Jens Blauert, Bochum Binaural Hearing and Human Sound Localization.

Fast Implementation of
Localization for Ensemble DA
B. Wang1,2 and J.-J. Liu1
1LASG/IAP, Chinese Academy of Sciences
2CESS, Tsinghua University
DAOS-2012,Sep 20, 2012

EnKF The formula of EnKF without localization
obs
TTyrrOrbx 1)(
Localization:
obs
TTyrrρOrbρx yyxy 1))()( (
where ρxy, ρyy : Filtering matrices;
: Schür product operator
),, , ,(1
1
), , , ,(1
1
21
21
yy yyyyr
xxxxxxb
n
n
n
n
1
1
n
1i
1
i
n
i
i
n
n
yy
xx

, 0 , 0 0 , 0( / ) ( / ) ,
( 1,2, , ; 1,2, , )
h h v v
i j i j i j
y x
C d d C d d
i m j m
5 4 3 2
5 4 3 2 1
0
1 1 5 51, 0 1
4 2 8 3
1 1 5 5 2( ) 5 4 , 1 2,
12 2 8 3 3
0, 2
r r r r r
C r r r r r r r r
r
The elements of filter matrix ρxy (similar for ρyy):
where the filtering function C0 is defined as (Gaspari
and Cohn, 1999)
and respectively represent the horizontal and
vertical distances between the i-th and j-th row vectors;
and are the horizontal and vertical Schür radius.
h
jid ,v
jid ,
hd0
vd0

Issues caused by Localization
After localization, huge computing time is required
for the solution:
obs
TTyrrρOrbρx yyxy 1)) ( )( (
Before localization, it is easy to get the solution:
yx mm
510~ym
710~xm
)10~( 2nnmx
nmy yy mm diagonal
obs
TT
obs
TyrrOrbyROrbx 11 ) ( ) (

The extra multiplications
due to localization
1410~lnmmnmm yyyx
Available solution to the issue
1) To split the observation vector into a combination
of low-dimension sub-vectors
2) To sequentially assimilate the low-dimension
observation sub-vectors

Our new method is to split filter matrix in localization
N
k
Tkk
1
)()(
yxxy ρρρ
N
k
Tkk
1
)()(
yyyy ρρρ
Filter m
atrices
my-dimension filter eigenvector
mx-dimension filter eigenvector
N is the number of the major modes of the filter matrix

1
2121 )()(),(n
nnn xexeaxxC
mn
mndxxexexw
L
mn if0
if1 )( )( )(
0
21210 0
2121 )( )( ),()()( dxdxxexexxCxwxwa nn
L L
n
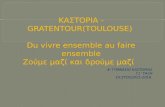
Expansion of filter function in localization
Filter function: Base function
Weighting function
Orth
ogo
nal

N=10
N=20 N=15
)( )(),( 0
1
0 xexeaxxC n
N
n
nnN
Green:
Black: )(0 rC
5 ,49 ,/ 0000 dxdxxrwhere
x
C
One-Dimension Filter

x
y
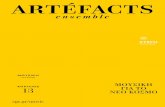
N=10 N=15
N=20 True:
)( )( )( )(),;,( 0
1 1
0,00 yeyexexeayyxxC mm
N
n
N
m
nnmnN
Two-Dimension Filter
)(0 rC
5 ,49 ,49 ,/ 0000
2
0
2
0 dyxdyyxxr

) , , ,
, , , ,
, , , ,(1~
1
21
2
2
2
1
2
1
2
1
1
1
xxρxxρxxρ
xxρxxρxxρ
xxρxxρxxρb
)(
x
)(
x
)(
x
)(
x
)(
x
)(
x
)(
x
)(
x
)(
x
n
NNN
n
nn
N
k
n
i
i
k
n 1 1
)(
~1
xρx x )~( Nnn
obs
TT
nn yOrrOrIbx
111~~
~)~~( ~
EnKF with extended samples
where

N
k
n
i
i
k
n 1 1
)(
~1
yρy y
) , , ,
, , , ,
, , , ,(1~
1
21
2
2
2
1
2
1
2
1
1
1
yyρyyρyyρ
yyρyyρyyρ
yyρyyρyyρr
)(
y
)(
y
)(
y
)(
y
)(
y
)(
y
)(
y
)(
y
)(
y
n
NNN
n
nn
)~( Nnn

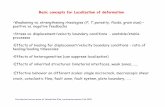
Solution scheme: 4th -order Runge-Kutta scheme
Time stepsize: 0.05 time unit
Periodic boundary conditions:
Note: 0.05 time unit ~6h (Lorenz and Emanuel, 1998)
FXXXXdt
dXjjjj
j 121 )(
jj XX 40
)40( , ,1 MMj Spatial coordinate:
Experiment with simple model
8F Forcing parameter:
Lorenz-96 model:

Red: EnKF with 10 sample (with localization) Blue: EnKF with 500 sample (without localization)
Step of assimilation cycle
RM
SE

Experiment based on an operational prediction model: AREM
H
CTRL: No assimilation with prediction as IC
ERA:Using ERA40 as IC, no assimilation
AIRS:Assimilating T & Q of AIRS only
TEMP: Assimilating Radiosondes only
AIRS+TEMP: With random perturbation
AIRS+TEMP—2: No random perturbation
RMSEs averaged from 850hPa to 100hPa

T
V U
Q

Summary
Localization for EnKF can be economically implemented using an orthogonal expansion of filter function;
The new implementation can be applied to other ensemble-based DA, e.g., En-3DVar and En-4DVar.

Comments, please.
Thank you!

Observations of all model variables: “true” states
plus uncorrelated random noise with standard
Gaussian distribution (with zero mean and
variance of 0.16)
“True” states: simulations during a period of time
unit after a long-term integration (e.g., 105 model
time steps) of the model from an arbitrary IC .
Assimilation experiments: assimilation cycles
over a period of 200 days using the EnKF with
18-hr assimilation window and, respectively.
500 samples are used for the experiments so that
they have good representativeness.