Energy Dissipated in Viscous Damping
8
description
Energy Dissipated in Viscous Damping
Transcript of Energy Dissipated in Viscous Damping
-
Sec. 3.8 Energy Dissipated in Viscous Damping 99
it moves. Such an instrument is unwieldy because of the heavy mass and soft spring, andbecause it must accommodate the anticipated support displacement, which may be as largeas 36 in. during earthquakes.
To examine the basic concept further, consider harmonic support displacement
ug(t) = ugo sin t (3.7.2)With the forcing function peff(t) = mug(t) = m2ugo sin t , Eq. (1.7.4) governs therelative displacement of the mass; this governing equation is the same as Eq. (3.2.1) forapplied harmonic force with po replaced by m2ugo. Making this substitution inEq. (3.2.10) and using Eqs. (3.1.9) and (3.2.20) gives
u(t) = Raugo sin(t ) (3.7.3)For excitation frequencies much higher than the natural frequency n , Ra is close tounity (Fig. 3.2.7c) and is close to 180, and Eq. (3.7.3) becomes
u(t) = ugo sin t (3.7.4)This recorded displacement is the same as the support displacement [Eq. (3.7.2)] exceptfor the negative sign, which is usually inconsequential. Damping of the instrument is nota critical parameter because it has little effect on the recorded motion if /n is verylarge.
3.8 ENERGY DISSIPATED IN VISCOUS DAMPING
Consider the steady-state motion of an SDF system due to p(t) = po sin t . The energydissipated by viscous damping in one cycle of harmonic vibration is
ED =
fD du = 2/
0(cu)u dt =
2/0
cu2 dt
= c 2/
0[uo cos(t )]2 dt = cu2o = 2
nku2o (3.8.1)
The energy dissipated is proportional to the square of the amplitude of motion. Itis not a constant value for any given amount of damping and amplitude since the energydissipated increases linearly with excitation frequency.
In steady-state vibration, the energy input to the system due to the applied force isdissipated in viscous damping. The external force p(t) inputs energy to the system, whichfor each cycle of vibration is
EI =
p(t) du = 2/
0p(t)u dt
= 2/
0[po sin t][uo cos(t )] dt = pouo sin (3.8.2)
FarhangRectangle
-
100 Response to Harmonic and Periodic Excitations Chap. 3
Utilizing Eq. (3.2.12) for phase angle, this equation can be rewritten as (see Derivation 3.6)EI = 2
nku2o (3.8.3)
Equations (3.8.1) and (3.8.3) indicate that EI = ED .What about the potential energy and kinetic energy? Over each cycle of harmonic
vibration the changes in potential energy (equal to the strain energy of the spring) andkinetic energy are zero. This can be confirmed as follows:
ES =
fS du = 2/
0(ku)u dt
= 2/
0k[uo sin(t )][uo cos(t )] dt = 0
EK =
f I du = 2/
0(mu)u dt
= 2/
0m[2uo sin(t )][uo cos(t )] dt = 0
The preceding energy concepts help explain the growth of the displacement ampli-tude caused by harmonic force with = n until steady state is attained (Fig. 3.2.2). For = n , = 90 and Eq. (3.8.2) gives
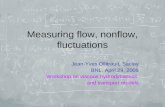
EI = pouo (3.8.4)The input energy varies linearly with the displacement amplitude (Fig. 3.8.1). In contrast,the dissipated energy varies quadratically with the displacement amplitude (Eq. 3.8.1). Asshown in Fig. 3.8.1, before steady state is reached, the input energy per cycle exceedsthe energy dissipated during the cycle by damping, leading to a larger amplitude of dis-placement in the next cycle. With growing displacement amplitude, the dissipated energyincreases more rapidly than does the input energy. Eventually, the input and dissipatedenergies will match at the steady-state displacement amplitude uo, which will be boundedno matter how small the damping. This energy balance provides an alternative means of
EIED
EI = ED
Ener
gy
uo
AmplitudeFigure 3.8.1 Input energy EI and energydissipated ED in viscous damping.
-
Sec. 3.8 Energy Dissipated in Viscous Damping 101
finding uo due to harmonic force with = n; equating Eqs. (3.8.1) and (3.8.4) gives pouo = cnu2o (3.8.5)
Solving for uo leads to
uo = pocn
(3.8.6)
This result agrees with Eq. (3.2.7), obtained by solving the equation of motion.We will now present a graphical interpretation for the energy dissipated in viscous
damping. For this purpose we first derive an equation relating the damping force fD to thedisplacement u:
fD = cu(t) = cuo cos(t )
= c
u2o u2o sin2(t )
= c
u2o [u(t)]2
This can be rewritten as (u
uo
)2+( fD
cuo
)2= 1 (3.8.7)
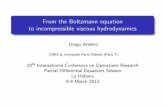
which is the equation of the ellipse shown in Fig. 3.8.2a. Observe that the fDu curveis not a single-valued function but a loop known as a hysteresis loop. The area enclosedby the ellipse is (uo)(cuo) = cu2o, which is the same as Eq. (3.8.1). Thus the areawithin the hysteresis loop gives the dissipated energy.
u
u > 0
u < 0
uo
cuo
fD
(a)
uo
fS = kukuo
fD + fS
cuoLoading, u > 0
Unloading, u < 0
u
(b)
Figure 3.8.2 Hysteresis loops for (a) viscous damper; (b) spring and viscous damper in parallel.
-
102 Response to Harmonic and Periodic Excitations Chap. 3
It is of interest to examine the total (elastic plus damping) resisting force becausethis is the force that is measured in an experiment:
fS + fD = ku(t) + cu(t)= ku + c
u2o u2 (3.8.8)
A plot of fS + fD against u is the ellipse of Fig. 3.8.2a rotated as shown in Fig. 3.8.2bbecause of the ku term in Eq. (3.8.8). The energy dissipated by damping is still the area en-closed by the ellipse because the area enclosed by the single-valued elastic force, fS = ku,is zero.
The hysteresis loop associated with viscous damping is the result of dynamic hystere-sis since it is related to the dynamic nature of the loading. The loop area is proportionalto excitation frequency; this implies that the forcedeformation curve becomes a single-valued curve (no hysteresis loop) if the cyclic load is applied slowly enough ( = 0). Adistinguishing characteristic of dynamic hysteresis is that the hysteresis loops tend to beelliptical in shape rather than pointed, as in Fig. 1.3.1c, if they are associated with plasticdeformations. In the latter case, the hysteresis loops develop even under static cyclic loads;this phenomenon is therefore known as static hysteresis because the forcedeformationcurve is insensitive to deformation rate.
In passing, we mention two measures of damping: specific damping capacity andthe specific damping factor. The specific damping capacity, ED/ESo, is that fractional partof the strain energy, ESo = ku2o/2, which is dissipated during each cycle of motion; bothED and ESo are shown in Fig. 3.8.3. The specific damping factor, also known as the lossfactor, is defined as
= 12
EDESo
(3.8.9)
If the energy could be removed at a uniform rate during a cycle of simple harmonic motion(such a mechanism is not realistic), could be interpreted as the energy loss per radian
ED
ESo
Deformation
Res
istin
g fo
rce
Figure 3.8.3 Definition of energy lossED in a cycle of harmonic vibration andmaximum strain energy ESo.
-
Sec. 3.9 Equivalent Viscous Damping 103
divided by the strain energy, ESo. These two measures of damping are not often used instructural vibration since they are most useful for very light damping (e.g., they are usefulin comparing the damping capacity of materials).Derivation 3.6
Equation (3.8.2) gives the input energy per cycle where the phase angle, defined by Eq. (3.2.12),can be expressed as
sin =(
2
n
)Rd =
(2
n
)uo
po/k
Substituting this in Eq. (3.8.2) gives Eq. (3.8.3).
3.9 EQUIVALENT VISCOUS DAMPING
As introduced in Section 1.4, damping in actual structures is usually represented by equiv-alent viscous damping. It is the simplest form of damping to use since the governingdifferential equation of motion is linear and hence amenable to analytical solution, as seenin earlier sections of this chapter and in Chapter 2. The advantage of using a linear equationof motion usually outweighs whatever compromises are necessary in the viscous dampingapproximation. In this section we determine the damping coefficient for viscous dampingso that it is equivalent in some sense to the combined effect of all damping mechanismspresent in the actual structure; these were mentioned in Section 1.4.
The simplest definition of equivalent viscous damping is based on the measured re-sponse of a system to harmonic force at exciting frequency equal to the natural frequencyn of the system. The damping ratio eq is calculated from Eq. (3.4.1) using measured val-ues of uo and (ust)o. This is the equivalent viscous damping since it accounts for all theenergy-dissipating mechanisms that existed in the experiments.
Another definition of equivalent viscous damping is that it is the amount of dampingthat provides the same bandwidth in the frequency-response curve as obtained experimen-tally for an actual system. The damping ratio eq is calculated from Eq. (3.2.24) using theexcitation frequencies fa , fb, and fn (Fig. 3.4.1) obtained from an experimentally deter-mined frequency-response curve.
The most common method for defining equivalent viscous damping is to equate theenergy dissipated in a vibration cycle of the actual structure and an equivalent viscous sys-tem. For an actual structure the force-displacement relation is obtained from an experimentunder cyclic loading with displacement amplitude uo; such a relation of arbitrary shape isshown schematically in Fig. 3.9.1. The energy dissipated in the actual structure is givenby the area ED enclosed by the hysteresis loop. Equating this to the energy dissipated inviscous damping given by Eq. (3.8.1) leads to
4eq
nESo = ED or eq = 14
1/n
EDESo
(3.9.1)
-
104 Response to Harmonic and Periodic Excitations Chap. 3
uoED
ESo
Deformation
Res
istin
g fo
rce
Figure 3.9.1 Energy dissipated ED in acycle of harmonic vibration determined fromexperiment.
where the strain energy, ESo = ku2o/2, is calculated from the stiffness k determined byexperimentation.
The experiment leading to the forcedeformation curve of Fig. 3.9.1 and hence EDshould be conducted at = n , where the response of the system is most sensitive todamping. Thus Eq. (3.9.1) specializes to
eq = 14EDESo
(3.9.2)
The damping ratio eq determined from a test at = n would not be correct at any otherexciting frequency, but it would be a satisfactory approximation (Section 3.10.2).
It is widely accepted that this procedure can be extended to model the damping insystems with many degrees of freedom. An equivalent viscous damping ratio is assignedto each natural vibration mode of the system (defined in Chapter 10) in such a way that theenergy dissipated in viscous damping matches the actual energy dissipated in the systemwhen the system vibrates in that mode at its natural frequency.
In this book the concept of equivalent viscous damping is restricted to systems vi-brating at amplitudes within the linearly elastic limit of the overall structure. The energydissipated in inelastic deformations of the structure has also been modeled as equivalentviscous damping in some research studies. This idealization is generally not satisfactory,however, for the large inelastic deformations of structures expected during strong earth-quakes. We shall account for these inelastic deformations and the associated energy dis-sipation by nonlinear forcedeformation relations, such as those shown in Fig. 1.3.4 (seeChapters 5 and 7).Example 3.6
A body moving through a fluid experiences a resisting force that is proportional to the squareof the speed, fD = au2, where the positive sign applies to positive u and the negative signto negative u. Determine the equivalent viscous damping coefficient ceq for such forces actingon an oscillatory system undergoing harmonic motion of amplitude uo and frequency . Alsofind its displacement amplitude at = n .
-
Sec. 3.10 Harmonic Vibration with Rate-Independent Damping 105
Solution If time is measured from the position of largest negative displacement, the har-monic motion is
u(t) = uo cos tThe energy dissipated in one cycle of motion is
ED =
fD du = 2/
0fDu dt = 2
/0
fDu dt
= 2 /
0(au2)u dt = 2a3u3o
/0
sin3 t dt = 83 a2u3o
Equating this to the energy dissipated in viscous damping [Eq. (3.8.1)] gives
cequ2o =
83
a2u3o or ceq =8
3auo (a)
Substituting = n in Eq. (a) and the ceq for c in Eq. (3.2.15) gives
uo =(
38a
po2n
)1/2(b)
PART C: SYSTEMS WITH NONVISCOUS DAMPING
3.10 HARMONIC VIBRATION WITH RATE-INDEPENDENT DAMPING
3.10.1 Rate-Independent Damping
Experiments on structural metals indicate that the energy dissipated internally in cyclicstraining of the material is essentially independent of the cyclic frequency. Similarly,forced vibration tests on structures indicate that the equivalent viscous damping ratio isroughly the same for all natural modes and frequencies. Thus we refer to this type ofdamping as rate-independent linear damping. Other terms used for this mechanism of in-ternal damping are structural damping, solid damping, and hysteretic damping. We prefernot to use these terms because the first two are not especially meaningful, and the third isambiguous because hysteresis is a characteristic of all materials or structural systems thatdissipate energy.
Rate-independent damping is associated with static hysteresis due to plastic strain,localized plastic deformation, crystal plasticity, and plastic flow in a range of stresseswithin the apparent elastic limit. On the microscopic scale the inhomogeneity of stress dis-tribution within crystals and stress concentration at crystal boundary intersectionsproduce local stress high enough to cause local plastic strain even though the average(macroscopic) stress may be well below the elastic limit. This damping mechanism doesnot include the energy dissipation in macroscopic plastic deformations, which as men-tioned earlier, is handled by a nonlinear relationship between force fS and deformation u.
FarhangRectangle


![Gilbert damping in binary magnetic multilayers · E. BARATI AND M. CINAL PHYSICAL REVIEW B 95, 134440 (2017) ons-d exchangeattheinterfaces,hasbeenproposedbyBerger [53]. More recently,](https://static.fdocument.org/doc/165x107/5d4e675988c99303708b99e1/gilbert-damping-in-binary-magnetic-multilayers-e-barati-and-m-cinal-physical.jpg)