Ecua k s k B k s ( ) c c c ( ) k B s 2 2 ' B
22
Construcia schemei bloc operaionale liniare i deducerea funciilor de transfer pentru echipamentele de acionare hidraulic ACIONARI HIDRAULICE I PNEUMATICE Dinamica Echipamentelor i Sistemelor 175 Ecuaia caracteristic a sistemului în circuit închis va fi: ( ) ( ) ( ) 0 ' 2 2 2 2 2 2 2 2 2 2 0 2 12 2 02 2 01 01 1 2 01 1 2 1 2 12 2 02 02 2 2 01 2 01 1 2 12 2 02 01 1 2 01 1 2 1 02 2 2 01 3 2 12 2 02 01 1 02 2 01 1 2 01 1 2 1 4 02 2 01 1 5 = + + + + + + + + + + + + + + + + + + + + + + + + + + + + k m c B s B k m S m c B s B k m c B k m S B s m c k B k B k m S s k B k s k c c c c c c c c c ω ω ω ξ ω ω ω ξ ω ω ξ ω ω ξ ω ω ξ ω ω ω ξ ω ξ ω ξ ω ω ξ ω ξ (4.74) Pentru a gsi punctele de intersecie ale ramurilor locului rdcinilor cu axa imaginar, unde sistemul îi pierde stabilitatea, se procedeaz în felul urmtor: - se formeaz o tabel Routh pentru ecuaia caracteristic a sistemului; - se identific termenul din prima coloan de la stânga care conine pe 0 ' k i pentru care toate celelalte elemente ale liniei respective sunt nule; - se determin valoarea lui 0 ' k care reduce acest termen la zero i se asociaz aceast valoare cu o rdcin imaginar, deci cu un punct de intersecie a locului rdcinilor cu axa imaginar; - cu valoarea lui 0 ' k determinat se formeaz ecuaia auxiliar în 2 s a tabelei Routh pentru a obine punctul de intersecie cu axa imaginar. Pentru o ecuaie de gradul 5 de forma: 0 0 1 2 2 3 3 4 4 5 5 = + + + + + a s a s a s a s a s a (4.75) Tabela Routh este: 5 s 5 a 3 a 1 a 4 s 4 a 2 a 0 a 3 s 1 b 2 b 3 b 2 s 1 c 2 c 3 c 1 s 1 d 2 d 3 d 0 s 1 e 2 e 3 e unde: 4 2 5 3 4 1 a a a a a b - = ; 4 0 5 1 4 2 a a a a a b - = ; 0 3 = b ; 1 2 4 2 1 1 b b a a b c - = ; 1 3 4 0 1 2 b b a a b c - = ; 0 3 = c ;
Transcript of Ecua k s k B k s ( ) c c c ( ) k B s 2 2 ' B

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
175
Ecua�ia caracteristic� a sistemului în circuit închis va fi: ( )
( )
( )
0'22
222
222
22
02
12202
201011
201
1
21
2
12202022
201
2011
2
12202011
201
1
21
022201
3
2
12202011022011
201
1
21
4022011
5
=+���
����
�++
���
�
����
����
�++��
�
����
�+++
+���
�
�+��
�
����
�++��
�
����
�++++
+��
�
����
����
�+++++++
++++
kmc
BsBkmS
mc
B
sBkmc
BkmS
B
smc
kBkBkmS
skBksk
c
cc
ccc
ccc
ωωωξωωωξω
ωξωωξωωξω
ωωξωξωξω
ωξωξ
(4.74) Pentru a g�si punctele de intersec�ie ale ramurilor locului r�d�cinilor cu
axa imaginar�, unde sistemul î�i pierde stabilitatea, se procedeaz� în felul urm�tor:
- se formeaz� o tabel� Routh pentru ecua�ia caracteristic� a sistemului; - se identific� termenul din prima coloan� de la stânga care con�ine pe 0'k �i pentru care toate celelalte elemente ale liniei respective sunt nule;
- se determin� valoarea lui 0'k care reduce acest termen la zero �i se asociaz� aceast� valoare cu o r�d�cin� imaginar�, deci cu un punct de intersec�ie a locului r�d�cinilor cu axa imaginar�;
- cu valoarea lui 0'k determinat� se formeaz� ecua�ia auxiliar� în 2s a tabelei Routh pentru a ob�ine punctul de intersec�ie cu axa imaginar�.
Pentru o ecua�ie de gradul 5 de forma: 001
22
33
44
55 =+++++ asasasasasa (4.75)
Tabela Routh este: 5s 5a 3a 1a 4s 4a 2a 0a 3s 1b 2b 3b 2s 1c 2c 3c 1s 1d 2d 3d 0s 1e 2e 3e
unde:
4
25341 a
aaaab
−= ;
4
05142 a
aaaab
−= ; 03 =b ;
1
24211 b
baabc
−= ; 1
34012 b
baabc
−= ; 03 =c ;

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
176
1
21211 c
cbbcd
−= ; 02 =d ; 03 =d ;
1
21211 d
dccde
−= ; 02 =e ; 03 =e .
Pentru aplica�ia numeric� considerat� rezult�: Ecua�ia caracteristic� a sistemului devine:
0'10157,1116
10781,903110536,14610948,65710733,41094,5
05
828311411514
=+⋅+
+⋅+⋅+⋅+⋅+⋅−
−−−−−
k
sssss
Pentru aceast� ecua�ie se realizeaza tabela Routh . Termenul din prima coloan� care con�ine pe 0'k �i pentru care celelalte elemente ale
liniei sunt nule, corespunde lui s 1 . Pentru ca acest termen s� fie nul trebuie s� avem:
0'5725,1'10332,710536809 200
38 =−⋅+⋅ −− kk Rezolvând aceast� ecua�ie rezult�:
14,56'01 −=k
80,60'02 =k Cum factorul de amplificare trebuie s� fie pozitiv, rezult� valoarea corespunz�toare pentru limita de stabilitate
80,60'0 =k Pentru a ob�ine punctul de intersec�ie cu axa imaginar�, se formeaz� ecua�ia auxiliar�
în 2s a tabelei Routh pentru valoarea 80,60'0 =k .
Ecua�ia auxiliar� in 2s este: ( ) 0'10157,1116'1053,1210346,70 0
520
68 =+⋅+⋅+⋅ −−− ksk .
Care pentru 80,60'0 =k devine: 081,6010527,762 26 =+⋅ − s de unde: 399,28212 js ±= . Deci exist� o pereche de puncte conjugate de intersec�ie a ramurilor locului r�d�cinilor
cu axa imaginar�, situa�ie la care sistemul î�i pierde stabilitatea. Este necesar s� compar�m valoarea limit� a factorului de amplificare 0'k , cu valoarea
care se ob�ine pentru modelul generatorului experimental. Înlocuind in rela�ia (4.61) stabilit� pentru factorul total de amplificare, constantele
sistemului analizat, se ob�ine valoarea efectiv� a factorului total de amplificare al sistemului. 806.0'0 =efk
Comparând aceast� valoare cu valoarea corespunz�toare limitei de stabilitate, se constat� c� pentru modelul realizat exist� o distan�� apreciabil� pân� la limita de stabilitate. Rezult� c� se poate ac�iona asupra parametrilor constructivi ai generatorului hidraulic de vibra�ii, în sensul m�ririi factorului de amplificare �i al apropierii acestuia de valoarea 0'k , p�strând îns� o distan�� suficient� care s� garanteze o func�ionare stabil� a sistemului. �

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
177
În urma studiului analogic realizat, rezult� concluziile: Frecven�a de lucru a generatorului este în jurul valorii frecven�elor proprii
ale celor dou� mase, care pentru o corect� func�ionare trebuie s� aibe valori cât mai apropiate una de alta.
Pentru a m�ri domeniul de varia�ie a frecven�ei de lucru a generatorului hidraulic de vibra�ii cu autocomand� a sertarului distribuitorului, se poate modifica ori valoarea masei principale �i secundare, sau amândou� în acela�i timp.
Deplasarea masei secundare (sertarul distribuitomlui hidraulic) are un defazaj fa�� de masa principal� a generatorului hidraulic de vibra�ii, în urma acestuia, de aproximativ π /2.
S-a constatat c� autooscila�iile nu au putut fi realizate la un debit mai mic de 15 îl/min�.
Rela�iile teoretice ale deplas�rilor celor dou� mase au fost confirmate în parte de rezultatele experimentale care arat� o varia�ie aproximativ liniar� a acestora cu presiunea de alimentare a vibratorului.
Pozi�ia ini�ial� a sertarului distribuitorului are influen�� asupra func�ion�rii stabile a generatorului hidraulic de vibra�ii �i într-o mic� m�sur� asupra amplitudinilor celor dou� mase.
Parametrii func�ionali ai vibratorului sunt influen�a�i de elasticitatea traseului de alimentare, precum �i de capacitatea �i presiunea de înc�rcare a acumulatorului ce echipeaz� sistemul.
Se eviden�iaz� o serie de factori ce pot fi modifica�i prin corelarea sau ajustarea anumitor elemente constructive ale generatoarelor hidraulice de vibra�ii de acest tip.
Din analiza teoretic� �i experimental� a generatoarelor hidraulice de vibra�ii se pot face o serie de observa�ii privind proiectarea, analiza �i exploatarea acestor sisteme generatoare de vibra�ii.
La acest tip de generatoare s-au utilizat func�iile de transfer pentru descrierea func�ion�rii �i determinarea locului de transfer �i locului r�d�cinilor pentru analiza stabilit��ii sistemului.
Analiza detaliat� efectuat� în lucrare a acestor sisteme au scos în eviden�� c� la realizarea �i exploatarea corect� a acestora, trebuie s� se �in� seama de o serie de factori fizici �i tehnologici, între care se men�ioneaz� ca fiind mai importan�i:
- calitatea suprafe�elor, m�rimea jocurilor, realizarea unor ajustaje corespunz�toare între piesele aflate în mi�care relativ� �i în zonele de etan�are (pulsa�ii proprii �i factori de amortizare);
- utilizarea unor materiale cu propriet��i fizico - mecanice superioare în zonele supuse uzurii datorate curgerii lichidului cu viteze mari �i foarte mari (

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
178
aprox.100 (m/s) - rezisten�e fixe, ansamblul duze - clapet�, ansamblul sertar - buc�� �i piston - cilindru;
- propriet��ile fizice ale lichidului de lucru, între care vâscozitatea �i compresibilitatea joac� un rol deosebit.
- elasticitatea conductelor afecteaz� pulsa�ia proprie a unor circuite �i de aceea este recomandat ca elementul de comand� - servovalva - s� fie montat� direct pe motorul de execu�ie al sistemului. �
4.2. Modelele numerice.
Pentru realizarea model�rii numerice a componentelor �i echipamentelor hidraulice este necesar� parcurgerea urm�toarelor etape:
• realizarea modelului dinamic al componentei sau echipamentului respectiv;
• stabilirea condi�iilor de liniarizare a ecua�iilor diferen�iale �i a valorilor în jurul c�rora se face liniarizarea;
• dac� se lucreaz� pe modelul neliniar se adopt� metoda de modelare numerica cea mai bun� �i sigur� pentru analiza numeric�;
• deducerea coeficien�ilor din ecua�iile diferen�iale ale modelului ca valori numerice specifice modelului concret ce urmeaz� a fi analizat;
• stabilirea m�rimilor parametrice ale modelului; • realizarea algoritmului de modelare �i a programului de calcul adecvat; • realizarea programului de calcul, ob�inerea diagramelor de model; • analiza rezultatelor.
În cele ce urmeaz� se prezint� câteva programe realizate pentru componente de ac�ionare �i pentru echipamente diverse. 4.2.1. Componente de SAH. 4.2.1.1.Pomp� cu cilindree fix� cu pistoane axiale.
Modelul dinamic al pompei este cel preluat din capitolul 2 �i se prezint� sub forma sistemului de ecua�ii diferen�iale:
dtdp
pV
Q ppIp
p ⋅−⋅−⋅= βαωπ20
��
( ) Ifp
Ifp
pI
rp MpVV
dtd
J =⋅+⋅+⋅���
����
�⋅++⋅ ε
πωδ
πγω
122
00��������������4. 74)

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
179
Modelul se particularizeaz�, spre exemplu, pentru o pomp� cu cilindree fix� cu pistoane axiale 720 EX , realizat� în România dup� licen�� Brueninghaus ( Hydromatyk).
Datele particulare ale modelului 720 EX sunt urmatoarele:
=pV0 0.000063 m3/rot; ( radmq p /10.00267,1 350
−= ); 040.0=η ; ;1=Pχ
;050,0 30 mV ch = =E 1000000000N/m2; dp=0.025m; b=0.025m; j=0.000008 m;
z=7; r=0.0525 m; J=10kgm2. Modelul numeric ce rezult� din 4.74 este descris de ecua�iile: diff(diff(pp(t),t),t)+.1040500420*diff(pp(t),t)+6.332947520*pp(t)=82742755.03 38.25360000-.9432153536e-10*pp(t)-.6283000000e-6*diff(pp(t),t)=diff(phi(t),t) -.9432153536e-10*diff(pp(t),t)-.6283000000e-6*diff(diff(pp(t),t),t)= diff(diff(phi(t),t),t)
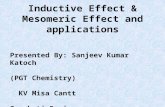
Raspunsul modelului la înc�rcarea pompei cu ajutorul unui motor de 250 cm3-rot, la un moment rezistent de 5ooNm, este prezentat în fig.4.33
Fig.4.33 În fig.4.33 s-a notat pe ordonat� varia�ia presiunii din pomp�, în N/m2, iar pe abscis�
varia�ia timpului în secunde. Rezult� c� presiunea din pomp� se stabilizeaz� la pornirea pompei dup� cca un minut �i 32 sec la valoarea de 13 MPa, ce corespunde valorii de de înc�rcare static� a pompei.

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
180
4.2.1.2.Pomp� cu cilindree variabil� cu pistoane axiale.
Modelul dinamic al pompei este cel preluat din capitolul 2, ca �i în cazul precedent, �i se prezint� sub forma sistemului de ecua�ii diferen�iale de mai jos, în care intervine factorul de reglare al cilndreei- Pχ :
dtdp
pV
Q pPpIp
Pp ⋅−⋅−⋅= βχαωπ
χ .2
0��
( ) Ifp
PIfp
PpI
rp MpVV
dtd
J =⋅+⋅+⋅���
����
�⋅++⋅ ε
πχωδ
πχγω
122
00���������������4. 75)
Factorul de reglare al cilindreei reprezint� un parametru al modelului, utilizat atunci când nu este luat în analiz� sistemul de reglare al cilindreei pompei ci numai pompa ca o component� reglabil� a sistemului. Modelul se particularizeaz�, spre exemplu, pentru o pomp� cu cilindree variabil� cu pistoane axiale 420 EV , realizat� în România dup� licen�� Brueninghaus ( Hydromatyk).
Datele particulare ale modelului 420 EV sunt urmatoarele:
=pV0 0.000063 m3/rot; ( radmq p /10.00267,1 350
−= ); 040.0=η ; [ ];1.0=Pχ
;050,0 30 mV ch = =E 1000000000N/m2; dp=0.025m; b=0.025m; j=0.000008 m;
z=7; r=0.0525 m; J=10kgm2. Parametrul modelului este Pχ , care ia valorile de 0,2;0,4;0,6;0,8, �i reprezint�, 20,40,60,80 % din cilindreea maxim� a pompei. Modelul numeric ce rezult� din 4.75 este descris de ecua�iile: diff(diff(pp(t),t),t)+ Pχ *0.1040500420*diff(pp(t),t)+ Pχ *6.332947520*pp(t)= = Pχ *82742755.03 38.25360000-0.9432153536e-10*pp(t)- Pχ *0.6283000000e6 *diff(pp(t),t)=diff(phi(t),t) -.9432153536e-10*diff(pp(t),t)- Pχ *0.6283000000e-6*diff(diff(pp(t),t),t)= diff(diff(phi(t),t),t), în care coeficien�ii sunt afecta�i de Pχ .
Raspunsul modelului la înc�rcarea pompei cu ajutorul unui motor de 250 cm3-rot, la un moment rezistent de 5ooNm, este prezentat în fig.4.34, func�ie de Pχ . Modelul ia în considera�ie doar influien�ele produse de modificarea cilindreei pompei f�r� a �ine cont de dinamica sistemului de reglare a cilindreei. Analiza este doar cantitativ� nu �i calitativ�.

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
181
a) b) c) d)
Fig.4.34 Din diagrame rezult� c� factorul de reglare al cilindreei pompei modific� în mic� m�sur� nivelul presiunii de stabilizare a ansamblului pomp�-motor volumic. Se constat�, lucru valabil �i la modelul anterior ca presiunea de stabilizare este în jurul valorii de 13 MPa (cca 130 bar), fapt ce rezult� �i din calculul static al presiunii la func�ionarea de regim stabilizat, ce rezult� din rela�ia:
barV
Mp
pmh
6,13925,0.9,0.59,1
50..59,1 0
===∆η
;
la un randament mecanohidraulic estimat de 90%.

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
182
4.2.1.3.Motor volumic rotativ rapid cu cilindree fix� cu pistoane axiale. Modelul dinamic al motorului este:
dtdp
ppV
Q MMEM
M ⋅+−⋅+⋅= βαωπ
)(2 00 ��
( ) ( )
( );2
sgn22
00
000
ppV
M
ppVV
dtd
J
ME
fMM
EMM
ME
rM
−⋅=+
+−⋅⋅⋅+⋅��
���
� ⋅++⋅
π
εωπ
ωδπ
γω
(4.76) Modelul se particularizeaz�, spre exemplu, pentru un motor cu cilindree
fix� cu pistoane axiale F120-EX , realizat� în România dup� licen�� Brueninghaus ( Hydromatyk).
Datele particulare ale modelului F120- EX sunt urmatoarele:
=MV0 0.000063 m3/rot; ( radmq M /10.00267,1 350
−= ); 040.0=η ;
;1=Mχ ;050,0 30 mV ch = =E 1000000000N/m2; dp=0.025m; b=0.025m;
j=0.000008 m; z=7; r=0.0525 m; J=10kgm2.
Modelul numeric ce rezult� din 4.76 este descris de ecua�iile:
diff(diff(pp(t),t),t)+.4148240180*diff(pp(t),t)+93.96766732*pp(t) = 319166023.7;
9.930841122-.1912998429e-10*pp(t)-.1631100727e-6*diff(pp(t),t) = diff(phi(t),t);
-.1912998429e-10*diff(pp(t),t)-.1631100727e-6*diff(diff(pp(t),t),t) = diff(diff(phi(t),t),t);
Raspunsul modelului pentru un motor de 63 cm3/rot, încarcat cu un cuplu rezistent de
45 Nm, este prezentat în fig.4.35. Sistemul modelat este ac�ionat de o pomp� tot de 63 cm3/rot.

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
183
Fig.4.35 În fig.4.35 s-a notat pe ordonat� varia�ia presiunii din pomp�, în N/m2, iar pe abscis�
varia�ia timpului în secunde. Rezult� c� presiunea din motor se stabilizeaz� la pornire dup� cca 30 sec la valoarea de cca 4 MPa, ce corespunde valorii de de înc�rcare static� a motorului.
4.2.1.4.Motor volumic rotativ lent cu cilindree fix� cu pistoane radiale. Modelul dinamic al motorului este:
;....2
2**0
dtdp
pkV
Q MMeM
M βαωπ
++��
���
� −=
( ) =+−��
���
� −+ ESeMOMe
SM MkV
dtd
J 2** ...2
. ωωδπ
ω;.
.2*0 pk
V M ��
���
� −π
(4.77)
Modelul se particularizeaz�, spre exemplu, pentru un motor cu cilindree fix� cu pistoane radiale R2A-marimea 3 , realizat� în România dup� concep�ie româneasc� �i fabricat la Promex Br�ila. Motorul este un motor de construc�ie compact� cu carcas� rotativ� montat în janta ro�ii utilajului, utilizat în general în trac�iunea utilajelor de construc�ii.
Pentru execu�ia modelului R2A- m�r.3, modelul (4.77) a fost transformat din
sistemul interna�ional în sistemul tehnic pentru a evita cumulul de erori de rulare, specifice modelelor cu coeficien�i foarte mici �i foarte mari, ecua�iile transformate sunt urmatoarele:

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
184
k1*n(t)+k2*p(t)^2+k3*diff(p(t),t)=Qîi�; k4*diff(n(t),t)+k5*(n(t)-k6)^2+Mîi�=k7*p(t); (4.77*)
Se observ� c� modelul este neliniar, deoarece con�ine variabilele la putere. Constantele modelului sunt:
k1=1.8; k2=0.00011; k3=0.00000106; k4=0.015; k5=0.0672; k6=15; k7=2.4; Parametrii modelului sunt:
Q=î7; 9.6; 18.5; 27.8; 36.6; 45�, în îl/min�; �i M=î110; 114; 118; 120; 232; 358�, în îdaNm�;
Rezultatele model�rii se ob�in sub forma unor grafice ce reprezint� varia�ia tura�iei motorului în timp (a) �i varia�ia presiunii în timp (b) î�,î�,î�. Tura�ia se ob�ine în îrot/mim�, presiunea în îbar�, iar timpul în minute, fig nr.4.36 a,b. Tura�ia �i presiunea sunt reprezentate pe ordonat� iar timpul pe abscis�.
a) b) Fig.4.36
Din analiza graficelor rezult� comportarea stabil� a motoarelor în toate regimurile analizate , timpul de stabilizare fiind redus, iar valorile în jurul c�rora se stabilizeaz� variabilele fiind confirmate prin calcule în regim stabilizat dar �i de date experimentale.�î�,î�,î�. 4.2.1.5.Motoare volumice rotative cu cilindree variabil�. Indiferent de tipul motorului dac� acesta este de tip volumic acesta va avea cilindreea reglabil� func�ie de comenzile externe primite de la sistemul de comand�, reglare �i automatizare al utilajului. Reglajul se va numi reglaj secundar (vezi partea I-a a lucr�rii). Cilindreea motorului va fi reglat� între o valoare minim� �i o valoare maxim� ce corespunde st�rii normale, necomandate a motorului. Modelarea numeric� va fi abordat� ca la motoarele lente dar modelele vor fi afectare de factorul de reglare al cilindreei motorului- .Mχ

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
185
a)motoare cu pistoane axiale. (rapide) Modelul motorului este descris de ecua�iile 2.27 din cap. 2. Modelarea se realizeaz� la fel ca la exemplul precedent al motorului rapid. Acest model nu aduce elemente noi fa�� de modelul motorului fix decât sub aspectul c� pentru anumite valori ale factorului Mχ , motorul poate avea comport�ri instabile, care trebuie evitate. În rest o imagine complect� asupra reglajului se ob�ine luând în considera�ie întregul sistem format din motor-regulator-comand�. b) motoare cu pistoane radiale. (lente) Modelul motorului este descris de ecua�iile 2.27* din cap. 2��În rest toate considera�iile anterioare sunt valabile �i pentru aceste motoare. 4.2.1.6.Motoare hidraulice liniare (cilindri hidraulici).
Modelul dinamic al motorului este:
( )dtdp
ppdtdp
AQ MLCM ⋅+−⋅+⋅= βα 0 ��
�
( ) ( ) ( )002
2
sgn ppAFppAxdtdx
dtxd
M EfMLr ⋅−=+⋅−++ ααεγ � �������������������
�i este descris în detaliu în cap. 2 a lucr�rii. Modelul se particularizeaz�, spre exemplu, pentru un motor liniar, realizat
în România dup� concep�ie româneasc� �i fabricat la Promex Br�ila. Motorul este un motor de construc�ie compact� cu tij� unilateral� montat pe articula�ii sferice, utilizat în general în ac�ionarea echipamentelor utilajelor de construc�ii. Modelul este simbolizat 140x 60x 1200.
Datele particulare ale modelului sunt urmatoarele:
015.0=A m2;( =D 138mm); 040.0=η ; ;050,0 30 mV ch = =E 1000000000
N/m2; j=0.000002 m; 100=EF kN; 2500=M kg. Modelul numeric ce rezult� din 4.78 este descris de ecua�iile: diff(pp(t),t$2)+2*xil*oml*diff(pp(t),t)+oml^2*pp(t)= oml^2*(ve*gamal/a+fe/a); ve-alfal*pp(t)/a-ch*diff(pp(t),t)/2/a = diff(x(t),t); -alfal*diff(pp(t),t)/a-ch/2*diff(pp(t),t$2)/a = diff(x(t),t$2);

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
186
Raspunsul modelului rezult� din graficele de mai jos, ce reprezint�, fig. 4.37a-varia�ia presiunii din motor, func�ie de timp, iar fig.4.37 b, varia�ia vitezei la tija cilindrului func�ie de timp. a) b)
Fig.4.37 Presiunea este reprezentat� în N/m2, func�ie de timp, în secunde, iar viteza în m/sec, func�ie de timp, în sec. 4.2.1.7. Regulatorul hidraulic de putere cu caracteristic� hiperbolic� exact�.
• Construc�ia regulatorului. Caracteristica static�.
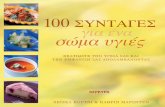
Schema principial� a unui ansamblu regulator de putere ata�at unei pompe cu cilindree variabil�, este prezentat în fig.nr.4.38.[ ]
In figur� se sugereaz� componen�a ansamblului regulator de putere cu caracteristic� exact�.
Se remarc� faptul c� ansamblul regulator este compus din patru subsisteme ce interac�ioneaz� reciproc, prin componente mecanice sau prin intermediul agentului hidraulic. Acestea sunt:
Sistemul de basculare al pompei (a), ce con�ine componentele ce ac�ioneaz� direct asupra blocului de basculare al pompei (1);
Sistemul de urmrire (b), ce con�ine elementele hidraulice de leg�tur� cu sistemul de basculare �i regulatorul propriuzis;

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
187
Regulatorul de putere (c), ce con�in componentele ce realizeaz� caracteristica hiperbolic� propriuzis�;
Pârghia sistemului de urmrire(10),ce realizeaz� leg�tura de reac�ie între (b) �i (a).
Fig. nr. 4.37 .Regulatorul de putere constant�. Schema de principiu �i componen��. (1);Blocul înclinat al pompei; (2) pârghia de basculare; (3) tija mecanismului de basculare; (4) arc; (5) cilindrul sistemului de basculare; (6) pistonul de comand� al sistemului de urm�rire; (7) pistonul de comand� al regulatorului; (8) sertarul sistemului de urmrire; (9) buc�a de distribu�ie; (10) pârghia sistemului de reac�ie; (11) arcul sistemului de urmrire; (12) pârghia regulatorului de putere; (13) arcul regulatorului; (14) sertarul regulatorului; (15) carcasa regulatorului.
�
�
�
�
�
�
�
�
�
���
���
�χ
���
��
�
�
�
�
�
�
�
�
�
������ ���
������������
����� �����������
��
��
��
��
��
���
��
� �
���
!
��"� ��
#�$
#%$
������������
��
������ ���
��
�&
�'
��
���
�
$�%
��
�( "�) �
� �
����� �����������
'
%
α�
(� ��)�*�
#�
&
���
α+��
,��+��
α+�%&
,��+��'���(-���
���
�
.
� %

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
188
Caracteristica de regulator rezult� din echilibrul static al for�elor aplicate pe pârghia regulatorului (12), respectiv:
ar .p.s = K0.x0 .a ; (4.79) de unde rezult� caracteristica static� a regulatorului: p.s =(K0 .x0 .a )/ ar = const. ;î bar.mm � ; (4.80)
Semnifica�ia termenilor din rela�iile (4.79) �i (4.80) sunt: ar-aria frontal� a pistonului (7); p-presiunea hidrostatic� la refularea pompei; K0-constanta elastic� a resortului (13) ; x0- prestrângerea ini�ial� a resortului (13) ; a – bra�ul de pârghie la care se aplic� for�a elastic� a resortului (13) ; s- bra�ul momentan de pârghie al regulatorului.
Tinând cont de rela�iile de propor�ionalitate între parametrii din rela�iile ce definesc puterea mecanic� �i momentul la ax, func�ie de cilindree, elementele constructive ale pompei, caracteristica (4.80) are expresia:
......2
.612. 104
21
constn
Nsp
AP
==λλ τ
;[ ]��� ; (4.81)
unde:N-puterea reglat de regulator în Kw; n- tura�ia la axul pompei în rot/min; λ 1-raportul între raza de dispunere a pistoanelor pompei �i lungimea pârghiei de basculare(2); AP-aria frontal a pistoanelor pompei în cm2; τ -nr. de pistona�e ale pompei; λ 2-raportul e1/ e2-a pârghiei (10) a sistemului de urmrire.
Egalitatea rela�iilor (4.80) �i (4.81) permite dimensionarea regulatorului func�ie de puterea N, dorit� a fi reglat�.
• Modelul dinamic al regulatorului. Caracteristici dinamice.
Modelul dinamic al ansamblului de reglare este compus din ecua�iile de mi�care pentru fiecare component� a ansamblului �i din ecua�iile de debite evaluate în nodurile re�elei de comand� a regulatorului.
Ecua�iile ce definesc procesul dinamic sunt:
Pentru sistemul de basculare al pompei (Fig. 4.37.a).
Variabila momentan� a sistemului este y, deplasarea axial� a ansamblului de basculare (3). Ecua�ia de mi�care a sistemului, este:
mb +dtd y
2
2.py
dtdy
ApAykk PbBobbfb ...)( 1λτ ′′+=++ ;[ ] ; (4.82)
unde:mb-masa redus� a sistemului de basculare, pe direc�ia tijei sistemului, ce are expresia , mb =J/r2+ mps+mt ; J- momentul de iner�ie al blocului basculant al

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
189
pompei, în kg.m2; r-raza pârghiei (2), în m; mps-masa pistonului sistemului de basculare, în kg; mt-masa tijei sistemului de basculare (3) �i unei treimi din masa arcului(4); kfb=η(2. π .db.lb)/jb-coeficient de frecare viscoas� între componentele sistemului de basculare+cap 1, ;(η-viscozitatea dinamic� a agentului hidraulic; db-diametrul pistonului (5) ; lb-lungimea muchiei de etan�are a pistonului (5); jb-jocul diametral intre pistonul (5) �i carcasa sistemului de basculare); kb-constanta elastic� a resortului (4) ; yob-prestrângerea resortului (4) ;Ab-aria frontal� a pistonului (5) ; pb-presiunea din incinta cilindrului sistemului de basculare, aceia�i cu presiunea la ie�irea din sistemul de urm�rire; τ ′′ -num�rul de pistoane ale pompei, aflate pe refulare. Pentru servosistemul de urm�rire (Fig.4.47.b).
Variabila momentan� a sistemului este x, deplasarea axial� a ansamblului de pistoane (6) �i (8). Ecua�ia de mi�care, este:
pxdtdxx
ApAxkkdtdm Sssossfss .)(. 122
2
+=+++ ;[ ] ; (4.83)
unde:ms-masa ansamblului de elemente (6) �i (8), în kg.;kfs=η.(2.π .ds.ls)/js-coeficient de frecare viscoas� între componentele sistemului de urm�rire (semnifica�ia termenilor este asem�n�toare cu cea descris� anterior).;ks-constanta elastic� a resortului (11); xos-prestrângera resortului (11); A1S, A2S- ariile frontale de comand� ale pistonului (6); ps-presiunea de comand� a sistemului de urm�rire, aceia�i cu presiunea la ie�irea din distribuitorul propor�ional al regulatorului de putere. Pentru regulatorul de putere (Fig.4.37.c). Variabila momentan� a regulatorului de putere este z, deplasarea axial� a sertarului (14) al regulatorului. Ecua�ia de mi�care, este:
)_()( max2
2
xpbb
az
ba
dtdzz
saxkkdtdm r
oofpp =+++ ;[ ] ; (4.84)
unde: mp-masa sertarului (14) �i masa redus� pe axa sertarului a sistemului de pârghii (12); kfp=η(2. π .dp.lp)/jp coeficient de frecare v�scoas� între componentele regulatorului; ko-constanta elastic� a resortului (13); xo-prestrângerea resortului (13); a/b- raportul bra�elor pârghiei leg�turii de reac�ie(12); smax-valoarea maxim� a bra�ului s.

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
190
Pentru leg�tura de reac�ie (Fig.4.37.b)
Variabila momentan� a leg�turii de reac�ie este x*, deplasarea axial� a buc�ei (9) a sistemului de urm�rire, deplasare realizat� de sistemul de pârghii (10). In acest model au fost neglijate for�ele iner�iale, de frecare viscoas�, considerându-se doar leg�tura cinematic� realizat� de leg�tura de reac�ie, de unde rezult�:
X*= y/λ 2 ;[ ] (4.85)
Rela�iile de debite, presiuni �i arii de curgere ce definesc sistemul.
• C�derea de presiune în sistemul de urm�rire, pe ramura p-pb �i pb-T.
p- pb=ξ .�
ρ.AQ
SS
s2
2
; pb - po = ξ .�
ρ .
AQ
st
S2
2
; (4.86)
• C�derea de presiune în distribuitorul regulatorului de putere, pe ramura p-ps �i ps –T.
A
Qp
PS
p
sp 2
2
2.ρξ=− . ;
A
Qpp
pt
p
os 2
2
2ρξ=− ; (4.87)
unde:ASS =AST = π .ds.x �i APS = APT = π .dp.z • Debitul momentan de agent hidraulic livrat de pomp�, func�ie de cursa
(s) momentan� a regulatorului de putere. Q(s) = 2.λ 1 .Ap .τ .λ 2 .n.s = QO s ; (4.88) Pentru cazul analizat în lucrare Qo = 0,338,respectiv Qs = 0,338.s [m3/sec.]
• Debitul de agent hidraulic evalut în nodul 1 (Fig. 4.37).
Q(s) =χ .Ap . p..2ρξ
+ Qdtdp
Ev ∆+.0 ; m3/sec ; (4.89)
• Debitul de agent hidraulic evaluat în nodul II (Fig.4.37) ����� ∆+∆=∆ ;m3/sec. ; (4.90)
• Debitul de agent hidraulic absorbit de servosistemul de urm�rire, pe ramura direct�.
pdtdz
ab
dtdp
Edtdx
Q KaVA QSros
S +++=∆ ....1 1 ; (4.91)
unde:KQS=( πds.js3)/ ( 96.η.ls )-coeficient de pierdere de debit.
• Debitul de agent hidraulic evaluat în nodul III (Fig.4.37)

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
191
Pentru x≥ 0 �i z≥ 0
���� �����
�������
������� −
ξρπ+−
ξρπ=∆ ; m3/sec ; (4.92)
pKdpVApd bQb
bobbbs dtEdtdy
px ...2
... ++=−ξρ
π ; m3/sec ; (4.93)
d p.π .z. psp −.
2ξρ
= pKdpVA sqz
sOSs dtEdt
dx ++*
2 . ;m3/sec ; (4.94)
unde: KQb = ( �π db.jb3 )/ (96.η .lb ) ; KQZ ≈ 0
Pentru x≤ 0 �i z ≤ 0, rela�iile (4.92); (4.93); (4.94) p�streaz� aceia�i structur� matematic�, dar radicalii din rela�ii devin �
� − devine ��
�− �i
��
� − devine ����
− .
• Rela�ii de dimensionare în regim permanent a sistemului de urm�rire.
Din rela�iile (4.86) �i (4.87), în condi�ia po = 0, rezult�:
ps = p [1-(AST/ASS)2 ] ; (4.95)
Din rela�ia de echilibru static a for�elor pe pistonul (11), A2S.pS =A1S.p+KS.xOS ,rezult�:
�����
�������
��
��
����
�����
�����
��
+−−
= ; (4.96)
In rela�iile (4.86)-(4.96) s-a notat:ξ -coeficient de pierderi locale de sarcin� (considerat acela�i în toate aparatele sistemului) ;ρ -densitatea agentului hidraulic; QS ;QP ;∆ Q ; �∆ 1 ; ∆ Q2-debite de agent hidraulic circulate în diverse puncte ale sistemului; ASS ;AST ; APS ; APT –ariile sec�iunilor de curgere în aparatele hidraulice de distribu�ie ale sistemului ;χ -func�ie numeric� de comand� a deschiderii momentane a droselului D ; AD-aria nominal� de curgere a droselului D ; E –modulul de elasticitate al agentului hidraulic ; VO ; VOS ; VOb;VOS
*-volume de agent hidraulic supuse procesului de compresiune ; KQS;KQb-coeficien�i de pierdere de debit prin intersti�iile aparatelor de distribu�ie; js;jb-jocul diametral între sertarul �i corpul distribuitoarelor; ls;lb-lungimi ale pragurilor de etan�are din distribuitoare.

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
192
Modelul dinamic al ansamblului regulator este format din ecua�iile (4.82);(4.83);(4.84);(4.85);(4.88);(4.89);(4.90);(4.91);(4.92);(4.93);(4.94).
Pentru evaluarea comport�rii modelului în condi�ii sta�ionare, respectiv verificarea condi�iilor de dimensionare static� a sistemului, în modelul dinamic sau impus condi�iile ca variabilele (x,y,z), vitezele (x*;y*;z*) �i accelera�iile (x**;y**;z**) s� fie nule, împreun� cu respectarea condi�iilor (4.95) �i (4.96).
Modelul se particularizeaz� pentu o pomp� cu cilindree variabil�
modificat� 712-EV-20-00 de construc�ie Plopeni- România. Modelul dinamic rezolvat în variant� neliniarizat�, prin integrare numeric�, a utilizat
un program realizat în TURBO-PASCAL, denumit generic AXOP.[20]. Pentru cazul propus valorile constantelor din rela�ii sunt;
;3;7;1013.1;392.5;/140 *243 ==⋅=== − ττmAKgmrotcmV pbp �
;1078.0;104.8;0169.0;104 2423max
2 mAmKgJmymr D−−− ⋅=⋅⋅==⋅=
;102.0;1013.1;10038.1;3.00 24242
241 mamAmA rss ⋅=⋅=⋅== −−
�χ;01.0;015.0;1013.1;001.0;001.0 24 mlmllmAmdmd pbsbps ===⋅=== −
;0003.0;/102;/10584.2;104.6 0553
0 mxmNkmNkmy ssbb =⋅=⋅=⋅=;1020;1040;/1075.3;005.0 36
036
03
00 mVmVmNkmx s−− ⋅=⋅=⋅==
;6.1;/109.15;1040;1030 8360
36*0 =⋅=⋅=⋅= −− ξmNEmVmV bs
;2.3;1083;/104.40;/879 633 KWNmjsmKgmKg =⋅=⋅⋅== −−�ηρ
Rezultatele model�rii numerice sunt prezentate sub forma unor diagrame ca cele din fig.4.38. a.b si 4.39.a.b.
a) b)
Fig. 4.38

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
193
a) b) Fig.4.39
Semnifica�ia graficelor din fig.4.38 este urm�toarea: Q- reprezint� debitul momentan reglat de regulatorul de putere la presiunea p=148.26 bar, x este cursa momentan� a� ���������� ! �� ��� urm�rire iar y este cursa momentan� a sistemului de basculare a pompei, reprezentate pentru timp de 1 sec (a) si de o,1 sec (b), la salt de presiune pozitiv de +30 bar, iar a graficelor din fig.4.39 este aceia�i dar pentru salt negativ de presiune de –30 bar, la timpi de 0,9 sec (a) si o,1 sec (b). Se observ� din cele prezentate c� regulatorul de putere prezentat repezint� un sistem de comand�, format din mai multe subsisteme mecanohidraulice care interac�ioneaz� reciproc în scopul regl�rii cilindreei momentane a pompei.(vezi factorul Pχ ). Ca structur� de aparat, regulatorul de putere este o component� hidrostatic�, care realizeaz� varia�ia cilindreei unei pompe func�ie de presiunea de exploatare, p�strând puterea la axul pompei constant�.
Un alt mod de abordare a problemei reglajului de putere, ca sistem de componente, se prezint� în cap.5. 4.2.1.8. Regulator de debit cu balan�� de presiune cu dou� c�i. Regulatorul de debit are rolul de a men�ine constant debitul de agent hidraulic la un utilizator, indiferent de varia�ia presiunii pe acesta. Balan�a de presiune utilizat� în asociere cu o rezisten�� reglabil� formeaz� ansamblul utilizat ca regulator de debit. Se prezint� în cele ce urmeaz� modelul dinamic al unui regulator de debit la care rezisten�a hidraulic� este un distribuitor propor�ional ansamblul fiind montat în serie la circuitul hidraulic al unei pompe. Modelul dinamic al componentei de reglare este prezentat în fig. 4.40.

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
194
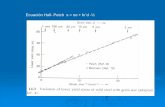
Fig.4.40.Modelul dinamic al regulatorului de debit cu balan�� de presiune cu dou� c�i. Modelul dinamic al regulatorului este descris de ecua�iile:
Ecua�ia de mi�care a sertarului balan�ei:
;))(().(.. 0**
2
2
FppxKppAxkdtdx
kdt
xdm iDcif −−−+−=++ δ (4.97)
Ecua�ia de debite în nodul I:
;. 40
dtdp
KQdtdp
EV
QQ iS
iSI −=−=
dtdp
Kdtdx
Adt
dpE
Vdtdx
AQ iiiI
*
4
*10 +=+= ; (4.98)
;1QQQ DRI += Ecua�ia de debit în nodul II:
;*
4
*10
2 dtdp
Kdtdx
Adt
dpE
Vdtdx
AQ cic −=−=
2QQQ DRC += ; (4.99) unde, debitele au urm�toarele rela�ii de definire:
.).(.2 1KppxdQ iI =−−= δρξπ ippx −− ).(δ ; (4.100) reprezint� debitul de agent ce traverseaz� balan�a de presiune; =−= cidDRDDR ppSQ ρξχ 2 ciD ppK −2.χ ; (4.101) reprezint� debitul e traverseaz� rezisten�a hidraulic�( distribuitorul propor�ional).
=1Q .//..2 3* Kppa iiZ =−ρξ // *
ii pp − ; (4.102) reprezint� debitul de comand� în incinta C1;
" ""
�
�
�
#
$�
$�
�%
�%
& D
��'��
�
��
��
��
� % ' �%
���%(
���(�

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
195
=2Q .//..2 3* Kppa ccZ =−ρξ // *
ii pp − ; (4.103) reprezint� debitul de comand� în incinta C2; IPS QQQ −= ; (4.104) reprezint� debitul la intrarea �n regulator. Constantele K1, K2;K3 �i K4, rezult� din nota�iile �i prescurt�rile din rela�iile (4.98)-(4.103), iar ξπ /2 dKD = , iar jdK JSf /)(2 ϑρδδπ += . Modelul se particularizeaz� pentru un regulator de fabrica�ie proprie construit în cadrul laboratorului hidraulic din Promex Braila, ce are urm�toarele valori de construc�ie:
[ ] [ ] [ ] [ ]mmmAmd JS 0016.0;015.0;10.884.7;001.0 25 ===== − δδδ ;
[ ] [ ] [ ] [ ]mjkgmmVmV 000001.0;1.0;0001.0;0005.0 310
30 ==== ;
[ ] [ ] [ ] [ ]NFmNkmamSDR 25050;/7500;0002.0;00005.0 022 −====
. 2.1;1.2;6.1 === DZ ξξξ ; [ ]sec/0008333.0 3mQP = ; [ ]MPapR 5.3= ; Rezultatele model�rii se ob�in sub forma unor grafice ca cele prezentate în fig.4.41, în
care sunt reprezentate principalele m�rimi fizice ce caracterizeaz� func�ionarea regulatorului.
Fig. 4.41.Parametrii dinamici ai regulatorului de debit.
Din analiza diagramelor przentate în fig. 4.41 se constat� c� rezultatele model�rii se
eviden�iaz� prin reprezentarea în func�ie de timp a deplasarii sertarului balan�ei sau a vitezei acestuia, a presiunii la ie�irea din aparat �i a presiunilor de comand� a sertarului �i a debitului la intrarea în distribuitorul propor�ional –Q1, �i a debitului la ie�irea din distribuitor-Q2. Se

�
Construc�ia schemei bloc opera�ionale liniare �i deducerea func�iilor de transfer pentru echipamentele de ac�ionare hidraulic�
AC�IONARI HIDRAULICE �I PNEUMATICE Dinamica Echipamentelor �i Sistemelor���
196
eviden�iaz� pe monitor datele de control ale aparatului , ce reprezint� datele de condi�ionare ale comport�rii dinamice- F0, k, δ �i alte date specifice prezentate în lista de definire a componentei precizate în fi�ierul- BALAN�A. În fig. 4.42 se prezint� câteva diagrame de comportare dinamic� a balan�ei analizate, pentru diverse st�ri de reglare ale acesteia.
Fig.4.42.