ESTABILIDAD - materias.fi.uba.armaterias.fi.uba.ar/7609/material/S1000Estabilidad.pdf · Con el...
29
Serie 10 ESTABILIDAD
Transcript of ESTABILIDAD - materias.fi.uba.armaterias.fi.uba.ar/7609/material/S1000Estabilidad.pdf · Con el...
Serie 10
ESTABILIDAD
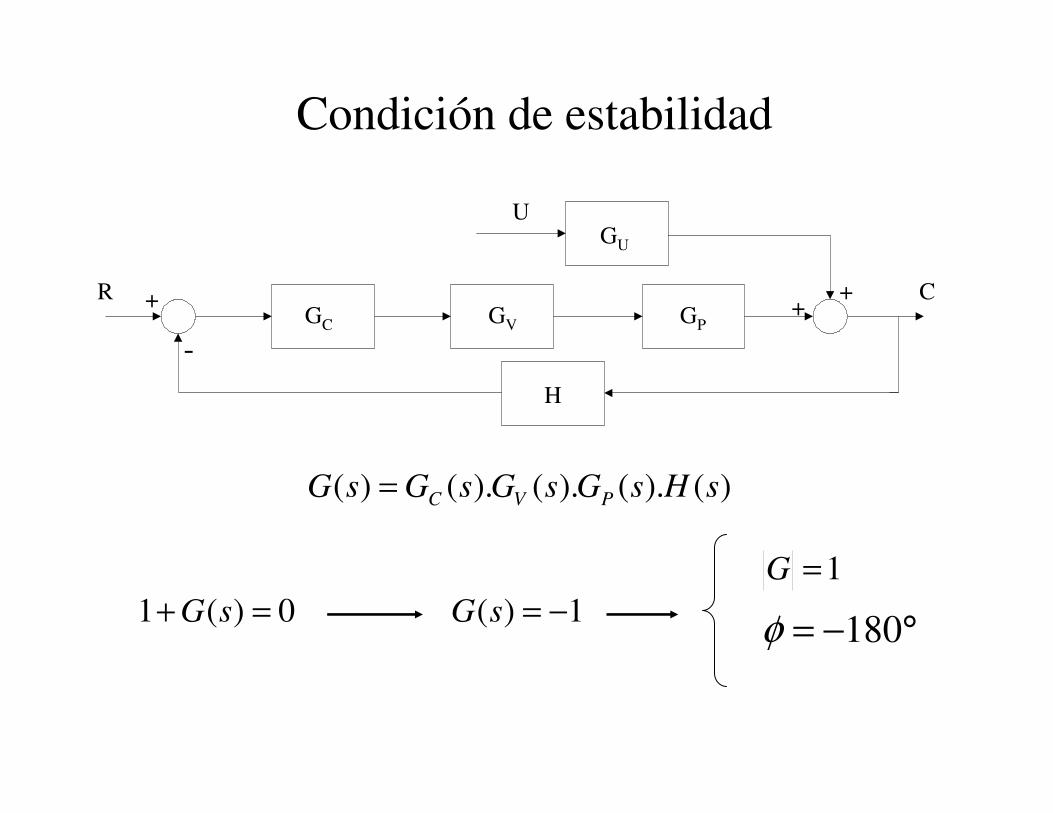
Condición de estabilidad
1=G
°−= 180φ1)( −=sG0)(1 =+ sG
)().().().()( sHsGsGsGsG PVC=
u
Kc Gv Gp
Gu
cr
H
GC
GU
H
GPGV
U
CR
-
+ ++
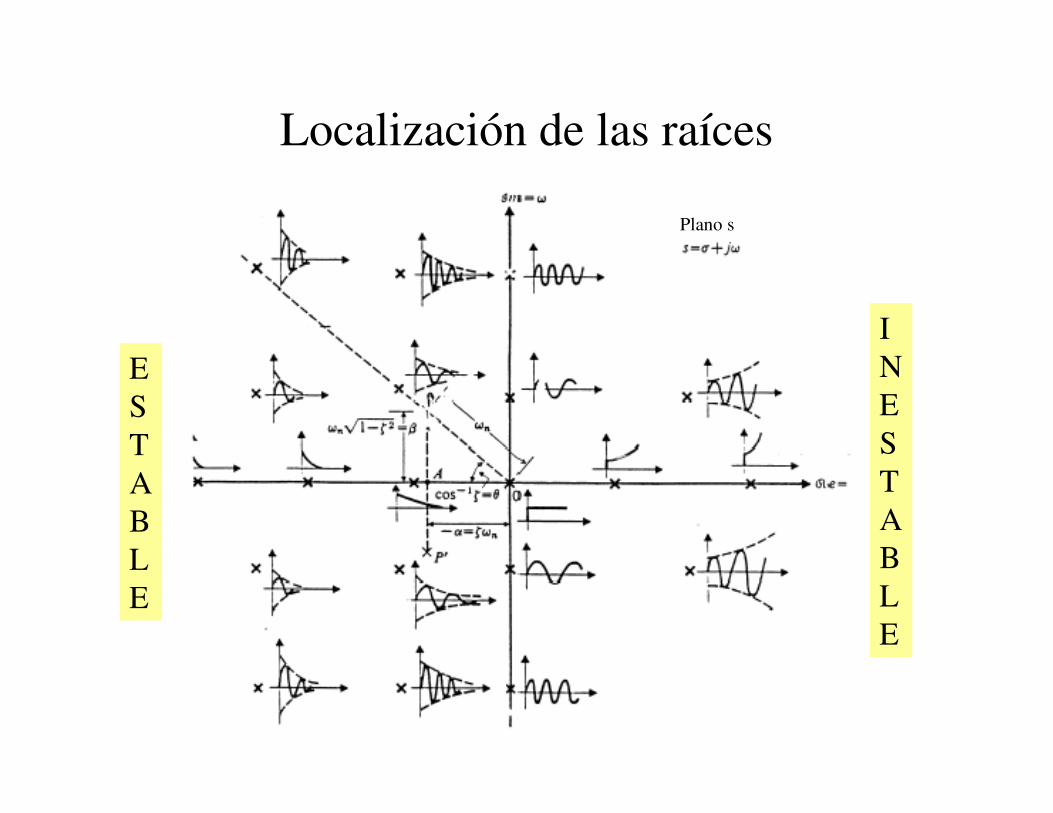
Localización de las raíces
Plano s
ESTABLE
INESTABLE
CRITERIOS DE ESTABILIDAD
Routh – Hurwitz
Bode
Nyquist
Lugar de las raíces
Criterio de Routh-Hurwitz
Se llama polinomio característico al denominador de la funciónde transferencia G(s) de lazo cerrado.Se llama ecuación característica al polinomio característico = 0.El polinomio debe tener los términos ordenados en potenciasdecrecientes de s. Es condición necesaria pero no suficiente paraque el sistema sea estable que el polinomio sea completo y quetodos los coeficientes sean positivos.
0⟩ia
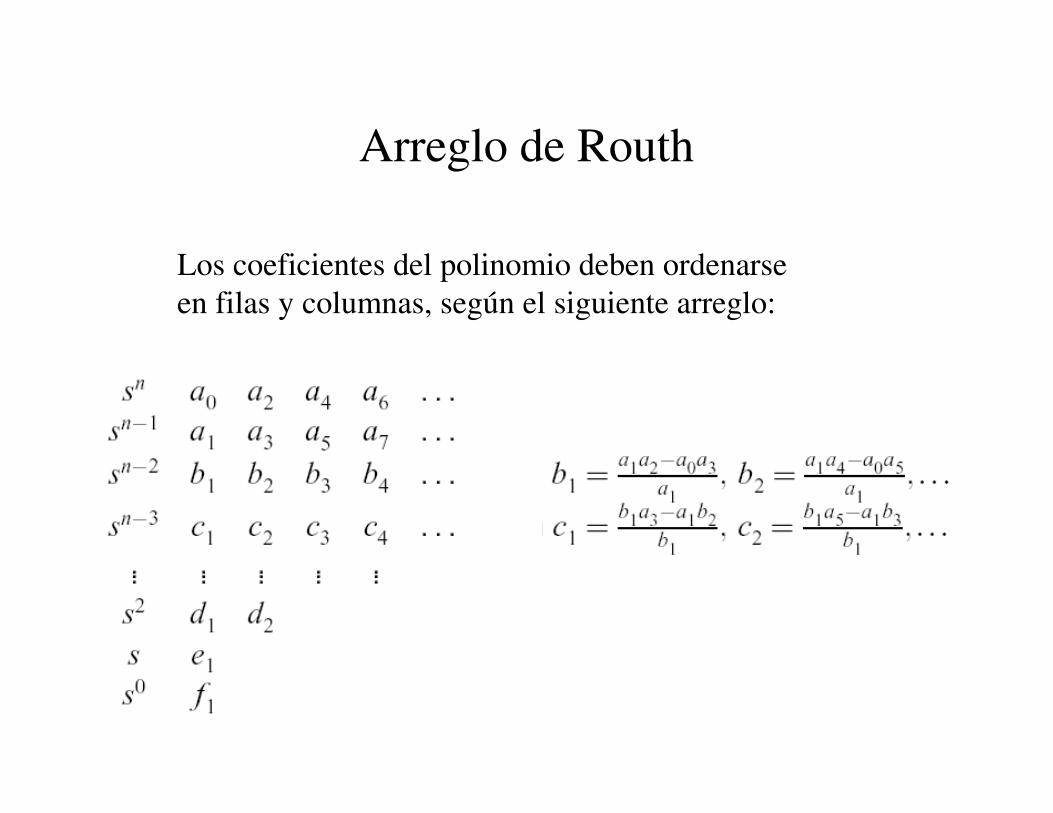
Arreglo de Routh
Los coeficientes del polinomio deben ordenarse en filas y columnas, según el siguiente arreglo:
Criterio de Routh-Hurwitz
Si alguno de los coeficientes es cero o negativo, entoncesexiste al menos una raíz imaginaria o con parte real positiva.El criterio de Routh-Hurwitz establece que el número de raícescon parte real positiva (semiplano derecho) es igual al númerode cambios de signo en la primera columna de la tabla.
Condición necesaria y suficiente de estabilidad de Routh:Un sistema será estable si y sólo si todos los elementos de laprimera columna del Arreglo de Routh son positivos.
Limitación: El criterio de Routh no puede aplicarse en sistemasque presentan retardos puros.
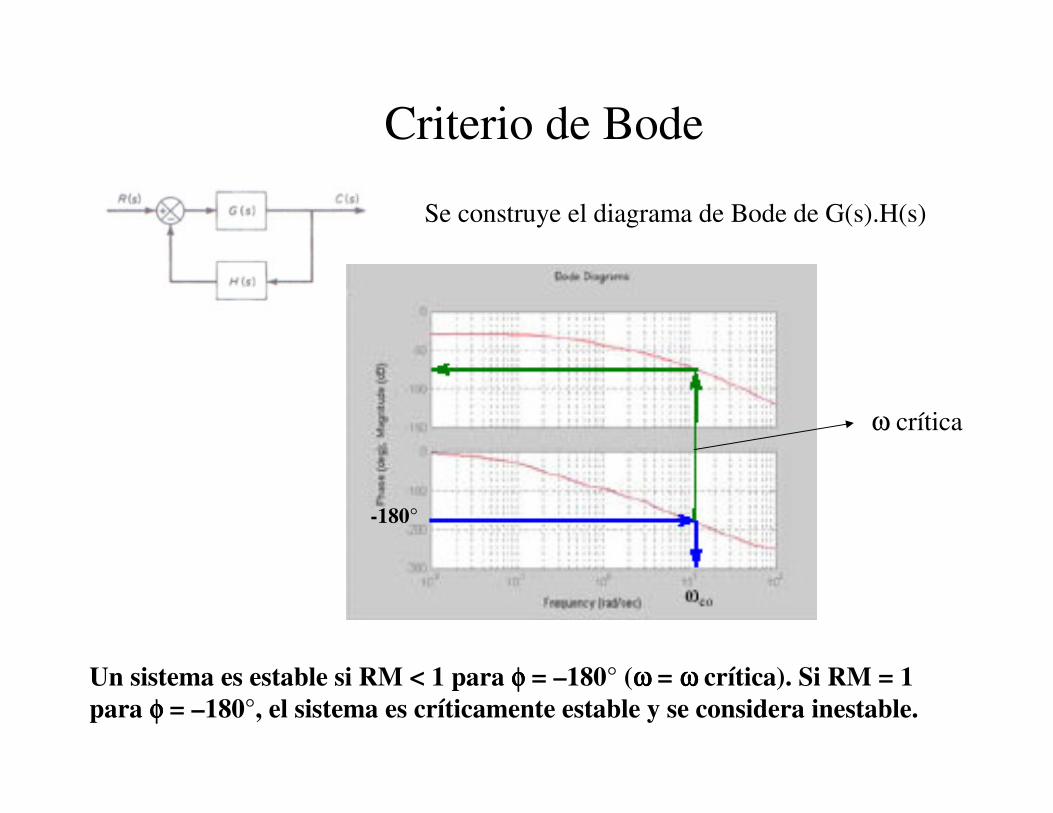
Criterio de Bode
Se construye el diagrama de Bode de G(s).H(s)
-180°
Un sistema es estable si RM < 1 para φφφφ = –180° (ωωωω = ωωωω crítica). Si RM = 1
para φφφφ = –180°, el sistema es críticamente estable y se considera inestable.
ω crítica
Margen de ganancia y Margen de fase
°== -180 para 1
φRM
MG
1RM para )180( =°−−=φMF
MG recomendado = 1.7
MF recomendado = 30°
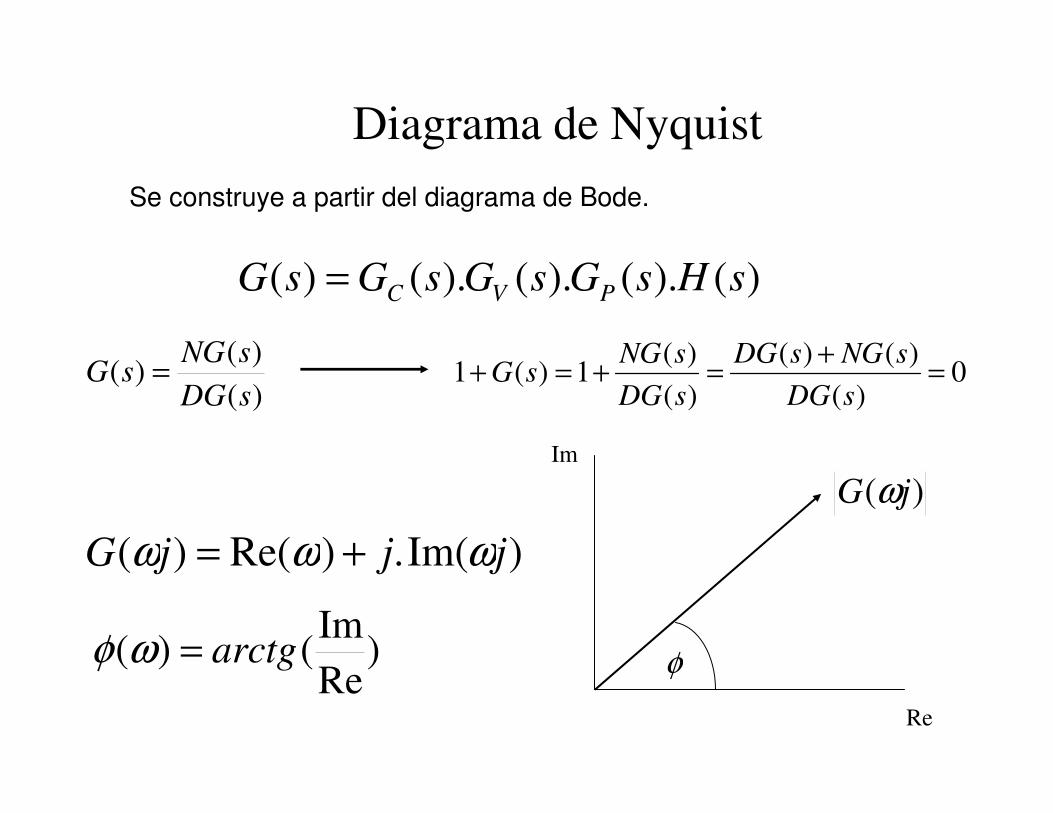
Diagrama de Nyquist
)Im(.)Re()( jjjG ωωω +=
Se construye a partir del diagrama de Bode.
)ReIm
()( arctg=ωφ
)( jG ω
φ
Im
Re
)()(
)(sDG
sNGsG = 0
)(
)()(
)(
)(1)(1 =
+=+=+
sDG
sNGsDG
sDG
sNGsG
)().().().()( sHsGsGsGsG PVC=
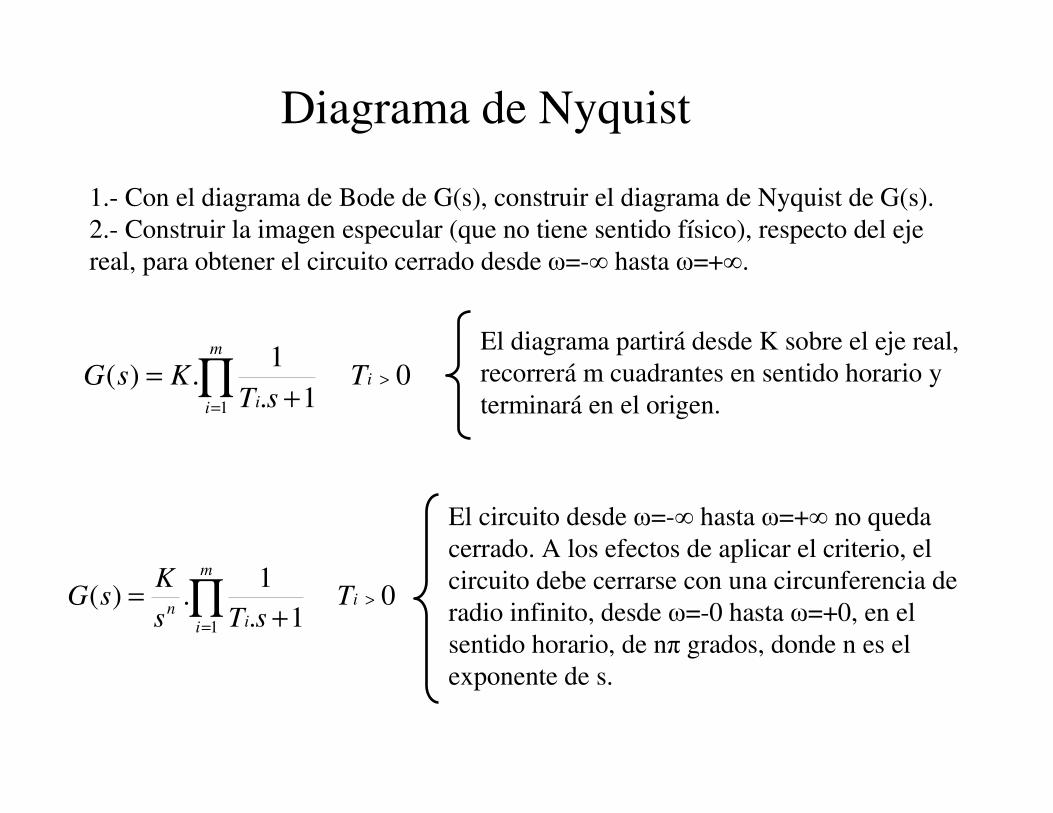
Diagrama de Nyquist
1.- Con el diagrama de Bode de G(s), construir el diagrama de Nyquist de G(s).2.- Construir la imagen especular (que no tiene sentido físico), respecto del eje real, para obtener el circuito cerrado desde ω=-∞ hasta ω=+∞.
0 1.
1.)(
1
>
=
∏+
= i
m
i i
TsT
KsG
El diagrama partirá desde K sobre el eje real, recorrerá m cuadrantes en sentido horario y terminará en el origen.
El circuito desde ω=-∞ hasta ω=+∞ no queda cerrado. A los efectos de aplicar el criterio, el circuito debe cerrarse con una circunferencia de radio infinito, desde ω=-0 hasta ω=+0, en el sentido horario, de nπ grados, donde n es el exponente de s.
0 1.
1.)(
1
>
=
∏+
= i
m
i in
TsTs
KsG
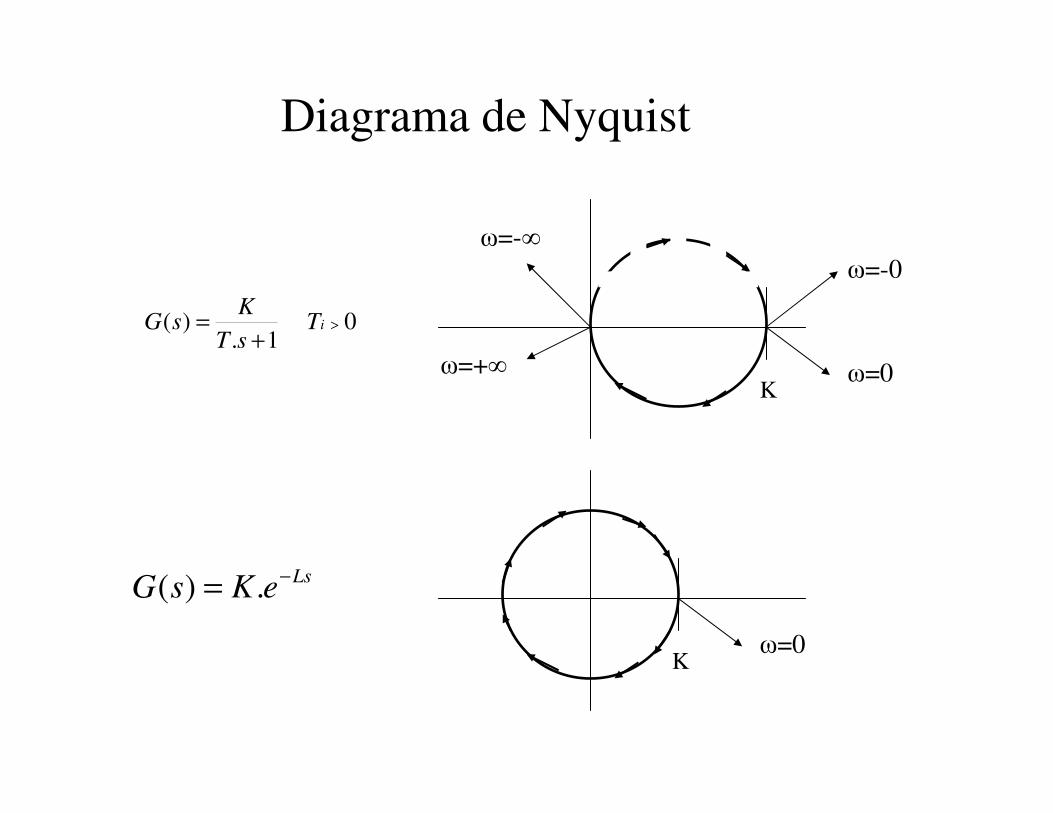
Diagrama de Nyquist
ω=+∞
ω=-∞ω=-0
ω=0
0 1.
)( >
+= iT
sT
KsG
K
ω=0
LseKsG
−= .)(
K
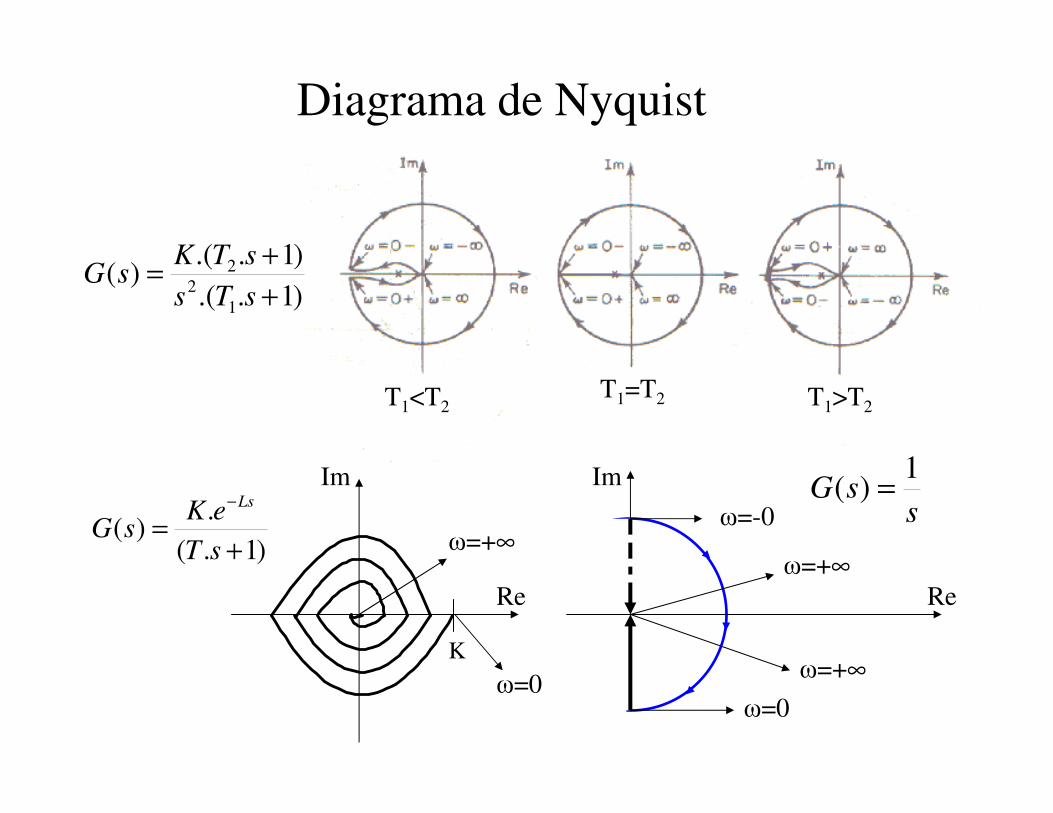
Diagrama de Nyquist
)1..()1..(
)(1
22
+
+=
sTs
sTKsG
T1<T2T1=T2 T1>T2
1
)(s
sG =
ω=0
ω=-0
ω=+∞
ω=+∞
Im
Re
Im
Re
)1.(.
)(+
=−
sT
eKsG
Ls
K
ω=0
ω=+∞
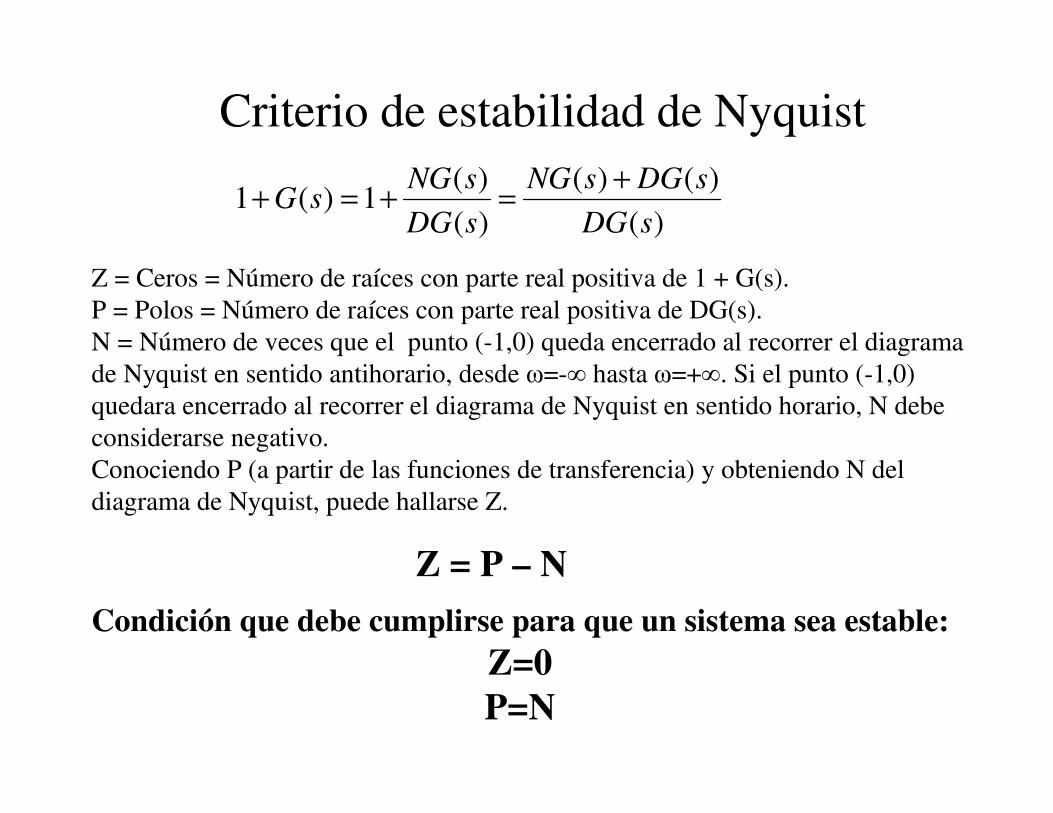
Z = Ceros = Número de raíces con parte real positiva de 1 + G(s).P = Polos = Número de raíces con parte real positiva de DG(s).N = Número de veces que el punto (-1,0) queda encerrado al recorrer el diagramade Nyquist en sentido antihorario, desde ω=-∞ hasta ω=+∞. Si el punto (-1,0) quedara encerrado al recorrer el diagrama de Nyquist en sentido horario, N debeconsiderarse negativo. Conociendo P (a partir de las funciones de transferencia) y obteniendo N del diagrama de Nyquist, puede hallarse Z.
Criterio de estabilidad de Nyquist
Condición que debe cumplirse para que un sistema sea estable:
Z=0
P=N
Z = P – N
)(
)()(
)(
)(1)(1
sDG
sDGsNG
sDG
sNGsG
+=+=+
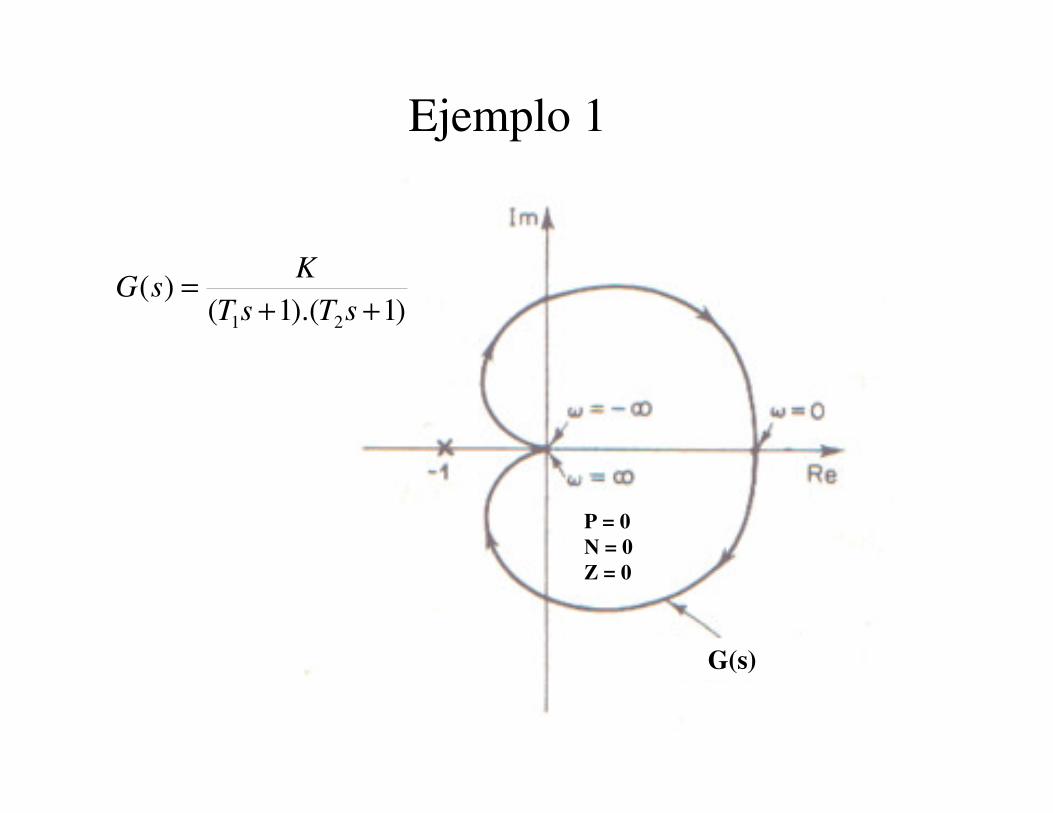
Ejemplo 1
G(s)
)1).(1()(
21 ++=
sTsT
KsG
P = 0
N = 0
Z = 0
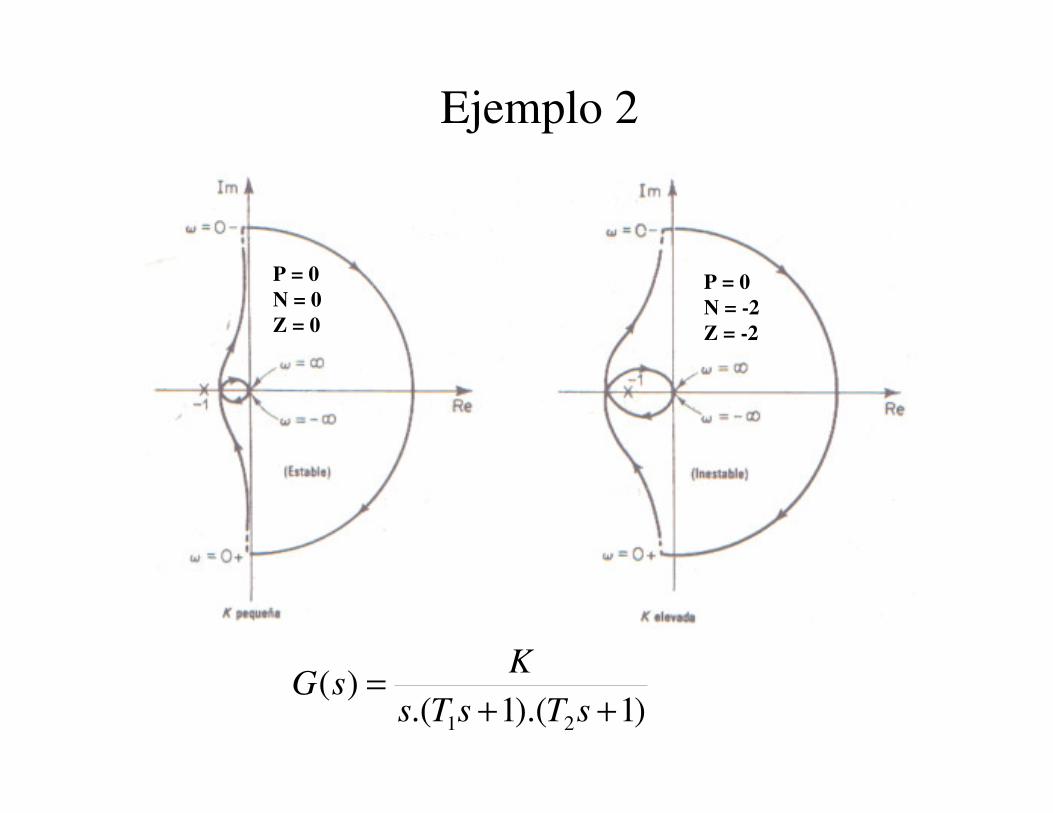
Ejemplo 2
)1).(1.()(
21 ++=
sTsTs
KsG
P = 0
N = 0
Z = 0
P = 0
N = -2
Z = -2
Método del lugar de las raíces
Se trata de representar gráficamente la variación del valor de las raíces de 1+G(s) con la variación de KC en un plano Im vs. Re.Se aplican una serie de reglas para poder construir la curva de raíces sin necesidad deresolver la ecuación.Sean zi los ceros (raíces de NG(s) = 0)Sean pi los polos (raíces de DG(s) = 0)Las reglas aplican si se cumplen las siguientes condiciones:El grado del polinomio del denominador (n) debe ser mayor que el del numerador (m).El sistema debe tener realimentación negativa.Como notación gráfica, se usan “x” para marcar los polos y “o” para marcar los ceros.
)()(
.)( 0sDG
sNGKsG = 0
)()(
.1 0 =+sDG
sNGK
)().().().()( sHsGsGsGsG PVC=
Método del lugar de las raíces
1)()(
.0 −=sDG
sNGK 1
)1(
)1(
.
1
10 −=
+
+
∏
∏
=
=
n
i
i
m
j
j
sT
sT
K
1)(
)(
.
1
1−=
−
−
∏
∏
=
=
n
i
i
m
j
j
ps
zs
K
=
∏
∏
=
=
n
i
i
m
j
j
T
T
KK
1
10
)(
)(
. dondeComplejo
1)(
)(
.
1
1=
−
−
∏
∏
=
=
n
i
i
m
j
j
ps
zs
K
,...3,2,1,0
)1.2.((1 1
±±±=
+=−−∑ ∑= =
r
rpzsm
j
n
i
ij πφ
Criterio de magnitud Criterio de ángulo
Reglas para usar el método
Regla 1: El número de ramas o lugares es igual al número de polos (n).Regla 2: Las ramas comienzan en los polos y terminan en los ceros. Lasterminaciones de las n-m ramas de las curvas ocurrirán en ceros en el infinito. En el caso de polo múltiple, emergerán del mismo tantas ramas como multiplicidad tenga. En el caso de cero múltiple, terminarán en el mismo tantas ramas como sea su multiplicidad. Regla 3: El eje real es parte de la curva de raíces cuando la suma del número de ceros y polos a la derecha de un punto sobre el eje real es impar. Esta regla es sólo válida para polos y ceros sobre el eje real (los ceros y polos complejos cancelan sus efectos). Por otra parte, cada polo o cero múltiple debe ser contado tantas veces como sea su multiplicidad.Regla 4: Existirán n-m ramas que aproximarán (a medida que K tienda a infinito) en forma asintótica a n-m líneas rectas que nacen en el centro de gravedad de polos y ceros. El centro de gravedad está dado por:
mn
zpn
i
m
j
ji
−
−
=∑ ∑
= =1 1γ
Reglas para usar el método
Regla 5: El punto en el cual emergen las ramas de la curva de raíces del eje real está dado por la siguiente ecuación:
∑∑== −
=−
n
i i
m
j j pszs 11
11
Las ramas salen o entran al eje real con ángulos de +/- 90°.
Regla 6: Las asíntotas definidas en la regla 4 forman ángulos con el eje real:
mn
k
−
+=Ψ
)12(π
y por lo tanto estarán espaciadas 180°/(n-m) unas de otras.
1)-m-(n 3,..., 2, ,1=k
Se pueden hacer más reglas para la construcción de curvas de raíces, perolas enunciadas son las de mayor y más común utilidad.
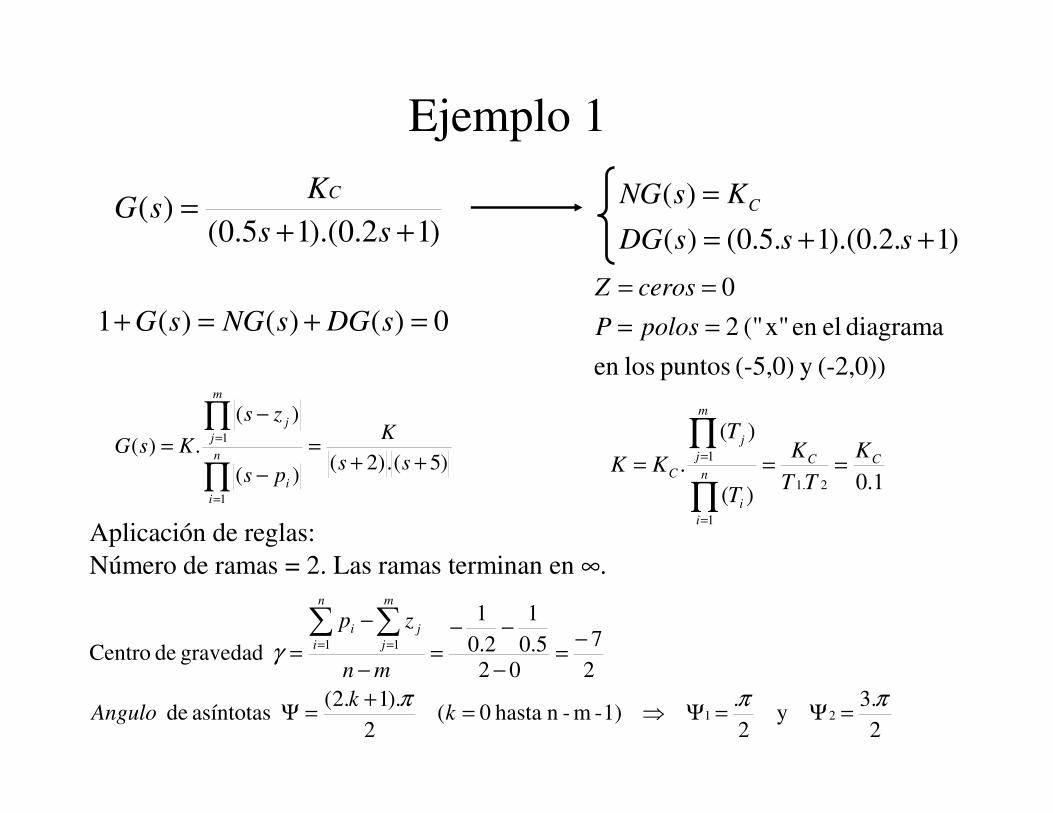
Ejemplo 1
)12.0).(15.0()(
++=
ss
KsG
C
)1.2.0).(1.5.0()(
)(
++=
=
sssDG
KsNG C
(-2,0))y (-5,0) puntos losen
diagrama elen x"(" 2
0
==
==
polosP
cerosZ
0)()()(1 =+=+ sDGsNGsG
Aplicación de reglas:Número de ramas = 2. Las ramas terminan en ∞.
2.3
y 2.
1)-m-n hasta 0( 2
).1.2( asíntotas de
27
025.0
12.0
1
gravedad de Centro
21
1 1
πππ
γ
=Ψ=Ψ⇒=+
=Ψ
−=
−
−−=
−
−
=∑ ∑
= =
kk
Angulo
mn
zpn
i
m
j
ji
1.0)(
)(
.2.1
1
1 CC
n
i
i
m
j
j
C
K
TT
K
T
T
KK ===
∏
∏
=
=)5(.)2()(
)(
.)(
1
1
++=
−
−
=
∏
∏
=
=
ss
K
ps
zs
KsGn
i
i
m
j
j
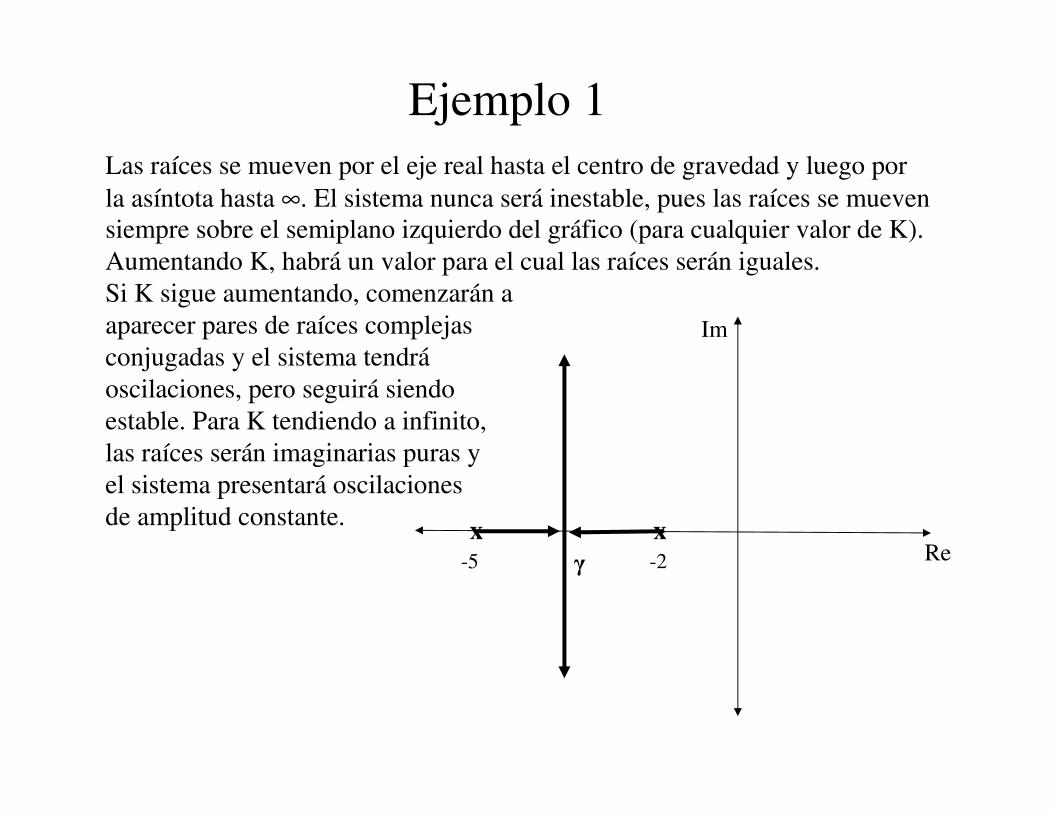
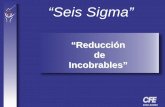
Ejemplo 1Las raíces se mueven por el eje real hasta el centro de gravedad y luego porla asíntota hasta ∞. El sistema nunca será inestable, pues las raíces se muevensiempre sobre el semiplano izquierdo del gráfico (para cualquier valor de K).Aumentando K, habrá un valor para el cual las raíces serán iguales. Si K sigue aumentando, comenzarán aaparecer pares de raíces complejasconjugadas y el sistema tendráoscilaciones, pero seguirá siendoestable. Para K tendiendo a infinito,las raíces serán imaginarias puras yel sistema presentará oscilacionesde amplitud constante.
Im
Rex x
γ-5 -2
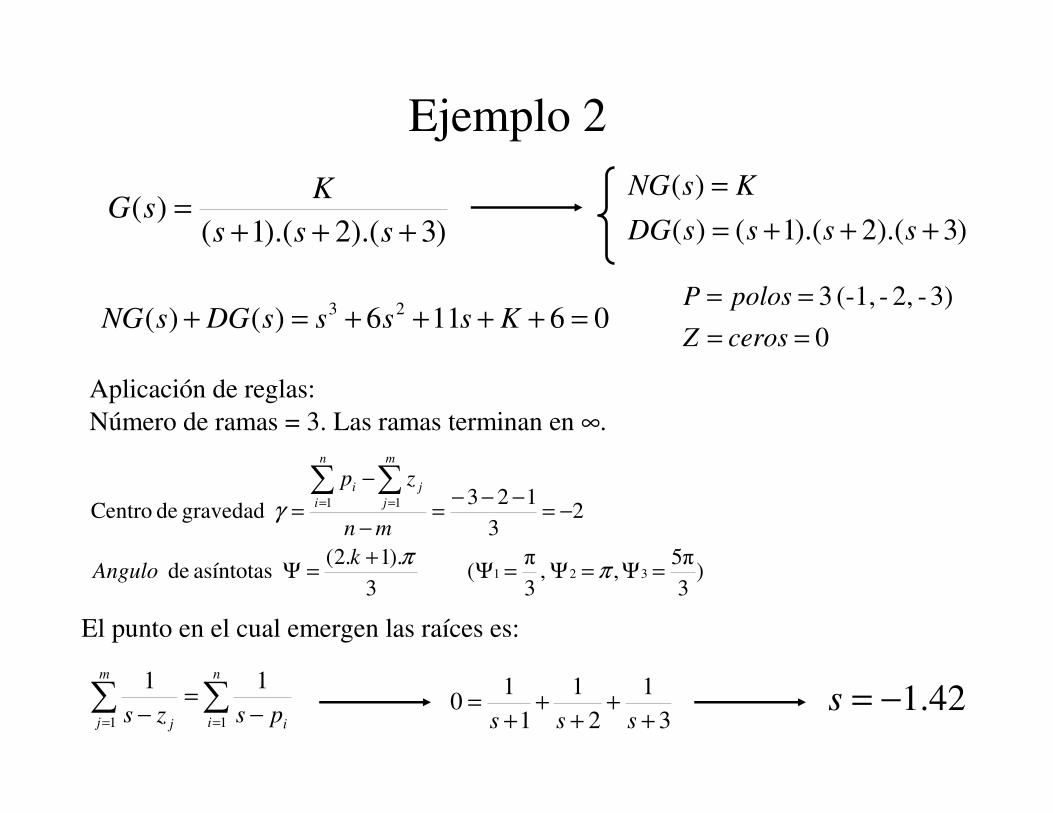
Ejemplo 2
)3).(2).(1()(
+++=
sss
KsG
)3).(2).(1()(
)(
+++=
=
ssssDG
KsNG
0
3)- 2,- (-1, 3
==
==
cerosZ
polosP
Aplicación de reglas:Número de ramas = 3. Las ramas terminan en ∞.
)3
5π, ,
3
π(
3
).1.2( asíntotas de
23
123 gravedad de Centro
321
1 1
=Ψ=Ψ=Ψ+
=Ψ
−=−−−
=−
−
=∑ ∑
= =
ππ
γ
kAngulo
mn
zpn
i
m
j
ji
El punto en el cual emergen las raíces es:
∑∑== −
=−
n
i i
m
j j pszs 11
11
31
21
11
0+
++
++
=sss
42.1−=s
06116)()( 23 =++++=+ KssssDGsNG
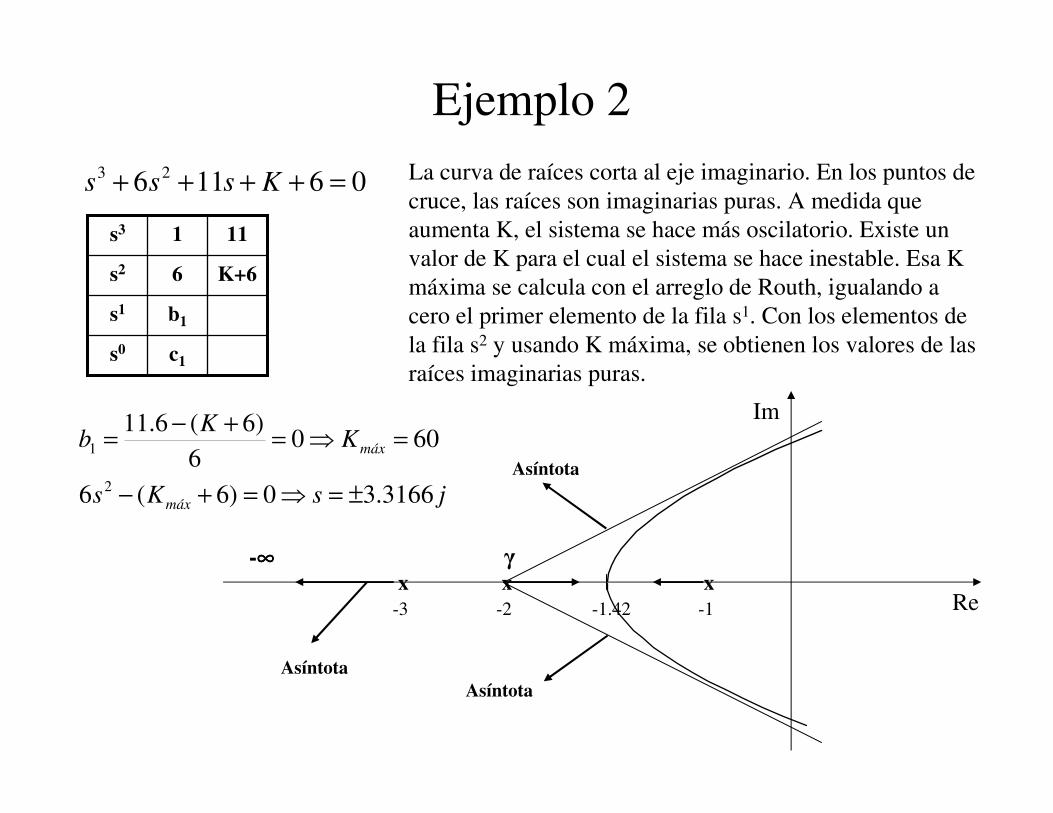
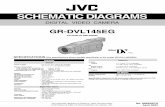
Ejemplo 2La curva de raíces corta al eje imaginario. En los puntos de cruce, las raíces son imaginarias puras. A medida que aumenta K, el sistema se hace más oscilatorio. Existe un valor de K para el cual el sistema se hace inestable. Esa K máxima se calcula con el arreglo de Routh, igualando a cero el primer elemento de la fila s1. Con los elementos de la fila s2 y usando K máxima, se obtienen los valores de las raíces imaginarias puras.
s0
s1
s2
s3
b1
c1
K+66
111
06116 23 =++++ Ksss
jsKs
KK
b
máx
máx
3166.30)6(6
6006
)6(6.11
2
1
±=⇒=+−
=⇒=+−
=Im
Rex x
-1.42-2 -1x
-3
γ-∞∞∞∞
Asíntota
Asíntota
Asíntota
AJUSTE DE CONTROLADORES
Dadas las dificultades crecientes encontradas con los métodos anteriores, aparecieronalgunos métodos empíricos de ajuste controladores:Método de lazo abierto (curva de reacción, Cohen - Coon)Método de lazo cerrado (oscilaciones sostenidas – Ziegler - Nichols)Método de las oscilaciones amortiguadasMétodo de los ajustes progresivosProducto de la ganancia última por la frecuencia críticaControl de modelo interno
Los ajustes son los valores óptimos de los parámetros del controlador, obtenidos en función del modo de control y del método aplicado. Teóricamente, son óptimos los valores de KC, TI y TD que hacen mínima alguna de las siguientes expresiones:
∫∞
=0
)( dtteIAE∫∞
=0
)( dtteIE ∫∞
=0
2 )( tdtteISE∫∞
=0
)( tdtteITAE
Para aplicar estos criterios, es necesario que el error se anule a tiempo infinito (TVF).Los ajustes dependen de la forma de la perturbación y del punto de ingreso de la misma.Los ajustes obtenidos por distintos métodos pueden ser diferentes.Los ajustes hallados muchas veces no son los mejores en planta.
MÉTODO DE LAZO CERRADO
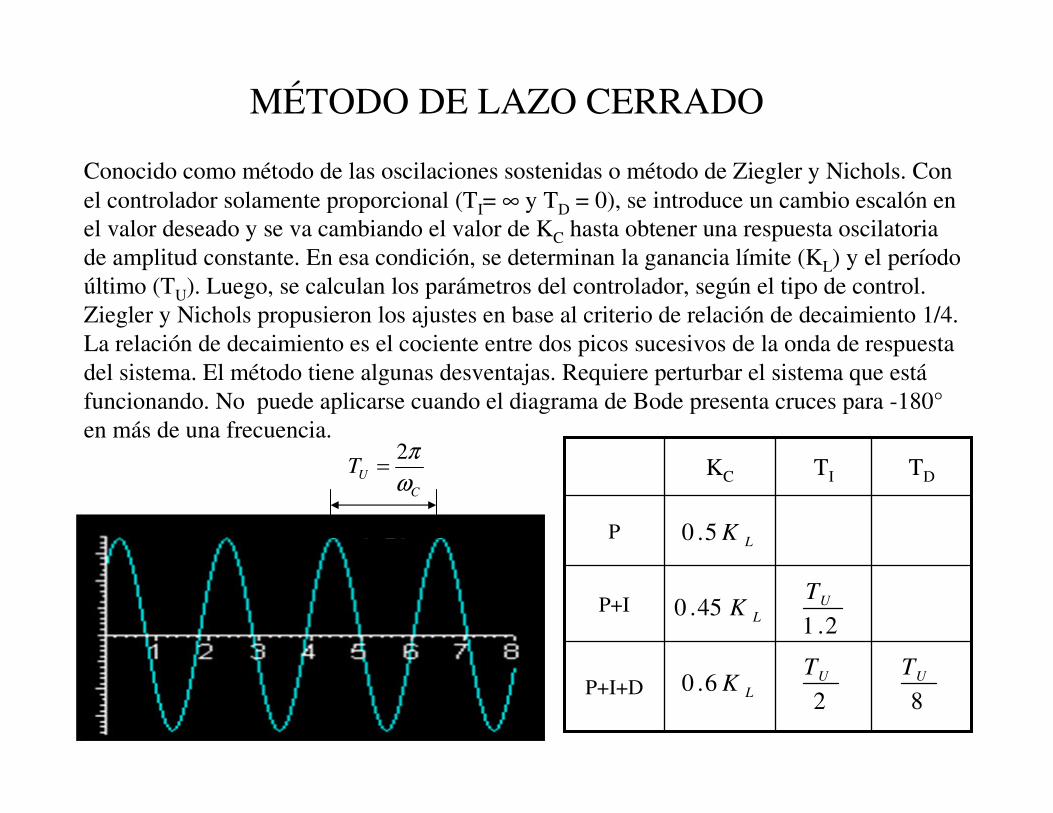
Conocido como método de las oscilaciones sostenidas o método de Ziegler y Nichols. Con el controlador solamente proporcional (TI= ∞ y TD = 0), se introduce un cambio escalón en el valor deseado y se va cambiando el valor de KC hasta obtener una respuesta oscilatoria de amplitud constante. En esa condición, se determinan la ganancia límite (KL) y el período último (TU). Luego, se calculan los parámetros del controlador, según el tipo de control.Ziegler y Nichols propusieron los ajustes en base al criterio de relación de decaimiento 1/4. La relación de decaimiento es el cociente entre dos picos sucesivos de la onda de respuesta del sistema. El método tiene algunas desventajas. Requiere perturbar el sistema que estáfuncionando. No puede aplicarse cuando el diagrama de Bode presenta cruces para -180°en más de una frecuencia.
P+I+D
P+I
P
TDTIKC
2UT
2.1UT
8UT
LK5.0
LK45.0
LK6.0
C
UTω
π2=
MÉTODO DE LAZO ABIERTO
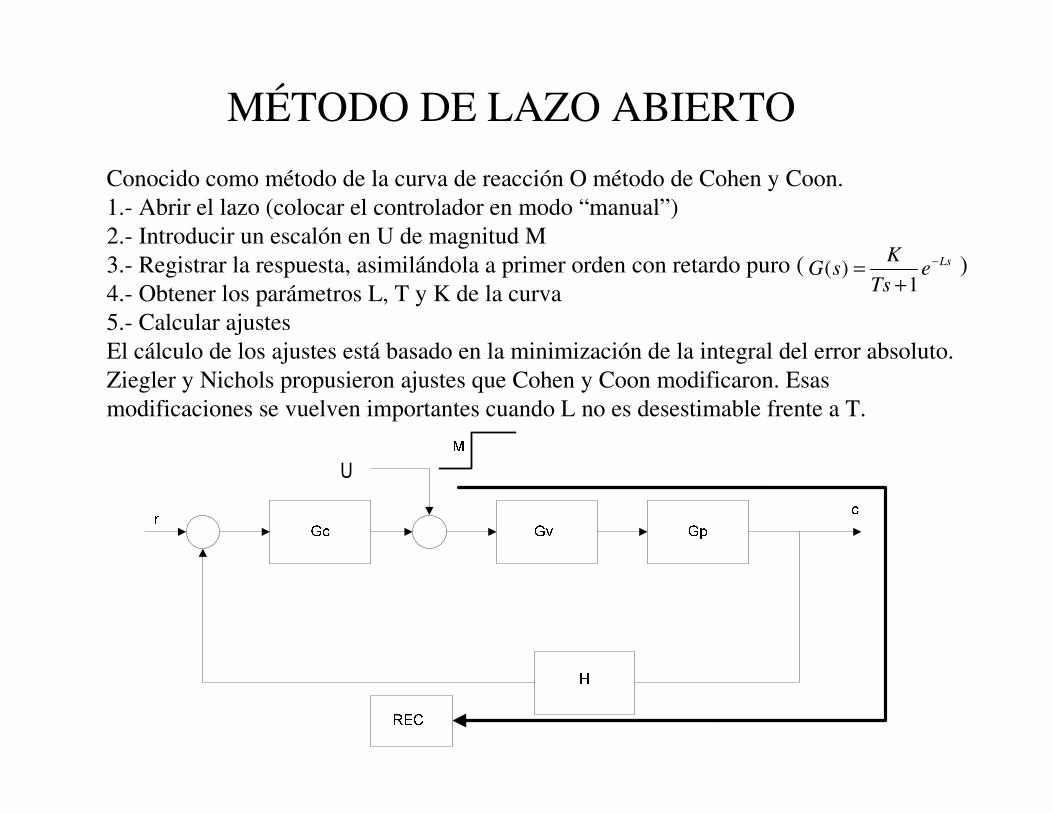
Conocido como método de la curva de reacción O método de Cohen y Coon.1.- Abrir el lazo (colocar el controlador en modo “manual”)2.- Introducir un escalón en U de magnitud M3.- Registrar la respuesta, asimilándola a primer orden con retardo puro ( )4.- Obtener los parámetros L, T y K de la curva5.- Calcular ajustesEl cálculo de los ajustes está basado en la minimización de la integral del error absoluto.Ziegler y Nichols propusieron ajustes que Cohen y Coon modificaron. Esasmodificaciones se vuelven importantes cuando L no es desestimable frente a T.
U
Lse
Ts
KsG
−
+=
1)(
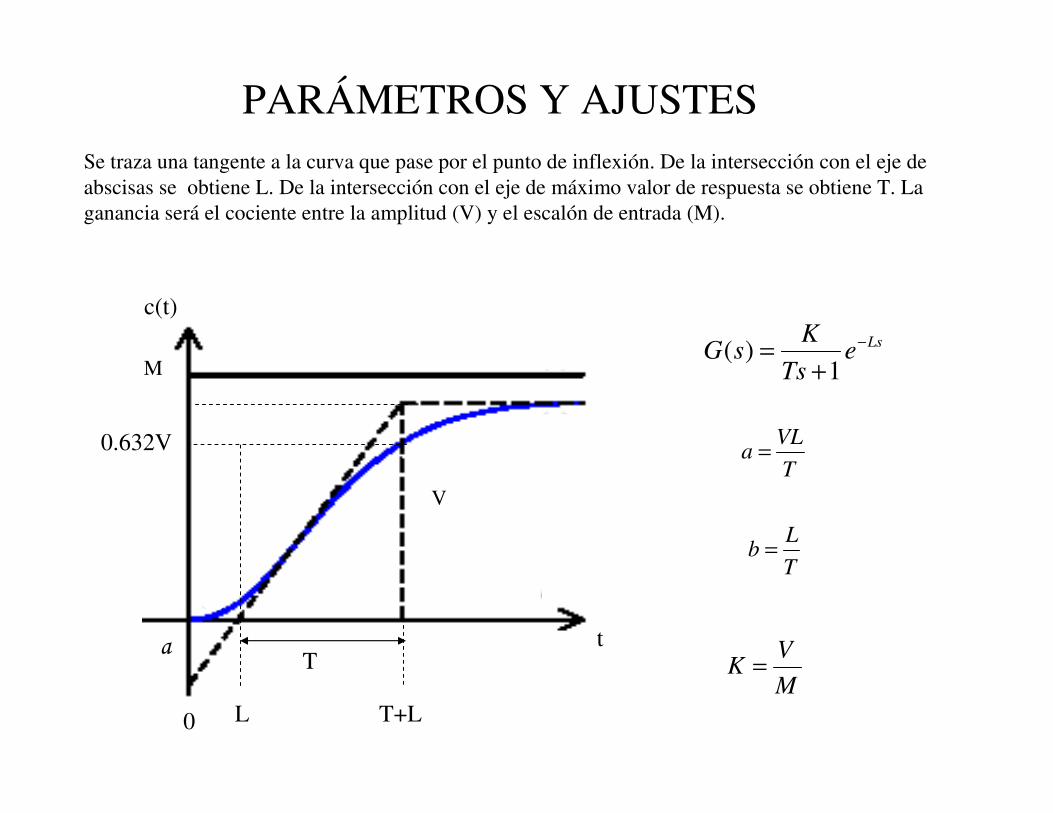
PARÁMETROS Y AJUSTESSe traza una tangente a la curva que pase por el punto de inflexión. De la intersección con el eje de abscisas se obtiene L. De la intersección con el eje de máximo valor de respuesta se obtiene T. La ganancia será el cociente entre la amplitud (V) y el escalón de entrada (M).
T
VLa =
M
VK =
M
c(t)
t
V
Lse
Ts
KsG
−
+=
1)(
T
Lb =
T+LL
T
0.632V
0
a
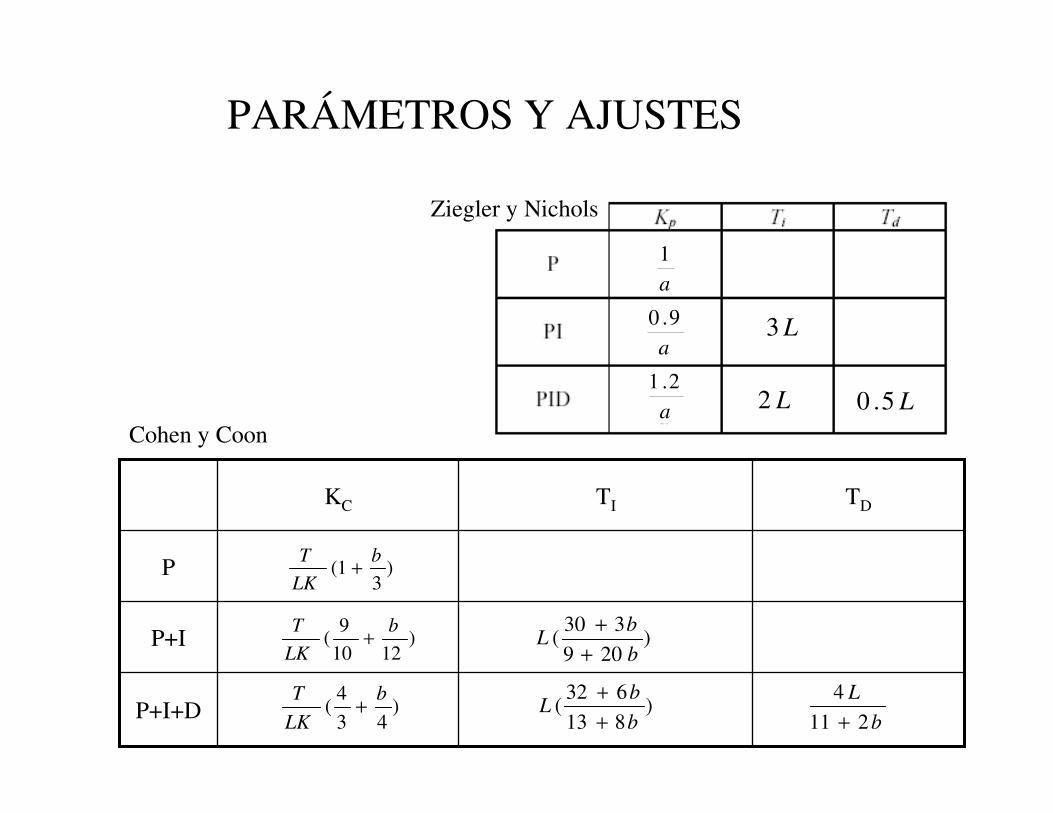
PARÁMETROS Y AJUSTES
a
1
a
9.0
a
2.1L5.0L2
L3
P+I+D
P+I
P
TDTIKC
)3
1(b
LK
T+
)1210
9(
b
LK
T+
)43
4(
b
LK
T+
)209
330(
b
bL
+
+
)813
632(
b
bL
+
+
b
L
211
4
+
Ziegler y Nichols
Cohen y Coon