Episódios de Equações Diferenciais, 2015 - Técnico Lisboa · Finalmente, imaginem que querem...
99
Copyright c 2015, João Pedro Boavida. Versão atual disponível em http://web.tecnico.ulisboa.pt/joao.boavida/2015/ACED/. 0 π 3 - π 3 0 π 3 - π 3 2π 3 - 2π 3 E PISÓDIOS DE E QUAÇÕES DIFERENCIAIS , 2015 JOÃO PEDRO BOAVIDA
Transcript of Episódios de Equações Diferenciais, 2015 - Técnico Lisboa · Finalmente, imaginem que querem...
Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
0 π
3−π
3
0 π
3−π
3
2π3
− 2π3
EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS,2015
JOÃO PEDRO BOAVIDA

EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015Copyright c© 2015, João Pedro Boavida
Este trabalho (tanto esta versão como a versão atual) pode ser encontrado emhttp://web.tecnico.ulisboa.pt/joao.boavida/2015/ACED/.
Este trabalho é licenciado sob uma Licença Creative Commons Atribuição-NãoComercial-SemDerivados 3.0 Portugal. Para ver uma cópia desta licença,visite http://creativecommons.org/licenses/by-nc-nd/3.0/pt/.
Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
APRESENTAÇÃO
Estes apontamentos foram sendo escritos ao longo dos semestres em que dei Análise Com-plexa e Equações Diferenciais no IST/TagusPark. Na terceira iteração, decidi separar aanálise complexa das equações diferenciais. Nesta (a quarta), acrescentei alguns tópicos,figuras e correções. Poderão encontrar informação atualizada em http://web.tecnico.ulisboa.pt/joao.boavida/2015/ACED/.
Quis que o resultado final ficasse relativamente curto, pois é fácil ser-se inundado comimensa informação e perder de vista as ideias centrais. Assim, tentei evitar detalhes exagera-dos e deixei alguns tópicos para os exercícios (isto não significa que esses tópicos são menosimportantes; só significa que explicar os detalhes por escrito não ia acrescentar muito àquiloque conseguiriam fazer sozinhos, seguindo os passos sugeridos).
À falta de melhor nome, chamei “episódio” a cada conjunto de apontamentos, corres-pondente a cerca de uma semana de aulas. Tentei escrever informalmente, como se estivés-semos a conversar (daí usar o plural da primeira pessoa). Como não é um monólogo, comoa ideia é que participem ativamente na viagem, deixei algumas perguntas e exercícios pelocaminho. Quando algum exercício for inesperadamente exigente, eu assinalo-o com ?.
Ao contrário de análise complexa (em que as ideias centrais são tão surpreendentes quese justifica começar a explorá-las desde logo, em vez de só as descobrir mesmo no final), emequações diferenciais, em geral, a ordem “lógica” coincide com a ordem natural, e por issoeu vou normalmente segui-la. Os dois primeiros episódios são a única exceção relevante:a ordem “lógica” seria começar pelas demonstrações no episódio 2, enquanto que a ordemmais intuitiva é começar pelos exemplos no episódio 1.
Nada do que aqui lerem é original; estas ideias já estavam arrumadas, aproximadamenteno formato atual, há mais de meio século.
UMA EQUAÇÃO DIFERENCIAL é uma equação cuja incógnita é uma função y(t) e em que apa-recem derivadas de y . Por exemplo,
y ′− t · y = 0
é uma equação diferencial de primeira ordem (a “ordem” é a ordem da derivada mais altaque aparece). Substituindo y(t) = t2, podemos verificar que não é uma solução, pois
(t2)′− t · (t2) 6= 0.
Por outro lado, y(t) = 0 é uma solução, pois
(0)′− t · 0= 0.
É comum omitir a variável independente na equação (ou seja, escrever y em vez de y(t)). Éclaro que isso não causa ambiguidade, pois o facto de escrevermos y ′ sugere imediatamente
3/99

que y depende da outra variável, e não o contrário. Por vezes, usamos a notação maisexplícita dy
dt, para indicar claramente qual a variável dependente e a variável independente.
Também distinguimos entre equações diferenciais ordinárias (EDOs, as que só têm umavariável independente) e as equações diferenciais parciais (EDPs, as com mais que uma va-riável independente, e que portanto envolvem derivadas parciais). Vamos trabalhar quasesó com EDOs; só no último episódio é que faremos alguma coisa com EDPs.
À primeira vista, não é nada óbvio como encontrar soluções para uma equação diferen-cial. É verdade que algumas equações diferenciais podem ser resolvidas de forma relativa-mente simples; para dar um exemplo extremo, podemos usar integração para resolver
y ′ = t2, com y(0) = 2.
Aqui, y(0) (ou y noutro ponto específico, se for isso que temos) é a condição inicial.Mas esse método só raramente funciona. Por exemplo, não funciona com a equação
x y ′− 2y y ′+ y = 0, y(0) = 3.
O episódio 1 é dedicado a várias estratégias para resolver EDOs de primeira ordem.É razoável querer um critério simples para determinar a priori se uma EDO tem solução,
e se, fixada a condição inicial, a solução é única. É que em geral esperamos que, se doiscarros começam a viagem lado a lado e as suas velocidades variam da mesma forma aolongo do tempo, então deveriam continuar lado a lado ao longo de toda a viagem. Noepisódio 2 discutimos um critério.
Se tivermos um sistema como(
x ′1 = x2,
x ′2 =−42x1+ 13x2,
podemos escrevê-lo na forma matricial
x1
x2
′=
0 1−42 13
︸ ︷︷ ︸
A
x1
x2
,
obtendo x′ = Ax. Imaginemos que x = Su é uma mudança de variável (exigimos emparticular que a matriz S seja invertível), permitindo escrever Su′ = ASu. Se escolhermosJ = S−1AS, temos SJ = AS, ou seja, a equação fica Su′ = SJu ou (multiplicando à esquerdapor S−1, de ambos os lados, e simplificando) u′ = Ju. Acontece que todas as matrizes têmuma forma canónica de Jordan J , para a qual u′ = Ju é fácil de resolver. A partir dessasolução u, podemos obter a solução x = Su. No episódio 3 vamos discutir essas e outrasEDOs lineares em Rn.
Uma EDO de ordem superior pode ser transformada numa EDO em Rn. Por exemplo,f ′′ − 13 f ′ + 42 f = 0 (a variável independente continua a ser t) pode ser simulada usandox1 = f e x2 = f ′. O sistema fica então(
x ′1 = f ′ = x2,
x ′2 = f ′′ =−42 f + 13 f ′ =−42x1+ 13x2,ou
x1
x2
′=
0 1−42 13
︸ ︷︷ ︸
A
x1
x2
.
4/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
Obtemos precisamente a mesma equação de há pouco, o que significa que os métodos paraequações lineares em Rn são suficientes para resolver equações de ordem superior. Porém,raramente são convenientes, e por isso no episódio 4 vamos discutir outros métodos, comespecial ênfase no método dos aniquiladores.
Entre outras propriedades, a transformada de Laplace converte soluções de EDOs deordem superior em funções no plano complexo com um número finito de polos, e é possívelusar o teorema dos resíduos para recuperar a função original. Isto só por si não seria muitointeressante. O que é interessante é que a transformada converte equações diferenciais emequações algébricas, mais fáceis de resolver. Vamos falar de tudo isto no episódio 5.
Finalmente, imaginem que querem resolver esta equação diferencial parcial:
∂ u
∂ t=∂ 2u
∂ x2 ,
com 0 ≤ x ≤ 1 e t ≥ 0. Como é que alguém poderia resolver uma equação desse género?Na falta de outras ideias, uma opção é tentar encontrar soluções por tentativa e erro. Porexemplo, podemos substituir u(t, x) = T (t) · X (x). Com algum cuidado, acabamos porconcluir que
X (x) = C1 cos(πkx) + C2 sin(πkx), onde k ∈ Z.De facto, para as condições de fronteira (isto é, condições para u ou ∂ u
∂ xem x = 0 e x = 1)
que vamos considerar, é possível mostrar que a solução geral é da forma
u(t, x) =∑
k≥0
ak(t) cos(πkx) +∑
k>0
bk(t) sin(πkx),
onde as funções ak e bk podem ser obtidas (com as técnicas dos episódios anteriores) apartir da condição inicial u(0, x). No episódio 6, vamos falar das séries de Fourier (istoé, séries semelhantes à de u(t, x)) e algumas variantes. No episódio 7, discutimos váriosexemplos de EDPs, resolvidas aplicando técnicas de todos os episódios anteriores.
João Pedro Boavida < . @ . . >a a i a e i i ao o o t o u s o tj b v d cn c l b p ,Departamento de Matemática, Instituto Superior Técnico,Universidade de Lisboa,Outubro de 2015
5/99
CONTEÚDO
EPISÓDIO 1: EQUAÇÕES DIFERENCIAIS ORDINÁRIAS . . . . 8
(1.1) ALGUNS EXEMPLOS . . . 8
(1.5) AS EQUAÇÕES SEPARÁVEIS . . . 10
(1.11) EQUAÇÕES EXATAS. . . . 11
(1.14) EQUAÇÕES REDUTÍVEIS A EXATAS. . . . 12
(1.22) EQUAÇÕES LINEARES DE PRIMEIRA ORDEM. . . . 16
(1.25) MUDANÇA DE VARIÁVEL. . . . 19
(1.30) RESPOSTAS DE EXERCÍCIOS. . . . 20
EPISÓDIO 2: EXISTÊNCIA DE SOLUÇÕES DE EDOS. . . . . 21
(2.1) RETRATOS DE FASE. . . . 21
(2.3) O TEOREMA DE PICARD–LINDELÖF . . . 22
(2.11) CONSTANTES DE LIPSCHITZ E OPERADORES CONTRATIVOS. . . . 24
(2.21) PROLONGAMENTO DE SOLUÇÕES. . . . 26
(2.30) COMPARAÇÃO DE SOLUÇÕES. . . . 29
(2.35) RESPOSTAS DE EXERCÍCIOS. . . . 30
EPISÓDIO 3: EDOS EM Rn E EXPONENCIAIS DE MATRIZES . . . . 31
(3.1) EXPONENCIAL DE MATRIZES. . . . 32
(3.3) A FÓRMULA DE VARIAÇÃO DAS CONSTANTES . . . 33
(3.6) CÁLCULO DE eAt . . . . 34
(3.7) EXPONENCIAL DE MATRIZ DIAGONAL. . . . 34
(3.13) EXPONENCIAL DE BLOCO DE JORDAN. . . . 36
(3.18) A FORMA DE JORDAN DE UMA MATRIZ. . . . 38
(3.26) COEFICIENTES NÃO CONSTANTES. . . . 47
(3.33) RESPOSTAS DE EXERCÍCIOS. . . . 50
EPISÓDIO 4: EQUAÇÕES DIFERENCIAIS DE ORDEM SUPERIOR . . . . . 51
(4.5) DERIVADAS E ANIQUILADORES. . . . 52
(4.12) O MÉTODO DOS ANIQUILADORES. . . . 54
(4.18) PARTE NÃO HOMOGÉNEA DEFINIDA POR TROCOS. . . . 56
(4.21) COEFICIENTES NÃO CONSTANTES. . . . 57
(4.26) RESPOSTAS DE EXERCÍCIOS. . . . 59
6/99
Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
CONTEÚDO
EPISÓDIO 5: TRANSFORMADA DE LAPLACE . . . . 60
(5.1) FUNÇÕES DEFINIDAS POR TROÇOS. . . . 60
(5.5) A TRANSFORMADA DE LAPLACE. . . . 61
(5.18) RESOLUÇÃO DE EDOS USANDO TRANSFORMADA DE LAPLACE. . . . 66
(5.22) A TRANSFORMADA INVERSA. . . . 68
(5.32) RESPOSTAS DE EXERCÍCIOS. . . . 73
EPISÓDIO 6: AS SÉRIES DE FOURIER . . . . 74
(6.1) FUNÇÕES PERIÓDICAS. . . . 75
(6.12) SÉRIES DE FOURIER. . . . 76
(6.17) SÉRIES DE SENOS. . . . 80
(6.20) SÉRIES DE COSSENOS. . . . 81
(6.25) VALOR DE UMA SÉRIE DE FOURIER NUM PONTO. . . . 82
(6.30) RESPOSTAS DE EXERCÍCIOS. . . . 83
EPISÓDIO 7: ALGUMAS EDPS . . . . 84
(7.1) O MÉTODO DAS CARACTERÍSTICAS. . . . 85
(7.13) A EQUAÇÃO DE CONTINUIDADE. . . . 90
(7.14) A EQUAÇÃO DO CALOR . . . 91
(7.15) RESOLUÇÃO DE EDPS USANDO SÉRIES DE FOURIER. . . . 91
(7.24) A EQUAÇÃO DAS ONDAS . . . 95
(7.31) A EQUAÇÃO DE LAPLACE . . . 97
(7.35) RESPOSTAS DE EXERCÍCIOS. . . . 99
7/99
EPISÓDIO 1
EQUAÇÕES DIFERENCIAIS ORDINÁRIAS
Neste episódio, vamos discutir as estratégias mais importantes para resolver equações dife-renciais ordinárias (EDOs) de primeira ordem. Aqui, mencionamos só algumas ideias.
Considerem a equação
x y ′− 2y y ′+ y = 0, y(0) = 3.
À primeira vista, não é óbvio como resolvê-la. Por outro lado, quem é ddx(x y− y2)? (Notem
que x é a variável independente, por isso (y2)′ = ddx(y2) não é só 2y!) Qual é então a
solução da equação?Uma equação diferencial diz-se exata se existe uma função Φ(x , y) que permite escrever
a equação na forma ddx
Φ(x , y)
= 0. Usando a regra da função composta, isso fica ∂Φ∂ x+
∂Φ∂ y· dy
dx= 0. Assim, se y(x) é uma solução da equação, Φ(x , y(x)) é constante.
Pode acontecer que uma equação não seja exata, mas que seja redutível a exata. Porexemplo, a equação
x ex y ′+ ex y − 1= 0
não é exata (como é que podemos ter a certeza?). Mas se multiplicarmos tudo por e−x
(porque é que podemos?), obtemos
x y ′+ y − e−x = 0,
que é exata. Conseguem resolvê-la?
(1.1) ALGUNS EXEMPLOS para ilustrar como é possível resolver certas equações, mesmo semgrande estratégia. Na equação
x + x y ′ = 2y,
podemos tentar que x y ′ e 2y sejam parcelas de uma derivada do quociente (porquê?). Paratal, precisaríamos que fossem x2 y ′ e 2x y , algo que podemos conseguir multiplicando tudopor x e fazendo algumas manipulações simples:
x2 y ′− (x2)′ y =−x2.
Daqui, basta-nos dividir tudo por (x2)2, que nos leva a
(x2) y ′− (x2)′ y
(x2)2=− 1
x2
e a y
x2
′=1
x
′, ou
y
x2 =1
x+ C ,
para alguma constante C . Assim, desde que o intervalo de definição que queremos excluax = 0 (porquê?), concluímos que y = x + C x2.
8/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 1: EQUAÇÕES DIFERENCIAIS ORDINÁRIAS
(1.2) Vejamos um exemplo com uma equação de segunda ordem (i.e., envolvendo a segundaderivada). Se
(2x + 1) f ′′− 2 f ′ = (1− 4x2) (2x + 1),
é tentador ver o lado esquerdo como numerador de uma regra do quociente. Se dividirmostudo por (2x + 1)2, ficamos com
(2x + 1) f ′′− (2x + 1)′ f ′
(2x + 1)2=
1− 4x2
2x + 1.
Como 1− 4x2 = (1− 2x) (1+ 2x), podemos simplificar um pouco mais e chegar a f ′
2x + 1
′= 1− 2x .
Assim, para intervalos de definição excluindo 2x + 1 6= 0 (porquê?), vemos que
f ′
2x + 1= x − x2+ A,
para alguma constante A. Escrevendo em ordem a f ′ e primitivando uma segunda vez,concluímos que
f =x2
2+
x3
3− x4
2+ A (x2+ x) + B,
para uma segunda constante B.
(1.3) Exercício. Considerem uma solução definida em todo o R. Acabámos de ver que parax <−1
2(porquê −1
2?) a solução é da forma
f =x2
2+
x3
3− x4
2+ A1 (x
2+ x) + B1
para constantes A1 e B1, e que para x >−12
é da forma
f =x2
2+
x3
3− x4
2+ A2 (x
2+ x) + B2
para constantes A2 e B2. Quais as relações entre as várias constantes? Conseguem determi-nar todas as soluções da equação? Pode ser útil voltar à equação original e tentar determinarf ′(−1
2).
(1.4) Exercício. Resolvam estas equações diferenciais tentando reconhecer regras de deri-vação. Determinem também os intervalos em que as soluções são válidas. (Pode ser útilcomeçarem por identificar a variável dependente e a independente, já que variam de equa-ção para equação.) Se tiverem informação suficiente, determinem as constantes.
(a) y ′ = t2, y(0) = 2;(b) 2y y ′ = x2, y(1) = 1;(c) 2y y ′ = x2, y(1) =−1;(d) f + t f ′ = t, f (−2) =−1;(e) f + t f ′ = t, f (−2) =−2;
(f)u′
u=
1
x2 , u(1) =−1.
9/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(1.5) AS EQUAÇÕES SEPARÁVEIS são aquelas em que, através de multiplicações ou divisões(de ambos os membros pela mesma função), conseguimos separar as variáveis em ladosopostos da equação. Por exemplo,
dy
dx· x = y2 · log x , y(1) =−2,
pode ser escrita na forma
1
y2
dy
dx=
log x
x, y(1) =−2,
desde que não haja divisões por zero. (Já agora, log é o logaritmo natural, já que não háqualquer outro logaritmo relevante daqui em diante.) Ou, escrito de forma mais sugestiva,
dy
y2 =1
x· log x dx .
Integrando de ambos os lados, obtemos (é preciso fazer mudanças de variável—quais?)
− 1
y=(log x)2
2+ C
(não se esqueçam da constante!). Substituindo a condição inicial y(1) = −2, descobrimosque C = 1/2. Portanto,
y =− 2
(log x)2+ 1.
(1.6) Exercício. Aqui está uma equação mais simples: usando a mesma estratégia, procuremsoluções de
y ′− x y + y = 0, y(0) = 2.
Notem que é preciso algum cuidado a lidar com os casos y = 0 ou y < 0.
(1.7) Exercício. Resolvam a equação
y ′ ex = 1+ y, y(0) = e− 1.
(1.8) Exercício. Resolvam a equação
t y ′+ y2+ 1= y ′+ t2 y2+ t2, y(0) = 0.
(1.9) Exercício. Considerem agora a equação
y ′ = (3+ t) y2.
(a) Assumindo que y(t) 6= 0, qual a solução desta equação? Notem que não estamosa especificar a sua condição inicial. Isso significa que, depois de fazer as primitivas, nãotemos como determinar o valor da constante, e por isso deixamo-la ficar, sem tentarmosespecificar o seu valor.
(b) Qual o intervalo de definição da solução da alínea anterior?
10/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 1: EQUAÇÕES DIFERENCIAIS ORDINÁRIAS
(c) Encontrem uma solução com y(0) = 0.
(d) Imaginem que y(t) é uma solução com y(t0) > 0. Mostrem que, no seu intervalode definição, temos sempre y(t)> 0.
(e) Façam o mesmo para uma solução com y(t0)< 0.
(f) Concluam que só existe uma solução com y(t0) = 0. Qual é?
(1.10) Exercício. Façam um estudo (como o do exercício anterior) das soluções de cadauma destas equações:
(a) (3+t) y ′ = y; (b) (3+t) y ′ = y2; (c) y ′−y t = y ′ t2.
(1.11) EQUAÇÕES EXATAS. Há pouco, considerámos a equação
x y ′− 2y y ′+ y = 0
(a variável independente é x) com condição inicial y(0) = 3. Observámos que
ddx
x y − y2= x y ′− 2y y ′+ y,
o que nos leva a concluir (porquê?) que x y − y2 é constante. Substituindo a condiçãoinicial, vemos que a constante é −9 e obtemos a fórmula x y − y2 = −9, que pode serresolvida para obter y .
Dissemos que a equação (com variável independente x)
P +Q · y ′ = 0
é exata se existir uma função Φ(x , y) cujo gradiente seja (P,Q), ou seja, cujas derivadasparciais sejam ∂Φ
∂ x= P e ∂Φ
∂ y= Q. Nesse caso, Φ(x , y) é constante ao longo das soluções
y(x) da equação (notem que x é a variável independente), pois a regra da função compostadiz-nos que
ddx
Φ(x , y(x))
=∂Φ∂ x︸︷︷︸
P
+∂Φ∂ y︸︷︷︸
Q
· dy
dx︸︷︷︸
y ′
= P +Q · y ′ = 0.
Se um tal Φ existir, então teremos
∂
∂ x
∂Φ∂ y︸︷︷︸
Q
=∂
∂ y
∂Φ∂ x︸︷︷︸
P
⇔ ∂Q
∂ x− ∂ P
∂ y= 0.
(Se isto vos lembra alguma coisa, não é coincidência.) Ou seja, a equação é exata apenas se∂Q∂ x= ∂ P∂ y
.
11/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(1.12) Por exemplo, considerem a equação diferencial
−2x2 y︸ ︷︷ ︸
Q
y ′−2x y2+ ex︸ ︷︷ ︸
P
= 0
com condição inicial y(1) = 2. Queremos encontrar uma função Φ cujo gradiente ∂Φ∂ x
, ∂Φ∂ y
seja (P,Q). Para isso consideramos
∂Φ∂ x=−2x y2+ ex ⇒ Φ =−x2 y2+ ex + (função de y),
∂Φ∂ y=−2x2 y ⇒ Φ =−x2 y2+ (função de x).
A escolha Φ(x , y) =−x2 y2+ex é compatível com ambas as condições. Como Φ(1, 2) = e−4(de onde vêm o 1 e o 2?), concluímos que a solução satisfaz a equação
−x2 y2+ ex = e− 4.
Resolvendo em ordem a y , obtemos
y =±r
ex − e+ 4
x2 .
Só o sinal positivo é compatível com a condição inicial; essa é a fórmula para a solução.
(1.13) Exercício. Experimentem resolver estas equações exatas (nalguns casos pode não serprático resolver em ordem a y; vão tão longe quanto conseguirem):
(a) 2x + 2y y ′ = 1, y(0) = 1;(b) 2y y ′+ y sin x = y ′ cos x , y(0) =−2;(c) y2+ 2x y y ′+ y sin x = y ′ cos x − 2x , y(π) = 0;(d) 2x y y ′+ y2 = 4x3, y(1) = 1;(e) x4 y ′+ 4x3 y + 1= 2x y y ′+ y2+ y ′, y(1) = 2;(f) πy sin(πx) + y ′ = x2 y ′+ 2x y + y ′ cos(πx), y(2) = 1;(g) 4x3+ x y ′+ 2y y ′+ y + 9= 2x2 y ′+ 3x2+ 4x y + 4x , y(0) = 3.
(1.14) EQUAÇÕES REDUTÍVEIS A EXATAS. Também vimos que a equação
x ex y ′+ ex y − 1= 0
não é exata e observámos que, se a multiplicarmos por e−x , obtemos
x y ′+ y − e−x = 0,
que é uma equação exata com as mesmas soluções que a primeira. (Conseguiram resolvê--la?) Por isso, dizemos que a equação original é redutível a exata. A função e−x usada parafazer a redução é chamada fator integrante ou fator de integração. (Como usamos integração
12/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 1: EQUAÇÕES DIFERENCIAIS ORDINÁRIAS
para resolver uma equação exata, também há quem fale em “integrar a equação” em vez de“resolver a equação”—e por isso o fator ajuda a integrar a equação. Daí o nome.)
E como é que encontramos fatores integrantes? Boa pergunta. Se tivermos uma equação
P +Q · y ′ = 0
e µ(x , y) for um fator integrante (é tradicional chamar µ ao fator), então a equação
µ · P +µ ·Q · y ′ = 0
é exata. Isso significa que as derivadas cruzadas são iguais, ou seja,
∂ (µQ)∂ x
=∂ (µP)∂ y
.
Simplificando estas derivadas (com a regra do produto), obtemos
∂ µ
∂ x·Q+µ · ∂Q
∂ x=∂ µ
∂ y· P +µ · ∂ P
∂ y.
Notem que tanto P e Q (conhecidas) como µ (desconhecido) são funções de x e de y . Secalhar isto não é lá muito prático. . .
(1.15) De acordo: se não soubermos nada sobre µ, não vamos longe. Mas podemos tentarcasos especiais. Por exemplo, se µ só depender de x , então a equação anterior fica apenas
dµ
dx·Q+µ · ∂Q
∂ x= µ · ∂ P
∂ y.
Se, após simplificação, for possível eliminar y , então esta equação é separável (!) para µ(se tal não for possível, então não existe µ dependente só de x). Voltemos ao exemplo dehá pouco:
x ex︸︷︷︸
Q
y ′+ ex y − 1︸ ︷︷ ︸
P
= 0
A equação para µ ficadµ
dx· x ex︸︷︷︸
Q
+µ · (ex + x ex)︸ ︷︷ ︸
∂Q∂ x
= µ · ex︸︷︷︸
∂ P∂ y
.
Concordo que isto parece cada vez pior. Mas podemos fazer alguns cancelamentos e simpli-ficar um pouco a equação:
dµ
dx=−µ.
Resolvam em ordem a µ (há mais que uma solução, escolham uma qualquer que não sejanula, por exemplo, a que tem µ(0) = 1). Que função encontram? (A sério; parem aqui paracalcular.) E qual é o fator integrante que tínhamos usado antes? Coincidência?
13/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(1.16) Se quisermos um fator integrante µ dependente apenas de y , a equação no final de(1.14) reduz-se (porquê?) a
µ · ∂Q
∂ x=
dµ
dy· P +µ · ∂ P
∂ y.
Por exemplo, a equação
x4 y2 y ′+ 4x3 y3 = 2y3 y ′, y(0) =−4
tem um fator integrante que só depende de y . Se escreverem a equação diferencial para µ(experimentem!) e simplificarem, chegam a algo como
dµ
dy=−2µ
y.
(Já agora, reparem que depois de simplificada a equação envolve apenas µ e y . Se aindarestasse algum x , era impossível resolvê-la com um µ dependente apenas de y . Percebemporquê?) Esta equação é separável; qual é a sua solução?
Podemos ver que µ(y) = y−2 é um fator integrante. (Conseguem, sem quaisquer contas,indicar outros fatores integrantes?) Multiplicando-o na equação original, obtemos
x4 y ′+ 4x3 y − 2y y ′ = 0, y(0) =−4,
cuja integração leva a x4 y − y2 =−16. Resolvendo em ordem a y , obtemos
y =x4−
p
x8+ 64
2
(reparem que escolhemos o sinal negativo, pois só esse é compatível com y(0) =−4).
(1.17) Exercício. Encontrem fatores integrantes para as seguintes equações, e resolvam-nas.(a) x2 y ex + x2 ex y ′+ x y ′ = y, y(1) = e+ 1;(b) y2 cos x + y y ′ sin x = 0, y(π
2) = 2;
(c) 2x2 y2 y ′+ x y3+ y ′ = 3x y y ′+ y2, y(1) = 1;
(d) y y ′+ y ex + 1=x y ′
y, y(0) = 2.
As equações podem ser resolvidas com fatores da forma µ(x) ou µ(y). Se houver fatores deambos os tipos, determinem-nos, e resolvam a equação original usando ambos os fatores.
(1.18) Mas sejamos um pouco mais ambiciosos: haverá alguma forma sistemática de verifi-car se existe um fator integrante da forma µ(x + y) ou µ(x y) ou µ(x − y)? (Aqui estamosa cometer um pequeno abuso de linguagem: em vez de falar em µ(x+ y), deveríamos falarem µ(x , y) = ν(x+ y), onde ν é uma nova função. Mas tal não seria necessariamente maisclaro.)
Há. Se o fator integrante for da forma µ(s) (onde s = x + y , ou s = x y , ou s = x − y ,ou outra expressão que queiramos experimentar), então a equação no final de (1.14) podeescrever-se
dµ
ds· ∂ s
∂ x·Q+µ · ∂Q
∂ x=
dµ
ds· ∂ s
∂ y· P +µ · ∂ P
∂ y.
14/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 1: EQUAÇÕES DIFERENCIAIS ORDINÁRIAS
Separando o µ à esquerda e abreviando µ′ = dµds
, podemos ainda obter (verifiquem)
µ′
µ=−
∂Q∂ x− ∂ P∂ y
∂ s∂ x·Q− ∂ s
∂ y· P .
Se for possível simplificar o lado direito de forma a envolver apenas s, então a solução destaequação é um fator integrante. De contrário, a equação é impossível (pois o lado esquerdopoderia ser escrito apenas em termos de s e o lado direito não, o que seria uma contradição).
(1.19) Por exemplo, considerem a equação
x5 y ′+ x4 y y ′+ 4x4 y + 4x3 y2 = 2x2 y y ′+ 2x y2 y ′+ x y2+ y3, y(1) = 2,
que tem um fator integrante da forma µ(x + y) (portanto, s = x + y , ∂ s∂ x= 1 e ∂ s
∂ y= 1).
Como P = 4x4 y + 4x3 y2 − x y2 − y3 e Q = x5 + x4 y − 2x2 y − 2x y2, a fórmula paraµ′
µfica
µ′
µ=− x4− 4x3 y − 2x y + y2
∂ s∂ x·Q− ∂ s
∂ y· P =− x4− 4x3 y − 2x y + y2
x5− 3x4 y − 2x2 y − x y2− 4x3 y2+ y3 .
Se existir um fator integrante que dependa apenas de s = x + y , devíamos ser capazes desimplificar esta expressão de forma a depender apenas de s. A tarefa não parece promete-dora, mas se for possível, o x4 de cima deve (junto com o resto do numerador) conseguircancelar parte do denominador, de forma a obter uma expressão com x + y . Assim, umpalpite razoável neste caso é: será que o denominador é apenas x + y multiplicado pelonumerador? Experimentemos:
(x + y) (x4−4x3 y −2x y + y2) = x5−4x4 y −2x2 y + x y2+ x4 y −4x3 y2−2x y2+ y3.
É realmente o denominador. Assim, concluímos que
µ′
µ=− 1
x + y=−1
s.
Uma solução desta equação é µ(s) = s−1, mostrando que 1/(x + y) é um fator integrante.Dito de outra forma, devemos conseguir pôr (x + y) em evidência na equação original
x5 y ′+ x4 y y ′+ 4x4 y + 4x3 y2 = 2x2 y y ′+ 2x y2 y ′+ x y2+ y3, y(1) = 2.
Tentemos:(x + y) x4 y ′+ 4(x + y) x3 y = 2(x + y) x y y ′+ (x + y) y2.
Realmente é verdade. Dividindo tudo por x + y obtemos então a equação exata
x4 y ′+ 4x3 y − 2x y y ′− y2 = 0, y(1) = 2,
que, por integração, nos leva a x4 y − x y2 = −2. Resolvendo em ordem a y e usando acondição inicial para decidir o sinal, chegamos a
y =x4+
p
x8+ 8x
2x.
15/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(1.20) Mais um exemplo. A fórmula (1.18) para a equação
2x y2 y ′+ 2y3 = 4x2 y, y(1) = 1,
fica (depois de simplificada)
µ′
µ=− −4y2+ 4x2
∂ s∂ x· 2x y2− ∂ s
∂ y· (2y3− 4x2 y)
.
Se s = x , obteríamosµ′
µ=−−4y2+ 4x2
2x y2 .
Veem alguma forma de simplificar isto de forma a eliminar o y? Eu também não.Com s = y , teríamos
µ′
µ=− −4y2+ 4x2
−2y3+ 4x2 y.
Infelizmente, por pouco (bastava que fosse um 4 em vez de um 2), também não consegui-mos livrar-nos do x .
Consideremos então s = y/x , com ∂ s∂ x= −y/x2 e ∂ s
∂ y= 1/x . (Em geral, está longe de
ser evidente qual um s que funcionará. Não se tratando de s = x nem de s = y , é mesmopreciso alguma pista adicional.) Nesse caso, a equação para µ fica
µ′
µ=− −4y2+ 4x2
− y · 2x y2
x2 − 2y3− 4x2 y
x
=4x2 (y2− x2)
−2x y3− x (2y3− 4x2 y)=
4x2 (y2− x2)−4x y (y2− x2)
=− x
y.
Ou seja, µ′
µ= −1
s. Assim, µ(s) = s−1 = x/y é um fator integrante (verifiquem, e tenham
cuidado com as coincidências). Multiplicando a equação original pelo fator integrante,obtemos
2x2 y y ′+ 2x y2− 4x3 = 0, y(1) = 1.
Integrando, obtemos x2 y2 − x4 = 0, que tem duas soluções diferenciáveis (verifiquem!):y = x e y =−x . Destas, só y = x é compatível com a condição inicial.
(1.21) Exercício. Resolvam a equação
6x y3 y ′+ 3y4 = 5x2 y2+ 4x3 y y ′, y(2) = 2,
sabendo que tem um fator integrante da forma µ(x y).
(1.22) EQUAÇÕES LINEARES DE PRIMEIRA ORDEM. Uma equação diferencial diz-se linear secorresponde a um problema linear (homogéneo ou não homogéneo). Em particular, nocaso homogéneo, o espaço das soluções é um espaço vetorial.
Assim, a equação (nesta secção vamos usar t como variável independente)
y ′+ t y = 0
16/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 1: EQUAÇÕES DIFERENCIAIS ORDINÁRIAS
é linear, pois a transformação T (do espaço C1 das funções com derivada contínua para oespaço C0 das funções contínuas) dada por
T (y) = y ′+ t · yé linear (sim?) e a equação original corresponde ao sistema (homogéneo) T (y) = 0.
Mais geralmente, uma equação linear de primeira ordem pode ser escrita na forma
y ′(t) = a(t) · y(t) + b(t)
e é sempre redutível a exata. Como habitualmente, abreviamo-la assim:
−a(t) · y − b(t)︸ ︷︷ ︸
P
+ 1︸︷︷︸
Q
·y ′ = 0.
Usando a equação (1.18) com s = t, ∂ s∂ t= 1, e ∂ s
∂ y= 0, obtemos (recordem que estamos a
usar t, e não x , como variável independente)
µ′
µ=−
∂Q∂ t︷︸︸︷
0 −∂ P∂ y
︷ ︸︸ ︷
−a(t)
1 ·Q− 0 · P =−a(t).
Nitidamente, o lado direito depende apenas de t, pelo que existe um fator integrante daforma µ(t). Resolvendo a equação, obtemos
log|µ(t)|=−∫
a(t)dt .
Assim, podemos escolherµ(t) = e−
∫
a(t)dt
como fator integrante. Se tivermos uma condição inicial em t = t0, será preferível escolheruma primitiva mais específica:
µ(t) = e−∫ t
t0a(s)ds
(reparem que tivemos que mudar a variável de integração—veem porquê?).Para simplificar as contas que se seguem, observamos desde já (a partir da equação
acima para µ′/µ) que µ′(t) =−a(t) ·µ(t). Multiplicando µ(t) na equação original, ficamoscom
µ(t) · y ′−µ(t) · a(t) · y = µ(t) · b(t).Mas isto é equivalente (verifiquem!) a
µ(t) · y′= µ(t) · b(t),
cuja solução é
µ(t) · y =∫
µ(t) · b(t)dt .
Se tivermos uma condição inicial y(t0) = y0, podemos ser mais específicos e dizer que
µ(t) · y(t)−µ(t0) · y0 =
∫ t
t0
µ(r) · b(r)dr
17/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(de novo, precisámos de mudar a variável de integração). Resolvendo em ordem a y(t),chegamos a (verifiquem!)
y(t) = e∫ t
t0a(s)ds · y0+
∫ t
t0
e∫ t
ra(s)ds · b(r)dr .
Esta é a fórmula de variação das constantes. Se olharem para uma equação diferencial ereconhecerem que é linear, podem usar esta fórmula diretamente, sem terem de perdertempo à procura de um fator integrante.
(1.23) À primeira vista, a fórmula de variação das constantes parece não ter um padrãosimples. Por isso, vale a pena explicar um pouco como traduzi-la em intuições sobre apassagem do tempo. Com efeito, podemos pensar que a função
e∫ t
ra(s)ds
codifica o efeito da passagem do tempo entre o instante r e o instante t. Chamemos-lhe porisso passagemt←r . Recordemos que a equação original era
y ′(t) = a(t) · y(t) + b(t), y(t0) = y0.
Intuitivamente, isto indica que a variação de y tem uma componente que depende do pró-prio y (portanto deveria envolver uma exponencial e a condição inicial—daí passagemt←r
envolver a exponencial) bem como uma contribuição adicional em cada instante r anteriora t, controlada por b(r). Isto é, a contribuição de y0 vê o tempo passar de t0 a t, enquantoque cada contribuição b(r) vê o tempo passar de r a t. Assim, o resultado deveria ser
y(t) = passagemt←t0 · y0+
∫ t
t0
passagemt←r · b(r)dr .
Se compararem com a fórmula de variação das constantes, veem que é exatamente isso oque ela diz.
Embora esta mnemónica possa parecer pouco fiável, a verdade é que há um conceitomuito geral de exponencial que codifica esta ideia de passagem do tempo. Por exemplo, aexponencial habitual (na reta real ou no plano complexo) corresponde a passagemt←r =et−r . As propriedades da exponencial correspondem a propriedades da passagem do tempo:dizer et−t = 1 é dizer passagemt←t = 1, e dizer et−s · es−r = et−r é dizer passagemt←s ·passagems←r = passagemt←r (ou seja, é dizer que fazer o tempo passar de r a s e depois des a t é equivalente a fazê-lo passar de r a t).
(1.24) Exercício. Aqui estão mais algumas equações de primeira ordem para resolverem:(a) y ′− sin t · y = sin t, y(0) =−2;(b) 3y2 y ′+ 2x y ′+ 2x + 2y = 0, y(0) = 2;(c) 6t y y ′+ 4y2 y ′+ 2y2 = y et + 2et y ′, y(4) = 0;(d) 2t2 y + t y y ′+ t y ′+ 3t et = t3+ 2y2 y ′+ 2y y ′+ 6y et , y(0) = 2.
Na última equação, precisam de um fator integrante do tipo µ(t − 2y).
18/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 1: EQUAÇÕES DIFERENCIAIS ORDINÁRIAS
(1.25) MUDANÇA DE VARIÁVEL. Por vezes, uma mudança de variável bem escolhida podeajudar a encontrar soluções de uma equação diferencial. Por exemplo, na equação
x + x y ′ = 2y
podemos substituir y(x) = u(x) x2. (Como esta mudança não é invertível em x = 0, sabe-mos desde logo que podemos não encontrar todas as soluções, ou que as que encontrarmospodem ter problemas, próximo de x = 0.) Como y ′ = u′ x2+2ux , substituindo na equaçãooriginal obtemos
x + x (u′ x2+ 2ux) = 2ux2,
que depois de simplificada se reduz a
x + u′ x3 = 0, ou u′ =− 1
x2 .
Somos assim levados a concluir que u= 1x+ C , e que
y = ux2 = x + C x2.
(1.26) Exercício. Usando a equação original em (1.25), o que podem concluir sobre y(0)?Mostrem que é possível escolher a solução em x < 0 independentemente da solução emx > 0 e determinem todas as soluções da equação diferencial em R.
(1.27) As substituições úteis nem sempre são óbvias, mas por vezes algum padrão na equa-ção pode sugerir opções a tentar. Por exemplo, em
y ′ = 3y + 3y2/3
é tentador livrarmo-nos da raiz cúbica usando y = u3 (que, naturalmente, pode esconderproblemas quando y = 0, pois embora nesse ponto a mudança de variável seja invertível—u = y1/3—, a inversa não é diferenciável). Substituindo y ′ = 3u2 u′ na equação original,obtemos (é preciso algum cuidado com os sinais na aritmética com expoentes fracionários)
3u2 u′ = 3u3+ 3u2, ou u′ = u+ 1.
(1.28) Exercício. Encontrem um fator integrante adequado para u′ = u+ 1 e determinemtodas as soluções dessa equação. Quais as soluções correspondentes para a equação originaly ′ = 3y + 3y2/3? Há mais soluções?
(1.29) Exercício. Usem substituições adequadas para resolver as seguintes equações.(a) y ′ = 2y + 4y3/4, y(0) = 1.(b) y ′ = 4y + 2y1/4, y(1) = 1.(c) cos y y ′ = et + sin y , y(1) = 0.(d) y ′ = t e2t y + 2y log y , y(2) = 1.
Basta identificarem uma solução, mas tentem perceber se pode haver mais.
19/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(1.30) RESPOSTAS DE EXERCÍCIOS.
(1.3) basta exigir − 14A1 + B1 =− 1
4A2 + B2.
(1.4) (a) y(t) = 13
t3 + 2, t ∈ R.
(b) y(x) =Æ
x3+23
, x >− 3p
2.
(c) y(x) =−Æ
x3+23
, x >− 3p
2.(d) f (t) = t
2, t ∈ R.
(e) f (t) = t2+ 2
t, se t < 0; f (t) = t
2+ C
t, se
t > 0.(f) u(x) = C exp(− 1
x) (com C 6= 0), se x < 0;
u(x) =−exp(1− 1x), se x > 0.
(1.6) y(x) = 2 exp( x2
2− x).
(1.7) y(x) = exp(2− e−x)− 1.
(1.8) y(t) = tan( t2
2+ t), para
−1−p1+π < t <−1+p
1+π.
(1.9) (a) y(t) =1
C − 3t − t2
2
.
(b) o maior intervalo contendo a condiçãoinicial e excluindo os pontos −3±p9+ 2C .(c) y(t) = 0. (f) y(t) = 0.
(1.10) (a) y(t) = C(t + 3) (com C ∈ R).
(b) y(t) =1
C − log|t + 3| (com C ∈ R, e no
maior intervalo excluindo zeros dodenominador) ou y(t) = 0.
(c) y(t) =C
p
|t2 − 1|(com C 6= 0, e no maior
intervalo excluindo t =±1) ou y(t) = 0.
(1.13) (a) y(x) =p
1+ x − x2.
(b) y(x) =cos x −
p
(cos x)2 + 24
2.
(c) y(x) =cos x +
p
(cos x)2 − 4x3 + 4xπ2
2x.
(d) y(x) = x3/2.
(e) y(x) =1− x4 −
p
(x4 − 1)2 + 4x (x + 3)−2x
.
(f) y(x) =4
cos(πx)− 1+ x2 .
(g) y(x) = x2 − 2x + 3.
(1.17) (alguns dos fatores integrantes possíveis,seguidos da solução)
(a) x−2; y(x) =(e+ 1)2
ex + 1x
.
(b) sin x ou y−1; y(x) =2
sin x.
(c) y; y(x) =1
x.
(d) y−1; y(x) =3− ex +
p
(ex − 3)2 − 4x
2.
(1.21) um fator possível é x2 y2; y(x) = x .
(1.24) (a) y(t) =−1− exp(1− cos t).(b) solução implícita de y3 + 2x y + x2 = 8.(c) um fator possível é y; y(x) = 0.(d) um fator possível é (t − 2y)−1;
y(t) =−1+Æ
15− 6et + 23
t3.
(1.26) y(0) = 0. y(x) = x + C1 x2 se x < 0;y(x) = x + C2 x2 se x > 0.
(1.28) u(t) = Cet − 1 (com C ∈ R).y(t) = (Cet − 1)3. y(t) = 0 e ainda colagens desoluções dos dois tipos (vejam o exercício (2.26)para mais pistas).
(1.29) (a) y(t) = (3et/2 − 2)4.(b) y(t) =
32e3t−3 − 1
2
4/3.(c) y(t) = arcsin(tet − et).(d) y(t) = exp
t2
2e2t − 2e2t.
O exercício (2.27) dá algumas pistas sobre asoutras soluções.
20/99
Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 2
EXISTÊNCIA DE SOLUÇÕES DE EDOs
Nada do que vimos até aqui nos dá indicações sobre a existência ou unicidade das soluçõesde uma equação diferencial. Como discutimos na introdução, em geral esperamos que, sedois carros começam a viagem lado a lado e as suas velocidades variam da mesma formaao longo do tempo, então deveriam continuar lado a lado ao longo de toda a viagem.
Começamos por falar um pouco dos retratos de fase. Depois vemos que as equaçõesdiferenciais podem ser convertidas em equações integrais, para as quais uma discussão algotécnica nos dá um critério simples com que assegurar existência e unicidade das soluções. Àprimeira vista, o critério parece restringir-nos a intervalos mais limitados do que queremos,mas vamos ver que por vezes é possível prolongar as soluções (sempre de forma única) aintervalos maiores.
(2.1) RETRATOS DE FASE. Para percebermos melhor o que acontece, vamos recorrer aos re-tratos de fase. A ideia fica mais clara se começarmos com duas variáveis dependentes. Ima-ginem que queremos perceber as soluções de
x ′1(t) =−x2(t), x ′2(t) = x1(t).
Podemos escrever isto de forma mais compacta pondo x(t) = (x1(t), x2(t)) e dizendo quea equação é
x′(t) = F(x(t)),
onde F é um campo vetorial dependente de x(t) (F poderia depender também de t, masneste exemplo isso não se passa). Nestes termos, o que queremos é encontrar um caminhox parametrizado por t, cujo vetor velocidade seja F(x(t)). Equações com a mesma F mascondições iniciais diferentes, corresponderão a caminhos diferentes no retrato de fase (que éessencialmente uma representação do campo vetorial F). Em geral, não convém representaras velocidades na mesma escala que as posições (de outra forma, a figura tende a ficarconfusa).
(2.2) Quando temos só uma variável dependente, faz sentido incluir também a variável in-dependente no retrato de fase. Não só é mais fácil percebermos o gráfico das soluções dessaforma (por exemplo, se t for a variável independente e y a variável dependente, podemosler diretamente os gráficos das soluções y(t)), mas também porque F pode perfeitamentedepender da variável independente.
Por exemplo, voltemos à equação do exercício (1.9):
y ′ = (3+ t) y2.
21/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
Se pusermos v(t) = (t, y(t)) ∈ R2, temos v′(t) = (t ′, y ′) = (1, y ′). Assim, a equação podeser reescrita como
v′(t) = F(v(t)), onde F(t, y) = (1, (3+ t) y2).
Isto dá-nos um novo retrato de fase, que revela as soluções correspondentes.
(2.3) O TEOREMA DE PICARD–LINDELÖF dá-nos condições concretas sob as quais uma equa-ção diferencial (com condição inicial) tem solução única. Para fixar ideias, vamos trabalharcom vetores em Rn. (Nas figuras vamos usar n = 1, apenas por uma questão de clareza.)Supondo que F(t,x) está definida nos pontos que usarmos, o nosso objetivo é decidir se aequação
x′(t) = F(t,x(t)), x(t0) = x0
tem solução e essa solução é única.Se a equação tiver uma solução x(t), então
x(t)− x0 = x(t)− x(t0) =
∫ t
t0
x′(s)ds =
∫ t
t0
F(s,x(s))ds .
Ou seja, a solução, a existir, satisfaz a igualdade
x(t) = x0+
∫ t
t0
F(s,x(s))ds .
Isto sugere que, dada uma função x : t 7→ x(t), usemos
x0+
∫ t
t0
F(s,x(s))ds .
como definição de uma nova função, à qual chamaremos (à falta de melhor nome) Φ(x).Nessa linguagem, x é uma solução da equação original precisamente quando Φ(x) = x forsatisfeita.
Ora, isto sugere a seguinte estratégia: começamos com uma função x(0) qualquer (porexemplo, x(0)(t) = 0), e definimos recursivamente x(n+1) = Φ(x(n)). Se tudo correr bem, olimite destas iteradas de Picard é uma solução da equação original.
22/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 2: EXISTÊNCIA DE SOLUÇÕES DE EDOS
(2.4) Como isto é algo confuso, é melhor vermos um exemplo. Considerem a equação (nãovamos usar notação vetorial, porque estamos em R1)
x ′(t) = x(t), x(0) = 1.
A função F correspondente é dada por F(t, x) = x , enquanto que Φ é definida por (notemque, conforme o contexto, usamos x para denotar um real, ou para denotar uma função devalores reais)
Φ(x)(t) = 1+
∫ t
0
x(s)ds .
(Verifiquem que tudo isso faz sentido, e que nesta fórmula x é sempre uma função.)Assim, se começarmos com x(0)(t) = 0, temos
x(1)(t) = 1+
∫ t
0
x(0)(s)ds = 1+
∫ t
0
0ds = 1;
x(2)(t) = 1+
∫ t
0
x(1)(s)ds = 1+
∫ t
0
1ds = 1+ t;
x(3)(t) = 1+
∫ t
0
x(2)(s)ds = 1+
∫ t
0
(1+ s)ds = 1+ t + t2
2.
(2.5) Exercício. Determinem ainda x(4) e x(5). Qual acham que é a fórmula para x(n)(t)?Conseguem prová-la? Qual a função limite?
(2.6) Exercício. Suponham que tínhamos começado com x(0)(t) = 1. Quais seriam as fun-ções x(1), x(2), x(3) correspondentes? E se começássemos com x(0)(t) = t?
(2.7) Exercício. E se a condição inicial fosse x(2) = −3, quem seria Φ(x)(t)? Começandocom x(0)(t) = 0, quem seriam as iteradas x(1), x(2), x(3) correspondentes?
(2.8) Exercício. Considerem a equação
x ′(t) = 4− x(t), x(1) = 3.
Quem são F(t, x) e Φ(x)(t)? Partindo de x(0)(t) = 1, determinem x(3).
(2.9) Exercício. Considerem a equação
y ′ ex = 1+ y, y(0) = e− 1.
do exercício (1.7). Quem são F(x , y) e Φ(y)(x)? Partindo de y(0)(x) = 1, determinem y(2).
(2.10) Exercício. Qual a equação diferencial e respetiva condição inicial associadas a
Φ(u)(t) =−2+
∫ t
2
s+ u(s)ds?
Se u(0)(t) = 1 e u(n+1) = Φ(u(n)), qual o valor de limn→∞ u(n)(t)?
23/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(2.11) CONSTANTES DE LIPSCHITZ E OPERADORES CONTRATIVOS. É claro que nada garante queas coisas corram bem. Para isso, precisamos de uma discussão algo técnica. Se a quiseremsaltar, continuem no (2.21).
Vamos então assumir que F(t,x) está definida num aberto contendo (t0,x0). Além disso,vamos assumir que F é contínua, e localmente Lipschitz em relação a x. Recordem que aúltima condição significa que, para cada ponto no domínio de F, existe uma constante C euma vizinhança do ponto tais que
‖F(t,y1)− F(t,y2)‖ ≤ C
y1− y2
para quaisquer dois vetores (t,y1) e (t,y2) na vizinhança. (Uma tal constante é chamadauma constante de Lipschitz.) Notem que esta condição é satisfeita se F for C1 (e este é o casomais frequente).
(2.12) Exercício?. Mostrem que se F é diferenciável, então é localmente Lipschitz se e sóse as suas derivadas são localmente limitadas (isto é, se existe uma vizinhança de cada t,xonde as derivadas são limitadas).
(2.13) Assumindo por um momento que não há problemas com os domínios das funções,dadas duas funções y1(t) e y2(t), temos então
Φ(y1)(t) = x0+
∫ t
t0
F(s,y1(s))ds,
Φ(y2)(t) = x0+
∫ t
t0
F(s,y2(s))ds,
Φ(y1)(t)−Φ(y2)(t) =
∫ t
t0
F(s,y1(s))− F(s,y2(s))ds,
donde se segue que
‖Φ(y1)(t)−Φ(y2)(t)‖=
∫ t
t0
F(s,y1(s))− F(s,y2(s))ds
≤∫ t
t0
‖F(s,y1(s))− F(s,y2(s))‖ds
≤ C
∫ t
t0
‖(s,y1(s))− (s,y2(s))‖ds ≤ C D |t − t0|,
se chamarmos D à distância máxima entre y1(s) e y2(s) (para os valores de s usados). Alémdisso,
‖Φ(y1)(t)− x0‖=
∫ t
t0
F(s,y1(s))ds
=
∫ t
t0
‖F(s,y1(s))‖ds ≤ M |t − t0|,
se chamarmos M ao máximo de ‖F(s,y1(s))‖ (para os valores de s usados).Voltemos então ao t0 e ao x0 que definem a condição inicial. Como F está definida e é
Lipschitz numa vizinhança de (t0,x0), podemos escolher D > 0 e ε > 0 tais que
|t − t0|< ε e ‖x− x0‖ ≤ D ⇒ (t,x) ∈ domínio de F.
Sendo M o supremo de ‖F(t,x)‖ (para |t − t0| < ε e ‖x − x0‖ ≤ D) e C a constante deLipschitz de F nessa vizinhança, encolhemos ε (se necessário) até que Cε < 1 e Mε < D(veem como?).
24/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 2: EXISTÊNCIA DE SOLUÇÕES DE EDOS
(2.14) Consideramos então o espaço vetorial V das funções ]t0−ε, t0+ε[→ Rn contínuase limitadas, e nele definimos a seguinte norma:
‖y‖V = supt:|t−t0|<ε
‖y(t)‖.
Podemos assim falar em convergência de sucessões (yn → y significa ‖yn − y‖V → 0) e desucessões de Cauchy (yn é uma sucessão de Cauchy se ‖ym− yn‖V → 0 quando m, n→∞).
(2.15) Exercício. Mostrem que V é realmente um espaço vetorial.
(2.16) Exercício. Mostrem ainda as três propriedades relevantes da norma:(a) se ‖y‖V = 0, então y(t) = 0;(b) ‖y1+ y2‖V ≤ ‖y1‖V + ‖y2‖V ;(c) se λ ∈ R, então ‖λy‖V = |λ| ‖y‖V .
(2.17) Exercício?. Mostrem que ‖yn−y‖V → 0 (aquilo que acima escrevemos como yn→ y)significa que yn converge uniformemente para y.
(2.18) Exercício?. Mostrem que as sucessões de Cauchy em V convergem. Para isso, consi-deramos uma sucessão de Cauchy yn. Isto significa que
‖ym− yn‖V → 0 quando m, n→∞.
Queremos construir uma função y ∈ V e mostrar que yn converge uniformemente para y.(a) Para cada t ∈ ]t0− ε, t0+ ε[, mostrem que yn(t) é uma sucessão de Cauchy em R.(b) Construam uma função y : ]t0− ε, t0+ ε[→ R que seja limite pontual de yn.(c) Mostrem que yn→ y uniformemente.(d) Mostrem que y ∈ V .
(2.19) Consideramos então o subconjunto Y ⊆ V das funções y cujos valores satisfazem‖y(t)− x0‖ ≤ D. Tudo o que fizemos acima assegura-nos que se y está em Y então tambémΦ(y) está em Y . (Verifiquem!!)
Dadas duas funções y1,y2 ∈ Y , vimos há pouco que
‖Φ(y1)(t)−Φ(y2)(t)‖ ≤ C
∫ t
t0
y1(s)− y2(s)
ds,
ou seja (verifiquem!),‖Φ(y1)−Φ(y2)‖V ≤ Cε ‖y1− y2‖V ,
onde Cε < 1. (Quando esta desigualdade é válida com uma constante menor que 1, dizemosque Φ é um operador contrativo.)
Mas nós tínhamos dito que x era uma solução da equação diferencial precisamente seΦ(x) = x. Suponham então que y1 e y2 são duas soluções. Nesse caso, temos
‖Φ(y1)︸ ︷︷ ︸
y1
−Φ(y2)︸ ︷︷ ︸
y2
‖V = ‖y1− y2‖V ≤ Cε ‖y1− y2‖V .
25/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
Mas como Cε < 1, isto só é possível se ‖y1− y2‖V = 0, ou seja, se y1 = y2. Isto mostra que,a existir solução da equação diferencial, essa solução está unicamente definida (pelo menosno intervalo |t − t0|< ε).
Mas será que existe alguma solução? Fazemos o seguinte: escolhemos um qualquerponto de partida x(0) e construímos a sucessão definida por x(n+1) = Φ(x(n)). Vamos verificarque x(n) é uma sucessão de Cauchy.
(2.20) Exercício. Para abreviar um pouco, pomos R= Cε.(a) Mostrem que ‖x(n+1)− x(n+2)‖V ≤ R‖x(n)− x(n+1)‖V .(b) Usem a desigualdade triangular para mostrar que, para k inteiro positivo,
‖x(n)− x(n+k)‖V ≤ ‖x(n)− x(n+1)‖V + ‖x(n+1)− x(n+2)‖V + · · ·+ ‖x(n+k−1)− x(n+k)‖V .
(c) Mostrem que, para k inteiro positivo,
‖x(n)− x(n+k)‖V ≤Rn− Rn+k
1− R· ‖x(0)− x(1)‖V <
Rn
1− R· ‖x(0)− x(1)‖V .
(d) Mostrem que x(n) é uma sucessão de Cauchy.(e) Mostrem que o limite de x(n) também está em Y .
(2.21) PROLONGAMENTO DE SOLUÇÕES. Resumindo. . . Uma equação diferencial
x′(t) = F(t,x(t)), x(t0) = x0,
onde F é localmente Lipschitz, tem uma única solução definida nalguma vizinhança de t0.Vamos mostrar que existe um intervalo máximo (contendo t0) no qual a solução é única.
Lembram-se que no final de (2.13) encolhemos o intervalo de definição de modo a terCε < 1? De facto, em subintervalos de comprimento ε ou menor, o teorema de Picard–Lindelöf aplica-se (veem porquê?). Fazemos então o seguinte: dividimos o intervalo ori-ginal em subintervalos de comprimento ε. No subintervalo que contém a condição inicial,encontramos a (única) solução, e usamo-la para decidir a condição inicial no subintervalo àesquerda e no à direita. Dessa forma, vamos prolongando a solução para a esquerda e paraa direita, sempre com solução única (porquê?). Só somos forçados a parar quando saímosdo intervalo original, ou do conjunto onde a constante de Lipschitz C é válida.
Assim, vemos que há apenas duas formas de perder unicidade de solução: ou ao longode t chegamos a um ponto onde F não é localmente Lipschitz, ou x “foge” de qualquerconjunto limitado (isto é, tem uma assíntota em alguma das variáveis).
(2.22) Exercício. Considerem a equação y ′ =−e−y .(a) Encontrem conjuntos nos quais se aplique o teorema de Picard–Lindelöf.(b) Qual a solução geral da equação? Contradiz alguma das nossas conclusões sobre
possibilidade de prolongamento de soluções?
26/99
Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 2: EXISTÊNCIA DE SOLUÇÕES DE EDOS
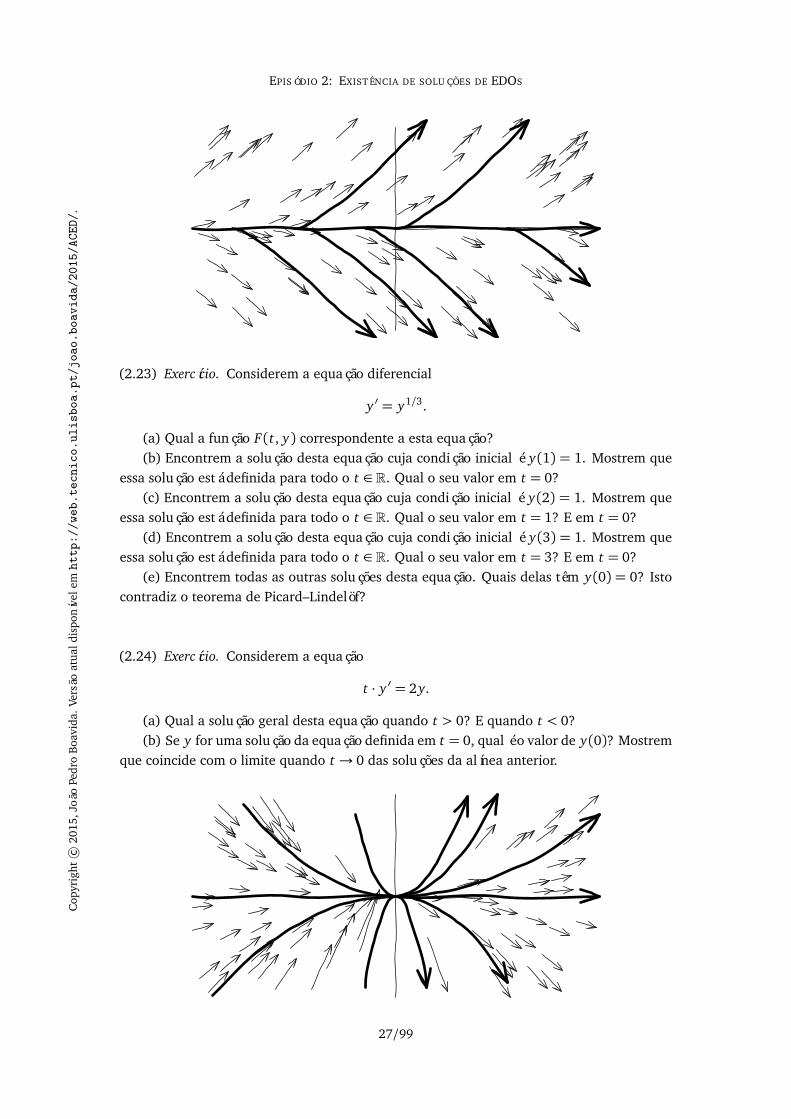
(2.23) Exercício. Considerem a equação diferencial
y ′ = y1/3.
(a) Qual a função F(t, y) correspondente a esta equação?(b) Encontrem a solução desta equação cuja condição inicial é y(1) = 1. Mostrem que
essa solução está definida para todo o t ∈ R. Qual o seu valor em t = 0?(c) Encontrem a solução desta equação cuja condição inicial é y(2) = 1. Mostrem que
essa solução está definida para todo o t ∈ R. Qual o seu valor em t = 1? E em t = 0?(d) Encontrem a solução desta equação cuja condição inicial é y(3) = 1. Mostrem que
essa solução está definida para todo o t ∈ R. Qual o seu valor em t = 3? E em t = 0?(e) Encontrem todas as outras soluções desta equação. Quais delas têm y(0) = 0? Isto
contradiz o teorema de Picard–Lindelöf?
(2.24) Exercício. Considerem a equação
t · y ′ = 2y.
(a) Qual a solução geral desta equação quando t > 0? E quando t < 0?(b) Se y for uma solução da equação definida em t = 0, qual é o valor de y(0)? Mostrem
que coincide com o limite quando t → 0 das soluções da alínea anterior.
27/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(c) Usem as alíneas anteriores para construir todas as soluções da equação definidas emR. Em que pontos do domínio se aplica o teorema de Picard–Lindelöf?
(2.25) Exercício. Encontrem todas as soluções de
y ′ = 2y1/2 se y > 0 e y ′ = 0 caso contrário.
(2.26) Exercício. Considerem de novo a equação
y ′ = 3y + 3y2/3
do exemplo (1.27) e dos exercícios que se seguem. Que valores de t e y satisfazem ashipóteses do teorema de Picard–Lindelöf? Determinem todas as soluções da equação.
(2.27) Exercício. Considerem de novo as soluções que encontraram para as equações doexercício (1.29).
(a) y ′ = 2y + 4y3/4, y(0) = 1.(b) y ′ = 4y + 2y1/4, y(1) = 1.(c) (cos y) y ′ = et + sin y , y(1) = 0.(d) y ′ = t e2t y + 2y log y , y(2) = 1.
Qual o maior intervalo onde as soluções são únicas? Quais as soluções fora desse intervalo?
(2.28) Exercício. Considerem a equação
y ′ = 1+ |y|1/2.
(a) Mostrem que todas as soluções são funções crescentes.(b) Encontrem expressões para as soluções, quando y > 0. (Pode ser útil usar y = u2.)(c) Encontrem expressões para as soluções, quando y < 0. (Pode ser útil usar y =−u2.)(d) Encontrem todas as soluções, e mostrem que, apesar desta equação não satisfazer
as hipóteses do teorema de Picard–Lindelöf, a conclusão é verdadeira.
(2.29) Exercício. De facto, é possível mostrar a existência e unicidade de soluções numaberto Ω no qual
(t,y1), (t,y2) ∈ Ω ⇒ ‖F(t,y1)− F(t,y2)‖ ≤ C ‖y1− y2‖.
Para tal, consideramos o espaço V das funções definidas num intervalo ]a, b[ contendo t0.(a) Se a < 0< b e a < t < b, mostrem que
∫ t
0
CeC |s|−C |t| ds
< 1− e−C max|a|,|b|.
(b) Se a < t0 < b e a < t < b, mostrem que
∫ t
t0
CeC |s−t0|−C |t−t0| ds
< 1− e−C |b−a|.
28/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 2: EXISTÊNCIA DE SOLUÇÕES DE EDOS
(c) Verifiquem que
y
′V = sup
a<t<b
e−C |t−t0| ‖y(t)‖
.
é uma norma em V . Tenham cuidado para não confundir
y
′V com ‖y(t)‖.
(d) Mostrem que
Φ(y1)−Φ(y2)
′V <
1− e−C |b−a| y1− y2
′V .
(e) O que podem concluir sobre existência e unicidade de soluções de x′(t) = F(t,x(t))em Ω? Que detalhes é preciso ter em conta sobre a relação entre ]a, b[ e Ω?
(2.30) COMPARAÇÃO DE SOLUÇÕES. Digamos que y(t) é solução de y ′(t) = F(t, y(t)) comcondição inicial y(t0) = y0 e que z(t) é solução de z′(t) = G(t, z(t)) com condição inicialz(t0) = z0. Se y0 ≤ z0 e F(t, y) ≤ G(t, z) sempre que y ≤ z (notem que aqui y e z sãovalores, não funções), conseguimos mostrar que y(t)≤ z(t) sempre que t > t0?
Se pudermos usar o teorema de Picard–Lindelöf, a resposta é sim.
(2.31) Exercício. Começamos por ver o que se passa quando y0 < z0.(a) Mostrem que se F(t, y(t)) > G(t, z(t)) para algum t > t0, então z(t)− y(t) não
pode ser uma função crescente.(b) Mostrem que nesse caso existe algum t1 > t0 com z′(t1)− y ′(t1) < 0, mas z(t)−
y(t)> 0 no intervalo ]t0, t1[.(c) Mostrem que isso contradiria as condições sobre F e G.
(2.32) Exercício. Consideramos agora o que se passa se y0 = z0, e assumimos que G satisfazas condições do teorema de Picard–Lindelöf.
(a) Mostrem que se z(t1) < y(t1) para algum t1 > t0, é possível escolher uma soluçãow(t) de w′(t) = G(t, w(t)) (notem que é a mesma equação satisfeita por z(t)) com w(t0)>z(t0) = z0 = y0 e z(t1)< w(t1)< y(t1).
(b) Mostrem que isso contradiria as conclusões do exercício anterior.
(2.33) Exercício. Considerem as equações w′ = −w, y ′ = y sin y , e z′ = z, com condiçãoinicial w(0) = y(0) = z(0)> 0. Mostrem que se t > 0, então w(t)< y(t)< z(t).
(2.34) Exercício. Mostrem que as soluções de y ′ = e−y2e as de z′ = z e−z2
estão definidasem toda a reta real.
29/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(2.35) RESPOSTAS DE EXERCÍCIOS.
(2.5) 1+ t + t2
2+ t3
6; 1+ t + t2
2+ t3
6+ t4
24.
∑
0≤k<n
tk
k!. t 7→ et .
(2.6) as anteriores x(2), x(3), x(4).
1+ t2
2; 1+ t + t3
6; 1+ t + t2
2+ t4
24.
(2.7) Φ(x)(t) =−3+∫ t
2x(s)ds.
−3; 3− 3t; −3+ 3t − 32
t2.
(2.8) F(t, x) = 4− x .Φ(x)(t) = 3+
∫ t
14− x(s)ds.
x(3)(t) = 1+ 72
t − 2t2 + 12
t3.
(2.9) F(x , y) = e−x + ye−x .Φ(y)(x) = e− 1+
∫ x
0e−s + y(s) e−s ds.
y(2)(x) = 2e− 2e−x − e1−x + e−2x .
(2.10) u′ = t + u; u(2) =−2.u(t) = et−2 − t − 1.
(2.22) (b) y(t) = log(C − t).
(2.23) (a) F(t, y) = y1/3.(e) y(t) =
23
t + C3/2 se t ≥− 3
2C e y(t) = 0
caso contrário; ou y(t) = 0 em todo o R.
(2.24) (a) y(t) = C t2 (em ambos os casos).(b) y(0) = 0.(c) escolher uma constante para t ≤ 0 e outra(ou a mesma) para t ≥ 0; aplica-se em t 6= 0.
(2.25) y(t) = (t − C)2 se t ≥ C e y(t) = 0 casocontrário. y(t) = C , com C ≤ 0.
(2.26) y 6= 0. y(t) = (Cet − 1)3; y(t) = 0;y(t) =−1. As soluções do primeiro tipocruzam-se com as do segundo em t =− log C;nesses pontos também podemos trocar de umtipo para outro.
(2.27) (a) ]2 log(2/3),+∞[. É possível colarcom y(t) = 0 à esquerda de t = 2 log(2/3), eainda mais à esquerda também é possível colarcom outras soluções da formay(t) = (Cet/2 − 2)4.(b) ]1− 1
3log3,+∞[. É possível fazer colagens
como em (a).(c) ]−∞,α[, onde (α− 1)eα = 1. (d) R.
(2.28) (b) y(t) = u(t)2, onde u(t) é soluçãoimplícita de 2u− 2 log(1+ u) = t − C e t > C .(c) y(t) =−u(t)2, onde u(t) é solução implícitade 2u− 2 log(1+ u) = C − t e t < C .
30/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 3
EDOs EM Rn E EXPONENCIAIS DE MATRIZES
Nos episódios anteriores falámos principalmente sobre equações diferenciais de primeiraordem, com uma única incógnita. Mas se tivermos um sistema como
(
x ′1 = x2,
x ′2 =−42x1+ 13x2,
podemos escrevê-lo na forma matricial
x1
x2
′
︸ ︷︷ ︸
x′
=
0 1−42 13
︸ ︷︷ ︸
A
x1
x2
︸ ︷︷ ︸
x
.
Considerem a mudança de variável x= Su, com
S =
1 17 6
.
Nesse caso, a equação x′ = Ax fica Su′ = ASu. Se escrevermos J = S−1AS, temos SJ = AS,ou seja, a equação fica Su′ = SJu ou (multiplicando à esquerda por S−1, de ambos os lados,e simplificando) u′ = Ju. Chegamos portanto a
u′ =
7 00 6
u, ou
(
u′1 = 7u1,
u′2 = 6u2,
As duas funções u1(t) e u2(t) ficam completamente independentes, com equações que jásabemos resolver. Isto acontece quando a matriz J é diagonal (e portanto a matriz originalA é diagonalizável). Quando as matrizes não são diagonalizáveis, usamos a forma canónicade Jordan.
Neste episódio, vamos considerar principalmente equações da forma
Y ′(t) = A · Y (t) + B(t),
onde Y (t) e B(t) são matrizes n×m e A é uma matriz n×n. Se chamarmos y1(t), . . . ,ym(t)às colunas de Y (t) e b1(t), . . . ,bm(t) às de B(t), essa equação é equivalente às m equações
y′1(t) = A · y1(t) + b1(t), . . . , y′m(t) = A · ym(t) + bm(t).
Desta forma, a notação matricial permite-nos representar várias equações simultaneamente.Omitiremos por vezes a variável t em y(t) ou Y (t), escrevendo apenas y ou Y .
31/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(3.1) EXPONENCIAL DE MATRIZES. Vamos chamar exponencial de A (ou de At) à solução M de
M ′(t) = A ·M(t), M(0) = Id .
(O teorema de Picard–Lindelöf garante que uma tal solução existe e é única. Conseguemverificar os detalhes?) Então a derivada de
Y (t) = M(t) · Y0 é Y ′(t) = M ′(t) · Y0 = A ·M(t) · Y0 = A · Y (t),mostrando que essa Y (t) é a única solução—de novo por Picard–Lindelöf—de
Y ′(t) = A · Y (t), Y (0) = Y0.
Sabendo isso, podemos verificar que (considerando s constante)
M(t) ·M(s) = M(t + s),
pois (verifiquem!) ambas as expressões são (a única) solução de
Y ′(t) = A · Y (t), Y (0) = M(s).
Por essa razão, podemos concluir que
M(t) ·M(−t) = M(0) = Id .
Ou seja, M(t) é uma matriz invertível e a sua inversa é M(−t). Da mesma forma, podemosver que
M(t) · A− A ·M(t) = 0,
pois (verifiquem também aqui) ambas as expressões são (a única) solução de
Y ′(t) = A · Y (t), Y (0) = 0.
Concluímos portanto queM(t) · A= A ·M(t),
isto é, a exponencial de A comuta com A. A um nível mais profundo, a matriz M(t) descreveo efeito da passagem do tempo. O facto de M(t) comutar com A está relacionado comM(t) · M(s) = M(t + s) (que poderia traduzir-se por “a passagem de tempo s seguida dapassagem de tempo t é equivalente à passagem de tempo t + s”). Ambos são cruciais paraque uma abordagem simplificada às equações em Rn seja possível. (Daí focarmo-nos nocaso em que A é constante.)
Resumindo tudo isto: usando a notação eAt em vez de M(t), acabámos de mostrar queeAt · Y0 é a única solução de Y ′(t) = A · Y (t) com condição inicial Y (0) = Y0. Mostrámos(confirmem!) também as identidades
eA(t+s) = eAt · eAs, (eAt)−1 = e−At , e eAt · A= A · eAt = (eAt)′.
(3.2) Exercício. Conseguem mostrar que se A e B comutam, então
eAt · B = B · eAt e eAt · eBt = e(A+B) t?
O raciocínio é o mesmo que antes: mostrar que ambos os lados de cada equação são (aúnica) solução de uma mesma equação diferencial.
32/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 3: EDOS EM Rn E EXPONENCIAIS DE MATRIZES
(3.3) A FÓRMULA DE VARIAÇÃO DAS CONSTANTES para matrizes n×m pode ser obtida com umraciocínio semelhante ao que fizemos em (1.22). Um “fator integrante” (se nos permitirmosusar tal designação neste caso) para a equação
Y ′(t) = A · Y (t) + B(t)
é e−At multiplicado à esquerda, pois a equação torna-se
e−At Y ′(t)− e−At · A · Y (t) = e−At · B(t),que é equivalente (verifiquem!) a
e−At · Y (t)′= e−At · B(t).
Se tivermos uma condição inicial em t = t0, podemos integrar e obter
e−At · Y (t)− e−At0 · Y (t0) =
∫ t
t0
e−Ar · B(r)dr .
Tal como no caso n= 1, resolvemos em ordem a Y (t) e chegamos a
Y (t) = eA(t−t0) · Y (t0) +
∫ t
t0
eA(t−r) · B(r)dr .
E tal como antes, podemos interpretar isto como
Y (t) = passagemt←t0 · Y (t0) +
∫ t
t0
passagemt←r · B(r)dr .
(3.4) Um exemplo concreto permite-nos ilustrar tudo isto. A solução de
y′(t) =
−8 1−4 −12
︸ ︷︷ ︸
A
y(t) +
1+ t2− 2t
︸ ︷︷ ︸
b(t)
, y( 0︸︷︷︸
t0
) =
01
︸ ︷︷ ︸
y0
é dada por
y(t) = eAt
e−At0y0+
∫ t
t0
e−Arb(r)dr
.
Em (3.20), vamos ver que
eAt = e−10t
1+ 2t t−4t 1− 2t
.
Substituindo na função integranda, temos
e−Arb(r) = e10r
1− 2r −r4r 1+ 2r
1+ r2− 2r
= e10r
1− 3r2+ 6r
=
e10r (1− 3r)e10r (2+ 6r)
.
Assim, o integral fica∫ t
0
e−Arb(r)dr =
∫ t
0
e10r (1− 3r)e10r (2+ 6r)
dr =
∫ t
0e10r (1− 3r)dr
∫ t
0e10r (2+ 6r)dr
.
(3.5) Exercício. Terminem as contas e obtenham a expressão simplificada (sem integrais)para y(t).
33/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(3.6) CÁLCULO DE eAt . Há várias estratégias para calcular eAt . Começamos por observar quese Y (t) é uma solução de Y ′(t) = A · Y (t), então Y (t) = eAt · Y (0) permite-nos concluir queY (t) é invertível exatamente quando Y (0) o for (e portanto, quando qualquer outra Y (t0)o for).
Assim, suponhamos que A é uma matriz n×n e que temos n soluções y1(t), . . . ,yn(t) de
y′(t) = A · y(t).Então a matriz Y (t) com colunas y1(t), . . . ,yn(t) é uma solução de
Y ′(t) = A · Y (t),logo é da forma Y (t) = eA(t−t0) · Y (t0). Se os vetores y1(t), . . . ,yn(t), para algum t fixo,forem linearmente independentes, a matriz Y (t) será invertível. E vimos há pouco quenesse caso a matriz Y (t0) é invertível. Somos assim levados a concluir que
eA(t−t0) = Y (t) · Y (t0)−1.
Esta construção de eAt corresponde à matriz wronskiana. Se Z(t) for uma solução de
Z ′(t) = A · Z(t),podemos escrever
Z(t) = eA(t−t0) · Z(t0) = Y (t) · Y (t0)−1 · Z(t0).
(3.7) EXPONENCIAL DE MATRIZ DIAGONAL. Voltemos então a um exemplo do início deste epi-sódio. Queremos encontrar todas as soluções do sistema
y′ = A · y, onde A=
7 00 6
.
Neste caso, é fácil ver que v1 = 1
0
gera os vetores próprios com λ = 7 e que v2 = 0
1
gera os vetores próprios com λ= 6.Se v é um vetor próprio de A com valor próprio λ, então y = eλtv é uma solução de
y′ = A · y. Com efeito, temos
y′ =
eλt · v′ = eλt′ · v= eλt · λv︸︷︷︸
Av
= eλt · Av= A · eλtv= A · y.
No caso da nossa equação, temos então duas soluções (que são linearmente indepen-dentes pois os próprios vetores v1 e v2 o são):
y1(t) = e7tv1 =
e7t
0
e y2(t) = e6tv2 =
0e6t
.
Com estes dois vetores, podemos construir a matriz
Y (t) =
y1(t) y2(t)
=
e7t 00 e6t
.
Como neste caso Y (0) = Id, vemos que eAt = Y (t) · Y (0)−1 = Y (t). Ou seja, a matrizexponencial associada a uma matriz diagonal é também ela uma matriz diagonal: cadavalor próprio λ é substituído por eλt .
34/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 3: EDOS EM Rn E EXPONENCIAIS DE MATRIZES
(3.8) Exercício. Usem a fórmula da variação das constantes em R2 para resolver
y′(t) =
7 00 6
y(t) +
t−1
, y(0) = 0.
Comparem com o que obteriam escrevendo como sistemas de equações a uma variável eresolvendo cada equação usando (1.22).
(3.9) Exercício. Vamos provar que se A · S = S · B, então eAt · S = S · eBt . Vamos usarum raciocínio semelhante ao que fizemos no exercício (3.2) e imediatamente antes. TantoeAt · S − S · eBt como a matriz 0 são (a única) solução de Z ′(t) = A · Z(t) com Z(0) = 0.Conseguem preencher os detalhes que faltam?
(3.10) Exercício. Diagonalizem as seguintes matrizes e determinem as suas exponenciais.
(a)
11 3−6 2
; (b)
−1 −124 13
; (c)
−9 10−8 9
; (d)
−9 4−5 0
.
(Notem que, para ser mais fácil inverter a matriz dos vetores próprios, pode ser boa ideiaescolhê-los de modo a que a matriz tenha determinante 1.)
(3.11) Exercício. Resolvam os seguintes sistemas de equações diferenciais com t como va-riável independente:
(a) x ′1 = 11x1+ 3x2, x ′2 =−6x1+ 2x2, x1(0) = 0, x2(0) = 0;
(b) x ′1 =−x1− 12x2+ 3t, x ′2 = 4x1+ 13x2− 2t, x1(0) = 0, x2(0) = 0;
(c) x ′1 =−9x1+ 10x2, x ′2 =−8x1+ 9x2, x1(0) = 0, x2(0) = 1;
(d) x ′1 =−9x1+ 4x2+ t, x ′2 =−5x1+ t, x1(0) = 5, x2(0) = 6.
(3.12) Vejamos mais um exemplo. Se
A=
4 0 00 −3 00 0 11
,
então e1, e2, e e3 (os vetores da base canónica) são vetores próprios de A, pois A · e1 = 4e1,A · e2 =−3e2, e A · e3 = 11e3. Por isso,
eAt · e1 = e4t e1, eAt · e2 = e−3t e2, e eAt · e3 = e11t e3
e concluímos que
eAt =
e4t 0 00 e−3t 00 0 e11t
.
35/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(3.13) EXPONENCIAL DE BLOCO DE JORDAN. Suponham agora que temos
y′ = A · y, onde A=
0 10 0
.
Para esta matriz A, temos apenas um vetor próprio independente: v1 = 1
0
. Peloraciocínio que fizemos há pouco, sabemos que y1(t) = e0tv1 = v1 é uma solução da equação.Como a solução também é dada pela exponencial, obtemos
eAt · v1 = v1.
Temos A · v2 = 0v2+ v1. Queremos calcular y2(t) = eAt · v2. Mas
y′2(t) =
eAt · v2′ = eAt · A · v2
︸︷︷︸
v1
= eAt · v1 = v1.
Integrando ambos os lados da equação entre 0 e t, obtemos
y2(t) = y2(0) + tv1, ou seja, eAt · v2 = v2+ tv1.
Se construirmos uma matriz com colunas y1(t),y2(t),
Y (t) =
y1(t) y2(t)
=
1 t0 1
,
temos, mais uma vez, Y (0) = Id. Portanto, eAt = Y (t) · Y (0)−1 = Y (t).É razoável perguntar o que acontece quando o valor próprio não é 0. Por exemplo,
consideremos
B =
7 10 7
.
Mas nesse caso A= B− 7 Id tem valor próprio 0, por isso
eBt · e−7t = eBt · e−7 Id t = e(B−7 Id) t = eAt =
1 t0 1
, logo eBt = e7t ·
1 t0 1
.
Consideremos agora o bloco de Jordan n× n com valor próprio λ= 0
N =
0 1 0 0 00 0 1 0 00 0 0 1 00 0 0 0 10 0 0 0 0
.
Se chamarmos e1, . . .e5 aos vetores da base canónica, podemos ver que N ·ek = ek−1 quandok > 1 e N · e1 = 0. Como é que isso ajuda?
Escrevendo yk(t) = eN t · ek, já vimos que y1(t) = e1 e y2(t) = e2+ te1. Temos ainda
y′k(t) =
eN t · ek′ = eN t · N · ek = eN t · (0ek + ek−1) = eN t · ek−1 = yk−1(t).
Assim, temosy′3(t) = y2(t) = e2+ te1.
36/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 3: EDOS EM Rn E EXPONENCIAIS DE MATRIZES
Primitivando e usando y3(0) = e3, chegamos a
y3(t) = e3+ te2+t2
2e1.
Com o mesmo género de raciocínio, obtemos ainda
y4(t) = e4+ te3+t2
2e2+
t3
3!e1;
y5(t) = e5+ te4+t2
2e3+
t3
3!e2+
t4
4!e1.
Construímos agora uma matriz a partir dos yk(t):
Y (t) =
y1(t) y2(t) y3(t) y4(t) y5(t)
=
1 t t2
2!t3
3!t4
4!
0 1 t t2
2!t3
3!
0 0 1 t t2
2!0 0 0 1 t0 0 0 0 1
.
Como Y (0) = Id, concluímos que eN t = Y (t) · Y (0)−1 = Y (t).Se quisermos considerar o caso geral de
J =
λ 1 0 0 00 λ 1 0 00 0 λ 1 00 0 0 λ 10 0 0 0 λ
,
podemos observar que J −λ Id= N . Portanto,
eJ t = e(λ Id+N) t = eλ Id t · eN t = eλt ·
1 t t2
2!t3
3!t4
4!
0 1 t t2
2!t3
3!
0 0 1 t t2
2!0 0 0 1 t0 0 0 0 1
.
Por exemplo, se
J =
7 1 0 0 00 7 1 0 00 0 7 1 00 0 0 7 10 0 0 0 7
,
então a sua exponencial é
eJ t = e7t
1 t t2
2t3
3!t4
4!
0 1 t t2
2t3
3!
0 0 1 t t2
20 0 0 1 t0 0 0 0 1
.
37/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(3.14) Outro caso relevante é o das matrizes que se podem decompor como
C =
A 00 B
(onde A e B são matrizes quadradas e cada 0 é uma matriz nula com as dimensões necessá-rias para que C seja outra matriz quadrada). Vamos mostrar que
eC t =
eAt 00 eBt
.
Lembram-se da definição da exponencial de matrizes? Dissemos que eC t é a (única) soluçãode M ′(t) = C · M(t) com M(0) = Id. Para provar que eC t é realmente dada pela fórmulaacima, basta verificar essas duas condições:
eAt 00 eBt
′=
(eAt)′ 00 (eBt)′
=
A · eAt 00 B · eBt
=
A 00 B
·
eAt 00 eBt
;
eA0 00 eB0
=
Id 00 Id
= Id .
(Conseguem verificar que isto chega?)
(3.15) Exercício. Determinem as exponenciais das seguintes matrizes.
(a)
3 10 3
; (b)
5 0 00 4 10 0 4
; (c)
−1 0 00 −1 10 0 −1
.
(3.16) Exercício. Resolvam os seguintes sistemas de equações diferenciais com t como va-riável independente:
(a) x ′1 = 3x1+ x2, x ′2 = 3x2+ 1, x1(0) = 0, x2(0) = 0;
(b) x ′1 = 5x1, x ′2 = 4x2+ x3, x ′2 = 4x3, x1(0) = 1, x2(0) = 0, x3(0) = 1;
(c) x ′1 =−x1+ t, x ′2 =−x2+ x3, x ′3 =−x3, x1(0) = 0, x2(0) = 1 x3(0) = 2.
(3.17) Resta a pergunta: e como fazemos quando a matriz não é diagonal nem um blocode Jordan? Podemos ter a sorte de encontrar soluções suficientes para usar a matriz wrons-kiana: eAt = Y (t) · Y (0)−1. Ou podemos tentar encontrar a forma de Jordan, e aproveitaro que já sabemos sobre exponenciais de matrizes diagonais e de blocos de Jordan. Feliz-mente, na prática a questão é bastante menos técnica do que esta longa discussão poderiafazer suspeitar. Em todo o caso, vamos dedicar algum tempo a uns quantos exemplos.
(3.18) A FORMA DE JORDAN DE UMA MATRIZ. Antes de mais, o que é uma forma de Jordan deuma matriz? É o que usamos quando gostávamos de ter uma diagonalização, mas não hávetores próprios suficientes. Uma matriz de Jordan é uma matriz com blocos de Jordan ao
38/99
Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
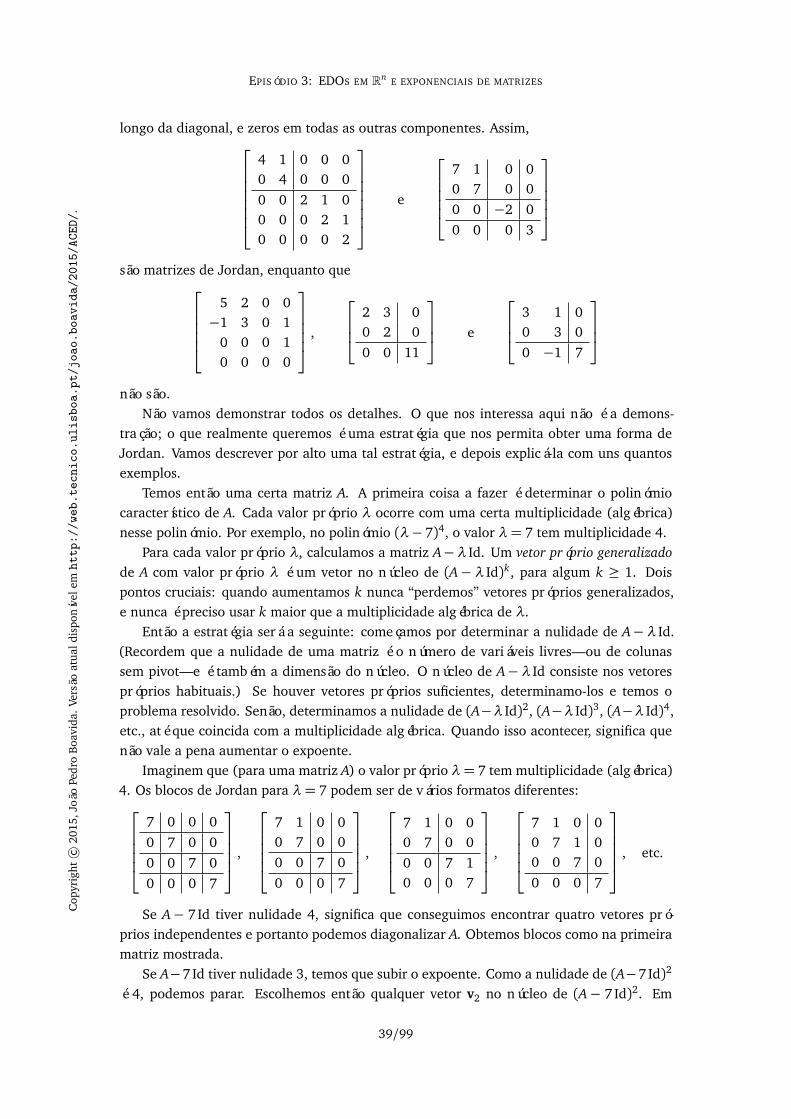
EPISÓDIO 3: EDOS EM Rn E EXPONENCIAIS DE MATRIZES
longo da diagonal, e zeros em todas as outras componentes. Assim,
4 1 0 0 00 4 0 0 00 0 2 1 00 0 0 2 10 0 0 0 2
e
7 1 0 00 7 0 00 0 −2 00 0 0 3
são matrizes de Jordan, enquanto que
5 2 0 0−1 3 0 1
0 0 0 10 0 0 0
,
2 3 00 2 00 0 11
e
3 1 00 3 00 −1 7
não são.Não vamos demonstrar todos os detalhes. O que nos interessa aqui não é a demons-
tração; o que realmente queremos é uma estratégia que nos permita obter uma forma deJordan. Vamos descrever por alto uma tal estratégia, e depois explicá-la com uns quantosexemplos.
Temos então uma certa matriz A. A primeira coisa a fazer é determinar o polinómiocaracterístico de A. Cada valor próprio λ ocorre com uma certa multiplicidade (algébrica)nesse polinómio. Por exemplo, no polinómio (λ− 7)4, o valor λ= 7 tem multiplicidade 4.
Para cada valor próprio λ, calculamos a matriz A− λ Id. Um vetor próprio generalizadode A com valor próprio λ é um vetor no núcleo de (A− λ Id)k, para algum k ≥ 1. Doispontos cruciais: quando aumentamos k nunca “perdemos” vetores próprios generalizados,e nunca é preciso usar k maior que a multiplicidade algébrica de λ.
Então a estratégia será a seguinte: começamos por determinar a nulidade de A− λ Id.(Recordem que a nulidade de uma matriz é o número de variáveis livres—ou de colunassem pivot—e é também a dimensão do núcleo. O núcleo de A− λ Id consiste nos vetorespróprios habituais.) Se houver vetores próprios suficientes, determinamo-los e temos oproblema resolvido. Senão, determinamos a nulidade de (A−λ Id)2, (A−λ Id)3, (A−λ Id)4,etc., até que coincida com a multiplicidade algébrica. Quando isso acontecer, significa quenão vale a pena aumentar o expoente.
Imaginem que (para uma matriz A) o valor próprio λ= 7 tem multiplicidade (algébrica)4. Os blocos de Jordan para λ= 7 podem ser de vários formatos diferentes:
7 0 0 00 7 0 00 0 7 00 0 0 7
,
7 1 0 00 7 0 00 0 7 00 0 0 7
,
7 1 0 00 7 0 00 0 7 10 0 0 7
,
7 1 0 00 7 1 00 0 7 00 0 0 7
, etc.
Se A− 7 Id tiver nulidade 4, significa que conseguimos encontrar quatro vetores pró-prios independentes e portanto podemos diagonalizar A. Obtemos blocos como na primeiramatriz mostrada.
Se A−7 Id tiver nulidade 3, temos que subir o expoente. Como a nulidade de (A−7 Id)2
é 4, podemos parar. Escolhemos então qualquer vetor v2 no núcleo de (A− 7 Id)2. Em
39/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
seguida, escolhemos v1 = (A− 7 Id) · v2. (Tipicamente, v1 6= 0; se não for, temos de voltaratrás e escolher outro v2.) A consequência dessa escolha é que (A− 7 Id) · v2 = v1, ouA · v2 = 7v2 + v1. Mas recordem que a nulidade de A− 7 Id era 3. Este v1 é um vetor donúcleo de A− 7 Id; podemos encontrar mais dois: serão o v3 e o v4. Ora, escrevendo istoem termos de matrizes, ficamos com algo como
A ·
v1 v2 v3 v4
=
A · v1 A · v2 A · v3 A · v4
=
7v1 7v2+ v1 7v3 7v4
=
v1 v2 v3 v4
·
7 1 0 00 7 0 00 0 7 00 0 0 7
,
que corresponde à segunda matriz mostrada acima.Como imaginam, tentar descrever os outros casos em termos genéricos fica rapidamente
monótono ou confuso. É melhor passarmos a alguns exemplos concretos.
(3.19) PRIMEIRO EXEMPLO. Começamos com um caso relativamente simples, o da matriz
A=
1 6 00 −5 0
−12 −12 −5
.
O polinómio característico de A é (λ− 1) (λ+ 5)2.Os vetores próprios com λ= 1 são obtidos resolvendo o sistema (A− Id) · v= 0:
0 6 0 00 −6 0 0
−12 −12 −6 0
, cujas soluções são os múltiplos de v1 =
10−2
.
Para λ = −5, podemos verificar que A+ 5 Id tem nulidade 2. Como coincide com amultiplicidade algébrica, podemos calcular imediatamente os vetores próprios, resolvendo(A+ 5 Id) · v= 0:
6 6 0 00 0 0 0
−12 −12 0 0
L1/6
L3+ 2L1
1 1 0 00 0 0 00 0 0 0
.
As soluções deste sistema são dadas por
x1+ x2 = 0 ⇒
x1
x2
x3
= x2
−110
︸ ︷︷ ︸
v2
+x3
001
︸ ︷︷ ︸
v3
= x2v2+ x3v3.
Ou seja, encontrámos dois vetores próprios independentes com λ=−5.
40/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 3: EDOS EM Rn E EXPONENCIAIS DE MATRIZES
Dissemos antes que se v é um vetor próprio de A com valor próprio λ, então y(t) = eλtvé uma solução de y′(t) = A · y(t). Como encontrámos três vetores próprios independentes(v1, v2, e v3), encontrámos também três soluções:
y1(t) = et v1 = et
10−2
, y2(t) = e−5t v2 = e−5t
−110
,
e y3(t) = e−5t v3 = e−5t
001
.
Construímos uma matriz Y (t) com estas três soluções como colunas:
Y (t) =
y1(t) y2(t) y3(t)
=
et −e−5t 00 e−5t 0−2et 0 e−5t
.
Observando que a matriz Y (0) =
v1 v2 v3
é invertível (pois já vimos que os três ve-tores são, de facto, uma base) e recordando o que dissemos sobre a exponencial de matrizes,concluímos que eAt = Y (t) · Y (0)−1. Ou seja, obtemos
eAt =
et −e−5t 00 e−5t 0−2et 0 e−5t
·
1 −1 00 1 0−2 0 1
−1
.
Há outra forma de prosseguir após a determinação dos vetores próprios. Consiste emobservar que, se construirmos uma matriz S =
v1 v2 v3
com os três vetores próprioscomo colunas, então
A · S = A ·
v1 v2 v3
=
A · v1 A · v2 A · v3
=
v1 −5v2 −5v3
=
v1 v2 v3
·
1 0 00 −5 00 0 −5
︸ ︷︷ ︸
D
= S · D.
(Este é o raciocínio que está por trás da definição tradicional de diagonalização de matrizes.)Como A · S = S · D, temos eAt · S = S · eDt . Mas como D é uma matriz diagonal, já sabemosque
eDt =
et 0 00 e−5t 00 0 e−5t
.
Portanto, eAt = S · eDt · S−1, ou
eAt =
1 −1 00 1 0−2 0 1
·
et 0 00 e−5t 00 0 e−5t
·
1 −1 00 1 0−2 0 1
−1
.
Se fizerem o primeiro produto de matrizes, podem ver que obtemos a mesma expressão quetínhamos antes. (E portanto, podem escolher qual dos dois métodos preferem usar.)
41/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(3.20) SEGUNDO EXEMPLO. Quando a matriz é diagonalizável, a situação é sempre seme-lhante ao que fizemos com a matriz A. Mas o que se passa se a matriz não for diagonalizável?Consideremos a matriz
B =
−8 1−4 −12
,
cujo polinómio característico é (λ+10)2. Temos portanto um único valor próprio, λ=−10,com multiplicidade algébrica 2. Como a matriz
B−λ Id= B+ 10 Id=
2 1−4 −2
tem nulidade 1 (lembram-se como calcular a nulidade?), temos de considerar (B+ 10 Id)2,cuja nulidade é 2 (pois trata-se da matriz nula).
Escolhemos então qualquer v2 no núcleo de (B+ 10 Id)2. Por exemplo, v2 = 0
1
(paraquê complicar?). Em seguida definimos v1 = (B+ 10 Id) · v2 =
1−2
.Essas escolhas garantem que (B + 10 Id) · v1 = (B + 10 Id)2 · v2 = 0. Por conseguinte,
B · v1 = −10v1 e B · v2 = −10v2 + v1 (verifiquem!). Usando esses dois vetores, obtemosduas soluções de y′(t) = B · y(t):
y1(t) = e−10t v1 = e−10t
1−2
e y2(t) = e−10t (v2+ tv1) = e−10t
t1− 2t
.
Se construirmos a matriz Y (t) =
y1(t) y2(t)
, obtemos
eBt = Y (t) · Y (0)−1 = e−10t
1 t−2 1− 2t
·
1 0−2 1
−1
.
Alternativamente, depois de termos escolhido v1 e v2, podemos obter a forma de Jordanpara B. Pondo S =
v1 v2
, temos
B · S = B ·
v1 v2
=
B · v1 B · v2
=
−10v1 −10v2+ v1
=
v1 v2
·
−10 10 −10
︸ ︷︷ ︸
J
= S · J .
A exponencial de J é conhecida, por isso podemos dizer
eBt = S · eJ t · S−1 =
1 0−2 1
· e−10t
1 t0 1
·
1 0−2 1
−1
.
Se fizerem as contas, podem confirmar que chegamos de facto ao mesmo resultado que noparágrafo anterior.
(3.21) TERCEIRO EXEMPLO. Experimentemos agora com a matriz
C =
−8 1 30 −2 0
−12 2 4
,
42/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 3: EDOS EM Rn E EXPONENCIAIS DE MATRIZES
cujo polinómio característico (verifiquem) é (λ+ 2)3. Temos portanto um único valor pró-prio, λ=−2, com multiplicidade (algébrica) 3.
Como a nulidade de
C + 2 Id=
−6 1 30 0 0
−12 2 6
é 2 (que é menor que a multiplicidade algébrica, 3), temos de considerar (C + 2 Id)2 quetem nulidade 3 (pois é a matriz nula).
Queremos escolher um v2 no núcleo de (C + 2 Id)2 mas fora do núcleo de C + 2 Id—decontrário v1 = (C +2 Id) · v2 seria 0, e teríamos de voltar atrás para escolher outro v2. Umadas (imensas) escolhas possíveis é
v2 =
010
e v1 = (C + 2 Id) · v2 =
102
.
Com isto, encontrámos um dos dois vetores próprios independentes (são dois, porque anulidade de C + 2 Id era 2). Precisamos de encontrar o outro (que será o v3). Para tal,precisamos das soluções de (C + 2 Id) · v= 0. Através do método de Gauss,
−6 1 3 00 0 0 0
−12 2 6 0
L3− 2L1
−6 1 3 00 0 0 00 0 0 0
,
vemos que as soluções correspondem a −6x1+ x2+ 3x3 = 0. Entre as soluções, temos queescolher uma independente de v1 e v2. Pode ser, por exemplo,
v3 =
0−3
1
.
O resultado de tudo isto é que encontrámos três vetores linearmente independentes.Como (C + 2 Id) · v1 = 0, temos C · v1 = −2v1. Como (C + 2 Id) · v2 = v1, temos C · v2 =−2v2+ v1. Como (C + 2 Id) · v3 = 0, temos C · v3 =−2v3.
A estes três vetores podemos associar soluções de y′(t) = C · y(t):
y1(t) = e−2t v1 = e−2t
102
, y2(t) = e−2t (v2+ tv1) = e−2t
t12t
,
e y3(t) = e−2t v3 = e−2t
0−3
1
.
Como no exemplo anterior, construímos Y (t) =
y1(t) y2(t) y3(t)
e obtemos
eC t = Y (t) · Y (0)−1 =
e−2t te−2t 00 e−2t −3e−2t
2e−2t 2te−2t e−2t
·
1 0 00 1 −32 0 1
−1
.
43/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
Alternativamente, podemos construir explicitamente uma forma de Jordan para a matrizC . Com efeito, pondo S =
v1 v2 v3
, temos
C · S = C ·
v1 v2 v3
=
C · v1 C · v2 C · v3
=
−2v1 −2v2+ v1 −2v3
=
v1 v2 v3
·
−2 1 00 −2 00 0 −2
︸ ︷︷ ︸
J
= S · J .
Ora, como a matriz J é formada por dois blocos de Jordan, temos
eJ t =
eh−2 1
0 −2
i
t 00
0 0 e[−2 ]t
=
e−2t
1 t0 1
00
0 0 e−2t
=
e−2t te−2t 00 e−2t 00 0 e−2t
.
Temos então eC t = S ·eJ t ·S−1. Se fizerem o primeiro produto, podem ver que esta expressãopara eC t realmente coincide com a que obtivemos acima.
(3.22) QUARTO EXEMPLO. Mais um exemplo, agora com a matriz
F =
1 0 03 −3 1
−12 0 −3
.
O seu polinómio característico é (λ− 1) (λ+ 3)2.Os vetores próprios com λ= 1 são os vetores no núcleo de F− Id. Resolvendo o sistema
0 0 0 03 −4 1 0
−12 0 −4 0
, obtemos os múltiplos de v1 =
10−3
.
Como a nulidade de
F + 3 Id=
4 0 03 0 1
−12 0 0
é 1 (menor que a multiplicidade algébrica 2), temos que considerar
(F + 3 Id)2 =
16 0 00 0 0
−48 0 0
.
Esta matriz tem nulidade 2. Vamos então escolher qualquer v3 no seu núcleo, exigindoapenas que v2 = (F + 3 Id) · v3 seja não-nulo. Por exemplo, tomemos
v3 =
001
e v2 = (F + 3 Id) · v3 =
010
.
44/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 3: EDOS EM Rn E EXPONENCIAIS DE MATRIZES
(Se, por coincidência, obtivéssemos v2 = 0, teríamos que voltar atrás para escolher outrov3.)
Encontrámos assim três vetores linearmente independentes. Como (F − Id) · v1 = 0,temos F · v1 = v1. Como (F +3 Id) · v2 = 0, temos F · v2 =−3v2. E como (F +3 Id) · v3 = v2,temos F · v3 =−3v3+ v2.
A estes três vetores podemos associar soluções de y′(t) = F · y(t):
y1(t) = et v1 = et
10−3
, y2(t) = e−3t v2 = e−3t
010
,
e y3(t) = e−3t (v3+ tv2) = e−3t
0t1
.
Como nos outros exemplos, construímos Y (t) =
y1(t) y2(t) y3(t)
e obtemos
eF t = Y (t) · Y (0)−1 =
et 0 00 e−3t te−3t
−3et 0 e−3t
·
1 0 00 1 0−3 0 1
−1
.
Alternativamente, podemos construir explicitamente uma forma de Jordan para a matrizF . Pondo S =
v1 v2 v3
, temos
F · S = F ·
v1 v2 v3
=
F · v1 F · v2 F · v3
=
v1 −3v2 −3v3+ v2
=
v1 v2 v3
·
1 0 00 −3 10 0 −3
︸ ︷︷ ︸
J
= S · J .
Como a matriz J é formada por dois blocos de Jordan, temos
eJ t =
e[1 ]t 0 000
eh−3 1
0 −3
i
t
=
et 0 0
0
0e−3t
1 t0 1
=
et 0 00 e−3t te−3t
0 0 e−3t
.
Temos também eF t = S · eJ t · S−1.
(3.23) QUINTO EXEMPLO. Para um último exemplo, consideramos a matriz
G =
3 0 03 0 1
10 −9 6
,
cujo polinómio característico (verifiquem) é (λ − 3)3. Vemos que G tem um único valorpróprio, λ= 3, com multiplicidade (algébrica) 3.
45/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
Como a nulidade de
G− 3 Id=
0 0 03 −3 1
10 −9 3
é 1 (confirmam?), teremos de considerar (G − 3 Id)2. Mas esta matriz tem nulidade 2(concordam?), que é ainda inferior à multiplicidade algébrica. Por isso, teremos que ir até(G− 3 Id)3, que é a matriz nula.
Assim, escolhemos um qualquer v3 e definimos v2 = (G− 3 Id) · v3 e v1 = (G− 3 Id) · v2,exigindo apenas que resulte v1 6= 0. Por exemplo, tomemos
v3 =
001
, v2 = (G− 3 Id) ·
001
=
013
, e v1 = (G− 3 Id) ·
013
=
000
.
Azar—chegámos a v1 = 0. Tentemos de novo:
v3 =
100
, v2 = (G−3 Id)·
100
=
03
10
, e v1 = (G−3 Id)·
03
10
=
013
.
Encontrámos três vetores linearmente independentes. Como (G − 3 Id) · v1 = 0, temosG · v1 = 3v1. Como (G− 3 Id) · v2 = v1, temos G · v2 = 3v2+ v1. E como (G− 3 Id) · v3 = v2,temos G · v3 = 3v3+ v2.
A esses vetores podemos associar estas soluções de y′(t) = G · y(t):
y1(t) = e3t v1 = e3t
013
, y2(t) = e3t (v2+ tv1) = e3t
03+ t
10+ 3t
,
e y3(t) = e3t v3+ tv2+t2
2v1
= e3t
1
3t + t2
2
10t + 3 t2
2
.
Como nos exemplos anteriores, construímos uma matriz Y (t) a partir destas três soluções,
Y (t) =
0 0 e3t
e3t (3+ t) e3t
3t + t2
2
e3t
3e3t (10+ 3t) e3t
10t + 3 t2
2
e3t
,
e concluímos que eGt = Y (t) · Y (0)−1.Ou então construímos a matriz S =
v1 v2 v3
e calculamos
G · S = G ·
v1 v2 v3
=
G · v1 G · v2 G · v3
=
3v1 3v2+ v1 3v3+ v2
=
v1 v2 v3
·
3 1 00 3 10 0 3
︸ ︷︷ ︸
J
= S · J .
46/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 3: EDOS EM Rn E EXPONENCIAIS DE MATRIZES
Então, como eGt = S · eJ t · S−1 e J é um bloco de Jordan, teremos
eGt = S · e3t
1 t t2
20 1 t0 0 1
· S−1.
(3.24) Exercício. Determinem as formas de Jordan e as exponenciais das seguintes matrizes:
(a)
−9 9−4 3
; (b)
8 1−9 2
; (c)
1 −2 −2−3 5 5
4 −7 −7
;
(d)
−1 −1 2−4 0 −5−4 2 −7
; (e)
0 2 −34 −2 −24 −4 0
; (f)
−1 1 −2−3 −1 6−1 −1 4
;
(g)
1 2 2−3 6 3
1 −1 2
; (h)
−2 7 −1−3 7 −1−1 1 1
.
Os valores próprios da matriz (c) são 0 e −1. Os valores próprios da matriz (d) são −2 e −3.Os valores próprios da matriz (e) são ±2. As matrizes (g) e (h) só têm um valor próprio.
(3.25) Exercício. Resolvam os seguintes sistemas de equações diferenciais com t como va-riável independente:
(a) x ′1 =−9x1+ 9x2, x ′2 =−4x1+ 3x2, x1(0) = 7, x2(0) = 5;(b) x ′1 = 8x1+ x2+ 1, x ′2 =−9x1+ 2x2− 3, x1(0) =−3, x2(0) = 10;(c) x ′1 =−2x1+ 7x2− x3− 2, x ′2 =−3x1+ 7x2− x3− 1, x ′3 =−x1+ x2+ x3+ 1,
x1(0) = 1, x2(0) = 0, x3(0) =−1;(d) x ′1 =−2x1+ 7x2− x3+ 1, x ′2 =−3x1+ 7x2− x3, x ′3 =−x1+ x2+ x3− 1,
x1(0) =−2, x2(0) =−1, x3(0) = 1;(e) x ′1 =−2x1+ 7x2− x3+ 1, x ′2 =−3x1+ 7x2− x3, x ′3 =−x1+ x2+ x3− 1,
x1(2) =−2, x2(2) =−1, x3(2) = 1.
(3.26) COEFICIENTES NÃO CONSTANTES. É razoável perguntar o que se passa quando os coe-ficientes da equação não são constantes, como em
Y ′(t) = A(t) Y (t) + B(t), Y (t0) = Y0.
Vamos admitir que exista algum análogo W (t) da exponencial de matrizes, satisfazendoW ′(t) = A(t)W (t). A solução seria da forma Y (t) =W (t) Z(t)? Se sim, teríamos
Y ′(t) =W ′(t) Z(t) +W (t) Z ′(t) = A(t)W (t) Z(t) +W (t) Z ′(t) = A(t) Y (t) +W (t) Z ′(t).
Por outro lado, Y ′(t) = A(t) Y (t) + B(t), o que nos leva a concluir que B(t) = W (t) Z ′(t).Assim, desde que W (t) seja invertível, temos Z ′(t) =W (t)−1 B(t) e conseguimos obter Z(t)
47/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
por primitivação, usando ainda Z(t0) =W (t0)−1 Y (t0) (de onde vem isso?):
Y (t) =W (t)
W (t0)−1 Y0+
∫ t
t0
W (r)−1 B(r)dr
.
(De acordo?) É uma simples variante da fórmula da variação das constantes, desta vez coma W (t) em vez da exponencial.
Para construir W (t) precisamos de várias soluções (uma para cada coluna) de w′(t) =A(t)w(t), e precisamos que sejam linearmente independentes em t0 (para assegurar queW (t) é invertível numa vizinhança de t0). Ou seja, construímos W (t) a partir de soluçõesdo problema homogéneo associado à mesma matriz A(t).
Vejamos um exemplo. Considerem o sistema(
(1− t2) y ′1 =−t y1+ y2+ t (1− t2), y1(0) = 0,
(1− t2) y ′2 = y1− t y2+ (1− t2), y2(0) = 1.
O sistema homogéneo associado é(
(1− t2)w′1 =−tw1+w2,
(1− t2)w′2 = w1− tw2,
e podemos verificar que
1t
e t
1
são duas soluções linearmente independentes (desdeque 1− t2 6= 0). Definimos então W (t) =
1 tt 1
.O sistema original pode ser reescrito (se aceitarmos uma divisão por 1− t2) na forma
y′(t) =
−t 11 −t
1
1− t2 y(t) +
t1
.
(3.27) Exercício. Qual a solução y(t)? Qual o maior intervalo em que é solução da equaçãooriginal? Qual o intervalo em que W (t) é invertível?
(3.28) Exercício. Considerem a equação
y′(t) =
0 02t 0
y(t) +
3t0
, y(0) =
1−1
.
Sabendo que (1, t2− 1) e (1, t2+ 1) são soluções do sistema homogéneo, determinem y(t).
(3.29) Exercício. Considerem o sistema(
z′1(t) = tz1(t)− z2(t) + 1,
z′2(t) = (1+ t2) z1(t)− tz2(t) + t,z1(0) = z2(0) = 0.
Sabendo que (t, t2− 1) e (1, t) são soluções do sistema homogéneo, determinem z(t).
(3.30) Exercício. Considerem o sistema(
w′1(t) = 2w1(t)− et w2(t),
w′2(t) = 2e−t w1(t)− 2w2(t) + 1,w1(0) = w2(0) = 1.
Sabendo que (et , 1) e (1,2e−t) são soluções do sistema homogéneo, determinem w(t).
48/99
Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 3: EDOS EM Rn E EXPONENCIAIS DE MATRIZES
(3.31) Exercício?. Vamos considerar a equação geral y′(t) = A(t) y(t) + b(t) definida ema < t < b, onde cada A(t) é uma matriz n × n com componentes ai j(t). Vamos usar oteorema de Picard–Lindelöf, com a função F : t,x 7→ A(t) x+ b(t).
(a) Mostrem que F(t,y1)− F(t,y2) = A(t) (y1− y2).(b) Suponham que cada função ai j é limitada em a < t < b. Mostrem que existe C > 0
tal que, para a < t < b e y1,y2 ∈ Rn, temos ‖F(t,y1)− F(t,y2)‖ ≤ C ‖y1− y2‖.(c) Se existir C como na alínea anterior, mostrem que existe uma única solução y satis-
fazendo a condição inicial y(t0) = y0, onde a < t0 < b.(d) Mantendo as hipóteses das alíneas anteriores, mostrem que podemos escolher n
condições iniciais linearmente independentes.
(3.32) Exercício. Seja agora a equação homogénea w′(t) = A(t)w(t) em a < t < b, ondecada A(t) é uma matriz n× n, cujas componentes são limitadas em a < t < b (como noexercício anterior). Consideramos ainda n soluções w1, . . . ,wn dessa equação, bem como amatriz W (t) com colunas w1(t), . . . ,wn(t).
(a) Fixado um vetor v ∈ Rn, mostrem que t 7→W (t)v é solução da equação homogénea.(b) Se W (t) v = 0 para algum a < t < b, mostrem que W (t) v = 0 para qualquer outro
a < t < b.(c) Se w1(t), . . . ,wn(t) é linearmente independente para algum a < t < b, mostrem
que o é para qualquer outro a < t < b.(d) Mostrem como construir, a partir de n vetores linearmente independentes, soluções
w1, . . . ,wn de modo que a matriz W (t) correspondente seja invertível para todo o a < t < b.
49/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(3.33) RESPOSTAS DE EXERCÍCIOS.
(3.5) 13
100+ t
10− 13
100e−10t + 3t
5e−10t ,
750− t
5+ 43
50e−10t − 6t
5e−10t.
(3.8)− 1
49− t
7+ 1
49e7t , 1
6− 1
6e6t.
(3.10) (a)h
2e8t−e5t e8t−e5t
−2e8t+2e5t −e8t+2e5t
i
.
(b)h
−3e7t+4e5t −6e7t+6e5t
2e7t−2e5t 4e7t−3e5t
i
.
(c)h
−4et+5e−t 5et−5e−t
−4et+4e−t 5et−4e−t
i
.
(d)h
−4e−4t+5e−5t 4e−4t−4e−5t
−5e−4t+5e−5t 5e−4t−4e−5t
i
.
(3.11) (a) (0,0).(b)− 3
49− 3
7t + 3
49e7t , 2
49+ 2
7t − 2
49e7t.
(c) segunda coluna da exponencial.(d) t
5− 1
25+ 4
e4t +26
25e5t , t5− 1
25+ 5
e4t +26
25e5t
.
(3.15) (a)
1 t0 1
e3t .
(b)
e5t 0 00 e4t te4t
0 0 e4t
. (c)
1 0 00 1 t0 0 1
e−t .
(3.16) (a) 1
9− 1
9e3t + 1
3te3t ,− 1
3+ 1
3e3t.
(b) (e5t , te4t , e4t).(c) (t − 1+ e−t , e−t + 2te−t , 2e−t).
(3.24) (a)−3 1
0 −3
; 1−6t 9t−4t 1+6t
e−3t .
(b)
5 10 5
; 1+3t t−9t 1−3t
e5t .
(c)−1 0 0
0 0 10 0 0
;
2−e−t 2e−t−2 2e−t−22e−t−2−t 5+t−4e−t 4+t−4e−t
3+t−3e−t 6e−t−6−t 6e−t−5−t
.
(d)−2 0 0
0 −3 10 0 −3
;
(1+2t) e−3t e−3t−e−2t (t−1) e−3t+e−2t
−4te−3t 3e−2t−2e−3t (3−2t) e−3t−3e−2t
−4te−3t 2e−2t−2e−3t (3−2t) e−3t−2e−2t
.
(e)
2 0 00 −2 10 0 −2
;
(1+2t) e−2t e2t−(1+2t) e−2t (1+t) e−2t−e2t
4te−2t e2t−4te−2t (1+2t) e−2t−e2t
4te−2t −4te−2t (1+2t) e−2t
.
(f)
2 0 00 0 10 0 0
;
1−t t −2t−3t 3+3t−2e2t 6e2t−6−6t−t 1+t−e2t 3e2t−2−2t
.
(g)
3 1 00 3 00 0 3
;
1−2t 2t 2t−3t 1+3t 3t
t −t 1−t
e3t .
(h)
2 1 00 2 10 0 2
;
1−4t−2t2 7t+3t2 −t−t2
−3t−t2 1+5t+ 32
t2 −t− 12
t2
t2−t t− 32
t2 1−t+ 12
t2
e2t .
(3.25) (a) (7+ 3t, 5+ 2t)e−3t .(b)
te5t − 145
e5t − 15, 47
5e5t − 3te5t + 3
5
.
(c)
1− 3te2t − t2e2t , 12− 1
2e2t − 2te2t −
12
t2e2t ,− 12− 1
2e2t + 1
2t2e2t.
(d)−1− e2t − te2t − 1
2t2e2t ,− 3
8− 5
8e2t −
34
te2t − 14
t2e2t , 38+ 5
8e2t − 1
4te2t + 1
4t2e2t.
(e) igual, mas com t substituído por t − 2.
(3.27) y(t) = (t + t2, 1+ t). R. ]−1,1[.
(3.28) y(t) =
1+ 32
t2,−1+ t2 + 34
t4.
(3.29) z(t) = (t, t2).
(3.30) w(t) = (−1+ 2et − tet , 3− t − 2e−t).
50/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 4
EQUAÇÕES DIFERENCIAIS DE ORDEM SUPERIOR
As equações diferenciais de ordem superior podem ser resolvidas com as técnicas que discu-timos no episódio 3. Por exemplo, f ′′ − 13 f ′ + 42 f = 0 (a variável independente continuaa ser t) pode ser simulada usando x1 = f e x2 = f ′. O sistema fica então
(
x ′1 = f ′ = x2,
x ′2 = f ′′ =−42 f + 13 f ′ =−42x1+ 13x2,ou
x1
x2
′=
0 1−42 13
︸ ︷︷ ︸
A
x1
x2
.
Esta é exatamente a equação discutida no início desse episódio. O polinómio característicoda matriz A é−λ(13−λ)+42, ou (λ−7) (λ−6). Quais os vetores próprios correspondentes?Digamos que Av1 = 7v1 e Av2 = 6v2. Assim,
A
v1 v2
︸ ︷︷ ︸
S
y(t) =
f (t)f ′(t)
=
M · v1 M · v2
=
7v1 6v2
= S
7 00 6
︸ ︷︷ ︸
D
,
e podemos concluir que
eAt = S · eDt · S−1 = S ·
e7t 00 e6t
· S−1 e x(t) = S ·
e7t 00 e6t
· S−1 · x(0).
Em particular, vemos que a primeira coordenada da solução (correspondente a x1 = f ) éuma combinação linear de e7t e e6t .
Isto encaixa num padrão mais geral: se usarmos D para indicar a derivação, podemosescrever f ′′−13 f ′+42 f = (D2−13D+42) f e fatorizar D2−13D+42= (D−7) (D−6). Poroutro lado, podemos ver que (D−7) aniquila e7t , ou seja, que (D−7) (e7t) = (e7t)′−7e7t =0. Da mesma forma, (D − 6) aniquila e6t . Vemos então que as funções aniquiladas porD2−13D+42 (entre as quais está a solução f da nossa equação) são uma combinação lineardas funções aniquiladas pelos seus fatores (que neste caso não têm raízes em comum). Ométodo dos aniquiladores sistematiza esta estratégia, e será o nosso primeiro assunto nesteepisódio.
(4.1) Exercício. Escrevam a equação matricial correspondente a uma equação como
f ′′′+ a f ′′+ b f ′+ c f = 0.
Qual o polinómio característico da matriz que encontram? (Calculem o determinanteusando a regra de Laplace em relação às primeiras colunas das matrizes.)
51/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(4.2) Vamos olhar para a equação f ′′+ f ′−2 f = g, com condições iniciais f (0) = f ′(0) = 3.Escrevendo-a na forma matricial, obtemos
ff ′
′
︸ ︷︷ ︸
y′
=
0 12 −1
︸ ︷︷ ︸
A
ff ′
︸ ︷︷ ︸
y
+
0g
︸ ︷︷ ︸
b
,
f (0)f ′(0)
︸ ︷︷ ︸
y(0)
=
33
.
Pela fórmula da variação das constantes, sabemos que
y(t) = eAt
y(0) +
∫ t
0
e−Ar b(r)dr
= eAt y(0)︸ ︷︷ ︸
solução da eq.homogénea
+ eAt
∫ t
0
e−Ar b(r)dr︸ ︷︷ ︸
solução particular
.
(4.3) Exercício. Calculem a exponencial da matriz, e usem-na para resolver a equação nocaso g(t) = 6et + 2.
(4.4) Só nos interessa a primeira linha. Vemos que, se não tivermos condições iniciais,temos de escolher um vetor constante em R2 (ou seja, a primeira linha envolve tantasconstantes quanto a ordem da equação) e que há sempre uma solução particular.
Porém, também vemos que, já que as soluções envolvem exponenciais (que podem serdeterminadas a partir dos valores próprios da matriz, ou mesmo diretamente a partir daequação—como?), seria desejável evitar a fórmula da variação das constantes.
(4.5) DERIVADAS E ANIQUILADORES. Começamos por identificar o núcleo de (D − λ). Dizer(D−λ) f = 0 é dizer f ′−λ f = 0. Esta equação não é exata, mas e−λt é um fator integrante.Assim, podemos escrever
f ′−λ f = 0 ⇔ e−λt f ′− e−λt λ f = 0 ⇔ (e−λt f )′ = 0.
Ou seja, e−λt f é uma constante C , ou f = Ceλt .Imaginem agora que temos qualquer função f (aniquilada ou não por (D − λ)) e que
queremos calcular g = (D−λ) f = f ′−λ f . Usando o mesmo fator integrante e−λt (no fimde contas, continuamos a ter uma equação linear), obtemos
e−λt g = e−λt f ′−λe−λt f = (e−λt f )′ ⇔ g = eλt (e−λt f )′.
Concluímos assim que (D−λ) f = eλt (e−λt f )′.
(4.6) Exercício. Mostrem que (D − λ)k f = eλt (e−λt f )(k) (para k inteiro positivo). Combase nesse resultado, mostrem que (D− λ)k f = 0 (i.e., f está no núcleo de (D− λ)k, i.e.,(D−λ)k aniquila f ) precisamente se e−λt f é um polinómio P(t) de grau menor que k, ouseja, se f (t) = P(t) eλt .
(4.7) E o que acontece se o nosso operador tiver valores próprios distintos? Em geral, pode-mos escrever a equação original na forma AB f = 0, onde A e B são operadores envolvendoapenas a derivada D (e portanto A e B comutam) e sem valores próprios em comum. Nesse
52/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 4: EQUAÇÕES DIFERENCIAIS DE ORDEM SUPERIOR
caso, todas as soluções de AB f = 0 são da forma f = a+ b, onde Aa = 0 e Bb = 0 (isto nãoé óbvio; conseguem demonstrar?).
A ideia ficará mais clara com um exemplo. Imaginem que queremos encontrar as solu-ções de (D+ 2) (D− 1)2 D f = 0. Como os fatores (D+ 2), (D− 1)2, e D não têm valorespróprios comuns (os valores são, respetivamente, −2, 1, e 0), sabemos que f é uma combi-nação linear de elementos nos núcleos de (D+ 2), (D− 1)2, e D. Ora, o núcleo de (D+ 2)consiste nos múltiplos de e−2t . O núcleo de (D−1)2 consiste em polinómios de grau menorque 2 multiplicados por et . E o núcleo de D consiste nas constantes. Assim, vemos que f éda forma
f = C1 e−2t︸ ︷︷ ︸
núcleo de (D+ 2)
+ C2 et + C3 t et︸ ︷︷ ︸
núcleo de (D− 1)2
+ C4︸︷︷︸
núcleo de D
.
(4.8) Podemos querer o contrário: dada uma função, encontrar um operador que a aniquile(ou seja, encontrar uma aniquilador). Para tal, começamos por juntar as parcelas associadasao mesmo valor próprio (ou seja, com a mesma exponencial), e determinar, para cada valorpróprio, qual o grau necessário.
Por exemplo, quem é um aniquilador para et− t5 e5t+3t2 et− t3 e4t+10e5t−4t et? Sejuntarmos as parcelas associadas a cada valor próprio, podemos ler diretamente:
(1+ 3t2− 4t) et︸ ︷︷ ︸
aniquilado por (D− 1)3
+ (−t5+ 10) e5t︸ ︷︷ ︸
aniquilado por (D− 5)6
+ (−t3) e4t︸ ︷︷ ︸
aniquilado por (D− 4)4
.
Assim, (D − 1)3 (D − 5)6 (D − 4)4 (ou qualquer outro operador com os mesmos fatores) éum aniquilador para essa função.
Um ponto importante é que só podemos aplicar este método depois de termos simpli-ficado cada parcela de modo a ter apenas uma exponencial e um polinómio. Por exemplo,se tivermos um produto de exponenciais, temos de simplificá-lo; se tivermos um produtode exponenciais e funções trigonométricas, temos de converter as funções trigonométricaspara exponenciais complexas e simplificar.
(4.9) Exercício. Determinem o aniquilador mais simples de cada uma das seguintes funções:
(a) e4t ; (b) 3e4t ; (c) e3t ; (d) e3t + 3e4t ;
(e) ei t ; (f) e−i t ; (g)ei t + e−i t
2; (h) cos t;
(i) te3t+2i t ; (j) te3t−2i t ; (k) te3t e2i t − e−2i t
2i; (l) te3t cos(2t);
(m) te3t − t2 e3t ; (n) te3t + t2 e3t sin(2t); (o) sin(2t) + t3 cos(2t); (p) (sin(2t))2.
(4.10) Vale a pena tomar nota deste padrão:
(D− a)2+ b2 = (D− a)2− (bi)2 = (D− a− bi) (D− a+ bi)
aniquila combinações lineares de e(a+bi) t e e(a−bi) t , que coincidem (porquê?) com as com-binações de eat cos(bt) e eat sin(bt).
53/99
JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
Da mesma forma, ((D − a)2 + b2)k = (D − a − bi)k (D − a + bi)k aniquila produtosde polinómios de grau menor que k por essas exponenciais, ou seja (porquê?), aniquilacombinações lineares de parcelas das formas t` eat cos(bt) e t` eat sin(bt) (onde ` < k).
(4.11) Exercício. Indiquem três aniquiladores distintos para
e2t +p
3 te2t + (cos t)2+ t2 cos(2t) + et (cos(2t) + t2+ t3 sin(3t)).
(4.12) O MÉTODO DOS ANIQUILADORES. Vejamos então como usar o método dos aniquilado-res para resolver a equação
f ′′+ f ′− 2 f = 6et + 2, f (0) = f ′(0) = 3.
Começamos por escrever a equação na forma
(D2+ D− 2) f = 6et + 2 ⇔ (D+ 2) (D− 1) f = 6et + 2.
Neste momento, sabemos resolver imediatamente a equação homogénea correspon-dente:
(D+ 2) (D− 1) f = 0.
As suas soluções são da forma C1 e−2t + C2 et (a solução geral da equação homogénea).Nitidamente, as equações homogéneas são mais fáceis de resolver.
A equação original é não homogénea, pois tem 6et + 2 no lado direito. Esta função éaniquilada por (D − 1)D. Ao aplicarmos este operador a ambos os membros da equaçãooriginal, obtemos
(D2+ D− 2) f = 6et + 2 ⇒ (D− 1)D (D2+ D− 2) f = (D− 1)D (6et + 2) = 0.
Notem que os polinómios em D comutam sempre entre si (conseguem demonstrar?). Porisso, a nova equação, depois de simplificada e fatorizada, fica
(D+ 2) (D− 1)2 D f = 0,
cujas soluções são, como vimos em (4.7),
f = C1e−2t + C2 et︸ ︷︷ ︸
solução homogénea
+ C3 t et + C4︸ ︷︷ ︸
solução particular
.
Mas notem que nem todos os valores de C3 e C4 são compatíveis com a equação original.Na verdade, qualquer outro lado direito (em vez de 6et+2) que tenha o mesmo aniquiladordará origem a soluções desta forma.
Para determinar C3 e C4, substituímos f ? = C3 t et + C4 na equação original (não valea pena incluirmos parcelas da solução homogénea, pois já sabemos que estão no núcleo de(D+ 2) (D− 1), ou seja, que depois de as substituir na equação original e simplificar, a suacontribuição é 0). Temos então
( f ?)′ = C3 et + C3 t et e ( f ?)′′ = C3 et + C3 et + C3 t et = 2C3 et + C3 t et .
54/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 4: EQUAÇÕES DIFERENCIAIS DE ORDEM SUPERIOR
Substituindo na equação original f ′′+ f ′− 2 f = 6et + 2, obtemos
(2C3 et + C3 t et) + (C3 et + C3 t et)− 2(C3 t et + C4) = 6et + 2,
ou simplesmente 3C3 et − 2C4 = 6et + 2. Como et e 1 são linearmente independentes,podemos concluir que os seus coeficientes não se misturam. Assim, obtemos 3C3 = 6 e−2C4 = 2, ou C3 = 2 e C4 = −1. A solução geral (i.e., ignorando as condições iniciais) daequação original é então
f = C1 e−2t + C2 et + 2tet − 1.
Falta-nos apenas determinar C1 e C2, e para isso vamos usar as condições iniciais. Como
f ′ =−2C1 e−2t + C2 et + 2et + 2tet ,
temos f (0) = C1+C2−1= 3 e f ′(0) =−2C1+C2+2= 3. A solução desse sistema é C1 = 1e C2 = 3, pelo que concluímos que
f = e−2t + 3et + 2tet − 1.
(4.13) Vejamos outro exemplo:
f ′′− 2 f ′+ 10 f =−10, f (0) = 0, f ′(0) =−2.
O operador no lado esquerdo é D2 − 2D + 10 = (D − 1)2 + 32, e um aniquilador para afunção do lado direito é D. Assim, vamos querer resolver
((D− 1)2+ 32)D f = 0.
Mas as soluções dessa equação são
f = C1 et cos(3t) + C2 et sin(3t)︸ ︷︷ ︸
solução homogénea
+ C3︸︷︷︸
f ?
.
Como ( f ?)′ = ( f ?)′′ = 0, substituindo f ? na equação original obtemos 10C3 = −10, ouC3 =−1. Logo, a solução geral da equação original é
f = C1 et cos(3t) + C2 et sin(3t)− 1
e a sua derivada é
f ′ = C1 et cos(3t)− 3C1 et sin(3t) + C2 et sin(3t) + 3C2 et cos(3t),
pelo que obtemos f (0) = C1− 1= 0 e f ′(0) = C1+ 3C2 =−2. Ou seja, C1 = 1, C2 =−1, e
f = et cos(3t)− et sin(3t)− 1.
(4.14) Exercício. Determinem a solução geral de cada uma das seguintes equações:(a) f ′′− 8 f ′+ 15 f = 0;(b) f ′′− 8 f ′+ 16 f = 0;(c) f ′′− 8 f ′+ 17 f = 0;
55/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(d) f ′′− 8 f ′+ 20 f = 0;(e) f ′′′− 3 f ′′+ 3 f ′− f = 0.
(4.15) Exercício. Determinem a solução geral de cada uma das seguintes equações:(a) f ′′− 8 f ′+ 15 f = 3e3t + 8et ;(b) f ′′− 8 f ′+ 16 f = 6e4t − 8sin t − cos t;(c) f ′′− 8 f ′+ 17 f =−10tet + 4e4t − 11et ;(d) f ′′− 8 f ′+ 20 f = 12et cos t − 14et sin t;(e) f ′′′− 3 f ′′+ 3 f ′− f = 6et .
(4.16) Exercício. Determinem a solução de cada uma das seguintes equações:(a) f ′′− 8 f ′+ 15 f = 2e5t , f (0) = 1, f ′(0) = 4;(b) f ′′− 8 f ′+ 16 f = 2e5t , f (0) = 1, f ′(0) = 4;(c) f ′′− 8 f ′+ 17 f = 2e5t , f (0) = 1, f ′(0) = 4;(d) f ′′− 8 f ′+ 17 f =−3e4t cos(2t), f (0) = 1, f ′(0) = 4;(e) f ′′− 8 f ′+ 20 f =−3e4t cos(2t), f (0) = 1, f ′(0) = 4;(f) f ′′′− 3 f ′′+ 3 f ′− f = 6et , f (0) = f ′′(0) =−1, f ′(0) = 1.
(4.17) Exercício. Determinem a solução de cada uma das seguintes equações:(a) f ′′− 2 f = 4, f (0) = f ′(0) = 2;(b) f ′′′+ 8 f = 12e−2t , f (0) =−2, f ′(0) =−1, f ′′(0) = 0.
(4.18) PARTE NÃO HOMOGÉNEA DEFINIDA POR TROCOS. Para resolver uma equação como
f ′′− 2 f ′+ 10 f = g, f (0) = 0, f ′(0) =−2,
onde g é uma função definida por troços, temos na verdade de resolver várias equações(uma para cada troço). Por exemplo, digamos que
g(t) =−10, se t < π, e g(t) = 0, se t > π.
Então a nossa solução terá a forma
f (t) = f1(t), se t < π, e f (t) = f2(t), se t > π,
onde f1 é uma solução de
f ′′− 2 f ′+ 10 f =−10, f (0) = 0, f ′(0) =−2,
no troço t < π e f2 é uma solução de
f ′′− 2 f ′+ 10 f = 0
no troço t > π. Uma vez que a função f tem de ser contínua e ter derivada contínua(de outra forma, f ′′ não existiria e a equação original (4.18) não faria sentido), temos
56/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 4: EQUAÇÕES DIFERENCIAIS DE ORDEM SUPERIOR
necessariamente f1(π) = f2(π) e f ′1(π) = f ′2(π), que nos dá as condições iniciais para osegundo troço.
O primeiro troço coincide com o exemplo (4.13), restrito a t < π. Já vimos (verifiquem!)que a solução geral de f ′′ − 2 f ′ + 10 f = −10 é f (t) = C1 et cos(3t) + C2 et sin(3t) − 1.Concretamente, no caso específico em que f (0) = 0 e f ′(0) = −2, vimos que a solução éf1(t) = et cos(3t)−et sin(3t)−1. Calculando os valores em t = π, obtemos f1(π) =−eπ−1e f ′1(π) = 2eπ, e por conseguinte f2(π) =−eπ− 1 e f ′2(π) = 2eπ.
No mesmo exemplo também vimos que a solução geral de f ′′ − 2 f ′ + 10 f = 0 é dadapor f (t) = C1 et cos(3t) + C2 et sin(3t) (onde as constantes podem ou não ser as mesmasque na solução anterior). Usando as condições iniciais para f2, vemos que C1 = 1+ e−π eC2 =−1− 1
3e−π. (Verifiquem!)
Obtemos assim a solução final
f (t) =
(
et cos(3t)− et sin(3t)− 1, se t < π,
(1+ e−π) et cos(3t)− (1+ 13e−π) et sin(3t), se t > π.
(4.19) Exercício. Considerem ainda
f ′′− 2 f ′+ 10 f = g,
e continuem a aproveitar as conclusões do exemplo (4.13).(a) Qual a solução f1 para g = 0 e condições iniciais f1(0) = 0 e f ′1(0) = −2? Mostrem
que f1(π) = 0 e f ′1(π) = 2eπ.(b) Qual a solução f2 para g =−10 e condições iniciais f2(π) = 0 e f ′2(π) = 2eπ?(c) Qual a solução f quando
g(t) = 0, se t < π, e g(t) =−10, se t > π
e as condições iniciais são f (0) = 0 e f ′(0) =−2?
(4.20) Exercício. Considerem agora
f ′′− 8 f ′+ 15 f = g, f (0) = 1, f ′(0) = 4.
Determinem a sua solução em cada um destes casos:
(a) g(t) =
(
2e5t , se t < 1,
0, se t > 1;(b) g(t) =
(
0, se t < 1,
2e5t , se t > 1.
(4.21) COEFICIENTES NÃO CONSTANTES. Como em (3.26), também aqui é razoável perguntaro que se passa quando a equação não tem coeficientes constantes. Olhemos de novo para a(1.2), reescrita ligeiramente:
f ′′− 2
2x + 1f ′ = 1− 4x2.
57/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
Na forma matricial, e chamando y ao vetor, ficamos com
y′(x) =
0 10 2
2x+1
︸ ︷︷ ︸
A(x)
y(x) +
01− 4x2
︸ ︷︷ ︸
b(x)
.
Pela fórmula da variação das constantes (vamos considerar t0 = 0), sabemos que
y(x) =W (x)
W (0)−1 y(0) +
∫ x
0
W (r)−1 b(r)dr
,
onde as colunas de W (t) são soluções do problema homogéneo w′(x) = A(x)w(x), ou seja,são obtidas a partir de soluções de f ′′− 2
2x+1f ′ = 0.
(4.22) Exercício. Mostrem que f1(x) = 1 e f2(x) = x2 + x são soluções da equação homo-génea. Qual a matriz W (x) correspondente? Calculem
C1(x)C2(x)
=W (0)−1 y(0) +
∫ x
0
W (r)−1 b(r)dr
e usem o resultado para mostrar que as soluções da equação original (não homogénea) sãoda forma f (x) = C1(x) f1(x)+C2(x) f2(x). (Daí ser a fórmula da variação das constantes.)
(4.23) Exercício. Considerem agora a equação
x2 f ′′− x f ′+ f = 3x , f (1) = f ′(1) = 0.
Sabendo que f1(x) = x e f2(x) = x log x são soluções da equação homogénea, qual amatriz W (x) correspondente? Qual a solução da equação? O que mudava se mudássemosas condições iniciais?
(4.24) Exercício. Resolvam
(cos x) f ′′+ (sin x) f ′ = (cos x)3, f (0) = 1, f ′(0) = 4,
sabendo que f1(x) = 1 e f2(x) = sin x são soluções da equação homogénea. (De que outrasformas conseguem resolver esta equação?)
(4.25) Exercício. Resolvam
f ′′′− 3
xf ′′+
6
x2 f ′− 6
x3 f = 6x , f (1) =−5, f ′(1) =−8, f ′′(1) = 0,
sabendo que f1(x) = x/2, f2(x) = x2, e f3(x) = x3/2 são soluções da equação homogénea.
58/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 4: EQUAÇÕES DIFERENCIAIS DE ORDEM SUPERIOR
(4.26) RESPOSTAS DE EXERCÍCIOS.
(4.1) f
f ′
f ′′
′=
0 1 00 0 1−c −b −a
ff ′
f ′′
.
λ3 + aλ2 + bλ+ c.
(4.3) 2
3et+ 1
3e−2t 1
3et− 1
3e−2t
23
et− 23
e−2t 13
et+ 23
e−2t
; a equação é a
mesma discutida em (4.12).
(4.9) (a) D− 4. (b) D− 4. (c) D− 3.(d) (D− 4) (D− 3). (e) D− i. (f) D+ i.(g) (D− i) (D+ i). (h) (D− i) (D+ i).(i) (D− 3− 2i)2. (j) (D− 3+ 2i)2.(k) (D− 3− 2i)2 (D− 3+ 2i)2.(l) (D− 3− 2i)2 (D− 3+ 2i)2. (m) (D− 3)3.(n) (D− 3)2 (D− 3− 2i)3 (D− 3+ 2i)3.(o) (D− 2i)4 (D+ 2i)4. (p) D (D− 4i) (D+ 4i).
(4.11) qualquer múltiplo de (D− 2)2 D (D2 +22)3 (D− 1)3 ((D− 1)2 + 22) ((D− 1)2 + 32)4.
(4.14) (a) C1 e3t + C2 e5t . (b) C1 e4t + C2 te4t .(c) C1 e4t cos t + C2 e4t sin t.(d) C1 e4t cos(2t) + C2 e4t sin(2t).(e) C1 et + C2 tet + C3 t2 et .
(4.15) (a) C1 e3t + C2 e5t − 32
te3t + et .
(b) C1 e4t +C2 te4t +3t2 e4t − 112289
sin t− 79289
cos t.
(c) C1 e4t cos t + C2 e4t sin t − tet − 1710
et + 4e4t .
(d) C1e4t cos(2t)+C2e4t sin(2t)+ et
3cos t−4et
3sin t.
(e) C1 et + C2 tet + C3 t2 et + t3 et .
(4.16) (a) te5t + e3t . (b) 2e5t − e4t − 2te4t .(c) e5t − e4t sin t. (d) e4t cos(2t).(e) e4t cos(2t)− 3
4te4t sin(2t).
(f) t3 et − 2t2 et + 2tet − et .
(4.17) (a) −2+
2+ 1p2
ep
2 t +
2− 1p2
e−p
2 t .
(b) te−2t − 2et cos(p
3 t).
(4.19) (a) − 23et sin(3t).
(b)−et−π cos(3t) + 1
3et−π sin(3t)− 2
3et sin(3t)− 1.
(c)§− 2
3et sin(3t), se t < π,
−et−π cos(3t)+ 13
et−π sin(3t)− 23
et sin(3t)−1, se π < t.
(4.20) (a) f (t) =§
te5t+e3t , se t < 1,32
e5t+(1− 12
e2) e3t , se t > 1.
(b) f (t) =§ 1
2e5t+ 1
2e3t , se t < 1,
−e5t+te5t+( 12+ 1
2e2) e3t , se t > 1.
(4.22) W (x) =h
1 x2+x0 2x+1
i
;
C1(x) = f (0)− 12
x2 + 13
x3 + 12
x4;C2(x) = f ′(0) + x − x2.
(4.23) W (x) =h
x x log x1 log x+1
i
; f (x) = 32
x (log x)2.
(4.24) f (x) = 12(sin x)2 + 1+ 4sin x .
(4.25) f (x) = x4 − 6x2, em x > 0.
59/99
EPISÓDIO 5
TRANSFORMADA DE LAPLACE
O nosso tópico neste episódio é a transformada de Laplace. O seu principal efeito é trans-formar derivadas em produtos por variáveis. Ou seja, transformar equações diferenciais emequações algébricas. Por exemplo, f ′′− 13 f ′+ 42 f = 0 transforma-se em
(s2 F(s)− s f (0)− f ′(0))− 13 (s F(s)− f (0)) + 42F(s) = 0
(é tradicional chamar F(s) à transformada de f (t)). Daqui é fácil obter F(s), o que signi-fica que, se tivermos uma forma prática de inverter a transformada de Laplace, temos ummétodo alternativo de resolução de equações.
(5.1) FUNÇÕES DEFINIDAS POR TROÇOS. Como vamos lidar com funções definidas por troços,começamos por introduzir as funções de Heaviside. Definimos
Ha : t 7→(
1, se t > a,
0, se t < a.
(Notem que não especificamos Ha(a), porque não tem qualquer papel no que vamos fazer.)Esta função permite-nos “cortar” o gráfico de uma função f e ficar apenas com a parte dográfico à direita de a, pois
(Ha f )(t) =
(
f (t), se t > a,
0, se t < a.
(Mais uma vez, não especificamos o valor da função na fronteira entre troços.)A mesma notação pode ser generalizada para descrever funções com mais troços, pois
se a < b então
(Ha −Hb)(t) =
(
1, se a < t < b,
0, se t < a ou b < t
(verifiquem). Isto permite-nos escrever a função
g : t 7→
et , se t <−1,
cos t + 1, se −1< t < 2,
e3t , se 2< t < 3,
e3t + e5t , se 3< t
como
et (1−H−1) + (cos t + 1) (H−1−H2) + e3t (H2−H3) + (e3t + e5t)H3
= et (1−H−1) + (cos t + 1) (H−1−H2) + e3t H2+ e5t H3.
60/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 5: TRANSFORMADA DE LAPLACE
Reparem que (1−H−1) corresponde a manter o gráfico da função desde −∞ até −1. Repa-rem também que na segunda versão e3t se mantém de 2 em diante (tanto no troço 2< t < 3como no troço 3< t) e que e5t se mantém de 3 em diante.
Da mesma forma, podemos reconstituir uma função por troços a partir da expressãocom funções de Heaviside. Por exemplo, se
h(t) = e3t H2(t) + e4t H5(t) + (e5t − e3t)H6(t),
vemos que os pontos que separam os diferentes troços são 2, 5, e 6. A primeira parcela só étida em conta à direita de 2, a segunda parcela só é tida em conta à direita de 5, e a terceiraparcela só é tida em conta à direita de 6. Ficamos então com
h(t) =
0, se t < 2,
e3t , se 2< t < 5,
e3t + e4t , se 5< t < 6,
e3t + e4t + (e5t − e3t), se 6< t.
(5.2) Exercício. Usem funções de Heaviside para escrever estas funções:
(a)
¨
et , se t < 1,et + e2t , se 1< t;
(b)
¨
et , se t < 1,e2t , se 1< t;
(c)
¨
e3t , se −2< t < 1,e2t , se 1< t;
(d)
t2, se 0< t < 3,
cos t, se 3< t < 5,
sin t, se 5< t;
(e)
t2, se 0< t < 1,
et , se 1< t < e,
t e, se e < t;
(f)
t − t2, se 1< t < 2,
t2+ et , se 2< t < 4,
1− et , se 4< t < 6.
(5.3) Exercício. Escrevam estas funções na forma tradicional (descrição por troços):
(a) Hπ+H2− 3H5; (b) Hπ+H2− 3H5+ 5H1;
(c) Hπ+H2− 3H5+ 5H1− 2; (d) H3(t) et +H2(t) e
2t −H1(t) et ;
(e) H0(t) + cos(3t)H−1(t); (f) H0(t) + cos(3t)H−1(t) + et .
(5.4) Exercício. Calculem estes integrais:
(a)
∫ 4
0
H2(t)dt; (b)
∫ 4
0
H2(t) t dt;
(c)
∫ 4
0
H−2(t)dt; (d)
∫ 4
0
H−2(t) +H2(t) t +H5(t)dt .
(5.5) A TRANSFORMADA DE LAPLACE. Vamos considerar apenas funções f cujo primeiro troçoé nulo (ou seja, todas as parcelas envolvem uma função de Heaviside) e satisfazendo umacondição do género | f (t)| ≤ Ceat (onde a, C ∈ R são fixos para cada função, mas podem ser
61/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
diferentes para funções diferentes). Definimos a transformada de Laplace de uma tal funçãopor
L f (s) =∫ ∞
−∞e−st f (t)dt,
onde s é uma variável complexa. Frequentemente vamos usar a abreviatura
Lc f (s) =LHc f (s) =∫ ∞
−∞e−st Hc(t) f (t)dt =
∫ ∞
c
e−st f (t)dt .
Mas notem que esta abreviatura não é de modo nenhum “oficial”. Vamos usá-la só porquesimplifica as coisas, mas não contem encontrá-la com o mesmo significado noutros sítios.O mais habitual é usar apenas funções f definidas em ]0,+∞[, e portanto a transformadade Laplace que encontram habitualmente é aquilo a que estamos a chamar L0 f . Vamostambém usar essa convenção: se falarmos em “transformada de Laplace de f ” sem indicarum valor de c e se f não envolver funções de Heaviside (ou seja, se não houver nenhumvalor de c implícito), então vamos assumir que se trata de c = 0.
Se fizermos a mudança de variável (qual?), podemos observar que
Lc f (t)(s) =∫ ∞
c
e−st f (t)dt =
∫ ∞
0
e−s (t+c) f (t + c)dt
= e−cs
∫ ∞
0
e−st f (t + c)dt = e−csL0 f (t + c)(s),
ou, alternativamente,Lc f (t − c)(s) = e−csL0 f (t)(s)
(conseguem traduzir de uma versão para a outra?).
(5.6) Começamos por calcular
L0eat=∫ ∞
0
e−st+at dt =
∫ ∞
0
e−(s−a) t dt = limT→∞
∫ T
0
e−(s−a) t dt
= limT→∞
− e−(s−a) t
s− a
T
t=0=− lim
T→∞e−(s−a) T
s− a+
1
s− a=
1
s− a.
Notem que a primitiva (feita no início da segunda linha) só é válida se s 6= a e que o limitefinal só existe se Re s > a. (Conseguem verificar que o integral original, mesmo com aprimitiva correta, também não converge se s 6= a?) Temos também
Lceat= e−csL0ea (t+c)= e−cs eacL0eat= e−(s−a) c
s− a.
Algo semelhante se passa com funções f satisfazendo | f (t)| ≤ Ceat (ou seja, funções fdominadas por alguma exponencial). Usando s0 = Re s:
Lc f (t)
=
∫ ∞
c
e−st f (t)dt
≤∫ ∞
c
e−s0 t | f (t)|dt
≤ C
∫ ∞
c
e−s0 t eat dt = C Lceat(s0) = Ce−(s0−a) c
s0− a,
62/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 5: TRANSFORMADA DE LAPLACE
o que mostra que o integral impróprio definindo La f está bem definido pelo menos nosemiplano direito Re s > a. (Veem porquê?)
Embora o integral só esteja bem definido num semiplano direito, para as funções f quevamos considerar, a funçãoLa f pode ser estendida a todo o plano complexo (exceto numnúmero finito de polos); todos os polos ficam fora desse semiplano direito.
(5.7) Exercício. Determinem as transformadas de Laplace das seguintes funções:
(a) e5t ; (b) 3e5t ; (c) H2(t) e5t ; (d) e2i t ;
(e) 10e4t + e5t ; (f) 3e4t − e6t ; (g) H0(t) e4t −H2(t) e
5t ; (h)
¨
e4t ,se 0< t < 2,e5t ,se 2< t.
Recordem a convenção que estamos a usar: se não houver indicação em contrário, assumi-mos que as funções são não-nulas apenas em ]0,+∞[ (e neste caso, L f =L0 f ).
(5.8) Exercício. Quais as funções com estas transformadas de Laplace?
(a)1
s− 3; (b)
20
s− 3; (c)
20
s− 3− 4
s− 5; (d)
e−2s
s;
(e)e−2 (s−1)
s− 1; (f)
e−2s
s− 1+
e2
s; (g)
3
(s− 1) (s+ 2); (h)
e−s + 1
s2− 1.
(5.9) Conhecendo a transformada de Laplace da exponencial, podemos facilmente obter atransformada de Laplace dos senos e cossenos, usando
L0eat ei bt=L0e(a+bi) t= 1
s− a− bi.
Ficamos então com
L0eat cos(bt)=L0
¨
eat ei bt + e−i bt
2
«
= 12L0e(a+bi) t+ 1
2L0e(a−bi) t
=1
2(s− a− bi)+
1
2(s− a+ bi)=
s− a+ bi+ s− a− bi
2(s− a− bi) (s− a+ bi)
=(s− a)
(s− a)2+ b2 .
Da mesma forma,
L0eat sin(bt)=L0
¨
eat ei bt − e−i bt
2i
«
= 12iL0e(a+bi) t − 1
2iL0e(a−bi) t
=1
2i(s− a− bi)− 1
2i(s− a+ bi)=(s− a+ bi)− (s− a− bi)2i(s− a− bi) (s− a+ bi)
=b
(s− a)2+ b2 .
(Podemos usar o método do final de (5.5) para calcular Lceat cos(bt) e Lceat sin(bt).Mas como podem constatar rapidamente, o resultado não é nada de especial. . . )
63/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(5.10) Exercício. Quais as transformadas de Laplace destas funções? Recordem que senão houver indicação em contrário, assumimos que as funções são não-nulas apenas em]0,+∞[ (e neste caso, L f =L0 f ).
(a) e3t sin(5t); (b) e3t (cos(5t))2; (c) Hπ(t) e3t sin(5t); (d) Hπ(t) e
3t (sin(5t))2.
(5.11) Exercício. Quais as transformadas de Laplace das funções do exercício (5.3)?
(5.12) Exercício. Quais as funções cujas transformadas são as seguintes? Usem funções deHeaviside ou descrevam os troços individualmente. (Pode ser útil rever o final de (5.5).)
(a)s− 3
s2− 6s+ 25; (b)
3
s2− 6s+ 25; (c)
s
s2− 6s+ 25;
(d)s− 4
s2− 6s+ 25; (e)
1
s2− 2s+ 2; (f)
(s2− 2s+ 2)− s
s (s2− 2s+ 2);
(g)3
(s2− 2s+ 2) (s2− 2s+ 5); (h)
1
s2− 2s+ 2+
e2s
s; (i)
e2s
s2− 2s+ 2.
(5.13) Continuamos a nossa exploração das propriedades da transformada de Laplace, com
Lc f ′(t)(s) =∫ ∞
c
e−st f ′(t)dt = limT→∞
∫ T
c
e−st f ′(t)dt .
Usando integração por partes, obtemos
∫ T
c
e−st f ′(t)dt =
e−st f (t)T
t=c+
∫ T
c
se−st f (t)dt,
o que nos leva (como?) a
Lc f ′(t)(s) =−e−cs f (c) + sLc f (s).
Já agora, é razoável perguntar qual a derivada (em ordem a s) deLa f (s). Assumindoque podemos derivar a função integranda em ordem a s, ficamos com
ddsLc f =
dds
∫ ∞
c
e−st f (t)dt =
∫ ∞
c
∂ e−st
∂ sf (t)dt =
∫ ∞
c
−te−st f (t)dt =−Lct f (t).
Porém, é preciso algum cuidado: não só estamos a assumir que podemos trocar a derivadaem ordem a s com o integral em ordem a t, mas o integral em ordem a t é um integralimpróprio, pelo que estamos na verdade a trocar a derivada do limite de um integral pelolimite de um integral da derivada.
Prossigamos então com mais cuidado. Temos (verifiquem que os passos são seguros)
ddsLc f (s) = lim
h→0
Lc f (s+ h)−Lc f (s)h
= limh→0
limT→∞
∫ T
ce−(s+h) t f (t)dt−
∫ T
ce−st f (t)dt
h
= limh→0
limT→∞
∫ T
c
e−(s+h) t − e−st
hf (t)dt = lim
h→0lim
T→∞
∫ T
c
e−ht − 1
he−st f (t)dt .
64/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 5: TRANSFORMADA DE LAPLACE
Para podermos continuar, precisávamos que o limite com h→ 0 estivesse dentro do integral.Mas como
limh→0
e−ht − 1
h=−t
(trata-se da derivada de e−ht em ordem a h), sabemos que para qualquer ε > 0 existe δ > 0tal que
|h|< δ ⇒
e−ht − 1
h+ t
< ε.
Recordem agora que estamos a assumir que | f (t)| ≤ Ceat para constantes a, C ∈ R. Então,para |h|< δ, temos
limT→∞
∫ T
c
e−ht − 1
he−st f (t)dt− lim
T→∞
∫ T
c
(−t) e−st f (t)dt
=
limT→∞
∫ T
c
e−ht − 1
h+ t
e−st f (t)dt
≤ limT→∞
∫ T
c
e−ht − 1
h+ t
e−st | f (t)|dt
≤ Cε limT→∞
∫ T
c
e−st eat dt = CεLceat= Cεe−(s−a) c
s− a.
Daqui concluímos (porquê?) que
limh→0
limT→∞
∫ T
c
e−ht − 1
h+ t
e−st f (t)dt = 0,
o que nos leva (como?) a
limh→0
limT→∞
∫ T
c
e−ht − 1
he−st f (t)dt = lim
T→∞
∫ T
c
−t e−st f (t)dt,
que é o que precisávamos para continuar o nosso cálculo. Voltando a ele:
ddsLc f (s) = lim
h→0lim
T→∞
∫ T
c
e−ht − 1
he−st f (t)dt
= limT→∞
∫ T
c
−t e−st f (t)dt =−Lct f (t)(s).
(5.14) Exercício. Usem este resultado para calcular Lctk eat.
(5.15) Resumindo tudo o que dissemos:
Lc f (t − c)= e−csL0 f (t), Lc f ′= sLc f − e−cs f (c),
Lct f (t)=− ddsLc f (s), L0tk eat= k!
(s− a)k+1,
L0eat cos(bt)= s− a
(s− a)2+ b2 , L0eat sin(bt)= b
(s− a)2+ b2 .
65/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(5.16) Exercício. Quais as transformadas de Laplace das funções do exercício (4.9)?
(5.17) Exercício. Qual a transformada inversa de cada uma destas funções?
(a)s
s2+ 1; (b)
s
s2− 1; (c)
−2s
(s2− 1)2;
(d)2s
(s2+ 1)2; (e)
s− 1
(s2− 2s+ 10)2; (f)
1
(s− 1)6;
(g)s− 1
(s− 1)6; (h)
s
(s− 1)6; (i)
e3s
(s− 1)6.
(5.18) RESOLUÇÃO DE EDOS USANDO TRANSFORMADA DE LAPLACE. Mas o que tem a transfor-mada de Laplace a ver com equações diferenciais? Por exemplo, conseguimos resolver aequação
f ′ = 3 f , f (0) = 12
usando a transformada de Laplace? Sim.É tradicional usar maiúsculas, como F , para a transformada de Laplace de funções em
minúsculas, como f . Ou seja, é comum escrever F(s) =L0 f (t)(s) (e aqui vamos sempreusar a transformada com c = 0). Aplicando a transformada a ambos os membros da equaçãodiferencial, ficamos com
L f ′=L3 f .Mas
L f ′= sL f − f (0) = s F(s)− 12 e L3 f = 3L f = 3F(s),
o que nos leva à equaçãos F(s)− 12= 3F(s).
Reparem que esta equação já não envolve derivadas: transformámos uma equação diferen-cial numa equação algébrica. De facto, é fácil resolvê-la:
s F(s)− 3F(s) = 12 ⇔ F(s) =12
s− 3.
Nem sequer precisamos de nos preocupar com o caso s = 3: estamos já no mundo dasfunções meromorfas, e estamos apenas a constatar que F tem um polo em s = 3.
Temos assim
L0 f =LH0 f = 12
s− 3.
Assumindo que a transformada de Laplace é injetiva, concluímos que
H0(t) f (t) = 12H0(t) e3t , ou f (t) = 12e3t .
Este raciocínio é potencialmente subtil. A solução f que procuramos é uma função con-tínua com derivada contínua (porquê?). Mas a transformada de Laplace só opera sobrefunções com o primeiro troço nulo. Mais: como temos a condição inicial em t = 0, e como
66/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 5: TRANSFORMADA DE LAPLACE
Lc f ′ =LHc f ′ envolve f (c), convém-nos cortar a função em t = 0. Assim, o que real-mente usamos é L0 f = LH0 f e L0 f ′ = LH0 f ′. Assim, no final quem obtemos(invertendo a transformada de Laplace) é H0 f .
(5.19) Exercício. Resolvam estas equações diferenciais:(a) f ′− 3 f = 2et , f (0) = 0;(b) f ′− 3 f = 2et , f (0) = 1;(c) f ′− 3 f = e3t , f (0) = 2;(d) f ′− 3 f =−3, f (0) = 3;(e) f ′− 3 f = e3t − 2et , f (0) = 4.
(5.20) Vejamos outro exemplo. Vamos resolver outra vez a equação (4.12)
f ′′+ f ′− 2 f = 6et + 2, f (0) = f ′(0) = 3.
Temos
L f ′= s F(s)− f (0) = s F(s)− 3,
L f ′′= sL f ′ − f ′(0) = s (s F(s)− 3)− 3= s2 F(s)− 3s− 3,
portanto a equação original passa a
(s2 F(s)− 3s− 3)︸ ︷︷ ︸
L f ′′+(s F(s)− 3)︸ ︷︷ ︸
L f ′−2 F(s)︸︷︷︸
L f =
6
s− 1︸︷︷︸
L6et
+2
s︸︷︷︸
L2
,
ou, depois de simplificar,
(s2+ s− 2s) F(s) = 3s+ 6+6
s− 1+
2
s.
Resolvendo em ordem a F(s) e fatorizando o denominador, chegamos a
F(s) =3(s+ 2) + 6
s−1+ 2
s
(s+ 2) (s− 1)=
3
s− 1+
6
(s− 1)2 (s+ 2)+
2
s (s+ 2) (s− 1).
Para continuar, precisamos de decompor as duas últimas frações em frações parciais. Temos
6
(s− 1)2 (s+ 2)+
2
s (s+ 2) (s− 1)=
2(s+ 2)− 2(s− 1)(s− 1)2 (s+ 2)
+2s− 2(s− 1)
s (s+ 2) (s− 1)
=2
(s− 1)2− 2
(s− 1) (s+ 2)+
2
(s− 1) (s+ 2)− 2
s (s+ 2)
=2
(s− 1)2− (s+ 2)− s
s (s+ 2)=
2
(s− 1)2− 1
s+
1
s+ 2.
Assim, chegamos a
F(s) =3
s− 1+
2
(s− 1)2− 1
s+
1
s+ 2=L03et + 2tet − 1+ e−2t
e concluímos quef (t) = 3et + 2tet − 1+ e−2t .
67/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(5.21) Exercício. Escolham condições iniciais em t = 0 para as equações de (4.14) e (4.15).Usem a transformada de Laplace para resolver essas equações usando essas condições iniciais.Que adaptações é preciso fazer se não conhecermos as condições iniciais?
(5.22) A TRANSFORMADA INVERSA. Por esta altura, já devem ter reparado que, mesmo játendo F(s), nem sempre é imediato determinar a função f (s) original. Por vezes, é maisrápido usar a transformada inversa.
Se o integral que define F(s) =Lc f (s) =LHc f (s) (onde f é alguma função domi-nada por eat) convergir em Re s > a, então a transformada inversa é
L−1F(t) = (Hc f )(t) =1
2πilim
T→∞
∫ b+iT
b−iT
est F(s)ds,
onde b é um real em Re s > a e o integral é feito ao longo de um segmento de reta. (Nãovamos tentar provar este resultado.) É prático escrever este integral com uma notaçãoligeiramente diferente:
(Hc f )(t) =1
2πi
∫ b+i∞
b−i∞est F(s)ds .
Reparem que a expressão de L−1F não depende do ponto c onde começa o pri-meiro troço de Hc f . Porém, se estivermos a considerar alguma função f que não está“cortada” para trás de nenhum c, temos de a “cortar” (ou seja, temos de escolher algumc—tipicamente o ponto onde temos condições iniciais—e calcular Lc f ), e a função queobtemos a partir deste novo integral é a função “cortada”.
Notem também que a exponencial neste integral (que define a transformada inversaL−1F) tem o sinal oposto da exponencial no integral que define a transformada direta(isto é, a transformada original L f ). Isto é um fenómeno habitual com transformadasintegrais (essencialmente, porque todas são casos particulares de uma transformada maisgeral que tem essa propriedade).
Outro ponto importante é que a reta ao longo da qual calculamos o integral (a retavertical Re s = b) está contida na região Re s > a (isto é, b > a), onde a é a constante daexponencial eat que domina f . Em particular, F não tem quaisquer singularidades à direitadessa reta.
Vamos usar o teorema dos resíduos para calcular o integral da transformada inversa.Deste ponto em diante vamos considerar apenas funções F satisfazendo
|F(s)| ≤ C
e−ds
sk
, quando s→∞,
onde C , d ∈ R e k é um inteiro positivo. (Como só nos interessa o comportamento quandos→∞, não se justifica ajustar esta condição de modo a dar-lhe sentido em s = 0.) Notemque todas as transformadas com que temos lidado satisfazem esta condição.
Vamos concluir que, se t < d e a reta Re s = b estiver à direita de todos os polos de F(s),então
1
2πi
∫ b+i∞
b−i∞est F(s)ds = 0.
68/99
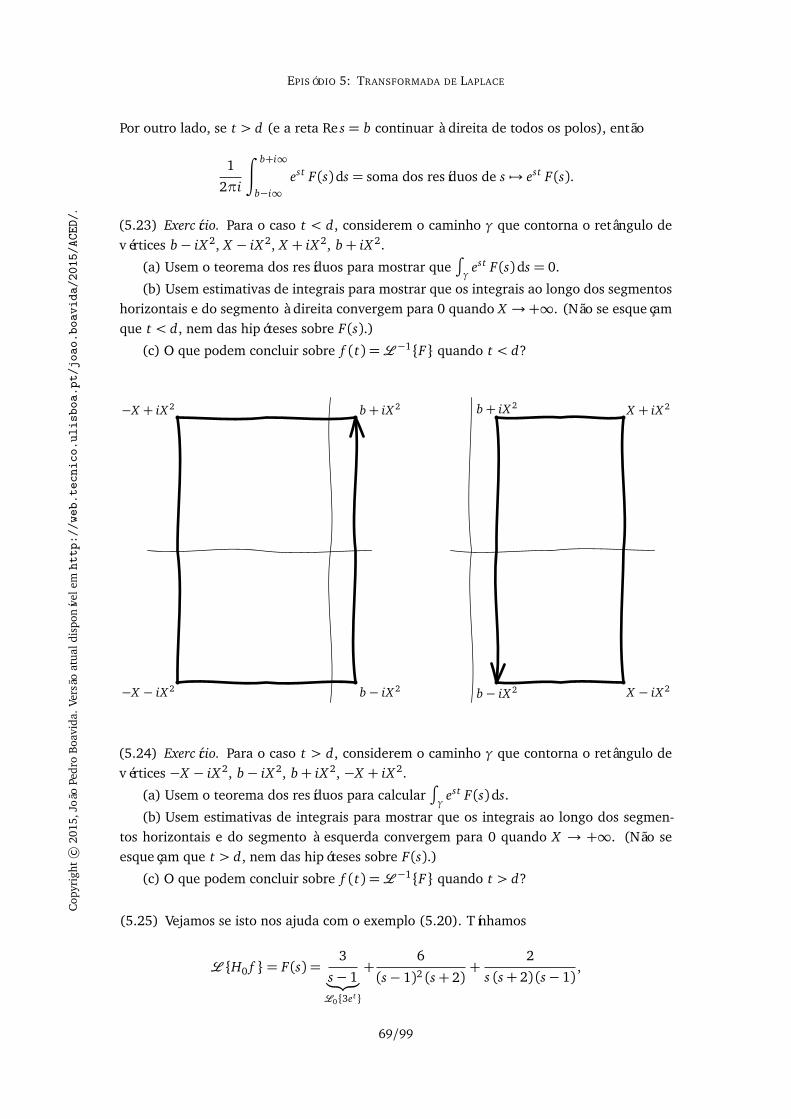
Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 5: TRANSFORMADA DE LAPLACE
Por outro lado, se t > d (e a reta Re s = b continuar à direita de todos os polos), então
1
2πi
∫ b+i∞
b−i∞est F(s)ds = soma dos resíduos de s 7→ est F(s).
(5.23) Exercício. Para o caso t < d, considerem o caminho γ que contorna o retângulo devértices b− iX 2, X − iX 2, X + iX 2, b+ iX 2.
(a) Usem o teorema dos resíduos para mostrar que∫
γest F(s)ds = 0.
(b) Usem estimativas de integrais para mostrar que os integrais ao longo dos segmentoshorizontais e do segmento à direita convergem para 0 quando X →+∞. (Não se esqueçamque t < d, nem das hipóteses sobre F(s).)
(c) O que podem concluir sobre f (t) =L−1F quando t < d?
b− iX 2
b+ iX 2−X + iX 2
−X − iX 2 b− iX 2 X − iX 2
X + iX 2b+ iX 2
(5.24) Exercício. Para o caso t > d, considerem o caminho γ que contorna o retângulo devértices −X − iX 2, b− iX 2, b+ iX 2, −X + iX 2.
(a) Usem o teorema dos resíduos para calcular∫
γest F(s)ds.
(b) Usem estimativas de integrais para mostrar que os integrais ao longo dos segmen-tos horizontais e do segmento à esquerda convergem para 0 quando X → +∞. (Não seesqueçam que t > d, nem das hipóteses sobre F(s).)
(c) O que podem concluir sobre f (t) =L−1F quando t > d?
(5.25) Vejamos se isto nos ajuda com o exemplo (5.20). Tínhamos
LH0 f = F(s) =3
s− 1︸︷︷︸
L03et
+6
(s− 1)2 (s+ 2)+
2
s (s+ 2) (s− 1),
69/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
queremos determinar f . Para a primeira parcela nem precisamos da transformada inversa,pois é imediato que a função original é
L−1
3
s− 1
= H0(t)
3et.
A função original para a segunda parcela é
L−1
6
(s− 1)2 (s+ 2)
=1
2πi
∫ 2+i∞
2−i∞
6est
(s− 1)2 (s+ 2)ds .
Se t < 0, sabemos que o resultado é 0. Se t > 0, precisamos dos resíduos. Temos um polosimples em s = −2 e um polo duplo em s = 1. Os seus resíduos são dados pela fórmula deCauchy:
Ress=−2
6est
(s− 1)2 (s+ 2)=
6est
(s− 1)2
s=−2
=6e−2t
(−3)2=
2
3e−2t ,
Ress=1
6est
(s− 1)2 (s+ 2)=
6est
s+ 2
′
s=1
=
6test(s+ 2)− 6est
(s+ 2)2
s=1
= 2tet − 2
3et .
Ou seja, a função original é H0(t)2
3e−2t + 2tet − 2
3et.
Finalmente, a função original para a terceira parcela é
L−1
2
s (s+ 2) (s− 1)
=1
2πi
∫ 2+i∞
2−i∞
2es t
s (s+ 2) (s− 1)ds .
Como o integral só é não-nulo se t > 0 e como todas as singularidades são polos simples,ficamos com
H0 ·
Ress=0+ Res
s=−2+Res
s=1
= H0(t)
2est
(s+ 2) (s− 1)
s=0+ 2est
s (s− 1)
s=−2+ 2est
s (s+ 2)
s=1
= H0(t)
−1+1
3e−2t +
2
3et
.
Juntando as três parcelas, chegamos a
(H0 f )(t) = H0(t)
3et+H0(t)2
3e−2t + 2tet − 2
3et+H0(t)
−1+ 13e−2t + 2
3et
= H0(t) (3et + e−2t + 2tet − 1).
(5.26) Vejamos um último exemplo, desta vez com uma função definida por troços. Aequação
f ′′− 2 f ′+ 10 f =−10Hπ, f (0) = 0, f ′(0) =−2
pode ser resolvida usando a transformada de Laplace. Se F =L0 f , temos
L0 f ′= s F(s)− f (0) = s F(s),
L0 f ′′= s2 F(s)− s f (0)− f ′(0) = s2 F(s) + 2,
L0−10Hπ=−10e−πs
s.
70/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 5: TRANSFORMADA DE LAPLACE
Assim, ao aplicarmos a transformada de Laplace à equação original obtemos
(s2 F(s) + 2)− 2(s F(s)) + 10F(s) =−10e−πs
s,
que nos leva a
F(s) =− 2
s2− 2s+ 10− 10e−πs
s (s2− 2s+ 10).
Para determinar H0 f , vamos separar F(s) em parcelas, de acordo com as exponenciaisenvolvidas (pois a exponenciais com constantes diferentes, correspondem troços diferentesonde a função que procuramos é não-nula). Notamos ainda que
s2− 2s+ 10= (s− 1− 3i) (s− 1+ 3i) = (s− 1)2+ 32.
A função original é então dada por
(H0 f )(t) =L−1
¨ −2e−0t
(s− 1)2+ 32
«
+L−1
¨ −10e−πs
s (s− 1− 3i) (s− 1+ 3i)
«
.
A primeira parcela é não-nula apenas quando t > 0. De facto, podemos reconhecê-ladiretamente:
L−1 −2
(s− 1)2+ 32
=−2
3L−1
3
(s− 1)2+ 32
=−2
3H0(t) e
t sin(3t).
A segunda parcela é
L−1
¨ −10e−πs
s (s− 1− 3i) (s− 1+ 3i)
«
=1
2πi
∫ 2+i∞
2−i∞
−10e(t−π) s
s (s− 1− 3i) (s− 1+ 3i)ds
(reparem que todos os polos estão à esquerda da reta vertical Re s = 2, por isso podemosusá-la no integral). Se t < π, este integral é 0. De contrário, somamos todos os resíduos.Posto de outra forma,
L−1
¨
10e−πs
s (s− 1− 3i) (s− 1+ 3i)
«
= Hπ(t)
Ress=0+ Res
s=1+3i+ Res
s=1−3i
= Hπ(t)
−10e(t−π) s
(s− 1− 3i) (s− 1+ 3i)
s=0+ −10e(t−π) s
s (s− 1+ 3i)
s=1+3i+ −10e(t−π) s
s (s− 1− 3i)
s=1−3i
= Hπ(t)
−1− 10e(1+3i) (t−π)
(1+ 3i) (1+ 3i− 1+ 3i)− 10e(1−3i) (t−π)
(1− 3i) (1− 3i− 1− 3i)
.
Nem sempre é útil, mas neste caso vamos simplificar um pouco mais. Vamos usar u= t −πe 10= (1− 3i) (1+ 3i). Ficamos então com
− 1− 10e(1+3i) (t−π)
(1+ 3i) (1+ 3i− 1+ 3i)− 10e(1−3i) (t−π)
(1− 3i) (1− 3i− 1− 3i)
=−1− (1− 3i) e(1+3i)u
6i− (1+ 3i) e(1−3i)u
−6i=−1− e(1+3i)u− e(1−3i)u
6i+
e(1+3i)u+ e(1−3i)u
2
=−1− 1
3eu sin(3u) + eu cos(3u) =−1− 1
3et−π sin(3t − 3π) + et−π cos(3t − 3π)
71/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
Juntando tudo, obtemos (finalmente)
(H0 f )(t) =−23H0(t) e
t sin(3t) +Hπ(t)−1− 1
3et−π sin(3t − 3π) + et−π cos(3t − 3π)
=−23H0(t) e
t sin(3t) +Hπ(t)−1+ 1
3et−π sin(3t)− et−π cos(3t)
.
(5.27) Exercício. Escrevam esta função H0 f sem usar funções de Heaviside (isto é, na formahabitual, por troços). Façam o mesmo com f . Comparem este método com o que usámosno exercício (4.19).
(5.28) Exercício. Conseguem ver a relação entre a mudança de variável que fizemos aindaagora (u = t −π) e a mudança de variável que fizemos no final de (5.5)? A partir daí, con-seguem encontrar uma forma um pouco mais “arrumada” de obter a transformada inversade uma parcela envolvendo exponenciais? Qual a relação entre o parâmetro na exponenciale a função de Heaviside que ocorre na resposta final?
(5.29) Exercício. Usem a transformada de Laplace para resolver as equações de (4.16).
(5.30) Exercício. Usem a transformada de Laplace para resolver as equações de (4.17).
(5.31) Exercício. Usem a transformada de Laplace para resolver as equações de (4.20).
72/99
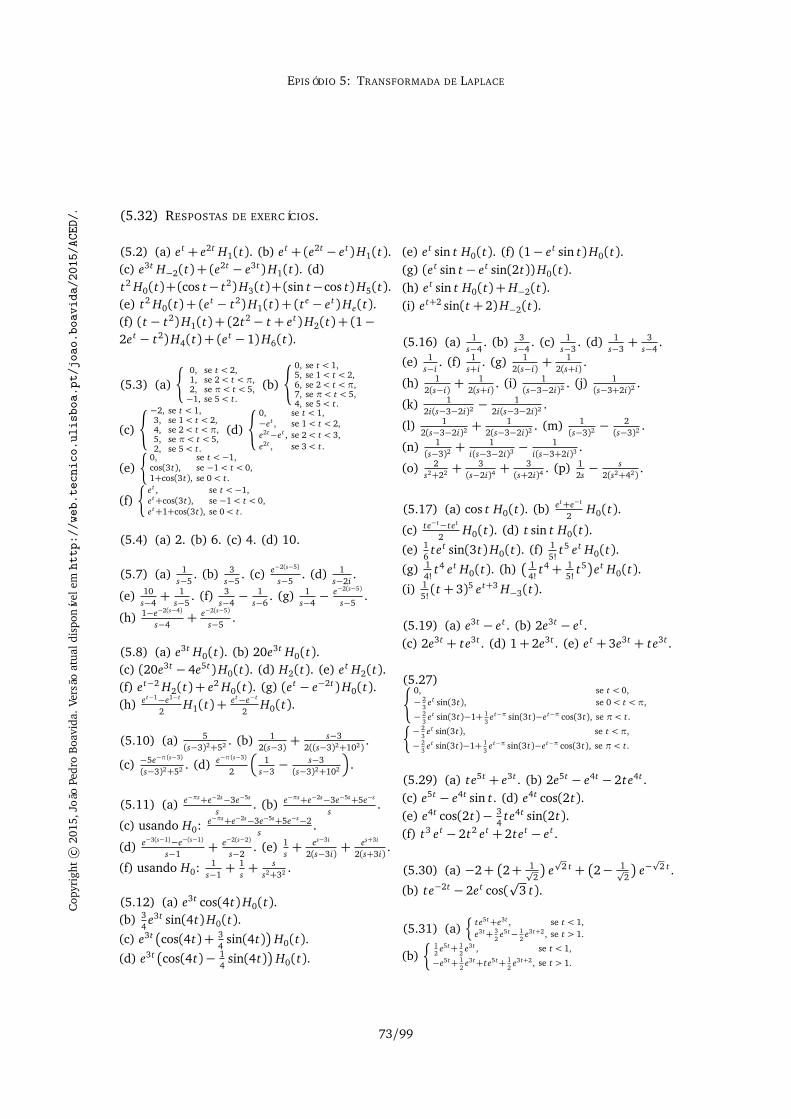
Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 5: TRANSFORMADA DE LAPLACE
(5.32) RESPOSTAS DE EXERCÍCIOS.
(5.2) (a) et + e2t H1(t). (b) et +(e2t − et)H1(t).(c) e3t H−2(t) + (e2t − e3t)H1(t). (d)t2 H0(t)+(cos t− t2)H3(t)+(sin t−cos t)H5(t).(e) t2 H0(t) + (et − t2)H1(t) + (t e − et)He(t).(f) (t − t2)H1(t) + (2t2 − t + et)H2(t) + (1−2et − t2)H4(t) + (et − 1)H6(t).
(5.3) (a)
¨ 0, se t < 2,1, se 2< t < π,2, se π < t < 5,−1, se 5< t.
(b)
( 0, se t < 1,5, se 1< t < 2,6, se 2< t < π,7, se π < t < 5,4, se 5< t.
(c)
(−2, se t < 1,3, se 1< t < 2,4, se 2< t < π,5, se π < t < 5,2, se 5< t.
(d)
( 0, se t < 1,−et , se 1< t < 2,e2t−et , se 2< t < 3,e2t , se 3< t.
(e)
0, se t <−1,cos(3t), se −1< t < 0,1+cos(3t), se 0< t.
(f)
et , se t <−1,et+cos(3t), se −1< t < 0,et+1+cos(3t), se 0< t.
(5.4) (a) 2. (b) 6. (c) 4. (d) 10.
(5.7) (a) 1s−5
. (b) 3s−5
. (c) e−2(s−5)
s−5. (d) 1
s−2i.
(e) 10s−4+ 1
s−5. (f) 3
s−4− 1
s−6. (g) 1
s−4− e−2(s−5)
s−5.
(h) 1−e−2(s−4)
s−4+ e−2(s−5)
s−5.
(5.8) (a) e3t H0(t). (b) 20e3t H0(t).(c) (20e3t − 4e5t)H0(t). (d) H2(t). (e) et H2(t).(f) et−2 H2(t) + e2 H0(t). (g) (et − e−2t)H0(t).(h) et−1−e1−t
2H1(t) +
et−e−t
2H0(t).
(5.10) (a) 5(s−3)2+52 . (b) 1
2(s−3)+ s−3
2((s−3)2+102).
(c) −5e−π (s−3)
(s−3)2+52 . (d) e−π (s−3)
2
1s−3− s−3(s−3)2+102
.
(5.11) (a) e−πs+e−2s−3e−5s
s. (b) e−πs+e−2s−3e−5s+5e−s
s.
(c) usando H0: e−πs+e−2s−3e−5s+5e−s−2s
.
(d) e−3(s−1)−e−(s−1)
s−1+ e−2(s−2)
s−2. (e) 1
s+ es−3i
2(s−3i)+ es+3i
2(s+3i).
(f) usando H0: 1s−1+ 1
s+ s
s2+32 .
(5.12) (a) e3t cos(4t)H0(t).(b) 3
4e3t sin(4t)H0(t).
(c) e3tcos(4t) + 34
sin(4t)
H0(t).(d) e3tcos(4t)− 1
4sin(4t)
H0(t).
(e) et sin t H0(t). (f) (1− et sin t)H0(t).(g) (et sin t − et sin(2t))H0(t).(h) et sin t H0(t) +H−2(t).(i) et+2 sin(t + 2)H−2(t).
(5.16) (a) 1s−4
. (b) 3s−4
. (c) 1s−3
. (d) 1s−3+ 3
s−4.
(e) 1s−i
. (f) 1s+i
. (g) 12(s−i)
+ 12(s+i)
.
(h) 12(s−i)
+ 12(s+i)
. (i) 1(s−3−2i)2
. (j) 1(s−3+2i)2
.
(k) 12i(s−3−2i)2
− 12i(s−3−2i)2
.
(l) 12(s−3−2i)2
+ 12(s−3−2i)2
. (m) 1(s−3)2
− 2(s−3)2
.
(n) 1(s−3)2
+ 1i(s−3−2i)3
− 1i(s−3+2i)3
.
(o) 2s2+22 +
3(s−2i)4
+ 3(s+2i)4
. (p) 12s− s
2(s2+42).
(5.17) (a) cos t H0(t). (b) et+e−t
2H0(t).
(c) te−t−tet
2H0(t). (d) t sin t H0(t).
(e) 16
tet sin(3t)H0(t). (f) 15!
t5 et H0(t).(g) 1
4!t4 et H0(t). (h)
14!
t4 + 15!
t5et H0(t).(i) 1
5!(t + 3)5 et+3 H−3(t).
(5.19) (a) e3t − et . (b) 2e3t − et .(c) 2e3t + te3t . (d) 1+ 2e3t . (e) et + 3e3t + te3t .
(5.27)¨ 0, se t < 0,− 2
3et sin(3t), se 0< t < π,
− 23
et sin(3t)−1+ 13
et−π sin(3t)−et−π cos(3t), se π < t.§− 2
3et sin(3t), se t < π,
− 23
et sin(3t)−1+ 13
et−π sin(3t)−et−π cos(3t), se π < t.
(5.29) (a) te5t + e3t . (b) 2e5t − e4t − 2te4t .(c) e5t − e4t sin t. (d) e4t cos(2t).(e) e4t cos(2t)− 3
4te4t sin(2t).
(f) t3 et − 2t2 et + 2tet − et .
(5.30) (a) −2+
2+ 1p2
ep
2 t +
2− 1p2
e−p
2 t .
(b) te−2t − 2et cos(p
3 t).
(5.31) (a)n
te5t+e3t , se t < 1,e3t+ 3
2e5t− 1
2e3t+2, se t > 1.
(b)§ 1
2e5t+ 1
2e3t , se t < 1,
−e5t+ 12
e3t+te5t+ 12
e3t+2, se t > 1.
73/99

EPISÓDIO 6
AS SÉRIES DE FOURIER
Imaginem que queremos resolver a equação
∂ u
∂ t=∂ 2u
∂ x2 .
Como é que alguém poderia resolver uma equação desse género? Na falta de outras ideias,uma opção é tentar encontrar soluções por tentativa e erro. Por exemplo, podemos subs-tituir u(t, x) = T (t) · X (x) e ver o que acontece. Chegamos (como?) a T ′(t) · X (x) =T (t) · X ′′(x). Separando tudo o que tenha t para a esquerda e tudo o que tenha x para adireita, obtemos
T ′(t)T (t)
=X ′′(x)X (x)
.
Se essas duas expressões são iguais, então não podem depender nem de t (porque não há tno lado direito) nem de x (porque não há x no lado esquerdo). Ou seja, são iguais a umaconstante λ. Por exemplo, a segunda equação fica equivalente a
(D2−λ)X = 0
(usando D para indicar a derivada em ordem a x). Suponhamos ainda que 0≤ x ≤ 1 e queu(t, 0) = u(t, 1) = 0 (a condição de fronteira), o que, se T (t) 6= 0, implica X (0) = X (1) = 0.Para termos X (x) 6= 0, precisamos de λ < 0 (isto não é bem assim com outras condições defronteira), e nesse caso as soluções desta última equação diferencial são
X (x) = C1 cos(p
−λ x) + C2 sin(p
−λ x).
Mas para termos X (0) = X (1) = 0, temos necessariamente C1 = 0 ep−λ= πk (para algum
inteiro k). Ou seja, neste momento já sabemos que u(t, x) = T (t) sin(πkx) (absorvemos aconstante C2 na definição de T (t)), que T ′(t) = λT (t), e que λ=−π2 k2.
Usando agora D para representar a derivada em ordem a t, vemos que (D− λ) T = 0,cuja solução é T (t) = eλt T (0). Ou seja, a solução final é um múltiplo de e−π
2 k2 t sin(πkx).Mais geralmente, seria razoável assumir que a solução geral seja da forma
u(t, x) =∑
k>0
bk e−π2 k2 t sin(πkx).
Este é o nosso primeiro exemplo de uma série de Fourier.Neste episódio, falamos um pouco das séries de Fourier e das suas variantes (as séries de
senos e as séries de cossenos). No próximo, vamos ver como usá-las para resolver algumasequações diferenciais parciais (EDPs)—assim chamadas por envolverem derivadas parciais.
74/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 6: AS SÉRIES DE FOURIER
(6.1) FUNÇÕES PERIÓDICAS. Nas próximas páginas vamos trabalhar apenas com funções pe-riódicas seccionalmente C∞. Mais concretamente, vamos fixar um intervalo [A, B] de com-primento ` = B − A, e considerar apenas funções f : R → C seccionalmente C∞ e comperíodo `.
Dizer que f tem período ` é dizer que f (x+`) = f (x) para todo o x ∈ R. Reparem quese a função tem período `, também tem período 2` ou 3` ou −`. Ou seja, da forma comoestamos a definir ter período `, não há nenhuma sugestão de que ` seja o número maispequeno para o qual f (x + `) = f (x). (Conseguem imaginar alguma função com período` para todo o ` > 0? Conseguem imaginar duas funções com período ` para todo o ` ∈ Q?Linearmente independentes?)
E o que queremos dizer com uma função ser seccionalmente C∞? No nosso caso, apenasque existe um número finito de pontos intermédios (que podem ser diferentes de funçãopara função) com A = x0 < x1 < x2 < · · · < xk−1 < xk = B e que em cada subintervalo]x i , x i+1[ a função é a restrição de uma função C∞ definida num intervalo ligeiramentemaior. (Pôr isto desta forma evita algumas complicações com limites laterais das derivadasda função.)
Alternativamente, podemos começar com funções seccionalmente C∞ definidas no in-tervalo ]A, B[ (porquê aberto?) e estendê-las a R de forma a terem período ` = B − A. Defacto, o intervalo exato que escolhemos não é especialmente relevante (porquê?). Porém,nos problemas com que vamos lidar pode ser mais prático lidar com intervalos de certosformatos.
(6.2) PRODUTO INTERNO DE FUNÇÕES PERIÓDICAS. Concentramo-nos então nas funções sec-cionalmente C∞ de período `. Escolhemos qualquer intervalo [A, B] de comprimento ` =B− A, e definimos o seguinte produto interno:
⟨ f , g⟩=∫ B
A
f (x) g(x)dx .
Como habitualmente, a norma correspondente é definida por ‖ f ‖=p
⟨ f , f ⟩.
(6.3) Exercício. Provem as seguintes propriedades deste produto ( f , g, h são funções secci-onalmente C∞ definidas em [A, B], c é um complexo):
(a) ⟨ f , g⟩= ⟨g, f ⟩(b) ⟨c f , g⟩= c⟨ f , g⟩ e ⟨ f , cg⟩= c⟨ f , g⟩;(c) ⟨ f + g, h⟩= ⟨ f , h⟩+ ⟨g, h⟩ e ⟨ f , g + h⟩= ⟨ f , g⟩+ ⟨ f , h⟩;(d) ‖ f ‖ ≥ 0;
(e) se ‖ f ‖= 0, então f = 0.
(6.4) Exercício. Mostrem que se f e g têm período ` e ambos os intervalos [A, B] e [A′, B′]têm comprimento `, então
∫ B
A
f (x) g(x)dx =
∫ B′
A′f (x) g(x)dx .
75/99
JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(6.5) BASE ORTOGONAL PARA FUNÇÕES PERIÓDICAS. Vamos agora concentrar-nos em funçõesde período 2π. Não vamos tentar demonstrar tudo (ou explicar rigorosamente o que asdiferentes afirmações significam), mas a ideia é que temos uma base ortogonal para estasfunções.
Onde vamos buscar uma tal base? Se o operador D (derivação em ordem a x) fossediagonalizável (de novo, sem tentar definir rigorosamente as palavras que usamos em con-textos novos), então esperaríamos ter uma base de vetores próprios. Quem são os vetorespróprios de D? A função f é um vetor próprio de D com valor próprio λ se D f = f ′ = λ f .Conhecemos as soluções dessa equação: são da forma eλx f (0). Mas são periódicas?
(6.6) Exercício. Mostrem que f (x) = eλx f (0) define uma função de período 2π só sef (0) = 0 ou λ= ni, com n ∈ Z.
(6.7) Exercício. Dados n, m ∈ Z, mostrem que as funções enix e emix são ortogonais (esta-mos a usar qualquer intervalo de comprimento 2π, por exemplo, [0,2π]) desde que n 6= m.Qual a norma de enix?
(6.8) Exercício. Se f e g são funções C∞ de período 2π (continuamos a usar o intervalo[0,2π]), mostrem que:
(a) f (2π) = f (0) e g(2π) = g(0);
(b) ddx
g(x) = ddx
g(x) (não é a derivada complexa, pois a variável não é complexa);
(c) ⟨ f , D2 g⟩= ⟨D2 f , g⟩ (onde D representa ddx
);
(d) −⟨ f , D2 f ⟩ ≥ 0.
(6.9) Exercício. Mostrem que enix (com n ∈ Z) é um vetor próprio de D2. Qual o valorpróprio?
(6.10) Exercício. Fixem n, m ∈ Z com n 6= m. Tendo em conta que enix é ortogonal a emix ,mostrem que cos(nx) e sin(nx) são ortogonais a cos(mx) e a sin(mx). (Continuamos atrabalhar no intervalo [0, 2π].)
(6.11) Exercício. Fixem um inteiro n> 0. Usando exponenciais complexas ou outra técnicaque prefiram, mostrem que cos(nx) é ortogonal a sin(nx). Determinem a norma de am-bas as funções. Mostrem ainda que ambas são ortogonais à função constante igual a 1, edeterminem a norma desta última função. (Continuamos a trabalhar em [0,2π].)
(6.12) SÉRIES DE FOURIER. Em termos práticos, a conclusão de tudo isto é que vamos usaruma base ortogonal com as funções 1, cos(nx) e sin(nx) (usando todos os inteiros n > 0).Nesse caso, uma função f de período 2π pode ser escrita como combinação linear dessasfunções:
f (x) = a0+∑
n>0
an cos(nx) +∑
n>0
bn sin(nx).
76/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 6: AS SÉRIES DE FOURIER
A uma tal soma chamamos série de Fourier para f . (Notem que isto pode não ser bem umaigualdade; vamos esclarecer este ponto um pouco mais à frente.)
E quem são os coeficientes da série de Fourier? Como as diferentes funções da base sãoortogonais entre si, vamos ter:
⟨ f , 1⟩= ⟨a0, 1⟩, ⟨ f , cos(nx)⟩= ⟨an cos(nx), cos(nx)⟩, ⟨ f , sin(nx)⟩= ⟨bn sin(nx), sin(nx)⟩
(verifiquem!), o que nos leva a (aqui, n> 0)
a0 =⟨ f , 1⟩‖1‖2 , an =
⟨ f , cos(nx)⟩‖cos(nx)‖2 , bn =
⟨ f , sin(nx)⟩‖sin(nx)‖2
(concordam?).No caso de um intervalo mais geral, da forma [A, B] e com comprimento ` = B − A,
podemos usar as mudanças de variável x = A+ `2π
u e u = 2π`(x − A) = 2π
`x − 2πA
`para
converter entre u ∈ [0,2π] e x ∈ [A, B]. Nesse caso, os limites de integração devem serajustados (passar de 0 a 2π para de A a B). Podemos então usar uma base ortogonal comas funções 1, cos(nu) = cos(2πnx
`− 2πnA
`) e sin(nu) = sin(2πnx
`− 2πnA
`) (tal como antes,
usando todos os inteiros n > 0). Porém, isto é desnecessariamente complicado; podemosperfeitamente eliminar os 2πnA
`obtendo uma base ligeiramente diferente: 1, cos(2πnx
`) e
sin(2πnx`). Para cada n, as novas funções são combinação linear das antigas e vice-versa
(conseguem ver porquê?), mas a nova versão é mais prática.Assim, dada uma função de período ` (usando o intervalo [A, B] de comprimento ` =
B− A), escrevemos
f (x) = a0+∑
n>0
an cos 2πnx`+∑
n>0
bn sin 2πnx`
e temos, como antes (e ainda com n> 0),
a0 =⟨ f , 1⟩‖1‖2 , an =
⟨ f , cos 2πnx`⟩
‖cos 2πnx`‖2 , bn =
⟨ f , sin 2πnx`⟩
‖sin 2πnx`‖2 .
Ou, tendo em conta, como vimos em (6.11), que ‖1‖2 = ` e ‖cos 2πnx`‖2 = ‖sin 2πnx
`‖2 = `
2,
a0 =1`⟨ f , 1⟩, an =
2`⟨ f , cos 2πnx
`⟩, bn =
2`⟨ f , sin 2πnx
`⟩.
Neste ponto, vale a pena fazer um aviso: alguns autores usam uma convenção ligeira-mente diferente, em que a0 tem a mesma fórmula que an (n > 0), e na série de Fourier def usam a0
2em vez de a0. Com qualquer das convenções, o resultado final é
f (x) = 1`⟨ f , 1⟩+
∑
n>0
2`⟨ f , cos 2πnx
`⟩ cos 2πnx
`+∑
n>0
2`⟨ f , sin 2πnx
`⟩ sin 2πnx
`.
(De novo: isto não é bem uma igualdade e vamos esclarecer os detalhes mais à frente.)
(6.13) Vejamos um exemplo. Vamos considerar a função f de período 1 definida no inter-valo ]0,1[ por f (x) = x . (Qual é a sua definição no intervalo ]1, 2[? E no intervalo ]0, 2[?Não dissemos qual o valor em x = 1. Faz diferença?)
77/99
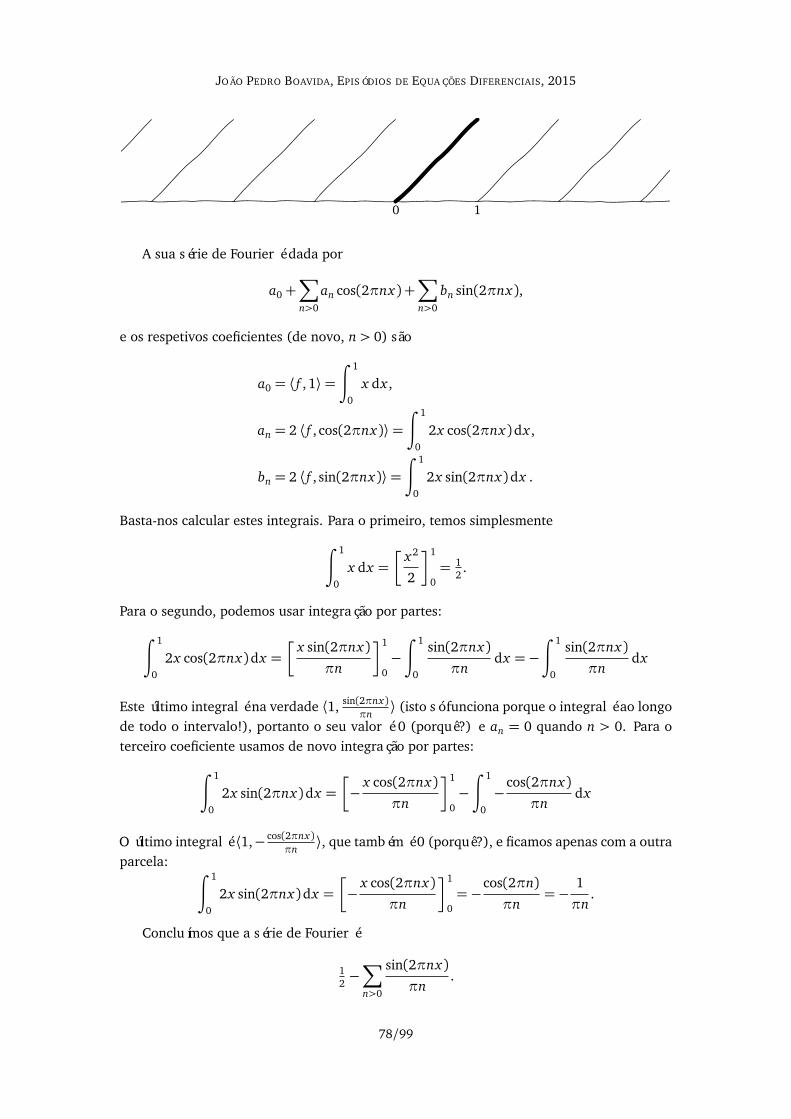
JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
0 1
A sua série de Fourier é dada por
a0+∑
n>0
an cos(2πnx) +∑
n>0
bn sin(2πnx),
e os respetivos coeficientes (de novo, n> 0) são
a0 = ⟨ f , 1⟩=∫ 1
0
x dx ,
an = 2 ⟨ f , cos(2πnx)⟩=∫ 1
0
2x cos(2πnx)dx ,
bn = 2 ⟨ f , sin(2πnx)⟩=∫ 1
0
2x sin(2πnx)dx .
Basta-nos calcular estes integrais. Para o primeiro, temos simplesmente
∫ 1
0
x dx =
x2
2
1
0= 1
2.
Para o segundo, podemos usar integração por partes:
∫ 1
0
2x cos(2πnx)dx =
x sin(2πnx)πn
1
0−∫ 1
0
sin(2πnx)πn
dx =−∫ 1
0
sin(2πnx)πn
dx
Este último integral é na verdade ⟨1, sin(2πnx)πn
⟩ (isto só funciona porque o integral é ao longode todo o intervalo!), portanto o seu valor é 0 (porquê?) e an = 0 quando n > 0. Para oterceiro coeficiente usamos de novo integração por partes:
∫ 1
0
2x sin(2πnx)dx =
− x cos(2πnx)πn
1
0−∫ 1
0
−cos(2πnx)πn
dx
O último integral é ⟨1,− cos(2πnx)πn
⟩, que também é 0 (porquê?), e ficamos apenas com a outraparcela:
∫ 1
0
2x sin(2πnx)dx =
− x cos(2πnx)πn
1
0=−cos(2πn)
πn=− 1
πn.
Concluímos que a série de Fourier é
12−∑
n>0
sin(2πnx)πn
.
78/99
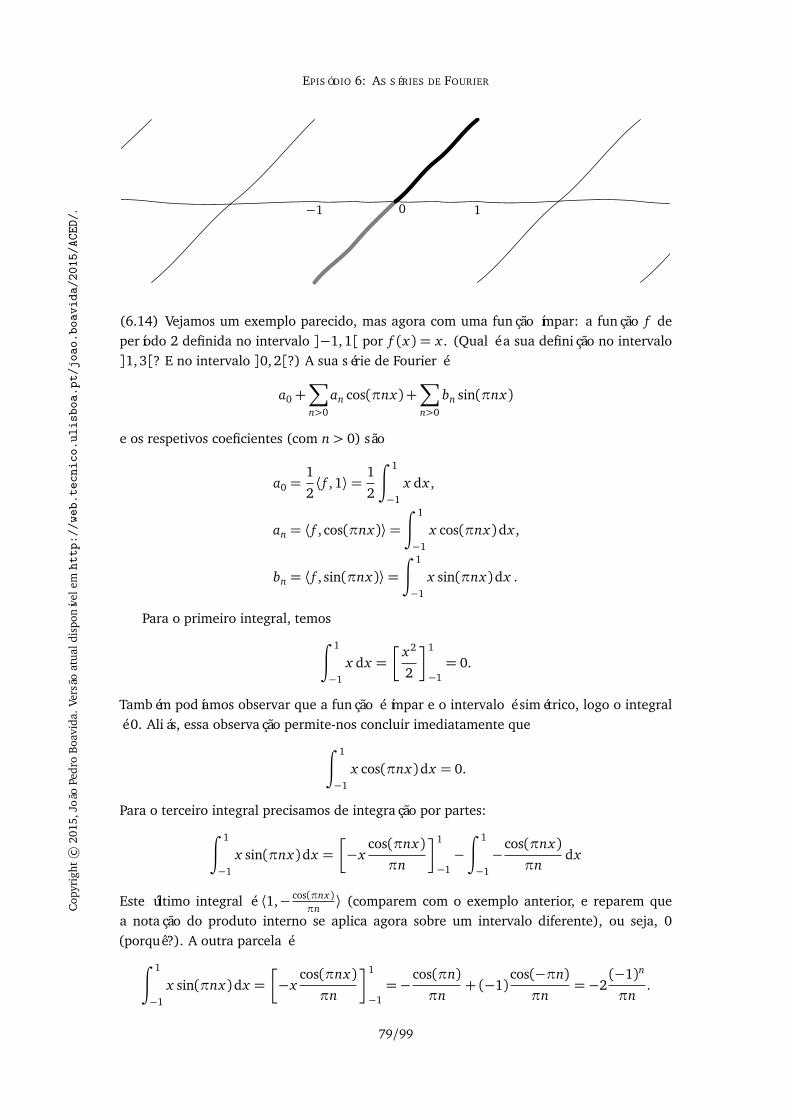
Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 6: AS SÉRIES DE FOURIER
0−1 1
(6.14) Vejamos um exemplo parecido, mas agora com uma função ímpar: a função f deperíodo 2 definida no intervalo ]−1,1[ por f (x) = x . (Qual é a sua definição no intervalo]1,3[? E no intervalo ]0, 2[?) A sua série de Fourier é
a0+∑
n>0
an cos(πnx) +∑
n>0
bn sin(πnx)
e os respetivos coeficientes (com n> 0) são
a0 =1
2⟨ f , 1⟩= 1
2
∫ 1
−1
x dx ,
an = ⟨ f , cos(πnx)⟩=∫ 1
−1
x cos(πnx)dx ,
bn = ⟨ f , sin(πnx)⟩=∫ 1
−1
x sin(πnx)dx .
Para o primeiro integral, temos
∫ 1
−1
x dx =
x2
2
1
−1= 0.
Também podíamos observar que a função é ímpar e o intervalo é simétrico, logo o integralé 0. Aliás, essa observação permite-nos concluir imediatamente que
∫ 1
−1
x cos(πnx)dx = 0.
Para o terceiro integral precisamos de integração por partes:
∫ 1
−1
x sin(πnx)dx =
−xcos(πnx)πn
1
−1−∫ 1
−1
−cos(πnx)πn
dx
Este último integral é ⟨1,− cos(πnx)πn
⟩ (comparem com o exemplo anterior, e reparem quea notação do produto interno se aplica agora sobre um intervalo diferente), ou seja, 0(porquê?). A outra parcela é
∫ 1
−1
x sin(πnx)dx =
−xcos(πnx)πn
1
−1=−cos(πn)
πn+ (−1)
cos(−πn)πn
=−2(−1)n
πn.
79/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
A nossa série de Fourier fica portanto
∑
n>0
−2(−1)n
πnsin(πnx).
(6.15) Exercício. Seja f uma função ímpar de período 2`. Mostrem que os coeficientes a0 ean (com n > 0) da sua série de Fourier obtida a partir do intervalo [−`,`] são todos nulos.Mostrem ainda que os coeficientes bn podem ser calculados usando
bn =2`
∫ `
0
f (x) sin 2πnx2`
dx ,
ou seja, usando a base relevante para o intervalo [−`,`], mas calculando os produtos in-ternos (tanto o integral no numerador, como o que dá origem ao denominador) como se ointervalo fosse [0,`].
(6.16) Exercício. Seja f uma função par de período 2`. Mostrem que os coeficientes bn
(com n > 0) da sua série de Fourier obtida a partir do intervalo [−`,`] são todos nulos.Mostrem ainda que a0 e an (com n> 0) são
a0 =1`
∫ `
0
f (x)dx , an =2`
∫ `
0
f (x) cos 2πnx2`
dx .
(6.17) SÉRIES DE SENOS. Por vezes é útil ter uma série exclusivamente com senos para al-guma função f . No exercício (6.15) vimos que se f for impar, a sua série de Fourier temapenas senos (ou seja, os coeficientes associados aos cossenos são nulos). Isso mesmo foiilustrado no exemplo (6.14). E como os senos são funções ímpares, a soma de uma sériesó com senos também é uma função ímpar. Mas às vezes precisamos de algo que parececontraditório: uma série só com senos mesmo quando f não é ímpar.
Comparem os exemplos (6.13) e (6.14). No primeiro caso, a função não era ímpar,calculámos a série de Fourier em relação ao intervalo [0, 1], e a série não tinha só senos.No segundo caso, a função era ímpar, calculámos a série em relação ao intervalo [−1, 1],e a série tinha só senos. Naturalmente obtivemos séries diferentes, mas reparem que nointervalo [0, 1] representam a mesma função (comparem os gráficos).
Dessa forma contornamos a aparente contradição: quando precisarmos de ter uma sériesó com senos, também só precisaremos que ela corresponda à função num intervalo daforma [0,`]. Portanto, podemos fazer um prolongamento ímpar da função ao intervalo[−`,`] e calcular a série de Fourier (para uma função de período 2`) em relação ao novointervalo, [−`,`]. De acordo com o exercício (6.15), essa série tem apenas senos; daíchamarmos-lhe uma série de senos.
(6.18) Exercício. Calculem as séries de senos destas funções:(a) f : ]0,π[→ R : x 7→ sin x;(b) f : ]0,π[→ R : x 7→ sin(2x);
80/99
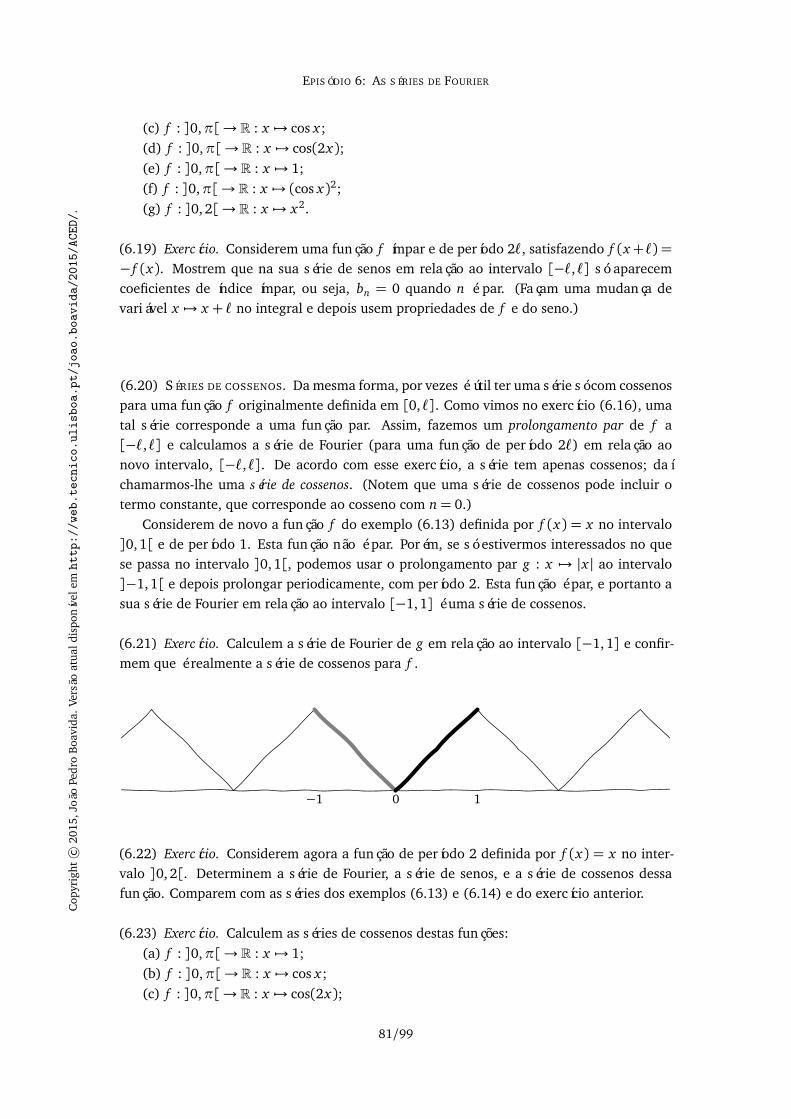
Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 6: AS SÉRIES DE FOURIER
(c) f : ]0,π[→ R : x 7→ cos x;(d) f : ]0,π[→ R : x 7→ cos(2x);(e) f : ]0,π[→ R : x 7→ 1;(f) f : ]0,π[→ R : x 7→ (cos x)2;(g) f : ]0,2[→ R : x 7→ x2.
(6.19) Exercício. Considerem uma função f ímpar e de período 2`, satisfazendo f (x+`) =− f (x). Mostrem que na sua série de senos em relação ao intervalo [−`,`] só aparecemcoeficientes de índice ímpar, ou seja, bn = 0 quando n é par. (Façam uma mudança devariável x 7→ x + ` no integral e depois usem propriedades de f e do seno.)
(6.20) SÉRIES DE COSSENOS. Da mesma forma, por vezes é útil ter uma série só com cossenospara uma função f originalmente definida em [0,`]. Como vimos no exercício (6.16), umatal série corresponde a uma função par. Assim, fazemos um prolongamento par de f a[−`,`] e calculamos a série de Fourier (para uma função de período 2`) em relação aonovo intervalo, [−`,`]. De acordo com esse exercício, a série tem apenas cossenos; daíchamarmos-lhe uma série de cossenos. (Notem que uma série de cossenos pode incluir otermo constante, que corresponde ao cosseno com n= 0.)
Considerem de novo a função f do exemplo (6.13) definida por f (x) = x no intervalo]0,1[ e de período 1. Esta função não é par. Porém, se só estivermos interessados no quese passa no intervalo ]0,1[, podemos usar o prolongamento par g : x 7→ |x | ao intervalo]−1,1[ e depois prolongar periodicamente, com período 2. Esta função é par, e portanto asua série de Fourier em relação ao intervalo [−1, 1] é uma série de cossenos.
(6.21) Exercício. Calculem a série de Fourier de g em relação ao intervalo [−1,1] e confir-mem que é realmente a série de cossenos para f .
0−1 1
(6.22) Exercício. Considerem agora a função de período 2 definida por f (x) = x no inter-valo ]0,2[. Determinem a série de Fourier, a série de senos, e a série de cossenos dessafunção. Comparem com as séries dos exemplos (6.13) e (6.14) e do exercício anterior.
(6.23) Exercício. Calculem as séries de cossenos destas funções:(a) f : ]0,π[→ R : x 7→ 1;(b) f : ]0,π[→ R : x 7→ cos x;(c) f : ]0,π[→ R : x 7→ cos(2x);
81/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(d) f : ]0,π[→ R : x 7→ (cos x)2;(e) f : ]0,π[→ R : x 7→ (sin x)2;(f) f : ]0,π[→ R : x 7→ cos(3x).
(6.24) Exercício. Considerem uma função f par e de período 2`, satisfazendo f (x + `) =− f (x). Mostrem que na sua série de cossenos em relação ao intervalo [−`,`] só aparecemcoeficientes de índice ímpar (atenção: ímpar!), ou seja, an = 0 quando n é par.
(6.25) VALOR DE UMA SÉRIE DE FOURIER NUM PONTO. Uma pergunta natural é: a funçãoobtida a partir da série de Fourier coincide com a função original f ?
Se f for C∞, sim (mas não vamos tentar demonstrá-lo). De contrário, é preciso algumasprecauções. Para as funções que temos usado (limitadas, periódicas, seccionalmente C∞)e nos pontos onde f é contínua, a soma da série coincide com o valor de f . O valor dasérie num ponto de descontinuidade de f é a média dos limites (à esquerda e à direita) def nesse ponto. (É tradicional exigir apenas que a função seja seccionalmente C1, mas nosexemplos que vamos explorar isso não acrescenta nada.)
Ilustramos com a função f do exemplo (6.14): uma função de período 2, definida em]−1,1[ por f (x) = x , e com série de Fourier
∑
n>0
−2(−1)n
πnsin(πnx).
Em pontos no interior do intervalo [−1,1], a função original é C∞, por isso a somacoincide com o valor da função. Por exemplo, em x = 1
2, ficamos com
f (12) = 1
2=∑
n>0
−2(−1)n
πnsin(πn1
2).
Se n for par, o seno é 0. Se n for ímpar, temos n= 2k+ 1 (com k ≥ 0), e então
12=∑
k≥0
−2(−1)2k+1
π (2k+ 1)sin(π2k+1
2) =∑
k≥0
2
π (2k+ 1)sin(kπ+ π
2) =∑
k≥0
2
π (2k+ 1)(−1)k.
Desta forma, multiplicando tudo por π2
, obtemos
π4=∑
k≥0
(−1)k
2k+ 1.
(6.26) Para perceber o que se passa num ponto de descontinuidade, voltemos ao exemplo(6.13): uma função f de período 1 definida em ]0,1[ por f (x) = x , e com série de Fourier
12−∑
n>0
sin(2πnx)πn
.
Esta função tem descontinuidades nos inteiros (porquê? consultem o gráfico). Como afunção é periódica, basta avaliarmos o que se passa em x = 0 (pois nos outros inteirosserá igual). Reparem agora que o valor da série em x = 0 é a média do limite à esquerdalimx→0− f (x) e do limite à direita limx→0+ f (x).
82/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 6: AS SÉRIES DE FOURIER
(6.27) Exercício?. Mantemos a função f do parágrafo anterior e consideramos uma fun-ção g de período 1, limitada, e seccionalmente C∞. Suponham que limx→0− g(x) = a elimx→0+ g(x) = b, com a 6= b. Definam h : x 7→ g(x) + (b− a) f (x) em x 6∈ Z.
(a) Determinem limx→0− h(x) e limx→0+ h(x), e mostrem que é possível prolongar h ax = 0 por continuidade. Qual o valor em x = 0 da função prolongada?
(b) Qual a soma da série de h(x) em x = 0? Qual a soma da série de (b− a) f (x) emx = 0? Qual é então o valor da soma da série de g(x) em x = 0?
(c) Conseguem generalizar esta conclusão para outros pontos de descontinuidade (alémde x = 0)? E para outros intervalos (além de [0,1])?
(6.28) Exercício. Considerem a função de período 1 definida em ]0,1[ por h(x) = x2.(a) Determinem a série de Fourier de h(x).(b) Substituindo x = 1
2, determinem o valor de
∑∞n=1
(−1)n
n2 .(c) Substituindo x = 1, determinem o valor de
∑∞n=1
1n2 .
(6.29) Exercício. Considerem agora a função de período 1 definida em ]0, 1[ por h(x) = x4.(a) Determinem a série de Fourier de h(x).(b) Substituindo x = 1
2, determinem o valor de
∑∞n=1
(−1)n
n4 .(c) Substituindo x = 1, determinem o valor de
∑∞n=1
1n4 .
(6.30) RESPOSTAS DE EXERCÍCIOS.
(6.7)p
2π.
(6.9) −n2.
(6.11)pπ;pπ;p
2π.
(6.18) (a) sin x . (b) sin(2x).(c)
∑
n>1n par
4n/πn2−1
sin(nx). (d)∑
n>0n ímpar
4n/πn2−4
sin(nx).
(e)∑
n>0n ímpar
4πn
sin(nx). (f)∑
n>0n ímpar
4(n2−2)π(n3−4n)
sin(nx).
(g)∑
n>0− 16+8(π2n2−2) (−1)n
π3n3 sin πnx2
.
(6.21) 12−∑n>0
n ímpar
4π2n2 cos(πnx).
(6.22) 1−∑n>02πn
sin(πnx);
−∑n>04(−1)n
πnsin πnx
2; 1−∑n>0
n ímpar
8π2n2 cos πnx
2.
(6.23) (a) 1. (b) cos x . (c) cos(2x).(d) 1
2+ 1
2cos(2x). (e) 1
2− 1
2cos(2x). (f) cos(3x).
(6.27) (a) b. b. b. (b) b. b−a2
. b+a2
.
(6.28) (a)13+∑
n>01
π2n2 cos(2πnx)−∑n>01πn
sin(2πnx).
(b) −π2
12. (c) π2
6.
(6.29) (a) 15+∑
n>0
2π2n2 − 3
π4n4
cos(2πnx) +∑
n>0
3π3n3 − 1
πn
sin(2πnx). (b) − 7π4
6!. (c) π4
90.
83/99

EPISÓDIO 7
ALGUMAS EDPs
Neste episódio, resolvemos alguns exemplos de equações diferenciais parciais, ou seja, equa-ções que envolvem derivadas parciais.
Começamos com alguns exemplos de equações de primeira ordem. Imaginem que têmuma função u : R2→ R : x , y 7→ u(x , y) e que γ : t 7→ γ(t) é um caminho em R2. Abusandoum pouco a notação, escrevemos γ(t) = (x(t), y(t)). Omitindo t sempre que não haja riscode confusão, temos
ddt
u(γ(t))
=ddt
u(x , y)
=dx
dt· ∂ u
∂ x(x , y) +
dy
dt· ∂ u
∂ y(x , y).
Isto sugere que, se tivermos uma equação
a(x , y) · ∂ u
∂ x(x , y) + b(x , y) · ∂ u
∂ y(x , y) = f (x , y),
procuremos, usando as técnicas do episódio 3, uma solução para
dx
dt= a(x , y),
dy
dt= b(x , y)
e construamos com ela um caminho γ(t) = (x(t), y(t)) (uma curva característica). Substi-tuindo esse caminho na equação, ficamos com
a(x(t), y(t))︸ ︷︷ ︸
dxdt
· ∂ u
∂ x(x(t), y(t)) + b(x(t), y(t))
︸ ︷︷ ︸
dydt
· ∂ u
∂ y(x(t), y(t)) = f (x(t), y(t)),
ou seja, tendo em conta o que vimos acima,
ddt
u(γ(t))
= f (x(t), y(t)).
Esta é uma equação de primeira ordem, apenas na variável t, que podemos resolver comas técnicas do episódio 1. Se conhecermos o valor de u num ponto do caminho, podemosusá-lo como condição inicial e obter os valores de u ao longo de γ, desde que a equaçãotenha uma solução única, e desde que não haja outros caminhos a cruzar-se com este e queindiquem valores diferentes (usamos as ideias do episódio 2 para esclarecer estes detalhes).
Também veremos exemplos de equações de segunda ordem. Para estas, as técnicasdo episódio 6 permitem-nos escrever a função procurada como uma série de senos ou decossenos (conforme os casos), e a partir da EDP obter equações de ordem superior para oscoeficientes da série, equações essas que resolveremos como no episódio 4 ou no 5.
84/99
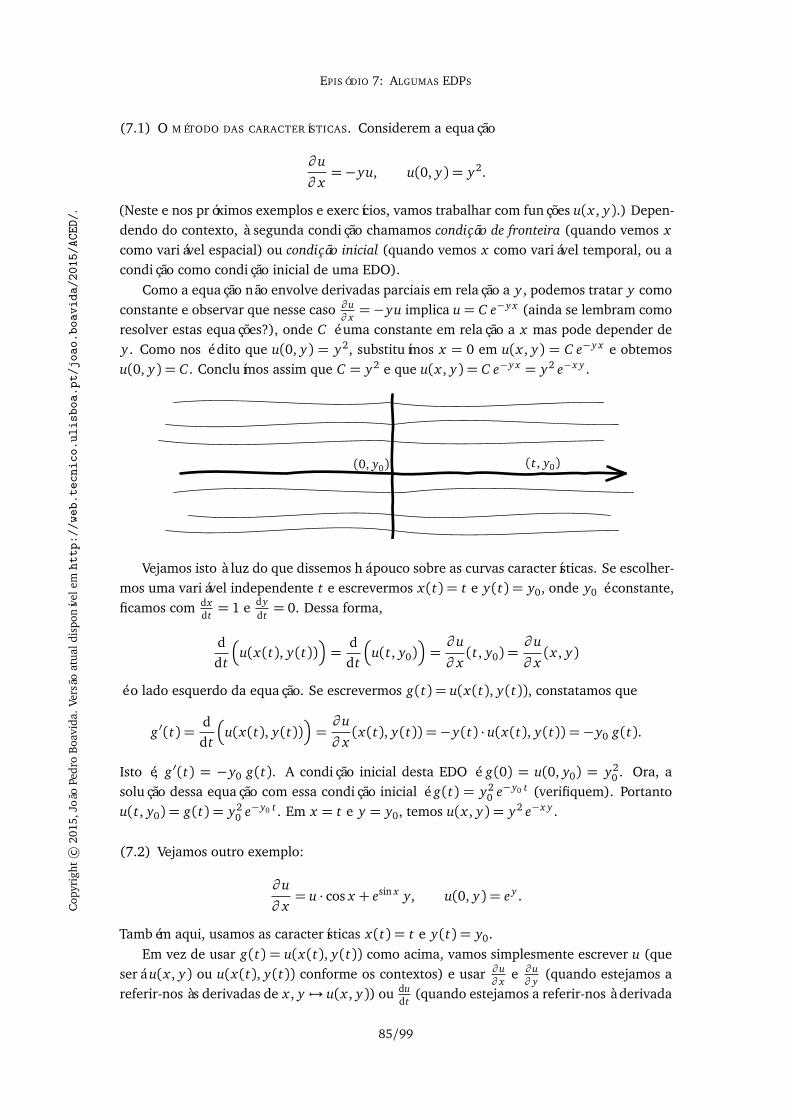
Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 7: ALGUMAS EDPS
(7.1) O MÉTODO DAS CARACTERÍSTICAS. Considerem a equação
∂ u
∂ x=−yu, u(0, y) = y2.
(Neste e nos próximos exemplos e exercícios, vamos trabalhar com funções u(x , y).) Depen-dendo do contexto, à segunda condição chamamos condição de fronteira (quando vemos xcomo variável espacial) ou condição inicial (quando vemos x como variável temporal, ou acondição como condição inicial de uma EDO).
Como a equação não envolve derivadas parciais em relação a y , podemos tratar y comoconstante e observar que nesse caso ∂ u
∂ x=−yu implica u= C e−y x (ainda se lembram como
resolver estas equações?), onde C é uma constante em relação a x mas pode depender dey . Como nos é dito que u(0, y) = y2, substituímos x = 0 em u(x , y) = C e−y x e obtemosu(0, y) = C . Concluímos assim que C = y2 e que u(x , y) = C e−y x = y2 e−x y .
(0, y0) (t, y0)
Vejamos isto à luz do que dissemos há pouco sobre as curvas características. Se escolher-mos uma variável independente t e escrevermos x(t) = t e y(t) = y0, onde y0 é constante,ficamos com dx
dt= 1 e dy
dt= 0. Dessa forma,
ddt
u(x(t), y(t))
=ddt
u(t, y0)
=∂ u
∂ x(t, y0) =
∂ u
∂ x(x , y)
é o lado esquerdo da equação. Se escrevermos g(t) = u(x(t), y(t)), constatamos que
g ′(t) =ddt
u(x(t), y(t))
=∂ u
∂ x(x(t), y(t)) =−y(t) · u(x(t), y(t)) =−y0 g(t).
Isto é, g ′(t) = −y0 g(t). A condição inicial desta EDO é g(0) = u(0, y0) = y20 . Ora, a
solução dessa equação com essa condição inicial é g(t) = y20 e−y0 t (verifiquem). Portanto
u(t, y0) = g(t) = y20 e−y0 t . Em x = t e y = y0, temos u(x , y) = y2 e−x y .
(7.2) Vejamos outro exemplo:
∂ u
∂ x= u · cos x + esin x y, u(0, y) = e y .
Também aqui, usamos as características x(t) = t e y(t) = y0.Em vez de usar g(t) = u(x(t), y(t)) como acima, vamos simplesmente escrever u (que
será u(x , y) ou u(x(t), y(t)) conforme os contextos) e usar ∂ u∂ x
e ∂ u∂ y
(quando estejamos areferir-nos às derivadas de x , y 7→ u(x , y)) ou du
dt(quando estejamos a referir-nos à derivada
85/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
de t 7→ u(x(t), y(t)), ou seja, a g ′(t)). Isto permite-nos aliviar a notação substancialmente,sem trazer riscos sérios de confusão. Temos assim
du
dt=
dx
dt· ∂ u
∂ x+
dy
dt· ∂ u
∂ y=∂ u
∂ x
e portanto, substituindo x = t e y = y0, a equação original é equivalente a
u′ = u · cos t + esin t y0, u(0, y0) = e y0 ,
onde u′ = u′(t) = dudt
e y0 é uma constante. Esta equação é linear e podemos resolvê-la comoem (1.22). Escolhendo µ(t) = e− sin t como fator integrante, obtemos consecutivamente
e− sin t u′− cos t · e− sin t u= y0 ⇒
e− sin t u′ = y0 ⇒ e− sin t u= y0 t + C ,
onde C é uma constante (em relação a t). Desta forma, u= y0 tesin t+Cesin t . Como x(0) =0 e y(0) = y0, se substituirmos t = 0 nessa fórmula obtemos u(0, y0) = C (verifiquem!).Comparando com a condição inicial u(0, y0) = e y0 , concluímos que C = e y0 . Portanto,
u(x(t), y(t)) = u(t, y0) = y0 tesin t + e y0+sin t .
Em x = t e y = y0, temos u(x , y) = x yesin x + e y+sin x .
(7.3) Nada obriga a que a condição inicial seja dada em pontos da forma (0, y0). Vejamoso que se passa com
∂ u
∂ x= 1+ sin(2y), u(−y2, y) =−y2 sin(2y).
Como queremos que dudt= dx
dt· ∂ u∂ x+ dy
dt· ∂ u∂ y
seja ∂ u∂ x
, escolhemos dxdt= 1 e dy
dt= 0. Isto
leva-nos a x(t) = x0+ t e y(t) = y0. A equação original fica
du
dt= 1+ sin(2y0), u(−y2
0 , y0) =−y20 sin(2y0).
Como a condição inicial é dada em pontos da forma (−y20 , y0), vamos escolher (x(0), y(0)) =
(x0, y0) = (−y20 , y0), ou seja, x(t) = t − y2
0 . Desta forma, em t = 0 ficamos com
u(x(0), y(0)) = u(x0, y0) = u(−y20 , y2
0 ) =−y20 sin(2y0).
A solução de dudt= 1+ sin(2y0) é u= t + t sin(2y0) + C , onde C é constante em relação
a t (mas pode depender de y0). Para determinar o valor de C , substituímos t = 0 na
(−y20 , y0) (t − y2
0 , y0)
86/99
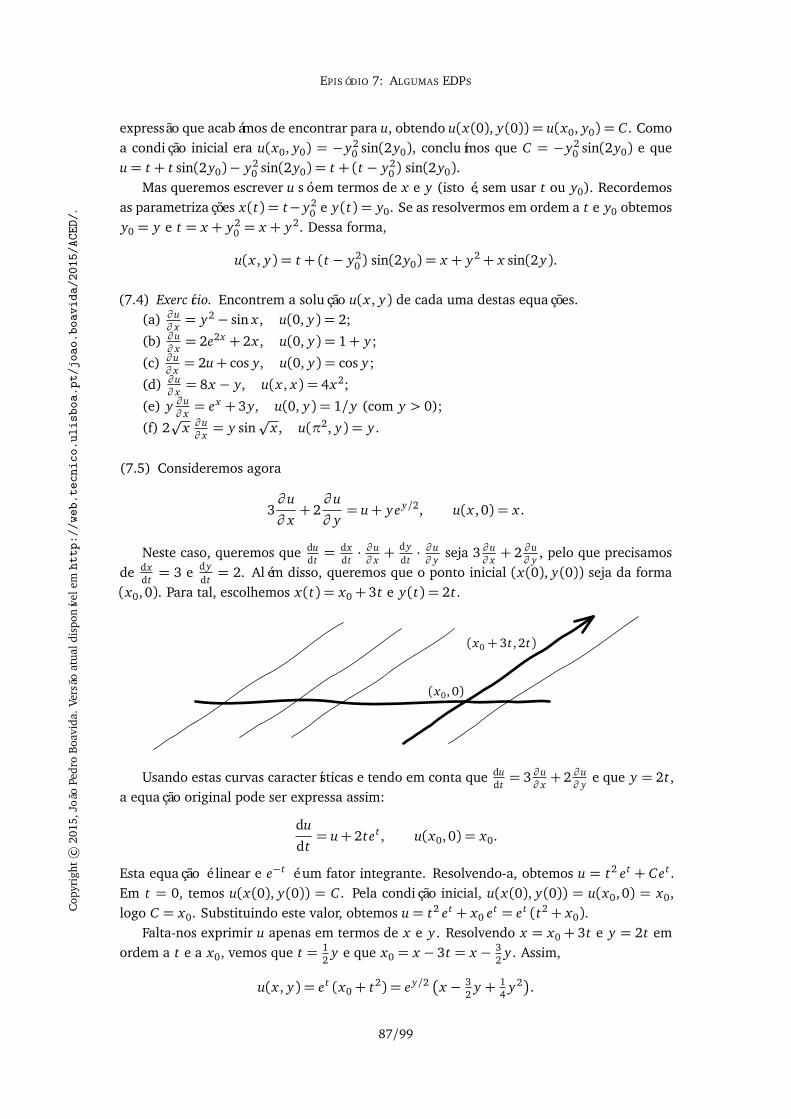
Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 7: ALGUMAS EDPS
expressão que acabámos de encontrar para u, obtendo u(x(0), y(0)) = u(x0, y0) = C . Comoa condição inicial era u(x0, y0) = −y2
0 sin(2y0), concluímos que C = −y20 sin(2y0) e que
u= t + t sin(2y0)− y20 sin(2y0) = t + (t − y2
0 ) sin(2y0).Mas queremos escrever u só em termos de x e y (isto é, sem usar t ou y0). Recordemos
as parametrizações x(t) = t− y20 e y(t) = y0. Se as resolvermos em ordem a t e y0 obtemos
y0 = y e t = x + y20 = x + y2. Dessa forma,
u(x , y) = t + (t − y20 ) sin(2y0) = x + y2+ x sin(2y).
(7.4) Exercício. Encontrem a solução u(x , y) de cada uma destas equações.(a) ∂ u
∂ x= y2− sin x , u(0, y) = 2;
(b) ∂ u∂ x= 2e2x + 2x , u(0, y) = 1+ y;
(c) ∂ u∂ x= 2u+ cos y, u(0, y) = cos y;
(d) ∂ u∂ x= 8x − y, u(x , x) = 4x2;
(e) y ∂ u∂ x= ex + 3y, u(0, y) = 1/y (com y > 0);
(f) 2p
x ∂ u∂ x= y sin
px , u(π2, y) = y .
(7.5) Consideremos agora
3∂ u
∂ x+ 2
∂ u
∂ y= u+ ye y/2, u(x , 0) = x .
Neste caso, queremos que dudt= dx
dt· ∂ u∂ x+ dy
dt· ∂ u∂ y
seja 3 ∂ u∂ x+ 2 ∂ u
∂ y, pelo que precisamos
de dxdt= 3 e dy
dt= 2. Além disso, queremos que o ponto inicial (x(0), y(0)) seja da forma
(x0, 0). Para tal, escolhemos x(t) = x0+ 3t e y(t) = 2t.
(x0, 0)
(x0 + 3t, 2t)
Usando estas curvas características e tendo em conta que dudt= 3 ∂ u
∂ x+2 ∂ u
∂ ye que y = 2t,
a equação original pode ser expressa assim:
du
dt= u+ 2tet , u(x0, 0) = x0.
Esta equação é linear e e−t é um fator integrante. Resolvendo-a, obtemos u = t2 et + Cet .Em t = 0, temos u(x(0), y(0)) = C . Pela condição inicial, u(x(0), y(0)) = u(x0, 0) = x0,logo C = x0. Substituindo este valor, obtemos u= t2 et + x0 et = et (t2+ x0).
Falta-nos exprimir u apenas em termos de x e y . Resolvendo x = x0 + 3t e y = 2t emordem a t e a x0, vemos que t = 1
2y e que x0 = x − 3t = x − 3
2y . Assim,
u(x , y) = et (x0+ t2) = e y/2 x − 32
y + 14
y2.
87/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(7.6) Exercício. Determinem as soluções u(x , y) da equação
3∂ u
∂ x+ 2
∂ u
∂ y= f (x , y, u), u(x , 0) = x ,
onde f é cada uma das seguintes funções:
(a) f (x , y, u) = y; (b) f (x , y, u) = 4u; (c) f (x , y, u) = uy; (d) f (x , y, u) = x−y2.
(7.7) Se as curvas características forem parametrizadas por x(t) = t + x0 e por soluções
y(x) de equações y ′ = F(x , y) em ordem a x , teremos dxdt= 1 e dy
dt= F(x , y). Assim,
du
dt=
dx
dt· ∂ u
∂ x+
dy
dt· ∂ u
∂ y=∂ u
∂ x+ F(x , y) · ∂ u
∂ y.
Por exemplo, para a equação
∂ u
∂ x− 2y
∂ u
∂ y= ex + y + u, u(0, y) = y.
Para as características serem soluções de dxdt= 1 e dy
dt=−2y passando por pontos da forma
(0, y), escolhemos x(t) = t e y(t) = e−2t y0. (De onde vem este y(t)?) Escrevendo t e y0
em ordem a x e y , temos também t = x e y0 = e2t y = e2x y .Já a equação diferencial fica
du
dt= ex + y + u= et + e−2t y0+ u, u(0, y0) = y0.
A equação é linear, e usando o fator integrante e−t obtemos e−t u = t − 13e−3t y0 + C .
Substituindo em t = 0 e usando a condição inicial, obtemos u(0, y0) = −13
y0 + C = y0.Logo, C = 4
3y0. Resolvendo em ordem a u, e depois substituindo as expressões para t e y0
em ordem a x e y , chegamos então a
u= tet − 13e−2t y0+ Cet = tet − 1
3y0 e−2t + 4
3y0 et = xex − 1
3y + 4
3ye3x .
(Veem o que aconteceu nesta última passagem?)
(7.8) Exercício. Encontrem as soluções u(x , y) das seguintes equações.(a) ∂ u
∂ x− 2y ∂ u
∂ y= 2x − 2y, u(0, y) = 1+ 2y;
(b) ∂ u∂ x− 2y ∂ u
∂ y= y − 2x y, u(0, y) = y;
(c) ∂ u∂ x+ x ∂ u
∂ y= y, u(0, y) = 0;
(d) ∂ u∂ x+ x ∂ u
∂ y= x − 2y, u(0, y) = 1;
(e) ∂ u∂ x+ x ∂ u
∂ y= 2ux , u(0, y) = e y ;
(f) ∂ u∂ x+ cos x ∂ u
∂ y= x − cos x , u(0, y) = y;
(g) ∂ u∂ x+ cos x ∂ u
∂ y= 1, u(0, y) = y2;
(h) ∂ u∂ x+ cos x ∂ u
∂ y= u, u(0, y) =−2y;
(i) ∂ u∂ x+ 2x y
1+x2∂ u∂ y= cos x , u(0, y) = cos y .
88/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 7: ALGUMAS EDPS
(7.9) Exercício?. Vamos identificar condições nas quais a equação
∂ u
∂ x+ F(x , y) · ∂ u
∂ y= f (x , y, u)
(com alguma condição inicial) tem solução única u : Ω → R : x , y 7→ u(x , y), onde Ω éum aberto conexo por arcos. (Não vamos tentar determinar se a função u assim obtida édiferenciável.) Em cada alínea, mantemos as hipóteses das alíneas anteriores.
(a) Suponham que F é contínua em Ω e localmente Lipschitz em relação a y . Mostremque, para cada (x0, y0) ∈ Ω, há exatamente uma solução de
(
x ′(t) = 1,
y ′(t) = F(x(t), y(t)),
(
x(0) = x0,
y(0) = y0,
com todos os seus pontos em Ω e que não pode ser prolongada para um intervalo maiorsem sair de Ω.
(b) Mostrem que se duas curvas como as das alínea anterior (mas com pontos iniciaisdistintos) se intersetam, então são a mesma curva (mas com uma parametrização diferente).
(c) Suponham que f é contínua, e localmente Lipschitz em relação a u. Dada uma curva(x(t), y(t)) como na alínea (a), mostrem que a equação correspondente
du
dt= f (x(t), y(t), u)
tem uma única solução para cada valor inicial u(x0, y0).(d) Queremos especificar condições de fronteira ao longo de um curva em Ω. O que é
preciso exigir dessa curva para garantir que as curvas características não se intersetam?(e) O que é preciso exigir do conjunto Ω para garantir que cada ponto de Ω está nalguma
curva característica? Nessas condições, como obter o valor de u em cada ponto de Ω?
(7.10) Também podemos ter situações em que nenhum dos coeficientes é constante. Veja-mos o que se passa com
(x + y)∂ u
∂ x+ y
∂ u
∂ y= x + 2x y + 3y2, u(x , 1) = 2x .
Como queremos que dudt= dx
dt· ∂ u∂ x+ dy
dt· ∂ u∂ y= (x+ y) ∂ u
∂ x+ y ∂ u
∂ ye que cada característica
passe por um ponto da forma (x0, 1), procuramos soluções de(
x ′ = x + y,
y ′ = y,
(
x(0) = x0,
y(0) = 1.
Escrevendo na forma matricial, como fizemos no episódio 3, temos
xy
′=
1 10 1
xy
,
x(0)y(0)
=
x0
1
,
cuja solução (usando a exponencial da forma de Jordan) é
x(t)y(t)
=
et tet
0 et
x0
1
=
et x0+ tet
et
.
89/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
Tendo em conta que dudt= (x + y) ∂ u
∂ x+ y ∂ u
∂ y, a equação original fica agora
du
dt= (et x0+ tet) + 2(et x0+ tet) et + 3e2t , u(x0, 1) = 2x0.
Integrando por partes, obtemos u = et x0 + tet − et + e2t x0 + te2t + e2t + C . Substituindot = 0 e usando a condição inicial u(x0, 1) = 2x0, obtemos ainda 2x0 = 2x0 + C , ou seja,C = 0. Concluímos assim que u = et x0 + tet − et + e2t x0 + te2t + e2t = x − y + x y + y2
(de onde vem a última igualdade?).
(7.11) Exercício. Considerem
x∂ u
∂ x+ y
∂ u
∂ y= u, u(x ,−1) = x .
(a) Determinem a parametrização da curva característica com x(0) = x0 e y(0) = −1.Qual o maior intervalo onde a parametrização está definida?
(b) Que pontos estão em alguma dessas curvas? As curvas intersetam-se?(c) Determinem u no maior conjunto possível.
(7.12) Exercício. Considerem agora
−y∂ u
∂ x+ x
∂ u
∂ y= f (x , y)
com condição inicial u(x , 0) = 0 válida em x > 0.(a) Determinem a parametrização da curva característica com x(0) = x0 e y(0) = 0,
para x0 > 0. Qual o maior intervalo onde a parametrização está definida?(b) Supondo que f (x , y) = x2− y2, determinem u em R2 \ (0, 0).(c) Supondo agora que f (x , y) = 1, determinem u em R2 \ (x , 0) : x ≤ 0. É possível
estender u a mais pontos?
(7.13) A EQUAÇÃO DE CONTINUIDADE. Dizer que uma certa quantidade é conservada, é dizerque, para cada região V ,
ddt
∫∫∫
V
densidade=−∫∫
∂ V
fluxo através da fronteira
(∂ V é o bordo de V ). Se chamarmos ρ à densidade (da quantidade em causa), e usarmosa regra de Leibniz (para trocar a derivada para dentro do integral), o lado esquerdo dessaequação fica
ddt
∫∫∫
V
densidade=ddt
∫∫∫
V
ρ =
∫∫∫
V
∂ ρ
∂ t.
Se chamarmos F ao vetor que descreve a direcção de movimento (e quantidade de materialmovimentado) em cada ponto, e N ao vetor normal a ∂ V apontando para fora da região, edepois usarmos o teorema da divergência, o lado direito da fórmula inicial fica
−∫∫
∂ V
fluxo através da fronteira=−∫∫
∂ V
F •N=−∫∫∫
V
divF.
90/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 7: ALGUMAS EDPS
Ora, se duas funções contínuas têm sempre os mesmos integrais, independentemente daregião de integração V , é porque são necessariamente iguais. Obtemos portanto a chamadaequação de continuidade:
∂ ρ
∂ t=−divF.
(Notem que aqui estamos a usar a divergência de forma ligeiramente diferente do habitual,incluindo apenas derivadas em relação às variáveis espaciais.)
(7.14) A EQUAÇÃO DO CALOR pode ser obtida a partir da equação de continuidade, se acei-tarmos algumas hipóteses (com cuja justificação—e condições de validade—não nos vamospreocupar). O nosso objetivo é encontrar uma equação diferencial para a temperaturau(t, x , y, z) em cada ponto (x , y, z) de um objeto e em cada instante t. A equação, é claro,só se aplicará no interior do objeto; teremos de especificar (de alguma outra forma) o quese passa na fronteira do objeto.
Como a energia é conservada, usamos a correspondente equação da continuidade. Paraisso, assumimos que a densidade de energia (térmica) em cada ponto é proporcional àtemperatura (absoluta) nesse ponto (ou seja, ρ = au, para alguma constante a > 0) eque o fluxo de energia é proporcional ao gradiente da temperatura, mas no sentido oposto(ou seja, F = −b grad u, para alguma constante b > 0). Combinando tudo, a equação dacontinuidade fica
a∂ u
∂ t= b divgrad u= b
∂ 2u
∂ x2 +∂ 2u
∂ y2 +∂ 2u
∂ z2
.
Para nós, os valores de a e b são irrelevantes, e por isso combinamo-los no mesmo lado daequação. Vamos considerar apenas o caso unidimensional. (Como usamos apenas derivadas,não precisamos que u seja a temperatura absoluta.) Obtemos portanto
∂ u
∂ t= c∂ 2u
∂ x2 .
Mas como resolvemos uma equação deste género?
(7.15) RESOLUÇÃO DE EDPS USANDO SÉRIES DE FOURIER. Queremos encontrar a função u(t, x)com domínio t ≥ 0 e 0≤ x ≤ π
3satisfazendo
∂ u
∂ t= 4
∂ 2u
∂ x2 − 17u, u(t, 0) = u(t, π3) = 0, u(0, x) = 4sin(3x)− 7 sin(6x).
(Às condições no centro chamamos as condições de fronteira, à última condição chamamosa condição inicial. Para evitar ter de definir as derivadas parciais na fronteira, trabalhamosapenas com funções definidas numa vizinhança do domínio.)
Vamos usar a seguinte estratégia: fixando o valor de t, queremos que a função f (x) =u(t, x) satisfaça f (0) = u(t, 0) = 0 e f (π
3) = u(t, π
3) = 0. Como vamos precisar de calcular
a derivada d fdx= ∂ u
∂ x, convém que f seja diferenciável (sem saltos nem cantos). Podemos
começar por fazer um prolongamento ímpar de f ao intervalo [−π3
, π3] (como f (0) = 0,
isto assegura que f seja diferenciável em x = 0). Se fizermos um prolongamento periódico
91/99
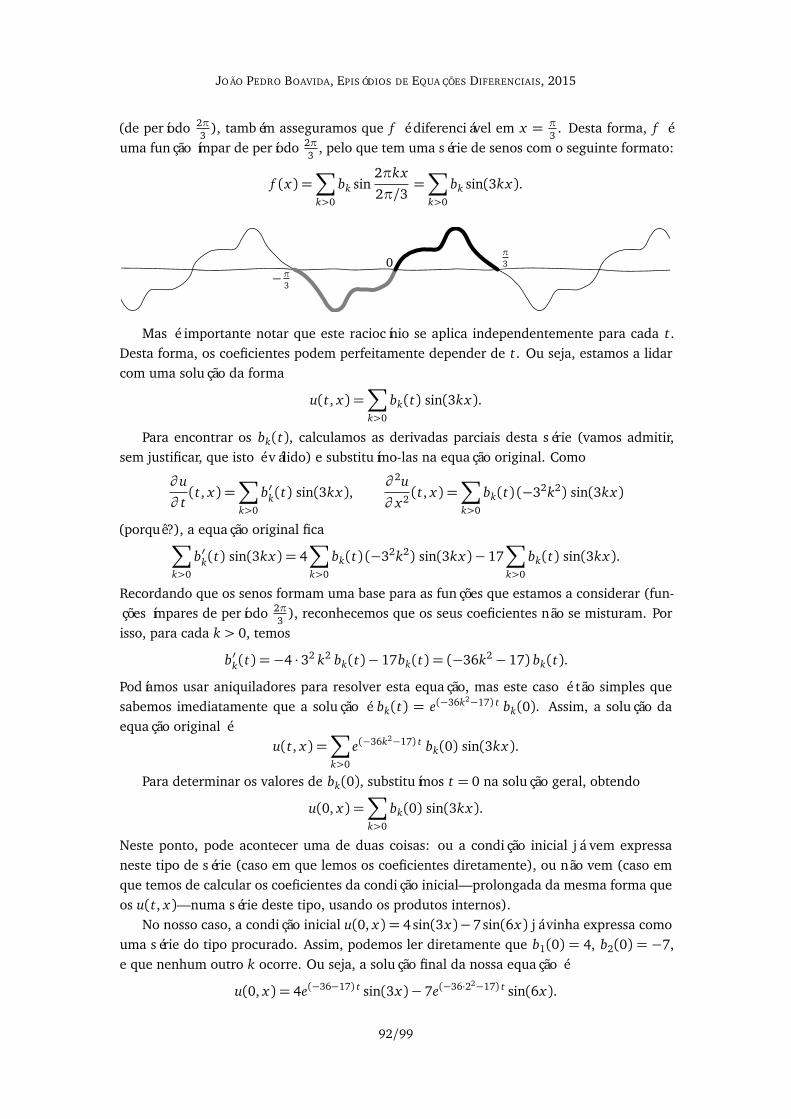
JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(de período 2π3
), também asseguramos que f é diferenciável em x = π3
. Desta forma, f éuma função ímpar de período 2π
3, pelo que tem uma série de senos com o seguinte formato:
f (x) =∑
k>0
bk sin2πkx
2π/3=∑
k>0
bk sin(3kx).
0π
3
−π3
Mas é importante notar que este raciocínio se aplica independentemente para cada t.Desta forma, os coeficientes podem perfeitamente depender de t. Ou seja, estamos a lidarcom uma solução da forma
u(t, x) =∑
k>0
bk(t) sin(3kx).
Para encontrar os bk(t), calculamos as derivadas parciais desta série (vamos admitir,sem justificar, que isto é válido) e substituímo-las na equação original. Como
∂ u
∂ t(t, x) =
∑
k>0
b′k(t) sin(3kx),∂ 2u
∂ x2 (t, x) =∑
k>0
bk(t) (−32k2) sin(3kx)
(porquê?), a equação original fica∑
k>0
b′k(t) sin(3kx) = 4∑
k>0
bk(t) (−32k2) sin(3kx)− 17∑
k>0
bk(t) sin(3kx).
Recordando que os senos formam uma base para as funções que estamos a considerar (fun-ções ímpares de período 2π
3), reconhecemos que os seus coeficientes não se misturam. Por
isso, para cada k > 0, temos
b′k(t) =−4 · 32 k2 bk(t)− 17bk(t) = (−36k2− 17) bk(t).
Podíamos usar aniquiladores para resolver esta equação, mas este caso é tão simples quesabemos imediatamente que a solução é bk(t) = e(−36k2−17) t bk(0). Assim, a solução daequação original é
u(t, x) =∑
k>0
e(−36k2−17) t bk(0) sin(3kx).
Para determinar os valores de bk(0), substituímos t = 0 na solução geral, obtendo
u(0, x) =∑
k>0
bk(0) sin(3kx).
Neste ponto, pode acontecer uma de duas coisas: ou a condição inicial já vem expressaneste tipo de série (caso em que lemos os coeficientes diretamente), ou não vem (caso emque temos de calcular os coeficientes da condição inicial—prolongada da mesma forma queos u(t, x)—numa série deste tipo, usando os produtos internos).
No nosso caso, a condição inicial u(0, x) = 4sin(3x)−7sin(6x) já vinha expressa comouma série do tipo procurado. Assim, podemos ler diretamente que b1(0) = 4, b2(0) = −7,e que nenhum outro k ocorre. Ou seja, a solução final da nossa equação é
u(0, x) = 4e(−36−17) t sin(3x)− 7e(−36·22−17) t sin(6x).
92/99
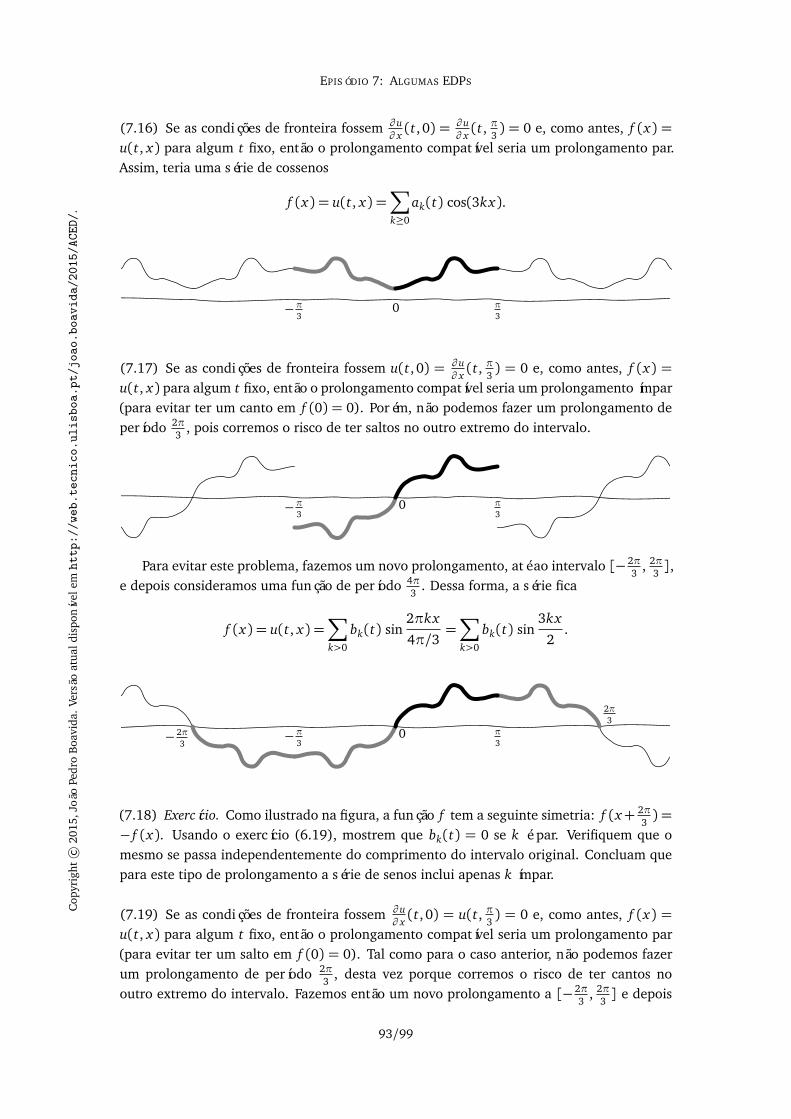
Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 7: ALGUMAS EDPS
(7.16) Se as condições de fronteira fossem ∂ u∂ x(t, 0) = ∂ u
∂ x(t, π
3) = 0 e, como antes, f (x) =
u(t, x) para algum t fixo, então o prolongamento compatível seria um prolongamento par.Assim, teria uma série de cossenos
f (x) = u(t, x) =∑
k≥0
ak(t) cos(3kx).
0 π
3−π
3
(7.17) Se as condições de fronteira fossem u(t, 0) = ∂ u∂ x(t, π
3) = 0 e, como antes, f (x) =
u(t, x) para algum t fixo, então o prolongamento compatível seria um prolongamento ímpar(para evitar ter um canto em f (0) = 0). Porém, não podemos fazer um prolongamento deperíodo 2π
3, pois corremos o risco de ter saltos no outro extremo do intervalo.
0 π
3−π
3
Para evitar este problema, fazemos um novo prolongamento, até ao intervalo [−2π3
, 2π3],
e depois consideramos uma função de período 4π3
. Dessa forma, a série fica
f (x) = u(t, x) =∑
k>0
bk(t) sin2πkx
4π/3=∑
k>0
bk(t) sin3kx
2.
0 π
3−π
3
2π3
− 2π3
(7.18) Exercício. Como ilustrado na figura, a função f tem a seguinte simetria: f (x+ 2π3) =
− f (x). Usando o exercício (6.19), mostrem que bk(t) = 0 se k é par. Verifiquem que omesmo se passa independentemente do comprimento do intervalo original. Concluam quepara este tipo de prolongamento a série de senos inclui apenas k ímpar.
(7.19) Se as condições de fronteira fossem ∂ u∂ x(t, 0) = u(t, π
3) = 0 e, como antes, f (x) =
u(t, x) para algum t fixo, então o prolongamento compatível seria um prolongamento par(para evitar ter um salto em f (0) = 0). Tal como para o caso anterior, não podemos fazerum prolongamento de período 2π
3, desta vez porque corremos o risco de ter cantos no
outro extremo do intervalo. Fazemos então um novo prolongamento a [−2π3
, 2π3] e depois
93/99
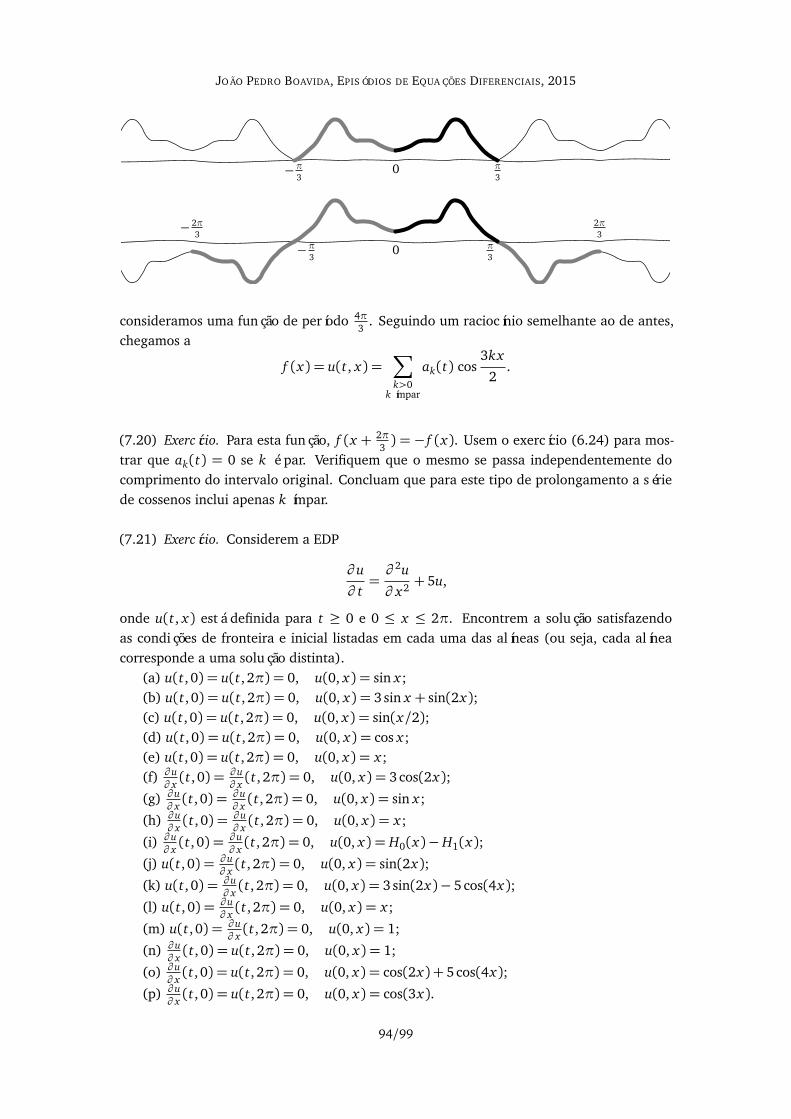
JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
0 π
3−π
3
0 π
3−π
3
2π3
− 2π3
consideramos uma função de período 4π3
. Seguindo um raciocínio semelhante ao de antes,chegamos a
f (x) = u(t, x) =∑
k>0k ímpar
ak(t) cos3kx
2.
(7.20) Exercício. Para esta função, f (x + 2π3) = − f (x). Usem o exercício (6.24) para mos-
trar que ak(t) = 0 se k é par. Verifiquem que o mesmo se passa independentemente docomprimento do intervalo original. Concluam que para este tipo de prolongamento a sériede cossenos inclui apenas k ímpar.
(7.21) Exercício. Considerem a EDP
∂ u
∂ t=∂ 2u
∂ x2 + 5u,
onde u(t, x) está definida para t ≥ 0 e 0 ≤ x ≤ 2π. Encontrem a solução satisfazendoas condições de fronteira e inicial listadas em cada uma das alíneas (ou seja, cada alíneacorresponde a uma solução distinta).
(a) u(t, 0) = u(t, 2π) = 0, u(0, x) = sin x;(b) u(t, 0) = u(t, 2π) = 0, u(0, x) = 3 sin x + sin(2x);(c) u(t, 0) = u(t, 2π) = 0, u(0, x) = sin(x/2);(d) u(t, 0) = u(t, 2π) = 0, u(0, x) = cos x;(e) u(t, 0) = u(t, 2π) = 0, u(0, x) = x;(f) ∂ u
∂ x(t, 0) = ∂ u
∂ x(t, 2π) = 0, u(0, x) = 3cos(2x);
(g) ∂ u∂ x(t, 0) = ∂ u
∂ x(t, 2π) = 0, u(0, x) = sin x;
(h) ∂ u∂ x(t, 0) = ∂ u
∂ x(t, 2π) = 0, u(0, x) = x;
(i) ∂ u∂ x(t, 0) = ∂ u
∂ x(t, 2π) = 0, u(0, x) = H0(x)−H1(x);
(j) u(t, 0) = ∂ u∂ x(t, 2π) = 0, u(0, x) = sin(2x);
(k) u(t, 0) = ∂ u∂ x(t, 2π) = 0, u(0, x) = 3sin(2x)− 5cos(4x);
(l) u(t, 0) = ∂ u∂ x(t, 2π) = 0, u(0, x) = x;
(m) u(t, 0) = ∂ u∂ x(t, 2π) = 0, u(0, x) = 1;
(n) ∂ u∂ x(t, 0) = u(t, 2π) = 0, u(0, x) = 1;
(o) ∂ u∂ x(t, 0) = u(t, 2π) = 0, u(0, x) = cos(2x) + 5 cos(4x);
(p) ∂ u∂ x(t, 0) = u(t, 2π) = 0, u(0, x) = cos(3x).
94/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 7: ALGUMAS EDPS
(7.22) Exercício. Consideramos agora uma variante com coeficientes não constantes:
∂ u
∂ t(t, x) = t3 ∂
2u
∂ x2 + 5u,
com t ≥ 0 e 0 ≤ x ≤ π2
e com condições de fronteira ∂ u∂ x(t, 0) = ∂ u
∂ x(t, π
2) = 0. Qual a
solução geral, escrita como série de cossenos? Qual a solução com condição inicial u(0, x) =π− e cos(2x)?
(7.23) Exercício. Quais as soluções, com domínio t ≥ 0 e 0 ≤ x ≤ 2π e com condições defronteira u(t, 0) = u(t, 2π) = 0 e condição inicial u(0, x) = sin x
2, das seguintes equações?
(a)∂ u
∂ t= 8
∂ 2u
∂ x2+(sin t) u; (b)∂ u
∂ t=
4
t + 3
∂ 2u
∂ x2−2tu; (c)∂ u
∂ t=∂ 2u
∂ x2+u−sin x .
(7.24) A EQUAÇÃO DAS ONDAS aparece em contextos diferentes. Em dimensão (espacial)1, com variáveis t e x , podemos pensar que u descreve o deslocamento (por exemplo, depontos num material elástico) em relação à posição de equilíbrio, e que o momento é aquantidade conservada. Para um material de densidade constante, é razoável dizer que omomento é a ∂ u
∂ t, onde a > 0 é uma constante, e aproximar a variação na distância entre
pontos do material por ∂ u∂ x
. Como a transferência de momento corresponde a uma força ea força elástica é proporcional à diferença entre essa distância e o seu valor de equilíbrio,escrevemos F = −k ∂ u
∂ x, onde k > 0. Portanto, de acordo com a equação da continuidade
(7.13), teríamos ∂∂ t∂ u∂ t= c2 ∂
∂ x∂ u∂ x
, onde c2 = ka
é uma constante positiva.A forma adequada de modelar o problema em dimensão mais alta depende do pró-
prio problema. Para os nossos fins, vamos simplesmente admitir que a nossa análise emdimensão 1 se mantenha válida ao longo de cada curva tangente a F = −k grad u, e quechegaríamos sempre a algo como (exemplificando em dimensão 3)
∂ 2u
∂ t2 = c2 divgrad u= c2 lap u= c2 ∂ 2u
∂ x2 +∂ 2u
∂ y2 +∂ 2u
∂ z2
.
Os próximos exercícios exploram variantes desta equação em dimensão 1 (ou 2, contandotambém a variável t). Como vamos ver, c pode ser vista como a velocidade das ondas.
(7.25) Exercício. Queremos encontrar a solução u(t, x), com t ≥ 0 e 0≤ x ≤ π, da EDP
∂ 2u
∂ t2 =∂ 2u
∂ x2 + 3u
com condições de fronteira u(t, 0) = u(t,π) = 0 e condições iniciais u(0, x) = sin x −3sin(2x) e ∂ u
∂ t(0, x) = 4 sin(2x).
(a) Comecem por mostrar que a série adequada é u(t, x) =∑
k>0 bk(t) sin(kx).(b) Mostrem que a equação satisfeita por bk(t) é (D2 − 3+ k2) bk = 0 (usando D para
indicar a derivada em ordem a t).
95/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
(c) Para cada k > 0, determinem bk(0) e b′k(0). Em particular, decidam quais os valoresde k que não são relevantes para o resto do problema.
(d) Para cada valor relevante de k, determinem a solução bk da equação da alínea (b)com as condições iniciais indicadas na alínea (c). Notem que valores diferentes de k levama tipos diferentes de solução.
(e) Juntem toda a informação das alíneas anteriores e obtenham uma expressão para asolução u(t, x).
(7.26) Exercício. Encontrem a solução u(t, x), com t ≥ 0 e 0≤ x ≤ π, da EDP
∂ 2u
∂ t2 =∂ 2u
∂ x2 + 4u
com condições de fronteira u(t, 0) = u(t,π) = 0 e condições iniciais u(0, x) = 2 sin(2x)−3sin(3x) + 4sin(4x) e ∂ u
∂ t(0, x) = 3 sin(2x).
(7.27) Exercício. Considerem a EDP
∂ 2u
∂ t2 = 9∂ 2u
∂ x2 ,
onde u(t, x) está definida para t ≥ 0 e 0 ≤ x ≤ 2π. Em cada alínea, encontrem a soluçãosatisfazendo as condições indicadas.
(a) u(t, 0) = u(t, 2π) = 0, u(0, x) = 3sin x + sin(2x), ∂ u∂ t(0, x) = 0;
(b) u(t, 0) = u(t, 2π) = 0, u(0, x) = 0, ∂ u∂ t(0, x) = sin(x/2);
(c) u(t, 0) = u(t, 2π) = 0, u(0, x) = 3 sin x + sin(2x), ∂ u∂ t(0, x) = sin(x/2);
(d) u(t, 0) = u(t, 2π) = 0, u(0, x) = x , ∂ u∂ t(0, x) = 0;
(e) ∂ u∂ x(t, 0) = ∂ u
∂ x(t, 2π) = 0, u(0, x) = 0, ∂ u
∂ t(0, x) = 3 cos(2x);
(f) ∂ u∂ x(t, 0) = ∂ u
∂ x(t, 2π) = 0, u(0, x) = 0, ∂ u
∂ t(0, x) = π;
(g) ∂ u∂ x(t, 0) = ∂ u
∂ x(t, 2π) = 0, u(0, x) = cos x , ∂ u
∂ t(0, x) = x;
(h) u(t, 0) = ∂ u∂ x(t, 2π) = 0, u(0, x) = sin(3x/4), ∂ u
∂ t(0, x) = 3
4sin(x/4);
(i) u(t, 0) = ∂ u∂ x(t, 2π) = 0, u(0, x) = 0, ∂ u
∂ t(0, x) = 1;
(j) ∂ u∂ x(t, 0) = u(t, 2π) = 0, u(0, x) =−6cos(x/4), ∂ u
∂ t(0, x) = 0;
(k) ∂ u∂ x(t, 0) = u(t, 2π) = 0, u(0, x) = 0, ∂ u
∂ t(0, x) =−6cos(x/4);
(l) ∂ u∂ x(t, 0) = u(t, 2π) = 0, u(0, x) = ∂ u
∂ t(0, x) =−6 cos(x/4).
(7.28) Exercício. Encontrem a solução u(t, x), com t ≥ 0 e 0≤ x ≤ π2
, da EDP
∂ 2u
∂ t2 =∂ 2u
∂ x2 − 3 cos x sin(2t),
com condições de fronteira u(t, 0) = ∂ u∂ x(t, π
2) = 0 e condições iniciais u(0, x) = sin(3x) e
∂ u∂ t(0, x) = 2cos x .
(7.29) Exercício. Encontrem a solução geral u(t, x), com t ≥ 0 e 0≤ x ≤ 1, da EDP
∂ 2u
∂ t2 = c2 ∂2u
∂ x2
96/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 7: ALGUMAS EDPS
(c > 0 é uma constante) com condições de fronteira u(t, 0) = u(t, 1) = 0.(a) Considerem primeiro condições iniciais da forma u(0, x) = Asin(`x) e ∂ u
∂ t(0, x) =
B sin(`x). Quais os valores razoáveis para `?(b) Fixem u(0, x) = Asin(`x) e ∂ u
∂ t(0, x) = 0. Qual a solução? Escrevam-na com base
em sin(`c t + `x) e sin(`c t − `x). Qual diriam que é a velocidade dessas ondas?(c) Fixem agora u(0, x) = 0 e ∂ u
∂ t(0, x) = B sin(`x). Qual a solução? Escrevam-na com
base em cos(`c t + `x) e cos(`c t − `x). Qual diriam que é a velocidade dessas ondas?(d) Qual a solução geral da EDP, escrita em série de senos?
(7.30) Exercício. Considerem de novo uma solução u(t, x) de
∂ 2u
∂ t2 = c2 ∂2u
∂ x2 ,
onde c > 0 é uma constante. Vamos usar a mudança de variável a = x − c t e b = x + c t.(a) Escrevam t e x em função de a e b. Usem essas expressões para escrever u em
função de a e b.(b) Calculem ∂
∂ b∂ u∂ a
e mostrem que é igual a 0. Concluam que ∂ u∂ a
é uma função apenasde a, e que u= f (a) + g(b) = f (x − c t) + g(x + c t).
(c) Mostrem que se u(t, 0) = 0 para todo o t > 0, então g(x) = − f (−x). Mostrem quese u(t, 0) = u(t,`) = 0 para todo o t, então f e g têm período 2`. Conseguem encontraroutras propriedades de f e g quando u satisfaz os vários tipos de condições de fronteira?
(d) Se h for uma primitiva de 1c∂ u∂ t(0, x) com h(0) = g(0)− f (0), mostrem que
f (x) =u(0, x)− h(x)
2e g(x) =
u(0, x) + h(x)2
.
(e) Concluam que
u(t, x) =u(0, x + c t) + u(0, x − c t)
2+
1
2c
∫ x+c t
x−c t
∂ u
∂ t(0, s)ds .
(7.31) A EQUAÇÃO DE LAPLACE aparece frequentemente quando lidamos com potenciais decampos. Um caso típico é o campo eletrostático, em que, na ausência de carga, o potencialé uma função harmónica, ou seja, é uma solução de
∂ 2u
∂ x2 +∂ 2u
∂ y2 +∂ 2u
∂ z2 = 0.
Em duas variáveis, sabemos que a parte real e a imaginária de uma função holomorfa sãoharmónicas. Também podemos usar séries de Fourier para encontrar soluções.
Suponham que u(x , y) define uma função harmónica em 0 ≤ x ≤ 2 e 0 ≤ y ≤ 1 e comcondições de fronteira u(x , 0) = 0, u(x , 1) = (eπ − e−π) sin(πx), u(0, y) = 3eπ sin(πy),u(2, y) = 3e−π sin(πy). Com os métodos que vimos até aqui, não é possível exprimir di-retamente a solução de uma tal equação. Com efeito, o que sempre fizemos foi escolher avariável com um domínio limitado e escolhido o tipo de série com base nas condições de
97/99

JOÃO PEDRO BOAVIDA, EPISÓDIOS DE EQUAÇÕES DIFERENCIAIS, 2015
fronteira relativas a essa variável. Ora, nenhuma destas condições de fronteira é compatívelcom as séries que vimos.
Felizmente, a equação de Laplace é linear, portanto podemos escrever u = u1 + u2,onde u1 e u2 também satisfazem a equação de Laplace, mas cada uma delas tem as condi-ções de fronteira relativas a uma variável. Por exemplo, para u1 impomos u1(x , 0) = 0,u1(x , 1) = (eπ − e−π) sin(πx), e u1(0, y) = u1(2, y) = 0, enquanto para u2 impomosu2(x , 0) = u2(x , 1) = 0, u2(0, y) = 3eπ sin(πy), e u2(2, y) = 3e−π sin(πy).
(7.32) Exercício. Vamos determinar u a partir de u1 e u2.(a) Resolvam a equação para u1, depois de mostrar que a série adequada é
u1(x , y) =∑
k>0
bk(y) sinπkx
2.
(b) Resolvam a equação para u2, depois de mostrar que a série adequada é
u2(x , y) =∑
k>0
bk(x) sin(πk y).
(c) Verifiquem que u1+ u2 satisfaz as condições de fronteira de u e determinem u.
(7.33) Exercício. Considerem a EDP
∂ 2u
∂ x2 +∂ 2u
∂ y2 = 0,
onde u(x , y) está definida para 0 ≤ x ≤ 2π e 0 ≤ y ≤ π. Em cada alínea, encontrem asolução satisfazendo as condições indicadas.
(a) u(x , 0) = 3sin(2x), u(x ,π) = 3e2π sin(2x), u(0, y) = sin y, u(2π, y) = e−2π sin y;(b) u(x , 0) =−e−4π cos(4x), u(x ,π) =− cos(4x), ∂ u
∂ x(0, y) = ∂ u
∂ x(2π, y) = 0;
(c) u(x , 0) = u(x ,π) = 0, ∂ u∂ x(0, y) = sin(2y), ∂ u
∂ x(2π, y) = e4π sin(2y);
(d) u(x , 0) = 0, u(x ,π) = (e2π−1) cos x , ∂ u∂ x(0, y) = sin(2y), ∂ u
∂ x(2π, y) = e4π sin(2y);
(e) u(x , 0) = 0, u(x ,π) = 3(eπ− 1) cos(x/2), ∂ u∂ x(0, y) = ∂ u
∂ x(2π, y) = 0;
(f) u(x , 0) = 0, u(x ,π) = x −π, ∂ u∂ x(0, y) = ∂ u
∂ x(2π, y) = 0;
(g) u(x , 0) = 1, u(x ,π) = 0, u(0, y) = ∂ u∂ x(2π, y) = 0.
(7.34) Exercício. Consideramos agora, para uma constante λ, a EDP
∂ 2u
∂ x2 +∂ 2u
∂ y2 = λu,
com condições de fronteira u(x , 0) = u(x , 2) = u(0, y) = u(π, y) = 0, onde 0 ≤ x ≤ π e0 ≤ y ≤ 2. Mostrem que se u 6= 0, então λ = −k2 − π2
4`2, onde k e ` são inteiros positivos,
e u é um múltiplo de x , y 7→ sin(kx) sin `πy2
.
98/99

Cop
yrig
htc©
2015
,Joã
oPe
dro
Boa
vida
.Ve
rsão
atua
ldis
poní
vele
mht
tp:/
/web
.tec
nico
.uli
sboa
.pt/
joao
.boa
vida
/201
5/AC
ED/.
EPISÓDIO 7: ALGUMAS EDPS
(7.35) RESPOSTAS DE EXERCÍCIOS.
(7.4) (a) cos x + x y2 + 1. (b) e2x + x2 + y .(c) − 1
2cos y + 3
2e2x cos y . (d) 4x2 − x y + y2.
(e) (ex/y) + 3x . (f) −y cosp
x .
(7.6) (a) x − 32
y + 14
y2. (b) e2y x − 32
y
.
(c) e y2/4 x − 32
y
.
(d) x − 32
y + 12
x y − 38
y2 − 16
y3.
(7.8) (a) x2 + y + e2x y + 1. (b) x y + e2x y .(c) x y − 1
3x3. (d) 1
2x2 + 2
3x3 − 2x y + 1.
(e) exp( 12
x2 + y). (f) 12
x2 − 2 sin x + y .(g) x + (y − sin x)2. (h) 2 sin x ex − 2yex .(i) sin x + cos
y/(1+ x2)
.
(7.11) (a) t 7→ (x0 et ,−et). R.(b) (x , y) ∈ R2 : y < 0. não. (c) x .
(7.12) (a) t 7→ (x0 cos t, x0 sin t). R. (b) x y .(c) u(r cosθ , r sinθ) = θ se r > 0 e −π < θ < π.não.
(7.21) (a) e4t sin x . (b) 3e4t sin x + et sin(2x).
(c) e19t/4 sin(x/2). (d)∑
n>0n ímpar
4n/πn2−4
e(5−n2
4) t sin nx
2.
(e)∑
n>0−4 (−1)n
ne(5−
n2
4) t sin nx
2. (f) 3et cos(2x).
(g)∑
n>0n ímpar
− 8/πn2−4
e(5−n2
4) t cos nx
2.
(h) πe5t +∑
n>0n ímpar
− 8πn2 e(5−
n2
4) t cos nx
2.
(i) 12π
e5t +∑
n>02πn
sin n2
e(5−n2
4) t cos nx
2.
(j)∑
n>0n ímpar
32/πn2−64
sin πn2
e(5−n2
16) t sin nx
4.
(k)∑
n>0n ímpar
96/πn2−64
sin πn2− 20n/π
n2−256
e(5−n2
16) t sin nx
4.
(l)∑
n>0n ímpar
16πn2 sin πn
2e(5−
n2
16) t sin nx
4.
(m)∑
n>0n ímpar
4πn
e(5−n2
16) t sin nx
4.
(n)∑
n>0n ímpar
4πn
sin πn2
e(5−n2
16) t cos nx
4.
(o)∑
n>0n ímpar
4n/πn2−64
+ 20n/πn2−256
sin πn2
e(5−n2
16) t cos nx
4.
(p)∑
n>0n ímpar
4n/πn2−144
sin πn2
e(5−n2
16) t cos nx
4.
(7.22)∑
n≥0 e5t−n2 t4an(0) cos(2nx).
πe5t − e1+5t−t4cos(2x).
(7.23) (a) e1−cos t−2t sin x2. (b) 3
t+3e−t2
sin x2.
(c) e3t/4 sin x2− t sin x .
(7.25) (c) b1(0) = 1; b2(0) =−3; b′2(0) = 4.
(d) b1(t) =12
ep
2 t + e−p
2 t;b2(t) = 4 sin t − 3cos t. (e)12
ep
2 t + e−p
2 t) sin x+(4 sin t−3cos t) sin(2x).
(7.26) (2+ 3t) sin(2x)− 3 cos(p
5 t) sin(3x) +4cos(
p12 t) sin(4x).
(7.27) (a) 3 sin x cos(3t) + sin(2x) cos(6t).(b) 2
3sin x
2sin 3t
2. (c)
3 sin x cos(3t) + sin(2x) cos(6t) + 23
sin x2
sin 3t2
.
(d)∑
n>0−4 (−1)n
nsin nx
2cos 3nt
2.
(e) 12
cos(2x) sin(6t). (f) πt. (g)
cos x cos(3t) +πt −∑n>0n ímpar
163πn3 cos nx
2sin 3nt
2.
(h) sin x4
sin 3t4+ sin 3x
4cos 9t
4.
(i)∑
n>0n ímpar
163πn2 sin nx
4sin 3nt
4.
(j) −6 cos x4
cos 3t4
. (k) −8 cos x4
sin 3t4
.
(l) −6 cos x4
cos 3t4− 8cos x
4sin 3t
4.
(7.28) sin(3x) cos(3t) + cos x sin(2t).
(7.29) (a) `= nπ, com n ∈ Z.(b) Acos(`c t) sin(`x) =A2
sin(`c t + `x)− A2
sin(`c t − `x).(c) B
`csin(`c t) sin(`x) =
B2`c
cos(`c t − `x)− B2`c
cos(`c t + `x).
(d)∑
n>0
An cos(nπc t) + Bn
nπcsin(nπc t)
sin(nπx).
(7.30) (a) t = b−a2c
; x = a+b2
; u b−a
2c, a+b
2
.
(7.32) (a) eπy sin(πx)− e−πy sin(πx).(b) 3eπ−πx sin(πy).(c) eπy sin(πx)− e−πy sin(πx) + 3eπ−πx sin(πy).
(7.33) (a) 3e2y sin(2x) + e−x sin y .
(b) −e4y−4π cos(4x). (c) 12e2x sin(2y).
(d) eπ+y cos x − eπ−y cos x + 12e2x sin(2y).
(e) 3eπ/2
e y/2 − e−y/2 cos(x/2).(f)∑
n>0n ímpar
− 8πn2
exp(ny/2)−exp(−ny/2)exp(nπ/2)−exp(−nπ/2)
cos nx2
.
(g)∑
n>0n ímpar
4πn
exp(n(π−y)/4)−exp(n(y−π)/4)exp(nπ/4)−exp(−nπ/4)
sin nx4
.
99/99