e Nav Topics

of 202
-
Upload
jade-espiritu -
Category
Documents
-
view
39 -
download
0
description
electronic
Transcript of e Nav Topics
140
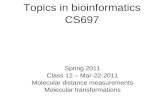
Hyperbolic Navigation SystemsHyperbolic LinesPrincipleLoran stations transmit radio signals of very short duration called pulses. However thefrequency of the signals arequite low about 90 kHz to 110 kHzDuration of pulse varies and is about 200s.If we assume thata pulseduration lasts for 200s, then:1 second = 1000000sIf the pulse recurring frequency (PRF) is 25pps then-25 pulses are sent in 1000000sTherefore the interval between each pulse is 1000000/25 = 40000sOr approximately the transmitter transmits a pulse of 200sand rests for 40000s.However the power transmitted during these short bursts is extremely high.Again we know that radio waves travel at the speed oflight, thatis at 300000 km per second.Or in 1000000sthe radio waves travel 300000000 metres.Or in 1sthe radio waves travel 300000000/1000000 = 300 metres.Applying the above we get 1 NM (1852 metres) is traversed in 6.173sNow let us assume that there are two transmitters (A and B) separated by a distance of 324 NM.Radio waves will take about 2000s(324 x 6.173) to traverse from A to B.Now let both the transmitters transmit at the same time. Also let a ship be placed at a position where both the signals are received at the same time. Now let the ship move along a course adjusting her course so that the two signals are always received at the same time (no time difference). It is seen that the course line is not a straight line but is ahyperbola.
Now it is seen that if there is a time difference in the arrival of the signals from the two transmitters, then too the track of equal time difference is a hyperbola.And a ship navigating with a receiver where the time difference can be recorded need only to keep the time difference constant to traverse the hyperbola.
However with multiple hyperbolas drawn for the same two transmitters we would have two identical hyperbolas on either side of the hyperbola of no time difference, as seen in the figure.The hyperbola of no time difference is known as the CENTRE LINE. And the line extending between the two transmitters is known as the base line extension.Thus in order to resolve the problem as to on which hyperbola the ship is traversing, we require to create a time difference between the transmission of the two stations.
So to overcome the above ambiguity, a transmitter (MASTER) transmits first and after the other station (SLAVE) receives this signal, it transmits its signal. So the ship will first receive the MASTER signal and then after a time delay will receive the signal from the SLAVE.Under this system the time difference between the two signals will be maximum on the hyperbola near the MASTER station and minimum on the hyperbola near the SLAVE station.Since the MASTER signal has to go from the MASTER station to the SLAVE station and activate it, thus a ship near the MASTER station will have to wait after getting a signal from the MASTER, for the signal from MASTER station to go and activate the SLAVE station and then get the SLAVE station signal.
There remains another problem. What happens if at a point the signal from the MASTER arrives at a time that the signal from the SLAVE also arrives (after being triggered by the MASTER),and there is no time difference.
In the above figure, the time difference purposely created between the transmission of the MASTER station and the SLAVE station is indicated as 1000son the base line extension. This time difference is known as the CODING DELAY.NO coding delay a ship close to the Slave station Y, receives signal from M and Y at the same time.Canadian East Coast GRI 5930Station Master:Latitude: 46 48.455 NorthLongitude: 067 55.62 WestStation Yankee:Latitude: 46 46.54 NorthLongitude: 053 10.46 West
A SHIP at location:Latitude: 46 44.54 NorthLongitude: 052 50.46 WestDistance GC: M to S: 618.97 NM (The signal travels from M towards S)M to Y: 605.139 NM (The signal travels from M towards Y and triggers Y)Y to S: 13.85 NM (Signal from Y travels towards S)618.989 NM
Loran C SystemINTRODUCTIONThe term Loran is an acronym forLOngRAngeNavigation (LORAN).Loran-C provides better than 0.25 nauticalmile(460 meters), absolute accuracy for suitably equipped users within the published areas.Users can return to previously determined positions with an accuracy of 18 to 90 meters using Loran-C in the time difference repeatable mode.STATIONSLoran-C transmitters are organized into chains of 3, 4 or 5 stations. Within a chain, one station is designated Master (M) while the other Secondary stations identified by the letters W, X, Y and Z. Different secondary designations are used depending on the number of station in a chain. This is summarized in the table below.CONFIGURATIONDESIGNATORSAN EXAMPLE
Master with 5secondariesM V, W, X, Y, ZSouthCentral U.S.9610
Master with 4secondariesM W, X, Y, ZSoutheast U.S.7980
Master with 3secondariesM X, Y, ZCanadian West Coast 5990
Master with 2secondariesM X, YEast China8390
Power levels can range from as low as 11 KW to as high as 1.2 MW.InRussia, a navigation system known as CHAYKA is compatible with Loran-C hence it forms part of the worldwide chain.The Loran-C navigation signal is a structured sequence of short radio frequency pulses on a carrier wave centered at 100 kHz. All secondary stations send pulses in bursts of eight, whereas the Master signal, for identification purposes, has an additional ninth pulse burst.The sequence of signal transmissions consists of a pulse group from the Master (M) station followed at exact time intervals by pulse groups from the secondary stations.The time interval between the reoccurrence of the Master pulse is called the Group
Repetition Interval (GRI).Each Loran-C chain has a unique GRI.Loran-C pulse structure and sequencing.Since all Loran-C transmitters operate on the same frequency, the GRI is the key by which a receiver can identify and isolate signal groups from a specific chain.
In naming the chains, the GRI is included. As an example theGreat Lakeschain has a GRI of 8970.This means the time interval is 89700 microseconds.The rightmost zero is always implied and the GRI is always in multiples of 10 microseconds.In old Loran-C receivers, the operator had to actually set this number to receive the chain.GRIsare chosen on the basis of:Baseline lengths between master andsecondaries.If the distance between the master and first secondary is say 1000kms, the radio signal will take 33,000 microseconds to get to the slave so the GRI cannot possibly be less than that.Number of slaves that have to be accommodated - they all have to have delays so that there is no possibility of them crossing over anywhere in coverage area.Geography.Other nearby chains with consideration given to interference.Skywavecross-rate interference.
Duty cycle of the transmitters - a faster GRI means the average power of the transmitted signal is higher so the final stage in the transmitter requires more cooling. With average baseline lengths and three slaves, the minimum GRI cannot be much less than 50,000 microseconds.Each Loran-C pulse has an approximate duration of 200 microseconds (s).
The interval between pulses within a pulse group is 1000s, except for the last two pulses at the Master, which have a 2000sinterval.1000s1000s1000s1000s1000s1000s1000s2000s
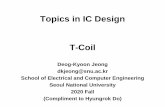
This above illustrates the points on the Loran-C pulse envelope that define the start time, the time of maximum envelope power and the stop time of the pulse.Two other important characteristics are associated with Loran-C signals, namely emission and coding delay.If the master station is taken as a reference, the emission delay refers to how long it takes before the secondary transmits after the Master has done so.The coding delay is a very small correction that removes the local (near-field) discrepancy between the envelope and carrier.Both parameters are measured in microseconds and are uniquely associated with each secondary station.BASELINES AND COVERAGEAn imaginary line drawn between the Master and each secondary station is called the baseline.The continuation of the baseline in either direction is called a baseline extension.Typical baselines are from 1200 to 1900 km (say 600 to 1000 nautical miles).Chain coverage is determined by:The power transmitted from each transmitter in the chain,The distance between them andHow the different transmitters are oriented in relation to each other (the geometry of the chain).SKY WAVE REJECTIONA frequency of 100 kHz was chosen for the Loran-C carrier wave to take advantage of propagation of the stable ground wave to long distances.However, the presence of delayed sky waves, reflected from the ionosphere,causedistortions of the pulse shape and change the carrier phase within the pulses of the received signal.Not only those, theskywavestake longer to arrive at the receiver than the ground wave, so their presence complicates the computation.To avoid sky wave contamination, the Loran-C receiver selects a zero crossing of a specified carrier cycle at the front end of the pulses transmitted by master and secondary stations.Making the cycle selection early in the ground wave pulse - usually the third cycle is employed - ensures that the time interval measurement is made using the uncontaminated part of the pulse.But how is the third peak selected when the start time of the pulse is not known?To solve the problem, the receiver compares the envelope (the rough shape) of the received pulse with a stored envelope.This process is called the rough measurement. When the third peak is finally located, the phase of the signal can be determined. The phase of the signal can be zero orpiradians.Precise control over the pulse shape at the transmitter also ensures that the selected zero crossing can be identified reliably by the receiver.
Zero Crossing: This diagram illustrates the third cycle in the Loran pulse.
PHASE CODINGTo reduce the effects of interference and noise on time difference measurements, and to assist in distinguishing between master and secondary stations, the carrier phase of selected transmitted pulses is reversed in a predetermined pattern.
The pattern is shown below, where aminussign indicates an inverted pulse (180 phase shift), and aplussign means no phase shift. This pattern is repeated every twoGRIs.Simply stated, phase coding determines whether the first peak in the pulse is upwards or downwards.Phase CodingTIME DIFFERENCE MEASUREMENTSThe basic measurements made by Loran-C receivers are to determine the difference in the time-of-arrival (Time Difference, TD) between the master signal and the signals from each of the secondary stations of a chain. Each TD value is measured to a precision of about 0.1 microseconds (100 nanoseconds) or better. As a rule of thumb, 100 nanoseconds correspond to about 30 metres. The principle of time difference measurements in hyperbolic mode is as illustrated.
Time Difference MeasurementsAUTOMATIC OPERATIONTodays state-of-the-art, solid-state Loran-C transmitters are adapted for automatic operation.The functions are monitored at the Control Centre, which has the capability of initiating corrective action using data communications.Loran-C Receiver Latitude/Longitude CorrectionsTodays Loran-C receivers are equipped with microprocessors which are designed to internally compute the latitude and longitude co-ordinates of the receiver, based on the Time Difference (TD) readings, and directly display these values.This may reduce the need to possess Loran-C charts,though it is still required.WHY?The latitude/longitude computationmaybe based upon a pure sea water path.This leads to errors if the Loran-C signals from the various stations involve appreciable overland paths since the speed of the signal will decrease by varying amounts, depending on the nature of the earths surface over which it is passing.Loran-C operates by measuring the difference in arrival times of the signals from the different stations in the Loran-C chain, and thus any unforeseen variation in the speed of a signal will result in an error in the latitude/longitude reading.Note that when the receiver is being used in the time difference mode (time difference readings being used to manually plot lines of position on a Loran-C chart), these errors are minimal and the system should be accurate to within nauticalmile.This is because the Loran-C lattice on a nautical chart has already been adjusted to allow for the signal variation as it travels over land.It is therefore necessary that before using the latitude/longitude feature of the receiver, to check the manufacturers operating manual to determine if corrections are necessary and how they may be applied to compensate for overland paths in order to obtain a greater fix accuracy.
The correction can be applied in either of two forms:insertionof a correction when the vessel is at a known location, ortheinsertion of a correction factor that is determined from a table orchartlet.The latter is called an Additional Secondary Phase Factor (ASF) correction, and can be used to ascertain the numeric value to apply. These corrections will normally be valid only within 50 to 100 miles of the location at which the correction was inserted because of the changing effects of landmass on the Loran signals in the different areas.PRECISION CLOCKSTo achieve high positioning accuracy within the service area, Loran-C transmitter stations are equipped with a bank of atomic clocks, which provide the timing for the transmitted Loran-C signal.Precise navigation with Loran-C demands that the error in the timing system must not exceed a few tens of nanoseconds. For Northwest European Loran-C System (NELS), it is specified that a stations clock shall not deviate by more than 30 nanoseconds from the clocks of the neighbouring stations. Achieving this precision in timing it is necessary to continuously measure the time deviation between the clocks in the system.ADDITIONAL SECONDARY FACTOR (ASF)A Loran-C receiver computes distances from Loran-C transmitting stations using the time of arrival measurements and the propagation velocity of the radio ground wave to determine position.Small variations in the velocity of propagation between that over seawater and over different landmasses are known as the Additional Secondary Factor, or ASF.Corrections may be applied to compensate for this variation. Such corrections may improve the absolute accuracy of the Loran-C service in positions where the received Loran-C signal passes over anything but seawater on its way from transmitter to receiver. The values of ASF depend mainly on the conductivity of the earths surface along the signal paths. Seawater has high conductivity, and theASFsof seawater are, by definition, zero. Dry soil, mountains or ice generally have low conductivity and radio signals travel over them more slowly, giving rise to substantial ASF delays and hence degradation of absolute accuracy.Fortunately,ASFsvary little with time, and it is possible to calibrate the Loran-C service by measuring ASF values throughout the coverage area.SERVICE INTEGRITYLoran-C stations are constantly monitored to detect signal abnormalities, which would render the system unusable for navigation.Blink is the prime means by which the user is notified that the transmitted Loran-C signal does not comply with the system specifications.Blinkalso indicates that the Control Centre cannot ensure that the signal complies with these specifications, for instance, as a result of discontinuation of data communications linking the Control Centre to the stations.Blinkis a distinctive change in the group of eight Loran-C pulses that can be recognized automatically by a receiver so the user is notified instantly that the Loran-C chain blinking should not be used for navigation.Blinkstarts at a maximum of 60 seconds after detection of an abnormality. Automaticblinkinitiated within 10 seconds of a timing abnormality may be added where Loran-C is extensively used for aviation purposes.ACCURACYThe Loran-C service will support an absolute accuracy varying from 185 meters to 463 meters (0.1 to 0.25 nautical miles), depending on where the observer is within the coverage area. Absolute accuracy defines a users true geographic position (latitude and longitude). Repeatable accuracy is a measure of an observers ability - by using a navigation system such as Loran-C - to return to a position visited previously using the same navigation system. Loran-C repeatable accuracy is sometimes as good as 18 meters and is usually better than 100 meters within the coverage area.
FUTURE OF LORAN-COutside theUS, the Coast Guard left individual countries to decide whether to continue their own operations.In 1997, an independent study was conducted in theU.S.to evaluate the impact of discontinuing Loran-C. Finally, onJune 29, 1998, a decision was made by FAA, USCG and OST to continue the operation of Loran-C beyond its currently planned12/31/2000-termination date.At the ICAO CNS/ATM implementation conference held inRio de Janeiro, the FAA dropped a bombshell by announcing, contrary to all earlier assurances, that the Global Positioning System (GPS) would not be approved for sole use navigation, and would need a backup.The reason given was that the possibilities of jamming, solar events, etc., were now better understood. Excellent though GPS may be, its problem is that it is so low powered that the signal can easily be blanked out or disrupted - as demonstrated atan1997Moscowair show where ajammerdestroyed the signal over a radius of 200 km.The notion of GPS as sole means of navigation is dead. Suitable backup systems cited are triple inertial, VOR/DME and LORAN-C.As of September 1998, the AmericanDoTconfirmed that the existing LORAN-C chains will be maintained and upgraded, at least to 2008, in the transition period to satellite based navigation.Lorans wavelength and signal strength enable it to penetrate into areas where GPS has difficulty because of line-of-sight blockage as in urban or forested situations. Loran can even penetrate some buildings.The most recent draft European Radio Navigation Plan (ERNP) and European Commission report (31/10/96) includes Loran-C as part of the desired system mix in marine, land transport and aviation to at least the year 2020.
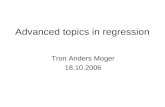
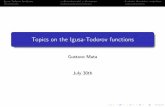
Satellite Navigation SystemsThe Global Positioning System (GPS)The Global Positioning System (GPS) is a worldwide radio-navigation system formed from a constellation of 24 satellites and their ground stations. The satellites are all in polar orbits unlike the geo-stationary INMARSAT satellites.
Thus the GPS satellites do not have a fixed position with reference to a position on earth. They are all moving in their orbits.The altitude is generally about 11000 km above the earth. GPS uses these man-made stars as reference points to calculate positions accurate to a matter of meters.TheNAVigationSatellite Timing and Ranging (NAVSTAR) GPS is an all weather, radio based, satellite navigation system that enables users to accurately determine 3-dimensional position, velocity, and time worldwide.The overall system consists of three major segments: the space segment, the ground control segment, and the user segment.The space segment is a constellation of satellites operating in 12-hour orbits at an altitude of 20,183 km (10,898 NM).The constellation is composed of 24 satellites in six orbitalplanes,each plane equally spaced about the equator and inclined at 55 degrees.The ground control segment consists of a master control centre and a number of widely separated monitoring stations.The ground control network tracks the satellites, precisely determines their orbits, and periodically uploads almanac ephemeris, and other system data to all satellites for retransmission to the user segment.The user segment is the collection of all GPS user receivers and their support equipment.More simply, the GPS Receivers position is determined by the geometric intersection of several simultaneously observed ranges (satellite to receiver distances) from satellites with known co-ordinates in space.The receiver measures the transmission time required for a satellite signal to reach the receiver.Transit time is determined using code correlation techniquesThe actual measurement is a unique time shift for which the code sequence transmitted by the satellite correlates with an identical code generated in the tracking receiver.The receiver code is shifted until maximum correlation between the two codes is achieved.This time shift multiplied by the speed of light is the receivers measure of the range to the satellite.This measurement includes various propagation delays, as well as satellite and receiver clock errors.Since the measurement is not a true geometric range, it is known as apseudo-range.The receiver processes these pseudo-range measurements along with the received ephemeris data (satellite orbit data) to determine the users three-dimensional position.A minimum of four pseudo-range observations is required to mathematically solve for four unknown receiver parameters (i.e., latitude, longitude, altitude, and clock offset).If one of these parameters is known (for example, altitude fixed) then only three satellite pseudo-range observations are required and thus only three satellites need to be tracked.The level of accuracy is up to 100 metres. However it depends whether the chatty being used to plot the position is using WG84 datum or not. If not then there may be corrections to be applied prior such GPS derived positions are plotted on the charts.Since the datum used is of so great a factor, it always prudenttocheck on the chart whether the chart is to WGS84 datum or other. The correction is usually printed on the chart, but if it is not then due caution is to be used since the GPS position in extreme cases can be found to be on land.
GPS Systems
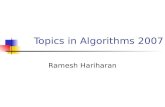
A GPS receiver measures distance from the satellite to a receiver using the travel time of radio signals.So we require:Precise andsynchronisedclocks to measure the time differenceThe whereabouts of the satellitesAnd any signal deterioration or bending due to atmospheric causes.Imagine a satellite transmitting in space.
Then there will occur at different distances from the satellite a measured time difference in the arrival time of the signal from the satellite.Therefore a receiver on the surface of the earth would by measuring the time difference between the departure of the signal from thesatelliteandthe arrival at the receiver, be able to make out the distance from the satellite.
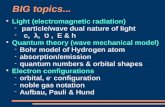
But how is the receiver going to be informed that the signal has left the satellite. So the receiver has to be informed of the time. This requires the receiver to have a precision atomic clock.The triangulation is done in the same manner as are all triangulations done. Thus if we assume that the satellite transmits in all directions including in space, then the signals from three such satellites will intersect at a point.But for this to happen the clocks on the satellites as well as on the receiver have to be atomic clocks, with absolutely NIL error ofsynchronisation.
But if the clocks are not absolutelysynchronisedas is the case, since equipping all the receivers with atomic clocks would make GPS beyond the means of everyone.The triangulation is done in the above way, taking into fact that the clocks are notsynchronisedand that the triangulation is IMPERFECT.In this case then the signals from 2 satellites would intersect as above. And a receiver anywhere in space would be in the shaded area where the two signals overlap.
With this IMPERFECT clock system then, if the third satellite signal is made to overlap then there will exist only two points in space where the receiver is placed.
Out of these two positions are separated by hundreds if not in thousands of miles, additionally one may be in space while the other will be on the earths surface.This since the signals from all three arereceived on the surface of the earth.Of course a fourth satellite signal would remove the discrepancy but since the triangulation is solved practically so the fourth signal is not needed for triangulation.We have now seen that a position is calculated from distance measurements to at least three satellites.Now the problem arises of measuring the distance to a satellite in spaceThis is done by timing how long it takes for a signal sent from the satellite to arrive at our receiver.The MathematicsIn a sense, the whole thing boils down to a velocity times travel time problem.This simple equation is all that is used:Velocity xTime=DistanceIn the case of GPS were measuring a radio signal so the velocity is going to be the speed of light300,000,000 metres per second.Synchronisationof Clocks:The time measurements are extremely short.(ofcourse longer than Radar)If a satellite were right overhead the travel time would be something like 0.06 seconds.The difference insynchronisationof the receiver time minus the satellite time is equal to the travel time.Thus we require really precise clocks.Even with precise clocks, what we require is a reference start time.Ina RADARwe get the reference from the time the signal pulse leaves the magnetron and the start of the sawtooth current in the CRT. There the time issynchronised. But for satellite signals, the Radio signals have reached a limit in speed.So the problem in GPS is how to have a reference instant.
In the GPS system, if we have a reference instant then the receiver just has to measure the delay in the signal reaching the receiver from the satellite and it could then compute the distance over which the signaltravelled.The GPS satellites transmit something called a PRC. This PRC is also generated within the receiver at the same time.The PRC from the receiver is matched with that received from the satellite and thus the receiver can easily compute the time delay, and thus the distance.
Rather than sending just any radio signal, the satellites send the signal as a code-Pseudo Random Code.Or to be exact aFalse Random CodeEach satellite has a unique PRCWhy Random?The Pseudo Random Code (PRC, shown above) is a fundamental part of GPS. Physically its just a very complicated digital code, or in other words, a complicated sequence of on and off pulses as shown here:The signal is so complicated that it almost looks like random electrical noise.Hence the name Pseudo-Random.
PRCThere are several good reasons for that complexity: First, the complex pattern helps make sure that the receiver doesnt accidentally sync up to some other signal. The patterns are so complex that its highly unlikely that a stray signal will have exactly the same shape.Since each satellite has its own unique Pseudo-Random Code this complexity also guarantees that the receiver wont accidentally pick up another satellites signal.So all the satellites can use the same frequency without jamming each other.And it makes it more difficult for a hacker to jam the system. In fact the Pseudo Random Code gives theUSa way to control access to the system.But theres another reason for the complexity of the Pseudo Random Code, a reason thats crucial to making GPS economical.The codes make it possible to use information theory to amplify the GPS signal. And thats why GPS receivers dont need big satellite dishes to receive the GPS signals.Each satellite transmits pseudo random noise spread spectrum signals on two different frequencies,L1 at 1575.42 MHz andL2 at 1227.6 MHz.L1 carries the coarse/acquisition code (CA-code) and a precision code (P-code).L2 usually only carries P-code, but could carry CA-code as well.The CA-code is a short sequence that repeats itself every millisecond, is different for every satellite, and is known and open to anyone who wishes to receive and decode it.The P-code, on the other hand, repeats every 267 days, and each satellite transmits a different seven-day segment before being reset.The P-code requires acryptologicalkey to decode, which is limited to US Department of Defense (DoD) and other approved users.This pseudo random noise can then be modulated, allowing multiple transmitters to use the samefrequency.
Synchronisingthereceiversclock and the satellite clock.If the clocks are not ticking in unison then there is no way the PRC can be compared for shift.Since the entire GPS is based on time difference, the clocks have to be very good, because if the timing is off by just a thousandth of a second, at the speed of light, that translates into almost 200 miles of error!On the satellite side, timing is almost perfect because they have precise atomic clocks on board.And the receivers here on the ground?Remember that both the satellite and the receiver need to be able to precisely synchronize their pseudo-random codes to make the system work.
If the receivers are equipped with atomic clocks (which cost upwards of $50K to $100K) GPS couldnt be affordable.
However the GPS as we know of do not have atomic clocks, but the receivers still are able to measure time with an atomic clock precision.The secret to perfect timing is to make anextrasatellite measurement.If three perfect measurements can locate a point in 3-dimensional space, then fourimperfectmeasurements can do the same thing.
Using the 4th.Satellite signal to make a timing correction.The 4thsatellite gets rid of the imperfect intersectionExtra Measurement Cures Timing OffsetIf the receivers clocks were perfect, then all the satellite ranges would intersect at a single point -position of the receiver.But with imperfect clocks, a fourth measurement, done as a cross-check, will NOT intersect with the first three.So the receivers computer finds that a discrepancy in time measurements.So thereceiversclock is not perfectly synced with universal time.Since any offset from universal time will affect all time measurements, the receiver looks for a single correction factor that it can subtract from all its timing measurements that would cause them all to intersect at a single point.That correction brings the receivers clock back into sync with universal time, and - youve got atomic accuracy time right on board.Once the receiver has that correction it applies to all the rest of its measurements and gets precise positioning.Thus all GPS receivers need to have at least four channels to make the four measurements simultaneously.So with the PRC as a timing sync pulse, and this 4thextra measurement, the receiver is perfectly synced to universal time, and thus can measure the distance to a satellite in space.However for the triangulation to work, the receiver needs also to know where in space the satellite is located.The receivers start with zero knowledgethey dont know where on the planet they are, or what time it is.Because of this, a good signal from three satellites is required to determine:current time,latitude, and longitude, anda fourth to also determine altitude.Any additional signals increase accuracy.Most modern GPS receivers are capable of receiving on 12 separate channels.P-code enabled receivers are able to benefit from having two different frequencies to lock onto.This is used to measure the effect the ionosphere is having on the signals and helps improve accuracy even further.Since the CA-code is only carried on one frequency, such measurements are not possible, so an estimate provided by the satellite is used.Triangulation based on the CA-code is known as the Standard Positioning Service (SPS), with the P-code-based system being called the Precise Positioning Service (PPS).
Until now we have assumed that the position of the satellites is known, so we have used them as reference points in space.But do we knowexactlywhere they are? After all theyre floating around 11,000 miles up in space.On the ground all GPS receivers have an almanac programmed into their computers that tells them where in the sky each satellite is, moment by moment.The GPS satellites are constantly monitored by theUS.
They use very precise radar to check each satellites exact altitude, position and speed.The errors are called ephemeris errors because they affect the satellites orbit or ephemeris.These errors are caused by gravitational pulls from the moon and sun and by the pressure of solar radiation on the satellites.The errors are usually very slight but they must be taken into account.
Once the new position of the satellite is determined it is sent to the satellite which includes its newpositionasan information packet with its timing signal.So the position of the satellite is continuously updated at the receiver also.Thus the PRC also contains anavigation messagewithephemerisinformation as well.
As a GPS signal passes through the charged particles of the ionosphere and then through the water vapour in the troposphere it gets slowed down abit,and this creates the same kind of error as bad clocks.There are a couple of ways to minimize this kind of error. For one thing we can predict what a typical delay might be on a typical day.This is called modeling and it helps but, of course, atmospheric conditions are rarely exactly typical.Another way to get to these atmosphere-induced errors is to compare the relative speeds of two different signals.
This dualfrequency measurement is very sophisticated and is only possible with advanced receivers.The GPS signal may bounce off various local obstructions before it gets to the receiver.This is calledmultipatherror and is similar to the ghosting you might see on a TV.Problems at the satelliteThe satellites also do have to account for some tiny errors in the system.The atomic clocks they use are very, very precise but theyre not perfect. Minute discrepancies can occur, and these translate into travel time measurement errors.And even though the satellites positions are constantly monitored, they cant be watched every second.So slight position or ephemeris errors can sneak in between monitoring times.
Geometric Dilution of Precision or GDOP.This depends on the number and the geometry of the satellites used.If four satellites are clustered near each other, then one meter of error in measuring distance may result in tens or hundreds of meters of error in position.But if many satellites are scattered around the sky, then the position error may be less than 1.5 meters for every meter of error in measuring distances.The effect of the geometry of the satellites on the position error is called Geometric DilutionOfPrecision (GDOP), which can roughly be interpreted as the ratio of the position error to the range error.Imagine the tetrahedron that is formed by lines connecting the receiver to each satellite used.The larger the volume of this tetrahedron, the smaller (better) the GDOP.In most cases, the larger the number of satellites the smaller the GDOP.Intentional ErrorsThe policy of Selective Availability or SA and the idea behind it was to make sure that no hostile force or terrorist group can use GPS to make accurate weapons.Basically theDoDintroduced some noise into the satellites clock data which, in turn, added noise (or inaccuracy) into position calculations.TheDoDmay have also been sending slightly erroneous orbital data to the satellites, which they transmitted back to receivers on the ground as part of a status message.US military receivers used a decryption key to remove the SA errors and so theyre much more accurate.Turning Off Selective AvailabilityOn May 1, 2000 the White House announced a decision to discontinue the intentional degradation of the GPS signals to the public beginning at midnight.Civilian users of GPS are now able to pinpoint locations up to ten times more accurately.
Sources of Errors for a signal from the satellite:Satellite clocksEphemeralAtmosphericMultipathReceiver clocksThe GPS receivers use timing signals from at least four satellites to establish a position.Each of those timing signals has some error or delay depending on the climatic conditions experienced before reaching the receiver.Since each of the timing signals that go into a position calculation has some error, that calculation is going to be a compounding of those errors.DIFFERENTIAL GLOBAL POSITIONING SYSTEM (DGPS)
The satellites are so far out in space that the little distances we travel here on earth are insignificant.
So if two receivers are fairly close to each other, say within a few hundred kilometers, the signals that reach both of them will havetravelledthrough virtually the same slice of atmosphere, and so will have virtually the same errorsOne receiver measures the timing errors and then provides correction information to the other receivers that are roving around.That way virtually all errors are eliminated from the system, even if the Selective Availability error is brought in, it would be of no use.The idea is simple. Put the reference receiver on a point thats been very accurately surveyed and keep it there.This reference station receives the same GPS signals as the roving receiver but instead of working like a normal GPS receiver it attacks the equationsbackwards.
Instead of using timing signals to calculate its position, it uses its known position to calculate timing. It figures out what the travel time of the GPS signalsshouldbe, and compares it with what they actuallyare. The difference is an error correction factor. The receiver then transmits this error information to the roving receiver so it can use it to correct its measurements.
Since the reference receiver has no way of knowing which of the many available satellites a roving receiver might be using to calculate its position, the reference receiver quickly runs through all the visible satellites and computes each of their errors.
Then it encodes this information into a standard format and transmits it to the ship receivers.The ship receivers get the complete list of errors and apply the corrections for the particular satellites theyre using.
The Maritime and Port Authority of Singapore has set up facilities to broadcast differential GPS signal with effect from 9 Oct.1997.The aim of providing the DGPS broadcast service is to further enhance navigational safety.The service is free of chargeThe DGPS service is provided via a marine radio beacon operating in the MF band at298kHzat a transmission speed of 100 bps.The system provides reliable all weather and round the clock DGPS data with 99% availabilityThe DGPS reference station of a channel dual frequency (L1 & L2) GPS receiver, a MF radio beacon transmitter, an integrity monitoring station, remote control facilities and back up facilitiesThe DGPS Reference Station is at a known fixed position and equipped with sophisticated GPS receivers.The Reference Station would compare the positions received from its DGPS receiver with that of the known position and then generate DGPS data.The DGPS data is digitally modulated, using Minimum Shift Keying (MSK), and output via a MF radio beacon transmitter.The integrity monitoring station would verify the DGPS signals accuracy and ensure that the system provides timely warnings to the users if and when the system data should not be used.The DGPS data propagates in the ground wave mode and the system is designed with a range of 200 km.The positioning accuracy achievable ranges from 5 m to sub-meter accuracy, depending on the type of receiver used.The DGPS signal could also be received inland, offering the same benefits to GPS users on land and in the air.Technical Details of theDifferential GPS Reference StationStation ID: 65Frequency:298kHzBit Rate:100bpsModulation:MinimumShift Keying (MSK)Data Format:RTCMSC-1 04 Version 2.0Range:200kmMessages:RTCMTypes 9-3, 16, 3, 5 and 7Facilities:IntegrityMonitoring, Remote Control and Back-Up facilities.The navigation data message enables a receiver to calculate the position of each satellite at the time of transmission of the signal.From this information, the user position co-ordinates (Lat/Long) and the user clock bias (error) can be calculated using simultaneous equations.Four satellites are normally required to be simultaneously in view of the receiver for dual-dimensional (3-D) positioning purposes.The following paragraphs give a brief description of the GPS satellite signals and GPS RCVR operation.GPS navigation MessageThe data includes information required to determine the following:Satellite time of transmissionSatellite positionSatellite healthSatellite clock correctionPropagation delay effectsTime transfer to UTCConstellation statusGPS navigation MessageThe navigation message is transmitted by the satellite on the L1 data link at a rate ofof50 bps.It is made up of fivesubframes,subframe1, 2, 3 contain 10 words, each word have 30 bits.So eachsubframebeing 300 bits long.Subframe4, 5 aresubcommuated25timeeach.Everysubcommuatedpage has 10 words and 300 bits long.Each 30 bits word contains 24databits and 6paritybits, the parity bits can all be stripped, so every word may have 24bit (3 bytes) useful.
GPS navigation MessageAccording to GPS standard position service (SPS) signal specification, the structure within the navigation message is as per following table:Table 4.NavmsgSUBTotalElapsedFRAME030300bitstime1TMLHOWCLOCK CORRECTION DATA3006 sec.2TMLHOWephemeris of transmitting satellite I60012 sec.3TMLHOWephemeris of transmitting satellite II90018 sec.4TMLHOWpage n 0f 25 - messages,ionosphere, UTC, etc120024 sec.5TMLHOWpage n 0f 25 - almanac,healthstatus, etc150030 sec.Note: ThesubframeID number is part of the HOW word.TML :Telemetry MessageTable 5.TelemeterymessageOne word = 30 BITS, 24 DATA, 6 PARITYword030300Total bits1TML8-BIT PREAMBLE24-BIT DATA6-BIT PARITY
HOW :HANDOVER WORDOne word = 30 BITS, 24 DATA, 6 PARITYTable 6.HANDOVER WORDword030300Total bits1HOW17-BIT TIME OF WEEK7-BIT DATA6-BIT PARITYThe Navigation MessageThe NAV-msgis superimposed on both the P-code and the C/A-code with a data rate of 50 bits/sec.The NAV-msgcontains 25 data frames, each frame consisting of 1500 bits.Each frame is divided into 5 sub frames of 300 bits each.It will therefore take 30 seconds to receive one data frame and 12 /2 minutes to receive all 25 data frames.Sub frames 1, 2 and 3 repeat the same 900 bits of data on all 25 frames.This allows the receiver to obtain critical NAV-msgdata within 30 seconds.This ensures that the receiver need not wait for a long period (12 to 15 minutes) to provide the first position.It can do so within the first minute.The data in the NAV-msgis normally valid for a 4 hour period.The NAV-msgcontains GPS system time of transmission, a Hand Over Word (HOW) for the transition from C/A to P-code tracking, ephemeris (almanac) and clock data for the particular satellite being tracked, and almanac data for all the satellite vehicles (SVs) in the constellation.Additionally, it contains information such as satellite health, coefficients forionosphericdelay model for C/A-code users, and coefficients to calculate Universal Coordinated Time (UTC).
ACCURACY AND ERROR SOURCESAccuracy of GPS RECEIVERSThe following factors influence the final positioning accuracy obtainable with GPS:The precision of the measurement and the satellite geometry.The measurement processing technique adopted.The accuracy with which atmospheric andionosphericeffects can be modeled.The accuracy of the satelliteephemerides.Accuracy of GPS RECEIVERSGPS exhibits statistical accuracy distributions because of two important parameters, which are continuously variable.(a)TheUserEquivlantRangeError (UERE)(b)The Dilution of Precision (DOP)UERE is a measure of the error in the range measurement to each satellite as seen by the Receiver.UERE tends to be different for each satellite and tends to be at a minimum following an upload.Accuracy of GPS RECEIVERSDOP is a measure of the error contributed by the geometric relationship of the satellites as seen by the Receiver.DOP varies because the satellites are in constant motion and their geometric relationships are constantly changing.The above two errors are constantly present as normal variations in Accuracy, even without failures in the satellites, Control Segment or Receiver.
Echo SounderBasic PrincipleShort pulses of sound vibrations are transmitted from the bottom of the ship to the seabed. These sound waves are reflected back by the seabed and the time taken from transmission to reception of the reflected sound waves is measured.Since the speed of sound in water is 1500 m/sec, the depth of the sea bed is calculated which will be half the distancetravelledby the sound waves.COMPONENTSBasically an echo sounder has following components:Transducer to generate the sound vibrations and also receive the reflected sound vibration.Pulse generator to produce electrical oscillations for the transmitting transducer.Amplifier to amplify the weak electrical oscillations that has been generated by the receiving transducer on reception of the reflected sound vibration.Recorder-for measuring and indicating depth.CONTROLSAn echo sounder will normally have the following controls:Range Switch to select the range between which the depth is be checked e.g.0- 50 m, 1 100 m, 100 200 metc.Always check the lowest range first before shifting to a higher range.Unit selector switch to select the unit feet, fathoms or meter as required.Gain switch to be adjusted such that the clearest echo line is recorded on the paper.Paper speed control to select the speed of the paper usually two speeds available.Zero Adjustment or Draught setting control the echo sounder will normally display the depth below the keel.This switch can be used to feed the ships draught such that the echo sounder will display the total sea depth.This switch is also used to adjust the start of the transmission of the sound pulse to be in line with the zero of the scale in use.Fix or eventmarker-this button is used to draw a line on the paper as a mark to indicate certain time e.g. passing a navigational mark, when a position is plotted on the chart etc.Transducer changeover switch in case vessel has more than one switch e.g. forward and aft transducer.Dimmer to illuminate the display as required.More on the principle of Echo SoundingEcho sounder equipment makes use of sound (or sonic) waves, which differ from radio waves in several ways. Sound waves vibrate in the direction of travel of the wave front Sound wave velocity is comparatively low (in comparison with radio waves). Sound waves can travel through a material medium such as a gas, a liquid or a solid, but not a vacuum.Sound waves can be produced over a very wide range of frequencies, and these waves exert definite pressure variations, which under certain circumstances can be measured. The audible frequency or frequencies that human beings can detect varies, but an approximate range of detection (also called as the normal range) can be considered as lying between about 20 Hz to 20,000 Hz. Those above the normal range of the human ear are termed ultrasonic or supersonic frequencies.There is a loss of energy when any waves are transmitted through a medium and the losses increase as the frequencies increase. Sound waves also sufferlosses,however in water such losses are of the order of 1000 times less as compared to the loss in air. Supersonic vibrations are therefore much more suitable for transmission in water than in air. The losses do increase due to highfrequency,however they do not become serious unless very high frequencies are used.Water is an excellent sound transmitting medium as the velocity of sound in the water is known accurately and it does not vary more than about 3%, if temperature and salinity change.The speed of sound increases as water temperature, salinity and water pressure increases, and all of the above vary with depth. The speed of sound varies from about 1432 metres/sec. in fresh water, to about 1535 metres/sec. in salt water of high salinity. For depth sounding equipment design purpose a sound speed value of 1500 metres/sec. are assumed.For normal applications on merchant vessels, the indication of the depth value based on the average speed of sound (1500 m/sec.) causes a minor error when changing from Salt Water (SW) to Fresh Water (FW). Assuming there is a small correction adjustment for SW, the true depth in FW is found to be about 3% less than the indicated depth. As can be seen, this deviation is very small and thus insignificant for practical considerations.When sound wave passes through an interface of two mediums, besides suffering loss of energy, they refract as well as reflect (critical refraction) at the boundary where the two media meet.The Practice of Echo SoundingThe echo sounding principles is used as follows, to measure depth. A short sound pulse is transmitted from the ship's bottom towards the seabed where it is reflected back towards the hull as an echo.The time interval between transmission of the pulse and the receipt of the echo is measured, and the depth is found from the expression:Depth = velocity X time divided by 2The frequency of the sound vibrations created in the water during pulsing is usually at the upper end of, or above the audible range. A depth sounder instrument can be obtained in three different forms based on the transmitted frequency:.1using 14khzfrequency (Low end sounders).2using 14 kHz to 30 kHz frequency (Normal sounders).3using 30 kHzfrequency(High end sounders)The choosing of frequency depends on the requirements of the user. The chosen frequency is basically a compromise to avoid interference from audible ship motion noise, and water losses through the seawater.Generally low frequencies are mostly affected by ship noise and high frequencies by water losses, which are caused by absorption.The sound pulses are created by transducers, which convert electrical energy on transmission, and reverse the process when the echo is received. The sound energy is always transmitted as a beam in a particular direction (directional beam) and it would be very wasteful to permit spherical radiation.Transducers are of two types:Piezo-electric transducerMagneto-strictiontransducer.Piezo-electric transducerThis type makes use of the special properties of crystals (e.g. crystals of barium-titanateand leadzirconate). If an alternating voltage is applied to the opposite faces of a flat piece of one of the above materials, the crystal will expand and contract, and hence vibrate creating sound waves for as long as the vibrations continue. The process is reversible, i.e. when varying pressure from a returningecho,is applied to the opposite faces, an alternating voltage is generated across the faces and the same can be further amplified and used to activate an indicator.Magneto-strictiontransducerIn this type, the use is made of the magneto-strictioneffect which is a phenomenon whereby magnetization of ferromagnetic materials produce a small change in their dimensions, and conversely the application of mechanical stresses such as weak pressure vibrations, as from an echo to them, produce magnetic changes in them; e.g. a nickel bar when placed in the direction of or strength of the magnetic field. If the nickel bar is placed in a coil with an alternating current flowing through it (a solenoid), the varying current and magnetic field will cause the ends of the bar to vibrate and hence create a sound wave. This is what happens when the transducer is transmitting.Type with specs 50 kHz - 100 W: Maximum depth measurable - 700 metres Type with specs 20 kHz - 100 W: Maximum depth measurable - 400 metresThe magneto-strictiontype would be fitted inside a cast elliptical housing or a circular housing in such a way that the bottoms of the pistons are in contact with the sea (i.e. pierced hull type - see details of this type later).Another type, which is fitted internally, consists of a ring of thick nickel discs enclosed in a winding to which the AC is applied. This resulting sound pulse is directed downwards through the steel bottom shell by a reflector. The advantages of nickel ring types are that it is cheaper to construct and damping is greater.In both designs the sound pulses are directed down wards in a cone shaped beam to avoid loss of sounding when the vessel is rolling. The process is reversible, as, when the echo returns, it applies a varying pressure to the working faces of the transducer, which causes the magnetic condition of the nickel to fluctuate at the same frequency. This varying magnetic field strength induces a voltage in the winding round each piston leg and this voltage is amplified before being applied to the indicator.As oscillators must be in water dry forepeak tanks.Tanks may be flooded sufficiently to-keep them submerged. Forepeak tanks are usually arranged so that when they are pumped out, enough water is retained to keep the oscillators from becoming dry.Echo sounding equipments may be divided into two main classes:.1Thosethat transmit and receive sound vibration through the shell plating of a ship, referred to as 1nternal installation" class..2Those that are in direct contact with the sea generally referred to as "pierced-hull installation" class.In the internal installation class, because of the shell plating, energy is wasted during transmission and reception. For a shell plating thickness of 9.5 mm, about 15 per cent of the energy gets through the plate and only 2 per cent gets through when the shell plating is 31.8 cm thick.The advantages of having an internal installation are:.1Equipmentmay be fitted without dry-docking the ship..2Projectors or oscillators may be serviced or changed while the ship is afloat.Sound wave energy is wasted if it is required to pass through a plate. The plate will prevent sound waves to pass through, if the thickness of the plate is close to a quarter wavelength of the sound wave; but if thickness of the plate is about a half wavelength then the steel plate becomes transparent to the sound wave.For a pierced-hull installation, the shell plating of the ship is first pierced and the gap filled in by a thinner plate. If a steel plate is to be fitted, then the physical dimensions of the steel plate needs to be small and the plating will have to vary in thickness from ship to ship because of different frequencies used.Thus for pierced hull installation the problem of using a frequency suitable for reasonable penetration no longer applies and higher frequencies can be used.With a very low frequency, the size of the oscillator becomes inconveniently large; secondly, there is lack of selectivity from water and other noises within the audible range and finally, less directivity.The higherfrequencies givesmore improved selectivity from noise and better directivity is possible, but there is less penetration.Echo Sounding - Full cycle of operationThe full cycle of operations for one sounding is as follows:The recording stylus starts each cycle as it moves pass the zero. It triggers an electronic generator, which produces a known number of electrical oscillations, which are applied to the transmitting transducer (Tr/Tx). TheTr/Txcreates the sound pulse, which is injected into the sea, travels to the bottom, is reflected and returns as an echo to the receiving transducer, where it is converted back into an electrical pulse. This is amplified and applied to the stylus, which has moved across the recording paper, to indicate the depth against a suitable scale. The stylus moves across the paper at a constant speed which is decided by the designer after he has decided the following:Maximum depth to be displayed,Width of the paper and the SW velocity to be used.The pulse length to be used for transmission is governed by a number of factors. The minimum theoretical depth that can be measured is equal to half a pulse length. Since sound travels at approx. 1500 metres per second, a pulse length of 1millisec(ms) will mean that the theoretical minimum depth, which could be measured, would be 1.5 metres. In practice it would be about this value.The difference between the theoretical and the practical values is because the transducer being a resonant device does not stop oscillating immediately the electrical pulse ceases. It shows a tendency to "ring" whenenergisedand this is usual for the time taken for 10 to 12 cycles. If depths less than 1.5 m are to be measured then a shorter pulse length is required. One sounder has a pulse length of 0.3 m, which gives a theoretical minimum sounding of 0.225 m and a practical minimum of 0.45 m.If a very deep measurement is to be made then more energy is required. This could possible be achieved by increasing the amplitude of the pulse, but this is usually limited by the output of the active element in the transmitter and therefore it is injected directly into the water. Sounders, which have to cover very shallow and very deep sounding on different ranges, will usually be designed so that the pulse length can be changed as the range is changed.PULSE LENGTHShallow0.3millisecUp to 200 or 400 metreslto 5millisec2000 metres or moreThe commonest form of echo sounder has a display, which records the depth on electro-sensitive paper. It may take the form of rotating arm moving anti-clockwise across the paper, which is marked by the stylus at the end of the arm when a DC pulse is applied on receipt of the echo. Another type has a moving belt to which the stylus is attached and which is made to move across the paper from top to bottom at a constant rate, which is decided by the depth scale displayed. The paper is marked in the same way, and the indicated depth is measured from the top of the paper by a suitable vertical scale at the side.Another type of display more suitable for shallow depths consists of a disc or arm carrying a neon lamp at its extreme edge, which is spun round at constant speed. A scale is fitted round the edge of the area covered by the spinning neon which is made to flash at zero on transmission and again on receipt of the echo at the point in its revolution appropriate for the depth measured. The overall recording accuracy claimed for one echo sounder is close to +/- 2% of the actual depth.Recording Paper may be of two kinds, moist and dry. The moist paper is impregnated with a solution of potassium iodide and starch. When a direct current is passed through it from the stylus to the metal plate at the back, it releases iodine and causes a brown stain to appear. The stylus is tipped with iridium. This action only takes place when the paper is damp - it becomes an insulator when dry.This type of paper should be kept in its airtight tins before use. If an echo trace on damp paper is to be kept for reporting or other purposes, a line should be drawn down each side of the paper while it is still damp to indicate the limits of the scale. The bottom trace and transmission line should be drawn in pencil, the paper dried, preferably in a dim light, and then the paper should be rolled up to prevent fading. An indelible pencil should preferably be used or a ballpoint pen for all writing.The Dry paper is a carbon impregnated paper base,metallisedon one side and covered on the other with a very thin film of fight coloured semi-conducting chemical. Themetallisedside makes contact with the metal plate at the back, and the stylus moves over the chemically treated side. When the echo returns, a pulse of current is applied to the stylus which destroys the chemical film and exposes carbon beneath to show a black record in contrast to the gray paper, carbon dust and possibly fumes will be released and these may be a health hazard. The recorder must be sited so that adequate ventilationitspossible. The dust, which is deposited on parts of the recorder must be removed at require intervals using a soft rag or brush.TRANSDUCER SITINGSatisfactory operation of an echo sounder depends on the transmission and reception of the largest possible signal for a given amount of power. The siting of the transducer is important in this respect to reduce attenuation on transmission and reception as far as possible. The ideal position is one in which there is "solid" water free from aeration beneath the transducer, and where the effects of surface, engine and propeller noise are at a minimum. There are few positions which are suitable in every respect and a position found to be satisfactory in one design of ship will not necessary give equally good results in another.The principle source of aeration is the bow waves created by the ship. This wave rises some way up the stem, curls over, and then is forced down beneath the ship, taking a quantity of air with it.The resultant bubble stream normally starts about a quarter length of the ship from the stern, and divides about three quarters of the length from the bow. The bubble stream varies in form and intensity according to the speed, draught, shape of bow and hull, the trim of the ship as well as the sea state. In ships with a bulbous bow the wave appears to dip water just abaft the stem, so that the flow of bubbles is over almost the whole length of the vessel and the only satisfactory forward site may be within the bulb. In oil tankers the after position is invariably chosen, usually under the fore part of the engine room. Classification Society Lloyd Register does not permit oscillators to be fitted underneath cargo space on vessels classed for carrying petroleum in bulk.A position in the forepeak may appear to be the best, but in bad weather and light ship it would be unlikely to give good results and may also be difficult to fit there. In laden ship of normal design a position about a quarter of the length from the stem will often be found to give satisfactory results. Ships often making long passages in ballast e.g. tankers, often find an after position about three quarters of the length from the stem gives better results. If two are fitted, one is fitted at one quarter and one at three quarter length abaft the stem.Care must be taken to make sure a receiving transducer is a sufficient distance from the propeller, and tests should be carried out to ensure this. They need to be sufficiently separated to prevent interaction between them, but the separation should be as small as possible to ensure accurate sounding in shallow water. Positions either side of the keel is often satisfactory.Other factors, which should be borne in mind, are: fit in a horizontal position, sometimes slightly projecting but faired off to avoid aeration. Avoid sites near bow thruster units, water intake pipes and underwater log units.Internal access to the transducer should be possible for maintenance. Any junction box should be in a dry space and if possible the transducer should be in a dry place.NOISEAll transmission systems are subjected to interfering signals of some kind.CROSS NOISEIt is caused by vibration of the energy, which is transmitted out by a ship and goes directly to the echo sounder receiver. The recorder shows a broad line on zero reading and this can mask echoes totally.THERMAL NOISEIt is generated in electronic devices by random movement of electrons in components and this is amplified in the receiver in any radio system. In sonar system, using sonic waves below 50 kHz, noise level can usually be ignored, as it is very small compared with the sea noise.SEA NOISEThey are of two main kinds, the first are interfering wave action, and may be thought of as background noise. Sources are fish, other ships, and noise from one's own ship particularly in bad weather and close to land. For most purpose, the amplitude of disturbances at any instances is unpredictable and taken, as a whole may be considered random. For this reason, the designer must make sure that the signal is alwaysrecognisableabove the noise level.The second is noise produced by the interaction of the sea and the sonar system. This is generally called "reverberation noise" and when transmitted into water, all the small reflectors in the water such as bubbles, marine life, and mud and sand particles immediately affect it.These multiple reflector produces a return signal (echo), which is theoretically continuous since they exist at all depths. However the intensity of the transmitted pulse is reduced as it moves away from the transducer and the intensity of the return signal also reduces in accordance with the same law. The result is that after the end of transmission, the reverberation signal decreases with time according to an inverse square law. Its effect can be considerably reduced by the use of time variable gain or "initial suppression". This circuit is set to reduce the gain of the receiver to a very low level immediately following transmission, but then allows the gain of reverberation noise after the same has fallen below that of background noise.Interpretation of SoundingFalse Bottom Echoes.Second Trace EchoesEchoes, which are received at a properly adjusted sounder, until after the stylus has completed one or more passes across the paper and the next pulse have been, transmitted cause false readings. Example of one revolution represents 1600 metres, and an indicated depth of 50 metres could be sounding of 50 or 1650 or even 3250 metres. The correct depth can be ascertained if the transmission circuit can be switched off with the stylus still moving. After switching off, on the switch and then count the number of times the stylus crosses the paper before the echo re-appears.Reflection echoesa) Double EchoesEchoes received after reflection from the seabed, but which the hull or the sea surface back to the bottom and then reflects thence to the transducer. They produce a second weaker echo at approximately double the correct depth. It will fade out if sensitivity is reduced (may be received up to several hundreds metres).
b) Multiple EchoesEchoes received after being reflected several times between the seabed and the surface or the ship's bottom before the energy is lost. It causes equally spaced echoes on the trace. Reduce sensitivity to fade out. Switch on to first phase and then phase deeper to locate first echo.c) Variable EchoesThese are varying reflecting surfaces on the seabed. In general hard sand, coral, chalk and rock are good reflectors and thick mud is a poor reflector. Stepped formation of rock result in side Echoes from an object not immediately below the vessel but whose slant depth is less than the depth of water.d) Electrical faults, or man made noises.Other False EchoesThese do not normally obscure the bottom echo and may be caused by.1Shoals of fish.2Layers of water of differing sounding velocities (salinity etc.).3The deep scattering layer, which is a layer or set of layers, in the ocean, believed to consist of plankton and which attenuate, scatter and reflect sound pulses. They lie between about 300-450 metres below the surface by day, and near the surface between sunset and sunrise (by day, it is more pronounced when the sky is clear, than when overcast)..4Kelpor weed..5Turbulence from the interaction of tidalstreams or eddies with solid particles in suspension.SPEED ERRORThe speed of the recorder motor must be proportional to the velocity of sound in seawater and the velocity is known to vary. The recorder motor running at an incorrect speed causes the speed error. If the motor speed is too fast, it will record a greater depth and if it is too slow than a lesser depth.Other errors include Pythagoras error, error due to maladjustment, ECHO SOUNDERCONTROLSMainsDimmerRange/Phasing/ scaleGainOther controlsSpeed controlZero adjustment/Draught settingChange over transducerMinimum depth alarmPULSE lengthNumber of pulses per sec.Checks on echo soundersTwice yearly with hand lead, if reading is too high, then motor is going too fast.ERRORSVelocity Error - Increase in temperature and salinity of water increases velocity of sound in water thus giving rise to an error in the depth displayed.Aeration Presence of air bubbles below the transducer gives rise to false echoes. Air bubbles are normally caused when a vessel goes astern, turbulence when rudder is put hard over or due to pitching when vessel is in light condition.Multiple echoes This is caused in shallow waters with a rocky bottom due to some of the sound pulses reflecting up and down between the ships keel and the sea bottom before being recorded on the display. The first echo is the correct reading.False echoes In deep waters, by the time the sound pulse returns from the bottom, the stylus may have alreadyfinishedmorethan one revolution and thus the echo which will be recorded will be a false one and the depth indicated will be much lower than the actual depth.Pythagoras Error If the vessel has one transducer for transmitting and one transducer for receiving, separated by some distance, the distancetravelledby the pulse will be greater than the depth of the sea bed in shallow waters.MISCELLANEOUS
Comply with the maintenance instructions given in the manual.Normally it is just a monthly cleaning of carbon / dirt deposits from the inside of the recorder.Keep a stock of at least 1 spare stylus and 3 months stock of recording paper.Compare the soundings obtained with the soundings given in the chart.Maintain a log to enter the soundings obtained.Some echo sounders have an alarm to alert the navigator when the sounding goes below the set sounding.
Speed LogsThe Impeller LogThis type of log is usually fitted in small crafts.The standard equipment consists of the following1.The log tube assembly2.The amplifier3.Speed indicator and distance counterThe sensing device is at the end of a long-tube or probes, consisting of a small device called impeller (the dynamic element could be either a small propeller or a paddle or a screw) at the end of the probe, which is lowered into the water.The tube is set with the port (opening) facing forward.The water flow drives (or turns) the impeller and the rotation of the impellerinducesan electrical signal, which is picked up at the coils. The output is fed to the amplifier and is used to operate the speed indicator. The rotating impellor's signal could also be used to provide a distance measurement.When speed (or distance) measurement is required, the log is lowered into the water, and when not in use, is retracted inside the hull. Retraction of the log can be done manually or by a remote hoisting arrangement operated from the navigating bridge or engine room.The log-tube may become blocked or obstructed by foreign bodies such as small fish, seaweed etc. The arrangement allows the whole tube to be withdrawn inside the vessel for inspection and cleaning. In the event of the log-tube being bent by hitting an underwater obstruction such as a sand bank or a large fish or more often caused by a wire or a rope having passed under the vessel, the log-tube must be jettison.
This type of log can give only speed through water and is greatly affected by the current flowing under the ship.The Pressure type log (Pitottube Log)This type of log consist of1.Two openings outside the hull of the ship, static tube that provides static pressure andimpact orPitottube that measures dynamic pressure or the water flow of pressure2.Controller unit (pressure differentiator)3.Speed and distance transmitter4.Speed and distance recorder
OperationsThe opening of thePitottube faces forward so that when the vessel moves forward, the water causes a pressure at the tube this dynamic pressure is proportional to the speed at which the vessel moves. The pressure differentiator measures the differential pressure. The Controller unit converts the pressure difference into speed and distance units.
This type of log can give only speed through water and is greatly affected by the movement of the water which would induce an extra pressure giving rise to error in readings.ELECTRO MAGNETIC LOGSThis type of log consist of1. Master Indicator2. Preamplifier3. SensorOperationsThe sensing of speed makes use of law of electromagnetic inductionWhen the ship moves, the water passing through the hull acts as a conductor.The magnetic field is produced by a solenoid, installed in such a way as to allow the field to extend into waterThis produces an EMF (electromagnetic force), which is measured and converted into the speed of vessel through the water.
Principle
The electromagnetic log is based upon the Faraday-Maxwell induction law;Figureshows the principle of the log.The inducede.m.f. E is given by the following:E = F x L x VWhere F = the magnetic fieldL = the length of the conductorV = the velocity of the conductor through the magnetic field.In the EM log a direct current through the windings of a coil, generates a magnetic field. If the conductors do not move relative to the coil they do not intersect the magnetic fines of force and no voltage is induced in them.In the EM log the F and L are maintainedconstants,therefore the inducede.m.f. is directly proportional to the velocity V, which is the velocity of the vessel through the water.The direction of the voltage E depends on the directions of the lines of force and the direction of the velocity of the conductor water. According to the formula the induced voltage is proportional to the velocity V.Should the velocity have the opposite direction, the direction of the voltage would change too.The electromagnetic log is based upon the Faraday-Maxwell induction law;A direct current through the windings of acoil,generates a magnetic field.Four conductors (ab,bc,cdand da) are arranged in the form of a loop around the coil.If the conductors do not move relative to the coil they do not intersect the magnetic lines of force and no voltage is induced in them.
Alternating current through the coilInstead of a direct current, suppose that we send analternatingcurrent through the coil. Then the induced voltage that we will have would be also an, alternating voltage with amplitude that is proportional to the velocity, V.For the electromagnetic log an alternating voltage is preferred to a direct voltage.The speed out put from an EM log depends upon the water flow by way of the sensors. Thus siting of the probe is critical. This is so since if too close to the hull then due to the non-linearity of the hull form the speed of the water flow may give a wrong representation of the vessels speed. This is minimized by careful siting of the sensor as well as by calibrating the instrument while installation.Pitch and roll also give rise to errors however these are reduced by having an electrical time constant that is longer than a period of vessel motion.A well-adjusted log can have an accuracy of better than 0.1 percent of the speed range
This type of log can give only speed through water and is greatly affected by the current flowing under the ship. However if the water is stationary at an anchorage there will be no speed shown.In all the above logs theflow of water past and under the hull playa major part in the accuracy of the readings.
DOPPLER LOG
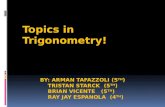
Examples of the Doppler phenomenon with sound:The Doppler principle is the effect, which makes the tone of a fire engine change as it passes the observer.The fire engine is continuously emitting sound waves but if it is moving towards the observer the wave fronts arrive closer together, which is equivalent to a higher frequency.As the fire engine starts to move away from the observer, the wave fronts arrive less frequently at the observer and the tone is of a lower frequency.As the train approaches a stationary listener, the pitch (frequency) of the rumbling sound of the train is higher than when the train passes by, at which time the pitch sounds the same as if the train were stationary.As the train recedes from the listener, the pitch decreases.Electromagnetic waves radiated by radar, as well as sound waves, obey the Doppler principal, although electromagnetic waves travel at the speed of light and audio waves travel at the speed of sound.The Dopplereffectis a frequency shift that results from relative motion between a frequency source and a listener.If both source and listener are not moving with respect to each other (although both may be moving at the same speed in the same direction),no Doppler shift will take place.If the source and listener are moving closer to each other, the listener will perceive a higher frequency - the faster the source or receiver is approaching the higher the Doppler shift.If the source and listener are getting farther apart, the listener will perceive a lower frequency - the faster the source or receiver is moving away the lower the frequency.The Doppler shift is directly proportional to speed between source and listener, frequency of the source, and the speed the wave travels.In above figure v is the velocity of sound, and the propagation speed is c, every wave is shortened due to the movement of the source by d
This shortening is equal to the source having moved a distance during the time required to generate the wave.The Doppler log is based on measurement of the Dopplereffect.
It is seen that an observer, moving with a source of sound towards a reflecting plane, receives a frequency:Where fv is the received frequency, f the transmitted frequency,cthe speed of sound and v the speed of the source of sound.By measuring fv and knowing f and c, the speed of a ship with regard to the seabed can be determined.
PrincipleA transmitting transducer below the ship continuously emits a beam of sound vibrations in the water at anangle(usually 60 to the keel) in the forward direction.A second transducer aboard receives the echo caused by diffuse reflection from the seabed.A Doppler log uses a higher frequency than an echo sounder.Advantages:1.Theresulting shorter wavelength leads to the more diffuse reflection desired; the echo from aspecularreflection would not be received, in view of the oblique incidence of the beam.2.Theshorter wavelength makes possible a smaller beam-angle and so avoids the dimensions of the radiating face of the transducer becoming too large.3.Theemitted power of the sound vibrations spreads less and thus the echo is stronger.Every point of the seabed is hit by the beam and causes a stronger or weaker echo in the direction of the receiving transducer.All these points are situated at a different angleato the horizontal direction;The frequencies received aboard must differ for all these points.However, the average frequency is approximately that from point P, at an angleato the horizontal.Hence,though the distance between the ship and the seabed does notchange, the received frequency will differ (owing to the Dopplereffect)from the transmitted frequency.
From the Doppler frequency-shift, whichcan be measured, the speed v of the vessel can be found.A second transmitting transducer directs a beam in a backward direction and a second receiving transducer receives its echoes.The speed of sound waves in the water c depends, however, on the temperature and (to a smaller degree) on the salinity and the water pressure.For that reason athermistoris mounted near the transducers. (Athermistoris a resistance, the magnitude of which depends on the, temperature.)Deviations of the sound speed c from the normal value are passed to the system computer for correction of its calculations.Note that the reading of a Doppler log depends solely on the speed of the sound waves;
The propagation time of the pulse and its echo plays no role.Automatic correction for changes in speed of soundIn some types of Doppler log, c/cos. is automatically kept constant.This is done by building up each transducer from a large number (144) ofelectrostrictiveelements.For simplicity only four elements are shown:If the four elements were supplied with alternating voltages in phase, the, resulting sound waves would also be in phase, and the beam would be directed perpendicular to the radiating face of the transducer, i.e. vertically.However, the elements are fed with voltages that differ in phase by 120, so the sound waves have the same phase difference.At all points of the line AB, however, the sound vibrations are in phase.Such a line or plane is called a wave front; propagation is always perpendicular to a wave frontReflectionsBoth the echo sounder and the Doppler log react to reflections of sound waves from the seabed; the former measures the propagating time and the latter the difference of the two frequencies.If the beam is propagated from one water layer into a second one of different composition or temperature, there will be reflection; there will also be a Doppler effect if the second layer moves relative to the first layer and if the beam hits this layer obliquely.In that case the frequency of the sound vibrations penetrating the second layer will also change, if the speed of the sound waves in the second layer is different from that in the first layer.For the echo, however, the reverse frequency change will occur and will cancel out the first change.A Doppler log measures the algebraic sum of all Doppler frequency shifts experienced by the sound on its way to the bottom (or to a reflecting layer) and back again.To this frequency shift must be added the shift that arises at the transition of the transducer vibrations between the ship and the water, and vice versa. If the beam hits the bottom (bottom lock) the total frequency shift is, proportional to the speed of the ship with regard to the bottom.If there is no bottom contact, but only reflection against a water layer, the measured Doppler shift is proportional to the speed of the ship relative to that water layer (water lock).JanusconfigurationThe placing of the two transmitting transducers, to produce forward and backward beams is called aJanusconfiguration.Due to theJanusconfiguration a linear relationship exists between the speed of the vessel and the measured frequency shift.A further advantage is that vertical movements of the ship cause equal changes to the Doppler shifts in the forward and backward beams, so the difference remains the same.Vertical movements of the ship donot therefore influence the Doppler shift.
For measuring the athwart ship speed, a similarJanusconfiguration is mounted at an angle of 90 deg. with the along ships transducers;The distance from the bridge of a large tanker to the bows may be 250 metres, so special information aboutthe athwartships speed both fore and aft is required when mooring.In that case athwart ships transmitting and receiving transducers are mounted both fore and aft.Janusconfiguration.A term describing orientations of the beams of acoustic or electromagnetic energy employed with Doppler navigation systems.TheJanusconfiguration normally used with Doppler sonar speed logs, and docking aids employs four beams of ultrasonic energy, displaced laterally 90 from each other and each directed obliquely (30 from the vertical) from the ships bottom. This is to obtain true ground speed in the fore and aft and athwart ship directions.These speeds are measured as Doppler frequency shifts in the reflected beams. Certain errors in data extracted from one beam tend to cancel the errors associated with the opposite directed beam.Pitching and rollingFrom the figure we see that the speed for the dotted position of the ship, and for the forward-directed beam increases toV1; for the backward-directed beamV1decreases toV1.
Results are obtained by taking the difference of the Doppler shifts for the forward beam and for the backward beam.In the horizontal position of the ship when this vector becomes smallerthis vectorbecomes greater, or vice versa, sothe sum of the two vectorsis approximately 2v,.Hencethe Doppler measurement of the speed is not, in practice,influenced by pitching.The same applies to the two athwartships beams during rolling.Continuous-wave and pulse,systemsHithertoit has been taken for granted that the transmitting transducers generate vibrations continuously, thus making it necessary for each beam to have a separate transmitting and receiving transducer.This is called acontinuous-wave (c.w.) system.Transmitting and receiving transducers are of identicalconstruction.Othertypes arepulse systems.In such a system a transducer generates pulses and the same transducer receives the echo between the transmissions.Therefore a pulse system needs only half as many transducers as acontinuous-wave system.In thecontinuous-wavesystem the reception of the echo can be disturbed by the continuously emitted vibrations of the transmitting transducer going directly from transmitting to receiving transducer (cross-noise or feedback).With pulse systems this cannot occur, since a pulse is transmitted only after the echo of the preceding pulse has been received, and the receiver is blocked during the transmission.The majority of Doppler logs in use are pulse systemsTransducersThe angle of the along ships beams is about 3 deg., that ofthe athwartships beam is about 8 degrees.The frequency used is 100 to 600 kHz newer models have a transmission frequency of maybe 2 MHz.The surface area of each transducer need then be only about 10 cm2.The high frequencyand the concave shape of the surface also lead to a small beam angle.The higher frequency influences the reflection and the absorption but not the speed of propagation.The transducers are of theelectrostnctivetype.Two possibilities for aJanusconfiguration.Usually the transducers are inserted in a 'sea chest' or 'sea well,permitting their removal for repairs or replacement without the ship requiring dry-docking.The diameter of the hole required in the hull plates is about 350 mm.Replacement of a transducer (1) in a sea chest without the ship being dry-docked can be done in the following way.
After the transducer (which is connected to the other apparatus by means of a cable with a plug and socket) has been disconnected, some nuts (2) are loosened and the bolts turned in the direction of the arrows.Now the transducer (1) can be drawn upwards until it is above the flange (4) in the upper part (3) of the sea chest.This upper part is then shut off from the lower part (6) by means of a sliding valve operated by the hand wheel (5).In order to check that the valve is properly shut a tap (not shown in the figure), connected to the upper part (3), can be opened.If the water in the upper part is not under pressure the bolts (7) of the flange (4) may be removed.By using grease, the transducer can be slid easily from the top flange (8).The sequence is reversed when a new transducer is mounted.Measurement of ship's speed relative to bottom or to waterOwing to absorption by particles in the water at a depth of 200 to 400 metres, the so-calleddeep scattering layer(DSL), a Doppler log may only function, down to about 200 metres, unless the set is equipped to work in the layer of 10-30 metres below the surface.Whenreflections are received from this layer the speed of the ship relative to that layer, and not relative to the bottom, isobtained.Thus uncertainty and confusion may occur.Apart from the effect of the Deep Scattering Layer, the water at 10 to 30 metres below the keel also causes an echo and Dopplereffectby volume-reverberation.This is called 'water track' (as opposed to 'bottom track').In deep water there is a considerable difference between the time of propagation for bottom reflection and that for reflection from the mass of water at a depth of 10 to 30 metres.Receivers can be made operative for only a short period (a certain 'window' of time) either immediately after or a short time after each pulse transmission.Suppose that the receiver has bottom contact, with the windowoccurringa short time after, transmission.If the Doppler log then loses bottom contact, the window is automatically shifted to occur immediately after pulse transmission.As a result, the receiver reacts only to reflections from the 10-30-metre water layer.When this happens, 'bottom track' indicator is replaced by 'water track'.When sufficiently low frequencies are used, echoes may still arrive from a rocky bottom at a depth of 600 metres and more.In some Doppler log, for depths less than 600 metres it is possible to switch manually to the water track mode.Uses of the Doppler logFor, example, for a tanker of 200 000 tonnes with a residual speed when tying up of 0.2 knots (0.1 m/s), the energy to he absorbed by a pier or dolphin together with the ship's side is:1/2mv2=1000 000 joules.The Doppler log can measure the speed to the nearest 0.01 knot or 5 mm/s; unfortunately, however, it sometimes does not function correctly during docking if the screws of tugs cause air bubbles (which reflect sound waves) to pass through the beams (aeration).Since the sound waves are reflected off by the water air barrier the Doppler may give wrong readings.
RADARCRTTHE CATHODE-RAY TUBE (CRT)The cathode-ray tube (CRT) and the picture tube of a television set are one and the same.
All CRTs havethreemain elements:an electron gun,a deflection system, anda screen.The electron gun provides an electron beam, which is a highly concentrated stream of electrons. The deflection system positions the electron beam on the screen, and the screen displays a small spot of light at the point where the electron beam strikes it.THE ELECTRON GUNThe cathode of the electron gun in the CRT is required not only to emit electrons, but also to concentrate emitted electrons into a tight beam.
The cathode of the CRT consists of a small diameter nickel cap. The closed end of the cap is coated with emitting material.CRT cathode.
Because of this type