Effective Route Guidance in Traffic Networks · C(f ) = 104 but fair! 51 51 1 1 1 2 100 c a =1 c...
14
c Outline • Route Guidance; User Optimum; Capacities. • Constrained c 1 • G =( ) k demands (o i ,d i ) r i • f P . • t a (·) → and → L • C (f ) := � a∈A t a (f a )f a 2x x +1 2 2 2 2 1 0 0 0 0 2 2 2 · 4+ 2 · c 2 UE unique UE UE/SO ≥ α(L) UE/SO UE/SO ≤ α(L) BUE/SO ≤ α(L) c 3 Effective Route Guidance in Traffic Networks Lectures developed by Andreas S. Schulz and Nicol´ as Stier May 13, 2004 2004 Massachusetts Institute of Technology Lecture 1 Equilibrium; System User Equilibria in Networks with Lecture 2 System Optimum; Dantzig-Wolfe Decomposition; Constrained Shortest Paths; Computational Results. 2004 Massachusetts Institute of Technology Review of Traffic Model Directed graph V,A with capacities, with rate Flows on paths Can be non-integral. Traversal times: latency functions continuous nondecreasing belong to a given set (e.g. linear) The total travel time of a flow is: 1 = 10 2004 Massachusetts Institute of Technology Review of First Lecture No capacities With capacities Set of may be non-convex unbounded 2004 Massachusetts Institute of Technology
Transcript of Effective Route Guidance in Traffic Networks · C(f ) = 104 but fair! 51 51 1 1 1 2 100 c a =1 c...

c©
Outline
•
Route Guidance; User
Optimum;
Capacities.
•
Constrained
c© 1
• G = ( )k demands (oi, di) ri
• fP .
• ta(·) → and → L
•
C(f) := �
a∈A
ta(fa)fa
2x x + 1
2
2
2
2
1
0 0
00
2 2
2 · 4 + 2 ·
c© 2
UE unique UE
UE/SO ≥ α(L) UE/SO
UE/SO ≤ α(L) BUE/SO ≤ α(L)
c© 3
Effective Route Guidance in Traffic Networks
Lectures developed by Andreas S. Schulz and Nicolas Stier
May 13, 2004
2004 Massachusetts Institute of Technology
Lecture 1
Equilibrium; System
User Equilibria in Networks with
Lecture 2
System Optimum; Dantzig-Wolfe
Decomposition; Constrained Shortest Paths;
Computational Results.
2004 Massachusetts Institute of Technology
Review of Traffic Model
Directed graph V,A with capacities, with rate
Flows on paths Can be non-integral.
Traversal times: latency functions continuous nondecreasing belong to a given set (e.g. linear)
The total travel time of a flow is:
1 = 10
2004 Massachusetts Institute of Technology
Review of First Lecture
No capacities With capacities
Set of
may be non-convex
unbounded
2004 Massachusetts Institute of Technology

optimize optimize system
c© 4
SO
51
51
1 1
1 22
100
ca = 1
ca = 1
c© 5
SO
SO C(SO) = . Unfair!
51
51
1 1
1 22
100
ca = 1
ca = 1
c© 6
SO
C(f ) = 104 but fair!
51
51
1 1
1 22
100
ca = 1
ca = 1
c© 7
selfish users central planner the goal own travel time welfare
fair, not efficient efficient, not fair fair, efficient
2004 Massachusetts Institute of Technology
Long Detours in
Instance with constant latencies:
2004 Massachusetts Institute of Technology
Long Detours in
routes 1 unit along each path: 100 + 3
2004 Massachusetts Institute of Technology
Long Detours in
Compare to routing 1 unit along the other paths:
2004 Massachusetts Institute of Technology

Constrained
c© Constrained 8
• SO cannot due to unfairness
• UE
Use instead!
• CSO = min total
c© Constrained 9
c© 10
•
•
• UE
Notation:
• �a
• �P = �
a∈P
�a
c© Constrained 11
System Optimum
2004 Massachusetts Institute of Technology System Optimum
Route Guidance
be implemented in practice
does not take into account the global welfare
constrained SO
travel time s.t. demand satisfied
users are assigned to “fair” routes capacity constraints
2004 Massachusetts Institute of Technology System Optimum
Technological Requirements
exact knowledge of the current position
2-way communication to a main server
2004 Massachusetts Institute of Technology Constrained System Optimum
Constrained SO: Normal Lengths
Normal lengths: a-priori belief of network
Geographic distances
Free-flow travel times (times in empty network)
Travel times under
normal length of arc:
normal length of path:
2004 Massachusetts Institute of Technology System Optimum

Constrained SO: Definition
• Fix a tolerance ε ≥ 0
• A path P ∈ Pi is valid if �P ≤ (1 + ε) × min Q∈Pi�Q
• Definition:
CSOε = min total travel time
s.t.�
P∈Pi:P valid
fP =ri for all i
�
P�a
fP ≤ca for a ∈ A
fP ≥0
c©2004 Massachusetts Institute of Technology Constrained System Optimum 12
CSO Example
SO CSO
c©2004 Massachusetts Institute of Technology Constrained System Optimum 13
Remarks about CSO
• It is a non-linear, convex, minimization problem over a polytope
(constrained min-cost multi-commodity flow problem)
• We solve it using the Frank-Wolfe algorithm:
we solve a sequence of linear programs
• No need to consider all path variables simultaneously:
we use column generation
c©2004 Massachusetts Institute of Technology Constrained System Optimum 14
Computing CSO
• Each algorithm uses the next as a subroutine:
1. Frank-Wolfe algorithm: linearize using current gradient
2. Simplex algorithm to solve resulting LP
3. Column generation to handle exponentially many paths
4. Constrained Shortest Path Problem (CSPP) algorithm for pricing
5. Dijkstra’s algorithm as a routine for CSPP
c©2004 Massachusetts Institute of Technology Constrained System Optimum 15

0. x0 k = 0 and LB = −∞.
1. UB = C(xk) and x = xk .
2. z ∗ = min{C(x) + ∇C(x)T (x − x) : x feasible }. Let x ∗
3. xk+1 = x+α(x ∗ −x).
4. LB { ∗}.
5. |UB −LB| ≤ tolerance, STOP! k = k + 1
c© 16
• Let ta = ∂C(f i) ∂fa
fa
• subset P ′⊆ P of :
min�
a∈A
ta fa
s.t.�
P �a
fP = fa a ∈ A
�
valid P ∈P ′ i
fP = ri i = 1, . . . , k (1)
fa ≤ ca a ∈ A (2)
fP ≥ 0 P ∈ P ′
c© Constrained 17
• i σi
• a πa ≥ 0
• ⇔ �
a∈P
(ta + πa) ≥ σi ∀ valid P ∈ Pi
• :
i Pi
σi
” !
c© 18
σi and πa the optimal solution
i: Pi in Pi ta + πa �
a∈Pi(ta + πa) ≥ σi i
5.
7. P ′
8. Pi with �
a∈Pi(ta + πa) < σi to P ′
9.
c© Constrained 19
Frank-Wolfe Algorithm
Initialization: start with flow . Set
Update upper bound: set
Compute next iterate:
be the optimal flow.
Solve the line-search problem and set
Update lower bound: set = max LB, z
Check stopping criteria: if Otherwise, set and go to step 1.
2004 Massachusetts Institute of Technology Constrained System Optimum
Linear Problem and Column Generation
be the objective coefficient of in the LP
As there are exponentially many paths in the LP, we form LP’ with a valid paths
for all
for all
for all
for all
2004 Massachusetts Institute of Technology System Optimum
Linear Problem and Column Generation II
For each demand , let be the dual variable corresponding to (1)
For each arc , let be the dual variable corresponding to (2)
Solution optimal in LP
The Pricing Problem
For every commodity , either find a valid path in with modified cost less than or assert that no such path exists.
Can be solved as a “Constrained Shortest Path Problem
2004 Massachusetts Institute of Technology Constrained System Optimum
Algorithm for Solving the LP
1. Solve the linear program LP’
2. Let be simplex multipliers of the current
3. for all find shortest valid path w.r.t. arc costs
4. if for all
Solution is optimal for LP. STOP
6. else
Remove one or more non-basic variables from
Add at least one path
goto 1
2004 Massachusetts Institute of Technology System Optimum

• as many new to
⇒ Add all
⇒
•
one
c© 20
4.
5. Dijkstra
c© Constrained 21
c© 22
• : let d(j) j ∈ A
• For j ∈ A d∗(j) from 1 to j
•
– – Let T = { } ⇒ d(j) ≥ d∗(j) ∀j ∈ T
– is – Let S = { } ⇒ d(j) = d∗(j) ∀j ∈ S
c© 23
Observations for Solving the LP
Empirically, very advantageous to add columns restricted master problem as possible
paths that price favorably until we run out of space
Non-basic variables removed when their slots are needed for new candidate paths
We observed a reduction in computation time by factors of about 50, compared to always adding a single column and removing another
2004 Massachusetts Institute of Technology Constrained System Optimum
The Pricing Problem
1. Frank-Wolfe algorithm: linearize using current gradient
2. Simplex algorithm to solve resulting LP
3. Column generation to handle exponentially many paths
Constrained Shortest Path Problem (CSPP) algorithm for pricing
’s algorithm as a routine for CSPP
2004 Massachusetts Institute of Technology System Optimum
Shortest Path Problem
2004 Massachusetts Institute of Technology Shortest Path Problem
Distance Labels
We want the shortest paths from node 1 to all other nodes
Throughout the run, nodes will have distance labels
denote the label of
, let denote the shortest distance
Labels can be :
Temporary: shortest distance found so far temporarily labeled nodes
Permanent: when the label the shortest distance permanently labeled nodes
2004 Massachusetts Institute of Technology Shortest Path Problem

d
d(j) ≤ d(i) + tij ∀ ( ) ∈ A
0
1
2
3
4
5
6
2
4
2 1
3
4
2
3
2
2
3 4
6
6
c© 24
d(i) i, (i) i
(i)
( ) ∈ A do if d(j) > d(i) + tij then
d(j) := d(i) + tij ; (j) := i;
10 i
j
2
4
j
15 12
13
c© 25
1
S := {1}; T := V \ {1}; d ; d(j) := ∞ j = 2, 3, . . . , n;
1); while S �= V do
i := { d(j) : j ∈ T }; S := S ∪ {i}; T := T \ {i};
i);
c© 26 c© 27
Optimality Conditions
The distance labels are shortest path distances iff
i, j
2004 Massachusetts Institute of Technology Shortest Path Problem
Dijkstra’s Algorithm: Update
Given a label for node Update
improves the labels of ’s neighbors:
Procedure Update
for each i, j
pred
2004 Massachusetts Institute of Technology Shortest Path Problem
Dijkstra’s Algorithm: Main
This routine computes shortest paths from node to all other nodes:
(1) := 0 for update(
// find minimum temporary labeled node and update it argmin
update(
2004 Massachusetts Institute of Technology Shortest Path Problem
Shortest Path Example
2004 Massachusetts Institute of Technology Shortest Path Example

Constrained
c© 28
1 to 6 (tij, �ij)
(1,10)
(1,1)
(1,7)(2,3)
(10,3)
(12,3)
(2,2)
(1,2) (10,1) (5,7)
1
2 4
53
6
i j
c© 29
• d(j) d(j) = (dt(j), d�(j))
– dt(j)– d�(j) 1 to j
•
• d(j) dominates d′(j) iff dt(j) ≤ d′ t(j) and d�(j) ≤ d′
�(j).
• j T (j) of S(j) of
• Let T and S and
c© 30
Given a d(i) i, the i’s
i d(i))
if dt(i) ≥ 1 to n return;
( ) ∈ A do dnew(j) := d(i) + (tij , �ij ); j if dnew
� (j) ≤ L and dnew j add dnew to T (j);
T (j);
c© 31
Shortest Path
2004 Massachusetts Institute of Technology Constrained Shortest Path
Constrained Shortest Path Example
Find the fastest path from node node with a length of at most 10
2004 Massachusetts Institute of Technology Constrained Shortest Path
Labels
A label is now a tuple
is the travel time the length of a path from node
A node may have several labels at the same time
A label
In the algorithm, every node has a set temporary labels and a set permanent labels
be the sets of all temporary permanent labels, resp.
2004 Massachusetts Institute of Technology Constrained Shortest Path
Update
label for node Update improves labels of neighbors:
Procedure Update(node , label
min. time of a feasible path from node so far
for each i, j
// new label for is not dominated by other labels in
delete dominated labels from
2004 Massachusetts Institute of Technology Constrained Shortest Path

1 n �(path) ≤ L:
S {(0, 0)}; 1, (0, 0));
while S(n) l l
d := { dt : d ∈ T }; i :=
d from T (i) to S(i); i, d);
enumeration
c© 32
Constrained
c© 33
Idea:
c© 34
CSOε = min total
s.t. �
P ∈Pi:P valid
fP =ri i
�
P �a
fP ≤ca a ∈ A
fP ≥0
• ⇒ C(f ) = ∞
•
• → !
CSO
c© 35
Labeling Algorithm
This routine computes a fastest path from node to node such that
(1) := update(
is empty do // find minimum temporary abe ed node
argmin corresponding node;
move the label update(
This can degenerate into a huge
2004 Massachusetts Institute of Technology Constrained Shortest Path
Shortest Path Example
2004 Massachusetts Institute of Technology
Alternative Algorithm for CMCFP
Forget about Capacity Constraints
1. Frank-Wolfe algorithm: linearize using current gradient
2. Simplex algorithm to solve resulting LP
3. Column generation to handle exponentially many paths
4. Constrained Shortest Path Problem (CSPP) algorithm for pricing
5. Dijkstra’s algorithm as a routine for CSPP
2004 Massachusetts Institute of Technology
Relaxing Capacity Constraints
travel time
for all
for
Capacity constraint violated because latency is infinity
Minimization takes care of making the solution feasible
No capacity constraints the problem is separable
can be found with a sequence of CSPP
2004 Massachusetts Institute of Technology

Computational Experience
c©2004 Massachusetts Institute of Technology Computational Experience 36
Computational Experiments
We used real-world instances obtained from DaimlerChrysler (Berlin)
and from the Transportation Network Test Problems website:http://www.bgu.ac.il/~bargera/tntp/
Instance Name |V | |A| |K| |A| · |K|Sioux Falls 24 76 528 40K
Friedrichshain 224 523 506 265K
Winnipeg 1,067 2,975 4,344 13M
Neukolln 1,890 4,040 3,166 13M
Mitte, Prenzlauerberg
& Friedrichshain 975 2,184 9,801 21M
Chicago Sketch 933 2,950 83,113 245M
Berlin 12,100 19,570 49,689 972M
c©2004 Massachusetts Institute of Technology Computational Experience 37
Part of an Instance
Demand Solution
c©2004 Massachusetts Institute of Technology Computational Experience 38
Unfairness
• Normal unfairness of path P for OD-pair i = �Pmin Q∈Pi
�Q
→ 1 ≤ normal unfairness ≤ 1 + ε
• Loaded unfairness of path P for OD-pair i = tP (f)min Q∈Pi
tQ(f)
→ 1 ≤ loaded unfairness
• UE unfairness of path P for OD-pair i = tP (f)min Q∈Pi
tQ(BUE)
→ 0 ≤ UE unfairness
c©2004 Massachusetts Institute of Technology Computational Experience 39

influenced
1
1.02
1.04
1.06
1.08
1.1
1.12
1.14
1.16
1.18
1.2
UE 1 1.1 1.2 1.3SO
percentile 99th
97.5th
95th
1 + ε)
1
1.1
1.2
1.3
1.4
1.5
1.6
UE 1 1.1 1.2 1.3 SO
percentile 99th
97.5th
95th
1 + ε)
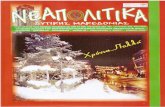
c© Computational 40
C(CSOε) tP (f )
min Q∈Pi tQ(f )
2500
3000
3500
4000
UE 1.05 1.1 1.2 1.3 1.4 1.5 2 SO 1
1.2
1.4
1.6
Cost
Loaded Unfairness
1 + ε)
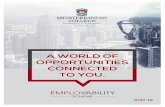
c© Computational 41
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
1 1.2 1.4 1.6 1.8 2
prob
abili
ty
loaded unfairness
Tolerance UE
1.05 1.1 1.2 1.3 1.4 1.5
2 SO
0
0.2
0.4
0.6
0.8
1
0.6 0.7 0.8 0.9 1 1.1 1.2
prob
abili
ty
UE unfairness
Tolerance UE 1.05 1.1 1.2 1.3 1.4 1.5 2 SO
tP (f ) min Q∈Pi
tQ(f ) tP (f )
min Q∈Pi tQ(BUE)
c© Computational 42
C(CSOε) tP (f )
min Q∈Pi tQ(f )
2500
3000
3500
UE 1.01 1.02 1.03 1.05 1.1 1.2 1.3 1.4 1.5 2 SO 1
1.2
1.4
1.6
Cost UE
Loaded Unfairness
Cost Free-flow
1 + ε)
c© Computational 43
Unfairness Percentiles
normal unfairness: controlled directly
loaded unfairness:
tolerance ( tolerance (
2004 Massachusetts Institute of Technology Experience
Free-flow Normal Lengths: High Cost
tolerance (
2004 Massachusetts Institute of Technology Experience
Unfairness Distributions: High Travel Times
2004 Massachusetts Institute of Technology Experience
UE Travel Times: Good Normal Lengths
tolerance (
2004 Massachusetts Institute of Technology Experience

0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
1 1.2 1.4 1.6 1.8 2
prob
abili
ty
loaded unfairness
Tolerance UE
1.01 1.02 1.03 1.05
1.1 SO
0
0.2
0.4
0.6
0.8
1
0.6 0.7 0.8 0.9 1 1.1 1.2
prob
abili
ty
UE unfairness
Tolerance UE 1.01 1.02 1.03 1.05 1.1 SO
tP (f ) min Q∈Pi
tQ(f ) tP (f )
min Q∈Pi tQ(BUE)
c© Computational 44
Convergence
0
2000
4000
6000
8000
10000
12000
14000
UE 1 1.1 1.2 1.3 SO
seco
nds
gap 0.5
1.0
2.0
4.0
1 + ε)
0
2000
4000
6000
8000
10000
12000
14000
0.5 1 1.5 2 2.5 3 3.5 4
seco
nds
gap
tolerance UE
1.01
1.02
1.03
1.05
1.1
1.2
1.3
SO
c© Computational 45
CSO
1
1.2
1.4
1.6
1.8
2
2.2
1 1.02 1.04 1.06 1.08 1.1 1.12 1.14 1.16
Instance
SO
UE
CSO
SF F
W N
MPF CS B
◦
◦
◦ ◦
◦
◦
◦
C(x)/C(SO )
Solutions
‘◦’ denote CSO1.02
c© Computational 46
Review
• Results:
2500
3000
3500
4000
UE 1.05 1.1 1.2 1.3 1.4 1.5 2 SO
tolerance
1
1.2
1.4
1.6
Cost
Loaded Unfairness
2500
3000
3500
4000
UE 1.01 1.02 1.03 1.05 1.1 1.2 1.3 SO
tolerance
1
1.2
1.4
1.6
Cost
Loaded Unfairness
c© 47
Unfairness Distributions: Fair Enough
2004 Massachusetts Institute of Technology Experience
More difficult with bigger tolerance
Runtime grows exponentially
tolerance (
2004 Massachusetts Institute of Technology Experience
allows us to control the tradeoff between efficiency and unfairness
load
ed u
nfa
irnes
s
marked with
2004 Massachusetts Institute of Technology Experience
Free-flow normal length UE normal length
2004 Massachusetts Institute of Technology

Conclusion
•
–
– SO
– UE
– CSO
•
•
–
– UE
– UE
c© 48
• can optimized
•
•
c© 49
c© 50
1982 2000
34% 58%
c© 51
Optimization Approach to Route Guidance
Conventional route guidance methods focus on the individual
not implementable
not efficient
is a better alternative: efficient and fair
Demand-dependent normal lengths are a better choice
Considered Networks with Capacities
Multiple equilibria
Worst is unbounded
Guarantee for best is as good as without capacities
2004 Massachusetts Institute of Technology
Summary
In principle, the system performance be while obeying individual needs and systems response.
In fact, many different tools, from non-linear optimization, from linear programming, and from discrete optimization, nicely complement each other to lead to a fairly efficient algorithm for huge (static) instances.
Yet, more (dynamic) ideas needed before technology ready for field test.
2004 Massachusetts Institute of Technology
THE END
2004 Massachusetts Institute of Technology
2002 Urban Mobility Study shows we could be better (http://mobility.tamu.edu/ums)
time penalty for peak period travelers 16 hours 62 hours
period of time with congestion 4.5 hours 7 hours
volume of roadways with congestion
2004 Massachusetts Institute of Technology

tolerance cost
UE 2915 1.056 1.01 2800 1.348 1.02 2738 1.375 1.03 2726 1.424 1.05 2694 1.456 1.10 2676 1.517 1.20 2657 1.545 1.30 2657 1.538 SO 2657 1.546
c© 52
2650
2700
2750
2800
2850
2900
2950
3000
UE 1 1.1 1.2 1.3 SO
cost
tolerance
gap 0.5
1.0
2.0
4.0
c© 53
UE Travel Times: Good Normal Lengths
99th percentile loaded unfairness
2004 Massachusetts Institute of Technology
Solution Quality: UE normal lengths are good
2004 Massachusetts Institute of Technology