EXERCICES ET PROBLÈMES COMPLÉMENTAIRES CHAPITRE...
18
EXERCICES ET PROBLÈMES COMPLÉMENTAIRES CHAPITRE 7 P7– 1. Pendule simple dans différents référentiels y H O z g A θ FIG. 7.1. Un pendule simple est formé d’un fil inextensible, de longueur l , dont une extrémité porte une masselotte A , de masse m , et l’autre H est fixée au bâti lié à un référentiel R. Ce référentiel est rapporté à une origine O et à une base orthonormée directe (e x , e y , e z ), e z étant vertical ascendant (Fig. 7.1). Dans le plan ver- tical du mouvement Oyz , la position de A est caractérisée par le paramètre angulaire u =(−e z , HA). On note g = −g e z , avec g = 9, 81 m . s −2 , le champ de pesanteur terrestre. 1. Pendule simple dans un référentiel terrestre R = R 1 a) Exprimer, en fonction de u et de ses dérivées, l’énergie cinétique de A. b) Trouver , en fonction de u , l’expression de l’énergie potentielle de pesanteur E p . On prendra comme origine sa valeur à u = 0. c) En déduire l’équation différentielle du mouvement en u. d) Discuter, à partir du graphe E p (u), la nature du mouvement suivant les valeurs de l’énergie mécanique E m . e) Étudier le cas des petits mouvements. Quelle est leur période T 1 ? Application numérique : l = 1m. 2. Le référentiel R = R 2 par rapport auquel on étudie le mouvement du pendule a un mouvement de translation, rectiligne et uniforme par rapport à R 1 , suivant l’axe des y. a) Établir l’équation différentielle du mouvement en u à partir du théorème du moment cinétique appliqué en H dans R 2 . b) Comparer la période T 2 des petites oscillations du pendule dans R 2 à T 1 . Pouvez-vous justifier sans calcul le résultat obtenu ? 3. Le référentiel R = R 3 par rapport auquel on étudie le mouvement du pendule à un mouvement de translation d’accélération a 3 par rapport à R 1 . a) Établir le bilan des forces qui s’exercent sur A dans R 3 . En déduire que , dans ce référentiel, tout se passe comme si l’on pouvait remplacer le champ de pesanteur g par un champ de pesanteur apparent g a que l’on exprimera en fonction de g et a 3 . b) Que se passe-t-il pour a 3 = g ? Ce cas présente un intérêt en astronautique. Savez-vous com- ment on le réalise dans un avion ? c) L’accélération a 3 est dirigée suivant l’axe horizontal Oy et sa norme est g/2: a 3 =(g/2)e y . Montrer que l’énergie de potentielle apparente s’écrit, en adoptant comme origine sa valeur à u = 0: E a p = C 1 − cos u + 1 2 sin u C étant une constante dont on donnera la dimension physique et que l’on déterminera en fonction de m, g et l. Trouver, à partir de la fonction E a p (u), la position d’équilibre stable u e du pendule. Calculer u e . ©Dunod, Paris, 2014
Transcript of EXERCICES ET PROBLÈMES COMPLÉMENTAIRES CHAPITRE...
EXERCICES ET PROBLÈMES COMPLÉMENTAIRES
CHAPITRE 7
P7– 1. Pendule simple dans différents référentiels
y
H
O
z
g
A
�
θ
FIG. 7.1.
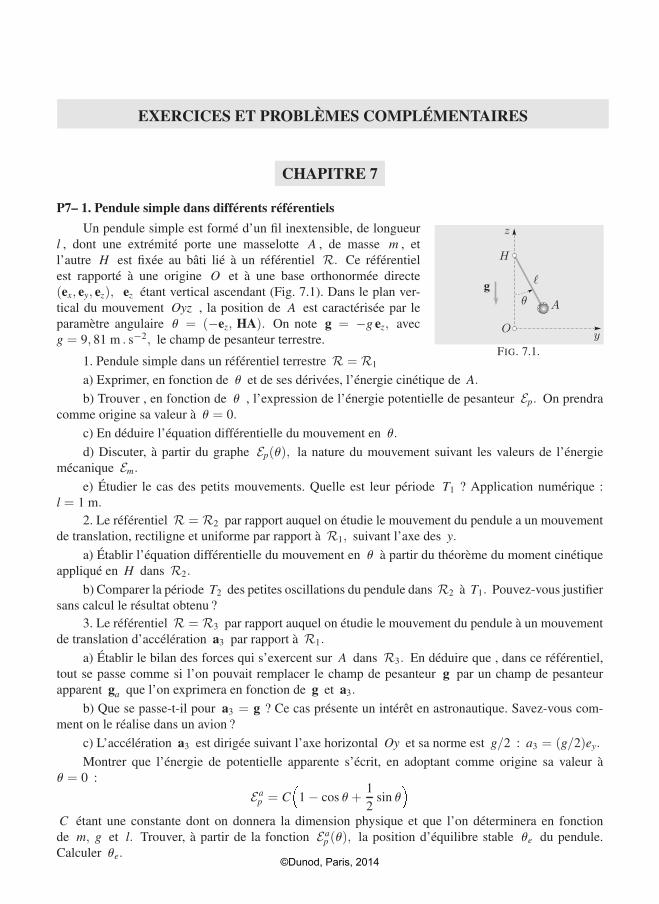
Un pendule simple est formé d’un fil inextensible, de longueurl , dont une extrémité porte une masselotte A , de masse m , etl’autre H est fixée au bâti lié à un référentiel R. Ce référentielest rapporté à une origine O et à une base orthonormée directe(ex, ey, ez), ez étant vertical ascendant (Fig. 7.1). Dans le plan ver-tical du mouvement Oyz , la position de A est caractérisée par leparamètre angulaire u = (−ez, HA). On note g = −g ez, avecg = 9, 81 m . s−2, le champ de pesanteur terrestre.
1. Pendule simple dans un référentiel terrestre R = R1
a) Exprimer, en fonction de u et de ses dérivées, l’énergie cinétique de A.
b) Trouver , en fonction de u , l’expression de l’énergie potentielle de pesanteur Ep. On prendracomme origine sa valeur à u = 0.
c) En déduire l’équation différentielle du mouvement en u.
d) Discuter, à partir du graphe Ep(u), la nature du mouvement suivant les valeurs de l’énergiemécanique Em.
e) Étudier le cas des petits mouvements. Quelle est leur période T1 ? Application numérique :l = 1 m.
2. Le référentiel R = R2 par rapport auquel on étudie le mouvement du pendule a un mouvementde translation, rectiligne et uniforme par rapport à R1, suivant l’axe des y.
a) Établir l’équation différentielle du mouvement en u à partir du théorème du moment cinétiqueappliqué en H dans R2.
b) Comparer la période T2 des petites oscillations du pendule dans R2 à T1. Pouvez-vous justifiersans calcul le résultat obtenu ?
3. Le référentiel R = R3 par rapport auquel on étudie le mouvement du pendule à un mouvementde translation d’accélération a3 par rapport à R1.
a) Établir le bilan des forces qui s’exercent sur A dans R3. En déduire que , dans ce référentiel,tout se passe comme si l’on pouvait remplacer le champ de pesanteur g par un champ de pesanteurapparent ga que l’on exprimera en fonction de g et a3.
b) Que se passe-t-il pour a3 = g ? Ce cas présente un intérêt en astronautique. Savez-vous com-ment on le réalise dans un avion ?
c) L’accélération a3 est dirigée suivant l’axe horizontal Oy et sa norme est g/2 : a3 = (g/2)ey.
Montrer que l’énergie de potentielle apparente s’écrit, en adoptant comme origine sa valeur àu = 0 :
Eap = C
�1 − cos u +
12
sin u�
C étant une constante dont on donnera la dimension physique et que l’on déterminera en fonctionde m, g et l. Trouver, à partir de la fonction Ea
p (u), la position d’équilibre stable ue du pendule.Calculer ue. ©Dunod, Paris, 2014

2 Mécanique, 7e édition
En développant l’énergie potentielle Eap autour de la position d’équilibre u = ue, établir l’ex-
pression de la période T3 des petites oscillations en fonction de l , g et cos ue. Ce résultat peut êtreobtenu très rapidement à partir de la norme du champ de pesanteur apparent. Comment ? Calculer T3.
CHAPITRE 9
P9– 1. Exemple simple de bifurcation en mécanique
Une masselotte A, de masse m, évolue sans frottement sur un guide circulaire G, vertical, decentre O et de rayon r. Le contact se maintient au cours du mouvement : concrètement, A peutêtre représenté par une perle enfilée sur G. Ce guide est astreint à tourner uniformément, à la vitesseangulaire V = V ez (V > 0), autour de son diamètre BH (Fig. 9.6a). Ce dernier est dirigé suivantl’axe vertical descendant Ox d’un référentiel terrestre R supposé galiléen. On caractérise la positionde A sur G par le paramètre angulaire u = (OB, OA).
1. Trouver les positions d’équilibre de A dans R′. Que peut-on dire de la stabilité de ces positionsd’équilibre ?
2. Tracer le graphe donnant la position d’équilibre stable ue �= 0 en fonction de V. On préciserales valeurs de la pente d ue/ d V pour V = Vc et V � Vc avec Vc = (g/r)1/2. Le point Bcorrespondant à V = Vc est appelé point de bifurcation. Quelles sont les positions d’équilibre stablepour V = Vc/
√2 et pour V = Vc
√2.
CHAPITRE 12
P12– 1. Attraction d’un corps par la Terre
Un corps ponctuel A de masse m , initialement au repos à une distance r0 du centre de la Terre, semet en mouvement sous l’action de la gravitation. On assimile la Terre à une boule sphérique de masseMT et de rayon RT .
1. a) En supposant le champ de gravitation uniforme et égal à sa valeur à la surface de la Terre,calculer la durée que mettrait A pour atteindre la surface de la Terre dans le cas où r0 = 384 000 km .
b) Quelle serait la valeur de r0 pour t = 9 jours.
2. Le champ de gravitation n’est pas uniforme, mais varie avec r selon une loi newtonienne.
a) Établir la relation suivante entre t et r0 , si r0 � RT :
t2
r30
=p2
8GMT
Commenter ce résultat, en le comparant à la troisième loi de Kepler. On donne pour x0 � 1 :� ∞
1
�x
x0 − x
�1/2
d x = x0
�arctan u − 2u
1 + u2
�∞
0avec u =
�x
x0 − x
�1/2
b) Calculer la nouvelle valeur de r0 pour t = 9 jours.
c) Quelle serait la durée de chute de la Lune immobilisée et tombant sur la Terre, sachant que ladistance Terre-Lune est prise égale à 384 000 km ?
©Dunod, Paris, 2014
Mécanique, 7e édition 3
3. Transposer le résultat précédent à l’atome de Bohr en calculant la durée que mettrait l’électronde l’atome d’hydrogène pour atteindre le proton, si on pouvait l’immobiliser.
CHAPITRE 13
P13– 1. Satellite en interaction avec la Terre et la Lune
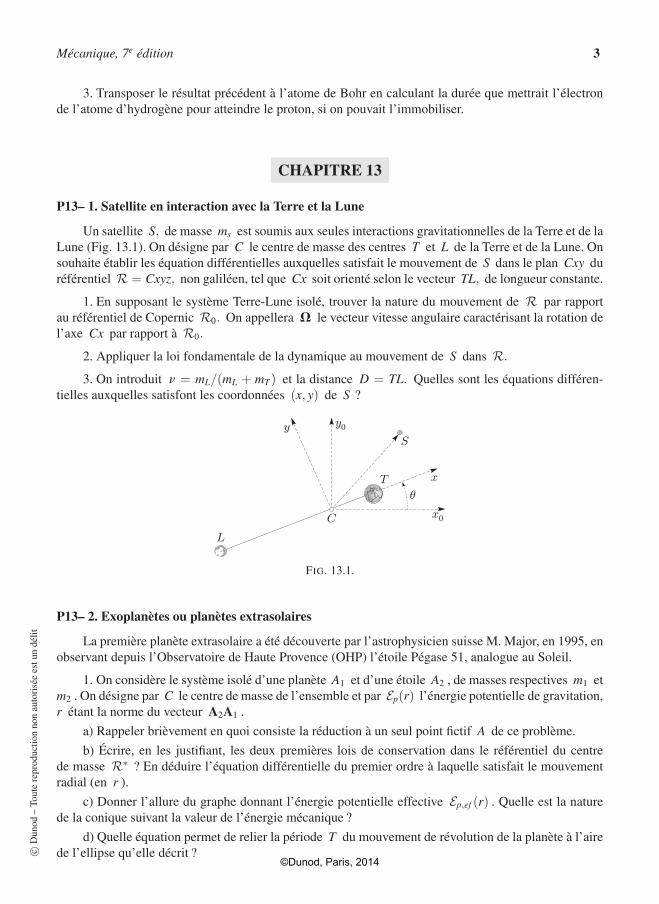
Un satellite S, de masse ms est soumis aux seules interactions gravitationnelles de la Terre et de laLune (Fig. 13.1). On désigne par C le centre de masse des centres T et L de la Terre et de la Lune. Onsouhaite établir les équation différentielles auxquelles satisfait le mouvement de S dans le plan Cxy duréférentiel R = Cxyz, non galiléen, tel que Cx soit orienté selon le vecteur TL, de longueur constante.
1. En supposant le système Terre-Lune isolé, trouver la nature du mouvement de R par rapportau référentiel de Copernic R0. On appellera V le vecteur vitesse angulaire caractérisant la rotation del’axe Cx par rapport à R0.
2. Appliquer la loi fondamentale de la dynamique au mouvement de S dans R.
3. On introduit n = mL/(mL + mT) et la distance D = TL. Quelles sont les équations différen-tielles auxquelles satisfont les coordonnées (x, y) de S ?
L
T
S
C
θ
x
y
x0
y0
FIG. 13.1.
P13– 2. Exoplanètes ou planètes extrasolaires
La première planète extrasolaire a été découverte par l’astrophysicien suisse M. Major, en 1995, enobservant depuis l’Observatoire de Haute Provence (OHP) l’étoile Pégase 51, analogue au Soleil.
1. On considère le système isolé d’une planète A1 et d’une étoile A2 , de masses respectives m1 etm2 . On désigne par C le centre de masse de l’ensemble et par Ep(r) l’énergie potentielle de gravitation,r étant la norme du vecteur A2A1 .
a) Rappeler brièvement en quoi consiste la réduction à un seul point fictif A de ce problème.
b) Écrire, en les justifiant, les deux premières lois de conservation dans le référentiel du centrede masse R∗ ? En déduire l’équation différentielle du premier ordre à laquelle satisfait le mouvementradial (en r ).
c) Donner l’allure du graphe donnant l’énergie potentielle effective Ep,ef (r) . Quelle est la naturede la conique suivant la valeur de l’énergie mécanique ?
d) Quelle équation permet de relier la période T du mouvement de révolution de la planète à l’airede l’ellipse qu’elle décrit ?c ©D
unod
–To
ute
repr
oduc
tion
non
auto
risé
ees
tun
délit
©Dunod, Paris, 2014

4 Mécanique, 7e édition
e) Établir la relation suivante entre le carré de la période et le cube du demi-grand axe de l’ellipse :
T2
a3=
4p2
G(m1 + m2)
Pour cela, on utilisera l’expression pab de l’aire de l’ellipse décrite, ainsi que les deux expressions duparamètre de la conique p = b2/a et p = L2/(m|K|) , a , b , L , m et K étant des quantités dont onprécisera la signification.
f) Déterminer, à l’aide de la relation précédente, appliquée aux deux couples Soleil-Terre et Soleil-Jupiter, la distance qui sépare les centres du Soleil et de Jupiter, en unité astronomique (UA).
2. La trajectoire de A est circulaire.
a) Établir les expressions suivantes des rayons r∗1 et r∗2 des trajectoires de A1 et A2 dans leréférentiel du centre de masse R∗ , en fonction des masses et de la période de révolution :
r∗1 = a
�G(m1 + m2)
4p2T21/3
et r∗2 = (1 − a)�
G(m1 + m2)4p2
T21/3
a étant un facteur que l’on exprimera en fonction du rapport des deux masses.
b) En déduire les expressions suivantes des vitesses v∗1 et v∗2 de A1 et A2 sur leurs trajectoires :
v∗1 = av∗ et v∗2 = (1 − a)v∗ avec v∗ =
�2pG(m1 + m2)
T
1/3
c) Dans le cas où m1 = m2/3 , représenter dans R∗ , à un instant donné, les points A , A1 , A2 ,avec leurs vitesses respectives v∗ , v∗1 et v∗
2 .
d) Calculer les rayons de ces trajectoires, ainsi que leurs vitesses, dans le couple Soleil-Jupiter.
3. Le flux lumineux issu d’une étoile rend difficile l’observation directe d’une éventuelle planètequi graviterait autour d’elle. Aussi la période de révolution T est-elle déterminée à partir du déplace-ment de cette étoile dans R∗ . On suppose que l’orbite de l’exo-planète, de masse mp , autour de sonétoile, de masse ms , avec mp � ms , est circulaire.
a) Donner une expression approchée du rayon r∗p de l’orbite de la planète dans R∗ , en fonctionde ms et T . Application pour ms = 1, 1 MS et T = 3, 52 jours.
b) Établir la relation entre r∗p , le rayon r∗s de l’orbite de l’étoile dans R∗ et les masses. Endéduire mp sachant que le suivi, au cours du temps, de la position de l’étoile dans le ciel, a donné lavaleur absolue suivante de r∗s : 3, 8 × 106 m .
On consultera le tableau des constantes du système solaire.
P13– 3. Impact d’un astéroïde sur une planète du système solaire
Un astéroïde assimilé à un corpuscule A , de masse m , s’approche d’une planète, de centre P ,de masse M , avec une vitesse vi par rapport au référentiel R , d’origine P et dont les axes sontparallèles à ceux du référentiel de Copernic. Sur la figure 13.2, vi est la vitesse de A lorsque ce dernierest infiniment éloigné de P . L’influence du Soleil et des autres planètes est négligeable. En outre, lerapport des masses m/M est très inférieur à l’unité, de telle sorte que ce problème à deux corps peut seramener à celui de A dans R .
1. a) Pourquoi le mouvement de A dans le voisinage de la planète est-il plan ?©Dunod, Paris, 2014

Mécanique, 7e édition 5
B
PlanèteO P x
bw
FIG. 13.2.
b) Exprimer, en la justifiant, la loi de conservation du moment cinétique en fonction de m , vi etdu paramètre d’impact bi , distance de P à la direction de vi .
2. a) Quelle est, en fonction de la distance r = PA , l’expression de l’énergie potentielle de gravi-tation entre A et P ? On prendra comme origine la position initiale de A infiniment éloigné de P .
b) Exprimer, en la justifiant, la loi de conservation de l’énergie mécanique. En déduire une relationentre la vitesse v de A , sa vitesse initiale vi et r .
3. a) L’énergie de l’astéroïde étant suffisante, sa trajectoire est une hyperbole. Commenter qualita-tivement ce résultat.
b) On rappelle que, dans le problème à deux corps, l’équation polaire de la trajectroire conique dela particule fictive s’écrit :
r =p
1 + e cos(w − w0)avec p =
L2
m|K| et e =
1 +2EL2
mK2
�1/2
Donner la signification et le nom des différents termes utilisés. Quelle est la valeur de w0 ? Sachant quem/M � 1 , exprimer p et e en fonction de vi , bi et M .
c) Dans le système d’axes cartésiens OXY de la figure, l’équation de l’hyperbole précédente s’écritX2/a2 − Y2/b2 = 1 . La distance séparant les foyers symétriques des deux branches d’hyperbole vautalors 2c avec c2 = a2 + b2 . On donne les relations suivantes :
a =p
e2 − 1et c = ea =
pee2 − 1
En déduire b en fonction de p et e .
4. a) Exprimer la distance minimale rmin (péricentre) entre P et A , en fonction de p et de e .
b) Écrire l’équation polaire de la trajectoire, ainsi que les expressions de a , b et c , en fonctionde rmin et e .
c) En utilisant les propriétés du triangle rectangle PBO , montrer que bi s’identifie à b .
5. a) On introduit F = pb2i /(pR2) , appelé facteur de section efficace de la planète, R étant le
rayon de sa surface sphérique. Proposer une justification intuitive de l’intérêt d’un tel facteur.
b) Exprimer la conservation de l’énergie entre la position de A infiniment éloignée de P et celleau péricentre, dans le cas où l’astéroïde A frôle la surface de la planète. En déduire, en utilisant laconservation du moment cinétique, la relation suivante :
F = 1 +v2
l
v2i
dans laquelle vl est une quantité caractéristique de la planète que l’on exprimera en fonction de Met R .c ©D
unod
–To
ute
repr
oduc
tion
non
auto
risé
ees
tun
délit
©Dunod, Paris, 2014
6 Mécanique, 7e édition
c) Calculer vl et F pour les huit � planètes du système solaire, dans le cas où vi = 10 km.s−1 :
Mercure, Vénus, Terre, Mars, Jupiter, Saturne, Uranus et Neptune
On consultera le tableau des constantes du système solaire.
CHAPITRE 18
P18– 1. Mouvement d’une tige en contact sans frottement sur une marche d’escalier
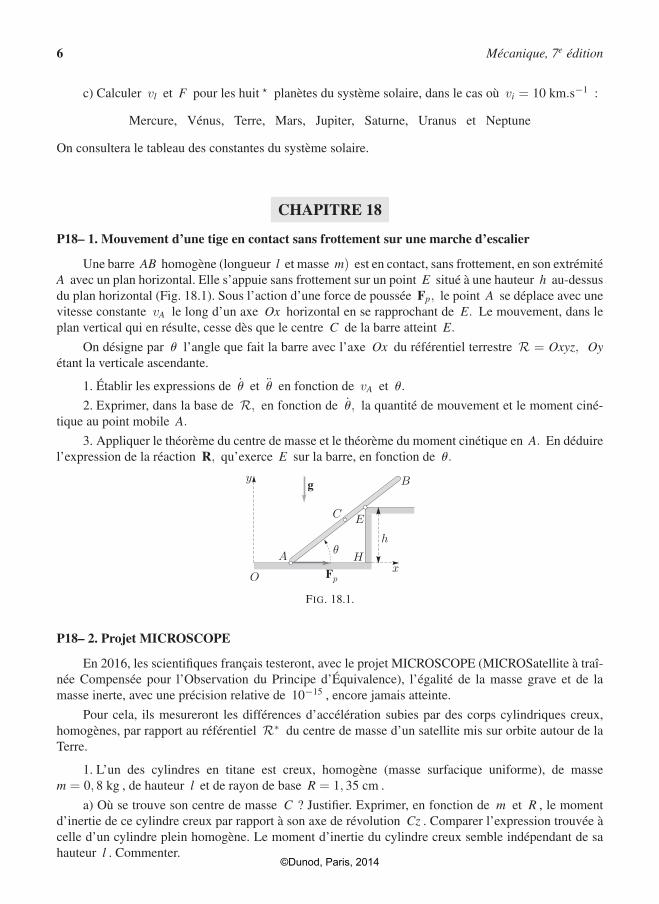
Une barre AB homogène (longueur l et masse m) est en contact, sans frottement, en son extrémitéA avec un plan horizontal. Elle s’appuie sans frottement sur un point E situé à une hauteur h au-dessusdu plan horizontal (Fig. 18.1). Sous l’action d’une force de poussée Fp, le point A se déplace avec unevitesse constante vA le long d’un axe Ox horizontal en se rapprochant de E. Le mouvement, dans leplan vertical qui en résulte, cesse dès que le centre C de la barre atteint E.
On désigne par u l’angle que fait la barre avec l’axe Ox du référentiel terrestre R = Oxyz, Oyétant la verticale ascendante.
1. Établir les expressions de u et u en fonction de vA et u.
2. Exprimer, dans la base de R, en fonction de u, la quantité de mouvement et le moment ciné-tique au point mobile A.
3. Appliquer le théorème du centre de masse et le théorème du moment cinétique en A. En déduirel’expression de la réaction R, qu’exerce E sur la barre, en fonction de u.
g
Fp
y
xO
θ
EC
HA
B
h
FIG. 18.1.
P18– 2. Projet MICROSCOPE
En 2016, les scientifiques français testeront, avec le projet MICROSCOPE (MICROSatellite à traî-née Compensée pour l’Observation du Principe d’Équivalence), l’égalité de la masse grave et de lamasse inerte, avec une précision relative de 10−15 , encore jamais atteinte.
Pour cela, ils mesureront les différences d’accélération subies par des corps cylindriques creux,homogènes, par rapport au référentiel R∗ du centre de masse d’un satellite mis sur orbite autour de laTerre.
1. L’un des cylindres en titane est creux, homogène (masse surfacique uniforme), de massem = 0, 8 kg , de hauteur l et de rayon de base R = 1, 35 cm .
a) Où se trouve son centre de masse C ? Justifier. Exprimer, en fonction de m et R , le momentd’inertie de ce cylindre creux par rapport à son axe de révolution Cz . Comparer l’expression trouvée àcelle d’un cylindre plein homogène. Le moment d’inertie du cylindre creux semble indépendant de sahauteur l . Commenter.
©Dunod, Paris, 2014

Mécanique, 7e édition 7
b) Montrer que le moment d’inertie du cylindre par rapport à un axe transversal Cx peut se mettresous la forme :
ICx = nmR2 +ml2
12
n étant un facteur que l’on déterminera.
c) Quelle doit être la hauteur l pour que les deux moments d’inertie précédents soient égaux ?Calculer leur valeur commune en précisant l’unité SI.
2. Le satellite peut être assimilé à un parallélépipède rectangle, plein, de masse M = 120 kg . Soncentre de masse S décrit une trajectoire circulaire, à une altitude h = 700 km .
a) Appliquer le théorème du centre de masse au satellite par rapport au référentiel géocentriqueRg , d’origine le centre T de la Terre et d’axes définis par des étoiles éloignées.
En déduire, en fonction de la distance du satellite au centre de la Terre r = TS , la vitesse de S ,ainsi que le carré de la durée T de révolution de S autour de la Terre ? Ce résultat rappelle l’une deslois de Kepler. Laquelle ? Justifier.
Calculer la vitesse de S en km.s−1 .
b) Trouver, en fonction de r , la quantité de mouvement du satellite, le moment cinétique de soncentre de masse S ainsi que son énergie cinétique. Application numérique.
c) Rappeler la signification de chacun des termes qui figurent dans l’expression du vecteur deRunge-Lenz :
R = v × L + Ker
Quelle est la propriété essentielle de R ? Calculer sa valeur pour le satellite en orbite.
d) Quelle serait la vitesse d’évasion du satellite ? Calculer le rayon de Schwartzchild associé à laTerre. Commenter.
CHAPITRE 19
P19– 1. Mouvement d’un cylindre en contact extérieur avec un cylindre fixe
Un cylindre C est en contact extérieur avec un cylindre fixe C0 de rayon R et d’axe horizontalOz. Le référentiel R = Oxyz, dont l’origine O coïncide avec le centre de C0 et dont Oy est un axevertical ascendant, peut être considéré comme galiléen.
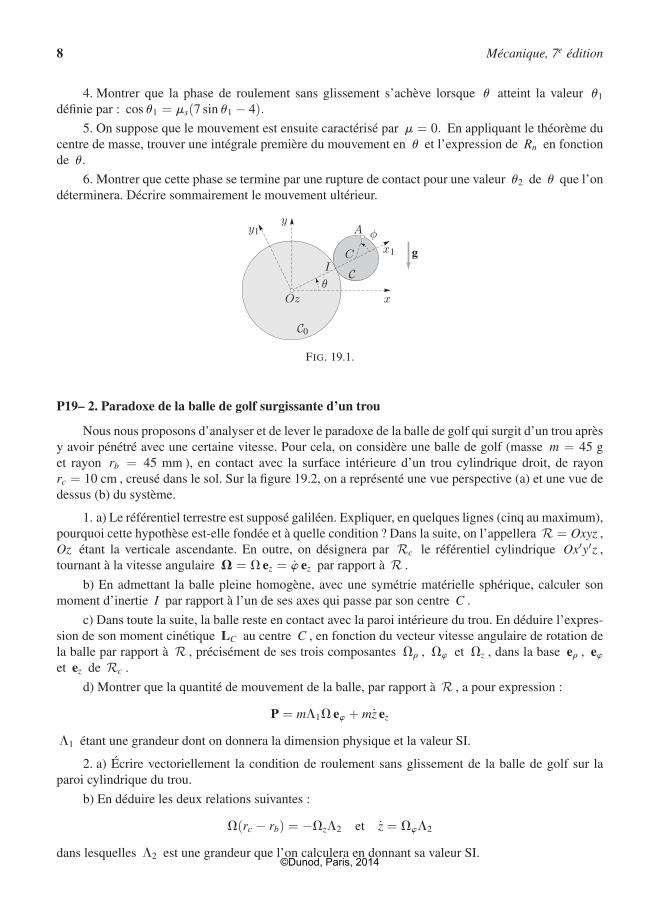
Le cylindre C, plein, homogène (masse m, rayon R, centre C) d’axe Cz est mobile au contactde C0 suivant l’une de ses génératrices Iz. Comme sur la figure 19.1 qui représente une section droitemédiane des deux cylindres, on notera A un point de la périphérie de C, u l’angle (Ox, OI) et f
l’angle (IC, CA). On désigne la réaction en I de C0 sur C par Rn ex1 + Rt ey1 , par m et ms lesfacteurs de frottement cinétique et statique.
Les conditions initiales sont : u légèrement inférieur à p/2, f = 0, u = 0, f = 0.
1. Déterminer la quantité de mouvement et le moment cinétique du cylindre C en C.
2. Dans la phase initiale du mouvement, on suppose qu’il y a roulement sans glissement. Écrire lacondition de roulement sans glissement. Que deviennent les éléments cinétiques calculés en 1 ?
3. En appliquant les théorèmes généraux de la mécanique en I, trouver une intégrale première demouvement et les expressions de Rt et Rn en fonction de u.c ©D
unod
–To
ute
repr
oduc
tion
non
auto
risé
ees
tun
délit
©Dunod, Paris, 2014
8 Mécanique, 7e édition
4. Montrer que la phase de roulement sans glissement s’achève lorsque u atteint la valeur u1
définie par : cos u1 = ms(7 sin u1 − 4).5. On suppose que le mouvement est ensuite caractérisé par m = 0. En appliquant le théorème du
centre de masse, trouver une intégrale première du mouvement en u et l’expression de Rn en fonctionde u.
6. Montrer que cette phase se termine par une rupture de contact pour une valeur u2 de u que l’ondéterminera. Décrire sommairement le mouvement ultérieur.
y1y
C0
x
x1
A
gC
C
Ozθ
φ
I
FIG. 19.1.
P19– 2. Paradoxe de la balle de golf surgissante d’un trou
Nous nous proposons d’analyser et de lever le paradoxe de la balle de golf qui surgit d’un trou aprèsy avoir pénétré avec une certaine vitesse. Pour cela, on considère une balle de golf (masse m = 45 get rayon rb = 45 mm ), en contact avec la surface intérieure d’un trou cylindrique droit, de rayonrc = 10 cm , creusé dans le sol. Sur la figure 19.2, on a représenté une vue perspective (a) et une vue dedessus (b) du système.
1. a) Le référentiel terrestre est supposé galiléen. Expliquer, en quelques lignes (cinq au maximum),pourquoi cette hypothèse est-elle fondée et à quelle condition ? Dans la suite, on l’appellera R = Oxyz ,Oz étant la verticale ascendante. En outre, on désignera par Rc le référentiel cylindrique Ox′y′z ,tournant à la vitesse angulaire V = V ez = w ez par rapport à R .
b) En admettant la balle pleine homogène, avec une symétrie matérielle sphérique, calculer sonmoment d’inertie I par rapport à l’un de ses axes qui passe par son centre C .
c) Dans toute la suite, la balle reste en contact avec la paroi intérieure du trou. En déduire l’expres-sion de son moment cinétique LC au centre C , en fonction du vecteur vitesse angulaire de rotation dela balle par rapport à R , précisément de ses trois composantes Vr , Vw et Vz , dans la base er , ew
et ez de Rc .
d) Montrer que la quantité de mouvement de la balle, par rapport à R , a pour expression :
P = mL1V ew + mz ez
L1 étant une grandeur dont on donnera la dimension physique et la valeur SI.
2. a) Écrire vectoriellement la condition de roulement sans glissement de la balle de golf sur laparoi cylindrique du trou.
b) En déduire les deux relations suivantes :
V(rc − rb) = −VzL2 et z = VwL2
dans lesquelles L2 est une grandeur que l’on calculera en donnant sa valeur SI.©Dunod, Paris, 2014

Mécanique, 7e édition 9
c) Montrer que la vitesse du point géométrique I de contact, par rapport à R , possède deuxcomposantes dans la base de Rc , la première selon la verticale et la seconde orthoradiale (orientéeselon ew ) :
vI = (L1 + L2)V ew + z ez
3. a) Comment est modifié le théorème du moment cinétique appliqué à la balle de golf, lorsquele point où on l’applique est mobile par rapport au référentiel considéré ? Cas où le point mobile est lecentre de masse de la balle.
b) Pourquoi est-il judicieux d’appliquer le théorème du moment cinétique au point géométrique decontact I ?
c) Calculer le moment du poids en I .
d) Quelles sont, en fonction de Vr , Vw , Vz , V et z , les composantes, dans la base de Rc , dumoment cinétique de la balle au point I ? En déduire, dans cette même base, (d LI/ d t)Rc par rapportau temps. Trouver alors les composantes, dans la base de Rc , du vecteur (d LI/ d t)R .
4. a) Montrer, à l’aide du théorème du moment cinétique, que Vr , Vw , Vz et V satisfont auxtrois équations différentielles suivantes :
Vr = VwV IVw + mzrb + IVrV = −mgrb IVz − mL1L2V = 0
b) En tenant compte de la condition de roulement sans glissement reliant V et Vz , établir que Vz
et V sont des constantes.
c) En déduire que la composante verticale z du centre de masse de la balle de golf satisfait àl’équation différentielle canonique suivante :
z + v20 z = a
v0 et a étant deux grandeurs dont on déterminera l’expression en fonction de V , g , K = I/mr2b et
h la profondeur du trou ; on supposera que Vr = 0 pour z = h .
d) Pourquoi la résolution de l’équation différentielle précédente permet-elle de lever le paradoxe ?
C
Ox x
y
Trou
I
RR0
w
ew
er
C
Ox
rbrc
y
z
z
hR
g
a) b)
I
FIG. 19.2.
c ©D
unod
–To
ute
repr
oduc
tion
non
auto
risé
ees
tun
délit
©Dunod, Paris, 2014
10 Mécanique, 7e édition
CHAPITRE 20
P20– 1. Arrimage du vaisseau Soyouz TMA-2 sur la station spatiale internationale ISS
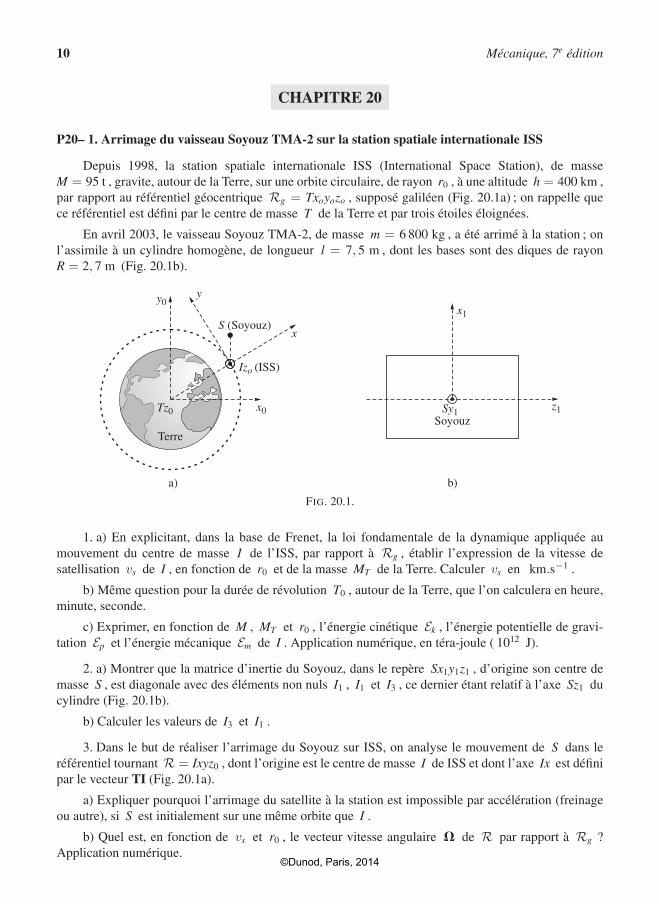
Depuis 1998, la station spatiale internationale ISS (International Space Station), de masseM = 95 t , gravite, autour de la Terre, sur une orbite circulaire, de rayon r0 , à une altitude h = 400 km ,par rapport au référentiel géocentrique Rg = Txoyozo , supposé galiléen (Fig. 20.1a) ; on rappelle quece référentiel est défini par le centre de masse T de la Terre et par trois étoiles éloignées.
En avril 2003, le vaisseau Soyouz TMA-2, de masse m = 6 800 kg , a été arrimé à la station ; onl’assimile à un cylindre homogène, de longueur l = 7, 5 m , dont les bases sont des diques de rayonR = 2, 7 m (Fig. 20.1b).
Terre
Tz0 Sy1z1
x1
x0
y0y
S (Soyouz)
Soyouz
b)a)
x
Izo (ISS)
FIG. 20.1.
1. a) En explicitant, dans la base de Frenet, la loi fondamentale de la dynamique appliquée aumouvement du centre de masse I de l’ISS, par rapport à Rg , établir l’expression de la vitesse desatellisation vs de I , en fonction de r0 et de la masse MT de la Terre. Calculer vs en km.s−1 .
b) Même question pour la durée de révolution T0 , autour de la Terre, que l’on calculera en heure,minute, seconde.
c) Exprimer, en fonction de M , MT et r0 , l’énergie cinétique Ek , l’énergie potentielle de gravi-tation Ep et l’énergie mécanique Em de I . Application numérique, en téra-joule ( 1012 J).
2. a) Montrer que la matrice d’inertie du Soyouz, dans le repère Sx1y1z1 , d’origine son centre demasse S , est diagonale avec des éléments non nuls I1 , I1 et I3 , ce dernier étant relatif à l’axe Sz1 ducylindre (Fig. 20.1b).
b) Calculer les valeurs de I3 et I1 .
3. Dans le but de réaliser l’arrimage du Soyouz sur ISS, on analyse le mouvement de S dans leréférentiel tournant R = Ixyz0 , dont l’origine est le centre de masse I de ISS et dont l’axe Ix est définipar le vecteur TI (Fig. 20.1a).
a) Expliquer pourquoi l’arrimage du satellite à la station est impossible par accélération (freinageou autre), si S est initialement sur une même orbite que I .
b) Quel est, en fonction de vs et r0 , le vecteur vitesse angulaire V de R par rapport à Rg ?Application numérique.
©Dunod, Paris, 2014
Mécanique, 7e édition 11
c) Effectuer le bilan des forces qui s’exercent sur le satellite S dans le référentiel R , sachant quel’on néglige la force de gravitation qu’exerce ISS devant celle due à la Terre. Exprimer cette dernière enfonction de r = IS .
d) Établir la relation vectorielle qui résulte de l’application du théorème du centre de masse aumouvement du Soyouz, par rapport à R .
4. a) Comme S et I sont très proches l’un de l’autre, établir une relation approchée entre r , r0
et x .
b) Montrer que le mouvement de S dans R satisfait aux deux équations différentielles suivantes :
x ≈ LV2x + 2Vy et y ≈ −2Vx
L étant un facteur que l’on déterminera.
c) Quelle est l’origine physique des termes proportionnels à x et y ?
5. a) Intégrer la seconde équation différentielle, reliant y à x , dans les conditions initiales sui-vantes de l’arrimage :
x(0) = 0 y(0) = y0 x(0) = v0 y(0) = 0
b) En déduire que x(t) et y(t) sont des fonctions sinusoïdales de période T0 .
c) Calculer l’amplitude de ces oscillations, pour v0 = 1 mm.s−1 . Commenter.
d) Montrer que la trajectoire décrite par S dans R est une ellipse, dont on déterminera le centreet les axes. En déduire que la durée nécessaire à l’arrimage peut s’écrire aT0 , a étant un facteur quel’on déterminera. Quelle doit être la valeur correspondante de y0 ?
y0
x0
r0rT
Tz0
r
y
x
S (satellite)
Terre
I (station orbitale)
R
FIG. 20.2.
CHAPITRE 21
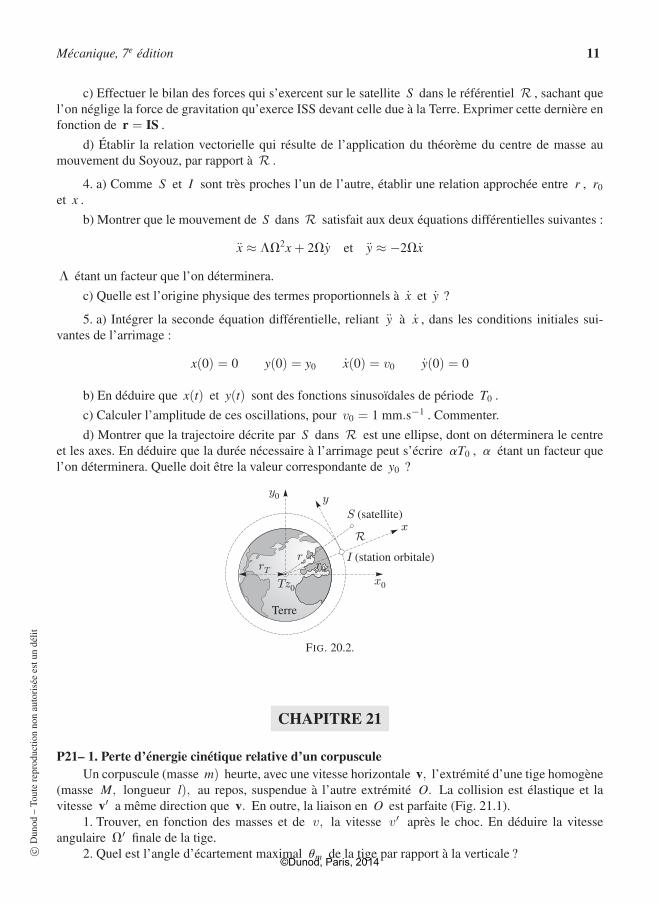
P21– 1. Perte d’énergie cinétique relative d’un corpusculeUn corpuscule (masse m) heurte, avec une vitesse horizontale v, l’extrémité d’une tige homogène
(masse M, longueur l), au repos, suspendue à l’autre extrémité O. La collision est élastique et lavitesse v′ a même direction que v. En outre, la liaison en O est parfaite (Fig. 21.1).
1. Trouver, en fonction des masses et de v, la vitesse v′ après le choc. En déduire la vitesseangulaire V′ finale de la tige.
2. Quel est l’angle d’écartement maximal um de la tige par rapport à la verticale ?c ©D
unod
–To
ute
repr
oduc
tion
non
auto
risé
ees
tun
délit
©Dunod, Paris, 2014

12 Mécanique, 7e édition
3. Exprimer, en fonction du rapport des masses h = m/M, la perte d’énergie cinétique relative qdu point matériel incident. Pour quelle valeur de h, cette perte est-elle maximale ?
4. Applications numériques : m = 10 g, M = 0, 1 kg, l = 20 cm, v = 5 m . s−1. Calculer v′,um et q.
v
g
A
C
O
FIG. 21.1.
P21– 2. Amplification paramétrique d’une escarpolette
Un enfant se balance, sans aide extérieure, sur une escarpolette (siège suspendu par des cordes) dontil amplifie les oscillations en s’accroupissant et en se relevant alternativement. On assimile son mouve-ment à celui d’une tige rigide OA, oscillant parfaitement dans un plan vertical autour du point O. Laposition du centre de masse C de la tige et son moment d’inertie I par rapport à l’axe Oz, perpendicu-laire au plan du mouvement, varient avec la position de l’enfant. À un instant où la vitesse angulaire dela tige est v, l’enfant change de position en un temps suffisamment bref pour que le déplacement cor-respondant de la tige puisse être négligé.
1. Montrer qu’il se produit une variation brusque de la vitesse angulaire. Calculer la variationd’énergie cinétique du système et en préciser l’origine.
2. L’enfant se lève et se baisse une fois pour chaque demi-oscillation. Quand doit-il de préférencemodifier sa position ?
3. Initialement, l’escarpolette est écartée de la verticale d’un angle u0 faible et la vitesse angu-laire est nulle. Au bout de combien de passages par la position d’équilibre peut-elle, dans ces condi-tions, atteindre la direction horizontale ? On exprimera le résultat en fonction de u0 et du rapportK = I2OC2/I1OC1, l’indice 1 se rapportant à la situation enfant accroupi et l’indice 2 à la situa-tion enfant redressé.
CHAPITRE 23
P23– 1. Mouvement commençant d’un cube sur un plan incliné
Un cube homogène de masse m, de côté 2a, repose par une de ses faces sur le plan Ox1y1 quifait l’angle a avec le plan horizontal Ox0y0 (Ox0 confondu avec Ox1). Un côté du cube coïncideavec une horizontale du plan incliné. On désigne par ms le facteur de frottement statique du cube sur leplan Ox1y1. Le cube est abandonné sans vitesse initiale.
1. Préciser, en fonction de ms et de tan a, les conditions d’équilibre du cube. Pour cette questionet la suivante, on pourra considérer la réaction du plan incliné sur le cube comme une force ponctuelleappliquée en un point I situé entre A et B (Fig. 23.1).
2. Étudier, en fonction de m et de tan a, les conditions du mouvement commençant suivant :glissement pur sans basculement.
3. Même question qu’en 2 . pour un basculement sans glissement.©Dunod, Paris, 2014
Mécanique, 7e édition 13
4. Même question qu’en 2 . pour un basculement avec glissement.
5. Récapituler les résultats en représentant les domaines d’existence des différents cas dans le quartdu plan (m, tan a).
A
z1B
z0
y1
x1
C
y0αO
I
FIG. 23.1.
CHAPITRE 24
P24– 1. Masselotte sur une tige en rotation
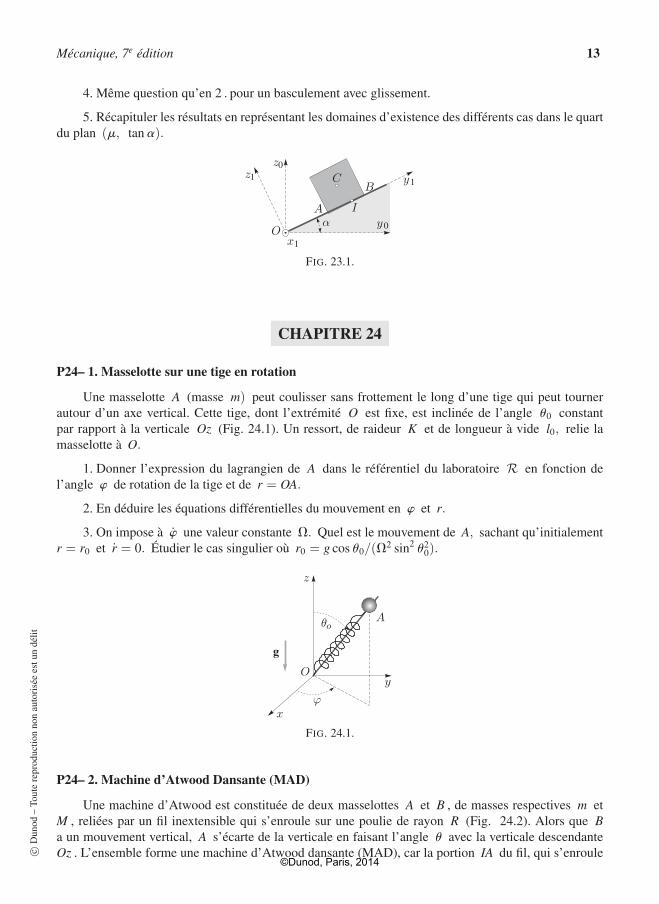
Une masselotte A (masse m) peut coulisser sans frottement le long d’une tige qui peut tournerautour d’un axe vertical. Cette tige, dont l’extrémité O est fixe, est inclinée de l’angle u0 constantpar rapport à la verticale Oz (Fig. 24.1). Un ressort, de raideur K et de longueur à vide l0, relie lamasselotte à O.
1. Donner l’expression du lagrangien de A dans le référentiel du laboratoire R en fonction del’angle w de rotation de la tige et de r = OA.
2. En déduire les équations différentielles du mouvement en w et r.
3. On impose à w une valeur constante V. Quel est le mouvement de A, sachant qu’initialementr = r0 et r = 0. Étudier le cas singulier où r0 = g cos u0/(V2 sin2 u2
0).
x
Oy
z
ϕ
θoA
g
FIG. 24.1.
P24– 2. Machine d’Atwood Dansante (MAD)
Une machine d’Atwood est constituée de deux masselottes A et B , de masses respectives m etM , reliées par un fil inextensible qui s’enroule sur une poulie de rayon R (Fig. 24.2). Alors que Ba un mouvement vertical, A s’écarte de la verticale en faisant l’angle u avec la verticale descendanteOz . L’ensemble forme une machine d’Atwood dansante (MAD), car la portion IA du fil, qui s’enroulec ©D
unod
–To
ute
repr
oduc
tion
non
auto
risé
ees
tun
délit
©Dunod, Paris, 2014
14 Mécanique, 7e édition
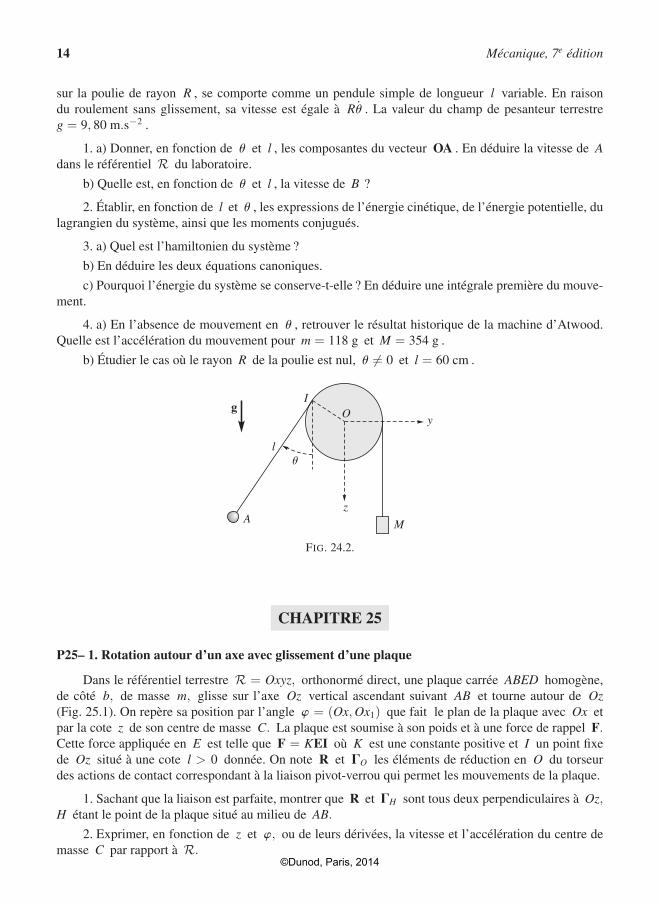
sur la poulie de rayon R , se comporte comme un pendule simple de longueur l variable. En raisondu roulement sans glissement, sa vitesse est égale à Ru . La valeur du champ de pesanteur terrestreg = 9, 80 m.s−2 .
1. a) Donner, en fonction de u et l , les composantes du vecteur OA . En déduire la vitesse de Adans le référentiel R du laboratoire.
b) Quelle est, en fonction de u et l , la vitesse de B ?
2. Établir, en fonction de l et u , les expressions de l’énergie cinétique, de l’énergie potentielle, dulagrangien du système, ainsi que les moments conjugués.
3. a) Quel est l’hamiltonien du système ?
b) En déduire les deux équations canoniques.
c) Pourquoi l’énergie du système se conserve-t-elle ? En déduire une intégrale première du mouve-ment.
4. a) En l’absence de mouvement en u , retrouver le résultat historique de la machine d’Atwood.Quelle est l’accélération du mouvement pour m = 118 g et M = 354 g .
b) Étudier le cas où le rayon R de la poulie est nul, u �= 0 et l = 60 cm .
g O
l
A M
I
z
y
u
FIG. 24.2.
CHAPITRE 25
P25– 1. Rotation autour d’un axe avec glissement d’une plaque
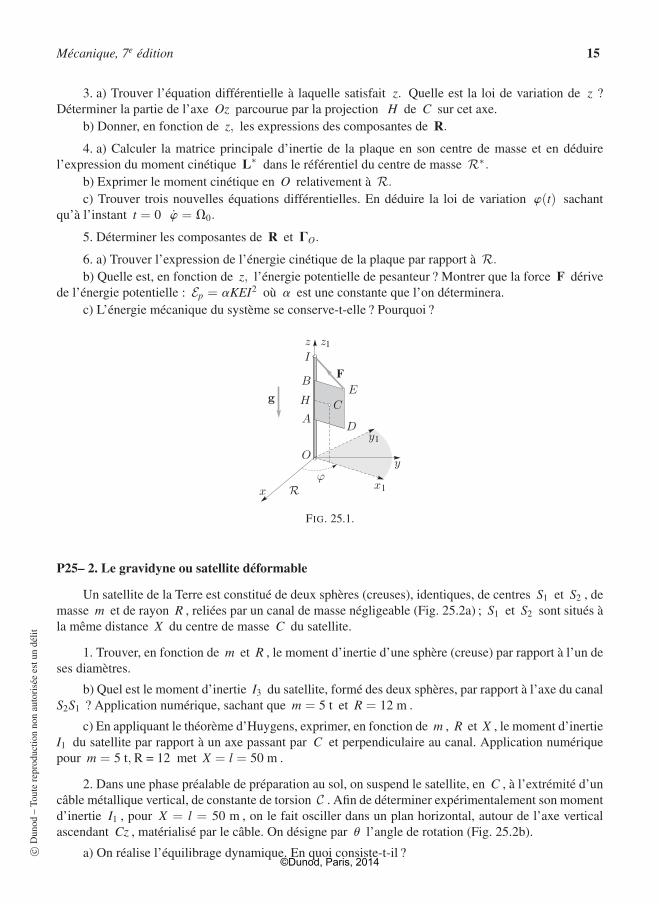
Dans le référentiel terrestre R = Oxyz, orthonormé direct, une plaque carrée ABED homogène,de côté b, de masse m, glisse sur l’axe Oz vertical ascendant suivant AB et tourne autour de Oz(Fig. 25.1). On repère sa position par l’angle w = (Ox, Ox1) que fait le plan de la plaque avec Ox etpar la cote z de son centre de masse C. La plaque est soumise à son poids et à une force de rappel F.Cette force appliquée en E est telle que F = KEI où K est une constante positive et I un point fixede Oz situé à une cote l > 0 donnée. On note R et GO les éléments de réduction en O du torseurdes actions de contact correspondant à la liaison pivot-verrou qui permet les mouvements de la plaque.
1. Sachant que la liaison est parfaite, montrer que R et GH sont tous deux perpendiculaires à Oz,H étant le point de la plaque situé au milieu de AB.
2. Exprimer, en fonction de z et w, ou de leurs dérivées, la vitesse et l’accélération du centre demasse C par rapport à R.
©Dunod, Paris, 2014
Mécanique, 7e édition 15
3. a) Trouver l’équation différentielle à laquelle satisfait z. Quelle est la loi de variation de z ?Déterminer la partie de l’axe Oz parcourue par la projection H de C sur cet axe.
b) Donner, en fonction de z, les expressions des composantes de R.
4. a) Calculer la matrice principale d’inertie de la plaque en son centre de masse et en déduirel’expression du moment cinétique L∗ dans le référentiel du centre de masse R∗.
b) Exprimer le moment cinétique en O relativement à R.
c) Trouver trois nouvelles équations différentielles. En déduire la loi de variation w(t) sachantqu’à l’instant t = 0 w = V0.
5. Déterminer les composantes de R et GO.
6. a) Trouver l’expression de l’énergie cinétique de la plaque par rapport à R.
b) Quelle est, en fonction de z, l’énergie potentielle de pesanteur ? Montrer que la force F dérivede l’énergie potentielle : Ep = aKEI2 où a est une constante que l’on déterminera.
c) L’énergie mécanique du système se conserve-t-elle ? Pourquoi ?
x
z
y
z1
x1
y1
ϕ
I
gB
H
A
O
FE
R
C
D
FIG. 25.1.
P25– 2. Le gravidyne ou satellite déformable
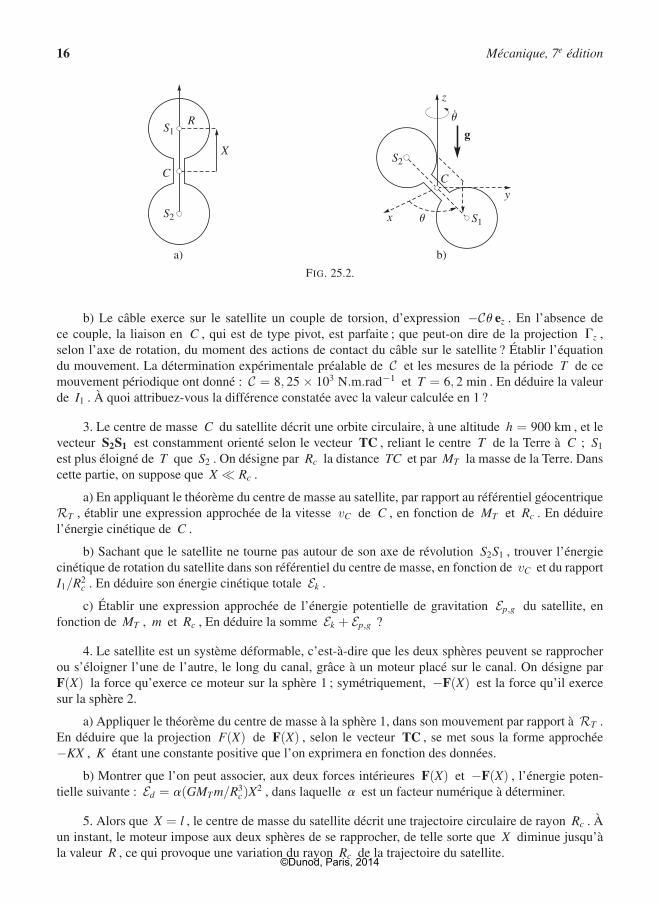
Un satellite de la Terre est constitué de deux sphères (creuses), identiques, de centres S1 et S2 , demasse m et de rayon R , reliées par un canal de masse négligeable (Fig. 25.2a) ; S1 et S2 sont situés àla même distance X du centre de masse C du satellite.
1. Trouver, en fonction de m et R , le moment d’inertie d’une sphère (creuse) par rapport à l’un deses diamètres.
b) Quel est le moment d’inertie I3 du satellite, formé des deux sphères, par rapport à l’axe du canalS2S1 ? Application numérique, sachant que m = 5 t et R = 12 m .
c) En appliquant le théorème d’Huygens, exprimer, en fonction de m , R et X , le moment d’inertieI1 du satellite par rapport à un axe passant par C et perpendiculaire au canal. Application numériquepour m = 5 t, R = 12 met X = l = 50 m .
2. Dans une phase préalable de préparation au sol, on suspend le satellite, en C , à l’extrémité d’uncâble métallique vertical, de constante de torsion C . Afin de déterminer expérimentalement son momentd’inertie I1 , pour X = l = 50 m , on le fait osciller dans un plan horizontal, autour de l’axe verticalascendant Cz , matérialisé par le câble. On désigne par u l’angle de rotation (Fig. 25.2b).
a) On réalise l’équilibrage dynamique. En quoi consiste-t-il ?c ©D
unod
–To
ute
repr
oduc
tion
non
auto
risé
ees
tun
délit
©Dunod, Paris, 2014
16 Mécanique, 7e édition
.u
u
g
a) b)
z
y
x
CC
X
RS1
S1S2
S2
FIG. 25.2.
b) Le câble exerce sur le satellite un couple de torsion, d’expression −Cu ez . En l’absence dece couple, la liaison en C , qui est de type pivot, est parfaite ; que peut-on dire de la projection Gz ,selon l’axe de rotation, du moment des actions de contact du câble sur le satellite ? Établir l’équationdu mouvement. La détermination expérimentale préalable de C et les mesures de la période T de cemouvement périodique ont donné : C = 8, 25 × 103 N.m.rad−1 et T = 6, 2 min . En déduire la valeurde I1 . À quoi attribuez-vous la différence constatée avec la valeur calculée en 1 ?
3. Le centre de masse C du satellite décrit une orbite circulaire, à une altitude h = 900 km , et levecteur S2S1 est constamment orienté selon le vecteur TC , reliant le centre T de la Terre à C ; S1
est plus éloigné de T que S2 . On désigne par Rc la distance TC et par MT la masse de la Terre. Danscette partie, on suppose que X � Rc .
a) En appliquant le théorème du centre de masse au satellite, par rapport au référentiel géocentriqueRT , établir une expression approchée de la vitesse vC de C , en fonction de MT et Rc . En déduirel’énergie cinétique de C .
b) Sachant que le satellite ne tourne pas autour de son axe de révolution S2S1 , trouver l’énergiecinétique de rotation du satellite dans son référentiel du centre de masse, en fonction de vC et du rapportI1/R2
c . En déduire son énergie cinétique totale Ek .
c) Établir une expression approchée de l’énergie potentielle de gravitation Ep,g du satellite, enfonction de MT , m et Rc , En déduire la somme Ek + Ep,g ?
4. Le satellite est un système déformable, c’est-à-dire que les deux sphères peuvent se rapprocherou s’éloigner l’une de l’autre, le long du canal, grâce à un moteur placé sur le canal. On désigne parF(X) la force qu’exerce ce moteur sur la sphère 1 ; symétriquement, −F(X) est la force qu’il exercesur la sphère 2.
a) Appliquer le théorème du centre de masse à la sphère 1, dans son mouvement par rapport à RT .En déduire que la projection F(X) de F(X) , selon le vecteur TC , se met sous la forme approchée−KX , K étant une constante positive que l’on exprimera en fonction des données.
b) Montrer que l’on peut associer, aux deux forces intérieures F(X) et −F(X) , l’énergie poten-tielle suivante : Ed = a(GMTm/R3
c)X2 , dans laquelle a est un facteur numérique à déterminer.
5. Alors que X = l , le centre de masse du satellite décrit une trajectoire circulaire de rayon Rc . Àun instant, le moteur impose aux deux sphères de se rapprocher, de telle sorte que X diminue jusqu’àla valeur R , ce qui provoque une variation du rayon Rc de la trajectoire du satellite.
©Dunod, Paris, 2014

Mécanique, 7e édition 17
a) En appliquant le théorème de l’énergie mécanique, au système déformable constitué par le sa-tellite, entre l’état initial où X = l et l’état final pour lequel X = R , montrer que :
DRc
Rc≈ b
l2 − R2
R2c
b étant un facteur, de l’ordre de quelques unités, que l’on déterminera.
b) Application numérique. Commenter.
On rappelle :
G = 6, 67 × 10−11 m3.kg−1.s−2 , constante de gravitation,
MT ≈ 6 × 1024 kg , masse de la Terre,
RT = 6 400 km , rayon moyen de la Terre.
CHAPITRE 26
P26– 1. Mouvement d’une barre autour d’un point
Une barre homogène OB, de masse m, de longueur l, est mobile sans frottement, autour de sonextrémité O fixe, dans le champ de pesanteur (Fig. 26.1). Cette barre est soumise à la force supplémen-taire : Fr = −K IC, C étant le centre de masse de la barre, I un point de l’axe vertical Oz situé à lahauteur 3l/2. On se propose d’étudier son mouvement par rapport au référentiel terrestre R = Oxyz.
1. a) Trouver l’expression de l’énergie potentielle de la barre en fonction de l’angle u qu’elle faitavec la verticale. En déduire les positions d’équilibre et étudier leur stabilité.
b) Exprimer, en fonction de u et c, l’énergie cinétique de la barre par rapport à R.
c) Trouver deux constantes du mouvement.
2. Étude de deux cas particuliers de mouvement.
a) À l’instant t = 0 on écarte légèrement la barre de sa position d’équilibre stable d’un angle u0
petit, avec u0 = 0 et c0 = 0. Déterminer la période des petites oscillations.
b) Les conditions initiales sont : u0 = p/2, u0 = 0 et c0 = 2(g/l)1/2. Étudier le mouvement del’extrémité libre B de la barre. On effectuera, dans l’équation u2 = f (u), le changement de variableu = cos u.
z
x
y
O
C
IB
u g
FIG. 26.1.
c ©D
unod
–To
ute
repr
oduc
tion
non
auto
risé
ees
tun
délit
©Dunod, Paris, 2014

18 Mécanique, 7e édition
CHAPITRE 31
P31– 1. Boule de pétanque et balle de tennis
On se propose de comparer la chute dans l’air, d’une hauteur h = 2 m, d’une boule de pétanqueBp (masse mp = 700 kg, diamètre 2Rp = 7, 6 cm) et d’une balle de tennis Bt (masse mt = 58 g,diamètre 2Rt = 6, 7 cm). On admet que la force de frottement visqueux est de la forme Ff = −bv2 ex
avec b = CxrS/2, r étant la masse volumique de l’air, S la surface des boules projetée dans un planperpendiculaire à la direction du mouvement et Cx le facteur de profil du corps égal à 0, 25 dans le casd’une sphère.
1. Montrer que la poussée d’Archimède due à l’air est négligeable devant le poids.
2. Établir l’expression suivante de la vitesse v du centre de masse de la boule : v = vl tanh (gt/vl) ,vl étant une quantité que l’on exprimera en fonction de m, g et b. Retrouver l’approximation newto-nienne.
3. En déduire l’expression suivante de la position x du centre de masse de la boule, le long de laverticale descendante :
x(t) =
v2l
g
�2
ln�cosh
�gtvl
�
Donner une expression approchée de x(t) jusqu’au terme en t4 inclus. Commenter.
4. On admet, dans les deux cas, la même valeur b = 12 × 10−4 SI. Calculer vl dans ces deuxcas. En déduire que le mouvement de Bp est une chute libre dans le vide avec une excellente précisionque l’on calculera.
5. Quelle est la distance parcourue par Bt pendant la duré de chute de Bp ? En déduire l’écartentre les deux billes en fin de chute. Commenter.
©Dunod, Paris, 2014