![Considera um triângulo [ABC], rectângulo em B e cujos ... · PDF filequadrado do maior, obtenho sempre um número que não é múltiplo de dois.” ... de o cubo escolhido ter só](https://static.fdocument.org/doc/165x107/5a76a81b7f8b9aa3688d5e78/considera-um-triangulo-abc-rectangulo-em-b-e-cujos-quadrado-do-maior.jpg)
Estabilidade de Pontos Fixosportal.if.usp.br/controle/sites/portal.if.usp.br.ifusp...p é um ponto...
39
Estabilidade de Pontos Fixos
Transcript of Estabilidade de Pontos Fixosportal.if.usp.br/controle/sites/portal.if.usp.br.ifusp...p é um ponto...
Estabilidade de Pontos Fixos
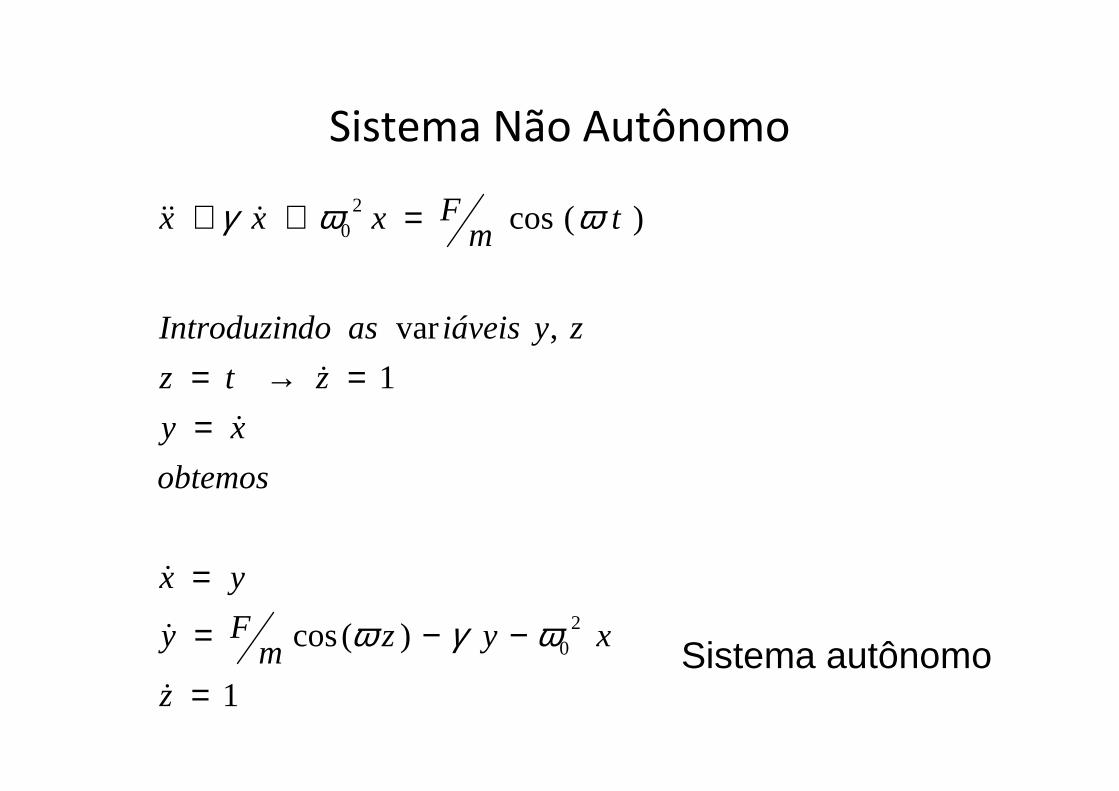
Sistema Não Autônomo
1
)(cos
1
,var
)(cos
20
20
=
−−=
=
==→=
=++
z
xyzmFy
yx
obtemos
xy
ztz
zyiáveisasdoIntroduzin
tmFxxx
&
&
&
&
&
&&&
ωγω
ωωγ
Sistema autônomo
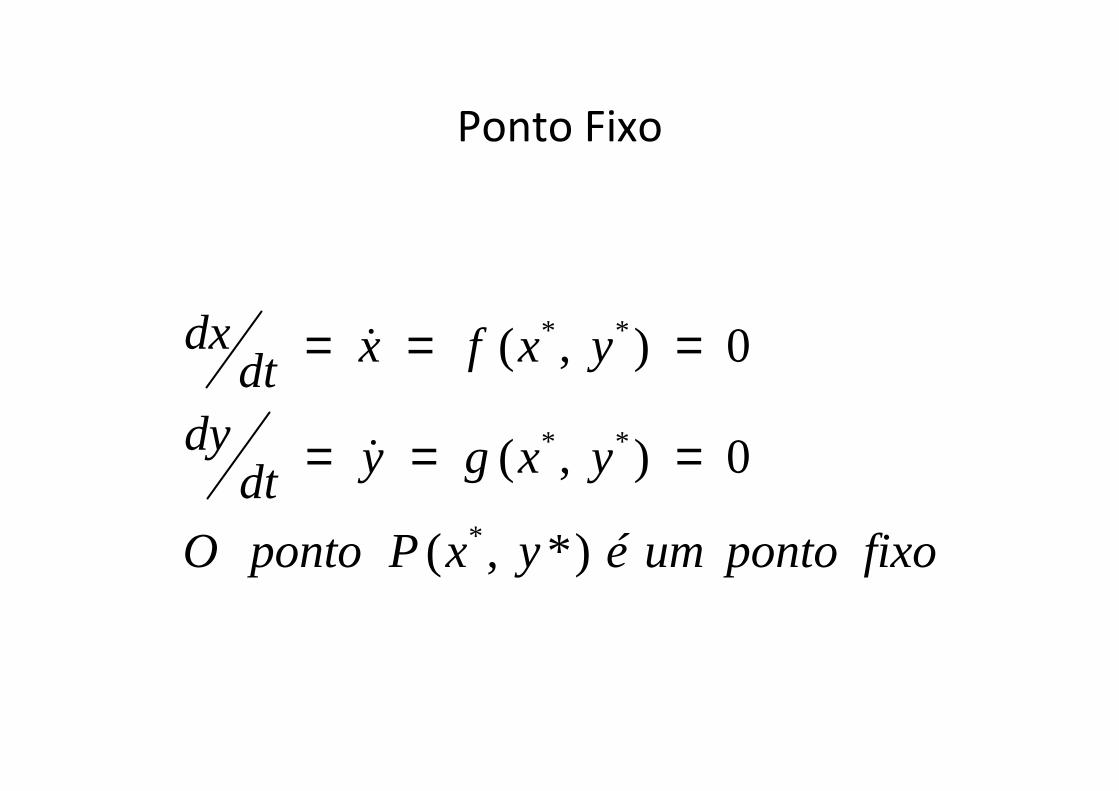
Ponto Fixo
fixopontouméyxPpontoO
yxgydtdy
yxfxdtdx
)*,(
0),(
0),(
*
**
**
===
===
&
&
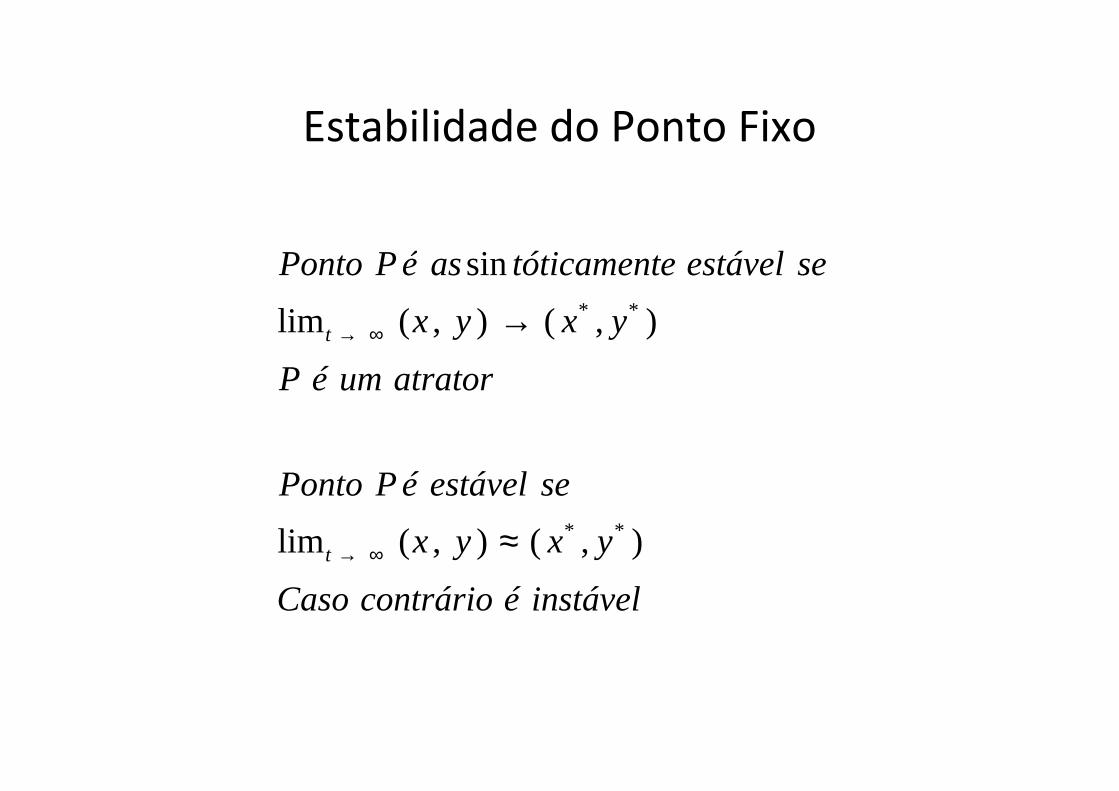
Estabilidade do Ponto Fixo
instávelécontrárioCaso
yxyx
seestáveléPPonto
atratoruméP
yxyx
seestáveletóticamentaséPPonto
t
t
),(),(lim
),(),(lim
sin
**
**
≈
→
∞→
∞→
Estabilidade Estrutural
0
)0(
0
20
20
=++
≠=+
xxx
atritomosconsiderarsealteradassão
xx
idealpêndulodoequaçãodasoluçõesAs
ωγγ
ω
&&&
&&
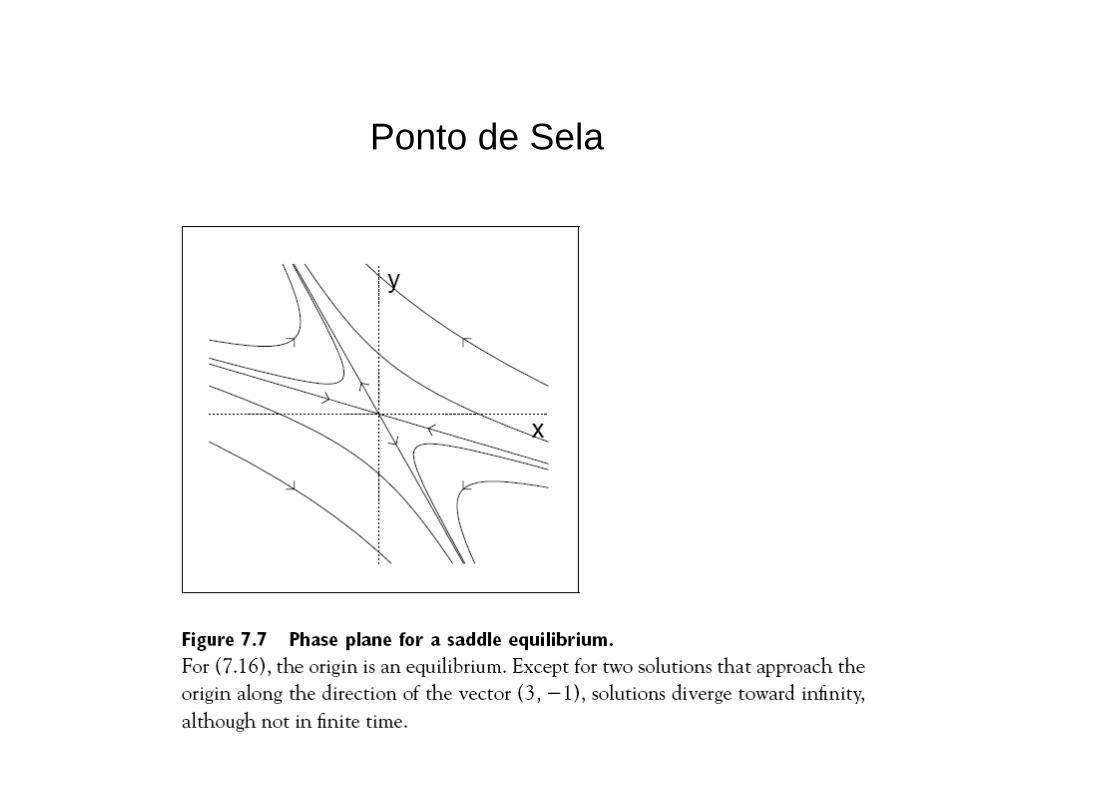
Ponto de Sela
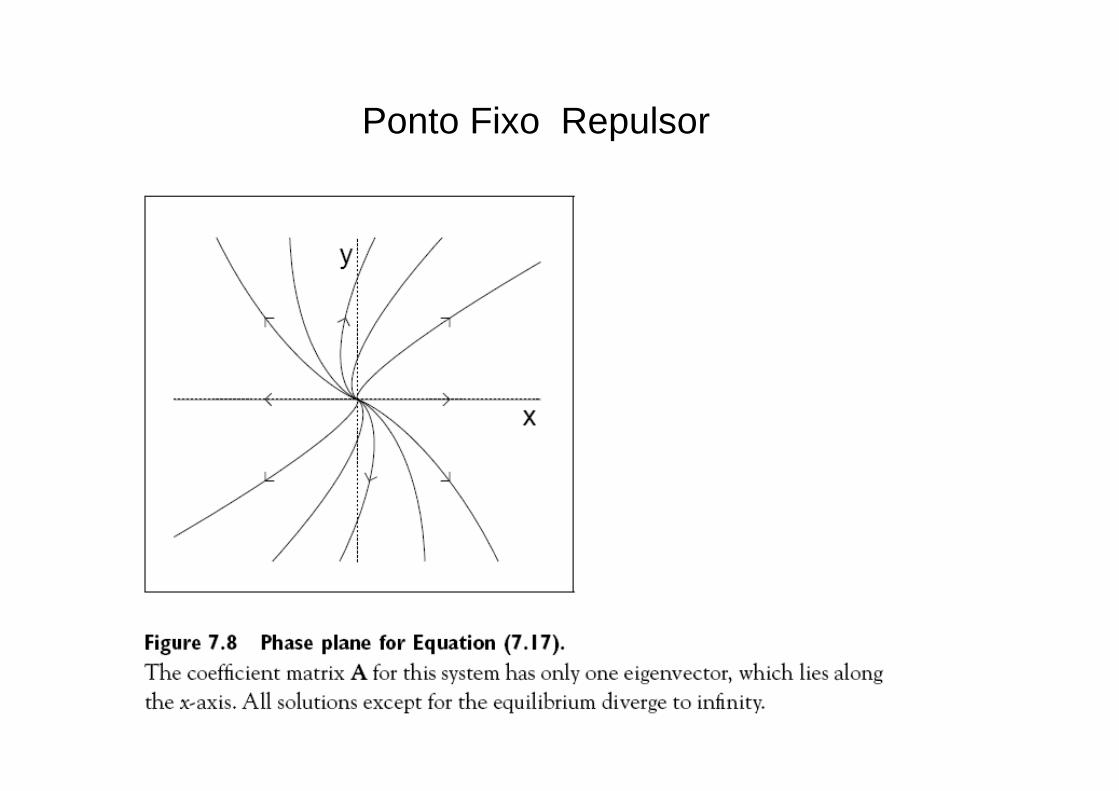
Ponto Fixo Repulsor
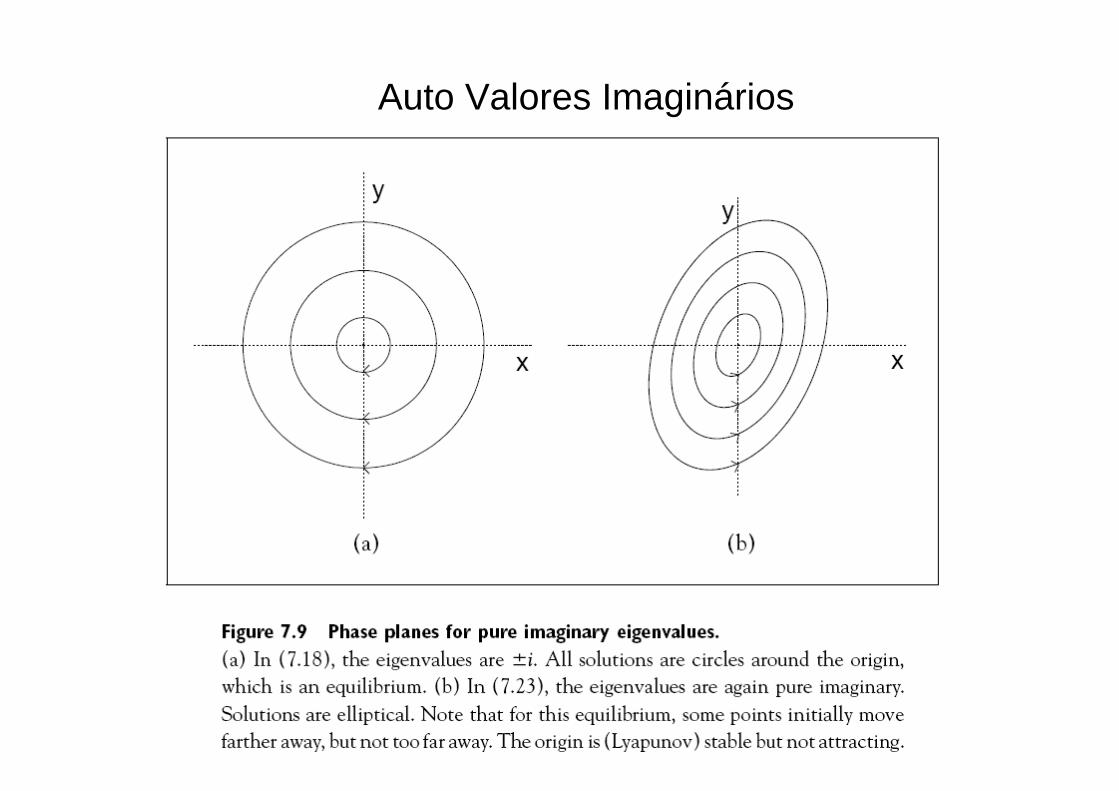
Auto Valores Imaginários
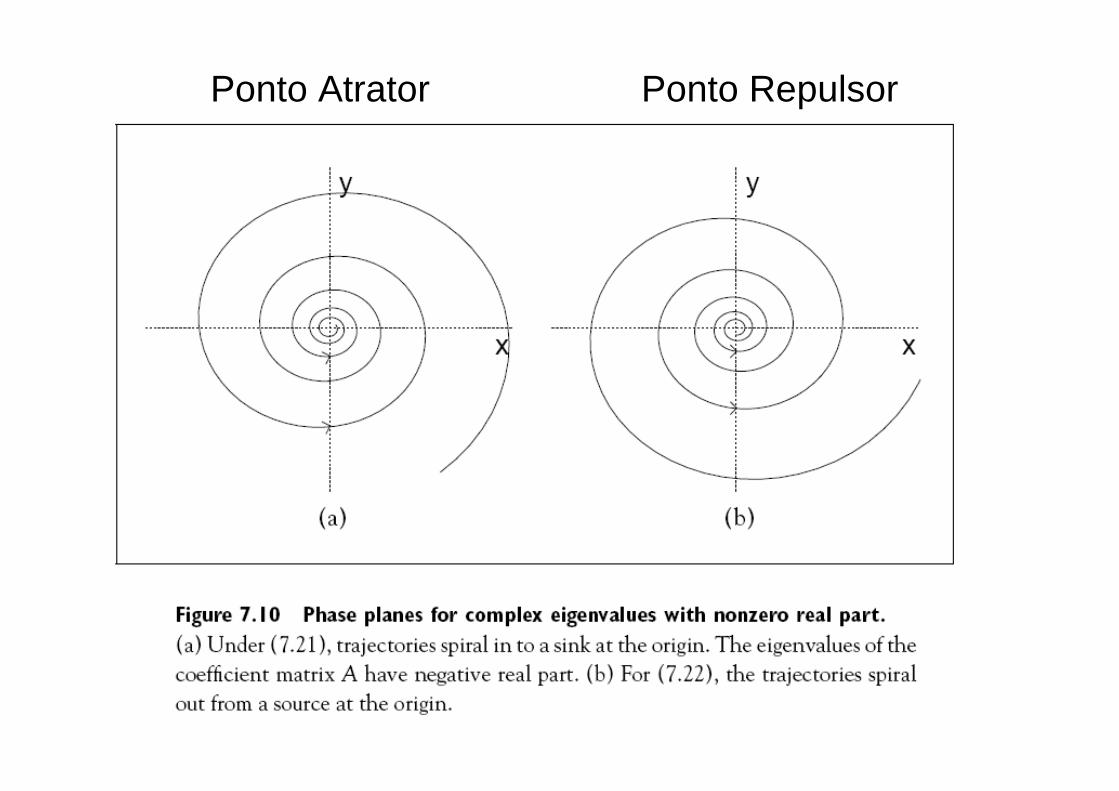
Ponto Atrator Ponto Repulsor
Mapa Logístico
{ } { }
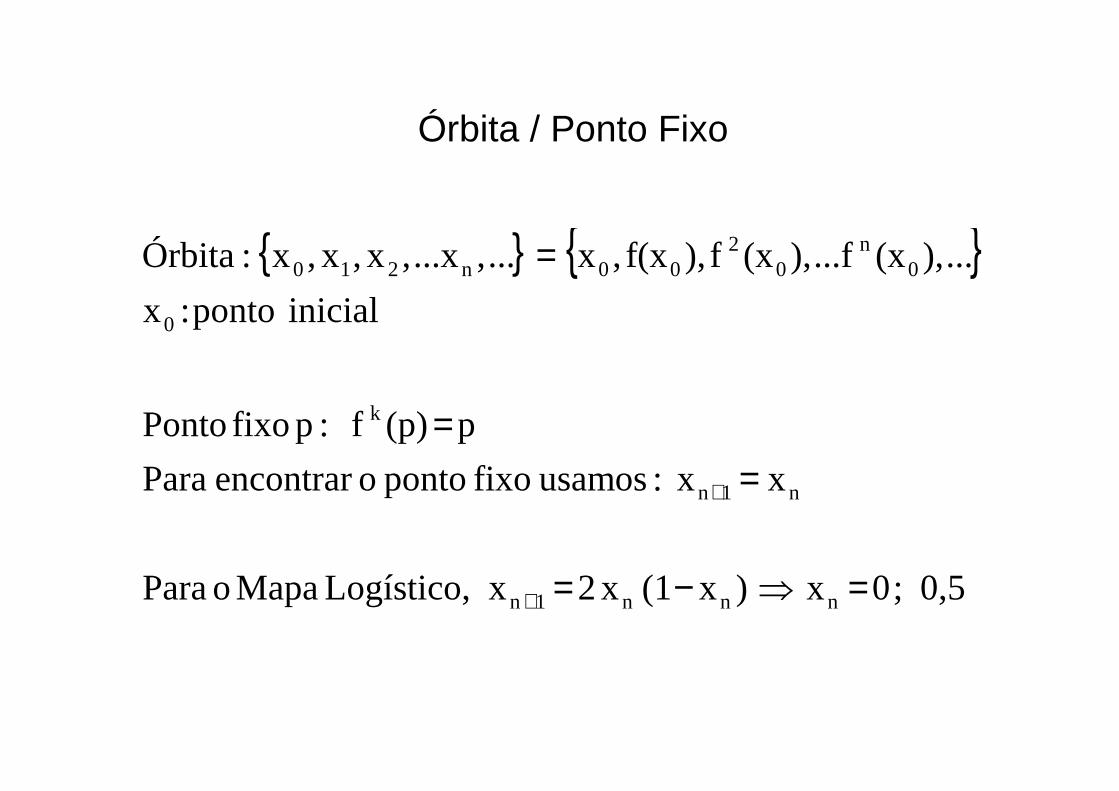
0,5;0x)x(1x2xLogístico,MapaoPara
x x:usamos fixo ponto oencontrar Para
p(p)f:pfixoPonto
inicial ponto:x
...),(x...f),(xf),f(x,x...,...x,x,x,x:Órbita
nnn1n
n1n
k
0
0n
02
00n210
=⇒−=
==
=
+
+
Órbita / Ponto Fixo
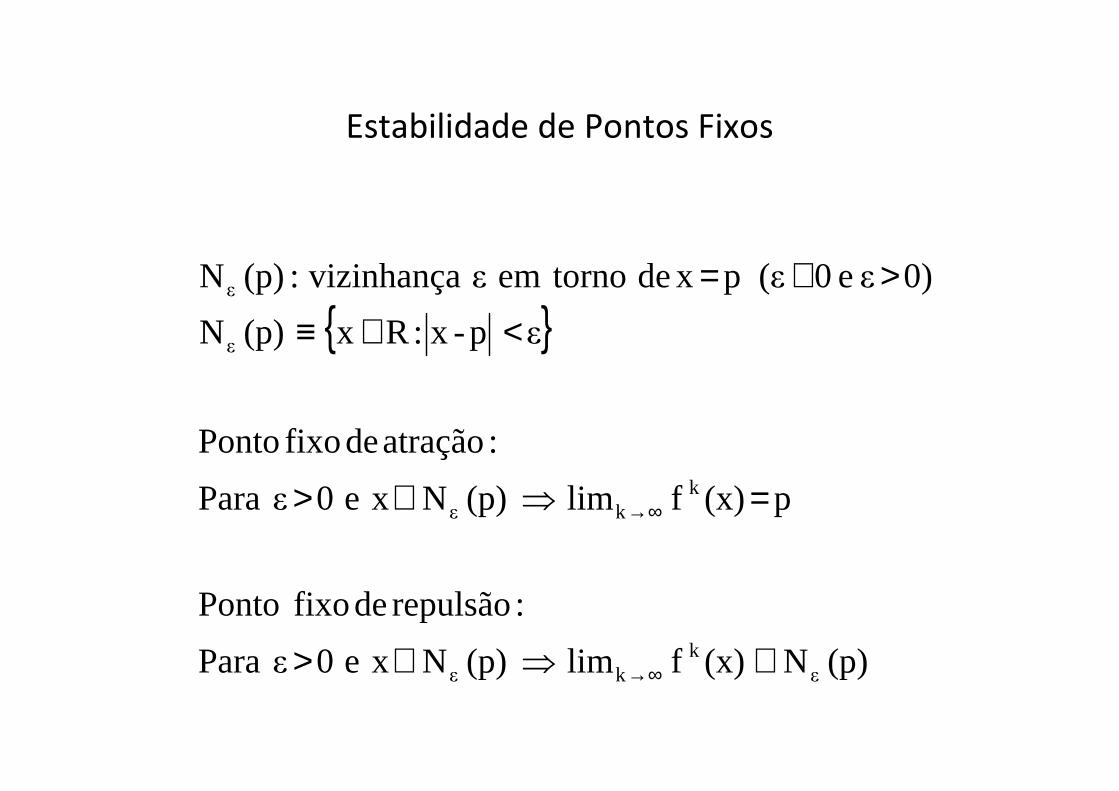
Estabilidade de Pontos Fixos
{ }
(p)N(x)flim (p)Nxe0εPara
:repulsãodefixo Ponto
p(x)flim (p)Nxe0εPara
:atraçãodefixoPonto
εp-x:Rx(p)N
0)ε e 0(εpxdetornoemεvizinhança:(p)N
ε
kkε
kkε
ε
ε
∉⇒∈>
=⇒∈>
<∈≡>≅=
∞→
∞→
10int5,0
10)5,0(
12)0(
0)5,0(0)0(5,0;0:
)1(21
<<=
⇒<=′⇒>=′
==
−=+
xervalooéxdeatraçãodebaciaA
atraçãodepontof
repulsãodepontof
feffixosPontos
xxxLogísticoMapa nnn
Exemplo
Pontos periódicos
1(0,8236)f12904,0(0,4794)f
0,8236(0,8236)f0,4794(0,4794)f
:2períodocomestáveisperiódicasÓrbitas
.0,696969..0;x:instáveisfixosPontos
3,3a)x1(xa)x(fxLogísticoMapa
22
22
nnn1n
<′<−=′==
==−==+
Mapa Logístico
atraçãodeponto12a)a
1a(g
repulsãodeponto1a(0)ga
1a0;x1xox3,a1Para
0x1xox1,a0Para
)x(1xa)(xgxLogísticoMapa
o0
o0
nnna1n
⇒<+−=−′
⇒>=′
−→⇒<<∈∀<<
→⇒<<∈∀<<
−==+
Mapa de Hénon
Hénon (Comm. Math. 50, 69, 1976) introduziu o mapa
controle de parâmetros : b a,
x)y, bx-a()y,(x f)y,x( 2nn1n1n +==++
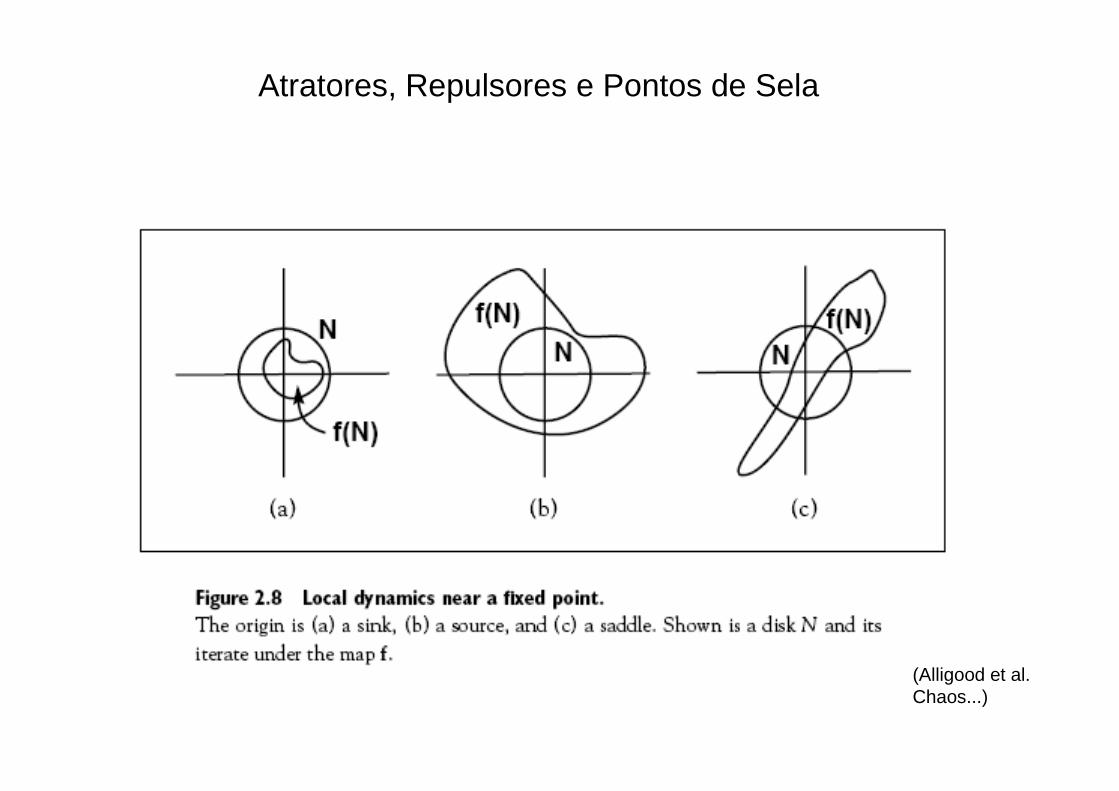
(Alligood et al.Chaos...)
Atratores, Repulsores e Pontos de Sela
5 - Mapas Lineares
( )
01
1nn1n
2221
1211
2221
1211
vvvAv
vvA
0) v (para seA matriz davalor -auto um é
wAb)v(A a)wbv(aAselinear éA :Definição
y
xV
aa
aa
aa
a a
y
xA
rrrr
rr
r
rrrr
r
+++ =⇒=
=≠
+=+
≡
++
=
=
n
yx
yx
y
x
λ
λλ
vetor-auto1
0 evalor-auto éb
1
0b
b
0
1
0
b 0
0 a
vetor-auto0
1 evalor-auto éa
0
1a
00
1
b 0
0 a
b 0
0 aA matriz a Para
Exemplo
⇒
=
=
⇒
=
=
=
a
Matriz Jacobiana
( ) ( ) ( )
( )( ) repulsor um é p1pf
atrator um é p1pf
pfh p fh p f
(p), f p fixo ponto um com dimensão, uma Em
⇒>′
⇒<′
′+≅+=
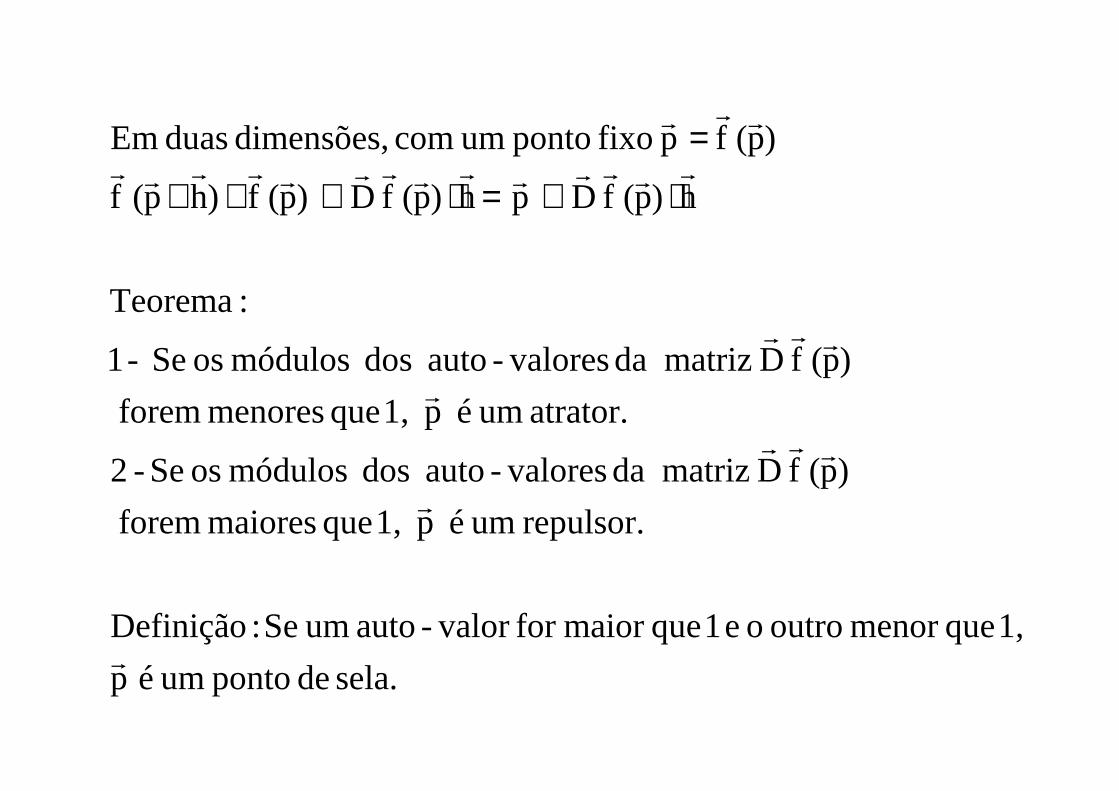
sela. de ponto um ép
1, quemenor outro o e 1 quemaior for valor -auto um Se :Definição
repulsor. um é p 1, que maiores forem
)p(f D matriz da valores-auto dos módulos os Se - 2
atrator. um é p 1, que menores forem
)p(f D matriz da valores-auto dos módulos os Se - 1
:Teorema
h)p(f Dph)p(f D)p(f)hp( f
)p(fp fixo ponto um com dimensões, duas Em
r
r
rrr
r
rrr
rrrrrrrrrrrrrr
rrr
⋅+=⋅+≅+
=
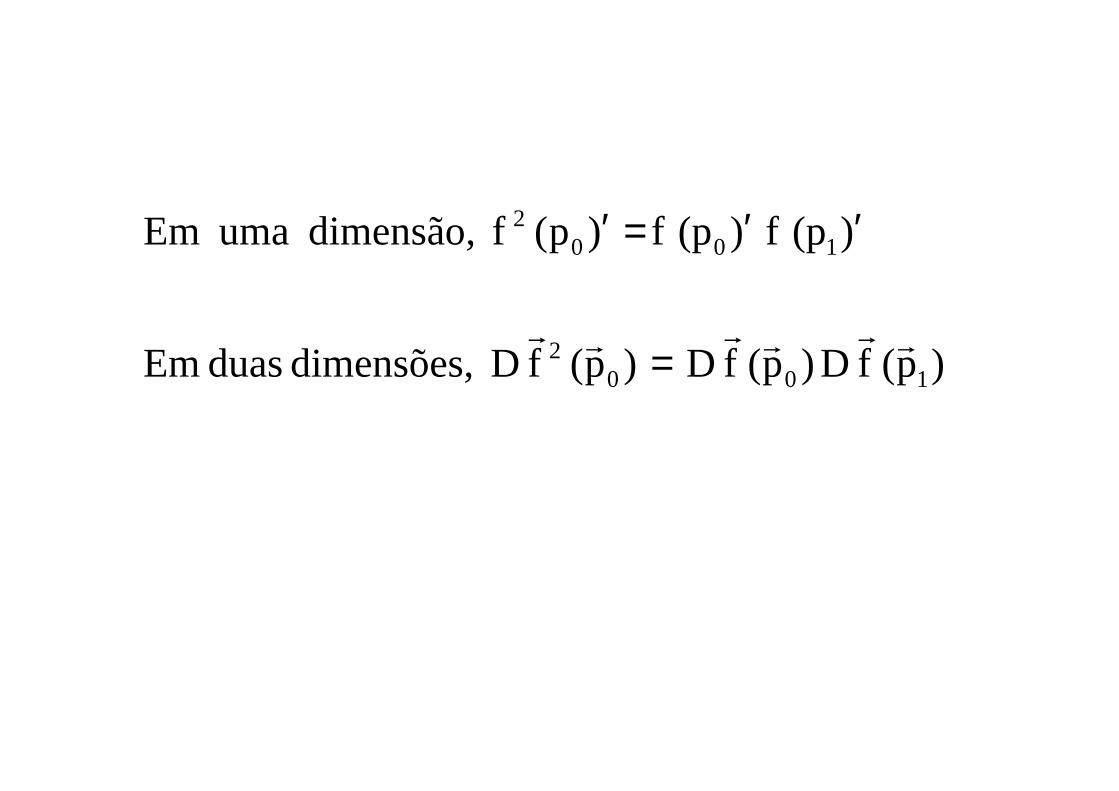
)p(f D)p(f D)p(f D dimensões, duas Em
)(p f)(p f)p(f dimensão, uma Em
1002
1002
rrrrrr=
′′=′
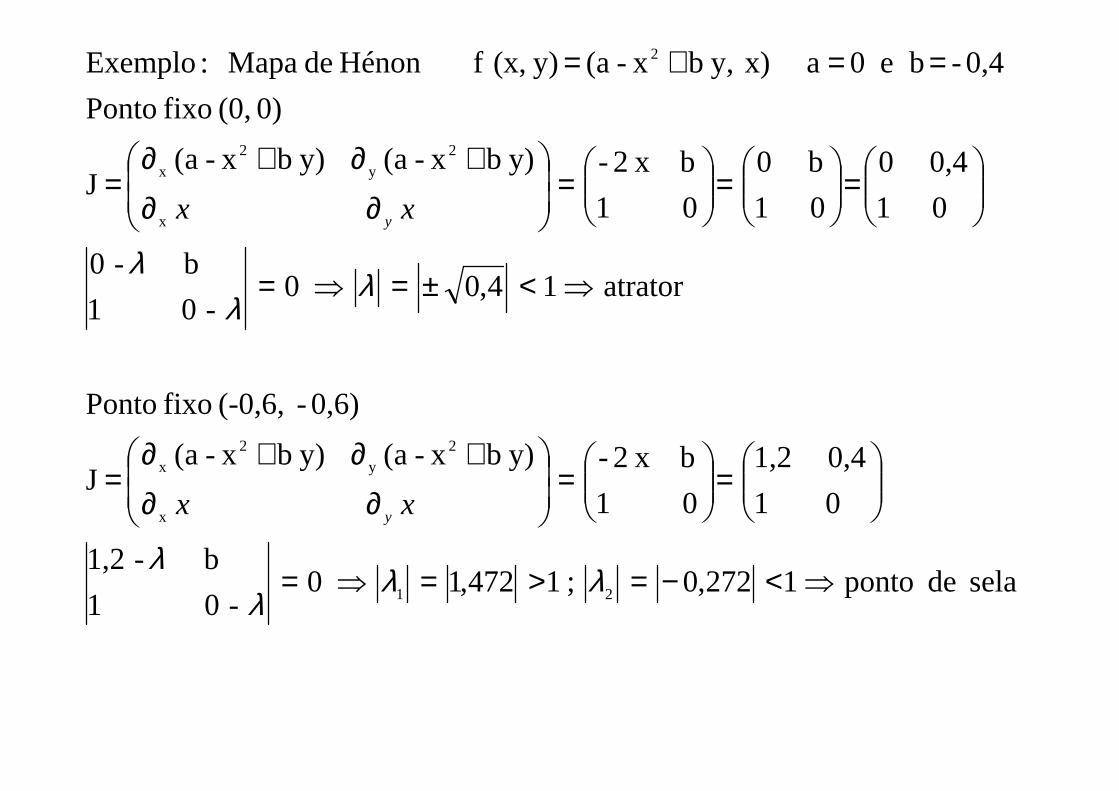
sela de ponto1272,0;1472,10-0 1
b -1,2
0 1
0,4 1,2
0 1
b x 2-y) b x- a(y) b x- a( J
0,6)- (-0,6, fixo Ponto
atrator14,00-0 1
b -0
0 1
0,4 0
0 1
b 0
0 1
b x 2-y) b x- a(y) b x- a( J
0) (0, fixo Ponto
0,4- be0 a x) y, b x- (a y) (x, f Hénon de Mapa :Exemplo
21
x
2y
2x
x
2
y
2
x
2
⇒<−=>=⇒=
=
=
∂∂+∂+∂
=
⇒<±=⇒=
=
=
=
∂∂+∂+∂
=
==+=
λλλ
λ
λλ
λ
xx
xx
y
y
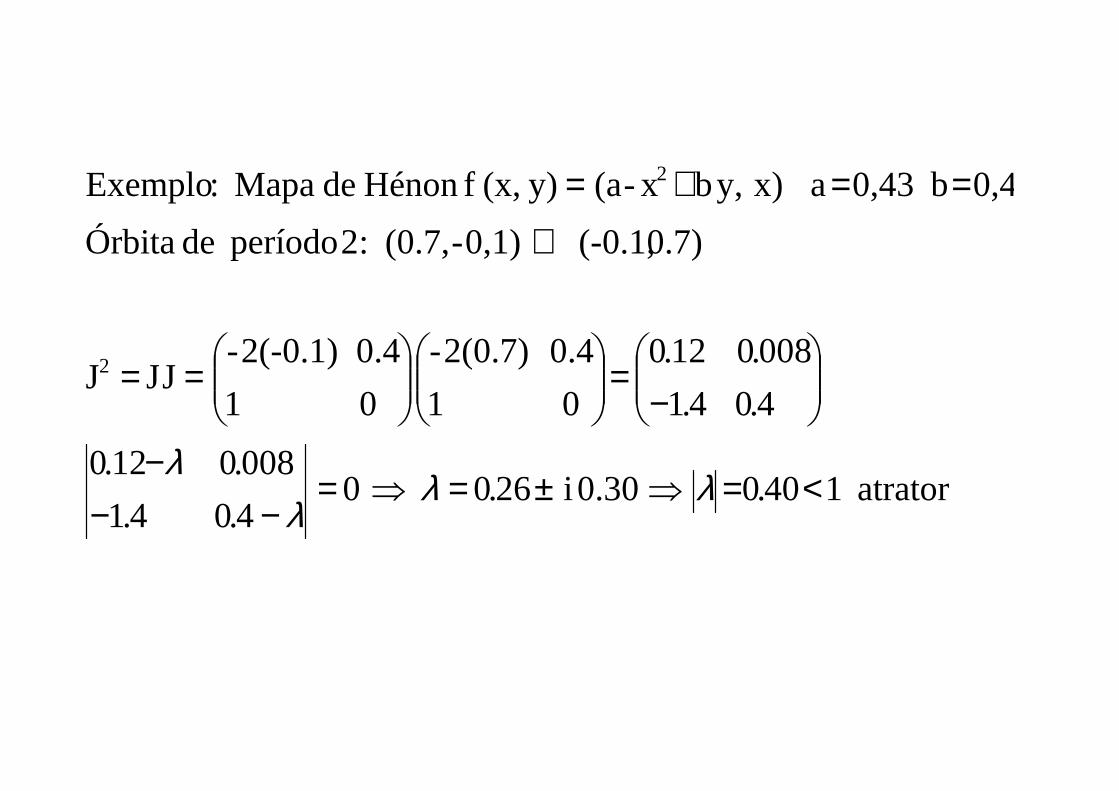
atrator140.00.30 i 26.004.04.1
008.012.0
4.04.1
008.012.0
0 1
0.4 2(0.7)-
0 1
0.4 2(-0.1)- JJJ
0.7) (-0.1, 0,1)- (0.7, : 2 período de Órbita
0,4 b 0,43 a x)y, b x- (a y) (x, fHénon de Mapa : Exemplo
2
2
<=⇒±=⇒=−−
−
−=
==
⇔==+=
λλλ
λ
Ciclos Limite
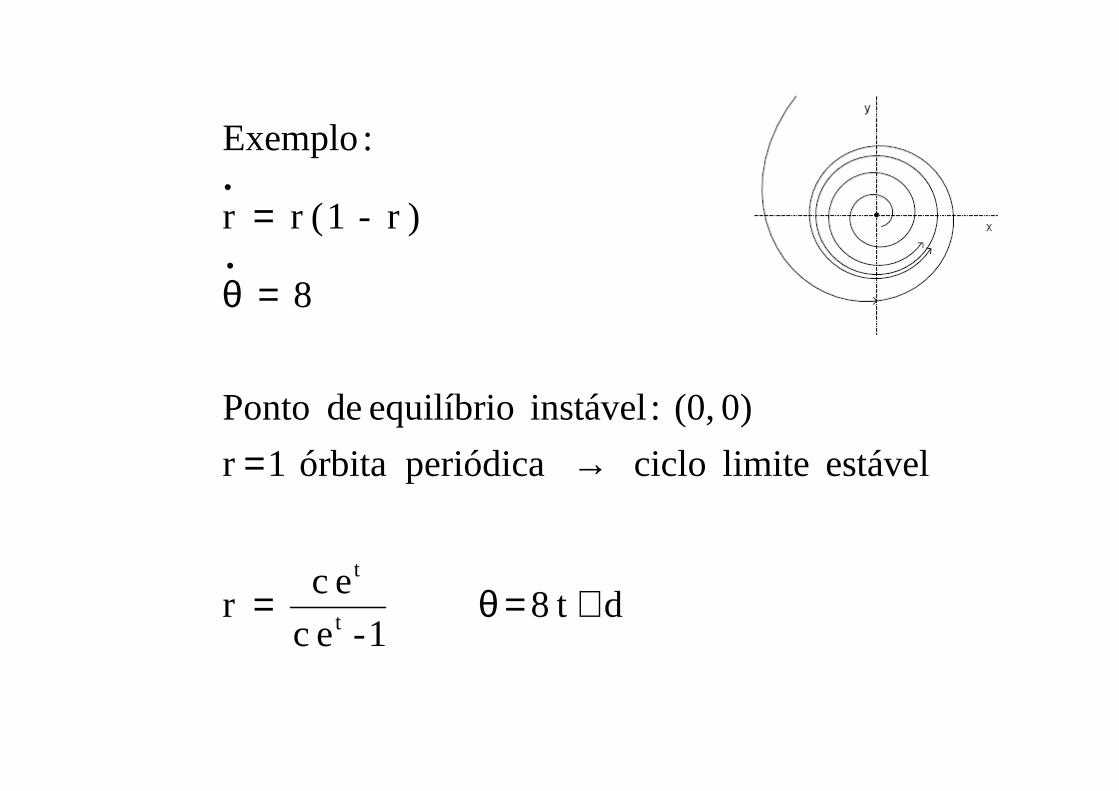
d t 8 1 - e c
e c r
estável limite ciclo periódica órbita 1 r
0) (0, : instável equilíbrio de Ponto
8
)r - 1 (r r
:Exemplo
t
t
+=θ=
→=
=θ
=•
•
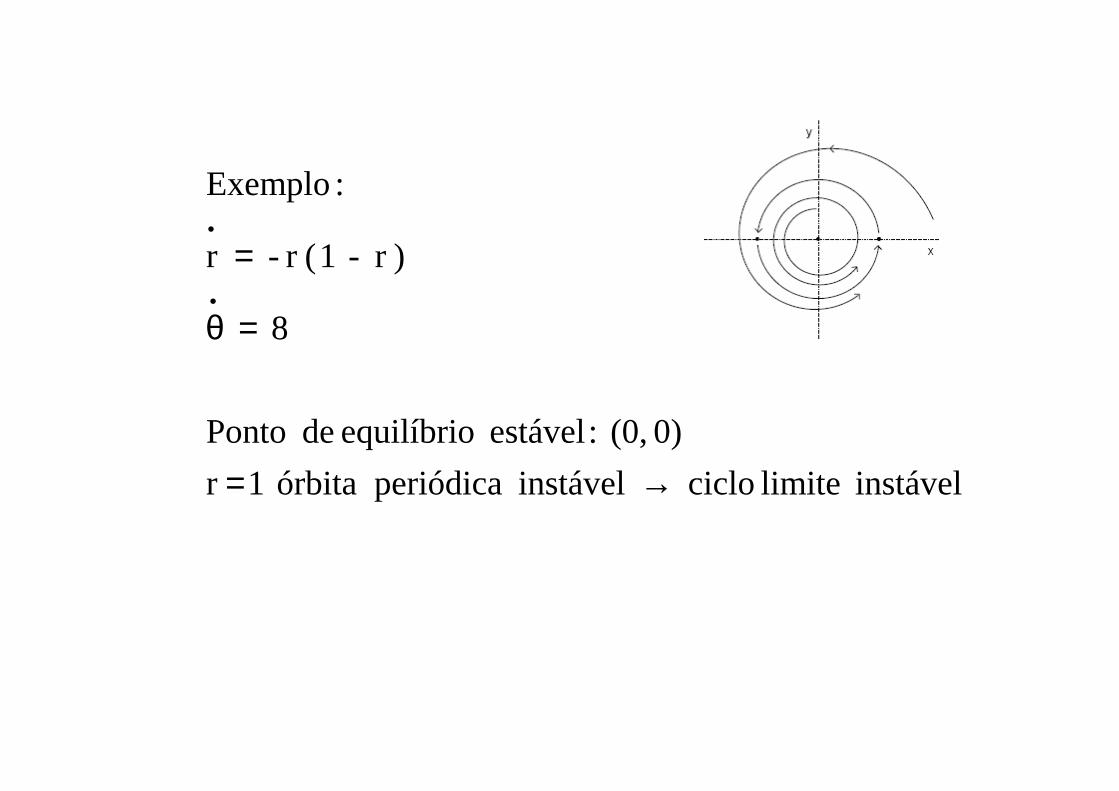
instável limite ciclo instável periódica órbita 1 r
0) (0, : estável equilíbrio de Ponto
8
)r - 1 (r - r
:Exemplo
→=
=θ
=•
•
vazioconjunto :} { )(x 0, xPara
{0} )(x ,0 xPara
{a} )(x 0, xPara
a xe 0 x :equilíbrio de Pontos
0 a , ) x - a ( x x
Exemplo
00
00
00
=ω<=ω==ω>
==>=
•
0r ; a} {r ) , r(
{0} ) 0(
estável equilíbrio de ponto é mOrige
b
)r - a (r r
Exemplo
000 ≠==θω=ω
=θ
=•
•
) 0, a, ( ) , a(
0r ; a} {r ) , r(
{0} ) 0(
)0,0(
),a(
)0,a(
:equilíbrio de Pontos
) a r (sen
)r - a (r r
Exemplo
0
000
22
π=θ=θω≠∀==θω
=ω
π
−+θ=θ
=•
•
Bifurcações de Ciclos Limites
Sistemas bidimensionais
Estabilidade Estrutural
• Estabilidade da solução depende dos
parâmetros de controle.
• Mudança qualitativa na solução, com a
alteração de um parâmetro, caracteriza uma
bifurcação.
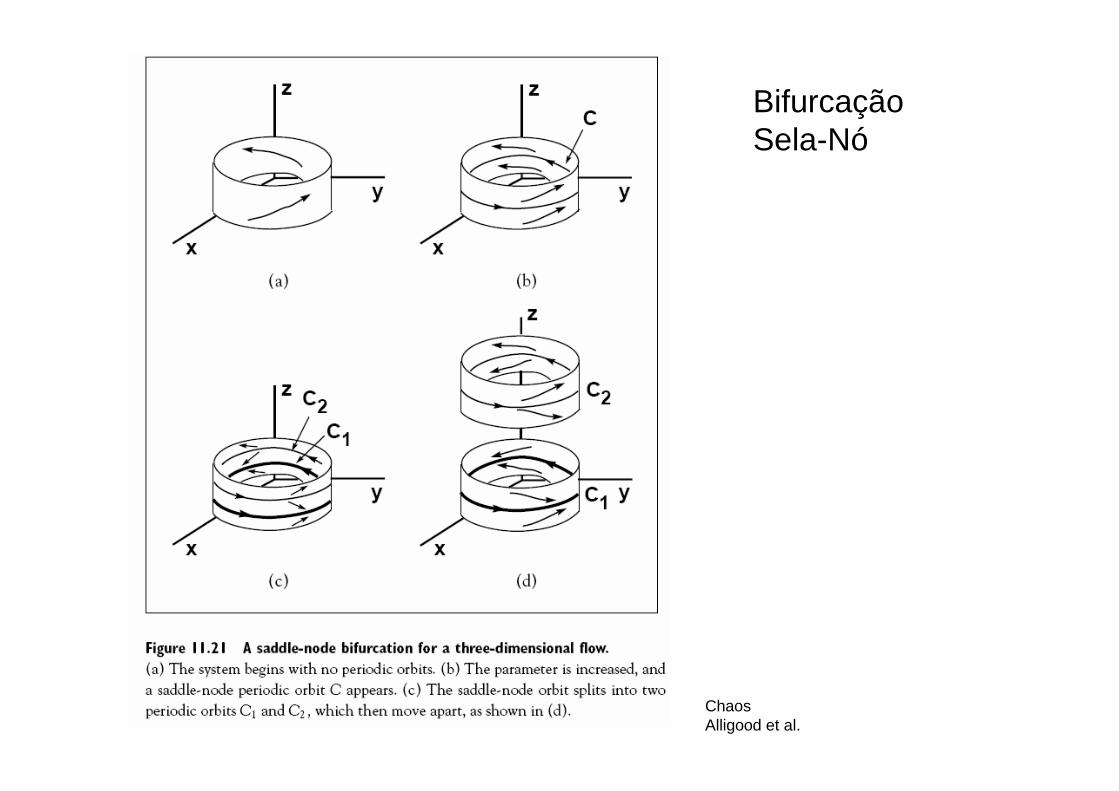
ChaosAlligood et al.
BifurcaçãoSela-Nó
ChaosAlligood et al.
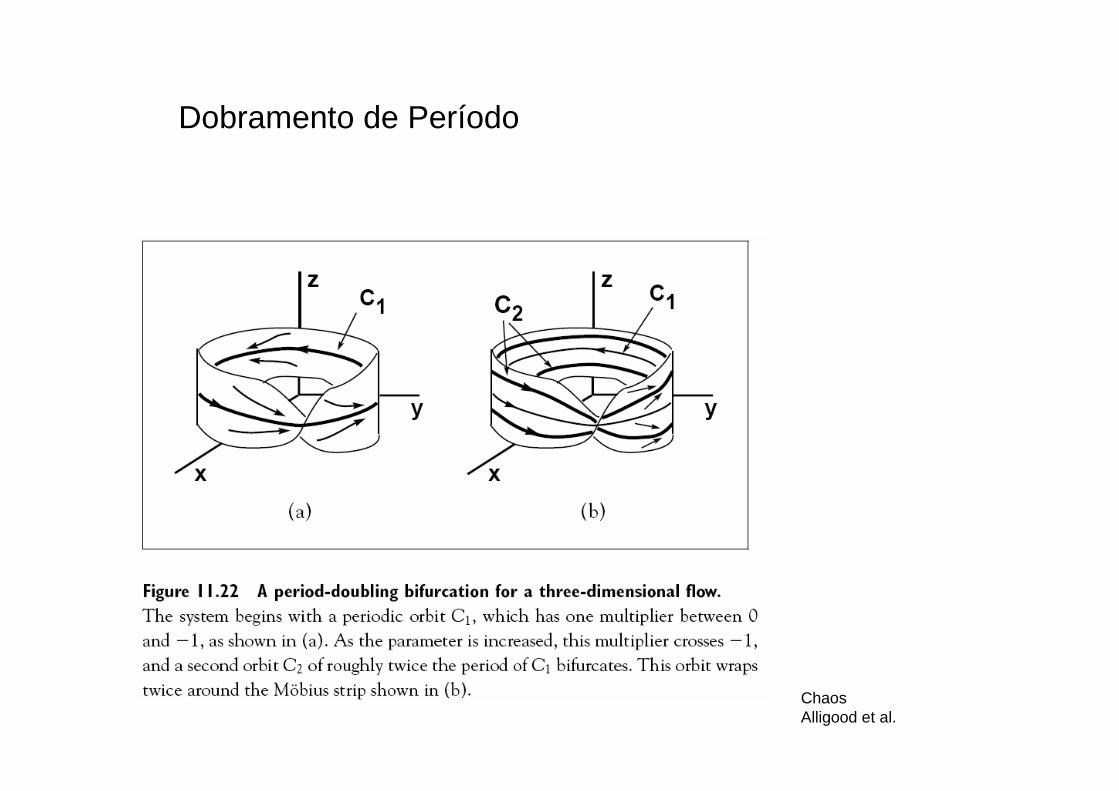
Dobramento de Período
ChaosAlligood et al.
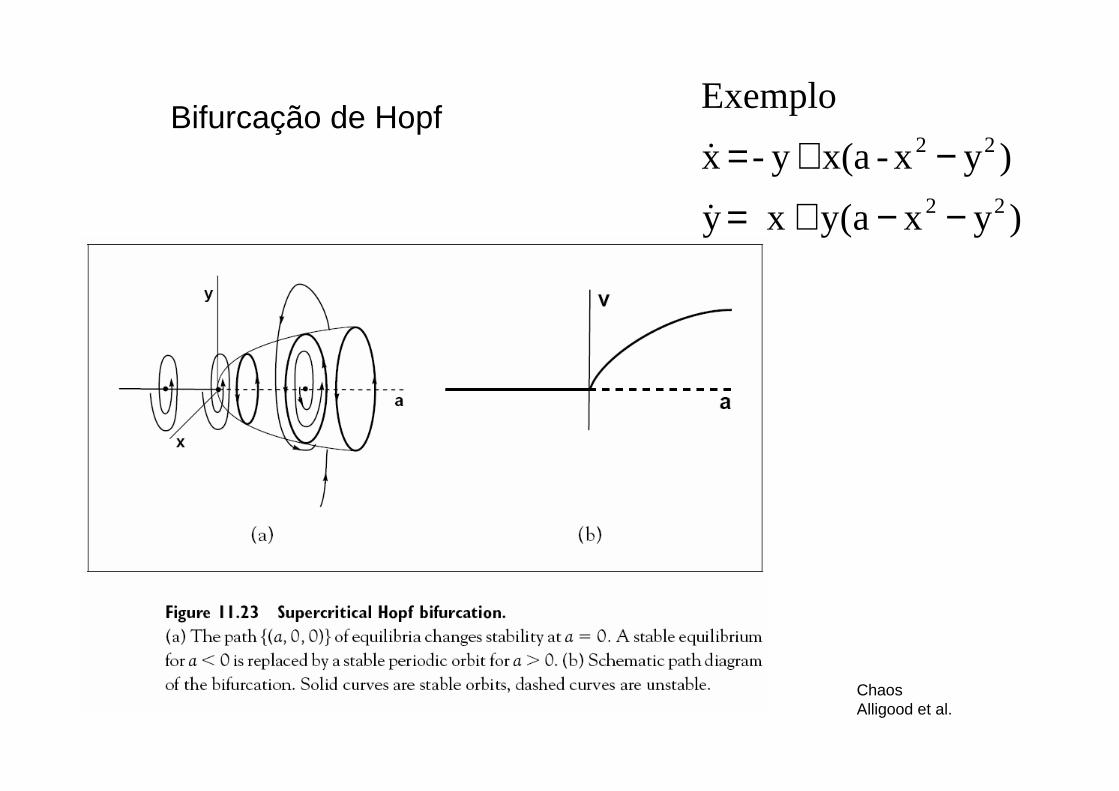
Bifurcação de Hopf
)yxa(yxy
)yx-x(ay-x
Exemplo
22
22
−−+=−+=
&
&
ChaosAlligood et al.
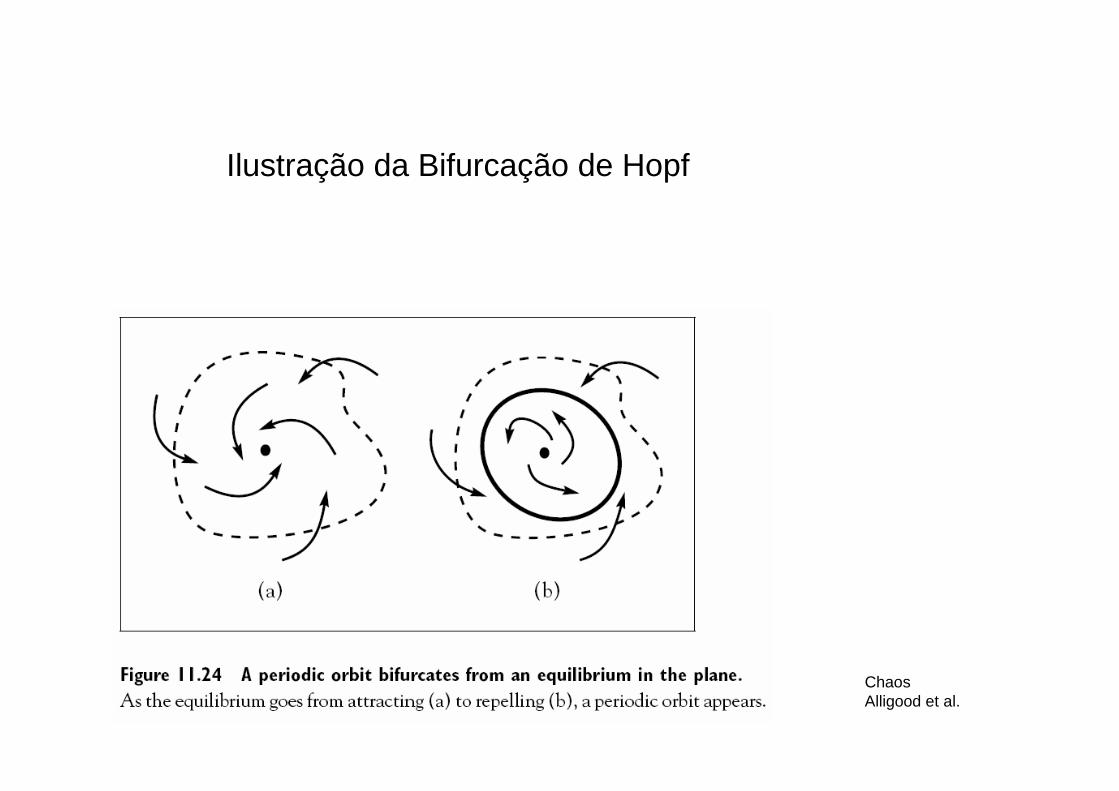
Ilustração da Bifurcação de Hopf
ChaosAlligood et al.
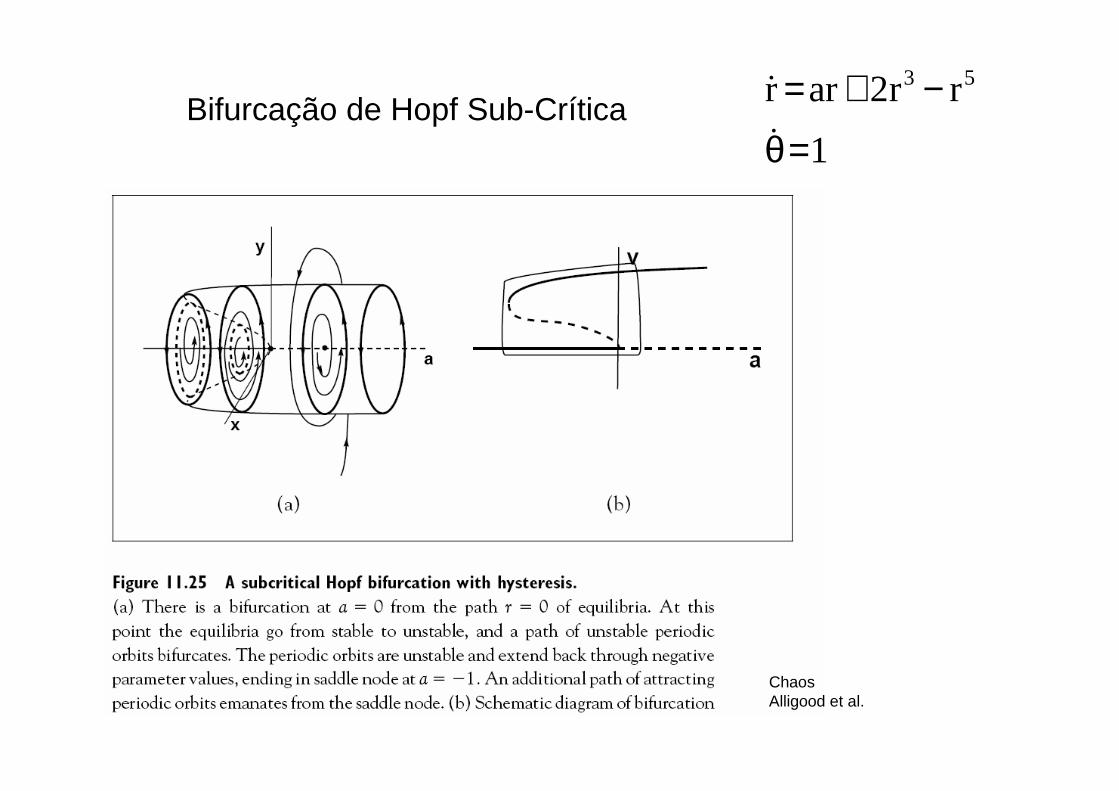
Bifurcação de Hopf Sub-Crítica1
rr2arr 53
=θ
−+=&
&
ChaosAlligood et al.
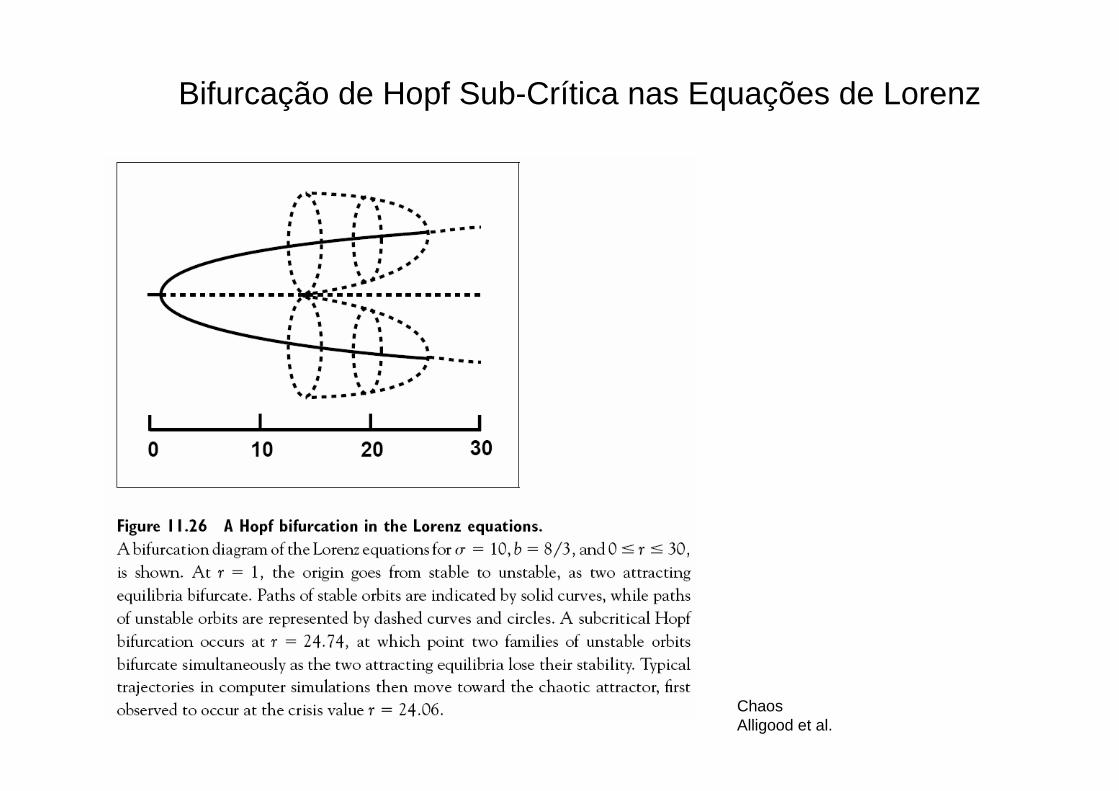
Bifurcação de Hopf Sub-Crítica nas Equações de Lorenz