
Figuras do Livro Introdução à Análise Complexa, Séries de ...pgirao/book/book_figures.pdf ·...
70
Figuras do Livro Introdução à Análise Complexa, Séries de Fourier e Equações Diferenciais Pedro Martins Girão Departamento de Matemática Instituto Superior Técnico Julho de 2014
Transcript of Figuras do Livro Introdução à Análise Complexa, Séries de ...pgirao/book/book_figures.pdf ·...

Figuras do Livro
Introdução à Análise Complexa,
Séries de Fourier e Equações Diferenciais
Pedro Martins Girão
Departamento de Matemática
Instituto Superior Técnico
Julho de 2014
Capítulo 1
Números complexos
r
z
θ
ℜz
iℑz
θ = π2
θ = − π2
θ = 0
θ = π
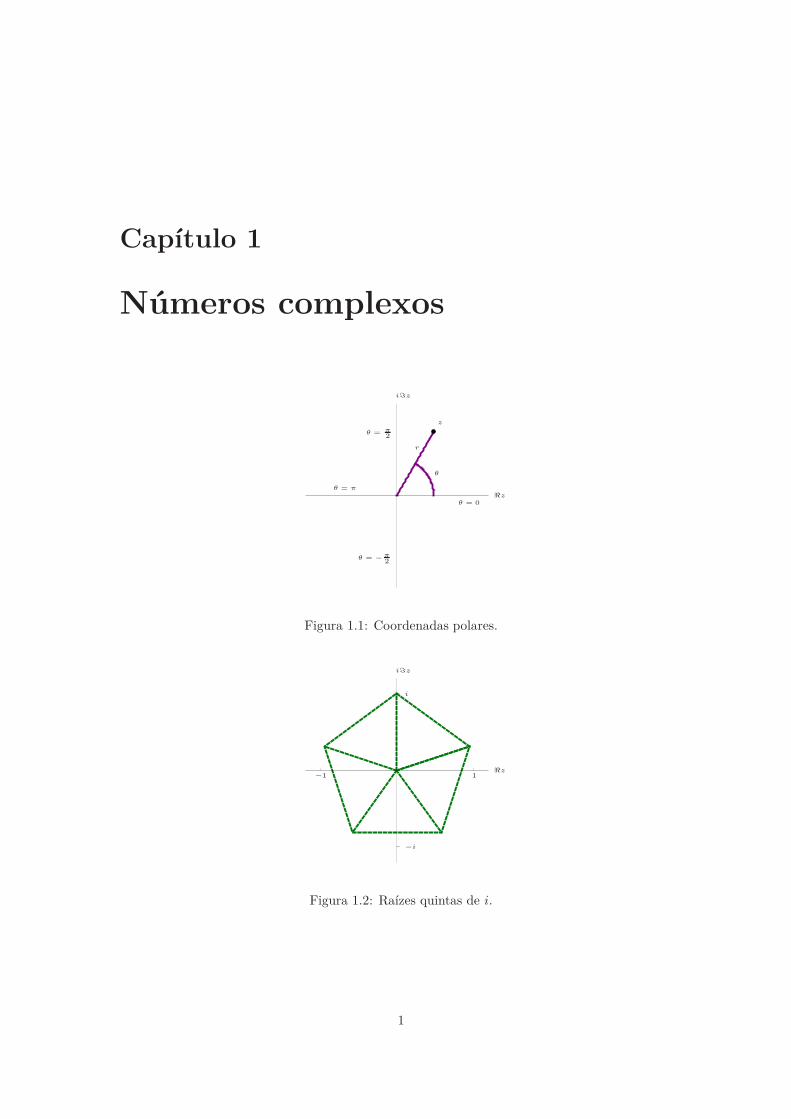
Figura 1.1: Coordenadas polares.
ℜz
iℑz
−1 1
−i
i
Figura 1.2: Raízes quintas de i.
1

Figura 1.3: Projeção estereográfica.
2
Capítulo 2
Funções complexas
z
1− 12
√2 z
√2−
√2
2
√2E
(
i π4
)
z
1
i
−1
−i
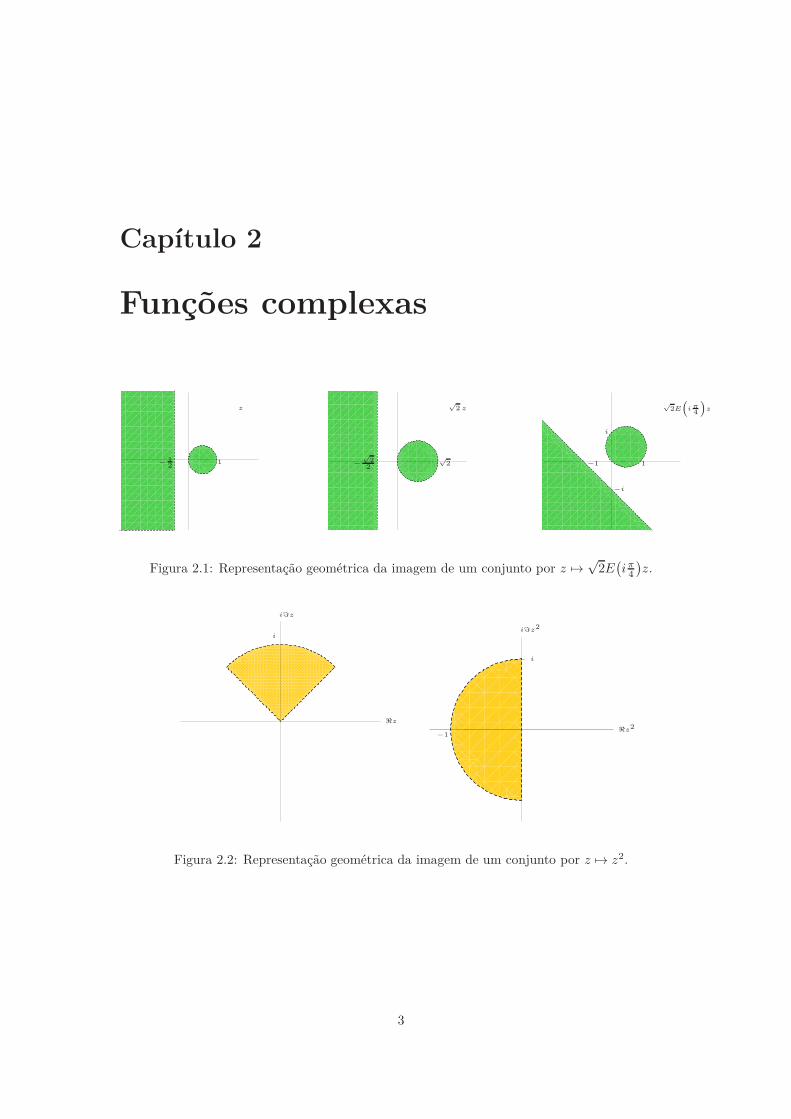
Figura 2.1: Representação geométrica da imagem de um conjunto por z 7→√
2E(
i π4
)
z.
ℜz
iℑz
i
ℜz2
iℑz2
−1
i
Figura 2.2: Representação geométrica da imagem de um conjunto por z 7→ z2.
3
π−π
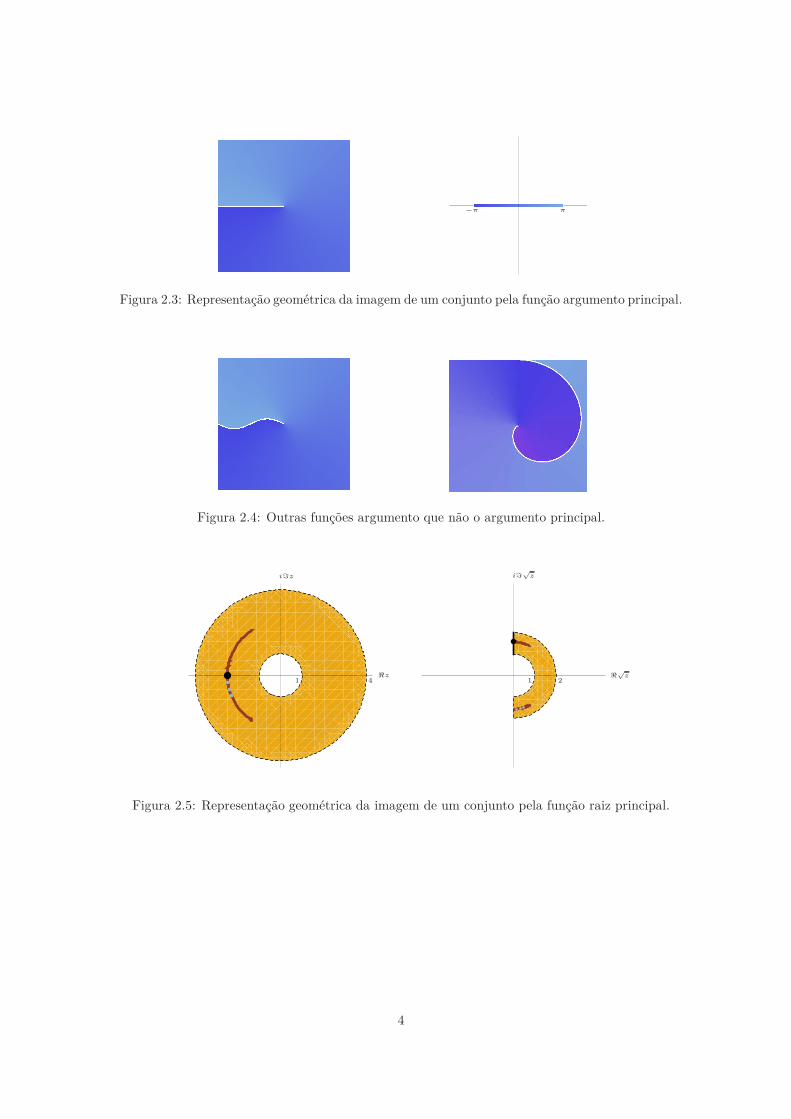
Figura 2.3: Representação geométrica da imagem de um conjunto pela função argumento principal.
Figura 2.4: Outras funções argumento que não o argumento principal.
ℜz
iℑz
41ℜ√
z
iℑ√z
21
Figura 2.5: Representação geométrica da imagem de um conjunto pela função raiz principal.
4
θ0
φ
φ
R
z
z∗
θ0
φ
φ
Rw
w∗
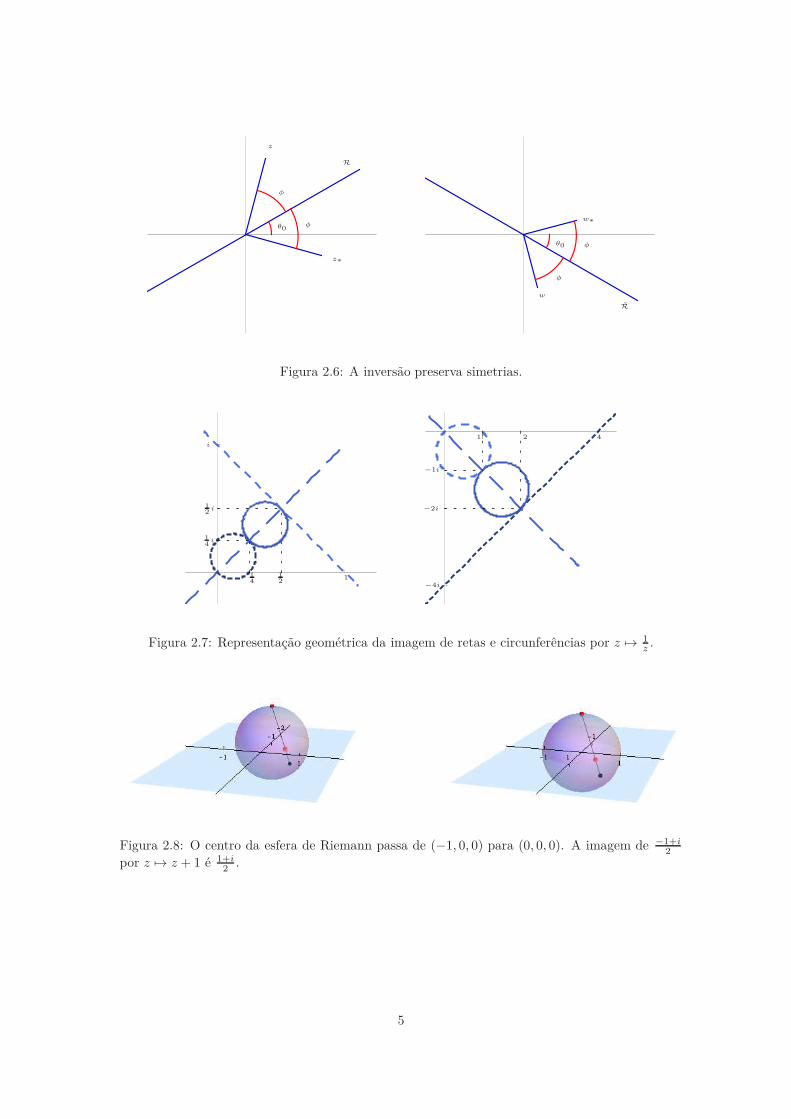
Figura 2.6: A inversão preserva simetrias.
14
12
1
14
i
12
i
i!1 2 4
−1i
−2i
−4i
Figura 2.7: Representação geométrica da imagem de retas e circunferências por z 7→ 1z.
Figura 2.8: O centro da esfera de Riemann passa de (−1, 0, 0) para (0, 0, 0). A imagem de −1+i2
por z 7→ z + 1 é 1+i2 .
5
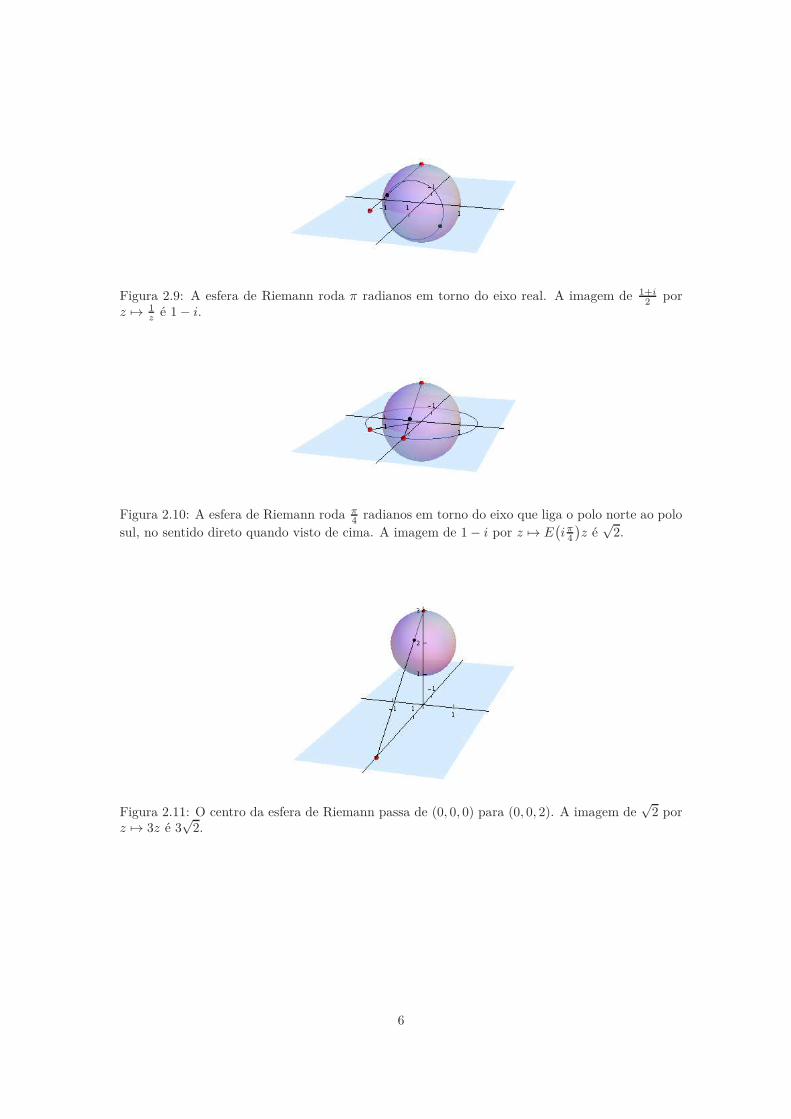
Figura 2.9: A esfera de Riemann roda π radianos em torno do eixo real. A imagem de 1+i2 por
z 7→ 1z
é 1 − i.
Figura 2.10: A esfera de Riemann roda π4 radianos em torno do eixo que liga o polo norte ao polo
sul, no sentido direto quando visto de cima. A imagem de 1 − i por z 7→ E(
i π4
)
z é√
2.
Figura 2.11: O centro da esfera de Riemann passa de (0, 0, 0) para (0, 0, 2). A imagem de√
2 porz 7→ 3z é 3
√2.
6
1ℜz
iℑz
112
ℜw
iℑw
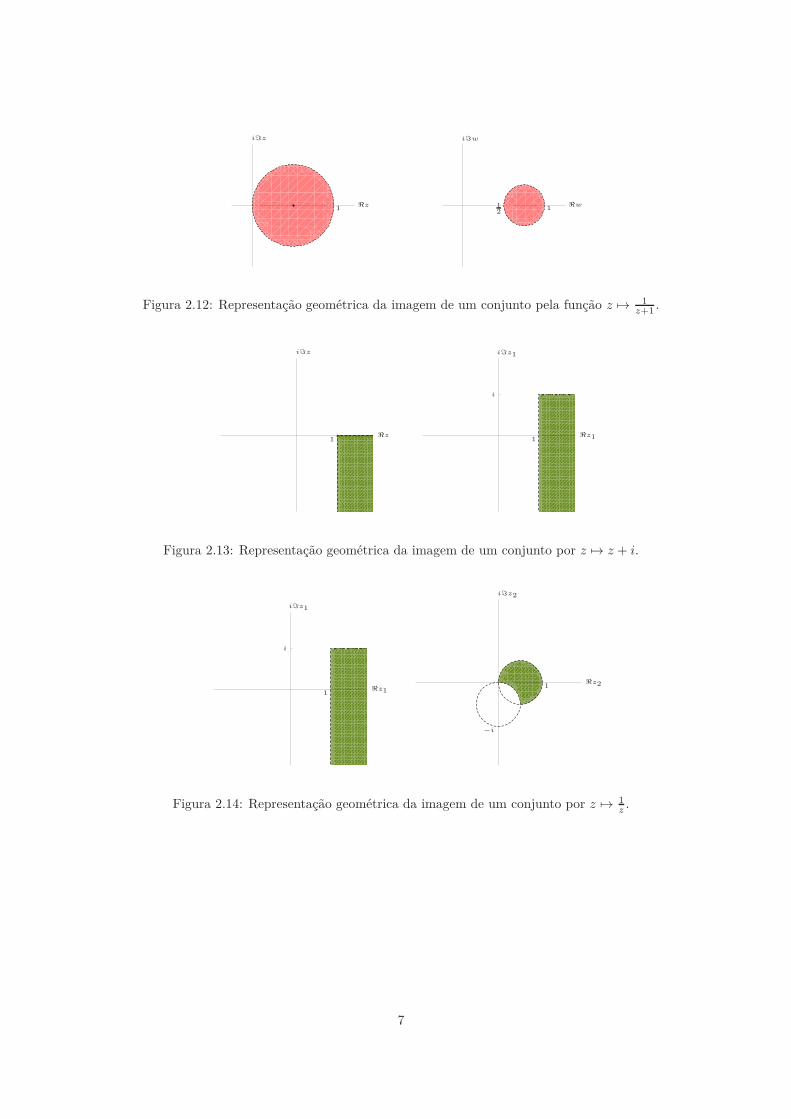
Figura 2.12: Representação geométrica da imagem de um conjunto pela função z 7→ 1z+1 .
1ℜz
iℑz
1
i
ℜz1
iℑz1
Figura 2.13: Representação geométrica da imagem de um conjunto por z 7→ z + i.
1
i
ℜz1
iℑz1
1
−i
ℜz2
iℑz2
Figura 2.14: Representação geométrica da imagem de um conjunto por z 7→ 1z.
7

a
b
z
Figura 2.15: Ângulo inscrito e ângulo ao centro.
w
a
b
z
Figura 2.16: A imagem dos eixos coordenados por w 7→ z = b + b−aw−1 .
8

Capítulo 3
Diferenciabilidade de funções
complexas
a a + 1
a + i
z
f′(a)
g(z)
f(a)
Figura 3.1: A aproximação linear g(z) = f(a) + f ′(a)(z − a) de uma função diferenciável noponto a.
a
zw
f(a)
Figura 3.2: Interpretação geométrica da equação de Cauchy-Riemann.
9
π2
π 3π2
2π
π2
i
πi
3π2
i
2πi
π 3π2
2π
π2
i
πi
2πi
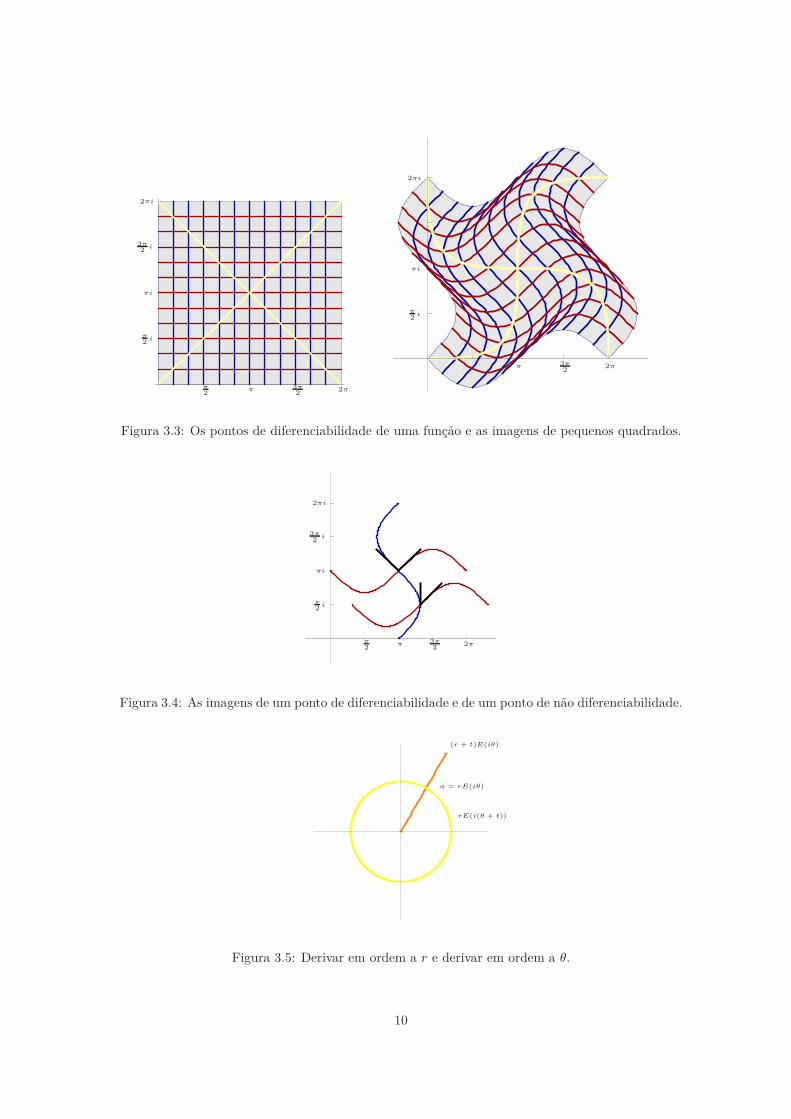
Figura 3.3: Os pontos de diferenciabilidade de uma função e as imagens de pequenos quadrados.
π2
π 3π2
2π
π2
i
πi
3π2
i
2πi
Figura 3.4: As imagens de um ponto de diferenciabilidade e de um ponto de não diferenciabilidade.
a = rE(iθ)
rE(i(θ + t))
(r + t)E(iθ)
Figura 3.5: Derivar em ordem a r e derivar em ordem a θ.
10
a
ℜz
iℑz
ℜz
iℑz
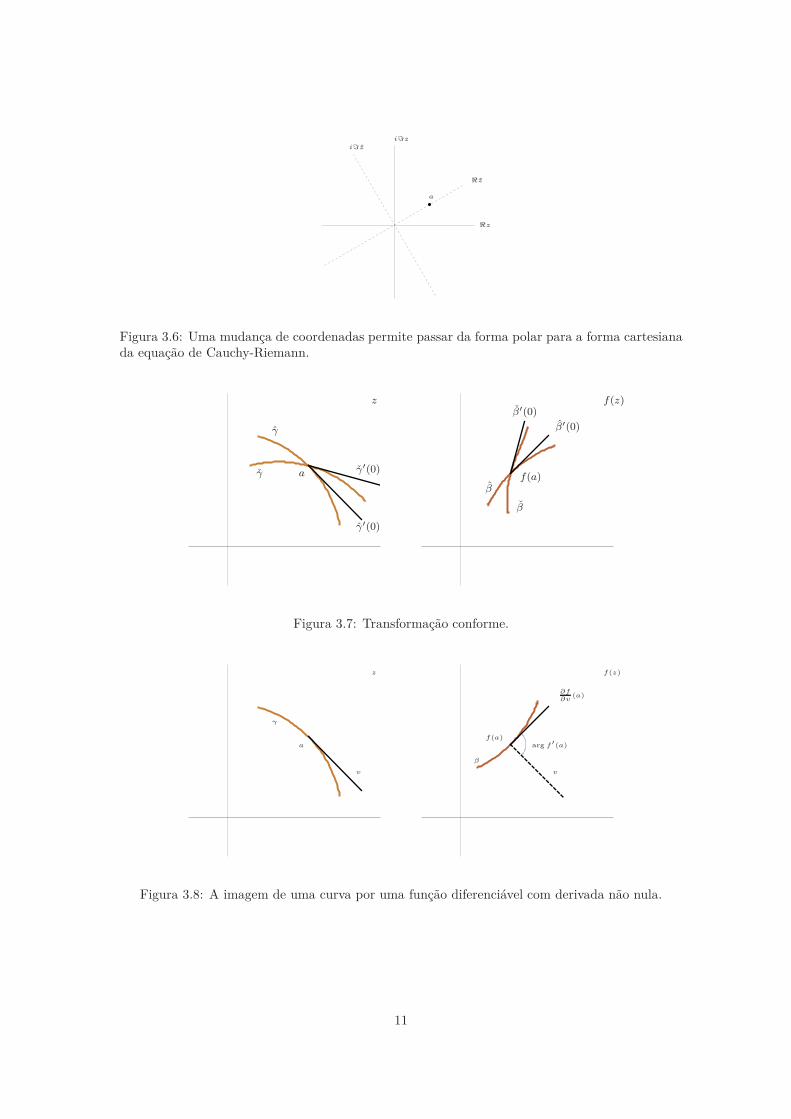
Figura 3.6: Uma mudança de coordenadas permite passar da forma polar para a forma cartesianada equação de Cauchy-Riemann.
aγ
γ′(0)
γ′(0)
z
γ
β
β′(0)
β′(0)
f(a)
f(z)
β
Figura 3.7: Transformação conforme.
a
γ
z
v
arg f′(a)
v
f(z)
f(a)
β
∂f∂v
(a)
Figura 3.8: A imagem de uma curva por uma função diferenciável com derivada não nula.
11

0 1
i 1 + i
f(a)
f(a) + fx(a)
f(a) + fy (a)
f(a) + fx(a) + fy (a)
Figura 3.9: Se f é R-diferenciável e conforme, então f é diferenciável.
f(a)
f(a) + fx(a)
f(a) + fy(a)
f(a) + fx(a) + fy(a)
Figura 3.10: Se f é R-diferenciável e Df transforma vetores de comprimento l em vetores decomprimento κl, então, ou f , ou f são diferenciáveis.
d1
π
π
x
f1(x)
d2
d2
π
π
x
f2(x)
π
π
x
f3(x)
π
π
x
f10(x)
Figura 3.11: Ilustração do Exemplo 3.36 de convergência uniforme.
12
x
f2(x)
1
2
3
4
5
1x
f3(x)
1
2
3
4
5
1x
f4(x)
1
2
3
4
5
1x
f5(x)
1
2
3
4
5
1
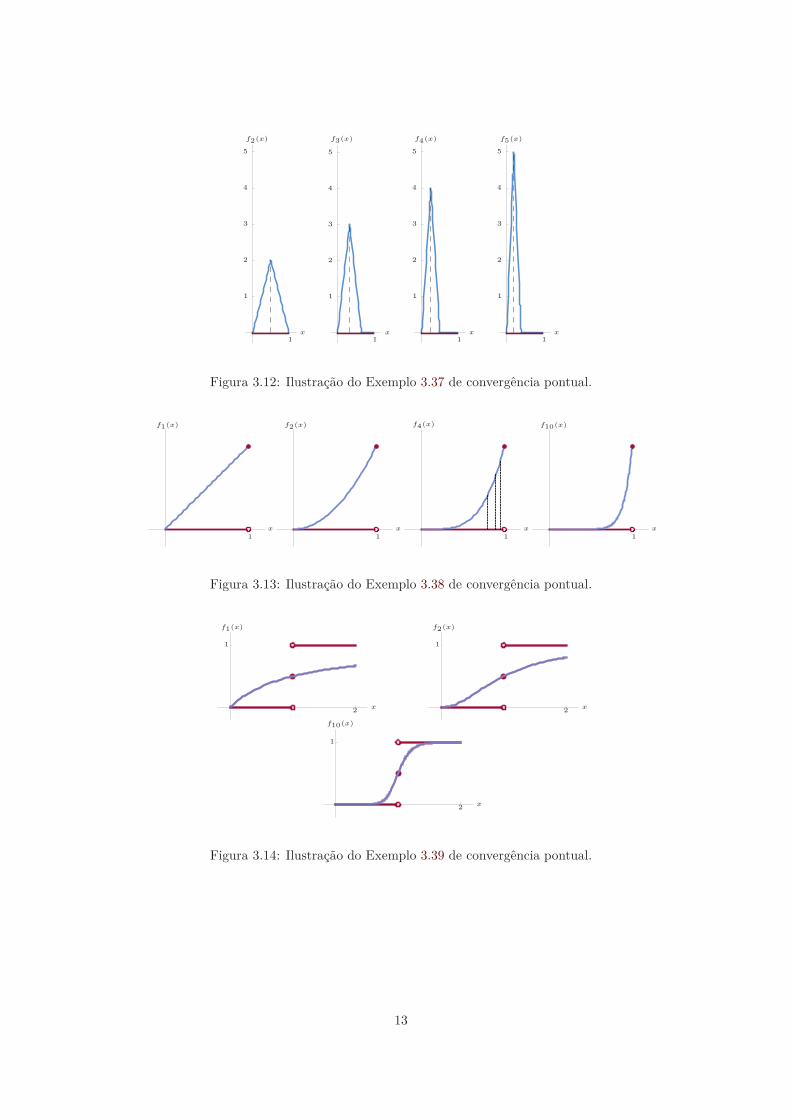
Figura 3.12: Ilustração do Exemplo 3.37 de convergência pontual.
x
1
f1(x)
x
1
f2(x)
x
1
f4(x)
x
1
f10(x)
Figura 3.13: Ilustração do Exemplo 3.38 de convergência pontual.
x
1
2
f1(x)
x
1
2
f2(x)
x
1
2
f10(x)
Figura 3.14: Ilustração do Exemplo 3.39 de convergência pontual.
13
x
f1(x)
x
f2(x)
x
f3(x)
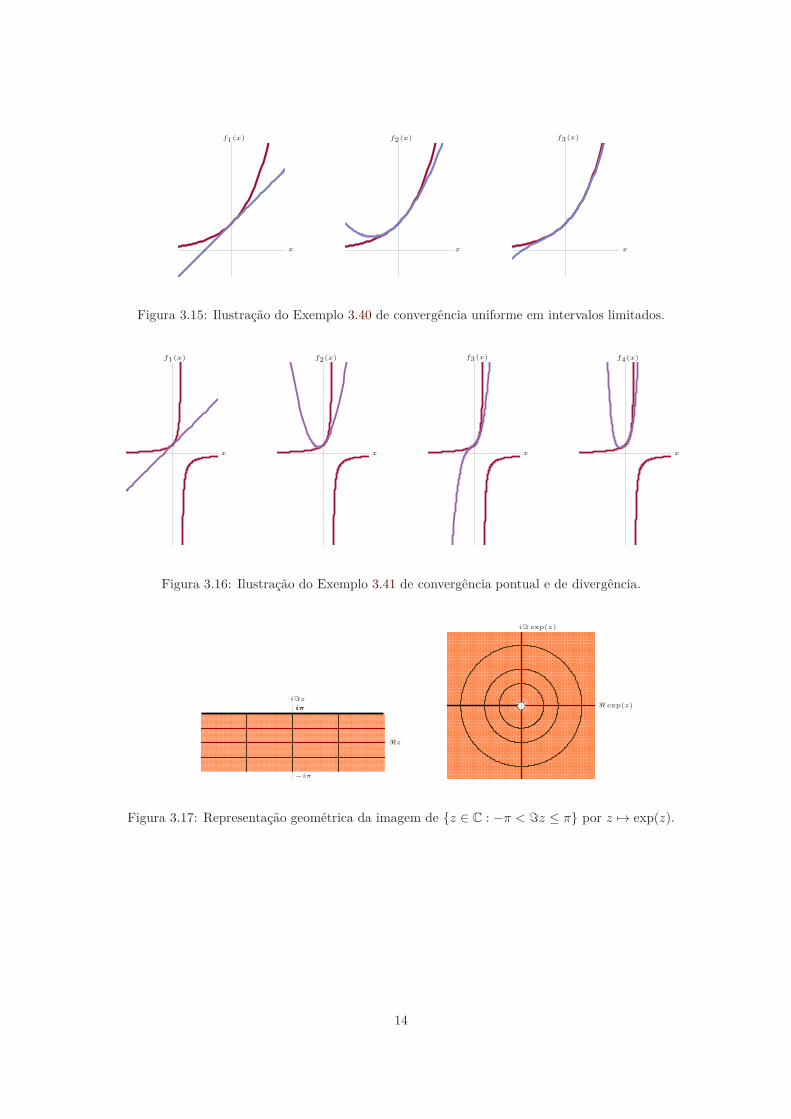
Figura 3.15: Ilustração do Exemplo 3.40 de convergência uniforme em intervalos limitados.
x
f1(x)
x
f2(x)
x
f3(x)
x
f4(x)
Figura 3.16: Ilustração do Exemplo 3.41 de convergência pontual e de divergência.
iπiπ
−iπ
ℜz
iℑzℜ exp(z)
iℑ exp(z)
Figura 3.17: Representação geométrica da imagem de z ∈ C : −π < ℑz ≤ π por z 7→ exp(z).
14

x
y
1
sinh x
cosh x
ex
2
Figura 3.18: Os gráficos de x 7→ cosh x e x 7→ sinh x.
1 eℜz
iℑz
1
iπ
−iπ
ℜ log z
iℑ log z
Figura 3.19: Representação geométrica da imagem de um conjunto pela função logaritmo principal.
ℜz
iℑz
ℜf(z)
iℑf(z)
iπ
−iπ
Figura 3.20: Representação geométrica da imagem de duas semirretas pela função descontínua naorigem.
15

ℜf(z)
iℑf(z)
iπ
−iπ
Figura 3.21: As imagens de pontos de diferenciabilidade e de pontos de não diferenciabilidade e aforma polar da equação de Cauchy-Riemann.
ℜz
iℑz
ℜf(z)
iℑf(z)
iπ
−iπ
Figura 3.22: Os pontos de diferenciabilidade de uma função e as pré-imagens de pequenos qua-drados.
i
12
− 12
i
1
−i
Figura 3.23: Representação geométrica da imagem do conjunto S pela função do Exercício 3.63.
16
Capítulo 4
Integrais de funções complexas
z
B
C
A
aa + R
−0
Cǫ
ǫ
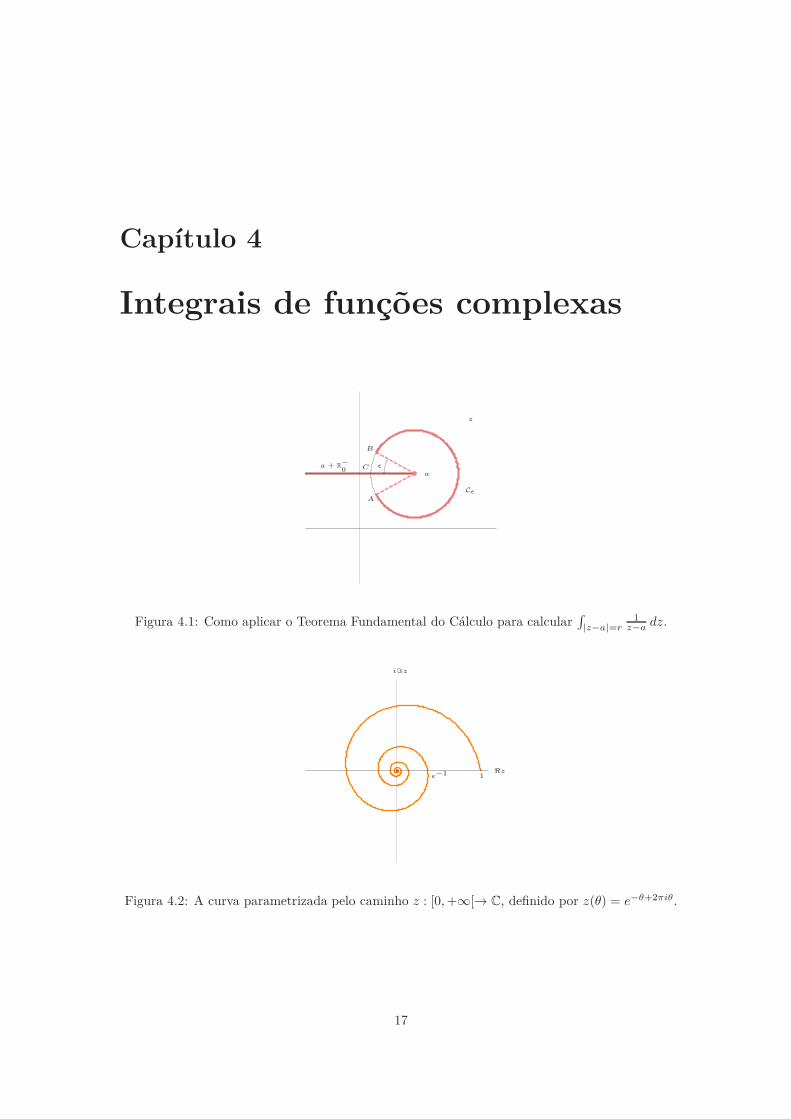
Figura 4.1: Como aplicar o Teorema Fundamental do Cálculo para calcular∫
|z−a|=r1
z−adz.
1e−1 ℜz
iℑz
Figura 4.2: A curva parametrizada pelo caminho z : [0, +∞[→ C, definido por z(θ) = e−θ+2πiθ.
17

(a1, b1) (a2, b1)
(a2, b2)(a1, b2)
(x, b1)
(a2, y)
(x, b2)
(a1, y)
Figura 4.3: A fronteira do retângulo R descrita no sentido direto.
L1,1
L1,2
L2,2
L2,1
x0 + iy0
x + iy
x + iy0
x0 + iy
Figura 4.4: O integral de f sobre L1 = L1,1 ∪ L1,2 é igual ao integral de f sobre L2 = L2,1 ∪ L2,2,de acordo com o Teorema de Goursat.
1ℜz
iℑz
Figura 4.5: Um conjunto simplesmente conexo.
18

1
Ω1
Ω2
ℜz
iℑz
Figura 4.6: Divisão do conjunto da Figura 4.5 em dois.
Ω
Figura 4.7: O conjunto Ω simplesmente conexo do Teorema de Cauchy melhorado.
ξr
r0
C1C1C1
C2C2C2
Figura 4.8: Uma forma de provar a independência do integral∫
|z−ξ|=rf(z) dz em relação ao valor
de r.
19

C
a
C1
C2
D
E
C3
C4
Figura 4.9: Duas formas de calcular o índice da curva C em relação ao ponto a.
i
−i
C1
C2
Rℜz
iℑz
Figura 4.10: Decomposição de uma curva em duas outras para aplicação da Fórmula Integral deCauchy.
R1
R2
Figura 4.11: Divisão do retângulo R nos retângulos R1 e R2.
20
R1,ǫ
R2,ǫ
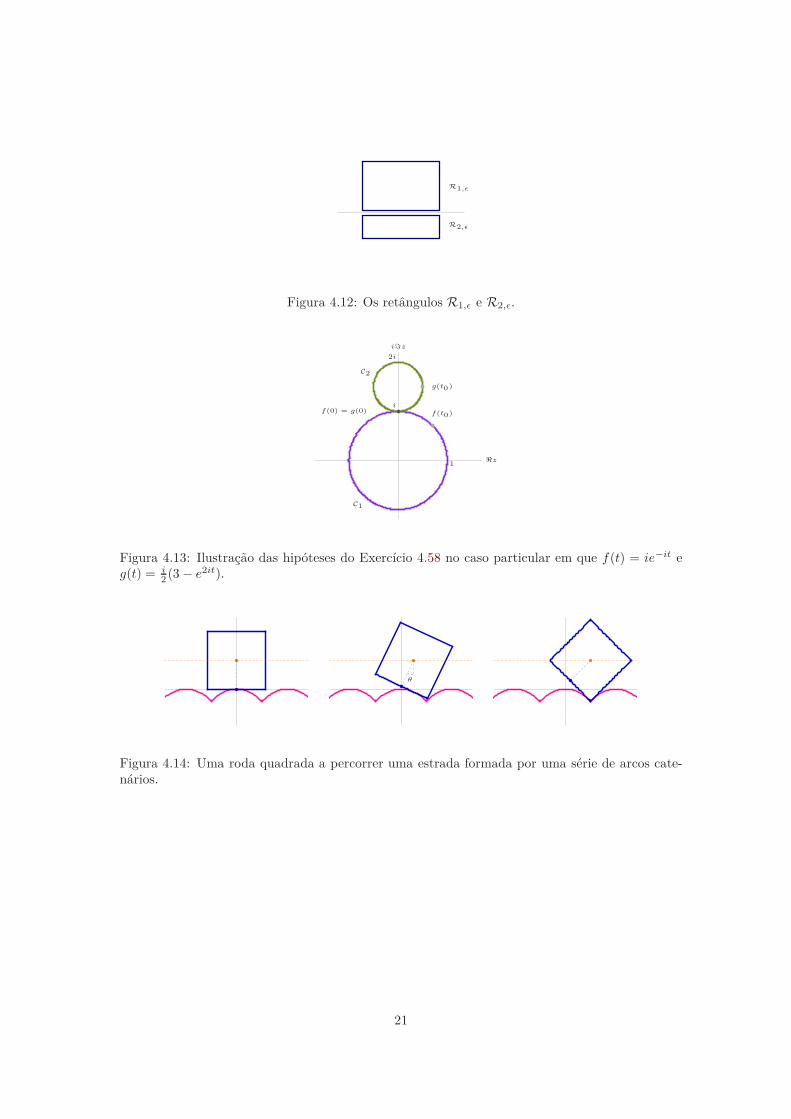
Figura 4.12: Os retângulos R1,ǫ e R2,ǫ.
1
2i
i
ℜz
iℑz
C1
C2
f(0) = g(0) f(t0)
g(t0)
Figura 4.13: Ilustração das hipóteses do Exercício 4.58 no caso particular em que f(t) = ie−it eg(t) = i
2 (3 − e2it).
θ
Figura 4.14: Uma roda quadrada a percorrer uma estrada formada por uma série de arcos cate-nários.
21
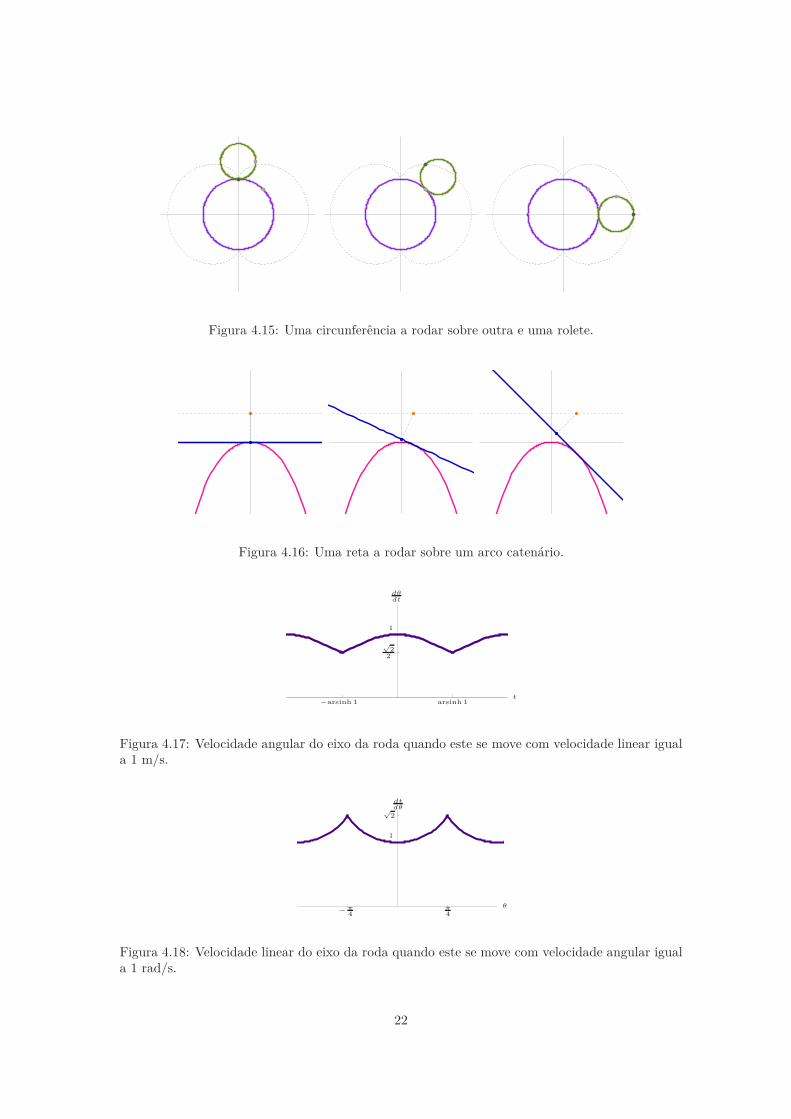
Figura 4.15: Uma circunferência a rodar sobre outra e uma rolete.
Figura 4.16: Uma reta a rodar sobre um arco catenário.
1
t
dθdt
−arsinh 1 arsinh 1
√2
2
Figura 4.17: Velocidade angular do eixo da roda quando este se move com velocidade linear iguala 1 m/s.
1
θ
dtdθ
− π4
√2
π4
Figura 4.18: Velocidade linear do eixo da roda quando este se move com velocidade angular iguala 1 rad/s.
22
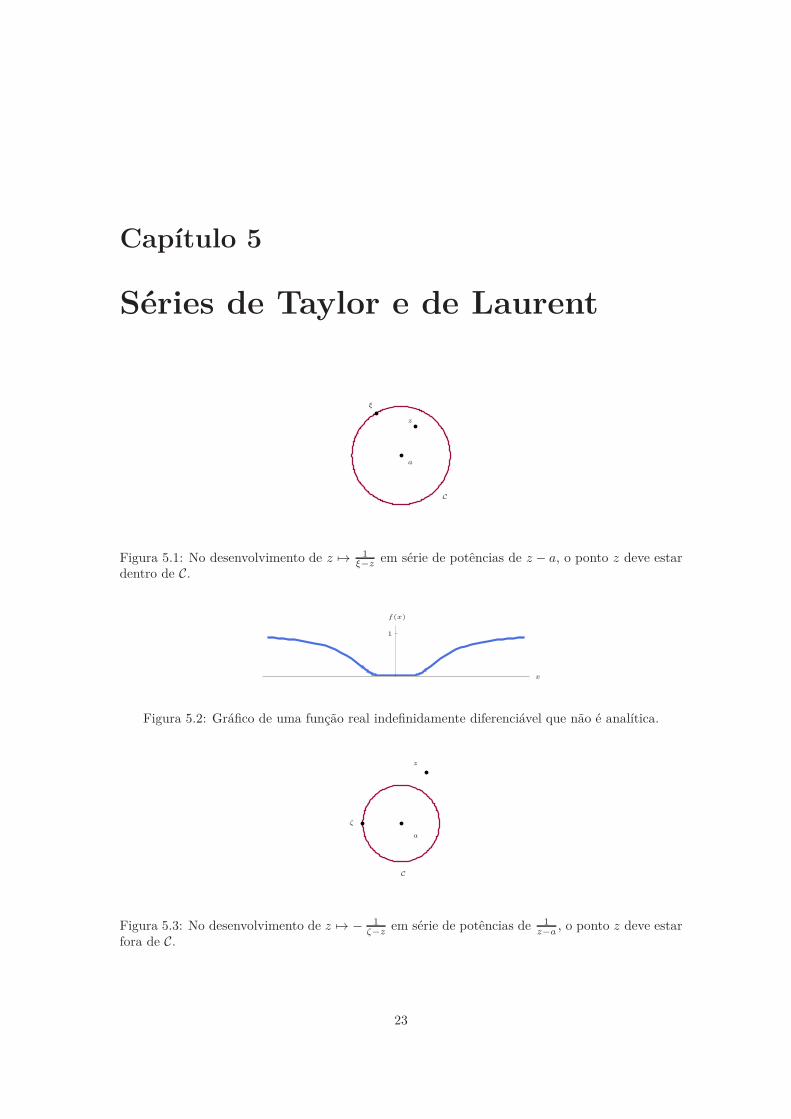
Capítulo 5
Séries de Taylor e de Laurent
a
z
ξ
C
Figura 5.1: No desenvolvimento de z 7→ 1ξ−z
em série de potências de z − a, o ponto z deve estardentro de C.
x
1
f(x)
Figura 5.2: Gráfico de uma função real indefinidamente diferenciável que não é analítica.
a
z
ζ
C
Figura 5.3: No desenvolvimento de z 7→ − 1ζ−z
em série de potências de 1z−a
, o ponto z deve estarfora de C.
23

a
z
C1
C2
Figura 5.4: Curvas auxiliares usadas na prova do desenvolvimento em série de Laurent.
Figura 5.5: A curva de integração não está contida na região anular em que é válido o desenvol-vimento em série de Laurent.
C
C1
C2
CL
Figura 5.6: Para provar o Teorema dos Resíduos, usa-se o facto de∫
Cf(z) dz =
∑L
j=1
∫
Cjf(z) dz.
24
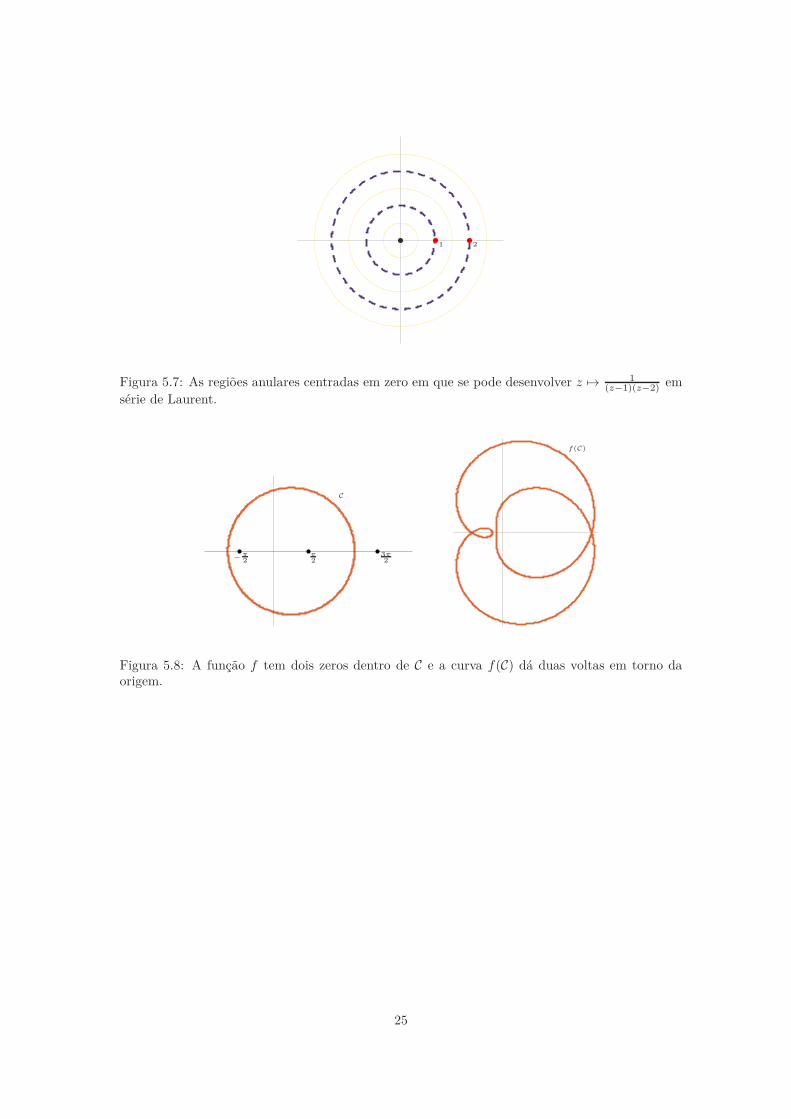
1 2
Figura 5.7: As regiões anulares centradas em zero em que se pode desenvolver z 7→ 1(z−1)(z−2) em
série de Laurent.
π2
− π2
3π2
C
f(C)
Figura 5.8: A função f tem dois zeros dentro de C e a curva f(C) dá duas voltas em torno daorigem.
25
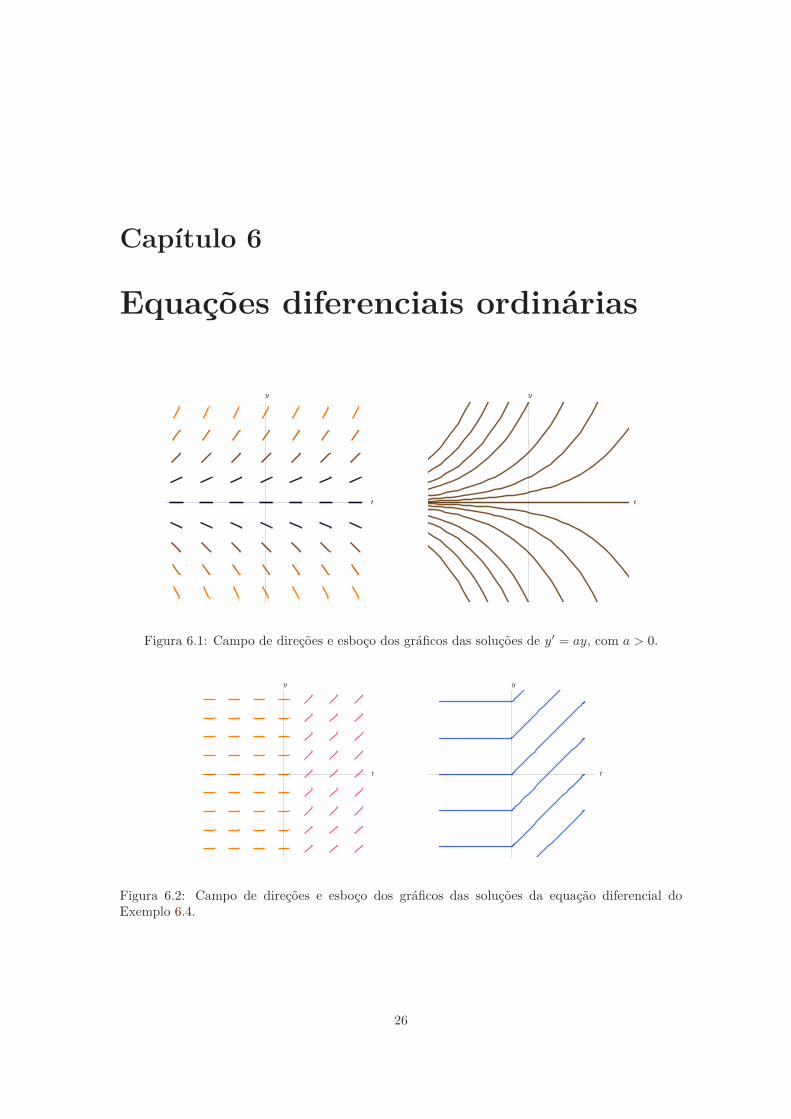
Capítulo 6
Equações diferenciais ordinárias
t
y
t
y
Figura 6.1: Campo de direções e esboço dos gráficos das soluções de y′ = ay, com a > 0.
t
y
t
y
Figura 6.2: Campo de direções e esboço dos gráficos das soluções da equação diferencial doExemplo 6.4.
26
t
y
y(t)
(t0, y0)
U
V
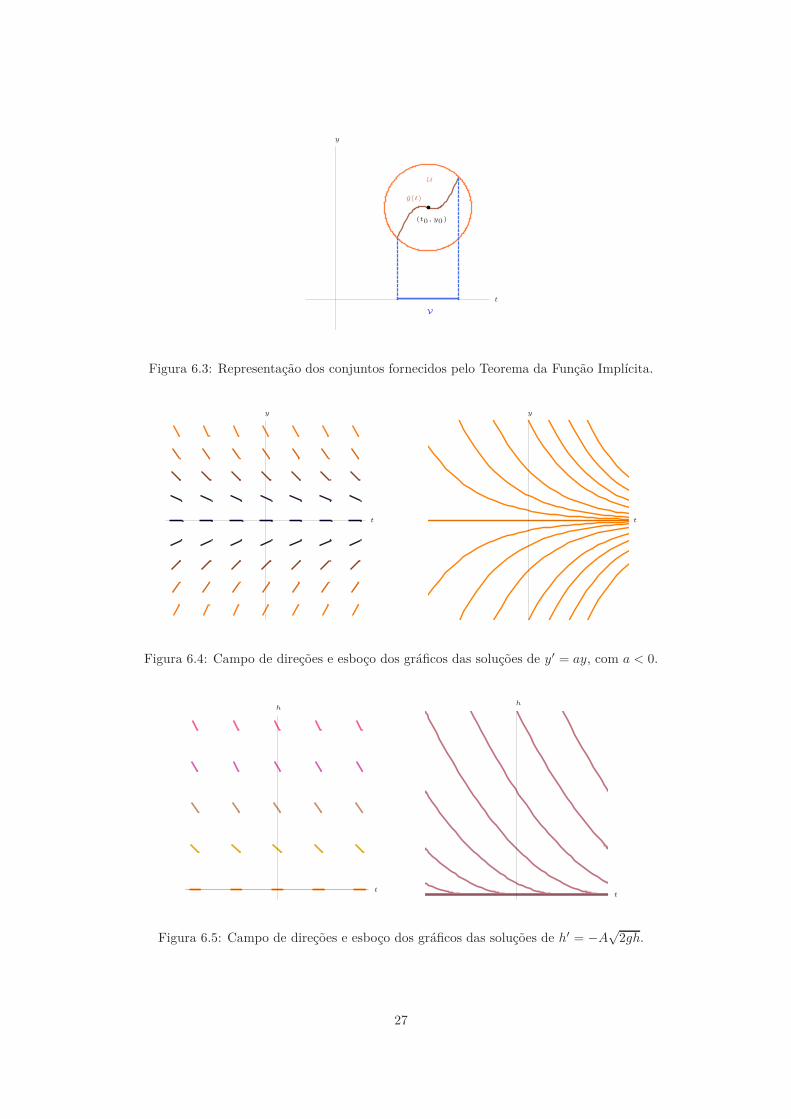
Figura 6.3: Representação dos conjuntos fornecidos pelo Teorema da Função Implícita.
t
y
t
y
Figura 6.4: Campo de direções e esboço dos gráficos das soluções de y′ = ay, com a < 0.
t
h
t
h
Figura 6.5: Campo de direções e esboço dos gráficos das soluções de h′ = −A√
2gh.
27

t
y
π
π2
3π2
−π
− π2
− 3π2
t
y
(t0, y0)
π2
3π2
− π2
− 3π2
Figura 6.6: Campo de direções e esboço dos gráficos das soluções de y′ = tan y.
s
Q
100 500s
Q
Figura 6.7: Campo de direções e esboço dos gráficos das soluções de dQ
ds= 1 − Q
s.
t
y
p
Figura 6.8: Campo de direções e esboço dos gráficos das soluções de dy
dt= y
y−t.
28
ab
t
y
a2b
t
y
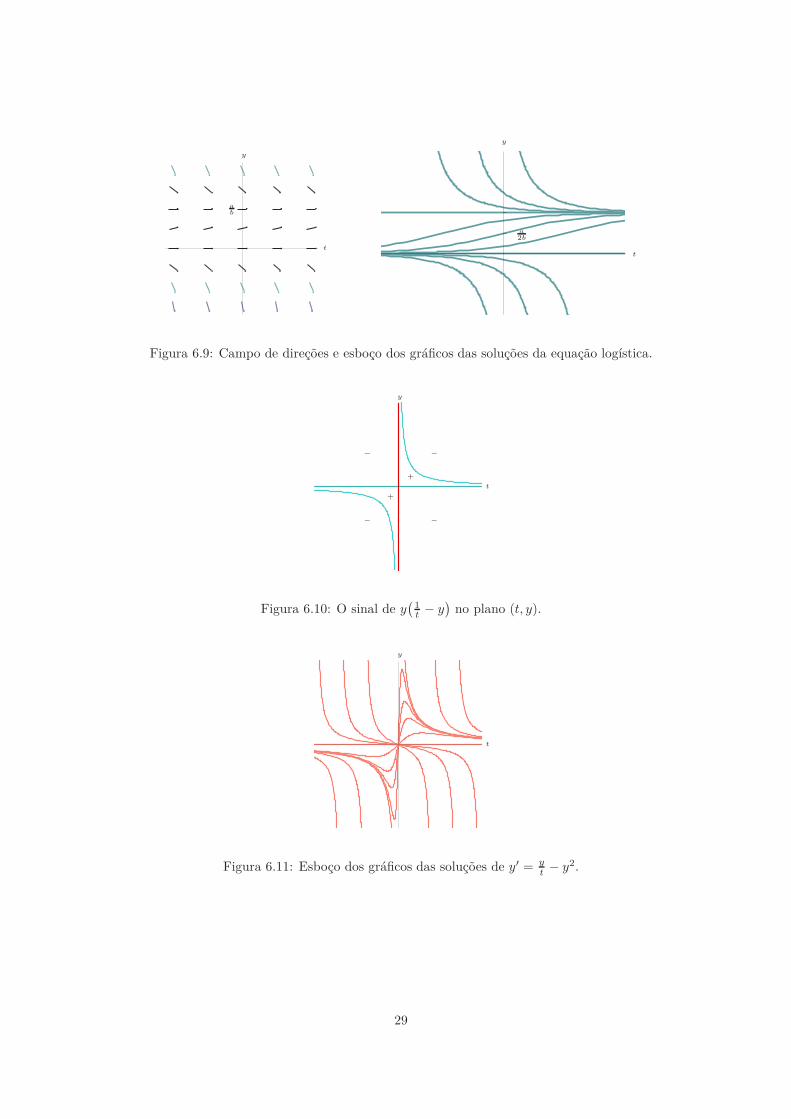
Figura 6.9: Campo de direções e esboço dos gráficos das soluções da equação logística.
+
+
−
−
−
−
t
y
Figura 6.10: O sinal de y(
1t
− y)
no plano (t, y).
t
y
Figura 6.11: Esboço dos gráficos das soluções de y′ = y
t− y2.
29
1 2−1−2
1
2
−1
−2
t
y
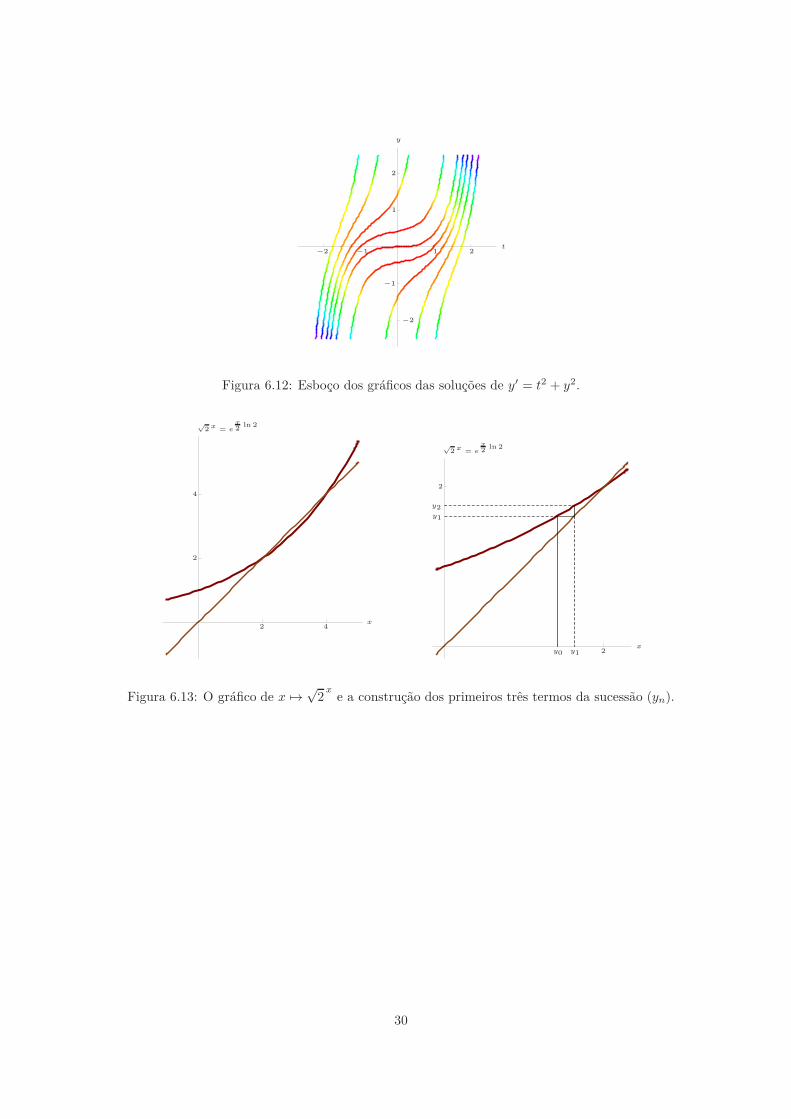
Figura 6.12: Esboço dos gráficos das soluções de y′ = t2 + y2.
x
2
2
4
4
√2 x = e
x2
ln 2
x
2
2
√2 x = e
x2
ln 2
y0
y1
y2
y1
Figura 6.13: O gráfico de x 7→√
2x
e a construção dos primeiros três termos da sucessão (yn).
30
1
21
−1
−1
5
−5
−2t
y1,y2,y3,y
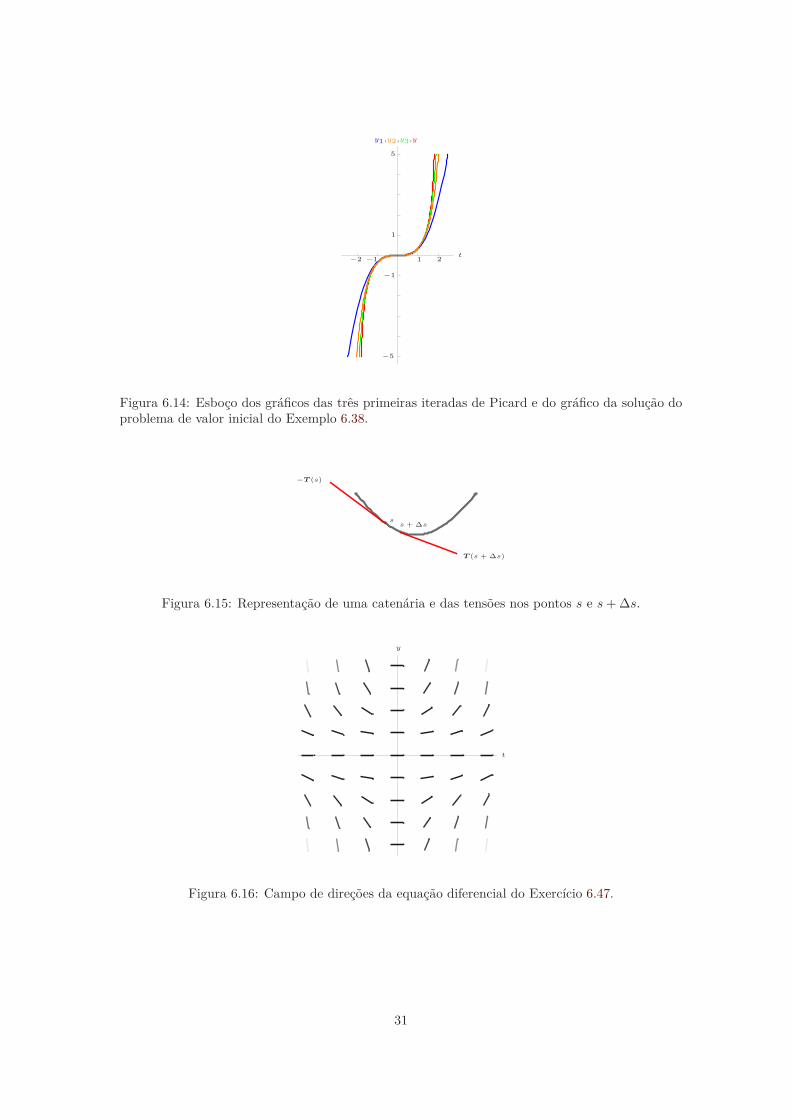
Figura 6.14: Esboço dos gráficos das três primeiras iteradas de Picard e do gráfico da solução doproblema de valor inicial do Exemplo 6.38.
−T (s)
T (s + ∆s)
ss + ∆s
Figura 6.15: Representação de uma catenária e das tensões nos pontos s e s + ∆s.
t
y
Figura 6.16: Campo de direções da equação diferencial do Exercício 6.47.
31
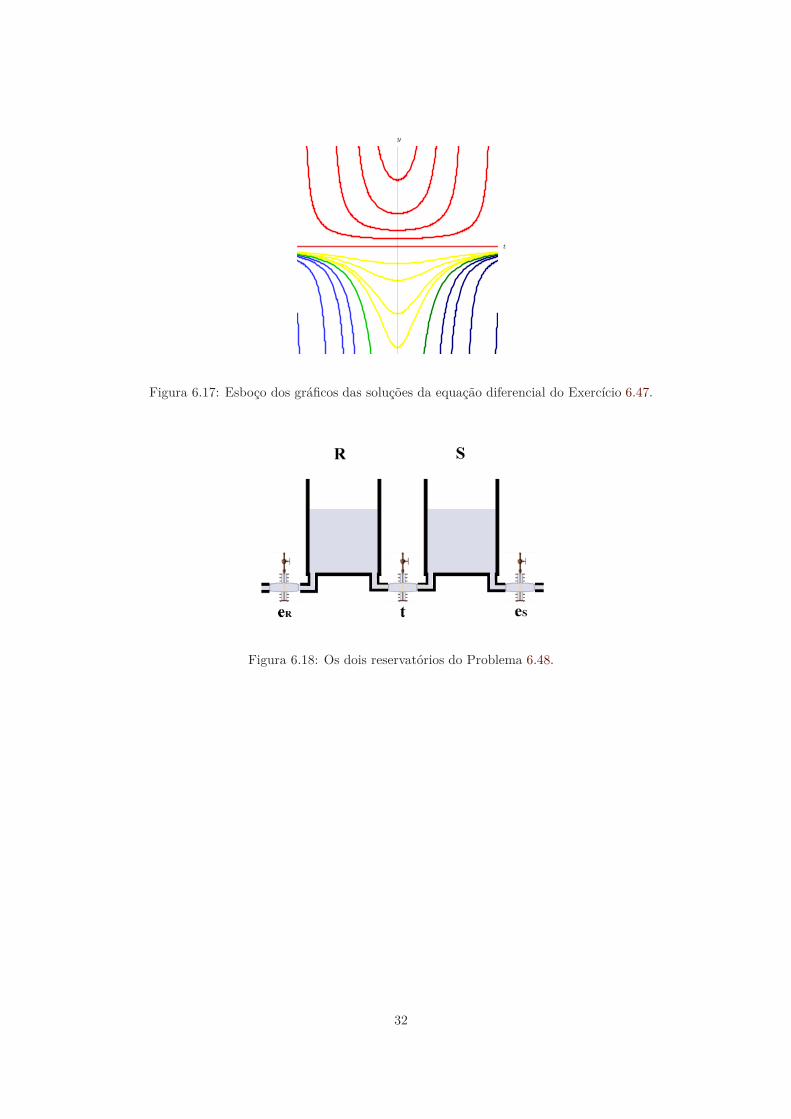
t
y
Figura 6.17: Esboço dos gráficos das soluções da equação diferencial do Exercício 6.47.
Figura 6.18: Os dois reservatórios do Problema 6.48.
32
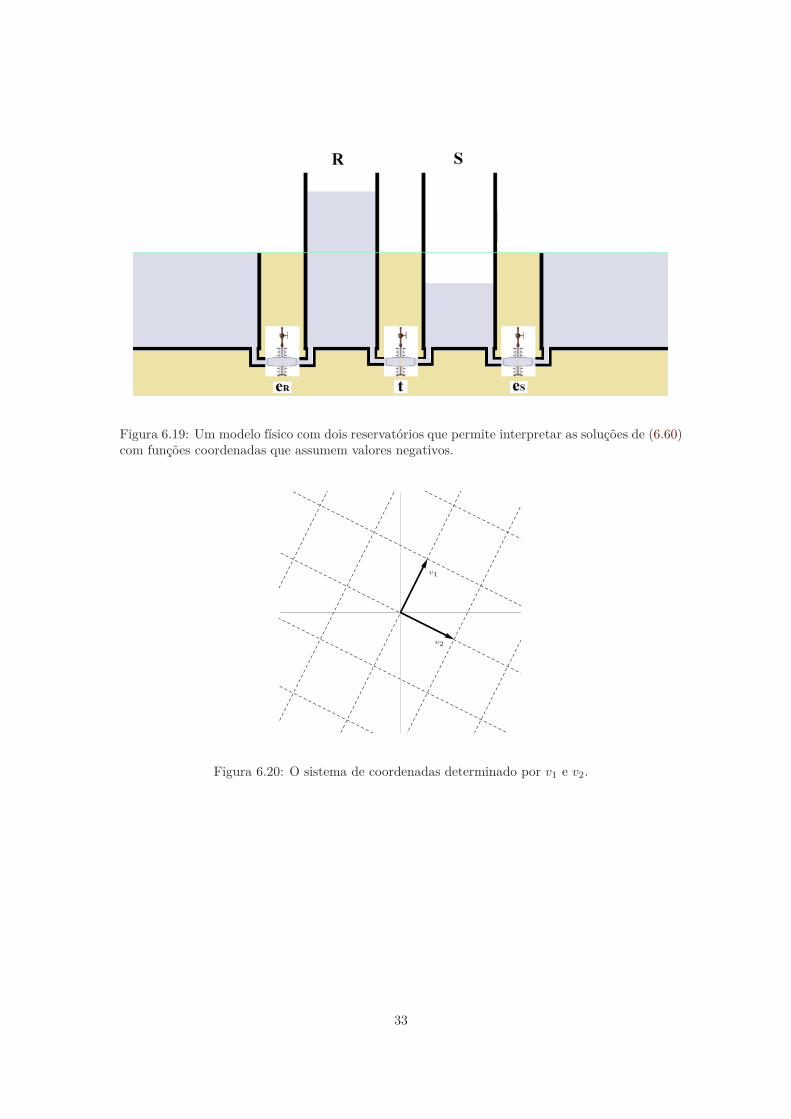
Figura 6.19: Um modelo físico com dois reservatórios que permite interpretar as soluções de (6.60)com funções coordenadas que assumem valores negativos.
v1
v2
Figura 6.20: O sistema de coordenadas determinado por v1 e v2.
33
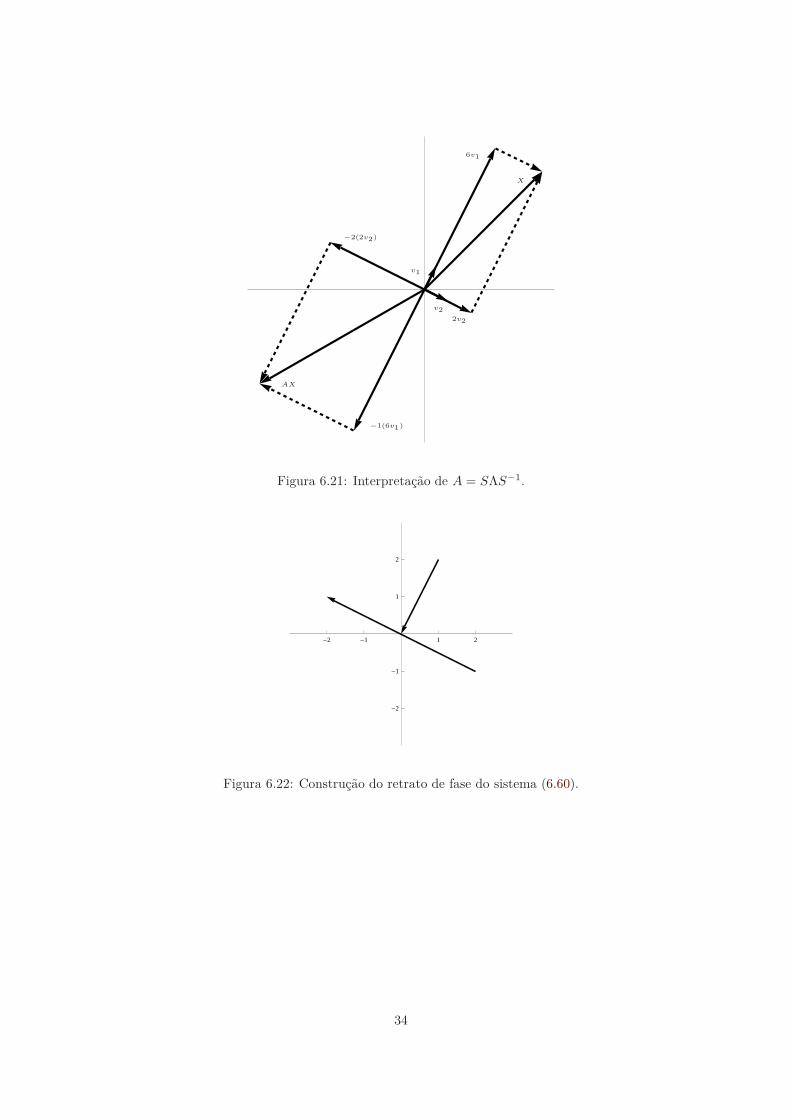
v1
v2
6v1
2v2
−1(6v1)
−2(2v2)
X
AX
Figura 6.21: Interpretação de A = SΛS−1.
-2 -1 1 2
-2
-1
1
2
Figura 6.22: Construção do retrato de fase do sistema (6.60).
34

-2 -1 1 2
-2
-1
1
2
Figura 6.23: Construção do retrato de fase do sistema (6.60).
-2 -1 1 2
-2
-1
1
2
Figura 6.24: Construção do retrato de fase do sistema (6.60).
35

- 2 -1 1 2
- 2
-1
1
2
X0
Figura 6.25: Construção do retrato de fase do sistema (6.60).
-2 -1 1 2
-2
-1
1
2
Figura 6.26: Construção do retrato de fase do sistema (6.60).
36
-2 -1 1 2
-2
-1
1
2
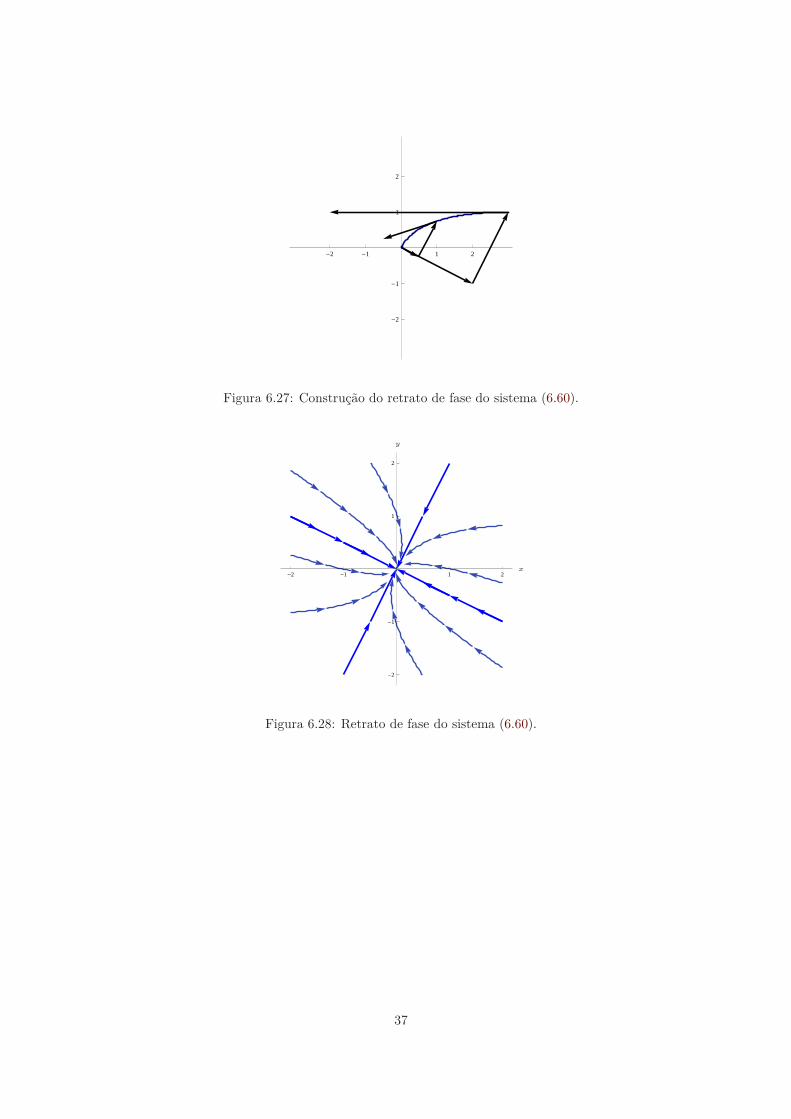
Figura 6.27: Construção do retrato de fase do sistema (6.60).
-2 -1 1 2
-2
-1
1
2
x
y
Figura 6.28: Retrato de fase do sistema (6.60).
37
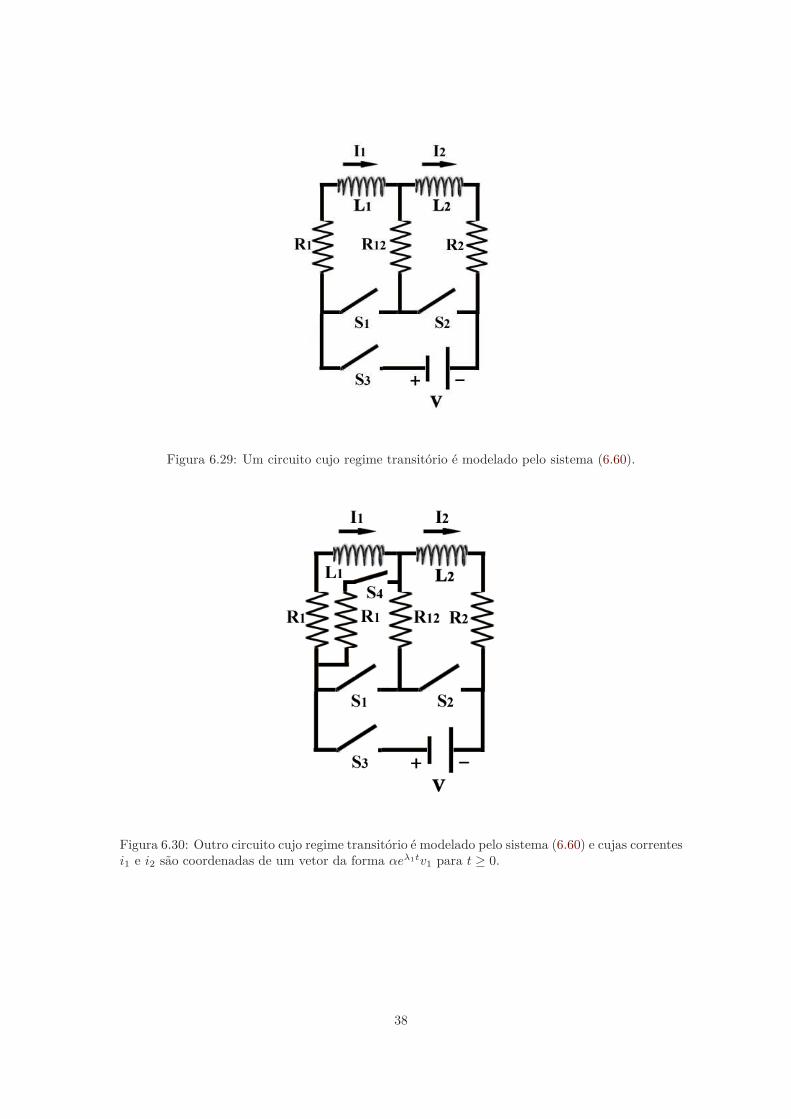
Figura 6.29: Um circuito cujo regime transitório é modelado pelo sistema (6.60).
Figura 6.30: Outro circuito cujo regime transitório é modelado pelo sistema (6.60) e cujas correntesi1 e i2 são coordenadas de um vetor da forma αeλ1tv1 para t ≥ 0.
38
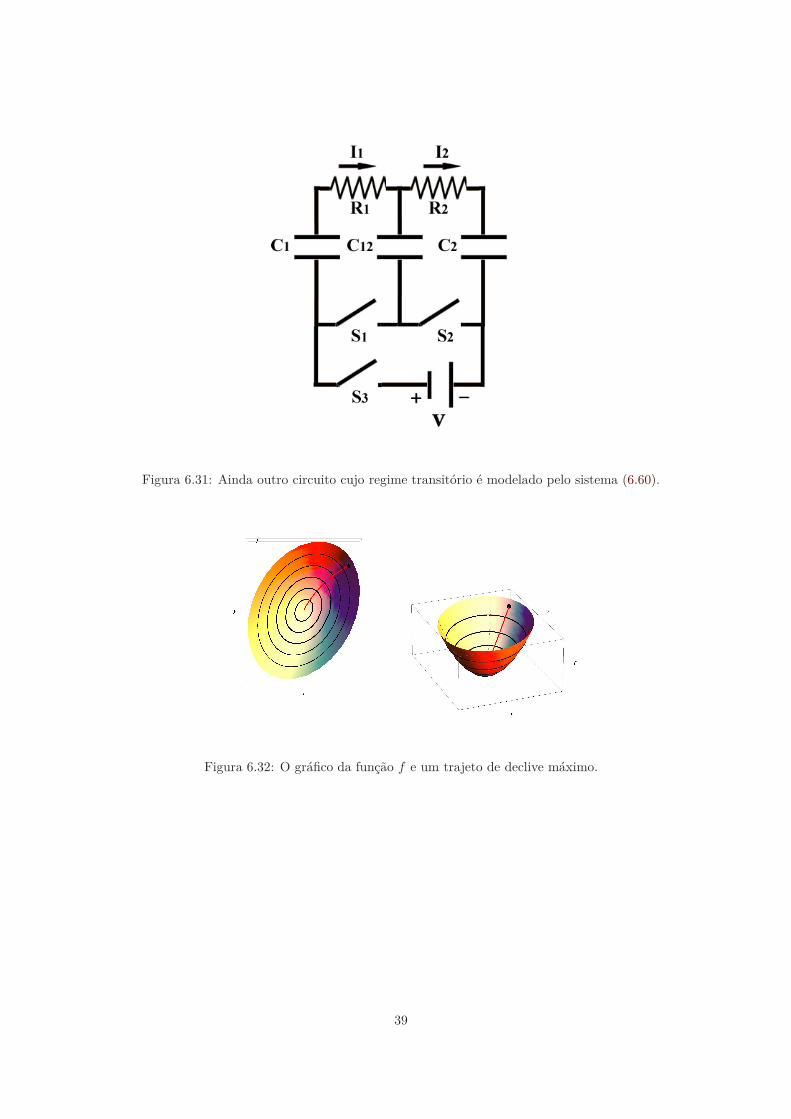
Figura 6.31: Ainda outro circuito cujo regime transitório é modelado pelo sistema (6.60).
Figura 6.32: O gráfico da função f e um trajeto de declive máximo.
39

x
y
er
eθ
mg
mg sin θ
θ
θ
Figura 6.33: O pêndulo simples.
θ
θ′
R
ωR
Figura 6.34: Retrato de fase do sistema (6.87).
40
θ
γ
π−π
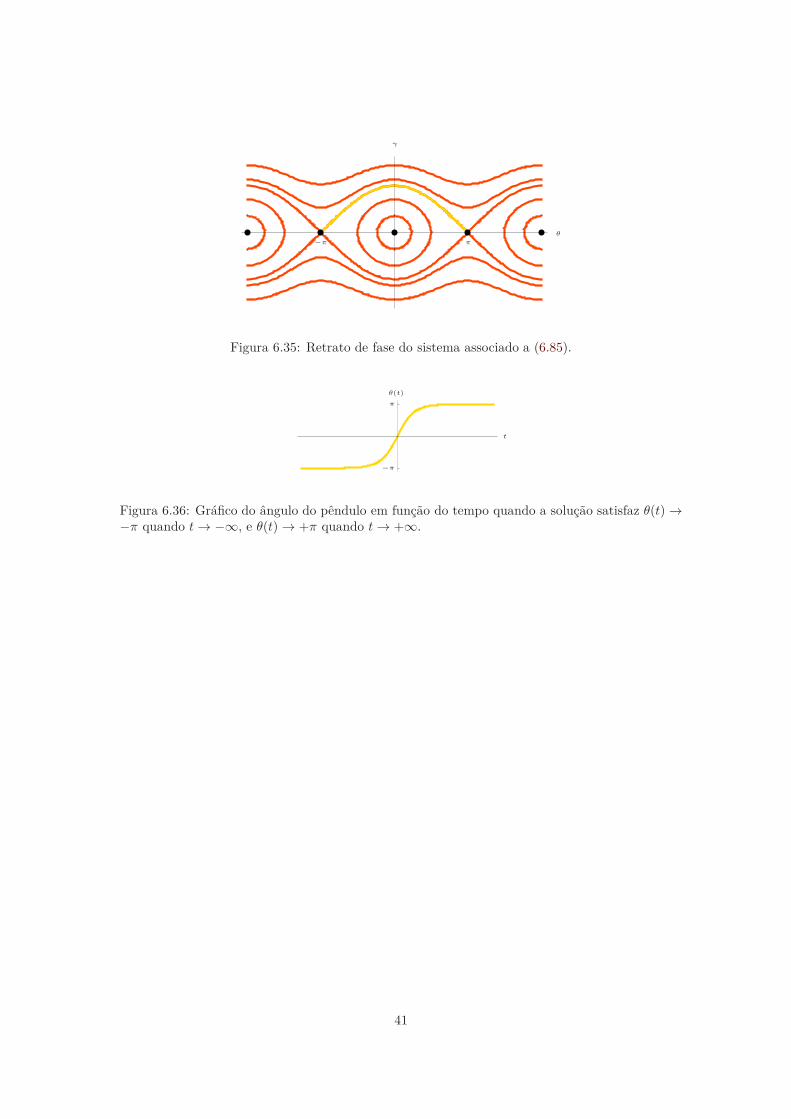
Figura 6.35: Retrato de fase do sistema associado a (6.85).
θ(t)
t
π
−π
Figura 6.36: Gráfico do ângulo do pêndulo em função do tempo quando a solução satisfaz θ(t) →−π quando t → −∞, e θ(t) → +π quando t → +∞.
41
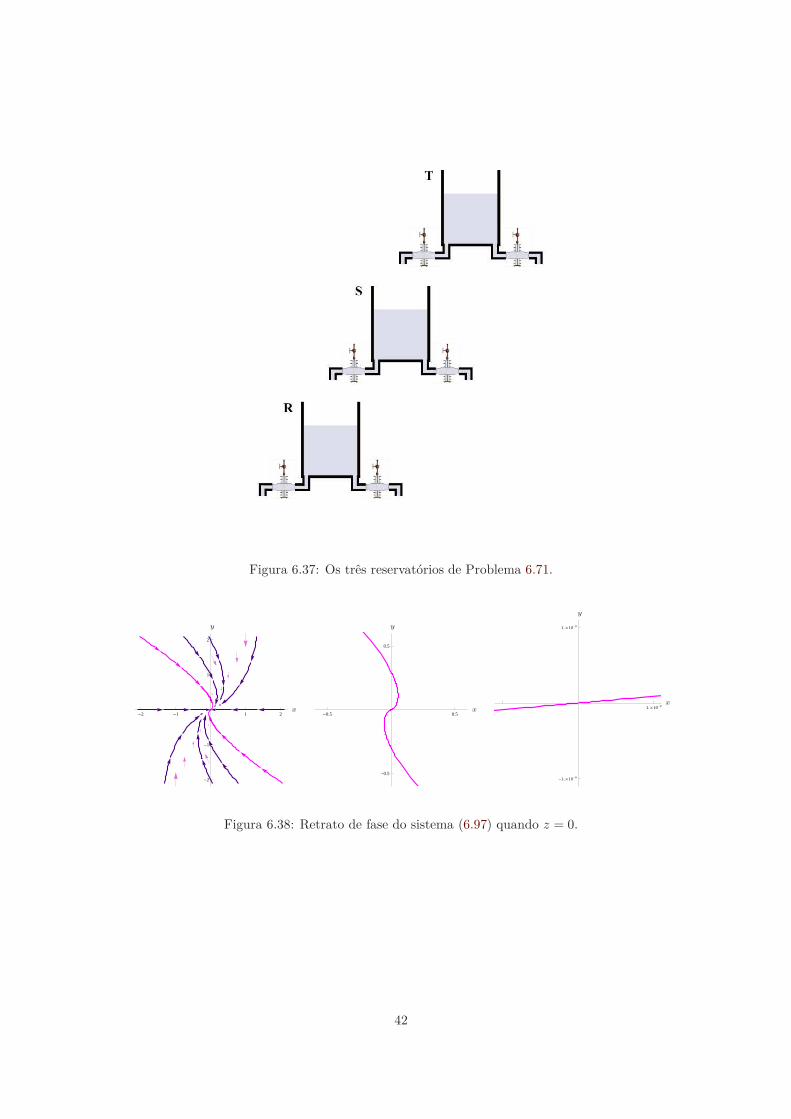
Figura 6.37: Os três reservatórios de Problema 6.71.
-2 -1 1 2
-2
-1
1
2
x
y
-0.5 0.5
-0.5
0.5
x
y
1.´10-9
-1.´10-9
1.´10-9
x
y
Figura 6.38: Retrato de fase do sistema (6.97) quando z = 0.
42
x
0
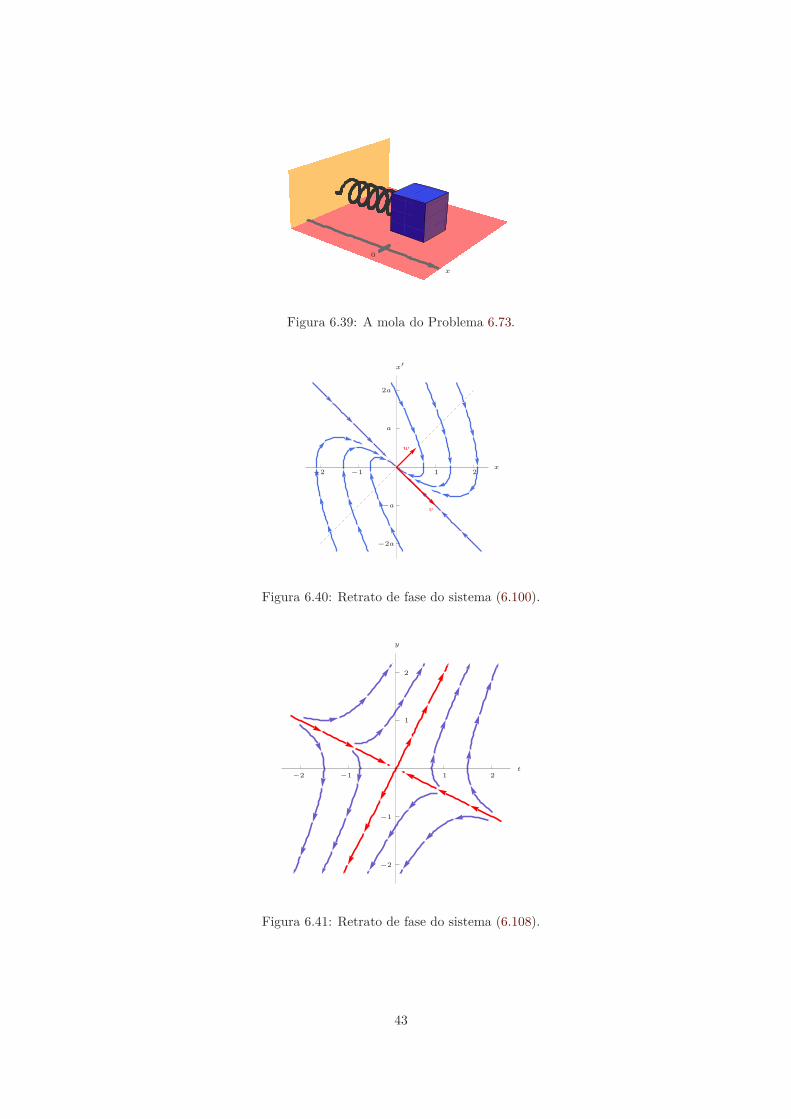
Figura 6.39: A mola do Problema 6.73.
x
x′
−2 −1 1 2
−2a
−a
a
2a
v
w
Figura 6.40: Retrato de fase do sistema (6.100).
−2 −1 1 2
−2
−1
1
2
t
y
Figura 6.41: Retrato de fase do sistema (6.108).
43

x
y
Figura 6.42: Retrato de fase do sistema (6.109).
x
x′
−2 −1 1 2
−2
−1
1
2
Figura 6.43: Retrato de fase do sistema (6.111).
x
x′
−2 −1 1 2
−2
−1
1
2
Figura 6.44: Retrato de fase do sistema associado a (6.114).
44
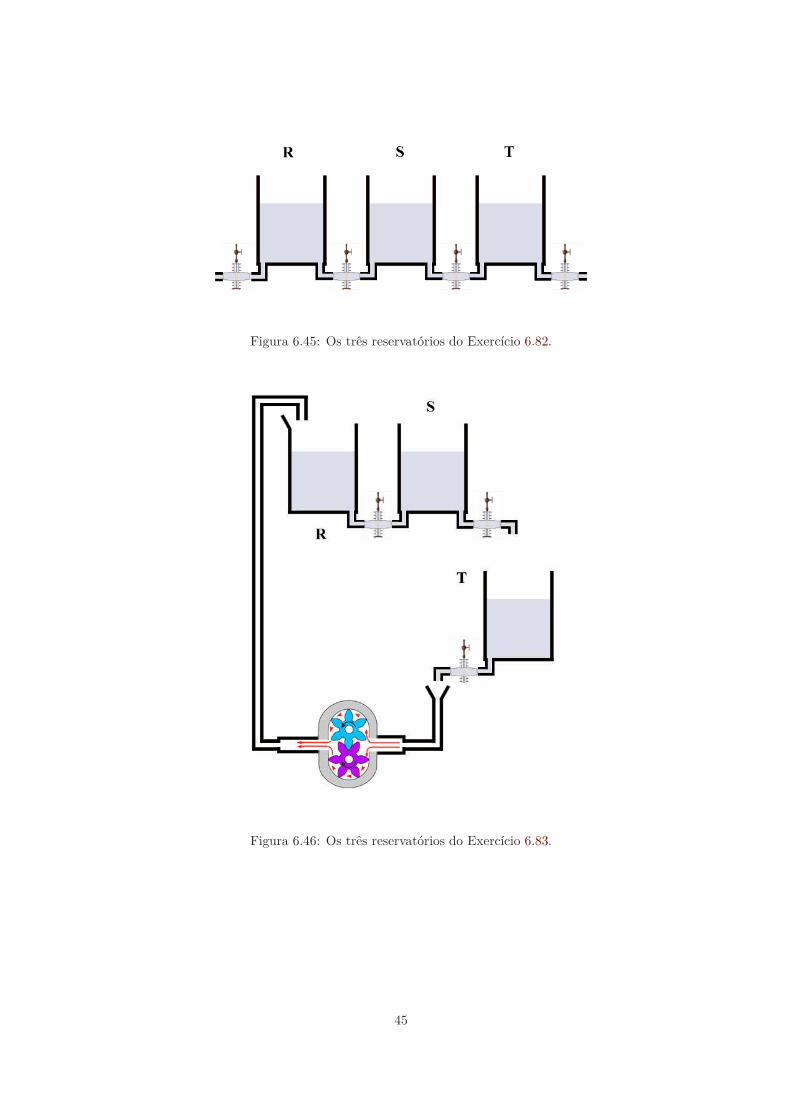
Figura 6.45: Os três reservatórios do Exercício 6.82.
Figura 6.46: Os três reservatórios do Exercício 6.83.
45
ℜλ
iℑλ
pp q
r
rs
s
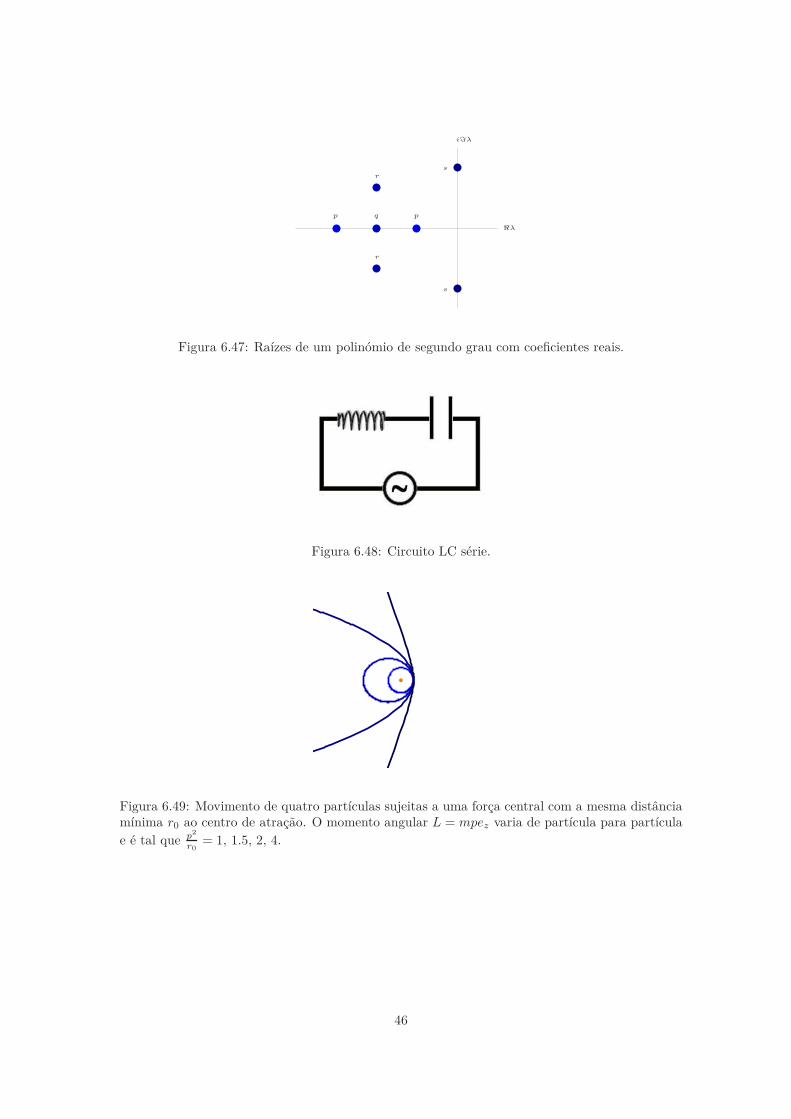
Figura 6.47: Raízes de um polinómio de segundo grau com coeficientes reais.
Figura 6.48: Circuito LC série.
Figura 6.49: Movimento de quatro partículas sujeitas a uma força central com a mesma distânciamínima r0 ao centro de atração. O momento angular L = mpez varia de partícula para partículae é tal que p2
r0= 1, 1.5, 2, 4.
46
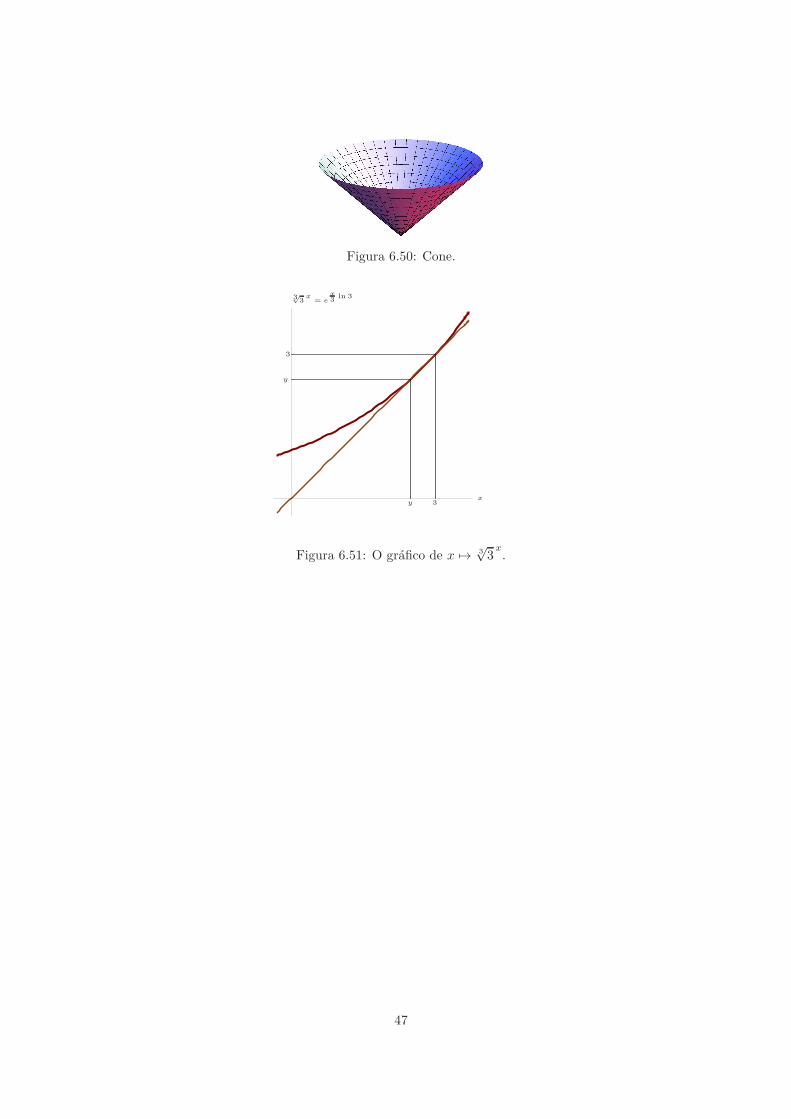
Figura 6.50: Cone.
x
3
3y
y
3√3
x= e
x3
ln 3
Figura 6.51: O gráfico de x 7→ 3√
3x.
47
Capítulo 7
Séries de Fourier e equações
diferenciais parciais
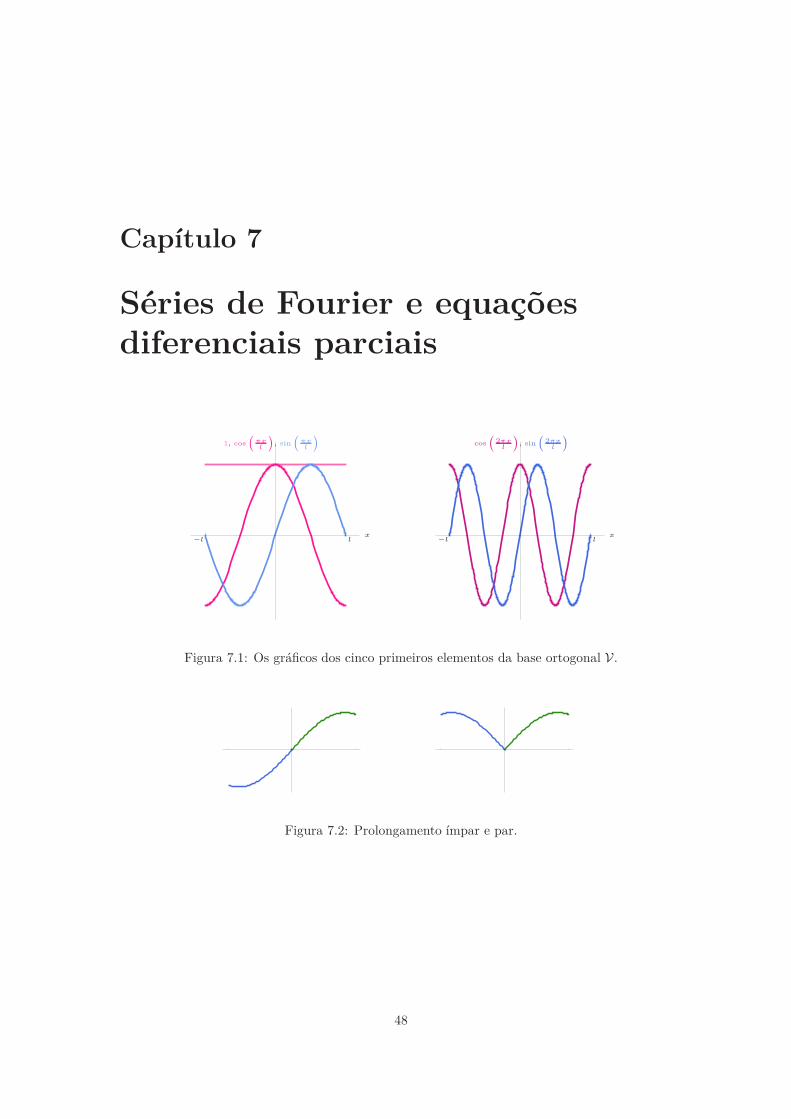
l−lx
1, cos
(
πxl
)
, sin
(
πxl
)
l−lx
cos
(
2πxl
)
, sin
(
2πxl
)
Figura 7.1: Os gráficos dos cinco primeiros elementos da base ortogonal V .
Figura 7.2: Prolongamento ímpar e par.
48
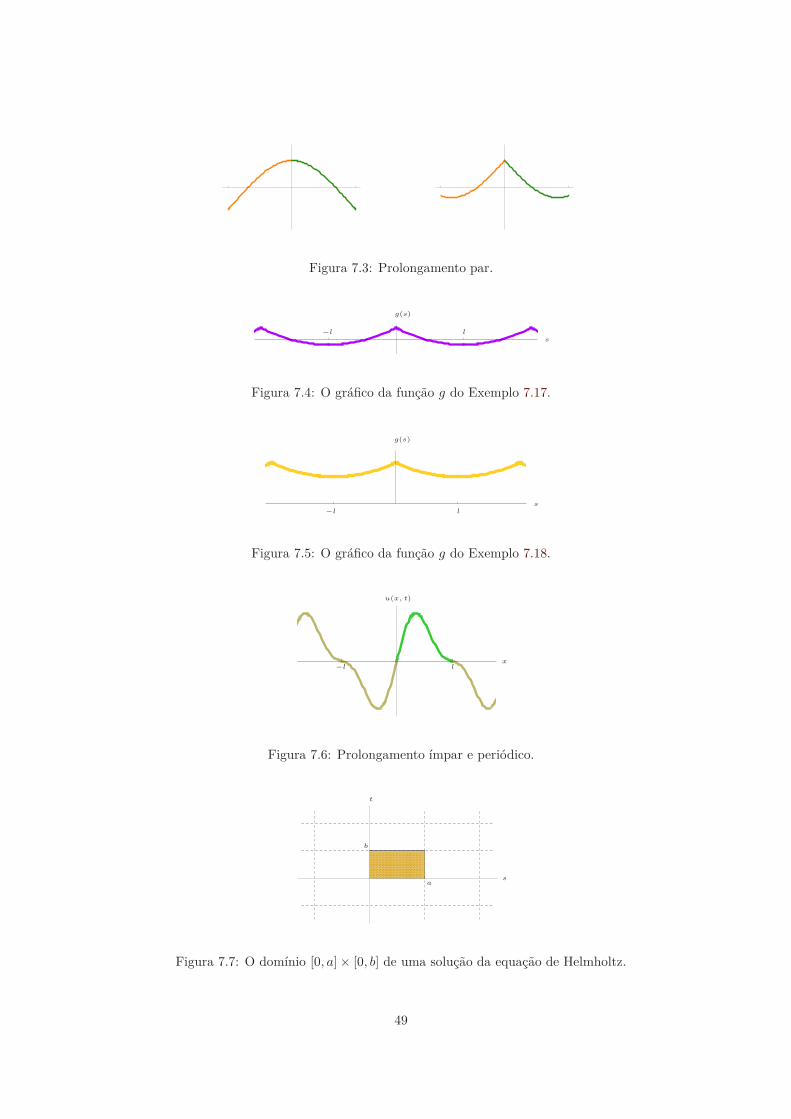
Figura 7.3: Prolongamento par.
l−ls
g(s)
Figura 7.4: O gráfico da função g do Exemplo 7.17.
l−ls
g(s)
Figura 7.5: O gráfico da função g do Exemplo 7.18.
x−l l
u(x, t)
Figura 7.6: Prolongamento ímpar e periódico.
s
t
a
b
Figura 7.7: O domínio [0, a] × [0, b] de uma solução da equação de Helmholtz.
49

Figura 7.8: O gráfico de uma solução da equação de Helmholtz com condições de Dirichlet homo-géneas.
Figura 7.9: O gráfico do prolongamento de uma solução da equação de Helmholtz com condiçõesde Dirichlet homogéneas.
θl
θr
x0 lx x + ∆x
T
T
Tr
Tl
u(x, t)
Figura 7.10: Representação de uma corda e das tensões nos pontos x e x + ∆x.
x
t
l
Figura 7.11: O domínio [0, l] × [0, +∞[ da temperatura u.
50
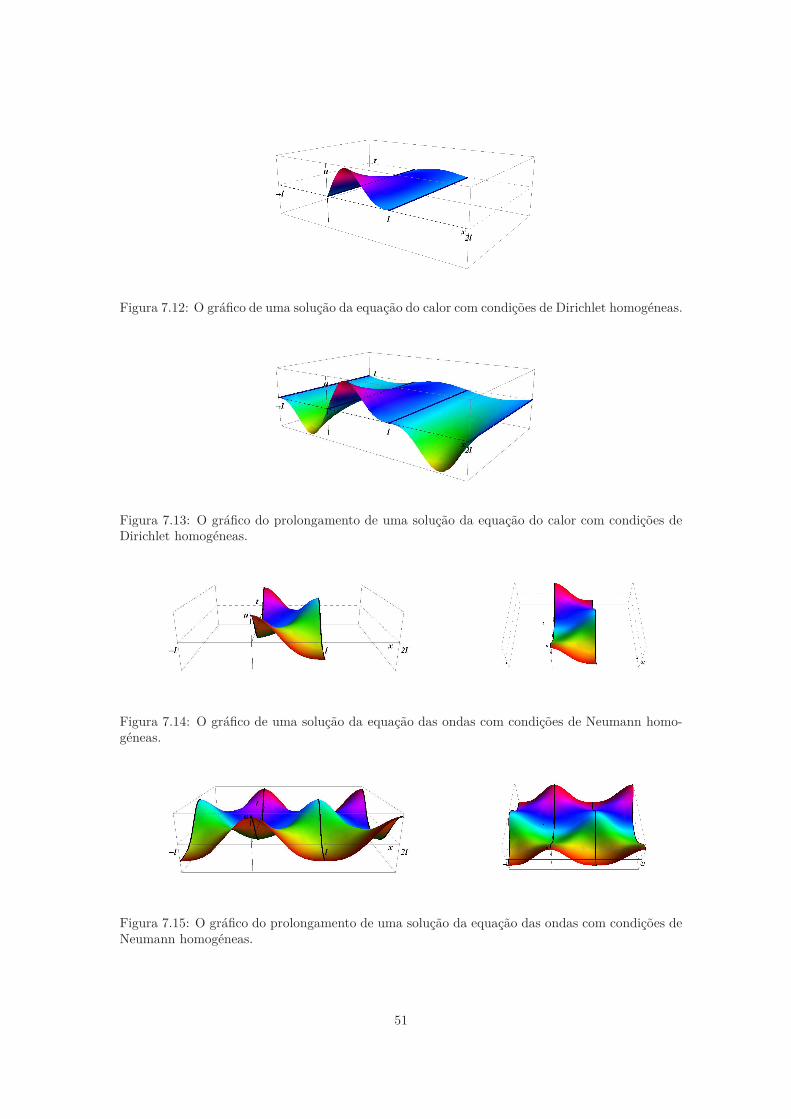
Figura 7.12: O gráfico de uma solução da equação do calor com condições de Dirichlet homogéneas.
Figura 7.13: O gráfico do prolongamento de uma solução da equação do calor com condições deDirichlet homogéneas.
Figura 7.14: O gráfico de uma solução da equação das ondas com condições de Neumann homo-géneas.
Figura 7.15: O gráfico do prolongamento de uma solução da equação das ondas com condições deNeumann homogéneas.
51
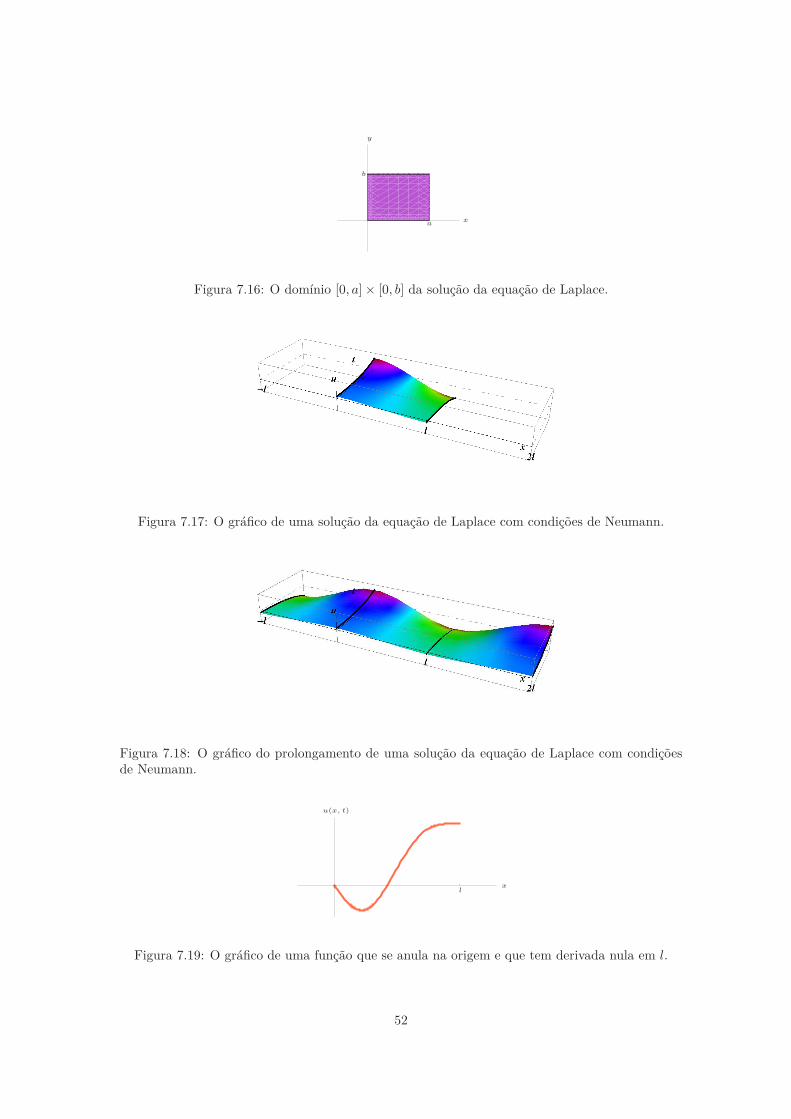
x
y
a
b
Figura 7.16: O domínio [0, a] × [0, b] da solução da equação de Laplace.
Figura 7.17: O gráfico de uma solução da equação de Laplace com condições de Neumann.
Figura 7.18: O gráfico do prolongamento de uma solução da equação de Laplace com condiçõesde Neumann.
xl
u(x, t)
Figura 7.19: O gráfico de uma função que se anula na origem e que tem derivada nula em l.
52

x−l l−2l 2l
u(x, t)
Figura 7.20: O prolongamento regular de uma função que satisfaz condições fronteira mistas.
Figura 7.21: O prolongamento de uma solução da equação do calor com condições fronteira mistas.
x
sin
(
πx2l
)
l 2l−2l −l
1
−1
x
sin
(
3πx2l
)
l 2l−2l −l
1
−1
Figura 7.22: O gráfico de x 7→ sin(
nπx2l
)
para n = 1 e 3.
x
sin
(
2πx2l
)
l 2l−2l −l
1
−1
x
sin
(
4πx2l
)
l 2l−2l −l
1
−1
Figura 7.23: O gráfico de x 7→ sin(
nπx2l
)
para n = 2 e 4.
53
-1 0 1
-1
0
1
-1 0 1
-1
0
1
s
t
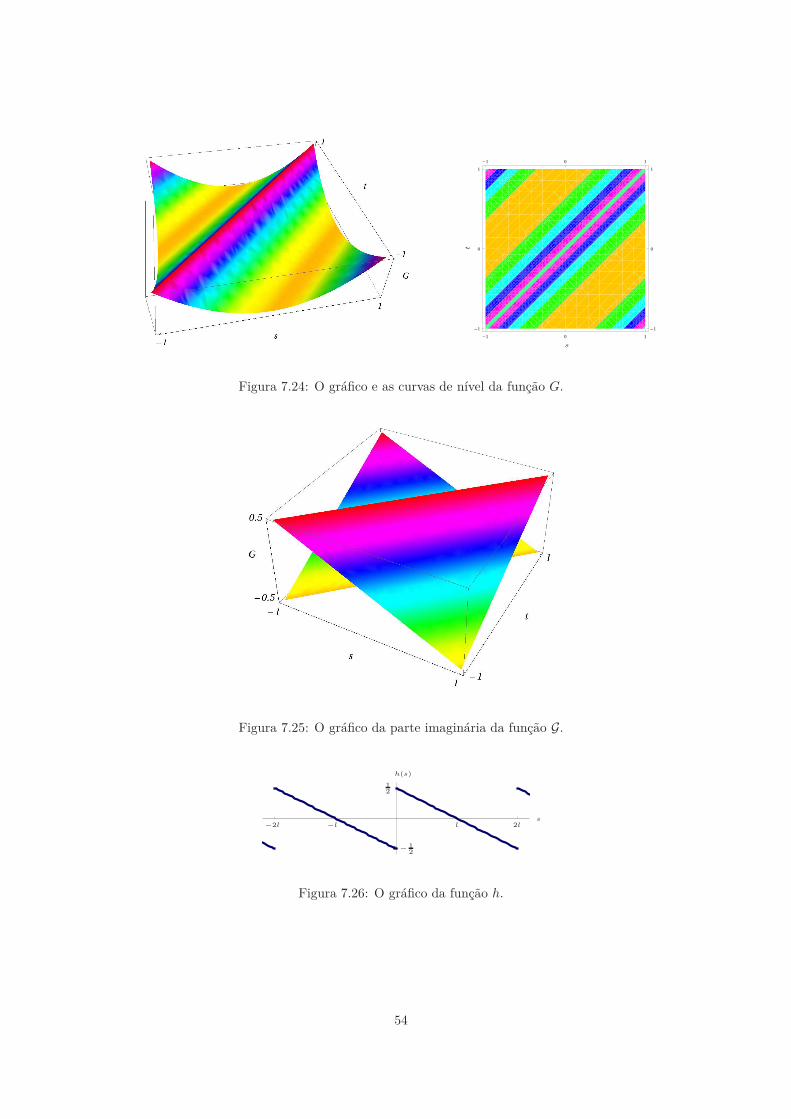
Figura 7.24: O gráfico e as curvas de nível da função G.
Figura 7.25: O gráfico da parte imaginária da função G.
−2l −l l 2ls
h(s)
− 12
12
Figura 7.26: O gráfico da função h.
54
x
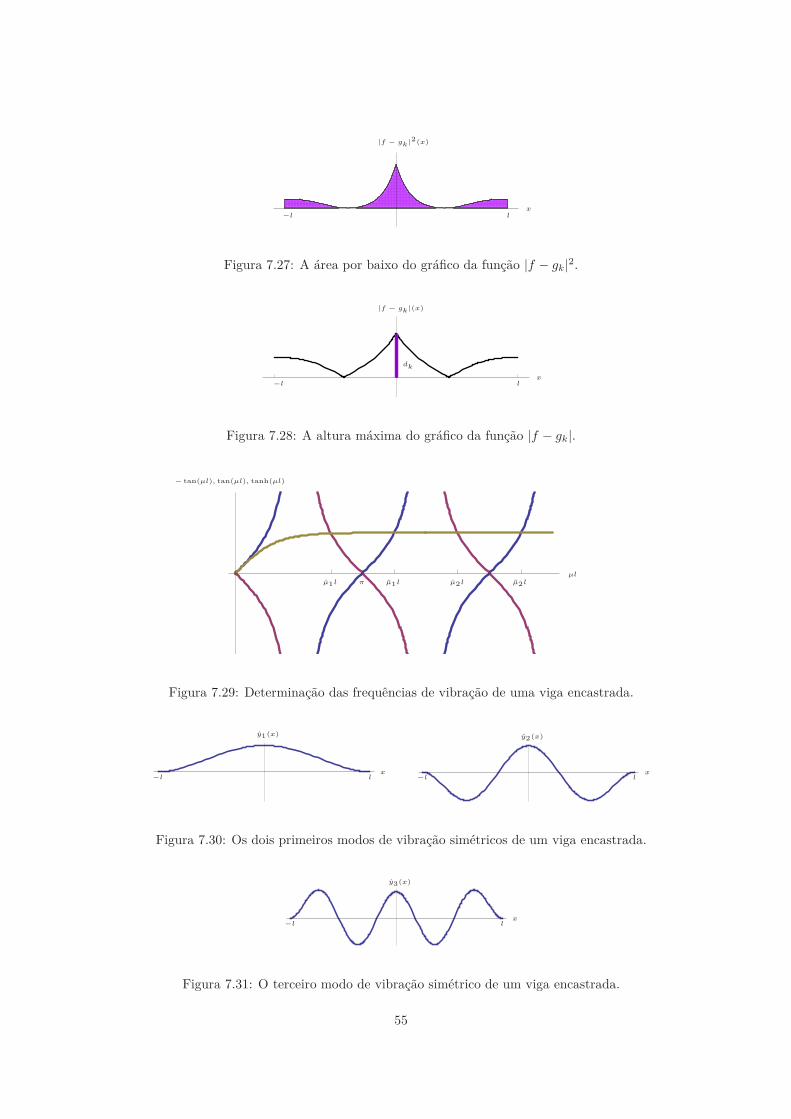
|f − gk|2(x)
l−l
Figura 7.27: A área por baixo do gráfico da função |f − gk|2.
x
dk
|f − gk|(x)
l−l
Figura 7.28: A altura máxima do gráfico da função |f − gk|.
µl
− tan(µl), tan(µl), tanh(µl)
µ1lµ1l µ2lµ2lπ
Figura 7.29: Determinação das frequências de vibração de uma viga encastrada.
x−l l
y1(x)
x−l l
y2(x)
Figura 7.30: Os dois primeiros modos de vibração simétricos de um viga encastrada.
x−l l
y3(x)
Figura 7.31: O terceiro modo de vibração simétrico de um viga encastrada.
55

x−l l
y1(x)
x−l l
y2(x)
Figura 7.32: Os dois primeiros modos de vibração anti-simétricos de um viga encastrada.
x−l l
y3(x)
Figura 7.33: O terceiro modo de vibração anti-simétrico de um viga encastrada.
s
t
Figura 7.34: O gráfico e as curvas de nível da função G.
-
x
u(x, 0)1
11 2
Figura 7.35: Gráfico de uma velocidade inicial crescente.
56

replacemen
Figura 7.36: Um gráfico da velocidade de partículas descrita pela equação de Burgers.
- -
x
u(x, 0)
1
11 22
Figura 7.37: Gráfico de uma velocidade inicial decrescente.
Figura 7.38: Outro gráfico da velocidade de partículas descrita pela equação de Burgers.
57
replacemen
- -
- -
1
11
1
11
2
22
2
22
0
0
0
0
x
t
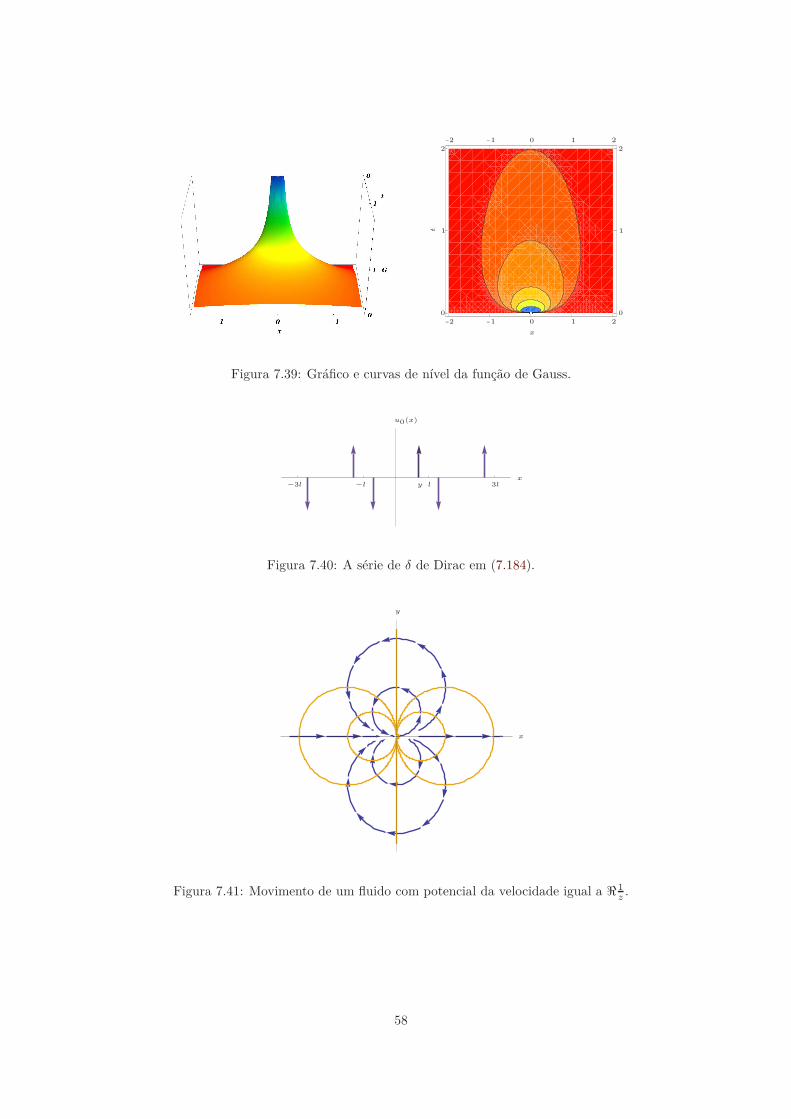
Figura 7.39: Gráfico e curvas de nível da função de Gauss.
l 3l−l−3lx
y
u0(x)
Figura 7.40: A série de δ de Dirac em (7.184).
x
y
Figura 7.41: Movimento de um fluido com potencial da velocidade igual a ℜ 1z.
58
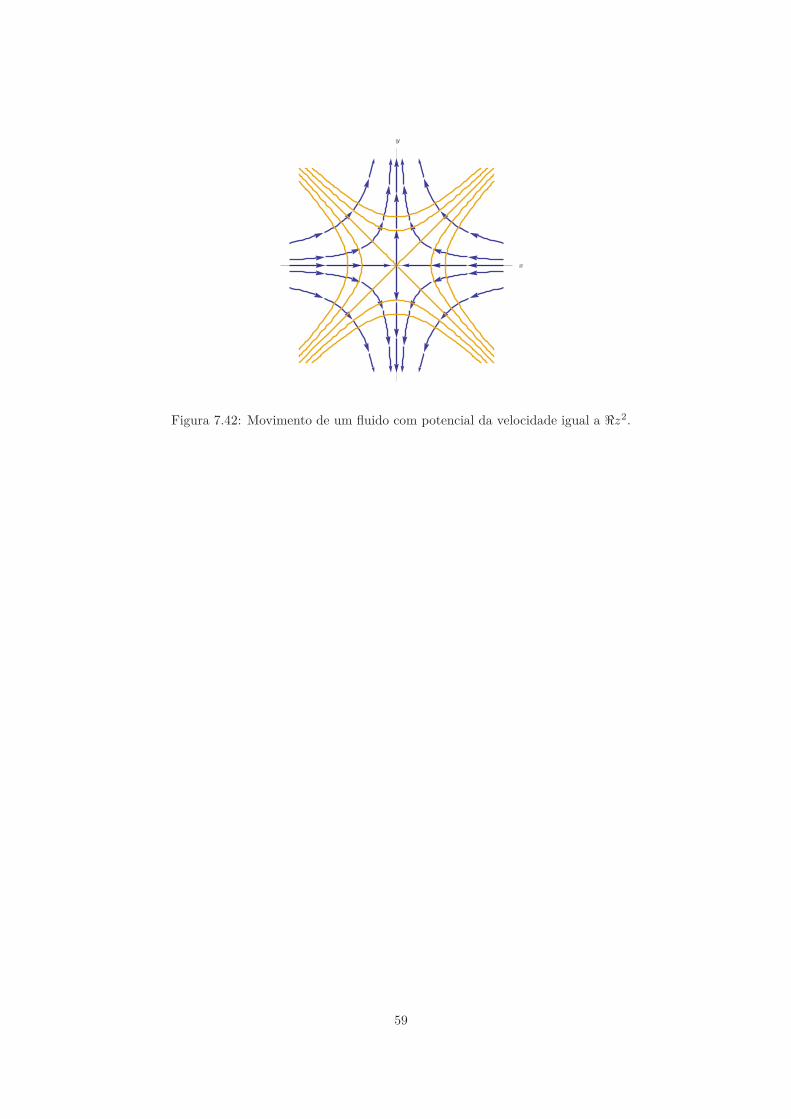
x
y
Figura 7.42: Movimento de um fluido com potencial da velocidade igual a ℜz2.
59
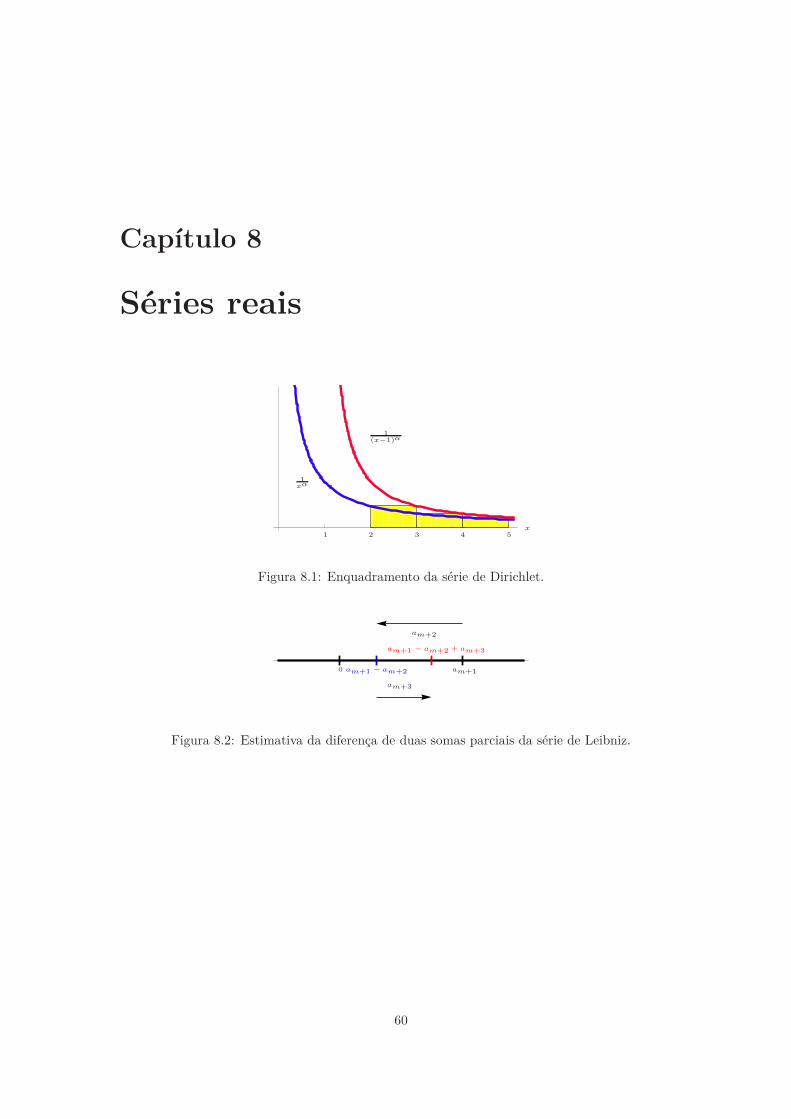
Capítulo 8
Séries reais
1(x−1)α
1xα
1 2 3 4 5x
Figura 8.1: Enquadramento da série de Dirichlet.
am+1am+1 − am+2
am+1 − am+2 + am+3
am+2
am+3
0
Figura 8.2: Estimativa da diferença de duas somas parciais da série de Leibniz.
60

Capítulo 9
Soluções dos exercícios propostos
ℜz
iℑz
−2 2
−2i
2i
Figura 9.1: As raízes cúbicas de −8i.
2
2i
ℜz
iℑz
2i
ℜ√
2E(i π4
)z
iℑ√
2E(i π4
)z
Figura 9.2: Representação geométrica da imagem de um conjunto por z 7→√
2E(i π4 )z.
61
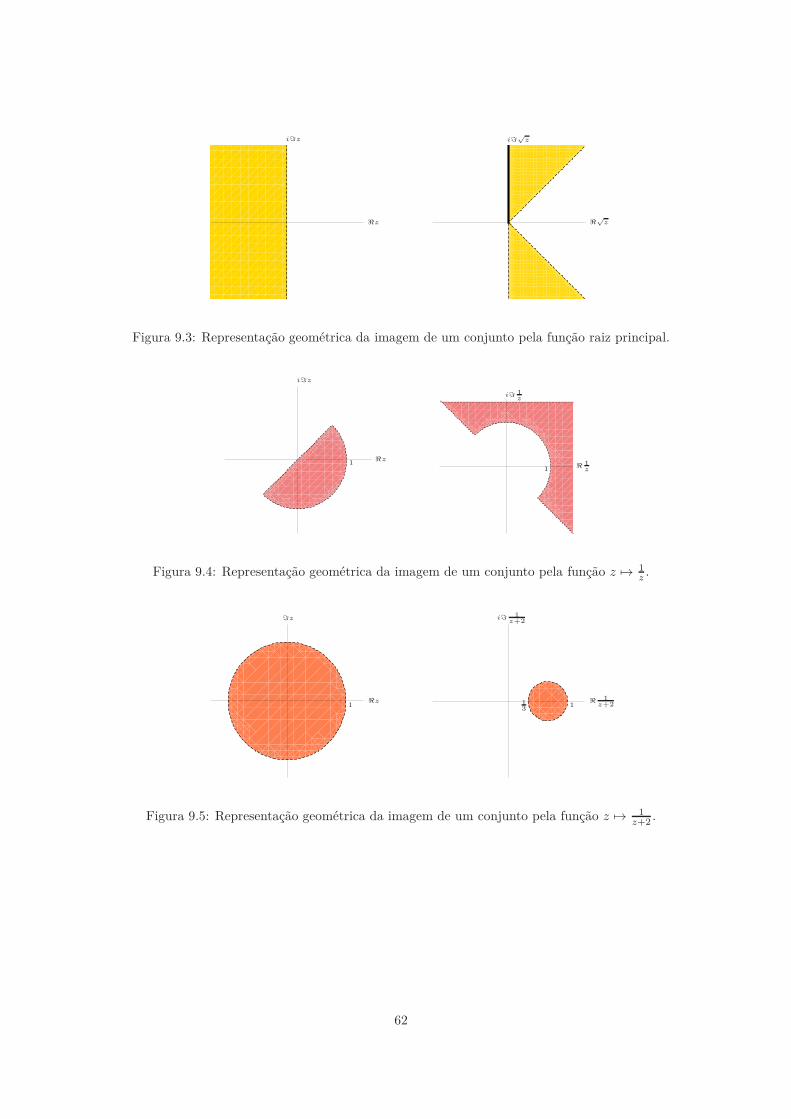
ℜz
iℑz
ℜ√z
iℑ√z
Figura 9.3: Representação geométrica da imagem de um conjunto pela função raiz principal.
1ℜz
iℑz
1 ℜ 1z
iℑ 1z
Figura 9.4: Representação geométrica da imagem de um conjunto pela função z 7→ 1z.
ℜz
ℑz
1ℜ 1
z+2
iℑ 1z+2
113
Figura 9.5: Representação geométrica da imagem de um conjunto pela função z 7→ 1z+2 .
62
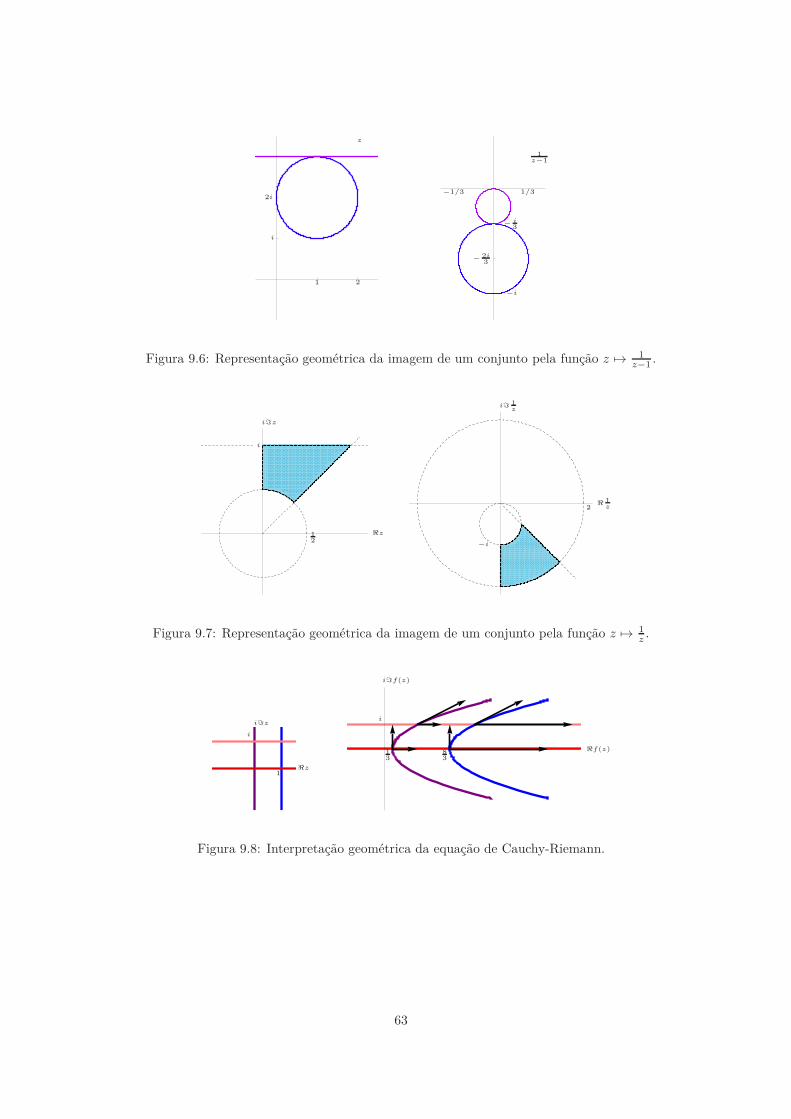
z
1 2
i
2i
1z−1
−1/3 1/3
− i3
− 2i3
−i
Figura 9.6: Representação geométrica da imagem de um conjunto pela função z 7→ 1z−1 .
iℑz
ℜz12
i
iℑ 1z
ℜ 1z2
−i
Figura 9.7: Representação geométrica da imagem de um conjunto pela função z 7→ 1z.
1
i
ℜz
iℑz
13
83
i
ℜf(z)
iℑf(z)
Figura 9.8: Interpretação geométrica da equação de Cauchy-Riemann.
63
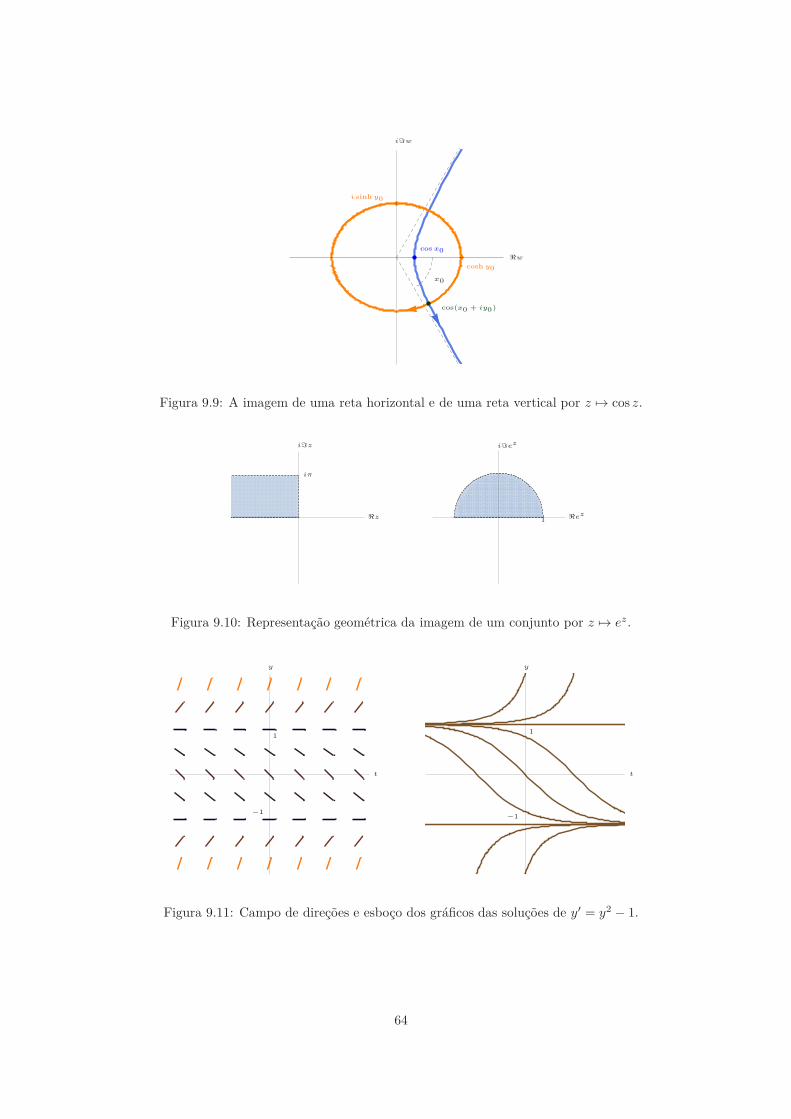
cos x0
cos(x0 + iy0)
x0
ℜw
iℑw
cosh y0
i sinh y0
Figura 9.9: A imagem de uma reta horizontal e de uma reta vertical por z 7→ cos z.
iπ
ℜz
iℑz
1 ℜez
iℑez
Figura 9.10: Representação geométrica da imagem de um conjunto por z 7→ ez.
1
−1
t
y
1
−1
t
y
Figura 9.11: Campo de direções e esboço dos gráficos das soluções de y′ = y2 − 1.
64
x
y y
t
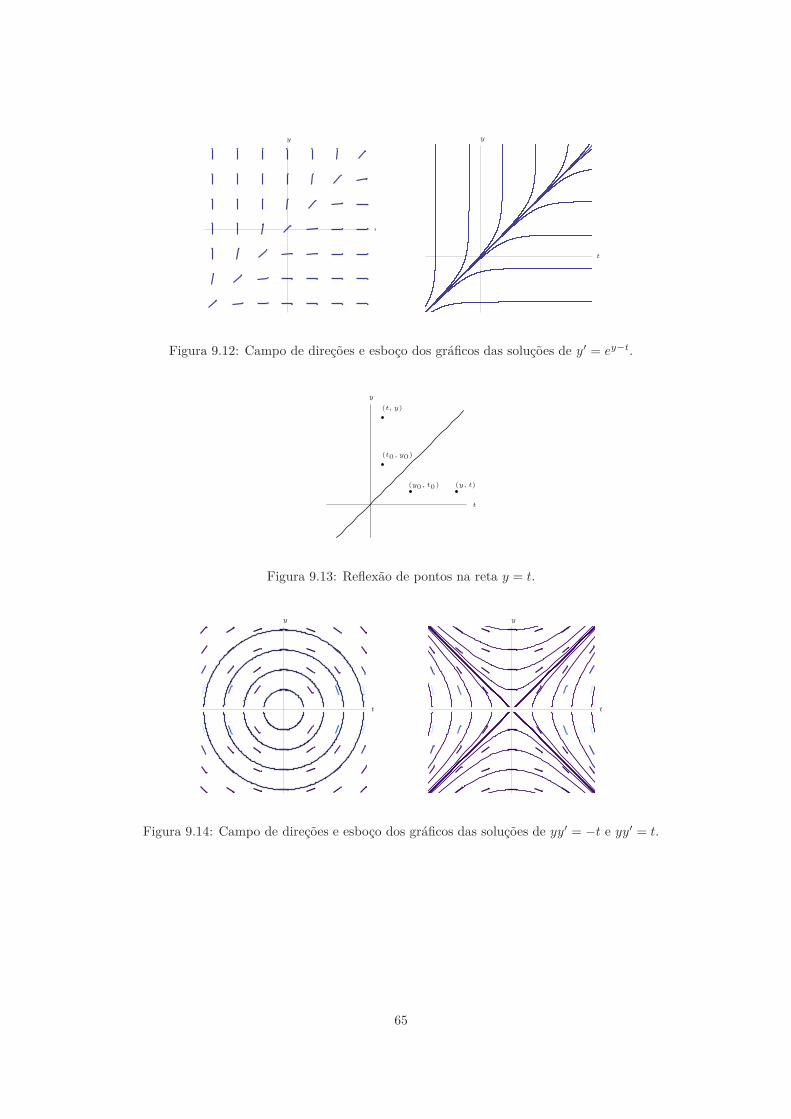
Figura 9.12: Campo de direções e esboço dos gráficos das soluções de y′ = ey−t.
y
t
(t0, y0)
(y0, t0)
(t, y)
(y, t)
Figura 9.13: Reflexão de pontos na reta y = t.
t
y
t
y
Figura 9.14: Campo de direções e esboço dos gráficos das soluções de yy′ = −t e yy′ = t.
65
x
y
−π
π
x
y
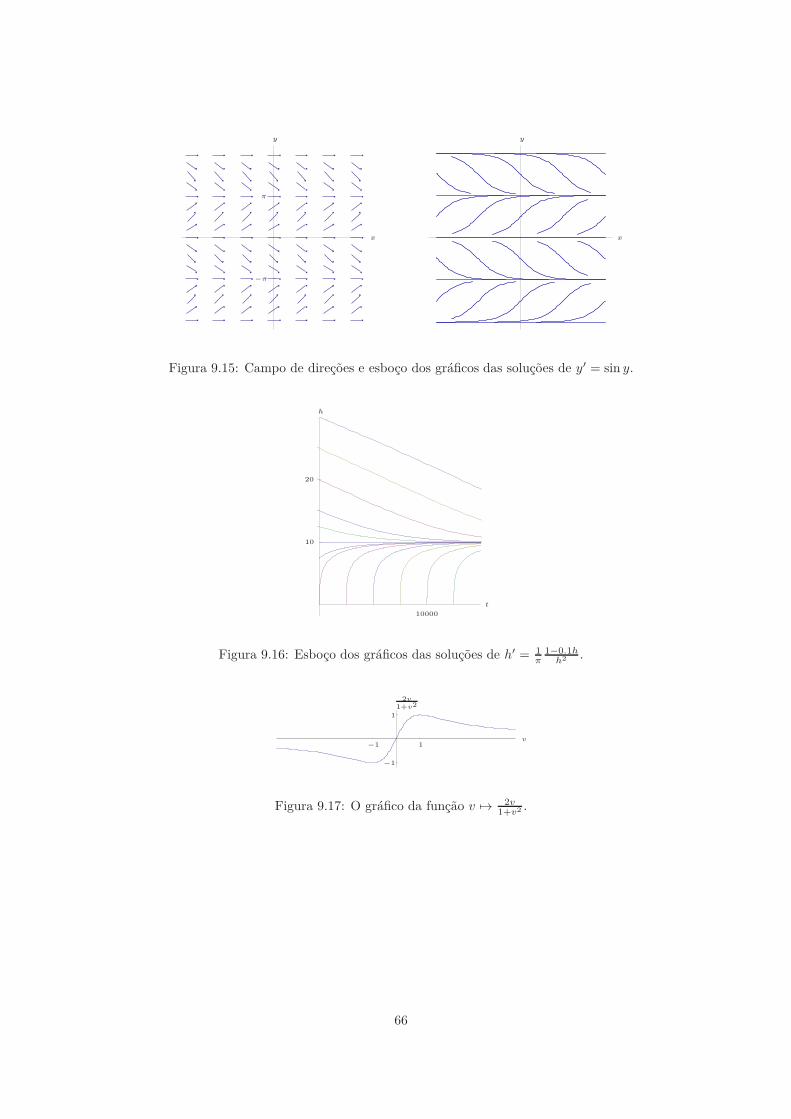
Figura 9.15: Campo de direções e esboço dos gráficos das soluções de y′ = sin y.
t
h
10
20
10000
Figura 9.16: Esboço dos gráficos das soluções de h′ = 1π
1−0.1hh2 .
v1−1
1
−1
2v1+v2
Figura 9.17: O gráfico da função v 7→ 2v1+v2 .
66
t
y
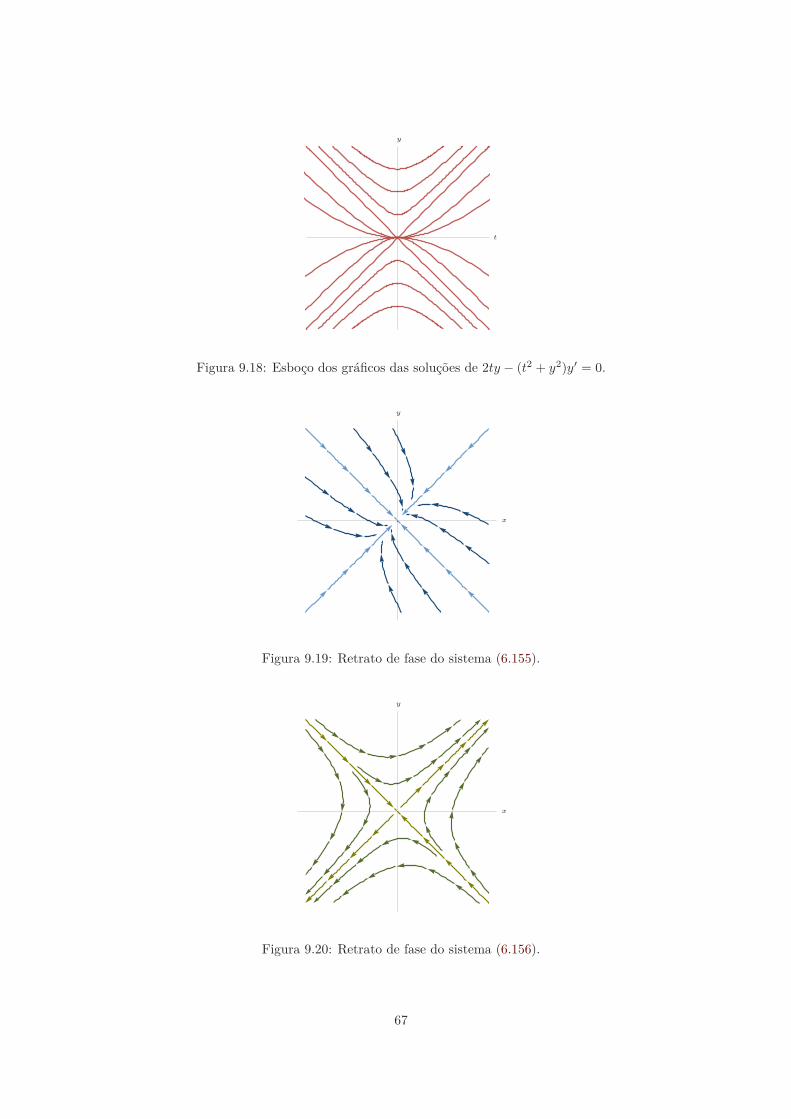
Figura 9.18: Esboço dos gráficos das soluções de 2ty − (t2 + y2)y′ = 0.
x
y
Figura 9.19: Retrato de fase do sistema (6.155).
x
y
Figura 9.20: Retrato de fase do sistema (6.156).
67
x
y
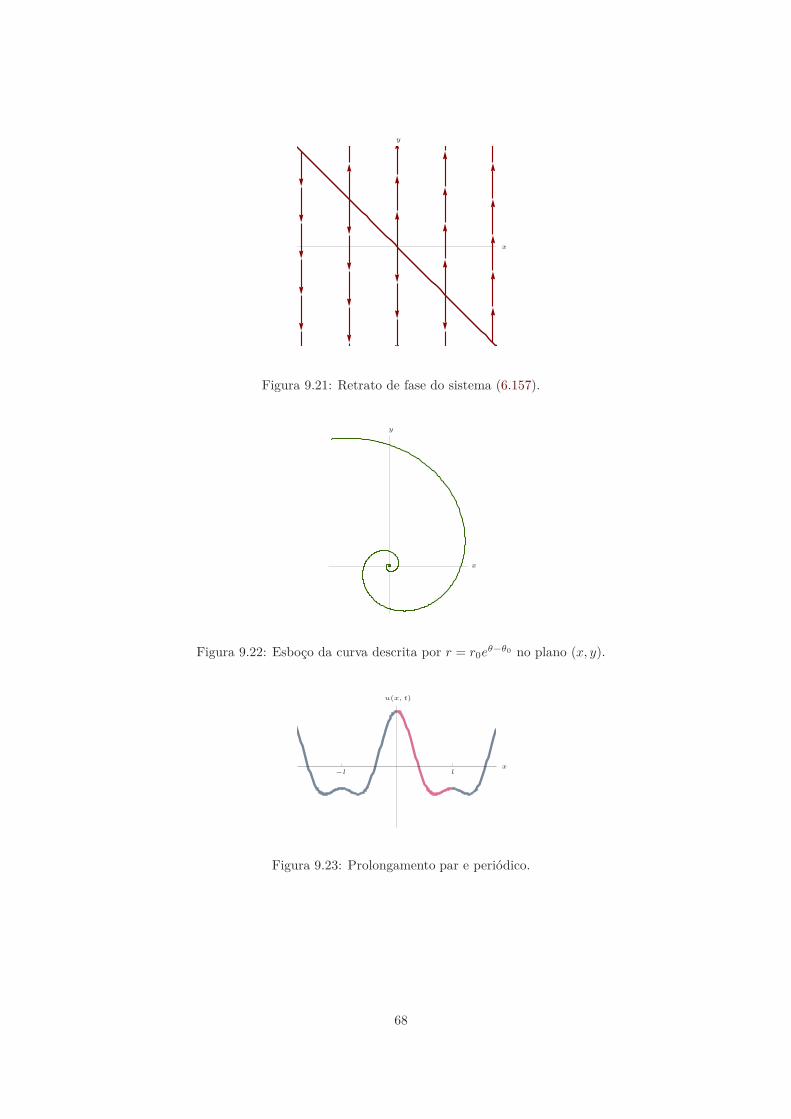
Figura 9.21: Retrato de fase do sistema (6.157).
x
y
Figura 9.22: Esboço da curva descrita por r = r0eθ−θ0 no plano (x, y).
x−l l
u(x, t)
Figura 9.23: Prolongamento par e periódico.
68
x
y
π
−π
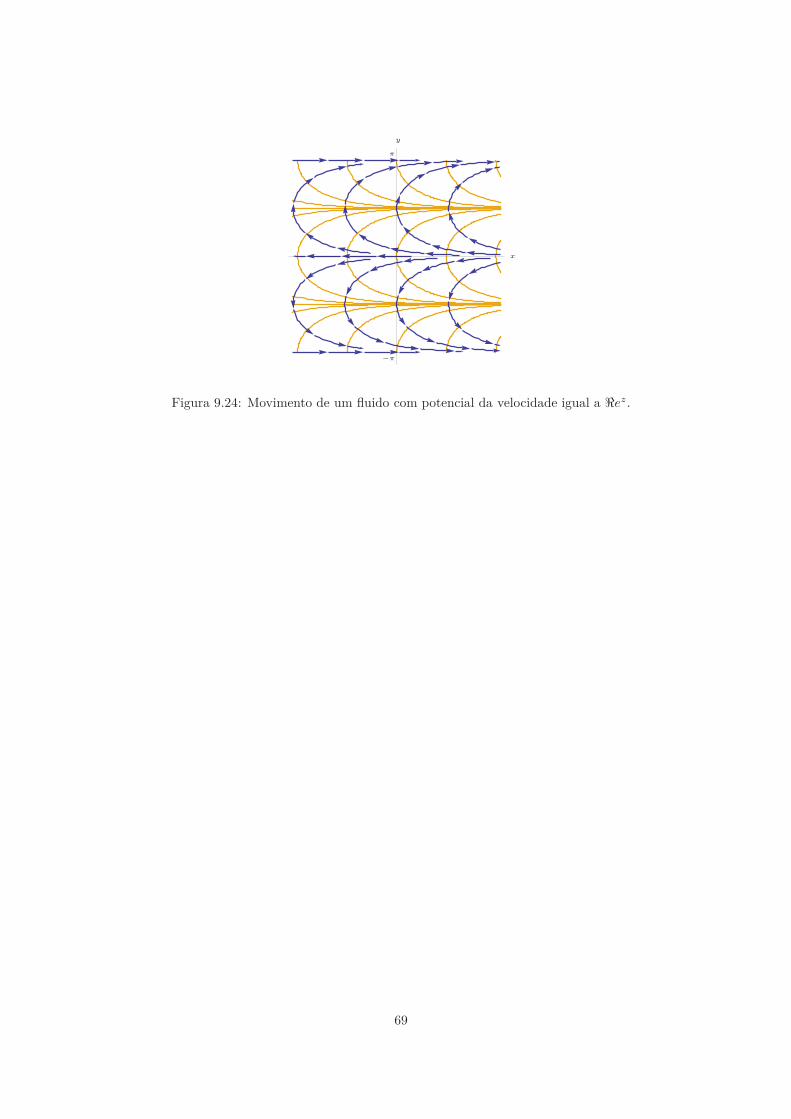
Figura 9.24: Movimento de um fluido com potencial da velocidade igual a ℜez.
69













![Alfred O. Hero matchingweb.eecs.umich.edu/~hero/Preprints/jussieu_01.pdf · Divergence Measures Refs: [Csisz ´ ar:67,Basseville:SP89] Define densities f i = f (z j θ i); f R =](https://static.fdocument.org/doc/165x107/60018172cf65a227b95548ca/alfred-o-hero-heropreprintsjussieu01pdf-divergence-measures-refs-csisz.jpg)



![alina/ma253.pdf3 1. Introduction Let Q = a b ;a,b ∈ Z,b 6= 0. Then we can regard Z as Z = {α ∈ Q;f(α) = 0 for some f(X) = X +b ∈ Z[X]}. We can associate with Z the Riemann](https://static.fdocument.org/doc/165x107/5f40906ab5e05c1745203801/alinama253pdf-3-1-introduction-let-q-a-b-ab-a-zb-6-0-then-we-can-regard.jpg)
