Energy of the Simple Harmonic Oscillator. The Total Mechanical Energy (PE + KE) Is Constant KINETIC...
18
Energy of the Simple Harmonic Oscillator
-
Upload
primrose-ball -
Category
Documents
-
view
229 -
download
0
Transcript of Energy of the Simple Harmonic Oscillator. The Total Mechanical Energy (PE + KE) Is Constant KINETIC...

Energy of the Simple Harmonic Oscillator

The Total Mechanical Energy (PE + KE) Is
Constant
KINETIC ENERGY:
•KE = ½ mv2
•Remember v = -ωAsin(ωt+ϕ)
•KE = ½ mω2A2sin2(ωt+ϕ)

The Total Mechanical Energy (PE + KE) Is
Constant
POTENTIAL ENERGY:
•PE = ½ kx2
•Remember x = Acos(ωt+ϕ)
•PE = ½ kA2cos2(ωt+ϕ)

The Total Mechanical Energy (PE + KE) Is
Constant Etot = KE + PE
•Etot = ½kA2(sin2(ωt+ϕ) + cos2(ωt+ϕ))
•Remember:
• ω2 = k/m
• sin2θ + cos2θ = 1
•Therefore Etot = ½kA2

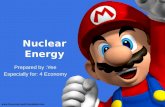
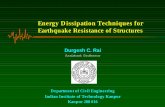
• Note that PE is small when KE is large and vice versa
• The sum of PE and KE is constant and the sum = ½ kA2
• Both PE and KE are always positive
• PE and KE vs time is shown on the left
• The variations of PE and KE with the displacement x are shown on the right

Velocity as a function of position for a Simple
Harmonic Oscillator
€
E =KE + PE = 12mv
2 + 12 kx
2 = 12 kA
2
v =k
m(A2 − x 2) = ±ω A2 − x 2

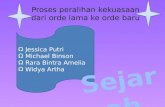
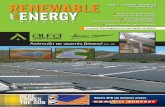
The Simple Pendulum

• The forces acting on the bob are tension, T, and the gravitational force, mg.
• The tangential component of the gravitational force, mgsinθ, always acts in the opposite direction of the displacement and is the restorative force.
•
• Where s is the displacement along the arc and s=Lθ
€
Ft = −mgsinθ = ma = md2s
dt 2∑
m
T
mg
mgsinθmgcosθ
L
θ

• The equation then reduces to:
•
• But this is not of the form:
because the second derivative is proportional to sinθ, not θ
€
d2θ
dt 2= −
g
Lsinθ
m
T
mg
mgsinθmgcosθ
L
θ
€
d2x
dt 2= −ω 2x

• BUT… we can assume that if θ is small that sinθ=θ (this is called the small angle approximation)
• So now the equation becomes:
• And now the expression follows that for simple harmonic motion
m
T
mg
mgsinθmgcosθ
L
θ
€
d2θ
dt 2= −
g
Lθ

SHM: The Pendulum• From this equation θ can be written as:
• θ = θmaxcos(ωt+Φ)
• Θmax is the maximum angular displacement
• ω, the angular frequency, is:
• because this follows the function
• The Period, T of the motion would be:
€
ω =g
L
€
d2x
dt 2= −ω 2x
€
T =2π
ω= 2π
L
g

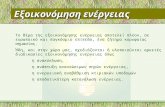
Damped Oscillations
• In many cases dissipative forces (like friction) act on an object.
• The Mechanical Energy diminishes with time and the motion is damped
• The retarding force can be expressed as: R = -bv (b is a constant, the damping coefficient)
• The restoring force can be expressed as F = -kx

• When we do the sum of the forces:
• The solution to this equation follows the form:
Damped Oscillations
€
Fx = −kx −bv = max∑
−kx −bdx
dt= m
d2x
dt 2
€
x = Ae− b2m t cos(ωt +φ)
ω =k
m−b
2m
⎛
⎝ ⎜
⎞
⎠ ⎟2

• When the retarding force < the restoring force, the oscillatory character is preserved but the amplitude decreases
• The amplitude decays exponentially with time
Damped Oscillations

• You can also express ω as:• ωo = √(k/m)
• ωo is the natural frequency
Damped Oscillations
€
ω = ω o2 −
b
2m
⎛
⎝ ⎜
⎞
⎠ ⎟2
•When the magnitude of the maximum retarding force bvmax< kA, the system is underdamped
•When b reaches a critical value, bc= 2mωo, the system does not oscillate and is critically damped
•If the retarding force is greater than the restoring force, bvmax > kA, the system is overdamped

Forced Oscillations
• The amplitude will remain constant if the energy input per cycle equals the energy lost due to damping
• This type of motion is called a force oscillation• Then the sum of the forces becomes:
€
Fx = Fext cosωt − kx −bv = max∑

Forced Oscillations
• The solution to this equation follows the form:
€
Fext cosωt − kx −bdx
dt= m
d2x
dt 2
€
x = Acos(ωt +φ)
where :
A =Fext
m (ω 2 −ωo2)2 +
bω
m
⎛
⎝ ⎜
⎞
⎠ ⎟2

Forced Oscillations
• When the frequency of the driving force equals the natural frequency ωo, resonance occurs
• At resonance the applied force is in phase with the velocity
• At resonance the power transferred to the oscillator is at a maximum