Equilibrio De Traslación Y Rotación
25
Física para Arquitectura EQUILIBRIO DE TRASLACIÓN Y ROTACIÓN III° Mecánica
-
Upload
mauricio-alegria -
Category
Business
-
view
69.333 -
download
1
Transcript of Equilibrio De Traslación Y Rotación

Física para Arquitectura
EQUILIBRIO DE TRASLACIÓN Y
ROTACIÓN
III° Mecánica
• Diagrama de fuerzas sobre el cuerpo libre. Descripción cualitativa del equilibrio de traslación de un cuerpo.
• Primera condición de equilibrio (ΣF = 0). Caso de fuerzas en una y dos dimensiones. Torque y segunda condición de equilibrio (Σ t = 0).
Diagramas de Cuerpo Libre
• Un diagrama de cuerpo libre o diagrama de cuerpo aislado debe mostrar todas las fuerzas externas que actúan sobre el cuerpo. Es fundamental que el diagrama de cuerpo libre esté correcto antes de aplicar la Segunda ley de Newton, ΣFext = ma
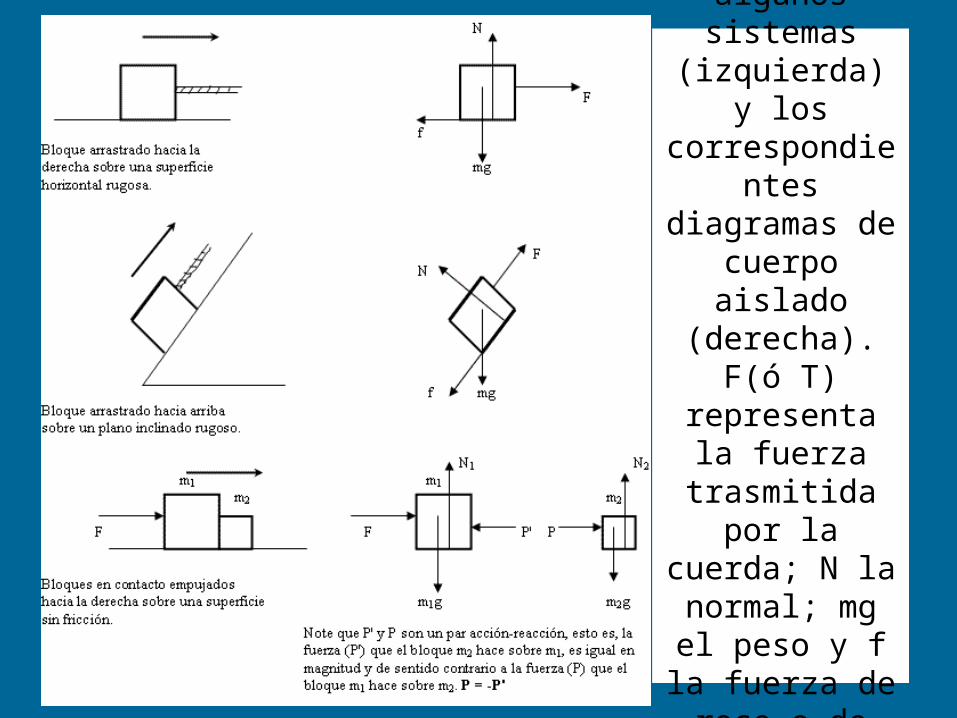
muestra de algunos sistemas
(izquierda) y los
correspondientes diagramas
de cuerpo aislado
(derecha). F(ó T) representa
la fuerza trasmitida por la cuerda; N
la normal; mg el peso y f la
fuerza de roce o de fricción.
Física para Arquitectura Torque
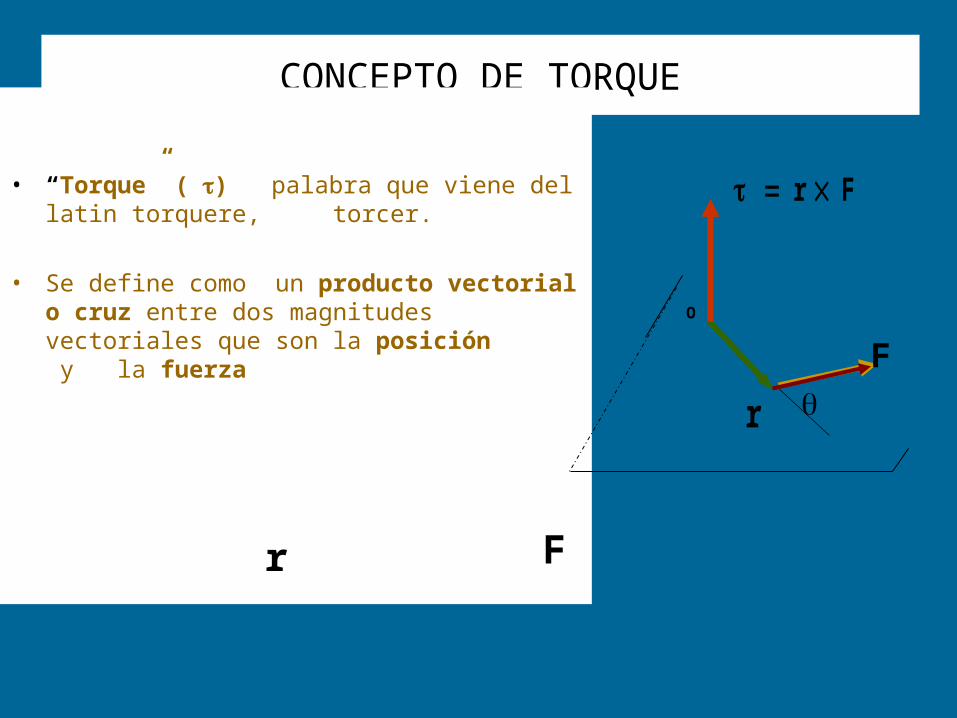
CONCEPTO DE TORQUE
• “Torque” ( ) palabra que viene del latin torquere, torcer.
• Se define como un producto vectorial o cruz entre dos magnitudes vectoriales que son la posición y la fuerza
O
r F
r
F
r F
1.- el módulo del vector resultante se determina como el producto entre los módulos de los vectores participantes y el seno del ángulo que forman dichos vectores ( r. F. sen ) .
2.- el sentido lo da la regla del tirabuzón o de la mano derecha.
.
O
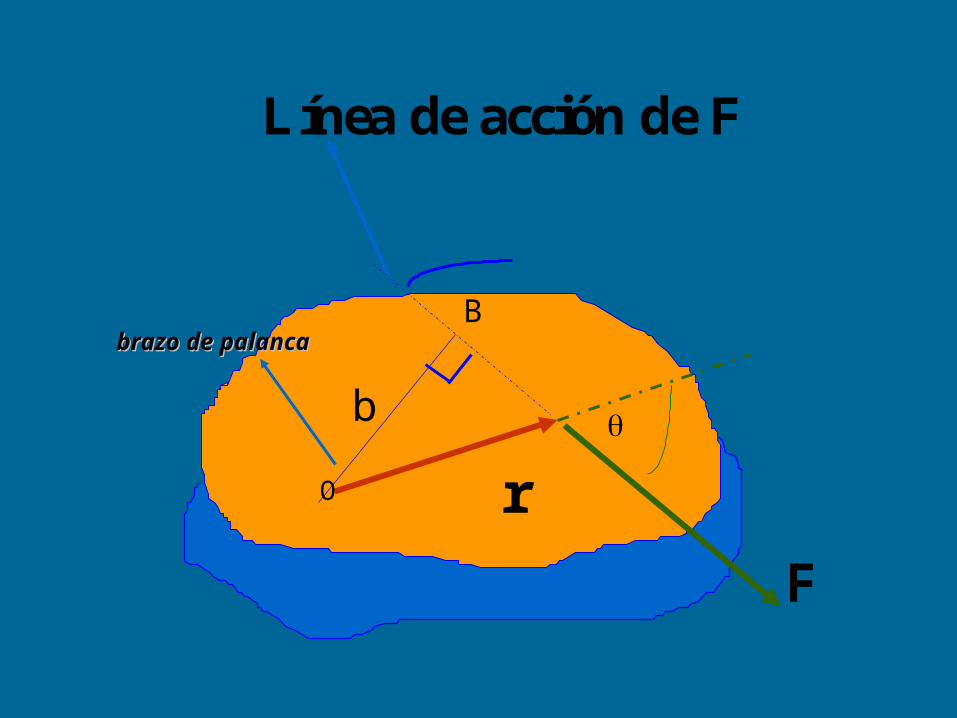
B
b
Línea de acción de F
F
r
brazo de palancabrazo de palanca
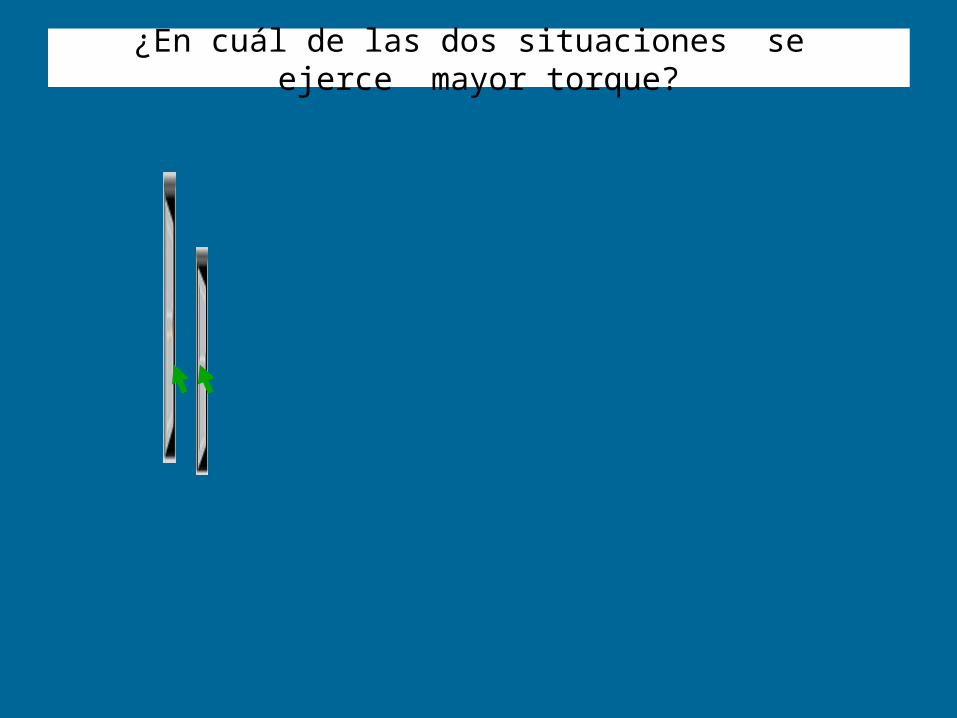
¿En cuál de las dos situaciones se ejerce mayor torque?
MAQUINAS SIMPLES:
• Las máquinas son dispositivos que multiplican una fuerza o bien cambian la dirección de una fuerza, entre las
máquinas simples podemos citar a las palancas, las poleas, gatas hidráulicas, tornos, planos inclinados.
MAQUINAS SIMPLES
Estas máquinas simples nos proporcionan una “ventaja mecánica (V.M)”.
Sea Fa a la fuerza de entrada (esfuerzo) y Fl a la fuerza de salida o fuerza de carga o resistente, entonces la ventaja mecánica ideal viene dada por (no se considera perdida por roce) :
V.M =
L
a
F
F
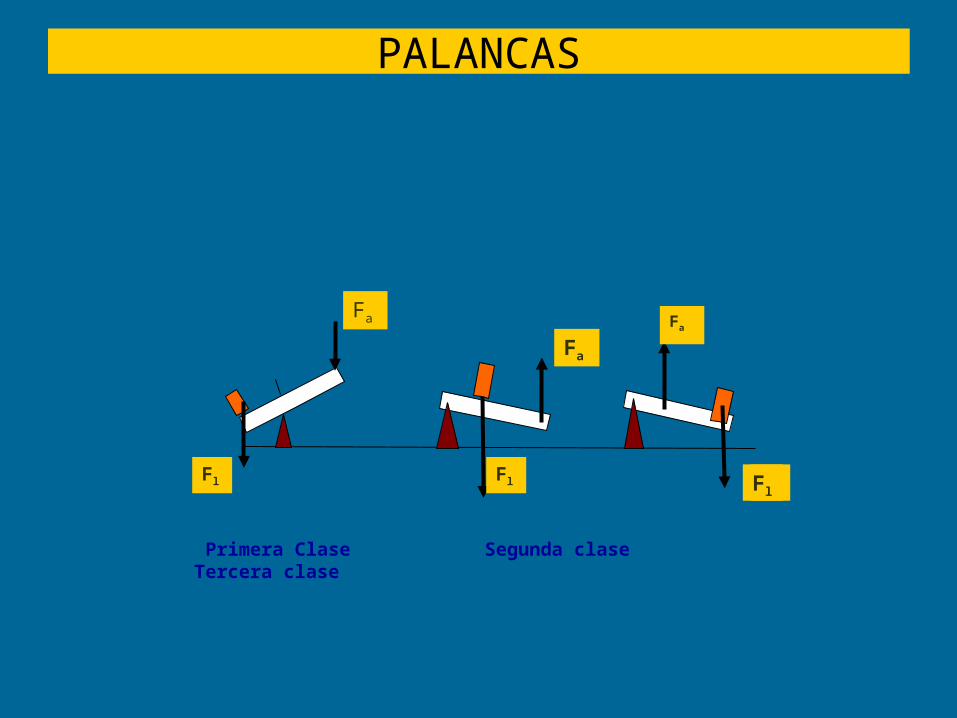
Primera Clase Segunda clase Tercera clase
PALANCAS
FlFlFlFl
Fa
Fa
Fa
PALANCAS• Según las posiciones que tengan las dos fuerzas y el fulcro,
se definen tres clases de palancas:
• Primera clase: el fulcro se encuentra entre ambas fuerzas
• Segunda clase: la carga está entre el fulcro y el esfuerzo.
• Tercera clase: el esfuerzo está entre el fulcro y la carga.
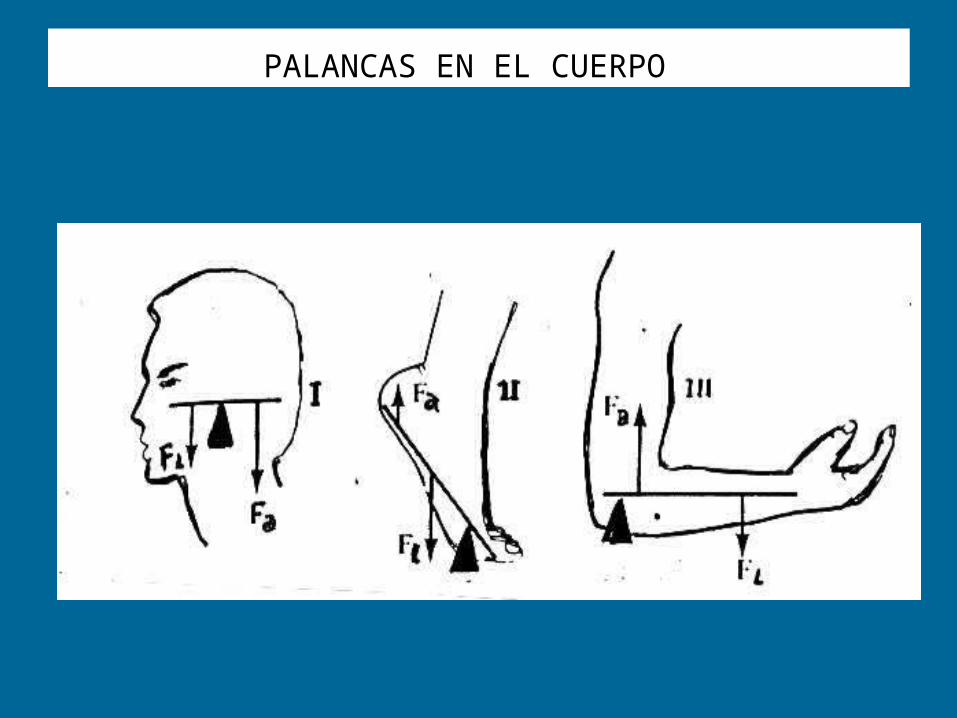
PALANCAS EN EL CUERPO
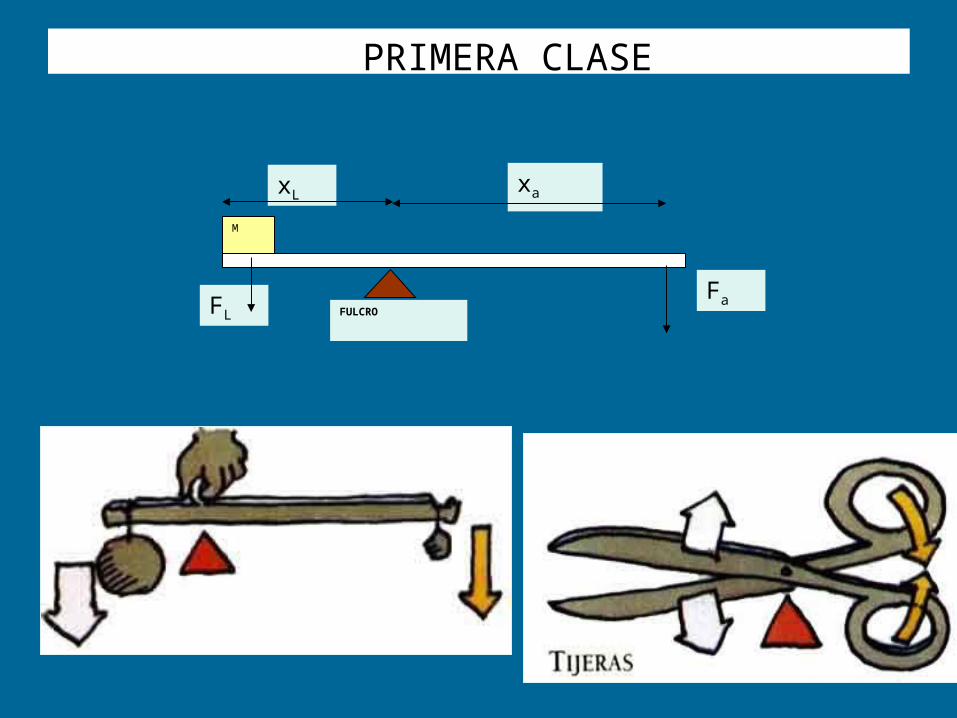
PRIMERA CLASE
FULCRO
xaxL
FL
M
Fa
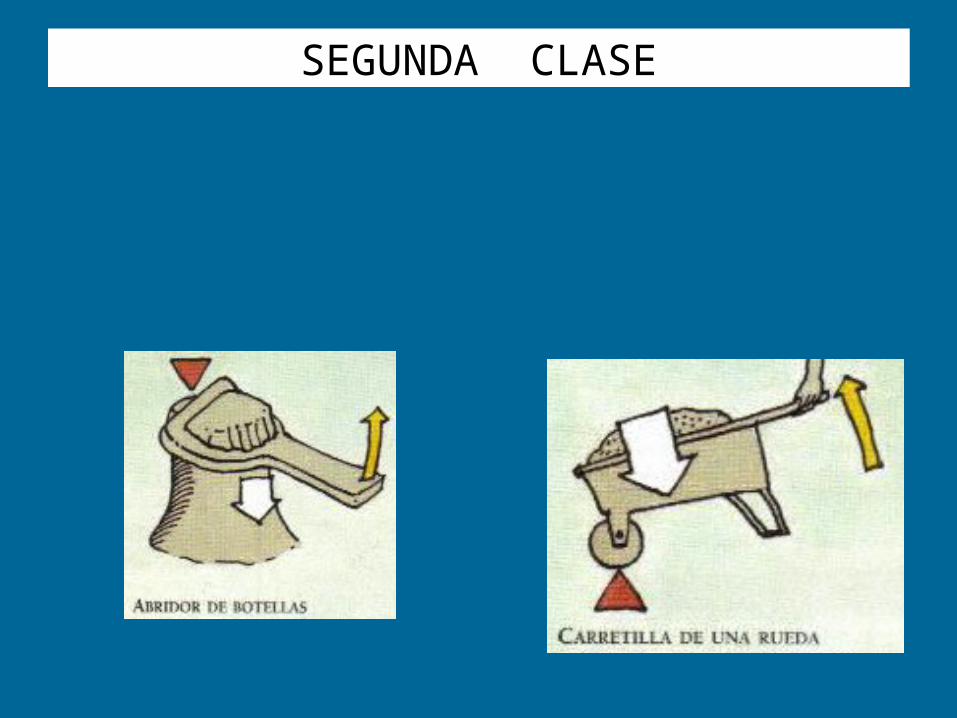
SEGUNDA CLASE
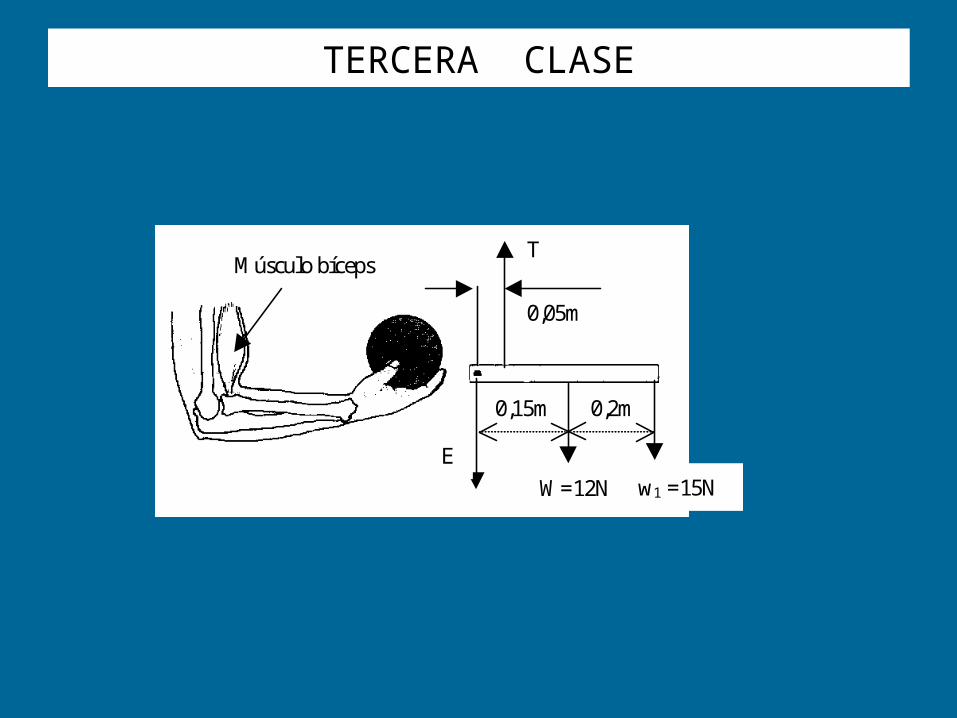
TERCERA CLASE
Músculo bícepsMúsculo bíceps T
0,05m
0,15m 0,2m
W=12N w1 =15N
E
TERCERA CLASE
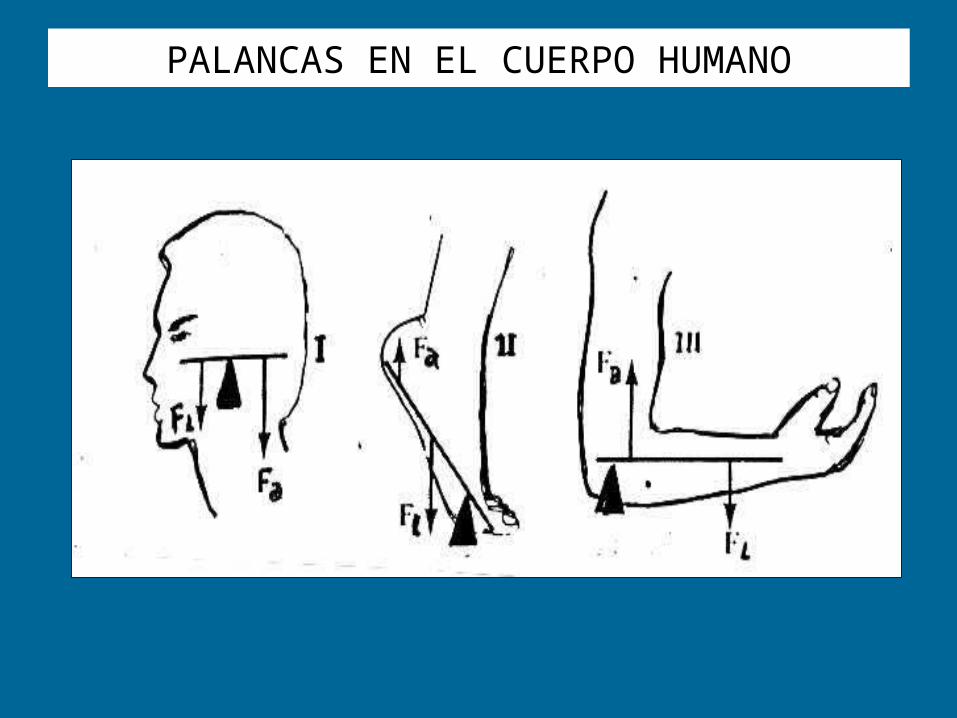
PALANCAS EN EL CUERPO HUMANO
Las poleas
• Al igual que las palancas, son máquinas simples. Una polea no es más que una rueda que puede girar libremente alrededor de un eje que pasa por su centro.
• Un sistema de poleas es un dispositivo con el cual se puede variar la
dirección y la magnitud de una fuerza para obtener alguna ventaja mecánica.
• Una sola polea fija se utiliza para cambiar la dirección y sentido de una fuerza, mientras que una combinación de varias poleas puede utilizarse para reducir la fuerza que se necesita para levantar una carga pesada.
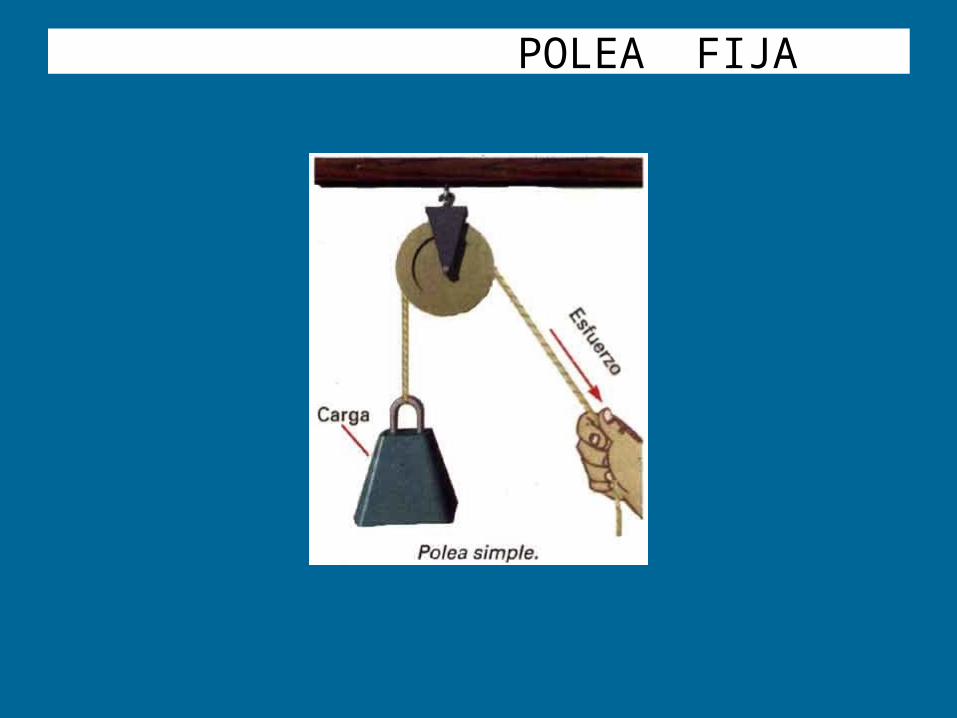
POLEA FIJA
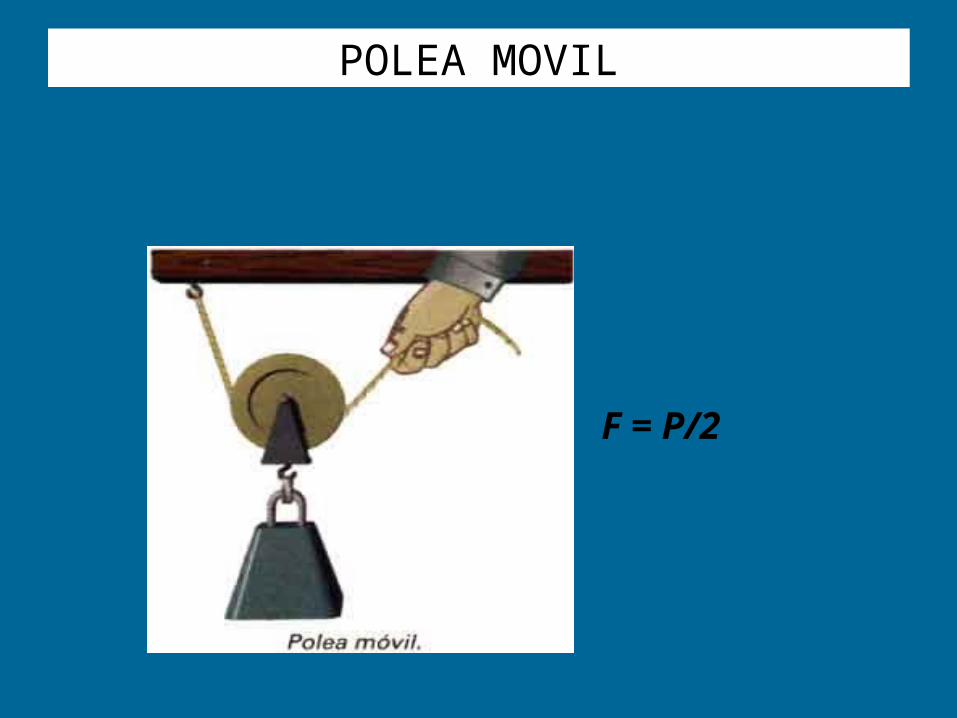
POLEA MOVIL
F = P/2
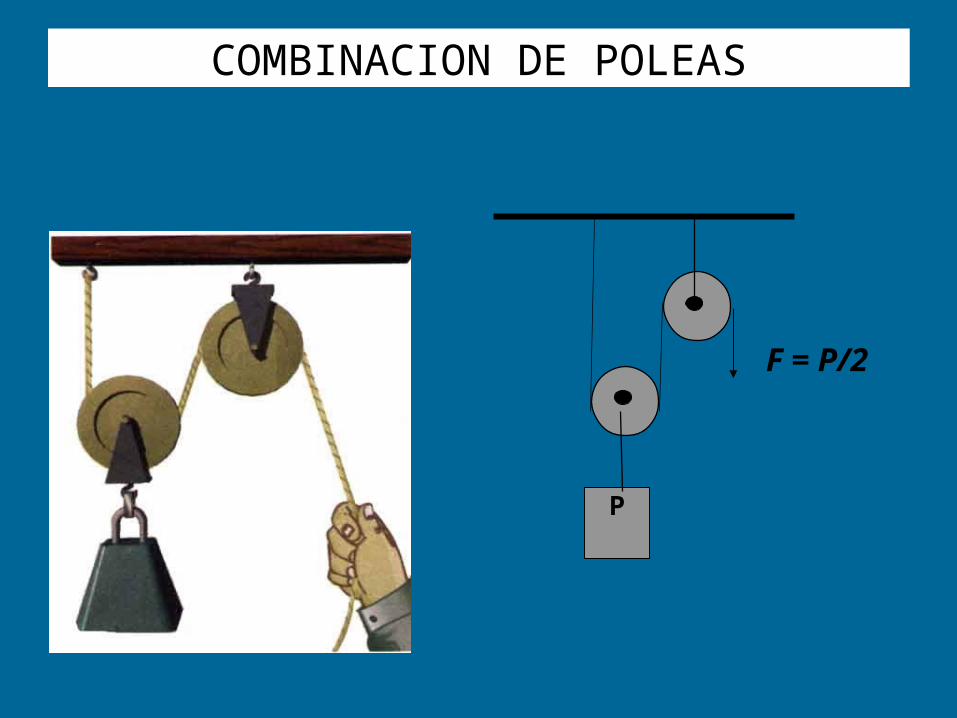
COMBINACION DE POLEAS
P
F = P/2
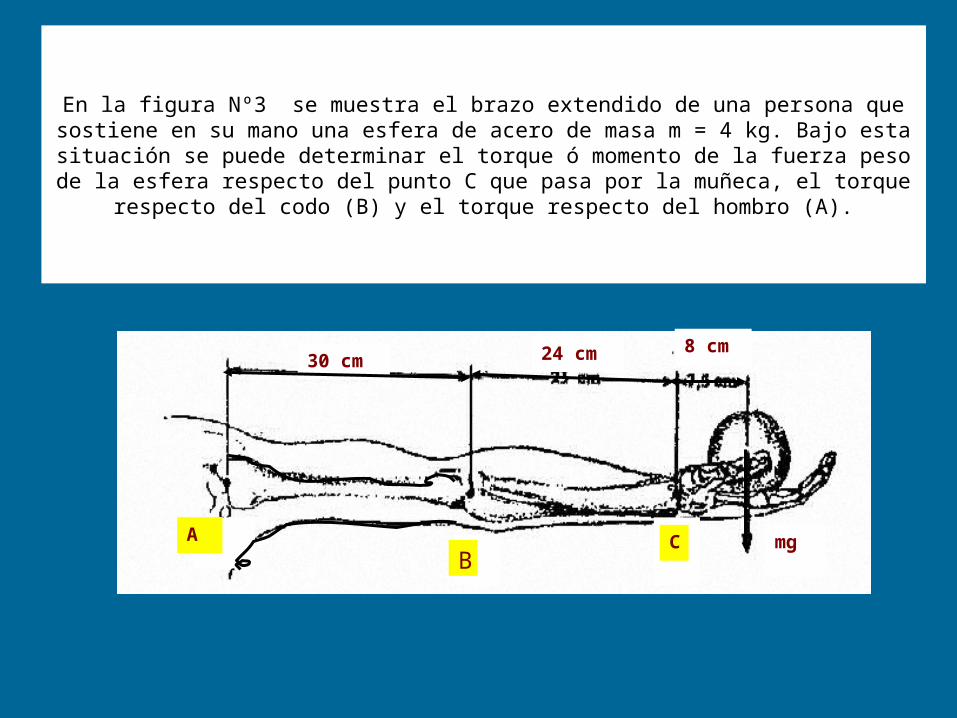
En la figura Nº3 se muestra el brazo extendido de una persona que sostiene en su mano una esfera de acero de masa m = 4 kg. Bajo esta situación se puede determinar el torque ó momento de la fuerza peso de la esfera respecto del punto C que pasa por la muñeca, el torque respecto del codo (B) y el torque
respecto del hombro (A).
30 cm 24 cm 8 cm
BCA mgC
BA