
Ejemplo D H Puma Version Imprimir 560
2
1 Robot Puma 560 θ 5 Asignación sistemática de sistemas de coordenadas z 0 z 1 z 2 x 0 y 0 y 1 x 1 θ 2 θ 3 θ 1 z 5 θ 4 θ 6 x 2 y 2 x 3 y 3 z 3 z 4 x 4 y 4 x 5 z 5 y 5 z 2 z 3 x 2 x 3
Transcript of Ejemplo D H Puma Version Imprimir 560
1
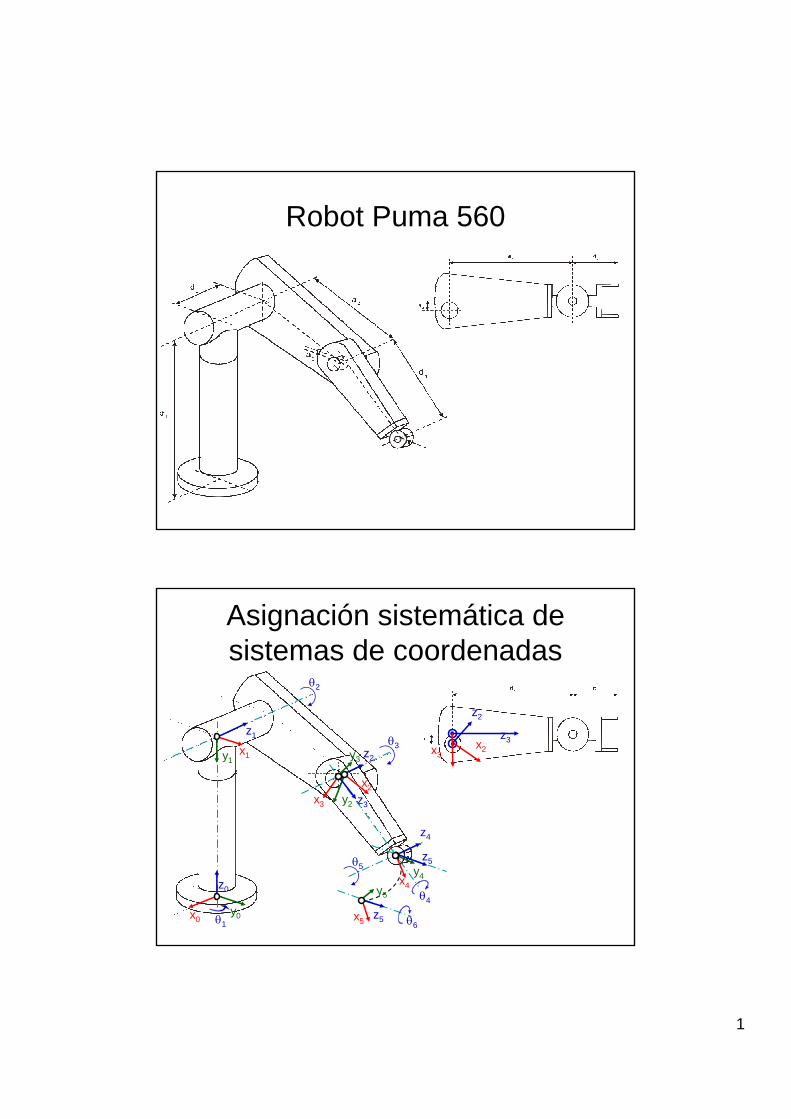
Robot Puma 560
θ5
Asignación sistemática de sistemas de coordenadas
z0
z1
z2
x0y0
y1x1
θ2
θ3
θ1
z5
θ4
θ6
x2y2x3
y3
z3
z4
x4y4
x5 z5
y5
z2
z3x2x3
2
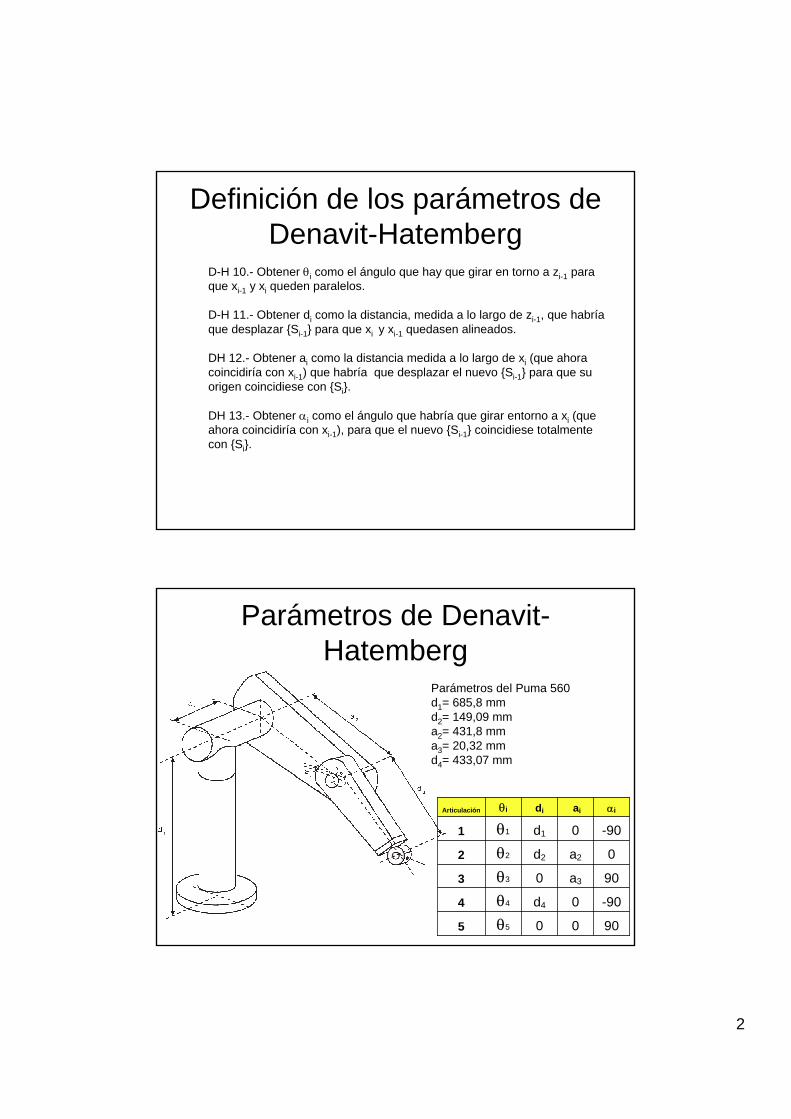
Definición de los parámetros de Denavit-Hatemberg
D-H 10.- Obtener θi como el ángulo que hay que girar en torno a zi-1 para que xi-1 y xi queden paralelos.
D-H 11.- Obtener di como la distancia, medida a lo largo de zi-1, que habría que desplazar {Si-1} para que xi y xi-1 quedasen alineados.
DH 12.- Obtener ai como la distancia medida a lo largo de xi (que ahora coincidiría con xi-1) que habría que desplazar el nuevo {Si-1} para que su origen coincidiese con {Si}.
DH 13.- Obtener αi como el ángulo que habría que girar entorno a xi (que ahora coincidiría con xi-1), para que el nuevo {Si-1} coincidiese totalmente con {Si}.
Parámetros de Denavit-Hatemberg
9000θ55
-900d4θ44
90a30θ33
0a2d2θ22
-900 d1θ11
αiaidiθiArticulación
Parámetros del Puma 560d1= 685,8 mmd2= 149,09 mma2= 431,8 mma3= 20,32 mmd4= 433,07 mm













![High Luminous Efficacy RGBA LED Emitter LZC-03MA07 430 100 320 lm Luminous Flux (@ I F = 1000mA) Φ V 475 560 130 410 lm Dominant Wavelength λ D 623 523 460 590 nm Viewing Angle [2]](https://static.fdocument.org/doc/165x107/5b360c4e7f8b9a5f288c3e74/high-luminous-efficacy-rgba-led-emitter-lzc-430-100-320-lm-luminous-flux-i-f.jpg)

![MODEL 560 + 562 - MD Techniek B.V. · MODEL 560 + 562 • 4 Weight units ... Protocols Modbus TM RTU, ASCII Baud Rates 150 ... (4 analog modules max.) I/O Relay Module[SBM] 8 Variations](https://static.fdocument.org/doc/165x107/5b7be4437f8b9a004b8da98f/model-560-562-md-techniek-bv-model-560-562-4-weight-units-protocols.jpg)

