Elements of surgery theory - Kansas State University
206
RUSTAM SADYKOV ELEMENTS OF SURGERY THEORY
Transcript of Elements of surgery theory - Kansas State University

R U S TA M S A DY K O V
E L E M E N T S O F S U R G E R YT H E O R Y

Contents
0 Background information 7
0.1 Homotopy groups 7
0.2 Bordisms and Cobordisms 10
0.3 Homology and Cohomology 12
1 Stable homotopy groups of spheres 15
1.1 Framed submanifolds in Euclidean spaces 16
1.2 Cobordisms of framed manifolds 18
1.3 The Pontryagin construction 20
1.4 Example: The stable group πS0 22
1.5 Further reading 23
2 Immersion Theory 24
2.1 Ambient isotopy 25
2.2 The Global Compression Theorem 26
2.3 The Freudenthal suspension theorem 28
2.4 Further reading 30
3 Spherical surgeries 32
3.1 Surgery and cobordisms 33
3.2 Framed base of surgery 37
3.3 Reduction of homotopy groups 38
3.4 Examples: Stable homotopy groups πS1 and πS
2 39
3.5 Further reading 43

3
4 The Whitney trick 45
4.1 The Whitney weak embedding and immersion theorems 45
4.2 The Whitney trick 46
4.3 Strong Whitney embedding theorem 50
4.4 Strong Whitney immersion theorem 51
4.5 Solution to Exercises 53
4.6 Further reading 53
5 The Kervaire invariant and signature 55
5.1 The Wall representative and the invariant µ 56
5.2 Homotopy spheres 61
5.3 Bilinear and quadratic forms 63
5.4 Main theorems 66
5.5 Further reading 67
6 Surgery on framed manifolds 70
6.1 Invariance of signature and Kervaire invariant 71
6.2 The main theorems for even dimensional manifolds 73
6.3 The main theorems for odd dimensional manifolds 76
6.4 Solutions to exercises 79
7 Characteristic classes of vector bundles 84
7.1 Vector bundles over topological spaces 84
7.2 Characteristic classes of vector bundles 85
7.2.1 The Euler class 86
7.2.2 Stiefel-Whitney classes 87
7.2.3 Chern classes 89
7.2.4 Pontryagin classes 89
7.3 The Thom theorem on orientable cobordism groups 90
7.4 Example: Pontryagin classes of almost framed manifolds 91
8 Exotic spheres: discovery of exotic spheres S793
8.1 Maps of SU(2) and Spin(4) to orthogonal groups 94
8.1.1 The map SU(2)→ SO(3) 94
8.1.2 The map Spin(4)→ SO(4) 94
8.2 Milnor’s fiber bundles 95

4
8.3 The quaternionic Hopf fibration 97
8.4 Invariants of Milnor’s fibrations 98
8.5 Exotic spheres of dimension 7 100
8.6 Further reading 100
9 Exotic spheres 102
9.1 The group of smooth structures on a sphere 102
9.2 The surgery long exact sequence for spheres 105
9.3 Calculation of the group Pm106
9.4 Calculation of the group Nm. 108
9.5 Calculation of homomorphisms in the surgery exact sequence 110
9.6 Hirzebruch genera and computation of the L-genus 111
9.6.1 Multiplicative series 111
9.6.2 Genera of manifolds M4n with trivial p1, ..., pn−1. 113
9.7 Example: The third stable homotopy group πs3 114
9.8 Further reading 115
10 The h-cobordism theorem 116
10.1 Handle manipulation techniques 117
10.1.1 Handle rearrangement 117
10.1.2 Handle creation 118
10.1.3 Handle cancellation 119
10.1.4 Handle slides 119
10.1.5 Handle trading 120
10.2 The h-cobordism theorem 121
11 Surgery on maps of simply connected manifolds 127
11.1 Normal maps 127
11.2 Products in homology and cohomology 130
11.2.1 Tensor products 130
11.2.2 Naturality of the cup and cap products 131
11.2.3 Poincaré Duality 132
11.3 Degree one maps 133
11.4 The Browder-Novikov theorem 135
12 The surgery long exact sequence 137

5
13 (Co)homology with twisted coefficients 141
13.1 The Whitney trick in non-simply connected manifolds 142
13.2 Right and left Modules 144
13.3 Homology and cohomology with twisted coefficients 145
13.4 Products in (co)homology with twisted coefficients 147
13.5 Poincaré complexes 148
13.6 Homological algebra 150
13.7 The kernels KqM and KqM 151
14 Surgery on non-simply connected manifolds 153
14.1 Surgery below the middle range 153
14.2 Surgery on maps of manifolds of even dimension 154
14.2.1 Wall representatives 154
14.2.2 The intersection pairing λ and self-intersection form µ 156
14.2.3 Effect of surgery on homotopy groups 159
14.2.4 The main theorem 159
14.3 Surgery on maps of manifolds of odd dimension 160
14.3.1 Heegaard splittings 160
14.3.2 ε-quadratic formations 163
14.4 Further reading 168
14.5 Solutions to Exercises 168
99 Additional Topics 171
99.1 Topics for Chapter 1 172
99.1.1 Hopf fibration 172
99.1.2 Stable homotopy group πS1 173
99.1.3 The Pontryagin-Thom construction 174
99.1.4 The stable J-homomorphism 175
99.2 Topics for Chapter 2 177
99.2.1 The Multicompression theorem 177
99.2.2 The Smale-Hirsch Theorem 179
99.2.3 The Smale Paradox 181
99.2.4 Cobordisms of oriented immersed manifolds 182
99.2.5 The Local Compression Theorem 183
99.2.6 Solutions to Exercises 186
99.3 Topics for Chapter 3 189
99.3.1 Example: Cobordisms 189
99.3.2 Cairns-Whitehead technique of smoothing manifolds 189

6
99.4 Topics for Chapter 5 194
99.4.1 Bilinear forms on free modules 194
99.5 Topics for Chapter 6 195
99.5.1 Heegaard splittings 195
99.5.2 Alternative proof of the surgery theorem for framed manifolds of odd dimension 196
99.6 Topics for Chapter 14 199
99.6.1 The Whitehead torsion 199
99.6.2 The s-cobordism theorem 200

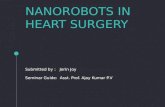
Figure 1: A CW-complex is constructedby induction beginning with a (red) dis-crete set X0, by attaching (blue) seg-ments, then (grey) 2-dimensional cellsand so on.
0
Background information
0.1 Homotopy groups
Pointed topological spaces. A pointed topological space is a topologicalspace X together with a point ∗ ∈ X called the basepoint of X. A mapof pointed topological spaces is required to take the basepoint in thedomain to the basepoint in the target. The pointed union X ∨ Y of apointed topological spaces X and Y is the space X tY/∼ in which thebasepoints of X and Y are identified.
Example 0.1. Let Sn denote the standard unit sphere centered at ori-gin in the Euclidean space Rn+1 with basis e1, ..., en. The sphere Sn be-comes pointed if we pick its south pole, i.e., the end point of −en+1 tobe the basepoint of Sn. The intersection of Sn with the hyperplane per-pendicular to e1 is a meridian Sn−1 of Sn. The quotient space Sn/Sn−1
is homeomorphic to the bouquet of spheres Sn ∨ Sn.
A homotopy of a map f : X → Y to a map g : X → Y is a continuousfamily of maps Ft : X → Y parametrized by t ∈ [0, 1] such that F0 = fand F1 = g. When the spaces X and Y are pointed, every map Ft in thehomotopy is required to be pointed as well. A space X is homotopyequivalent to a space Y if there are maps f : X → Y and g : Y → X suchthat g f is homotopic to the identity map of X, and f g is homotopyequivalent to the identity map of Y.
CW complexes. Most topological spaces that we will encounter areCW complexes. A CW complex X is constructed inductively beginningwith a discrete set X0 called the 0-skeleton of X. The n-skeleton Xn
is obtained from the (n − 1)-skeleton Xn−1 by attaching a collection

8 elements of surgery theory
tDnα of closed discs of dimension n with respect to attaching maps
ϕα : ∂Dnα → Xn−1. In other words, Xn consists of Xn−1 and the discs
Dnα with each x in the boundary ∂Dn
α identified with ϕα(x) ∈ Xn−1.We say that the interior of ∂Dn
α is an open cell enα . The so-constructed
space is a CW-complex X = ∪Xn. A set U in X is declared to be open(respectively, closed) if each intersection U ∩ Xn is open (respectively,closed).
Homotopy groups. For n ≥ 0, the set of homotopy classes [ f ] ofpointed maps f : Sn → X into a pointed topological space is denotedby πnX. The set πnX is a group when n > 0 with the sum [ f ] + [g]represented by the composition
Sn −→ Sn/Sn−1 ≈ Sn ∨ Sn f∨g−−→ X,
where the first map is one collapsing the meridian of Sn into a point.The set π0X is the set of path components of X. The group π1X is thefundamental group. The homotopy groups πnX with n > 1 are abelian. Aspace X is n-connected if the groups πiX are trivial in the range i ≤ n.Thus, a non-empty space is −1-connected, a path connected space is0-connected, while a simply connected space is 1-connected. A mapf : X → Y of topological spaces induces a homomorphism f∗ : πiX →πiY of homotopy groups by [g] 7→ [ f g].
Theorem 0.2 (Whitehead). Two path-connected CW-complexes X and Yare homotopy equivalent if and only if there exists a map f : X → Y whichinduces an isomorphism of homotopy groups f∗ : πiX → πiY for all i ≥ 0.
Relative homotopy groups. A pair (X, A) of pointed topological spacesconsists of a pointed topological space X and a pointed subspace Asuch that the distinguished point of A is the same as the distinguishedpoint of X. A map of pairs (X, A) → (Y, B) is a pointed map from Xto Y which takes the subspace A to B. Similarly, a homotopy of mapsf0, f1 of pairs is a continuous family Ft of maps of pairs parametrizedby t ∈ [0, 1] such that F0 = f0 and F1 = f1. Let Dn denote the stan-dard disc of dimension n, and Sn−1 its boundary. Then, the set ofhomotopy classes of maps from the pair (Dn, Sn−1) to a pair (X, A) isdenoted by πn(X, A). It is a group if n ≥ 2, and an abelian group forn ≥ 3. We note that when the subspace A is a point, the relative ho-motopy groups reduce to homotopy groups: πn(X, ∗) = πnX. Everymap of pairs f : (X, A) → (Y, B) induces a map f∗ of relative homo-topy groups π∗(X, A)→ π∗(Y, B). For any pair (X, A), there is a longexact sequence of homotopy groups:
· · · → πn+1(X, A)∂−→ πn A i∗−→ πnX
j∗−→ πn(X, A)→ · · · ,

background information 9
where i : A → X is the inclusion, j is the inclusion (X, ∗) ⊂ (X, A)
of pairs, while ∂ takes the class [ f ] of a map f : Dn → X to the class[ f |∂Dn] of the map f |∂Dn : Sn−1 → A.
A pair (X, A) is said to be n-connected if πi(X, A) = 0 for i ≤ n andany choice of a base point ∗ ∈ A.
Theorem 0.3. Let X be a CW complex decomposed as the union of sub-complexes A and B with nonempty connected intersection C = A ∪ B. If(A, C) is m-connected and (B, C) is n-connected, m, n ≥ 0, then the mapπi(A, C)→ πi(X, B) induced by inclusion is an isomorphism for i < m + nand a surjection for i = m + n.
Theorem 0.4 (Hatcher, Proposition 4.28). If a CW pair (X, A) is r-connectedand A is s-connected, with r, s ≥ 0, then the map πi(X, A) → πi(X/A)
induced by the quotient map X → X/A is an isomorphism for i ≤ r + s anda surjection for i = r + s + 1.
Let A and B be two vector spaces over a field k, or finitely gener-ated free abelian groups (in which case we put define k to be the ringZ). We say that a bilinear function ψ : A ⊗ B → k is non-degeneratewith respect to A if for any linear function f on A there is a uniquevector b ∈ B such that f (a) = ψ(a, b). Similarly, we say that ψ is non-degenerate with respect to the second factor if for any function f on Bthere is a vector a ∈ A such that f (b) = ψ(a, b).
Theorem 0.5. Suppose that W is an oriented compact manifold of dimension2q + 1 ≥ 5. Suppose that W and ∂W are q− 1 connected manifolds. Thenthe intersection pairing
πqW/Tor⊗ πq+1(W, ∂W)/Tor → Z
is non-degenerate with respect to the first factor, while the pairing
πq+1W/Tor⊗ πq(W, ∂W)/Tor → Z
is non-degenerate with respect to the second factor.
Proof. Let us prove the non-degeneracy of the first pairing. For thesecond pairing, the proof is similar.
By the Hurewicz isomorphism, the free part of πqW is isomorphic tothe free part of HqW. Since the homology pairing is non-degenerate,for every function f on the free part of HqW there is an element x f inthe free part of Hq+1(W, ∂W) such that f (y) = x f · y for all elements y

10 elements of surgery theory
1 See Exercise 23 in section 4.2 ofHatcher’s book.
in the free part of Hq+1(W, ∂W). By the Hurewicz theorem, the homo-morphism πq+1(W/∂W) → Hq+1(W/∂W) is surjective.1 Therefore,the element x f lifts to an element in πq+1(W/∂W). Finally, x f admitsa lift with respect to the map πq+1(W, ∂W) → Hq+1(W/∂W) sincesuch a map is surjective by Theorem 0.4.
For the second pairing, we have πq(W, ∂W) ≈ πq(W/∂W) is isomor-phic to Hq(W, ∂W). Therefore, for any function f on the part of thisgroup, there is a corresponding element x f in Hq+1(W) which can belifted to an element in πq+1W.
0.2 Bordisms and Cobordisms
Bordisms. We say that two maps f0 : M0 → X and f1 : M1 → Xof closed oriented manifolds into a topological space are bordant, ifthere is a map f : W → X of a compact manifold W with boundary∂W = M0 t (−M1) such that f |M0 = f0 and f |M1 = f1. The set ofbordism classes of maps of manifolds of dimension m into a manifoldN forms a group ΩmX with operation given by taking the disjointunion of maps.
More generally, given a compact oriented manifold M, a continuousmap f : (M, ∂M) → (X, A) is bordant to zero if there is a compact ori-ented manifold W with boundary ∂W = MtM′ and a map F : W → Xsuch that F|M = f and F(M′) ⊂ A. Two maps fi : (Mi, ∂Mi)→ (X, A)
are said to be bordant if f0 t f1 : (M0 ∪−M1, ∂M0 ∪−∂M1)→ (X, A) isbordant to zero. The set of bordant maps of manifolds of dimension mforms an abelian group Ωm(X, A). Clearly, we have Ωm(X, ∅) = ΩmX.
Every map g : (X′, A′) → (X, A) of pairs induces a homomorphismg∗ : Ω∗(X′, A′) → Ω∗(X, A) by [ f ] 7→ [g f ]. Homotopic maps g, g′
induce the same homomorphism g∗ = g′∗. There is a boundary ho-momorphism ∂ : Ωm(X, A) → Ωm−1 A defined by associating the classof f : (M, ∂M) → (X, A) with the class f |∂M : ∂M → A. For any pair(X, A) of spaces, there is a long exact sequence of abelian groups
→ Ωm+1(X, A)∂−→ Ωm A→ ΩmX → Ωm(X, A)→,
where i : A → X and j : (X, ∅) → (X, A) are the inclusions. The re-duced bordism group ΩmX is the kernel of the homomorphism ε∗ in-duced by the projection ε of X onto a one point space. There is an iso-morphism Ωm(X, A) ≈ Ωm(X/A) where X/∅ is the disjoint union of

background information 11
2 Note that oriented bordism classesare represented by maps of orientedclosed manifolds, while oriented cobor-dism classes are represented by orientedproper maps of manifolds which are notnecessarily oriented or closed.
X and a one point set. Suppose that U is a subset in X such that its clo-sure is in the interior of A. Then the inclusion (X \U, A \U)→ (X, A)
induces an isomorphism of bordism groups.
Cobordisms. We say that a proper map f : M→ N of manifolds is ori-ented if the normal bundle of a map f × i : M→ N×Rk for an embed-ding i : M → Rk with k 1 is oriented. Two orientations defined by iand i′ are equivalent, if they are compatible with an isotopy from i toi′. We say that two proper oriented maps f0 : M0 → N and f1 : M0 → Nare cobordant if there is a proper oriented map f : W → N of a manifoldwith boundary ∂W = M0 ∪M1 extending f0 and f1 in such a way thatthe orientation of f agrees with the orientations of f0 and f1. The setof cobordism classes of maps of dimension −q = dim M− dim N intoN is a group denoted by ΩqN. 2
Every smooth map g : N′ → N of manifolds defines a homomorphismg∗ : Ω∗N → Ω∗N′ by [ f ] 7→ [g∗ f ]. The homomorphism g∗ dependonly on the homotopy class of g. A proper oriented map g : N′ → N ofdimension d defines the so-called Gysin homomorphism g! : ΩmN′ →Ωm−dN by [ f ] 7→ [g f ].
Products. The external products
∧ : ΩmN ⊗Ωm′N′ → Ωm+m′(N × N′),
∧ : ΩdN ⊗Ωd′N′ → Ωd+d′(N × N′)
are defined by [ f1] ∧ [ f2] = [ f1 × f2]. There are also homomorphisms
/ : Ωq(N × N′)⊗ΩmN′ → Ωq−m(N),
\ : ΩqN ⊗Ωm(N × N′)→ Ωm−q(N′).
The first homomorphism is defined by [ f ]/[g] = [(π1 f f ∗(1N × g)].For example, suppose that both f and g are transverse embeddings.Then f f ∗(1N × g) is the inclusion into N × N′ of the intersectionof the images of f and g. The map π1 projects it to N. The secondhomomorphism is defined by [ f ]\[g] = [π2 g g∗( f × 1N′)].
The group Ω∗N is a ring with operation given by [ f1] ∪ [ f2] = ∆∗( f1 ∧f2) where ∆ : N → N × N is the diagonal map. There is also the ∩-product
∩ : ΩqN ⊗Ωm(N, ∂N) −→ Ωm−q(N, ∂N),
defined by the composition
ΩqN ⊗Ωm(N, ∂N)1⊗∆∗−−−→ ΩqN ⊗Ωm(N × (N, ∂N))
\−→ Ωm−q(N, ∂N).

12 elements of surgery theory
When N is a compact orientable manifold of dimension n, the class[N] of the identity map of (N, ∂N) is called the fundamental class ofN in Ωn(N, ∂N).
0.3 Homology and Cohomology
Let X be a CW-complex. We recall that it is constructed by inductionbeginning with a discrete set X0. The n-th skeleton Xn is obtained fromthe (n− 1)-skeleton by attaching to Xn−1 closed discs Dn
α of dimensionn by means of the attaching maps ϕα : ∂Dn
α → Xn−1. The interior enα of
the attached disc Dnα is called an open cell.
The algebraic counterpart of a CW-complex X is its chain complexC∗X. By definition, a chain complex C∗ is a sequence of abelian groupsCn together with homomorphisms dn : Cn → Cn−1 called the differ-entials such that dn dn+1 = 0. The condition dn dn+1 = 0 is equiv-alent to the requirement that the image of the homomorphism dn+1
belongs to the kernel of the homomorphism dn. Then, the so-calledhomology groups Hn(C∗) = ker dn/ im dn+1 can be defined.
The chain complex C∗X of a CW-complex X consists of the free abeliangroups CnX over the generators [en
α ] corresponding to the n-cells of X.The boundary map dn : CnX → Cn−1X is defined by taking a generator[en
α ] into the linear combination ∑β kα,β[en−1β ] of generators of Cn−1X
where kα,β is the number of times that the boundary of the cell enα
wraps around the cell en−1β . More precisely, the coefficient kα,β is the
degree of the map
Sn−1 = ∂Dnα
ϕα−→ Xn−1 → Xn−1/(Xn−1 \ en−1β ) ≈ Sn−1.
The homology groups of the chain complex C∗X of a CW-complex Xare simply denoted by HnX.
The dual of a chain complex (C∗, d∗) is a cochain complex (C∗, δ∗). Itconsists of abelian groups Cn = Hom(Cn, Z), and coboundary homo-morphisms δn : Cn → Cn+1. In other words, a cochain f in Cn is a linearfunction on chains in Cn. It is convenient to write 〈 f , x〉 for the valuef (x) of the function f on x. In this notation, the coboundary homomor-phism is defined by 〈δn f , x〉 = 〈 f , dn+1x〉. It follows that δn+1 δn = 0,and therefore the cohomology groups Hn(C∗) = ker δn/ im δn−1 canbe defined. The cohomology group of the chain complex C∗X of aCW-complex X are denoted by HnX.

background information 13
A map of chain complexes f : C∗ → C′∗ is a family of maps of abeliangroups fn : Cn → C′n such that d fn = fn−1 d. The requirement d fn = fn−1 d ensures that f gives rise to homomorphisms Hn(C∗) →Hn(C′∗) of homology groups and Hn(C∗) → Hn(C′∗) of cohomologygroups.
A cellular map f : X → Y of CW-complexes is a map that takes n-cellsof X to the n-th skeleton Yn. By the so-called Cellular Approxima-tion Theorem, every continuous map of CW-complexes can be contin-uously deformed to a cellular map.
A cellular map f defines a map C∗X → C∗Y of chain complexes byf ([en
α ]) = ∑ kα,β[enβ] where kα,β is the number of times the disc f (en
α)
raps around the cell enβ. More precisely, the coefficient kα,β is the degree
of the map
Sn ≈ Xn/(Xn \ enα)
f−→ Yn/(Yn \ enβ) ≈ Sn.
Dually, a cellular map f : X → Y of CW-complexes defines a mapC∗Y → C∗X of cochain complexes.
Products.
When C and C′ are chain complexes, a new chain complex C ⊗ C′
can be defined; its n-th entry is ∑i+j=n Ci ⊗ C′j, while the boundary
homomorphism d(c⊗ c′) = dc⊗ c′+(−1)kc⊗ dc′ where k is the degreeof c. For example, when X and Y are finite CW-complex, then X ×Y is also a finite CW-complex that consists of products of cells in Xand cells in Y. The chain complex C∗(X × Y) therefore is the tensorproduct C∗X ⊗ C∗Y of the chain complexes of X and Y. Similarly,the cochain complex C∗(X × Y) is the tensor product C∗X ⊗ C∗Y ofcochain complexes.
Unfortunately, the inclusion of the diagonal X → X × X is not acellular map. However, it can be approximated by a cellular map∆ : X → X × X. It has the property that its composition with anyof the two projections X × X → X is homotopic to the identity map.The cellular map ∆ defines the cup product
` : CnX⊗ CmX → Cn+mX
by identifying an element x⊗ y with an element in Cm+n(X × X) andthen setting x ` y = ∆∗(x⊗ y). The cup product is a chain map andtherefore defines a map on cohomology groups. The slant product
/ : Cn(X×Y)⊗ CkY → Cn−kX

14 elements of surgery theory
3 Hint: Let [1] denote a generator ofH0X, and [X] a generator of H2X. Sincethe composition of ∆ with any of thetwo projections X × X → X is homo-topic to the identity map, we deducethat ∆∗[1] = [1]⊗ [1] and ∆∗[X] = [1]⊗[X] + [X] ⊗ [1] + · · · , where · · · standsfor terms which do not involve [1] and[X]. Note that every cell ai maps under∆ into the diagonal in the torus whosemeridian and parallel are copies of ai .Therefore ∆∗(ai) = [1] ⊗ ai + ai ⊗ [1].Similarly, ∆∗(bi) = [1] ⊗ bi + bi ⊗ [1].Since
〈αi ⊗ β j, ∆∗[X]〉 = 〈∆∗(αi ⊗ β j), [X]〉,
we deduce that
∆∗[X] = [1]⊗ [X] + [X]⊗ [1]
+∑[ai ]⊗ [bi ]− [bi ]⊗ [ai ].
For the cap product, we have, for exam-ple,
[X] ∩ βi = ∆∗[X]/βi = ai .
is defined by first writing a chain a ∈ Cn(X × Y) as ∑ ai ⊗ a′i whereai ∈ C∗X and a′i ∈ C∗Y, and then setting a/b = ∑ b(a′i)ai. It is a chainmap and therefore it defines a map on homology and cohomologygroups. Together with the diagonal map ∆, the slant product definesthe cap product:
∩ : CnX⊗ CkX → Cn−kX
by a ∩ b = ∆∗a/b. Again, it is a chain map that induces a homomor-phism ∩ : HnX⊗ HkX → Hn−kX.
Example 0.6. The homology groups of a closed oriented surface X ofgenus g can be identified with Z in degrees 0 and 2, and with thegroup Z〈a1, b1, ..., ag, bg〉 in degree 1. Determine all product maps forX. 3

Figure 1.1: Lev Semenovich Pontryagin(1908–1988)
1
Stable homotopy groups of spheres
A quick look at the table of homotopy groups of spheres suffices toobserve that the groups πm+kSk on the diagonals are the same for allsufficiently high values of k and any fixed m. For example, each ofthe groups πkSk is isomorphic to Z. These are the groups on the left-most non-zero diagonal in Table 1.1. The groups π1+kSk on the nextdiagonal to the right are isomorphic to Z2 for k > 2, while the groupsπ2+kSk are isomorphic to Z2 for k > 1. In fact, we will see that for anym the groups πm+kSk are the same at least for k > m + 1. These areso-called stable homotopy groups of spheres, denoted by πS
m. In today’slecture we will recall the historically first approach to computing πS
mdue to Lev Pontryagin. Later we will use the Pontryagin constructionto prove the observed stabilization phenomenon, and compute the sta-ble groups πS
0 , πS1 , πS
2 and πS3 following the ideas of Pontryagin and
Rokhlin.
π1 π2 π3 π4 π5 π6 π7 π8 π9 π10 π11S1 Z 0 0 0 0 0 0 0 0 0 0
S20 Z Z Z2 Z2 Z12 Z2 Z2 Z3 Z15 Z2
S30 0 Z Z2 Z2 Z12 Z2 Z2 Z3 Z15 Z2
S40 0 0 Z Z2 Z2 Z×Z12 Z2
2 Z22 Z24 ×Z3 Z15
S50 0 0 0 Z Z2 Z2 Z24 Z2 Z2 Z2
S60 0 0 0 0 Z Z2 Z2 Z24 0 Z
S70 0 0 0 0 0 Z Z2 Z2 Z24 0
Table 1.1: For every m, the groupsπm+kSk on the m-th diagonal stabilize ask increases to infinity. The shaded ar-eas corresponds to the stable range k >m + 1.
It is worth mentioning that the Pontryagin approach admits an exten-sive generalization—the Pontryagin-Thom construction—which playsan indispensable role in contemporary homotopy theory.
To explain the Pontryagin construction we will need to review thenotions of a submanifold in a Euclidean space, smooth function ona submanifold, tangent and normal vectors, frame, exponential map,

16 elements of surgery theory
Figure 1.3: As subsets of R2, the circle Ais a closed submanifold, while the openinterval D is an open submanifold. Thecurves B, C and E are not submanifoldsfor their end points, double point, andthe corner respectively.
and tubular neighborhood of a manifold in a Euclidean space. Thereader familiar with these notions may skip the following section.
1.1 Framed submanifolds in Euclidean spaces
In order to compute stable homotopy groups of spheres, Pontryagincame up with an idea of replacing stable homotopy groups of sphereswith cobordism classes of framed smooth submanifolds in Euclideanspaces.
Informally, a smooth submanifold M of dimension m in Rm+k is asubset that locally looks like an open subset of Rm, see Figure 1.2.More precisely, a subset M ⊂ Rm+k is a smooth submanifold of di-mension m if for each point x in M there is a diffeomorphism Ψ ofa neighborhood V of the origin in Rm+k into a neighborhood U ofx ∈ Rm+k such that Ψ−1(M ∩U) is the intersection of V with the m-plane Rm ⊂ Rm+k defined in the standard coordinates (x1, ..., xm+k) bythe equations xm+1 = · · · = xm+k = 0.
Figure 1.2: A submanifold M in Rm+k .
It is also common to say that M is a manifold placed in Rm+k, or,simply, a manifold in Rm+k. A closed submanifold in Rm+k is onewhose underlying set is compact, while an open manifold is one withno closed components. You may see examples of submanifolds andnon-submanifolds in Figure 1.3.
Manifolds in Rm+k are ubiquitous. For example, almost all fibers ofany smooth map f : Rm+k → Rk are smooth (possibly empty) man-ifolds in Rm+k. Indeed, recall that a value y ∈ Rk is regular if the

stable homotopy groups of spheres 17
1 Sard Theorem. The set of non-regularvalues of a smooth map has measure zero.
2 Rank Theorem. Let f be a map froman open subset U of Rm+k to Rk suchthat the differential of f is surjective at apoint x in U. Then there are coordinates(x1, ..., xm+k) in a neighborhood of x andcoordinates in a neighborhood of f (x) suchthat f (x1, ..., xm+k) = (x1, ..., xk).
Figure 1.5: The tangent and the perpen-dicular spaces. Here, the tangent spaceis spanned by the vectors v1 = ∂ψ
∂x1(0)
and v2 = ∂ψ∂x2
(0).
3 Hint to Exercise 1.1. The vectors ∂ψ∂xi
(0)are the first m column vectors in the in-vertible Jacobi matrix of Ψ at x = 0. Bythe equation 1.1, the vectors ∂ψ
∂xi(0) span
Tx M.
differential of f at x is an epimorphism for every point x in the inverseimage of y. By the Sard theorem,1 almost every point in the target isa regular value of f . On the other hand, by the Rank Theorem,2 theinverse image of a regular value is a manifold in Rm+k.
The restriction ψ = Ψ|V ∩Rm of the diffeomorphism Ψ in the defini-tion of a submanifold is called a coordinate chart on M. A coordinatechart ψ = ψ(x) locally parametrizes the submanifold M by means ofm parameters x = (x1, ..., xm). In particular, for any function f on M,e.g., for f : M → Rn with n ≥ 0, the composition f ψ is a function interms of (x1, ..., xm); it is called the coordinate representation of f over thecoordinate chart ψ. A function f on M is smooth if for any coordinatechart ψ, the partial derivatives of all orders of the function f ψ arecontinuous.
Figure 1.4: A curve x(t) and its imageψ x(t).
Consider an arbitrary curve x = x(t) on V ∩Rm passing at the timet = 0 through the origin with velocity vector x(0) = (a1, ..., am). Thenthe corresponding curve ψ(x(t)) on M passes at the time t = 0 throughx = ψ(0). Its velocity vector at t = 0 is
d(ψ x)dt
(0) = a1∂ψ
∂x1(0) + a2
∂ψ
∂x2(0) + · · ·+ am
∂ψ
∂xm(0). (1.1)
Such a vector in Rm+k is called a tangent vector of M at x. The expres-sion (1.1) shows that the space Tx M of tangent vectors at x is a vectorspace spanned by the m vectors ∂ψ
∂xi(0) in Rm+k.
Exercise 1.1. Show that the vectors ∂ψ∂xi
(0) are linearly independent andform a basis for the tangent space Tx M. Conclude that the dimensionof the tangent space Tx M is the same as the dimension of M, i.e., m.3
A vector v in Rm+k at the point x of M is a perpendicular vector if it isorthogonal to the tangent space Tx M. The set of perpendicular vectorsat x also forms a vector space, denoted by T⊥x M. We note that for any

18 elements of surgery theory
4 More precisely, a basis τ1, ..., τk forT⊥x M defines an isomorphism τx byτx(ei) = τi for i = 1, ..., k, where ei isthe standard basis for Rk .
5 Tubular Neighborhood Theorem: If Mis compact, then for small ε, the map exp isa diffeomorphism onto a neighborhood of M.
Figure 1.6: A tubular neighborhood ofa framed manifold M consists of ε-discscentered at points x of M and orthogonalto Tx M.
point x ∈ M, there is a canonical isomorphism Tx M⊕ T⊥x M ≈ Rm+k
of vector spaces.
Choosing a basis for T⊥x M is equivalent to choosing an isomorphismτx : Rk → T⊥x M of vector spaces.4 Suppose that such an isomorphismτx is chosen for each point x. Then for each point x, the image τx(v)of any vector v ∈ Rk is a linear combination
τx(v) = α1(x)e1 + α2(x)e2 + · · ·+ αm+k(x)em+k
of basis vectors e1, ..., em+k of Rm+k. If the coefficient functions αi
are continuous (respectively, smooth) for every vector v, then we saythat the manifold M in Rm+k is continuously (respectively, smoothly)framed. To summarize, a continuous (respectively, smooth) frame on amanifold M is a choice of a basis in each perpendicular vector spaceT⊥x M that changes continuously (respectively, smoothly) with x.
Up to continuous deformations, the set of continuous frames over M isisomorphic to the set of smooth frames over M. For this reason we willturn to smooth frames whenever it is necessary, and use continuousframes otherwise.
Given a (smoothly) framed manifold M with a frame τ, there is anexponential map exp : M × Dε → Rm+k where Dε is the open disc ofradius ε in Rk centered at the origin. The exponential map is definedby exp(x, v) = x + τx(v). For example, when ε = ∞, the open disc Dε
coincides with Rk and the image of x × Dε is actually the perpendic-ular space T⊥x M ⊂ Rm+k. In general, perpendicular spaces T⊥x M andT⊥y M at different points x and y of M may have common points inRm+k. However, if M is compact, then, by the Tubular NeighborhoodTheorem,5 for small ε the exponential map is a diffeomorphism onto aneighborhood of M, called a tubular neighborhood of M. In other words,for small values of ε, the exponential map identifies a neighborhood ofM in Rm+k with a tube M× Dε.
1.2 Cobordisms of framed manifolds
The Pontryagin construction shows that a class in πm+kSk defines a(closed) framed manifold M uniquely up to a cobordism. In fact, thereis a bijective correpsondence between framed manifolds of dimensionm in Rm+k up to cobordisms and pointed maps Sm+k → Sk up to ho-motopy, where cobordisms of m-manifolds in Rm+k is an equivalencerelation which we define next.

stable homotopy groups of spheres 19
Figure 1.7: A manifold with bound-ary, and the collar neighborhood of itsboundary.
6 Hint to Exercise 1.3. Let f : Rm+k →Rm+k be the parallel translation thatbrings M0 to M1. Let j : [0, 1] → [0, 1]be a smooth function that equals 0 fort < ε, increases on the interval (ε, 1− ε)and equals 1 for t > 1− ε. Then
Ft(x) = (1− j(t))x + j(t) f (x)
is a smooth deformation of M0 to M1where t ∈ [0, 1] and x ∈ M0, while thetrace W = (Ft(x), t) of the deforma-tion is a cobordism from M0 to M1. Theframe over W at x is constructed in twosteps. First, one applies dx(Ft) to theframe of M0 at x to get k vectors at Ft(x),and, second, one projects the k vectors toT⊥x W.
Definition 1.2. For a compact subset W in the slice Rm+k × [0, 1] of theEuclidean space Rm+k+1 and for i = 0, 1, let us denote the set of pointsof W on the hyperplane Rm+k × i by ∂iW. We say that the space Wis a cobordism between ∂0W and ∂1W if the complement to ∂0W ∪ ∂1Win W is a manifold in Rm+k+1, and there is some ε > 0 such that
W ∩(
Rm+k × [0, ε))
= ∂0W × [0, ε),
W ∩(
Rm+k × (1− ε, 1])
= ∂1W × (1− ε, 1].
The union ∂W of the two sets ∂iW is called the boundary of W, whileW is called a manifold with boundary. Note that the boundary ∂Whas a nice neighborhood in W, namely the union of ∂0W × [0, ε) and∂1W× (1− ε, 1], called a collar neighborhood. In particular, the boundarycomponents ∂0W and ∂1W are smooth manifolds.
For example, for a manifold M in Rm+k the manifold with boundaryW = M × [0, 1] in Rm+k × [0, 1] is a cobordism between two copiesof M; it is called the trivial cobordism of M. On the other hand, W =
M× [0, 1/2) is not a cobordism between M and an empty set since Wis not compact.
The technical requirement that the boundary of W possesses a col-lar neighborhood is often omitted. However, the existence of collarneighborhoods simplifies proofs. For example, in the presence of col-lar neighborhoods, the cobordism relation is clearly transitive.
Suppose now that the manifold W is framed, i.e., at each point (x, t) ∈Rm+k× [0, 1] on the manifold W there is a chosen frame τ(x,t). Since thevectors in τ(x,t) are perpendicular to T(x,t)W, the frame τ(x,t) restrictedto ∂0W and ∂1W turns the two boundary components into framedmanifolds in Rm+k. Furthermore, suppose that τ(x,t) = τ(x,1) if t is ε-close to 1 and τ(x,t) = τ(x,0) if t is ε-close to 0 for some ε > 0. Then wesay that W is a (framed) cobordism between the framed manifolds ∂0Wand ∂1W.
The framed cobordism relation is an equivalence relation. The equiva-lence class of a framed manifold M will be denoted by [M].
Exercise 1.3. Show that a framed manifold M0 is cobordant to theframed manifold M1 obtained from M0 by a parallel translation.6
Finally, we note that the set of all cobordism classes of closed framedmanifolds of dimension m in Rm+k forms an abelian group. Indeed, ifM0 and M1 are two framed manifolds representing cobordism classes[M0] and [M1], we can use a parallel translation to shift M0 into the left

20 elements of surgery theory
7 If M0 and M1 do not share commonpoints in Rm+k , then we may define thesum [M0] + [M1] to be [M0 ∪ M1] with-out taking parallel translations. How-ever, if the intersection of M0 and M1 isnon-empty, the subset M0 ∪M1 of Rm+k
may not be a submanifold.
Figure 1.8: The inverse to the class of theframed manifold M is the class of the re-flection of M
8 To be more precise, we add collarneighborhoods to the boundary of W,and shrink Rm+k+1 along the (m + k +1)-st direction so that W is a subset ofRm+k × [0, 1).
Figure 1.9: The Pontryagin constructioncan alternatively be described as follows:for each point x ∈ M consider its openε-disc neighborhood Dx in the perpen-dicular space T⊥x M. These discs forma neighborhood U of M. To define themap f |U represent the sphere Sk as thethe disc Dk in which all points of theboundary ∂Dk are identified. The map fsends Dx isomorphically onto Dk in sucha way that the frame vectors τ1, ..., τk inDx at x are send to the standard vectorse1, ..., ek on Dk at 0. Finally the map f isextended over Sm+k by sending the com-plement to U onto the south pole of Sk .
half space L = (−∞, 0)×Rm+k−1 of Rm+k and M1 into the right halfspace R = (0, ∞)×Rm+k−1, and get a new framed manifold M0 tM1
in Rm+k representing the sum [M0] + [M1].7 The so-defined operation(addition) is well-defined: changing representatives in the equivalenceclasses [M0] and [M1] does not change the resulting class [M0] + [M1].
The addition is clearly associative and commutative. The zero is rep-resented by an empty manifold. To construct the inverse of the cobor-dism class of a framed manifold M, place M into L and rotate L inRm+k+1
+ = Rm+k × [0, ∞) along Rm+k−1 till L turns into R. Then theframed manifold M traces a framed cobordism W from M ⊂ L to aframed manifold −M ⊂ R.8 In particular, [M] + [−M] = 0, and there-fore −M represents the negative of [M], see Figure 1.8.
To summarize, we have shown that the cobordism classes of (closed)framed manifolds of dimension m in Rm+k form an abelian group.
1.3 The Pontryagin construction
Pontryagin observed a beautiful relation between framed manifolds Mand homotopy groups of spheres. To see the relation, let us identifythe complement in Sn to its south pole with Rn so that 0 ∈ Rn is thenorth pole of Sn; the south pole ∞ will be the base point of Sn. Let Udenote an ε-tubular neighborhood of a closed framed manifold M ofdimension m in Rm+k. Define f |U to be the map from U to Rk ⊂ Sk
by exp(x, v) 7→ v/(ε− |v|). It takes the manifold M to the north poleof Sk and identifies each fiber Dε of the tubular neighborhood with theEuclidean space Rk ⊂ Sk. Then, define the restriction f |Sm+k \U to bethe constant map to ∞ ∈ Sk. The obtained continuous map f sends thesouth pole of Sm+k to the south pole of Sk, and, therefore, representsan element in πm+kSk. Choosing a different value for ε leads to thesame element in πm+kSk. Thus, every closed framed manifold M inRm+k determines a homotopy class in πm+kSk.
The corresondence [M] → [ f ] is well-defined as cobordant closedframed manifolds M0 and M1 define homotopic maps f0, f1 : Sm+k →Sk. Indeed, the Pontryagin construction applied to a cobordism W ⊂Rm+k× [0, 1] between M0 and M1 results in a homotopy Sm+k× [0, 1]→Sk between f0 and f1.
Conversely, let f : Sm+k → Sk be a smooth representative of an elementin πm+kSk. In view of the Sard theorem, by slightly perturbing the

stable homotopy groups of spheres 21
9 Let us show that dx f |T⊥x M is an iso-morphism of the perpendicular spaceT⊥x M and the tangent space T0Rk . Tobegin with, the differential dx f is surjec-tive since the north pole of Sk is a reg-ular value of f . On the other hand, themap f takes the entire manifold M to 0,and therefore the differential dx f is triv-ial on Tx M. Consequently, the restric-tion dx f |T⊥x M is surjective. Finally, thedimension of the perpendicular spaceT⊥x M is the same as the dimension ofT0Rk , which implies that the surjectivehomomorphism dx f |T⊥x M is actually anisomorphism.
10 We say that a map g is homotopic to hif there is a continuous family of mapsft parametrized by t ∈ [0, 1] such thatf0 = g and f1 = h.
Figure 1.10: A framed manifold M ⊂Rm+k also belongs to Rm+k+1. Its framein Rm+k can be completed by em+k+1 toa frame in Rm+k+1.
map f , we may assume that the north pole of Sk is a regular valueof f . Then the inverse image of the north pole is a manifold M inRm+k ⊂ Sm+k, see Figure 1.9. Furthermore, at each point x in Mthe differential dx f takes the perpendicular space T⊥x M isomorphicallyonto the tangent space T0Rk = T0Sk at the origin. 9 Thus d f composedwith the canonical isomorphism T0Rk = Rk defines a frame on M. Inother words M is a framed manifold. However, the framed manifold Mis not uniquely determined by the class in πm+kSk; choosing a differentrepresentative f of the class leads to a different framed manifold M.
To analyze the indeterminacy, let f0 and f1 be two different smoothrepresentatives of the same element in πm+kSk determining two framedmanifolds M0 and M1. Then f0 is homotopic10 to f1 through a smoothhomotopy ft : Sm+k → Sk parametrized by t ∈ [0, 1]. Define a mapf : Sm+k × [0, 1]→ Sk by f (x, t) = ft(x). We may assume that the northpole of Sk is a regular value of f0, f1 and f , and that the deformation fis trivial when the time parameter is close to 0 and 1. Then, as above,the map f determines a framed manifold W = f−1(0) in Rm+k × [0, 1]with boundary. Furthermore, the boundary of W coincides with theunion of M0 and M1, and the frame of W restricts to the frames of M0
and M1. Thus W is a cobordism between the framed manifolds M0
and M1.
To summarize, we have shown that the homotopy classes in πm+kSk
are in bijective correspondence with the cobordism classes of framedmanifolds.
Futhermore, the sum of cobordism classes of framed manifolds underthe Pontryagin construction corresponds to addition in πm+kSk. Thus,we proved the Pontryagin Theorem.
Theorem 1.4 (Pontryagin). The group of cobordism classes of framed man-ifolds Mm ⊂ Rm+k is isomorphic to the homotopy group πm+kSk.
In the remainder of this section we will describe the stability phe-nomenon, and state the Pontryagin theorem in the form that we dis-cussed in the beginning of the lecture.
A framed manifold in Rm+k is naturally a framed manifold in a biggerspace Rm+k+1; in the bigger space the frame at a point x ∈ M containsthe old k frame vectors in Rm+k and the additional new basis vectorem+k+1. Furthermore, any two cobordant framed manifolds in Rm+k
are also cobordant as framed manifolds in Rm+k+1. Consequently, inview of the Pontryagin theorem, there is a so-called Freudenthal homo-

22 elements of surgery theory
11 Recall that πSm denotes the m-th stable
homotopy group of spheres. It is iso-morphic to the group πm+kSk for anyk > m + 1.
12 A frame τ1, ..., τk at a point p deter-mines a homomorphism of vector spaces
Rk −→ Rk
ei 7→ τi .
The group GLk(R) of homomorphismshas two path compoments; the compo-nent of homomorphisms f with det f >0 and the component of homomor-phisms f with det f < 0. Therefore,each frame τ1, ..., τk can be smoothlydeformed either to the basis e1, ..., ekor to the basis −e1, ..., ek.
Figure 1.11: A cobordism of framedpoints.
morphism πm+kSk → πm+k+1Sk+1. We will see later that it is an isomor-phism provided that k > m + 1 and it is an epimorphism for k > m,see the Freudenthal Theorem 2.4. Thus there is a characterization ofstable homotopy groups of spheres in terms of framed manifolds.
Corollary 1.5 (Pontryagin). The group of cobordism classes of framed man-ifolds Mm ⊂ Rm+k is isomorphic to πS
m provided that k > m + 1.11
1.4 Example: The stable group πS0
The Pontryagin construction identifies the stable homotopy group πS0
with the cobordism group of (closed) framed manifolds of dimension0 in Rk for k > 1. Being compact, such a manifold consists of finitelymany points p, each of which equipped with a frame, i.e., a basis forTpRk ≈ Rk. As parallel translations do not change the cobordism classof a framed manifold (see Exercise 1.3), the exact location of points pis not essential.
A frame at any point p can be smoothly deformed12 into the standardpositive basis e1, ..., ek or the standard negative basis −e1, e2, ..., ek.In particular, every class in πS
0 can be represented by a union of mpositively framed points and n negatively framed points for somem, n ≥ 0. We claim that the homomorphism H : πS
0 → Z given by(m, n) 7→ m− n is well-defined and it is an isomoprhism.
Indeed, a cobordism W between two framed manifolds ∂0W and ∂1Wof dimension 0 is a manifold with boundary of dimension 1, i.e., aunion of finitely many circles and segments. We may discard all thecircles from W, and still have a cobordism from ∂0W to ∂1W. Anyremaining segment in W has two boundary components p and q. Ifboth p and q belong to the same boundary component of W, i.e., eitherboth belong to ∂0W or ∂1W, then the signs of their frames are opposite.On the other hand if p and q belong to the different components of W,then the signs of their frames are the same. This implies that H is well-defined as a map of sets. The disjoint union of two framed manifolds(m, n) and (m′, n′) is a framed manifold (m+m′, n+n′). The equalities
H(m + m′, n + n′) = (m + m′)− (n + n′) = H(m, n) + H(m′, n′)
show, then, that the map H is actually a homomorphism.
The homomorphism H is an epimorphism since every positive integerm is the image of the cobordism class of m positively framed points,

stable homotopy groups of spheres 23
13 The homomorphism H assigns, ofcourse, to the homotopy class of a mapSk → Sk its degree.
while every negative integer n is the image of the cobordism class of nnegatively framed points. Finally, the cobordism class of m positivelyframed points and m negatively framed points is trivial, which impliesthat the homomorphism H is injective. This completes the proof thatH is an isomorphism of the stable homotopy group πS
0 onto Z. 13
1.5 Further reading
We only discussed manifolds of dimension m in Rm+k. These are usu-ally defined in advanced calculus courses, e.g., see Advanced calculusof several variables by C. H. Edwards, JR. In more advanced coursesmanifolds are defined without referring to the ambient space Rm+k,e.g., see the textbook Differential topology by M. W. Hirsch and Anintroduction to differentiable manifolds and Riemannian geometryby W. M. Boothby. Early works of L. S. Pontryagin on stable homotopygroups of spheres include Homotopy classification of the mappingsof an (n+2)-dimensional sphere on an n-dimensional one (1950) andSmooth manifolds and their applications in homotopy theory (1955,1976). Pontryagin applied his construction to compute πS
1 and πS2 . The
Thom’s generalization of the Pontryagin construction can be found inhis excellent paper Quelques propriétés globales des variétés dif-férentiables (1954), which lays the foundation of the cobordism the-ory. The J-homomorphism was defined by G. W. Whitehead in On thehomotopy groups of spheres and rotation groups (1942).
The homotopy theoretic calculation of π3S2 as well as πS1 can be found
in the textbook Topology and geometry by G. E. Bredon [Br93, page465]. It is remarkable that even before the invention of higher ho-motopy groups by E. Cech in Höherdimensionale Homotopiegrup-pen [Ce32] and W. Hurewicz in Beiträge zur Topologie der Defor-mationen [Hu35], Heinz Hopf proved in Über die Abbildungen derdreidimensionalen Sphäre auf die Kugelfläche [Ho30] that there areinfinitely many mutually non-homotopic pointed maps f : S3 → S2.Hopf used the linking number of links f−1x and f−1y for any tworegular values x, y of f to distinguish the homotopy classes of mapsf . Note that if x is the north pole of S2 and y a point near x, thenf−1x and f−1y play the roles of the manifold M and its frame in thePontryagin construction.

Figure 2.1: Steve Smale (b. 1930)https://math.berkeley.edu/ smale/
Figure 2.2: Immersion vs. non-immersion.
2
Immersion Theory
A manifold placed into Rn with possible self-intersection points iscalled an immersed manifold. The 50s and 60s saw a rapid develop-ment of the study of immersed manifolds. Historically, the birth of theImmersion Theory is commonly associated with the works of StephenSmale who classified immersions of spheres, and, in particular, proveda peculiar, counterintuitive statement that the standard sphere S2 inR3 can be turned inside out by a deformation through immersions.The work of Smale was later extended by Hirsch to a classification ofimmersions of arbitrary manifolds.
In this lecture we will give an exposition of a modern approach toclassical theorems of immersion theory, due to Rourke and Sander-son. In the prerequisite section §2.1 we introduce an ambient isotopy,which is a deformation of a manifold in Rm+k. In §2.2 we review thecompression technique of Rourke and Sanderson. Smale-Hirsch the-orem is one of its applications (§99.2.2). Another application of theRourke-Sanderson technique is the Freudenthal suspension theorem(§2.3) which we have discussed in chapter 1. We will conclude thelecture with two examples: the Smale paradox (§99.2.3), and the inter-pretation of stable homotopy groups in terms of cobordism groups oforientable immersed manifolds of dimension m in Rm+1 (§99.2.4).
To put the results of the present chapter into perspective, let’s recallthat according to the Pontryagin theorem, every element of the sta-ble homotopy group πm+kSk is represented by a framed manifold Min Rm+k. We would like to simplify the representing manifold M asmuch as possible. In the present chapter we will use a deformation(ambient isotopy) to bring the manifold M into Rm+k−1 ⊂ Rm+k whenpossible. In later chapters we will attempt to replace M with a sphere

immersion theory 25
1 Let’s take a look at a simple exam-ple of how a smooth vector field turnsinto a differential equation. Supposethat w(x, y) is a vector field on R2
with components (x2 + y, y3), while γ(t)is a curve on R2 with components(x(t), y(t)). Then the velocity vector ofγ(t) has components (x(t), y(t)), andthe differential equation γ(t) = w(γ(t))corresponding to the vector field w(x, y)takes the form
x = x2 + yy = y3
where x = x(t) and y = y(t) are func-tions in t.
2 Existence and Uniqueness Theoremfor first order differential equations.Suppose that the function F is continu-ous. Then the differential equation y(t) =F(t, y(t)) with an initial value y(t0) = y0has a unique solution on the interval [t0 −ε, t0 + ε] for some real number ε < 0.
Figure 2.3: A vector field w and the traceγ(t) of isotopy.
3 In other words, a smooth vector field isa smooth function
w : R×Rm+k → Rm+k ,
w : (t, x) 7→ wt(x).
We may think of wt as of a smooth fam-ily of vector fields parametrized by t.
by performing spherical surgeries on M.
2.1 Ambient isotopy
In this section we will make precise the somewhat vague notion ofa deformation of a manifold in Rm+k. The correct term is actuallyan ambient isotopy. When possible, we will use an ambient isotopyto simplify a framed manifold M in Rm+k by deforming it into theEuclidean hyperspace Rm+k−1.
A smooth vector field w on Rm+k defines a first order differential equa-tion γ(t) = w(γ(t)) with smooth coefficients;1 its solution is a curveγ : R → Rm+k whose velocity vector at the moment t is precisely thevector w at the point γ(t) ∈ Rm+k. Informally, if we imagine thatthe space Rm+k consists of particles, then the vector field w shows thedirection for the flow of the particles, see Fig. 2.3.
We will often assume that the vectors in the vector field w are boundedin length, i.e., there is a positive number l such that |w(x)| < l for allx ∈ M. By the Existence and Uniqueness Theorem2, if the vectors w(x)of the vector field w are bounded in length, then there is a uniquesolution γ(t) = F(x, t) for any initial condition x = γ(0). In otherwords, a vector field defines a one parametric deformation F of theEuclidean space Rm+k:
Ft : Rm+k → Rm+k,
Ft : x 7→ F(x, t),
with F0 being the identity map of Rm+k. It is known that the deforma-tion (or, flow) F(x, t) associated with a smooth vector field is smoothin x and t. In fact, for each moment of time t, the map Ft is a a dif-feomorphism of Rm+k, i.e., a smooth homeomorphism whose inverse isalso smooth.
Note that if we do not require that the vectors w(x) in the vector fieldw are bounded in length, then it may happen that the flow carries apoint x = γ(0) to infinity in finite time, and therefore, the positionγ(t) for large t may not be well-defined.
A smooth time dependent vector field wt smoothly3 associates at eachmoment of time t a vector wt(x) to each x ∈ Rm+k. Again, under theassumption that all vectors wt(x) are bounded in length, there exists a

26 elements of surgery theory
4 Let v0 be a normal vector field overM, and v1 be the vector field obtainedfrom v by projecting each vector v0(x) tothe perpendicular space T⊥x M. The lin-ear deformation of v0 to v1 is the fam-ily of vector fields vt = (1 − t)v0 + tv1parametrized by t ∈ [0, 1].
5 Hint for Exercise 2.1. Note that the dif-ferential dFt of the diffeomorphism Ft isinvertible. In particular, if a vector v(x)is not in Tx M, then the vector dFt(v(x))is not in Ty Mt, where Mt = Ft(M) andy = Ft(x). This implies that normal vec-tor fields over M flow into normal vectorfields over Mt. On the other hand, thedifferential dFt may not preserve the an-gles, i.e., perpendicular vector fields overM may not flow into perpendicular vec-tor fields over Mt.
flow Ft : Rm+k → Rm+k along wt in the sense that for each x the curvet 7→ Ft(x) has velocity wt(Ft(x)).
The flow F of a (possibly, time dependent) vector field is an (ambient)isotopy, i.e., it is a smooth parametric family Ft of diffeomorphismsof Rm+k such that F0 is the identity diffeomorphism. In practice, anambient isotopy is viewed as a parametric deformation of M in Rm+k,as for each moment of time t, the set Mt = Ft(M) is also a manifoldplaced in Rm+k. We even say that Ft is an ambient isotopy of M.However, as the word "ambient" suggests, the flow F actually deformsnot only M, but the entire background space Rm+k.
A smooth (respectively, continuous) normal vector field v on a manifoldM in Rm+k is a function that associates to each point x in M a vectorat x not in Tx M such that the components of the vector v(x) changesmoothly (respectively, continuously) with the parameter x. Project-ing each vector v(x) to the corresponding perpendicular plane T⊥x Mproduces a vector field that is actually perpendicular to Tx M. Everyperpendicular vector field is normal. Not ever normal vector field isperpendicular, but every normal vector field can be linearly deformedto a perpendicular one.4 Exercise 2.1 shows why we prefer to worknot only with perpendicular vector fields.
Exercise 2.1. Under isotopy a manifold with a normal vector fieldflows into a manifold with a normal vector field. On the other hand, amanifold with a perpendicular vector field may not flow into a mani-fold with a perpendicular vector field. 5
Exercise 2.2. Let M be a manifold of dimension m in Rm+k. Supposethat normal vector fields v0 and v1 over M are homotopic throughnormal vector fields. Show that v0 is isotopic to v1, i.e., there is anambient isotopy Ft with t ∈ [0, 1] such that F0 = id, Ft(x) = x for all xin M, and dF1(v0) = v1.
2.2 The Global Compression Theorem
We say that a vector field v along a manifold M in Rm+k is vertical upif for every point x ∈ M the vector v(x) is a positive multiple of thelast basis vector em+k; we regard Rm+k−1 × 0 ⊂ Rm+k as horizontal.
Compression Theorem 2.1 (Rourke-Sanderson). Every normal vectorfield v on a closed manifold M of dimension m in Rm+k with k > 1 can

immersion theory 27
Figure 2.4: A normal frame over M = S1
in R2 can not be vertical up since at theright most point, i.e., at the point (x, y)in M with maximal value of y, the verti-cal up direction is tangent to M. In R3
every vector v(x) can be rotated to thevertical up position.
Figure 2.5: A rotation of v to w.
Figure 2.6: The neighborhood U of Mconsists of δ-discs perpendicular to Mand centered at points x in M. Overeach of the discs we extend w so that itchanges linearly along radial lines fromw(x) at the center x of the disc to em+k atthe boundary of the disc.
be made vertical up by an ambient isotopy of the manifold M and a smoothdeformation of the vector field v through normal vector fields.
The condition k > 1 in the Compression theorem is important. Forexample, the (radial) unit perpendicular vector field v over the stan-dard circle M = S1 in R2 can not be straightened up by an ambientisotopy of M and a deformation of v through normal vector fields.We recommend that the reader proves this fact and finds a straighten-ing up deformation of v in R3 ⊃ R2 before reading the proof of theCompression theorem, see Figure 2.4.
On the other hand, in view of Exercise 2.2 we may prohibit deforma-tions of vector fields in the Compression Theorem: Under the hypoth-esis of the Compression Theorem, there is an ambient isotopy Ft witht ∈ [0, 1] such that F0 is the identity map of Rm+k and dF1(v) = em+k
over F1(M).
Proof. To begin with we deform v into the vector field of unit lengthperpendicular to M. Then each vector v(x) determines a point onthe unit sphere Sm+k−1; namely, if we translate v(x) so that its initialpoint is the origin in Rm+k−1, then its terminal point specifies a pointon the unit sphere Sm+k−1. In other words, the vector field v definesa so-called Gauss map M → Sm+k−1. By the Sard Theorem, almostevery value in the target of the Gauss map is regular. On the otherhand, if k > 1, then regular values are precisely those with emptyinverse image. Thus, if k > 1, then by slightly rotating the manifoldM together with the vector field, we may assume that the image of theGauss map avoids the south pole. That is to say, the vector field v isnever vertical down.
Next we observe that since M is compact, the angle between v(x) andthe vertical direction −em+k is at least ε > 0. Choose a positive realnumber µ < ε, and rotate each vector v(x) in the plane P spanned byv(x) and ek+m in the direction vertically up till its last component ispositive and v(x) has angle at least µ with the horizontal plane. Sucha rotation of the vector field v can be chosen to be through normalvector fields over M. Indeed, the intersection of Tx M with the plane ofrotation P is either a point or a line whose angle with the horizontalplane is at least ε; therefore we stop rotating v(x) before reaching Tx M.Let w denote the smoothing of the rotated unit vector field over M.
The vector field w can be extended over Rk+m so that the angle of wwith the horizontal plane is at least µ and outside a δ-neighborhood

28 elements of surgery theory
6 Note that since the manifold M is com-pact, it lies in a ball of finite radius. Onthe other hand, since the angle of w withthe horizontal hyperspace is at least µ,the flow along w lifts each point by atleast T sin µ units at time T.
7 Hint for Exercise 2.3. To define suchan isotopy, let f be a function on π(M)that assigns to a point π(x) the last co-ordinate xm+k of the point x ∈ M. Asa smooth function on M, the function fadmits an extension to a smooth func-tion on all Rm+k−1. Now, define a vectorfield w on Rm+k by w(x, y) = − f (x)em+kwhere (x, y) ∈ Rm+k−1 ×R. Show thatthe flow of the vector field w is along thedirection ±em+k and brings M to π(M)in time 1.
Figure 2.7: A framed manifold M ⊂Rm+k also belongs to Rm+k+1. Its framein Rm+k can be augmented by em+k+1 toform a frame in Rm+k+1.
U of M the vector field w is vertical up, for some small δ. Indeed, theneighborhood U consists of δ-discs perpendicular to M and centeredat points x in M. Over each of the discs we extend w so that it changeslinearly along radial lines from w(x) at the center x of the disc to em+k
at the boundary of the disc. Finally, we extend w over the rest of Rm+k
by vertical up vector filed, smooth the resulting vector field w, andmultiply it by a bump function with (a very big) compact support.The flow of w isotopes M to a manifold M′ outside U in finite time.6
The modified normal vector field on M′ is vertical up.
The Compression Theorem allows us in certain cases to deform M tothe hyperplane Rm+k−1. Indeed, suppose that a compact manifold Mis equipped with a vertical up normal vector field v. Furthermore,suppose that none of the lines in the direction v intersects M at morethan one point. Then the projection π : Rm+k → Rm+k−1 along em+k
places M into the hyperplane Rm+k−1.
Exercise 2.3. Show that there is an ambient isotopy that moves allpoints of Rm+k in the vertical direction and brings M to π(M). 7
We say that the ambient isotopy of Exercise 2.3 compresses the manifoldM to Rm+k−1.
The Compression Theorem admits various generalizations, which wediscuss in the chapter of additional topics. For example, the Multi-compression theorem asserts that if a manifold M of dimension m inRm+k is equipped with n < k linearly independent perpendicular vec-tor fields v1, ..., vn, then there is an ambient isotopy Ft that straightensthe vectors v1, ..., vn up in the sense that F0 = id and dF1(vi) = ei fori = 1, ..., n.
2.3 The Freudenthal suspension theorem
Recall that the Pontryagin construction identifies the homotopy groupsπm+kSk of spheres with the cobordism classes of framed manifolds Mof dimension m in the Euclidean space Rm+k. Such a manifold M alsolies in a bigger space Rm+k+1. Furthermore, its frame in Rm+k canbe augmented with an additional vector em+k+1 to produce a framein Rm+k+1, see Figure 2.7. In other words, each framed manifold inRm+k may also be considered to be a framed manifold in a biggerspace Rm+k+1. Furthermore, cobordant framed manifolds in Rm+k are

immersion theory 29
8 Freudenthal homomorphism (classicaldefinition): Every map f : Sm+k → Sk
defines the suspension map Sm+k+1 →Sk+1 by taking the poles of Sm+k+1 intothe respective poles of Sk+1 and takingthe longitude through any point x inSm+k homeomorphically into the longi-tude through the point f (x). Takingsuspensions of representatives, gives an-other definition of the Freudenthal ho-momorphism πm+kSk → πm+1Sk+1.
9 To show surjectivity of the Freuden-thal homomorphism, we need to showthat the framed manifold M ⊂ Rm+k+1
is cobordant to a manifold in Rm+k ⊂Rm+k+1 with v being vertically up. Re-call also that isotopies of framed mani-folds as well as deformations of normalvector fields imply cobordisms.
Figure 2.8: The manifold of distinct pairs(x, y) is obtained from the manifold M×M by removing the diagonal x = y.
10 Note that the proof of injectivity of theFreudenthal homomorphism does notfollow immediately from the proof ofsurjectivity. We begin with a framedmanifold M in Rm+k that is zero cobor-dant in Rm+k+1 by means of a framedcobordism W. Of course, we may find aflow F that straightens up the last vectorv of the framed cobordism W, and thenwe can compress W to Rm+k . However ifF displaces M, the resulting compressedcobordism W is a cobordism to zero ofa displaced manifold M, not the originalmanifold M.
still cobordant as framed manifolds in Rm+k+1. In view of the Pon-tryagin construction, the correspondence between framed manifolds inRm+k and Rm+k+1 defines a so-called Freudenthal suspension homo-morphism8 of homotopy groups of spheres πm+kSk → πm+k+1Sk+1.
Theorem 2.4. The Freudenthal homomorphism is an isomorphism for k >
m + 1 and an epimorphism for k > m.
It follows that the homotopy groups of spheres πm+kSk are the samefor a fixed m and k > m + 1. These are stable homotopy groups πS
m.
Proof of the Freudenthal theorem. Suppose that k > m. Recall that a nor-mal frame v1, .., vk+1 on a manifold M in Rm+k+1 is a set of k + 1normal vector fields over M that project to a basis of T⊥x M for eachpoint x ∈ M. In view of the Compression theorem, we may assumethat the (k + 1)-st normal vector field v = vk+1 is vertical up.9
We claim that the manifold M can be rotated slightly in Rm+k+1 sothat any line in the direction em+k+1 intersects M at most at one point.Indeed, for any two distinct points x and y in M, the unit vector w(x, y)in the direction x− y points to a point in Sm+k. Since the dimension ofpairs of distinct points is 2m, and the dimension of the sphere Sm+k isat least 2m + 1, the set of vectors w(x, y) is of measure zero by the Sardtheorem, see Figure 2.8. Therefore by slightly rotating M we may makesure that em+k−1 is not among the vectors w(x, y), which preciselymeans that any line in the direction em+k+1 intersects M at most atone point. Of course, after the rotation v may not be vertically upany more. However, since we may choose the rotation to be arbitrarilysmall, the rotated v can be deformed back to the vertical up position.
Now we may use the vector field v to compress the framed manifoldM ⊂ Rm+k+1 to a framed manifold in Rm+k, see Exercise 2.3. Thecompression can be iterated consecutively using the vectors vk+1, vk, ...as long as the index of the vector vi under consideration satisfies i > m.This proves surjectivity of the Freudenthal homomorphism.
To show that the Freudenthal homomorphism is injective,10 supposethat a framed manifold M ⊂ Rm+k is zero cobordant after applyingthe Freudenthal suspension. In other words, after including M intoRm+k+1 and adding the vector field em+k+1 to its frame, the mani-fold M becomes zero cobordant, i.e., there is a framed manifold W inRm+k+1 × [0, 1] with boundary M ⊂ Rm+k+1 × 0. We know that thelast vector field v in the frame of W restricts to em+k+1 over M. In fact,

30 elements of surgery theory
11 We can extend v vertically up over theslice Rm+k+1 × [0, ε) since, by the defi-nition of a framed cobordism, the onlypoints of W that are in Rm+k+1 × [0, ε)are the points of the collar neighborhoodU.
Figure 2.9: The framed manifold M isplaced in Rm+k which is depicted as thedirection to the right. It is zero cobor-dant in the horizontal space Rm+k+1.The cobordism W itself is a manifoldwith boundary in Rm+k+1 × [0, 1]. If wecan compress W to Rm+k × [0, 1] withoutdisplacing M, then we get a cobordismto zero of the original framed manifoldM in Rm+k .
we may assume that it restricts to em+k+1 over an ε-collar neighbor-hood U of M in W.
Now let us carefully examine the argument in the proof of the Com-pression Theorem. We first deform v over W to a vector field so thatthe last component of each vector v(x) is positive. We may assumethat during the deformation v stays vertically up over the collar neigh-borhood U, see Figure 2.9. Next we extend v to a vector field onRm+k+1 × [0, 1]. We can extend v as in the Compression Theorem sothat v is vertically up outside a neighborhood of W. In addition wemay assume that v is vertically up over the slices Rm+k+1 × [0, ε) andRm+k+1× (1− ε, 1] whose union we will denote by V.11 Then the flowF along the extended vector field is well-defined as the condition thatv ≡ em+k+1 over V prevents the points of Rm+k+1 × [0, 1] from flow-ing out of the region of definition of F. The flow F takes W outside itsneighborhood in a finite time T and therefore straightens up the vectorfield v. Note that all points in U travel the distance T in the directionv = em+k+1. Therefore, if we postcompose the ambient isotopy along vwith translation along −Tem+k+1, then we get a framed cobordism W ′
bounding the original manifold M and such that v is vertical up.
Finally, when k > m + 1, we can use the same argument as in theproof of surjectivity to show that W ′ compresses to a cobordism of Min Rm+k × [0, 1]. Thus, a framed manifold M ⊂ Rm+k is cobordant tozero after the Freudenthal suspension only if it is cobordant to zeroitself.
2.4 Further reading
We borrowed the proof of the Compression Theorem from the originalpaper The compression theorem I [RS01] of C. Rourke and B. Sander-son. The theorem has many interesting applications some of whichare explained in The compression theorem II: directed embeddings[RS01a] and The compression theorem III: applications [RS03]. Wegave one more application here: the Freudenthal theorem.
The original proof of Freudenthal suspension theorem in Über dieKlassen der Sphärenabbildungen. I. Große Dimensionen [Fr38] wasdeemed hard. The modern homotopy theoretic proof is based on theBlackers-Massey excision theorem proved in The homotopy groups ofa triad [BM51]. Recall that in general the Freudenthal homomorphismE is not an isomorphism below the stable range. In the paper On the

immersion theory 31
12 To find the EHP exact sequence,Whitehead observed that E is the ho-momorphism induced by an embeddingSn → ΩSn+1, and therefore E fits the ho-motopy long exact sequence of the pair(ΩSn+1, Sn).
Freudenthal theorem [Wh53], Whitehead fitted E into the so-calledEHP sequence12
· · · → πqSn E−→ πq+1Sn+1 H−→ πq−1S2n−1 P−→ πq−1Sn → · · · .
Promptly James proved in On the iterated suspension [J54] the ex-istence of a similar long exact sequence for an iterated Freudenthalhomomorphism Em : πqSn → πq+mSn+m. Its geometric interpretationin terms of Pontryagin construction can be found in the paper Geo-metric interpretations of the generalized Hopf invariant [KS77] byKoschorke and Sanderson.
The original proof of the Smale theorem appeared in his papers Aclassification of immersions of the two-sphere and The classifica-tion of immersions of spheres in Euclidean spaces, [Sm58, Sm59].Smale’s theorems were generalized by Hirsch in the paper Immer-sions of manifolds[Hi59]. It was observed later that not only immer-sions can be replaced with their formal counterparts. A number ofremarkable discoveries culminated in the so-called homotopy princi-ple (h-principle, for short). Besides the classical reference of Partialdifferential relations [Gr86] by Gromov, we recommend the Introduc-tion to the h-principle [EM02] by Eliashberg and Mishachev.

Figure 3.1: Marston Morse (1892–1977)
3
Spherical surgeries
Under the Pontryagin construction, every element of the homotopygroup πm+kSk is identified with the cobordism class of framed man-ifolds of dimension m in Rm+k. The choice of a representing framedmanifold in the cobordism class is far from being unique, and it is ourgoal to find a simple representative. Our strategy is to begin with anarbitrary (a priory complicated) representative and then use a framedcobordism to simplify it as much as possible.
A general cobordism on a manifold W0 could be overly complex: itis hard to describe such a cobordism and its action on the homotopygroups πiW0. However, we will see that every non-trivial cobordismbreaks into a composition of elementary, so-called spherical cobordisms.A spherical cobordism on a manifold W0 performs a spherical surgeryon W0. A spherical surgery is relatively easy to describe in terms of(locally flat) topological submanifolds of Rm+k which are almost every-where smooth. We will discuss a general Cairns-Whitehead techniqueof smoothing topological manifolds, and apply it to smooth cornersand more complicated singularities produced by an embedded spher-ical surgery.
Next, we will learn how to efficiently encode a spherical surgery interms of a base of surgery. We will determine how a spherical surgeryon a manifold W0 changes its homotopy groups. As a demonstrationof the introduced surgery technique, we will calculate the homotopygroup π3S2 as well as the stable homotopy groups πS
1 and πS2 .

spherical surgeries 33
1 Recall, the differential dx f of theheight function linearly projects thespace TxW ⊂ Rm+k ×R to the last com-ponent.
Figure 3.2: A cobordism W between W0and W1 with two critical points. The tan-gent planes at critical points are horizon-tal.
Figure 3.3: After slightly perturbing Wfrom Figure 3.2, the height function hasonly Morse critical points.
3.1 Surgery and cobordisms
Trivial cobordisms
Recall that a cobordism of framed manifolds of dimension m in Rm+k
is a framed closed manifold W of dimension m+ 1 in Rm+k× [0, 1]. Theprojection f of W onto the last coordinate is a so-called hight function.We say that a point x ∈ W is regular if dx f is surjective, and criticalotherwise.1 Geometrically, the critical points of a height function arethose at which the tangent plane is horizontal, see Figure 3.2.
There is a simple coordinate description of regular and critical points.Namely, by the Rank theorem, in a neighborhood of a regular point,there are coordinates (x1, ..., xm, xm+1) on W such that f (x) = xm+1.On the other hand, after slightly perturbing W, near each critical pointthere are coordinates such that
f (x1, ..., xm+1) = −x21 − · · · − x2
i + x2i+1 + · · · x2
m+1,
see Figure 3.3. The latter statement—which we will not prove here—isknown as the Morse lemma, while the perturbed function is called aMorse function.
The integer i in the coordinate representation of f near a critical pointp may be different for different critical points. It is called the index ofthe critical point. The index of a critical point p does not depend on thechoice of a coordinate chart about p. Note that if p is a critical point off of index i, then p is also a critical point of − f of index j = m + 1− i.
For example, in the Figure below the cobordism has two Morse criticalpoints, the points p1 and p2. At the point p1 the height function f has alocal minimum; in a neighborhood of p1 in appropriate coordinates fcan be written as f (x1, x2) = x2
1 + x22. The index of the critical point p1
is 0. The point p2 is a saddle point. In its neighborhood in appropriatecoordinates the height function has the form f (x1, x2) = −x2
1 + x22. In
particular, the index of p2 is 1.
According to Lemma 3.1, as t changes from 0 to 1, the regular levelsWt = f−1(t), i.e., levels with no critical points of f , change by isotopy.

34 elements of surgery theory
Figure 3.4: The vertically up vector fieldem+k+1 and its projection v to W.
2 Hint to Exercise 3.2 We have defined themap
ϕ : W0 × [0, 1]→W
in the proof of Lemma 3.1 by ϕ(x, t) =Ft(x). The flow F carries points alongthe scaled vector field w. Since the lastcomponent of the scaled vector field w is1, the last component of each point in-creases with velocity 1. Thus, in time t,the map Ft lifts each point of W0 to thehight t. In other words, ϕ(W0 × t) ⊂Wt. Since the flow F−1 along the nega-tive of the scaled vector field w is smoothand brings Wt to W0 we deduce thatϕ|W0 × t is a diffeomorphism. In par-ticular, ϕ identifies W0 × t with Wt.Since ϕ is a homeomorphism and dϕ isof full rank, it follows that ϕ is a diffeo-morphism, e.g., see [Lee13].
Lemma 3.1. Suppose that f has no critical points. Then the cobordism W istrivial, that is there is a diffeomorphism ϕ : W0 × [0, 1] → W that identifiesW0 × t with the t-th level Wt of f for all t.
Sketch of the proof. Consider the vector field em+k+1 in the slice Rm+k×[0, 1] of a Euclidean space. Since the hight function f has no criticalpoints, over W the projection v of em+k+1 to W is never horizontal, i.e.,the last component vm+k+1 of the vector field v is never zero. If wescalar multiply v by the smooth function 1/vm+k+1, then we obtaina vector field w over W with last component 1. The flow F of themanifold W0 along the scaled vector field w carries W0 along W andbrings it to Wt at the time t. In fact, F defines a desired diffeomorphismϕ by taking a point (x, t) to Ft(x).
Note that in the proof of Lemma 3.1 we need to scale the vector field vin order to make sure that for any point x ∈ ∂0W the last coordinate ofthe curve t 7→ Ft(x) increases with speed 1 so that the flow Ft indeedbrings W0 to the t-th level at the time t.
Exercise 3.2. Show that the map ϕ is a diffeomorphism that identifiesW0 × t with Wt. In particular, show that ϕ−1 is smooth.2
Spherical cobordisms
In view of Lemma 3.1 as t increases from 0 to 1 the level Wt essen-tially changes only when t passes a critical value, i.e, the value f (x) ofa critical point x. In appropriate coordinates, the gradient of f in aneighborhood of a Morse critical point is
d f (x1, ..., xm+1) = 2(−x1, ...,−xi, xi+1, ..., xm+1),

spherical surgeries 35
3 Note that if
f (x1, ..., xm+1) = −∑ x2i + ∑ x2
j ,
then d f (x1, ..., xm+1) is
(−2x1, ...,−2xi , 2xi+1 + 2xm+1),
or, in other words, d f (x) = 0 only if x =0.
Figure 3.5: By perturbing W, we may as-sume that each level Wt contains at mostone critical point of the hight function.
4 Hint for Exercise 3.3. Suppose that thehight function on the cobordism W hasn critical points p1, ..., pn. We may stretchRm+k × [0, 1] along the (m + k + 1)-st co-ordinate in such a way that for the newhight function f on W we have f (pi) ∈(i − 1, i). Next we may modify W nearWi by ambient isotopy so that each levelWt near Wi for i = 1, ..., n− 1 is obtainedfrom Wi by a vertical translation. ThenW is a composition of spherical cobor-disms, and it is diffeomorphic to theoriginal cobordism.
5 Near the critical point of index i,in Morse coordinate neighborhood, thecore disc of a spherical surgery consistsof the points (x1, ..., xi , 0, ..., 0), whilethe belt disc consists of the points(0, ..., 0, xi+1, ..., xm+1).
which means that the set of critical points of a Morse function is dis-crete.3 It is even finite, since W is compact. Furthermore, by slightlyperturbing W, we may always assume that each level Wt contains atmost one critical point of f , see Figure 3.5.
Thus, every non-trivial cobordism is a composition of spherical cobor-disms W whose height function has at most one critical point. Under aspherical cobordism, the manifold ∂0W = W0 is modified into a mani-fold ∂1W = W1 by the so-called spherical surgery.
Exercise 3.3. Let W be a non-trivial cobordism such that each level Wt
contains at most one critical point of its hight function. Show that Wis diffeomorphic to a composition of spherical cobordisms.4
Let’s describe the result of a spherical surgery. The projection v ofthe vertical up vector field over W to W is a smooth vector field. It iszero only at the critical point p of the height function since only at thecritical point p the tangent space TpW is horizontal. Let Fv denote theflow along the projected vector field v. The set of points x in W withFv
t (x) → p as t → ∞ is called the core disc of the spherical surgery, seeFigure 3.6. Similarly, the set of points x with Fv
t (x) → p as t → −∞is called the belt disc of the spherical surgery.5 We will see shortly thatthe core and belt discs are indeed discs Di of dimension i and Dj ofdimension j = m = 1− i respectively. The boundary ∂Di is called theattaching sphere of the surgery, while ∂Dj is called the belt sphere. Theattaching sphere Si−1 is a sphere on the level W0, while the belt sphereSj−1 is one on the level W1.
All points on W0 \ Si−1 are carried by the flow Fvt (x) to points on W1 \
Sj−1. The flow of the vector field −v defines the inverse map showingthat the manifold W0 \ Si−1 is diffeomorphic to W1 \ Sj−1. In fact, wemay choose neighborhoods hi and hj of the core and belt spheres sothat the flow defines a diffeomorphism between W0 \ hi and W1 \ hj.Thus, we determined a geometric description of a spherical surgery:up to isotopy the manifold W1 is obtained from W0 by replacing hi
with hj, see Figure 3.7.
To identify hi and hj, we may assume that the unique critical pointp of the hight function is on the level W1/2. Since f has no othercritical points, we already know that all levels Wt for t ∈ [0, 1/2− ε]
are mutually diffeomorphic. The same is true for levels Wt with t ∈[1/2+ ε, 1]. In fact, we may remove f−1[0, 1/2− ε) and f−1(1/2+ ε, 1]from the cobordism W without changing its diffeomorphism type. Tosimplify notation, we will denote the parts of the core and the cocore

36 elements of surgery theory
Figure 3.6: The belt disc Dj is above thecritical point (red), the core disc Di is be-low the critical point (red). The traces ofthe flow F outside the belt and core disc(blue) run from W0 to W1.
Figure 3.7: The handles hi and hj are ingreen. The flow F carries W0 \ hi to W1 \hj.
Figure 3.8: The manifolds W1/2−ε andW1/2+ε.
discs Di and Dj remaining in W by the same symbols, and call theirboundaries the attaching and belt spheres.
The manifolds W1/2+ε and W1/2−ε in a neighborhood of the criticalpoint p are depicted in Figure 3.8. The integral curves of the flow Ft
are perpendicular to the level sets Wt, see Figure 3.9. In particular, thecore disc Di is a disc in the plane (x1, ..., xi, 0, ..., 0), while the cocoredisc Dj is a disc in the plane (0, ..., 0, xi+1, ..., xm+1), see Figure 3.8. Theneighborhood hi of the attaching sphere Si−1 in W1/2−ε is diffeomor-phic to Si−1×Dj. The rest of W1/2−ε flows under Ft to the complementin W1/2+ε to a neighborhood hj of the belt sphere Sj−1. The neighbor-hood hj is diffeomorphic to Di × Sj−1, and W1/2+ε is obtained fromW1/2−ε by removing hi, transferring the remaining part by Ft to thelevel 1/2 + ε, and, finally, attaching hj.
Example 3.4. There is a spherical surgery of index 1 on a sphere S2
that results in a torus, see Figure 3.10. A spherical surgery of index1 removes a neighborhood h1 = S0 × D2 of an attaching sphere S0,and then attaches a handle h2 = D1 × S1, which is a cylinder. If weturn the corresponding cobordism W upside down, then we obtain acobordism corresponding to a spherical surgery turning a torus into asphere S2, see Figure 3.11. Now the spherical surgery is of index 2. Itremoves a neighborhood h2 = S1 × D2 of an attaching sphere S1, andthen attaches a handle h1 = D2 × S0.
Conversely, let W0 be a manifold of dimension m in Rm+k, and let Di
be a disc of dimension i in Rm+k together with j linearly independentperpendicular vector fields v1, ..., vj over Di such that ∂Di is a spherein W0 while all vector fields v`|∂Di are tangent to W0. Suppose that Di
intersects the manifold W0 only along ∂Di. Then, we say that the discDi together with the j perpendicular vector fields is a base of sphericalsurgery. We call Di the core disc.
In view of the exponential map, the disc Di together with the perpen-dicular vector fields v` are often replaced with a so-called embeddedi-handle Hi ⊂ Rm+k which is a thickening Di × Dj of the core disc Di
in Rm+k, see Figure 3.12. In fact, given a base of surgery (Di, v1, ..., vj),we may choose an embedding ψ : Di × Dj → Rm+k of the i-handleHi so that ψ(Di × 0) is the core disc, the i-handle Hi intersects W0
along ∂Di × Dj, and ψ(0 × ei) = εvi for some small real number ε
and every basis vector ei in the standard unit disc Dj ⊂ Rj.
It can be shown that in the presence of a base of spherical surgery,there exists a spherical surgery of W0 to a manifold W1 such that hi

spherical surgeries 37
Figure 3.9: The curves of the flow Ft.
Figure 3.10: A surgery turning a 2-sphere into a torus.
Figure 3.11: A surgery turning a torusinto a 2-sphere.
is given by ∂Hi ∩W0, while W1 is obtained from W0 \ hi by taking itsunion with hj = ∂Hi \ hi and smoothing the corners. To construct thecorresponding spherical cobordism W, we begin with a collar neigh-borhood W0 × [0, 1/2] in Rm+k × [0, 1/2], and attach to it a copy of Hi
in Rm+k × 1/2, see Figure 3.13. The interior of the obtained spaceis a manifold with corners. Its boundary is a copy of a manifold withcorners W1. Finally, we attach to the constructed space the final partW1 × [1/2, 1] in Rm+k × [1/2, 1]. The resulting cobordism
W = (W0 × [0, 1/2]) ∪ Hi ∪ (W1 × [1/2, 1])
is a so-called topological manifold. We can smooth it, and turn W intoa smooth cobordism between smooth manifolds W0 and W1.
Example 3.5. The spherical surgery in Figure 3.10 corresponds to thebase of surgery in Figure 3.14. Note that the base of surgery of index nconsists of a disc Dn of dimension n together with dim W0 − dim ∂Dn
perpendicular vector fields along Dn. The base of surgery of index 1 inFigure 3.14 consists of the disc of dimension 1 as well as 2 perpendicu-lar vector fields. In Figure 3.15, the surgery is of index 2. Therefore thebase of surgery consists of a disc of dimension 2 as well as 1 normalvector field.
3.2 Framed base of surgery
In the previous section we have seen how a base of surgery defines aspherical surgery. However, we are still to answer the question, "Givena base of surgery on a framed manifold, does it correspond to a framedsurgery?" Recall that we are interested in framed surgeries rather thansurgeries as the Pontryagin construction identifies homotopies of mapsof spheres with framed cobordisms rather than cobordisms.
We will see that the answer to the question is negative in general: inorder to define a framed surgery, we need a base of framed surgeryrather than a base of surgery.
We will say that Rm+k = Rm+k×0 is the horizontal space in Rm+k+1
while the last factor in Rm+k+1 will be referred to as the vertical space.Let W0 be a manifold of dimension m in the horizontal space Rm+k ×0 framed by vector fields τ1, ..., τk. Let Di be a disc in Rm+k × [0, 1)which bounds a sphere ∂Di in W0 in such a way that near the boundary∂Di the disc Di is a vertical cylinder ∂Di × [0, ε) in Rm+k × [0, ε). Letτk+1, ..., τk+i be perpendicular vector fields over Di. Suppose that the

38 elements of surgery theory
Figure 3.12: A base of surgery (Di ; vl),as well as its replacement Hi .
Figure 3.13: Construction of the spheri-cal cobordism W: Take a collar neighbor-hood W0 × [0, 1/2]. Attach Hi . AttachW1 × [1/2, 1]. Smooth the corners.
vector fields τ1, ..., τk over ∂Di ⊂ W0 extend to perpendicular vectorfields τ1, ..., τk over Di. Furthermore, suppose that the projection of thedisc Di together with vector fields τk+1, ..., τk+j to the horizontal spaceRm+k is a base of surgery. Then we say that the disc Di together withthe vector fields τ1, ..., τk+j is a base of framed surgery.6
Let π : Rm+k+1 → Rm+k be the projection. Then a base of framedsurgery D = (Di, τ1, ..., τk+j) is a lift of the base of surgery πD =
(πDi, πτk+1, ..., πτk+j). The surgery and cobordism associated with thebase of framed surgery D is constructed as the surgery and cobordismW associated with the base of surgery πD, see Figure 3.13. Further-more, the cobordism W is framed as the vector fields τ1, ..., τk over W0
extend to perpendicular vector over W in, essentially, a canonical way.Namely, we first extend τ1, ..., τk over a collar of W0 in W by trans-lation. Then we extend τ1, ..., τk over the handle Hi as prescribed bythe base of framed surgery, and finally we complete the constructionby observing that there is essentially a unique extension of the vectorfields τ1, ..., τk over W1 × [1/2, 1].
3.3 Reduction of homotopy groups
Recall that an element in the homotopy group πm+kSk is representedby a framed manifold. Furthermore, we have seen that two framedmanifolds represent the same element in πm+kSk if and only if oneframed manifold can be obtained from the other one by performingfinitely many spherical surgeries. In this section we will use sphericalsurgeries to simplify a given framed manifold as much as possible.
To begin with, if a given framed manifold M representing an elementx ∈ πm+kSk is not path connected, we may pick points p and q on dif-ferent components in M and then perform a framed spherical surgeryof index 1 along the attaching sphere S0 = p, q. The resulting framedmanifold still represents the same element x, but has less path com-ponents than the initial manifold M. After finitely many surgeries ofindex 1, the framed manifold M is path connected. If it is not simplyconnected, then there is a circle γ representing a non-trivial elementin π1M. We will see that if a surgery of index 2 along γ exists, then itreduces the fundamental group of M, see Figure 3.15. After the funda-mental group of M is reduced to zero, we move to perform surgeries ofindex 3 along spheres in M representing non-trivial elements in π2M;and proceed by induction.

spherical surgeries 39
Figure 3.14: The base of surgery in Fig-ure 3.10.
Figure 3.15: The base of surgery in Fig-ure 3.11. The curve γ represents a non-trivial element in π1 M. However, afterthe surgery, the manifold is simply con-nected.
6 We assume that the projection of a discDi with vector fields τk+1, ..., τk+j is abase of surgery. To motivate this as-sumption, suppose that W0 consists oftwo round circles of radius 1 on R2 cen-tered at (−2, 0) and (2, 0), framed bya vector field τ1 which is outward nor-mal over one circle and inward normalover the second one. There is a disc D1
in R3 together with vector fields τ1, τ2which satisfy all requirements of a baseof framed surgery except that the discD1 together with the vector field τ2 donot project to a base of surgery. In thiscase the disc D1 together with vectorfields τ1, τ2 only define a framed im-mersed cobordism.
7 Note that the dimension of the cobor-dism W is m + 1. Since the core disc Di
is of dimension n + 1, the belt disc Dj isof dimension (m + 1)− (n + 1) = m− n.The dimension of the belt sphere Sb =∂Dj is one less than m− n.
We need to make sure that a surgery over a given representative ofπn M exists, and that an appropriate surgery indeed reduces the groupπn M. Lemma 11.4 shows that a spherical surgery with attachingsphere ∂Di representing an element x ∈ πnW0 kills the element x anddoes not create new elements in lower dimensional homotopy groupsπiW0.
Lemma 3.6. Let W be a spherical cobordism between W0 and W1 of index n+
1 ≤ m/2, where m is the dimension of the manifolds W0 and W1. Supposethat the attaching sphere of the corresponding surgery represents an elementx ∈ πnW0. Then πiW0 = πiW1 for i < n, while πnW1 is a factor group ofπnW0 by a subgroup containing x.
Proof. Let Sb denote the belt sphere of the surgery; it is of dimensionm− n− 1.7 Note that the complement in W1 to the belt sphere can bedeformed into W0 \ hi 'W1 \ hj, see Figure 3.16. An element of πiW1
with i ≤ n can be represented by a sphere Σ in W1 of dimension i.Since dim Σ + dim Sb < dim W1, we may choose Σ so that it does notintersect Sb and, therefore, can be deformed to W0 \ hi ⊂ W0, see Fig-ure 3.17. When i < n, we may deform to W0 not only representativesof πiW1, but also their homotopies. Therefore, in this range there is awell-defined homomorphism ψ : πiW1 → πiW0.
Similarly, the attaching sphere Sa in W0 is of dimension n. Therefore,every sphere representing an element in πiW0 with i ≤ n + 1 can bedeformed into one in the complement to Sa, and, then, to W1. Sucha deformation is unique up to homotopy if i ≤ n. Thus, in the rangei ≤ n, there is a well-defined homomorphism ϕ : πiW0 → πiW1.
When i < n both homomorphisms, ϕ and ψ are well-defined. Sinceψ = ϕ−1, the homomorphism ϕ is an isomorphism when i < n. Wheni = n, we may still deform any representative of πiW1 to W0, though(possibly) not in a unique way. Therefore, in this case, the homomor-phism ϕ is surjective. The element x is clearly in the kernel of ϕ.
3.4 Examples: Stable homotopy groups πS1 and πS
2
Stable homotopy group πS1 .
In this section we will use spherical cobordisms (as well as the Com-pression Theorem) to calculate πS
1 . In fact, we will show that πS1 is

40 elements of surgery theory
Figure 3.16: A compression of W1 \ Sb toW0 \ hi for the cobordism in Figure 3.11.
Figure 3.17: A sphere Σ in W1 \ Sb andits deformation to W0 \ hi .
Figure 3.18: A curve with ψ = 0 self-intersection points mod 2.
Figure 3.19: The immersed surface W ina neighborhood of a triple point.
isomorphic to Z2.
By the Pontryagin construction, the group πS1 can be identified with
the cobordism group of framed manifolds of dimension 1 in R4. By theCompression theorem, the latter group is isomorphic to the cobordismgroup of oriented immersed 1-manifolds L in R2. We define a mapψ : πS
1 → Z2 by associating with [L] the number of self-intersectionpoints of L mod 2. For example, the curve in Figure 3.18 has 4 self-intersection points, and, therefore, the value of ψ on its cobordism classis zero.
We claim that the homomorphism ψ is well-defined, i.e., if W0 andW1 are two cobordant oriented immersed 1-manifolds in R2, then thevalues of ψ on the cobordism classes [W0] and [W1] are the same. In-deed, suppose that W is an immersed cobordism in R2× [0, 1] betweenW0 and W1. We may perturb slightly the surface W so that the set γ
of its self-intersection points is a union of immersed curves. Indeed,a generic immersed surface W in the 3-dimensional space R2 × [0, 1]may have double and triple points. In a neighborhood of a doublepoint (respectively, a triple point), in an appropriate coordinate chartthe immersed surface W appears as an intersection of two (respectively,three) coordinate planes, see Figure 3.19. Therefore, in both cases, theset of self-intersection points of W in the chart consists of immersedcurves.
The coordinate plane description of double and triple points of W alsoshows that the end points of the curves γ lie on W0 and W1. In fact,the set ∂γ is precisely the set of double points of W0 and W1. Since thenumber of end points of γ is even, we conclude that the parities of thenumbers of double points of W0 and W1 agree.
Since taking the disjoint union of two oriented immersed curves re-sults in adding the number of double points, the map ψ is a homomor-phism. In view of the figure "8" immersed curve, the homomorphismψ is surjective.
Let us show that ψ is injective. To this end, suppose that L is an ori-ented immersed 1-manifold in R2 with even number of double pointsso that [L] belongs to the kernel of the homomorphism ψ. We claimthat L is cobordant to an empty manifold. Indeed, suppose L has ndouble points. Given a double point p of L we may perform two spher-ical surgeries in a neighborhood of p to split off a figure "8" withoutincreasing the total number of self intersection points, see Figure 3.20.In such a way we may split off n figure "8" curves so that the curve

spherical surgeries 41
Figure 3.20: Two spherical cobordisms ofindex 1. Each cobordism of index 1 re-moves a pair of green segments S0 × D1
and then attaches a pair of green seg-ments D1 × S0.
Figure 3.21: A curve obtained from theone in Figure 3.18 after splitting off 4 fig-ure "8" curves.
Figure 3.22: The sign convention.
8 We need to show that if W0 and W1are two cobordant framed links, then theframed manifolds of double points ofπW0 and πW1 are also cobordant
that is left has no self-intersection points, see Figure 3.21.
It is known that a closed curve in R2 with no self-intersection pointsbounds a disc. Thus, we have shown that L is cobordant to the disjointunion of n figure "8" curves. Since n is even and a pair of figure "8"curves is cobordant to zero, we conclude that L is cobordant to zero,and, therefore, the homomorphism ψ is an isomoprhism πS
1 ' Z2.
Unstable homotopy group π3S2.
The Pontryagin construction identifies an element in π3S2 with a cobor-dism class of closed framed manifold of dimension 1 in R3, i.e., witha framed link. By the Compression theorem, a framed link admits anisotopy to a framed link with the second (last) normal vector field be-ing vertically up. We note that there exists a unique orientation of thelink such that at each point of the link the orienting vector followed bythe two vectors of the frame produces a positive basis of R3.
We may assume that the projection π of the framed link L to the hor-izontal plane R2 ⊂ R3 is an immersion with no triple point. To eachdouble point we assign a sign according to the sign convention of Fig-ure 3.22. Define a map ϕ : π3S2 → Z by associating with the framedlink the algebraic number of the double points of its projection, i.e.,the number of double points counted with signs. We may also de-fine ϕ : π3S2 → π2S2 by associating with the cobordism class of L thecobordism class of the framed manifold in R2 of double points D(πL)of πL, where a double point p of πL is framed by the orientationvector of the upper strand of πL passing through p followed by theorientation vector of the lower strand of πL passing through p.
To begin with let us show that the map ϕ is well-defined8. Supposethat W is a cobordism in R3 × [0, 1] between two framed links W0
and W1 such that the frames of W0 in R3 × 0 and W1 in R3 × 1are vertically up. Then by the (relative version of the) CompressionTheorem we may assume that the second vector field of the frameover W coincides with e3. Then the projection of W to R2× [0, 1] alongthe direction e3 is an immersion, which we still denote by π. Again,we may assume that the set D(πW) of points in πW with multiplepreimages is a framed manifold of dimension 1 in R2× [0, 1]. It definesa framed cobordism of D(πL). Therefore ϕ : π3S2 → π2S2 is well-defined.
The map ϕ is a homomorphism since the algebraic number of self-intersection points of a union of two projected links is the sum of the

42 elements of surgery theory
Figure 3.23: The curves αi , βi . The curveα1 comes with k normal vector fields in-herited from the frame of M, as well as aunique unit vector field tangent to M di-rected to the right with respect to a cho-sen orientation of α1.
algebraic numbers of the self-intersection points of the links. Supposethat a framed link L represents an element in the kernel of ϕ. Again, byapplying a spherical cobordism finitely many times, we may split offfrom πL a disjoint union of n positive figure "8" curves, and n negativefigure "8" curves. Therefore, L is cobordant to an empty link.
Finally, the homomorphism ϕ is clearly surjective, which completesthe proof that π3S2 is isomorphic to Z.
Stable homotopy group πS2
We have seen that every element of πS2 can be represented by a framed
surface in R2+k with k > 3. Choose a framed surface M of minimalgenus representing a given element of πS
2 . We claim, then, that M iseither a sphere or projective plane.
Indeed, if the genus of the surface M is g, then it can be constructedfrom a sphere by attaching g handles. Let α1, ..., αg denote the beltspheres of the handles, while β1, ..., βg denote closed simple curves inM that have the properties that βi intersects αi at a unique point atwhich βi and αi are not tangent and βi does not intersect any othercurves β j and αj.
Choose an orientation of each curve γ in the set αi, βi. The curveγ comes with k normal vector fields inherited from the frame of M,as well as a unique unit vector field tangent to M that at each pointx ∈ γ is directed to the right with respect to the orientation of γ. Thusthe curve γ itself represents an element [γ] in the group πS
1 ' Z2. If[γ] = 0, then there is a framed disc D in R2+k bounded by γ ∈ R2+k.Since dim M + dim D < dim R2+k, we may assume that the interior ofthe disc D does not contain points of M. Then, the framed disc D is acore of a spherical surgery on M that decreases the genus of M. Sincewe assume that M is of minimal genus, each class [αi] and [βi] shouldbe non-trivial in πS
1 .
Suppose that M is of genus g > 1. Choose a path from a point inα1 to a point in α2. Let γ ⊂ M be an embedded closed curve thattravels along α1, passes to α2 along the chosen path, traverses α2 andthen comes back to α1 along a path parallel to the chosen one. Wemay choose γ to be embedded by changing, if necessary, the directionin which γ traverses α2. Since [γ] = [α1] ± [α2] is the zero elementin πS
1 ' Z2, there is a spherical surgery on M—along the attachingsphere γ—that reduces the genus of M. Thus, we conclude that thegenus of M is at most g = 1, i.e., the surface M is either a sphere or

spherical surgeries 43
9 Suppose that there are two non-homotopic formal immersionsF, G : M → SO3. Define a mapFG−1 : M → SO3 by sending x toF(x)G−1(x). Then FG−1 does notdeform to the constant map. On theother hand, the map FG−1 is a constantmap over the meridian and the parallelof the torus. Therefore it admits alifting with respect to a double coveringS3 → SO3. Of course, any map froma torus to S3 can be deformed to aconstant map. Thus F deforms to G. It isalso easy to see that a formal immersionF with [α1] = [β1] 6= 0 exists.
10 Alternatively, in order to prove that πS2
is non-trivial, we can use the Pontryagininvariant that associates with a framed(not necessarily connected) manifold Mthe number [α1] · [β1] + · · ·+ [αg] · [βg] inZ2.
torus.
Suppose that M is a sphere. We may use the multicompression the-orem to compress M to an immersed sphere in R3. The proof of theSmale paradox shows that any two immersed spheres in M are reg-ularly homotopic. Therefore we may assume that M is an embeddedstandard sphere in R3. It clearly bounds a framed disc in R3 × [0, 1]and therefore M represents a trivial element in πS
2 .
Suppose now that M is a torus. Again, by the Compression Theorem,we may assume that M is immersed into R3.
Let’s determine the number of different immersions of a torus into R3
up to regular homotopy. By the Smale-Hirsch theorem, immersing Minto R3 is equivalent to constructing a family of injective homomor-phisms Tx M → R3 parametrized by points x in M. In view of thecanonical basis of Tx M given by the unit vectors directed along theparallel and meridian respectively, we may canonically identify eachvector space Tx M with R2. Thus, a formal immersion, is a map thatassociates with each x ∈ M an injective homomorphism ϕ : R2 → R3.Notice that ϕ extends to an isomorphism R3 → R3 by ϕ(e3) = ϕ(e1)×ϕ(e2) where × stands for the vector product. Finally, the correspon-dence x 7→ ϕ defines a map F : M → GL3(R) with image in the pathcomponent of GL3(R) of matrices with positive determinant. Fur-thermore, by the Gram-Schmidt orthonormalizing process, we mayassume that the image of F is in subgroup SO3 of orthogonal matrices.However, up to homotopy, there is only one non-constant map of atorus to SO3.
Exercise 3.7. Show that up to regular homotopy there is only one classof immersions of a torus to R3 with [α1] = [β1] 6= 0. 9
We conclude that the group πS2 is either trivial or Z2. We will see later
that the group πS2 is Z2.10
3.5 Further reading
The study of critical points of a function of n variables was initiatedby Morse in Relations between the critical points of a real functionof n independent variables [Mo25]. Both, the Morse lemma clas-sifying generic critical points and Lemma 3.1 are proved in [Mo25].Handle decompositions of cobordisms proved to be very useful in the

44 elements of surgery theory
Smale’s proof of The generalized Poincaré conjecture in higher di-mensions [Sm60]. Worth mentioning is also the development of thespherical cobordisms in the paper A procedure for killing homotopygroups of differentiable manifolds [Mi61] by Milnor, and in the pa-pers Modifications and cobounding manifolds [Wa60] and A geomet-ric method in differential topology [Wa62] by Wallace.
A highly recommended book on cobordisms is the classic Lectures onthe h-cobordism theorem by Milnor [Mi65]. The computation of πS
1and π3S2 involving an isomorphism π3S2 → π2S2 that we presentedhere are different from how Pontryagin computed these groups. Thepresent computation of πS
2 follows the Pontryagin’s line of reasoning.
In presenting a smoothing technique, we followed the line of reasoningby Cairns in Homeomorphisms between topological manifolds andanalytic manifolds [Ca40] and J. H. Whitehead in Manifolds withtransverse fields in Euclidean space [Wh61], presented in elementaryterms by Pugh in Smoothing a topological manifold [Pu02]. Givena topological manifold M of dimension m in Rm+k, the smoothingprocedure relies on the existence of a tubular neighborhood U of M,which consists of disjoint discs Dx of dimension k. Each disc Dx islinear in the sense that it belongs to a k-dimensional affine subspaceof Rm+k and intersects M at a unique point x. If fact, the discs Dx arerequired to be transverse to M, and, in particular, in a neighborhoodof each point the manifold M is the graph of a Lipschitz function.For topological manifolds that are not locally Lipschitz, the field oftransverse linear discs Dx does not exist, but there still may exist afield of non-linear discs Dx whose union is a topological vector bundleneighborhood of M. It turns out that if dim M ≥ 5, then there isa C0-isotopy of M to a smooth submanifold in Rm+k if and only ifM has a topological vector bundle neighborhood. This is the Kirby-Siebenmann smoothing theorem presented in Foundational Essays onTopological Manifolds, Smoothings and Triangulations [KS77].

Figure 4.1: Hassler Whitney, 1907-1989
4
The Whitney trick
4.1 The Whitney weak embedding and immersion theorems
We say that a smooth map f : M→ Rn is an immersion if the differentialdx f is injective at each point x. An immersion f is an embedding if themap f is a homeomorphism onto image.
One of the first questions that arose in the Immersion Theory wasto determine for a given manifold M the minimal dimension of theEuclidean space that admits an embedding/immersion of M. The firstresults in this direction are due to Hassler Whitney.
Theorem 4.1 (The Whitney weak embedding theorem). Every closedmanifold of dimension m admits an embedding to R2m+1.
In order to prove the Whitney weak embedding theorem, we will usethe Sard theorem asserting that for any smooth map of a manifold ofdimension n into a sphere of dimension at least n + 1, the image of fis of measure zero. The manifold under consideration is STM.
Exercise 4.2. Let STM denote the subset of the space Rm+k ×Rm+k
that consists of pars (x, v) of points x ∈ M and unit tangent vectorsv ∈ Tx M. Show that STM is a manifold.
Proof of the Whitney weak embedding theorem. Let M be a manifold of di-mension m in Rm+k and k > m. We claim that there is a non-zerovector v in Rm+k such that no line in the direction v is tangent to M.Indeed, forgetting the first component in (x, v) defines a smooth map

46 elements of surgery theory
1 We will use both the notation d f and f∗for the differential of f .
STM → Sm+k−1 of a manifold of dimension 2m− 1 into the manifoldof dimension at least 2m. Therefore by the Sard theorem, most of thedirections v are not tangent to M. Choosing a copy of v at each pointof M, defines a normal vector field over M. By rotating the manifoldM together with the vector field v we may assume that the vector fieldv is vertical up.
If k > m + 1, then as in the proof of the Freudenthal theorem, wemay slightly rotate the manifold M in Rm+k so that no line in thedirection v intersects M at more than one point. We may still assumethat the vector field v is normal. Projecting M along v = ek to thehorizontal hyperspace results in a placement of M into Rm+k−1. Theargument can be iterated as long as k > m+ 1 and eventually producesan embedding of M into R2m+1.
Note that in the proof of the Whitney weak embedding theorem, whenk = m+ 1 we still place M into Rm+k in such a way that the vector fieldv = em+k is normal over M, but we may not be able to guarantee thatany vertical line in the direction of v intersects M at a unique point. Inthis case, the projection of M along em+k to the horizontal hyperspaceis an immersion. Therefore, we proved the Whitney weak immersiontheorem.
Theorem 4.3 (The Whitney weak immersion theorem). Every closedmanifold of dimension m admits an immersion to R2m.
4.2 The Whitney trick
The Whitney trick allows one to simplify an immersion of a manifoldof dimension m into R2m. To formulate the Whitney construction wewill need two new notions: transversality and orientation.
Two immersions f : M → Rk and g : N → Rk are said to be transverseif for each x in M and y in N with the same image f (x) = g(y),the sum of spaces f∗Tx M and g∗TyN is the vector space Rk.1 By theTransversality theorem, any pair of immersions can be approximatedby a C∞-close pair of transverse immersions.
Similarly, an immersion f is self-transverse if for all x and y in M withf (x) = f (y), the sum of spaces f∗Tx M and f∗Ty M is all Rm+k. By theTransversality theorem (which we will not prove here), any immersion

the whitney trick 47
2 Hint to Exercise 4.4. Suppose thatf (x) = f (y) for two distinct points x andy. Since f is self-transverse, the affinespaces f∗Tx M and f∗Ty M are transverse.Therefore there are no points x′ near xand y′ near y with f (x′) = f (y′). Con-sequently, the set of double points (x, y)in M×M is discrete. Compactness of Mimplies now that the set of double points(x, y) is finite.
Figure 4.2: Not a self-transverse immer-sion.
Figure 4.3: A self-transverse immersion.
Figure 4.4: An oriented manifold withboundary and the orientation of itsboundary.
f admits an approximation by a close self-transverse immersion.
A self-transverse immersion is often easier to work with.
Exercise 4.4. A double point of an immersion f of a manifold M is apair of distinct points x and y in M with f (x) = f (y). Show thatif the manifold M is closed, then the set of double points (x, y) of aself-transverse immersion f of M into R2m is finite.2
Any pair of embeddings can be approximated by a C∞-close pair oftransverse embeddings. Two transverse manifolds of dimensions mand n respectively in Rk meet along a manifold of dimension m+n− k.For example two transverse manifolds of dimension m in R2m meetalong a discrete set of points.
A priori a self-transverse map f of a manifold M of dimension m intoR2m may have triple points, i.e., tuples x, y, z of distinct points in Mwith the same image. However, for a small closed disc neighborhoodD about z, we may slightly modify the immersion f over the interiorof D so that it is transverse to the set of double points of f . Sucha modification eliminates the triple point. Therefore, we may alwaysassume that an immersion of a manifold of dimension m into R2m doesnot have triple points.
Definition 4.5. An orientation of a manifold M of positive dimension ata point x ∈ M is an equivalence class of bases of Tx M. Given two basesei and gi of Tx M, we have gi = ∑ aijej. The bases are equivalent ifthe determinant of the matrix aij is positive. Otherwise we say thatei and gi define opposite orientations. An orientation on M is acontinuous choice of an orientation at each point of x. If M is oriented,then a basis of Tx M is said to be positive if it agrees with the orientationof M; otherwise it is negative.
We also adopt the convention that an orientation of a point is a sign.Thus, there are two orientations on a point: the positive and the nega-tive ones.
A manifold may not admit an orientation; the projective plane is sucha manifold. On the other hand, if a manifold admits an orientation,then it admits precisely two orientations.
Definition 4.6. Suppose W ⊂ Rm+k × [0, 1] is an oriented manifoldwith boundary. Then the orientation on W induces an orientation on∂W: a basis e1, ..., em at x ∈ ∂iW is positive if w, e1, ..., em is a pos-

48 elements of surgery theory
Figure 4.5: The standard orientation ona disc induces counterclockwise orienta-tion on the circle boundary. Note thatthe induced orientation on the bound-ary of a manifold does not depend onthe way the manifold with boundary isplaced in Rm+k × [0, 1].
3 Note that the convention on the ori-entation of the boundary is chosen sothat it agrees with the Stocks formula∫
∂W w =∫
W dw, with the simplicialboundary formula
d[a0, ..., an] = (−1)i ∑[a0, ..., ai , ..., an],
and with the behaviour of fundamentalclasses under the boundary homomor-phism Hm+1(W, ∂W)→ Hm(∂W).
Figure 4.6: The intersection points p andq of opposite signs. There is a curve LMin M from p to q, and a curve LN in Nfrom q to p.
4 If the interior of the disc D is trans-verse to, say, M, then the intersec-tion set has dimension dim D+dim M−dim Rm+n = 2− n < 0.
itive basis at x ∈ W with respect to the orientation on W, where w isan outward directing vector normal to Rm+k × i.3
For example, an orientation on a segment essentially is a choice of aninitial point p and a terminal point q. The terminal point q is positive,while the initial point is negative, see Fig. 4.4. The standard orientationof a circle in R2 is counterclockwise, see Fig. 4.5.
Let M and N be two oriented manifolds of dimensions m and n respec-tively in Rm+n. At their intersection point x choose a positive basis eiof Tx M and a positive basis gi of Tx N. We say that the intersectionpoint x of M and N is positive if e1, ..., em, g1, ..., gn is a positive basisof Rm+n; otherwise the intersection point is said to be negative. Notethat if both dimensions m and n are odd, then an intersection point xof M and N is positive if and only if it is negative as an intersectionpoint of N and M. If m or n is even, then the order of M and N is notessential.
In the presence of two intersection points p and q of opposite signs,Whitney devised an isotopy of M eliminating the pair of intersectionpoints in M ∩ N. Suppose that there is a simple curve LM in M fromp to q and a simple curve LN from q to p in N. Suppose that there is adisc D in Rm+n bounded by LM ∪ LN such that the interior of D is dis-joint from M ∪ N. Then there is an isotopy that pulls a neighborhoodof LM in M along the disc D past LN . It eliminates the pair p and q ofintersection points.
Theorem 4.7 (The Whitney trick). Let M and N be compact orientedconnected transversely intersecting manifolds of dimensions m, n > 2 inRm+n. Let p and q be a positive and negative intersection points. Thenthere exists an ambient isotopy ht with t ∈ [0, 1] such that h0 = id andh1M ∩ N = M ∩ N − p, q.
Proof. Since the manifold M is connected, there is a curve LM in Mfrom p to q. Since the dimension of the manifold M is at least 3, wemay assume that LM is an embedded curve in M. Similarly, there isan embedded curve LN in N from p to q, see Figure 4.6. The union ofcurves LM ∩ LN is an embedded closed curve in Rm+n, which boundsa disc D of dimension 2. We may assume that the disc D is nowheretangent to M and N. Choosing D so that its interior is transverse to Mand N insures that the interior of D has no points in M and N. 4
We aim to push a neighborhood U of the curve LM in the manifold

the whitney trick 49
Figure 4.7: The union of curves LM ∪ LNbounds a disc D. Its thickening is de-noted by H.
Figure 4.8: The vector field v′m−1 mayagree with the vector field vm−1.
Figure 4.9: The vector field v′m−1 may notagree with the vector field vm−1. Thedark strip in the Figure is a part of thedisc D.
M along the disc D past LN . We will first push the manifold M alongthe disc D randomly to investigate the obstruction to the existence of aWhitney isotopy. Then we will carefully construct the Whitney isotopyfrom scratch.
The trace of the flow of U under an isotopy along D is a thickeningH of D. In order to describe H, extend the curve LM slightly past itsendpoints so that p and q are interior points in LM, and then pick vec-tor fields v1, ..., vm−1 over extended LM such that at each point x ∈ LM
the vectors v1(x), ..., vm−1(x) form an orthonormal basis of the sub-space in Tx M perpendicular to TxLM. Then extend the disc D so thatD intersects M only along its boundary and D ∩ M = LM. Further-more, ∂D \ LM is a curve in the complement to M and N. Next weextend the vector fields v1, ..., vm−1 to perpendicular vector fields overthe disc D. There exists a thickening H = D× Dm−1
ε of the disc D inRm+n prescribed by the vectors v1, ..., vm−1 in the sense that for eachpoint x ∈ D, the coordinate vectors 0 × ei in the tangent space tox × Dm−1
ε coincide with the corresponding vectors vi at x, and suchthat the subset LM × Dm−1
ε of H coincides with U, see Figure 4.7 andLemma ??.
The boundary of the thickening H of D consists of U and ∂H \U. Wemay push U relative its boundary through H to the position ∂H \U.We can slightly change the pushing so that it is smooth and defines anisotopy. Then the result M1 of the isotopy of M is obtained from themanifold M by replacing U with ∂H \U and smoothing the corners.We need to make sure that M1 ∩ N = M ∩ N − p, q. Clearly, allintersection points in M ∩ N except for p and q remain in M1 ∩ N.Furthermore, the points p and q are no more in the intersection M1 ∩N. Thus we only need to make sure that the new part ∂H \U has nopoints in N. If the thickening H = D × Dm−1
ε of D is thin enough,meaning that the radius ε of the disc Dm−1
ε is small enough, then theonly common points of ∂H \U and N could be in a neighborhood ofD ∩ N = LN . On the other hand, if we can choose the vector fieldsv1, ..., vm−1 over D so that their restrictions to LN are perpendicular toN, then clearly ∂H ∩ U would have no common points with N in aneighborhood of LN .
Let’s construct the vector fields vi with required properties from scratch.To begin with, we define the vector fields vi over LM. Next we aim toextend them over LN in such a way that for each point x ∈ LN , the vec-tors v1(x), ...vm−1(x) form a basis for the subspace of dimension m− 1in TxRm+n that is perpendicular to the space Tx N⊕ TxD of dimensionm + 1. We can easily extend vector fields v1, ..., vm−2 by induction, but

50 elements of surgery theory
5 Here is a sketch of a proof that anynormal linear independent vector fieldsv1, ..., vm−1 over ∂D ⊂ Rm+n admit anextension over D. To begin with we notethat if there is an isotopy that brings Dto a disc D′ and vector fields vi to vectorfields v′i over ∂D′, then it suffices to ex-tend vector fields v′i over D′ since we canthen use the inverse isotopy to bring theextended vector fields back to D. Thuswe can freely change D and the vectorfields vi by isotopy. In particular, wecan apply the inductive argument in theFreudenthal theorem. First, by generalposition we can extend vi over D, usethe Compression Theorem to straightenvi up, and compress D to Rm+n−1. Thenwe continue by induction to extend andstraighten all other vector fields.
Figure 4.10: The sphere S of dimen-sion m in R2m with a unique intersectionpoint is constructed by taking two discsDm, connecting their boundaries with acylinder C, and smoothing the corners.
when it comes to extending the last vector field vm−1 a bit more careis necessary. Let v′m−1 denote the unique unit vector field over LN per-pendicular to N, to D, and to vector fields v1, ..., vm−2 and such thatv′m−1(p) = vm−1(p). Then v′m−1(q) = ±vm−1(q), see Figures 4.8 and4.9. Since by the hypothesis in the theorem the signs of p and q areopposite, we deduce that v′m−1(q) = vm−1(q), and therefore, we mayextend the vector field vm−1 over LN by v′m−1.
Exercise 4.8. Show that v′m−1(q) = vm−1(q).
Finally the vector fields v1, ..., vm−1 can be extended to perpendicularvector fields over D. 5
Exercise 4.9. Let M and N be closed oriented connected immersedmanifolds of dimensions m > 2 and n > 1 in Rm+n. Suppose thatM and N intersect transversally. Let p and q be intersection points inM ∩ N. Then there is a regular homotopy ht with t ∈ [0, 1] of M suchthat h0 = id and h1M ∩ N = M ∩ N − p, q.
4.3 Strong Whitney embedding theorem
We have seen that every closed manifold M in Rm+k is isotopic toa manifold in R2m+1. Furthermore, it admits a compression to R2m
into an immersed manifold with finitely many double points. In thissection we will show that the manifold M admits an embedding intoR2m. We will begin with an immersed manifold M in R2m. Near eachof the double points of M we will construct an immersed sphere witha unique double point. Using a surgery we will merge the sphereswith M without changing the diffeomorphism type of M. Then bythe Whitney trick, each of the original double points can be eliminatedwith a double point in one of the merged spheres.
To construct an immersed sphere in Rm ×Rm, let D1 and D2 be thetwo unit discs in Rm × 0 and 0 ×Rm. There is a rotation ht, witht ∈ [0, 1] of Rm ×Rm that takes each vector v × 0 into the vector0 × v and each vector 0 × v into the vector −v × 0. The traceht(∂D1) of ∂D1 under this rotation is a cylinder C, which together withD1 and D2 forms a sphere with corners in R2m. After smoothing thecorners we obtain a desired sphere S of dimension m immersed intoR2m with a unique double point. When m is even, the sign of thedouble point is well-defined. We may obtain an immersed sphere with

the whitney trick 51
Figure 4.11: Removing a self-intersectionpoint
6 If the signs of the intersection points pand q are the same, then we may changethe sign of q by slightly modifying theconstruction. Namely, if m is odd, thenwe only need to reorder the two discs ofM′ near q. If m is even, then we may re-place S with ϕ(S) where ϕ : R2m → R2m
is any orientation reversing diffeomor-phism.
a unique double point of opposite sign by applying an orientationreversing diffeomorphism ϕ : R2m → R2m. Namely, the sign of theself-intersection point of ϕ(S) is opposite to that of S.
Theorem 4.10 (Strong Whitney embedding theorem). Every closed con-nected manifold M of dimension m admits an embedding into R2m.
Proof. If m ≤ 2, then we may construct an explicit embedding of Minto R2m. Suppose that m ≥ 3 and choose a self-transverse immer-sion of M into R2m with the least possible number of self-intersectionpoints. Let x be a self-intersection point of M.
In the complement to M in Rm+k we place an immersed sphere S witha unique self-intersection point y, see Figure 4.11. Next we choosea path from a point on S to a point on M and perform a 1-surgeryon M t S along the path. The obtained immersed manifold M′ isdiffeomorphic to M, but it has an additional self-intersection point y.
Near the points x and y the manifold M′ consists of two discs whichwe order arbitrarily. Choose a path LP on M′ which starts from xfollows along the first disc and terminates at y along the first disc.Similarly, choose a path LQ on M′ from x which traverses the seconddisc near x and terminates at y along the second disc. Let P denotea ε-neighborhood of LM in M′ and let Q denote a ε-neighborhoodof LQ in M′. The manifolds P and Q intersect at two points p andq. We may assume that the signs of the intersection points p and qare opposite,6 and therefore there is a Whitney trick that isotope Pinto P1 such that P coincides with P1 near ∂P and P1 has no commonpoints with Q. Then the immersed manifold (M \ P) ∪ P1 has fewerself-intersection points than M contrary to the assumption. Thus, Madmits an embedding.
4.4 Strong Whitney immersion theorem
The strong Whitney immersion theorem improves the least dimensionof the Euclidean space into which M admits an immersion.
Theorem 4.11 (The Whitney strong immersion theorem). Every orientedclosed manifold M of dimension m admits an immersion into R2m−1.
Proof. Again we may assume that m > 2. By the strong Whitney

52 elements of surgery theory
embedding theorem, we may assume that M is embedded into R2m.Choose a vector field v over M in R2m such that at each point x ∈ M,the vector v(x) is perpendicular to Tx M; we allow v(x) to be zero. Theend points of v define a copy M′ of M. By the Transversality theoremwe may assume that M′ is transverse to M.
Since the manifolds under consideration are closed, there are onlyfinitely many intersection points in M ∩ M′; and since the manifoldsare oriented, each intersection point comes with a sign. We claim thatthe algebraic number of intersection points—i.e., the number of in-tersection points counted with signs—- is 0. Indeed, the immersionf = F0 extends to a regular homotopy Ft : M′ → R2m such that F1 is amap with image in a far away ball disjoint from M. For example, wemay choose F to be the composition of a trivial isotopy for t ∈ [0, ε),a parallel translation of M′ to a far away ball in the period of time[ε, 1− ε], and a trivial isotopy for t ∈ (1− ε, 1]. The regular homotopyFt defines a map
F : M′ × [0, 1] −→ R2m × [0, 1]
by associating (Ft(x), t) with (x, t). Furthermore, slightly perturbing F,we may assume that it is an immersion transverse to M× [0, 1]. ThenF−1(M) is an oriented manifold of dimension 1 with boundary. Sinceall the boundary points are the intersection points in M ∩ M′, theiralgebraic number is zero.
By the Whitney trick, we may assume now that the immersed mani-folds M and M′ are disjoint. In other words, we may assume that theperpendicular vector field v over M is nowhere zero. The Compressiontheorem straightens v vertically up, after which the projection of M tothe horizontal hyperplane R2m−1 defines a desired immersion.
The Whitney strong immersion theorem can be slightly improved.
Theorem 4.12. Let f : M→ N be a smooth map of an oriented closed mani-fold M of dimension m to an oriented manifold N of dimension 2m− 1. ThenM is homotopic to an immersion. If the map f is already an embedding overan open subset U ⊂ M, then the homotopy of f to an immersion can be cho-sen to be trivial over U, i.e., we may choose a homotopy that modifies f onlyoutside U.
Proof. We may first postcompose the map f with an inclusion i of Nto N ×R. Then, by the Whitney strong embedding theorem, we maymodify the obtained map into an embedding M → N ×R. Next, as

the whitney trick 53
7 To begin with we construct a genericvector field v over M in T(N ×R) per-pendicular to M. If the manifold N ×R
is in Rn+k × R, then the tips of thevector field v define a manifold M′ inRn+k ×R. It can be projected to a man-ifold in N ×R which we also denote byM′. We note that the manifold M′ canbe translated in N×R away from M andtherefore the algebraic number of inter-section points of M and M′ is zero. TheWhitney trick allows us to make M andM′ disjoint. The manifold M′ now de-fines a new nowhere zero vector field vover M perpendicular to M in N ×R.
in the proof of Theorem 4.11, we find a nowhere zero vector field vperpendicular to M in N ×R.7 The compression theorem now allowsus to compress the embedded manifold M ⊂ N ×R to an immersedmanifold in N.
4.5 Solution to Exercises
Solution to Exercise 4.8. Recall that LM is a slightly extended curve onM from p to q, LN is a slightly extended curve on N from p to q.We have constructed vector fields v1, ..., vm−2 over LN ∪ LM as well asvector fields vm−1 over M and v′m−1 over LN . Let vm be the velocityvector field of LM. We may assume that (v1(x), ..., vm(x)) is a positivebasis for Tx M for every point x ∈ LM. Let η1, ..., ηn−1 be vector fieldsover LN perpendicular to LN and tangent to N. Let ηn be the velocityvector field of LN . We may assume that (η1(x), ..., ηn(x)) is a positivebasis for Tx N for all x ∈ LN . Finally, let d be a vector field over LN
tangent to D orthogonal to LN and such that d(p) = v(m). Thend(q) = −v(m).
At each point x in LN there is a basis for TxRm+n :
b = (v1, ..., vm−2, v′m−1, d, η1, ..., ηm).
Indeed, the vector fields η1, ..., ηm span the tangent space Tx N, the vec-tor fields ηm and d span TxD, while the other vector fields span thevector space in TxRm+n perpendicular to Tx N and TxD. We note thatthe basis is positive. Indeed, at the point p we have v′m−1(p) = vm−1(p)and d(p) = vm. Thus, the basis b is composed of the positively ori-ented basis for Tp M followed by the positively oriented basis for TpN.Since the intersection point p is positive, this implies that the basis bis positive.
On the other hand, at the point q we have d(q) = −vm(q). Since theintersection point q of M and N is negative this implies that v′m−1(q) =vm−1(q).
4.6 Further reading
The Whitney trick theorem originally appeared in the paper The Self-intersections of a smooth n-manifold in 2n-space (in 1944) by Whit-ney. Theorem 4.1 was proved by Whitney [Wh35] in 1935. There is

54 elements of surgery theory
a nice presentation of the theorem in Lectures on the h-cobordismtheorem by J. Milnor [Mi65].

Figure 5.1: Michel Kervaire, 1927–2007
5
The Kervaire invariant and signature
In this chapter we continue our study of homotopy classes of pointedmaps Sm+k → Sk with k > m + 1. These are identified with cobor-dism classes of framed manifolds M of dimension m in Rm+k. Weaim to simplify the representing manifolds M as much as possible bymeans of framed surgeries, which, we know, correspond to framedcobordisms.
In fact, we will see (Theorem 5.7) that a framed manifold M of di-mension m ≥ 5 can be simplified by induction. To begin with, if themanifold M is not path connected, its distinct path components canbe connected by means of framed surgeries of index 1. We may pro-ceed by induction. Namely, when the manifold M is (i− 1)-connected,where i < m/2, each generator x of the homotopy group πi M can berepresented by an embedded sphere S. A spherical surgery with at-taching sphere S kills the generator x. Thus, finitely many appropriatespherical surgeries of index i + 1 along generators of πi M result in aframed i-connected manifold. The inductive process results in a man-ifold M with trivial homotopy groups in degrees < m/2.
When m = 2q+ 1 is odd, an additional step for i = q is possible to per-form yielding a q-connected manifold M. By Poincare Duality, such amanifold M is actually (m− 1)-connected, and, in fact, homeomorphicto the sphere Sm (Theorem 5.10).
When m = 2q is even, for each generator x ∈ πq M we will choose aspecial representing sphere S in M, called the Wall representative of x,and count the algebraic number µ(x) of self-intersection points of S. Aspherical surgery along a sphere representing x is possible if and onlyif µ(x) = 0 (Theorems 5.3, 5.4). Of course, as in the computation of πS
2 ,

56 elements of surgery theory
1 It is known that the signature of aframed manifold is always zero. Thus,we will see that a framed manifold Mof dimension 2q with q even is alwayscobordant to a framed homotopy sphere,while a framed manifold of dimension2q with q odd is cobordant to a framedhomotopy sphere if and only if its Ker-vaire invariant is zero.
2 We will discuss in Remark 5.5 the casesm ≤ 4.
Figure 5.2: The (red) disc D′ bound-ing (black) sphere S′. The (blue) man-ifold M is equipped with vector fieldsτ1, ..., τk , which define a tubular neigh-borhood (dark grey) M× Dk of M. Thedisc D′ is equipped with perpendicularvector fields v1, ..., vm−q+1.
3 We can start with a not necessarily em-bedded sphere S′ representing x in Mand then perturb it in a tubular neigh-borhood of M so that it is embedded.Here we essentially use the assumptionthat k is sufficiently big.
4 Since the dimension of D′ is q + 1, andit lies in Rm+k+1, the number of framevector fields over D′ is m− q + k.
if the values of µ on two generators α1 and α2 are non-zero, we maystill attempt to perform a surgery on a sphere representing α1 ± α2. Inother words, in order to be able to kill all homotopy elements in πq Mwe only need that certain invariants of µ are trivial rather than µ ≡ 0.The invariants of interest are the signature and Kervaire invariant of M.When these invariants are trivial, the framed manifold M is cobordantto a framed homotopy sphere. 1
5.1 The Wall representative and the invariant µ
To construct Wall representatives we will essentially use the Multicom-pression theorem (see Theorem 99.4), which asserts that all but oneframe vectors of a framed manifold can be straightened up by meansof an ambient isotopy.
Theorem 5.1. Suppose that the manifold M of dimension m in Rm+k isequipped with n < k linearly independent perpendicular vector fields v1, ..., vn.Then there is an ambient isotopy Ft with t ∈ [0, 1] that straightens the vectorsv1, ..., vn up in the sense that F0 = id while dF1(vi) = ei for i = 1, ..., n.
Now, let M be a manifold of dimension2 m ≥ 5 in Rm+k, with k suf-ficiently big, equipped with a frame τ1, ..., τk, and let x be an elementin the homotopy group πq M in the range q ≤ m/2. Our goal is todetermine when there is a spherical surgery along an attaching sphererepresenting x. Such a surgery would reduce the homotopy groupπq M.
In view of the k-frame τ1, ..., τk over the manifold M, we may use theexponential map to identify a tubular neighborhood of M with M ×Dk. We note that under the exponential map, the vector fields τ1, ..., τk
over M × 0 are identified with the coordinate vector fields in thedirection Dk. In particular, we may extend τ1, ..., τk over the tubularneighborhood by the coordinate vector fields in the direction Dk, seeFigure 5.2.
By the Whitney embedding theorem, there is a an embedded sphereS′ in M × Dk representing the element x in πq M ≈ πq(M × Dk). 3
We will identify the space Rm+k in which M× Dk is located with thehorizontal subspace Rm+k×0 in Rm+k+1. Then there exists a uniqueup to isotopy disc D′ in Rm+k × [0, 1] of dimension q + 1 that boundsS′, see Figure 5.2. Choose an orthonormal frame v = vi of D′; byExercise 5.2 the choice of the frame of D′ is essentially unique.4

the kervaire invariant and signature 57
5 Hint to Exercise 5.2 At a point x in D′,the frame v′ is obtained from the framev by a rotation ϕ(x). The correspon-dence x 7→ ϕ(x) is a continuous mapD′ → SO(n) into the group of rotations,where n is the number of vectors in theframe v. The contraction of ϕ to the con-stant map that maps each point of D′ to1 ∈ SO(n) defines a deformation of v′ tov. More precisely, if ϕt : D′ → SO(n) isa homotopy of ϕ0 = ϕ to the constantmap ϕ1 to 1 ∈ SO(n), then ϕtvi is thehomotopy of v′i to vi.
6 A particular choice of a disc D isnot relevant, since any immersed discbounded by S is regularly homotopic toany other immersed disc bounded by Swhenever the dimension k is sufficientlybig. Furthermore, the regular homotopycan be chosen relative to S.
7 Note that the frame of S consists of twotypes of vectors: the vectors v1, .., vk thatare perpendicular not only to S, but alsoto M, and the vectors vk+1, ..., vm−q+kthat are perpendicular to S and tangentto M.
Exercise 5.2. Show that every orthonormal frame v′ = v′i over D′
can be continuously deformed to the frame v = vi through orthonor-mal frames. 5
Next, we will attempt to modify the sphere S′ and the disc D′ as wellas its frame v so that the framed disc D′ is a base of framed surgeryand S′ is an attaching sphere in M. To this end, we need to deform S′
back to the manifold M, and we need that τi = vi for the first k vectorfields vi of the frame of the disc D′.
Since the vector fields v1, ..., vk restricted to S′ are perpendicular andlinearly independent, the Multicompression Theorem guarantees theexistence of an ambient isotopy of S′ in Rm+k with support in a smallneighborhood of S′ that slightly perturbs S′ and brings each vector vi
to τi for i = 1, ..., k. The ambient isotopy Ft of S′ in Rm+k extends to anambient isotopy of Rm+k+1 and carries D′ to a disc F1D′ bounded bythe sphere F1S′.
There is a regular homotopy of the sphere F1(S′) that compresses itto its projection S ⊂ M along the vertical disc fibers of the tubularneighborhood of M. We may extend the regular homotopy of F1(S′)over the disc F1D′ and obtain a disc D ⊂ Rm+k × [0, 1] bounded by S.6
Without loss of generality we may assume that the sphere S in M isimmersed and self-transverse. It still represents the homotopy class xin πq M, and has the property that the frame fields τ1, ..., τk of M overS extend to normal vector fields v1 = τ1, · · · , vk = τk over D.
We will say that the inclusion of the sphere S into M is the Wall rep-resentative of x. the Wall representative of a given class x is defineduniquely up to regular homotopy. Note, when S is embedded, it has aframe v1 = τ1, ..., vk = τk, vk+1, ...., vm−q+k which extends over D.7
When the dimension q of the sphere S is even, every self-intersectionpoint of S has a well-defined sign. On the other hand, when q is odd,the sign of a self-intersection point is not well-defined and thereforeany pair of self-intersection points of S can be canceled by the Whitneytrick. Define µ(x) to be the algebraic number of self-intersection pointsof the Wall representative S of x. It is an integer if q is even, and anelement in Z2 if q is odd.
Whether q is even or odd, the invariant µ(x) may be non-trivial only ifm = 2q. Indeed, we assumed that m ≥ 2q. On the other hand, if m <
2q, then any generic immersed sphere S in M is actually embedded.

58 elements of surgery theory
8 A regular homotopy from S0 to S1 isa smooth deformation through immer-sions, i.e., it is a smooth family St of im-mersions with t ∈ [0, 1].
9 More explicitly, the frames v0 and v1
over D define a map f : D → SO(n)which associates with x the rotationfrom v0(x) to v1(x). A deformation ofthe map f to the constant map onto1 ∈ SO(n) defines a deformation of theframe v0 to v1 over D. Such a deforma-tion extends to a deformation of v0 overall S ∪D with support in the union of Dand a collar neighborhood of ∂1S in S.
Figure 5.3: Signs of self-intersectionpoints.
Figure 5.4: The trace S of a homotopyand a disc D.
Theorem 5.3. The class µ(x) is well-defined.
To prove Theorem 5.3, we will assume that there are two Wall represen-tatives S0 and S1 of the class x, and construct a regular homotopy St ofS0 to S1 in M.8 We will observe that throughout the regular homotopythe self-intersection points of the surface St appear and disappear inpairs. Furthermore, when the signs of the self-intersection points arewell-defined the two points in each appearing and disappearing pairare of different signs. This implies that the algebraic number µ(x) ofself-intersection points of S0 is the same as that of S1.
Proof. Since µ(x) = 0 unless m = 2q, we may assume that m = 2q.For i = 0, 1, let Si be a Wall representative of x equipped with a framevi in Rm+k. Slightly perturb each of the spheres with their framingsby isotopy in a tubular neighborhood of M so that each sphere Si isembedded. In fact, in view of the exponential map we may identifythe tubular neighborhood of M with M× Dk and choose the isotopyin such a way that each point x ∈ Si flows along the disc x × Dk.Choose a homotopy of S0 to S1 in a tubular neighborhood of M. Bythe Whitney embedding theorem, we may assume that its trace is amanifold-with-boundary S in Rm+k × [0, 1] with ∂iS = Si, see Fig-ure 5.4. Let D be a disc in Rm+k × [1, 2] bounding S1. Note that theframe v1 over S1 extends to a frame over D. Similarly, the frame v0
over S0 extends over the union S∪D. By Exercise 5.2, we may assumethat v0 agrees with v1 over D.9 Consequently, there is a frame vj overS extending v0 and v1.
Now we may use the vector fields v1, ..., vk to compress S into M ×[0, 1] by means of the Multicompression Theorem. Namely, we mayextend the vector fields τ1, ..., τk over the tubular neighborhood (M×Dk)× [0, 1] by translation, and regard the extended vector fields as thebasis vector fields in the direction Dk of the neighborhood. We mayassume that v1, ..., vk coincide with τ1, ..., τk over a collar neighborhoodof ∂S in S. By the Relative Multicompression Theorem, there existsan ambient isotopy of S in the tubular neighborhood of M that bringsv1, ..., vk to τ1, ..., τk everywhere over S. Furthermore, we may assumethat the isotopy is trivial over a collar neighborhood of ∂S. Hence,after applying the isotopy to S, we may compress S to M and obtainan immersion S → M× [0, 1] that takes its boundary to the union ofS0 and S1.
Let X denote the set of self-intersection points of the compressed man-ifold S in M× [0, 1]. Then X is a manifold-with-boundary of dimen-

the kervaire invariant and signature 59
Figure 5.5: The set D × Dm−q defines anormal spherical surgery on M.
sion 1—i.e., a union of segments and circles—and Xi = ∂iX coincideswith the set of self-intersection points of Si in M × i. We claimthat X defines a framed cobordism between the manifolds of self-intersection points of S0 and S1. Indeed, let x be any point in X. Thenit is at the intersection of two sheets of X. Let vk+1, ..., vk+q denotethe frame vectors at x of S in M × [0, 1] over one of the sheets, andv′k+1, ..., v′k+q be the frame vectors at x over the other sheet. Then thevectors vk+1, ..., vk+q, v′k+1, ..., v′k+q define a frame over X in M× [0, 1].Recall that the signs of self-intersection points of S0 and S1 are definedby means of similar frames. Therefore, the manifold X is a framedcobordism between the self-intersection points X0 of S0 and X1 of S1,and, in particular, the cobordism class µ(x) of the framed manifolds[S0] = [S1] is well-defined.
We note that given a spherical surgery on a manifold M, the attachingsphere S represents an element x ∈ πq M with µ(x) = 0. Indeed, thebase of framed surgery consists of a framed disc bounded by S, andtherefore, the sphere S in this case is the Wall representative of x withno self-intersection points. The converse statement is also true.
Theorem 5.4. Let x be an element of the homotopy group πq M of a manifoldof dimension m ≥ 5 with q ≤ m/2. If µ(x) = 0, then there is a sphericalsurgery along an attaching sphere S that represents x.
Proof. If µ(x) = 0, then all self-intersection points of the Wall represen-tative S of x can be cancelled by regular homotopy of S in M. Indeed,if m > 2q, then it suffices to use a regular homotopy that places S intoa self-transverse position. If m = 2q and q is even, then µ(x) = 0 im-plies that each positive self-intersection point of S can be paired witha negative self-intersection point; such a pair can be cancelled by theWhitney trick. Finally, if m = 2q and q is odd, then the sign of eachself-intersection point can be changed by the change of the order of in-tersecting sheats of S near the self-intersection point. Again µ(x) = 0in Z2 implies that we can pair the self-intersection points and choosethe orders of intersecting sheets of S near the self-intersection points sothat each pair can be cancelled by the Whitney trick. Thus, if µ(x) = 0,then we may assume that the Wall representative S is an embeddedmanifold.
Let τ1, ..., τk be the frame over the manifold M in Rm+k × 0. SinceS is the Wall representative of x, there is a disc D in Rm+k × [0, 1]bounded by S and framed by vector fields v1, ..., vm−q+k such that overS each vector field vi restricts to τi for i = 1, ..., k. Then D is a base of

60 elements of surgery theory
Figure 5.6: The immersed disc S in M aswell as the disc D.
framed surgery over S.
Remark 5.5. We have already considered the case m = 1 and m = 2,see section 3.4. In the case m = 2 there is indeed an obstruction µ(x)to performing a surgery along x. We identified that obstruction withan element in πS
1 ' Z2. In the case m = 3 (and q ≤ 1), the obstructionµ(x) is trivial, since a generic sphere of dimension q in a 3-dimensionalmanifold is embedded. Therefore, the conclusion of Theorem 5.4 isalso true in the case m = 3. In the case m = 4 and q = 1, we cancertainly perform a surgery along an attaching sphere representingany class x ∈ π1M. However, if m = 4 and q = 2, the Whitney trick isnot available in general.
In the rest of the section we will show that when the dimension of themanifold M is 2q+ 1 ≥ 5, then every embedded sphere of dimension qin M is a Wall representative. In fact, we will proof a slightly strongerresult. Namely, let M ⊂ Rm+k be a framed simply connected manifoldof dimension m ≥ 5 with a frame τ1, ..., τk.
Theorem 5.6. Suppose that m ≥ 2q and m ≥ 5. Let λ be an elementin πq(M). Suppose that µ(λ) = 0. Then any embedded sphere S ⊂ Mrepresenting λ is a Wall representative of λ.
Proof. Since µ(λ) = 0, there exists an embedded Wall representativeSλ of λ. Choose a homotopy Sq × [0, 1] → M × [0, 1] between theinclusions of a Wall representative Sλ and S into M. It is a map ofa manifold of dimension q + 1 to a manifold of dimension at least2(q + 1) − 1, and it is an embedding near the boundary. Therefore,by the Whitney strong immersion theorem, we may modify it awayfrom the boundary into an immersion. Let S denote the image ofthis immersion in M = M × [0, 1]. In Rm+k × [0, 1] × R there is animmersed disc D = Dq+1 × [0, 1] such that the disc Dq+1 × 0 is thecore Dλ of a framed surgery along Sλ, the disc Dq+1 × 1 is a disc inRm+k × 1 ×R, while ∂Dq+1 × [0, 1] coincides with S, see Figure 5.6
A base of framed surgery along Sλ consists of the disc Dλ as well asperpendicular vector fields v1, ..., vm−q+k over D such that the vectorfields vi coincide with τi for i ≤ k over Sλ. We may extend vectorfields τi over M = M× [0, 1] by translation in the direction [0, 1]. SinceSλ is a deformation retract of S we may extend the vector fields vi|Sλ
to perpendicular vector fields over S in Rm+k× [0, 1] in such a way thatvi = τi for i ≤ k. Since S ∪ Dλ is a deformation retract of D, we mayextend the vector fields vi over D. It remains to observe that the disc

the kervaire invariant and signature 61
10 When m = 2q and q is even, thenλ · λ = 2µ(λ), and therefore a framedsurgery along an embedded sphere S ex-ists if and only if its normal bundle istrivial. The same is true when m = 2qwith q odd, but q 6= 1, 3, 7, e.g., see[Ko07, Proposition X.2.1].
11 A manifold M is (q − 1)-connected ifπi M = 0 for all i ≤ q− 1.
12 Let W be a spherical cobordism be-tween W0 and W1 of index n + 1 ≤m/2, where m is the dimension of themanifolds W0 and W1. Suppose thatthe attaching sphere of the correspond-ing surgery represents an element x ∈πnW0. Then πiW0 = πiW1 for i < n,while πnW1 is a factor group of πnW0by a subgroup containing x.
13 We say that a topological space X ishomotopy equivalent to a topologicalspace Y if there are continuous mapsf : X → Y and g : Y → X such thatf g and g f are homotopic to identitymaps.
14 Hint: By the Whitehead theorem,two connected manifolds (or, even CW-complexes) X and Y are homotopyequivalent if there is a map f : X →Y that induces an isomorphism f∗ ofhomotopy groups in all degrees. Themap f : M → Sm collapsing the com-plement to an open disc in M inducesan isomorphism of homology groups inall degrees. Therefore, by the relativeHurewicz theorem, it induces an isomor-phism of homotopy groups in all de-grees.
Dq+1 × 1 together with vector fields vi over it is a base of framedsurgery along S.
In particular, suppose that m ≥ 5. When m = 2q + 1, a framed surgeryis possible along any embedded sphere S of dimension q in M. Whenm = 2q, an immersed sphere S of dimension q in M is a Wall repre-sentative of [S] if and only if it is regular homotopic to an embeddingand µ([S]) = 0. 10
5.2 Homotopy spheres
Theorem 5.7. A framed manifold M is cobordant to a (q − 1)-connectedmanifold if M is of dimension 2q or 2q + 1.11
Proof. In low dimensions, the Wall representative S of x ∈ πi M can bechosen embedded, and therefore the obstruction µ(x) to the existenceof a spherical surgery along S is trivial. By Lemma 11.4,12 a surgeryalong S kills a subgroup in πi M containing x. Thus we may make M(q− 1)-connected by induction in dimension i starting with i = 1. Foreach dimension we only need to perform finitely many surgeries sincefor an i− 1 connected manifold M the i-th homotopy group is finitelygenerated (it is isomorphic to Hi M.)
For example, when the framed manifold M is of dimension 2 or 3, The-orem 5.7 asserts that M can be made path connected, while a manifoldM of dimension 4 or 5 can be made simply connected.
To summurize, we have shown that a framed manifold M of dimension2q or 2q + 1 is cobordant to a framed q − 1 connected manifold. Wewill show now that a q-connected manifold is necessarily a homotopysphere.
Definition 5.8. A closed manifold M of dimension m is said to be ahomotopy sphere if it is homotopy equivalent to the standard sphere.13
Exercise 5.9. Show that an oriented closed manifold M of dimensionm is a homotopy sphere if and only if πi M = 0 for i < m.14
It turns out that every homotopy sphere of dimension m is actuallyhomeomorphic to the standard sphere Sm. This statement is a deep

62 elements of surgery theory
15 The Poincare Duality: Let M be anoriented closed manifold of dimensionm. Then Hk(M) ' Hm−k(M).
16 The Universal Coefficient Theorem:Hk(X) ' Torsion Hk−1(X)⊕Free Hk(X).
17 Recall, for example, that any orientableframed surface is cobordant either to aframed torus or a framed sphere, but aframed torus may not be cobordant toa framed sphere. In analysis of framedsurfaces F, we worked with algebraicnumbers of intersections of circles αi , βirepresenting elements in π1F.
theorem that is often referred to as the topological generalized Poincaréconjecture. It was proved by Smale (for m ≥ 5), Freedman (for m = 4),and Perelman (for m = 3).
Theorem 5.10. A closed q-connected manifold of dimension m = 2q orm = 2q + 1 is a homotopy sphere.
Sketch of a proof. Since M is q-connected, its homology groups are triv-ial in dimensions ≤ q. Consequently, by the Poincare duality,15 itscohomology groups are trivial in dimensions ≥ m− q except for thosein dimension m. By the Universal Coefficient Theorem,16 this impliesthat the homology groups of M are trivial in dimensions ≥ m− q ex-cept for those in dimension m. There is a map of M to Sm of degree 1,which, by the Whitehead theorem, is a homotopy equivalence.
Thus the obstruction to the existence of a cobordism of a framed man-ifold to a homotopy sphere may only occur when we attempt to surgeout homotopy classes in the middle dimension.
Suppose that a framed manifold M is (q− 1)-connected. We will seepromptly that if M is of odd dimension 2q+ 1, then it is actually cobor-dant to a q-connected manifold. By contrast, if M is of even dimension2q, then it may not be cobordant to a framed q-connected manifold.17
There are obstructions which we briefly describe next.
Let K be a field, and V denote the vector space πq M⊗K. An elementin V is a linear combination of homotopy classes x of maps Sq → M.The self-intersection numbers µ(x) that we have already defined giverise to a so-called self-intersection form µ on V. It is a quadratic formassociated with the bilinear intersection form.
The mentioned obstructions are defined in terms of invariants of quad-ratic forms, which we will review in section 5.3. Note that when q iseven, the self-intersection numbers µ(x) are integers, while for q odd,the self-intersection numbers are only defined mod 2. For this reason,we need invariants of quadratic forms over K = R (or K = Q) as wellas over K = Z2.

the kervaire invariant and signature 63
18 In other words, a form is non-degenerate if the homomorphisms V →Hom(V, K) defined by x 7→ ϕ(x,−) andx 7→ ϕ(−, x) are isomorphisms of vectorspaces over K. We note that the homo-morphism x 7→ ϕ(x,−) is invertible ifand only if x 7→ ϕ(−, x) is.
19 Over the field of real numbers, it istempting to define the associated bilin-ear form by (x, y) = 1
2 [q(x + y)− q(x)−q(y)]. Then q(x) = (x, x). However, ingeneral, division by 2 in K may not beavailable. That is why we define the as-sociated bilinear form without the factor1/2.
20 Indeed, if we know all the values x · x,then the value x · y can be found by theformula
2x · y = (x + y) · (x + y)− x · x− y · y.
21 i.e., there is a basis v1, ..., vn in V suchthat vi · vj = 0 for i 6= j.
5.3 Bilinear and quadratic forms
In this section we will give definitions of bilinear and quadratic formsover a field K, and review their invariants.
A bilinear form on a vector space V is a map ϕ : V × V → K such thatϕ(x, y) becomes a linear function when any of the two parameters isfixed. We will often write the value ϕ(x, y) of a bilinear form on twovectors as x · y. A bilinear form is symmetric if x · y = y · x, symplecticif x · x = 0, and skew-symmetric if x · y = −y · x. The form is non-degenerate if for every linear function f on V there are unique vectorsv and w such that f (y) = v · y for every vector y, and f (x) = x · w forevery vector x. 18
A quadratic form V → K is a function q that satisfies q(αx) = α2q(x)for all vectors x and scalars α, and such that the function
(x, y) = q(x + y)− q(x)− q(y)
of two arguments is a bilinear form on V; it is necessarily symmetric.19
Every bilinear form ϕ restricts to a quadratic form q(x) = ϕ(x, x).However, the restricted quadratic form q is associated with
(x, y) = q(x + y)− q(x)− q(y) = ϕ(x, y) + ϕ(y, x),
not with ϕ. In particular, if we begin with a symmetric bilinear formϕ, then the bilinear form (, ) associated with the restricted quadraticform satisfies (x, x) = 2ϕ(x, x) = 2q(x).
When division by 2 in K is possible, the restricted quadratic formq(x) = ϕ(x, x) completely recovers the bilinear symmetric form ϕ.20
In fact, in this case every bilinear symmetric form can be obtainedfrom a unique quadratic form.
Quadratic forms over R or Q. Recall that with each quadratic form qthere is an associated bilinear symmetric form ϕ.
Theorem 5.11 (Isomorphism types of symmetric forms). Let ϕ be asymmetric non-degenerate bilinear form on a finite dimensional vector spaceV over a field K in which 2 is invertible. Then there is an orthogonal basisfor V.21
Proof. Pick any two vectors v and w with ϕ(v, w) 6= 0. If ϕ(v, v) 6=0 or ϕ(w, w) 6= 0, then one of these vectors can be chosen to be

64 elements of surgery theory
22 This fact is known as the Sylvester’slaw of inertia.
23 To show the existence of b1, pick anylinear function f on V with f (a1) = 1.Since ϕ is non-degenerate, there exists avector b1 such that
ϕ(a1, b1) = f (a1) = 1.
the first basis vector e1. Otherwise, put e1 = v + w and note thatϕ(v + w, v + w) = 2ϕ(v, w), which is non-zero provided that 2 is in-vertible. The linear function x 7→ ϕ(e1, x) is non-zero, so its kernel is avector space of dimension dim V− 1 with a non-degenerate symmetricbilinear form. Thus an orthogonal basis can be found by induction indim V.
Over the field of real numbers K = R, we may further scale vectors inan orthogonal basis of V to obtain a new basis ei such that ϕ(ei, ei) =
±1. Using the new basis, the values of the form ϕ are especially easyto compute:
(v1e1 + · · ·+ vnen) · (w1e1 + · · ·+ wnen) = ±v1w1 ± · · · ± vnwn.
We say that n is the rank of the form ϕ. The signature of the form ϕ isthe difference between the number of basis vectors ei with ei · ei = 1and the number of basis vectors ej with ej · ej = −1. We note that therank and the signature of the form ϕ do not depend on the choice ofthe basis ei.22
Corollary 5.12. A symmetric non-degenerate space of finite dimension overR is determined by its rank and signature. The same is true for quadraticforms over R.
Since quadratic forms determine symmetric non-degenerate forms,Theorem 5.11 classifies not only bilinear but also corresponding quad-ratic forms. It is important that char K 6= 2 here.
Quadratic forms over Z2. We say that a basis ai, bi is a symplec-tic basis for a vector space V over a field K with symplectic non-degenerate form, if ai · bi = 1 for all i and all other products ai · aj
and ai · bj and bi · bj are trivial.
Theorem 5.13 (Isomorphism types of symplectic forms.). For everysymplectic non-degenerate space V of finite dimension, there is a symplec-tic basis ai, bi in the vector space V. Thus, a symplectic non-degenerateform is determined by its rank.
Proof. Choose a1 to be an arbitrary vector. There exists a vector b1
such that a1 · b1 = 1.23 The space Va orthogonal to a1 is of dimen-sion dim V − 1 and contains a1. Similarly, the space Vb orthogonal tob1 is of dimension dim V − 1 and contains b1. Thus the orthogonalcomplement to 〈a1, b1〉 is the space Va ∩ Vb of dimension dim V − 2.The restriction of the symplectic form to the orthogonal complement

the kervaire invariant and signature 65
24 Indeed, if α = 1, then the conditionq(αx) = α2q(x) is clearly vacuous. Onthe other hand, if α 6= 1, i.e., if α = 0,then q(0 · x) = 0 · q(x) follows from
0 = (0, 0) = q(0) + q(0) + q(0, 0).
25 In the vector space Z2 ⊕ Z2 withsyplectic basis a, b there are only threevectors a, b and a + b. Since (a, b) = 1,among the three values q(a), q(b) andq(a+ b) either there is one appearance of1 in which case the form is isomorphic toq0,0, or there are three appearances of 1in which case the form is isomorphic toq1,1.
26 Indeed, when we choose another basis
a′1 = a1 + a2, a′2 = a1 + b1 + a2 + b2
b′1 = b1 + a2, b′2 = a1 + b1 + b2
the form q11 ⊕ q11 becomes q0,0 ⊕ q0,0.
to 〈a1, b1〉 is again a symplectic non-degenerate form. Therefore, byinduction, it has a symplectic basis a2, b2, ..., an, bn. Then a1, b1, ..., an, bn
is a symplectic basis for V.
A quadratic form on a vector space V over Z2 is a function q : V → Z2
such that the associated form
(x, y) = q(x) + q(y) + q(x + y)
is bilinear. Note that over Z2 we do not need to require in the defini-tion of a quadratic form that q(αx) = α2q(x).24 The form q is calleda quadratic non-degenerate form if the associated bilinear form is a non-degenerate form (it is necessarily symplectic).
If V1, ..., Vk are vector spaces with quadratic forms q1, ..., qk respectively,then on the vector space V1⊕ · · · ⊕Vk, there is a well-defined quadraticform q1 ⊕ · · · ⊕ qk given by
q1 ⊕ · · · ⊕ qk(x1 ⊕ · · · ⊕ xk) = q1(x1) + · · ·+ qk(xk).
Since q(x + y) is the sum of (x, y), q(x) and q(y), in symplectic basisthe quadratic form is determined by its values on the basis vectors.For i, j = 0, 1, let us denote by qij the form on a symplectic space overZ2 with symplectic basis a, b defined by qij(a) = i and qij(b) = j. Thenq0,0 is isomorphic to q1,0 and q0,1, and is not isomorphic to q1,1.25 Thus,every non-degenerate quadratic form over Z2 of rank 2 is isomorphiceither to q0,0 or q1,1. Also q1,1 ⊕ q1,1 is isomorphic to q0,0 ⊕ q0,0.26
Let now V be a vector space with a non-degenerate quadratic form qof arbitrary rank. Choose a symplectic basis a1, b1, ..., an, bn for V.The number
Arf(q) = q(a1)q(b1) + · · ·+ q(an)q(bn)
in Z2 is called the Arf-invariant of the form q; it does not dependon the choice of the symplectic basis for V. To prove the invarianceof the Arf-invariant, note that q is the orthogonal sum q1 ⊕ · · · ⊕ qn
where qi is the restriction of q to the vector subspace 〈ai, bi〉 of V. Theneach qi is a non-degenerate form; indeed, its associated bilinear formis the symplectic form of rank 2 with symplectic basis ai, bi. Wehave seen that each non-degenerate form of rank 2 is isomorphic toq0,0 or q1,1. Thus, we deduce that q is isomorphic to mq0,0 + nq1,1.Clearly, the Arf-invariant of q is 0 if n is even, and 1 otherwise. Itremains to observe that if n is odd, then most of the values of thequadratic form mq0,0 + nq1,1 are 1, while if n is even, then most of thevalues are 0. Therefore if the form mq0,0 + nq1,1 is isomorphic to a formm′q0,0 + n′q1,1, then the parities of n and n′ are the same.

66 elements of surgery theory
Figure 5.7: Intersections and self-interesections of Sx and Sy.
Figure 5.8: Self-interesctions of Sx+y.
5.4 Main theorems
In the case m = 2q+ 1 the obstruction µ is zero by dimensional reason.We will show that in this case, indeed, it is possible to surge out all theclasses in dimension q.
Theorem 5.14. If M is a closed framed manifold of dimension m in Rk+m
with odd m ≥ 5 and k m, then M is cobordant to a homotopy sphere.
In the case of (q− 1)-connected manifolds M of even dimension 2q > 4there are obstructions to the existence of a framed cobordism of M toa homotopy sphere, which we describe next. Let K be a field. We aremostly interested in the case where K is the field of real numbers R
(or rational numbers Q) and the case where K is the field Z2. Let Vdenote the vector space πq M ⊗K. For example, when K = R, thebasis of the vector space V = Rn consists of generators [x] of the freepart of πq M.
There is a bilinear form V ⊗ V → K on the vector space V calledthe intersection form. To a pair of basis vectors [x] and [y] it puts intocorrespondence the number [x] · [y] of intersection points of x and ycounted with signs. For general vectors x, y in V, the value x · y of thebilinear form is computed by linearity. We have also encountered aquadratic form µ that assigns to a basis vector [x] the self-intersectionnumber of the Wall representative x.
The quadratic form µ is associated with the intersection form. Indeed,let Sx and Sy be Wall representatives in M of classes x and y. Thespheres Sx and Sy can be joined by a thin tube whose interior is disjointfrom Sx and Sy; the resulting sphere Sx+y is the Wall representative ofx + y, see Figures 5.7 and 5.8. The set of self-intersection points ofSx+y consists of the self-intersection poings of Sx, the self-intersectionpoints of Sy, and the intersection points of Sx and Sy. In other words,
µ(x + y) = µ(x) + µ(y) + x · y.
Thus, indeed, the map µ is a quadratic form associated with the inter-section form.
Remark 5.15. Since the intersection form is associated with the self-intersection form, we have 2µ(x) = x · x. This equality could be ver-ified geometrically. Indeed, the product x · x is the algebraic numberof intersection points of an immersed framed sphere S representing xand a sphere S′ in M obtained from S by a slight isotopy in the direc-

the kervaire invariant and signature 67
Figure 5.9: Every self-intersection point(red) in µ(x) corresponds to two inter-section points (black) in x · x.
27 It is known that the signature of aframed manifold is always zero.
tion of, say, the last frame vector. Each self-intersection point in µ(x)corresponds to two intersection points in x · x; hence 2µ(x) = x · x, seeFigure 5.9
Suppose now that the dimension m of the framed manifold M is 2qwith q even. In this case the intersection form is well-defined overintegers, and we choose the ground filed K to be the field of rationalnumbers. In other words, V = πq M ⊗Q. The vector space V is thedirect sum of the subspaces V− and V+ over which µ is negative andpositive definite respectively. We have seen that the isomorphism typeof a quadratic non-degenerate form is determined by its rank = dim Vand the signature σQ = dim V+ − dim V−. The rank of the form µ maychange under a normal cobordism, but the signature σQ does not.
Theorem 5.16. If M is a closed framed manifold of dimension m in Rk+m
with m = 4s > 4 and k m, then M is cobordant to a homotopy sphere ifand only if σQ = 0. 27
Suppose now that m = 2q with q odd. Then the sign of a double pointof a sphere Sq in M is not well-defined. In other words, the quadraticform µ is only well-defined over Z2, which we choose to be our groundfield K.
The Kervaire invariant of the framed manifold M is defined to be theArf-invariant of the quadratic form µ.
Theorem 5.17. Let M be a closed framed manifold in Rk+m of dimension2q with q odd. Then M is cobordant to a homotopy sphere if and only if theKervaire invariant of M is trivial.
Exercise 5.18 (Pontryagin). Prove that πS2 ' Z2.
5.5 Further reading
The Kervaire invariant of framed surfaces was first used by Pontrjaginin Homotopy classification of the mappings of an (n+ 2)-dimensionalsphere on an n-dimensional one to calculate πn+2Sn [Po50]. A de-tailed geometric solution to the problem appeared in his book Smoothmanifolds and their applications in homotopy theory [Po85].
In 1960 Kervaire introduced the invariant in A manifold which doesnot admit any differentiable structure [Ke60] for 10-dimensional man-

68 elements of surgery theory
ifolds to detect a triangulated manifold which does not admit a smoothstructure. In order to construct the invariant Arf, Kervaire used theloop space Ω = ΩS6 over the sphere of dimension 6. Such a space ishomotopy equivalent to a CW-complex with one cell of each dimen-sion divisible by 5. Let ek denote the cohomology class generatingthe 5k-th cohomology group of ΩS6. Since π9(Ω) is trivial, it can beshown that for any triangulated manifold M of dimension 10, and anyclass x ∈ H5M, there is a map f : M → Ω such that f ∗e1 = x. Thisallowed Kervaire to construct an operation ϕ : H5(M; Z2)→ Z2; givena class x, find a function f such that f ∗e1 is a class whose reductionmodulo 2 is x, reduce the class f ∗e2 to a class mod 2, and then inte-grate it over M to obtain an element in Z2. Kervaire showed that theoperation ϕ is a well-defined quadratic form associated with the inter-section form on M. Furthermore, the Arf invariant Arf (ϕ) is trivial forthe quadratic form ϕ on every smooth manifold of dimension 10. Onthe other hand, Kervaire presented a triangulated manifold M whoseArf invariant is clearly 1. Kervaire concluded that M does not admit asmooth structure.
In Groups of Homotopy spheres I [KM63] Kervaire and Milnor inter-preted the Kervaire invariant differently. Namely, let M be a framedq− 1 connected manifold of dimension 2q with q-odd. Every elementx in πq M⊗Z2 can be represented by an embedded sphere. There isa function ψ : πq M ⊗Z2 → Z2 that detects a twisting of the normalbundle in M of the embedded sphere representing x, i.e., ψ(x) = 0 ifand only if the normal bundle of a sphere representing x is trivial. Thefunction ψ is a quadratic form associated with the intersection form onM. Kervaire and Milnor defined the Kervaire invariant of the manifoldM to be the Arf invariant of the quadratic form ψ.
We adopted a slightly different approach. Instead of representing xby an embedded sphere and detecting a twisting of its normal bundle,we choose a Wall representative of x and count the number of self-intersection points of the Wall representative. With such a definitionthe relation of the quadratic form to the intersection form is clear.
Spherical modifications of framed manifolds below the middle dimen-sion were studied by Milnor in an unpublished note Differentiablemanifolds which are homotopy spheres [Mi59]. In a published formthe technique appeared in A procedure for killing homotopy groupsof differentiable manifolds [Mi61]. At the same time a non-framedversion of spherical modifications below the middle dimension ap-peared in Modifications and cobounding manifolds [Wa60] by Wal-lace. The main theorem for odd dimensional manifolds (asserting that

the kervaire invariant and signature 69
a framed closed manifold of dimension 2q + 1 ≥ 5 is cobordant to ahomotopy sphere) was independently proved by Wall in Killing themiddle homotopy groups of odd dimensional manifolds [Wall62],and by Kervaire and Milnor in Groups of Homotopy spheres I [KM63].In the same paper, Kervaire and Milnor established the main theoremsfor manifolds of dimension 2q both when q is odd and even. Theexpected paper Groups of Homotopy spheres II never appeared.
It turned out that in most of the dimensions there are no framedmanifolds with non-trivial Kervaire invariant. In fact, Browder [Bra69]showed that only manifolds of dimension 2k − 2 may have non-trivialKervaire invariant. Recently Hill, Hopkins and Ravenel [HHR16] showedthat in high dimensions (2k − 2 > 126) manifolds with Kervaire invari-ant one do not exist. It is still not known if such a manifold exists indimension 126; in lower dimensions 2k − 2 such manifolds have beenconstructed.

6
Surgery on framed manifolds
We have seen that it is easy to surge out homotopy classes of a closedframed manifold M of dimension m = 2q or 2q + 1 in dimensionsbelow q. In particular, every closed framed manifold is cobordant toa framed (q− 1)-connected manifold M. Furthermore, if the manifoldM is actually q-connected, then it is homeomorphic to a sphere, inwhich case we say that M is a homotopy sphere.
When m = 2q is even, the manifold M may not be cobordant to ahomotopy sphere. In §6.1 we will show that when q is even, the signa-ture σ(M) of a manifold M is a well-defined invariant, while when qis odd, the Kervaire invariant Arf(M) is a well-defined invariant of acobordism. In particular, if σ(M) 6= 0 when q is even, or Arf(M) 6= 0when q is odd, then M is not cobordant to a homotopy sphere.
On the other hand, we will show that when q is even, the invariantsσ(M) and Arf(M) are the only obstructions to the existence of a cobor-dism of M to a homotopy sphere. In fact, since the manifold M is(q− 1)-connected its q-th homotopy group is free. If the obstructinginvariants are trivial, then we may always find a generator λ of πq Mwith an embedded Wall representative Sλ. Then a surgery along Sλ
results in a framed (q− 1)-connected manifold M′ with a reduced ho-motopy group πq M′ ≈ πq M/〈λ〉.
The case m = 2q+ 1 turns out to be more complicated. In this case anyembedded sphere S representing a class λ ∈ πq M is a Wall representa-tive of λ. When λ is a generator of a free summand of πq M a surgeryalong S reduces the homotopy group of πq M, as in the case of m = 2q.By performing surgery along embedded Wall representatives of gen-erators of free summands of πq M, we may assume that πq M is finite.

surgery on framed manifolds 71
Figure 6.1: The (grey) horizontal mani-fold M bounds a manifold W (upper halfspace). Spheres Sx and Sy in M intersectalong a (red) manifold. The discs Dxand Dy in W bound Sx and Sy respec-tively. Their (blue) intersection boundsthe (red) intersection between Sx and Sy.
1 Suppose that e∗1 , ..., e∗k−1 have been con-structed. Consider a linear functionf : πq M → Z such that f (ek) = 1 andf is trivial on all vectors v with v · ek =0. Then there is a vector e∗k such thatf (w) = w · e∗k for all w.
2 If ∑ αiei + βie∗i = 0, then taking theproduct with ej gives β j = 0, and takingthe product with e∗j gives αj = 0.
A surgery along a generator λ of finite order results in a manifold M′
with a class λ′ in πq M′ such that πq M/〈λ〉 ≈ πq M′/〈λ′〉. If q is even,the order of the generator λ′ is infinite, and therefore we may alwaysfirst perform a surgery along Sλ to "replace" λ with λ′ and then reduceλ′. If q is odd, and the class λ is of finite order s, then the class λ′ maybe of some finite order t. In this case we need to consider several casesto insure that the order of πq M can always be reduces by a sequenceof appropriate surgeries. As a result, it follows that when m is odd,the manifold M is always cobordant to a homotopy sphere.
6.1 Invariance of signature and Kervaire invariant
In this section we will show that the signature and Kervaire invariantof a manifold M do not change under cobordism. The proof relieson the existence of a nice basis for the homotopy group πq M of abounding manifold M.
Let M be a closed framed q− 1 connected manifold of dimension 2qbounding a q − 1-connected. In particular, the group πq M is a freeabelian group. Suppose that M bounds a compact framed manifoldW. Let i : M→W denote the inclusion of the boundary, and K ⊂ πq Mthe kernel of the induced homomorphism i∗ in homotopy groups.
Lemma 6.1. We have x · y = 0 for any elements x, y in K.
Proof. The classes x and y are represented by embedded transversespheres Sx and Sy in M, see Figure 6.1. The number x · y is the alge-braic number of intersection points of Sx and Sy. Since x and y belongto the kernel of the homomorphism i∗, the spheres Sx and Sy bounddiscs Dx and Dy in W. We may assume that Dx is transverse to Dy.Then the curve Dx ∩ Dy defines an oriented cobordism to zero of theintersection manifold Sx ∩ Sy. Thus, x · y = 0.
Lemma 6.2. We have rank K = 12 rank πq M.
Proof. Choose a basis e1, ..., en for K. By Lemma 6.1, the intersectionproduct of vectors in K is trivial. On the other hand, since the in-tersection form over πq M is non-degenerate, by induction there areelements e∗1 , ..., e∗n in πq M such that e∗i (ej) = δij and e∗i · e∗j = 0 for all iand j, where δij is the Kronecker symbol.1 The vectors e1, ..., e∗n are lin-early independent.2 Furthermore, we claim that ei, e∗i is a basis for

72 elements of surgery theory
3 There is a non-zero function f : πq M→Z which is trivial on all ei and ej.Since the intersection pairing is non-degenerate, there is a vector e such thatf (w) = e · w for all w.
4 For example, suppose that we haveproven that the signature of a bound-ing manifold is trivial. Let us show thatσ(M0) = σ(M1) whenever M0 is cobor-dant to M1. Since M0 is cobordant toM1, the disjoint union of M0 and a copy−M1 of M1 with reverse orientation is abounding manifold. Therefore
0 = σ(M0 t (−M1)) = σ(M0)− σ(M1).
5 Note that since πq M is a free abeliangroup, it is isomorphic to a direct sumof copies of Z. We have constructed itsbasis e1, ..., e∗n. The group πq M ⊗Z2 isobtained from πq M by replacing eachsummand Z with a copy of Z2. Thereis a mod 2 reduction homomorphismπq M → πq M ⊗ Z2. It takes the basisei , e∗i to a symplectic basis ai , bi.
6 Every plane field over a disc can beframed.
πq M. Indeed, if not, then there is a vector e 6= 0 perpendicular to eachei and e∗j .3 Since e is not in the kernel K, the element i∗e is non-trivialin πqW. Since the intersection form
πqW/Tor⊗ πq+1(W, M)/Tor −→ Z
is non-degenerate with respect to the first factor, we deduce that thereis an element g in πq+1(W, M) such that i∗e · g = 1. Then e · ∂g = 1.Since ∂g is in K, this contradicts our assumption that e is perpendicularto K. Thus, indeed, the vectors ei, e∗i span πq M.
Theorem 6.3. The signature and Kervaire invariant do not change undercobordism.
Proof. It suffices to show that if a q− 1 connected closed framed man-ifold M is a boundary, then its mentioned invariants are trivial. 4 Onthe other hand, if M is bounded by a framed manifold W, we mayassume that W is q− 1 connected as there is no obstruction to framedsurgery of indices below the middle range.
If dim M = 2q with q even, then by Lemma 6.2, the vector spaceπq M⊗R contains a subspace K⊗R of half rank over which the non-degenerate intersection form vanishes. Thus, the signature of M iszero.
Let M be a manifold of dimension 2q with q odd in Rk bounded bya framed manifold W ⊂ Rk × [0, 1]; we will denote the frame overW by τ1, ..., τk. We may choose a symplectic basis ai, bi of πq M ⊗Z2 such that ai is a basis for K ⊗Z2
5. We claim µ(a) = 0 for alla ∈ K ⊗Z2. Indeed, by the Whitney embedding theorem, we maychoose an embedded sphere S representing a. Since i∗(a) = 0, thereis an immersed disc D in W bounded by S. At each point x ∈ D, theperpendicular space T⊥x D of D is a direct sum Ux ⊕ Vx of orthogonalsubspaces, where Ux is the orthogonal complement to TxD in TxW,and Vx is the perpendicular space T⊥x W. The vector spaces Vx areframed by τ1, ..., τk. Choose an arbitrary frame for Ux continuouslydepending on x for all x ∈ D.6 We may slightly perturb D in Rk+1
together with its frame τ1, ..., τk+q so that it becomes a base for framedsurgery. The existence of D, then, implies that S is an embedded Wallrepresentative of a, and therefore µ(a) = 0. Finally, since µ(ai) = 0,the Kervaire invariant ∑ µ(ai)µ(bi) is trivial.
We note that a priori the signature and Kervaire invariants are onlydefined for (q − 1)-connected manifolds of dimension m = 2q. The-

surgery on framed manifolds 73
orem 6.3 implies, however, that the definition of these invariants canbe extended over arbitrary closed framed manifolds. Indeed, givenan arbitrary closed framed manifold M0, it is cobordant to a framed(q− 1)-connected manifold M1. We may define the invariants of M0
to be the same as those of M1. To show that the invariants of M0 arewell-defined, suppose that M0 is cobordant to two different framed(q− 1)-connected manifolds M1 and M′1. By Theorem 6.3, the invari-ants of M1 and M′1 are the same. Thus the signature and Kervaireinvariant are well-defined for arbitrary closed framed manifolds.
Furthermore, in the definition of signature σ(M) and in the proof ofinvariance of signature in Theorem 6.3 we do not use that the manifoldM, or cobordisms, are framed. In other words, the signature is well-defined for an arbitrary oriented closed manifold of dimension m = 2qfor q even, and it is invariant under (non-framed) cobordisms.
6.2 The main theorems for even dimensional manifolds
Effect of surgery on homotopy groups
Let M be a q − 1-connected manifold of dimension 2q ≥ 5. In par-ticular, the group πq M is free abelian. A framed spherical surgeryon M consists of removing a closed neighborhood hq = Sq × Dq of asphere Sλ, and then attaching to the remaining manifold M0 a thick-ening h′q = Dq+1× Sq−1 of a sphere Sλ′ . The resulting manifold will bedenoted by M′. We will denote the disc ∗ ×Dq in the neighborhoodhq by Dλ. Let λ and λ′ denote the classes [Sλ] and [Sλ′ ] in πq M andπq M′ respectively. Suppose that λ is a generator of an infinite cyclicsummand of πq M.
Lemma 6.4. The meridian ∂Dλ in ∂hq is null homotopic in M0.
Proof. Since the intersection pairing on homotopy groups πq M is non-degenerate, there is an element µ ∈ πq M such that µ · λ = 1. Usingthe Whitney trick, we may represent µ by a sphere Sµ which intersectsSλ transversally at a unique point. Furthermore, we may assume thatnear the intersection point Sµ coincides with Dλ. Then Sµ \ Dλ is adisc in M0 bounding ∂Dλ.
Exercise 6.5. The homotopy group πk(M, M0) is trivial for k < q. Fork = q it is isomorphic to Z with a generator given by the class of Dλ.

74 elements of surgery theory
7 The group πq+1(M, M0) is isomorphicto πq+1(Sq × Dq, Sq × Sq−1), while thelatter fits an exact sequence
πq+1(Sq×Dq)j∗−→ πq+1(Sq×Dq, Sq×Sq−1)
→ πq(Sq × Sq−1)i∗−→ πq(Sq × Dq).
The homomorphism j∗ is trivial since thehomomorphism
πq+1(Sq × Sq−1)→ πq+1(Sq × Dq)
is surjective. On the other, hand, the ker-nel of the homomorphism i∗ is Z2 gen-erated by the Hopf map to ∗ × Sq−1.
8 The group πk(M′, M0) is isomorphicto the k-th homotopy group of thepair (h′q, ∂h′q). We note that the ho-momorphism j∗ from π∗(∂h′q) to π∗h′qis surjective with kernel isomorphic toπ∗(Sq × pt). Therefore πk(h′q, ∂h′q) ≈πk−1(Sq × pt).
For k = q + 1 it is isomorphic to Z2 with a generator represented bythe map D → Dλ which is a cone over the Hopf map ∂D → ∂Dλ. 7
The group πk(M′, M0) is trivial for k ≤ q, and πq+1(M′, M0) ≈ Z. 8
Lemma 6.6. The manifold M0 is q− 1 connected.
Proof. Let f be an embedding representing an element πk M0 for k <
q. Since the manifold M is q − 1 connected, the map f extends toan immersion F : D → M transverse to Sλ. If k < q − 1, then F(D)
avoids the sphere Sλ, and therefore we may assume the image of Fis in M0. Thus, the element [ f ] is trivial in πk M0. Suppose now thatk = q− 1. Then F(D) is an immersed manifold in M intersecting Sλ atfinitely many points. We may assume that near each intersection pointF(D) coincides with Dλ. By replacing each copy of Dλ in F(D) with acopy of Sµ \ Dλ constructed in the proof of Lemma 6.4 , we obtain animmersed disc in M0 bounding f (Sk).
Lemma 6.7. We have πq M ≈ πq M0 ⊕Z.
Proof. Since the pairing in M is non-degenerate, in the homotopy exactsequence
πq+1(M, M0)∂−→ πq M0
i∗−→ πq Mj∗−→ πq(M, M0)
the homomorphism j∗ is surjective onto a group isomorphic to Z. Onthe other hand, the homomorphism ∂ is trivial. Indeed, by Exercise 6.5,the source of ∂ is represented by the cone over the Hopf map ∂D →∂Dλ. Thus, the image of ∂ is generated by the class of the Hopf mapto ∂Dλ. Since ∂Dλ bounds a disc in M0, we conclude that the image of∂ is trivial.
Lemma 6.8. We have rank πq M > πq M′.
Proof. Since πq(M′, M0) = 0, there is an exact sequence
→ πq+1(M′, M0)→ πq M0 → πq M′ → 0.
Therefore rank πq M = rank πq M0 + 1 ≥ rank πq M′ + 1.
Remark 6.9. Though we do not need it at the moment, the effect of thesurgery can be described more explicitly. Namely, since the manifoldM is (q− 1)-connected of dimension 2q, its homotopy group πq M isfree abelian. Suppose that there is a basis a1, ..., ak, b, c of the groupπq M such that b is orthogonal to all ai and b, c is orthogonal to all

surgery on framed manifolds 75
9 Theorem If σ = 0, then there exists anintegral class x with x · x = 0. Diagonalizethe form over Q and find a rational classu with u · u = 0. Its multiple x = ku isintegral for some integer k. On the otherhand, we have x · x = k2u · u = 0.
ai and c and b · c = 1. Since 2q ≥ 6, we may choose representativesof the basis classes such that the geometric numbers of intersectionpoints agrees with the algebraic number of intersection points of therepresentatives. Suppose also that µ(b) = 0. By Lemma 6.7, the groupπq M is a free abelian group generated by a1, ..., ak, b, while by theexact sequence in Lemma 6.8, the group πq M′ is free abelian generatedby a1, ..., ak.
The case m = 2q with q even.
Theorem 6.10. An oriented closed manifold of dimension 4q > 4 is normallycobordant to a homotopy sphere if and only if σ(M) = 0.
Proof. We only need to prove that if σ = 0, then there is a sequenceof normal spherical surgeries killing all homotopy groups of M. Wemay assume that M is q− 1 connected. This implies that πq M has notorsion. Hence there exists a class x ∈ πq(M) such that x · x = 0.9
We can assume that x is a generator of a free factor of πq(M). Since2µ(x) = x · x = 0, there exists a framed surgery along a sphere Sx rep-resenting x. Since x is generator of a free factor of πq M, by Lemma 6.8a framed surgery along Sx reduces the rank of πq M. Therefore, infinitely many steps, we obtain a homotopy sphere.
The case m = 2q with q odd.
Now let us turn to the case of dimension m = 2q with q odd.
Theorem 6.11. Every q− 1 connected framed closed manifold M of dimen-sion 2q ≥ 5 with q odd is cobordant to a homotopy sphere if and only if theKervaire invariant of M is trivial.
Proof. We only need to prove that if the Kervaire invariant of M istrivial, then M is cobordant to a homotopy sphere. We may assumethat in its framed cobordism class the manifold M has the minimalnumber of generators of the torsion free group πq M. Choose a sym-plectic basis ai, bi of πq(M; Z2) every element in which is repre-sented by a sphere Sq such that [Sq] is a generator of an infinite cyclicsummand of πq M. If µ(ai) = 0 for some i, then we may perform asurgery on M along the representing sphere to kill an infinite cyclicsummand of πq M, which contradicts the choice of M. Thus, µ(ai) = 1for all i, and similarly, µ(bj) = 1 for all j. If πq M is at least of rank4, then we can replace the symplectic basis elements ai, bi, aj, bj by

76 elements of surgery theory
10 We have
µ(a′i) = ai · aj − µ(ai)− µ(aj) ≡ 0.
Figure 6.2: A handle hq, its meridian λ′
and the parallel λ.
a′i = ai + aj, b′i = bi, a′j = bj − bi, b′j = ai so that µ(a′i) = 0.10 Again asurgery along a′i leads to a contradiction with the choice of M. There-fore the rank of πq M is at most 1. However, in this case the Kervaireinvariant µ(a1)µ(b1) is 1 which contradicts the assumption that theKervaire invariant of M is trivial. Thus, the group πq M is trivial, andtherefore M is a homotopy sphere.
6.3 The main theorems for odd dimensional manifolds
Effect of surgery on homotopy groups.
Assume the q− 1 connected manifold M is of dimension m = 2q + 1,and m ≥ 5. In particular, we may define the homotopy classes in πi Mto be free (not pointed) maps Si → M up to free homotopy.
Recall that a spherical surgery in dimension q consists of removing ahandle hq = Sq × Dq+1 from M, and, to the remaining manifold M0,attaching a new handle h′q = Dq+1 × Sq. The core of the handle hq is asphere Sλ of dimension q representing a homotopy class λ of M. Wewill denote the belt disc by Dλ. Similarly, the core of the handle h′qis a sphere Sλ′ of dimension q representing a class λ′ of the resultingmanifold M′ of the surgery. The belt disc is denoted by D′λ.
Exercise 6.12. The group πi(M, M0) is trivial for i < q + 1 and it isisomorphic to Z for i = q + 1. The latter group is generated by theclass [Dλ] of the inclusion of the disc Dλ in hq whose boundary is themeridian of ∂hq, see Figure 6.2.
We note that under the boundary homomorphism the generator [Dλ] =
[1] in the relative homotopy group πq+1(M, M0) maps to the class ∂(1)in πq M0 represented by a meridian of the torus ∂hq. The meridian ofthe torus ∂hq coincides with a longitude of the torus ∂h′q, and thereforethe homomorphism i : πq M0 → πq M′ induced by the inclusion takesthe meridian class ∂(1) to the class λ′. Since ∂(1) and λ′ are repre-sented by the same meridian, it is tempting to use the same notationfor these two classes. However, for calculations below it will be im-portant to distinguish ∂(1) from λ′. For this reason we will keep usinga somewhat strange notation ∂(1) for the meridian class in M0. Simi-larly, we have i′ ∂′(1) = λ where i′ and ∂′ are counterparts of i and ∂
for a surgery along S′λ.
Proposition 6.13. We have πq M/〈λ〉 ≈ πq M′/〈λ′〉.

surgery on framed manifolds 77
11 There is a long exact sequence
→ πq+1(M, M0)→ πq M0 →
→ πq M→ πq(M, M0)→where the group πq(M, M0) is trivial byExercise 6.12.
12 More precisely, πq M ≈ πq M0/〈∂(1)〉.Similarly, πq M′ ≈ πq M0/〈∂′(1)〉. There-fore, the inclusions M0 → M and M0 →M′ induce isomorphisms πq M/ 〈λ〉 'πq M0/〈∂(1), ∂′(1)〉 ' πq M′/ 〈λ′〉 .
13 Note that when λ is a non-trivial ele-ment in πq ⊗Zp ≈ Zp ⊕ · · · ⊕Zp, theclass λ is a generator of a summand inπq ⊗Zp. Therefore, the rank of πq M′ ⊗Zp ≈ πq M ⊗ Zp/〈λ〉 is less than therank of πq M ⊗Zp. However, the orderof πq M may still be the same as the orderof πq M′. Indeed, we may for examplehave, πq M = Z2⊕Z2 while πq M′ = Z4.
14 The extension is unique up to homo-topy since we are extending only q +1 vector fields in perpendicular vectorspaces of dimension q.
Figure 6.3: The solid torus Sq×Dq+1, thelongitude l = (x, τk+1) on the top, andits twist (x, w(x)τk+1) on the bottom.
Proof. The inclusion of M0 into M induces a surjective homomorphismπq M0 → πq M.11 Its kernel is generated by ∂(1). Similarly, the homo-morphism πq M0 → πq M′ is surjective with kernel 〈∂′(1)〉. 12
Corollary 6.14. By a sequence of spherical surgeries on M we may get a(q − 1)-connected closed framed manifold M′ such that πq M′ is a torsiongroup.
Proof. Let λ be a generator of an infinite cyclic summand Z of πq M,then πq M′ ' πq M/Z. Indeed, since λ is a generator of an infinitecyclic summand, by the Poincare duality, there is a class µ such thatλ · µ = 1. By the Whitney trick, we may represent µ by a sphere Sµ
which intersects Sλ at a unique point. Without loss of generality, thesphere Sµ intersects hq along Dλ. Consequently, the sphere Sλ′ is null-homotopic in M′ as it is homotopic to the boundary of Sµ \ Dλ. Now,by Proposition 6.13, we have πq M′ ≈ πq M/〈λ〉. We may repeat theargument to eliminate all infinite cyclic summands in πq M.
Exercise 6.15. Show that the above arguments holds for homologywith coefficients in Zp. In particular, if an element λ is non-trivialin Hq(M; Zp) = πq M⊗Zp, then rank πq M′⊗Zp < rank πq M⊗Zp.13
A base of (not framed) spherical surgery consists of a disc D embed-ded into Rm+k × [0, 1] with boundary ∂D = Sλ together with q + 1perpendicular vector fields τk+1, ..., τk+q+1 over D that restrict to per-pendicular vector fields over Sλ in M. The base of surgery along Sλ
is not unique as we may choose another set τ′k+1, ..., τ′k+q+1 of vectorfields over D. Let w : Sq → SOq+1 be the difference function; at a pointx in Sq = Sλ, we set w(x) to be the rotation that brings each vectorτi(x) to τ′i (x). Conversely, given a difference function w : Sq → SOq+1
we may define new vector fields τ′i = wτi over Sλ and then extendthem (uniquely up to homotopy) over D.14 The difference function wcan be visualized by its action on the thickening hq = Sq ×Dq+1 of theattaching sphere Sλ. It acts by taking a point (x, y) to (x, w(x)), seeFigure 6.3. In particular, it takes the meridian ∂(1) ∈ πq(hq) to itself,and the longitude ∂′(1) to ∂′(1) + α∂(1).
Exercise 6.16. Suppose that (D; τk+1, ..., τk+q+1) extends to a base offramed surgery. Show that if (D; wτk+1, ..., wτk+q+1) also extends toa base of framed surgery, then α is even. Conversely, show that forevery even integer α there exists a difference function w such that(D; wτk+1, ..., wτk+q+1) extends to a base of framed surgery, and w(∂′(1))is ∂′(1) + α∂(1).

78 elements of surgery theory
15 Indeed, suppose that λ is of finite or-der s. Then s(x, λ) = (x, sλ) = 0 for anyx ∈ πq+1 M. In particular, the homomor-phism j∗ : πq+1 M → πq+1(M, M0) ≈ Z
which takes x to (x, λ) is trivial.
16 The class ∂(1) is of infinite order:
πq+1 M λ·−→ πq+1(M, M0)∂−→ πq M0.
17 There is a commutative diagram:
Z
∂′
λ
##Z
∂ //
λ′ !!
πq M0
i′
i // πq M
πq M′
The generator of the left most groupZ is [Dλ]. Its boundary is the merid-ian class in the torus boundary of M0.When included to M′ it becomes λ′. Inother words i′ ∂(1) = λ′. Similarly,i ∂′(1) = λ.
18 Note that ∂(1) · ∂(q) and ∂′(1) · ∂′(1)are 0 in πq∂hq, while ∂′(1) · ∂(1) =−∂(1) · ∂′(1) since q is even.
19 The argument is similar to one we hadbefore. Namely, the homomorphism
πq+1 M→ πq+1(M, M0) ≈ Z
takes any class x to a multiple α[Dλ]of the generator of πq+1(M, M0), whereα = x · λ. Since λ is finite, we havex · λ = 0. Therefore the above homo-morphism is trivial. From the long exactsequence
πq+1 M→ πq+1(M, M0)∂−→ πq M0
we deduce that the homomorphism ∂ isinjective.
The case m = 2q + 1 with q even.
We need to carefully investigate the result of a spherical surgery alongan attaching sphere representing a torsion class λ. We will need apreliminary lemma.
Lemma 6.17. If λ is of finite order in πq M, then the class λ′ ∈ πq M′ is ofinfinite order.
Proof. Any sphere of dimension q + 1 in M algebraically intersects Sλ
zero times.15 Hence Sλ′ represents a class ∂(1) of infinite order inπq M0.16 Suppose that λ′ is of finite order t′ > 0. Then t′∂(1) is inker i′ = Im ∂′.17 Hence, the class x = t′∂(1) + s′∂′(1) in ∂hq becomestrivial in πq M0 for some integer s′. By Lemma 6.1, we have x · x = 0in ∂hq, and therefore s′ = 0. 18 Consequently, t′∂(1) = 0. Since ∂(1) ofinfinite order, we conclude that t′ = 0 which contradicts its definition.Thus, λ′ is of infinite order.
Theorem 6.18. A closed connected framed manifold M of dimension 2q + 1with q even is cobordant to a homotopy sphere.
Proof. We may assume that M is q− 1 connected, and πq M is a torsiongroup. Choose a Wall representative for a generator λ of πq M, and per-form a spherical surgery to obtain M′. Then πq M/〈λ〉 ≈ πq M′〈λ′〉.Next, eliminate the infinite cyclic element λ′ by a spherical surgeryalong a Wall sphere representing λ′. As a result, we reduce the num-ber of cyclic summands of πq M. In finitely many steps, we eliminateall torsion classes of πq M. The resulting q-connected closed orientedmanifold is a homotopy sphere.
The case m = 2q + 1 with q odd.
Now assume that q is odd. We will prove Theorem 6.19.
Theorem 6.19. Let M be a framed closed manifold of dimension m = 2q + 1with q odd. Then M is cobordant to a homotopy sphere.
We may assume that M is (q− 1)-connected, and πq M is finite as allelements of infinite order can be eliminated by surgery.
Let λ be a class in πq M. If it is of finite order s, then ∂(1) is of infiniteorder,19. Then the class s∂(1) is in ker i = im ∂, i.e., as in the proofof Lemma 6.17, a class x = s∂′(1) + t∂(1) is zero in M0 for some t. If

surgery on framed manifolds 79
20 If t = 0, then s∂′(1) = 0, and there-fore ker i′ = im ∂′ is of finite order. Inparticular, ker i′ is disjoint from 〈∂(1)〉.On the other hand, if s′λ′ = 0, thenker i′ ∩ 〈∂(1)〉 contains s′∂(1). Thus, λ′
is of infinite order.
t = 0, then λ′ is of infinite order,20 and therefore πq M can be reducedby, first, trading λ for λ′, and then cancelling λ′. Suppose that t 6= 0.
Theorem 6.20. The order of λ′ is ±t.
Proof. The order t′ > 0 of λ′ divides t as the embedding of M0 into M′
turns the equality x = 0 into tλ′ = 0. Now, interchanging the roles ofλ and λ′ we get that t′∂(1) + s′∂′(1) = 0 for some integer s′ such thatthe order s of λ divides s′. In other words, we get two equations
s∂′(1) + t∂(1) = 0,
s′∂′(1) + t′∂(1) = 0,
in πq M0. If s′ = 0, then t′∂(1) = 0, which contradicts t′ > 0 since ∂(1)is of infinite order. If s′ 6= 0, then subtracting l = s′/s copies of thefirst equation from the second equation, we get t′ = lt. Thus t = ±t′
where t′ is the order of λ′.
Recall that in ∂hq, the sphere ∂(1) is the meridian, and ∂′(1) is thelongitude. So if one framed surgery along Sλ produces a relations∂′(1) + t∂(1) = 0 in πq M0, then there is a twisted framed surgerywhich produces a relation s[∂′(1) + α∂(1)] + t∂(1) = 0, or equivalentlys∂′(1)+ (t− sα)∂(1) = 0, where α is any even integer, see Exercise 6.16.Applying the homomorphism i′∗ leads to a relation (t− sα)λ′ = 0 inM′. Thus, unless t is divisible by s, we may choose an even integer α
so that the order of λ′ is strictly less than s. When t is divisible by s,we may choose a surgery so that the order of λ′ is s. In particular, wemay perform a framed surgery along any embedded sphere in M ofdimension q in such a way that the order of πq M does not increase.
Now let us return to the proof of Theorem 6.19. Let p be the largestprime which divides the order of πq M. We may perform a series ofsurgeries without increasing the order of πq M to kill πq M ⊗Zp, seeExercise 6.15. Then πq M is not divisible by p anymore. Therefore sucha series of surgeries decreases the order of πq M. We may continueby induction to kill πq M. When πq M is trivial, the manifold M is ahomotopy sphere.
6.4 Solutions to exercises
Solution to Exercise 6.12. We need to show that the group πm+1(M, M0)
is isomorphic to Z, and that it is generated by the class [Dλ] of the in-

80 elements of surgery theory
21 The following theorem appears for ex-ample as Proposition 4.28 in [Ha02].
Theorem 6.21. If a CW pair (X, A) is r-connected and A is s-connected, with r, s ≥0, then the map πi(X, A) → πi(X/A) in-duced by the quotient map X → X/A is anisomorphism for i ≤ r + s and a surjectionfor i = r + s + 1.
clusion of the disc Dλ in hq whose boundary is the meridian of ∂hq.
Since M is q− 1 connected, the same is true for M0, and therefore, thepair (M, M0) is q− 1 connected. Indeed, removing a tubular neighbor-hood of a sphere of dimension q from M results in a q− 1 connectedmanifold M0; generically any homotopy in M of a sphere of dimension≤ q− 1 in M0 misses the removed sphere by general position. Thus,M0 is q− 1 connected. By the long exact sequence, the pair (M, M0) isalso q− 1 connected. In fact, πq(M, M0) ≈ πq(M/M0) for i ≤ 2q− 2.21
Since the CW-complex M/M0 is the same as the CW-complex hq/∂hq,we conclude that in degrees ≤ 2q − 2, the homotopy groups of thepairs (M, M0) and (hq, ∂hq) are the same. On the other hand, we claimthat π∗(hq, ∂hq) is trivial for ∗ ≤ q and is isomorphic to Z for ∗ = q+ 1.To prove this, use the homotopy exact sequence of the pair (hq, ∂hq):
→ πi+1(hq, ∂hq)→ πi(∂hq)→ πi(hq)→ .
Note that πi(∂hq)→ πi(hq) is surjective, and therefore
πi+1(hq, ∂hq) ≈ πi(Sq × Sq)/πi(Sq × 0).
Consequently, the group πq(M, M0) is isomorphic to Z.
Solution I to Exericse 6.15. We will give an argument using homologygroups. Since the manifold M is (q− 1)-connected, the groups πq Mand Hq M are isomorphic. By the Universal Coefficient Theorem, thenthe group Hq(M; Zp) is also isomorphic to πq M ⊗Zp. Similarly, wethere is an isomorphism Hq(M′; Zp) ≈ πq M′ ⊗Zp. We will denotethe class λ⊗ 1 simply by λ, and similarly the class λ′ ⊗ 1 by λ′. By thePoincare duality theorem, the pairing
Hq(M; Zp)⊗ Hq+1(M; Zp) −→ Zp
is non-degenerate. In particular, since the class λ is non-trivial, thereexists a class µ such that λ · µ = 1. We may represent the class µ by achain Dλ + C with coefficients in Zp, where C is a linear combinationof cells in M0. Then ∂C is a chain representing the class λ′. Thereforeλ′ is trivial in Hq(M′; Zp). Finally, we have isomorphisms
Hq(M; Zp)/〈λ〉 ≈ Hq(M′; Zp)/〈λ′〉 = Hq(M′; Zp),
which completes the proof.
Solution II to Exercise 6.15. The argument in terms of homology groupsis similar to one for homotopy groups. Indeed, the homology group

surgery on framed manifolds 81
22 Consider the map SOr+1 → Sr whichtakes a rotation ϕ to the point ϕ(e1) onthe sphere Sr . The fiber of this fibrationis SOr . Therefore, there is a long exactsequence
πr−1(Sr)→ πr−2(SOr)→ πr−2(SOr+1)
which implies, by induction, that thehomomorphism πqSOq+2 → πqSOk+q+1induced by the inclusion is an isomor-phism.
Hq+1(M, M0; Zp) is infinite cyclic generated by a class [Dλ]. Considerthe long exact sequence
Hq+1(M; Zp)λ·−→ Hq(M, M0; Zp)
∂−→ Hq(M0; Zp)i∗→ Hq(M; Zp)→ 0
The kernel of i∗ is generated by λ′ = ∂[Dλ]. We deduce that
Hq(M; Zp)/〈λ〉 ≈ Hq(M0; Zp)/〈λ, λ′〉 ≈ Hq(M′; Zp)/〈λ′〉.
If λ is a generator of Hq(M; Zp), i.e., if λ is a non-trivial element,then the homomorphism λ· is surjective. Consequently, the map ∂
is trivial. Since λ′ = ∂[Dλ] is trivial, we deduce that Hq(M′; Zp) ≈Hq(M; Zp)/〈λ〉. By the Universal Coefficient Formula and the Hurewiczisomorphism, we have Hq(M; Zp) = πq M⊗Zp.
Solution to Exercise 6.16. Suppose that (D; τ) is a base of framed surgeryalong ∂D = Sλ where τ is the set τ1, ..., τk+q+1 of perpendicular vec-tor fields. The base of framed surgery consists of a base of surgery(D; τk+1, ..., τk+q+1) as well as additional perpendicular vector fieldsτ1, ..., τk+1 over D that agree over ∂D = Sλ with the frame vectorfields of the manifold M in Rm+k × 0. Given another base of framedsurgery (D; τ′1, ..., τ′k+q+1), we may form the difference function ω : Sq →SOk+q+1 by letting ω(x) be the rotation that brings each vector field τi
to τ′i for every point x ∈ Sq = Sλ. Note that if we let x vary overall points x ∈ D, then we get an extension of ω over a disc, whichimplies that ω is null-homotopic. Conversely, every null-homotopicmap ω : Sq → SOk+q+1 can be used to construct a new base of framedsurgery out of (D; τ), by defining new vector fields τ′i = ωτ over Sλ
and then extending them over D.
Suppose now that we are given a base of framed surgery (D, τ) aswell as a new base of surgery corresponding to a difference functionw : Sq → SOq+1. As we have seen, the new base of surgery can belifted to a base of framed surgery only if the composition ω of w andthe inclusion SOq+1 → SOk+q+1 is null-homotopic.
Exercise 6.22. Prove that [w] is in the kernel of the homomorphism
πqSOq+1i−→ πqSOk+q+1 induced by the inclusion if and only if it is in
the kernel of the homomorphism πqSOq+1 → πqSOq+2 induced by theinclusion. 22
The map i in Exercise 6.22 appears in the long exact sequence
πq+1Sq+1 ∂−→ πqSOq+1i−→ πq SOq+2.

82 elements of surgery theory
23 There is a pair of fibrations:
SOq+1 //
p
SOq+2 //
Sq+1
Sq // V2(R
q+2) // Sq+1
of a fibration. Let 1 denote the generator of πq+2Sq+2. Since the ker-nel of i coincides with the image of ∂, we have proved the followinglemma.
Lemma 6.23. The base of surgery with difference function w can be lifted toa base of framed surgery if and only if [w] ∈ πqSOq+1 is a multiple of ∂(1).
The boundary of the solid torus neighborhood Sq × Dq+1 of Sλ is dif-feomorphic to the torus Sq × Sq with meridian m and longitude l, seeFigure 6.3. We will identify the longitude with the set (x, τk+1)where x ranges over Sq, and where τk+1 is a frame vector in the baseof framed surgery (D; τ).
Lemma 6.24. Suppose that [w] = ∂(1). In particular w is the differencefunction for two bases of surgery (D, τ) and (D, τ′) which lifts to a differencefunction for two bases of framed surgery. Then w(m) = m and w(l) =
l+ 2m.
Let us study the map w. Consider its restriction, denoted by the samesymbol, w : Sq × Sq −→ Sq × Sq. Let’s compute its action on homologygroups. The meridian m is clearly preserved, but the longitude l is not.Recall that w belongs to the kernel of the homomorphism of homotopygroups of the inclusion
SOq+1 −→ SOq+2 −→ · · · −→ SOq+1+k.
In the sequence of inclusions, each map is the fiber map of a fibrationover Sq+i. Thus all this inclusions except for the first one are q + 1-connected. Thus, w belongs to the kernel of the inclusion i in thediagram
πq+1Sq+1 ∂−→ πqSOq+1i−→ πq SOq+2.
Consequently, w belongs to the image of ∂. Let 1 be the generatorof πq+2Sq+2 = Z. Then w is a multiple of ∂(1). We are interestedin seeing how SOq+1 acts on Sq+1. There is a map p from SOq+1 toSq+1 that associates to a rotation r the vector r(e1). In fact, there is acommutative diagram: 23
πq+1Sq+1
=
∂ // πq SOq+1 //
p∗
πq SOq+2
πq+1Sq+1 // πqSq // πqV2(R
q+2)

surgery on framed manifolds 83
We are interested in p∗∂(1), and by the commutativity of the diagramwe see that it is multiplication by 2. Thus w(l) = l + 2m. In otherwords, m′ = m and l′ = l+ 2m.

1 It is also common to say that the tripleξ = (E, X, π) is a vector bundle, or eventhat E is a vector bundle.
7
Characteristic classes of vector bundles
7.1 Vector bundles over topological spaces
Fix a non-negative integer n ≤ m + k. Let f be a function on a topo-logical subspace X in Rm+k that associates with each point x in X anaffine n-space Ex ⊂ Rm+k containing the point x. Of course, each Ex isthen a vector space with origin at x. We will assume that f is contin-uous in the sense that over an open neighborhood U ⊂ Rm+k of everypoint x ∈ X there are n continuous vector fields v1, ..., vn such that theaffine space Ey is the span of the vectors v1(y), ...., vn(y) for every pointy in X ∩U.
We may think of the function f from a fairly different perspective.To begin with, the union E of the affine subspaces Ex is a subspaceof Rm+k ×Rm+k of pairs (x, v) of points x ∈ X and vectors v ∈ Ex.Forgetting the second component in (x, v) defines a continuous mapπ : E → X, called a vector bundle. The space E is called the total space,X the base space, and π the projection of the vector bundle.1 The vectorspaces Ex = π−1(x) are called the fibers, while the dimension n offibers Ex is said to be the dimension of the vector bundle.
We have already seen some important examples of vector bundles. Say,the tangent bundle TM of a manifold M is a vector bundle. Its totalspace E = TM consists of pairs (x, v) of points in M and vectors vtangent to M at x. Another important example of a vector bundle isthe perpendicular vector bundle T⊥M. Its total space consists of pairs(x, v) of points x in M and vectors v perpendicular to Tx M at x. Givena topological space X in the horizontal subspace Rm+k of Rm+k ×Rn,the space εn of pairs (x, v) of points x ∈ X and vertical vectors v is

characteristic classes of vector bundles 85
2 A map f : E → F of vector bundles isfiberwise preserving if for every point x ∈X there is a point y ∈ Y such that f sendsthe fiber Ex to the fiber Fy.
the total space of another, so-called trivial, vector bundle over X ofdimension n.
Many operations on vector spaces extend to operations on vector bun-dles. For example, if E and F are vector bundles over a topologicalspace X in Rm+k such that the fibers Ex and Fx share no non-zero vec-tors for each x ∈ X, then E⊕ F is the vector bundle over X that consistsof the family of vector spaces Ex ⊕ Fx.
A map f : E → F of a vector bundle over a topological space X intoa vector bundle over a topological space Y is a continuous fiberwisepreserving map2 of topological spaces such that f |Ex is a linear homo-morphism Ex → Ey of vector spaces for y = y(x) and each x. We saythat f is injective, surjective, or an isomorphism if each f |Ex is.
Let f : X → Y be a map of a topological space X ∈ Rm to a topologicalspace Y ∈ Rn. We may place X in Rm ×Rn by sending x to (x, f (x)).Then the map f is the projection of X to Y in the sense that it is givenby (x, y) 7→ y. Given a vector bundle F over Y, the so-called pullbackvector bundle E = f ∗F is the vector bundle that consists of the familyEx of spaces Ex = x × Ff (x) parametrized by x ∈ X.
7.2 Characteristic classes of vector bundles
Let us recall that a CW complex X is constructed by induction bymeans of its skeleta. The the 0-th skeleton X(0) of X consists of a dis-crete set of points. When the k-th skeleton X(k) has been constructed,one chooses attaching maps ϕα : ∂Dk+1
α → X(k), and defines X(k+1) tobe the union of X(k) and the discs Dk+1
α subject to the identificationx = ϕα(x) for each x ∈ ∂Dk+1
α . We say that X(k+1) is obtained fromX(k) by attaching the discs ∂Dk+1
α along their boundaries by means ofattaching maps ϕα. The CW complex X is the union of all its skeleta.
Every smooth manifold has a structure of a CW-complex. A CW-structure on a manifold M allows us to define cellular cohomologyof M with coefficients in R. We will be interested in the cases whereR is either Z, Z2 or Q. Let us briefly review the definition. A k-thcochain on M is a function that associates with each cell Dk
α a value inR. The set of cochains forms a free group Ck(M) under the operationof taking the sum of functions. There is a so-called coboundary homo-morphism δk : Ck(M) → Ck+1(M). The cochains in the group Im δk−1
are said to be coboundaries, while the cochains in the group Ker δk are

86 elements of surgery theory
3 For proofs of the mentioned propertiesof the Euler class, see references in thesection Further Reading.
4 Hint for Exercise 7.1. Indeed, choosea vector field v in TM that is trivial at aunique point x. Then, by a definition ofthe Euler characteristics χ(M) of M, theindex of the singular point x of v is thenumber χ(M). On the other hand, wemay choose a CW-structure on M so thatthe point x is the center of an m-cell. Bythe definition of the index of a singularpoint of a vector field, the cochain e asso-ciates with all m-cells of M the value 0,except for the m-cell containing x, withwhich e associates the value χ(M).
cocycles. The k-th cohomology group of M is defined to be the factorgroup ker δk/ im δk−1. In other words, a cohomology class is a cocycledefined up to coboundaries.
7.2.1 The Euler class
Given an oriented vector bundle ξ = (E, M, π) of dimension n over amanifold of dimension m, the Euler class e(ξ) is a cohomology classin Hn(M) with coefficients in Z. It is the obstruction to constructing aunit vector field v over M such that for each x ∈ M the vector v(x) isin the plane Ex.
When possible, the vector field is constructed by induction over thesubsequent skeleta of M. To begin with, there is a vector field v overthe discrete set of points M0. Suppose that the vector field has beenconstructed over the (k − 1)-st skeleton of M. To extend it over thenext skeleton, consider a cell Dk
α of dimension k. Note that since theboundary of Dk
α is in the (k− 1)-st skeleton, the vector field v has beenconstructed over ∂Dk
α.
We note that the vector bundle ξ over the disc Dkα is trivial, i.e., the
total space of ξ over Dkα is Dk
α ×Rn while the vector bundle projectionis one onto the first factor. Therefore any vector field of ξ over Dk
α canbe identified with a function Dk
α → Rn. Similarly, a unit vector fieldis a function Dk
α → Sn−1. In particular, the unit vector field v extendsfrom ∂Dk
α over the disc Dkα if and only if the corresponding function
∂Dkα → Sn−1 extends to a function Dk
α → Sn−1.
If k < n− 1, then any map of the sphere ∂Dkα to Sn−1 extends to a map
of the disc Dkα. Therefore, there is no obstruction to constructing the
unit vector field v over the (n− 1)-st skeleton of M. When k = n, themap ∂Dn
α → Sn−1 extends over the disc Dnα if and only its degree dα
is 0. We define the obstruction cochain e ∈ Cn(M) by associating witheach cell Dn
α the degree dα. It follows that the obstruction cochain eis actually a cocycle, representing a cohomology class e(ξ). The coho-mology class e(ξ) neither depends on the CW-structure on M, nor onthe choice of the vector field v over the (n− 1)-skeleton of M.3
Exercise 7.1. Suppose that the vector bundle ξ is the tangent bundleof the manifold M. Show that under an appropriate correspondenceHm(M) ≈ Z the Euler class e(ξ) corresponds to the Euler characteris-tics χ(M) = e(ξ)[M] of the manifold M.4

characteristic classes of vector bundles 87
5 Recall that j− 1 = n− k.
6 Compare the definition of e(M) withthat of wm(M) to see that wm(M) is themod 2 reduction of the Euler class.
7.2.2 Stiefel-Whitney classes
Let ξ = (E, M, π) be a vector bundle of dimension n over a manifoldof dimension m. We will define a cohomology class wj(ξ) on M withcoefficients in Z2 which is an invariant describing the vector bundle ξ.If we put n− k = j− 1, then wj(ξ) is the obstruction to the existenceof k vector fields over the j-th skeleton.
More precisely, there exist k orthonormal vector fields of ξ over the(n− k)-skeleton M(n−k) of M. Indeed, to begin with, the vector bundleξ admits a unit vector field v1 over M(n−1). Let ξ/〈v1〉 be the vectorbundle of dimension n − 1 over M(n−1) that consists of vectors in ξ
orthogonal to v. The vector bundle ξ/〈v1〉 admits a unit vector fieldv2 over M(n−2). Continuing by induction, we construct k orthonormalvector fields v1, v2, ..., vk of ξ over M(j−1).5
Let Djα be a cell of dimension j in M. Its boundary is in the skele-
ton M(n−k), over which there are k orthonormal vector fields. In fact,the vector fields v1, ..., vk−1 has been constructed over M(j), and, inparticular, over Dj
α. We are to determine an obstruction to extendingover Dj
α the vector field vk in the vector bundle ξ/〈v1, ..., vk−1〉. Wemay identify the vector field vk over the boundary ∂Dj
α with a func-tion fα : ∂Dj
α → Sj−1. By definition, the cochain wj(ξ) associates with
Djα the degree of fα mod 2. It can be shown that the cochain wj(ξ)
is a cocycle which neither depends on the CW-structure of M nor onthe choices of vector fields. Therefore, the cochain wj(ξ) represents acohomology class, which we also denote by wj(ξ).
When ξ is the tangent bundle of the manifold M, we simply writewj(M) instead of wj(TM). It is also convenient to write w(ξ) for theformal linear combination 1 + w1(ξ) + w2(ξ) + · · · .
Example 7.2. The class w1(M) is the obstruction to the existence of mlinearly independent tangent vector fields over the 1-skeleton of M. Inother words, w1(M) = 0 if and only if the manifold M is orientable.
Example 7.3. The class wm(M) is an obstruction to constructing anowhere zero tangent vector field over M. It follows that wm(M) = 0if and only if the Euler characteristics of M is even.6
It is remarkable that Stiefel-Whitney classes can completely be de-scribed by their four axioms:

88 elements of surgery theory
7 In particular, the Axiom II asserts thatwhen f : X → Y is an inclusion, the classw(E) is the restriction of the class w(F)to X. Axiom II can also be stated asw( f ∗F) = f ∗w(F).
8 Indeed, by the Axiom I the class w(γ)is of the form 1 + λa for some λ ∈ Z2.By Axiom II, the class w(γ) restrictsover RP1 ⊂ RPn to the total Stiefel-Whitney class of the non-trivial line bun-dle. Therefore, λ = 1 by Axiom IV.
9 The vector bundle (n + 1)γ consists ofequivalence classes of pairs (x, y) wherex ∈ Sn and y ∈ Rn+1 subject to theidentification (x, y) = (−x,−y). Clearly,TRPn ⊂ (n + 1)γ, while the quotient ofthe two bundles is the trivial line bundlethat consists of pairs (x, y) with y = λxfor λ ∈ R subject to the identification(x, λx) = (−x, λ(−x)).
10 Note that w1 6= 0 means that RP2 isnon-orientable, while w2 6= 0 means thatthe Euler characteristics of RP2 is odd.In the calculation we implicitly used that3 ≡ 1 mod 2 and that x3 is a class in thezero cohomology group H3(RP2).
Axiom I: For each vector bundle E→ X, there are cohomology classes wi(E) ∈Hi(X; Z2) such that w0(E) = 1 and wi(E) = 0 for all i greater thanthe dimension of the fiber bundle E.
Axiom II: Let E → X and F → Y be two vector bundles. Suppose that for acontinuous map f : X → Y there is a fiberwise isomorphism E → Fof vector bundles sending each vector space Ex isomorphically toFf (x). Then w(E) = f ∗w(F).7
Axiom III: Formally, given two vector bundles E and F over a topological spaceX, there is an equality w(E⊕ F) = w(E)w(F).
Axiom IV: For the non-trivial vector bundle E of dimension 1 over the circleS1, the class w1(E) is non-trivial.
Example 7.4. Let us recall that RPn is the quotient of the sphere Sn
of unit vectors x in Rn+1 under the identification x = −x. Its tangentbundle TRPn consists of equivalence classes of pairs of vectors (x, y)where x ∈ Sn and y ∈ Rn+1 is orthogonal to x, subject to the identifi-cation of (x, y) and (−x,−y). Similarly, the canonical vector bundle γ
consists of equivalence classes of pairs (x, α) where x ∈ Sn and α ∈ R,subject to the identification (x, α) = (−x,−α), where the vector spaceγx over the point [x] in RPn consists of vectors αx at x that are iden-tified with vectors (−α)(−x) at −x. Note that we may also representthe trivial bundle ε over RPn by the space of pairs (x, α) subject tothe identification (x, α) ∼ (−x, α) where the vector space εx consists ofvectors αx at x that are identified with vectors α(−x) at −x. The trivialvector bundle ε has a nowhere zero vector field x 7→ (x, 1).
The Axioms I, I I and IV actually imply that for the canonical vectorbundle γ over RPn the total Stiefel-Whitney class w(γ) is 1 + a, wherea is the generator of the first cohomology group of RPn.8 On theother hand, the vector bundle TRPn ⊕ ε over RPn is isomorphic to(n + 1)γ = γ⊕ · · · ⊕ γ. 9 In particular, by the Axioms I and I I I, thetotal Stiefel-Whitney class of RPn is
1 + w1 + w2 + · · · = (1 + a)n+1.
For example, since (1 + x)3 = 1 + 3x + 3x2 + x3, the Stiefel-Whitneyclasses of RP2 are w1 = x and w2 = x2. 10

characteristic classes of vector bundles 89
11 Note that since Chern classes are evendimensional classes, the identity impliesthat all odd dimensional Stiefel-Whitneyclasses of a complex vector bundle aretrivial. To prove the statement of Ex-ample 7.6, observe that the existence ofk linearly independent complex vectorfields v1, ..., vk implies the existence of2k linearly independent real vector fieldsv1, iv1, ..., vk , ivk .
7.2.3 Chern classes
A complex structure on a vector bundle ξ over a manifold M is a choiceof a fiberwise homomorphism F : ξ → ξ that satisfies the condition thatF F = − Id. The homomorphism F plays the role of a multiplicationby the complex number i so that every fiber of ξ is isomorphic to Cn
where n is the complex dimension of fibers of ξ. We will occasionallywrite iv for F(v).
For a complex vector bundle ξ, i.e., a vector bundle with a fixed com-plex structure, we may define cohomology classes cj(ξ) as obstructionsto extending k = m− j + 1 complex linearly independent vector fieldsfrom the (2j− 1)-st skeleton of M to its 2j-th skeleton. In contrast tothe Stiefel-Whitney classes wj, the Chern classes cj(ξ) are cohomol-ogy classes of degree 2j with coefficients in Z. Notice also that in thedefinition of the Chern classes the linear independence of vectors isconsidered to be over complex numbers.
Example 7.5. The class cn(ξ) is the obstruction to the existence of anowhere zero vector field in ξ. Therefore cn(ξ) is the Euler class of thecomplex vector bundle ξ.
Example 7.6. When ξ is a complex vector bundle, the coefficient re-duction Z → Z2 reduces the total Chern class 1 + c1 + c2 + · · · to thetotal Stiefel-Whitney class 1 + w1 + w2 + · · · . 11
As in the case of Stiefel-Whitney classes, there is an important formulafor the Chern classes of the complex projective space CPn:
1 + c1 + c2 + · · · = (1 + e)n+1
where e is an appropriate generator of H2(CPn) ≈ Z.
7.2.4 Pontryagin classes
When ξ is a real vector bundle over M, we may use the fiberwise tensorproduct with C to construct a complex vector bundle ξ ⊗ C over M.By definition the k-th Pontryagin class of ξ is the cohomology classpk(ξ) = (−1)kc2k(ξ ⊗C) of degree 4k with coefficients in Z.
If the vector bundle ξ is already complex, then we may calculate boththe Chern and Pontryagin classes of ξ. There is an identity:
1− p1 + p2 − · · · = (1− c1 + c2 − · · · )(1 + c1 + c2 + · · · ).

90 elements of surgery theory
This identity implies that the Pontryagin classes of CPn satisfy theformula
1 + p1 + p2 + · · · = (1 + e2)n+1.
Finally, the coefficient homomorphism Z→ Q turns Pontryagin classesto rational Pontryagin classes pk(ξ) ∈ H4k(M; Q).
7.3 The Thom theorem on orientable cobordism groups
The set of cobordism classes of oriented closed manifolds of dimen-sion m forms a group Ωm with the disjoint union operation. Its zeroelement is represented by the class of the empty manifold, while theinverse of the class of a manifold M is the class of the manifold Mtaken with the opposite orientation. Note that the class of the emptymanifold is represented by any oriented closed manifold of dimensionm bounding a manifold of dimension m + 1.
Exercise 7.7. Show that Ω1 = Ω2 = 0.
In fact, the groups Ωm for m ≥ 0 form a ring Ω. In terms of represen-tatives, the operation is given by taking the product of manifolds. Thering Ω⊗Q is completely known.
Theorem 7.8. The ring Ω⊗Q is the polynomial ring Q[CP2, CP4, CP6, ...].
For example, the group Ω4 ⊗Q is generated by the cobordism classesof manifolds CP2 × CP2 and CP4, while the group Ω5 ×Q is trivial.Furthermore, the cobordism class in Ω4m ⊗R of a manifold M is com-pletely determined by the Pontryagin numbers of M, i.e, the numberspi1 · · · pik [M] where pij are Pontryagin classes with i1 + · · · ik = m.
Theorem 7.9 (Thom). Two closed orientable manifolds represent the sameclass in Ω⊗Q if and only if all their Pontryagin numbers are the same.
Theorem 7.9 implies that any invariant of cobordism classes can beexpressed in terms of Pontryagin numbers. We have seen that thesignature of an oriented closed 4m-manifold does not change undercobordisms. Hence, it is determined by the Pontryagin classes, i.e.,σ(M) = Lm(p1, ..., pm)[M] for some polynomial Lm. Using the mul-tiplicative properties of Lm and the fact that the signature σ = 1 onthe generators CPi1 × · · · ×CPik of Ω∗ ⊗R, Hirzebruch computed allpolynomials Lm.

characteristic classes of vector bundles 91
12 Hint for Exercise 7.10. Let p(M) = 1+p1(M) + p2(M) + · · · be the formal sumof Pontryagin classes of a manifold M.Recall that p(CPn) = (1 + e2)n+1 wheree is the generator of H2CPn. We have
p(CP2) = (1 + e2)3 = 1 + 3e2,
p(CP4) = (1 + e2)5 = 1 + 5e2 + 10e4.
Since there is no torsion,
p(CP2 ×CP2) = p(CP2)p(CP2) =
= (1 + e21)
3(1 + e22)
3
1 + (3e1 + 3e2) + (3e41 + 9e2
1e22 + 3e4
2).
Thus, one deduce the table of values:
CP2 ×CP2 CP4
p21 18e2
1e22 25e4
p2 9e2z e2
2 10e4
Evaluate L2 = a1 p21 + a2 p2 on CP4 and
CP2 ×CP2 to find a1 and a2.
13 Indeed, there is a fibration π : Uk+1 →S2k+1 that associates with a unitarytransformation h the image h(e1) of thefirst coordinate vector. The fiber of thefibration is the unitary transformationUk of the remaining coordinate vectors.Thus, from the exact sequence of the fi-bration we deduce that πiUk = πiUk+1for i < 2k.
14 It is easy to relate the number [ fξ ]with the number [ fξ⊗C] Indeed, considerthe exact sequence of the fibration U →U/SO with fiber SO:
π4qU/SO→ π4q−1SO→ π4q−1U→ π4q−1U/SO.
The first three groups are 0 → Z → Z,while the last group is either 0 when qis even, or Z2 when q is odd. Thus, thehomomorphism i∗ induced by the inclu-sion i : SO → U takes [1] ∈ π4q−1SO to[aq], where aq is 1 when q is even, and aqis 2 when q is odd. Finally, since fξ⊗C =i fξ , we deduce that [ fξ⊗C] = aq[ fξ ].
Exercise 7.10. Prove that L1 = p1/3 and L2 = (7p2 − p21)/45. 12
7.4 Example: Pontryagin classes of almost framed manifolds
In what follows we will need the following example of Kervaire-Milnor,which the reader may skip in the first reading.
Let ξ be a real vector bundle of dimension n over a manifold M ofdimension 4q < n. Suppose that ξ admits n orthonormal vector fieldsover the closure M0 of the complement to a closed disc D ⊂ M. Thenξ can be sued by means of a clutching function fξ : ∂D → SOn fromD×Rn and M0 ×Rn by identifying (x, v) ∈ D×Rn with (x, fξ(v)) ∈M0×Rn. The map fξ itself represents an element [ fξ ] in the homotopygroup π4q−1SOn = Z.
Since there are already n independent vector fields over M0, the Pon-tryagin classes p1, ..., pq−1 of the vector bundle ξ are trivial. Let uscalculate the class pq(ξ). We will need information about the homo-topy groups of the unitary group Uk. To begin with, πiUk = πi(Uk+1)
when i < 2k.13 In other words, the homotopy groups of Uk stabilizeas k tends to infinity. The stable groups are denoted by πi(U). It isknown that πi(U) is trivial for i even, and it is Z otherwise. In theborder case i = 2k, we have πiUk = Zk!. The homotopy groups ofUk/SOk also stabilize, and for j > 2 the groups πj(U/SO) = πj−2SOdepend only on the residue class of j mod 8. Namely, for the residueclasses 0, ..., 7 the homotopy groups are 0, Z, Z2, Z2, 0, Z, 0, 0.
Following the definition of pq, we replace the real vector space ξ withits complex counterpart ξ ⊗ C, and observe that ξ ⊗ C is built fromD × Cn and M0 × Cn by means of a clutching function fξ⊗C, whichrepresents an element [ fξ⊗C] in π4q−1Un.14 In fact the clutching func-tion fξ⊗C is the composition of the clutching function fξ : S4q−1 → SOn
and the inclusion SOn → Un. By definition, pq(ξ) = (−1)qc2q(ξ ⊗C).Now, following the definition of c2q, we assume that n − 2q vectorfields have been constructed over M, and an additional vector fieldv have been constructed over M0, and, in particular, over ∂D. Thecochain c2q may associate a non-trivial value only with D. Over D thevalue of c2q is the obstruction to extending v from ∂D over D. Fur-thermore, ξ ⊗C restricts over D to a trivial vector bundle D×Cn, andwe may assume that the (n− 2q) vector fields over D are the coordi-nate vector fields in D×Cn−2q. Thus, we need to extend v in D×C2q.

92 elements of surgery theory
15 Indeed, consider the long exact se-quence
π4q−1U2q → π4q−1S4q−1 → π4q−2U2q−1 → π4q−2U2q
of the fibration π : U2q → S4q−1. It trans-lates to
Z→ Z→ Z(2q−1)! → 0,
which proves the claim.
16 We only need to use use the equality[ fξ⊗C] = aq[ fξ ].
Consequently, the obstruction is the degree of the composition
∂Dfξ⊗C−−→ U2q
π−→ S4q−1,
where the second map π associates with a transformation h the imageh(e1) of the first coordinate vector. From the long exact sequence of thefibration π, it follows that the degree of the composition is (2q− 1)!.15
Thus, the q-th Pontryagin number of ξ is pq(ξ)[M] = (2q− 1)![ fξ⊗C],where [ fξ⊗C] is an integer in π4q−1U2q = Z. Finally, let us expresspq(x) in terms of the clutching function fξ .16
Theorem 7.11. Let M be a manifold of dimension 4q, and ξ a vector bundleof dimension n > 4q over M that admits n orthonormal vector fields over thecomplement to a point. Then pq(ξ)[M] = aq(2q− 1)! · [ fξ ], where aq = 2when q is odd, and aq = 1 otherwise.

Figure 8.1: John Milnor
8
Exotic spheres: discovery of exotic spheres S7
In fifties Milnor surprised mathematical community with a remark-able discovery of exotic spheres. These are smooth manifolds that arehomeomorphic but not diffeomorphic to the standard sphere S7. Inthis chapter we will go over the Milnor’s surprising discovery.
Though the geometric construction of exotic spheres is quite explicit,we will still need to perform calculations of algebraic invariants—suchas the signature of a manifold—for which we will need new algebraictechniques. To this end, we will introduce the notion of the vectorbundle (§7.1), characteristic classes of vector bundles (§7.2), and statewithout a proof the Thom theorem on the cobordism group of ori-entable manifolds (§7.3).
The reader familiar with characteristic classes may skip the first threeintroductory sections and go directly to section 8.1 where we give geo-metric interpretations of maps SU(2) → SO(3) and Spin(4) → SO(4).Milnor used these two maps to construct a number of exotic spheres ofdimension 7. We cover Milnor’s construction in detail in the last twosections of the chapter. The presented line of reasoning is the same asin the original paper by Milnor, though the emphasis in the present ex-position is to explicit geometric constructions rather than to algebraicproofs.
Later we will see other constructions of exotic spheres which might besimpler than the origin construction by Milnor.

94 elements of surgery theory
1 To prove the claim, notice that the de-terminant of the matrix representing thequaternion a + bi + cj + dk is preciselya2 + b2 + c2 + d2 = 1.
2 We will prove in the next subsectionthat even a more general transformationis a rotation. On the other hand, for thevector (b, c, d) = A − a we have A(A −a)A−1 = AAA−1 − A(−a)A−1 = A− a,which means that the rotation defined byA preserves the vector A− a, and there-fore, the transformation of X 7→ AXA−1
is a rotation in the plane perpendicularto (b, c, d).
3 The transformation X 7→ IXB is givenby [
a + id ∗b + ic ∗
]7→[
a + id ∗b + ic ∗
] [eiθ 00 e−iθ
]=[
(a + id)eiθ ∗(b + ic)eiθ ∗
]
4 The transformation X 7→ AXI is givenby [
a + id ∗b + ic ∗
]7→[
eiθ 00 e−iθ
] [a + id ∗b + ic ∗
]=[
(a + id)eiθ ∗(b + ic)e−iθ ∗
]
8.1 Maps of SU(2) and Spin(4) to orthogonal groups
We may represent the quaternions 1, i, j and k respectively by the ma-trices [
1 00 1
],
[0 −11 0
],
[0 ii 0
],
[i 00 −i
].
In particular, the quaternion a + bi + cj + dk is represented by the ma-trix [
a + id −b + icb + ic a− id
].
One of the nice properties of this map is that the unit sphere S3 =
a2 + b2 + c2 + d2 = 1 in the space of quaternions becomes the unitarygroup SU(2).1
8.1.1 The map SU(2)→ SO(3)
To define the map SU(2)→ SO(3), let us identify the space R3b,c,d with
the space of so-called pure quaternions bi + cj+ dk. Then a quaternionA ∈ SU(2) of length 1 defines a transformation of R3 by the ruleX 7→ AXA−1. This transformation is actually a rotation.
Exercise 8.1. Show that the transformation X 7→ AXA−1 is a rotation.Show that it preserves the vector (b, c, d), and therefore it is a rotationin the plane perpendicular to (b, c, d). Show that the angle θ of rotationis determined by a = cos( 1
2 θ), where the rotation is performed in thecounterclockwise direction when viewed from the tip of the vector(b, c, d). 2
8.1.2 The map Spin(4)→ SO(4)
We are interested in the group Spin(4) = SU(2) × SU(2) acting onthe space R4 of 2× 2-matrices with basis 〈1, i, j, k〉. The action of anelement (A, B) on a matrix X ∈ R4 is X 7→ AXB. Notice that anelement (A, B) is the product of pairs (A, I) and (I, B). Furthermore,in appropriate basis with coordinates a, b, c, d, the matrix B ∈ SU(2)is diagonal with elements eiθ and e−iθ on the diagonal. With respectto this basis, the action of (I, B) is easily described.3 It is a rotationthrough the angle θ in the planes (a, d) and (b, c). The action of (A, I)is similar.4 If the basis is chosen so that A is diagonal with elements eiϕ

exotic spheres: discovery of exotic spheres s795
and e−iϕ on the diagonal, then (A, I) rotates the plane (a, d) throughthe angle ϕ, and rotates the plane (b, c) through the angle −ϕ.
In other words, each of the two pairs (A, I) and (I, A) define rotationsin two orthogonal planes, say P1 and P2, in R4. Furthermore, since thetwo planes are the same for the rotation determined by any element(Ah, Ai), in order to determine P1 and P2 we may assume that h = 1and i = −1. The rotation (A, A−1) rotates P1 through the angle 2θ andfixes any vector in the plane P2. On the other hand, when the action of(A, A−1) is restricted to R3, we have already found that it is a rotationin the plane orthogonal to the vector (b, c, d), where A = (a, b, c, d).Thus, in general the plane P1 is the plane in R3 orthogonal to theimaginary part of A, while P2 is its orthogonal complement.
Let us now briefly calculate the angle of rotation θ of (I, A). In thediagonalizing basis, the diagonal elements of A ∈ SU(2) are eiθ ande−iθ . In particular, its characteristic polynomial is λ2−λ(eiθ + e−iθ)+ 1.On the other hand, in the standard basis the characteristic polynomialis λ2 − 2aλ + 1, which implies that a = cos θ.
It is worth mentioning that the map Spin(4) → SO(4) is a homomor-phism with kernel that consists of two elements: (I, I) and (I,−I).
8.2 Milnor’s fiber bundles
Milnor introduced a family of maps fij : SU(2) → SO4. The action offij(A) on the space R4 is that of (Ah, Aj). In other words, as before,the quaternion A defines two orthogonal planes P1 and P2 in R4, whilethe element fij(A) rotates the plane P1 through the angle (h + j)θ, androtates the plane P2 through the angle (j− h)θ.
We may use the map fhj as a clutching function to sue a vector bundleξhj of dimension 4 over S4. To this end, we only need to identifythe meridional sphere S3 ⊂ S4 with quaternions A of length 1. Wechoose the identification that extends to the identification of the upperhemisphere D4
+ of S4 with quaternions of length at most 1 given bythe standard projection D4
+ ⊂ R5 → R4.
There are interesting relations between the clutching functions fhj : S3 →SO(4). Notice that given two clutching functions fhj and fh′ j′ we maytake their sums as elements of the homotopy group π3SO(4). The re-sulting clutching function defines the fiberwise connected sum ξhj]ξh′ j′

96 elements of surgery theory
5 All homomorphisms in the exact se-quence have a clear geometric mean-ing. The homomorphism i postcom-poses a map Sn → S3 with the inclusionS3 ⊂ Mhj to produce a map Sn → Mhj.The homomorphism j represents a mapSn → Mhj as a map Dn → Mhj thatsends the boundary of Dn to S3. Finally,the homomorphism ∂ restricts such amap to the boundary of Dn and pro-duces a map ∂Dn → S3.
of vector bundles over S4. On the other hand, the two clutching func-tions can be multiplied pointwise by the product in SO(4) to producea new clutching function x 7→ fhj(x) fh′ j′(x).
We claim that the two operations on π3SO(4) are the same and there-fore lead to the same fiberwise connected sum. To prove the claim,choose a homotopy representative of the clutching function S3 →SO(4) for the vector bundle ξhj so that it is trivial over the upperhemisphere of S3, and for ξh′ j′ so that it is trivial over the lower hemi-sphere of S3. Then the two operations on π3SO(4) are clearly thesame.
Let Mhj denote the set of all vectors in ξhj of length 1. It is a smoothmanifold of dimension 7. The projection of ξhj restricts to a propersubmersion of the manifold Mhj to S4. The fiber of the restrictedsubmersion is S3 as it consists of vectors of length one in the fiber R4
of the vector bundle ξhj .
Theorem 8.2. The manifold Mhj is homeomorphic to a sphere if and only ifthe Euler number of the vector bundle ξhj is ±1.
Proof. Let S3 denote the fiber of the projection Mhj → S4 over thenorth pole of S4. There is a long exact sequence of homotopy groups5
· · · −→ πn(S3)i−→ πn(Mhj)
j−→ πn(Mhj, S3)∂−→ πn−1S3 −→ · · ·
Since the projection π : Mhj → S4 is a proper submersion, the groupπn(Mhj, S3) can be identified with the homotopy group πn(S4). Theidentification associates with a map f : Dn → Mhj that sends ∂Dn tothe fiber S3 a new map π f : Dn → S4 that sends the boundary of Dn
to the north pole of S4. Substituting πnS4 for the homotopy groups ofthe pair results in a so-called long exact sequence of the fibration π:
· · · −→ πn(S3)i−→ πn(Mhj)
j−→ πn(S4)∂−→ πn−1S3 −→ · · ·
Since πiS3 = πiS4 = 0 for i = 1, 2, we deduce that Mhj is at least 2-connected. Consider now the homomorphism ∂ : π4S4 → π3S3. Both,the source and target groups are isomorphic to Z. We claim that bychoosing appropriate orientations of the spheres, we may assume thatthe homomorphism ∂ is given by multiplication by the Euler numberof ξhj. Suppose for a moment that we have proven the claim. Then,the manifold Mhj is homeomorphic to a sphere if and only if it is 3-connected, which is equivalent to the requirement that ∂ is an isomor-phism. The latter is equivalent to the assertion that the Euler numberof ξhj is ±1.

exotic spheres: discovery of exotic spheres s797
Finally, let us prove the claim that the homomorphism ∂ : π4S4 → π3S3
is given by multiplication by e(ξhj). Recall that the standard generatorin π4S4 is given by the identity map of S4. Under the identificationof the group π4S4 with the group π4(Mhj, S3), the generator of π4S4
corresponds to a map v : D4 → Mhj which sends the boundary of D4
to S3. We recall that ∂(idS4) is precisely the degree of the map v|∂D4.We want to relate this number with e(ξhj).
Let S4 = D+ ∪ D− denote the decomposition of the sphere into thesouthern and northern hemispheres. The map v restricted to D− ⊂ D4,associates with each x ∈ D− a vector of length 1 in the fiber of ξhj overthe point x. In particular, the map v defines a vector field in ξhj overthe boundary ∂D+ = ∂D−. Since the fiber bundle ξhj over D+ is trivial,the vector field v over ∂D+ can be identified with a map ∂D+ → S3.On one hand side, by contracting D+ to the north pole of S4, we canidentify this map with v|∂D4. On the other hand side, by definition,the degree of the map ∂D+ → S3 is the obstruction to constructing aunit vector field in ξhj, i.e., it is the Euler number of ξhj.
8.3 The quaternionic Hopf fibration
We regard the sphere S7 to be the unit sphere in the quaternion spaceH2. The projective quaternionic space HP1 is defined to be the spaceof equivalence classes [x : y], where the pairs (x, y) and (λx, λy) repre-sent the same class for any quaternion λ. The quaternion Hopf fibra-tion is the map S7 →HP1 defined by (x, y) 7→ [x : y].
The projective quaternionic space HP1 is diffeomorphic to the sphereS4. Indeed, it is compact as the image of a compact space S7 and awayfrom one point [1 : 0] it is covered by a chart [x : 1] diffeomorphic toH. Thus HP1 is a one point compactification of H. The fiber is S3.Thus, the quaternionic Hopf fibration is a map S7 → S4 with fiber S3.
The quaternionic Hopf fibration can also be described slightly differ-ently. Let HP2 denote the projective quaternionic space of dimension 2with coordinates [x : y : z]. Remove a unit disc |x|2 + |y|2 < 1 from thethird coordinate chart [x : y : 1]. Then the fibration [x : y : z] → [x : y]restricts on the boundary sphere |x|2 + |y|2 = 1, z = 1 to the quater-nionic Hopf fibration. It is actually convenient to consider a slightlylarger fibration from HP2 \ [0 : 0 : 1] over HP1 with fiber H. We willrefer to this fibration as to the quaternionic disc fibration.

98 elements of surgery theory
6 We have seen that ξ10 → S4 is the pro-jection of HP2 \ [0 : 0 : 1] to the projec-tive space HP1 given by [x : y : z] →[x : y]. If we remove from HP2 theopen disc D8 of points [x : y : 1] with|x|2 + |y|2 < 1 then we obtain a mani-fold with boundary ∂D8 = S7, and theprojection S7 → HP1 given by (x, y) →[x : y]. The manifold S7 is precisely M10.
Let’s describe the clutching function for the Hopf fibration. The targetsphere HP1 consists of two discs: the disc |x| ≤ 1 in the first chart[x : 1], and the disc |y| ≤ 1 in the second chart [1 : y]. The transitionmap identifies [x : 1] with [1 : y], where y = x−1. Over the first disc,the quaternionic disc fibration consists of the points [x : 1 : z] with|x| ≤ 1. We may trivialize this H-fibration by a map [x : 1 : z] 7→ z.Similarly, we may trivialize the quaternionic disc fibration over thesecond disc by a map [1 : y : z] 7→ z. Finally, the clutching function isthe identity
[x : 1 : z] = [1 : x−1 : x−1z] = [1 : y : yz],
where, recall, the transition map from the boundary of the first disc tothe boundary of the second disc identifies [x : 1] with [1 : y] wheny = x−1. Thus, the clutching function S3 → SO(4) over a pointy ∈ S3 is given by z 7→ yz. This is the Milnor’s fiber bundle ξ1,0.
8.4 Invariants of Milnor’s fibrations
To begin with let’s calculate invariants of the fiber bundle ξ10. We haveseen that the manifold M10 of vectors in ξ10 of length 1 is a smoothsphere S7, and that the fiber of the projection S7 → S4 is S3. 6 ByTheorem 8.2, the Euler number of ξ10 is ±1.
To compute the Pontryagin class p1(ξ1,0), recall that the quaternionspace H is actually a complex space, and the quaternion disc bundleis a complex bundle. For complex bundles, there is an identity
1− p1 + p2 − · · · = (1− c1 + c2 − · · · )(1 + c1 + c2 + · · · ).
In particular, we have p1 = c21 − 2c2. On one hand side, the class c1 of
any vector bundle over 3-connected sphere S4 is trivial. On the otherhand, by definition the class c2 of a complex vector bundle of realdimension 4 equals the Euler class. Thus, p1(ξ1,0) = −2e(ξ1,0) = ±2.
Theorem 8.3. The first Pontryagin number of ξh,0 is ±2h.
Proof. The Pontryagin numbers are additive with respect to taking theconnected sum of fiber bundles. Therefore, for any positive h we have
p1(ξh,0)[S4] = p1(#hξ1,0)[S4] = ±2h.
On the other hand, if h is negative then the equality
p1(ξh,0#ξ−h+1,0)[S4] = p1(ξ1,0)[S4]

exotic spheres: discovery of exotic spheres s799
implies that the claim of the theorem holds both for positive and neg-ative h.
Our next step is to extend Theorem 8.3 to the case of more generalMilnor fibrations ξh,j. To this end, let us construct a new vector bundleξh,0 with the property that there is a fiberwise orientation reversing iso-morphisim ξh,0 → ξh,0 covering the identity map of the common basespace S4. To this end, let us fix an orientation reversing isomorphismR4, say the homomorphism r : (a, b, c, d) 7→ (−a, b, c, d). Recall thatthe vector bundle ξh,0 is obtained by suing two trivial vector bundlesD− ×R4 and D+ ×R4 over the upper and lower hemispheres D− andD+ by means of the clutching function fh,0 : S3 → SO(4). Each quater-nion A ∈ S3 determines two orthogonal planes P1 and P2 where P1 isspanned by the vectors in the quaternions a and bi+ cj+ dk. The trans-formation fh,0(A) rotates the planes P1 and P2 through the angles hθ
and −hθ respectively, where a = cos θ. Similarly, the vector bundle ξh,0
is obtained by means of the clutching function fh,0 = r fh,0 r−1. Nowthat the direction with coordinate a is reversed, the transformation fh,0
rotates the planes P1 and P2 through the angles −hθ. Consequently,the vector bundle ξh,0 is the same as the vector bundle ξ0,−h.
The vector bundle ξh,0 is said to be obtained from ξh,0 by changingthe fiber orientation. Note that the characteristic classes of ξh,0 may ormay not be different from those of ξh,0. For example, the Euler cochainassociates with a cell D in the base of the vector bundle the degree of amap ∂D → S3. When we change the orientation of the fiber, we changethe orientation of S3 and the sign of degrees of maps ∂D → S3. Thus,the Euler obstructing cochain e(ξh,0) is negative the cochain e(ξh,0). Onthe other hand, when we compute the Pontryagin classes of ξh,0, wefirst take the complexification of ξh,0. The orientation of fibers in ξh,0
and ξh,0 is the same as we changed orientation twice: in the directiona and ia. Therefore, pi(ξ0,−h) = pi(ξh,0).
Theorem 8.4. The first Pontryagin number of ξh,j is ±2(h− j). While theEuler number of ξh,j is h + j.
Proof. The Euler obstructing cochain changes to its negative, when theorientation of a vector bundle is changed. Hence, we deduce thatξ0,−1 = −ξ1,0. Therefore, the additivity of the Euler number with re-spect to taking fiberwise connected sums of vector bundles impliesthat the Euler number of ξh,j is h + j. The calculation of the first Pon-tryagin number is similar.

100 elements of surgery theory
7 Equivalently, we may use the fact thatsince the intersection form of N is uni-modular, we have v ∪ v = ±w.
8 Note that the restriction of the tangentbundle of N to S4 consists of two sum-mands: the tangent bundle of S4 and thenormal bundle of S4 in N. The latteris isomorphic to ξh,j. That is why theclass p1(N) restricts to p1(ξh,j⊕ TS4). Bythe Whitney formula, the restricted classequals
p1(ξh,j ⊕ TS4 ⊕ ε) = p1(ξh,j)
since
p1(TS4) = p1(TS4 ⊕ ε) = p1(ε5) = 0.
8.5 Exotic spheres of dimension 7
In view of Theorem 8.2, every manifold Σk = Mh,j with k = h − jand 1 = h + j is homeomorphic to a sphere as, in this case, the Eulernumber of the vector bundle ξh,j is 1. The sphere bundle Σk → S4
bounds a disc bundle Dk → S4. If Σk is diffeomorphic to the standardsphere, then the boundary of the total space Dk can be capped off witha disc to produce a closed manifold N of dimension 8. There is asimple CW-structure on the manifold N. The manifold N is obtainedby taking a 0-cell, attaching a 4-cell to the 0-cell, and then attaching an8-cell to the sphere N(4). In particular, its cohomology groups are freegenerated by classes u, v, w in degrees 0, 4 and 8 respectively, where wis an orienting cohomology class. Furthermore, we know that v ∪ v =
±w as the Euler number of ξh,j = ±1.7 We may change the orientingcohomology class of N so that v ∪ v = w. Then σ(N) = 1.
By dimensional reasoning, the first Pontryagin class p1(N) is a mul-tiple of v. If we restrict it to the sphere S4 = N (4) , then we obtainthe class p1(ξh, j ⊕ TS4) that is ±2k times a generator of H4(S4).8
Consequently, we have p1(N) = ±2kv, and p21(N) = 4kw.
Recall now that, by the Hirzebruch formula, we have σ = (7p2 −p2
1)[N]/45. In particular, the number 45σ + p21[N] = 45 + 4k2 should
be divisible by 7. However, it is not divisible by 7 whenever k2 − 1 isnot divisible by 7. On the other hand, for each odd number k there areintegers h and j such that h + j = 1 and k = h− j, and therefore thereis a homotopy sphere Σk = Mh,j. Thus, for example, the manifold Σ3
is homeomorphic, but not diffeomorphic to the standard sphere S7.
8.6 Further reading
Characteristic homological classes were initially introduced by Stiefeland Whitney. The axiomatic definition of Stiefel-Whitney as well asChern classes was proposed by Hirzebruch.
Example 7.4 was worked out by Milnor and Kervaire
All information that we used in the chapter (and, of course, much morethan that) on characteristic classes, Hirzebruch signature formula, aswell as orientable cobordism groups can be found in the book Char-acteristic classes by John Milnor and James Stasheff. The elementary,

exotic spheres: discovery of exotic spheres s7101
obstruction theoretic definition of characteristic classes, can be foundin the book Homotopical Topology by Anatoly Fomenko and DmitryFuchs. The reader may find in the same book proofs (which we omit-ted) of two important properties of characteristic cochains that charac-teristic cochains are cocylces, and that their cohomology classes do notdepend on various choices in the definition of the cochains.
An excellent geometric description of the map SU(2) → SO(3) canbe found in the preprint An elementary introduction to the Hopf fi-bration by David W. Lyons. The map Spin(4) → SO(3) is a universaldouble covering. It plays an important role especially in 4-dimensionaltopology. We recommend an interested reader an enjoyable book Lec-ture Notes on Seiberg-Witten Invariants by John Moore.
Of course, the main reference for this chapter is the original paper Onmanifolds homeomorphic to the 7-sphere by John Milnor.

9
Exotic spheres
An exotic sphere of dimension n is a smooth manifold that is home-omorphic but not diffeomorphic to the standard sphere Sn . We haveseen the original construction of exotic spheres by Milnor in dimen-sion 7. Today we will discuss a general theory of exotic spheres bothin dimension 7 and in higher dimensions.
9.1 The group of smooth structures on a sphere
To begin with let us observe that the set of diffeomorphism classes ofsmooth manifolds homeomorphic to a sphere of dimension n formsan abelian monoid with connected sum operation, i.e., if Σ1 and Σ2
are two oriented exotic spheres, then Σ1 + Σ2 is obtained by removinga small disc from each Σi and identifying the two obtained bound-ary spheres. Of course, taking the connected sum of two topologicalspheres results in a topological sphere, and therefore Σ1 + Σ2 is home-omorphic to a sphere. The monoidal operation is well-defined; for ex-ample, it does not depend on the choice of representatives of Σ1, Σ2,on the choice of an identifying diffeomorphism of boundary spheres,and on smoothings.
It may not be immediately clear that the monoid of smooth manifoldshomeomorphic to the sphere Sn is a group. However, Smale provedthat for n 6= 3, 4 this monoid is isomorphic to the group θn of h-cobordisms of homotopy spheres. We will assume today that n > 5,unless we explicitly state otherwise.
Definition 9.1 (The group θn). Two oriented closed manifolds M1 and

exotic spheres 103
1 The zero in the group θn is representedby the standard sphere. The inverse ofthe class of a manifold M is the classof −M; the complement to a small discin M × [0, 1] is a cobordism from M t(−M) to the standard sphere.
Figure 9.1: An almost framed bordism.
Figure 9.2: A framed cobordism in thedefinition of Pm for m = 2.
Figure 9.3: A framed cobordism in thedefinition of Pm for m = 1.
M2 are said to be h-cobordant if M1 t (−M2) bounds an oriented com-pact manifold W such that each of the manifolds M1 and M2 is adeformation retract of W . Here −M2 is the manifold M2 with the op-posite orientation. The set of h-cobordism classes of homotopy spheresforms an abelian group θn under the connected sum operation.1
The Smale h-cobordism theorem asserts that an h-cobordism W betweenclosed simply connected manifolds M1 and M2 of dimension dim M1 =
dim M2 ≥ 5 is trivial, i.e., the cobordism W is diffeomorphic to M1 × [0, 1].In particular, the manifolds M1 and M2 are diffeomorphic. Thus, twosmooth n-manifolds homeomorphic to a sphere are h-cobordant if andonly if they are diffeomorphic provided that n ≥ 5. In particular, themonoid of smooth n-manifolds homeomorphic to a sphere is isomor-phic to θn.
In this chapter we aim to study the groups θn. Our main tool is anobservation that the groups θn fits a so-called surgery exact sequence ofgroups; the other entries of the exact sequence are N∗ and P∗, whichwe define next.
Definition 9.2. A manifold M ⊂ Rm+k is almost framed if it is framed inthe complement to one point. Suppose that for i = 1, 2 two manifoldsMi are framed in the complement to xi and there is a cobordism W ⊂Rm+k × [0, 1] between M1 and M2. We say that W is an (almost framed)cobordism if it is framed in the complement to a curve α joining x1
with x2; the framing on W \ α is required to coincide over M1 \ x1
and M2 \ x2 with the almost framings of M1 and M2 respectively. Theset of cobordism classes of almost framed, path connected, non-emptymanifolds of dimension n is denoted by Nm.
We claim that the set Nm forms a group with respect to taking theconnected sum. Given two pointed manifolds (Mi, xi) with i = 1, 2,framed in the complement to xi, some care should be taken to formthe almost framed connected sum of M1 and M2. To begin with, weremove an open disc Di of dimension m from each manifold Mi so thatxi ∈ ∂Di. After that we form the connected sum M1]M2 by attachingto M1 \ D1 and M2 \ D2 a cylinder Sm−1 × [0, 1] in such a way thatthe a curve α = x × [0, 1] joins the points x1 and x2. Since thereis only one frame over the contractible manifold Sm−1 \ x, there is aunique frame over M1]M2 in the complement to α that is compatiblewith the original frames over M1 \D1 and M2 \D2. Since the segmentα is contractible to its midpoint x12, there is a well-defined framing ofM1]M2 in the complement to the point x12, which we declare to be thedistinguished point of the connected sum.

104 elements of surgery theory
Figure 9.4: The boundary of the man-ifold W = (M \ D) × [0, 1] consists ofthree smooth pieces: the upper andlower horizontal copies of M \D and thevertical copy of Sn−1 × [0, 1].
2 It follows that the manifold (−M) to-gether with its frame can be obtainedfrom the manifold M and its frame byplacing M to the half space x1 < 0 andthen transforming M and its framing bythe reflection along the hyperspace x1 =0.
The trivial element ofNm is represented by the pointed standard sphereSn with a unique frame of Sn \ pt.
Lemma 9.3. The set Nm forms a group with respect to taking the connectedsum. The inverse of the class of an almost framed manifold (M, x) is repre-sented by (−M, x).
Sketch of the proof. Let D denote a small open ball in M ⊂ Rm+k suchthat x ∈ ∂D. Without loss of generality we may assume that the man-ifold M \ D is placed in the half space x1 ≤ 0 in such a way that theboundary of M \ D is the standard sphere S in 0 ×Rm × 0k−1 andthe collar neighborhood of ∂(M \ D) is given by the trace of the trans-lation of the standard sphere S in the direction of the coordinate vector−e1. Then, the boundary of the manifold W = (M \D)× [0, 1] consistsof three smooth pieces
(M \ D)× 0, (M \ D)× 1, and Sn−1 × [0, 1],
and after smoothing the corners becomes diffomorphic to M#(−M).The frame over (M \D)×0 spreads by vertical translation to a frameover the manifold W. We remove an open disc D from the interior ofW, and place the manifold W \D to Rm+k × [0, 1] in such a way that itis a cobordism between M#(−M) and ∂D.
To complete the proof we choose an arbitrary curve α in W \ D from apoint in the boundary ∂D to the distinguished point of M](−M). Themanifold W \ D is a desired cobordism framed in the complement tothe curve α.2
The final player that we need to introduce is Pm.
Definition 9.4. The group Pm is the group of cobordism classes ofcompact framed manifolds M of dimension m bounded by homo-topy spheres S. Two such framed manifolds Mi bounding homotopyspheres Si for i = 1, 2 are called cobordant if there is a framed man-ifold W whose boundary consists of M1 ∪ N ∪ M2 where N is an h-cobordism between S1 and S2 and where the boundary of N is identi-fied with the corresponding boundaries of M1 and M2. The operationon Pm is given by taking the exterior connected sum that joins S1 withS2.
Note that under our dimensional assumption m > 5, the h-cobordismN between the homotopy spheres S1 and S2 of dimension m− 1 ≥ 5is trivial. Thus, by the h-cobordism theorem, two framed manifolds

exotic spheres 105
M1 and M2 represent the same element in Pm if M1 and M2 boundthe same homotopy sphere S and there is a framed cobordism W withboundary M1 ∪ (S× [0, 1]) ∪M2.
9.2 The surgery long exact sequence for spheres
We are now in position to write down the surgery exact sequence forspheres.
Theorem 9.5. There is a long exact sequence of groups
· · · −→ Nm+1p−→ Pm+1 b−→ θm
η−→ Nm −→ · · · .
Proof. To begin with let us define the homomorphisms. The homo-morphism b is defined by taking the boundary of a manifold. Next, inorder to construct the homomorphism η note that the complement to apoint in a topological sphere is homeomorphic to a disc, and thereforeevery homotopy sphere comes with a unique almost framing. Finally,the map p is defined by removing a small open disc containing thenon-framed point. More precisely, if M is a manifold framed in thecomplement to a point x, then p[M] is represented by the framed man-ifold M \ D bounded the sphere ∂D, where D is a small disc centeredat x.
If η(Σ) is in the trivial class, then, by definition, there is a cobordismW of Σ to the standard sphere S, a curve α in W and an appropriateframing over W \ α. The boundary component S can be capped offwith a disc D to produce a manifold W ∪ D which bounding Σ. Theframing over W \ α uniquely extends to a framing in the complementto α in W ∪D. Contracting α to the distinguished point on Σ and thenremoving a clollar neighborhood of Σ (together with the non-framedpoint point) in W, we get an element in Pm+1. Clearly η b = 0. Thus,the sequence is exact at θm.
If M is a compact framed manifold which represents an element in thekernel of b, then, by the h-cobordism theorem, the boundary of M isdiffeomorphic to the standard sphere. By capping the boundary of Moff with a disc D we obtain a manifold M∪D representing an elementin Nm+1. On the other hand, a manifold M ∈ Pm+1 representingan element in the image of p has boundary diffeomorphic to a sphere.Therefore, the class of M belongs to the kernel of b. Thus, the sequenceis exact at Pm+1.

106 elements of surgery theory
3 Note that framed surgery on M doesnot change the framed cobordism class[M] ∈ Pm.
4 To do: add corollaries about manifoldsbounding homotopy spheres in the rele-vant chapters.
Let M be a manifold representing an element inNm. It is framed in thecomplement to a point. Let D be a small open disc about that point.Suppose that [M] is in the kernel of p. Then M \ D is cobordant to thestandard disc Dm by means of a cobordism W. By the h-cobordismtheorem, assuming that m > 5, the boundary of W is diffeomorphic toSm−1× [0, 1]. We may cup it off with Dm × [0, 1] to obtain a cobordismW ∪ (Dm × [0, 1]) of the manifold M to a manifold homeomorphic toa sphere. Furthermore, the cobordism W is framed outside the curve0 × [0, 1] ⊂ Dm × [0, 1]. Thus the manifold M represents a class inthe image of η. Finally, if we start with an almost framed homotopysphere and cut out an open disc about the distinguished point with aframe, then we will be left with a standard sphere bounding a standarddisc (by the h-cobordism theorem, provided that m > 5). Thus, thesequence is exact at Nm.
9.3 Calculation of the group Pm
In the previous chapters we considered surgery on closed manifolds.In this section we will use the same framed surgery technique tosimplify framed compact manifolds with boundary homeomorphic tospheres, i.e., manifolds M representing an element in Pm. 3
Again, we proceed by induction. If the manifold M of dimension mis (q− 1)-connected, then for every element in πq M we may choose aWall representative S. By general position argument, below the middlerange q < m/2, the obstruction µ to the existence a framed surgeryalong S is trivial. Thus, we may always modify the manifold M so thatit is (bm
2 c − 1)-connected.
To study modifications of M near the middle range, we observe thatif M bounds a topological sphere Σ, we may attach to M the disc Dm
of dimension m by identifying the boundary of the disc with Σ. Theresulting manifold M is a closed topological manifold that is smoothand framed away from a disc (or, equivalently a point). For this reason,the discussion of surgeries of framed manifolds can be extended toframed manifolds M bounding a homotopy sphere. We define thesignature and the Kervaire invariant of M to be those of M. 4 Let usrecall the relevant theorems.
Theorem 9.6. Let M be a compact framed manifold of dimension m ≥ 5bounding a homotopy sphere Σ.

exotic spheres 107
5 Include a discussion of plumbing
• If m is odd, then M is cobordant to a framed contractible manifold.
• If m = 2q with q even, then M is cobordant to a framed contractiblemanifold if and only if σ(M) = 0.
• If m = 2q with q odd, then M is cobordant to a framed manifold if andonly if the Kervaire invariant of M is trivial.
Thus, we may compute the group Pm.
Theorem 9.7. If m is odd, then Pm = 0. Suppose that m = 2q. If q is even,then Pm = Z. If q is odd, then Pm = Z2.
Proof. Suppose that m is odd. Then, by performing framed surgeryin the interior or M, we may assume that the manifold M bounding ahomotopy sphere Σ is contractible. Remove a standard disc Dm fromthe interior of M to obtain an h-cobordism M \ Dm between Σ andSm−1. By the h-cobordism theorem, the homotopy sphere Σ is actuallythe standard sphere Sm−1, while the manifold M \ Dm is Sm−1 × [0, 1].Therefore, M ≈ Dm, which implies Pm = 0.
Suppose now that m = 2q, and q is even. Consider the map σ : Pm → Z
defined by associating with M its signature. Since the signature of amanifold is an invariant of cobordisms, the map σ is well-defined, i.e.,the value of the homomorphism σ does not depend on the choice ofthe representative of a class in Pm. Furthermore, since
σ(M1#M2) = σ(M1) + σ(M2),
the map σ is actually a homomorphism with respect to operations inPm and Z. We claim that the homomorphism σ is injective. Indeed, iftwo manifolds M1 and M2 bounding homotopy spheres Σ1 and Σ2 areof the same signature, then the boundary connected sum M1](−M2)
is a compact framed manifold M of signature σ(M) = 0 again bound-ing a homotopy sphere Σ = Σ1#(−Σ2). By Theorem 9.6, the framedmanifold M is cobordant to a contractible manifold, while Σ is diffeo-morphic to a standard sphere. Therefore M represents a trivial elementin Pm. Thus, the homomorphism σ is injective.
At this moment, since Pm is isomorphic to a subgroup of Z, we mayconclude that either Pm = 0 or Pm = Z. On the other hand, themanifold M constructed by plumbing corresponding to the matrix E8
bounds a homotopy sphere and has signature 8. Therefore, when m isdivisible by 4, the group Pm is isomorphic to Z. 5

108 elements of surgery theory
6 Here is the original argument of Mil-nor, see Differential manifolds whichare homotopy spheres, Lemma 3.2. Wewould like to show that all values
x ∪ x[M] = Sqqx[M] = νq ∪ x[M]
are zero mod 2. Here νk is the k-th Wuclass defined by the requirement that
νk ∪ x[M] = Sqm−k(x)[M]
for all x. If x∪ x[M] ≡ 1, then the class νqis non-trivial. We claim that this impliesthat some Stiefel-Whitney class is non-trivial. Indeed, for the total Wu classν = 1 + ν1 + · · · we have w = Sq(ν),i.e., wk = ∑i≥0 Sqi(νk−1). Let νk be thenon-trivial Wu class of the least degree.Then wk(M) = νk 6= 0 for some k ≤ qfor the compact framed manifold withboundary homeomorphic to a sphere.
Remark 9.8. We will show later that the intersection form over Z of themanifold M is unimodular and even. In particular, the signature of Mis divisible by 8. Therefore, the homomorphism σ : Pm → Z is givenby multiplication by 8. 6
Suppose now that m = 2q and q is odd. Now we consider the homo-morphism κ : Pm → Z2 defined by associating with a manifold M itsKervaire invariant κ(M). Again, as in the case with the signature, theKervaire invariant is a cobordism invariant and
κ(M1#M2) = κ(M1) + κ(M2).
Therefore, the map κ is indeed a well-defined homomorphism. ByTheorem 9.6, the homomorphism κ is injective. On the other hand,consider the manifold K(2n) constructed by plumbing correspondingto the unimodular matrix [
0 1−1 0
].
Since the intersection form of K(2n) is unimodular, it bounds a homo-topy sphere. On the other hand, the Kervaire invariant of the manifoldK(2n) is 1. Thus, the homomorphism κ is an isomorphism.
Remark 9.9. We may now reinterpret the part θm → Nmp→ Pm+1 of
the surgery exact sequence. Namely, we may say that p is assocciatingwith an almost framed manifold M the algebraic invariant of the in-tersection form of M. It is a complete obstruction to the existence of aframed cobordism of M to a homotopy sphere.
9.4 Calculation of the group Nm.
Recall that in order to calculate the group θm of exotic smooth struc-tures on an m-dimensional sphere, we introduced a long exact se-quence involving two other groups: the cobordism group Pm of com-pact framed manifolds bounding a homotopy sphere, and the cobor-dism group Nm of almost framed manifolds. We have already com-puted the group Pm. In this section, we will compute the group Nm.
Theorem 9.10. There is a long exact sequence of groups
· · · −→ πmSOJ−→ πS
mη−→ Nm
γ−→ πm−1SOJ−→ · · ·
where the homomorphism η associates with a framed manifold, an almostframed manifold by forgetting the frame at one point.

exotic spheres 109
Proof. To begin with, let us define the homomorphism γ. Let M be amanifold framed in the complement to a point x. Let D be a closeddisc in M centered at the point x. Then over the boundary of D thereare two frames: the unique frame over the disc D, and the frame thatcomes from the almost framing of M. We may assume that the framesover M and D are orthonormal. Therefore, the pointwise rotation ofthe first frame to the second over the boundary Sm−1 = ∂D is a con-tinuous map Sm−1 → SO which represents an element γ([M]) of thehomotopy group πm−1SO. Clearly, the so-defined map γ does not de-pend on the choice of the representative of the class of M and it is, infact, a homomorphism.
The class [M] is in the kernel of γ if and only if the framing over M \Dextends to a smooth framing over M. Thus, the sequence is exact atNm. The composition J γ associates with an element [M] the classof the boundary ∂M with the frame obtained by restricting the framefrom M. However, the manifold M itself provides a framed cobordismof ∂M to an empty manifold. Therefore J γ = 0. Conversely, if aframing on a sphere Sm−1 is chosen so that the framed sphere Sm−1
is null-cobordant, then the null-cobordism W represents an element ofNm. Thus, the sequence is exact at πm−1SO.
Finally, suppose that a framed manifold M, is cobordant to the stan-dard sphere Sn−1 by a cobordism W framed away a curve α whichconnects a point in M with a point in Sn−1. Since the framing of W \ α
extends over M, we may shrink α to a point in Sn−1, and then removeSn−1 from W together with its open collar neighborhood U. The ob-tained framed manifold W \U is a cobordism between M and a framedsphere Sn−1, which means that [M] belongs to the image of J. On theother hand, if [M] belongs to the image of J, then its complement to apoint is a disc with a unique framing. Therefore, [M] also belongs tothe kernel of η. Thus, the sequence is exact at Nm.
We may thus express the group Nm in terms of the J-homomorphism:
0 −→ Coker Jm −→ Nm −→ Ker Jm−1 −→ 0,
where Ker Jm−1 is isomorphic to Z if m is divisible by 4, and it is zerootherwise.

110 elements of surgery theory
7 The formula for the signature underconsideration is proved in Example 9.16.
8 For an explicit computation, see Exam-ple 7.4, and in particular, Theorem 7.11.
9.5 Calculation of homomorphisms in the surgery exact se-quence
Recall that we have calculated that in the surgery long exact sequence
· · · −→ Nm+1p−→ Pm+1 b−→ θm
η−→ Nm −→ · · · .
the group Pm is isomorphic to Z and Z2 when m respectively is of theform 4q and 4q + 2, and it is trivial otherwise. To begin with let usconsider the homomorphism b.
We have seen that when m = 4q, the isomoprhism Pm → Z is es-tablished by associating with a manifold M the number σ(M)/8. Inparticular, there is a compact manifold with boundary with signature8. On the other hand, suppose that the manifold M represents an el-ement in the kernel of b. In other words, suppose that the framedmanifold M bounds the standard sphere. Then we may cap off theboundary to obtain an almost framed manifold M. In this case, therestriction on signature of M (or, equivalently, on the signature of analmost framed manifold M) is fairly strict.
Theorem 9.11. The set of signatures of almost framed closed manifolds ofdimension m = 4q > 4 forms a subgroup tmZ of Z generated by the integer
tq = aq22q+1(22q−1 − 1)(numerator ofBq
4q),
where aq = 2 if q is odd and 1 if q is even.
Proof. Let M be a manifold of dimension m = 4q > 4 framed in thecomplement to a point x. Then the tangent bundle of M \ x is trivial,and, in particular, all Pontryagin classes of M restricted to M \ x aretrivial. Thus, the only possibly non-trivial Pontryagin class of M ispq M. In view of the Hirzebruch signature formula, the signature of Mis a multiple of pq(M). In fact, according to the Hirzebruch formula,which we will discuss in greater detail in section 9.6,7
σ(M) =22q(22q−1 − 1)Bq
(2q)!· pq[M],
where pq[M] is the q-th Pontryagin number of the manifold M. The co-homology class pq(M) can be computed directly from the definition ofthe Pontryagin classes as obstructions to constructing multiple sectionsof a vector bundle.8 It follows that pq M = ±aq(2q− 1)!γ([M]), whereγ is the homomorphism Nm → πm−1SO ≈ Z in Theorem 9.10. The

exotic spheres 111
9 To summarise,
σ(M) =22q(22q−1 − 1)Bq
(2q)!· pq[M]
=22q(22q−1 − 1)Bq
(2q)!· (±aq(2q− 1)!γ([M]))
= 22q+1(22q−1 − 1)Bq
4q· (±aqγ([M]))
= ±aq22q+1(22q−1 − 1)(numeratorBq
4q).
10 It is known that πs7 = Z240. On
the other hand, the image of the J-homomorphism in degree 7 is a cyclicgroup of order the denominator of Bq/4qfor q = 2, i.e., the order of the image isalso 240. Therefore, from the exact se-quence
π7SO '−→ πs7 → N7 → π6SO = 0.
we deduce thatN7 is a trivial group, andθ7 = bP8.
values of γ([M]) coincide with the values of the elements in Ker J ⊂ Z.Thus, the values of γ([M]) are the multiples of the order of the imageof the J-homomorphism, which is the denominator of Bq/4q.9
Now we are in position to calculate the homomorphism b. If m =
4q + 2, then the image of Pm = Z2 is either trivial or Z2, while if m isodd, then the group Pm is trivial.
Theorem 9.12. If m = 4q > 4, then the image of the group Pm = Z inθm−1 is a cyclic group of order tq/8.
Proof. In view of the exact sequence
· · · −→ Nmp−→ Pm b−→ θm−1 −→ · · ·
the image of the homomorphism b is Pm/Im p. The signature homo-morphism identifies Pm with 8Z ⊂ Z and Im p with tqZ. Therefore,the order of the image of b is tq/8.
Theorem 9.12 produces a number of exotic smooth structures on spheres.For example, suppose that m = 4q with q = 2; the lowest value of qallowed by Theorem 9.12. Then
t2/8 = 1 ∗ 25(23 − 1) ∗ 1/8 = 28.
In particular, there are at least 28 smooth manifolds of dimension 7homeomorphic to a sphere. In dimension 8 there are no other exoticspheres since the J-homomorphism π7(SO)→ πs
7 is surjective.10
9.6 Hirzebruch genera and computation of the L-genus
9.6.1 Multiplicative series
A genus is a ring homomorphism ϕ : Ω⊗Q → Q with ϕ(1) = 1. Weaim to classify all genera of smooth manifolds.
Example 9.13. We have seen the Hirzebruch L-genus. It is the ringhomomorphism that associates with each generator CP2n in Ω ⊗ Q
the value 1. Another important genus is the A-genus. It is related tothe index of the Dirac operator. The A-genus is characterized by theproperties that it is trivial on all quaternionic projective spaces HPk,while the genus of CP2 is −1/8.

112 elements of surgery theory
11 More explicitly, the condition thatϕ(M) = ϕ(M′)ϕ(M′′) is equivalent to
K(p)[M] = K(p)[M′] · K(p)[M′′].
In this expression the right hand side is
K((π′)∗p) ∪ K((π′′)∗p)[M′ ×M′′],
or, equivalently, K(p′)K(p′′)[M].
12 Thus, for example,
p1 = x21 + · · · x2
n,
p2 = x21x2
2 + · · ·+ x2n−1x2
n.
13 Let us recall our convention that fora series p = 1 + p1 + · · · , the expres-sion K(p) means K(p1, p2, ...). In par-ticular, the expression K(1 + x2
1) meansK(p1, 0, 0, ...) for p1 = x2
1. The geometricinterpretation of the decomposition 9.2is known as the Splitting Principle.
To begin with, since the only invariants of rational cobordism classesare Pontryagin numbers, for any genus ϕ, there are homogenious poly-nomials Kn = Kn(p1, p2, ..., pn) of degree 4n such that for every man-ifold M of dimension 4n its genus ϕ(M) is the Pontryagin numberKn[M]. Thus, a genus is completely determined by a formal seriesK = 1 + K1 + K2 + · · · in Pontryagin classes.
To determine which formal series K are associated with a genus, letus reformulate the multiplicative property of ϕ in terms of K. Let Mbe the product M′ ×M′′ of two manifolds with projections π′ and π′′
onto the two factors. Then the total rational Pontryagin class p(M)
can be expressed in terms of rational Pontryagin classes of M′ and M′′
by the formula p = p′p′′, where p′ and p′′ are pullbacks of the totalPontryagin classes of M′ and M′′ with respect to the projections π′
and π′′. Thus, the multiplicativity of the genus ϕ can be expressed interms of K as the requirement that11
K(p) = K(p′)K(p′′), (9.1)
where we use a notation K(p) for K(p1, p2, ...). We note that the equal-ity 9.1 should be satisfied for any formal series p, p′ and p′ with p =
p′p′′. For example, we may introduce formal variables x1, ..., xn andput12
p = 1 + p1 + p2 + · · ·+ pn = (1 + x21)(1 + x2
2) · · · (1 + x2n). (9.2)
Then13
K(p) = K(1 + x21)K(1 + x2
2) · · ·K(1 + x2n).
In other words, the multiplicative series K is completely determined bythe series Q(x) = K(1 + x2) of one variable. In fact, there is a bijectivecorrespondence between multiplicative series K and series Q(x) = 1+a2x2 + a4x4 + · · · in which only coefficients with even indices may benon-zero. Indeed, under the equality 9.2, the polynomials p1, ..., pn
form a basis in the space of symmetric polynomials in x21, ..., x2
n. Inparticular, for any decomposition I = (i1, ..., ir) of the number n, thereis a polynomial sI such that
sI(p) : = sI(p1, ..., pn) = ∑ x2i11 · · · x
2irn .
The series Q(x) corresponds to the multiplicative series with termsKn(p) = ∑ aIsI(p) where aI = ai1 · · · air .
To summarize, the genera, i.e., the ring homomorphisms Ω⊗Q → Q
are in bijective correspondence with the series Q(x) in even powers ofx with the free term 1.

exotic spheres 113
14 We recall that
p1 = x21 + · · · x2
n,
p2 = x21x2
2 + · · ·+ x2n−1x2
n.
15 In practice, to find the values of thegenus ϕ of a series Q(x) on the cobor-dism classes of manifolds CP2n, letf (x) = 1/Q(x), and let g(y) be the for-mal inverse of f , i.e., g( f (x)) = 1. Then
g′(y) = 1+ ϕ(CP2)y2 + ϕ(CP4)y4 + · · · .
For example, for the L-genus, the func-tion f (x) is th(x) and f ′(x) = 1− f (x)2.Hence,
g′(y) = 1/(1− y2) = 1 + y2 + y4 + · · · ,
i.e., indeed, the L-genus associates witheach CP2n the value 1. We will not usethis method in what follows, and leaveits validity without a proof.
16 Let us spell out the definition ofsn(a1, ..., a2n). Since the polynomialsp1, ..., pn form a basis in the spaceof symmetric polynomials in x2
1, ..., x2n,
there is a unique polynomial sn such that
sn(p) = x2n1 ⊕ · · · ⊕ x2n
n .
For example, s1(p) = p1, s2(p) = p21 −
2p2, and s3(p) = p31− 3p1 p2 + 3p3. Thus,
s1(a2, ..., a2n) = a2,
s2(a2, ..., a2n) = a22 − 2a4,
and
s3(a2, ..., a2n) = a32 − 3a2a4 + 3a6,
where ai is the i-th coefficient in the se-ries Q(x).
Example 9.14. The two genera that we discussed in Example 9.13, theL-genus and the A-genus, correspond to the series Q(x) = x
th(x) and
Q(x) = x/2sh(x/2) respectively. Let us compute explicitly the first two
Hirzebruch polynomials L1 and L2 in the series L(p) = K(p). As, ithas been mentioned, the series Q(x) corresponding to the L-genus is
xthx
= 1 +13
x2 − 145
x4 + · · ·+ (−1)j−1 22jBj
(2j)!x2j + · · · .
Therefore, the series L(p) = Q(x1) · · ·Q(xn) starts with the terms14(1 +
x21
3−
x41
45
)· · ·(
1 +x2
n3− x4
n45
)= 1 +
p1
3+
7p2 − p21
45,
and, in particular, the first terms in the series L are L1(p) = p1/3 andL2(p) = 7p2 − p2
1/45. 15
9.6.2 Genera of manifolds M4n with trivial p1, ..., pn−1.
In the rest of the section we will calculate a given genus ϕ of a mani-fold M4n with trivial Pontryagin classes p1, · · · , pn−1. We will use thesymbol ′ ≡′ to identify series in the quotient by the ideal of series gen-erated by (x4n+2), in other words the symbol ′ ≡′ suggests that in theseries we ignore terms of order ≥ 4n + 1.
Theorem 9.15. We have K(p) = sn(a2, ..., a2n)pn when the Pontryaginclasses p1, ..., pn−1 are trivial.16
Proof. Up to higher order terms, we have
Q(x) ≡ 1 + a2x2 + · · ·+ a2nx2n =n
∏i=1
(1 + bix2),
and therefore, again, up to higher order terms, K(p) = ∏ Q(xj) is
∏j
∏i(1 + bix2
j ) = ∏i
∏j(1 + bix2
j ) = ∏j(1 + bi p1 + · · ·+ bn
i pn).
When the Pontryagin classes p1, · · · , pn−1 are trivial, we deduce
K(p) ≡ (bn1 + · · ·+ bn
n)pn = sn(a2, a4, ..., a2n)pn,
which is precisely the statement of the theorem.
Example 9.16. Let us calculate the value sn(a) for the L-genus. We willneed the so-called Cauchy formula:
xf ′(x)f (x)
=∞
∑j=0
(−1)j2sjx2j.

114 elements of surgery theory
17 Let Qm(x) = 1+ a2x2 + · · ·+ a2nx2n bethe (2n)-th approximation of Q(x). Then
fm(x) =x
Qm(x)=
x(1 + b1x2) · · · (1 + bnx2)
.
The expression x f ′m/ fm = x(ln fm)′ is
x(
1x− 2b1x
1 + b1x2 − · · · −2bmx
1 + bmx2
)=
1 + ∑(−1)j2sjx2j.
This expression does not depend on m.
18 Indeed, since f (x) = th(x), we have
xf ′(x)f (x)
= xch 2x− sh2x
ch 2x
/shxch x
=2x
sh2x.
19 Its existence is proved for example inScorpan, page170.
where f (x) = x/Q(x). 17 The expression on the left hand sideas 2x/sh(2x).18 In its turn, the latter can be expressed in terms ofBernoulli numbers by
2xsh2x
= 2x
thx− 2x
th2x= 1− (22 − 2)
B1
2!(2x)2 + (24 − 2)
B2
4!(2x)4 − · · · .
In other words, sj = 22j(22j−1 − 1)Bj/(2j)!, and K(p) = sn pn. We mayreinterpret the result of this calculation by saying that for an orientedclosed manifold M of dimension 4n with trivial Pontryagin classesp1, ..., pn−1, the signature is
σ(M) = K(p)[M] = 22j(22j−1 − 1)Bj
(2j)!pn[M].
We used this formula for the signature in the proof of Theorem 9.11.
9.7 Example: The third stable homotopy group πs3
To begin with let us show that the J-homomorphism π3SO → πs3 is
surjective. To this end, let M be a framed manifold of dimension 3in R3+k representing a class in πs
3. Every orientable manifold M ofdimension 3 bounds a compact orientable manifold W of dimension4. We may assume that W is simply connected by applying 1-surgeryif necessary. Let F be an orientable characteristic surface embedded inW.19 By taking the connected sum of W with CP2#(−CP2) and of Fwith the characteristic sphere in CP2#(−CP2) we may create a trans-verse sphere, and therefore we may reduce F to a sphere. By takingconnected sums of (W, F) with (±CP2, CP1) we may assume that thenormal Euler number of F is 1. Thus, the boundary of a neighborhoodU of F is a sphere. Consequently, the manifold W \ U is a framedcobordims of M to a framed sphere. Thus the J-homomorphism issurjective.
Since π3SO = Z, the image of the J-homomorphism is a cyclic group.Let j3 denote the order πS
3 ; it is also the order of the image of the J-homomorphism. We have seen that for an orientable closed 4-manifoldM with w2M = 0, we have p1[M] = 2[ fT⊥M], where [ fT⊥M] belongs tothe kernel of the J-homomorphism, i.e., the number [ fT⊥M] is divisibleby j3. Let M be a closed even 4-manifold with p1[M] = 48, e.g., wemay choose M to be the manifold K3. Then p1[M]/2 = 24 is divisibleby j3. In particular, we have that j3 ≤ 24.

exotic spheres 115
9.8 Further reading

Figure 10.1: A cobordism W, and a pre-sentation of the manifold W as a unionof W0 × [0, ε] and handles.
1 For example, the handle H1 is attachedbefore any other handle to the upperboundary W0 × ε of the collar neigh-borhood of W0, while the handle H2is attached after H1 along the upperboundary of the cobordism W0 × [0, ε] ∪H1, not necessarily along W0 × ε. Theattaching sphere of the k-th handle Hkmay touch any previously attached han-dle.
10
The h-cobordism theorem
In this chapter we will discuss various techniques of simplifying cobor-disms of (non-framed) manifolds of dimension m in the Euclideanspace Rm+k with k m.
We have seen that a cobordism W in Rm+k ∈ [0, 1] between manifoldsW0 and W1 can be represented as a composition of spherical cobor-disms. In particular, the cobordism manifold W is diffeomorphic tothe union
W0 × [0, ε] ∪ H1 ∪ · · · ∪ Hn
with smoothened corners, where Hi is the i-th handle, see Figure 10.1.Three comments are in order.
• A union presentation of a cobordism W determines the cobordismW up to a diffeomorphism. For this reason we will often describethe cobordism W by its union presentation.
• To simplify the discussion, we will use manifolds with corners inour constructions whenever it is convenient. We already know thatcorners can always be smoothened.
• The handles in a presentation of a cobordism are attached consecu-tively in the order of their appearance in the presentation.1
In general, a presentation of a cobordism W is not unique. For ex-ample, the cobordism W in Figure 10.1 with two handles H and H′
has at least two obvious different presentations in which the handlesH and H′ are attached in different orders. According to the HandleRearrangement Lemma 10.1, handles in a presentation of a cobordismcan always be rearranged in such a way that the handles are attached

the h-cobordism theorem 117
Figure 10.2: Since S′a is disjoint from Sb,there is a radial isotopy which brings S′ato the complement to hj.
consecutively in ascending order of their indices. By the Handle Cre-ation Lemma 10.2, whenever it is desired, two consecutive new han-dles H and H′ of indices i and i + 1 can be added to a presentation of acobordism. Informally, the handle H creates a hole, while H′ caps thehole off. Conversely, the Handle Cancellation Lemma 10.3 asserts thatwhenever in a presentation there are two consecutive handles H andH′ of indices i and i + 1 such that the attaching sphere of H′ intersectsthe belt sphere of H transversally at a unique point, the handles canbe cancelled. The Handle Slide Lemma 10.4 offers a modification ofhandles H and H′ of the same index i < m− 1. It asserts, for example,that if the handles H and H′ are attached to a simply connected man-ifold along attaching spheres in homotopy classes [Sa] and [Sb], thenthe handle H can be replaced by a handle attached along an attachingsphere in the homotopy class [Sa] + [Sb]. Finally, the Handle TradeLemma 10.5 suggests a procedure of trading a handle of index i for ahandle of index i + 2 provided that the index i of the handle is belowthe middle range, i ≤ m/2− 1. A handle trading is possible only if acertain relative homotopy group is trivial.
If the described techniques of handle manipulation seems poorly mo-tivated to a reader, the reader may want to begin with the proof of theh-cobordism thereom and refer to sections with a detailed descriptionof techniques whenever is necessary.
10.1 Handle manipulation techniques
10.1.1 Handle rearrangement
In some occasions two consecutively attached handles can be rear-ranged. For this modification of the cobordism W, we may assume thatW has only two handles, H and H′, of indices i and i′ respectively. Thehandle H = Di × Dj is attached along the thickening Si−1 × Dj of theattaching sphere Sa. The result of the corresponding spherical surgeryon W0 is a manifold W1/2. It contains the thickening Di × Sj−1 of thebelt sphere Sb. Note that the belt sphere is of dimension j− 1 = m− i.The handle H′ = Di′ × Dj′ is attached to the intermediate manifoldW1/2 along an attaching sphere S′a of dimension i′ − 1.
Lemma 10.1. Suppose that i′ ≤ i, then the cobordism W is diffeomorphic toa cobordism W0 × [0, ε] ∪ H′ ∪ H.

118 elements of surgery theory
Figure 10.3: There is a radial isotopy inRi , along the vector field v(x) = x. Itpreserves the origin 0, and in finite timestretches a small neighborhood of 0 overthe unit disc Di . More generally, sup-pose a spherical surgery is performedon a manifold W0 producing a manifoldW1/2, i.e., the thickening hi of an attach-ing sphere is replaced with the thicken-ing of hj = Di × Sj−1 of a belt sphereSb. There is a radial vector field over hjassigning to each point (x, s) the radialvector v(x) = (x, 0). The radial vectorfield v can be extended to a vector fieldover W1/2 with support in a neighbor-hood of hj. In finite time the radial iso-topy along v stretches a small (dark grey)neighborhood U of Sb over all hj. In par-ticular, it caries the complement hj \ Uoutside of hj.
2 We can use the radial isotopy to replacethe thickening hi′ of the attaching sphereS′a with a thickening of a new attachingsphere S′′a disjoint from hj. The sphericalcobordism along S′a is diffeomorphic tothe spherical cobordism along S′′a .
Figure 10.4: The handles Hi and Hi+1.
Proof. Without loss of generality we may assume that the attachingsphere S′a of the handle H′ is transverse to the belt sphere Sb of thehandle H in W1/2. Since the dimension of S′a is i′ − 1, while the di-mension of Sb is m − i, we conclude that S′a is disjoint from Sb ifi′ − 1 + m − i < m. The latter holds whenever i′ ≤ i. When the at-taching sphere S′a is disjoint from the belt sphere Sb, we may assumethat the thickening of S′a is disjoint from the thickening of Sb in W1/2,see Figure 10.3.2 and therefore we may first attach to W0 × [0, ε] thehandle H′, and then the handle H.
10.1.2 Handle creation
Let W be a trivial cobordism W0 × [0, 1]. We will show that it has astructure of a cobordism with two handles Hi of index i and Hi+1 ofindex i + 1. In other words, we may create two handles of consecutiveindicies on a cobordism without changing the diffeomorphism type ofthe cobordism.
Recall that the i-handle Hi = Di × Dj is bounded by hi and hj =
Di × Sj−1, see Figure 10.4. Furthermore, the part hj itself splits as
the union of h+j = Di × Sj−1+ and h−j = Di × Sj−1
− , where Sj−1+ and
Sj−1− are the upper and lower hemispheres. Similarly, the boundary of
the i + 1-handle Hi+1 = Di+1 × Dj−1 is a union of hi+1 = Si × Dj−1
and hj−1 = Di+1 × Sj−2. The part hi+1 itself can be represented as aunion of h+i+1 = Si
+ × Dj−1 and h−i+1 = Si− × Dj−1. Since Si
+ is the
upper hemisphere of Si diffeomorphic to Di, and Sj−1+ is the upper
hemisphere diffeomorphic to Dj−1, we may identify h+i+1 with h+j toform a disc Hi ∪ Hi+1, see Figure 10.5.
Attaching the disc Hi ∪ Hi+1 along the disc hi ∪ h−i+1 to W0 × [0, 1]results in a cobordism W × [0, 1] ∪ Hi ∪ Hi+1. On the other hand, at-taching the disc Hi ∪ Hi+1 along the disc does not change the diffeo-morphism type of W0 × [0, 1]. Thus, we proved the following lemma.
Lemma 10.2. Let W be a trivial cobordism W0 × [0, 1]. Let Si− denote an
embedded disc in W0 × 1. Then there is a handle Hi with attaching sphere∂Si−, and a handle Hi+1 attached to W0 × [0, 1]∪ Hi such that W0 × [0, 1]∪
Hi ∪ Hi+1 is a trivial cobordism.

the h-cobordism theorem 119
Figure 10.5: The disc Hi ∪ Hi+1.
3 Recall that the boundary of Hi con-sists of the union hi ∪ hj. The spheri-cal surgery on W0 corresponding to Hiconsists of replacing hi = Si−1 ×Dj withhj = Di × Sj−1.
10.1.3 Handle cancellation
Handle cancellation is a procedure inverse to the handle creation. Webegin with a cobordism W = W0 × [0, ε] ∪ Hi ∪ Hi+1 where Hi = Di ×Dj is a handle of index i and Hj is a handle of index j, and determinewhen the two handles can be cancelled. We note that the cobordismW is a composition of a spherical cobordism from W0 to W1/2 of indexi, and a spherical cobordism from W1/2 to W1 of index i + 1.
Lemma 10.3. Suppose that the attaching sphere S′a of Hi+1 intersects thebelt sphere Sb of the handle Hi transversally in W1/2 at a unique point. Thenthe cobordism W is trivial.
Proof. Since S′a intersects Sb transversally, we may assume that neareach intersection point the sphere S′a is parallel to the core disc of Hi,i.e., near the intersection point p in S′a ∩ Sb the sphere agrees withDi × p ⊂ Hi. Let v denote the radial vector field on hj = Di ×Sj−1.3 It is a smooth vector field which we may extend over W1/2
with support in a neighborhood of hj. An isotopy along the vectorfield v stretches a small neighborhood of the belt sphere 0× Sj−1 overthe whole solid torus hj. In particular, it brings S′a to an attachingsphere which intersects hj along discs Di × p parallel to the core.Therefore we may assume that the handle Hi+1 is attached to W1/2
along hi+1 = h+i+1 ∪ h−i+1 where h+i+1 coincides with h+j , while h−i+1is a thickening of a disc in the closure of W1/2 \ hj. Therefore, theattaching of the handles Hi and Hi+1 is the same as in the handlecreation procedure. Thus, the cobordism W is trivial.
10.1.4 Handle slides
Suppose now that the cobordism W of a manifold W0 consists ofattaching two handles H and H′ of index i < m − 1, where m isthe dimension of W0. In this case it is possible to change the ho-motopy classes of attaching spheres without changing the diffeomor-phism type of the cobordism W.
Suppose that H is attached along an attaching sphere Sa, while H′
is attached along S′a. By the Handle Rearrangement Lemma we mayassume that both handles H and H′ are attached at the same time toW0 × ε. The sphere S′a has a neighborhood hi which can be identifiedwith S′a × Dj. Pick a point q on the boundary of Dj. Then S′a × q

120 elements of surgery theory
is a parallel displacement of S′a which we will denote by S′′a . Let γ
be an embedded path in W0 × ε parametrized by [0, 1] from a pointγ(0) on the sphere Sa to a point γ(1) on a parallel displacement S′′aof the sphere S′a. Finally, let S′′′a denote the connected sum of Sa withS′′a along the path γ. More precisely, let [0, 1] × Di−1 denote an i-dimensional tube about the curve γ = [0, 1]× 0 such that the disc0 × Di−1 is a neighborhood of γ(0) in Sa, and the disc 1 × Di−1
is a neighborhood of γ(1) = s × q in S′′a , and suppose that thereis no other intersection points between the tube [0, 1]× Di−1 and thetwo attaching spheres. The connected sum S′′′a is formed by removing0 × Si−1 from Sa, removing 1 × Si−1 from S′′a , and attaching theremaining part [0, 1]× ∂Di−1 of the boundary of the tube.
Lemma 10.4. Let W be a cobordism W0× [0, ε]∪H∪H′ of a path connectedmanifold W0. Then W is diffeomorphic to a cobordism W0× [0, ε]∪H′ ∪H′′′,where H′′′ is a handle of index i attached along S′′′a .
Proof. Let W1/2 be the manifold obtained from W0 by spherical surgerycorresponding to H′. In other words, the manifold W1/2 is obtainedfrom W0 by replacing the solid torus h′i with the solid torus h′j = Di ×Sj−1. We note that the union of the tube [0, 1]× Di−1 along γ togetherwith the disc Di×q is a disc B in W1/2. We may push the arc Sa ∩ ∂Bthrough the disc B to the arc ∂B \ Sa. This isotopy brings Sa to thesphere S′′′a . Therefore, attaching the handle H along Sa is equivalent toattaching a handle H′′′ along S′′′a .
Suppose now that W0 is simply connected. Then elements in πi−1W0
are free homotopy classes of maps Si−1 → W0, and [S′′′a ] = [Sa]± [S′′a ]in πi−1W0, where the sign depends on whether the connected sum ofSa and S′′a along γ is orientation preserving or not. If i < m− 1, thenwe may perform the connected sum along γ so that the connectedsum sphere S′′′a is in the class [Sa] + [S′′a ], and we may also perform theconnected sum so that the class [S′′′a ] is [Sa]− [S′′a ].
10.1.5 Handle trading
We continue to study a cobordism W of a manifold W0 of dimensionm. It turns out that if the relative homotopy group πi(W, W0) is trivial,and i is below the middle range (more precisely, i ≤ m/2− 1), thenevery handle Hi of index i can be traded for a handle of index i + 2.

the h-cobordism theorem 121
4 Note that the parts Bi+1 ∩ H′i andBi+1 ∩ Hi+1 can be pushed radially to h′jand hj−1, while the rest of Bi+1, which isin W0 × [0, ε] can be pushed upward toW0 × ε.
Lemma 10.5. Let W = W0 × [0, ε] ∪ αH′i ∪ Hi ∪ βHi+1 be a cobordismof a manifold W0 of dimension m which consists of attaching α + 1 handlesof index i > 0, and β handles of index i + 1. Suppose that m ≥ 2i + 2,and πi(W, W0) = 0. Then W is diffeomorphic to a cobordism of the formW0 × [0, ε] ∪ αH′i ∪ βHi+1 ∪ Hi+2.
Proof. The core Di × pt of the handle Hi represents a trivial ele-ment in the trivial group πi(W, W0). Hence there is a disc Bi+1 in Wbounded by ∂Bi+1 = Si
+ ∪ Si− where Si
+ is the core Di × pt of thehandle Hi, while Si
− is a disc in W0 × ε. By slightly perturbing Bi+1
we may assume that it is an embedded disc in the manifold W of di-mension m + 1 ≥ 2i + 3, and it is disjoint from the cores Di and Di+1
of all other handles of the cobordism W. Then Bi+1 can be pushed toW1.4 Since we may assume that Bi+1 is an embedded disc in W1, wemay use it to create cancelling handles H′i+1 and Hi+2 on top of W1.The attaching sphere of H′i+1 is the sphere Bi+1 which intersects thebelt sphere of Hi at a unique point. Therefore the handles H′i+1 andHi can be cancelled. Thus, the handle Hi is replaced with the handleHi+2.
10.2 The h-cobordism theorem
We say that a cobordism W between manifolds W0 and W1 is an h-cobordism if the inclusions W0 ⊂ W and W1 ⊂ W are homotopy equiv-alences.
Lemma 10.6. Let W be an h-cobordism of a path connected manifold W0.Then W has a structure of a cobordism with no 0-handles as well as no m + 1handles.
Proof. By the Handle Rearrangement Lemma we may assume that thehandles in the cobordism W are attached in the ascending order oftheir indices. Since attaching handles of index ≥ 2 does not changethe number of path components of the cobordism, we deduce thatthe initial part W0 × [0, ε] ∪ α0H0 ∪ α1H1 of the cobordism W whichcontains all handles of W of indices 0 and 1 is path connected. Infact, we may choose α0 handles of index 1 and attach them before anyother handle of index 1 so that the initial part of the cobordism W thatconsists of attaching all α0 handles of index 0, and α0 chosen handles ofindex 1 is path connected. Consider one of the 0-handles H0 and oneof the chosen 1-handles H1 abutting H0. Then the attaching sphere of

122 elements of surgery theory
H1 intersects the belt sphere of H0 at precisely one point, and thereforethe two handles H0 and H1 can be cancelled. Thus, all 0-handles of apath connected cobordism W can be paired with some of the 1-handlesand cancelled.
We may now reverse the cobordism W and cancel all 0-handles ofthe reversed cobordism from W1 to W0. Cancelling 0-handles of thereversed cobordism corresponds to cancelling (m + 1)-handles of theoriginal cobordism W.
Lemma 10.7. Let W be an h-cobordism of a connected manifold W0 of di-mension m ≥ 5. Then W has a structure of an h-cobordism handles of indicesq and q + 1 if m = 2q and q, q + 1 and q + 2 if m = 2q + 1.
Proof. By Lemma 10.6 all 0 and m + 1 handles in W can be cancelled.Next, since the relative fundamental group π1(W, W0) is trivial, wemay trade 1-handles for 3-handles. Similarly, since π1(W, W1) is trivial,we may trade 1-handles of the reversed cobordism for 3-handles (sucha trade corresponds to trading m-handles of the original cobordism Wfor m− 2-handles).
In general, we may trade handles of an h-cobordism by induction inthe ascending order of indices i = 1, 2, ... of handles until all handlesof indices i ≤ m/2− 1 are traded, and then in the descending order ofindices of handles i = m, m− 1, ... until all handles of indices m + 1−i ≤ m/2− 1 are traded (the latter corresponds to i ≥ m/2 + 2).
Let W be a manifold with boundary which is obtained from a mani-fold with boundary W ′ by attaching n handles Hα
i of the same indexi along the boundary of W ′. Here the upper index α distinguishingthe i-handles runs over the set 1, ..., n. Each handle Hα
i is attached toW ′ along a solid torus hα
i and contains a core Diα. We observe that
there is a continuous radial deformation of the pair (Hαi , hα
i ) to thepair (Di
α, ∂Diα). It defines a homotopy equivalence between W and the
topological space WCW obtained from W ′ by attaching the cores Diα of
the handles Hαi .
Lemma 10.8. Let W be a manifold with boundary obtained from a simplyconnected manifold with boundary W ′ by attaching n handles of the sameindex i. Then the group πk(W, W ′) is trivial for k < i, and it is free abelianof rank n generated by the homotopy classes [Di
α] of the n cores of the handles.
Proof. We have seen that W is homotopy equivalent to the union WCW

the h-cobordism theorem 123
5 Note that since W is an h-cobordism allgroups π∗(W, W0) are trivial.
of W ′ and the cores ∪Diα. When k < i, the image of every generic map
f representing an element in πk(WCW , W ′) misses a point in each Diα,
and therefore the representing map f can radially be deformed off thediscs Di
α to a map with image in W ′. Thus, the groups πk(W, W ′) withk < i are trivial.
Since W ′ is simply connected and the pair (W, W ′) is (i− 1)-connected,we conclude that πi(W, W ′) is isomorphic to πi(WCW/W ′) = πi(∨Si).The latter group is isomorphic to Zn.
In fact, the proof of Lemma 10.8 gives another interpretation of thegroup πk(W, W ′) which we will record as a corollary.
Corollary 10.9. Under the hypotheses of Lemma 10.8, the group πi(W, W ′)is isomorphic to the group πi(W/W ′), while the space W/W ′ is homotopyequivalent to the wedge of spheres Di
α/∂Diα.
Theorem 10.10. Every h-cobordism W of a simply connected manifold W0
of dimension 2q ≥ 5 is trivial.
Proof. We have seen that W reduces to an h-cobordism with handlesof indices q and q + 1. Let W1/2 denote the manifold obtained from W0
by spherical surgeries corresponding to the q-handles of W. Let W0,1/2
denote the initial part of the cobordism W of W0 to W1/2. It follow thatthe boundary homomorphism
∂ : πq+1(W, W0,1/2)→ πq(W0,1/2, W0)
in the long exact sequence of the triple (W, W0,1/2, W0) is an isomor-phism.5 By Lemma 10.8, the relative homotopy group πq(W0,1/2, W0)
of the initial part of the cobordism W is generated by the homotopyclasses [Dq
α] of the core discs of the q-handles, while the relative ho-motopy group πq+1(W, W0,1/2) of the terminal part of the cobordism
W is generated by the homotopy classes of the core discs Dq+1β of the
(q + 1)-handles.
As an element of the group generated by [Dqα], each class ∂[Dq+1
β ] canuniquely be written as a linear combination
∂[Dq+1β ] = ∑ kα,β[D
qα]
with some coefficients kα,β. To determine the geometric meaning ofcoefficients kα,β it is convenient to postcompose the boundary homo-morphism ∂ with the isomorphism of Corollary 10.9 onto the homo-topy group of the wedge of spheres Dq
α/∂Dqα. We can identify now

124 elements of surgery theory
each coefficient kα,β with the degree of the map
Sq = ∂Dq+1β →W0,1/2 → ∨(Dq
α/∂Dqα)→ Dq
α/∂Dqα (10.1)
which maps Sq to the attaching sphere in W1/2 ⊂ W0,1/2 and thencollapses first W0,1/2 to the wedge of spheres, and then all spheresin the wedge except for Dq
α/∂Dqα to the distinguished point. In other
words, the coefficient kα,β is the algebraic number of times the attach-
ing sphere ∂Dq+1β of the handle Hq+1
β wraps around the core disc Dqα
of the handle Hq+1β . We claim that this is the same as the algebraic in-
tersection number of the attaching sphere of the handle Hq+1β and the
belt sphere of Hqα. Indeed, the degree of the map (10.1) is the number
of signed preimages of the center 0 ∈ Dqα. Each of the signed preim-
ages corresponds to the signed intersection of the attaching sphere andthe belt sphere, which proves the claim.
Since the homomorphism ∂ is an isomorphism the matrix [kα,β] canbe diagonalized by means of elementary row and column operations.We note that reordering rows and columns correspond to reorderingq and q + 1-handles. A multiplication of a row or a column by −1corresponds to changing the orientation of a q or q + 1-handle. Finally,adding or subtracting one row to another, or one column to another,corresponds to sliding handles. Thus, without loss of generality, wemay assume that the matrix [kα,β] is the identity matrix. In particular,each handle Hα of index q corresponds to a handle Hβ of index q + 1such that the algebraic number of intersection points of the belt sphereof Hα and the attaching sphere of Hβ is 1. Since W1/2 is of dimension2q ≥ 6, we may use the Whitney trick to arrange that the belt sphere ofHα and the attaching sphere of Hβ has precisely one intersection point.Then, by the Handle Cancellation Lemma, the handles Hα and Hβ canbe cancelled.
Since the number of handles in W can always be decreased, we mayiterate the process and obtain a structure of a cobordism with no han-dles. In other words, W is a trivial cobordism.
Theorem 10.11. Every h-cobordism W of simply connected manifold W0 ofdimension 2q + 1 ≥ 5 is trivial.
Let us suppose that the cobordism W is a composition of a cobordismW[0,1] from W0 to W1 with only handles of index q, a cobordism W[1,2]from W1 to W2 with handles of index q + 1, and a cobordism W[2,3]from W2 to W3 with handles of index q + 2.

the h-cobordism theorem 125
Lemma 10.12. We have π∗(W[0,2], W0) = 0 for ∗ ≤ q.
Proof. In the long exact sequence
→ π∗+1(W, W0)→ π∗+1(W, W[0,2])→ π∗(W[0,2], W0)→ π∗(W, W0)→
of the triple (W, W[0,2], W0), the groups π∗(W, W0) are trivial since Wis an h-cobordism. On the other hand, the groups π∗+1(W, W[0,2]) aretrivial for ∗ ≤ q by Lemma 10.8. Therefore, π∗(W[0,2], W0) are trivialfor ∗ ≤ q.
Lemma 10.13. The homomorphism ∂ : πq+1(W[0,2], W[0,1])→ πq(W[0,1], W0)
is surjective.
Proof. Note that the homomorphism ∂ in the long exact sequence of atriple is followed by the homomorphism to the zero relative homotopygroup πq(W[0,2], W0). Thus, ∂ is surjective.
Proof of Theorem 10.11. We may identify the relative homotopy groupπq+1(W[0,2], W[0,1]) with the group πq+1(∨Dq+1
β /∂Dq+1β ) generated by
classes represented by the core discs Dq+1β of the handles of W of index
q + 1. Similarly, we may identify the group πq(W[0,1], W0) with the q-th homotopy group of the wedge of spheres ∨Dq
α/∂Dqα, generated by
classes [Dqα]. Then
∂[Dq+1β ] = kα,β[D
qα],
for some numbers kα,β. Furthermore, kα,β is the algebraic intersection
number of the attaching sphere of Hq+1β and the belt sphere of Hq
α inW1. We can use the elementary row and column operations to simplifythe matrix [kα,β] so that k1,1 = 1. The elementary row and columnoperations can be realized by handle moves. Therefore, we may finda handle decomposition of W such that the belt sphere of a q-handlealgebraically intersects the attaching sphere of a (q + 1)-handle at onepoint.
Suppose that 2q + 1 ≥ 7. Then using the Whitney trick we may mod-ify the attaching sphere of the (q + 1)-handle so that it intersects thebelt sphere of the q-handle at precisely one point. Then the two han-dles can be cancelled. We may repeat the argument to cancel all q-handles. Next, we may flip the cobordism W up side down to obtainan h-cobordism with only q and q + 1-handles. Finally, we repeat theargument to eliminate all q-handles. This eliminates the q + 1 handlesas well, since in this case the homomorphism ∂ is an isomorphism.

126 elements of surgery theory
Suppose now that 2q + 1 = 5. In this case we need to justify ourapplication of the Whitney trick. We note that the complement to thebelt sphere of Hq
α in W1 is diffeomorphic to the complement of theattaching sphere of Hq
α in W0. Since the dimension of the attachingsphere of Hq
α is 1, the complement to the belt sphere of Hqα in W1 is
simply connected. For this reason, we may choose the Whitney disc inthe Whitney trick disjoint from the belt sphere of Hq
α, and the attachingsphere of Hq+1
α . Thus, the Whitney trick is possible even in the case2q + 1 = 5.

Figure 11.1: Sergey Novikov, 1938–
Figure 11.2: William Browder, 1934–
11
Surgery on maps of simply connected manifolds
One of the main problems of Surgery Theory is to classify smoothclosed oriented manifolds of a given dimension.
Question 11.1. Let X be a finite simply connected CW-complex. Is Xhomotopy equivalent to a smooth closed oriented manifold of a givendimension n?
The obvious obstruction is the Poincare duality. If X is a homotopyequivalent to a closed oriented manifold of dimension n, then its co-homology and homology groups satisfy the Poincare duality: there isan integral homology class [X] ∈ Hn(X), called the fundamental class ofX, such that the cap product [X]∩ is an isomorphism of the cohomol-ogy group Hi(X) with the homology group Hn−i(X). A CW-complexwith Poincare duality will be called a geometric Poincare complex of di-mension n.
11.1 Normal maps
In this chapter all spaces will be assumed to be simply connected. Forsuch a space X, every element in the homotopy group is representedby a free (i.e., not pointed) map of a sphere to X.
To begin with let us observe that if there exists a homotopy equivalencef : X ' M of a finite CW-complex to a closed oriented manifold, thenthere also exists a vector bundle νX = f ∗T⊥M over X that plays therole of the normal bundle. To slightly simplify the notation, let ν = νM

128 elements of surgery theory
denote the perpendicular bundle of the manifold M in Rm+k, and letνX be a vector bundle over X of dimension k.
Definition 11.2. A normal map ( f , b) : (M, ν) → (X, νX) consists of amap f , and a fiberwise isomorphism b : ν→ νX covering f .
Our strategy will be to start with an arbitrary continuous normal map( f , b) from a smooth closed oriented manifold of dimension m andthen try to modify it by means of normal surgery so that it is a homotopyequivalence.
A normal cobordism between maps ( f0, b0) of (M0, ν0) and ( f1, b1) of(M1, ν0) to (X, νX) consists of a cobordism W between M0 and M1 withnormal bundle ν as well as a normal map ( f , b) : (W, ν)→ (X, νX) thatrestricts to the normal maps ( f0, b0) and ( f1, b1) over the two boundarycomponents of W. Given a normal cobordism, we say that ( f1, b1) isobtained from ( f0, b0) by a normal surgery. When W is a sphericalcobordism between M0 and W1, we say that ( f , b) is a spherical normalcobordism.
When necessary we may embed the finite CW-complex X into a highdimensional Euclidean space, and then replace X with its ε-neighbor-hood in the Euclidean space, which is homotopy equivalent to X. Inother words, whenever it is convenient we may assume that the CW-complex X is a high dimensional manifold. In particular, we mayassume that f : M → X is an embedding. We will denote the groupπk+1(X, M) by πk( f ). In other words, an element of πk( f ) is repre-sented by a map i : Sk → M as well as a map Dk+1 → X extending themap f i. The groups πk( f ) fit a long exact sequence.
· · · → π∗( f )→ π∗(M)f∗−→ π∗(X)→ π∗−1( f ) · · ·
We aim to modify the normal map f by normal surgery to a homotopyequivalence, i.e., we aim to kill homotopy groups of f .
Suppose not all homotopy groups of f are trivial. Suppose there isan element λ 6= 0 in πq( f ) where q ≤ m/2. It is represented by anembedding i : Sq → M as well as an extension j : Dq+1 → X of the mapf i. We may assume that j is an inclusion. Denote the image of i byS′ and the image of j by DX . Let us investigate under what conditionsthere exists a normal surgery along λ and what effect it has on π∗( f ).We will only sketch the argument as it very similar to one in Chapter 5.
As any vector bundle over a disc, the restriction of νX to the disc DX
is trivial, i.e., there exists a frame e1, .., ek of the vector bundle νX over

surgery on maps of simply connected manifolds 129
1 In literature, the invariant µ(λ) is of-ten defined differently, as a homotopyobstruction O(λ).
Theorem 11.3. The obstruction to the ex-istence of a spherical surgery along S is anelement O(λ) ∈ πqVk(R
m+k−q).
Proof. As in the case of surgery on man-ifolds, we observe that the normal bun-dle of D in Rm+k × [0, 1] is trivial andadmits an essentially unique trivializa-tion v1, .., vm+k−q. Then, for each pointx ∈ S, the vectors τ1, ..., τk define an ele-ment in Vk(R
m+k−q). Thus we definedan element O(λ) in πqVk(R
m+k−q). Itcan be shown that O(λ) is a completeobstruction to the existence of a spheri-cal surgery along S.
2 Indeed, recall the following lemmawhere n = q.
Lemma 11.4. Let W be a spherical cobor-dism between W0 and W1 of index n + 1 ≤m/2, where m is the dimension of the man-ifolds W0 and W1. Suppose that the at-taching sphere of the corresponding surgeryrepresents an element x ∈ πnW0. ThenπiW0 = πiW1 for i < n, while πnW1 isa factor group of πnW0 by a subgroup con-taining x.
the disc DX . Since the vector bundle ν over S′ is fiberwise isomor-phic to νX over ∂DX , the frame e1, ..., ek defines a frame τ1, ..., τk of theperpendicular bundle of M over S′. We may extend the vector fieldsτ1, ..., τk to a frame of the perpendicular bundle of M near S′, and thenextend it further to a neighborhood of S′ in Rm+k. We will regard thedirections of the vector fields τ1, ..., τk as vertical up.
Let D′ be a disc in Rm+k × [0, 1] bounded by S′ ∈ Rm+k × 0 suchthat the collar neighborhood of S in D is of the form S× [0, ε). Choosean orthonormal frame v′ = v′i of the perpendicular bundle of D′.By the Multicompression theorem, there is a small ambient isotopy Ft
of S to a sphere F1S in Rm+k that brings vector fields v′i over S′ to τi
over F1S′ for i = 1, ..., k. The ambient isotopy extends to an isotopy ofRm+k × [0, 1] and brings the disc D′ with vector fields v′i to a disc Dwith normal vector fields vi.
We then compress F1S′ to its projection S in M along the vertical upplanes 〈τ1, ..., τk〉, and slightly perturb S so that S is immersed. We saythat S is the Wall representative of the class λ. We note that the frameτ1, ..., τk of M over S extends to the normal vector fields v1, ..., vk overD. Furthermore, when S is embedded, it has a frame v1, ..., vm−q+k
which extends over D.
If the Wall representative S is embedded, then a normal surgery alongλ is possible. Indeed, the disc D together with v1, ..., vm−q+k is a basefor framed surgery. Thus there exists a spherical cobordism W ≈ M ∪D of the manifold M. Furthermore, the vector bundle ν extends to avector bundle νW over W by means of vector spaces 〈v1, ..., vk〉. Finally,there is a map (W, νW)→ (X, νX) which restricts to the map ( f , b) over(M, ν), takes D isomorphically to its copy DX in X and sends νW overD to νX over DX by vi 7→ ei.
In general the Wall representative S′ may not be embedded. Let µ(λ)
denote the algebraic number of self-intersection points of S′. If q <
m/2, then µ(λ) is trivial. Otherwise, it is an integer when q is even, andan element in Z2 when q is odd.1 As in the case of framed cobordisms,we can show that the invariant µ(λ) is well-defined. On the otherhand, if m ≥ 5, then a normal surgery along λ is possible if and onlyif µ(λ) = 0, as in the case µ(λ) = 0 we may assume by the Whitneytrick that the Wall representative S of λ is embedded.
When a normal surgery along λ is performed the class λ is killed,while the homotopy groups πi( f ) are preserved for i < q.2

130 elements of surgery theory
3 It is tempting (but wrong) to assumethat Cn(X × Y) = ∑ CiX × Cn−iY. Forexample, suppose that X consists of justone cell Di and Y consists of one cellDn−i . Then CiX = Cn−iY = Z. We notethat X× Y consists of just one cell Dn =Di × Dn−i and therefore Cn(X × Y) isisomorphic to Z = Z⊗Z, not Z×Z.
Theorem 11.5. A normal map ( f , b) : (M; ν) → (X; νX) of a manifold ofdimension m = 2q or m = 2q + 1 with m ≥ 5 is normally cobordant to aq-connected normal map.
In order to make a normal map (q + 1)-connected we need to studyintersection forms on M and X. Unfortunately, there is no nice ge-ometric interpretation for intersection forms on homotopy groups ofa CW-complex X. For this reason, we need to pass from homotopygroups to (co)homology. In the next section we formulate and provesome of the properties of (co)homology groups which need to studysurgery on maps.
11.2 Products in homology and cohomology
11.2.1 Tensor products
Let A and B be abelian group. Then the tensor product A ⊗ B is theabelian group generated by elements a ⊗ b where a ∈ A and b ∈ Bsubject to the relations
(a + a′)⊗ b = a⊗ b + a′ ⊗ b,
a⊗ (b + b′) = a⊗ b + a⊗ b′.
We note that a ⊗ b is a (complicated) name for a single element inA⊗ B. Not every element in A⊗ B is of the form a⊗ b. In general, anelement in A⊗ B is of the form a1 ⊗ b1 + · · ·+ an ⊗ bn.
Frequently, the tensor product of abelian groups A ⊗ B is defineddifferently, by its universal product. Namely, we say that the ten-sor product A ⊗ B of abelian groups A and B is an abelian grouptogether with a bilinear map A × B → A ⊗ B which satisfies theuniversal property that for any abelian group C, any bilinear mapA × B → C can be uniquely written as a composition of the canon-ical map A× B→ A⊗ B and a homomorphism A⊗ B→ C.
Example 11.6. Let X and Y be two CW-complexes. Then the chaincomplex C∗(X × Y) is canonically isomorphic to the tensor productC∗X ⊗ C∗Y of chain complexes, i.e., Cn(X × Y) = ∑ CiX ⊗ Cn−∗Y.3 Itfollows that the differential on C∗(X × Y) is defined by d(c ⊗ c′) =
dc⊗ c′ + (−1)deg(c)c⊗ dc′. Similarly, we can identify C∗(X × Y) withC∗X⊗ C∗Y and δ(c⊗ c′) = δc⊗ c′ + (−1)deg(c)c⊗ δc′.

surgery on maps of simply connected manifolds 131
4 Equivalently, there is a commutative di-agram
H∗Xf ∗←−−−−− H∗Y
∪ f ∗by ∪b
yH∗X
f ∗←−−−−− H∗Y.
5 Equivalently, there is a commutative di-agram
H∗Xf ∗←−−−−− H∗Y
x∩y f∗x∩
yHn−∗X
f∗−−−−−→ Hn−∗Y.
6 For example, to prove the naturalityproperty for the cap product, let us de-note representatives of homology class xand the cohomology class y by the sameletters. Then, by definitions of products,
f∗(x ∩ f ∗y) = f∗[∆∗x/ f ∗y]
= f∗[∑ xi ⊗ x′i/ f ∗y]
= f∗[∑〈 f ∗y, x′i〉xi ]
= ∑〈 f ∗y, x′i〉 f∗xi
= ∑〈y, f∗x′i〉 f∗xi
= ∑ f∗xi ⊗ f∗x′i/y
= ∑ ∆∗( f∗x)/y
= f∗x ∩ y.
The cap-cap product is proved similarly:
u(x ∩ v) = u(∆∗x/v)
= u(∑ xi ⊗ x′i/v)
= u(∑ v(x′i)xi)
= ∑ v(x′i)u(xi)
= ∑〈u⊗ v, xi ⊗ x′i〉= 〈u⊗ v, ∆∗x〉= 〈∆∗(u⊗ v), x〉= (u ∪ v)(x).
11.2.2 Naturality of the cup and cap products
Recall that the diagonal map X → X × X of a CW-complex X canalways be approximated by a cellular map ∆ : X → X×X which sendseach cell of degree i to cells of degrees ≤ i. The cup product [x] ∪ [y]of cohomology classes in X is defined to be the class [∆∗(x ⊗ y)]. Itfollows that the cup product is natural in the sense that for any mapf : X → Y of CW-complexes, and any cohomology classes a, b in H∗Y,we have 4
f ∗(a ∪ b) = f ∗a ∪ f ∗b.
The slant product Hn(X × X)⊗ HkX → Hn−kX is defined in terms ofcochains by a⊗ a′/b 7→ b(a′)a. Finally, the cap product HnX⊗ HkX →Hn−kX is defined again in terms of cochains by a⊗ b 7→ ∆∗a/b. Thecap product also satisfies the naturality property that for any mapf : X → Y of CW-complexes, and any classes x ∈ HnX and y ∈ HkY,we have5
f∗(x ∩ f ∗y) = f∗x ∩ y.
The cap and cup product are related by means of the cap-cup formula
u(x ∩ v) = (u ∪ v)(x)
for any u ∈ CkX, v ∈ Cn−kX and x ∈ CnX.
Exercise 11.7. Prove the naturality properties of the cup and cap prod-uct, as well as the cap-cup formula.6
The products on homology and cohomology groups can also be de-fined for pairs (Y, X) of CW-complexes. We recall that the chain com-plex C∗(Y, X) is defined to be the factor chain complex C∗Y/C∗X.Hence, we may define the diagonal map
∆ : C∗(Y, X)→ C∗Y⊗ C∗(Y, X).
To this end, we observe that every chain c ∈ C∗(Y, X) is represented bya chain b ∈ C∗Y, and therefore we may define ∆(c) by the projectionof ∆∗b. The map ∆ is well defined. Indeed, if b and b′ are two differentrepresentatives of c, then b′ = b + a, where a ∈ C∗X. On the otherhand, the projection of ∆∗a is zero. The diagonal map ∆ allows us todefine products of pairs of spaces. The cup product
∪ : H∗Y⊗ H∗(Y, X) −→ H∗(Y, X)
is defined by a⊗ b 7→ ∆∗(a⊗ b). The two cap products
∩ : Hn(Y, X)⊗ HkX −→ Hn−k(Y, X),

132 elements of surgery theory
7 Indeed, we have u · v = (U ∪ V)[X] =U([X] ∩V) = U(v).
∩ : Hn(Y, X)⊗ Hk(Y, X) −→ Hn−kY
are defined by a ⊗ b 7→ ∆(a)/b and a ⊗ b 7→ ∆′(a)/b, where ∆′ isdefined similarly to ∆ except that the target space of ∆′ is C∗(Y, X)⊗C∗Y.
11.2.3 Poincaré Duality
A Poincaré complex of formal dimension m is a CW-comples X togetherwith a so-called funamental class [X] in HmX such that the cap productmap
[X]∩ : HkX −→ Hm−kX
is an isomorphism for all k. For example, every closed oriented con-nected manifold X of dimension m is a a Poincaré complex of formaldimension m. To define its fundamental class, choose a CW-structureon X such that the orientation of any cell em
α of dimension m agreeswith the orientation of X. Then the fundamental class [X] is repre-sented by the chain ∑[em
α ] where the sum ranges over all cells of di-mension m. Similarly, a pair (Y, X) of CW-complexes with a homologyclass [Y] ∈ Hm(Y, X) is a Poincaré pair if the two cap product homo-morphisms
[Y]∩ : Hk(Y, X) −→ Hm−kY,
[Y]∩ : HkY −→ Hm−k(Y, X)
are isomorphisms for all k.
Given a cohomology class U of a Poincaré complex X, we will de-note the Poincaré dual class [X] ∩U by u. There is a so-called Poincarépairing:
HkX⊗ Hm−kX −→ Z
which is a homomorphism that takes u⊗ v to the integer (U ∪ V)[X]
which we denote by u · v. The number u · v can also be computed asU(v).7
Maps f : X → Y of Poincare duality spaces of formal dimensions mand n respectively define the so-called Umkehr homomorphisms in ho-mology and cohomology groups in the “wrong" direction. Namely,there is a well-defined homomorphism
f! : H∗Y −→ H∗X
defined by taking a class v ∈ H∗Y, converting it to a cohomology classV, pulling it back to the class U = f ∗V in H∗X, and then converting it

surgery on maps of simply connected manifolds 133
8 The homomorphism f! is defined byconverting a homology class v to a coho-mology class V such that v = [Y′] ∩ V,pulling it back to U = f ∗V and thenconverting it to a homology class u =[Y] ∩ U. The homomorphism f ! is de-fined similarly by converting U to a ho-mology class u, pushing it forward to v,and the converting it to a cohomologyclass V.
9 To see that the map f∗ is surjective, notethat every element x ∈ H∗X is the imageunder f∗ of the element f!(x). Indeed,f∗ f!(x) = id(x) = x.
back to a homology class u in H∗X. Similarly, the Umkehr map
f ! : H∗X −→ H∗Y
is defined by coverting a cohomology class U ∈ H∗X to a homologyclass u, sending it to class v = f∗u in H∗Y, and then converting it to aclass V in H∗Y.
Definition 11.8. A map f : X → Y of Poincaré complexes is of degreeone if f∗[X] = [Y].
Lemma 11.9. If f : X → Y is a map of degree one, then f∗ f! = id andf ! f ∗ = id.
Proof. Recall that by the naturality of the cap product, we have f∗([X]∩f ∗V) = [Y] ∩V. Since the homomorphism ([Y]∩) can be inverted, wehave
([Y]∩)−1 f∗([X] ∩ f ∗V) = V,
where on the left hand side we have f ! f ∗V. On the other hand, sincef!([Y] ∩V) = [X] ∩ f ∗Y, the naturality property can also be written as
f∗ f!([Y] ∩V) = [Y] ∩V,
which completes the proof of the Lemma.
Similarly, for maps f : (Y, X)→ (Y′, X′) of pairs of Poincaré complexes,there are Umkehr homomorphisms8
f! : H∗(Y′, X′)→ H∗(Y, X), f ! : H∗(Y, X)→ H∗(Y′, X′).
When f∗[Y] = [Y′], i.e., when f is of degree one, we have f∗ f! = idand f ! f ∗ = id.
11.3 Degree one maps
We recall that a map f : M→ X of Poincaré complexes is of degree oneif f∗[M] = [X]. We have seen that if f is a map of degree one, thenf∗ has a left inverse f!. In particular, the map f∗ is split surjective.9
Similarly, the map f ∗ is split injective. In particular, there are canonicalisomorphisms
H∗M ≈ H∗X⊕ K∗M H∗M ≈ H∗X⊕ K∗M

134 elements of surgery theory
10 We have
u · ([M] ∩ f ∗V) = 〈 f ∗V, u〉
= 〈V, f∗u〉 = 0,
since u ∈ ker f∗.
11 If U = f ∗V, then u = [M] ∩ U isf!([X] ∩V).
12 In fact, we have shown that there isa commutative diagram of Poincaré iso-morphisms:
K∗M ←−−−−− H∗M ←−−−−− H∗Xy y yKm−∗M −−−−−→ Hm−∗M −−−−−→ Hm−∗X.
where H∗X and H∗X are identified with the images of f! and f ∗, whileK∗M and K∗M are the subgroups ker f∗ and ker f !.
The groups K∗M and K∗M will be the primary objects of our study.These groups measure the difference between the (co)homology groupsof M and X. Note that in the study of cobordisms of framed manifolds,the main objective is to simplify a given framed manifold M by killingall homotopy or, equivalently, (co)homology groups of M by surgery.In the study of cobordisms of normal maps, in order to approximateX by M, the main objective is not to kill all (co)homology classes of M,but to kill all classes in the canonical subgroups K∗M and K∗M of the(co)homology groups of M.
We will show that the groups K∗M and K∗M share many properties ofhomology and cohomology groups of manifolds. For example, recallthat for a closed connected oriented manifold M of dimension m = 2qthere is a non-degenerate intersection form, called the Poincaré paring,
Hq(M; k)⊗ Hq(M; k) −→ k
where k is either Q or Z2. It turns out that when f : M → X is adegree one map to a Poincaré complex, the subspaces Kq(M; k) andHq(X; k) are perpendicular. Indeed, if u and f!v are two homologyclasses in the two subspaces respectively, then u · f!v = 0.10 In par-ticular, the intersection form on Hq(M; k) restricts to a non-degenerateintersection form on Kq(M; k). If we now restrict the cap homomor-phism [M]∩ to K∗M, then we obtain a map U 7→ [M] ∩U to Km−∗M.Indeed, suppose that U is a class in K∗M = ker f !. Then the classu = [M] ∩ U is in the kernel of f∗ which implies that u ∈ Km−∗M.Similarly, the cap product [M]∩ sends the subgroup H∗X of H∗M tothe subgroup Hm−∗X of Hm−∗M.11 By dimensional counting now,the map [M]∩ : K∗M → Km−∗M is an isomorphism, which we callthe Poincaré isomorphism.12 The Universal coefficient theorem for thegroups K∗M and K∗M also holds true:
Kk M ' Tor Kk−1M⊕ Free Kk M.
Theorem 11.10. Let M be a simply connected closed manifold of dimensionm = 2q or m = 2q + 1. If f : M→ X is a map of degree 1 into a simply con-nected Poincaré complex such that Ki M = 0 for i ≤ q, then f is a homotopyequivalence.
Proof. Suppose that K∗M = 0 in degrees ≤ q. By the Poincaré duality,the groups K∗M are trivial for ∗ ≥ m− q. Therefore, by the UniversalCoefficient Theorem, the groups K∗M are trivial for ∗ ≥ m − q. It

surgery on maps of simply connected manifolds 135
13 Relative Hurewicz Theorem: Let(X, A) be a pair of simply connectedCW-complexes. Suppose that the groupsπ∗(X, A) are trivial for ∗ < n. Thenthe groups H∗(X, A) are isomorphic toπ∗(X, A) for ∗ ≤ n.
follows that f is a homology isomorphism. Since M and X are simplyconnected, the map f is a homotopy equivalence.
We note that a normal cobordism of a map M → X is a normal mapof pairs f : (W, M) → (Y, X) where Y = X × [0, 1]. For this reason, wewill need to extend our discussion to normal maps of pairs, which isstraightforward. For example, there are canonical isomorphisms
H∗(W, M) ≈ H∗(Y, X)⊕K∗(W, M), H∗(W, M) ≈ H∗(Y, X)⊕K∗(W, M),
where H∗(Y, X) and H∗(Y, X) are identified with the images of f! andf ∗, while K∗(W, M) and K∗(W, M) are the subgroups ker f∗ and ker f !.As above, we have Poincaré duality isomorphisms
K∗(W, M) ≈ Km−∗W, K∗W ≈ K∗(W, M).
Next, as in the case of cobordisms of framed manifolds, we will needto define invariants of normal maps f : the signature σ( f ) and the Arfinvariant Arf( f ).
When m = 2q with q even, we choose the coefficient field k to be Q. Inthis case, since the intersection form on Hq(M; k) is the direct sum ofthe intersection forms on Hq(X; k) and Kq(M; k), the signature σ(M)
is the sum of σ(X) as well as the signature σ( f ) of the intersectionform on Kq(M; k). Since σ(M) and σ(X) are invariant with respect tocobordisms, we deduce that σ( f ) is an invariant of cobordisms as well.
Suppose now that m = 2q + 1, and the map f is q-connected. Bythe Relative Hurewicz Theorem,13 the group Kq(M) is isomorphic toπq( f ), and therefore the function µ which we previously defined onπq( f ) can be regarded as a function on Kq(M; Z2). As in the caseof the framed cobordisms, µ is a quadratic form associated with theintersection form on Kq(M; Z2). We define the Arf-invariant Arf( f )to be the Arf-invariant of the quadratic form µ. Again, as in the caseof framed cobordisms, we can show that Arf( f ) is well-defined, and,in fact, it can be defined for arbitrary (not necessarily q-connected)normal maps M → X of a simply connected closed manifold M to asimply connected Poincaré complex X.
11.4 The Browder-Novikov theorem
Theorem 11.11. (Browder-Novikov) Let f : M → X be a normal map ofdegree 1 of a manifold of dimension 2q > 4 to a simply connected Poincaré

136 elements of surgery theory
14 Indeed, the group Kq M ≈ Kq M isisomorphic to Free Kq M ⊕ Tor Kq−1 M,while the group Kq−1 M is trivial by as-sumption.
15 Recall that Hq M ≈ HqX⊕ Kq M
space. If q is even, then f is normally cobordant to a homotopy equivalence ifand only if the signature of f is zero. If q is odd, then f is normally cobordantto a homotopy equivalence if and only if the Kervaire invariant is zero.
Proof. We have seen that when q is even, signature is an invariantof normal cobordism, and when q is odd, the Kevaire invariant doesnot change under normal cobordism. Thus, the existence of a normalcobordism of f to a homotopy equivalence implies that σ( f ) = 0 whenq is even and Arf ( f ) = 0 when q is odd.
Suppose now that q is even and σ( f ) = 0. By Theorem 11.5, we mayassume that Ki M = 0 for i < q. By the Poincaré duality togetherwith the Universal Coefficient theorem, we deduce that Kq M is a freeabelian group.14 As in the case of framed cobordisms, we deduce thatthere is a class λ ∈ Kq M such that µ(λ) = 0. Without loss of generality,we may assume that λ is a free generator of Kq M. Then it is also a freegenerator of Hq M, and, as in the case of framed cobordisms, a normalsurgery along λ kills the factor in Kq M generated by λ. After finitelymany normal surgeries along generators of Kq M we get a trivial groupKq M. By Theorem 11.10, then, the map f is a homotopy equivalence.
Suppose now that q is odd and Arf ( f ) = 0. We may assume thatKi M = 0 for i < q, and, in particular, Kq M is free. By the Hurewiczisomorphism, we may identify Kq M with πq M. Therefore, applyingthe argument as in the case of framed cobordisms, we find finitelymany surgeries which eliminate Kq M. Then f is a homotopy equiva-lence.
Theorem 11.12. (Browder-Novikov) Every normal map f : M → X of de-gree 1 of a simply connected manifold of dimension 2q + 1 ≥ 5 to a simplyconnected Poincaré complex is normally cobordant to a homotopy equivalence.
Proof. The argument is completely the same as in the case of the framedsurgery. By Theorem 11.5, we may assume that Ki M = 0 for i < q,and Kq M is finite. When q is even, a surgery along a torsion classλ ∈ Kq M, results in creating a free class λ′ which may then be can-celled, see Lemma 6.17.15 Thus when q is even, pairs of surgeriesreduce M to a manifold homotopy equivalent to X. When q is odd, wemay use series of surgeries to kill Kq M ⊗Zp without increasing theorder of Kq M. This implies that until Kq M is trivial, its order of Kq Mcan be decreased.Therefore, again, the manifold M can be modified bysurgery to a manifold homotopy equivalent to X.

12
The surgery long exact sequence
In this section we aim to introduce and prove the long exact sequencefor simply connected finite CW-complexes X:
· · · −→ N∂(X× I) −→ Ln+1 −→ S(X) −→ N (X) −→ Ln,
where Ln is 0, Z2, 0, Z depending on the residue class of n mod 4.
In short, for the existence of homotopy equivalence M→ X we need toassume that X is a Poincare complex, and there exists a vector bundleξ over X that plays the role of the normal bundle. We will see thatthe spherization class of ξ is essentially unique. The set S(X) is theset of manifolds homotopy equivalent to M. If M ∈ S(X) exists, thenthe homotopy equivalence M → X is a normal map. The normalcobordism group of normal maps M → X is denoted by N (X). Wehave already seen that the obstruction to surging a map M → X to ahomotopy equivalence is precisely an element in Ln.
Let F and X are finite CW-complexes. A homotopy F-fibration Y → Xis a map whose homotopy fiber is homotopy equivalent to F. Homo-topy fibrations f : Y → X and f ′ : Y′ → X are said to be equivalent ifthere exists a homotopy equivalence h : Y → Y′ such that f = f ′h. LetH(F) denote the monoid of homotopy self-equivalences of F equippedwith the compact-open topology. There is a simplicial construction ofthe classifying space BH(F). The space BH(F) enjoys the standardclassifying property.
Theorem 12.1 (Stashef). For every finite CW-complex X there is a bijec-tion between [X, BH(F)] and the set of equivalence classes of homotopy F-fibrations to X.

138 elements of surgery theory
We will be interested in homotopy spherical fibrations. To begin withobserve that a space S is a homotopy sphere iff it is a simply connectedhomology sphere.
Theorem 12.2. Let X be a simply connected finite Poincare duality space ofdimension m embedded into Rm+k. Let V → X is the homotopy projection ofa tubular neighborhood to X, ie., homotopy inverse to the incusion X → V.Then the restriction map ∂V → X is a homotopy Sk−1-fibration.
Remark 12.3. A tubular neighborhood can be defined by means of a tri-angulation. Since X is finite we may assume that it is triangulated andits triangulation agrees with some triangulation on Rm+k. A tubularneighborhood can be defined to be the star of X in the second barycen-tric triangulation of Rm+k. The space X is a deformation retract of itstubular neighborhood and V \ X is homotopy equivalent to ∂V.
Proof. Let F denote the homotopy fiber of the inclusion ∂V → V ' X.By the Poincare duality Hq(V/∂V) ' Hm+k−qV; in particular, there isa class U such that ∩U takes the fundamental class of the former spaceto the fundamental class of the latter space. It follows that ∪U : HqV →Hk+q(V/∂V) is an isomorphism. Since X is finite, a general positionargument shows that πi(V \X)→ πiV is an isomorphism for i < k− 1and onto for i = k− 1. We get
πi(∂V)→ πi(V \ X)→ πi(V)
is an isomorphism for i < k− q and onto for i = k− 1. By the RelativeHurevicz theorem, πi−1(F) = πi(V/∂V) = 0 for i < k − 1. Alsoπk−1(F) = Hk(V/∂V) = Z since in this dimension there is no torsion(Hk+1(V/∂V) = 0) and Hk(V/∂V) = Z. Thus it remains to show thatHiF = 0 for i ≥ k. Consider the spectral sequence for a homotopyfibration ∂V → V.

the surgery long exact sequence 139
k− 1 Z ∗ ∗ ∗∗ 0 0 0 0
∗ 0 0 0 0
2 0 0 0 0
1 0 0 0 0
0 Z ∗ ∗ ∗
0 1 2 3
Clearly, in E2 we have that the 0 line is isomorphic to the (k − 1)-stline and the isomorphism is given by taking the cup product with U.Chasing the spectral sequence one shows that F is a homology sphere.Therefore the map ∂U → U is a homotopy Sq−1-fibration.
In other words, for every finite CW-complex X we obtain a map ν : X →BGk → BG classifying the spherical fibration ∂V → X, where Gk is thespace of homotopy self-equivalences of the sphere Sk−1 and BG thecolimit of spaces BGk. It turns out that the map ν does not dependon choices we made in the construction and is called the normal Spi-vak fibration. We observe now that if X is homotopy equivalent to amanifold, then its classifying map ν lifts to a a map to BO. There is afibration
G/O −→ BO −→ BG.
One can show that the obstruction to the existence of a lift is an elementin [X, B(G/O)] (see Madsen-Milgram, p.40) and a fixed lift identifiesthe set of lifts with [X, G/O].
Now, fix a lift X → BO. Then we have considered the group of normalcobordisms M → X. Such a group is denoted by N (X). Let S(X)
denote the set of h-cobordant equivalences M→ X. In other words, anelement in S(X) is represented by a homotopy equivalence f : M→ X.Two homotopy equivalences f , f ′ represente the same element in S(X)
if there exists a homotopy equivalence (F, f , f ′) : (W, M, M′) → (X ×[0, 1], X × 0, X × 1 which is an h-cobordism. Suppose M → Xis a homotopy equivalence representing a class α ∈ S(X); choose ahomotopy inverse g : X → M. Then g∗ν is a lift of the normal Spivakfibration where ν is the normal bundle of M. Consequently α definesan element in N (X). In other words we have a map S(X) → N (X).An element in N (X) lifts to S(X) if its invariant in Ln is trivial. In

140 elements of surgery theory
other words we have an exact sequence
S(X)→ N (X) −→ Ln.
It turns out that this exact sequence can be extended from the left handside; it is called the exact sequence of surgery theory.

13
(Co)homology with twisted coefficients
In this chapter we consider a more general question. Namely, letf : M → X be a map of a closed manifold M ⊂ Rm+k of dimensionm into a CW-complex X. We would like to determine under whatconditions there is a surgery on f which turns f into a homotopyequivalence.
If X is homotopy equivalent to a manifold M′ ⊂ Rm+k, then the homo-topy equivalence takes the perpendicular vector bundle T⊥M′ to a vec-tor bundle ν over X, which leads us to studying normal maps f : M→ X,i.e., maps f equipped with fiberwise isomorphisms T⊥M → ν cover-ing f . Also, if X is homotopy equivalent to a manifold, then certainhomology and cohomology groups of X should be Poincaré dual toeach other. The homology and cohomology groups here are thosewith coefficients in the group ring Z[π1X].
In this section we will introduce homology and cohomology of a CWcomplex X with coefficients in Z[π1X]. In section 13.1 we introducethe group ring Z[π1X], and use it to extend the Whiney trick con-struction to the case of spheres embedded into a non-simply connectedmanifold. Next, in section 13.2 we review the definition of right andleft Z[π]-modules. In particular, we note that πnX is a left Z[π1X]-module. In §13.3 we define (co)homology with local coefficients in aZ[π]-module, and in §13.4 review various products. In particular, wereview the definition of the cap product and formulate the Poincaréduality theorem for closed (possibly non-orientable) manifolds.
A CW-complex X is said to be a Poincaré duality complex if its homol-ogy H∗X and cohomology H∗X with coefficients in Z[π] are related bymeans of the Poincaré duality, see §13.5. In particular, the CW-complex

142 elements of surgery theory
1 In other words, we fix an equivalenceclass of bases for Ts M, where two basesare equivalent if the determinant of thelinear transformation which takes thefirst basis into the second one is positive.
possesses a distinguished homology class [X] called the fundamentalclass. A map f : M → X is a degree one map if it takes the funda-mental class of M to the fundamental class of X. It follows that fora degree one map H∗M is isomorphic to H∗X ⊕ K∗M for a Z[π1X]-module K∗M. We will see in the next chapter that when m = 2q orm = 2q + 1, there is no obstruction in modifying f by normal surgeryinto a q-connected map for which Ki M = 0 when i < q. On theother hand, if f is (q + 1)-connected, then it is a homotopy equiva-lence. Thus it remains to study the question under what conditionsthe Z[π1X]-module K = Kq M can be eliminated by normal surgery off . In §13.7 we show that when m = 2q, the module Kq M is a finitelygenerated stably free Z[π1X]-module.
13.1 The Whitney trick in non-simply connected manifolds
In the case of non-simply connected manifolds M, the role of the coef-ficient ring is played by the group ring Λ = Z[π1M]; it is the ring offinite formal linear combinations n1g1 + · · ·+ nkgk where ni ∈ Z andgi ∈ π1M with ring operations
∑ ngg + ∑ mgg = ∑(ng + mg)g, ∑ ngg ·∑ mhh = ∑ ngmhgh.
Exercise 13.1. Show that Z[π1S1] consists of Laurant polynomials
a−kx−k + · · ·+ a−2x−2 + a−1x−1 + a0 + a1x + a2x2 + · · ·+ asxs,
while Z[π1RP2] is the polynomial ring Z[x] quotiened by x2 − 1.
We note that without the ring multiplication, Λ is a free abelian groupwith generators corresponding to elements in π1M.
The group ring Λ appears already in the Whitney trick for non-simplyconnected manifolds. Indeed, let M be a connected manifold of di-mension m = 2q > 4 oriented at a reference point s,1 and S1, S2 betwo oriented spheres of dimension q immersed into M with referencepoints s1 and s2 respectively. Suppose that the spheres S1 and S2 arethreaded, i.e., each sphere Si is equipped with a path wi in M from thereference point s of M to the reference point si on Si. For each inter-section point xj of S1 and S2, choose a path uij on Si from si to xj.Then for each intersection point x = xj, the space Tx M inherits twoorientations. One orientation of Tx M comes from the orientation ofTxS1 followed by the orientation of TxS2.

(co)homology with twisted coefficients 143
2 We follow the convention which is usedin the definition of the group operationin π1 M. Recall that the group opera-tion in π1 M is defined by concatenation.Namely in terms of representatives theproduct of two loops γ1 and γ2 is an ap-propriately reparametrized loop γ1 ∗ γ2which is the path that first follows γ1and then follows γ2. Thus, the curvew1 ∗ u1j denotes the path which first fol-lows w1 and then u1j.
3 If the manifold M is oriented, then wemay use the orientation on M to definethe second orientation on Tx M.
4 Hint for Exercise 13.2 If λ(S1, S2) =0, then each ε(xi)g(xi) appears in pairwith ε(xj)g(xj) where g(xi) = g(xj) andε(xi) = −ε(xj). The points xi and xj canbe canceled by the Whitney trick alonga disc D providing a null-homotopy ofu1i ∗ u−1
2i ∗ u2j ∗ u−11j ; note that a neigb-
horhood of the disc D in M is orientedand simply connected, and therefore wemay refer to the Whitney trick that wediscussed in the simply connected case.
5 Hint for Exercise 13.3: Choose a ho-motopy S of S1 to S′1 and a homotopyS′ of S2 to S′2 in M × [0, 1]. We mayassume that S and S′ intersect transver-sally along a submanfold Σ of M× [0, 1]of dimension 1. The endpoints of thesubmanifold Σ establish an equivalencebetween λ(S1, S2) and λ(S′1, S′2).
6 Hint for Exercise 13.4 Note that ife1, ..., eq is the orientation at xj of thesheet of S containing u1j and f1, ..., fq isthe orientation at xj of the sheet of S con-taining u2j, then interchanging u1j withu2j leads to a replacement of bases:
(e1, ..., eq, f1, ..., fq) 7→ ( f1, ..., fq, e1, ..., eq).
This is an orientation preserving changeof basis if q is even, and orientation re-versing otherwise.
For the second orientation, choose a basis ei(t) of the vector spaceTt M for every point t on the concatenation2 curve u1j ∗ w1 so thatthe components of the vectors ei(t) change continuously with t andso that ei(s) is a positive basis of Ts M. The second orientation ofTx M is defined to be that of ei(x).3 If the two orientations on Tx Magree, then the intersection point x is positive and we write ε(x) = 1,otherwise x is negative and we put ε(x) = −1. The obstruction tocanceling all intersection points of the spheres S1 and S2 by regularhomotopy of S1 and S2 is the element
λ(S1, S2) = ∑ ε(xj)g(xj)
in Λ = Z[π1M], where g(xj) is the concatenation w2 ∗ u2j ∗ u−11j ∗ w−1
1of the chosen paths from s to xj through s2 and then from xj to sthrough s1.
Exercise 13.2. Show that λ(S1, S2) is a complete obstruction to cancel-ing all intersection points by Whitney moves. In particular, if λ(S1, S2) =
0 and S1 and S2 are embedded, then there is an isotopy of S1 to a sub-manifold in M disjoint from S2. If λ(S1, S2) = 0, and S1 and S2 areimmersed, then there is a regular homotopy of S1 to an immersed sur-face in M disjoint from S2.4
Exercise 13.3. Show that if S′1 and S′2 are two immersed spheres ho-motopic to S1 and S2, then λ(S1, S2) = λ(S′1, S′2).
5
A similar argument works for self-intersections. Indeed, let S be asphere of dimension q immersed into a manifold M of dimension m =
2q. Again, choose a basepointe p in M and s in S, an orientationof Tp M, a path w from p to s, and for each self-intersection point xj
two paths u1j and u2j from s to xj in S so that u1j and u2j approchxj along different intersecting sheets. Finally, define µ(S) to be thelinear combination ∑ ε(xj)g(xj) in Λ, where g(xj) is the concatenationw ∗ u2j ∗ u−1
1j ∗ w−1 and ε(xj) is the orientation of the self-intersectionpoint xj. If µ(S) = 0, then all self-intersection points can be eliminatedby regular homotopy of S. If µ(S) 6= 0, then it might be possible tochange the order of u1j and u2j so that the invariant is zero.
Exercise 13.4. Show that interchanging u1j with u2j replaces g withg−1, and ε with (−1)qw(xj)ε, where w(xj) = w(g(xj)) is 1 if the orien-tation of M along g = g(xj) is preserved and w(xj) = −1 otherwise. Inother words, εg is replaced with (−1)qεg, where g stands for w(g)g−1.6
To make µ independent from the choices of orderings of u1j and u2j,we need to put g = g if q is even, and g = −g if q is odd. In other

144 elements of surgery theory
7 To related this definition of πnX to thestandard one, let s and x denote the dis-tinguished points of Sn and X respec-tively. We note that there is a unique upto homotopy way to modify f in a neigh-borhood U of s in such a way that f (U)stretches along the thread γ, and s mapsto x.
words, consider the quotient group Λε = Λ/〈g− (−1)q g|g ∈ Λ〉. Thenµ is a well-defined element in Λε.
Exercise 13.5. The immersed sphere S is regularly homotopic to anembedding if and only if µ(S) = 0 in Λε.
13.2 Right and left Modules
A left action of a group π on a set C is a function π × C → C whichassociates with a pair (g, c) an element denoted by g(c). We also saythat the element g takes c to g(c). A left action is required to satisfytwo axioms. First, the identity element 1 in π acts trivially, i.e., 1(c) = cfor every element in C, and, second, the element gh takes any point cto the same point as the element g takes h(c), i.e., g(h(c)) = (gh)(c).Similarly, a right action of a group π on a set C is a function C×π → Cdenoted by (c, g) 7→ (c)g that satisfies the properties that (c)1 = c and((c)g)h = (c)(gh), for all elements c ∈ C and g, h ∈ π. Note that underthe right action the element gh takes c to the same point as the elementh takes (c)g, i.e., the order of actions of g and h under the right actionis different from that under the left action.
When C is an abelian group, we also require that the left action c 7→g(c) (respectively, the right action c 7→ (c)g) of each element g on Cis a homomorphism. In particular, a left action of a group π on anabelian group C is a homomorphism π → Aut(C).
For example, for a pointed topological space X, there is a left actionof the fundamental group π = π1X on the higher homotopy groupsπnX for n > 1. Indeed, the homotopy group πnX can be interpretedas the group of homotopy classes of threaded spheres ( f , γ), i.e., pairsof continuous maps f : Sn → X together with a path γ in X from thebase point of X to the image of the south pole of the sphere Sn.7 Whenthere are two threaded maps ( f , γ) and ( f ′, γ′), their sum is the con-nected sum of the maps f and f ′ along the path γ ∗ γ′. Note that thecylinder of the connected sum passes through a small neighborhoodU of the distinguished point x. We choose the distinguished point onthe connected sum to be near x and choose an arbitrary thread whichentirely lies in U.
The interpretation of homotopy groups πnX with n > 1 in terms ofthreaded spheres may be quite helpful. For example, if π1X is triv-ial, it follows immediately that all threads can be disregarded since

(co)homology with twisted coefficients 145
8 Recall that
Λε = Λ/〈g− (−1)q g|g ∈ Λ〉.
9 To show that the action is well-defined,note that
(γ− (−1)qγ)g
= w(g)[δ− (−1)q δ]
where δ = g−1 ∗ γ ∗ g. In other wordsthe action (γ)h = h ∗ γ ∗ h on Λ definesan action on the factor group Λε.
threads are defined up to homotopy and in a simply connected spaceall choices of threads are equivalent. It is also easy to define a leftaction of π = π1X on πnX in terms of threaded spheres. Indeed, put
g( f , γ) = ( f , g ∗ γ).
In other words, an element g acts on a threaded sphere ( f , γ) by chang-ing its thread to the path which first traverses g and then follows γ.We will need actually to convert the left action of π on πnX into a rightaction:
( f , γ)g = ( f , g−1 ∗ γ).
A left Z[π]-module is an abelian group C together with a homomor-phism π → Aut(C). The action of the group ring Z[π] on the abeliangroup C is defined by (∑ ngg)c 7→ ∑ ngg(c). A right Z[π]-module C isdefined similarly. It is an abelian group with a right action of π.
For example, when π is the fundamental group of a manifold M, theabelian group Λε
8 is a right module over Λ = Z[π]. Under this actionan element h ∈ π sends a point γ ∈ Λε to the point w(h)h−1 ∗ γ ∗h, where w(h) = +1 when h is an orientation preserving loop andw(h) = −1 otherwise.9
13.3 Homology and cohomology with twisted coefficients
Let X be a pointed path-connected CW-complex with fundamentalgroup π1X = π. The distinguished point of X will be denoted by∗. There is a cellular chain complex C∗X, as well as a threaded cellu-lar chain complex C∗(X). In the threaded cellular chain complex thegroup Cn(X) is a free abelian group generated by threaded n-cells inX, where a threaded cell is a cell together with a choice of a homotopyclass of a path from the distinguished point ∗ of X to any point of thecell. We note that the terminal point of the path is not essential sinceany two points in a cell can be joined by an essentially unique path inthe (contractible) cell. In particular, the boundary of a threaded n-cellis a linear combination of threaded (n− 1)-cells.
The threaded cellular chain complex C∗(X) can be identified with thecellular chain complex of the universal covering X of X; thus, the nota-tion. Indeed, recall that the universal covering space X of X consists ofpairs (x, γ) where x is a point in X and γ is a homotopy class of pathsfrom the distinguished point ∗ to x. In particular, every threaded cell

146 elements of surgery theory
10 Recall that g−1 γ is the path whichfirst traverses g−1 and then follows γ.
in X corresponds to a unique cell in X. Similarly, the boundary homo-moprhism in the threaded cellular chain complex of X corresponds tothe boundary homomorphism in the cellular chain complex of X.
Out next observation is that the chain complex C∗(X) is a right Z[π]-module. To describe the corresponding action of π on Cn(X), let Dn
be a cell in X threaded by means of a path γ, and g an element of π.Then (Dn, γ)g = (Dn, g−1 γ).10 Since C∗(X) is a right Z[π]-module,for any left Z[π]-module A, there is a well-defined chain complexC∗(X) ⊗Z[π] A of abelian groups. Its homology group is called thehomology group of X with local coefficients in A, and it is denoted byH∗(X; A).
Example 13.6. Suppose that the module A is the abelian group Z witha trivial action by π. Then the chain complex C∗(X; A) is isomorphicto the chain complex C∗X. On the other hand, if the module A is afree Z[π] on one generator, then
C∗(X; A) = C∗(X)⊗Z[π] Z[π] = C∗(X),
and therefore the chain complex C∗(X; A) is isomorphic to the chaincomplex C∗(X).
Next, we will define the cohomology group of X with local coefficientsin a left Z[π]-module A. To begin with, we observe that the abeliangroups C∗(X) have canonical structures of left Z[π]-modules, namely,with the action g(Dn, γ) = (Dn, g ∗ γ). Since each Ci(X) is a leftZ[π]-module, there are well defined abelian groups C∗(X; A) of ho-momorphisms HomZ[π](C∗(X), A) of left Z[π]-modules. An elementin C∗(X, A) is a function that assigns with each threaded cell (Dn, γ)
an element a in the abelian group A in a way compatible with the leftaction by π. Namely, the function assigns to (Dn, g ∗ γ) the numberg(a). The coboundary homomorphism δn : Cn(X; A) → Cn+1(X, A)
is defined by the standard formula 〈δn f , x〉 = 〈 f , dn+1x〉. It followsthat the abelian groups C∗(X; A) together with the coboundary homo-morphisms form a cochain complex. The corresponding cohomologygroups are called the cohomology groups of X with local coefficients in A.
Example 13.7. If A is the abelian group Z with a trivial action byπ, then C∗(X, A) is isomorphic to the cochain complex C∗(X). If A =
Z[π], and X is a finite CW-complex, then Hk(X; Z[π]) is isomorphic tocompactly supported cohomology group Hk
c (X). To simplify notation,we will write Hk(X) for Hk(X; Z[π]).

(co)homology with twisted coefficients 147
11 To show that the homomorphism iswell-defined, let g be an element in πpreserving the orientation, i.e., w(g) =+1. Then
1⊗ (gx⊗ gy) 7→ gx⊗ gy
= xg−1 ⊗ gy = x⊗ y.
Similarly, if g is an element in π revers-ing the orientation, then
−1⊗ (gx⊗ gy) 7→ −gx⊗ gy
= −xg−1 ⊗ gy = x⊗ y.
13.4 Products in (co)homology with twisted coefficients
We have seen that the free abelian group C∗(X) of threaded cellularchains is a left Z[π]-module, where π = π1X and an element g ∈ π
acts on C∗(X) by taking a cell Dn threaded by γ to the same cell Dn
threaded by g ∗ γ. The abelian group C∗(X) ⊗ C∗(X) is also a leftZ[π]-module with the action defined by g(x⊗ y) = (gx⊗ gy) for anygenerator x⊗ y of the tensor product of groups, and any element g inthe fundamental group π.
Suppose now that the CW complex X is a manifold M with funda-mental group π1M = π. Let Zω denote the right Z[π]-module whichconsists of the abelian group Z as well as the left action by π given byn · g = n if g is orientation preserving and n · g = −n otherwise. TheZ[π]-module Zω is called the orientation sheaf over the manifold M.For a general CW-complex X with a homomorphism ω : π → Aut(Z),the right Z[π]-module Zω is defined to be the abelian group Z withthe action of π on Z given by ω, i.e., with the action n · g = w(g)n.
An element in the abelian group Zω ⊗Z[π] CnX is a linear combinationwith integral coefficients of elements of the form 1⊗ x, where x is acell Dn threaded by a homotopy class γ of paths subject to the iden-tifications 1⊗ gx = w(g)1⊗ x. We can similarly interpret generatorsof the abelian group Zω ⊗Z[π] C∗X ⊗ C∗X as triples 1 ⊗ x ⊗ y withidentifications 1⊗ gx⊗ gy = ±w(g)1⊗ x⊗ y.
The diagonal map X → X × X is not cellular in general, but it canbe modified by a homotopy to a cellular map ∆. In induces a ho-momorphism of abelian groups C∗X → C∗X ⊗ C∗X, and takes anygenerator x to a Z-linear combination ∑ x′ ⊗ x′′. In fact, it is a map ofleft Z[π]-modules as it takes gx to ∑ gx′⊗ gx′′, and therefore it definesa homomorphism of abelian groups
∆∗ : Zω ⊗Z[π] C∗X −→ Zω ⊗Z[π] (C∗X⊗ C∗X).
Recall that C∗X also has a structure of a right-Z[π] module. There isan isomorphism of abelian groups
Zω ⊗Z[π] (C∗X⊗ C∗X) −→ C∗X⊗Z[π] C∗X.
which takes 1⊗ x ⊗ y to x ⊗ y.11 Thus, the homomorphism ∆∗ takesan element 1⊗ x to ∑ x′i ⊗ x′′i where x′i is an element in the left Z[π]-module C∗X, while x′′i is an element in the right Z[π]-module C∗X.
We are now in position to define the cap product. Namely, let x be an

148 elements of surgery theory
12 If ∑ w(g)x′i g−1 ⊗ g(x)x′′i is another
representative of ∆∗(x), then the result-ing chain is
∑ w(g)y(x′i g−1)gx′′i = ∑ w(g)y(gx′i)gx′′i
= ∑ w(g)gy(x′i)gx′′i
= ∑ w(g)w(g)g−1y(xi)′gx′′i
= ∑ y(x′i)x′′i .
13 Another version of the Poincaré dual-ity theorem asserts that the homomor-phisms
[X]∩ : Hi(M; Zω)→ Hm−i M,
[X]∩ : Hi M→ Hm−i(M; Zω)
are isomorphisms.
element in Cm(X; Zω) = Cm(X)⊗Z[π] Zω. Then there is a a map
x∩ : CiX 7→ Cm−iX
defined by y 7→ ∑ y(x′i)x′′i .12 Here we use the involution map on Z[π]
defined by ∑ ngg 7→ ∑ ngw(g)g−1, where w(g) = 1 when g is orienta-tion preserving and w(g) = −1 otherwise. The map x∩ in (co)chainsdepends on the choice of the cellular diagonal map ∆. However, whenx is a homology class, in (co)homology the cap product is a well-defined homomorphism
x∩ : HiX −→ Hm−iX.
It turns out that if M is a closed connected manifold of dimension m,then Hm(M; Zω) is isomorphic to Z. Let [X] be a generator of thisgroup. We will use the following theorem without proof.13
Theorem 13.8 (The Poincare duality). There is a Z[π]-isomorphism
[X]∩ : Hi M→ Hm−i M.
We note that for every finitely generated free Z[π]-module A = Z[π]⊕· · · ⊕Z[π] we have Hi(M; A) = Hi M⊕ · · · ⊕ Hi M. A similar equalityis true for cohomology groups. Thus, there is a Poincare duality iso-morphism Hi(M; A) ≈ Hm−i(M; A) for every finitely generated freeZ[π]-module A.
Corollary 13.9. Suppose that for every projective Z[π]-module P the homol-ogy groups Hi(M; P) are trivial for i < q. Then the groups Hm−i(M; P) aretrivial for i < q.
Proof. Indeed, since P is projective, it is a summand of a free Z[π]-module P⊕Q, while Hm−i(M; P) is a summand of the trivial group
Hm−i(M; P)⊕ Hm−i(M; Q) = Hm−i(M; P⊕Q) = Hi(M; P⊕Q) = 0,
since the group Hi(M; P ⊕ Q) is the direct sum of the trivial groupsHi(M; P) and Hi(M; Q).
13.5 Poincaré complexes
Let X be a finite CW-complex, equipped with a homomorphism ω : π →Aut(Z) on its fundamental group π. The homomorphism ω defines

(co)homology with twisted coefficients 149
14 In fact, by Theorem 14.1 below, wemay assume that the map f : M→ X is q-connected, where m = 2q or m = 2q + 1.In particular, we may assume that f in-duces an isomorphism of fundamentalgroups of M and X.
an action of the group ring Z[π] on Z by g(n) = nω(g), and thereforeturns the abelian group Z into a Z[π]-module, which we denote byZω. In practice, we will consider a CW-complex X with a vector bun-dle νX . The homomorphism ω is the orientation sheaf associated withνX . Namely, ω(g) is the identity homomorphism when g is a homo-topy class of orientation preserving loops, while ω(g) is given by themultiplication by −1 when g is an orientation reversing class.
We say that X is a (finite) Poincaré complex of dimension m if there isa class [X] ∈ Hm(X; Zω) such that the homomorphisms [X]∩ : HiX →Hm−iX are isomorphisms for all i. We note that the homomorphismω = ωX as well as the homology class [X] are parts of the Poincarécomplex structure on X.
Let f : M→ X be a map of Poincaré complexes. It defines a homomor-phism f ∗wX : π1M→ Aut(Z) by taking the homotopy class γ of a loopto ωX( f∗γ). If f ∗wX = wY, then the map f defines homomorphisms of(co)homology with coefficients in ZωX and ZωY . We say that the mapf is of degree one, if f∗[M] = [X].
Given a normal map f of degree 1 of a connected closed manifoldM of dimension m ≥ 5 into a Poincare complex X, we aim to deter-mine under what conditions the map f is cobordant to a homotopyequivalence. Suppose that the map f induces an isomorphism of fun-damental groups of M and X.14 Furthermore, since f is of degree 1, bydefinition, it pulls the twisted coefficients ZωX back to ZωM . We willwrite Zω for both. Then the map f not only defines homomorphisms
f∗ : H∗M→ H∗X, f ∗ : H∗X → H∗M,
but also homomorphism
f ! : H∗M→ H∗X, f! : H∗X → H∗M,
where for example f ! is defined by first converting a cohomology classU to a homology class u = [M] ∩ U, then pushing it to a class v =
f∗u, and finally converting it back to a cohomology class V such that[X] ∩V = v. It follows that f∗ f! = id and f ! f ∗ = id, when f is ofdegree 1, see Lemma 11.9. In particular,
H∗M = H∗X⊕ K∗M, H∗M = H∗X⊕ K∗M,
where K∗M is ker f∗, and K∗M = ker f !. Furthermore, in view ofPoincaré dualities on M and X, we deduce the existence of Poincaréduality isomorphisms: [M]∩ : Ki M → Km−i M. Similarly, for a normalmap of pairs (W, M) → (Y, X), of degree 1 there are well-definedgroups K∗(W, M) and K∗(W, M).

150 elements of surgery theory
13.6 Homological algebra
Let (C, d) be a chain complex of finitely generated projective Λ-modulessuch that the modules Ci are trivial for i 6= m, m + 1, ..., n, i.e., it is ofthe form
0→ Cndn−→ Cn−1
dn−1−−→ · · · dm+2−−→ Cm+1dm+1−−→ Cm → 0.
We say that the chain complex (C, d) is split exact if each module Ci isisomorphic to a direct sum Bi ⊕ Bi−1 of modules such that di is trivialon Bi and takes Bi−1 by identity to the factor Bi−1 in Ci−1. In this caseBi−1 is the module of boundaries di(Bi−1) in Ci−1.
Lemma 13.10. Suppose that the homology groups of (C, d) are trivial. Then(C, d) is split exact.
Proof. Since Bm = Cm is projective, there is a homomorphism Γm : Bm →Cm+1 left inverse to dm+1, i.e., a homomorphism such that dm+1 Γm =
id. Therefore, the projective module Cm+1 is the direct sum of projec-tive modules Bm+1 ⊕ Bm where the summands Bm+1 and Bm are iden-tified with the images of dm+2 and Γm respectively. Furthermore, thereis an exact sequence of projective modules
0→ Cndn−→ Cn−1
dn−1−−→ · · · dm+3−−→ Cm+2dm+2−−→ Bm+1 → 0.
Therefore the argument can be repeated, and Lemma 13.10 follows byinduction.
Remark 13.11. Note that the conclusion of Lemma 13.10 still holds evenif the module Cn is not assumed to be projective. In fact, in this caseLemma 13.10 implies that Cn = Bn−1 is projective.
Lemma 13.12. Suppose that for all choices of coefficients, the cohomologygroups of (C, d) are trivial. Then (C, d) is split exact.
Proof. Choosing the coefficient module to be Cn, we deduce that thesequence
0←− HomΛ(Cn, Cn)d∗n←− HomΛ(Cn−1, Cn)←− · · ·
is exact. In particular, there is a homomorphism f : Cn−1 → Cn suchthat d∗n( f ) = id, i.e., f dn = id. Therefore, Cn−1 ≈ Bn−1 ⊕ Bn−2, andthere is an exact sequence 0→ Bn−2 → Cn−2 → Cn−3 → · · · . Thus, theargument can be iterated, and Lemma 13.12 follows by induction.

(co)homology with twisted coefficients 151
15 Indeed, let f : Cq → Bq be a left inverseof dq, i.e., a homomorphism such thatf dq = id. Since the image of dq is in Zq,we have f |Zq dq = id, where f |Zq : Zq →Bq is the restriction of f . In other words,Bq is a direct summand of Zq, which im-plies that Zq = Bq ⊕ Hq. To summarize,Cq = Zq ⊕ Zq−1 = Bq ⊕ Hq ⊕ Zq−1.
16 The following is Lemma 2.3 in Wall.
Theorem 13.13. Suppose that HiC = 0 for i < q, and for all choices ofprojective coefficients H jC = 0 for j > q. Then HqC is a finitely generatedstably free Λ-module, and HqC = (HqC)∗.
Proof. By Remark 13.11, the module Zq−1 = Bq−1 is projective. There-fore the exact sequence 0→ Ker dq → Cq → Im dq → 0 where Ker dq =
Zq and Im dq = Bq−1 is split exact. Therefore, Cq = Zq ⊕ Zq−1. Bythe argument in the proof of Lemma 13.12, we deduce that there is asequence
0→ Bqdq−→ Cq → Cq−1 → · · ·
whose cohomology groups are trivial for all choices of coefficients.Consequently, by the same argument, the group Cq is a direct sum ofBq and some module B⊥q . It follows that Cq = Bq ⊕ Hq ⊕ Zq−1.15 If weremove Hq from Cq in the chain complex C, then we obtain an exactsequence
· · · → Cq+2 → Cq+1 → Bq ⊕ Zq−1 → Cq−1 → Cq−2 → · · · .
By Lemma 13.10, this sequence is split exact. In particular, we have
Bq ⊕ Zq−1 ⊕⊕ev 6=0
Cq+ev =⊕
Cn+odd
where ev and odd range over all even and odd integers respectively. Byadding Hq to both sides, we obtain⊕
ev 6=0
Cq+ev = Hq ⊕⊕
Cn+odd,
which implies that Hq is a finitely generated stably free Λ-module.
Finally, let us show that HqC = (HqC)∗. We have seen that C is splitexact at all terms except at Cq:
→ Bq+1 ⊕ Bq → Bq ⊕ Hq ⊕ Bq−1 → Bq−1 ⊕ Bq−2 → · · ·
The same is true for the complex Hom(C, Z[π]); hence the claim.
13.7 The kernels KqM and KqM
We will see that every normal map f : M → X of degree 1 can beturned by surgery into a q-connected map. We will next formulate thisfact in terms of kernels Ki M. We say that a module is stably free if itsdirect sum with some free module is free.16

152 elements of surgery theory
17 Indeed, we have πi M ≈ πi M andπiX ≈ πiX for i > 1.
18 The splitting is constructed in theproof of Lemma 13.10 except for thesplitting of Cq. To split Cq we note thatin
0→ Ker dq → Cq → Im dq → 0
the module Ker dq is the module Zq ofcycles, while Im dq is the module Bq−1 ofboundaries. This sequence splits sinceBq−1 is projective; it is a summand of afree module Cq = Bq−1 ⊕ Bq−2.
19 Indeed, if P ⊕ Q is free, thenHm−i(C; P) is a direct summand of thezero module
Hm−i(C; P)⊕Hm−i(C; Q) = Hi(C; P⊕Q).
20 Without loss of generality we may as-sume that f is an inclusion. Then a mapf is q-connected if all groups πi(X, M)are trivial for i ≤ q. On the other hand,for i > 1, we have Ki = πi(X, M).
Theorem 13.14. Let f : M → X be a q-connected degree one map from aclosed connected manifold of dimension m to a finite Poincaré complex forq ≥ 2. If m = 2q, then the kernels Ki M are trivial for i 6= q, and Kq M =
πq+1( f ) is a finitely generated stably free Z[π]-module. If m = 2q + 1, thenthe kernels Ki M are trivial for i 6= q, q + 1, and Kq M ≈ πq+1( f ).
Proof. We may assume that the map f is an embedding of a CW-complex into a CW-complex. Let X → X be a universal covering.Since q ≥ 2, it restricts to a universal covering M → M over M. Theinclusion M → X is still a q-connected map.17 Consequently, the ker-nel Ki M = Hi+1(X, M) is trivial for i < q, and
Kq M = Hq+1(X, M) ≈ πq+1(X, M) ≈ πq+1(X, M) = πq+1( f ).
by the Relative Hurewicz Theorem. Let now C denote the chain com-plex of Z[π]-modules of the pair (X, M). Its homology Hi(C) = Ki Mare trivial for i < q. Therefore the chain complex C is of the form18
→ Cq+1 → Zq ⊕ Bq−1 → Bq−1 ⊕ Bq−2 → Bq−2 ⊕ Bq−3 → · · ·
Consequently, the homology groups Hi(C; P) are trivial for i < q andany coefficient Z[π]-module P. By the Poincaré duality, Hm−i(C; P)is trivial for any projective Z[π]-module P.19 If m = 2q, then m − iranges over all j > q as i ranges over integers < q. Therefore, by The-orem 13.13, the module Kq M is a finitely generated stably free Z[π]-module. If m = 2q, we deduce that Ki M may be non-trivial only fori = q and i = q + 1.
Thus, every normal map f : M → K of degree 1 is cobordant to a mapwith trivial kernels Ki M = 0 for i ≤ q− 1.20 On the other hand, themap f is a homotopy equivalence if and only if it is (q + 1)-connected,or, equivalently Ki = 0 for i ≤ q. Thus, we need to study when theZ[π]-module K = Kq M can be eliminated by surgery.

Figure 14.1: Dennis Sullivan (1941–)
Figure 14.2: Charles Terence Clegg Wall(1936–)
14
Surgery on non-simply connected manifolds
14.1 Surgery below the middle range
Let M ⊂ Rm+k be a manifold of dimension m, and X a finite CW-complex equipped with a vector bundle ν. We say that f : M → X is anormal map if it is covered by a fiberwise isomorphism f : T⊥M→ ν. Inother words, for each point x ∈ M, there is a chosen isomorphism ofthe perpendicular space T⊥x M and the space ν f (x), and, furthermore,the chosen isomorphisms change continuously as x changes in M.
Without loss of generality we may assume that M has a chosen CW-structure, and the map f is an embedding. In fact, we may replacethe CW-complex X with the mapping cylinder of f , and therefore wemay assume that the CW-complex X is obtained from M × [0, ε] byattaching finitely many cells.
A normal cobordism of normal maps fi : Mi → X, with i = 0, 1, is acobordism W ⊂ Rm+k × [0, 1] of the manifolds M0 and M1 togetherwith a normal map W → X extending the normal map f .
Theorem 14.1. Every normal map f : M → X of a closed connected man-ifold of dimension m ≥ 2q to a connected CW-complex is cobordant to aq-connected normal map.
Proof. We may assume that f is an embedding. Then the CW-complexX is obtained from the manifold M by attaching finitely many cells.Without loss we may assume that the cells of dimension > q are at-tached after all cells of dimension ≤ q are attached. Let k be the num-

154 elements of surgery theory
1 We have seen before that the normalbundle of such a sphere in M is necessar-ily trivial. Indeed, the normal bundle ofan embedded sphere S ⊂ M of dimen-sion i − 1 in Rm+k consists of the sumof the perpendicular bundle T⊥M overS and the perpendicular bundle νS of Sin M. Since the vector bundle T⊥M ≈ νover S extends over Di , it is trivial, i.e., itcan be identified with εk . Thus we have
εm+k−i+1 = νS ⊕ εk
which implies that νS is trivial when thedimension of νS is strictly greater thanthe dimension of S.
2 There is a long exact sequence of homo-topy groups
πqXk → πqX → 0→ πq−1Xk
since πi(X, Xk) = 0 for i ≤ q.
3 We recall that a threaded map Sq → Mis a map together with a curve w fromthe basepoint of M to the image of thebasepoint of Sq.
ber of cells in X \M of dimension ≤ q.
Let Xs denote the CW-complex obtained from M× [0, ε] by attachingthe first s cells so that X0 coincides with W0 = M × [0, ε]. The firstcell Di is attached along an attaching sphere of dimension ≤ q− 1 tothe manifold M× ε of dimension ≥ 2q,1 and therefore, the attachedcell can be thickened to a handle Di × Dj where j = m − i + 1. Thethickening of the cell turns X1 into a cobordism W1 from M to M1,while the compression Di × Dj → Di defines a deformation retractionW1 → X1. The second cell X2 \ X1 is attached along an attachingsphere in X1 ⊂ W1. We may modify it by homotopy to obtain anattaching sphere in M1 ⊂ ∂W1, and then thicken the second cell to ahandle, and turn X2 into a cobordism W2 between M and M2.
Continuing by induction, we construct a sequence of manifolds Wi
with i ≤ k together with deformation retractions Wi ≈ Xi such thateach Wi for i ≥ 1 is obtained from Wi−1 by attaching a single handle. Inparticular, the composition of the homotopy equivalence Wi → Xi withthe inclusion Xi ⊂ X is a normal cobordism of f to a map fi : Mi → X.
Since the space X is obtained from Xk by attaching cells of dimension≥ q, the map Wk ≈ Xk → X is q-connected.2 On the other hand,the cobordism Wk is obtained from Mk by attaching handles of highindices m− i + 1 where i ≤ q. Therefore the relative homotopy groupsπi(Wk, Mk) are trivial for j ≤ m − q, which means that the inclusionMk → Wk is also a q-connected map as m− q ≥ q. As a compositionof q-connected maps, the map Mk →Wk → X is also q-connected.
14.2 Surgery on maps of manifolds of even dimension
14.2.1 Wall representatives
Let f : M→ X be a normal map of a manifold M ⊂ Rm+k of dimensionm ≥ 5 into a Poincaré complex X of dimension m, with a fiberwise iso-morphism T⊥M → ν covering the map f . Suppose that f is of degree1. Then f is normally cobordant to a q-connected map where m = 2qor m = 2q + 1. By an appropriate version of the Poincare duality, themap f is a homotopy equivalence if and only if it is q + 1 connected,i.e., K = πq+1(X, M) is zero. An element in K is represented by athreaded immersion i : Sq → M together with an extension of f i to amap Dq+1 → X.3 In fact, by the Whitney trick we may assume that the

surgery on non-simply connected manifolds 155
threaded immersion i is a threaded embedding. We note then that nearthe embedded sphere S′ = i(S), the manifold M is framed. Indeed,since the disc Dq+1 is contractible, the pull back of ν over Dq+1 has aunique up to homotopy frame. In view of the fiberwise isomorphismT⊥M ≈ ν over S′, the frame over ∂Dq+1 = S′ defines a distinguishedframe τ1, ..., τk of M over S′ which can be extended to a neighborhoodof S′.
We will next define a Wall representative of the homotopy class i. Infact, the construction of a Wall representative is the same as in thecase of a framed manifold M except that in general the manifold Mis framed only near the sphere S′. Such a frame is sufficient as theconstruction of the Wall representative takes place in a neighborhoodof S′.
We will briefly review the construction.
The sphere S′ bounds a unique up to isotopy disc D′ in Rm+k × [0, 1]where the space Rm+k containing the manifold M ⊃ S′ is identifiedwith the horizontal slice Rm+k × 0. Since the disc D′ is contractible,there is a unique up to isotopy orthonormal frame v = vi over D′.By the Multicompression Theorem there is an ambient isotopy F whichslightly perturbs S′ in Rm+k and brings the vector fields v1, ..., vk tothe vector fields τ1, ..., τk over S′. The ambient isotopy F extends toan ambient isotopy of Rm+k × [0, 1] and modifies D′ together with itsframe appropriately. The sphere S′ may not be in M anymore, but itis still in a tubular neighborhood of M. Therefore it can be projectedby a regular homotopy to a sphere S ⊂ M. The regular homotopy ofS′ extends to a regular homotopy of D′ and its frame, and results in aframed disc D in Rm+k × [0, 1] bounding S.
We note that S is a threaded sphere, representing the homotopy class[i]. It is equipped with a frame v1 = τ1, ..., vk = τk, vk+1, ..., vm−q+k inRm+k which extends to a frame vi over D in Rm+k × [0, 1]. We saythat S is a Wall representative of the homotopy class [i]. Furthermore,we say that a representative (g, g) of x ∈ K is a Wall representativeif g(Sk) is a Wall representative. Similarly, we say that (g, g) is anembedded Wall representative if it is a Wall representative and g is anembedding.
Theorem 14.2. Suppose that m ≥ 2q and m ≥ 5. Let x be an element in K.If x admits an embedded Wall representative, then any embedded representa-tive S of x is a Wall representative.

156 elements of surgery theory
4 We note that since g is an immersion,there may exist points u and v in Sq ×[0, 1] such that g(u) = g(v). In this case,there are two possibly different framesat g(u) = g(v) corresponding to u andv. For this reason, the frame τ1, ..., τk isa frame not over S, but a frame along animmersion.
Figure 14.3: The immersed disc S in Mas well as the disc D.
Proof. The proof is similar to the proof of Theorem 5.6. Namely, choosean embedded Wall representative Sx of x in M. Since Sx and S arehomotopic, by the Whitney strong immersion theorem there is an im-mersion g : Sq × [0, 1] → M to the cylinder M = M × [0, 1] such thatover Sq × t the immersion g agrees with the inclusion of Sx and Swhen t ∈ [0, ε] and t ∈ [1− ε, 1] respectively. The image of g is animmersed cylinder S. In Rm+k × [0, 1]×R there is an immersed discD = Dq+1 × [0, 1] such that Dq+1 × 1 is the core Dx of a framedsurgery along the Wall representative Sx, the disc Dq+1 × 1 is anembedded disc in Rm+k × 1 ×R, and ∂Dq+1 × [0, 1] = S, see Fig-ure 14.3.
As in the construction of the Wall representative, there is a perpen-dicular frame τ1, ..., τk of M over Sx. Since Sq × 0 is a deformationretract of Sq × [0, 1], the frame τ1, ..., τk can be extended over the im-mersion g. In other words, there is a function which associates witheach u ∈ Sq × [0, 1] a frame of T⊥M at the point g(u).4
The core Dλ of the surgery is equipped with perpendicular vectorfields v1, ..., vm−q+k over D such that the vector fields vi coincide withτi for i ≤ k over Sx. As above, we may extend the vector fields vi|Sx
along the immersion g in such a way that vi = τi for i ≤ k. Next, sinceS ∪ Dλ is a deformation retract of D, we may extend the vector fieldsvi over D. It remains to observe that the disc Dq+1×1 together withvector fields vi over it is a base of framed surgery along S.
14.2.2 The intersection pairing λ and self-intersection form µ
Let f : M → X be a q-connected normal map of degree one of a man-ifold of dimension m = 2q. We may assume that that f is an inclu-sion, in which case the group K = Kq M can be identified with thegroup πq+1(X, M). In particular its elements are represented by pairsx = (g, g) of immersions g : Sq → M and extensions g : Dq+1 → X of g.We define the intersection pairing
λ : K× K −→ Λ
by λ(x, y) = λ(g(Sq), h(Sq)) where x = (g, g) and y = (h, h) any twoelements in K. We note that by Exercise 13.3, the intersection pairingλ is well-defined.
Exercise 14.3. Show that λ is non-degenerate, i.e., its adjoint map K →K∗ is an isomorphism.

surgery on non-simply connected manifolds 157
Next, let us define the invariant µ. Recall that on the group ringΛ = Z[π], where π = π1M, there is an involution g 7→ g whichtakes g to w(g)g−1, where w(g) = 1 if g is orientation preservingand w(g) = −1 otherwise. Let Λε denote the quotient group of Λ by〈g− (−1)q g|g ∈ Λ〉. For an immersion S # M of a sphere we havedefined the algebraic number µ(S) of intersection points with coeffi-cients in Λε. The invariant µ : K → Λε associates with an element [i]the algebraic number µ(S) of intersection points with coefficients inΛε of the Wall representative S of i.
As in the case of framed manifolds, we deduce that the invariant µ iswell-defined, and µ(x) = 0 for x ∈ K if and only if there is a surgeryalong a representative of x. Furthermore, if µ(x) = 0, then any embed-ded representative of x is a Wall representative provided that m ≥ 2qand m ≥ 5 by Theorem 14.2.
To begin with let us recall that an element in K = πq+1(X, M) is repre-sented by a threaded immersion i : Sq → M together with an extensioni : Dq+1 → X. Explicitly, the addition of elements (i, i) and (i′, i′) canbe described as follows. The concatenation w′ ∗ w−1 obtained fromthreads w and w′ of the threaded immersions i and i′ respectively is apath from the distinguished point i(Sq) of the first immersed sphere tothe distinguished point i′(Sq) of the second immersed sphere. Take aconnected sum of the two immersed spheres along the path w′ ∗ w−1,and choose a short thread for the newly obtained immersed sphere;note that a connected sum is obtained by attaching to the two im-mersed spheres a cylinder passing near the distinguished point of M,and therefore there is a short path from the distinguished point of Mto a point on the cylinder. The new threaded sphere is bounded inX by the boundary connected sum of the discs i(Dq+1) and i′(Dq+1)
where the connected sum is taken along w′ ∗ w−1.
There is also an action of Λ on K; if S is an immersed sphere equippedwith a curve w from the basepoint of M to the basepoint of S and g acurve representing an element in π1M, then Sg is the same immersedsphere but equipped with the curve g−1 ∗ w. By Lemma ?? the mod-ule K is a finitely generated stably free Λ-module. There is also aninvolution Λ → Λ defined by g 7→ ω(g)g−1 where ω(g) = 1 if g isorientation preserving, and ω(g) = −1 otherwise.
Theorem 14.4. The intersection pairing λ and the self-intersection form µ
satisfyλ(S1, S2) = ελ(S2, S1),
λ(S, S1g1 + S2g2) = λ(S, S1)g1 + λ(S, S2)g2.

158 elements of surgery theory
5 In literature, given a ring A with invo-lution, a pairing λ on an A-module A issaid to be sesquilinear if the second prop-erty of Theorem 14.4 holds, ε-symmetric,if the first property holds, and µ is saidto be an ε-quadratic form, if the lastthree properties hold. Finally, K is non-singular, if the map K → K∗ adjoint to λis an isomorphism of A-modules.
6 For example, let L be the free module Λwith generator e. Then L∗ is a free mod-ule with generator e∗ such that e∗(e) = 1,where 1 is the generator of Z[π]. Thematrix of the form λ is given by[
0 1ε 0
].
The form µ is defined so that µ(e) =µ(e∗) = 0. This implies µ(e + e∗) = 1.
7
Exercise 14.8. Let f : M → X be a q-connected normal map of a manifoldof dimension m = 2q. Suppose thatf ′ is a normal map obtained from fby a normal spherical surgery along asphere Sq−1 ⊂ M. Show that K( f ′) =K( f ) ⊕ Hq, where Hq = (Λ ⊕ Λ, λ, µ)is the ε-quadratic form on the free Λ-module with generators x and y suchthat λ(x, y) = 1, µ(x) = µ(y) = 0.
8 Hint for Exercise 14.10. Show that−K = (K,−λ,−µ). More precisely,show that the ε-quadratic form
(K, λ, µ)⊕ (K,−λ,−µ)
is isomorphic to the hyperbolic formHε(K). Let us construct the map
K⊕ K 7→ K⊕ K.
which takes (x, y) to (x − ελ(y, ), x +λ(, y)).
µ(S1 + S2) = µ(S1) + µ(S2) + λ(S1, S2),
µ(Sg) = gµ(S)g,
λ(S, S) = µ(S) + εµ(S).
where ε = (−1)q.
Exercise 14.5. Prove Theorem 14.4.
In other words K = (K, λ, µ) is a non-degenerate ε-quadratic form overΛ, ε = (−1)k,5 see Exercise 14.3.
Definition 14.6. An ε-quadratic form over Λ is a pairing λ : K × K →Λ and a map µ : K → Λε on a projective Λ-module K that satisfythe equalities of Theorem 14.4. We say that an ε-quadratic form isnon-degenerate if λ is non-degenerate, i.e., the associated map K →HomΛ(K, Λ) defined by x 7→ λ(x,−) is an isomorphism.
There is an important example of an ε-quadratic form over Λ. LetL be a finitely generated projective Λ-module, and K = L⊕ L∗ whereL∗ = HomΛ(L, Λ). Put µ(x, f ) = f (x), and λ(x, f ; y, g) = f (y) + εg(x).We say that Hε = (K, λ, µ) is a hyperbolic ε-quadratic form.6
There is a semigroup structure on the set of ε-quadratic forms; namely,
K1 ⊕K2 = (K1 + K2, λ1 ⊕ λ2, µ1 ⊕ µ2).
Example 14.7. Let f : M → X be a normal q-connected map of degreeone of a closed manifold of dimension m = 2q. A surgery along atrivial element in πq+1( f ) replaces the manifold M with a manifoldM#(Sq× Sq). Consequently, the group Kq M is replaced with the groupKq M⊕ (Zπ ⊕Zπ), while the ε-quadratic form K is replaced with itsdirect sum K⊕Hε.
7
Definition 14.9. The abelian semigroup L2q(Λ) is the quotient semi-group of non-degenerate ε-quadratic forms on finitely generated freeΛ-modules under the equivalence relation generated by K ' K⊕Hε.
Exercise 14.10. Show that L2q(Λ) is a group.8

surgery on non-simply connected manifolds 159
9 In other words, we may choose rep-resenting spheres Sa1 , ..., Sak , Sb, Sc to-gether with extending maps D → Xsuch that Sb and Sc are embeddedspheres disjoint from Sai , there is aunique intersection point in Sb ∩ Sc, andthe path from the distinguished pointin M through the distinguished pointin Sb, the intersection point, the distin-guished point in Sc back to the distin-guished point in M is null-homotopic.
14.2.3 Effect of surgery on homotopy groups
Suppose that K is a free Λ-module with a basis a1, ..., ak, b, c such thatwith respect to the intersection form λ, the class b is orthogonal to allai and b, the class c is orthogonal to all ai and c, and λ(b, c) = 1. Since2q ≥ 6, we may choose representatives of the classes ai, b and c, so thatthe geometric numbers of intersections of the representatives agreeswith the algebraic numbers.9 Suppose that µ(b) = 0. Then there is anormal surgery along b which results in a normal q-connected map ofa manifold M′ with kernel K′ and maps λ′ and µ′.
Lemma 14.11. The group K is a free Λ-submodule of K′ generated by a1, ..., ak.The maps λ′ and µ′ are restrictions of λ and µ.
Proof. The manifold M′ is obtained from M by removing a torus hq,and then attaching a torus h′q to M0 = M \ hq. As in Lemma 6.7,consider the long exact sequence of Z[π]-modules
Hq+1(M, M0)∂−→ Kq M0
i∗−→ Kq Mj∗−→ Hq(M, M0)
The source of the homomorphism ∂ is a trivial module, while the ho-momorphism j∗ is a surjective homomorphism onto a module isomor-phic to Z[π] which takes the class c to a generator. Thus Kq M0 is afree Z[π]-module generated by a1, ..., ak, b. As in Lemma 6.8, con-sider the long exact sequence
Hq+1(M′, M0)∂−→ Kq M0 → Kq M′ → 0.
The homomorphism ∂ takes the generator of Hq+1(M′, M0) ≈ Z[π]
to b, and therefore, the module K′ = Kq M′ is a free Z[π]-modulegenerated by a1, ..., ak.
14.2.4 The main theorem
Every normal map f on a manifold of dimension m = 2q is normallycobordant to a q-connected map f ′. Define K( f ) = K( f ′).
Theorem 14.12. The invariant K( f ) is well-defined, and it is an invariant ofa normal cobordism. In particular, if f is normally cobordant to a homotopyequivalence, then K( f ) = 0.
Proof. It suffices to show that if W → X × [0, 1] is a normal cobor-dism between q-connected maps f : M → X and f ′ : M → X, then

160 elements of surgery theory
10 Suppose that a handle of index q is at-tached along an attaching sphere S of di-mension q − 1. Since the cobordism isnormal, the image of the sphere S in Xis null-homotopic. On the other hand,since f is q-connected, it follows that S isnull-homotopic in M. Thus all handlesof index q are attached along spheresthat are null-homotopic. A bit care isnecessary. The sphere has to be nullisotopic.
K( f ) = K( f ′). By performing surgery below the middle range, wemay assume that W is obtained from M× [0, ε] by attaching handles ofindeces q and q + 1. The cobordism W is a composition of a cobordismW ′ on M which consists of trivially attached handles of index q,10 andthe inverse W ′ to a cobordism on M′ which also consists of triviallyattached handles of index q. By Example ??, the element K( f ) doesnot change under the corresponding surgery.
Theorem 14.13. Let f : M → X be a normal map of degree one of a mani-fold of dimension m = 2q. Then K( f ) ∈ L2q(Λ) is a well-defined completeobstruction to the existence of a normal cobordism of f to a homotopy equiv-alence.
Sketch. We may assume that f is q-connected. If K( f ) is zero in L2q(Λ),then after performing finitely many spherical surgeries along spheresof dimension q − 1, we may assume that K( f ) = Hk
q for some finitek. A spherical surgery along a basis vector of K eliminates a factor ofHk
q; indeed, the inverse spherical surgery is perfomed along a sphereof dimension q − 1 in q-connected manifold and therefore results inaddition of a factor of Hk
q. Thus, in finitely many steps, we obtainK = 0.
14.3 Surgery on maps of manifolds of odd dimension
14.3.1 Heegaard splittings
Let f : M → X be a normal q-connected map of degree one from aclosed manifold of dimension m = 2q + 1 such that the groups Ki Mare non-trivial only in degrees q and q + 1. Let U be an embedded ballwith k handles of degree q in M, and M0 the closure of the complementto U in M. Suppose that X is obtained from a Poincaré pair (X, S2q) byattaching a cell B = B2q+1 along an embedded “boundary" sphere S2q.We say that the decompositions M = M0 ∪U and X = X ∪ B form adegree one splitting if f (M0) ⊂ X0, f (U) ⊂ B and the maps
f | : ∂U −→ S2q,
f | : (U, ∂U) −→ (B2q+1, S2q),
f | : (M, M0) −→ (X, X0)
are degree one maps. We note that the k spheres Sα of dimension q inU corresponding to the k handles of U are send to the contractible set

surgery on non-simply connected manifolds 161
B in X, and therefore the inclusions Sα ⊂ M together with extensionsDq+1 → B2q+1 of f |Sα represent elements xα in Kq M. We say that thedegree one splitting is associated with elements xα. A degree onesplitting is a Heegaard splitting if xα is a set of generators of Kq(M).
In the rest of the section we will construct Heegaard splittings.
Choose a set of generators of the Z[π]-module Kq M, and representeach generator by an embedded sphere Sα in M, and a map of a discDq+1 → X extending f |Sα. Choose a thickening Sα × Dq+1 of eachsphere Sα, and connect the chosen tori by thin tubes to obtain a copyof a ball U = #bSα × Dq+1 with, say, k handles in M. The closure ofthe complement will be denoted by M0. We may modify the map f byhomotopy so that f |U is a constant map onto the center x0 of the cellB2q+1.
If f |M0 is transverse to x0, then the inverse image of x0 has only finitelymany points x in M0. For each x we may modify f so that f takes adisc neighborhood of x to x0. Then we may perform a trivial surgeryof index (q + 1)-along an attaching sphere in the disc neighborhood ofx. This results in a map f ′ of M′ = M#Sq × Sq+1, with meridian Sx ofdimension q. The sphere Sx ∈ M′ together with the constant extensionDq+1 → X of the map f |Sx represents a new generator. By performingsuch a surgery for each inverse image x of x0 in M0, we may assumethat f takes M0 to X \ x0.
Since any two maps to B are homotopic, we may modify the map fby homotopy in a neighborhood of U so that f |∂U is a degree onemap to ∂B, and f still takes U to B. We claim that f |U is also a map(U, ∂U)→ (B2q+1, S2q) of degree 1. Indeed, there is a diagram of shortexact sequence
0 −−−−→ H2q+1(U, ∂U) −−−−→ H2q∂U −−−−→ H2qU −−−−→ 0y y y y y0 −−−−→ H2q+1(B, ∂B) −−−−→ H2q∂B −−−−→ H2q B −−−−→ 0.
Since the vertical homomorphism in the middle of the diagram takesthe fundamental class [∂U] to [∂B], and [U] and [B] are unique classesfor which ∂[U] = [∂U] and ∂[B] = [∂B], we conclude that [U] maps to[B], and therefore (U, ∂U)→ (B, ∂B) is of degree one.
Since U ∩M0 = ∂U, by the relative Mayer-vietoris sequence,
Hi(M, ∂U) ≈ Hi(M0, ∂M0)⊕ Hi(U, ∂U).

162 elements of surgery theory
11 The map M0 → X0 is not a degreeone map, but we still have Hk M0 =HkX0 ⊕ Kk M where Kk M0 is the kernelof the homomoprhism Hk M0 → HkX0,and we still have
Kk M0 ≈ Km−k(M0, ∂M0).
12 Indeed, we have Ki(M0, ∂M0) =Ki(M, U). Note that KqU → Kq M is sur-jective, and therefore, Kq(M, U) = 0.
Since [U] maps to [B], we deduce that [M0] maps to [X0]:
0 H2q+1M H2q+1(M, ∂U) H2q∂U 0
0 H2q+1X H2q+1(X, S2q) H2q∂S2q 0.
A priori, the center x0 in B may be in the image of the map (M0, ∂M0)→(X, S2q). However, since the component [U] of the image of [M0] iszero, we deduce that the inverse image of x0 with respect to f |M0 con-sists of even number of points z1, ..., z2s of alternating signs. All pointsz1, ..., z2s belong to a simply connected neighborhood of U, and there-fore we may use the Whitney trick to further modify the map f so thatf (M0) does not contain x0. Next we may use the radial homotopy off over f−1(B) ∩M0 to obtain a map which we still denote by f suchthat f (M0) contains no interior points of B.
Then the map f together with decompositions M = M0 ∪U and X =
X0 ∪ B is a degree one splitting.
Lemma 14.14. There is a short exact sequence11
0→ Kq+1(M0, ∂M0)→ Kq(∂M0)→ Kq M0 → 0,
of stably free modules. If Kq+1(M0, ∂M0) is free, then Kq+1(M0, ∂M0) isthe dual module for Kq+1(M0, ∂M0). By performing trivial surgeries in theinterior of M0, we may assume that all modules in this short exact sequenceare free.
Proof. We may assume that the map f : (M0, ∂M0) → (X0, S2q) is aninclusion of a pair of CW-complexes. Then the map of the correspond-ing cellular chain complexes is injective, and there is a chain complexD∗ such that there is a short exact sequence
0→ C∗(M0, ∂M0)→ C∗(X0, S2q)→ D∗−1 → 0.
and Hi(D∗) = Ki(M0, ∂M0). On the other hand, Ki(M0, ∂M0) = 0for i 6= q + 1.12 Since Hi(D∗) = 0 for i 6= q + 1, we deduce thatDi = Bi ⊕ Bi−1 for i < q + 1, and Dq+1 = Zq+1 ⊕ Bq. In other words,the complex D∗ has the form
→ Dq+2 → Zq+1 ⊕ Bq → Bq ⊕ Bq−1 → · · · .
This implies that Hi(D∗) = 0 for i < q + 1. Thus, we have
Kq+1M0 ≈ Kq(M0, ∂M0) = Hq(D∗) = 0,

surgery on non-simply connected manifolds 163
13 If P ⊕ Q is free, then Ki(M0, P) is adirect summand of the trivial moduleKi(M0; P⊕Q).
14 The homomorphism is injective by Ex-ercise 14.14. Note also that F is the im-age of the injective boundary homomor-phism Kq+1(U, ∂U)→ KqU.
where the first isomorphism is the Poincaré duality isomorphism. Thisshows that the sequence in the statement of Lemma 14.14 is exact.
Next, we observe that if Hq+1(D∗) = 0, then the short exact sequenceBq+1 → Zq+1 → Hq+1(D∗) splits. Hence, Hq+1D = HomΛ(Hq+1D, Λ).
Next, let us show that Kq M0 is stably free. To this end consider therelative chain complex E∗ such that C∗M0 → C∗X0 → E∗ is a shortexact sequence of chain complexes. Then Hi(E) = Ki M0 = 0 for i < q.
On the other hand, since the complex D∗ splits in degrees i < q + 1,we deduce that its homology Ki(M0, ∂M0; P) are trivial for i < q + 1for any Z[π]-module P. Therefore, by the argument in the proof ofCorollary 13.9, the Poincaré dual groups Ki(M0; P) are also trivial fori > q.13 Thus, by Theorem 13.13, the module Kq M0 is stably free. Byperforming trivial surgeries in the interior of M0, we may make Kq M0
free. Then the short exact sequence in the statement of Lemma 14.14
splits. Hence Kq+1(M0, ∂M0) is also stably free.
Let us look more closely at a trivial surgery in the interior of M0. Sucha surgery replaces the manifold M with M′ = M#Sq× Sq+1. We choosethe sphere Sq × pt as a representative of an additional generator ofKq M. Then U is replaced with U′ = U#bSq × Dq+1. Consequently, thegroup Kq(∂M0) is replaced with Kq(∂M0)⊕Z[π]⊕Z[π], while eachgroup Kq+1(M0, ∂M0) and Kq M0 is stabilized by a copy of Z[π]. Thus,indeed, by performing trivial surgeries in the interior of M0 we maymake Kq+1(M0, ∂M0) free.
14.3.2 ε-quadratic formations
To motivate the definition of ε-quadratic formations, let M = M0 ∪Uand X = X0 ∪ B be a Heegaard splitting for a normal degree one mapf . Recall that the boundary ∂U = ∂M0 is a sphere with k handles#Sα × Sq. Let K denote its homology in degree q, but threaded in M.Then K is a free Z[π]-module with 2k-generators m1, ..., mk, `1, ..., `kwhere mi and `i are respectively the meridian and longitude in thei-th summand. The module K comes with forms λ and µ such that(K, λ, µ) is a hyperbolic ε-quadratic form over Z[π]. The meridiansmi generate a Z[π]-submodule of K denoted by F. Next, consider theZ[π]-module G given by the image of the injective boundary homo-morphism Kq+1(M0, ∂U) → Kq∂U.14 The module F is a free Z[π]-submodules of rank k. Without loss of generality we may also assume

164 elements of surgery theory
15 See Lemma 14.14.
that G is a free Z[π]-submodule.15 The set K( f ) = (K, λ, µ, F, G) is anexample of an ε-quadratic formation.
Definition 14.15. Let (K, λ, µ) be an ε-quadratic form on a free Z[π]-module K. Given a submodule L of K, the orthogonal module L⊥ toL consists of all elements y ∈ K orthogonal to all elements x ∈ L,i.e., λ(x, y) = 0. We say that a submodule L in K is lagrangian if itis a free direct summand, and L = L⊥, and µ|L = 0. An ε-quadraticformation (K, λ, µ, F, G) over Z[π] consists of a non-singular quadraticform (K, λ, µ) as well as an ordered pair of lagrangians F and G.
Exercise 14.16. Show that the set K( f ) is indeed an ε-quadratic forma-tion.
Proof. The submodule F is clearly a lagrangian. Let us show that G =
Kq+1(M0, ∂M0) is also a lagrangian in K = Kq(∂M0). An elementx ∈ G, corresponds to an element ∂x in K; the latter is representedby an immersed framed sphere in M0 = Sq × Sq. In view of the shortexact sequence of the pair (M0, ∂M0), the sphere ∂x represents a trivialelement in Kq M0 = πq+1( f |M0). Therefore, it bounds an immerseddisc Dx of dimension q + 1 in M0. Given two elements x, x′ in G, wemay assume that the discs Dx and Dx′ associated with x and x′ areintersected transversally along arcs and circles. As in Lemma 6.1, wededuce that λ(∂x, ∂x′) = 0. To prove that µ(x) = 0 for every x ∈ G,we consider the arcs of the self-intersection points of Dx, instead of thearcs in Dx ∩ Dx′ .
It remains to show that G = G⊥. Suppose that there is an elementx ∈ G such that λ(∂x, ∂x′) = 0 for all x′ ∈ G. By the Poincaré du-ality isomorphism the module Kq M0 is isomorphic to Kq+1(M0, ∂M0),which in its turn is dual to Kq+1(M0, ∂M0) by Lemma 14.14. Thus,there is an element y ∈ Kq+1(M0, ∂M0) such that for x∗ = [M0] ∩ x wehave x∗(y) 6= 0. Thus λ(∂x, ∂y) 6= 0 contrary to the assumption thatλ(∂x, ∂y) = 0 for all y ∈ G.
Exercise 14.17. Let (K, λ, µ) be an ε-quadratic form on a free finitelygenerated Z[π]-module K. Show that the inclusion of any lagrangianL → K extends to an isomorphism of ε-quadratic forms Hε(L) ≈(K, λ, µ). In particular, only hamiltonian forms admit lagrangians.
Proof. Let p1, ..., pk be a basis for L. Since the form λ is non-degenerate,we may find elements y1, ..., yk such that λ(yi, pj) = δij. We next usethe Gramm-Schmidt process to replace yiwith an orthonormal tuple

surgery on non-simply connected manifolds 165
16 If ∑ pi gi + ∑ xihi = 0, taking the λ-product of the left and right hand sideswith pj and xj gives hj = gj = 0.
17 For any basis element pj in L we have
λ(pj, z′) = λ(pj, z)− ελ(pj, xj)λ(pj, z),
which is zero since λ(pj, xj) = ε.
18 Indeed, K = Λ〈mi , `i〉, F = Λ〈mi〉 andKqU = Λ〈`i〉.
19 Indeed, Kq+1(M, U) =Kq+1(M0, ∂M0) ≈ G.
20 Ranicki explicitly requires here thatm ≥ 5.
xi. Namely, define xi = yi − ε ∑ pjgij, where the coefficients gij aresuch that
0 = λ(xi, xj) = λij − ελ(yi, pigji)− ελ(pjgij, yj) = λij − εgji − gij,
and0 = µ(xi) = µ(yi − ε ∑ pjgij) = µ(yi)− εgii.
Thus, we may put gii = εµ(yi), and gij = 0 for i > j and gij = ελij fori < j.
It remains to show that pi, xi is a hyperbolic basis for K. To beginwith, the vectors pi, xi are linearly independent.16 Thus, the vectorspi, xi form a basis for a free submodule K′ of K. Suppose there is avector z ∈ K which is not in K′. Then the vector z′ = z− ε ∑ xiλ(pi, z)is also in K \ K′. On the other hand, clearly z′ ∈ L⊥,17 which impliesthat z′ is an element in L ⊂ K′, contrary to the assumption. Thuspi, xi is indeed a basis for K.
Corollary 14.18. The quadratic form (K, λ, µ)⊕ (K,−λ,−µ) is hyperbolic.
Proof. Indeed, such a form admits a diagonal lagrangian (x, x).
Since KqU = K/F,18 the exact sequence of Z[π]-modules
0→ Kq+1M→ Kq+1(M, U)∂U−→ KqU → Kq M→ 0
implies19 that Kq M = K/(F + G) and Kq+1M = F ∩ G. For example,when G is generated by the longitudes `i, we deduce that Kq M = 0,and therefore f is a homotopy equivalence.20 More generally, an ε-quadratic formation (K, λ, µ, F, G) is trivial if K = (K, λ, µ) is a hyper-bolic ε-quadratic formation (Hε(F), F, F∗).
Given a normal degree one map f : M→ X, there are many choices ofgenerators Sα of Kq M which may lead to non-isomorphic formations.We say that formations K and K′ are stably isomorphic if K⊕ T = K′ ⊕T′ for some trivial formations T and T′.
Exercise 14.19. Show that Heegaard splittings of f associated withdifferent choices of generators Sα lead to stably isomorphic formations.
Our next step is to determine how a stable isomorphism class of for-mations of f changes under normal cobordism of f . Let (K, λ, µ) be apossibly singular (−ε)-quadratic form. Then the graph Γλ of the func-tion λ : K → K∗ is a submodule of K ⊕ K∗ which consists of elements

166 elements of surgery theory
21 It can be shown that a ε-quadratic for-mation K with lagrangians F and G isa boundary if and only if there is a la-grangian L in K which is a direct com-plement to both the lagrangians F andG.
of the form (x, λ(x)). We say that the formation (Hε(K), K, Γλ) is theboundary formation ∂(K, λ, µ).21 We say that formations K and K′ arecobordant if K⊕ B = K′ ⊕ B′ for some boundary formations B and B′.It turns out that the cobordism classes of formations forms a groupunder the operation given by taking the direct sum of formations.
Exercise 14.20. Show that cobordism is an equivalence relation, andK ⊕ K′ is cobordant to zero, where K = (K, λ, µ, F, G) and K′ =
(K,−λ,−µ, F, G).
Definition 14.21. The group L2q+1(Z[π]) is defined to be the cobor-dism group of ε-quadratic formations, where ε = (−1)q.
We will show that for a normal, degree one, q-connected map f : M→X of manifold of dimension 2q + 1, the formation represents an ele-ment in L2q+1 which is trivial if and only if f is normally cobordant toa homotopy equivalence.
Theorem 14.22. Let f : W → X × [0, 1] be a normal (q + 1)-connectedbordism between maps f0 and f1 of degree 1 of manifolds W0 and W1 ofdimension 2q + 1. Then the formations K( f0) and K( f1) are cobordant.
To prove Theorem 14.22 we will associate with the cobordism f an ε-quadratic form K( f ) and show that K( f0)⊕ (−K( f1)) = ∂K( f ). The ε-quadratic form K( f ) is the kernel (−ε)-quadratic form (Kq+1W, λW , µW)
of the normal degree one map (W, ∂W) → (X × [0, 1], X × ∂[0, 1]).Note that the intersection form λW is defined by
Kq+1W → Kq+1(W, ∂W)→ Kq+1W = (Kq+1W)∗.
Explicitly, the form ∂K( f ) is the formation on a hyperbolic quadraticε-form Hε(FW) with lagrangians FW = Kq+1W, and Γ = (x, λW(x)).
Proof of Theorem ??. It suffices to construct an isomorphism
(Hε(FW), FW , Γ)→ (Hε(F0), F0, G0)⊕ (−Hε(F1), F1, G1).
where the two summands on the left hand side are the formationsK( f0) and K( f1). The map FW → F0 ⊕ F1 is defined by
FW = Kq+1W → Kq+1(W, W1)⊕ Kq+1(W, W0) ≈ F0 ⊕ F1.
There is also a map F∗W → F∗0 ⊕ F∗1 given by
F∗W = Kq+1W → Kq+1(W, W1)⊕ Kq+1(W, W0) = F∗0 ⊕ F∗1 .

surgery on non-simply connected manifolds 167
22 We recall that W is obtained fromW0 × [0, ε] by attaching handles Dq+1 ×Dq+1 along Sq × Dq+1. Alternatively,we may say that W is obtained fromW1 × [1 − ε, 1] by attaching handlesDq+1 × Dq+1 along Dq+1 × Sq. In par-ticular, Kq+1(W, W1) = Kq+1(Dq+1 ×Dq+1, Dq+1 × Sq). Thus, indeed, we canidentify F with FW . On the other hand,the lagrangian GW = Kq+1W is
Kq+1(W, Dq+1 × Dq+1) =
= Kq+1(M0 × [0, 1], ∂M0 × [0, 1]) = G.
These two maps define a map Hε(FW) → Hε(F0). By definition takesthe lagrangian FW to F0 ⊕ F1. Next, let’s find the image of the la-grangian, which is the graph of the map λW : FW → F∗W .
Let f : W → X× [0, 1] be a normal q+ 1-connected cobordism of degree1 between normal q-connected maps of degree 1 of manifolds W0 of W1
of dimension m = 2q + 1. It follows that Kq+1W, and Kq+1(W, Wi) arefinitely generated free Z[π]-modules. The normal cobordism f definesan ε-quadratic formation (K, FW , GW) on f |W0 by
FW = Kq+1(W, W1), GW = Kq+1W, K = Hε(FW),
where G is included into K = FW ⊕ F∗W by the sum of the map GW →FW induced by inclusion and the map GW → F∗W given by the compo-sition
GW → Kq+1(W, W0) ≈ Kq+1(W, W1) ≈ Kq+1(W, W1)∗.
Exercise 14.23. Show that when W is obtained by surgeries on M alongthe generators of Kq M in the beginning of the section, the resulting for-mation is the same as the formation in the beginning of the section.22
Lemma 14.24. A kernel formation of a degree 1, n-connected, normal mapf : M→ X is a boundary iff f is bordant to a homotopy equivalence.
Proof. Suppose that W → X × [0, 1] is a normal bordism of f to ahomotopy equivalence, we can make it (q + 1)-connected by surgerybelow the middle range. It defines a formation with G = Kq+1W ≈Kq+1(W, W1) = F, and the inclusion of G → F ⊕ F∗ given by theisomorphism G → F induced by the inclusion, and the composition
G → Kq+1(W, M) = (Kq+1W)∗.
Consider the lagrangian L = F∗ ⊂ K. Clearly, F ⊕ F∗ = K. We alsoclaim that G⊕ F∗ = K, which is obvious. Thus, the formation associ-ated with f is a boundary.
On the other hand if a kernel formation of f is a boundary, then itis associated with a cobordism W of Exercise 14.23 to a homotopyequivalence.

168 elements of surgery theory
14.4 Further reading
According to S. P. Novikov, the odd dimensional groups L2q+1(π) wereintroduced by Wall in [Wall70] in 1968. The even dimensional groupsL2q(π) has been introduced earlier by Novikov [No66], [No66a] andWall [Wall66]. The original definition of groups L∗ is related to theoriginal definition of groups K∗.
For a ring A with the identity element, the group K0 A is the Grothen-dieck group of the monoid of isomorphism classes of finitely gener-ated projective A-modules. The group K1 A is the abelianization ofthe general linear group GL(A)/[GL(A), GL(A)]. The definition ofthe groups L2q is similar to the definition of the groups K0, while theWall’s definition of L2q+1 is related to the definition of K1.
14.5 Solutions to Exercises
Solution to Exercise 14.3. Let M be a closed manifold of dimension m,with fundamental class [M]. Then there is a well-defined pairingin cohomology Hq M ⊗ Hq M −→ Z[π] which takes a pair (x, y) tox([M] ∩ y). The adjoint to the cohomology pairing is the compositionHq M ≈ Hq M → (Hq M)∗ of the Poincaré duality and the map thattakes z to the homomorphism x 7→ x(z). The homology intersectionpairing
Hq M⊗ Hq M −→ Z[π]
is defined by taking (u, v) to U(v) where U is Poincaré dual to u.
Suppose now that f : M→ X is a q-connected degree one map. The in-tersection form on Kq M is defined by restricting the intersection formon Hq M = HqX⊕ Kq M. The adjoint to the pairing is the composition
Kq M→ HqX⊕ Kq M ≈ HqX⊕ Kq M→ Kq M→ (Kq M)∗.
of the inclusion, the Poincaré duality, the projection, and the the homo-morphism that takes x to the homomorphism y 7→ y(x). The composi-tion of the first three homomorphisms is the Poincaré duality isomor-phism, while the last map is an isomorphism by Lemma 13.14. Thus,the intersection pairing on Kq M (or, equivalently, the intersection pair-ing on Kq M) is non-degenerate.

surgery on non-simply connected manifolds 169
Solution to Exercise 14.5. To begin with let us prove the property:
λ(S1, S2) = (−1)qλ(S2, S1),
For i = 1, 2, let wi denote the thread of the i-th sphere Si, i.e., wi is achosen path from the base point in M to the basepoint in Si. Givenan intersection point xj in S1 ∩ S2, let u1j and u2j denote unique up tohomotopy paths from the basepoints of S1 and S2 to xj. Then
λ(S1, S2) = ∑ εS1,S2(xj)w2u2ju−11j w−1
1 = ∑ εS1,S2 g,
λ(S2, S1) = ∑ εS2,S1(xj)w1u1ju−12j w−1
2 = ∑ εS2,S1 g−1.
The sign εS1,S2(xj) is positive if and only if the orientation of M givenby the orientation of S1 followed by the orientation of S2 agrees withthe orientation of Txj M obtained from the orientation of the plane Tp Mat a distinguished point p ∈ M by transporting it along u1jw1. Thesign εS2,S1(xj) is defined similarly, except now the orientation of S2
is followed by the orientation of S1, and the orientation on Tp M istransported along u2jw2. Thus, εS2,S1(xj) differs from εS1,S2(xj) by thefactor (−1)qw(g). Consequently,
λ(S1, S2) = ∑ εS1,S2(xj)g = ∑(−1)qεS2,S1(xj)w(g)g = (−1)qλ(S2, S1),
where g = w(g)g−1.
Next, let us turn to the distributivity property:
λ(S, S1g1 + S2g2) = λ(S, S1)g1 + λ(S, S2)g2.
We clearly have the property λ(S, S1 + S2) = λ(S, S1) + λ(S, S2), andtherefore, it suffices to show that λ(S1, S2h) = λ(S1, S2)h. We have
λ(S1, S2h) = ∑ εS1,S2h(xj)h−1w2u2ju−11j w−1
1 = ∑ εS1,S2hh−1g,
λ(S1, S2)h = ∑ εS1,S2(xj)h−1w2u2ju−11j w−1
1 = ∑ εS1,S2 h−1g.
It remains to observe that εS1,S2h = εS1,S2 , since the path u1jw1 alongwhich the orientation from Tp M to Txj M is transported is the sameboth for calculation of the sign εS1,S2h, and the sign εS1,S2 .
The proof of the following property is similar to one in the simplyconnected case:
µ(S1 + S2) = µ(S1) + µ(S2) + λ(S1, S2),
Indeed, since λ is a well-defined map on K × K, we may assumethat S1 and S2 are Wall representatives of their homotopy classes.Then the self-intersection points contributing to µ(S1 + S2) are the

170 elements of surgery theory
self-intersections points contributing to µ(S1) and µ(S2) as well as theintersection points between S1 and S2.
The next property follows immediately from the definitions:
µ(Sg) = ∑ εSg(xj)g−1wu2ju−11j w−1g = gµ(S)g,
since εSg = εS · w(g). Finally, let us show that
λ(S, S) = µ(S) + (−1)qµ(S) = 2µ(S).
The latter equality is immediate since in Λε we have g = (−1)q g. Next,since λ is a well-defined map, we may assume that S is a Wall repre-sentative of its homotopy class. In particular, its normal bundle inM is trivial. Therefore, each self-intersection of S contributes two in-tersection points between S and its close transverse copy S′. How-ever, the "signs" of the two intersection points between S and S′ arethe same as one of the self-intersection point of S, which implies thatλ(S, S) = 2µ(S).
Solution to Exercise ??. Consider the diagram of short exact sequences:
C∗(Dm, Sm−1) −−−−→ C∗X −−−−→ C∗X0y y yC∗Dm −−−−→ C∗X −−−−→ C∗(X0, Sm−1),
where vertical maps are given by taking the cap product with [Dm],[X] and the class [X0] defined from [X] by the composition
HmX → Hm(X, Dm) ≈ Hm(X0, Sm−1).
where the homology groups are with coefficients in Zω. Similarlyconsider the diagram
C∗(X0, Sm−1) −−−−→ C∗X −−−−→ C∗Dmy y yC∗X0 −−−−→ C∗X −−−−→ C∗(Dm, Sm−1),

99
Additional Topics

172 elements of surgery theory
1 It is remarkable that the map f is notonly smooth, but its differential is every-where surjective. A map between closedmanifolds with such a property is a fiberbundle, and, in particular, a fibration.
Figure 99.1: The sphere S3 lies in C2 =R3 ×R with R3 being horizontal and R
vertical. The framed manifold M is anequatorial circle S1 in S in the horizontalplane spanned by e1 and e2. The normalequatorial direction νe is the remaininghorizontal direction e3, while the normalvertical direction νv is the vertical direc-tion e4.
99.1 Topics for Chapter 1
99.1.1 Hopf fibration
There is an important map S3 → S2 that even has its own name. It iscalled the Hopf fibration. In this section we will apply the Pontryaginconstruction to find the framed manifold M corresponding to the Hopffibration. This explicit example may help the reader better understandthe nuances in the general Pontryagin construction. Otherwise, thereader may skip this subsection as we will not need its results else-where.
The Hopf fibration is best defined in terms of complex numbers. Tobegin with, the sphere S3 can be identified with the subset of C× C
of complex vectors (u, v) of length 1. If we identify every point (u, v)of S3 with any other point of the form (λu, λv), where λ ∈ C \ 0,then we obtain the so-called complex projective line CP1 which is alsoa sphere S2. We will denote the equivalence class of a point (u, v) inCP1 by [u : v], and identify the point [1 : 0] with the north pole of S2.
By definition, the Hopf fibration f is a map S3 → S2 defined by theprojection (u, v) 7→ [u : v].1
The Pontryagin theorem identifies the homotopy class in π3S2 of theHopf fibration with the cobordism class of a framed manifold M ofdimension 1 in R3, where the manifold M is the inverse image of thenorth pole [1 : 0], i.e., the manifold M is the circle (eiθ , 0) in C×C.To find the frame of the manifold M, let’s choose a basis e1, e2 of thetangent space of S2 at the north pole. For example, we may choosee1 and e2 to be the velocity vectors of the curves [1 : t] and [1 : it]respectively.
For each point x = (eiθ , 0) on the manifold M, we may use the differ-ential dx f to pull the vectors e1 and e2 back to a basis τ1, τ2 of theperpendicular space T⊥x M. The easiest way to do that is by lifting thecurves [1 : t] and [1 : it] to S3. For example, the curve
r(t)(eiθ , teiθ), where r = (1 + t2)−1/2,
is a lift of the curve [1 : t], i.e., it maps by the Hopf fibration f preciselyto the curve [1 : t]. Consequently, its velocity vector (0, eiθ) at x projectsby dx f to the vector e1. Clearly, the vector (0, eiθ) is orthogonal to themanifold M, and therefore it is the desired vector τ1. Similarly, we findthat τ2 is the vector (0, ieiθ).

additional topics 173
Figure 99.2: The stereographic projec-tion: a point x in S3 that is not the southpole corresponds to the point y in R3
that lies on the same line as the southpole of S3 and x.
Figure 99.3: The end points of the vectorfield τ1 form a closed curve that windsaround the circle M. The linking num-ber between the curve of end points ofτ1 and M is −1.
Figure 99.4: A pair of pants cobordismsplits a circle into two circles. The in-verse cobordism merges two circles intoone.
In particular, the perpendicular space T⊥θ M of M in S3 is spanned bythe perpendicular vectors e3 and e4, and, for example, the frame vectorfield τ1 is written as τ1(θ) = cos(θ)e3 + sin(θ)e4.
Finally, let us use the stereographic projection, see Figure 99.2, to iden-tify S3 \ ∞with R3. To begin with, the stereographic projection takesthe equatorial sphere S2 of S3 into the unit sphere S2 in R3. Since M isan equatorial circle, it remains an equatorial circle
x21 + x2
2 = 1, x3 = 0 ⊂ R3,
where (u, v) = (x1 + ix2, x3 + ix4), and the equatorial normal directione3 stays put. On the other hand, up to scaling, the normal directione4 at x ∈ M transforms by the stereographic projection into the vec-tor −x. Thus, the framed manifold M ⊂ R3 of the Hopf fibration isthe standard circle in R3 equipped with frame vector fields τ1(x) andτ2(x) that twist around the circle once as x traverses the circle, seeFigure 99.3.
99.1.2 Stable homotopy group πS1
In this section we will sketch an argument that the unstable homotopygroup π3S2 is isomorphic to Z, while the stable homotopy group πS
1is isormorphic to Z2. Later we will establish these isomorphisms by adifferent argument.
The unstable group π3S2.
We will only sketch here a calculation of π3S2. A detailed proof willbe given in section 3.4.
Let us identify S2 with R2 ∪ ∞ so that 0 is the north pole and ∞ isthe south pole of S2. Let f : S3 → S2 be a map representing an elementin π3(S2). The Pontryagin construction identifies the homotopy classof f with the cobordism class of a framed manifold M = f−1(0) ofdimension 1 in R3.
By a framed cobordism (see Figure 99.1.2) the manifold M can be mod-ified into the standard unit circle in R2 ⊂ R3 with a framing τ. As apoint x runs over the standard unit circle, the framing τ(x) makes wfull twists for some integer w. It turns out that the correspondence[ f ] 7→ w is a well-defined isomorphism π3S2 ≈ Z. In particular, theHopf fibration is a generator of π3S2. 2

174 elements of surgery theory
2 It is worth mentioning that there is ashort homotopy theoretic calculation ofπ3S2 by means of the homotopy long ex-act sequence of the Hopf fibration:
· · · → 0→ π3S3 → π3S2 → 0→ · · · .
Note that the middle homomorphism isdefined by taking an element of [ f ] ∈π3S3 to the homotopy class of the com-position h f of f with the Hopf fibra-tion h. In particular, the generator [id] ofthe group π3S3 that we have computedmaps to the generator h id = h of thegroup π3S2. In other words, the groupπ3S2 is generated by the class [h] of theHopf fibration h.
3 To show that πS1 is non-trivial, Pontrya-
gin identified the stable group πS1 with
the cobordism group of framed mani-folds M of dimension 1 in Rk for k > 3,and introduced an invariant δ. Given aframe ( f1(x), ..., fk−1(x)) at a point x ofM, we may assume that it is orthonor-mal in view of the Gram-Schmidt pro-cess. There is a unique vector fk(x) at xsuch that ( f1(x), ..., fk(x)) is an orthonor-mal basis for Rk . Assigning to eachpoint x an orthonormal basis, defines amap γ : M → SO(k). Pontryagin defineda homomorphism δ : πS
1 → Z2. WhenM is connected, the invariant δ equalszero when the curve γ is non-homotopicto the constant curve and 1 otherwise.When M consists of more than one com-ponent, the invariant δ is defined to bethe sum of values of δ on componentsof M mod 2. It immediately follows thatthe value of the homomorphism δ on theframed manifold of the Hopf fibrationis 1, which implies that the group πS
1 isnon-trivial.
4 We will discuss later the Whitney em-bedding theorem, which implies that ifk > m + 1, then M and −M representthe same cobordism class, and thereforeevery element of N(m, k) is of order 2 inthis case.
The stable group πS1 (Sketch of the Pontryagin calculation). Next,
let us turn to investigating the stable homotopy group πS1 . By the
Freudenthal theorem, the group πS1 can be identified with the group
π4S3. In view of the Pontryagin construction, its elements are repre-sented by framed closed curves M in S3. Furthermore, by the Freuden-thal theorem, the group π4S3 is a surjective image of the cyclic groupπ3S2 ≈ Z, and therefore, the group π4S3 is generated by the Freuden-thal suspension of the Hopf element [h]. It turns out that the gener-ator [h] of πS
1 is non-trivial and satisfies 2[h] = 0. This implies thatπS
1 ≈ Z2, see section 3.4. 3
99.1.3 The Pontryagin-Thom construction
After the appearance of the Pontryagin construction, Rene Thom re-alized that its generalization can be used to compute the cobordismgroups N(m, k) of manifolds in Rm+k. The generalization proposed byThom is now known as the Pontryagin-Thom construction. We willsketch it here.
As a set the group N(m, k) consists of the cobordism classes of mani-folds of dimension m in Rm+k. The sum of classes [M0] and [M1] rep-resented by manifolds M0 and M1 is defined by first translating M0
so that M0 is disjoint from M1, and then taking the cobordism class[M0 t M1] of the disjoint union of manifolds. As in the case of thecobordism group of framed manifolds, it can be shown that N(m, k) isan abelian group. Its zero is the cobordism class of an empty mani-fold. The inverse of an element [M] is the element [−M] constructedas in the case of the cobordism group of framed manifolds, exceptthat now the manifolds under consideration are not framed. Note thatthe manifold −M is a "mirror" reflection of M. In other words, it isdiffeomorphic to M, but it is placed in Rm+k differently.4
For example, the group N(0, k) for k > 1 is isomorphic to Z2. In-deed, let ϕ : N(0, k) → Z2 be the homomorphism that associates withthe class [M] of a 0-dimensional manifold M, the parity of the num-ber of points in M. If two manifolds M0 and M1 of dimension 0 arecobordant, then the number of points in M0 has the same parity as thenumber of points in M1. Thus, ϕ is well-defined. Furthermore, sincetwo points bound a segment, ϕ is injective. Clearly, it is also surjective.
The group N(1, k) for k > 2 is trivial since a closed manifold of dimen-sion 1 is a finite union of circles bounding discs. The group N(2, k)

additional topics 175
5 In general, the parity of the Euler char-acteristic of a manifold is an invariant ofcobordism, i.e., if two manifolds M0 andM1 are cobordant, then the parities oftheir Euler characteristics are the same.
6 The space Grm(Rm+k) of vector sub-spaces L of Rm+k of dimension m iscalled the Grassmann manifold. It is thequotient space O(m + k)/ O(m) × O(n)of the orthogonal group O(m + k). Thetopology on the space of pairs (L, v) isdefined to be the coarsest topology forwhich the projections (L, v) → L to theGrassmann manifold and (L, v) → v toRm+k are continuous.
for k > 3 is isomorphic to Z2 with an isomorphism N(2, k)→ Z2 thatevaluates the parity of the Euler characteristic of a manifold.5 Higherorder cobordism groups are hard to find at this point.
In order to calculate the group N(m, k) in general, Rene Thom consid-ered the topological space of pairs (L, v), where L is a vector subspaceof Rm+k of dimension k and v a vector in L.6 Let MO(m, k) denote theone point compactification of this space.
Theorem 99.1 (Thom). There is an isomorphism of the cobordism group ofmanifolds of dimension m in Rm+k and the group πm+k MO(m, k).
Sketch. To construct the isomorphism N(m, k) → πm+k MO(m, k), letM be a manifold of dimension m in Rm+k representing an element inthe cobordism group. Let U denote an ε-neighborhood of M; it consistsof points x + w where x ranges over points in M and w ranges overvectors of length |w| < ε in T⊥x M. Define a map f |U : U → MO(m, k)by taking x + w to (L, v) = (T⊥x M, w/(ε − |w|)), and extend it to amap of Sm+k = Rm+k ∪ ∞ by sending the complement to U ontothe distinguished point of MO(m, k). The map f : Sm+k → MO(m, k)represents an element in πm+k MO(m, k). Following the argument inthe proof of the Pontryagin theorem, it can be shown that the corre-spondence [M] 7→ [ f ] is an isomorphism of groups.
As in the case of framed manifolds, a manifold in Rm+k can be re-garded as a manifold in Rm+k+1 ⊃ Rm+k. This defines a homomor-phism N(m, k)→ N(m, k + 1), which is an isomorphism for k > m + 1.In particular, we may define a cobordism group Nm of manifolds of di-mension m as a group N(m, k) for any k > m + 1. By the Thom theo-rem, the group Nm is isomorphic to πm+k MO(m, k) for any k > m + 1.
99.1.4 The stable J-homomorphism
The Pontryagin construction identifies the stable homotopy group πSm
of spheres with the cobordism group of framed manifolds M of dimen-sion m. The simplest elements in the group πS
m are those representedby a framed sphere Sm ⊂ Rm+1 ⊂ Rm+k, where k > m + 1.
There is a canonical frame of Sm given by the normal unit vector ofSm in Rm+1 followed by the coordinate vectors em+2, ..., em+k in Rm+k.Let v(x) = v1(x), ..., vk(x) be another frame of Sm. By using the

176 elements of surgery theory
7 Strictly speaking, in the definition ofhomotopy groups πmX of a space X weneed to consider only based maps. How-ever, since SOk is an H-space, free ho-motopy classes of maps Sm → SOk arein bijective correspondence with basedhomotopy classes of based maps Sm →SOk .
8 Consider a map SOk → Sk−1 that asso-ciates with a rotation of Rk the image ofthe first coordinate vector e1. The longexact sequence of the fibration impliesthat πmSOk−1 ≈ πmSOk provided thatk > m + 2.
9 Note that in this case πmSO is eithertrivial or Z2. Therefore, in this case theimage of the J-homomorphism is either0 or Z2.
10 Of course, if the image of J : Z → πSm
is a finite group Zd of order d, then thekernel of J is an infinite subgroup of Z
generated by d ∈ Z.
11 To pass from one series to another one,observe that
xthx
=2x
e2x − 1+ x.
Gram-Schmidt orthogonalization process, we may assume that theframe v(x) is orthonormal at each point x in Sm. Then, the frame vdefines a continuous map Sm → SOk that associates with each pointx the rotation of the canonical frame at x to the frame v(x). In otherwords, there is a bijective correspondence between frames v and theelements of the homotopy group πmSOk. 7
The famous J-homomorphism is the map J : πmSOk → πm+k(Sk) thatassociates with each frame v of the sphere Sm the corresponding ele-ment in πm+kSk.
When k > m + 1, the group πm+kSk does not depend on the actualvalue of k, by the Freudenthal theorem. It is isomorphic to the stablehomotopy group πS
m. On the other hand, it is also well-known thatin the dimensional range k > m + 2 the group πmSOk is stable; it isdenoted by πmSO.8 Thus, there is a so-called stable J-homomorphism
J : πmSO −→ πSm.
The calculation of the J-homomorphism is a hard theorem establishedby Adams and Quillen. We will state their theorem without a proof. Tobegin with, by the so-called Bott periodicity, the group πmSO for m > 0only depends on the value of m mod 8. More precisely, when the valueof m mod 8 is 0, 1, ..., 7, the group πm is isomorphic respectively toZ2, Z2, 0, Z, 0, 0, 0, Z. By the Adams-Quillen theorem, when m 6= 4q−1, the J-homomorphism is injective provided that m > 1.9 Supposenow that m = 4q − 1. This is precisely the case when πmSO ' Z.Then the image of the J-homomorphism is a finite subgroup of πS
m oforder given by the denominator of Bq/4q where Bq is the q-th Bernoullinumber.10 For example,
B1 =16
, B2 =1
30, B3 =
142
, B4 =1
30, B5 =
566
, B6 =691
2730.
In general, the Bernoulli numbers are defined by the formula
zez − 1
= 1− z2− ∑
q≥1
(−1)q+1Bq
(2q)!z2q,
or, equivalently,11 by
xthx
= 1 +B1
2!(2x)2 − B2
4!(2x)4 +
B3
6!(2x)6 − · · · . (99.1)
We will see later that the J-homomorphism is related to exotic smoothstructures on spheres.

additional topics 177
12 For example, suppose that the vectorfield v is everywhere vertical up. Thenat time t the isotopy Ft lifts everythingup by t units. On the other hand, theisotopy Gt not only lifts everything upby t units (as it has the component Ft(x))but it also translates everything down byt units (as it has the component −tem+k),i.e., Gt keeps everything still.
Figure 99.5: For the standard embeddedsphere S2 ⊂ R3, the horizontal set is thehorizontal big circle, while the downsetconsists of the lower half hemisphere.
99.2 Topics for Chapter 2
99.2.1 The Multicompression theorem
The Global Compression Theorem admits a number of improvements,which we will discuss in this section.
Relative Compression Theorem
Let Y be a closed subset in Rm+k−1, and X the part of the manifold Min the cylinder Y×R.
Theorem 99.2 (Relative compression theorem). Let M be a compact man-ifold of dimension m in Rm+k with k > 1. Suppose that a unit perpendicularvector field v over M is already vertical up over X. Then an isotopy anddeformation of v which straighten v up can be chosen so that the points of Xare not displaced.
Proof. As in the proof of the Compression Theorem, we may assumethat the vector field v is nowhere vertical down over the manifold M,and rotate v so that it is at least a bit vertical up. Under the rotation thevector field v over X stays vertical up. Next we extend v over Y ×R
by a vertical up vector field. We may also scale the vector field v ifnecessary so that at each point x of its domain the vector v(x) is of unitlength. Then the vector field v is a function M ∪ (Y ×R) → Sm+k−1
which associates with each point x the vector v(x). By construction,the image of the function v is in the upper hemisphere. Therefore thefunction v can be extended over Rm+k so that outside a neighborhoodof M the vector field v is vertical up. Let Ft be the isotopy along v. Thenthe desired relative isotopy Gt is one12 defined by x 7→ Ft(x)− tem+k.
The Local Compression Theorem
We say that an isotopy of a manifold M is an ε-isotopy if it displaceseach point x ∈ M by a distance no more than ε.
Theorem 99.3. [Local Compression Theorem] Given ε > 0, any unit per-pendicular vector field v over a closed manifold M of dimension m in Rm+k,with k > 1, can be made vertical up by an ε-isotopy of M and a deformationof the vector field v through normal vector fields.

178 elements of surgery theory
13 Note that the vector field v is not verti-cal up only in a small neighborhood ofthe downset. We will show in §99.2.5that we may assume that the downset Dand the horizontal set H are manifoldssuch that ∂D coincides with H. It willfollow that D (as well as H) is relativelysmall, and therefore even though v is notvertical up near D, the relative isotopyGt is small.
Figure 99.6: A sphere M with a perpen-dicular vector field v in R3. The downsetD consists of one point x where v(x) isdownmost.
Figure 99.7: We may always rotate thevector field v so that it is vertical up ev-erywhere except a small neighborhoodof D.
Recall that we say that in Rm+k the plane Rm+k−1 × 0 is horizontal,while the direction 0 ×R is vertical. The horizontal set H is a set ofpoints x in M at which the perpendicular space T⊥x M is horizontal. Ateach point x in M not in the horizontal set, the space T⊥x M is slanted,and therefore there is a downmost directed unit vector ψ(x). By defi-nition, the downset D = D(v) consists of points x at which the vectorv(x) is downmost, i.e., it coincides with ψ(x), see Figure 99.5.
Proof of the Local Compression Theorem. Suppose that the downset D isempty. Then each vector v(x) can be canonically deformed alongthe great circle passing through v(x) and ψ(x) to the upmost vector−ψ(x). On the other hand, the upmost vector field can be canonicallydeformed along great circles to the vertical up vector field. Thus, inthis case the compression theorem can be proven even without usingan ε-isotopy.
When the downset D is not empty, this argument still allows us to as-sume that v is vertical up over the complement in M to a neighborhoodof D, e.g., see Figures 99.6 and 99.7. It turns out that if we constructnow the relative isotopy Gt of the global compression theorem, then byappropriately choosing parameters in the construction of the isotopy,we may guarantee that the relative homotopy Gt is ε-small.13 We willgive more detail in §99.2.5.
The Multicompression Theorem
For applications, the multicompression theorem is most useful.
Theorem 99.4. Suppose that the manifold M of dimension m in Rm+k
is equipped with n < k linearly independent perpendicular vector fieldsv1, ..., vn. Then there is an ambient isotopy Ft that straightens the vectorsv1, ..., vn up in the sense that F0 = id while dF1(vi) = ei for i = 1, ..., n.
Proof. We will prove the multicompression theorem by induction onthe number n of vector fields. The base of induction is the Com-pression Theorem. Suppose that the Multicompression Theorem istrue for manifolds with less than n vector fields. Let us show thatthe theorem is also true when a manifold is equipped with n vectorfields. By induction, we may assume that the vectors v1, ..., vn−1 arealready vertical up. By the Gramm-Schmidt orthogonalization pro-cess, we may also assume that each vn(x) is perpendicular to Tx M andto vi(x) for i < n. We say that the directions parallel to the planespanned by e1, ..., en−1 are vertical, while the directions parallel to the

additional topics 179
14 To visualize this isotopy, we note thatnear a point x ∈W, the projection π of asmall neighborhood of x ∈W to the hor-izontal plane passing through the pointx is a diffeomorphism. Furthermore, theprojection of the constructed isotopy ofthe manifold M near x is the isotopyof π(M) near π(x) along the horizontalplane as prescribed by the CompressionTheorem.
15 That is to say, if we write the map fin local coordinates on M and any coor-dinates on Rm+k , then the matrix of thefirst derivatives of f at x is of rank m.
Figure 99.8: Immersion vs. non-immersion.
16 What does it mean that the familydx f is smooth? Let v(x) be a vectorfield on M. Then the correspondencex 7→ dx f (v(x)) is a function M→ Rm+k .We say that d f is smooth if the con-structed function is smooth for everysmooth vector field v(x).
plane spanned by en, ..., en+k are horizontal. Then the vector vn(x) ateach x ∈ M is in the affine plane Hx of horizontal vectors at x perpen-dicular to Tx M.
Exercise 99.5. Show that for a sufficiently small real number ε > 0,open ε-neighborhoods in Hx of each point x ∈ M form a new manifoldW of dimension m + k− (n− 1) such that the vector fields e1, ..., en−1
over W are normal.
Next we apply the construction in the local compression theorem ex-cept that now we deform and extend the vector field vn only overW in such a way that vn stays horizontal and tangent to W. The lo-cal isotopy of M along vn straightens up the vector field vn over M,and displaces each point x of M by a distance at most ε.14 Since themanifold M stays within W, the isotopy of M is well-defined and thevectors e1, ..., en−1 remain normal to M. This completes the proof ofthe Multicompression Theorem.
99.2.2 The Smale-Hirsch Theorem
The Compression theorem has an important application to ImmersionTheory. An immersion of a manifold M of dimension m to Rm+k is asmooth map f such that for every point x ∈ M the differential d f of fat x is of rank m.15 If an immersion is a homeomorphism onto image,then it is an embedding. An immersion of a compact manifold is anembedding if and only if it is injective. An immersion of M to Rm+k isusually denoted by M # Rm+k.
We note that the differential d f of an immersion is a continuous (andeven smooth) family16 of injective linear maps dx f : Tx M → Rm+k. Aformal immersion of a manifold M into Rm+k is a continuous family ofinjective linear maps Fx : Tx M→ Rm+k parametrized by the points x inM. Note that though each immersion f defines a formal immersion Fwith Fx = dx f , not every formal immersion F is of the form Fx = dx f .
Example 99.6. Let S1 be the standard unit circle in R2. Let v be theunit tangent vector field v in the counterclockwise direction. Then foreach point x in S1, the vector v(x) is a basis of the tangent plane TxS1.Define a formal immersion of S1 to R2 by
Fx : TxS1 −→ R2,
Fx : αv 7→ αe1, (99.2)

180 elements of surgery theory
17 Strong Smale-Hirsch theorem. Astronger version of the Smale-Hirschtheorem is true. Namely, there aretopological spaces Imm(M, N) of im-mersions M → N and formal immer-sions hImm(M, N) as well as a map
d : Imm(M, N)→ hImm(M, N)
that associates with each immersion itsdifferential. The strong version of theSmale-Hirsch theorem asserts that themap d is a weak-homotopy equivalent.In other words, the parametric and rel-ative versions of Theorem 99.7 are alsotrue.
Figure 99.9: The vertical and horizontalcopies of Tx M.
where α ∈ R. If there is an immersion f satisfying Fx = dx f for eachx, then the tangent line to the immersed circle f (S1) is horizontal ateach point of f (S1), which is impossible. Thus F is a formal immersionwhich is not the differential of a genuine immersion.
We are now in position to formulate and prove a version of the cele-brated Smale-Hirsch theorem.
Theorem 99.7 (Smale-Hirsch theorem). Suppose that there is a formalimmersion F of a manifold M of dimension m into Rm+k with k > 0. ThenM admits an immersion f into the Eulcidean space Rm+k.17
Proof. Suppose that M is a submanifold in Rn. We will place M into aneven bigger space Rm+k ×Rn, but with a set of n linearly independentnormal vector fields. The multicompression theorem then will implythe existence of an immersion M→ Rm+k.
We place M with all its tangent vectors into Rm+k ×Rn by mappinga tangent vector v at a point x ∈ M into the pair (Fx(v), x). For eachx, there are now two copies of the plane Tx M. A vertical copy Vx em-bedded into Rm+k × x by Fx and a horizontal copy Hx embeddedinto 0 ×Rn by the inclusion of M into Rn. Note that at this mo-ment we have a manifold M embedded into Rm+k ×Rn and n linearlyindependent horizontal vector fields e1(x), ..., en(x) over M. However,the vector fields e1(x), ..., en(x) are not normal, so before we apply themulticompression theorem we need to deform the vectors ei into thenormal ones.
There is a linear map of Vx ⊕ Hx that sends each vector v ∈ Vx into thecorresponding vector v ∈ Hx and each vector v ∈ Hx into the vector−v ∈ Vx. We may extend this linear map to a linear map θx of Rm+k ×Rn by requiring that θx is trivial on the orthogonal complement toVx ⊕ Hx.
Let ei(x) denote the i-th standard basis vector of 0 ×Rn at the pointx ∈ 0 × M. Since ei(x) is orthogonal to Vx and the linear map θx
takes Vx into Hx, we conclude that θx takes ei(x) to a vector perpen-dicular to Tx M. In other words, we constructed a placement of M intoRm+k × Rn with n linearly independent perpendicular vector fieldsθ(ei) over M. Finally, we use the Multicompression Theorem to get animmersion of M into Rm+k.
It is remarkable that the relative and parametric versions of the Smale-

additional topics 181
Figure 99.10: The standard sphere S withthe unit outward perpendicular vectorfield v and the everted sphere f1(S)with the unit inward perpendicular vec-tor field d f1(v).
18 To prove that d f1(v) as an inward di-rected vector field, note that under reg-ular homotopy an orientation of the reg-ular neighborhood of S is preserved. Atthe north pole the vectors (∂x , ∂y, v) de-fine a positive orientation. We haved f1(∂x) = ∂x , and d f1(∂y) = ∂y. There-fore, d f1(v) should be an inward di-rected vector field.
Figure 99.11: Pushing the southernhemisphere up and northern hemi-sphere down creates a ridge over theequator.
Hirsch theorem are also true. In particular, Theorem 99.8, which isan important version of the Smale-Hirsch theorem, takes place. Toformulate Theorem 99.8, we need two new notions. A deformation ofan immersion through immersions is called a regular homotopy, whilea deformation of a formal immersion through formal immersions iscalled a homotopy.
Theorem 99.8. Let f0, f1 be two immersions of a manifold M of dimensionm into Rm+k with k > 0. Suppose that the formal immersions F0 = d f0 andF1 = d f1 are homotopic through formal immersions Ft, with t ∈ [0, 1], ofthe manifold M to Rm+k. Then f0 is regularly homotopic to f1. In fact, theset of regular homotopy classes of immersions M → Rm+k of a manifold ofdimension m is isomorphic to the set of homotopy classes of formal immersionsof M into Rm+k.
In the following section we will see that Theorem 99.8 considerablysimplifies the study of immersions.
99.2.3 The Smale Paradox
Let S denote the standard unit sphere in R3 centered at the origin. Theinclusion f0 of S to R3 is an embedding. There is another embeddingf1 of S to R3 obtained from f0 by postcomposing it with the reflectionr : (x, y, z) 7→ (−x, y, z) of R3.
Theorem 99.9 (Smale Paradox). There is a regular homotopy ft, with t ∈[0, 1], of the standard embedding f0 to the everted embedding f1.
The regular homotopy ft, whose existence was proved by Smale, evertsthe sphere S inside out. Indeed, extend f to a regular homotopy of aneighborhood of S. Let v be the unit outward perpendicular vectorfield over S. Then d ft(v) is a normal vector field over ft(S) for any t.At time t = 1, the normal vector field d f1(v) is inward directed overf1(S) = S.18 In other words, the outside directed normal vector fieldtransforms under ft into the inside directed normal vector field.
The existence of Smale’s homotopy is not obvious. For example, sim-ply pushing the northern hemisphere down and the southern hemi-sphere up does not accomplish anything. Such a deformation pro-duces a ridge that is not allowed under a regular homotopy, see Fig-ure 99.11.

182 elements of surgery theory
Proof of the Smale paradox. By Theorem 99.8, the set of regular homo-topy classes of immersions S2 → R3 is isomorphic to the set of ho-motopy classes of formal immersions, which are continuous familiesFx : TxS2 → R3 of injective homomorphisms parametrized by x ∈ S2.In view of the Gram-Schmidt orthogonalization process, we may as-sume that each Fx preserves the lengths of vectors and angles betweenthe vectors.
Let v denote the unit outward perpendicular vector field over the stan-dard unit sphere S2 in R3. Given a point x ∈ S2, note that any twoorthonormal vectors v1, v2 in TxS2 together with the vector v(x) form abasis of R3 at x. Therefore each Fx can be uniquely extended to a linearmap Fx : R3 → R3 in such a way that (Fxv1, Fxv2, Fxv) is the positive or-thonormal basis for R3. It follows, that the set of homotopy classes offormal immersions Fx is isomorphic to the set of homotopy classesof families Fx of rotations of R3. By taking x to Fx, the latter familydefines a continuous map S2 → SO3 to the space of rotations.
To summarise, we have shown that the set of regular homotopy classesof immersions S2 → R3 is isomorphic to π2(SO3) = 1. Thus, any twoimmersions of S2 to R3 are regularly homotopic. In particular, thestandard embedding f0 is regularly homotopic to the everted embed-ding f1.
99.2.4 Cobordisms of oriented immersed manifolds
The Compression Theorem suggests yet another geometric interpre-tation of stable homotopy groups of spheres. In this section we willbriefly describe the construction.
Let M be a manifold with a frame τ1, ..., τk representing an element inπm+kSk. By the Multicompression Theorem, we may assume that τi =
ei for i = 1, ..., k − 1. Let π : Rm+k → Rk denote the linear projectionwith kernel spanned by the vectors e1, ..., ek−1. Since at each pointx ∈ M the kernel of dxπ is normal to the manifold M, the projectionπ restricts to an immersion of M. Furthermore, the vector field v =
dπ(ek) is normal over an immersed manifold π(M) in Rm+1. For eachx ∈ M, by projecting the vector v(x) at π(x) to the perpendicular spaceπ∗(T⊥x M), we may assume that the vector field v is perpendicular overπ(M). We emphasize that the vector field v is a function M → Rm+1
associating to each point x in M a vector v(x) in Rm+1. In particular,at a double point π(x) = π(y) on the immersed manifold π(M) there

additional topics 183
19 The Pontryagin construction identifiesa map f : Sm+k → Sk with a framedmanifold M f of dimension m in Rm+k .We then compress M f to a framed im-mersed manifold π(M f ) in Rm+k anddeclare that h([ f ]) is the cobordism classof π(M f ). A priory, it may happen thatwhen we choose another representativeg in the class [ f ] of the homotopy groupπS
m, the Pontrjagin construction togetherwith the compression theorem could re-sult in a framed immersed manifoldπ(Mg) that is not cobordant to π(M f ).However, since g and f represent thesame element of πS
m, the Pontrjagin con-struction yields cobordant framed mani-folds Mg and M f , and, furthermore, thecobordism between Mg and M f can becompressed to a cobordism of immersedmanifolds π(Mg) and π(M f ). Thus, thehomomorphism h is well-defined.
are vectors v(x) and v(y) which may not coincide.
In general, an immersed manifold of dimension m in Rm+1 togetherwith a perpendicular vector field is said to be an oriented immersedmanifold. The cobordism group of oriented immersed manifolds isdefined similarly to the cobordism group of framed manifolds.
Theorem 99.10. The group πSm is isomorphic to the cobordism group of ori-
ented immersed manifolds Mm # Rm+1.
Proof. The Pontryagin construction together with the Multicompres-sion Theorem defines a homomorphism h of the stable homotopy groupπS
m to the cobordism group of framed immersed manifolds Mm inRm+1. The homomorphism h is well-defined since, as we have seen,cobordant framed embedded manifolds compress to framed immersedmanifolds.19
Let us show that the homomorphism h is surjective. Given a framedimmersed manifold Mm ∈ Rm+1, choose an integer k > m + 1, and liftthe immersed manifold M to an embedding of M into Rm+1 ×Rk−1.We will denote the embedded copy of M in Rm+k by M′. The normalframe vector of the immersed manifold M in Rm+1 lifts to a normalvector field v over M′. Let e1, ..., ek−1 be the standard basis vectors ofthe vertical (second) factor in Rm+1 ×Rk−1. Then e1, ..., ek−1, v forma frame of the embedded manifold M′. The Pontryagin constructionidentifies M′ with an element α of the stable homotopy group πS
m suchthat h(α) is represented by the framed immersed manifold M in Rm+1.Thus h is surjective. The injectivity of the homomorphism h is provedsimilarly.
Thus, by Theorem 99.10, the group πS0 is isomorphic to the cobordism
group of signed points in R, the group πS1 is isomorphic to the cobor-
dism group of oriented closed immersed curves in R2, while πS2 is
isomorphic to the cobordism group of oriented immersed surfaces inR3.
99.2.5 The Local Compression Theorem
In this section we complete the proof of the Local Compression Theo-rem. We will break the proof into three steps.

184 elements of surgery theory
Figure 99.12: Only near the downset Dthe vector field v is not vertical up (up-per figure). We can rotate each vectorv(x) in the plane 〈v(x), ek+m so that v(x)has positive last component and its an-gle with the horizontal plane is at leastµ (middle figure). Finally we can ex-tend v so that it is vertical up outside aδ-neighborhood U of M (lower figure).The isotopy Ft is one along the vectorfield v.
Figure 99.13: The isotopy Gt constructedby means of the Global CompressionTheorem may move points far. For ex-ample, consider a manifold M = R1 aswell as a vector field v on a vertical planeL ⊂ R3 as on Figure 99.13. The isotopyFt along v moves every point of L alongL. Furthermore, for x ∈ M the traceFtx stays below M. The point x also cannot escape a neighborhood of M sinceoutside a neighborhood of M the vectorfield v is vertical up. Thus x is forced tomove far up along the manifold M.
Case 1. Suppose that the downset D (as well as the horizontal set H) isempty. We have seen that in this case we can straighten up the vectorfield v by a deformation of the vector field v.
Case 2. Suppose now that the downset D is not empty, while thehorizontal set H is still empty. We will also assume that the vectorfield v is generic.
Lemma 99.11. Under the above conditions, D is a closed manifold.
Proof. Let x be a point on D, and O a neighborhood of x in M. Wemay use an exponential map exp : O×Dk → Rm+k to identify a neigh-borhood of O in Rm+k with O× Dk. Then a perpendicular vector v(y)at y ∈ O is a unit vector in y × Dk with a tip at Sk−1 = ∂Dk. Inother words, in view of the exponential map, essentially the vectorfield v over O is a function O → Sk−1. Furthermore, by appropriatelychoosing the exponential map, we may assume that the map O→ Sk−1
similarly defined by ψ is the constant map to the south pole ∞. Ifv is generic in the sense that the south pole ∞ is a regular value v,then D ∩O = v−1(∞) is a manifold. Clearly if y ∈ D, then y ∈ D sinceH is empty, i.e., D is a closed set in Rm+k.
First, we apply the argument in Case 1 to modify the vector field vso that it is vertical up everywhere except a small neighborhood ofD. Next, we follow the argument in the proof of the CompressionTheorem 2.1 and obtain an isotopy Ft, see Figure 99.12. The desiredisotopy is the isotopy Gt(x) = Ft(x)− tem+k of the relative compressiontheorem.
Lemma 99.12. By appropriately choosing all parameters in the construction,we may guarantee that the isotopy Gt is arbitrarily C0-small.
Before turning to the proof of Lemma 99.12, let’s observe that thestraightening isotopy Gt = Ft − tem+k constructed by means of of theGlobal Compression Theorem may move points far along the manifoldM since near the manifold M the vector field v may differ from em+k,see Figure 99.13. The isotopy Gt constructed by means of the LocalCompression Theorem moves points along M only for a short periodof time, as the vector field v differs from em+k only in a neighborhoodof a relatively small set D; compare the isotopy on Figure 99.13 withthat on Figure 99.12. This allows us to conclude that the latter isotopydoes not displace points of M much.

additional topics 185
20 In other words, the x1-direction on themanifold M is the direction of fastestgrowth of h. Since M has only finitelymany critical points, without loss of gen-erality we may assume that the gradientvector field of h is nowhere zero near D.
Proof. Let x be a point in D. Choose local coordinates near x so thatx1 is the coordinate along the gradient flow of the hight function hon M20, xM = (x2, ..., xm) are coordinates on M perpendicular to x1,xh = (xm+1, ..., xm+k−1) the horizontal coordinates perpendicular to M,and xm+k is the vertical coordinate.
The initial vector field v on M near x is tangent to the coordinatesurfaces L = (x1, xh, xm+k) since v is perpendicular to M. The de-formation of v(y) at the point y near x—constructed in the proof ofthe Global Compression Theorem—is performed in the vector spaceP = 〈v(y), em+k〉 which is in TyL. Then v is linearly extended over aneighborhood U of M. In particular, each extended vector is a linearcombination of v and em+k, i.e., we may still assume that the extendedvector field is tangent to coordinate surfaces L. This implies that eachpoint y ∈ M in a neighborhood of x flows over its coordinate surfaceL. Thus, at least for a short period of time each point y stays in L ∩Vfor a small neighborhood V of D outside of which v is vertical up.
Recall that h : M → R denotes the hight function on M. By choosingv generic, we may assume that each flow curve of the gradient vectorfield ∇h intersects D at a finite number of points. Then L intersects Dat finitely many points, and therefore the path components of L ∩ Vare of small diameter.
Now let us follow the trace of a point x ∈ M along the vector fieldv, i.e., we consider the trace of the point x under the isotopy Ft ratherthan the isotopy Gt. Since the vector field v is everywhere at leastslightly up, the path of the point x enters and exits the neighborhood Vfinitely many times. Outside V the path is vertical up. Such segmentsof the path of x correspond to stationary intervals of the trace of xunder the isotopy Gt. When the isotopy Ft brings the point x into theneighborhood V, the point x travels within a small path component ofL ∩ V untill it leaves V. This part of the trace of x corresponds to avery small displacement of x under the isotopy Gt. Therefore, indeed,the isotopy Gt displaces points of M slightly.
Case 3. Suppose now that the horizontal set H is not empty.
Exercise 99.13. Show that if H is not empty, then, without loss of gen-erality we may assume that the horizontal set H is a closed manifoldof dimension m− k, while the downset D is a manifold of dimensionm− k + 1 with ∂D = H.

186 elements of surgery theory
21 This intuitively obvious claim can berigorously proved by means of singu-larity theory. In fact, the set H is theset of singular points of the projectionp : M → Rm+k−1 to the horizontal plane,while the points at which ∇h is tangentto H is the set of singular points of p|H;the latter set is discrete in general.
22 This statement is known as theUniqueness of the Tubular Neighbor-hood Theorem.
The argument in Case 3 is only slightly different from the one in Case2. Let D denote a manifold obtained from D by attaching a thin collar∂D× [0, ε) to D inside M in such a way that D is a smooth manifold inM ⊂ Rm+k containing the manifold with boundary D. The union ofopen perpendicular discs of radius ε at points in D is a neighborhoodV of D. We may assume that the rotated and extended vector field vin the compression theorem is vertical up outside V.
As in Case 2, in a neighborhood of every point x ∈ M \ H near Dthere are coordinates (x1, xM, xh, xm+k) in Rm+k such that the isotopyof the Compression Theorem floats x along the coordinate surface L =
(x1, xh, xm+k). Its tangent space at x is generated by ∂/∂x1, ∂/∂xh and∂/∂xm+k. On the other hand, the vector ∂/∂x1 is a scalar multiple ofthe projection of ∂/∂xm+k to Tx M. Therefore the space TxL is generatedby ∂/∂x1 as well as T⊥x M. By continuity, the points x in H are alsofloated only in the directions in 〈∂/∂x1〉 ⊕ T⊥x M.
Without loss of generality we may assume that each flow curve of ∇hon M, i.e., each curve in the x1-direction, intersects H at finitely manypoints.21 Furthermore, we may assume that each flow curve of ∇hon M intersects D at finitely may points. Therefore each coordinatesurface L intersects D at finitely many points, which means that eachpath component of L ∩ V has small diameter. Since each point x ∈ Dfloating along L stays in V, this implies that x floats a small distance.By continuity, this is true for points in H as well, i.e., for all points inM.
99.2.6 Solutions to Exercises
Solution to Exercise 2.2. To begin with, let us show that any normal vec-tor field v over M is isotopic to a perpendicular vector field. To thisend, let w be the perpendicular vector field over M obtained fromv by projecting each vector v(x) to the perpendicular vector spaceT⊥x M. Let nx denote the vector subspace of T⊥x M perpendicular tothe vector space 〈w(x)〉 spanned by w(x), and put Vx = nx ⊕ 〈v(x)〉,Wx = nx ⊕ 〈w(x)〉. For sufficiently small ε > 0, let Vε
x denote the openε-disc in Vx centered at 0. Then the union Vε = ∪Vε
x is a neighborhoodof M, and each point in Vε corresponds to a uniquely defined pair(x, u) of a point x in M and a vector α in Vε
x . We may similarly definea neighborhood Wδ of M for a small real number δ > 0. Choose ε andδ so that ε δ. Then Vε ⊂ Wδ. There is an isotopy Ft of Vε in Wδ
which takes each disc Vεx into the corresponding disc Wδ
x .22 We will

additional topics 187
23 The proof of this intuitively obviousfact requires fibrations. Let G denote thetopological space of pairs (x, t, g) wherex ranges over points in M, t ∈ [0, 1] ,andg ranges over rotations of T⊥x M suchthat g(v0(x)) = vt(x). then the projec-tion (x, t, g) → (x, t) is a fibration G →M× [0, 1]. The inclusion M → M× 0into the base space of the fibration has anobvious lift x 7→ (x, 0, id), and therefore,the homotopy of inclusions M → M ×t lifts to a homotopy of maps M→ G.The last inclusion M → M× 1 lifts toa map x 7→ (x, 1, gx) which produces thedesired rotations gx of the fibers T⊥x M.
24 In other words, given a vector α in Vεx ,
first shrink it to the vector tα in Vεx , then
find its components (y(x, tα), β(x, tα)) inWδ, and finally shrink the vector β(x, tα)to 1
t β(x, tα) in Wδy .
discuss the construction of such an isotopy in a moment, but for nowassume that Ft has been constructed. Then the time dependent vectorfield of the isotopy Ft can be extended over all Rm+k and thus define adesired ambient isotopy that preserves M and takes the vector field vto a perpendicular one.
Now let us prove the statement of Exercise 2.2. We may now assumethat the vector fields v0 and v1 are perpendicular. Then the homotopyvt of the vector field v0 to v1 can be realized by a continuous rotation ofeach vector v0(x) to v1(x) in T⊥x M.23 We smooth the obtained isotopyof a neighborhood of Rm+k and extend it over all Rm+k. The resultingisotopy preserves M and takes the vector field v0 to the vector field v1,which completes the proof of the statement in Exercise 2.2.
Now let us prove the existence of the isotopy Ft of Vε in Wδ whichtakes each disc Vε
x to a disc in Wδx . Suppose that each point (x, α) in
Vε corresponds to a point (y(x, α), β(x, α)) in Wδ. Then we define anisotopy Ft of Vε by Ft(x, α) = (y(x, tα), 1
t β(x, tα)) for t ∈ (0, 1] andF0(x, α) = limt→0 Ft(x, α).24 It is not immediately clear that the map Ft
is a well-defined diffeomorphism onto image for all t. However, sinceβ(x, 0) = 0, by the Morse Lemma there is a function valued matrixA(x, α) such that β(x, α) = A(x, α)α. Therefore, for t ∈ (0, 1],
Ft(x, α) = (y(x, tα),1t
β(x, tα)) = (y(x, tα), A(x, α)α). (99.3)
The equation (99.3) gives a new definition of Ft valid for t ∈ [0, 1]; thenew definition agrees with the old one. On the other hand, the mapFt defined by (99.3) is a smooth map. Since we can similarly define amap from Ft(Vε) to Vε, the map Ft is a diffeomorphism.
Solution to Exercise 99.5. Since M is a smooth manifold in Rm+k of di-mension m, there is a diffeomorphism Ψ of a neighborhood V of theorigin in Rm+k into a neighborhood U ⊂ Rm+k of any prescribed pointx ∈ M such that Ψ−1(M ∩U) is the intersection of V and the coordi-nate plane Rm. Recall that the restriction ψ = Ψ|(V ∩Rm) is called acoordinate chart on M.
In order to show that W is a smooth manifold in Rm+k we need to con-struct maps Ψ that restrict to coordinate charts ψ on W. The domainof Ψ will be a small neighborhood V of V ∩Rm in Rm+k such that foreach point (x1, ..., xm+k) in V, the point (x1, ..., xm, 0, ..., 0) is in V ∩Rm.Let τm+1, ..., τs, with s = m + k− (n− 1) be vector fields over M ∩U at

188 elements of surgery theory
each point x ∈ M ∩U spanning the plane Hx. Put
Ψ(x1, ..., xm+k) = ψ(x1, ..., xm)
+ xm+1τm+1 + · · ·+ xsτs
+ xs+1e1 + · · · xs+n−1en−1.
Then Ψ−1(W) is the intersection of V and the coordinate plane Rs
of points (x1, ..., xs, 0, ..., 0). The restriction ψ of Ψ to the intersectionV ∩Rs is a coordinate chart on W. If ε is sufficiently small, then thecoordinate charts ψ constructed for all points x ∈ M cover the set W,and therefore the set W is a manifold.
By construction, the dimension of the manifold W is s = m + k− (n−1), while the vector fields e1, ..., en−1 over W are normal.
Solution to Exercise 99.13. The proof of this fact relies on considerationof Grassmann manifolds. We will only sketch the argument. TheGrassmann manifold Grk Rm+k is the space of vector subspaces ofdimension k in Rm+k. There is an obvious inclusion Grk Rm+k−1 →Grk Rm+k which associates an m-plane in the horizontal space the sameplane in the total space Rm+k. Consdier the Gauss map G : M →Grx Rm+k defined by x 7→ T⊥x M. The horizontal set H is preciselythe inverse image under G of the set Grm Rm+k−1. By the inverse func-tion theorem, this implies that H is a closed manifold of dimensionm− k provided that M ⊂ Rm+k is generic.
It is helpful to visualize the normal disc of Grm Rm+k−1 in Grx Rm+k.To this end, pick a horizontal vector space H representing a point inGrx Rm+k. Then any other planeHw in the normal disc is parametrizedby a vector w ∈ H. The plane Hw is spanned by w− |w|em+k and thesubspace in H perpendicular to w. In Hw the downmost vector isw − |w|em+k. The downmost vector maps to w under the projectionalong em+k from Hw to H.
Let x be a point in H, and let O be the perpendicular disc of H inM at x; it is of dimension k. Since the Gauss map G is generic, itmaps the disc O isomorphically onto a normal disc of Grk Rm+k−1 inGrk Rm+k. For each y in O the orthogonal projection T⊥y M → T⊥x M isan isomorphism. We may modify v so that under this isomorphismv(y) maps to a positive multiple of v(x) for all y. Then near H theset D consists of points y such that G(y) is the plane Hw where w is anon-negative multiple of v(x). Clearly, ∂D = H.

additional topics 189
Figure 99.14: The cobordism W withfour spherical surgeries.
Figure 99.15: Spherical surgeries of in-dex 1 that respectively decrease, in-crease, and does not change the numberof components of Wt.
25 In other words, a subset M of Rm+k issaid to be a locally flat topological manifoldof dimension m if for each point x ∈ Mthere is a coordinate neighborhood U ofx in Rm+k with continuous coordinates(x1, ..., xm+k) on U such that U ∩M is theset (x1, ..., xm, 0, ..., 0).
99.3 Topics for Chapter 3
99.3.1 Example: Cobordisms
Let us describe a cobordism W from an empty manifold to an emptymanifold with W diffeomorphic to a torus. The simplest cobordismW has four points p0, ..., p3 at which the tangent plane is horizontal.These are critical points of the height function f , see Figure 99.14.
When t < 0, the level Wt of the cobordism is empty. As t passescritical values of the height function, we observe modifications of Wt.At t = f (p0) a circle is born. Then, the level Wt splits into two circle,merges into one circle, and finally turns into an empty set at t = f (p3).
More precisely, at the time f (p0), the spherical surgery of index i = 0is performed on the empty level set W−ε. The surgery removes anempty handle hi from the empty level set and attaches a new handlehj = D0 × S1. Thus, after passing the critical level t = f (p0), the levelset Wt turns into a circle. At the time f (p1), the level set is undergoinga surgery of index i = 1. Two segments hi = S0 × D1 on the level setare replaced with two segments hj = D1× S0. The level set turns into apair of circles. At the time f (p2), another surgery of index i = 1 takesplace. Again a pair of segments hi on the level set is replaced withanother pair of segments hj. The resulting level set is a circle. Finally,at the time f (p3), the level set is undergoing a surgery of index i = 2.A handle hi = S1 × D0 is replaced with an empty handle hj. Thus, thelevel set Wt becomes empty.
Note that the spherical surgery both at the level f (p1) and at the levelf (p2) is of index 1. However, the former surgery results in increasingthe number of path components of Wt, while the latter results in de-creasing. It is also possible that the number of path components of Wt
does not change when a spherical surgery of index 1 is performed, seeFigure 99.15.
99.3.2 Cairns-Whitehead technique of smoothing manifolds
Recall that a smooth submanifold M of Rm+k is defined by means ofsmooth local charts Ψ. A locally flat topological manifold M is definedsimilarly, except that in its definition the local chart Ψ is only requiredto be continuous, not necessarily smooth. 25

190 elements of surgery theory
Figure 99.16: The standard mollifier η.
Figure 99.17: The mollifier ηε.
Figure 99.18: The function ηε(x− y)
26 Lipschitz functions f : R→ R are easyto visualize. These are functions whoserate of change | f (x) − f (y)|/|x − y| isbounded by a constant C.
In this section we will discuss a method of smoothing (locally flat)topological manifolds, i.e., approximating topological manifolds bytheir smooth counterparts. We will use standard mollifiers.
Standard mollifiers.
By definition, the standard mollifier on Rn is a smooth function η on Rn
with support in the unit ball |x| < 1, defined on the unit ball by η(x) =c exp 1
|x|2−1 , where c is the positive constant such that∫
Rn ηdx = 1, seeFigure 99.16. For each ε > 0, there is a closely related smooth functionηε(x) = 1
εn η( xε ) with support in the ε-ball |x| < ε. Still
∫Rn ηεdx = 1,
see Figure 99.16. Mollifiers ηε allow us to approximate any integrablefunction f on Rn by a smooth function, namely,
f ε(x) =∫
Rnηε(x− y) f (y)dy.
In fact, if the original function f is continuous, then the functions f ε
approach f uniformly on compact subsets of Rn as ε→ 0.
To make sense of the definition of the approximating function f ε, wenote that the function ηε(x− y) is trivial outside the set |x− y| < ε, seeFigure 99.18. Thus, for each point x, the integral in the definition off ε(x) is essentially taken over the disc |x− y| < ε of radius ε centeredat x. Furthermore, since
∫Rn ηεdx = 1, the value f ε(x) is the weighted
average of the values f (y) where y ranges over points in the ε-disccentered at x.
Lipschitz functions.
Another important ingredient needed here is the Lipschitz function.Given two open subsets U ⊂ Rm and V ⊂ Rn, a map f : U → V is saidto be Lipschitz if | f (x)− f (y)| ≤ C|x− y| for all x and y in U and forsome constant C that does not depend on x and y.26 In other words,a Lipschitz function may increase distances between points, but onlyby a bounded factor. In particular, every Lipschitz function is contin-uous. In fact, by the Rademacher theorem: Every Lipschitz functionf : U → Rm from an open subset U of Rn is differentiable almost ev-erywhere in U, i.e., f is differentiable in the complement to a set ofmeasure zero. The same is true for locally Lipschitz functions, i.e., func-tions f that are Lipschitz in sufficiently small neighborhood of eachpoint x of the domain. To visualize the non-differentiable behavior ofa Lipschitz function f , let Σ ⊂ U denote the set of measure zero in thecomplement to which the function f is differentiable. Then the graphof the restriction of f to U \ Σ is a differentiable manifold in Rm ×Rn,and, in particular, it has a tangent plane L at each point. Let now G

additional topics 191
27 The statement that M is locally thegraph of a Lipschitz function is equiv-alent to the following elementary as-sumption. Suppose that there is a neigh-borhood O of the points p in M, anda positive number γ < π/2 such thatfor any points p′, p′′ in the neighbor-hood O the angle between N and the linethrough the points p′, p′′ is at least γ.
Figure 99.19: A transverse plane N of di-mension k at a point x ∈ M satisfies thedefining property that near x the mani-fold M is the graph of a Lipschitz func-tion f : D → N on a small disc D of di-mension m centered at x and perpendic-ular to N.
denote the graph of the function f in Rm ×Rn. We have seen that inthe complement to f (Σ) it has a field of tangent planes L(z). It turnsout that if the plane field L(z) can be extended to a continuous planefield over G, then f is differentiable.
Let now M be a locally flat topological manifold of dimension m inRm+k. To smooth the manifold M near a point p, suppose that thereis an affine plane N ⊂ Rm+k of dimension k passing through the pointp such that for a small disc D of dimension m perpendicular to Nand centered at p, locally the manifold M is the graph of a Lipschitzfunction f : D → N.27 Then the graph of the mollified function f ε
near the point p is a smooth manifold Mp locally approximating themanifold M. The affine plane N in the local construction is called atransverse plane. Informally, it gives us a direction in which we mayperturb the manifold M to smooth it in a neighborhood of the point p.
We aim to turn this local construction into a global one. To this end,suppose that at each point p of M there is chosen a transverse planeN(p) continuously depending on p. Then we say that N is a transversefield over M.
Theorem 99.14 (Cairns-Whitehead). Given a transverse field over a com-pact topological manifold M in Rm+k, the manifold M is Lipeomorphic to anearby smooth submanifold in Rm+k.
We note that a transverse field over a manifold M may not exist. In-deed, Kervaire constructed a topological manifold of dimension 10,which can be placed in R21, and which admits no smoothing. Thus,the Kervaire manifold admits transverse fields only locally, not glob-ally.
On the other hand, the transverse field N determines the smoothing ofthe manifold M uniquely up to a diffeomorphism. Different transversefields may lead to smooth manifolds that are not diffeomorphic.
We will explain the idea behind the proof of Theorem 99.14 followingthe argument of Pugh.
Sketch of the proof. To begin with we extend the transverse field N overa neighborhood of M in Rm+k, and approximate the transverse fieldN by a smooth one. Its restriction to M is still a transverse field. Now,for each point p, choose a small δ-neighborhood Nδ(p) of p in theaffine plane N(p). If δ is small enough, then the discs Nδ(p) do not

192 elements of surgery theory
Figure 99.20: The sections σ in Σ sat-isfy the property that their graphs arefar from being vertical. Their graphs arewithin a cone −Sx ≤ y ≤ Sx, where xis the coordinate on D(p) and y is thecoordinate on N(p).
28 More precisely, a map σ : M → U is asection if the composition π : σ : M → Mis the identity map.
29 i.e., d(πε](σ1), πε
](σ2)) ≤ αd(σ1, σ2) forsome constant 0 < α < 1.
intersect for different p, and form a neighborhood U of M. There is aprojection π of U to the manifold M which projects each disc Nδ(p) tothe point p. Of course, the map π is not smooth (unless the manifoldM is smooth), but its mollified approximation πε : U → U is smooth.
In a neighborhood of each point p ∈ M, the set M is the graph of aLipschitz function fp : D(p)→ N(p) with Lipschitz constant C(p). LetS denote the supremum of all C(p) where p ranges over points in M.We say then that a set Y in U is almost horizontal, if for every pointy ∈ Y a neighborhood of y in Y is the graph of a Lipschitz functionD(p) → Nδ(p) with Lipschitz constant ≤ S. In particular, the set Mitself is almost horizontal in U.
We will perturb the manifold M by means of a section σ : M → U, i.e.,by means of a continuous map which displaces each point p withinthe disc Nδ(p).28 Let Σ denote the set of all sections σ which pro-duce almost horizontal displacements σ(M) of the manifold M, seeFigure 99.20. It is a complete metric space with metric
d(σ1, σ2) = supp∈M|σ1(p)− σ2(p)|.
Suppose that the approximation πε takes each section σ ∈ Σ to anothersection πε σ. In other word, the map πε defines a map πε
] : Σ → Σ.Then πε
] is a contraction in the sense that it decreases the distancesbetween sections29, and therefore, there is a unique fixed section σ0,i.e., a section σ0 that is sent to itself by πε
]. It can be shown that σ0(M)
is a differentiable submanifold approximating M, which completes theproof modulo two statements which we will discuss next in more de-tail.
First, we assumed that the approximation πε takes each section σ ∈ Σto another section πε σ. In general this is not true; some care isnecessary. Fix a point p0 in M and consider a cube neighborhoodD × Nδ about p0 where D = D(p0) and Nδ = Nδ(p0). Take a point(x, y) in the cube neighborhood, where x is the coordinate on D, and yis the coordinate on Nδ with (0, 0) corresponding to p0. We claim thatπε takes (x, y) to a point (x′, y′) such that
x′ = x + o(x, y), and y′ = f (x) + o(x, y),
where f : D → Nδ is a function whose graph is a neighborhood of p0
is M. Indeed, since the field of planes N is smooth, all planes in thefield are almost parallel to N(p0). Therefore
(x′, y′) = πε(x, y) = π(x, y) + o(x, y) = (x, f (x)) + o(x, y).

additional topics 193
30 If we write (x′1, y′1) = πε(x1, y1) and(x′2, y′2) = πε(x2, y2), then |y′2 − y′1| ≈| f (x2) − f (x1)| < S|x2 − x1| ≈ S|x′2 −x′1|.
31 It is not true that π(πε(σ(x))) =π(σ(x)) for x ∈ M as πε may compress asection vertically, as well as slightly shiftit horizontally.
32 We note that the restriction of πε toσ0 M is a homeomorphism, say g. Let Kdenote the set of points in σ0 M at whichσ0 M is non-differentiable. The set W isthe complement in σ0(M) to all the setsgiK of measure 0 for i ∈ Z.
33 The Whitney Smoothing Theorem forabstract manifolds (not necessarily sub-manifolds of Rm+k) asserts that the C1-atlas of every manifold contains a C∞-subatlas.
The formulas for x′ and y′ show that πε takes almost horizontal linesto almost horizontal lines.30 Since the plane field N is smooth (andtherefore nearly vertical in a neighborhood of p0), we deduce that in-deed πε takes sections σ to graphs of other sections.31 In other words,we define πε
](σ) to be the section that takes M to the set πε σ.
Second, we need to show that if σ0 is a fixed point of πε], then the
manifold σ0(M) is indeed smooth. To begin with σ0(M) is a Lipschitzmanifold, and therefore, by the Rademacher theorem it is differen-tiable almost everywhere. In fact, there is a subset W ⊂ σ0(M) of fullmeasure such that W consists of points at which σ0M is differentiableand πε|W : W → W is a homeomorphism.32 Let L(z) be the tangentplane field to σ0M over W. It remains to show that the plane field L(z)admits a continuous extension to a plane field over σ0(M).
To extend L(z) over σ0(M), let H denote the complete metric set ofall almost horizontal continuous plane fields over σ0(M). The map πε
acts on H and defines a contraction πε] :H → H. Therefore, there is
a unique plane field H such that πε(H) = H. Since H coincides withL(z) over W, it follows that H is a desired extension.
Thus the manifold σ0M is differentiable. It remains to show thatevery differentiable manifold M in Rm+k can be approximated by asmooth manifold. To begin with, by the Whitney Smoothing Theorem,there exists a smooth manifold M′ ⊂ Rm+k′ and a C1-homeomorphismg : M′ → M.33 We may regard g as a C1-embedding into Rm+k. Themollified approximation gε of g is a smooth map M′ → Rm+k. The firstpartial derivatives of gε are the corresponding mollified derivatives ofg. Since g is an immersion, this implies that gε is also an immersion.In particular, locally, in a neighborhood of each point, gε is an embed-ding. Therefore, if ε is sufficiently small, then gε is an embedding.

194 elements of surgery theory
34 Indeed, we need to show that for ev-ery linear function f : V → R there areunique vectors v and w such that f (x) =v · x = x · w for all x in V. Of course, itsuffices to require that the identities holdonly for the basis vectors ei . Thus, in or-der to verify f (x) = x ·w we need to findan element w such that
( f (e1), ..., f (en))t = (e1 · w, ..., en · w)t
On the left hand side we are given anarbitrary vector F, while on the right wehave a vector Bw. The equation F = Bwcan be solved for any vector F if and onlyif B has a right inverse, i.e., there is amatrix W such that I = BW. Similarly,an element v exists if and only if B hasa left inverse. We also note that B has aleft inverse if and only if B has a rightinverse.
99.4 Topics for Chapter 5
99.4.1 Bilinear forms on free modules
Let R be a commutative ring with 1. In our applications, we will onlyconsider rings Z, R, Q and Z2. Let V be a free finitely generated R-module with basis e1, ..., en, i.e., V consists of elements of the form
v = α1e1 + α2e2 + · · ·+ αnen,
where the coefficients α1, ..., αn are from the ring R; elements of Vcan be added, and scaled. Bilinear, symmetric, skew-symmetric, sym-plectic, and non-degenerate forms, as well as quadratic forms on themodule V are defined the same way as for vector spaces.
A bilinear form ϕ on the module V is completely determined by itsvalues ϕij = ϕ(ei, ej) on the basis vectors. In particular, all propertiesof the bilinear form ϕ can be reformulated in terms of the matrix B =
(ϕij). The form ϕ is symmetric, if its matrix is symmetric, i.e., B = Bt,where Bt stands for the transpose of the matrix B. The form ϕ is skew-symmetric if B = −Bt. Similarly, the form ϕ is symplectic, if B = −Bt,and all terms on the diagonal of Bt are trivial. Finally, the form ϕ isnon-degenerate if and only if B has an inverse.34

additional topics 195
35 Let ε denote a trivial vector bundleof dimension 1 over any space X. LetS ⊂ M denote the zero section of the vec-tor bundle E. Then E is the total spaceof the normal vector bundle ν of S in M.The isomorphism TM ⊕ T⊥M = εm+k
restricted over S produces
TS⊕ ν⊕ T⊥M = εm+k .
Since M is framed, we have T⊥M = εk .Also TS⊕ εk = εq+k . Finally, since ν is avector bundle of dimension q + 1 over amanifold of dimension q, and it is stablytrivial (i.e., ν ⊕ εq+k = εm+k), it followsthat ν is trivial.
99.5 Topics for Chapter 6
99.5.1 Heegaard splittings
Let P and Q be two manifolds with boundary ∂P and ∂Q. The bound-ary connected sum P#bQ of the manifolds P and Q is a manifold withboundary obtained from P t Q by attaching a 1-handle H1 along anattaching sphere S0 which consists of a point on P and a point on Q,and then smoothing the corners.
We call the boundary connected sum of g copies of the solid torusSq×Dq+1 a ball with g handles. For example, when q = 1, every surfaceof genus g in R3 bounds a ball with g handles.
Theorem 99.15. Let M be a (q− 1)-connected framed manifold of dimensionm = 2q + 1. Then there is a ball with g handles W such that M is diffeomor-phic to W ∪ϕ W, where ϕ is a diffeomorphism between the boundaries of thetwo copies of W.
Proof. Choose a handle decomposition of the manifold M. Since M is(q − 1)-connected we may choose a handle decomposition with only0, q, q+ 1 and m-handles. Let W denote the union of handles of indices0 and q, and W ′ the union of handles of indices q + 1 and m.
In particular, the manifold W is obtained from a disc H0 by attachinghandles Hq
i of index q along attaching spheres Sq−1 ⊂ ∂H0. Let gdenote the number of handles of index q. Since the dimension of thesphere ∂H0 is 2q, any set of g attaching spheres is isotopic to any otherset of g attaching spheres. For this reason we may choose any positionfor the attaching spheres of handles of index q. In particular, we mayrepresent the disc H0 as the boundary connected sum of g copies ofDq × Dq+1. We may assume that the attaching sphere of the handleHq
i is the sphere ∂Dq × 0 in the i-th summand of H0. Furthermore,we may assume that the handle Hq
i is attached along the thickening∂Dq × Dq+1 of the attaching sphere.
Next we note that the manifold obtained from Dq ×Dq+1 by attachingthe handle Hq
i = Dq×Dq+1 is the total space E of a vector bundle overSq. In fact, since M is framed, the space E is diffeomorphic to Sq ×Dq+1.35 Therefore, the manifold W is a ball with g handles. The sameargument shows that W ′ is a ball with g′ handles. Since ∂W coincideswith ∂W ′ we conclude that g′ = g, and therefore W ′ is diffeomorphic

196 elements of surgery theory
to W.
99.5.2 Alternative proof of the surgery theorem for framed manifoldsof odd dimension
Let M be a closed (q − 1)-connected framed manifold of dimensionm = 2q + 1. We have seen that the manifold M is a union W ∪ϕ W ′
where W ≈ W ′ is a ball with g handles, and ϕ is a diffeomorphismidentifying the boundaries of W and W ′. Suppose that g is minimalin the sense that for any framed manifold M′ which is cobordant toM, and any handle decomposition of M′, the corresponding numberg′ for M′ is at least g. We will show then that M is a homotopy sphere.
To prove the claim, let us study the homomorphism ϕ∗ of homologygroups.
The homology group Hq(∂W) = Hq(#gSq × Sq) is a free abelian groupgenerated by meridian classes mi and longitude classes `i, where i =1, ..., g. We may choose the generators in such a way that mi · `i =
1. Similarly, the homology group Hq(∂W ′) is a free abelian groupgenerated by meridian classes m′i and longitude classes `′i such thatm′i · `′i = 1. Since the diffeomorphism ϕ identifies ∂W with ∂W ′ wemay actually assume that mi, `i and m′i, `′i are two bases of thegroup Hq(∂W). In particular, the classes m′i and `′i can be written aslinear combinations
m′j = ∑ aijmi + ∑ bij`i,
`′j = ∑ cijmi + ∑ dij`i.
If we multiply the first equation by `i, we get m′j · `i = aij. We similarlyfind that mi ·m′j = bij, `′j · `i = cij and mi · `′j = dij. It follows that thematrix of the differential ϕ∗ of the map ϕ : ∂W ′ → ∂W is given by[
aij cij
bij dij
]We aim to simplify the matrix. Recall that since the dimension of M is2q + 1, a framed surgery is possible along any embedded sphere in Mof dimension q. In particular, take the core S of a boundary connectedsummand Sq × Dq+1 in W. There exists a framed surgery of M alongS. Without loss of generality we may assume that the thickening of theattaching sphere S of the framed surgery is the connected summandSq × Dq+1; if necessary, we may reparametrize the connected sum-mand Sq × Dq+1 (this results in modifying the basis mi, `i). Then

additional topics 197
36 We have
b11 = m1 ·m′17→ (m1 ± 2`1) ·m′1= b11 ± (±2a11).
the framed surgery replaces the connected summand Sq × Dq+1 in Wwith a connected summand Dq+1 × Sq+1. Such a surgery results in achange of bases mi 7→ `i and `i 7→ ±mi. In other words, the i-th rowof the matrix [ϕ∗] is exchanged with the (g + i)-th row of the matrix[ϕ∗]. We may also change the parametrization of a connected sum-mand Sq × Dq+1 so that it still remains a thickening of the attachingsphere of a framed surgery. This corresponds to a homomorphismmi 7→ mi and `i 7→ `i + αmi where α is any even integer.
Another observation is that since m′1 · `′j = 1, we have ∑ ai1di1± bi1ci1 =
1, which we can state as the following lemma.
Lemma 99.16. The elements in the first column of the matrix [ϕ∗] are rela-tively prime.
Theorem 99.17. The manifold M is a homotopy sphere.
Proof. To begin with we observe that the meridian classes mi are rep-resented by the belt spheres of handles Hq
i , while the meridian classes
m′j are represented by the attaching spheres of handles Hq+1j . There-
fore, sliding handles, and renumbering the handles allows us to turnthe submatrix [bij] into a diagonal one. By Lemma 99.16, the numbersb11, a11, a12, ..., a1g are relatively prime.
Suppose now that |b11| < |a11|. Then we can perform a surgery alongthe first summand Sq × Dq+1 which results in switching a11 with b11.Thus we may assume that |b11| ≥ |a11|.
If |b11| > |a11| > 0, then we can reduce |b11| without changing allother numbers in the set b11, a11, a12, ..., a1g. Indeed, we can performa surgery on the first summand Sq × Dq+1 of W, which correspondsto m1 7→ `1 and `1 7→ m1, and then choose a reparametrization whichcorresponds to m1 7→ m1 and `1 7→ `1 ± 2m1, and then perform againa surgery along the first summand. The resulting map is
m1 7→ `1 7→ `1 ± 2m1 7→ m1 ± 2`1
and `1 7→ `1. Therefore the only term that is modified in the first col-umn is b11. Thus we can modify b11 by ±2a11,36 and, consequently, wecan make |b11| ≤ |a11|. If b11 = ±a11, then a11, ..., a1g are relativelyprime. Let’s perform a surgery on all summands Sq × Dq+1 of W.Then b11, ..., b1g become relatively prime. Therefore by handle slidesand renumeration we can get b11 = ±1. By the Handle CancellationLemma, a pair of handles in the handle decomposition of M can becancelled, which contradicts the choice of the handle decomposition.

198 elements of surgery theory
If a11 = 0, then we can perform a surgery along the first summandSq×Dq+1 which results in switching a11 with b11, and we again obtainthat a11, ..., a1g are relatively prime. Finally, if |b11| = |a11|, thena11, ..., a1g are already relatively prime.

additional topics 199
99.6 Topics for Chapter 14
99.6.1 The Whitehead torsion
Let W ⊂ Rm+k × [0, 1] be an h-cobordism between two manifolds M0
and M1. In particular, the manifolds M0, M1 as well as W have thesame fundamental group π. We may assume that the hight functionf is a Morse function, with critical points of each index ordered insome way. Choose a distinguished point ∗ in W, and for each criticalpoint p of f choose a path γp in W from the point ∗ to the criticalpoint p. If p is a critical point of index n, and q a critical point ofindex n− 1, then each intersection point of the attaching sphere of thehandle Hn corresponding to p with the belt sphere of the handle Hn−1
corresponding to q lies on a special trajectory γp,q from p to q alongthe gradient vector field of f . The incidence 〈p, q〉 is an element inZ[π] given by the linear combination ∑±γp ∗ γp,q ∗ γ−1
q , where γp,q
ranges over all special trajectories, and the sign for terms in the linearcombination is taken according to the orientations.
We will next define a complex of modules over Z[π] associated withthe h-cobordism W. To this end, let Cn denote a free Z[π]-modulewhose generators [p] are in bijective correspondence with critical pointsp of f of index n. The differential dn : Cn → Cn−1 is a homomorphismof Z[π]-modules. It takes [p] to ∑〈p, q〉[q]. The Z[π]-modules Cn to-gether with differentials dn form a chain complex
· · · → Cndn−→ Cn−1
dn−1−−→ Cn−2 → · · · .
We note that each Cn is a free Z[π]-module with an ordered set ofgenerators, there are only finitely many non-zero terms Cn, and thechain complex is acyclic, i.e., its homology groups are trivial. Handlerearrangements correspond to the following modifications of the chaincomplex:
• changing the order of generators of Cn (corresponds to reorderinghandles of index n),
• replacing one generator with the sum of the generator and a multi-ple of another generator (corresponds to handle slides),
• replacing a generator [q] with ±g[q] where g ∈ π (corresponds toreplacing γq with γq ∗ g−1 )
• replacing dn : Cn → Cn−1 with dn ⊗ id : Cn ⊕Z[π] → Cn−1 ⊕Z[π]
(corresponds to creating a pair of handles).

200 elements of surgery theory
We can study the cobordism W algebraically. To this end, considerthe set of all acyclic chain complexes of free Z[π]-modules Cn withordered sets of generators and such that only finitely many terms Cn
are non-zero. There is an operation on such chain complexes givenby term-wise sum operation. Furthermore, the above four modifica-tions of chain complexes is an equivalence relation. It turns out thatthe set of equivalence classes of chain complexes with term-wise sumoperation is a group Wh(π), called the Whitehead group. In particular,every h-cobordism W gives rise to an element τ(W) in the Whiteheadgroup of π = π1W. This element is called the Whitehead torsion of theh-cobordism W.
99.6.2 The s-cobordism theorem
By definition, an h-cobordism W is an s-cobordism if the Whiteheadtorsion τ(W) is trivial.
Theorem 99.18. An h-cobordism W of a manifold M of dimension m ≥ 1 istrivial if and only if it is an s-cobordism.
Sketch of the proof. Handle rearrangements of a handle decompositionof W do not change the Whitehead torsion τ(W). Therefore if W isa trivial h-cobordism, then τ(W) = 0. Suppose now that W is ans-cobordism. Let us show that W is a trivial cobordism.
To begin with since the inclusion of the manifold M into the cobordismmanifold W induces an isomorphism π0M→ π0W, we may pair all 0-handles of the cobordism W with some of the 1-handles that each pairis canceling. In other words, we may assume that W has no 0-handles.All 1-handles can be traded for 3-handles, and so on. Similarly, we mayflip the cobordism W up side down and repeat the argument. As aresult, we obtain a new handle decomposition of W with only handlesin the middle degrees q and q+ 1. Under these handle rearrangements,the chain complex turn into one with only non-trivial modules Cq andCq+1, i.e., the new chain complex is of the form
· · · → 0→ Cq+1dq+1−−→ Cq → 0→ · · · ,
where Cq+1 and Cq are free Z[π] modules with ordered bases. Sinceτ(W) = 0, there is a sequence of further modifications of the chaincomplex that turn dq+1 into the identity map. Each elementary mod-ification of the chain complex corresponds to a handle rearrangement

additional topics 201
37 For details, see Proposition 8.31 andTheorem 8.33 in the book Algebraic andGeometric Surgery by A. Ranicki.
of W. Therefore, there is a sequence of handle rearrangements, afterwhich the q and q + 1-handles of W are paired, and, hence, could becancelled.37
Exercise 99.19. Suppose that in an acyclic chain complex C∗ the mod-ules Ci = 0 for i < q. Show that trading q-handles for (q + 2)-handlescorresponds to replacing the chain complex
→ Cq+3 → Cq+2 → Cq+1 → Cq → 0
with the chain complex
→ Cq+3d′q+3−−→ Cq+2 ⊕ Cq
d′q+2−−→ Cq+1 → 0→ 0
where d′q+3 is the map (dq+3, 0), while the map d′q+2 is the sum of dq+2
and Γ : Cq → Cq+1, where Γ is a right inverse of dq+1. More generally,let Γ : C → C be a chain contraction. Then there is a sequence ofrearrangements of handles in the decomposition of W which turn thechain complex C into a chain complex of the form
· · · → 0→ Coddd+Γ−−→ Ceven → 0→ · · ·
where Codd = ⊕Cq+i with i ranging over all odd integers, while Ceven =
⊕Cq+j with j ranging over all even integers. Consequently, the groupWh(π) can be defined as a group of equivalence classes of matrices.

Bibliography
[BM51] A. L. Blakers and W. S. Massey, The homotopy groups of atriad. I, Ann. of Math., vol. 53 (1951),161-205.
[Bra69] W. Browder, The Kervaire invariant of framed manifolds andits generalization. Ann of Math. 90 (1969), 157-186.
[Br93] G. E. Bredon, Topology and geometry, Graduate texts in Math-ematics, Springer-Verlag New York Inc., 1993.
[Br72] W. Browder, Surgery on simply-connected manifolds. Ergeb-nisse der Mathematik und ihrer Grenzgebiete, Band 65.Springer-Verlag, New York-Heidelberg, 1972. ix+132 pp.
[Ca40] S. Cairns, Homeomorphisms between topological manifoldsand analytic manifolds. Ann. of Math. (2) 41 (1940), 796-808.
[Ce32] E. Cech, Höherdimensionale Homotopiegruppen, Verhandlun-gen des Internationalen Mathematikerkongress, Zürich, OrellFüssli.
[EM02] Y. Eliashberg, N. Mishachev, Introduction to the H-principle,American Mathematical Soc., 2002.
[FF16] A. Fomenko, D. Fuchs, Homotopical Topology, GraduatedTexts in Mathematics, Springer International Publishing AGSwitzerland, 2016.
[Fr38] H. Freudenthal, Über die Klassen der Sphärenabbildungen. I.Große Dimensionen, Compositio Mathematica, 5 (1938), 299-314.
[Gr86] M. Gromov, Partial differential relations, Springer, 1986.

BIBLIOGRAPHY 203
[Ha02] A. Hatcher, Algebraic topology. (English summary) Cam-bridge University Press, Cambridge, 2002. xii+544 pp.
[HHR16] M. A. Hill, M. J. Hopkins, D. C. Ravenel, On the nonexis-tence of elements of Kervaire invariant one. Ann. of Math. (2)184 (2016), no. 1, 1-262.
[Hi59] M.W. Hirsch, Immersions of manifolds, Trans. Amer. Math.Soc. 93 (1959), 242-276.
[Ho30] H. Hopf, Über die Abbildungen der dreidimensionalen Sphäreauf die Kugelfläche, Mathematische Annalen v. 104 (1930), 637
- 665.
[Hu35] W. Hurewicz. Beiträge zur Topologie der Deformationen.Nederl. Akad. Wetensch. Proc. Ser. A 38(1935), 112-119, 521-528; 39(1936), 117-126, 213-224.
[J54] I. James, On the iterated suspension, Quart. J. Math., OxfordSer. 2, 5 (1954), 1-10.
[Ke60] M. Kervaire, A manifold which does not admit any differen-tiable structure. Comment. Math. Helv. 34 (1960), 257-270.
[KM63] M. Kervaire, J. Milnor, Groups of homotopy spheres. I. Ann.of Math. (2) 77 (1963), 504-537.
[KS77] R. Kirby; L. Siebenmann, Foundational essays on topologicalmanifolds, smoothings, and triangulations. With notes by JohnMilnor and Michael Atiyah. Annals of Mathematics Studies,No. 88. Princeton University Press, Princeton, N.J.; Universityof Tokyo Press, Tokyo, 1977. vii+355 pp.
[Ko07] A. Kosinksi, Differential manifolds, Dover Publ., Inc., 2007.
[KS77] U. Koschorke, B. Sanderson, Geometric interpretations of thegeneralized Hopf invariant, Math. Scand. 41 (1977), 199-217.
[Lee13] John M. Lee, Introduction to Smooth Manifolds. Second edi-tion. Graduate Texts in Mathematics, 218. Springer, New York,2013. xvi+708 pp.
[Ly] David W. Lyons, An elementary introduction to the Hopf fibra-tion, nilesjohnson.net/hopf-articles/Lyons_Elem-intro-Hopf-

204 elements of surgery theory
fibration.pdf.
[Mi56] J. Milnor, On manifolds homeomorphic to the 7-sphere, Ann.of Math. (2) 64, 399–405 (1956).
[Mi59] J. Milnor, Differentiable manifolds which are homotopyspheres. Unpublished notes, 1959.
[Mi61] J. Milnor, A procedure for killing homotopy groups of differ-entiable manifolds, Proc. Sympos. Pure Math. 3, Amer. Math.Soc., Providence, Rhode Island, 1963.
[Mi65] J. Milnor, Lectures on the h-cobordism theorem. Notes by L.Siebenmann and J. Sondow. Princeton University Press, Prince-ton, N.J. 1965.
[MiSt74] J. Milnor, J. Stasheff, Characteristic classes, Annals of mathe-matical studies 76, Prinston university press, 1974.
[Mo25] M. Morse, Relations between the critical points of a real func-tion of n independent variables, Trans. Amer. Math. Soc. 27
(1925), 345-396.
[Moo96] J. Moore, Lecture Notes on Seiberg-Witten Invariants, Lec-ture Notes in Mathematics 1629, Springer-Verlag Berlin Hei-delberg, 1996.
[No66] S. P. Novikov. On manifolds with free abelian fundamentalgroup and their application. (Russian) Izv. Akad. Nauk SSSRSer. Mat. 30 (1966), 207-246.
[No66a] S. P. Novikov. Pontrjagin classes, the fundamental group andsome problems of stable algebra. 1968 Amer. Math. Soc. Trans-lations Ser. 2, Vol. 70: 31 Invited Addresses (8 in Abstract) atthe Internat. Congr. Math. (Moscow, 1966) pp. 172-179 Amer.Math. Soc., Providence, R.I.
[Po50] L. S. Pontryagin, Homotopy classification of the mappings ofan (n + 2)-dimensional sphere on an n-dimensional one. (Rus-sian) Doklady Akad. Nauk SSSR (N.S.) 70, (1950). 957?959.
[Po85] L. S. Pontryagin, Smooth manifolds and their applications inhomotopy theory. Third edition. "Nauka”, Moscow, 1985. 175
pp.

BIBLIOGRAPHY 205
[Pu02] Ch. Pugh, Smoothing a topological manifold. Topology Appl.124 (2002), no. 3, 487-503.
[RS01] C. Rourke, B. Sanderson, The compression theorem. I. Geom.Topol. 5 (2001), 399-429.
[RS01a] C. Rourke, B. Sanderson, The compression theorem. II. Di-rected embeddings. Geom. Topol. 5 (2001), 431-440.
[RS03] C. Rourke, B. Sanderson, The compression theorem. III. Appli-cations. Algebr. Geom. Topol. 3 (2003), 857-872.
[Sm58] S. Smale, A classification of immersions of the two-sphere,Trans. Amer. Math. Soc. 90 (1958), 281-290.
[Sm59] S. Smale, The classification of immersions of spheres in Eu-clidean spaces, Ann. Math. 69 (1959), 27-344.
[Sm60] S. Smale, The generalized Poincaré conjecture in higher di-mensions, Bull. Amer. Math. Soc. 66 (1960), 373-375.
[Wall62] C. T. C. Wall, Killing the middle homotopy groups of odd di-mensional manifolds. Trans. Amer. Math. Soc. 103 (1962), 421-433.
[Wall66] C. T. C. Wall. Surgery of non-simply-connected manifolds.Ann. of Math. (2) 84 (1966), 217-276.
[Wall70] C. T. C. Wall. Surgery on compact manifolds. Second edition.Edited and with a foreword by A. A. Ranicki. MathematicalSurveys and Monographs, 69. American Mathematical Society,Providence, RI, 1999. xvi+302 pp.
[Wa60] A. H. Wallace, Modifications and cobounding manifolds,Canad. J. Math. 12 (1960), 503-528.
[Wa62] A. H. Wallace, A geometric method in differential topology,Bull. Amer. Math. Soc. 68 (1962), 533-542.
[Wh35] H. Whitney, Differentiable manifolds in Euclidean space, Pro-ceedings of the National Academy of Sciences of the UnitedStates of America, Vol. 21, No. 7 (1935), pp. 462-464.
[Wh53] G. W. Whitehead, On the Freudenthal theorem, Ann. of Math.

206 elements of surgery theory
57, No. 2, (1953), 209-228.
[Wh61] J. H. Whitehead, Manifolds with transverse fields in eu-clidean space. Ann. of Math. (2) 73 (1961), 154-212.
[Wh78] G. W. Whitehead, Elements of homotopy theory, GraduateTexts in Mathematics, Springer-Verlag, New York, Hiedelberg,Berlin, 1978.