Dynamics Lecture2 General Curvilinear Motion - Rectangular Components and Projectile Motion
41
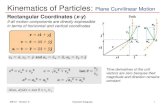
General Curvilinear Motion Curvilinear motion occurs when the particle moves along a curved path Position. The position of the particle, measured from a fixed point O, is designated by the position vector r = r(t).
description
MEC31-1
Transcript of Dynamics Lecture2 General Curvilinear Motion - Rectangular Components and Projectile Motion

General Curvilinear Motion
Curvilinear motion occurs when the particle moves along a curved path
Position. The position of the particle, measured from a fixed point O, is designated by the position vector r = r(t).

Displacement. Suppose during a small time interval Δt the particle moves a distance Δs along the curve to a new position P`, defined by r` = r + Δr. The displacement Δr represents the change in the particle’s position.
General Curvilinear Motion

Velocity. During the time Δt, the average velocity of the particle is defined as
t
rvavg
The instantaneous velocity is determined from this equation by letting Δt 0, and consequently the direction of Δr approaches the tangent to the curve at point P. Hence,
dt
drvins
General Curvilinear Motion

• Direction of vins is tangent to the curve
• Magnitude of vins is the speed, which may be obtained by noting the magnitude of the displacement Δr is the length of the straight line segment from P to P`.
dt
dsv
General Curvilinear Motion

Acceleration. If the particle has a velocity v at time t and a velocity v` = v + Δv at time t` = t + Δt. The average acceleration during the time interval Δt is
t
vaavg
2
2
dt
rd
dt
dva
General Curvilinear Motion

a acts tangent to the hodograph, therefore it is not tangent to the path
General Curvilinear Motion

Curvilinear Motion: Rectangular Components
Position. Position vector is defined by
r = xi + yj + zk
The magnitude of r is always positive and defined as
222 zyxr
The direction of r is specified by the components of the unit vector ur = r/r

Velocity.
zvyvxv
kvjvivdt
drv
zyx
zyx
where
The velocity has a magnitude defined as the positive value of
222zyx vvvv
and a direction that is specified by the components of the unit vector uv=v/v and is ALWAYS tangent to the path.
Curvilinear Motion: Rectangular Components

Acceleration.
zva
yva
xva
kajaiadt
dva
zz
yy
xx
zyx
The acceleration has a magnitude defined as the positive value of
222zyx aaaa
where
Curvilinear Motion: Rectangular Components

• The acceleration has a direction specified by the components of the unit vector ua = a/a.
• Since a represents the time rate of change in velocity, a will NOT be tangent to the path.
Curvilinear Motion: Rectangular Components

PROCEDURE FOR ANALYSIS
Coordinate System
• A rectangular coordinate system can be used to solve problems for which the motion can conveniently be expressed in terms of its x, y and z components.
Curvilinear Motion: Rectangular Components

Kinematic Quantities
• Since the rectilinear motion occurs along each coordinate axis, the motion of each component is found using v = ds/dt and a = dv/dt, or a ds = v ds
• Once the x, y, z components of v and a have been determined. The magnitudes of these vectors are found from the Pythagorean theorem and their directions from the components of their unit vectors.
Curvilinear Motion: Rectangular Components

EXAMPLE 12.9
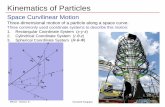
At any instant the horizontal position of the weather balloon is defined by x = (9t) m, where t is in seconds. If the equation of the path is y = x2/30, determine the distance of the balloon from the station at A, the magnitude and direction of both the velocity and acceleration when t = 2 s.

Solution:Position. When t = 2 s, x = 9(2) m = 18 m and y = (18)2/30 = 10.8 m
The straight-line distance from A to B is
218.1018 22 r m
Velocity.
smxdt
dyv
smtdt
dxv
y
x
/8.1030/
/99
2
EXAMPLE 12.9

When t = 2 s, the magnitude of velocity is
smv /1.148.109 22
The direction is tangent to the path, where
2.50tan 1
x
yv v
v
Acceleration.
2/4.5
0
smva
va
yy
xx
EXAMPLE 12.9

222 /4.54.50 sma
The direction of a is 90
0
4.5tan 1
a
EXAMPLE 12.9

The motion of box B is defined by the position vector r = {0.5sin(2t)i + 0.5cos(2t)j
– 0.2tk} m, where t is in seconds and the arguments for sine and cosine are in radians (π rad = 180°). Determine the location of the box when t = 0.75 s and the magnitude of its velocity and acceleration at this instant.
EXAMPLE 12.10

Solution:Position. Evaluating r when t = 0.75 s yields
mkjradiradr st })75.0(2.0)5.1cos(5.0)5.1sin(5.0{75.0
mkji }150.00354.0499.0{
The distance of the box from the origin is
mr 522.0)150.0()0354.0()499.0( 222
EXAMPLE 12.10

The direction of r is obtained from the components of the unit vector,
107
1.86
2.17)955.0(cos
287.00678.0955.0
522.0
150.0
522.0
0352.0
522.0
499.0
1
kji
kjir
rur
EXAMPLE 12.10

Velocity.
smkjtitdt
rdv /}2.0)2sin(1)2cos(1{
Hence at t = 0.75 s, the magnitude of velocity is
smvvvv zyx /02.1222
Acceleration. The acceleration is not tangent to the path. 2/})2cos(2)2sin(2{ smjtit
dt
vda
At t = 0.75 s, a = 2 m/s2
EXAMPLE 12.10


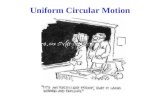
• Free-flight motion studied in terms of rectangular components since projectile’s acceleration always acts vertically• Consider projectile launched at (x0, y0)• Path defined in the x-y plane• Air resistance is neglected• The only force acting on the projectile would be its weight, resulting in constant downwards acceleration• ac = g = 9.81 m/s2
Motion of a Projectile

Motion of a Projectile

Horizontal Motion Since ax = 0,
);(2
;2
1
;
020
2
200
0
ssavv
tatvxx
tavv
c
c
c
xx
x
xx
vv
tvxx
vv
)(
)(
)(
0
00
0
Horizontal component of velocity remain constant during the motion
Motion of a Projectile

Vertical. Positive y axis is directed upward, then ay = - g
);(2
;2
1
;
020
2
200
0
yyavv
tatvyy
tavv
c
c
c
)(2)(
2
1)(
)(
02
0
200
0
yygvv
gttvyy
gtvv
yx
y
yy
Motion of a Projectile

• Problems involving the motion of a projectile have at most three unknowns since only three independent equations can be written: - one in the horizontal direction - two in the vertical direction• Velocity in the horizontal and vertical direction are used to obtain the resultant velocity (via Pythagorean theorem)• Resultant velocity is always tangent to the path
Motion of a Projectile

PROCEDURE FOR ANALYSISCoordinate System• Establish the fixed x, y, z axes and sketch the trajectory of the particle• Specify the three unknowns and data between any two points on the path• Acceleration of gravity always acts downwards• Express the particle initial and final velocities in the x, y components
Motion of a Projectile

• Positive and negative position, velocity and acceleration components always act in accordance with their associated coordinate directions
Kinematics Equations• Decide on the equations to be applied between the two points on the path for the most direct solution
Motion of a Projectile

Horizontal Motion• Velocity in the horizontal or x directions is constant (vx) = (vo)x
x = xo + (vo)x t
Vertical Motion• Only two of the following three equations should be used
Motion of a Projectile

)(2)(
2
1)(
)(
02
0
200
0
yygvv
gttvyy
gtvv
yx
y
yy
• Eg: if final velocity is not needed, first and third of the equations would not be needed
Motion of a Projectile

EXAMPLE 12.11
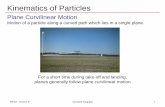
A sack slides off the ramp with a horizontal velocity of 12 m/s. If the height of the ramp is 6 m from the floor, determine the time needed for the sack to strike the floor and the range R where the sacks begin to pile up.

Coordinate System. Origin of the coordinates is established at the beginning of the path, point A.Initial velocity of a sack has components (vA)x = 12 m/s and (vA)y = 0Acceleration between point A and B ay = -9.81 m/s2Since (vB)x = (vA)x = 12 m/s, the three unknown are (vB)y, R and the time of flight tAB
EXAMPLE 12.11

Vertical Motion. Vertical distance from A to B is known
st
tatvyy
AB
ABcABy
11.1
;2
1)( 200
The above calculations also indicate that if a sack is released from rest at A, it would take the same amount of time to strike the floor at C
EXAMPLE 12.11

Horizontal Motion.
mR
tvxx ABx
3.13
)( 00
EXAMPLE 12.11

The chipping machine is designed to eject wood at chips vO = 7.5 m/s. If the tube is oriented at 30° from the horizontal, determine how high, h, the chips strike the pile if they land on the pile 6 m from the tube.
EXAMPLE 12.12

Coordinate System. Three unknown h, time of flight, tOA and the vertical component of velocity (vB)y. Taking origin at O, for initial velocity of a chip,
(vA)x = (vO)x = 6.5 m/s and ay = -9.81 m/s2
smv
smv
yO
xO
/75.3)30sin5.7()(
/5.6)30cos5.7()(
EXAMPLE 12.12

Horizontal Motion.
st
tvxx
OA
OAxA
9231.0
)( 00
Vertical Motion.Relating tOA to initial and final elevation of the chips,
mh
tatvyhy OAcOAyOA
38.12
1)(1.2 20
EXAMPLE 12.12

The track for this racing event was designed so that the riders jump off the slope at 30°, from a height of 1m. During the race, it was observed that the rider remained in mid air for 1.5 s. Determine the speed at which he was traveling off the slope, the horizontal distance he travels before striking the ground, and the maximum height he attains. Neglect the size of the bike and rider.
EXAMPLE 12.13

Coordinate System. Origin is established at point A. Three unknown are initial speed vA, range R and the vertical component of velocity vB.
Vertical Motion. Since time of flight and the vertical distance between the ends of the paths are known,
smv
tatvss
A
ABCAByAyAyB
/4.132
1)()()( 2
EXAMPLE 12.13

Horizontal Motion
•For maximum height h, we consider path AC•Three unknown are time of flight, tAC, horizontal distance from A to C and the height h•At maximum height (vC)y = 0
m
R
tvss ABAxAxB
4.17
)5.1(30cos38.130
)()()(
EXAMPLE 12.13

•Since vA known, determine h using the following equations
•Show that the bike will strike the ground at B with velocity having components of
smvsmv
mh
h
ssavv
yBxB
yAyCcAc yy
/02.8)(,/6.11)(
28.3
]0)1)[(81.9(2)30sin38.13()0(
])()[(2)()(
22
22
EXAMPLE 12.13