
Fast parallelizable scenario-based stochastic optimization
38
Fast parallelizable scenario-based stochastic optimization Ajay K. Sampathirao * , Pantelis Sopasakis * , Alberto Bemporad * , Panos Patrinos ** * IMT School for Advanced Studies Lucca, Italy, ** ESAT, KU Leuven, Belgium. September 14, 2016
-
Upload
pantelis-sopasakis -
Category
Engineering
-
view
97 -
download
4
Transcript of Fast parallelizable scenario-based stochastic optimization
Fast parallelizable scenario-based stochasticoptimization
Ajay K. Sampathirao∗, Pantelis Sopasakis∗,Alberto Bemporad∗, Panos Patrinos∗∗
∗ IMT School for Advanced Studies Lucca, Italy,∗∗ ESAT, KU Leuven, Belgium.
September 14, 2016
I. Stochastic Optimal Control
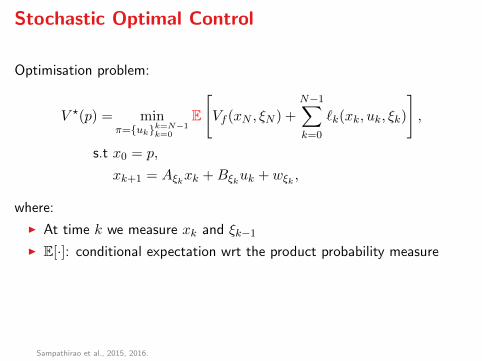
Stochastic Optimal Control
Optimisation problem:
V ?(p) = minπ=ukk=N−1
k=0
E
[Vf (xN , ξN ) +
N−1∑k=0
`k(xk, uk, ξk)
],
s.t x0 = p,
xk+1 = Aξkxk +Bξkuk + wξk ,
where:
I At time k we measure xk and ξk−1I E[·]: conditional expectation wrt the product probability measure
I Casual policy uk = ψk(p,ξξξk−1), with ξξξk = (ξ0, ξ1, . . . , ξk)
I ` and Vf can encode constraints
Sampathirao et al., 2015, 2016.
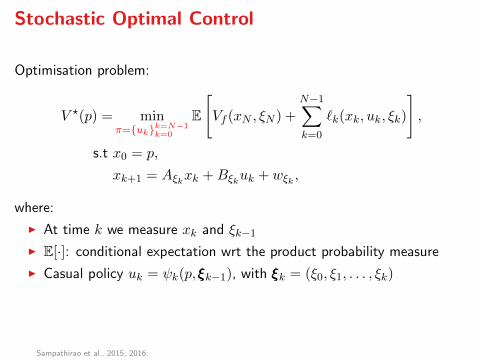
Stochastic Optimal Control
Optimisation problem:
V ?(p) = minπ=ukk=N−1
k=0
E
[Vf (xN , ξN ) +
N−1∑k=0
`k(xk, uk, ξk)
],
s.t x0 = p,
xk+1 = Aξkxk +Bξkuk + wξk ,
where:
I At time k we measure xk and ξk−1
I E[·]: conditional expectation wrt the product probability measure
I Casual policy uk = ψk(p,ξξξk−1), with ξξξk = (ξ0, ξ1, . . . , ξk)
I ` and Vf can encode constraints
Sampathirao et al., 2015, 2016.
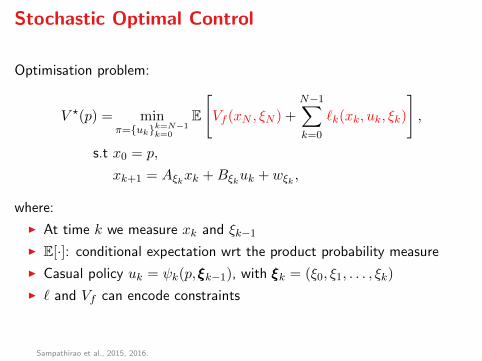
Stochastic Optimal Control
Optimisation problem:
V ?(p) = minπ=ukk=N−1
k=0
E
[Vf (xN , ξN ) +
N−1∑k=0
`k(xk, uk, ξk)
],
s.t x0 = p,
xk+1 = Aξkxk +Bξkuk + wξk ,
where:
I At time k we measure xk and ξk−1I E[·]: conditional expectation wrt the product probability measure
I Casual policy uk = ψk(p,ξξξk−1), with ξξξk = (ξ0, ξ1, . . . , ξk)
I ` and Vf can encode constraints
Sampathirao et al., 2015, 2016.
Stochastic Optimal Control
Optimisation problem:
V ?(p) = minπ=ukk=N−1
k=0
E
[Vf (xN , ξN ) +
N−1∑k=0
`k(xk, uk, ξk)
],
s.t x0 = p,
xk+1 = Aξkxk +Bξkuk + wξk ,
where:
I At time k we measure xk and ξk−1I E[·]: conditional expectation wrt the product probability measure
I Casual policy uk = ψk(p,ξξξk−1), with ξξξk = (ξ0, ξ1, . . . , ξk)
I ` and Vf can encode constraints
Sampathirao et al., 2015, 2016.
Stochastic Optimal Control
Optimisation problem:
V ?(p) = minπ=ukk=N−1
k=0
E
[Vf (xN , ξN ) +
N−1∑k=0
`k(xk, uk, ξk)
],
s.t x0 = p,
xk+1 = Aξkxk +Bξkuk + wξk ,
where:
I At time k we measure xk and ξk−1I E[·]: conditional expectation wrt the product probability measure
I Casual policy uk = ψk(p,ξξξk−1), with ξξξk = (ξ0, ξ1, . . . , ξk)
I ` and Vf can encode constraints
Sampathirao et al., 2015, 2016.
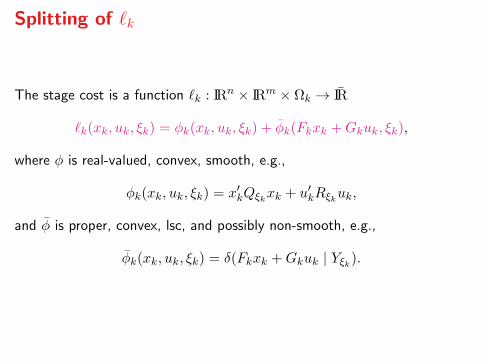
Splitting of `k
The stage cost is a function `k : IRn × IRm × Ωk → IR
`k(xk, uk, ξk) = φk(xk, uk, ξk) + φk(Fkxk +Gkuk, ξk),
where φ is real-valued, convex, smooth, e.g.,
φk(xk, uk, ξk) = x′kQξkxk + u′kRξkuk,
and φ is proper, convex, lsc, and possibly non-smooth, e.g.,
φk(xk, uk, ξk) = δ(Fkxk +Gkuk | Yξk).

Scenario tree
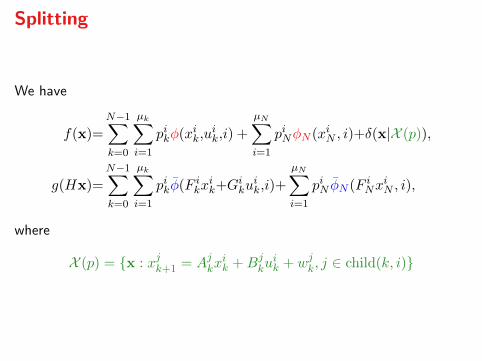
Splitting
We have
f(x)=
N−1∑k=0
µk∑i=1
pikφ(xik,uik,i) +
µN∑i=1
piNφN (xiN , i)+δ(x|X (p)),
g(Hx)=
N−1∑k=0
µk∑i=1
pikφ(F ikxik+G
iku
ik,i)+
µN∑i=1
piN φN (F iNxiN , i),
where
X (p) = x : xjk+1 = Ajkxik +Bj
kuik + wjk, j ∈ child(k, i)
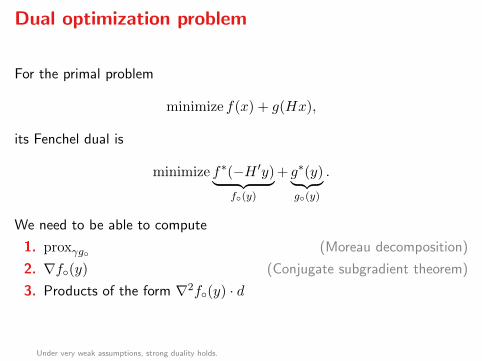
Dual optimization problem
For the primal problem
minimize f(x) + g(Hx),
its Fenchel dual is
minimize f∗(−H ′y)︸ ︷︷ ︸f(y)
+ g∗(y)︸ ︷︷ ︸g(y)
.
We need to be able to compute
1. proxγg (Moreau decomposition)
2. ∇f(y) (Conjugate subgradient theorem)
3. Products of the form ∇2f(y) · d
Under very weak assumptions, strong duality holds.
II. The Forward-BackwardLine-Search Algorithm
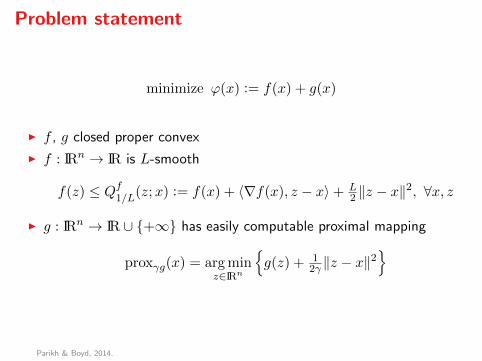
Problem statement
minimize ϕ(x) := f(x) + g(x)
I f , g closed proper convex
I f : IRn → IR is L-smooth
f(z) ≤ Qf1/L(z;x) := f(x) + 〈∇f(x), z − x〉+ L2 ‖z − x‖
2, ∀x, z
I g : IRn → IR ∪ +∞ has easily computable proximal mapping
proxγg(x) = arg minz∈IRn
g(z) + 1
2γ ‖z − x‖2
Parikh & Boyd, 2014.
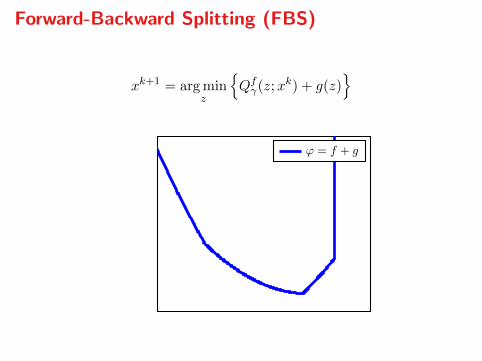
Forward-Backward Splitting (FBS)
xk+1 = arg minz
Qfγ(z;xk) + g(z)
x0
ϕ(x0)
ϕ = f + g
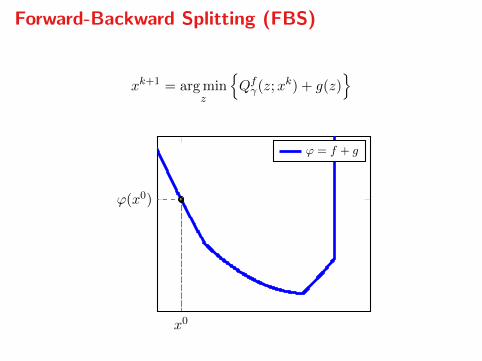
Forward-Backward Splitting (FBS)
xk+1 = arg minz
Qfγ(z;xk) + g(z)
x0
ϕ(x0)
ϕ = f + g
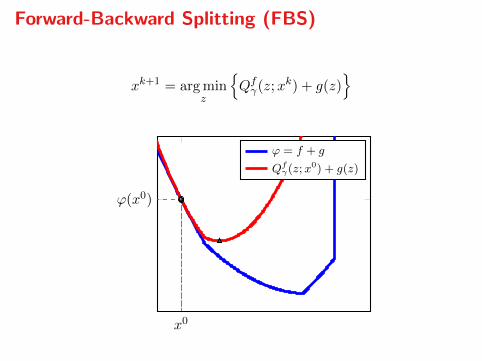
Forward-Backward Splitting (FBS)
xk+1 = arg minz
Qfγ(z;xk) + g(z)
x0
ϕ(x0)
ϕ = f + g
Qfγ(z;x
0) + g(z)
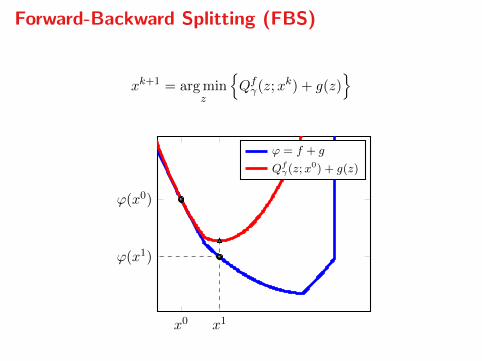
Forward-Backward Splitting (FBS)
xk+1 = arg minz
Qfγ(z;xk) + g(z)
x0 x1
ϕ(x0)
ϕ(x1)
ϕ = f + g
Qfγ(z;x
0) + g(z)
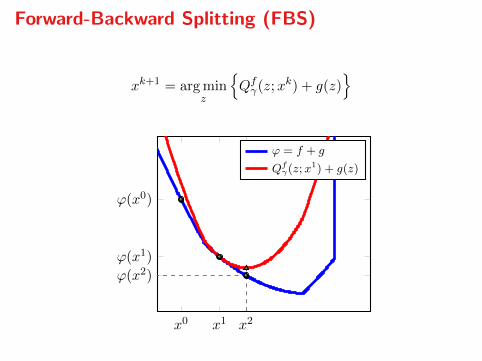
Forward-Backward Splitting (FBS)
xk+1 = arg minz
Qfγ(z;xk) + g(z)
x0 x1 x2
ϕ(x0)
ϕ(x1)
ϕ(x2)
ϕ = f + g
Qfγ(z;x
1) + g(z)
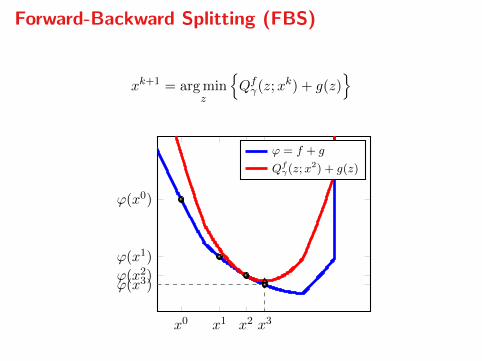
Forward-Backward Splitting (FBS)
xk+1 = arg minz
Qfγ(z;xk) + g(z)
x0 x1 x2 x3
ϕ(x0)
ϕ(x1)
ϕ(x2)ϕ(x3)
ϕ = f + g
Qfγ(z;x
2) + g(z)
Forward-Backward Splitting (FBS)
The basic FBS algorithm is
xk+1 = proxγg(xk − γ∇f(xk))
which is a fixed point iteration for
x = proxγg(x− γ∇f(x)).
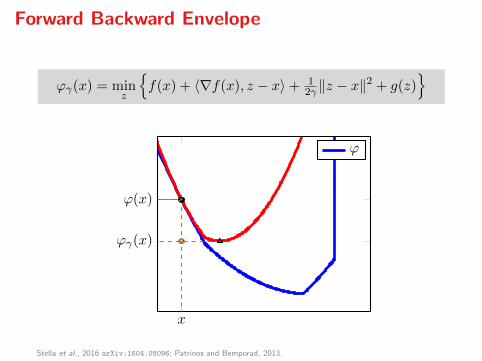
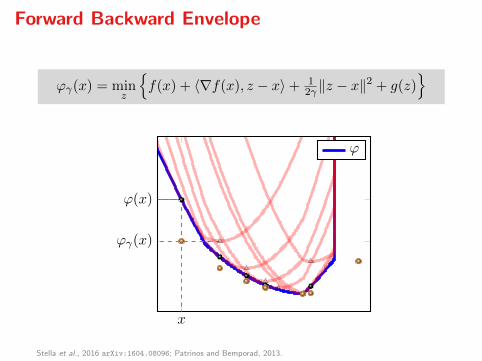
Forward Backward Envelope
ϕγ(x) = minz
f(x) + 〈∇f(x), z − x〉+ 1
2γ ‖z − x‖2 + g(z)
x
ϕ(x)
ϕγ(x)
ϕ
Stella et al., 2016 arXiv:1604.08096; Patrinos and Bemporad, 2013.
Forward Backward Envelope
ϕγ(x) = minz
f(x) + 〈∇f(x), z − x〉+ 1
2γ ‖z − x‖2 + g(z)
x
ϕ(x)
ϕγ(x)
ϕ
Stella et al., 2016 arXiv:1604.08096; Patrinos and Bemporad, 2013.
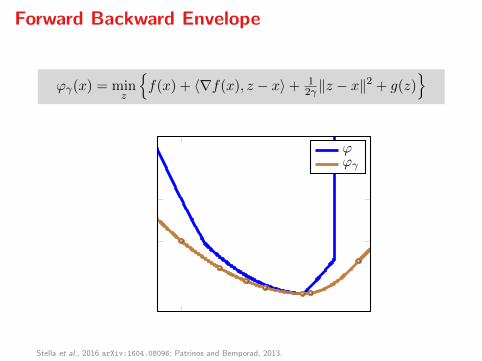
Forward Backward Envelope
ϕγ(x) = minz
f(x) + 〈∇f(x), z − x〉+ 1
2γ ‖z − x‖2 + g(z)
x
ϕ(x)
ϕγ(x)
ϕϕγ
Stella et al., 2016 arXiv:1604.08096; Patrinos and Bemporad, 2013.
Forward Backward Envelope
Key property. The FBE ϕγ is always real-valued and
inf ϕ = inf ϕγ
arg minϕ = arg minϕγ
Minimizing ϕ becomes equivalent to solving an unconstrained optimizationproblem. If f ∈ C2 then ϕγ ∈ C1 and
∇ϕγ(x) = (I − γ∇2f(x))Rγ(x),
so, arg minϕγ = zer∇ϕγ .
Stella et al., 2016.
LBFGS on FBE
Algorithm 1 Forward-Backward L-BFGS
1: choose γ ∈ (0, 1/L), x0, m (memory), ε (tolerance)2: Initialize an LBFGS buffer with memory m3: while ‖Rγ(xk)‖ > ε do4: dk ← −Bk∇ϕγ(xν) (Using the LBFGS buffer)5: xk+1 ← xk + τkd
k, τk: satisfies Wolfe conditions6: sk ← xk+1 − xk, qk ← ∇ϕγ(xk+1)−∇ϕγ(xk), ρk ← 〈sk, qk〉7: if ρk > 0 then8: Push (sk, qk, ρk) into the LBFGS buffer
Global LBFGS
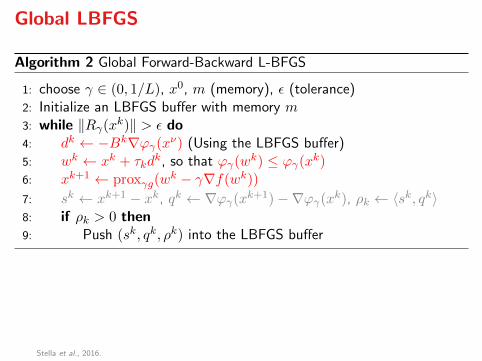
Algorithm 2 Global Forward-Backward L-BFGS
1: choose γ ∈ (0, 1/L), x0, m (memory), ε (tolerance)2: Initialize an LBFGS buffer with memory m3: while ‖Rγ(xk)‖ > ε do4: dk ← −Bk∇ϕγ(xν) (Using the LBFGS buffer)5: wk ← xk + τkd
k, so that ϕγ(wk) ≤ ϕγ(xk)6: xk+1 ← proxγg(w
k − γ∇f(wk))
7: sk ← xk+1 − xk, qk ← ∇ϕγ(xk+1)−∇ϕγ(xk), ρk ← 〈sk, qk〉8: if ρk > 0 then9: Push (sk, qk, ρk) into the LBFGS buffer
Stella et al., 2016.
Global LBFGS
I Any direction dk can be used (LBFGS, nonlinear CG, etc)
I Adaptive version: when L is not known
I ϕ(xk) converges to ϕ? as O(1/k)∗
I Linear convergece if ϕ is strongly convex
I In practice it is very fast
∗Provided ϕ has bounded level sets; Stella et al., 2016.
Stochastic optimal control
The dual gradient, ∇fo(y), is computed using the conjugate subgradienttheorem
∇fo(y) = H arg minz〈z,H ′y〉+ f(z),
which is an unconstrained problem and can be solved with a Ricatti-typerecursion.
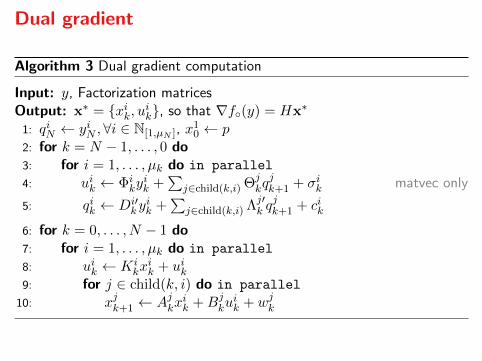
Dual gradient
Algorithm 3 Dual gradient computation
Input: y, Factorization matricesOutput: x∗ = xik, uik, so that ∇f(y) = Hx∗
1: qiN ← yiN ,∀i ∈ N[1,µN ], x10 ← p
2: for k = N − 1, . . . , 0 do3: for i = 1, . . . , µk do in parallel
4: uik ← Φikyik +
∑j∈child(k,i) Θj
kqjk+1 + σik matvec only
5: qik ← Di′ky
ik +
∑j∈child(k,i) Λj′k q
jk+1 + cik
6: for k = 0, . . . , N − 1 do7: for i = 1, . . . , µk do in parallel
8: uik ← Kikx
ik + uik
9: for j ∈ child(k, i) do in parallel
10: xjk+1 ← Ajkxik +Bj
kuik + wjk
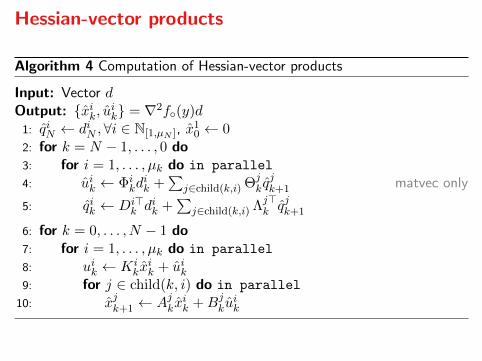
Hessian-vector products
Algorithm 4 Computation of Hessian-vector products
Input: Vector dOutput: xik, uik = ∇2f(y)d1: qiN ← diN ,∀i ∈ N[1,µN ], x
10 ← 0
2: for k = N − 1, . . . , 0 do3: for i = 1, . . . , µk do in parallel
4: uik ← Φikdik +
∑j∈child(k,i) Θj
kqjk+1 matvec only
5: qik ← Di>k dik +
∑j∈child(k,i) Λj>k qjk+1
6: for k = 0, . . . , N − 1 do7: for i = 1, . . . , µk do in parallel
8: uik ← Kikx
ik + uik
9: for j ∈ child(k, i) do in parallel
10: xjk+1 ← Ajkxik +Bj
kuik
III. Results
Implementation
I Implementation on NVIDIA Tesla 2075
I Mass-spring system
I 10 states, 20 inputs, N = 15
I Binary scenario tree
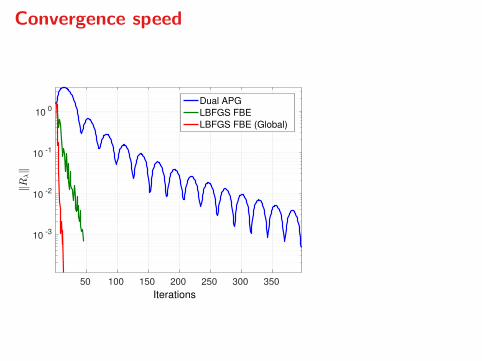
Convergence speed
50 100 150 200 250 300 350
Iterations
10-3
10-2
10-1
100
‖Rλ‖
Dual APG
LBFGS FBE
LBFGS FBE (Global)
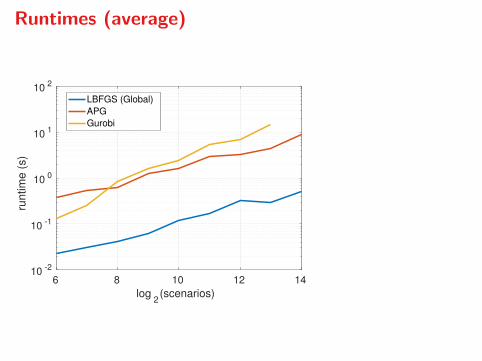
Runtimes (average)
6 8 10 12 14
log2(scenarios)
10-2
10-1
100
101
102
runtim
e (
s)
LBFGS (Global)
APG
Gurobi
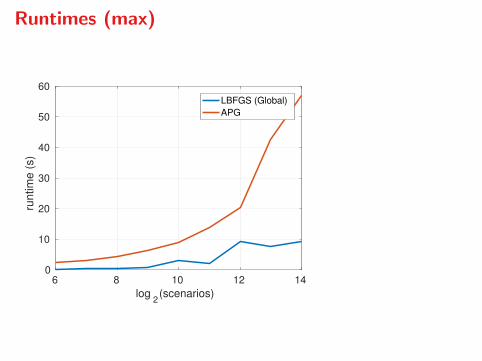
Runtimes (max)
6 8 10 12 14
log2(scenarios)
0
10
20
30
40
50
60
runtim
e (
s)
LBFGS (Global)
APG
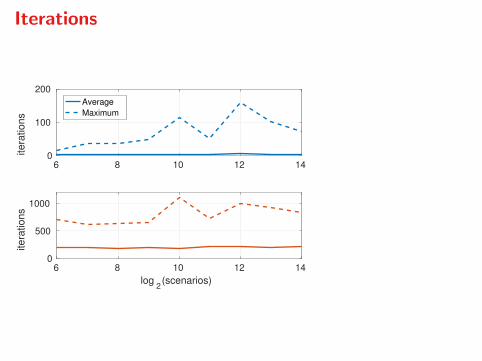
Iterations
6 8 10 12 140
100
200
ite
ratio
ns
Average
Maximum
6 8 10 12 14
log2(scenarios)
0
500
1000
ite
ratio
ns
References
1. A.K. Sampathirao, P. Sopasakis, A. Bemporad and P. Patrinos, “Proximalquasi-Newton methods for scenario-based stochastic optimal control,” IFAC 2017,submitted.
2. A.K. Sampathirao, P. Sopasakis, A. Bemporad and P. Patrinos, “Stochasticpredictive control of drinking water networks: large-scale optimisation and GPUs,”IEEE CST (prov. accepted), arXiv:1604.01074
3. A.K. Sampathirao, P. Sopasakis, A. Bemporad and P. Patrinos, “Distributedsolution of stochastic optimal control problems on GPUs,” in Proc. 54th IEEEConf. on Decision and Control, Osaka, Japan, 2015, pp. 7183–7188.
4. L. Stella, A. Themelis and P. Patrinos, “Forward-backward quasi-Newton methodsfor nonsmooth optimization problems,” arXiv:1604.08096, 2016.
5. P. Patrinos and A. Bemporad, “Proximal Newton methods for convex compositeoptimization,” IEEE CDC 2013.
6. N. Parikh and S. Boyd, “Proximal Algorithms,” Foundations and Trends inOptimization, 1(3), pp. 123–231, 2014.
7. J. Nocedal and S. Wright, “Numerical Optimization,” Springer, 2006.
Thank you for your attention.














![Bouncing scenario in arXiv:1907.08682v3 [gr-qc] 28 Jan 2020](https://static.fdocument.org/doc/165x107/620477112a92340c1e4fa45b/bouncing-scenario-in-arxiv190708682v3-gr-qc-28-jan-2020.jpg)
