Eigenvalue estimates for Dirac operators with torsion...
25
1 Eigenvalue estimates for Dirac operators with torsion II Prof. Dr. habil. Ilka Agricola Philipps-Universit¨ at Marburg Metz, March 2012
Transcript of Eigenvalue estimates for Dirac operators with torsion...

1
Eigenvalue estimates for Dirac operators with torsion II
Prof. Dr. habil. Ilka AgricolaPhilipps-Universitat Marburg
Metz, March 2012

1
Relations between different objects on a Riemannian manifold (Mn, g):
geometricstructures
curvature, contact str.,
almost complex str. . .
solutions offield eqs.
Ric = λ · g
Einstein eq., twistor eq.,
Killing eq., parallel tensor / spinor. . .
new invariant connection∇ and its holonomy
adapted connection,
Berger’s thm if ∇ = ∇g
Hol(M ;∇) ⊂ SO(n)
N.B. ∇g := Levi-Civita connection
– joint research project with Thomas Friedrich, HU Berlin –

2
Goal:
Investigate the spectrum of the Dirac operator of an adaptedconnection with torsion on a mnfd with special geometric structurethrough a suitable twistor equation!
Plan:
• Some special geometries
• Review of spectral estimates of the Riemannian Dirac operator andRiemannian twistor spinors
• Special geometries via connections with torsion
• The square of the Dirac operator with torsion
• Twistor spinors with torsion

3
Examples of special geometries
Example 1: almost Hermitian mnfd
• (S6, gcan): S6 ⊂ R7 has an almostcomplex structure J (J2 = −id)inherited from ”cross product” on R
7.
• J is not integrable, ∇gJ 6= 0
• Problem (Hopf): Does S6 admitan (integrable) complex structure ?
x TxS2
vJ(v) := x× v
S2
for S2 ⊂ R3:
J is an example of a nearly Kahler structure: ∇gXJ(X) = 0
More generally: (M2n, g, J) almost Hermitian mnfd:J almost complex structure, g a compatible Riemannian metric.
Fact: structure group G ⊂ U(n) ⊂ SO(2n), but Hol0(∇g) = SO(2n).
Examples: twistor spaces (CP3, F1,2) with their nK str., compact complex
mnfd with b1(M) odd (6 ∃ Kahler metric) . . .

4
Example 2 – contact mnfd
• (M2n+1, g, η) contact mnfd,η: 1-form (∼= vector field)
• 〈η〉⊥ admits an almost complexstructure J compatible with g
η
J = −∇gη
TxM
〈η〉⊥
• Contact condition: η ∧ (dη)n 6= 0 ⇒ ∇gη 6= 0, i. e. contact structuresare never integrable ! (no analogue on Berger’s list)
• structure group: G ⊂ U(n) ⊂ SO(2n+ 1)
Examples: S2n+1 = SU(n+1)SU(n) , V4,2 = SO(4)
SO(2), M11 = G2
Sp(1), M31 = F4
Sp(3)
Example 3 – Mnfds with G2- or Spin(7)-structure (dim = 7, 8)
• G2 has a 7-dimensional irred. representation,
• Spin(7) has a spin representation of dimension 23 = 8.
Examples: S7 = Spin(7)G2
, MAWk,l = SU(3)
U(1)k,l, V5,2 = SO(5)
SO(3), M8 = G2
SO(4). . .

5
The square of the Riemannian Dirac operator
(Mn, g): compact Riemannian spin mnfd, Σ: spin bdle
Classical Riemannian Dirac operator Dg:
Dfn : Dg : Γ(Σ) −→ Γ(Σ), Dgψ :=∑ni=1 ei · ∇g
eiψ
Properties:
• Dg is elliptic differential operator of first order, essentially self-adjointon L2(Σ), pure point spectrum
• Schrodinger (1932), Lichnerowicz (1962): (Dg)2 = ∆ + 14Scalg
∼ ”‘root of the Laplacian”’ for Scalg = 0

6
Review of Riemannian eigenvalue estimates
SL formula ⇒ EV of (Dg)2: λ ≥ 14 Scalgmin
• optimal only for spinors with 〈∆ψ, ψ〉 = ‖∇gψ‖2 = 0, i. e. parallelspinors, and then Scalgmin = 0
• no parallel spinors if Scalgmin > 0
Thm. Optimal EV estimate: λ ≥ n
4(n− 1)Scalgmin [Friedrich, 1980]
• ”=” if there exists a Killing spinor (KS) ψ: ∇gXψ = const ·X ·ψ ∀X
Link to special geometries:
Thm. ∃ KS ⇔ n = 5 : (M, g) is Sasaki-Einstein mnfd [∈ contact str.]
⇔ n = 6 : (M, g) nearly Kahler mnfd
⇔ n = 7 : (M, g) nearly parallel G2 mnfd
[Friedrich, Kath, Grunewald. . . ]

7
Friedrich’s inequality has two alternative proofs:
• by deforming the connection ∇gXψ ∇g
Xψ + cX · ψ
• by using twistor theory: the twistor or Penrose operator:
Pψ :=n
∑
k=1
ek ⊗[
∇gekψ +
1
nek ·Dgψ
]
satisfies the identity ‖Pψ‖2 + 1
n‖Dgψ‖2 = ‖∇gψ‖2
which, together with the SL formula, yields the integral formula
∫
M
〈(Dg)2ψ, ψ〉dM =n
n− 1
∫
M
‖Pψ‖2dM+n
4(n− 1)
∫
M
Scalg‖ψ‖2dM
and Friedrich’s inequality follows, with equality iff ψ is a twistor spinor,
Pψ = 0 ⇔ ∇gXψ +
1
nX ·Dgψ = 0 ∀X
Furthermore, ψ is automatically a Killing spinor.

8
Special geometries via connections with torsion
Given a mnfd Mn with G-structure (G ⊂ SO(n)), replace ∇g by ametric connection ∇ with torsion that preserves the geometric structure!
torsion: T (X,Y, Z) := g(∇XY −∇YX − [X,Y ], Z)
Special case: require T ∈ Λ3(Mn) (⇔ same geodesics as ∇g)
⇒ g(∇XY,Z) = g(∇gXY,Z) + 1
2 T (X,Y,Z)
1) representation theory yields
- a clear answer which G-structures admit such a connection; if existent,it’s unique and called the ‘characteristic connection’
- a classification scheme for G-structures with characteristic connection:Tx ∈ Λ3(TxM)
G= V1 ⊕ . . .⊕ Vp
2) Analytic tool: Dirac operator /D of the metricconnection with torsion T/3: ‘characteristic Dirac operator’
– generalizes Dolbeault operator and Kostant’s cubic Dirac operator

9
Some characteristic connections
Example 1 – contact mnfd [Friedrich, Ivanov 2000]
A large class admits a char. connection ∇, and Hol0(∇) ⊂ U(n) ⊂SO(2n+ 1). For Sasaki manifolds, the formula is particularly simple,
g(∇cXY,Z) = g(∇g
XY,Z) + 12η ∧ dη(X,Y,Z),
and ∇T = 0 holds. [Kowalski-Wegrzynowski, 1987 for Sasaki]
Example 2 – almost Hermitian 6-mnfd [Friedrich, Ivanov 2000]
(M,g, J), J almost complex, compatible with g
intrinsic torsion ∈ W(2)1 ⊕W(16)
2 ⊕W(12)3 ⊕W(6)
4 [Gray-Hervella, ’80]
∃ a char. connection ∇ ⇔ Nijenhuis tensor g(N(X,Y ), Z) ∈ Λ3(M),
⇔ intrinsic torsion ∈ W1 ⊕W3 ⊕W4
g(∇cXY,Z) := g(∇g
XY,Z) + 12 [g(N(X,Y ), Z) + dΩ(JX, JY, JZ)]

10
N.B. Non-integrable geometries are not necessarily homogeneous. Someof those who are homogeneous fall into the following class:
Example 3 – naturally reductive homogeneous space [IA 2003]
M = G/H reductive space, g = h ⊕ m, 〈, 〉 a scalar product on m.
The PFB G→ G/H induces a metric connection ∇ with torsion
T (X,Y,Z) := −〈[X,Y ]m, Z〉,
called the ‘canonical connection’.
Dfn. M = G/H is called naturally reductive if T ∈ Λ3(M); ∇ coincidesthen with the characteristic connection.
Naturally reductive spaces have the properties ∇T = ∇R = 0direct generalisation of symmetric spaces
Thm. On a compact naturally reductive space (6= Sn, Pn, simple Liegrp), the canonical connection is unique. [Olmos-Reggiani, 2008]

11
The square of the Dirac operator with torsion
With torsion:
(M,g): mnfd with G-structure and charact. connection ∇c, torsion T ,assume ∇cT = 0 (for convenience)
/D: Dirac operator of connection with torsion T/3
generalized SL formula: [IA-Friedrich, 2003]
/D2 = ∆T +1
4Scalg +
1
8||T ||2 − 1
4T 2
[1/3 rescaling: Slebarski (1987), Bismut (1989), Kostant, Goette (1999), IA (2002)]
Applications: 1) spectral properties of /D
2) Vanishing theorems
3) harmonic analysis on homog. non symmetric spaces
[Mehdi, Zierau]

12
(non integrable)
non
homog.
homog.
naturally reductive
Parthasarathy:Kostant:
Hermitianmnfds
Hermitian symm. spacesalmost Herm. nat. red.homogeneous spaces
Kähler mnfdsalmost Herm. mnfds(nearly/almost/quasi/semi K, Hermitian, loc.conf.K etc.)
symmetric
Dolbeault op. Dolbeault op.
SL: B/K/A−F/S:
almost
(integrable)T = 0 T 6= 0
(Dg)2 = Ω + 18Scal
/D2 = Ω + const
Dg = Dg 6= /D =
(Dg)2 = ∆ + 14Scalg /D2 = ∆T + 1
4Scalg + 18||T ||2 − 1
4T2

13
Spectrum of /D
For eigenvalue estimates, the action of T on the spinor bundle needs tobe known!
Thm. Assume ∇cT = 0 and let ΣM = ⊕µΣµ be the splitting of thespinor bundle into eigenspaces of T . Then:
a) ∇c preserves the splitting of Σ, i. e. ∇cΣµ ⊂ Σµ ∀µ,
b) /D2 T = T /D2, i. e. /D2Σµ ⊂ Σµ ∀µ. [IA-Fr. 2004]
⇒ Estimate on every subbundle of Σµ
Corollary (universal estimate). The first EV λ of /D2 satisfies
λ ≥ 1
4Scalgmin +
1
8‖T‖2 − 1
4max(µ2
1, . . . , µ2k),
where µ1, . . . , µk are the eigenvalues of T .
[Idea: neglect again 〈∆Tψ,ψ〉 = ‖∇cψ‖2 ≥ 0]

14
Universal estimate:
• follows from generalized SL formula
• does not yield Friedrich’s inequality for T → 0
• optimal iff ∃ a ∇c-parallel spinor:
This sometimes happens on mnfds with Scalgmin > 0 !
Results:
• deformation techniques: yield often estimates quadratic in Scalg,require subtle case by case discussion, often restriced curvature range
[IA, Friedrich, Kassuba [PhD], 2008]
• twistor techniques: estimates always linear in Scalg, no curvaturerestriction, rather universal, leads to a twistor eq. with torsion andsometimes to a Killing eq. with torsion
– submitted – [IA, Becker-Bender [PhD], Kim 2010-11]

15
Twistors with torsion
m : TM ⊗ ΣM → ΣM : Clifford multiplication
p = projection on kerm: p(X ⊗ ψ) = X ⊗ ψ + 1n
∑ni=1 ei ⊗ eiXψ
∇s: ∇sXY := ∇g
XY + 2sT (X,Y,−)
(s = 1/4 is the ”standard” normalisation, ∇1/4 = char. conn.)
twistor operator: P s = p ∇s
Fundamental relation: ‖P sψ‖2 + 1n‖Dsψ‖2 = ‖∇sψ‖2
ψ is called s-twistor spinor ⇔ ψ ∈ kerP s ⇔ ∇sXψ + 1
nXDsψ = 0.
A priori, not clear what the right value of s might be:
different scaling in ∇[
s = 14
]
and /D[
s = 14·3
]
!
Idea: Use possible improvements of an eigenvalue estimate as a guideto the ‘right’ twistor spinor

16
Thm (twistor integral formula). Any spinor ϕ satisfies∫
M
〈/D2ϕ,ϕ〉dM =n
n− 1
∫
M
‖P sϕ‖2dM +n
4(n− 1)
∫
M
Scalg‖ϕ‖2dM
+n(n− 5)
8(n− 3)2‖T‖2
∫
‖ϕ‖2dM − n(n− 4)
4(n− 3)2
∫
M
〈T 2ϕ,ϕ〉dM,
where s = n−14(n−3).
Thm (twistor estimate). The first EV λ of /D2 satisfies (n > 3)
λ ≥ n
4(n− 1)Scalgmin +
n(n− 5)
8(n− 3)2‖T‖2 − n(n− 4)
4(n− 3)2max(µ2
1, . . . , µ2k),
where µ1, . . . , µk are the eigenvalues of T , and ”=” iff
• Scalg is constant,
• ψ is a twistor spinor for sn = n−14(n−3),
• ψ lies in Σµ corresponding to the largest eigenvalue of T 2.

17
• reduces to Friedrich’s estimate for T → 0
• estimate is good for Scalgmin dominant (compared to ‖T‖2)
Ex. (M6, g) of class W3 (”balanced”), Stab(T ) abelian
Known: µ = 0,±√
2‖T‖, no ∇c-parallel spinors
twistor estimate: λ ≥ 3
10Scalgmin −
7
12‖T‖2
universal estimate: λ ≥ 1
4Scalgmin −
3
8‖T‖2
• better than anything obtained by deformation
On the other hand:
Ex. (M5, g) Sasaki: deformation technique yielded better estimates.

18
Twistor and Killing spinors with torsion
Thm (twistor eq). ψ is an sn-twistor spinor (P snψ = 0) iff
∇cXψ +
1
nX · /Dψ +
1
2(n− 3)(X ∧ T ) · ψ = 0,
Dfn. ψ is a Killing spinor with torsion if ∇snXψ = κX ·ψ for sn = n−1
4(n−3).
⇔ ∇cψ −[
κ+µ
2(n− 3)
]
X · ψ +1
2(n− 3)(X ∧ T )ψ = 0.
In particular:
• ψ is a twistor spinor with torsion for the same value sn
• κ satisfies the quadratic eq.
n
[
κ+µ
2(n− 3)
]2
=1
4(n− 1)Scalg +
n− 5
8(n− 3)2‖T‖2 − n− 4
4(n− 3)2µ2
• Scalg = constant.

19
In general, this twistor equation cannot be reduced to a Killing equation.
. . . with one exception: n = 6
Thm. Assume ψ is a s6-twistor spinor for some µ 6= 0. Then:
• ψ is a /D eigenspinor with eigenvalue
/Dψ =1
3
[
µ− 4‖T‖2
µ
]
ψ
• the twistor equation for s6 is equivalent to the Killing equation∇sψ = λX · ψ for the same value of s.
Observation:
The Riemannian Killing / twistor eq. and their analogue with torsionbehave very differently depending on the geometry!

20
Integrability conditions & Einstein-Sasaki manifolds
Thm (curvature in spin bundle). For any spinor field ψ:
Ricc(X) · ψ = −2n
∑
k=1
ekRc(X, ek)ψ +1
2X dT · ψ.
Thm (integrability condition). Let ψ be a Killing spinor with torsionwith Killing number κ, set λ := 1
2(n−3). Then ∀X :
Ricc(X)ψ = −16sκ(X T )ψ + 4(n− 1)κ2Xψ + (1 − 12λ2)(X σT )ψ +
+2(2λ2 + λ)∑
ek(T (X, ek) T )ψ .
Cor. A 5-dimensional Einstein-Sasaki mnfd with its characteristicconnection cannot have Killing spinors with torsion.

21
Killing spinors on nearly Kahler manifolds
• (M6, g, J) 6-dimensional nearly Kahler manifold
- ∇c its characteristic connection, torsion is parallel
- Einstein, ‖T‖2 = 215Scalg
- T has EV µ = 0,±2‖T‖- ∃ 2 Riemannian KS ϕ± ∈ Σ±2‖T‖, ∇c-parallel
- univ. estimate = twistor estimate, λ ≥ 215Scalg
Thm. The following classes of spinors coincide:
• Riemannian Killing spinors • ∇c-parallel spinors
• Killing spinors with torsion • Twistor spinors with torsion
There is exactly one such spinor ϕ± in each of the subbundles Σ±2‖T‖.

22
A 5-dimensional example with Killing spinors withtorsion
• 5-dimensional Stiefel manifold M = SO(4)/SO(2), so(4) = so(2)⊕m
• Jensen metric: m = m4 ⊕ m1 (irred. components of isotropy rep.),
〈(X, a), (Y, b)〉t = 12β(X,Y ) + 2t · ab, t > 0, β = Killing form
∣
∣
m4
• t = 1/2: undeformed metric: 2 parallel spinors
• t = 2/3: Einstein-Sasaki with 2 Riemannian Killing spinors
• For general t: metric contact structure in direction m1 withcharacteristic connection ∇ satisfying ∇T = 0
• ‖T‖2 = 4t, Scalg = 8 − 2t, Ricg = diag(2 − t, 2 − t, 2 − t, 2 − t, 2t).
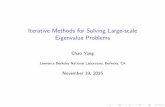
• Universal estimate: λ ≥ 2(1 − t) =: βuniv
• Twistor estimate: λ ≥ 52 − 25
8 t =: βtw

23
4/9
EV
βuniv
βtw
t
Result: there exist 2 twistor spinors with torsion for t = 2/5, and theseare even Killing spinors with torsion.

24
Generalisation: deformed Sasaki mnfds with Killingspinors with torsion
• (M, g, ξ, η): Sasaki mnfd, η: contact form, dimension 2n+ 1
• Tanno deformation of metrics: gt := tg + (t2 − t)η ⊗ η, again Sasakiwith ξt = 1
tξ, ηt = tη (t ∈ R∗)
• If Einstein-Sasaki: admits two Riemannian Killing spinors
Thm. Let (M, g, ξ, η) be Einstein-Sasaki, gt the Tanno deformation.Then there exists a t s.t. (M, gt, ξt, ηt) has two Killing spinors withtorsion.
– establishes existence of examples in all odd dimensions –