Experimental study of LTE signals as illuminators of opportunity for passive bistatic radar...
2
Click here to load reader
Transcript of Experimental study of LTE signals as illuminators of opportunity for passive bistatic radar...

Experimental study of LTE signals asilluminators of opportunity for passivebistatic radar applications
A.A. Salah, R.S.A. Raja Abdullah, A. Ismail, F. Hashim andN.H. Abdul Aziz
ELECT
Passive radars utilising illuminators of opportunity are being activelystudied in the field of radar. In the last few years, many illuminatorsources have been employed for passive radar applications.However, there have been no published results on the use of thelong-term evolution (LTE) signal as a novel source for passive radarapplications. For the first time an experimental investigation into thefeasibility of LTE-based passive radars for detecting a moving targetis presented. A theoretical analysis was conducted on a capturedLTE signal in the atmosphere. This was then followed by a field experi-ment. The preliminary results show that the LTE signal is capable ofbeing an illuminator for passive radars.
Introduction: A passive radar system is made up of a receiver without acolocated transmitter. It is much better than a conventional radar systemin many ways. For example, it is practically invisible to surveillance, it iseasily transported due to its smaller size and it is cheaper as it does nottransmit a signal [1–3]. Of late, the use of illuminators of opportunity bypassive radar systems has gained the interest of radar enthusiasts. As aresult, the illuminators have been employed in such things as television[4], FM radio [1], digital video broadcasting (DVB) [5], digital audiobroadcasting (DAB) [5], satellites [6], wireless fidelity (WiFi) [7],global systems for mobile communications (GSM) in cellular phones[3, 8] and worldwide interoperability for microwave access (WiMAX)[2, 9]. However, the use of long-term evolution (LTE) as an illuminatorof opportunity for passive radars still remains a broad area of researchand poses unique challenges.
LTE is a new wireless communication technology that offers last milebroadband wireless access with predictable extensive accessibility. Theremarkable characteristics that are integral to the LTE signal and whichencourage the utilisation of the LTE for passive radar are the broadbandwidth and the extent of the carrier frequency band. The allocatedbandwidth is from 1.4 to 20 MHz and it adds to a high range resolutionin comparison to the GSM and other signals. The extensive service fre-quency band range of 800–3500 MHz [10, 11] permits a definiteincreasing coverage of LTE signals in national and internationalregions, thus making it possible to have a passive radar configuration.Furthermore, the LTE employs orthogonal frequency division multipleaccess (OFDMA) that promises low sidelobes of the ambiguity function[2]. Certainly, the characteristics mentioned make the LTE signal attrac-tive for use in passive radar systems.
The objective of this Letter is to evaluate the potential of LTE-basedpassive radars for the detection of a moving target. The evaluation wascarried out on a real LTE signal on air. Parameters, such as the range andDoppler resolution, together with the signal ambiguities of the LTE arepresented, followed by the experimental results for the moving objectdetection and tracking on the assumption that this is the first time thatthe results are being evaluated and published.
LTE signal waveform and ambiguity function analysis: In this Letter, anactual transmitted LTE signal was used and measured. The standardmeasured LTE signal bandwidth is 10 MHz with a central frequencyof 2.635 GHz and an adopted sampling rate of 25 MS/s. Thus, forLTE-based passive radars, a range resolution of 15 m and a velocityresolution of 0.284 m/s are obtained through the use of a coherentintegration tone (CIT) of 0.2 s.
Based on the LTE physical layer standard, the downlink transmissionsare grouped into frames with a duration of 10 ms each, with each framebeing divided into 10 subframes with a duration of 1 ms each. Inaddition, two slots share the duration of the subframe equally. Theslots are comprised of either 6 or 7 OFDM symbols, according towhether the normal or the extended cyclic prefix is used [10]. Thesedata are fed into the ambiguity function (AF) in order to analysethe Doppler and range ambiguities of the LTE signal. The AF isformulated as
x(t, f ) =∫1−1
s(t)s(t − t)e−j2pfd tdt (1)
RONICS LETTERS 27th March 2014 Vol. 50
where χ(τ, f ) is the ambiguity response of the transmitted signal s(t) atdelay τ, and Doppler shift fd,. The AF is performed by using (1) on theearlier measured LTE signal in the atmosphere. The integration time istaken as a CIT of 0.2 s, corresponding to 20 frames.
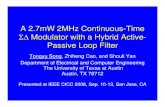
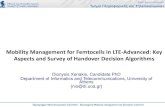
The zero range cut of the ambiguity function is shown in Fig. 1. As aresult, the Doppler ambiguity peaks, which are caused by the redundantdata that are sent out at every slot (0.5 ms), emerge every 2 km. The zeroDoppler cut of the ambiguity function can be seen in Fig. 2. Luckily, thenearest ambiguity peak range appears after 3000 km, corresponding tothe frame duration of 10 ms, which is beyond the range of the LTEe-node base station (eNB) coverage area.
0
–10
–20
–30
–40
–50
–60
–70
–80
–90
–100–6 –4 –2 0
Doppler, kHzno
rmal
ised
am
bigu
ity fu
nctio
n, d
B
2 4 6
Fig. 1 Zero range cut of ambiguity function
0
–20
–40
–60
–80
–100
–120
–140
–160
–180
–9000 –6000 –3000 0range, km
norm
alis
ed a
bsol
ute
leve
l, dB
3000 6000 9000
Fig. 2 Zero Doppler cut of ambiguity function
passive radar direct pathantenna
120ºtarget echoantenna
V
b
1.57 km
LTE eNB
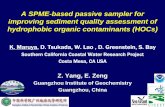
Fig. 3 Geometrical configuration for moving car measurements
The analyses of the Doppler and range resolutions as well as those ofthe Doppler and range ambiguities encourage the use of the LTE signalas a new illuminator of a passive radar. The high Doppler and rangeresolutions clarify this statement. Furthermore, the Doppler and rangeambiguities are beyond the network coverage of the standard LTEdeployment.
Experimental results for moving target detection: A field experimentwas performed for the LTE-based passive radar using a chosen oper-ational LTE eNB. The objective of the experiment was the detectionof a moving car. Fig. 3 illustrates the setup for the experiment and thegeometrical configuration of the area. A receiver was constructed withtwo parallel channels, with one channel being assigned to receive the
No. 7 pp. 545–547

direct signal from the LTE eNB at a distance of 1.6 km from the antenna,and the other channel being used to receive the target echo signal that isscattered from the moving car. Each channel of the receiver comprised ahorn antenna with components for signal amplification and band selec-tion, together with a downconverter and storage for offline processing.
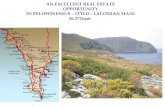
The coherent integration time was 0.2 s, corresponding to 5Msamples. A cross-coherent correlation was applied to the receivedsignals to produce the Doppler-range graph. The results of theDoppler-range map tracking of a moving car on the open road are pre-sented in Fig. 4. The detection results for the first, the sixth, the eighthand the tenth range cells are shown in Figs. 4a–d, respectively. All fourfigures indicate that the constantly high amplitude that emerges at the0 Hz Doppler (DC) components is caused by the reflection of thereceived signal from the stationary building near the experimental areaand leakage from the direct signal.
100
80
60
40
20
0
100
80
60
40
20
0
100
80
60
40
20
0–200 –100 0 100 200 –200 –100 0 100 200
–200 –100 0Doppler, Hz
a b
c d
Doppler, Hz
Doppler, Hz Doppler, Hz
rang
e, m
rang
e, m
rang
e, m
rang
e, m
100 200 –200 –100 0 100 200
100
80
60
40
20
0
Fig. 4 Range-Doppler tracking result for moving car
a First range cellb Sixth range cellc Eighth range celld Tenth range cell
As shown in Fig. 4a, the ground truth for the detection of the movingcar is a car coming from a distance of roughly 48 m from the antenna. Itshould also be noted that the car is moving in the direction of the recei-ver antenna until it arrives at a distance of 12 m, as can be seen inFig. 4d. The peak strength is proportional to the amount of the signalthat is reflected to the antenna, which can be clearly seen in Figs. 4band c. It is assumed that the car has a large radar cross-section duringthis time. At the same time, it is crucial to point out here that thespeed of the car was kept constant at ∼30 km/h and the linearity inthe Doppler frequency was due to the shifting of the bistatic angle.
ELECTRONICS LETTERS
Conclusion: The positive results obtained from the theoretical analysisin addition to the experimental results indicate that LTE-based passiveradar is highly capable of detecting and tracking a moving object,such as a vehicle. The LTE broadband features and its range of frequen-cies can offer a minimum range resolution of 15 m and a minimumvelocity resolution of 0.284 m/s for a CIT of 0.2 s. As such, the LTEsignal is useful for both range and velocity detection. Furthermore,the LTE is highly regarded both locally and globally for its extensiveaccessibility, thus making it a potentially new illuminator of opportunityfor passive radar systems in the future. Nevertheless, despite the favour-able results presented in this Letter, it is necessary to conduct furtherinvestigations into more experimental settings and signal systems inorder to reinforce the capability of the LTE as a new illuminator ofopportunity for passive radar applications.
© The Institution of Engineering and Technology 201419 January 2014doi: 10.1049/el.2014.0237One or more of the Figures in this Letter are available in colour online.
A.A. Salah, R.S.A. Raja Abdullah, A. Ismail, F. Hashim and N.H.Abdul Aziz (Wireless and Photonic Network Research Center,Faculty of Engineering, Universiti Putra Malaysia, 43400 Selangor,Malaysia)
E-mail: [email protected]
References
1 Howland, P.E., Maksimiuk, D., and Reitsma, G.: ‘FM radio basedbistatic radar’, IEE Proc. Radar Sonar Navig., 2005, 152, pp. 107–115
2 Wang, Q., Hou, C., and Lu, Y.: ‘An experimental study ofWiMAX-based passive radar’, IEEE Trans. Microw. Theory Tech.,2010, 58, pp. 3502–3510
3 Tan, D., Sun, H.-b., Lu, Y.-l., Lesturgie, M., and Chan, H.: ‘Passiveradar using global system for mobile communication signal: theory,implementation and measurements’, IEE Proc. Radar, Sonar andNavigation, 2005, 152, (3), pp. 116–123
4 Griffiths, H., and Long, N.: ‘Television-based bistatic radar’, IEE Proc.Communications, Radar and Signal Processing, 1986, 133, (7),pp. 649–657
5 Poullin, D.: ‘Passive detection using digital broadcasters (DAB, DVB)with COFDM modulation’, IEE Proc. Radar, Sonar and Navigation,2005, 152, (3), pp. 143–152
6 Griffiths, H., Garnett, A., Baker, C., and Keaveney, S.: ‘Bistatic radarusing satellite-borne illuminators of opportunity’. Presented at Int.Conf. Radar’92, Brighton, UK, October 1992, pp. 276–279
7 Guo, H., Woodbridge, K., and Baker, C.: ‘Evaluation of WiFi beacontransmissions for wireless based passive radar’. Presented at IEEERadar Conference, 2008. RADAR’08, Rome, Italy, May 2008, pp. 1–6
8 Sun, H., Tan, D.K., and Lu, Y.: ‘Aircraft target measurements using aGSM-based passive radar’. Presented at IEEE Radar Conf. 2008.RADAR’08, Rome, Italy, May 2008, pp. 26–30
9 Wang, Q., Lu, Y.L., and Hou, C.P.: ‘Evaluation of WiMAXtransmissions for passive radar applications’, Microw. Opt. Technol.Lett., 2010, 52, pp. 1507–1509
10 Ahmadi, S.: ‘An overview of 3GPP long-term evolution radio accessnetwork’, in Tarokh, V. (Ed.) ‘New Directions in WirelessCommunications Research’ (Springer, New York, 2009), pp. 431–465
11 Chadchan, S., and Akki, C.: ‘3gpp lte/sae: an overview’, Int. J. Comput.Electr. Eng., 2010, 2, pp. 806–814
27th March 2014 Vol. 50 No. 7 pp. 545–547