a, b, ε ∈ R+ (1.3)
mit p−1 + q−1 = 1, 1 < p, q < ∞, wahlen wir f(x) = xp−1 mit f−1(y) = y1/(p−1) und wenden den Satzauf εa und ε−1b an.
3

Ein anderer Typ von Ungleichung ist die Cauchy-Ungleichung
|(x, y)| ≤ |x||y| ∀x, y ∈ Rn, (1.4)
die mit einem Homogenitatsargument bewiesen wird, das in dieser Form sehr haufig vorkommt. Zunachstist die Ungleichung richtig, wenn einer der beiden Vektoren verschwindet. Fur x, y 6= 0 kann man dieCauchy-Ungleichung durch die Setzung x = |x|−1x, y = |y|−1y auf den Fall |x| = |y| = 1 zuruckfuhrenund dadurch die Homogenitat der Cauchy-Ungleichung ausnutzen. Fur solche x, y erhalten wir aus derYoungschen Ungleichung
|(x, y)| =∣
∣
∣
n∑
i=1
xiyi
∣
∣
∣ ≤n∑
i=1
|xi||yi| ≤1
2
∑
|xi|2 +
1
2
∑
|yi|2 = 1
Die verallgemeinerte Cauchy-Ungleichung
|(x, y)| ≤(
n∑
i=1
|xi|p)1/p (
n∑
i=1
|yi|q)1/q
∀x, y ∈ Kn (1.5)
mit p−1 + q−1 = 1, 1 < p, q < ∞, beweist man genauso mit Hilfe der verallgemeinerten YoungschenUngleichung.
Lemma 1.6 (Holdersche Ungleichung) Sei 1 < p, q < ∞ mit p−1 + q−1 = 1. Wenn u ∈ Lp(Ω) undv ∈ Lq(Ω), dann ist uv ∈ L1(Ω) und
‖uv‖1;Ω ≤ ‖u‖p;Ω‖v‖q;Ω.
Beweis: Das Produkt uv ist meßbar, sodaß wir nur zeigen mussen, daß uv durch eine integrierbareFunktion abgeschatzt werden kann. In der Youngschen Ungleichung (1.3) setzen wir ε = 1 und
a = |u(x)|, b = |v(x)|,
daher
|u(x)v(x)| ≤1
p|u(x)|p +
1
q|v(x)|q .
Damit haben wir das gewunschte Ergebnis fur Funktionen u, v mit ‖u‖p;Ω = ‖v‖q;Ω = 1. Weil dieUngleichung trivialerweise erfullt ist, wenn eine der beiden Funktionen verschwindet, folgt die Ungleichungmit einem Homogenitatsargument.
4

2 Diskretisierungen der Poisson-Gleichung
2.1 Klassische Losungen und Maximumprinzip
Im ersten Randwertproblem der Poisson-Gleichung suchen wir eine Funktion u ∈ C2(Ω) ∩ C(Ω) mit
−∆u = f in Ω, u = g auf ∂Ω, (2.1)
wobei f, g vorgegebene Funktionen sind. Die Losung u muß die Differentialgleichung in jedem Punkt vonΩ erfullen und die Randwerte g stetig annehmen.
Die Poisson-Gleichung kommt in allen Natur- und Ingenieurwissenschaften in unterschiedlichen Zu-sammenhangen vor. Das einfachste Beispiel ist eine Membran, die im Gebiet Ω lokalisiert ist. u ist dieAuslenkung dieser Membran, wenn eine Kraft f, z.B. die Schwerkraft, auf diese wirkt. Die Randvorgabeu = g bedeutet, daß die Membran am Rande eingespannt ist.
Es muß nicht immer eine solche, wir sagen auch klassische Losung von (2.1) geben. Wenn es aber einegibt, so ist sie in der Klasse C2(Ω) ∩C(Ω) eindeutig bestimmt, wie gleich gezeigt wird.
Um ein Gefuhl fur die Losungen von (2.1) zu geben, beweisen wir das folgende Maximumprinzip.
Satz 2.1 (Maximumprinzip) Wenn fur u ∈ C2(Ω) ∩ C(Ω) gilt
−∆u ≥ (≤) 0 in Ω,
so nimmt u sein Minimum (Maximum) auf dem Rande von Ω an.
Beweis: Sei zunachst −∆u > 0 in Ω und sei x0 ∈ Ω ein Punkt, in dem u sein Minimum annimmt.Dann ist die Hesse-Matrix D2u(x0) positiv semi-definit, also insbesondere Diiu(x0) ≥ 0. Dies ist aber einWiderspruch zu −∆u(x0) > 0.
Nun betrachten wir den Fall −∆u ≥ 0. Sei v(x) = exp(γx1) fur ein beliebiges γ 6= 0. Dann gilt
−∆v(x) = −γ2 exp(γx1) < 0.
Daher erhalten wir fur jedes ε > 0, daß −∆(u−εv) > 0. Nach dem ersten Teil des Beweises nimmt u−εvsein Minimum auf dem Rande an. In der Identitat
infx∈Ω
(u − εv) = minx∈∂Ω
(u − εv)
gehen wir nun zum Grenzwert ε→ 0 uber, sodaß der Satz vollstandig bewiesen ist.
Korollar 2.2 Klassische Losungen sind eindeutig.
Beweis: Wenn u1, u2 Losungen sind, so gilt fur v = u1 − u2
−∆v = 0 in Ω, v = 0 auf ∂Ω.
Aus dem Maximumprinzip folgt v = 0.
Korollar 2.3 (Inversmonotonie) Wenn fur u ∈ C2(Ω) ∩C(Ω) gilt
−∆u ≥ 0 in Ω, u ≥ 0 auf ∂Ω,
so folgt u ≥ 0 in Ω.
2.2 Differenzenverfahren
In diesem und den folgenden Abschnitten betrachten wir zweidimensionale Gebiete Ω.Das GitterGh ⊂ R2
besteht aus Punkten P der FormP = αh, α ∈ Z2.
Diese Punkte heißen Gitterpunkte. Eine Abbildung uh : Gh → R ist eine Gitterfunktion, der lineareRaum der Gitterfunktionen wird mit Vh bezeichnet. Den Teilraum der Gitterfunktionen, die außerhalbeiner Menge Ωh ⊂ Gh verschwinden, bezeichnen wir mit Vh(Ωh).
5

Auf Vh sind die Differenzenoperatoren
D+i uh(P ) =
1
h(uh(P + hei) − uh(P )) ′′vorwarts′′,
D−i uh(P ) =
1
h(uh(P ) − uh(P − hei))
′′ruckwarts′′,
D0i uh(P ) =
1
2h(uh(P + hei) − uh(P − hei))
′′zentral′′
erklart. Weiter sei−∆huh(P ) = −D+
1 D−1 uh(P ) −D+
2 D−2 uh(P ).
Da wir uns in zwei Raumdimensionen befinden, konnen wir Differenzenoperatoren in Form einerquadratischen Tafel schreiben. Die obigen Differenzenoperatoren sind Linearkombinationen von uh(Q) inPunkten Q in einer Umgebung von P und konnen daher in Form eines 3 × 3-Sterns geschrieben werden,zum Beispiel
D01uh =
1
2h
0 0 0
−1 0 1
0 0 0
.
Wegen
D+i D
−i uh(P ) = D+
i (1
h(uh(P ) − uh(P − hei))
=1
h2(uh(P − hei) − 2uh(P ) + uh(P + hei))
gilt
−∆huh =1
h2
0 −1 0
−1 4 −1
0 −1 0
.
Aufgrund dieses Sterns wird diese Approximation der Poisson-Gleichung auch 5-Punktestern (oder 7-Punktestern fur n = 3) genannt.
Nun wollen wir den Fehler messen, den wir in jedem Gitterpunkt machen, wenn wir einen Differen-tialoperator durch einen Differenzenoperator ersetzen.
Definition 2.4 Sei L =∑
|α|≤m aαDα ein Differentialoperator der Ordnung m. Ein Differenzenoperator
Lh ist von der Konsistenzordnung l, wenn
|Lu(P ) − Lhu(P )| ≤ chl fur alle u ∈ Cm+l,
wobei die Konstante c von u, aber nicht von h abhangen darf.
Man bestimmt die Konsistenzordnung mit Hilfe der Taylorentwicklung der Funktion u. Als Beispielbetrachten wir die 5-Punkte-Diskretisierung des Laplace-Operators −∆. Fur u ∈ C4 gilt fur i = 1, 2
u(P + hei) = u(P ) +Diu(P )h+1
2Diiu(P )h2 +
1
6Diiiu(P )h3 +O(h4)
u(P − hei) = u(P ) −Diu(P )h+1
2Diiu(P )h2 −
1
6Diiiu(P )h3 +O(h4)
und daher
−∆hu(P ) =1
h2
4u(P ) − u(P + he1) − u(P − he1) − u(P + he2) − u(P − he2)
= −∆u(P ) + h−2O(h4) = −∆u(P ) +O(h2).
Damit ist der 5-Punkestern von zweiter Ordnung konsistent. Fuhrt man eine Taylor-Entwicklung hohererOrdnung durch fur eine Funktion u ∈ C5, so stellt man fest, daß die Terme vierter Ordnung sich nichtgegenseitig aufheben. Daher ist −∆h nicht von dritter Ordnung konsistent.
6

Eine analoge Rechnung zeigt, daß D0i von zweiter und D
+(−)i von erster Ordnung konsistente Diskre-
tisierungen der partiellen Ableitungen Di sind.
Fig. 2.1
Das erste Randwertproblem mit g = 0 wird nun diskretisiert,indem −∆ durch −∆h ersetzt wird. Dazu definieren wir die dis-kreten Mengen
Ωh = Gh ∩ Ω,
∂Ωh = P ∈ Ωh : ∃Q ∈ Gh \ Ωh mit |P −Q| = h,
Ωh = Ωh \ ∂Ωh.
Im diskreten Problem suchen wir eine Gitterfunktion uh ∈ Vh(Ωh)mit
−∆huh(P ) = f(P ) fur alle P ∈ Ωh. (2.2)
Durch die Definition des Raumes Vh(Ωh) haben wir die Nullrandbedingung fur die diskrete Losungberucksichtigt. Die Punkte in Ωh konnen nun in beliebiger Reihenfolge numeriert werden, sodaß dieunbekannten Werte uh(P ) mit einem Vektor der Lange Nh = card (Ωh) identifiziert wird. Fur diesenunbekannten Vektor haben wir genau Nh lineare Gleichungen in (2.2) zur Verfugung. Also ist (2.2)aquivalent zu einem linearen Gleichungssystem der Dimension Nh, dessen Systemmatrix durch den Sterndes diskreten Operators −∆h vollstandig bestimmt ist. Um Irrtumern vorzubeugen, mochte ich anmerken,daß naturlich nicht der Stern das lineare Gleichungssystem ist, sondern zusammen mit der Numerierungdieses definiert.
Wir betrachten das folgende Beispiel. Sei Ω = (0, 1)2 und h = 14 . Ωh besteht dann aus al-
len Gitterpunkten Pi = (xi, yi) mit xi, yi ∈ j4 fur j = 1, 2, 3. Daher hat unser System 9 Un-
bekannte, die lexikographisch numeriert werden beginnend mit (1, 1). Die Systemmatrix ist dann
1 2 3
4 5 6
7 8 9
Fig. 2.2
Ah = 16
4 −1 0 −1 0 0 0 0 0
−1 4 −1 0 −1 0 0 0 0
0 −1 4 0 0 −1 0 0 0
−1 0 0 4 −1 0 −1 0 0
0 −1 0 −1 4 −1 0 −1 0
0 0 −1 0 −1 4 0 0 −1
0 0 0 −1 0 0 4 −1 0
0 0 0 0 −1 0 −1 4 −1
0 0 0 0 0 −1 0 −1 4
.
Die Systemmatrix ist also sehr schwach besetzt und symmetrisch.Im folgenden beweisen wir eine Abschatzung fur den Fehler u(P )−uh(P ). Obwohl die Konvergenzrate
in diesem Fall mit der Konsistenzordnung ubereinstimmt, mochte ich hier betonen, daß i.a. Konvergenznicht aus Konsistenz folgt. Spater werden wir Beispiele sehen, wo konsistente Verfahren nicht konvergieren.Zur Konvergenz benotigt man zusatzlich zur Konsistenz die Stabilitat des Verfahrens, also eine von hunabhangige Abschatzung der diskreten Losungen durch die Daten des Problems. In unserem Fall wirddie Stabilitat des Verfahrens durch ein diskretes Maximumprinzip gegeben, das nun definiert werden soll.
Definition 2.5 Ein Differenzenoperator Lh genugt dem diskreten Maximumprinzip auf Ωh, wenn
Lhuh(P ) ≥ 0 ∀P ∈ Ωh, uh(Q) ≥ 0 ∀Q ∈ ∂Ωh ⇒ uh(P ) ≥ 0 ∀P ∈ Ωh. (2.3)
Die Analogie zum kontinuierlichen Maximumprinzip aus Korollar 2.3 durfte klar sein.
Satz 2.6 −∆h genugt dem diskreten Maximumprinzip.
Beweis: Seien die Voraussetzungen des diskreten Maximumprinzips fur eine Gitterfunktion uh erfulltund sei P ′ ein Punkt mit uh(P ′) = minP∈Ωh
uh(P ). Nun gilt u(P ′) ≥ 14
∑
Q u(Q), wobei die Summesich uber die vier Nachbarpunkte Q von P ′ erstreckt. Dann sind aber auch die Nachbarpunkte von P ′
minimale Punkte von uh. Durch Iterieren dieses Arguments finden wir einen Punkt auf dem diskretenRande, der ebenfalls minimal ist. Daher uh(P ′) ≥ 0.
7

Offenbar kann dieser Beweis auf alle Differenzensterne ausgedehnt werden, deren Zentrum positiv ist,bei dem alle anderen Eintrage negativ sind und bei dem das Zentrum großer oder gleich der Summe derBetrage aller anderen Eintrage ist.
Wenn eine Differenzenapproximation fur alle h > 0 ein diskretes Maximumprinzip erfullt und dieLosungen der diskreten Probleme gegen die exakte Losung konvergieren, so wird auch der kontinuierlicheOperator ein Maximumprinzip erfullen. Daher ist die Beweismethode des folgenden Satzes auf spezielleDifferentialgleichungen beschrankt.
Satz 2.7 Sei u ∈ C4(Ω) die Losung von Problem (2.2). Dann gilt die Fehlerabschatzung
maxP∈Ωh
|(u− uh)(P )| ≤ chk,
wobei k = 1 im allgemeinen Fall und k = 2, wenn ∂Ωh ⊂ ∂Ω.
Beweis: Im ersten Schritt des Beweises konstruieren wir ahnlich zum Beweis des kontinuierlichenMaximumprinzips sogenannte Vergleichsfunktionen, das sind Gitterfunktionen wh mit
−∆hwh ≥ 1 in Ωh, wh ≥ 0 auf ∂Ωh, maxP∈Ωh
|wh| ≤ c1,
Wenn Ωh in der Kugel BR(0) enthalten ist, so erfullt die Funktion w(x) = 14 (−|x|2 +R2)
−∆w = 1 in BR(0), w ≥ 0 in BR(0), maxx∈Ω
|w(x)| ≤R2
4.
Fur die Gitterfunktion wh, die mit w in den Gitterpunkten ubereinstimmt, gilt auch −∆hwh = 1, denn−∆h und −∆ liefern auf quadratischen Polynomen das gleiche Resultat.
Aus der Konsistenz des Operators −∆h erhalten wir wegen −∆huh(P ) = f(P ) = −∆u(P ),
| − ∆huh(P ) + ∆hu(P )| ≤ c2h2,
und daher
−∆h(c2h2wh − (u− uh)) ≥ 0 in Ωh.
Im Falle ∂Ωh ⊂ ∂Ω gilt
c2h2wh − (u − uh) = c2h
2wh ≥ 0 auf ∂Ωh
und aus dem diskreten Maximumprinzip folgt
u− uh ≤ c2h2wh in Ωh.
Die Ungleichung fur −(u− uh) wird genauso bewiesen. Damit folgt der zweite Teil des Satzes aus
maxP∈Ωh
|u− uh|(P ) ≤ c2h2 max
P∈Ωh
|wh(P )| ≤ c2c1h2.
Im allgemeinen Fall verwenden wir die Vergleichsfunktion wh = c2h2wh + c3h, wobei die Konstante
c3 aus der Abschatzungmax
Q∈∂Ωh
|u(Q)| ≤ c3h
bestimmt wird. Der zusatzliche Term c3h garantiert, daß
wh − (u− uh) ≥ c3h− |u| ≥ 0 auf ∂Ωh.
Wiederum folgt die Behauptung aus dem diskreten Maximumprinzip.Das allgemeinere Problem (2.1) mit g 6= 0 kann analog diskretisiert werden, indem man sich in denPunkten auf ∂Ωh diskrete Werte mit Hilfe der Randfunktion g verschafft (= lokalkonstante Interpolation).
8

2.3 Lineare Finite Elemente
Wir definieren nun das einfachste Finite Elemente Verfahren zur Approximation der Gleichung (2.1) mitg = 0. Dazu unterteilen wir Ω in abgeschlossene Dreiecke Λ, Ωh = ∪Λ, sodaß die folgende Bedingungerfullt ist:
Fig. 2.3
Bedingung R: Der Durchschnitt zweier Dreiecke ist leeroder besteht aus einer gemeinsamen Kante oder einem ge-meinsamen Eckpunkt. Die Eckpunkte auf ∂Ωh sind in ∂Ωenthalten. Jedes Dreieck enthalt einen Kreis vom Radiusc−1R h und ist in einem Kreis vom Radius cRh enthalten,
wobei die Konstante cR unabhangig von der Schrittweite hist.Diese Bedingung schließt Degenerierungen der Dreiecke furh→ 0 aus, insbesondere sind die Innenwinkel der Dreieckenach unten beschrankt durch ein α > 0 und nach obendurch ein β < π.
Fur konvexes Ω gilt offenbar Ωh ⊂ Ω. In all unseren Abschatzungen darf die generische Konstante cvon cR, aber nicht vom Diskretisierungsparameter h abhangen.
Der einfachste Finite Elemente Raum ist definiert durch
S0 =
vh ∈ C(Ωh) : vh|Λ ist linear und vh|∂Ωh= 0
.
Wir setzen zunachst Ω = Ωh voraus, was man fur jedes polygonale Gebiet Ω erreichen kann. Der allge-meine Fall wird spater behandelt. Die Finite Elemente Methode ist dann definiert durch:
Gesucht ist uh ∈ S0 mit (Duh, Dvh) = (f, vh) fur alle vh ∈ S0. (2.4)
Um diese Losung tatsachlich zu berechnen, benotigt man eine Basis ϕh,i des Raumes S0. Wir entwickeln
uh nach dieser Basis, uh =∑N
j=1 cjϕh,j , und setzen dies in (2.4) ein,
N∑
j=1
(cjDϕh,j , Dϕh,i) = (f, ϕh,i), i = 1, . . . , N.
Dies ist aquivalent zum linearen Gleichungssystem
Ac = b (2.5)
mitA = (aij), aij = (Dϕh,j , Dϕh,i) ”Steifigkeitsmatrix”,
c = (cj) Losungsvektor,
b = (bi), bi = (f, ϕh,i) ”Lastvektor”.
Fig. 2.4
Die naturliche oder nodale Basis des Raumes S0 laßt sichfolgendermaßen konstruieren. Seien P1, . . . , PN die Eckpunkteder Triangulierung Λ, die im Inneren von Ω liegen, und seienϕh,i ∈ S0 Funktionen mit
ϕh,i(Pj) = δij ,
wobei δij das Kroneckersche δ bedeutet. Da jede Spline Funktiondurch ihre Werte an den inneren Eckpunkten und die Nullrandbe-dingung eindeutig bestimmt ist, sind die ϕh,i eindeutig. Aus demgleichen Grunde bilden die ϕh,ii=1,...,N eine Basis des RaumesS0 und jedes vh ∈ S0 kann in der Form
vh(x) =
N∑
i=1
vh(Pi)ϕh,i(x)
9

dargestellt werden. Daher ist die Dimension des Raumes S0 durch die Anzahl der inneren Eckpunktegegeben. Der Trager eines jeden ϕh,i besteht aus den Dreiecken adjazent zu Pi, sodaß (Dϕh,i, Dϕh,j)verschwindet, wenn die Punkte Pi, Pj kein gemeinsames Dreieck haben. Wenn ein Eckpunkt Pi Ni Nach-barpunkte besitzt, dann enthalt die i-te Zeile von A in (2.5) nicht mehr als Ni + 1 nichtverschwindendeElemente, demnach ist die Matrix schwach besetzt.
Fig. 2.5
Wir betrachten die Triangulierung des Einheitsqua-drats aus Fig. 2.5. Ahnlich wie beim Differenzenverfahrenkann man das Finite Elemente Verfahren durch einenDifferenzenstern in jedem Gitterpunkt beschreiben. Durcheine elementare Rechnung erhalten wir
0 −1 0
−1 4 −1
0 −1 0
.
Abgesehen von der anderen Skalierung stimmt die System-matrix mit dem Funfpunktestern uberein. Die Bestimmung
der rechten Seite (f, ϕi) ergibt nur eine geringe Abweichung von h2f(Pi), die uberdies durch Verwendungeiner Kubaturformel, wie sie spater beschrieben wird, beseitigt werden kann. Fur rechteckige Gebietebleibt also die Konvergenztheorie des Differenzenverfahrens auch fur die Finite Elemente Methode richtig.
Wir fahren mit der Analyse des Finite Elemente Verfahrens (2.4) fur das Problem (2.1) fort. Aus derFormel der partiellen Integration folgt fur jede Funktion vh ∈ S0
∫
Ω
−∆uvh dx =∑
Λ
∫
Λ
−∆uvh dx =∑
Λ
∫
Λ
DuDvh dx−∑
Λ
∫
∂Λ
nDuvh ds.
wobei n der nach außen gerichtete Normaleneinheitsvektor von ∂Λ ist. In den Randintegralen auf derrechten Seite kommt jede im Inneren von Ω gelegene Kante genau zweimal vor, wobei die zugehorigenNormaleneinheitsvektoren entgegengesetztes Vorzeichen besitzen. Da auf den Randkanten die Funktionvh verschwindet, sind samtliche Randintegrale Null und wir haben gezeigt, daß die klassische Losung derIdentitat
(Du,Dvh) = (f, vh) ∀vh ∈ S0
genugt, sofern diese Integrale existieren. Durch Subtraktion mit der Verfahrensgleichung (2.4) erhaltenwir daraus die Orthogonalitatsrelation
(Du −Duh, Dvh) = 0 ∀vh ∈ S0. (2.6)
Diese liefert mit der einfachen Abschatzung
‖Du−Duh‖22 = (Du−Duh, Du−Duh) = (Du−Duh, Du−Dvh)
≤ ‖Du−Duh‖2‖Du−Dvh‖2
die fundamentale Identitat‖Du−Duh‖2 = inf
vh∈S0
‖Du−Dvh‖2. (2.7)
Wir konnen also eine Fehlerabschatzung im quadratischen Mittel fur den Gradienten gewinnen, indemwir auf der rechten Seite eine spezielle Approximation vh von u einsetzen.
Fur u ∈ C(Ω) definieren wir die Interpolierende Ihu ∈ S0 durch
Ihu(x) =∑
i
u(Pi)ϕh,i(x).
Die Interpolierende ist die eindeutig bestimmte Spline Funktion, die mit u in den inneren Knotenpunktenubereinstimmt und am Rande von ∂Ω verschwindet.
Satz 2.8 Sei fur das Dreieck Λ die Bedingung R erfullt. Fur u ∈ C2(Λ) gilt die Fehlerabschatzung
‖Du−DIhu‖22;Λ ≤ ch2µ(Λ)‖D2u‖2
∞;Λ,
wobei die Konstante c nicht von h, aber von cR aus Bedingung R abhangt. µ(Λ) ist das Maß von Λ.
10

Beweis: Mit P1, P2, P3 bezeichnen wir die Eckpunkte von Λ und mit e1, e2, e3 die Richtungen dergegenuberliegenden Kanten. Mit v = u − Ihu gilt v(Pi) = 0. Nach dem Mittelwertsatz gibt es einenPunkt x auf der P1 gegenuberliegenden Kante mit De1
v(x) = 0. Aus dem Mittelwertsatz fur De1v folgt
daraus die Abschatzung
|De1v(y)| = |De1
v(y) −De1v(x)| ≤ ch‖D2v‖∞;Λ = ch‖D2u‖∞;Λ in Λ.
Da furDe2v die gleiche Abschatzung gilt und aufgrund von Bedingung (R) die Vektoren e1, e2 gleichmaßig
linear unabhangig sind, erhalten wir
|Dv| ≤ c|De1v| + |De2
v| ≤ ch‖D2u‖∞;Λ. (2.8)
Die Behauptung folgt nun durch Quadrieren und Integrieren dieser Beziehung.Verbesserte Abschatzungen fur den Interpolationsfehler werden im 4. Kapitel bewiesen.
Aus diesem Beweis konnen wir entnehmen, daß zumindestens fur den hier vorliegenden Fall der stuck-weisen linearen Elemente die Bedingung R zu einschrankend ist. Es ist vollig ausreichend, daß das DreieckΛ Durchmesser cRh besitzt und der großte Innenwinkel von π wegbeschrankt ist. In diesem Fall gibt eszwei Kantenrichtungen e1, e2, sodaß Abschatzung (2.8) richtig ist mit einer Konstanten c, die nur vomgroßten Innenwinkel abhangt.
(-h, 0) (h, 0)
a
Fig. 2.6
Von der Bedingung an den großten Innenwinkel kannman jedoch nicht abgehen, wie das folgende Beispiel zeigt.Wir betrachten das Dreieck mit den Eckpunkten P1 =(−h, 0), P2 = (h, 0) und P3 = (0, a). Fur a << h hatdieses Dreieck im Punkt P3 einen großen Innenwinkel. Furdie lineare Interpolierende Ihu der Funktion u(x1, x2) = x2
1
gilt D2Ihu = −h2/a, wegen D2u = 0 also
D2(u− Ihu) =h2
a→ ∞ fur a→ 0.
Fur andere Finite Elemente, wie sie im 3. Kapitel vorgestellt werden, konnen die Verhaltnisse jedochkomplizierter sein (s. [3]).
Fur genugend glatte Losungen erhalten wir aus (2.7) und aus dem gerade bewiesenen Satz durchSummation uber Λ, daß
‖Du−Duh‖2;Ω ≤ ch.
Das Verfahren konvergiert also linear im quadratischen Mittel des Gradienten.
11

3 Hilbertraummethode und Ritzsches Verfahren
3.1 Das Fundamentallema der Variationsrechnung
Wie zuvor bezeichnen wir mit L1loc(Ω) den Raum der meßbaren Funktionen u, die auf jeder Menge
Ω0 ⊂⊂ Ω integrierbar sind.
Satz 3.1 (Fundamentallemma der Variationsrechnung) Sei u ∈ L1loc(Ω) mit
∫
Ω
uϕdx ≥ 0 fur alle ϕ ∈ C∞0 (Ω) mit ϕ ≥ 0. (3.1)
Dann ist u ≥ 0 f.u. in Ω.
Bemerkung 3.2 Wenn∫
Ωuϕdx ≥ 0 fur alle ϕ ∈ C∞
0 (Ω), dann gilt∫
Ωuϕdx = 0, und damit
∫
Ω
uϕdx ≥ 0 fur alle ϕ ∈ C∞0 (Ω) ⇒ u = 0 f.u. in Ω. (3.2)
Beweis: Wir beweisen den Satz nur fur stetiges u. Angenommen, es gibt einen Punkt x0 ∈ Ω mitu(x0) < 0. Da u stetig ist, gibt es eine Umgebung Bε(x0) mit u(x) < 0 fur alle x ∈ Bε(x0). Es gibt eineFunktion ϕ ∈ C∞
0 (Bε(x0)) mit ϕ ≥ 0, ϕ 6= 0. Daher∫
Ω uϕdx < 0, was∫
Ω uϕdx ≥ 0 widerspricht.
3.2 Schwache Ableitungen
Die Definition der klassischen Ableitung erscheint in vielen Fallen als zu streng. Zum Beispiel ist dieFunktion u(x) = |x| ”nahezu” differenzierbar und es ist naheliegend, hier einfach u′(x) = sign (x) zusetzen. Nur die Definition der Ableitung im Punkte x = 0 ist hier beliebig, aber der Fundamentalsatz derDifferential- und Integralrechnung bleibt richtig, |x| =
∫ x
0sign (ξ) dξ. Trotzdem muß man vorsichtig sein:
Die Definition (sign (x))′ = 0 ware inkonsistent wegen sign (x) 6=∫ x
0 0 dξ.In hoheren Raumdimensionen kann man den Begriff der Differenzierbarkeit mit der Formel der par-
tiellen Integration verallgemeinern,
∫
Ω
uDαϕdx = (−1)|α|
∫
Ω
Dαuϕdx fur alle ϕ ∈ C∞0 (Ω),
was fur alle u ∈ C|α|(Ω) richtig ist.Diese Uberlegungen motivieren die folgende Definition.
Definition 3.3 Eine Funktion u ∈ L1loc(Ω) besitzt eine α-te schwache Ableitung in Ω, wenn es eine
Funktion uα ∈ L1loc(Ω) gibt mit
∫
Ω
uDαϕdx = (−1)|α|
∫
Ω
uαϕdx fur alle ϕ ∈ C∞0 (Ω).
Wegen des folgenden Lemmas unterscheiden wir zwischen schwacher und klassischer Ableitung nicht undschreiben Dαu an Stelle von uα.
Lemma 3.4 Die schwache Ableitung ist eindeutig, sofern sie existiert. Wenn eine Funktion klassischdifferenzierbar ist, so ist sie auch schwach differnzierbar und beide Ableitungen stimmen uberein.
Beweis: Wenn uα und u′α schwache Ableitungen von u sind, so erhalten wir aus der Definition
∫
Ω
(uα − u′α)ϕdx = 0 fur alle ϕ ∈ C∞0 (Ω).
Aus dem Fundamentallemma folgt uα = u′α. Die zweite Behauptung ergibt sich aus der Motivation zuAnfang dieses Abschnitts.
12

Beispiel 3.5 Wir betrachten den Fall n = 1, Ω = (−1, 1), u(x) = |x|. Aus der Formel der partiellenIntegration erhalten wir
∫ 1
−1
uϕ′ dx =
∫ 0
−1
−xϕ′(x) dx +
∫ 1
0
xϕ′(x) dx
=
∫ 0
−1
ϕ(x) dx − 0ϕ(0) − 1ϕ(−1) +
∫ 1
0
−ϕ(x) dx + 1ϕ(1) − 0ϕ(0)
= −
∫ 1
−1
sign (x)ϕ(x) dx,
wobei wir ϕ(−1) = ϕ(1) = 0 wegen ϕ ∈ C∞0 (Ω) verwenden konnten. Damit ist bewiesen, daß |x| schwach
differenzierbar ist mit Ableitung sign (x).Nun versuchen wir, |x| ein weiteres Mal zu differenzieren
∫ 1
−1
sign (x)ϕ′(x) dx =
∫ 0
−1
ϕ′(x) dx +
∫ 1
0
ϕ′(x) dx = −2ϕ(0).
Es gibt offenbar kein f ∈ L1loc mit (f, ϕ) = −2ϕ(0). Damit existiert die zweite schwache Ableitung von
|x| nicht.
Beispiel 3.6 In diesem Beispiel untersuchen wir Funktionen mit einer Singularitat in einem isoliertenPunkt. Sei n = 2, Ω = B1(0) und uα(x) = |x|α, α ∈ R. Mit Hilfe von Polarkoordinaten erhalten wir
∫
B1(0)
uα(x) dx = 2π
∫ 1
0
rα+1 dr,
und uα ∈ L1(B1(0)) fur α > −2. Wegen Lemma 3.4 ist uα schwach differenzierbar in B1(0) \ 0 mitAbleitung Duα = αrα−2x. Mit partieller Integration folgt fur beliebiges ϕ ∈ C∞
0 (B1(0))
∫
B1(0)\Bε(0)
uα(x)Dϕ(x) dx = −
∫
B1(0)\Bε(0)
Duα(x)ϕ(x) dx −
∫
∂Bε(0)
nuα(x)ϕ(x) ds.
Fur α > −1 besitzen die Integranden die integrierbaren Majoranten |uαDkϕ| sowie |Dkuαϕ|. Mit demSatz von Lebesgue konnen wir fur die Integrale auf B1(0)\Bε(0) den Grenzubergang ε→ 0 durchfuhren.Die Randintegrale werden abgeschatzt durch
∣
∣
∣
∫
∂Bε(0)
nuα(x)ϕ(x)ds∣
∣
∣ ≤ ‖ϕ‖∞
∫
∂Bε(0)
εα ds ≤ ‖ϕ‖∞2πεα+1 → 0.
Damit ist uα schwach differenzierbar fur α > −1.
Der nachste Satz verallgemeinert das Beispiel 3.5.
Satz 3.7 Sei Ωkk=1,...,K eine Partition von Ω in stuckweise glatte Teilgebiete, also Ω = ∪Kk=1Ωk,
Ωk ∩Ωl = ∅ fur k 6= l. Sei u ∈ C(Ω) mit u ∈ C1(Ωk) fur k = 1, . . . ,K. Dann ist u schwach differenzierbarmit beschrankter Ableitung, die auf ∪Ωk mit der klassischen Ableitung ubereinstimmt und beliebig ist auf∪∂Ωk.
Beweis: Fur ϕ ∈ C∞0 (Ω) folgt mit partieller Integration
∫
Ω
uDϕdx =
K∑
k=1
∫
Ωk
uDϕdx = −K∑
k=1
∫
Ωk
Duϕdx +
K∑
k=1
∫
∂Ωk
nuϕds.
Die Randintegrale heben sich in dieser Formel gegenseitig auf, weil die außeren Normaleneinheitsvek-toren bei benachbarten Teilgebieten entgegengesetztes Vorzeichen haben und weil ϕ am Rande von Ωverschwindet. Daher
∫
Ω
uDϕdx = −K∑
k=1
∫
Ωk
Duϕdx = −
∫
Ω
Duϕdx.
13

Nun stellen wir einige einfache Rechenregeln fur schwache Ableitungen auf.
– Wenn u eine schwache Ableitung Dαu in Ω besitzt, so ist u auch schwach differenzierbar in jedemGebiet Ω0 ⊂ Ω mit gleicher Ableitung.
– Wenn Dαu eine schwache Ableitung Dβ(Dαu) besitzt, so existiert die Ableitung Dα+βu ebenfalls undDα+βu = Dβ(Dαu).
– Die schwache Ableitung ist eine lineare Operation im Raum der schwach differenzierbaren Funktionen.
Als kleine Ubung beweisen wir die zweite Behauptung. Aus den beiden Identitaten
∫
Ω
uDαϕdx = (−1)|α|
∫
Ω
Dαuϕdx fur alle ϕ ∈ C∞0 (Ω),
∫
Ω
DαuDβψ dx = (−1)|β|∫
Ω
Dβ(Dαu)ψ dx fur alle ψ ∈ C∞0 (Ω),
erhalten wir mit ϕ = Dβψ
∫
Ω
uDα+βψ dx = (−1)|α+β|
∫
Ω
Dβ(Dαu)ψ dx.
3.3 Die Sobolev Raume
Mit Hilfe des Begriffs der schwachen Ableitung konnen wir Banach Raume definieren, die das Konzeptder Lebesgue Raume auf differenzierbare Funktionen ubertragen.
Definition 3.8 Fur m ∈ N0 und 1 ≤ p ≤ ∞ besteht der Raum Hm,p(Ω) aus allen Funktionen u ∈ Lp(Ω),die m-mal schwach differenzierbar sind mit Ableitungen im Raum Lp(Ω). Die Raume Hm,p(Ω) werdenmit den Sobolev Normen
‖u‖m,p;Ω := ‖u‖m,p :=(
∑
0≤|α|≤m
‖Dαu‖pp
)1/p
, 1 ≤ p <∞,
‖u‖m,∞;Ω := ‖u‖m,∞ := max0≤|α|≤m
‖Dαu‖∞
versehen.
Offenbar ist H0,p = Lp. Die Normaxiome lassen sich einfach nachweisen.
Satz 3.9 Hm,p(Ω) ist Banach Raum fur alle m ∈ N0 und 1 ≤ p ≤ ∞.
Beweis: Sei ukk∈N eine Cauchy-Folge in Hm,p(Ω). Aufgrund der Definition der Sobolev Norm ist dieFolge Dαukk∈N eine Cauchy-Folge in Lp(Ω) fur alle 0 ≤ |α| ≤ m und besitzt wegen der Vollstandigkeitvon Lp(Ω), einen Grenzwert uα ∈ Lp(Ω). Aus
∫
Ω
ukDαϕdx = (−1)|α|
∫
Ω
Dαukϕdx fur alle ϕ ∈ C∞0 (Ω)
folgt ∫
Ω
uDαϕdx = (−1)|α|
∫
Ω
uαϕdx fur alle ϕ ∈ C∞0 (Ω),
wobei wir die Tatsache verwendet haben, daß Dαuk → uα in L1(Ω0), Ω0 = supp(ϕ) ⊂⊂ Ω. Aus derletzten Identitat erhalten wir Dαu = uα und daher uk → u in Hm,p(Ω).
Korollar 3.10 Hm,2(Ω) ist Hilbert Raum mit innerem Produkt
(u, v)m =∑
|α|≤m
∫
Ω
DαuDαv dx.
Nun kommen die Hauptresultate.
Satz 3.11 (Meyers und Serrin [15]) C∞(Ω) ∩Hm,p(Ω) ist dicht in Hm,p(Ω) fur 1 ≤ p <∞.
Satz 3.12 Fur genugend glatt berandetes Ω liegt auch C∞(Ω) dicht in Hm,p(Ω) fur 1 ≤ p <∞.
14

Beide Satze gestatten damit, Sobolev Funktionen durch klassisch differenzierbare Funktionen zu appro-ximieren. Dadurch lassen sich viele klassische Formeln auf Sobolev Funktionen ubertragen. Als einfachesBeispiel betrachten wir die Produktregel
Di(uv) = Diu v + uDiv, (3.3)
die fur alle Funktionen u, v ∈ H1,2(Ω) richtig ist. Zum Beweis wahlen wir Folgen uk, vk in C∞(Ω)∩H1,2(Ω) mit uk → u, vk → v. In der Identitat
∫
Ω
ukvkDiϕdx = −
∫
Ω
Diuk vk + uk Divkϕdx, ϕ ∈ C∞0 (Ω),
konnen wir, da sowohl L2-Konvergenz fur u, v als auch fur Diu,Div vorliegt, zum Grenzwert k → ∞ubergehen und erhalten gerade die Formel (3.3).
3.4 Sobolev-Ungleichungen
Da man bei Sobolev Funktionen in Hm,p auch uber Bedingungen fur die schwachen Ableitungen verfugt,ist es nicht verwunderlich, daß sie bessere Integrierbarkeits- und manchmal auch Stetigkeitseigenschaf-ten besitzen. Wir erhalten damit Einbettungen in die Raume Lq(Ω) und C(Ω), die unter dem NamenSobolev-Ungleichungen zusammengefaßt werden. Damit diese Einbettungen richtig sind, benotigt maneine geringfugige Voraussetzung an den Rand des Gebietes Ω. Wir sagen, daß Ω die Kegeleigenschaftbesitzt, wenn ein Kegel K mit nichtleerem Inneren existiert, sodaß es zu jedem x ∈ ∂Ω einen zu Kkongruenten Kegel K(x) gibt mit K(x) ⊂ Ω. Offenbar besitzt jedes Gebiet mit genugend glattem Randdie Kegeleigenschaft, dagegen ist sie fur ein herzformiges Gebiet mit nach außen gezogener Spitze nichterfullt.
Satz 3.13 Das Gebiet Ω ⊂ Rn besitze die Kegeleigenschaft. Sei m ∈ N, 1 ≤ p <∞.
(i) Falls mp < n, liegt jede Funktion u ∈ Hm,p(Ω) auch im Raum Lq(Ω) mit q = np/(n−mp) und es giltdie Abschatzung
‖u‖q;Ω ≤ ‖u‖m,p;Ω ∀u ∈ Hm,p(Ω).
(ii) Falls mp > n, so laßt sich jedes u ∈ Hm,p(Ω) auf einer Menge vom Maß Null so abandern, daß dannu ∈ Ck(Ω) fur 0 ≤ k < m− n
p gilt und die Abschatzung
‖u‖k,∞;Ω ≤ c‖u‖m,p;Ω ∀u ∈ Hm,p(Ω) (3.4)
erfullt ist.
Bemerkung 3.14 Der Fall mp = n ist im vorliegenden Satz nicht berucksichtigt worden. Da Ω bei unsimmer als beschrankt vorausgesetzt wird, konnen wir (i) fur jedes p′ < p anwenden und folgern daraus,daß u ∈ Lq(Ω) fur jedes q <∞. Das impliziert i.a. nicht u ∈ L∞(Ω), wie das Beispiel n = 1, u = lnx zeigt.In manchen Fallen kann man auch bei mp = n die Stetigkeit von u zeigen, was wir an Hand eines kleinenBeweisbeispiels demonstrieren wollen. Sei n = 1 und Ω = (0, 1). Wir zeigen, daß jedes u ∈ H1,1(Ω) einenVertreter in C(Ω) besitzt, der der Abschatzung (3.4) genugt. Aus dem Hauptsatz der Differential- undIntegralrechnung folgt
|u(x)| =∣
∣
∣u(y) +
∫ y
x
u′(ξ) dξ∣
∣
∣ ≤ |u(y)| +
∫ 1
0
|u′(ξ)| dξ
und nach Integrieren bezuglich y,
|u(x)| ≤
∫ 1
0
|u(ξ)| + |u′(ξ)| dξ,
was gerade die Abschatzung (3.4) ist. Nach Satz 3.12 konnen wir jede Funktion u in H1,1(Ω) durchFunktionen uk in C∞(Ω) approximieren. Wegen (3.4) gilt dann
‖uk − ul‖∞;Ω ≤ c‖uk − ul‖1,1;Ω → 0 fur k, l → ∞.
Damit ist uk Cauchy-Folge in C(Ω) und konvergiert gegen den stetigen Vertreter u ∈ C(Ω).
15

3.5 Randwerte von Sobolev Funktionen und die Raume Hm,p
0 (Ω)
Einer Sobolev Funktion Randwerte zuordnen zu wollen, scheint der Definition dieser Funktionen zu wi-dersprechen, da sie ja nur bis auf eine Menge vom Maß Null definiert sind. Um diese Schwierigkeit zu um-gehen, gehen wir vom klassischen Spuroperator aus, der auf Raumen stetig differenzierbarer Funktionendefiniert ist. Fur genugend glatt berandetes Ω erzeugt jedes u ∈ Cm(Ω) eine Spur Tu = u|∂Ω ∈ Cm(∂Ω).Fur 1 ≤ p <∞ laßt sich fur diesen Spuroperator leicht die Abschatzung
‖Tu‖m−1,q;∂Ω ≤ c‖u‖m,p;Ω mit q =(n− 1)p
n− pfur p < n (3.5)
beweisen. Nach Satz 3.12 laßt sich jedes u ∈ Hm,p(Ω) durch eine Folge uk ∈ C∞(Ω)) approximieren. DieseFolge ist eine Cauchy-Folge in Hm,p(Ω), sodaß Abschatzung (3.5) angewendet auf uk − ul ergibt, daß dieFolge Tuk auch eine Cauchy-Folge bezuglich Hm−1,q(∂Ω) ist. Den zugehorigen Grenzwert dieser Folgebezeichnen wir mit Tu ∈ Hm−1,q(∂Ω) und nennen ihn die Spur von u. Tu ist bis auf eine Nullmenge des(n − 1)-dimensionalen Maßes unabhangig von der gewahlten Folge uk und daher eindeutig bestimmt.Genauer haben wir den folgenden Satz.
Satz 3.15 (Spursatz) Sei ∂Ω ∈ Cm, m ∈ N, 1 ≤ p <∞. Dann gibt es einen stetigen linearen OperatorT : Hm,p(Ω) → Hm−1,q(∂Ω) mit
q =
(n− 1)p/(n− p) fur p < n
<∞ fur p = n,
∞ fur p > n
und T : Cm(Ω) → Cm(∂Ω), Tu = u|∂Ω fur u ∈ Cm(Ω).
Die Bilder von T (=Randwerte) haben ahnliche Eigenschaften wie die Randwerte klassischer Funk-tionen. Als ein Beispiel betrachten wir das Divergenztheorem, das besagt, daß fur stetig differenzierbarevektorwertige Funktionen u = (u1, . . . , un)
∫
Ω
divudx =
∫
∂Ω
n · uds (3.6)
gilt. Fur genugend glatt berandetes Ω zeigen wir die Gultigkeit dieser Formel fur Funktionen im RaumH1,1(Ω)n. Fur u ∈ H1,1(Ω)n gibt es wegen Satz 3.12 Funktionen uε ∈ C1(Ω)n mit ‖u− uε‖1,1;Ω ≤ ε. Mit(3.5) gilt ‖Tu− Tuε‖1;∂Ω ≤ εc, woraus die Gultigkeit von (3.6) im Raum H1,1(Ω) folgt.
Fur 1 ≤ p < ∞ bezeichnen wir mit Hm,p0 (Ω) den Abschluß von C∞
0 (Ω) in der Norm von Hm,p(Ω).Nach dem letzten Abschnitt gilt dann Dαu = 0 fast uberall auf ∂Ω fur |α| ≤ m− 1.
Satz 3.16 (Poincare-Ungleichung) Fur alle u ∈ H1,20 (Ω) gilt die Abschatzung
‖u‖2;Ω ≤ c‖Du‖2;Ω.
wobei die Konstante c nur von Ω abhangt.
Beweis: Da nach Definition C∞0 (Ω) dicht in H1,2
0 (Ω) ist, genugt es, die Behauptung fur alle Funktionenin C∞
0 (Ω) zu beweisen. Sei Ω im Wurfel (0, d)n enthalten. Fur eine eindimensionale Funktion f : (0, d) →R mit f(0) = 0 folgt aus dem Hauptsatz der Differential- und Integralrechung
f(t) =
∫ t
0
f ′(ξ) dξ.
In dieser Identitat setzen wir Betrage und schatzen mit der Cauchy-Ungleichung ab
|f(t)|2 ≤∣
∣
∣
∫ t
0
f ′(ξ) dξ∣
∣
∣
2
≤ d
∫ d
0
|f ′(ξ)|2 dξ.
Diese Abschatzung wird nun bezuglich t integriert, sodaß die eindimensionale Poincare-Ungleichung be-wiesen ist. Im n-dimensionalen Fall schreiben wir u(x) = u(x1, x
′) und erhalten aus dem eindimensionalenResultat
∫ d
0
|u(x1, x′)|2 dx1 ≤ d2
∫ d
0
|D1u(x1, x′)|2 dx1.
Integration bezuglich x′ liefert die Behauptung.
16

3.6 Die Darstellungssatze von Riesz und Lax-Milgram
Sei V ein Hilbert Raum mit innerem Produkt a(·, ·) und Norm ‖v‖V = a(v, v)1/2.
Satz 3.17 (Rieszscher Darstellungssatz) Zu jedem stetigen linearen Funktional f ∈ V ′ gibt es eineindeutig bestimmtes u ∈ V mit
a(u, v) = f(v) fur alle v ∈ V. (3.7)
u ist auch die eindeutig bestimmte Losung des Variationsproblems
F (v) =1
2a(v, v) − f(v) → Min fur alle v ∈ V.
Beweis: Als erstes zeigen wir die Existenz einer Losung des Variationsproblems. Wegen der Stetigkeitvon f gilt die Abschatzung |f(v)| ≤ c‖v‖V und daher
F (v) ≥1
2‖v‖2
V − c‖v‖V ≥ −1
2c2.
Damit ist das Funktional F nach unten beschrankt und
d = infv∈V
F (v)
existiert. Sei vkk∈N eine Minimalfolge, also F (vk) → d fur k → ∞. Aus der Parallelogrammgleichung
‖vk − vl‖2V + ‖vk + vl‖
2V = 2‖vk‖
2V + 2‖vl‖
2V
erhalten wir
‖vk − vl‖2V =2‖vk‖
2V + 2‖vl‖
2V − 4‖
vk + vl
2‖2
V
− 4f(vk) − 4f(vl) + 8f(vk + vl
2)
= 4F (vk) + 4F (vl) − 8F (vk + vl
2)
≤4F (vk) + 4F (vl) − 8d → 0 fur k, l → ∞.
Damit ist vk eine Cauchy Folge, die wegen der Vollstandigkeit von V einen Grenzwert u ∈ V besitzt.Da F stetig ist, ist u eine Losung des Variationsproblems.
Nun zeigen wir, daß jede Losung des Variationsproblems auch eine Losung von (3.7) ist. Fur einMinimum u setzen wir
Φ(ε) = F (u+ εv) = F (u) + εa(u, v) − f(v) +1
2ε2a(v, v).
Da u das Variationsproblem minimiert, besitzt die Funktion Φ ein Minimum an der Stelle ε = 0. Daher
0 = Φ′(0) = a(u, v) − f(v) fur alle v ∈ V.
Seien nun u1, u2 zwei Losungen des Problems (3.7). Dann erhalten wir aus der Differenz der beidenGleichungen
a(u1 − u2, v) = 0 fur alle v ∈ V.
Aus v = u1 − u2 folgt u1 = u2. Die Losung des Variationsproblems ist eindeutig wegen der Eindeutigkeitvon (3.7).
Nun beweisen wir eine Verallgemeinerung des letzten Satzes auf unsymmetrische Bilinearformen. Seib(·, ·) eine Bilinearform auf V, die als beschrankt und positiv definit vorausgesetzt wird,
|b(u, v)| ≤ c‖u‖V ‖v‖V , b(u, u) ≥ m‖u‖2V fur alle u, v ∈ V,
wobei c,m > 0 unabhangig von u, v gewahlt werden konnen.
Satz 3.18 (Lax-Milgram) Sei b(·, ·) eine beschrankte und positiv definite Bilinearform auf dem HilbertRaum V. Zu jedem beschrankten linearen Funktional f ∈ V ′ gibt es genau ein u ∈ V mit
b(u, v) = f(v) fur alle v ∈ V. (3.8)
17

Beweis: Mit Hilfe des Darstellungssatzes von Riesz konnen wir Operatoren T, T ′ : V → V definierendurch
a(Tu, v) = b(u, v) ∀v ∈ V, a(T ′u, v) = b(v, u) ∀v ∈ V. (3.9)
Da b(u, ·) und b(·, u) stetige lineare Funktionale auf V sind, existieren Tu, T ′u und sind eindeutig be-stimmt. Weil die Operatoren der Bedingung a(Tu, v) = a(u, T ′v) genugen, nennen wir T ′ den adjungiertenOperator zu T. Wir setzen v = Tu in (3.9) ein und erhalten aus der Beschranktheit von b
‖Tu‖2V = a(Tu, Tu) = b(u, Tu) ≤ c‖Tu‖V ‖u‖V ,
also ‖Tu‖V ≤ c‖u‖V , was aufgrund der Linearitat von T die Stetigkeit von T impliziert. Mit dem gleichenArgument ist auch T ′ stetig.
Die Eindeutigkeit von u wird genauso wie im symmetrischen Fall bewiesen. Mit Hilfe der in (3.9)definierten Operatoren setzen wir
d(u, v) = a(TT ′u, v) = a(T ′u, T ′v) fur alle u, v ∈ V.
Die Form d ist bilinear, symmetrisch und genugt der Abschatzung
m2‖v‖4V ≤ b(v, v)2 = a(v, T ′v)2 ≤ ‖v‖2
V ‖T ′v‖2V = ‖v‖2
V d(v, v).
Daher ist d positiv definit und erzeugt ein inneres Produkt auf V mit d(v, v)1/2 aquivalent zu ‖v‖V . Ausdem Rieszschen Darstellungssatz erhalten wir ein w ∈ V mit
d(w, v) = f(v) fur alle v ∈ V.
Offenbar ist u = T ′w die Losung von (3.8).
3.7 Existenz schwacher Losungen
Die Existenzsatze des letzten Abschnitts werden nun angewendet auf das erste Randwertproblem derPoisson Gleichung
−∆u = f in Ω, u = 0 auf ∂Ω. (3.10)
Da in dieser Problemstellung die abstrakte Theorie nicht greift, fuhren wir das Konzept der schwachenLosung ein. Wir multiplizieren (3.10) mit v ∈ H1,2
0 (Ω) und fuhren eine partielle Integration durch,
(Du,Dv) = (f, v) fur alle v ∈ H1,20 (Ω).
Ahnlich wie beim Finite Elemente Verfahren braucht in dieser Darstellung u nur einmal (schwach) diffe-renzierbar zu sein. Um auch die Nullrandbedingung an u zu berucksichtigen, definieren wir die schwacheLosung durch
Gesucht ist u ∈ H1,20 (Ω) mit (Du,Dv) = (f, v) fur alle v ∈ H1,2
0 (Ω). (3.11)
Existenz und Eindeutigkeit dieser Losung werden wir gleich auf einfache Art zeigen. Wichtiger ist aberzunachst die Beantwortung der Frage, inwieweit das schwache Losungskonzept uberhaupt noch etwasmit dem klassischen Konzept zu tun hat. Wir haben bereits gesehen, daß eine klassische Losung eineschwache Losung ist, sofern sie sich im Raum H1,2
0 (Ω) befindet. Umgekehrt ist es ahnlich: Wenn dieschwache Losung im Raum C(Ω) ∩ C2(Ω) liegt, so konnen wir in (3.11) partiell integrieren und erhaltenaus dem Fundamentallemma der Variationsrechnung, daß (3.10) erfullt ist.
Wegen der Poincare-Ungleichung gibt es eine Konstante c mit
‖u‖2 ≤ c‖Du‖2 fur alle u ∈ H1,20 (Ω).
Damit ist a(u, v) = (Du,Dv) ein Skalarprodukt auf H1,20 (Ω) mit der Norm a(v, v)1/2 = ‖Dv‖2;Ω, die zu
‖v‖1,2;Ω aquivalent ist. (H1,20 (Ω), a(·, ·)) ist also ebenfalls ein Hilbert Raum.
Fur f ∈ L2(Ω) konnen wir das Funktional
f(v) =
∫
Ω
f(x)v(x) dx fur alle v ∈ H1,20 (Ω),
definieren, das wegen|f(v)| = |(f, v)| ≤ ‖f‖2;Ω‖v‖2;Ω
18

ein stetiges lineares Funktional auf V = H1,20 (Ω) ist. Damit folgt aus dem Rieszschen Darstellungssatz,
daß die schwache Losung aus (3.11) existiert und eindeutig bestimmt ist. Weiter lost u auch das Variati-onsproblem
F (v) =
∫
Ω
1
2|Dv|2 − fv dx → Min fur alle v ∈ H1,2
0 (Ω).
Im Modell der Auslenkung einer Membran, das zu Beginn dieses Kapitels vorgestellt wurde, kann F alsEnergiefunktional des Prozesses gedeutet werden. 1
2
∫
|Dv|2 dx ist die innere Energie, wahrend∫
fv dx diepotentielle Energie ist. Die Losung minimiert die Differenz dieser Energien.
Nun betrachten wir das erste Randwertproblem fur Differentialoperatoren in Divergenzform
Lu = −Dj(aij(x)Diu) + c(x)u = f in Ω, u = 0 auf ∂Ω, (3.12)
und setzen die Koeffizienten aij , c als beschrankt voraus. Der Operator L in (3.12) heißt gleichmaßigelliptisch, wenn es positive Konstanten m,M gibt mit
m|ξ|2 ≤ aij(x)ξiξj ≤M |ξ|2 fur alle ξ ∈ Rn. (3.13)
In diesem Fall sieht man einen weiteren Vorteil des schwache Losungskonzepts: Die starke Losung ist beiunstetigen Koeffizientenfunktionen gar nicht definiert, wahrenddessen die schwache Form mit Hilfe derBilinearform
a(u, v) =
∫
Ω
aijDiuDjv + cuv dx. (3.14)
auf H1,20 (Ω) erklart ist, denn aus der Beschranktheit der Koeffizienten folgt auch die Beschranktheit der
Form,
|a(u, v)| ≤
∫
Ω
|aijDiuDjv + cuv| dx
≤ c supx∈Ω
|aij(x)|, |c(x)|
∫
Ω
n∑
i,j=1
|DiuDjv| + |uv|
dx ≤ c‖u‖1,2;Ω‖v‖1,2;Ω.
Um auch die Definitheit der Form nachweisen zu konnen, benotigen wir als Zusatzvoraussetzung dieBedingung c ≥ 0, denn dann gilt
‖u‖21,2;Ω ≤ c‖Du‖2
2;Ω ≤ cm−1
∫
Ω
aijDiuDju+ cu2 dx = cm−1a(u, u),
und die Definitheit von a(·, ·) ist gezeigt. u heißt wieder schwache Losung von (3.12), wenn u ∈ H1,20 (Ω)
unda(u, v) = (f, v) fur alle v ∈ H1,2
0 (Ω). (3.15)
Aus dem Satz von Lax-Milgram folgen nun Existenz und Eindeutigkeit der schwachen Losung von Pro-blem (3.12). Im unsymmetrischen Fall aij 6= aji kann diese Losung nicht durch ein Variationsproblemcharakterisiert werden.
3.8 Das Ritzsche Verfahren
Sei V ein Hilbert Raum mit innerem Produkt a(·, ·). Wir betrachten das Problem
F (v) =1
2a(v, v) − f(v) → Min, (3.16)
wobei f(·) ein beschranktes lineares Funktional auf V bezeichnet. Wir haben bereits bewiesen, daß diesesProblem eine eindeutig bestimmte Losung u ∈ V besitzt, die außerdem die Variationsgleichung
a(u, v) = f(v) fur alle v ∈ V (3.17)
lost.Um die Probleme (3.16),(3.17) mit einem numerischen Verfahren zu approximieren, setzen wir voraus,
daß V ein separabler Hilbert Raum ist, also daß es endlich dimensionale Teilraume V1, V2, . . . ⊂ V gibt
19

mit dim Vk = k, die die folgende Eigenschaft besitzen: Zu jedem u ∈ V und ε > 0 gibt es ein K ∈ N unduk ∈ Vk mit
‖u− uk‖V ≤ ε fur alle k ≥ K. (3.18)
Es wird dabei nicht verlangt, daß es eine Inklusion der Form Vk ⊂ Vk+1 gibt.Die Ritz Approximation von (3.16),(3.17) ist definiert durch
Gesucht ist uk ∈ Vk mit a(uk, vk) = f(vk) fur alle vk ∈ Vk. (3.19)
u
u
k
0kV
Fig. 3.1
Da endlich dimensionale Teilraume von Hilbert Raumenwiederum Hilbert Raume sind, besitzt nach dem Riesz-schen Darstellungssatz auch die Gleichung (3.19) eineeindeutige Losung, die ebenso das Minimierungsproblem(3.16) im Raum Vk lost. Aus der Differenz der Gleichun-gen (3.17) und (3.19) erhalten wir die Orthogonalitats-relation
a(u− uk, vk) = 0 ∀vk ∈ Vk,
was nichts anderes besagt als u− uk ⊥ Vk. Demnach istuk die orthogonale Projektion von u in den Raum Vk,was auf die Eigenschaft der Bestapproximierenden
‖u− uk‖V = infvk∈Vk
‖u− vk‖V (3.20)
fuhrt, die durch
‖u− uk‖2V = a(u− uk, u− uk) = a(u − uk, u− vk) ≤ ‖u− uk‖V ‖u− vk‖V
bewiesen wird. Mit Bedingung (3.18) und Gleichung (3.20) folgt die Konvergenz des Ritzschen Verfahrensuk → u fur k → ∞.
Fur die Berechnung der uk verwenden wir eine beliebige Basis ϕii=1,...,k des Raumes Vk. Mit uk =∑k
j=1 xjϕj und den Testfunktionen vk = ϕi in (3.19) erhalten wir
k∑
j=1
a(xjϕj , ϕi) = f(ϕi), i = 1, . . . , k,
was aquivalent zur Losung des linearen Gleichungssystems
Ax = b
ist. A mit Elementen aij = a(ϕj , ϕi) heißt wieder Steifigkeitsmatrix. Die rechte Seite b ist der k-Vektor mit
bi = f(ϕi). Mit der 1-1 Zuordnung zwischen dem Koordinatenvektor x und dem Element vk =∑k
i=1 xiϕi
laßt sich leicht zeigen, daß die Matrix A symmetrisch und positiv definit ist,
A = AT ↔ a(v, w) = a(w, v), xTAx > 0 fur x 6= 0 ↔ a(vk, vk) > 0 fur vk 6= 0.
Im nichtvariationellen Fall, also wenn b(·, ·) unsymmetrisch, aber aquivalent zum inneren Produkt ist,konnen wir das Problem b(u, v) = f(v) mit der gleichen Methode approximieren. Die diskrete Losungist dann keine orthogonale Projektion mehr, aber wir konnen das Lemma von Lax-Milgram anwendenund auch eine Fehlerabschatzung wie in (3.20) beweisen. Aus m‖v‖2
V ≤ b(v, v) und der Beschranktheit|b(u, v)| ≤ c‖u‖V ‖v‖V folgt namlich
‖u− uk‖2V ≤ m−1b(u− uk, u− vk) ≤ m−1c‖u− uk‖V ‖u− vk‖V ,
und damit das sogenannte Ceas Lemma
‖u− uk‖V ≤c
minf
vk∈Vk
‖u− vk‖V . (3.21)
Im unsymmetrischen Fall wird dieses Verfahren auch Galerkin Methode genannt. Das lineare Gleichungs-system wird genauso hergeleitet wie im symmetrischen Fall. Die Systemmatrix ist immer noch positivdefinit, aber nicht mehr symmetrisch.
Der wichtigste Punkt beim Ritzschen Verfahren und bei der Galerkin Methode ist die Wahl der RaumeVk. Vom numerischen Standpunkt aus sollten die Elemente aij leicht zu berechnen und die Matrix A nurschwach besetzt sein. Solche Raume haben wir mit den stuckweise linearen Splines aus Kapitel 2 bereitskennengelernt.
20

4 Finite Elemente und Interpolation
4.1 Finite Elemente Raume
Im folgenden sei Λ ein abgeschlossener, beschrankter Polyeder desR2 oderR3.Der Rand ∂Λ von Λ bestehtaus m-dimensionalen linearen Mannigfaltigkeiten, 0 ≤ m ≤ n − 1, die als m-Seitenflachen bezeichnetwerden. Die (n − 1)-Seitenflachen heißen einfach Seiten, die 0-Seitenflachen sind die Eckpunkte und die1-Seitenflachen die Kanten.
Sei s ∈ N0. Auf Λ sei ein endlich dimensionaler Raum P (Λ) ⊂ Cs(Λ) definiert mit dimP (Λ) = NΛ. Imallgemeinen wird P (Λ) ein Polynomraum sein. Im Falle stuckweise linearer Funktionen ist P (Λ) = P1(Λ)und dimP (Λ) = n + 1. Weiter seien linear unabhangige, stetige lineare Funktionale ΦΛ,1, . . . ,ΦΛ,NΛ
:Cs(Λ) → R gegeben.
Mittelwert ueber E
Mittelwert ueber Λ
Auswertung der NormalableitungE = Seite von Λ
Auswertung der ersten Ableitungen
Punktauswertung
Φ(v)=µ(E)-1E
v(s) ds
Φ(v)=µ(Λ)-1Λ
v(x) dx
Φ(v)=Dnv(x)
Φi(v)=Div(x)
Φ(v)=v(x)
...
...
..
E
E
x
x
x
Fig. 4.1
Der Parameter s ∈ N0 wird so gewahlt, daß die Funktionale ΦΛ,1, . . . ,ΦΛ,NΛstetig sind. Wenn bei-
spielsweise ein Funktional die Auswertung einer partiellen Ableitung oder der Normalableitung verlangt,dann muß s = 1 gewahlt werden, fur die anderen Funktionale aus Fig. 4.1 genugt s = 0.
Unsere nachste Bedingung ist die Unisolvenz des Raumes P (Λ) bezuglich der FunktionaleΦΛ,1, . . . ,ΦΛ,NΛ
.
(4.1)Zu jedem αi ∈ R , 1 ≤ i ≤ NΛ, gibt es genau ein p ∈ P (Λ) mit
ΦΛ,i(p) = αi, 1 ≤ i ≤ NΛ.
Aus der Unisolvenzbedingung (4.1) folgt die Existenz der lokalen Basis ϕΛ,ii=1,...,NΛ, ϕΛ,i ∈ P (Λ),
mitΦΛ,i(ϕΛ,j) = δij , 1 ≤ i, j ≤ NΛ.
Damit bilden die ϕΛ,i eine Basis des Raumes P (Λ). Fur komplizierte Finite Elemente wird die lokaleBasis numerisch durch Losen eines linearen Gleichungssystems bestimmt. Wenn namlich qk1≤k≤NΛ
eine
Basis von P (Λ) ist, so setzen wir ϕΛ,j =∑NΛ
k=1 cjkqk, cjk ∈ R, und losen
NΛ∑
k=1
cjkaik = δij , i = 1, . . . , nΛ,
mit
aik = ΦΛ,i(qk).
Aufgrund der Unisolvenz-Bedingung ist die Matrix A = (aik) regular und die Koeffizienten cjk sindeindeutig bestimmt.
Zur Definition allgemeiner Finite Elemente Raume betrachten wir eine Unterteilung Π eines polyhe-dralen Gebiets Ω in Polyeder Λ mit zugehorigen lokalen Raumen P (Λ) wie oben beschrieben. Weiter seienΦ1, . . . ,ΦN : Cs(Ω) → R stetige lineare Funktionale vom gleichen Typ wie in Abbildung Fig. 4.1. DieEinschrankung der Funktionale auf die Elemente Λ erzeugen lokale Funktionale ΦΛ,1, . . . ,ΦΛ,NΛ
die als
21

unisolvent in P (Λ) vorausgesetzt werden. Mit Πi bezeichnen wir diejenigen Elemente Λ, fur die nichtver-schwindende lokale Φi existieren. Wenn zum Beispiel ein Φi zu einer (n−1)-Seitenflache E von Π gehort,so besteht Πi aus den Elementen adjazent zu E.
Definition 4.1 Eine Funktion v definiert auf Ω mit v| int Λ ∈ P (Λ) heißt stetig bezuglich Φi, wenn
Φi(vΛ1) = Φi(vΛ2
)
fur alle Λ1,Λ2 ∈ Πi.Der Raum
S =
v ∈ L∞(Ω) : v|int Λ ∈ P (Λ) und v ist stetig bezuglich Φi
heißt Finite Elemente Raum.
Die globale Basis ϕii=1,...,N des Raumes S ist definiert durch die Bedingungen
ϕi ∈ S, Φi(ϕj) = δij , i, j = 1, . . . , N.
Auf jedem Element stimmt eine globale Basisfunktion mit einer lokalen Basisfunktion uberein, worausdie Eindeutigkeit der globalen Funktion folgt.
Fur viele Finite Elemente Raume folgt aus der Stetigkeit bezuglich Φi auch die Stetigkeit derFinite Elemente Funktionen. Nur in diesem Fall kann von den Werten einer solchen Funktion auf denSeitenflachen gesprochen werden.
4.2 Parametrische Finite Elemente
Im letzten Abschnitt hatten wir sehr allgemeine Finite Elemente Raume betrachtet, bei denen beispiels-weise Zerlegungen in Dreicke und Vierecke erlaubt waren. Hier wollen wir spezieller die sogenanntenparametrischen Elemente betrachten, fur die eine geschlossene Theorie existiert. In der parametrischenDefinition der Finiten Elemente geht man von einem Referenzelement Λ aus mit einem lokalen Raum P (Λ)und Funktionalen Φ1, . . . , ΦN sowie einer Klasse regularer Transformationen FΛ, die Λ auf Λ ⊂ Rn
abbilden. Die Bilder Λ = Λ bilden die Menge der zulassigen Elemente. Die lokalen Raume sind danndefiniert durch
P (Λ) = p : Λ → R : p = p F−1Λ , p ∈ P (Λ) (4.2)
und die lokalen Funktionale durch
ΦΛ,i (v (x)) = Φi (v (FΛx)) ,
wobei x = (x1, . . . , xn) die Koordinaten des Referenzelements bezeichnet und x = FΛ(x).
4.3 Dreiecks- und Tetraederelemente
Ein n-Simplex Λ ⊂ R, n = 2, 3, ist die konvexe Hulle von n + 1 Punkten a1, . . . , an+1 ∈ Rn, die dieEckpunkte von Λ bilden. Λ wird als nichtdegeneriert vorausgesetzt, was aquivalent zur Regularitat derMatrix
A =
a1,1 a1,2 . . . a1,n+1
a2,1 a2,2 . . . a2,n+1
......
...an,1 an,2 . . . an,n+1
1 1 . . . 1
, (4.3)
ist, wobei ai = (a1,i, . . . , an,i). Die beweist man, indem man das translatierte Simplex mit Eckpunkten 0,a2−a1, . . . , an+1−a1 betrachtet. Dieses ist genau dann nichtdegeneriert, wenn die Vektoren a2−a1, . . . ,an+1 − a1 linear unabhangig sind.
Da Λ die konvexe Hulle der Punkte ai ist, konnen wir es folgendermaßen parametrisieren,
Λ =
x ∈ Rn : x =n+1∑
i=1
λiai , 0 ≤ λi ≤ 1 ,n+1∑
i=1
λi = 1
.
22

Die Koeffizienten λ1, . . . , λn+1 ∈ Rn+1 in dieser Darstellung heißen baryzentrische Koordinaten von x ∈ Λ.Sie sind eindeutig bestimmt, denn man erhalt sie als Losung des linearen Gleichungssystems
n+1∑
i=1
aj,iλi = xi, 1 ≤ j ≤ n ,n+1∑
i=1
λi = 1, (4.4)
wobei die Matrix A die gleiche wie in (4.3) ist. Die Eckpunkte des Simplex sind durch λi = 1, λj = 0 fur
j 6= i charakterisiert. Fur den Schwerpunkt gilt λi = 1n+1 fur alle i.
a1 a2
a3
a1
a2
a3
a4
a12
a13 a23a123
a112 a221
a112
a221a12
a134
Fig. 4.2
Fig. 4.2 zeigt unsere Notation fur einige spezielle Punkte. Mit ai1i2i3 , i1 < i2 < i3, bezeichnen wirden Schwerpunkt der 2-Seitenflache mit Eckpunkten ai1 , ai2 , ai3 . Die baryzentrischen Koordinaten vonai1i2i3 sind λik
= 1/3 fur k = 1, 2, 3 und λj = 0 sonst. Jede Kante aiaj von Λ kann in drei Streckengleicher Lange mit Endpunkten aiij , ajji unterteilt werden. Die baryzentrischen Koordinaten von aiij sindλi = 2/3, λj = 1/3, und λl = 0 fur l 6= i, j. Fur n = 3 wird der Schwerpunkt von Λ mit a1234 bezeichnet.Weiter verwenden wir die Notation aij fur den Mittelpunkt der Kante aiaj .
Das Referenzelement ist das Einheitssimplex
Λ =
x ∈ Rn :
n∑
i=1
xi ≤ 1, xi ≥ 0 fur i = 1, . . . , n
und die Klasse FΛ der zulassigen Transformationen sind die regularen affin linearen Transformationen
FΛx = Bx+ b , B ∈ Rn×n mit detB 6= 0, b ∈ Rn.
Die Bilder von Λ unter diesen Transformationen erzeugen die Menge Λ der nichtdegenerierten SimplizesΛ ⊂ Rn. Wenn nun ein unisolventer Satz von Funktionalen auf dem Einheitssimplex spezifiziert ist, soerhalten wir mit der Definition (4.2) lokale Finite Elemente Raume auf jedem nichtdegenerierten Sim-plex. Die Gesamtheit dieser lokalen Raume heißt dann eine affine Familie simplizialer Elemente. Diegelaufigsten affinen Familien werden in Fig. 4.3 gezeigt. Die linearen Funktionale Φi auf dem Referenz-element sind Auswertungen der Funktion und/oder der ersten Ableitungen in den Punkten mit gleichenbaryzentrischen Koordinaten.
23

a1 a2
a3(1)
IP1, C0, dim IP1=n+1
a1 a2
a3
a12
a13a23
(2)
IP2, C0, dim IP2=1---2(n+1)(n+2)
a1 a2
a3
a112 a221
a113
a331
a223
a332a123
(3)
IP3, C0, dim IP3=1---6(n+1)(n+2)(n+3)
a1 a2
a3
a123
(4)
IP3, C0, dim IP3=1---6(n+1)(n+2)(n+3)
a12
a13a23
(5)
IP1, C-1, dim IP1=n+1
Fig. 4.3
24

Fur das lineare Gleichungssystem (4.4) erhalten wir als Losung
λi =
n∑
j=1
a−1i,j xj + a−1
i,n+1, 1 ≤ i ≤ n+ 1, (4.5)
wobei A−1 = (a−1i,j ) die inverse Matrix von A aus (4.3) ist. Damit ist λ eine affin lineare Funktion von x
und jedes Polynom vom Grade kleiner gleich m in x laßt sich als ein Polynom vom Grade kleiner gleichm in λ darstellen und umgekehrt.
Element 1) Fur die Funktionale Φi(v) = v(ai), i = 1, . . . , n+1, haben wir die lokale Basis ϕi(λ) = λi.Damit sind die Funktionale unisolvent bezuglich des Polynomraumes P1(Λ). Nun zeigen wir, daß dieElemente des zugehorigen Finite Elemente Raumes stetig sind. Seien Λ1,Λ2 zwei Elemente mit einergemeinsamen Seite E und sei v ∈ S. Die Fortsetzung von vΛ1
, vΛ2auf E ist wieder eine lineare Funktion
auf E. Diese lineare Funktion ist eindeutig bestimmt durch die n Funktionale adjazent zu E und dahervΛ1
|E = vΛ2|E .
Element 2) Zu den Funktionalen Φi(v) = v(ai), i, j = 1, . . . , n, i < j, gehort die lokale Basis
ϕi(λ) = λi(2λi − 1), ϕij(λ) = 4λiλj ,
womit die Unisolvenzbedingung nachgewiesen ist. Die Stetigkeit des zugehorigen Finite Elemente Raumeszeigt man genauso wie beim Element 1). Die Einschrankung einer quadratischen Funktion auf eine SeiteE ist wiederum quadratisch und eindeutig bestimmt durch die 1
2n(n+ 1) Funktionale in E.Element 3) Fur die Funktionale
Φi(v) = v(ai), Φiij(v) = v(aiij), i, j = 1, . . . , n+ 1, Φijk(v) = v(aijk), i < j < k,
lautet die lokale Basis
ϕi(λ) =1
2λi(3λi − 1)(3λi − 2) , ϕiij(λ) =
9
2λiλj(3λi − 1), ϕijk(λ) = 27λiλjλk.
Der zugehorige Finite Element Raum ist von der Klasse C0.Es gibt auch eine reduzierte Form dieses Elementes, in der die Funktionale auf den Seitenflachen
fortgelassen werden (siehe [7], S. 50).Element 4) Da in diesem Element auch erste Ableitungen verwendet werden, wird es auch das kubische
Hermite Element genannt im Gegensatz zum kubischen Lagrange Element aus dem letzten Beispiel. DiesesElement bildet keine affine Familie im strengen Sinn, weil die Funktionale fur die partiellen AbleitungenΦi(v) = Div(0) auf dem Referenzelement abgebildet werden auf die Funktionale Φi(v) = Dti
v(a), wobeia = FΛ(0) und ti sind Kantenrichtungen adjazent zu a.Dennoch ist dies genug, um alle ersten Ableitungenzu kontrollieren, aber bei der praktischen Implementierung dieses Elementes darf dies nicht vergessenwerden.
Wegen der obigen Bemerkung schreiben wir die Ableitungen in Kantenrichtung vor und verwendendie Funktionale
Φi(v) = v(ai), Φij(v) = Dv(ai)(aj − ai), i, j = 1, . . . , n+ 1, i 6= j,
Φijk(v) = v(aijk), i < j < k,
mit zugehoriger lokaler Basis
ϕi(λ) = −2λ3i + 3λ2
i − 7λi
∑
j<k, j 6=i, k 6=i
λjλk,
ϕij(λ) = λiλj(2λi + λj − 1), ϕijk(λ) = 27λiλjλk.
Um die geforderten Eigenschaften dieses Systems nachzuweisen, drucken wir die kartesischen Ableitungendurch Ableitungen in λ aus. Sei e1, . . . , en+1 die kanonische Basis des Rn+1. Mit der Transformationv(x) = v(λ) folgt
Dxv(ai)(aj − ai) = limh→0
1
hv(ai + h(aj − ai)) − v(ai)
= limh→0
1
hv(ei + h(ej − ei)) − v(ei) = Dλj
v(ei) −Dλiv(ei).
25

Damit kann die Orthogonalitatseigenschaft der Basis hinsichtlich der Funktionale leicht nachgewiesenwerden.
Wir zeigen die Stetigkeit des zugehorigen Finite Elemente Raumes nur fur den Fall n = 2. Seien Λ1,Λ2
zwei Elemente mit einer gemeinsamen Kante E, deren Tangenteneinheitsvektor mit t bezeichnet wird.Seien P1, P2 die Endpunkte von E. Die Fortsetzungen vΛ1
, vΛ2genugen den Beziehungen
vΛ1(Pi) = vΛ2
(Pi), DtvΛ1(Pi) = DtvΛ2
(Pi), i = 1, 2.
Da diese Fortsetzungen kubische Polynome sind, stimmen ihre Werte auf E uberein.Das Element 4) hat gegenuber dem Element 3) einen Vorteil. Im zweidimensionalen Fall gilt namlich
fur eine regulare Triangulierung Π|Λ| ≈ 2|P |, |E| ≈ 2|P |,
wobei | · | die Kardinalitat der Dreiecke, Knotenpunkte und Kanten bezeichnet. Damit ist die Dimensiondes Finite Element Raumes 3) ungefahr 7|P | im Gegensatz zu 5|P | bei Element 4). Diese zunachst uber-raschende Tatsache erklart sich daraus, daß die beiden zugehorigen Finite Elemente Raume verschiedensind: Beide Raume sind Raume stetiger Funktionen, aber die Funktionen aus 4) sind zusatzlich in denersten Ableitungen in den Knotenpunkten stetig.
Eine reduzierte Form des Elementes 4) findet sich in [7], S. 67.Element 5) Zur Beschreibung dieses Elementes verwenden wir eine etwas andere Notation und setzen
Φi(v) = v(ai−1 i+1) fur n = 2, Φi(v) = v(ai−2 i−1 i+1) fur n = 3.
Dieses System ist unisolvent mit Basisϕi(λ) = 1 − nλi.
Aus der Stetigkeit im Schwerpunkt der Seitenmitten folgt nicht die Stetigkeit des zugehorigen FiniteElemente Raumes.
4.4 Rechtecks- und Quaderelemente
In diesem Abschnitt betrachten wir Rechteckselemente. Das Referenzelement ist das EinheitsquadratΛ = [0, 1]n und die Klasse FΛ der zulassigen Transformationen besteht aus den regularen affin linearenTransformationen der Form
FΛx = Bx+ b, b ∈ Rn,
mit einer Diagonalmatrix B. Diese Transformationen bilden Λ auf die n-Rechtecke Λ ab, die damit dieKlasse Λ bilden. Es ware ebenfalls moglich, allgemeine affin lineare Transformationen zu verwenden,die Klasse der zulassigen Elemente bestunde dann aus allen Parallelogrammen, aber auch diese Klasseware zu klein, um damit allgemeine Gebiete zu unterteilen. Der Fall allgemeiner Vierecke wird spaterbetrachtet.
Wir definieren die PolynomraumeQk = span xα : 0 ≤ αi ≤ k fur i = 1, . . . , n,
insbesondere besteht Q1 aus allen n-linearen Polynomen.
26

a1 a2
a3a4
(1)
IQ1, C0, dim IQ1=2n
(2)
IQ2, C0, dim IQ2=3n
(3)
IQ3, C0, dim IQ3=4n
(4)
IQ’1, C-1, dim IQ’1=2n
Fig. 4.4
Die Elemente 1) - 3) in Fig. 4.4 sind die Gegenstucke der simplizialen Elemente aus Fig. 4.3. Sie konnenals Tensorprodukte eindimensionaler Elemente angesehen werden. Demnach konnen die Basisfunktionenals Produkte der folgenden eindimensionalen Funktionen geschrieben werden.
1) ϕ1(x) = 1 − x, ϕ2(x) = x ,
2) ϕ1(x) = (1 − 2x)(1 − x), ϕ2(x) = 4x(1 − x), ϕ3(x) = −x(1 − 2x),
3) ϕ1(x) =1
2(1 − 3x)(2 − 3x)(1 − x), ϕ2(x) =
9
2(2 − 3x)(1 − x),
ϕ3(x) = −9
2(1 − 3x)(1 − x), ϕ4(x) =
1
2(1 − 3x)(2 − 3x).
27

Zum Beispiel sind die Basisfunktionen des bilinearen Elementes 1) auf [0, a] × [0, b] von der Form
ϕ1(x) = (1 −x1
a)(1 −
x2
b), ϕ2(x) =
x1
a(1 −
x2
b), ϕ3(x) =
x1
a
x2
b, ϕ4(x) = (1 −
x1
a)x2
b.
Die Stetigkeit der zugehorigen Finite Elemente Raume kann genauso wie im simplizialen Fall bewiesenwerden, denn die Einschrankung einer Funktion aus Qk auf eine Seitenflache ergibt den gleichen Poly-nomraumQk auf dieser Seitenflache. Reduzierte Formen der Elemente 2) und 3) werden in [7] angegeben.
Fur das Element 4) verwenden wir den Raum Q′1 = Q1,n der rotierten n-linearen Polynome, der
durch Q′1,2(Λ) = span 1, x1, x2, x
21 − x2
2, Q′1,3(Λ) = span 1, x1, x2, x3, x
21 − x2
2, x21 − x2
3.
definiert ist. Man beachte, daß der transformierte Raum
P (Λ) = Q′1(Λ) =
p = p F−1Λ , p ∈ Q′
1(Λ)
Polynome der Form ax21 − bx2
2 enthalt, wobei a, b von FΛ abhangen.Fur n = 2 ist die lokale Basis auf dem Einheitsquadrat gegeben durch
ϕ14(x) = x21 − x2
2 − 2x1 + x2 +3
4, ϕ12(x) = −(x2
1 − x22) + x1 − 2x2 +
3
4,
ϕ23(x) = x21 − x2
2 + x2 −1
4, ϕ34(x) = −(x2
1 − x22) + x1 −
1
4.
Die zugehorigen Finite Elemente Funktionen sind i.a. unstetig.
4.5 Parametrische Elemente auf allgemeinen Vierecken
Wenn wir Finite Elemente auf allgemeinen Vierecken verwenden wollen, mussen wir die Klasse der zulassi-gen Transformationen vergroßern. Hier werden wir nur das einfachste Element dies Typs beschreiben. SeiΛ ⊂ R2 das Einheitsquadrat und seien
FΛ(x) = (F 1Λ(x), F 2
Λ(x)), F iΛ ∈ Q1 fur i = 1, 2,
die bilinearen Abbildungen, die Λ auf die Klasse der zulassigen Vierecke abbilden, die durch die Bedingung
Die Elemente Λ sind konvex mit Seitenlange großer als Null und inneren Winkeln kleiner als π.
definiert sind. Wir zeigen nun, daß das zugehorige FΛ ein Diffeomorphismus ist. Jede Strecke xi =constwird abgebildet auf eine Strecke. Daher gehort das Bild eines Rechtecks [a1, b1] × [a2, b2] ⊂ Λ ebenfallszur Klasse der zulassigen Rechtecke. Damit ist die Funktionalmatrix FΛ regular auf Λ.
Die Elemente des lokalen Raumes Q1(Λ) sind definiert durch p = pF−1Λ und sind demnach rationale
Funktionen. Da die Einschrankung von FΛ auf eine Kante von Λ eine lineare Abbildung ist, sind dieElemente von Q1(Λ) lineare Funktionen auf jeder Kante von Λ. Daher besteht der zugehorige FiniteElemente Raum aus stetigen Funktionen.
Nach dem gleichen Verfahren lassen sich auch Elemente hoherer Ordnung auf Vierecken konstruieren.Da es einige Probleme bei der Abschatzung des Interpolationsfehlers gibt, wollen wir dies nicht weiterausfuhren.
4.6 Polynominterpolation in Sobolev Raumen
In diesem Abschnitt bezeichnet Ω ein beschranktes Lipschitzgebiet des Rn. Wir wollen Fehlerabschatzun-gen fur den Interpolationsfehler herleiten und beginnen mit den grundlegenden Prinzipien der Polyno-minterpolation in Sobolev Raumen.
Lemma 4.2 Zu aα ∈ R, |α| ≤ m, gibt es ein eindeutig bestimmtes Polynom p ∈ Pm(Ω) mit
∫
Ω
Dαp dx = aα, |α| ≤ m. (4.6)
28

Beweis: Aus der Entwicklung p(x) =∑
|β|≤m bβxβ folgt, daß bβ die Losung des linearen Systems
Mb = a ist mit b = (bβ), a = (aα) und
M = (Mαβ), Mαβ =
∫
Ω
Dαxβ dx fur |α|, |β| ≤ m.
Angenommen, M ware singular. Dann besitzt das zugehorige homogene Gleichungssystem eine nichttri-viale Losung, sodaß es ein Polynom q ∈ Pm \ 0 gibt mit
∫
Ω
Dαq dx = 0 fur |α| ≤ m. (4.7)
In der Entwicklung q(x) =∑
|β|≤m cβxβ wahlen wir ein cβ 6= 0 mit maximalem |β|. Dann giltDβq =const,
was (4.7) widerspricht.Der nachste Satz ist ein weiteres Beispiel fur eine Ungleichung vom Poincare Typ.
Lemma 4.3 Sei Ω konvex und in einer Kugel vom Radius R enthalten. Seien k, l naturliche Zahlen mit0 ≤ k ≤ l und sei p ∈ R mit 1 ≤ p ≤ ∞. Dann gilt fur jedes v ∈ H l,p(Ω), das
∫
ΩDαv dx = 0 fur alle
|α| ≤ l − 1 erfullt, die Abschatzung
‖Dkv‖p;Ω ≤ cRl−k‖Dlv‖p;Ω,
wobei die Konstante c nicht von Ω und v abhangt.
Beweis: Im Fall k = l ist nichts zu beweisen. Weiter genugt es, das Lemma fur k = 0 und l = 1 zuzeigen, da der allgemeine Fall folgt, wenn wir dieses Resultat auf Dαv anwenden.
Der Mittelwertsatz kann in der Form
v(x) − v(y) =
∫ 1
0
Dv(tx + (1 − t)y)(x − y) dt, x, y ∈ Ω,
geschrieben werden. Wir integrieren diese Beziehung bezuglich y und erhalten, da der Mittelwert von vverschwindet,
v(x) =1
µ(Ω)
∫
Ω
∫ 1
0
Dv(tx + (1 − t)y)(x− y) dt dy.
Auf der rechten Seite verwenden wir die Abschatzung |x− y| ≤ cR,
|v(x)| ≤cR
µ(Ω)
∫
Ω
∫ 1
0
|Dv(tx+ (1 − t)y)| dt dy. (4.8)
Fur p <∞ wird diese Abschatzung in die p-te Potenz gehoben und bezuglich x integriert,
∫
Ω
|v(x)|p dx ≤cRp
µ(Ω)p
∫
Ω
(
∫
Ω
∫ 1
0
|Dv(tx+ (1 − t)y)| dt dy)p
dx
≤cRp
µ(Ω)p
∫
Ω
(
∫
Ω
∫ 1
0
1q dt dy)p/q
∫
Ω
∫ 1
0
|Dv(tx + (1 − t)y)|p dt dy
dx
≤cRp
µ(Ω)
∫
Ω
∫
Ω
∫ 1
0
|Dv(tx + (1 − t)y)|p dt dy dx.
Mit dem Satz von Fubini ziehen wir die Integration bezuglich t nach außen und erhalten fur ein t0 ∈ [0, 1]
∫
Ω
|v(x)|p dx ≤cRp
µ(Ω)
∫
Ω
∫
Ω
|Dv(t0x+ (1 − t0)y)|p dy dx.
Mit f(x) bezeichnen wir die Fortsetzung von |Dv(x)|p in den Rn durch 0. Fur t0 ∈ [0, 12 ] erhalten wir
∫
Ω
|v(x)|p dx ≤cRp
µ(Ω)
∫
Ω
∫Rn
f(t0x+ (1 − t0)y) dy dx
≤ cRp
∫Rn
f((1 − t0)y) dy.
29

Mit der Transformation z = (1 − t0)y kann das Integral auf der rechten Seite durch ‖Dv‖pp abgeschatzt
werden. Wenn t0 >12 vertauschen wir mit dem Satz von Fubini die Rollen von x und y und argumentieren
genauso. Der Fall p = ∞ folgt aus (4.8) durch eine einfache Abschatzung.Eine einfache Anwendung dieser Ergebnisse ist der Beweis des bekannten Bramble-Hilbert Lemmas,
das besagt, daß ein stetiges lineares Funktional, das auf einem Sobolev Raum definiert ist und auf einemPolynomraum verschwindet, durch die hochsten Ableitungen der Sobolev-Norm abgeschatzt werden kann.Genauer haben wir:
Satz 4.4 (Bramble-Hilbert Lemma) Sei m + 1 ∈ N, 1 ≤ p ≤ ∞, und sei F : Hm+1,p(Ω) → R einstetiges lineares Funktional, also
|F (v)| ≤ c1‖v‖m+1,p;Ω.
Weiter seiF (p) = 0 fur alle p ∈ Pm(Ω).
Dann gibt es eine Konstante c(Ω) unabhangig von v und F mit
|F (v)| ≤ cc1‖Dm+1v‖p;Ω fur alle v ∈ Hm+1,p(Ω). (4.9)
Beweis: Sei v ∈ Hm+1,p(Ω). Wegen Lemma 4.2 gibt es ein p ∈ Pm(Ω) mit
∫
Ω
Dα(v + p) dx = 0 fur |α| ≤ m.
Lemma 4.3 liefert‖v + p‖m+1,p;Ω ≤ c‖Dm+1(v + p)‖p;Ω = c‖Dm+1v‖p;Ω
und daher
|F (v) = |F (v + p)| ≤ c1‖v + p‖m+1,p;Ω ≤ cc1‖Dm+1v‖p;Ω.
Nun wollen wir Interpolationsfehlerabschatzungen fur affine Familien Finiter Elemente beweisen undbeginnen mit einigen Abschatzungen auf dem Referenzelement. Sei Λ ⊂ Rn, n = 2, 3, ein Referenzelement,also ein abgeschlossenes, beschranktes, konvexes Polyeder, P (Λ) sei ein Polynomraum der Dimension N,und Φ1, . . . , ΦN : Cs(Λ) → R seien stetige lineare Funktionale. Es wird vorausgesetzt, daß die Unisol-venzbedingung (4.1) fur den Raum P (Λ) bezuglich der Funktionale Φi erfullt ist. Dann gibt es eine lokaleBasis ϕ1, . . . , ϕN ∈ P (Λ) mit Φi(ϕj) = δij fur i, j = 1, . . . , N. Fur v ∈ Cs(Λ) ist die Interpolierende IΛvdefiniert durch
IΛv(x) =
N∑
i=1
Φi(v)ϕi(x). (4.10)
IΛ ist ein linearer und stetiger Operator von Cs(Λ) nach P (Λ) wegen
IΛ(αv + βw) =
N∑
i=1
Φi(αv + βw)ϕi = αIΛ(v) + βIΛ(w),
‖IΛv‖ ≤N∑
i=1
ci‖v‖s,∞;Λ‖ϕi‖ ≤ c‖v‖s,∞;Λ, (4.11)
wobei die Konstante c nicht von v, aber moglicherweise von der Norm ‖ · ‖ auf P (Λ) abhangt. Aus derLinearitat von Φi schließen wir, daß IΛ die Identitat auf P (Λ) ist,
IΛp = p fur alle p ∈ P (Λ), (4.12)
denn fur p =∑N
j=1 αjϕj gilt
IΛp(x) =
N∑
i=1
Φi(p)ϕi(x) =
N∑
i=1
Φi
(
N∑
j=1
αjϕj
)
ϕi(x) =
N∑
i=1
αiϕi(x) = p(x).
30

Beispiel 4.5 Sei Λ ⊂ Rn beliebig, P (Λ) = P0(Λ), Φ(v) = µ(Λ)−1∫
Λv(x) dx. Fur die Wahl s = 0 ist Φ
ein stetiges lineares Funktional auf C0(Λ),
|Φ(v)| ≤ µ(Λ)−1
∫
Λ
|v(x)|dx ≤ ‖v‖∞;Λ.
Fur die konstante Funktion 1 ∈ P0(Λ) gilt Φ(1) = 1, woraus die Unisolvenzbedingung folgt. IΛv ist derMittelwertoperator.
Man kann auch Φ(v) = v(x0) fur einen beliebigen Punkt x0 ∈ Λ setzen. Diese Funktion ist wiederlinear und stetig auf C0(Λ) und IΛv ist die Auswertung in x0. Aus diesem Beispiel sehen wir, daß der
Interpolationsoperator IΛ von P (Λ) und von den gewahlten Funktionalen Φi abhangt.
Satz 4.6 Sei Pm(Λ) ⊂ P (Λ) und sei p eine Zahl mit 1 ≤ p ≤ ∞, sodaß (m + 1 − s)p > n und somitnach Satz 3.13 die Einbettung
Hm+1,p(Λ) → Cs(Λ) (4.13)
richtig ist. Dann gibt es eine Konstante c unabhangig von v mit
‖v − IΛv‖m+1,p;Λ ≤ c‖Dm+1v‖p;Λ fur alle v ∈ Hm+1,p(Λ). (4.14)
Bemerkung 4.7 Durch Gegenbeispiel weist man leicht nach, daß (4.13) nicht erfullt ist, wenn (m+ 1−s)p < n. Wenn wir beispielsweise mit stuckweise linearen Elementen interpolieren wollen, so ist m = 1,s = 0. Da in den Anwendungen vor allem der Fall p = 2 wichtig ist, haben wir eine befriedigendeInterpolationstheorie nur fur die Raumdimensionen n ≤ 3.
Weiter sei darauf hingewiesen, daß lediglich Pm(Λ) ⊂ P (Λ) verlangt wird. Dies schließt nicht aus, daßP (Λ) Polynomraume noch hoherer Ordnung enthalt. Anders ausgedruckt: Man braucht nicht die volleApproximationsfahigkeit des Polynomraumes auszunutzen, sofern die Stetigkeitsbedingung (4.13) erfulltist.
Beweis: Wegen der Einbettung (4.13) ist der Interpolationsoperator auch aufHm+1,p(Λ) wohldefiniert.Aus (4.12) und (4.11) erhalten wir fur q ∈ Pm(Λ)
‖v − IΛv‖m+1,p;Λ = ‖v + q − IΛ(v + q)‖m+1,p;Λ ≤ ‖v + q‖m+1,p;Λ + ‖IΛ(v + q)‖m+1;Λ
≤ ‖v + q‖m+1,p;Λ + c‖v + q‖s,∞;Λ ≤ c‖v + q‖m+1,p;Λ.
Im Lemma 4.2 wahlen wir q so, daß
∫
Λ
Dα(v + q) dx = 0 fur |α| ≤ m.
Damit sind die Voraussetzungen von Lemma 4.3 erfullt und
‖v + q‖m+1,p;Λ ≤ c‖Dm+1(v + q)‖p;Λ = c‖Dm+1v‖p;Λ.
Wir betrachten eine affine Familie von Finiten Elementen, die von den linearen Abbildungen
FΛx = Bx + b
erzeugt werden, wobei B eine (n×n)-Matrix und b ein n-Vektor ist. Das Bild Λ = FΛ(Λ) soll die ublicheBedingung erfullen
(4.15)Λ ⊂ Rn ist in einer Kugel vom Radius cRh enthalten und enthalt eine Kugelvom Radius c−1
R h.
Im folgenden hangen unsere Abschatzungen von cR und Λ, aber nicht von Λ ab.
Lemma 4.8 Fur eine beliebige Matrixnorm ‖ · ‖ gelten die Abschatzungen
‖B‖ ≤ ch, ‖B−1‖ ≤ ch−1,
wobei die Konstanten c von der Matrixnorm abhangen.
31

Beweis: Da Λ als Lipschitzgebiet vorausgesetzt wurde, enthalt es eine Kugel Br(x0). Daher ist
xF^
0
^Λ Λ→Λ
Fig. 4.5
x0 + y ∈ Λ fur |y| = r und die Bilder
x0 = Bx0 + b, x = B(x0 + y) + b
sind in Λ enthalten. Aus Bedingung (4.15) schließen wir, daß |x − x0| ≤ ch und fur die von | · | erzeugteMatrixnorm ‖ · ‖2→2 gilt
‖B‖2→2 = sup|z|=1
|Bz| =1
rsup|y|=r
|By| ≤1
r|x− x0| ≤ ch.
Da alle Matrizennormen aquivalent sind, folgt diese Abschatzung auch fur ‖B‖. Die Abschatzung fur‖B−1‖ erhalt man aus den gleichen Argumenten, wenn man die Rollen von Λ und Λ vertauscht.
Mit bij und b(−1)ij bezeichnen wir die Elemente der Matrizen B und B−1. Da ‖B‖∞ = maxi,j |bij | ebenfalls
eine Matrixnorm ist, gilt|bij | ≤ ch, |b−1
ij | ≤ ch−1. (4.16)
Mit diesen Abschatzungen konnen wir (4.14) auf Λ transformieren. Dazu mussen wir sicherstellen, daß dertransformierte Interpolationsoperator mit dem naturlichen Interpolationsoperator ubereinstimmt. Dieserist durch
IΛv =
N∑
i=1
ΦΛ,i(v)ϕΛ,i,
definiert, wobei ϕΛ,i die Basis des Raumes
P (Λ) = p : Λ → R : p = p F−1Λ , p ∈ P (Λ)
ist, die der Beziehung ΦΛ,i(ϕΛ,j) = δij genugt. Die Funktionale waren definiert durch
ΦΛ,i(v(x)) = Φi(v(F x)).
Daher gilt
ΦΛ,i(ϕj(F−1Λ (x))) = Φi(ϕj(x)) = δij ,
also ϕΛ,i = ϕΛ,i F−1Λ . Aus
IΛv F =
N∑
i=1
Φi(v F )ϕΛ,i F = IΛv,
folgt, daß IΛv sich richtig transformiert. Aus (4.16) erhalten wir
| detB| ≤ chn, | detB−1| ≤ ch−n (4.17)
und aus der Kettenregel
Dx,iv(x) = Dx,j v(x)b−1ji , Dx,iv(x) = Dx,jv(x)bji,
also|Dk
xv(x)| ≤ ch−k|Dxv(x)|, |Dkxv(x)| ≤ chk|Dk
xv(x)|,
32

und∫
Λ
|Dkxv(x)|
p dx ≤ chkp| detB−1|
∫
Λ
|Dkxv(x)|
p dx ≤ chkp−n
∫
Λ
|Dkxv(x)|
p dx, (4.18)
∫
Λ
|Dkxv(x)|
p dx ≤ ch−kp| detB|
∫
Λ
|Dkxv(x)|
p dx ≤ ch−kp+n
∫
Λ
|Dkxv(x)|
p dx. (4.19)
Wir schreiben (4.14) in der Form
‖Dkx(v − IΛv)‖
p
p;Λ≤ c‖Dm+1
x v‖p
p;Λ, 0 ≤ k ≤ m+ 1
und erhalten
‖Dkx(v − IΛv)‖
pp;Λ ≤ ch−kp+n‖Dk
x(v − IΛv)‖p
p;Λ≤ ch−kp+n‖Dm+1
x v‖p
p;Λ
≤ ch(m+1−k)p‖Dm+1x v‖p
p;Λ.
Damit haben wir den folgenden Satz gezeigt.
Satz 4.9 Sei eine affine Familie Finiter Elemente durch ein Referenzelement Λ, Funktionale Φi, undeinen Polynomraum P (Λ) gegeben. Weiter seien die Bedingungen an m, p, s, P (Λ) aus Satz 4.6 erfullt.Dann gibt es eine Konstante c unabhangig von v ∈ Hm+1,p(Λ) und Λ mit
‖Dk(v − IΛv)‖p;Λ ≤ chm+1−k‖Dm+1v‖p;Λ, 0 ≤ k ≤ m.
Fur den einfachen Finite Elemente Raum aus Beispiel 4.5 erhalten wir
‖v − v(x0)‖2;Λ ≤ ch‖Dv‖2;Λ,
falls n < 2, denn die Einbettung H1,2 → C0 gilt nicht fur n = 2.
4.7 Inverse Abschatzungen
In diesem Abschnitt verwenden wir die Methode zum Beweis der Interpolationsfehlerabschatzung, umdie sogenannten inversen Abschatzungen zu zeigen. Sei eine affine Familie von Finiten Elementen wie imletzten Abschnitt gegeben. Insbesondere sei die Bedingung (4.15) fur jedes Λ erfullt.
Satz 4.10 Seien 0 ≤ k ≤ l naturliche Zahlen und sei 1 ≤ q ≤ r ≤ ∞. Dann gibt es eine Konstante c,die nur von k, l, q, r, Λ, P (Λ) abhangt, mit
‖Dlp‖r;Λ ≤ chn(r−1−q−1)+(k−l)‖Dkp‖q;Λ fur alle p ∈ P (Λ),
wobei r−1 = 0 fur r = ∞ und q−1 = 0 fur q = ∞.
Beweis: Im ersten Schritt zeigen wir die Abschatzung fur h = 1 und k = 0 auf dem Referenzelement.Da in einem endlichdimensionalen Raum alle Normen aquivalent sind, konnen wir eine Seminorm durcheine Norm abschatzen und erhalten
‖Dlp‖r;Λ ≤ c‖p‖q;Λ fur alle p ∈ P (Λ). (4.20)
Im Falle k > 0 setzen wirP (Λ) = Dαp : p ∈ P (Λ), |α| = k,
was wiederum ein Polynomraum ist. Aus (4.20) angewendet auf P (Λ) folgt
‖Dlp‖r;Λ ≤∑
|α|=k
‖Dl−kDαp‖r;Λ ≤ c‖Dkp‖q;Λ.
Diese Abschatzung wird genauso wie im vorigen Abschnitt auf das Element Λ transformiert. Aus (4.18)und (4.19) erhalten wir
‖Dlp‖r;Λ ≤ ch−l+n/r‖Dlp‖r;Λ ≤ ch−l+n/r‖Dkp‖q;Λ ≤ chk−l+n/r−n/q‖Dkp‖q;Λ.
33

Fur r = q ubertragt sich die inverse Abschatzung auf den Finite Elemente Raum S, sofern eine regulareUnterteilung verwendet wird,
‖Dlvh‖′p ≤ chk−l‖Dkvh‖
′p, (4.21)
wobei
‖ · ‖′p =(
∑
Λ∈Π
‖ · ‖pp;Λ
)1/p
.
Bei nichtlinearen Problemen kann manchmal eine andere inverse Abschatzung zwischen der L∞-Normund der H1,2-Norm wichtig sein.
Satz 4.11 Sei S ⊂ C0(Ω) ein Finite Elemente Raum, der auf einer regularen Unterteilung in affinaquivalente Elemente definiert ist. Dann gilt
‖vh‖∞;Ω ≤ cn(h)‖vh‖1,2;Ω fur alle vh ∈ S
mit c2(h) = c| lnh|1/2, cn(h) = ch−n/2+1 fur n ≥ 3.
4.8 Approximation nichtglatter Funktionen
In der Interpolationstheorie aus dem letzten Abschnitt ist es zwingend erforderlich, daß der Interpolati-onsoperator stetig definiert ist auf dem Sobolev Raum, dem die zu interpolierende Funktion angehort.Wenn wir beispielsweise unstetige Funktionen mit stetigen, stuckweise linearen Elementen interpolierenwollen, so erhalten wir aus dem letzten Abschnitt keine Resultate. Am einfachsten laßt sich hier Abhilfeverschaffen, indem die zu approximierende Funktion zuerst geglattet und dann die geglattete Funktioninterpoliert wird (siehe [21]). Da es bei dieser Methode zu Schwierigkeiten am Rande kommt, wollen wirsie hier nicht weiter verfolgen.
Im folgenden stellen wir zwei Methoden zur Konstruktion von Approximationsoperatoren an Handlinearer Finiter Elemente vor. Der erste Operator ([8]) ist schon auf L1(Ω) definiert und laßt sich praktischauf alle Finiten Elemente verallgemeinern, der zweite ([18]) ist dagegen spezieller, aber hat den Vorteil,eine Nullrandbedingung zu erhalten. Wir betrachten eine regulare Unterteilung Π in Simplizes Λ einespolyhedralen Gebietes Ω ⊂ Rn, n = 2, 3.Mit S bezeichnen wir den Raum der stetigen, stuckweise linearenElemente und S0 sei S ∩H1,2
0 (Ω).
Der Approximationsoperator von Clement Zu jedem Knotenpunkt Pi der Unterteilung sei dasMakroelement i die Vereinigung der Simplizes Λ mit Pi ∈ Λ. Zu v ∈ L1(Ω) definieren wir einenApproximationsoperator Rhv ∈ S mit Hilfe einer lokalen L2-Projektion. Zu jedem i sei pi ∈ P1(i) dieLosung von
∫
i
(v − pi)q dx = 0 ∀q ∈ P1(i). (4.22)
SetzeRhv(x) =
N∑
i=1
pi(Pi)ϕi(x),
wobei ϕii=1,...,N die naturliche Basis von S bezeichnet. Offenbar gilt Rh : L1(Ω) → S.
Satz 4.12 Seien k, l ∈ N0, q ∈ R mit 0 ≤ k ≤ l ≤ 2, 1 ≤ q ≤ ∞. Sei die Vereinigung allerMakroelemente i, die das Element Λ enthalten. Dann gilt fur alle v ∈ H l,q() die Abschatzung
‖Dk(v −Rhv)‖q;Λ ≤ chl−k‖Dlv‖q;,
wobei die Konstante c unabhangig von v und h ist.
Beweis: Da die Behauptung trivial ist im Falle k = l = 2, setzen wir k = 0, 1 voraus.Da die L2-Projektion das Element bester Approximation liefert, folgt aus (4.22)
Rhp = p in Λ fur alle p ∈ P1(). (4.23)
Damit ist Rh ein konsistenter Operator.Im nachsten Schritt weisen wir die Stabilitat von Rh nach. Mit Hilfe der inversen Beziehung, Satz
4.10, erhalten wir‖p‖∞;i
≤ ch−n/2‖p‖2;ifur alle p ∈ P1(i)
34

und mit der Definition von pi in (4.22),
‖pi‖2∞;i
≤ ch−n‖pi‖22;i
≤ ch−n‖v‖1;i‖pi‖∞;i
,
sowie unter Verwendung der Holderschen Ungleichung
|pi(Pi)| ≤ ch−n/q‖v‖q;. (4.24)
Aus der Regularitat der Unterteilung folgt
‖Dkϕi‖∞;Λ ≤ ch−k, k = 0, 1. (4.25)
Die Abschatzungen (4.24) und (4.25) liefern gerade die Stabilitat des Operators,
‖DkRhv‖q;Λ ≤ ch−k‖v‖q; fur alle v ∈ H l,q(). (4.26)
Abgesehen davon, daß kein Referenzelement verwendet wird, verlauft der Rest des Beweises genausowie der von Satz 4.6. Nach den Lemmata 4.2 und 4.3 gibt es ein Polynom p ∈ P1() mit
‖Dj(v − p)‖q; ≤ chl−j‖Dlv‖q; 0 ≤ j ≤ l ≤ 2. (4.27)
Aus (4.23) und (4.26) erhalten wir
‖Dk(v −Rhv)‖q;Λ ≤ ‖Dk(v − p)‖q;Λ + ‖DkRh(v − p)‖q;Λ ≤ c
l∑
j=0
hj−k‖Dj(v − p)‖q;.
Die Abschatzung (4.27) beweist nun den Satz.
Der Approximationsoperator von Scott-Zhang Zu jedem Pi ∈ Π wahlen wir eine (n − 1)-Seitenflache σi der Unterteilung mit Pi ∈ σi. Wenn Pi ein Randpunkt ist, so verlangen wir σi ⊂ ∂Ω.Die Knotenpunkte adjazent zu σi bezeichnen wir mit Pi,1, . . . , Pi,n mit Pi = Pi,1. Die Restriktion aufσi der Basisfunktionen zu diesen Punkten bezeichnen wir mit ϕi,1, . . . , ϕi,n. Durch Orthonormalisierungerhalten wir die duale Basis ψi,jj=1,...,n auf σi mit ψi,j ∈ P1(σi) und
∫
σi
ψi,j(s)ϕi,k(s) ds = δjk, j, k = 1, . . . , n. (4.28)
Mit ψi = ψi,1 haben wir∫
σi
ψi(s)ϕj(s) ds = δij , j, k = 1, . . . , n. (4.29)
fur jede Basisfunktion ϕj von S.Der Approximationsoperator Rh ist definiert durch
Rhv(x) =
N∑
i=1
ϕi(x)
∫
σi
ψi(s)v(s) ds. (4.30)
Rh ist stetig definiert fur Sobolev Funktionen mit Spur in L1(σi), denn wegen Satz 3.15 gilt
‖Rh‖∞;Ω ≤ c(h)‖v‖l,q;Ω, l = 1, 2, 1 ≤ q ≤ ∞,
Ferner gilt Rhv = 0 auf ∂Ω fur v ∈ H l,q0 (Ω).
Die Konsistenz des Operators Rh auf S erhalt man leicht aus (4.30), denn fur vh ∈ S gilt vh =∑N
i=1 vh(Pi)ϕi und daher
Rhvh(x) =
N∑
i=1
ϕi(x)vh(Pi) = vh(x).
Zum Beweis der Stabilitat schatzen wir zunachst den Term ‖ψi‖∞;σiab. Durch Rotation von σi,
konnen wir σi ⊂ Rn−1 voraussetzen. Da σi regular ist, gibt es eine affin lineare Abbildung Fi : σ → σi,wobei σ ⊂ Rn−1 das Einheitsdreieck fur n = 3 und das Intervall [0, 1] fur n = 2 ist. Fur die MatrixB ⊂ R(n−1)×(n−1) erhalten wir aus (4.17)
| detB|−1 ≤ ch−(n−1). (4.31)
35

Die Gleichungen∫
σi
ψj(s)ϕk(s) ds = δjk
transformieren sich zu∫
σ
ψj(s)ϕk(s) detB ds = δjk.
Durch Vergleich mit der dualen Basis ψj auf σ folgt
∫
σ
ψj(s)ϕk(s) ds = δjk,
also ψi detB = ψj und wegen (4.31),
‖ψi‖∞;σi≤ ch−(n−1). (4.32)
Fur Λ ∈ Π sei Λ die Vereinigung aller Simplizes Λj mit σi ⊂ Λj fur Pi ∈ Λ. Mit den Abschatzungen
‖Dkϕi‖q;Λ ≤ ch−k+n/q, k = 0, 1,
erhalten wir aus (4.30) und (4.32)
‖DkRhv‖q;Λ ≤ maxi
‖Dkϕi‖q;Λ
∑
σi⊂Λ
‖ψi‖∞;σi‖v‖1;σi
(4.33)
≤ ch−k+n/q−(n−1)∑
σi⊂Λ
‖v‖1;σi.
Sei Λi ∈ Π ein Element mit σi ⊂ Λi und sei Fi : Λ → Λi die affin lineare Abbildung auf dem Einheits-simplex Λ. Mit den Abschatzungen (4.18), (4.19) und dem Spursatz 3.15 auf Λ folgt
‖v‖1;σi≤ chn−1
∫
σ
|v(s)| ds ≤ chn−1‖v‖l,q;Λ ≤ chn−1−n/ql∑
j=0
hj‖Djv‖l,q;Λi
und daher wegen (4.33),
‖DkRhv‖q;Λ ≤ ch−kl∑
j=0
hj‖Djv‖q;. (4.34)
Wegen Rhvh = vh und (4.34) erhalten wir mit gleichem Beweis wie bei Satz 4.12
Satz 4.13 Seien k, l ∈ N0, q ∈ R mit 0 ≤ k ≤ l ≤ 2, l ≥ 1, 1 ≤ q ≤ ∞. Dann gilt fur alle v ∈ H l,q()die Abschatzung
‖Dk(v −Rhv)‖q;Λ ≤ chl−k‖Dlv‖q;
mit c unabhangig von Λ, h und v.
36

5 Elliptische Gleichungen zweiter Ordnung
5.1 Allgemeine Konvergenzsatze
Bereits im ersten Kapitel haben wir gesehen, daß ein Finite Elemente Raum nichtkonform sein kann,daß also Vh 6⊂ V gilt. In diesem Fall ist die Finite Elemente Methode kein Ritzsches Verfahren mehr,sodaß der einfache Konvergenzbeweis aus Abschnitt 3.8 nicht verwendet werden kann. Der folgendeabstrakte Konvergenzsatz ist fur sich genommen kein tiefes Resultat, aber er gestattet die Analyse auchkomplizierter Elemente und Verfahren.
Fur h > 0 seien Sh, Vh normierte Raume von Funktionen, die auf Gebieten Ωh ⊂ Rn definiert sind.Es wird vorausgesetzt, daß die Sh endlich dimensional sind und daß Sh und Vh eine gemeinsame Norm‖·‖h besitzen. In den spater folgenden Anwendungen der abstrakten Theorie wird Sh ein Finite ElementeRaum sein und Vh erhalt man durch Einschrankung und/oder Fortsetzung der Losung des kontinuierlichenProblems auf Ωh. Da die so modifizierte kontinuierliche Losung nun gar kein Problem mehr ”lost”, istes nur konsequent, daß in der abstrakten Theorie das kontinuierliche Problem nicht mehr vorkommt. Essei in diesem Zusammenhang auch an das im zweiten Kapitel Gesagte erinnert, daß namlich Konvergenznur aus den Eigenschaften des Verfahrens folgt und mit dem kontinuierlichen Problem nichts zu tun hat.
Seien Bilinearformen ah : Sh × Sh → R, ah : (Sh + Vh) × (Sh + Vh) → R gegeben. Die Form ah seiregular in dem Sinn, daß es eine Konstante m > 0 gibt, sodaß zu jedem vh ∈ Sh ein wh ∈ Sh, ‖wh‖h = 1,existiert mit
m‖vh‖h ≤ ah(vh, wh). (5.1)
Diese Bedingung ist aquivalent zur gleichmaßigen Regularitat der Steifigkeitsmatrix A mit Elementenaij = ah(φj , φi). Fur die zweite Bilinearform setzen wir lediglich die Beschranktheit
ah(u, v) ≤M‖u‖h‖v‖h ∀u, v ∈ Sh + Vh (5.2)
voraus. Ferner definieren wir fur lineare Funktionale fh(·) auf Sh die diskreten Probleme
Gesucht ist uh ∈ Sh mit ah(uh, vh) = fh(vh) ∀vh ∈ Sh. (5.3)
Aufgrund der Regularitat der Steifigkeitsmatrix ist die Losung dieses Problems eindeutig bestimmt.
Satz 5.1 Seien die Voraussetzungen (5.1) und (5.2) erfullt. Dann gilt fur die Losung uh von (5.3) undfur ein beliebiges u ∈ Vh die folgende Abschatzung
‖u− uh‖h ≤c infvh∈Sh
‖u− vh‖h + supwh∈Sh
|ah(vh, wh) − ah(vh, wh)|
‖wh‖h
+ c supwh∈Sh
|ah(u, wh) − fh(wh)|
‖wh‖h
mit c = c(m,M).
Beweis: Nach Bedingung (5.1) gibt es zu beliebigem vh ∈ Sh ein wh ∈ Sh mit ‖wh‖h = 1 und
m‖uh − vh‖h ≤ ah(uh − vh, wh).
Mit der Definition von uh in (5.3) folgt daraus
m‖uh − vh‖2h ≤ fh(wh) − ah(vh, wh) + ah(vh, wh) + ah(u− vh, wh) − ah(u, wh). (5.4)
Wir verwenden Bedingung (5.2),
ah(u− vh, wh) ≤M‖u− vh‖h‖wh‖h = M‖u− vh‖h,
und erhalten nach einer Umgruppierung der Terme in (5.4)
m‖uh − vh‖h ≤M‖u− vh‖h + supwh∈Sh
|ah(vh, wh) − ah(vh, wh)|
‖wh‖h
+ supwh∈Sh
|ah(u, wh) − fh(wh)|
‖wh‖h.
37

Mit der Dreiecksungleichung‖u− uh‖h ≤ ‖u− vh‖h + ‖uh − vh‖h
folgt die Behauptung.Ein haufig vorkommender Spezialfall von Satz 5.1 liegt vor, wenn die Steifigkeitsmatrix gleichmaßig
positiv definit ist, also die Bedingung
m‖vh‖2 ≤ ah(vh, vh) ∀vh ∈ Sh, (5.5)
die naturlich (5.1) impliziert, erfullt ist.Wenn das kontinuierliche Problem ebenfalls mit einer Bilinearform ah(·, ·) definiert ist, so kann der
Term
supwh∈Sh
|ah(vh, wh) − ah(vh, wh)|
‖wh‖h
als Konsistenz der Bilinearformen angesehen werden, der Term
supwh∈Sh
|ah(u, wh) − fh(wh)|
‖wh‖h
ist dann die Konsistenz der rechten Seite fh.Falls eine konforme Methode vorliegt, also Sh ⊂ V und ‖ · ‖h = ‖ · ‖V , der Raum Vh nicht von h
abhangt und ein kontinuierliches Problem
a(u, v) = f(v) ∀v ∈ V,
gestellt ist, so reduziert sich Satz 5.1 auf
Satz 5.2 (Erstes Strang Lemma)
‖u− uh‖V ≤c infvh∈Sh
‖u− vh‖V + supwh∈Sh
|a(vh, wh) − ah(vh, wh)|
‖wh‖V
+ c supwh∈Sh
|f(wh) − fh(wh)|
‖wh‖V.
5.2 Lineare Finite Elemente
Als eine erste Anwendung der abstrakten Theorie betrachten wir das einfachste Finite Elemente Verfah-ren zur Approximation elliptischer Differentialgleichungen zweiter Ordnung. Sei Ω ⊂ Rn, n = 2, 3, einbeschranktes Lipschitz Gebiet. Sei
Lu = f in Ω, u = 0 auf ∂Ω, (5.6)
wobei an den OperatorLu = −Dj(aij(x)Diu)
die folgenden Beschranktheits- und Elliptizitatsbedingungen vorausgesetzt werden,
aij ∈ H1,p(Ω), i, j = 1, . . . , n, p > n, (5.7)
m|ξ|2 ≤ aijξiξj ≤M |ξ|2 ∀ξ ∈ Rn. (5.8)
Nach dem Sobolevschen Einbettungssatz 3.13 gilt aij ∈ L∞(Ω). Mit
a(u, v) =
∫
Ω
aijDiuDjv dx
erhalten wir aus (5.8)|a(u, v)| ≤ c‖Du‖2;Ω‖Dv‖2;Ω ∀u, v ∈ H1,2
0 (Ω) (5.9)
m‖Du‖22;Ω ≤ a(u, u) ∀u ∈ H1,2
0 (Ω). (5.10)
Aus dem Satz von Lax-Milgram 3.18 folgt, daß die schwache Losung u ∈ H1,20 (Ω) zu (5.6) mit
a(u, v) = (f, v) ∀v ∈ H1,20 (Ω), (5.11)
38

existiert und eindeutig bestimmt ist.Sei Π eine Unterteilung von Ω in Simplizes Λ, die der Bedingung R aus dem ersten Kapitel genugt.
Weiter setzen wir Ωh = ∪Λ und bezeichnen den Raum der stetigen, stuckweise linearen Finiten Ele-mente, die am Rande von Ωh verschwinden, mit S0. Wir setzen voraus, daß es fur die Daten des zuapproximierenden Problems aij , f Fortsetzungen aij , f auf ein großeres Gebiet Ω ⊃ Ωh gibt mit
‖aij‖1,p;Ω ≤ c‖aij‖1,p;Ω, ‖f‖2;Ω ≤ c‖f‖2;Ω. (5.12)
Ferner wird vorausgestzt, daß auch die fortgesetzten Koeffizienten aij der Elliptizitatsbedingung (5.8)
auf Ω genugen.Offenbar kann f einfach durch die Nullfunktion fortgesetzt werden. Da man bei der Fortsetzung
der Koeffizienten auch die schwache Differenzierbarkeit erhalten muß, ist hier die Konstruktion einesFortsetzungsoperators schwieriger, siehe z.B. [1].
Die Finite Elemente Methode ist nun definiert durch
Gesucht ist uh ∈ S0 mit ah(uh, vh) = fh(vh) ∀vh ∈ S0, (5.13)
wobei
ah(uh, vh) =
∫
Ωh
aijDiuhDjvh dx, fh(vh) =
∫
Ωh
f vh dx.
In dieser Form wird man die Methode in der Praxis nicht anwenden, da es ja einen entscheidenden Un-terschied macht, ob ein Fortsetzungsoperator existiert oder ob man ihn tatsachlich berechnen kann. EineAlternative ist hier die Verwendung von Kubaturformeln, die nur Eckpunkte als Aufpunkte verwenden(siehe Abschnitt 5.3). Ferner sei angemerkt, daß unser Problem mehr Modellcharakter hat. In der Praxishangen die Koeffizienten nicht vom Ort ab oder sind stuckweise konstant. In diesen Fallen ergibt sich derFortsetzungsoperator von selbst.
Wir wollen lineare Konvergenz fur dieses Verfahren beweisen und mussen dabei berucksichtigen, daßim allgemeinen weder Ωh ⊂ Ω noch Ω ⊂ Ωh gelten wird. Wir setzen daher voraus, daß es eine Fortsetzungu ∈ H2,2(Ω) von u gibt mit
‖u‖2,2;Ω ≤ c‖u‖2,2;Ω. (5.14)
Ferner setzen wir voraus, daßmax
x∈∂Ωh
dist (x, ∂Ω) ≤ ch2 (5.15)
gilt. Im Falle n = 2 ist diese Bedinung erfullt, wenn der Rand von Ω stuckweise C2 ist und die Ecken von ΩKnotenpunkte der Triangulierung sind. In diesem Fall kann namlich das Koordinatensystem lokal gedrehtwerden, sodaß der Abstand zwischen ∂Ω und ∂Ωh als Fehler eines eindimensionalen Interpolationspro-blems mit stetigen, stuckweise linearen Elementen dargestellt wird. Nach Kapitel 4 kann der Fehler durchch2 abgeschatzt werden. Bei dreidimensionalen Gebieten mit stuckweise glattem Rand benotigt manzusatzlich eine analoge Bedingung fur die Kanten.
Satz 5.3 Seien die Voraussetzungen (5.7), (5.8), (5.12), (5.14), (5.15) erfullt. Dann gilt die Fehler-abschatzung
‖u− uh‖1,2;Ωh≤ ch‖u‖2,2;Ω,
wobei c nicht von u, f and h abhangt.
Der Beweis dieses Satzes ist zwar nicht schwer, aber langwierig. Wir beginnen mit einem Lemma, daßfur die Abschatzung von Termen uber die Randstreifen Ω \ Ωh oder Ωh \ Ω nutzlich ist.
Lemma 5.4 Sei Bedingung (5.15) erfullt. Fur alle v ∈ H1,1(Ω) gilt dann die Abschatzung
∫
Ωs
|v| dx ≤ ch2
∫
Ω
|v| + |Dv| dx,
wobei Ωs eine der Mengen Ω \ Ωh oder Ωh \ Ω bezeichnet.
Beweis: Zuerst wird eine eindimensionale Abschatzung gezeigt. Fur f ∈ C1([0, 1]) erhalten wir ausdem Hauptsatz
f(x) =
∫ x
y
f ′(ξ) dξ + f(y) ∀x, y ∈ [0, 1],
daher
39

|f(x)| ≤
∫ 1
0
|f ′(ξ)| dξ + |f(y)|.
Diese Beziehung wird bezuglich y von 0 bis 1 integriert und bezuglich x von 0 nach a, 0 < a ≤ 1,
∫ a
0
|f(x)| dx ≤ a
∫ 1
0
|f ′(x)| + |f(x)| dx. (5.16)
Da Ω als Lipschitz vorausgesetzt war, kann ∂Ω mit offenen Mengen U1, . . . , UN uberdeckt werden,sodaß nach einer Drehung des Koordinatensystems ∂Ω∩Ui als eine Lipschitzfunktion gi der n−1 Variableny′ = (y1, . . . , yn−1) ∈ U ′
i ⊂ Rn−1 dargestellt werden kann. Sei
Si,t = (y′, yn) : gi(y′) − t < yn < gi(y
′), y′ ∈ U ′i.
Dann gilt (Ω \Ωh) ∩Ui ⊂ Si,c1h2 , wobei c1 von gi, aber nicht von h abhangt. Ferner gibt es ein T, sodaßSi,T ⊂ Ω fur alle i.
U
S
'
i,t
i
δΩ
Fig. 5.1
Transformation von (5.16) auf das Intervall [0, T ] liefert fur genugend kleines h
∫ c1h2
0
|f(x)| dx ≤ ch2
∫ T
0
|f ′(x)| + |f(x)| dx.
Fur v ∈ C1(Ω) wenden wir diese Abschatzung auf die gedrehte Funktion v(y′, x) an und erhalten ausdem Satz von Fubini
∫
Si,c1h2
|v(y)| dy ≤ ch2
∫
Ω
|Dnv(y)| + |v(y)| dy
Da C1(Ω) dicht in H1,1(Ω) liegt, wird der Satz durch Summation bezuglich i fur Ωs = Ω \ Ωh bewiesen.Der Fall Ωs = Ωh \ Ω kann genauso behandelt werden.
Satz 5.3 wird nun mit Hilfe von Satz 5.1 bewiesen. Wir wahlen Sh = S0, Vh = H1,2(Ωh), ‖ · ‖h =‖ · ‖1,2;Ωh
und
ah(u, v) = ah(u, v) =
∫
Ωh
aijDiuDjv dx.
Die Bedingungen (5.1) und (5.2) lassen sich leicht mit der Elliptizitat und der Beschranktheit der Koef-fizienten aij nachweisen. In Satz 5.1 setzen wir vh = Ihu und erhalten aus der Interpolationsabschatzungund (5.14)
‖u− Ihu‖1,2;Ωh≤ ch‖D2u‖2;Ωh
≤ ch‖u‖2,2;Ω.
Zur Behandlung des letzten Terms in Satz 5.1 verwenden wir partielle Integration
ah(u, wh) =
∫
Ωh
aijDiuDjwh dx =
∫
Ωh
gwh dx
wobei g = −Dj(aijDiu). Wegen g = f = f in Ω ist
ah(u, wh) − fh(wh) =
∫
Ωh\Ω
g − fwh dx. (5.17)
40

Durch Fortsetzung von wh durch 0 außerhalb von Ωh folgt aus Lemma 5.4
∫
Ωh\Ω
|wh|2 dx ≤ ch2
∫
Ωh
|D(wh)2| + |wh|2 dx ≤ ch2‖wh‖
21,2;Ωh
und daher
|ah(u, wh) − fh(wh)| ≤ ‖g − f‖2;Ωh\Ω‖wh‖2;Ωh\Ω (5.18)
≤ ch‖g‖2;Ω + ‖f‖2;Ω‖wh‖1,2;Ωh.
Es verbleibt die Abschatzung von ‖g‖2;Ω. Mit der Leibniz Formel gilt
‖Dj(aijDiu)‖2;Ω ≤ ‖aijDij u‖2;Ω + ‖DjaijDiu‖2;Ω
und wegen der Sobolev Einbettung H1,p → L∞ fur p > n,
‖aijDij u‖2;Ω ≤ c‖D2u‖2;Ω.
Fur den zweiten Term auf der rechten Seite verwenden wir die Holdersche Ungleichung 1.6
∫
Ω
|Daij |2|Du|2 dx ≤
(
∫
Ω
|Daij |p dx
)2/p(∫
Ω
|Du|2p/(p−2) dx)
p−2
p
= c‖Du‖22p/(p−2);Ω
.
Wegen 2pp−2 <
2nn−2 fur p > n und der Sobolev Ungleichung gilt
‖DaijDu‖2;Ω ≤ c‖u‖2,2;Ω.
Diese Abschatzungen werden in (5.18) eingesetzt,
|ah(u, wh) − fh(wh)| ≤ ch‖u‖2,2;Ω + ‖f‖2;Ω‖wh‖1,2;Ωh
≤ ch‖u‖2,2;Ω + ‖f‖2;Ω‖wh‖1,2;Ωh≤ ch‖u‖2,2;Ω‖wh‖1,2;Ωh
,
Damit ist Satz 5.3 bewiesen.
5.3 Finite Elemente mit Kubaturformeln
In diesem Abschnitt wollen wir Finite Elemente Verfahren untersuchen, bei denen die Integrale zur Be-rechnung der Steifigkeitsmatrix und der rechten Seite nicht exakt ausgewertet werden, sondern stattdessenKubaturformeln verwendet werden.
Fur eine beschrankte und abgeschlossene Menge Λ ⊂ Rn besteht eine Kubaturformel aus AufpunktenP1, . . . , PN ∈ Rn und Gewichten ω1, . . . , ωN ∈ R, die so gewahlt werden, daß der Ausdruck
IΛ(u) = µ(Λ)N∑
i=1
ωiu(Pi) (5.19)
eine Naherung fur∫
Λ u(x) dx darstellt.
Definition 5.5 Eine Kubaturformel heißt von der Ordnung m, wenn alle Polynome in Pm exakt inte-griert werden.
Eine Formel der Ordnung großer gleich Null erfullt daher notwendig die Bedingung∑N
i=1 ωi = 1. Ausdiesem Grunde ist als Zusatzbedingung die Positivitat der Formel erwunscht, also ωi > 0, weil dadurch dieGewichte klein bleiben und die Auswertung der Kubaturformel numerisch stabiler ist. Mit der Ordnungder Kubaturformel verhalt es sich ahnlich wie mit der Ordnung des Interpolationsproblems: Die Ordnung
41

gibt an, wie schnell bei kleiner werdendem Durchmesser von Λ die Formel gegen das exakte Integralstrebt.
a123
(1)
ω1=1, m=1
a1
a2
a3(2)
ωi=1---3 , m=1
a12
a13a23
(3)
ωi=1---3 , m=2
Fig. 5.2
Von den in Fig. 5.2 angegebenen Kubaturformeln laßt sich die erste fur allgemeine Gebiete verwenden:Wertet man eine Funktion im Schwerpunkt aus und multipliziert das Ergebnis mit dem Maß des Gebietes,so erhalt man eine Formel, die auf allen linearen Funktionen exakt ist.
Um die Verwendung der Kubaturformeln auch theoretisch zu untersuchen, gehen wir von Problem(5.6) unter den Voraussetzungen (5.7) und (5.8) aus. Die schwache Losung ist gegeben durch
a(u, v) = (f, v) ∀v ∈ H1,20 (Ω), (5.20)
Zur Vereinfachung der folgenden Abschatzungen setzen wir Ω als konvexes Polyedergebiet des R2 oderR3 voraus. Π sei wieder eine Zerlegung in Simplizes und mit S0 bezeichnen wir den Raum der stetigen,stuckweise linearen Elemente mit Nullrandbedingung.
Die einfachste Finite Elemente Methode mit Verwendung einer Kubaturformel ist gegeben durch:
Gesucht ist uh ∈ S0 mit ah(uh, vh) = fh(vh) ∀vh ∈ S0, (5.21)
wobei
ah(uh, vh) =∑
Λ
IΛ(aijDiuhDjvh), fh(vh) =∑
Λ
IΛ(fvh),
und IΛ eine Kubaturformel bezeichnet.
Satz 5.6 Sei u ∈ H2,2(Ω) die Losung von (5.20) und seien die Funktionen aij , f stetig und auf jedemDreieck Λ differenzierbar mit beschrankten Ableitungen. Wenn die Kubaturformel von der Ordnung m ≥ 0ist und positive Gewichte besitzt, so gilt fur das Verfahren (5.21) die Fehlerabschatzung
‖u− uh‖1,2;Ω ≤ ch.
Wir beweisen den Satz mit dem ersten Strang-Lemma 5.2, wobei in diesem Spezialfall die Bilinearformah mit der Form a ubereinstimmt.
Als erstes zeigen wir die diskrete Definitheit (5.5). Da die Kubaturformel positive Gewichte besitzt,gilt
m|Dvh(Pk)|2 ≤ aij(Pk)Divh(Pk)Djvh(Pk), k = 1, . . . , Nund daher
m
∫
Λ
|Dvh(x)|2 dx ≤ IΛ(aijDivhDjvh).
Die beiden nachsten Voraussetzungen des Strang-Lemmas bezuglich der Konsistenz der Bilinearformenund der rechten Seiten beweisen wir im folgenden ahnlich wie die Interpolationsfehlerabschatzung durchUbergang auf das Referenzelement und anschließender Transformation.
Sei IΛ die entsprechende Kubaturformel auf dem Einheitsdreieck Λ. Weiter sei
EΛ(v) =
∫
Λ
v dx− IΛ(v)
das zugehorige Fehlerfunktional. Dieses ist linear und stetig auf C0(Λ), also auch auf H1,∞(Λ). Da dieFormeln aus Fig. 5.2 von 0-ter Ordnung sind, gilt EΛ(c) = 0 und nach dem Bramble-Hilbert-Lemma 4.4
|EΛ(v)| ≤ c‖Dv‖∞;Λ. (5.22)
42

Lemma 5.7 Fur p, q ∈ P1(Λ) gilt
(i) |EΛ(aDipDj q)| ≤ c‖Da‖∞;Λ‖Dp‖2;Λ‖Dq‖2;Λ fur a ∈ C1(Λ),
(ii) |EΛ(f p)| ≤ c(‖Df‖∞;Λ‖p‖1;Λ + ‖f‖∞;Λ‖Dp‖1;Λ) fur f ∈ C1(Λ).
Beweis: (i) Aus (5.22) folgt unmittelbar
|EΛ(aDipDj q)| ≤ c‖D(aDipDj q)‖∞;Λ ≤ c‖Da‖∞;Λ‖Dip‖∞;Λ‖Dj q‖∞;Λ.
Die behauptete Abschatzung ergibt sich aus der letzten Formel aufgrund der Aquivalenz der Normen imendlichdimensionalen Raum.
(ii) Wie in (i) folgt
|EΛ(f p)| ≤ c‖D(f p)‖∞;Λ ≤ c(‖Df‖∞;Λ‖p‖1;Λ + ‖f‖∞;Λ‖Dp‖1;Λ).
Den Raum der stetigen und auf jedem Λ differenzierbaren Funktionen versehen wir mit der Norm
‖v‖′1,∞;Ω = ‖v‖∞;Ω + maxΛ
‖Dv‖∞;Λ.
Lemma 5.8 Seien die Voraussetzungen von Satz 5.6 erfullt. Dann gelten fur alle vh, wh ∈ S0 dieAbschatzungen
(i) |a(vh, wh) − ah(vh, wh)| ≤ chmaxij
‖aij‖′1,∞;Ω‖Dvh‖2;Ω‖Dwh‖2;Ω
(ii) |(f, wh) − fh(wh)| ≤ ch‖f‖′1,∞;Ω‖Dwh‖2;Ω
Beweis: Wir transformieren die im vorigen Lemma bewiesenen Abschatzungen auf ein Element Λ. Mitden im 4. Kapitel gezeigten Transformationsregeln gilt dann
|EΛ(aDipDjq)| ≤ ch‖Da‖∞;Λ‖Dp‖2;Λ‖Dq‖2;Λ,
|EΛ(fp)| ≤ ch(‖f‖∞;Λ‖Dp‖1;Λ + ‖Df‖∞;Λ‖p‖1;Λ).
Wir summieren uber alle Λ und erhalten (i) aus der Cauchy-Ungleichung
∑
Λ
‖Dvh‖2;Λ‖Dwh‖2;Λ ≤(
∑
Λ
‖Dvh‖22;Λ
)1/2(∑
Λ
‖Dwh‖22;Λ
)1/2= ‖Dvh‖2;Ω‖Dwh‖2;Ω.
Die Abschatzung (ii) folgt aus der Ungleichung ‖Dvh‖1;Ω ≤ c‖Dvh‖2;Ω.Der Beweis von Satz 5.6 ist mit diesem Lemma schnell erbracht, indem wir im Strang-Lemma 5.2 vh = Ihuwahlen. Mit einer Konstanten c, die von u, aij und f abhangt, folgt dann
‖u− uh‖1,2;Ω ≤ c‖D(u− uh)‖2;Ω ≤ ch+ ch‖DIhu‖2;Ω + ch ≤ ch(1 + ‖Du−DIhu‖2;Ω + ‖Du‖2;Ω) ≤ ch.
Wie wir spater sehen werden, konvergiert die Finite Elemente Methode in der L2-Norm in vielen Fallenquadratisch in h. Um solche Resultate auch bei der Verwendung von Kubaturformeln zu bekommen,benotigt man jedoch Formeln von mindestens erster Ordnung.
5.4 Ein nichtkonformes Verfahren
In diesem Abschnitt untersuchen wir ein nichtkonformes Verfahren zur Approximation von Problem (5.6)unter den Voraussetzungen (5.7) und (5.8). Zusatzlich sei Ω ein zweidimensionales konvexes Polygonge-biet. Π sei eine Triangulierung von Ω und mit S0 bezeichnen wir den nichtkonformen Raum stuckweiselinearer Elemente aus Fig. 4.3, 5), die in den Seitenmitten auf dem Rande verschwinden. Dieser Raum isterstens nichtkonform bei der Diskretisierung von Problemen zweiter Ordnung, weil die Ansatzfunktionennicht schwach differenzierbar sind. Er ist weiter nichtkonform bezuglich der Randbedingung, die nichtexakt erfullt wird.
Die Bilinearform
a(u, v) =
∫
Ω
aijDiuDjv dx ∀u, v ∈ H1,20 (Ω)
43

wird auf H1,20 (Ω) + S0 fortgesetzt durch
ah(u, v) =∑
Λ
∫
Λ
aijDiuDjv dx ∀u, v ∈ H1,20 (Ω) + S0.
Damit ist das nichtkonforme Verfahren definiert durch
Gesucht ist uh ∈ S0 mit ah(uh, vh) = (f, vh) ∀vh ∈ S0. (5.23)
Fur dieses Verfahren wollen wir wieder lineare Konvergenz in h bezuglich der Energie-Norm ‖ · ‖h =ah(·, ·)1/2 zeigen. Dazu sei u ∈ H2,2(Ω) die Losung von (5.6) und die Koeffizienten aij seien differenzierbarmit beschrankten Ableitungen.
Als erstes verschaffen wir uns eine Fehlerbeziehung, indem wir die Gleichung Lu = f mit einemvh ∈ S0 multiplizieren und integrieren:
(f, vh) = −∑
Λ
∫
Λ
Dj(aijDiu)vh dx
=∑
Λ
∫
Λ
aijDiuDjvh dx−∑
Λ
∫
∂Λ
njaijDiuvh dσ.
Da der erste Summand auf der rechten Seite mit ah(u, vh) ubereinstimmt, erhalten wir durch Subtraktionmit (5.23)
ah(u− uh, vh) =∑
Λ
∫
∂Λ
njaijDiuvh dσ ∀vh ∈ S0. (5.24)
Die rechte Seite von (5.24) zeigt sehr schon, daß man im nichtkonformen Verfahren im Grunde genommeneine gestorte Gleichung diskretisiert. Das nachste Lemma gibt eine Abschatzung fur diese Storung.
Lemma 5.9 Sei u ∈ H2,2(Ω) und aij ∈ H1,∞(Ω). Dann gilt
∣
∣
∣
∑
Λ
∫
∂Λ
njaijDiuvh dσ∣
∣
∣ ≤ ch‖u‖2,2;Ω‖vh‖h.
Beweis: Jede im Inneren von Ω gelegene Kante der Triangulierung kommt in den Randintegralen uber∂Λ genau zweimal vor, wobei der zugehorige Normaleneinheitsvektor jeweils entgegengesetztes Vorzeichenhat. Wir konnen daher fur jede Kante einen Normaleneinheitsvektor fixieren und die Randintegrale inder Form
∑
Γ
∫
Γ
njaijDiu[vh] dσ
schreiben, wobei [vh] den ”Sprung” von vh bezeichnet, also
[vh](σ) =
vh|Λ1(σ) − vh|Λ2
(σ) σ ∈ Γ ⊂ Ω
vh(σ) σ ∈ Γ ⊂ ∂Ω.
Aufgrund der Stetigkeitsbedingung an die Ansatzfunktionen beziehungsweise der Nullrandbedingung amRande gilt nun [vh](P ) = 0 fur alle Seitenmitten P und damit
∫
Γ
[vh](σ) dσ = 0. (5.25)
Sei Γ eine beliebige im Inneren von Ω gelegene Kante mit anliegenden Dreiecken Λ1,Λ2. Unser nachstesZiel ist der Beweis der Abschatzung
∣
∣
∣
∫
Γ
njaijDiu[vh] dσ∣
∣
∣ ≤ ch‖u‖2,2;Λ1(‖Dvh‖2;Λ1
+ ‖Dvh‖2;Λ2). (5.26)
Dazu verwenden wir die Referenzkonfiguration (Λ1, Λ2, Γ), wobei Λ1 das Einheitsdreieck und Λ2 dasan der x2-Achse gespiegelte Einheitsdreieck ist, Γ ist dann der erste Abschnitt auf der x2-Achse. DieNormalenrichtung auf Γ wird als Einheitsvektor e1 festgelegt. Diese Referenzkonfiguration laßt sich durch
44

eine stetige, auf jedem Λi lineare Abbildung auf das Tripel (Λ1,Λ2,Γ) abbilden. Uberdies gelten die ausdem 4. Kapitel bekannten Transformationsregeln fur diese Abbildung.
Mit (5.25) und dem Spursatz erhalten wir fur eine beliebige Konstante c ∈ R∫
Γ
njaijDiu[v1] dσ =
∫
Γ
(njaijDiu− c)[v1] dσ ≤ c‖njaijDiu− c‖1,2;Λ1‖[v1]‖2;Γ.
Den ersten Faktor auf der rechten Seite schatzen wir mit der Poincare-Ungleichung 4.3 ab,
‖njaijDiu− c‖1,2;Λ1≤ c‖D(njaijDiu)‖2;Λ1
.
Fur den zweiten Faktor verwenden wir
‖[v1]‖2;Γ ≤ c(‖Dv1‖2;Λ1+ ‖Dv1‖2;Λ2
).
Da die rechte Seite keine Norm ist, muß zum Beweis genauer argumentiert werden. Wenn die rechte Seite0 ist, so folgt v1 = c1 in Λ1 sowie v1 = c2 in Λ2. Aufgrund der Stetigkeitsbedingung ist aber c1 = c2,also [v1] = 0. Daher ist die rechte Seite eine Norm auf dem Quotientenraum bezuglich [v1] = 0 und dieAbschatzung ist bewiesen.
Insgesamt haben wir auf der Referenzkonfiguration gezeigt:
∣
∣
∣
∫
Γ
njaijDiu[v1] dσ∣
∣
∣ ≤ c‖D(njaijDiu)‖2;Λ1(‖Dv1‖2;Λ1
+ ‖Dv1‖2;Λ2).
Diese Abschatzung wird auf das Tripel (Λ1,Λ2,Γ) transformiert, dabei erhalten wir als Faktor fur dasKantenintegral 1 (h fur Di und h−1 fur dσ) und fur das Produkt der Normen auf der rechten Seite h (hfur ‖D(njaijDiu)‖2;Λ1
und 1 fur ‖Dv1‖2;Λi). Damit ist (5.26) bewiesen.
Wir summieren (5.26) uber alle Kanten, verwenden auf der rechten Seite die Cauchy-Ungleichung underhalten so die behauptete Abschatzung.Aus (5.24) folgt
|ah(u − uh, vh)| ≤ ch‖u‖2,2;Ω‖vh‖h ∀vh ∈ S0.
Mit dieser Abschatzung laßt sich leicht eine Energie-Abschatzung durchfuhren:
‖u− uh‖2h = ah(u− uh, u− uh) ≤ ah(u − uh, u− Ihu) + ch‖u‖2,2;Ω‖Ihu− uh‖h
≤ ‖u− uh‖h‖u− Ihu‖h + ch‖u‖2,2;Ω(‖Ihu− u‖h + ‖u− uh‖h)
≤ ch‖u‖2,2;Ω‖u− uh‖h + ch2‖u‖22,2;Ω.
5.5 L2-Fehlerabschatzungen
Wir nennen ein Verfahren quasioptimal in einer Norm, wenn die Ordnung des Verfahrensfehlers mitder bestmoglichen Approximationsordnung ubereinstimmt. Schon in einer Raumdimension konnen wirhochstens lineare Konvergenz in H1,2 fur die Bestapproximierende im Raum der stuckweise linearenSplines erzielen, wie schon das Beispiel u(x) = x2 zeigt. Damit sind alle bisher betrachteten Verfahrenquasioptimal in der Energienorm. Da der Interpolationsfehler in L2 eine Ordnung besser ist als in derEnergie, stellt sich die Frage, ob man fur die Finite Elemente Methode in L2 ein besseres Konvergenzre-sultat bekommen kann, was auch von großem praktischen Wert ware. Vom Standpunkt der klassischennumerischen Analysis scheint eine solche bessere Fehlerordnung unmoglich zu sein, da das Finite Elemen-te Verfahren bei nicht gleichformiger Triangulierung nur von erster Ordnung konsistent ist und es bei denDifferenzenverfahren kein Beispiel gibt, bei dem die Konvergenzordnung die Konsistenzordnung ubert-rifft. Wie wir gleich sehen werden, stellt die Finite Elemente Methode in dieser Hinsicht eine Ausnahmedar. Trotzdem ist die Quasioptimalitat in L2 nicht so sicher zu erreichen, wie eine Konvergenzordnung,die sozusagen durch die Konsistenzordnung gestutzt wird.
Wir setzen Ω ⊂ Rn, n = 2, 3, als konvexes Polygongebiet voraus und betrachten das Problem
−∆u = f in Ω, u = 0 auf ∂Ω. (5.27)
Bei der Gewinnung von L2-Fehlerabschatzungen spielt die Regularitat des Problems ein wichtige Rolle,sie ist uns auch fruher begegnet, als wir an die Losung u gewisse Differenzierbarkeitsforderungen gestellthaben, ohne darauf einzugehen, wann diese erfullt werden konnen. Hierzu eine prazise Definition:
45

Definition 5.10 Sei L ein Differentialoperator zweiter Ordnung. L heißt m-regular, m ≥ 2, wenn furalle f ∈ Hm−2,2(Ω) die Losungen von Lu = f in Ω, u = 0 auf ∂Ω, im Raum Hm,2(Ω) liegen und derAbschatzung
‖u‖m,2;Ω ≤ c‖f‖m−2,2 + c‖u‖1,2;Ω (5.28)
genugen.
Die Definiton ist so formuliert, daß sie auch bei nichteindeutiger Losung angewendet werden kann. BeimLaplace-Operator kann der Summand ‖u‖1,2;Ω durch ‖f‖m−2,2 abgeschatzt werden, sodaß er entfallenkann.
In der Literatur sind viele Regularitatsergebnisse bekannt, die grob gesprochen darauf hinauslaufen,daß man Regularitat hat, wenn die Daten des Problems (Koeffizienten des Operators, Rand des Gebietes)genugend glatt sind. Beispielsweise ist ein elliptischer Operator in Divergenzform 2-regular, wenn dieKoeffizienten im Raum H1,p(Ω) liegen und der Rand des Gebietes Ω zweimal stetig differenzierbar ist (s.[12]). Ein anderes, fur uns wichtigeres Resultat ist die 2-Regularitat des Laplace-Operators auf konvexemGebiet (s. z.B. [9]).
Zur Diskretisierung von Problem (5.27) verwenden wir den Raum S0 der stetigen, stuckweise linearenElemente mit Nullrandbedingung. Sei uh ∈ S0 die Losung des Problems
(Duh, Dvh) = (f, vh) ∀vh ∈ S0. (5.29)
Satz 5.11 Fur die Losungen der Probleme (5.27) und (5.29) gelten die Fehlerabschatzungen
‖Dk(u− uh)‖2;Ω ≤ ch2−k‖f‖2;Ω, k = 0, 1.
Beweis: Aus der Energieabschatzung und der 2-Regularitat des Laplace-Operators auf konvexemGebiet erhalten wir
‖D(u− uh)‖2;Ω ≤ ch‖u‖2,2;Ω ≤ ch‖f‖2;Ω.
Zum Nachweis der L2-Fehlerordnung sei w ∈ H1,20 (Ω) die eindeutig bestimmte Losung des Hilfsproblems
(Dv,Dw) = (u− uh, v) ∀v ∈ H1,20 (Ω). (5.30)
Aufgrund der 2-Regularitat gilt die Abschatzung
‖w‖2,2;Ω ≤ c‖u− uh‖2;Ω (5.31)
Wir setzen v = u− uh in (5.30) ein und erhalten mit der Orthogonalitatsrelation (D(u− uh), Dvh) = 0
‖u− uh‖22;Ω = (D(u − uh), Dw) = (D(u − uh), D(w − Ihw))
≤ c‖u− uh‖1,2;Ω‖w − Ihw‖1,2;Ω ≤ ch‖w‖2,2;Ω‖u− uh‖1,2;Ω.
Mit (5.31) folgt‖u− uh‖
22;Ω ≤ ch‖u− uh‖2;Ω‖u− uh‖1,2;Ω.
5.6 Allgemeine Randbedingungen
In diesem Abschnitt wollen wir die Finite Elemente Methode fur das gemischte Randwertproblem
−∆u = f in Ω, u = g auf ΓD, Dnu = h auf ΓN (5.32)
studieren. ΓD, ΓN ist dabei eine Partition des Randes ∂Ω. Fur g = h = 0 laßt sich dieses Problemso interpretieren, daß wir eine auf ΓD eingespannte Membran durch eine Kraft f belasten, wobei dieMembran in ΓN eben nicht eingespannt ist und dort frei beweglich ist. Die Randbedingung Dnu =0 auf ΓN ist also physikalisch gar nicht begrundet, ΓN mußte gerade durch die vollige Abwesenheitirgendeiner Randbedingung charakterisiert sein. Die Losung des Ratsels findet man durch das Studiumdes zugehorigen Variationsproblems: Gesucht ist u ∈ H1,2
0,ΓD(Ω) mit
F (v) =
∫
Ω
1
2|Dv|2 − fv
dx → min (5.33)
46

unter allen v ∈ H1,20,ΓD
. H1,20,ΓD
(Ω) ist die Vervollstandigung von
C∞0,ΓD
(Ω) = v ∈ C∞(Ω) : v = 0 in einer Umgebung von ΓD
in der Norm ‖ · ‖1,2. Anschaulich besteht der Raum H1,20,ΓD
(Ω) aus den H1,2-Funktionen, die, sofern ΓD
genugend glatt ist, auf ΓD den Randwert 0 annehmen.Im folgenden nehmen wir an, daß ΓD eine (n−1)-dimensionale Mannigfaltigkeit mit positivem (n−1)-
dimensionalen Maß umfaßt. Dann laßt sich die Poincare-Ungleichung
‖v‖2;Ω ≤ c‖Dv‖2;Ω ∀v ∈ H1,20,ΓD
(Ω) (5.34)
beweisen.Nach dem Rieszschen Darstellungssatz hat (5.33) eine eindeutige Losung u ∈ H1,2
0,ΓD(Ω), die durch die
Variationsgleichung(Du,Dv) = (f, v) ∀v ∈ H1,2
0,ΓD(Ω) (5.35)
charakterisiert ist. Wie wir gleich sehen werden, steckt in dieser Gleichung die naturliche Randbedingungin einer versteckten und schwachen Form. Wenn wir annehmen, daß u ∈ C2(Ω) ∩C1(Ω), so kann man in(5.35) fur v ∈ C∞
0 (Ω partielle Integration anwenden und erhalt
(−∆u, v) = (f, v) ∀v ∈ C∞0 (Ω)
nach dem Fundamentallemma also−∆u = f in Ω.
Nun setzen wir v ∈ C∞0,ΓD
(Ω) in (5.35) ein und es ergibt sich wieder mit partieller Integration
(−∆u, v) +
∫
ΓN
Dnuv dσ = (f, v) ∀v ∈ C∞0,ΓD
(Ω)
Wegen −∆u = f folgt hieraus∫
ΓN
Dnuv dσ = 0 ∀v ∈ C∞0,ΓD
(Ω)
und, sofern ΓN glatt ist,Dnu = 0 auf ΓN .
Generell laßt sich hieraus der Schluß ziehen, daß bei Abwesenheit einer erzwungenen Randbedingungdie Kenntnis der Differentialgleichung zur Bestimmung der naturlichen Randbedingung nicht genugt,sondern ein Variationsprinzip oder eine Variationsgleichung wie (5.35) erforderlich ist. Als Beispiel dazubetrachten wir die Bilinearform
a(u, v) = (Du,Dv) + (D1u, v) + (u,D1v)
und das Problema(u, v) = (f, v) ∀v ∈ H1,2
0,ΓD(Ω).
Wenn wir hier mit v ∈ C∞0 (Ω) testen, so gilt
a(u, v) = −(∆u, v) + (D1u, v) − (D1u, v) = −(∆u, v) = (f, v),
also −∆u = f. Die Bestimmung der naturlichen Randbedingung wie vorher fuhrt nun auf
Dnu+ n1u = 0 auf ΓN .
Mit dieser Hintergrundinformation ist die Diskretisierung von (5.32) durch ein Finite Elemente Ver-fahren ganz einfach.
Um die Notation nicht zu sehr aufzublahen, nehmen wir an, daß Ω ein Polygongebiet ist und dieRandstucke ΓD, ΓN ebenfalls von polygonaler Form sind. Wir konnen dann Ω so triangulieren, daß dieRander von ΓD und ΓN sich aus Seitenflachen von Elementen zusammensetzen. Sei S der Raum derstetigen, stuckweise linearen Funktionen auf dieser Triangulierung. Setze
Sg,ΓD= vh ∈ S : vh(Pi) = g(Pi) fur alle Knotenpunkte Pi ∈ ΓD.
47

Das Finite Elemente Verfahren ist dann definiert durch: Gesucht ist uh ∈ Sg,ΓDmit
(Duh, Dvh) −
∫
ΓN
hvh dσ = (f, vh) ∀vh ∈ S0,ΓD.
Da die kontinuierliche Losung die Gleichung
(Du,Dv) −
∫
ΓN
hv dσ = (f, v) ∀v ∈ H1,20,ΓD
(Ω)
erfullt, ergibt die Subtraktion dieser Gleichungen die Fehlerbeziehung
(D(u − uh), Dvh) = 0 ∀vh ∈ S0,ΓD.
Da nun Ih(u− uh) ∈ S0,ΓDfolgt hieraus die Fehlerabschatzung
‖D(u− uh)‖22 = (D(u − uh), D((u − uh) − Ih(u− uh)))
= (D(u − uh), D(u − Ihu)) ≤ ‖D(u− uh)‖2‖D(u− Ihu)‖2.
Aufgrund der wechselnden Randbedingung wird die kontinuierliche Losung i.a. nicht im Raum H2,2(Ω)liegen. Wir konnen daher nur eine reduzierte Konvergenzordnung erwarten. Wenn beispielsweise n = 2und der Wechsel der Randbedingung auf einer geraden Linie erfolgt, so sind die Fehlerabschatzungen
‖D(u− uh)‖2 ≤ c(u)h1/2, ‖u− uh‖2 ≤ c(u)h
optimal.
48

6 Gemischte Verfahren
6.1 Das Stokes System
Sei Ω ⊂ Rn, n = 2, 3, ein beschranktes Gebiet. Wir betrachten ein inkompressibles Fluid in Ω mit Ge-schwindigkeit u = (u1, . . . un) und Druck p. Bei kleinen Daten laßt sich dies durch die Stokes-Gleichungen
−∆u+Dp = f in Ω, divu = 0 in Ω, u = g auf ∂Ω, (6.1)
beschreiben. f ist hier eine außere Kraft, beispielsweise die Schwerkraft. Die Randbedingung an u setztsich zusammen aus der homogenen Bedingung u = 0 entlang fester Wande und Ein- sowie Ausstrombe-dingung. Um letztere im Fall n = 2 zu bestimmen, betrachten wir eine Stromung im unendlich langenRohr Ω = R× (0, 1) mit u2(x1, x2) = 0 in Ω und u1(x1, 0) = u1(x1, 1) = 0. Aus den Stokes-Gleichungen(6.1) erhalten wir in diesem Spezialfall
−∆u1 +D1p = 0, D2p = 0, D1u1 = 0.
Aus den beiden letzten Gleichungen folgt
p = p(x1), u1 = u1(x2),also
−D22 2u
1(x2) +D1p(x1) = 0.
Da dies fur alle (x1, x2) ∈ Ω richtig sein soll, muß schon jeder einzelne dieser Terme einen konstantenWert besitzen. Daher nimmt die Stromung in einem unendlich langen Rohr ein quadratisches Profil an,
u1(x1, x2) = ax2(1 − x2), u2(x1, x2) = 0, p(x1, x2) = −2ax1.
Die mathematische Theorie der Stokes-Gleichungen (6.1) ist schwierig und kann hier nicht vollstandigwiedergegeben werden. Zunachst fallt auf, daß der Druck in (6.1) nur als erste Ableitung vorkommt, somitnur bis auf eine Konstante eindeutig sein kann. Wir tragen dem Rechnung, indem wir den Raum
L20(Ω) = q ∈ L2(Ω) :
∫
Ω
q dx = 0
verwenden. Die schwache Formulierung von (6.1) im Falle g = 0 lautet nun: Gesucht ist (u, p) ∈H1,2
0 (Ω)n × L20(Ω) mit
(Du,Dv) − (p, div v) = (f, v) ∀v ∈ H1,20 (Ω)n,
(divu, q) = 0 ∀q ∈ L20(Ω).
(6.2)
Die letzte Bedingung ist in der Tat aquivalent zu divu = 0, denn
(divu, 1) =
∫
Ω
divu dx =
∫
∂Ω
n · u dσ = 0.
Problem (6.2) laßt sich als notwendige Bedingung eines Sattelpunktproblems schreiben. Das Lagran-gefunktional
L(u, p) =
∫
Ω
1
2|Du|2 − p divu− fu dx
wird offenbar genau dann stationar in H1,20 (Ω)n × L2
0(Ω), wenn (6.2) erfullt ist. Da L in p affin linearist, handelt es sich hierbei nicht um ein Minimierungsproblem. Um die Stokes-Gleichungen auch alsnotwendige Bedingungen eines solchen zu schreiben, definieren wir den Raum
Vdiv = v ∈ H1,20 (Ω)n : div v = 0,
der ein abgeschlossener Unterraum von H1,20 (Ω)n und somit selber Hilbert Raum ist. Das Problem
F (u) =
∫
Ω
1
2|Du|2 − fu dx → Min
in Vdiv besitzt die notwendige Bedingung
(Du,Dv) = (f, v) ∀v ∈ Vdiv. (6.3)
49

Nach dem Rieszschen Darstellungssatz ist die Losung fur f ∈ L2(Ω)n eindeutig bestimmt. Weiter ist jedeLosung von (6.2) auch eine Losung von (6.3). Zum Nachweis einer Losung von (6.2) mussen wir also nochdie Existenz einer Druckfunktion beweisen, was bei weitem schwieriger zu bewerkstelligen ist und durchAuflosung von (6.2) nach dem Term (p, div ) geschieht: Gesucht ist p ∈ L2
0(Ω) mit
(p, div v) = g(v) ∀v ∈ H1,20 (Ω)n, (6.4)
wobei g(v) = (Du,Dv) − (f, v)
ein stetiges lineares Funktional auf H1,20 (Ω)n ist mit der Eigenschaft
g(v) = 0 ∀v ∈ Vdiv. (6.5)
Lemma 6.1 (Ladyzhenskaja) Sei Ω ein beschranktes Lipschitzgebiet. Sei g ein stetiges lineares Funk-tional auf H1,2
0 (Ω)n, fur das (6.5) erfullt ist. Dann gibt es ein eindeutig bestimmtes p ∈ L20(Ω), das der
Beziehung (6.4) sowie der Abschatzung
‖p‖2;Ω ≤ c‖Dp‖−1,2;Ω = c‖g‖(H1,20
)′ (6.6)
genugt.
Der Beweis ist sehr schwierig und findet sich vollstandig im Buch [11].Das obige Lemma liefert uns zusammen mit den bisherigen Uberlegungen einen Beweis des folgenden
Existenzsatzes:
Satz 6.2 Sei Ω ein Lipschitzgebiet und f ∈ L2(Ω)n. Dann gibt es eine eindeutige schwache Losung(u, p) ∈ H1,2
0 (Ω)n × L20(Ω) von (6.2) mit
‖u‖1,2;Ω + ‖p‖2;Ω ≤ c‖f‖2;Ω.
Wir bezeichnen die Stokes-Gleichungen als m-regular, wenn fur f ∈ Hm−2,2(Ω) die schwache Losung(u, p) im Raum Hm,2(Ω)n ×Hm−1,2(Ω) liegt und der Abschatzung
‖u‖m,2 + ‖p‖m−1,2 ≤ c‖f‖m−2,2
genugt.
Satz 6.3 (i) Wenn n = 2 und Ω ein konvexes Polygongebiet ist, so sind die Stokes-Gleichungen 2-regular.
(ii) Wenn ∂Ω ∈ Cm, so sind die Stokes-Gleichungen m-regular.
Der Beweis von (i) findet sich in [], fur (ii) siehe [11].
6.2 Abstrakte Sattelpunktprobleme
Seien V,X Hilbert Raume und a : V × V → R, b : V ×X → R Bilinearformen mit
m‖v‖2V ≤ a(v, v), m > 0, (6.7)
|a(u, v)| ≤ c1‖u‖V ‖v‖V , (6.8)
|b(v, q)| ≤ c2‖v‖V ‖q‖X . (6.9)
Wir behandeln das folgende Problem: Zu f ∈ V ′ und g ∈ X ′ finde (u, p) ∈ V ×X mit
a(u, v) + b(v, p) = f(v) ∀v ∈ V
b(u, q) = g(q) ∀q ∈ X.(6.10)
Falls a zusatzlich symmetrisch ist, so ist dieses Problem aquivalent dazu, das Funktional
L(u, p) =1
2a(u, u) + b(u, p) − f(u) − g(p)
in V ×X stationar zu machen, was wir hier jedoch nicht weiter verfolgen wollen.Den Bilinearformen konnen wir die Operatoren A : V → V ′, B : V → X ′, BT : X → V ′ zuordnen
durchAu(v) = a(u, v), Bu(p) = b(u, p), BT p(u) = b(p, u).
50

Da die Formen a und b als beschrankt vorausgesetzt werden, sind alle Operatoren auf den angegebenenBereichen linear und stetig. Problem (6.10) kann dann geschrieben werden als
Au +BT p = in V ′,
Bu = g in X ′.
Um Existenz von Losungen von (6.10) nachzuweisen, geht man ahnlich vor wie im letzten Abschnittbeschrieben. Da hier auch die Nebenbedingung inhomogen ist, benotigen wir zu ihrer Behandlung ei-ne Voraussetzung an B, die im vorigen Abschnitt erst spater verwendet wurde. Mit ImB und KerBbezeichnen wir Bild- bzw. Nullraum des Operators B.
Satz 6.4 Die folgenden Bedingungen sind aquivalent:
(i) ImB ist abgeschlossen in X ′,
(ii) ImBT ist abgeschlossen in V ′,
(iii) (KerB)0 = v′ ∈ V ′ :< v′, v >= 0 ∀v ∈ KerB = ImBT ,
(iv) (KerBT )0 = q′ ∈ X ′ :< q′, q >= 0 ∀q ∈ KerBT = ImB,
(v) Es gibt eine Konstante k0, sodaß fur jedes g ∈ ImB ein vg ∈ V existiert mit Bvg = g und ‖vg‖V ≤1k0‖g‖X′,
(vi) Es gibt eine Konstante k0, sodaß fur jedes f ∈ ImBT ein qf ∈ X existiert mit BT qf = f und‖gf‖X ≤ 1
k0‖f‖V .
Dieser Satz wird in jedem Buch uber Funktionalanalysis bewiesen. Die Bedingungen (v) und (vi) lassensich auch noch anders schreiben. Mit
‖v‖V \Ker B = infv0∈Ker B
‖v + v0‖V
bezeichnen wir die Norm auf dem Quotientenraum von V nach KerB. Dann sind (v) und (vi) aquivalentzu
(vii) k0‖v‖V \Ker B ≤ supq∈X
b(v, q)
‖q‖X
(viii) k0‖q‖X\Ker BT ≤ supv∈V
b(v, q)
‖v‖V.
Satz 6.5 Seien die Bedingungen (6.7) - (6.9) erfullt. Weiter sei ImB abgeschlossen in X ′ und g ∈ ImB.Dann hat das Problem (6.10) genau eine Losung (u, p) ∈ V ×X \KerBT mit
‖u‖V ≤1
m‖f‖V ′ +
1
k0(1 +
c1m
)‖g‖X′ ,
‖p‖X\Ker BT ≤1
k0(1 +
c1m
)‖f‖V ′ +c1k20
(1 +c1m
)‖g‖X′ .
Beweis: Nach (v) gibt es ein ug ∈ V mit Bug = g und ‖ug‖V ≤ 1k0‖g‖X′. Wir schreiben u = u0 + ug
und losenu0 ∈ KerB : a(u0, v) = f(v) − a(ug, v) ∀v ∈ KerB.
Nach dem Rieszschen Darstellungssatz ist u0 eindeutig bestimmt und genugt der Abschatzung
m‖u0‖2V ≤ a(u0, u0) = f(u0) − a(ug, u0) ≤ ‖f‖V ′‖u0‖V + c1‖ug‖V ‖u0‖V ′ ,
also
‖u0‖V ≤1
m‖f‖V ′ +
c1m‖ug‖V
und zusammen mit der Dreiecksungleichung
‖u‖V ≤ ‖u0‖V + ‖ug‖V ≤1
m‖f‖V ′ +
1
k0(1 +
c1m
)‖g‖X′ .
FurL(v) = f(v) − a(u, v)
51

gilt L ∈ V ′ und L(v) = 0 fur v ∈ KerB. Nach Satz (6.4) ist daher L ∈ ImBT = (KerB)0. Es gibt alsoein p ∈ X mit
b(v, p) = L(v) ∀v ∈ V,
und
‖p‖X\Ker BT ≤1
k0‖L‖V ′ ≤
1
k0(‖f‖V ′ + c1‖u‖V ).
Damit ist auch die Abschatzung fur p vollstandig bewiesen. Zu bemerken bleibt noch, daß p im allgemeinennicht eindeutig bestimmt ist. Jedes p ∈ X in der entsprechenden Aquivalenzklasse von X \KerBT erfulltnach Konstruktion
a(u, v) + b(v, p) = f(v) ∀v ∈ V
und ist daher eine Losung.Der Beweis des obigen Satzes zeigt, daß wir die Voraussetzungen an die Bilinearform a noch wesentlichabschwachen konnen. Tatsachlich genugt es, daß das Problem
u ∈ KerB : a(u, v) = f(v) ∀v ∈ KerB
losbar sein muß, wozu die Koerzivitat von a auf KerB ausreichend ist,
m‖v‖2 ≤ a(v, v) ∀v ∈ KerB, m > 0.
Wir konnen die obige Theorie auf das Stokes-Problem anwenden, indem wir setzen
V = H1,20 (Ω)n, X = L2(Ω),
a(u, v) = (Du, Dv), b(v, q) = −(div v, q), f(v) = (f, v), g(v) = (g, v)
fur f ∈ L2(Ω)n, g ∈ L2(Ω). Die Voraussetzungen von Satz 6.5 sind dabei - abgesehen von der Abgeschlos-senheit von B - trivialerweise erfullt. Der Operator B kann mit dem Divergenzoperator
div : H1,20 (Ω)n → L2(Ω), v 7→ div v,
identifiziert werden. Der harte analytische Kern der abstrakten Theorie ist der Nachweis, daß div surjektivnach L2
0(Ω) ist. Dies ist, sieht man einmal von einigen einfachen funktionalanalytischen Umformungenab, die Aussage von Lemma 6.1 .
6.3 Approximation abstrakter Sattelpunktprobleme
Wir betrachten nur den konformen Fall, in dem endlich dimensionale Ansatzraume Vh, Xh mit Vh ⊂ Vund Xh ⊂ X gegeben sind. Das diskrete Problem lautet dann: Gesucht ist (uh, ph) ∈ Vh ×Xh mit
a(uh, vh) + b(vh, ph) = f(vh) ∀vh ∈ Vh,
b(uh, qh) = g(qh) ∀qh ∈ Xh.(6.11)
Gehen wir zu einer Basisdarstellung dieses Systems uber, so besitzt es die Gestalt
(
Ah BTh
Bh 0
)(
u
p
)
=
(
f
g
)
,
wobei u, p die zugehorigen Koordinatenvektoren zu uh, ph sind. Im folgenden unterscheiden wir nichtimmer explizit zwischen einem Element aus Vh oder Xh und seinem Koordinatenvektor, insbesondere
KerBh = vh ∈ Vh : b(vh, qh) = 0 ∀qh ∈ Xh.
Die Konvergenztheorie fur dieses Verfahren ist in gewisser Weise schwieriger als die Existenztheorie fur daskontinuierliche Problem. Setzen wir namlich die Bedingungen (6.7) - (6.9) voraus, was wir im folgendenimmer tun werden, so ist die Abgeschlossenheit von ImBh im Endlichdimensionalen immer erfullt, sodaßnur die Bedingung G|Xh
∈ ImBh aus Satz (6.5) fraglich ist. Letztere hat es jedoch in sich, da es hierbeiauf beide Raume Xh und Vh ankommt. Aber selbst wenn die diskreten Losungen fur h → 0 existieren,brauchen sie nicht gegen die kontinuierliche Losung zu konvergieren. Auch kann es geschehen, daß zwaruh → u, aber ph nicht gegen p konvergiert. Wir wollen aber diesen Fall nicht explizit untersuchen undunsere Voraussetzungen so stellen, daß sie uns Konvergenz fur uh und ph garantieren.
52

Weiter benotigen wir das diskrete Gegenstuck zur Ladyzhenskaja-Bedingung, das in diesem Zusam-menhang Babuska-Brezzi-Bedingung genannt wird, namlich
kh‖qh‖X\Ker BTh≤ sup
vh∈Vh
b(vh, qh)
‖vh‖V(6.12)
mit einer Konstanten kh > 0.
Satz 6.6 Sei (u, p) eine Losung von (6.10) und (uh, ph) eine Losung von (6.11) . Ferner sei die Voraus-setzung (6.12) erfullt. Dann gelten die Fehlerabschatzungen
‖u− uh‖V ≤ (c+c
kh) inf
vh∈Vh
‖u− vh‖V + c infqh∈Xh
‖p− qh‖X , (6.13)
‖p− ph‖X\Ker BTh≤ (c+
c
kh) inf
qh∈Xh
‖p− qh‖X +c
kh‖u− uh‖V . (6.14)
mit c = c(m, c1, c2).
Beweis: Durch Subtraktion der Probleme (6.11) und (6.10) erhalten wir die Fehlerbeziehungen
a(u − uh, vh) + b(vh, p− ph) = 0 ∀vh ∈ V, (6.15)
b(u− uh, qh) = 0 ∀qh ∈ X. (6.16)
Mit Hilfe der Koerzivitat (6.7) und (6.15) gilt fur beliebiges vh ∈ Vh
m‖u− uh‖2V ≤ a(u− uh, u− uh) = a(u− uh, u− vh) + a(u − uh, vh − uh)
= a(u− uh, u− vh) − b(vh − uh, p− ph).
Fur den zweiten Term auf der rechten Seite folgt aus (6.16) fur beliebiges qh ∈ Xh, q0,h ∈ KerBTh
b(vh − uh, p− ph) = b(vh − uh, p− ph − q0,h) = b(vh − u, p− ph − q0,h) + b(u− uh, p− qh),
also insgesamt die Abschatzung
m‖u− uh‖2V ≤ c‖u− uh‖V ‖u− vh‖V + c‖u− vh‖V ‖p− ph‖X\Ker BT
h+ c‖u− uh‖V ‖p− qh‖X
≤ (c+c
ε)‖u− vh‖
2V +
m
2‖u− uh‖
2V + c‖p− qh‖
2X + ε‖p− ph‖X\Ker BT
h,
wobei ε > 0 spater genugend klein gewahlt wird. Wir subtrahieren den Term m2 ‖u− uh‖2
V und erhaltenmit Konstanten c = c(m, c1, c2)
‖u− uh‖2V ≤ (c+
c
ε)‖u− vh‖
2V + c‖p− qh‖
2X + ε‖p− ph‖
2X\Ker BT
h
. (6.17)
Zur Abschatzung des Terms ‖p − ph‖X\Ker BTh
verwenden wir die Babuska-Brezzi-Bedingung in derForm
‖p− ph‖X\Ker BTh≤ ‖p− qh‖X + ‖qh − ph‖X\Ker BT
h≤ ‖p− qh‖X +
1
khsup
vh∈Vh
b(vh, qh − ph)
‖vh‖V
≤ ‖p− qh‖X +1
khsup
vh∈Vh
b(vh, qh − p)
‖vh‖V+
1
khsup
vh∈Vh
b(vh, p− ph)
‖vh‖V.
Den zweiten Term auf der rechten Seite schatzen wir durch die Beschranktheit der Form b ab,
1
khsup
vh∈Vh
b(vh, qh − p)
‖vh‖V≤
c
kh‖p− qh‖X ,
und den dritten mit der Fehlerbeziehung (6.15)
1
khsup
vh∈Vh
b(vh, p− ph)
‖vh‖V= −
1
khsup
vh∈Vh
a(u − uh, vh)
‖vh‖V≤
c
kh‖u− uh‖V .
53

Damit ist die behauptete Abschatzung (6.14) bewiesen. Zum Nachweis von (6.13) setzen wir (6.14) in(6.17) ein und erhalten
‖u− uh‖2V ≤ (c+
c
ε)‖u− vh‖
2V + c‖p− qh‖ + ε(c+
c
k2h
)‖p− qh‖X + εc
k2h
‖u− uh‖V .
In dieser Abschatzung mussen wir ε = ηk2h wahlen mit genugend kleinem η, um den Term ‖u − uh‖2
V
auf die linke Seite zu bringen. Nach dem Wurzelziehen liefert dies die behauptete Abhangigkeit derKonstanten in (6.13) von kh.
Nach diesem Satz ist zu erwarten, daß das Verfahren nur dann quasioptimal in der Norm
‖[v, q]‖Wh=(
‖v‖2V + ‖q‖2
X\Ker BTh
)1/2
konvergieren wird, wenn die Konstanten kh gleichmaßig von 0 wegbeschrankt bleiben, also die Bedingung
kh ≥ k0 > 0
erfullt ist. Diese Bedingung ist aber nur sehr schwer nachzuweisen. Ein weiterer Nachteil der bisherigenTheorie ist die h-Abhangigkeit der Norm von Wh. Beide Probleme lassen sich in vielen Fallen einfachund elegant mit dem folgenden Lemma losen.
Lemma 6.7 Fur die Bilinearform b gelte die abgeschwachte Ladyzhenskaja-Bedingung
k‖qh‖X\Ker BT ≤ supv∈V
b(v, qh)
‖v‖V∀qh ∈ Xh.
Ferner gebe es einen linearen Operator Rh : V → Vh mit
b(Rhv − v, qh) = 0 ∀qh ∈ Xhund
‖Rhv‖V ≤ c3‖v‖V ∀v ∈ V
mit c3 unabhangig von h. Dann gilt
k
c3‖qh‖X\Ker BT ≤ sup
vh∈Vh
b(vh, qh)
‖vh‖V∀qh ∈ Xh. (6.18)
Beweis: Wir haben
supvh∈Vh
b(vh, qh)
‖vh‖V≥ sup
v∈V
b(Rhv, qh)
‖Rhv‖= sup
v∈V
b(v, qh)
‖Rhv‖≥ sup
v∈V
1
c3
b(v, qh)
‖v‖V≥
k
c3‖qh‖X\Ker BT .
Mit der Bedingung (6.18) laßt sich der Beweis von Satz 6.6 vollig analog durchfuhren und liefert die gleicheFehlerabschatzung, allerdings erhalten wir eine Konvergenzaussage fur ph → p in der Norm ‖ · ‖X\Ker BT
an Stelle von ‖ · ‖X\Ker BTh. Ferner ist das Verfahren nun quasioptimal in der Norm
‖[v, q]‖W = (‖v‖2V + ‖q‖2
X\Ker BT )1/2,
da kh ≥ kc3> 0.
In den meisten Fallen wird der Operator Rh in zwei Schritten konstruiert. Man verwendet dann dasfolgende Lemma.
Lemma 6.8 Seien die Voraussetzungen von Lemma (6.7) erfullt. Ferner seien R1, R2 : V → Vh lineareOperatoren mit
(i) ‖R1v‖V ≤ c‖v‖V ∀v ∈ V,
(ii) b(R2v − v, qh) = 0 ∀qh ∈ Xh,
(iii) ‖R2(Id−R1)v‖V ≤ c‖v‖V ∀v ∈ V.
Dann gilt die Babuska-Brezzi-Bedingung (6.18) .
Beweis: Mit Rhv = R2(v − R1v) + R1v lassen sich die Voraussetzungen von Lemma (6.7) leichtnachweisen:
b(Rhv, qh) = b(R2(v −R1v), qh) + b(R1v, qh)
= b(v −R1v, qh) + b(R1v, qh) = b(v, qh),
‖Rhv‖V ≤ ‖R2(v −R1v)‖V + ‖R1v‖V ≤ c‖v‖V .
54

6.4 Finite Elemente Approximation des Stokes-Problems
Fur endlich dimensionale Raume Xh ⊂ X = L2(Ω), Vh ⊂ V = H1,20 (Ω)n lautet das gemischte Verfahren
zur Approximation des Stokes-Problems: Gesucht ist (uh, ph) ∈ Vh ×Xh mit
(Duh, Dvh) − (div vh, ph) = (f, vh) ∀vh ∈ Vh,
(div vh, qh) = (g, qh) ∀qh ∈ Xh.(6.19)
Wir suchen Paare von Finite Elemente Raume Vh und Xh, sodaß die Voraussetzungen des Lemmas (6.8)erfullt werden konnen und somit die Babuska-Brezzi-Bedingung in der Form (6.18) gilt. Da die Bedin-gungen des Lemmas sehr abstrakt sind und sich von den konkreten Anforderungen eines konvergentenVerfahrens entsprechend weit entfernt haben, soll hier an Hand der Gleichung (6.19) erlautert werden,worauf es bei der Konstruktion der Raume Vh und Xh ankommt. Wir setzen
Vdiv,h = vh ∈ Vh : (div vh, qh) = 0 ∀qh ∈ Xh.
Falls wir eine Losung (uh, ph) von (6.19) haben, so ist uh auch eine Losung des folgenden Problems:Gesucht ist uh ∈ Vdiv,h mit
(Duh, Dvh) = f(vh) ∀vh ∈ Vdiv,h.
Dieser Konstruktion sind wir beim kontinuierlichen Problem bereits begegnet. Im Endlichdimensionalenhangt aber die Gestalt von Vdiv,h sowohl von Vh als auch von Xh ab. Daher besteht die Gefahr, den RaumXh zu groß zu wahlen und damit den Raum Vdiv,h so klein zu machen, daß er keine Approximierendevon u mehr enthalt. Es kommt bei den gemischten Verfahren sehr haufig vor, daß, falls ein Paar (Vh, Xh)nicht konvergiert, man den Raum Vh vergroßert bzw. Xh verkleinert. Dies soll nun mit stuckweise linearenElementen vorgefuhrt werden.
Sei Ω ⊂ Rn, n = 2, 3, ein Polyedergebiet und Π eine regulare Unterteilung von Ω in Simplizes Λ,sodaß Ω = ∪Λ. Mit S bezeichnen wir den Raum der stetigen, stuckweise linearen Elemente; S0 enthaltdie Elemente mit Nullrandbedingung. Die naturliche Wahl
Vh = Sn0 , Xh = S,
fuhrt nicht zum Ziel, weil man zeigen kann, daß Vdiv,h = 0. Um dennoch mit diesen Ansatzfunktionen zueiner konvergenten Approximation zu kommen, erweitern wir den Raum Vh durch sogenannte ”Bubble”-Funktionen, das sind nichtnegative Funktionen bΛ(x), deren Trager im Simplex Λ enthalten ist. Dieeinfachste und fur numerische Zwecke angenehmste Wahl besteht in den Polynomen
bΛ(x) =n+1∏
i=1
λi(x),
wobei λ1, . . . , λn+1 die baryzentrischen Koordinaten von Λ sind. Der Raum Vh ist dann definiert durch
Vh = vh ∈ C(Ω)n ∩H1,20 (Ω)n : vh|Λ ∈ (P1 ⊕ span bΛ)n.
Wir verwenden Lemma 6.8 zum Nachweis der Konvergenz dieses Elementes und mussen die angegebe-nen Operatoren R1, R2 konstruieren. Dazu verwenden wir den Approximationsoperator von Scott-Zhang,der auf Seite 35 beschrieben wird. Fur v ∈ H1,2
0 (Ω) gilt Rhv ∈ S0 mit
‖Dk(v −Rhv)‖2;Λ ≤ ch1−k‖Dv‖2;, k = 0, 1, (6.20)
wobei aus den Elementen adjazent zu Λ besteht. Wir setzen R1 = Rh und erhalten aus (6.20) fur k = 1mit der Dreiecksungleichung
‖DR1v‖2 ≤ c‖Dv‖2
und damit die erste Bedingung aus Lemma 6.8. Der OperatorR2 muß gemaß diesem Lemma so konstruiertwerden, daß
∫
Ω
div (R2v − v)qh dx =
∫
Ω
(v −R2v)Dqh dx = 0 ∀qh ∈ S.
Da Dqh stuckweise konstant ist, genugt es, die Bedingung
∫
Λ
(v −R2v) dx = 0 ∀Λ
55

zu erfullen. Der Operator R2 wird daher so gewahlt, daß er jede Komponente von v auf ein Vielfachesder Bubble-Funktion so abbildet, daß die Mittelwerte von v und R2v ubereinstimmen. Normieren wir dieBubble-Funktion auf Maximum c unabhangig von h, so gilt mit R2v|Λ = abΛ, a ∈ Rn,
|a| ≤ ch−n∣
∣
∣
∫
Λ
v dx∣
∣
∣ ≤ ch−n/2‖v‖2;Λ
und daher
‖R2v‖2;Λ ≤ c‖v‖2;Λ.
Zusammen mit der inversen Beziehung ergibt dies
‖DkR2v‖2;Λ ≤ ch−k‖v‖2;Λ, k = 0, 1. (6.21)
Die dritte Voraussetzung von Lemma (6.8) folgt nun aus (6.21) und (6.20) fur k = 0
‖DR2(Id−R1)v‖2;Λ ≤ ch−1‖v −R1v‖2;Λ ≤ c‖Dv‖2;U(Λ).
Damit ist die Fehlerabschatzung
‖u− uh‖1,2;Ω + ‖p− ph‖L2(Ω)\R ≤ ch‖u‖2,2;Ω + ‖p‖1,2;Ω
gezeigt. Da man durch diese Konstruktion das kleinste stetige Stokes-Element bekommt, hat sich hierfurdie Bezeichnung Mini-Element eingeburgert.
Eine andere Moglichkeit, vom ersten Versuch Vh = Sn0 , Xh = S, zu einem konvergenten Verfahren zu
kommen, besteht in der Verkleinerung des Raumes Xh. Im Falle n = 2 betrachtet man dazu eine regulareTriangulierung ΠH , die durch Verbinden der Seitenmitten zu einer Triangulierung Πh verfeinert wird.Mit der Wahl Vh = Sn
h,0, Xh = SH , erhalt man eine konvergente Diskretisierung, was man ganz analogzum Mini-Element beweist: Als Bubble-Funktion verwendet man einen Teil der Basisfunktionen, die aufder Triangulierung Πh neu hinzugekommen sind. Wir wollen auf eine genaue Konstruktion verzichten,weil dieses Verfahren wegen des hohen Programmieraufwandes nicht verwendet wird.
Nun betrachten wir Finite Elemente mit unstetigen Druckfunktionen im Falle n = 2 und beginnenmit der Wahl von Xh als Raum der stuckweise konstanten Funktionen auf einer regularen Triangulierungvon Ω. Der Raum Vh = Sn
0 ist auch hier wieder zu klein, ein konvergentes Verfahren erhalt man erst furVh = Sn
2,0, wobei S2,0 den Raum der stetigen, stuckweise quadratischen Elemente mit Nullrand bezeichnet.In der Literatur wird dies P2 −P0-Element genannt. Zum Konvergenzbeweis gehen wir zunachst genausowie beim Mini-Element vor, indem wir R1 = Rh setzen mit dem Operator Rh aus Satz 4.13 . Da Xh alsstuckweise konstant gewahlt wurde, muß der Operator R2 der Bedingung
∫
Λ
div (R2v − v) dx =
∫
∂Λ
(R2v − v) · n dσ = 0
auf jedem Dreieck Λ genugen. Wir erreichen dies, indem wir R2v = 0 an den Knotenpunkten setzen unddie Werte in den Seitenmitten so wahlen, daß
∫
E
R2v dσ =
∫
E
v dσ (6.22)
fur alle Kanten E erfullt ist. Um R2v auf einem Element Λ abzuschatzen, gehen wir vom ReferenzdreieckΛ aus und nehmen an, daß fur die Kanten E von Λ die Beziehung (6.22) erfullt ist. Da R2v an denKnotenpunkten verschwindet, folgt mit dem Spursatz
‖DR2v‖2;Λ ≤ c
3∑
i=1
∣
∣
∣
∫
Ei
v dσ∣
∣
∣ ≤ c‖v‖1,2;Λ.
Wir transformieren diese Abschatzung auf das Element Λ und erhalten
‖DR2v‖2;Λ ≤ ch−1‖v‖2;Λ + c‖Dv‖2;Λ.
Damit erhalten wir analog zum Mini-Element
‖DR2(Id−R1)v‖2;Λ ≤ ch−1‖v −R1v‖2;Λ + c‖D(v −R1v)‖2;Λ ≤ c‖Dv‖2;Λ.
56

Wir haben alle Voraussetzungen von Lemma (6.8) erfullt und erhalten die gleiche Konvergenzaussage wiebeim Mini-Element, namlich lineare Konvergenz fur die ersten Ableitungen von u und fur p. Dieses Re-sultat, das in der geringen Approximationsfahigkeit der stuckweise konstanten Funktionen begrundet ist,ist insofern enttauschend, als daß wir fur die Geschwindigkeit quadratische Ansatzfunktionen verwendethaben.
Um eine hohere Konvergenzordnung zu bekommen, wahlen wir Xh als stuckweise lineare, aber un-stetige Funktionen. Der Raum der quadratischen Funktionen wird wieder um die Bubble-Funktionenerganzt,
Vh = vh ∈ C(Ω)2 : vh|Λ ∈ (P2 ⊕ span bΛ)2 ∩H1,20 (Ω)2.
Man bezeichnet diese Wahl von (Vh, Xh) als Crouzeix-Raviart-Element. Wir zeigen eine quadratischeKonvergenzordnung fur dieses Paar von Raumen, indem wir die Voraussetzungen von Lemma 6.8 nach-weisen. Als R1 wahlen wir den OperatorR aus dem P2−P0-Element. R1 bildet daher auf die quadratischenSplines ab und hat die Eigenschaften
‖DR1v‖2;Ω ≤ c‖Dv‖2;Ω,
∫
Λ
div (v −R1v) dx = 0 ∀v ∈ V, ∀Λ ∈ Π.
Wir brauchen R2 nur fur Funktionen mit∫
Λdiv v dx = 0 zu definieren, da R2 nur auf v−R1v angewendet
wird. Sei also v ∈ V eine Funktion mit∫
Λ
div v dx = 0 ∀Λ.
Dann setzen wir R2v|Λ = abΛ, a ∈ R2, wobei a bestimmt wird aus
∫
Λ
div (abΛ − v)qh dx = 0 ∀qh ∈ P1(Λ).
Da die Divergenz von abΛ − v verschwindenden Mittelwert besitzt, ist diese Beziehung fur qh = 1 immererfullt. Aus
∫
Λ
abΛDqh dx =
∫
Λ
div vqh dx
entnehmen wir, indem wir qh = x1, x2 einsetzen, daß a eindeutig bestimmt ist. Durch Ubergang auf dasReferenzelement zeigt man
‖DR2v‖2;Λ ≤ c‖Dv‖2;Λ.
Damit ist die Fehlerabschatzung
‖u− uh‖1,2;Ω + ‖p− ph‖2;Ω ≤ ch2‖u‖3,2;Ω + ‖p‖2,2;Ω
bewiesen.
6.5 Statische Kondensation fur das Mini-Element
Wir kehren zuruck zum Mini-Element: Vh ist der um die Bubble-Funktionen erweiterte Raum der stetigen,stuckweise linearen Elemente mit Nullrandbedingung (n = 2, 3) und Xh = S. Der Einfachheit halberbetrachten wir nur die homogene Nebenbedingung divu = 0. Gesucht ist dann (uh, ph) ∈ Vh ×Xh mit
(Duh, Dvh) + (vh, Dph) = (f, vh) ∀vh ∈ Vh, (6.23)
(uh, Dqh) = 0 ∀qh ∈ Xh. (6.24)
Bezeichnen wir den Raum der vektorwertigen Bubble-Funktionen mit B, so gilt Vh = Sn0 ⊕ B. Entspre-
chend schreiben wir fur vh ∈ Vh,
vh = vl + vb mit vl ∈ Sn0 , vb ∈ B
Mit partieller Integration folgt nun
(Dvl, Dwb) =∑
Λ
∫
Λ
DvlDwb dx = −∑
Λ
∫
Λ
∆vlwb dx = 0 ∀vl ∈ Sn0 , wb ∈ B,
57

da vl linear auf jedem Λ ist. Wir testen die Gleichung (6.23) mit der Bubble-Funktion bΛ und erhalten
δΛβΛ =
∫
Λ
(f −Dph)bΛ dx
mit
δΛ =
∫
Λ
|DbΛ|2 dx
und βΛ ∈ R2 sind die Koeffizienten von uh bezuglich der Bubble-Funktionen auf Λ. Nehmen wir zusatzlichan, daß f stuckweise konstant ist, so folgt
δΛβΛ = γΛ(f −Dph)
mit
γΛ =
∫
Λ
bΛ dx.
Wir setzen die auf diese Weise gefundene Darstellung fur βΛ in die Nebenbedingung ein und erhalten mituh = ul + ub
(divul, qh) +∑
Λ
γΛ
δΛ(f −Dph)|Λ ·
∫
Λ
bΛDqh dx = 0 ∀qh ∈ Xh,
daher
(div ul, qh) +∑
Λ
α(Λ)
∫
Λ
(f −Dph)Dqh dx = 0 ∀qh ∈ Xh, (6.25)
wobei
α(Λ) =γ2Λ
δΛµ(Λ) ∼ h2
Zusammen mit(Dul, Dvl) + (vl, Dph) = (f, vl) ∀vl ∈ Sn
0 (6.26)
ist (6.25) aquivalent zum Ausgangsproblem (6.23), (6.24). Das System (6.25), (6.26) ist nur unter Ver-wendung stuckweise linearer Elemente formuliert und besitzt jetzt eine, wie man sagt, kunstliche Kom-pressibilitat oder Stabilisierung der Nebenbedingung.
58

Literatur
[1] Adams, R.A.: Sobolev Spaces, Academic Press, New York 1975
[2] Alt, H.W.: Lineare Funktionalanalysis, Springer 1985
[3] Apel, Th. – Dobrowolski, M.: Anisotropic interpolation with applications to the finite element me-thod, Computing 47, 277–293 (1992)
[4] Bank, R.E. – Weiser, A.: Some a posteriori error estimators for elliptic partial differential equations,Math. Comp. 44, 283–301 (1985)
[5] Braess, D.: Finite Elemente, Springer Verlag 1992
[6] Brezzi, F. – Fortin: Mixed and Hybrid Finite Element Methods, Springer, Berlin 1989
[7] Ciarlet, P.G.: The Finite Element Method for Elliptic Problems, North–Holland, Amsterdam 1978
[8] Clement, P.: Approximation by finite element functions using local regularization, RAIRO Anal.Numer. R–2, 77–84 (1975)
[9] Dobrowolski, M.: On the smoothness of elliptic variational problems in convex domains, BonnerMath. Sch. 228, 121–130 (1991)
[10] Dobrowolski, M.: Angewandte Funktionalanalysis, Springer 2006
[11] Galdi, G.P.: An Introduction to the Mathematical Theory of the Navier–Stokes Equations I, Springer1994
[12] Gilbarg, D. – Trudinger, N.S.: Elliptic Partial Differential Equations of Second Order, Grundlehrender math. Wiss. 224, Springer–Verlag, Berlin 1977
[13] Girault, V. – Raviart, P.A.: Finite Element Methods for Navier–Stokes Equations, Springer–Verlag1986
[14] Johnson, C.: Numerical Solution of Partial Differential Equations by the Finite Element Method,Cambridge University Press, Cambridge 1987
[15] Meyers N. – Serrin, J.: H=W, Proc. Nat. Acad. Sci. USA 51,1055-1056 (1964)
[16] Riesz, F. – Nagy, B.Sc.: Vorlesungen uber Funktionalanalysis, Deutscher Verlag der Wissenschaften1956
[17] Rudin, W.: Functional Analysis, Tata McGraw-Hill PC 1974
[18] Scott, L.R. – Zhang, S.: Finite element interpolation of nonsmooth functions satisfying boundaryconditions, Math. Comp. 54, 483–493 (1990)
[19] Stoer, J.: Einfuhrung in die Numerische Mathematik I, Springer–Verlag, Berlin 1983
[20] Stoer, J. – Bulirsch, R.: Einfuhrung in die Numerische Mathematik II, Springer–Verlag, Berlin 1973
[21] Strang, G. – Fix, E.: An analysis to the finite element method, Prentice-Hall Inc., Englewood Cliffs1973
[22] Temam, R.: Theory and Numerical Analysis of the Navier–Stokes Equations, North–Holland 1977
[23] Triebel, H.: Hohere Analysis, VEB Deutscher Verlag der Wissenschaften, Berlin 1972
[24] Walter, W.: Gewohnliche Differentialgleichungen, Heidelberger Taschenbucher 110, Springer-Verlag1972
59








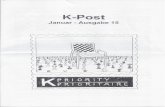


![LABORATÓRIO DE SISTEMAS MECATRÔNICOS E ROBÓTICA ] - LAB.pdf · Resistores - 1,0 Ω - 100k Ω 1,2 Ω - 120k Ω 1,5 Ω - 150k Ω 1,8 Ω- 180k Ω 2,2 Ω– 220k Ω 2,7 Ω– 270k](https://static.fdocument.org/doc/165x107/5c245c1a09d3f224508c4b48/laboratorio-de-sistemas-mecatronicos-e-robotica-labpdf-resistores-.jpg)