Search for dark matter and transient variations in using ...

tegral, equation 36, as ro approaches zero then becomes:
§\p(z)dz = f ^{jiv)d(jw) + Ã
J -jR J Cj
J -jE
t(jw)d(jw) + Ι ø(æ)Üæ -jR J CR
(37)
Thus
CjR ðF(a)ea t à yl/{jw)d{jw) —j I \p(z)dz
-jR a JCR
(38) everywhere that R>a. On the contour CR, \Z\=R, ïô Ζ = Rett with -ττ/2^θ^π/2,
É á 2 - æ 2 | ^ á 2 - | * 2 | = a*-R2
Consequently,
Ô JTT/2
-*/* \F(re*>)\\jRej°\\de\
a*-R2
r~^2 I F(Reje) j Rd$
Ë / 2 * 2 - * 2
For a physical system with a transfer func-tion of F(jw), the limit of F(Re^e) approaches zero as R approaches infinity. Also, since R has a higher power in the denominator than the numerator,
Lim j xp(z)dz\=0 (39)
Lim! f í From equation 38, taking the limit as Κ-+<*>, the following is obtained :
Y(jw)d(jw) =Lim I \l/(jw)d{jw) - i c o R^œJ -jR
,irF{a)ea
=J
Lim R-*- 00 J \j/{z)dz
CR
. TrF(a)eat
—J
Integral 32 then becomes
(40)
2ð L J _ i œ á ' - ( » J
á ^F{a)ear\
= -F( a)e<* (41)
Now as a approaches zero the integral 40 becomes
Um- F{a)ea'J-F{Q) o-*0 * *
(42)
References
1. COMPARISON OF SEVERAL M B T H O P S FOR O B -
TAINING THE T I M E RESPONSE OF LINEAR SYSTEMS
TO EITHER A U N I T IMPULSE OR ARBITRARY INPUT
FROM FREQUENCY RESPONSE D A T A , J . J. Donegan,
C . R . Huss. Technical Note 3701, National Advisory Committee for Aeronautics, Langley Aeronautical Laboratory, Langley Field, Va., Mar. 16, 1956.
2. D E L A Y L I N E COMPENSATOR IN OPEN AND
CLOSED L O O P SYSTEMS, T. W . Sze. Ph.D. Dis-
sertation, Northwestern University, Evanston, 111., Aug. 1954.
3. DETERMINATION OF TRANSIENT RESPONSE
FROM FREQUENCY RESPONSE, A. Leonhard. Trans-
actions, American Society of Mechanical Engi-neers, New York, N . Y. , Nov . 1954.
4. A GENERAL C A R D PROGRAM FOR THE EVALUA-
TION OF THE INVERSE LAPLACE TRANSFORM,
C . K. Titus. Journal, Association for Computing Machinery, New York, N. Y. , vol. 2, no. 1, Jan. 1955, pp. 18-27.
5. T H E INFLUENCE OF THE PRESTRIKE ON T R A N S -
MISSION-LINE LIGHTNING PERFORMANCE, S. B.
Griscom, J . W. Skooglund, A. R . Hileman. AIEE Transactions, vol. 77, pt. I l l , Dec. 1958, pp. 933-41.
Digital Calculation of Transient
Performance of the Primary Coolant
System in a W a t e r Reactor
D. G . L E W I S ASSOCIATE MEMBER AIEE
IN THE DESIGN of control systems for nuclear reactors, detailed knowledge
of the rate of change of temperature in the reactor core is a very important factor. To evaluate this temperature as a function of time, it is necessary to deter-mine both the heat added from the nuclear reaction itself, and the heat rejected through the cooling medium and through losses. The ability of the cooling medium
Paper 58-1314, recommended by the AIEE Com-puting Devices and Nucleonics Committees and approved by the A I E E Technical Operations Department for presentation at the AIEE Fall General Meeting, Pittsburgh, Pa., October 26-31, 1958. Manuscript submitted June 30, 1958; made available for printing September 11, 1958.
D . G. L E W I S is with the General Electric Company, Schenectady, Í . Y .
A portion of the material for this paper was ob-tained in the course of engineering development work under Contract No. W-31-109 Eng-52, spon-sored by the General Electric Company which operates the Knolls Atomic Power Laboratory for the United States Atomic Energy Commission.
to remove heat from the reactor is de-pendent upon the rate of coolant flow. This paper describes an application of a digital computer for computing coolant flow under various transient conditions which may arise during normal operation or during emergencies. The method used takes into account the following factors :
1. Inertia of the coolant fluid.
2. Inertia of rotating equipment (pumps and motors).
3. Frictional pressure drops in the flow paths.
4. Pump head flow characteristics.
5. Friction and windage losses in pumps and motors.
6. Transient effects in the rotor circuits of the pump motors.
Note that free convection of the fluid is not considered. Because of the heat transfer to and from the coolant, and
because of the configuration of the flow paths, pressure heads are developed which result in a free convection component of flow. This component of flow becomes significant only when the total flow is less than 5% of normal flow. For flows greater than this, free convection may be safely ignored.
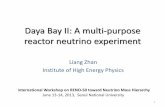
The flow paths in the coolant system are shown in Fig. 1. It is a 2-loop sys-tem as shown, so named because of the two parallel fluid paths, each with its own pump and driving motor. The flows in these two loops are not independ-ent of each other, since the flow path through the reactor itself is common to both loops. The situation is analogous to that of a mutual impedance in a 2-loop electrical circuit, except that in the fluid case, the drop in potential (pressure) is not a linear function of the flow.
Fig. 1 . Two-loop system arrangement
1 0 3 6 Lewis—Calculation of Transient Performance of Coolant System JANUARY 1 9 5 9

1.0
0 .8
Q6
0 .4
Q 2
VI P E R - U N I T
W ^ l o w
T E S T DATA
COMPUTED D A T A . s a s
ID
I 2 3 4 5 6
SECONDS
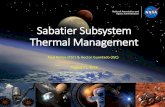
F13. 2 . Comparison of test data and computed results. Open-circuit on both pump motors at t = 0 . Note: Tests performed by Westing-house Atomic Power Division for the Atomic Energy Commission
^ F L < DW 2
/ S P E E D 2
/ S P E E D 1
/ F L DW 1
K> II 12
SECONOS
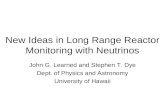
Fig. 3 . Sequential failure. Motor 1 open-circuited at t = 0 , motor 2 open-circuited at t = 2.0 seconds
In the system studied, the basic con-figurations of the two loops are identical. Thus the physical parameters of the two loops are the same, although the instan-taneous flows and motor speeds may differ.
Energy to drive the coolant fluid is supplied by the pumps, which in turn are driven by induction motors supplied from individual generators. Each fluid loop has a check valve to prevent reverse flow, and it is also equipped with stop valves as required for control and main-tenance.
In studying the flow in this system from the standpoint of protection against overheating of the reactor during emer-gencies, the important quantities to be determined are the total and loop flows and the motor speeds as functions of time. Quantities of secondary importance, but often needed in the design of protective arrangements, are the motor torques, currents, and rotor flux-linkages. To obtain these quantities, the differential equations for the system have been derived, and a digital computer has been used to develop particular solutions of these equations for cases of interest. The analytical approach and the numerical method for solving the differential equa-tions are described in the section "Out-line of Analysis and Computer Pro-gramming."
Transient Performance of Coolant System
Since the physical parameters of the two loops are the same, any operating con-dition or disturbance which affects both of the loops in exactly the same way can be analyzed much more easily than a dis-turbance which causes different condi-tions to exist in the two loops. The
former case is referred to as a "symmet-rical" case, the latter as a "nonsym-metrical" case. The equations and com-puter program for this study were de-veloped to apply to nonsymmetrical cases, but can be used for symmetrical cases also.
The first set of results shown, Fig. 2, compares computed results with test data for a symmetrical case.1 For this case, both loops are assumed to be operating in the steady state under rated conditions prior to the disturbance. At time zero, the pumps in both loops fail, due to sudden opening of the motor breakers. The curve shows the resulting decay of flow. The close agreement between the computed and test data indicates that both the differential equations and the numerical method used to solve them are a satisfactory approximation, despite the limitations inherent in the transient analysis of the electrical and fluid systems.
Fig. 3 shows both flows and speeds for both loops for a nonsymmetrical case. For this run, the initial conditions and the type of disturbance are the same as for the run of Fig. 2, except that the failure
occurs in loop 1 at time zero and in loop 2 at / = 2.04 seconds.
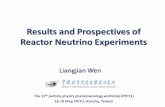
Fig. 4 shows flow, speed, and rotor flux linkage for another symmetrical case, namely, sudden loss of field on the gen-erators supplying the pump motors. For this case, the motor currents and torques were also computed.
The computer program used to obtain these results has been used to study other cases as well, including loss of steam pressure on the turbine generators, 3-phase short circuits on the pump motors, motor shaft failure, and seizure of the pump impeller. Each of the cases re-quires some modification of the computer program, but the same basic program can be used for many different conditions as long as care is observed in making pro-gram changes correspond to changes in the physical system.
Outline of Analysis and Computer Programming
The general analysis of the system of Fig. 1 proceeds as follows: The equations of a multiloop fluid system are derived from the equations of Lagrange.2 The force terms in these equations are then
Fig. 4 . Loss of excitation on generators
F L O W ^ S P E E D - ^
/ F L U X - L I N K A G E S
P E R - U Nil Γ \
1.5 SECONDS
JANUARY 1 9 5 9 Lewis—Calculation of Transient Performance of Coolant System 1 0 3 7

S T A R T
C O M M U T E M O T O R C U R R E N T S , T O R Q U E S a S P E E O D E R I V A T I V E S
C O M P U T E M O T O R F L U X - L I N K A G E D E R I V A T I V E S
E N T E R S T E P - B Y - S T E P S U B R O U T I N E
Ô
Fig. 5. Flow diagram of calculation of derivatives
related to the pump shaft torque by-means of the steady-state pump head-flow characteristics. This shaft torque is obtained from the motor electrical torque less friction and windage terms. The motor torque can be calculated from motor current and flux linkages which are obtained in turn, by the 2-axis in-duction motor equations used previously to study the transient performance of induction motors. 3 ' 4 These develop-ments provide a set of four first-order differential equations for dependent vari-ables in each loop of the system. Thus, in the 2-loop system, eight simultane-ous first-order differential equations must be solved. The initial (steady-state) values of the dependent variables in these equations can be obtained quite easily. The equations are nonlinear, however, and a solution by numerical methods is required unless extensive simplifications are made. The number of equations and the variety of cases to be studied makes the use of automatic computing equip-ment mandatory. When this problem was first proposed, it was evident that it would arise repeatedly with different sets of physical constants to be considered. This, together with the necessity of repre-senting accurately several important non-linearities and the use of tabulated pump
characteristics, led to the conclusion that a flexible digital computer program would be superior to an analog computer setup. Such a program was written for the In-ternational Business Machines Corpora-tion 650 computer, and the results shown in Figs. 2 through 4 were obtained with this program. Complete results for sym-metrical cases similar to those illustrated by Figs. 2 and 4 are obtained in about 20 minutes. For nonsymmetrical cases, such as the one illustrated by Fig. 3, com-plete results are obtained in about 40 minutes. A corresponding program has been written for the IBM 704 computer.
The computer program is divided into three main sections :
1. Calculation of derivatives.
2. Step-by-step numerical integration.
3. Output program.
The separation of the first two sections follows from the usual approach to nu-merical solutions of initial-value problems. Such a problem is expressible as a set of differential equations of the form
dyi -^^fifayuy*.. .y»)
-Tt-h(t>yuyz- • -Jn) (i)
^ =fn(t,yuy2,.. .yn)
In the problem at hand, w = 8, and the y's correspond to the flows, speeds, and motor flux linkages which appear as dependent variables in the system equa-tions. The solution of such a problem can be obtained with several different numerical procedures of varying com-plexity and accuracy.5'6 All of these methods, however, use the derivatives ob-tained from equation 1 together with
values of the dependent variables known at a point h (or several points tt, etc.) to obtain values of the variables at the point tk+i. Repeated applications of this process, for which the term "step-by-step" is commonly used, give values of the dependent variables for any desired ex-cursion of the independent variable, which in this problem is the time /.
To allow relative ease in making pro-gram modifications, the section of the computer program used for the calculation of derivatives was further subdivided. By keeping these subdivisions carefully identified, the chances for error in making program changes were substantially re-duced. Fig. 5 illustrates the rather ob-vious nature of the these subdivisions and shows the sequence in which they occur as the derivative calculation is executed.
The step-by-step method used in the 650 program for this problem is known as the modified Euler's method and is often referred to as "slope extrapolation with trapezoidal improvement." It con-sists of the application of the two follow-ing equations.
Predictor (slope extrapolation):
yj\k+i==yj\Ck+M[fj(t>yuy2.. .^n ) |3 (2)
Corrector (trapezoidal improvement):
éc ic , Δ / r ic yj\k+i=yj\k+— Uj{t,yi- • • yn)\k +
fj(t,yi...yn)\Ui] (2A)
It can be seen that this corrector equa-tion can be applied repeatedly at the point tk until no further significant improve-ment can be obtained. However, since the evaluation of derivatives indicated by equations 1 must be made for each im-provement, it is usually found most eco-nomical to make a single improvement as
1 0 3 8 Lewis—Calculation of Transient Performance of Coolant System JANUARY 1 9 5 9

DERIVATIVE CALCULATION
(A) (Â)
THE SUBROUTINE CONTROLS
OUTPUT PROGRAM AUTOMATIC ALTERNATION BETWEEN PATHS (Á) â (Â)
1 (PREDICTOR) SUBROUTINE (CORRECTOR)
Fi g. 7. Over-all flow diagram
in equation 2(A), reducing the integrating interval At if greater accuracy is needed. Fig. 6 illustrates the application of this method.
By separating the numerical integra-tion section of the program from the other sections it is possible to write it in the form of a subroutine, with general features which allow it to be used for the solution of other sets of differential equa-tions. Such a subroutine was developed in the work on this particular problem, and has been used successfully for other problems, such as the calculation of missile trajectories and the analysis of transient performance of groups of induction motors.7
The output program is made separate from the other sections for the following reasons:
1. It is not necessary to produce output data at each step in the numerical integra-tion procedure.
2. Some of the desired output data is not normally computed during the evaluation of derivatives. These include magnitudes and angles of current and flux linkage which are normally computed in the form of rec-tangular components (α-β quantities).
Fig. 7 shows how the three sections of the program are used together to obtain the desired over-all operation.
Conclusions
A medium-sized digital computer, with a flexible program, provides a fast and economical way to study the transient performance of electromechanical-fluid systems if that performance can be defined by a set of ordinary first-order differential equations. Nonlinearities usually inher-ent in these systems can be handled readily by numerical methods. The necessity of considering a wide variety of transient disturbances means that the computer program must be modified frequently, but this can be done easily if care is taken to subdivide the pro-gram in correspondence with the actually separate parts of the physical system itself.
A P P E N D I X I . NOMENCLATURE
AND ASSUMPTIONS
Nomenclature
t = time Ô—kinetic energy U=potential energy Q = generalized force m = mass í = velocity /=length of flow path A = area of flow path g = acceleration of gravity p = density FF"=flow rate ù = pump impeller and motor speed AP p =pump pressure rise APL — frictional pressure drop in loop por-
tion of flow path (not common to both loops)
APR = friction pressure drop in common por-tion of flow path (reactor)
ΣΙ/Α = geometry-dependent inertia factor for element of flow path
ηρ = impeller efficiency HL — loop inertia factor Hn = common path inertia factor Η M = inertia factor for motor and impeller Ô M = mechanical torque TE = electrical torque Kw = friction and windage loss coefficient D= rotor diameter L = rotor length K} A V = constants defined when used BJ E = motor terminal voltage /== motor armature current ø = motor rotor flux linkages X = motor transient reactance: X = LS —
M2/Lr
r — rotor resistance r M = resistance in magnetizing branch of
motor equivalent circuit M=mutual inductance Lr = rotor self-inductance Ls — stator self-inductance Subscripts :
L = loop R= reactor
û 0 = initial or rated value iV=normalized value B = base quantity
^ j —α—β axes used in motor analysis
Assumptions
F l u i d S y s t e m
1. System pressure drop is assumed to be a function of flow only.
2. Steady-state pump characteristics are assumed to hold even though the flow is transient.
3. It is assumed that the fluid is incom-pressible and that there is no loss of fluid from the system.
4. Thermal effects, both transient and steady-state, are neglected.
5. It is assumed that the constants of the two loops are the same.
= loops 1 and 2
M o t o r s
1. Balanced rotor and stator windings are assumed.
2. It is assumed that the coefficient of mutual inductance between any stator wind-ing and any rotor winding is a cosinusoidal function of the electrical angle between the axes of the two windings.
3. It is assumed that the rotor is smooth and that the self-inductances of all the wind-ings are independent of rotor position.
4. The effects of saturation, hysteresis, and eddy currents are neglected.
5. The effects of transient stator currents are neglected.
A P P E N D I X I I . FLUID SYSTEM EQUATIONS
Development of General Equations
The dynamical equations which describe transient flow in a fluid system are easily derived, in the 1-dimensional case, by equat-ing net power input to the rate of change of fluid kinetic energy. In the multiloop case, however, it is easier to apply the equations of Lagrange :
d àT à j — --(T-U) = Qi at oqt oqt
( 3 )
where T, U, and Qi are respectively the kinetic energy, the potential energy, and the generalized forces acting on the system. The qi are generalized velocities and the qi are generalized displacements. Since the fluid is incompressible and body forces are not considered, the potential energy term may be omitted.
In a series of lengths of pipe, each of constant cross section, the kinetic energy may be expressed as follows :
KE Ó1 - mv2
2
2á 2 f ?Z-^ 2g
Now, since
Wj-Ajljp
and
W
AJP
then
ÊÂ-*ÃÓ1'/ë'
(4)
(5)
(6)
(7)
In a multiloop system, the total kinetic energy is the sum of the fluid energies in the various flow paths.
The partial derivative of the kinetic energy with respect to displacement is zero; the derivative with respect to velocity is obtained as follows:
— - ( A Ü J - — -
ovj ovj 2gp
^ \ l s / A } (8)
J A N U A R Y 1 9 5 9 Lewis—Calculation of Transient Performance of Coohnt System 1 0 3 9

1.4
1 2
1.0
Q 8
Q 6
Q 4
0 . 2
0
P E R - U N A N D Ε
I T P R E S S F F I C I E N C T
U R E i
^ P U M P PF R I S E
Ξ E S S U R E
-
E F F I C I E N C Y ηρ
0 . 2 0 . 4 0 . 6 0 . 8 1.0
P E R U N I T W / ω
Fig. 8 . Typical characteristics of single-suction radial flow centrif-ugal pump
1.0
Q 8
0 . 6
0 . 4
0 . 2
f.fa.) / '
/
/ / /
/ / /
1/ 1/
/ /
If /
f / V 0 . 2 0 . 4 0 . 6 0 . 8 1.0 1.2
Fig. 9 . Variation of design point impeller efficiency with speed
The force acting on the area A j is simply AjAPi, where APi is the net pressure rise around the flow path. The Lagrange equations then give, for a 2-loop system, the following:
A j2p dvj
g dt ^Jij/A ji = A jAPi i = 1,2
or
dt dt
g dt g dt
= ÄÑ×
(9)
= ÄÑ 2
in which the subscripts 1, 2, and R indicate respectively loop 1, loop 2, and the portion of the flow path common to both loops.
Table I. Frictional Loop Pressure Drop Values in PU
Flow Pressure Drop
0 0
C . 0 4 0 . 0 0 2 2
0 . 0 8 0 . 0 0 8 3
0 . 1 2 0 . 0 1 7 4
0 . 1 6 0 . 0 2 8 7
0 . 2 0 0 . 0 4 1 5
0 . 2 4 0 . 0 5 9 4
0 . 2 8 0 . 0 8 0 6
0 . 3 2 0 . 1 0 4 9
0 . 3 6 0 . 1 3 2 4
0 . 4 0 0 . 1 6 3 1
0 . 4 4 0 . 1 9 7 3
0 . 4 8 0 . 2 3 4 4
0 . 5 2 0 . 2 7 4 9
0 . 5 6 0 . 3 1 7 0
0 . 6 0 0 . 3 6 4 2
0 . 6 4 0 . 4 1 3 2
0 . 6 8 0 . 4 6 5 4
0 . 7 2 0 . 5 2 1 1
0 . 7 6 0 . 5 8 0 1
0 . 8 0 0 . 6 4 2 5
0 . 8 4 0 . 7 0 8 3
0 . 8 8 0 . 7 7 5 7
0 . 9 2 0 . 8 4 8 2
0 . 9 6 0 . 9 2 2 4
1 . 0 0 1 . 0 0 0 0
1 . 0 4 1 . 0 8 0 9
1 . 0 8 1 . 1 6 3 6
1 . 1 2 1 . 2 5 1 3
1 . 1 6 1 . 3 4 2 3
1 . 2 0 . . . 1 . 4 3 5 1
Equations 9 now permit the calculation of the flow derivatives in terms of the pump pressure heads and the frictional pressure drops in the two loops.
Steam Pressure Rise
The net pressure rise is the difference between the pressure head produced by the pump and the frictional pressure drop caused by the instantaneous flow. The pressure head developed by the pump is developed from the following general affinity rela-tions :
(10)
The function fi is evaluated from a steady-state head-capacity characteristic at a known speed, and then APp can be formed for any flow and speed. A typical pump characteristic is shown in Fig. 8(A).
The frictional pressure drop is a function of flow only, with the major part generally of the form
AP = K{W)a
( I D
The exponent a is commonly taken as 2, but may vary downward to 1.9 or lower, depending on system configuration. The results shown in this paper were obtained using a tabulated function shown in Table I.
A part of the frictional pressure drop may occur in a valve or other special ele-ment in the flow path, and this drop may be a function of flow more complicated than can be described by equation 11. In this study, the pressure drop in a check valve is included as part of the function in Table I.
It is important to recognize that, in a multiloop problem, components of the frictional pressure drop occur in portions of the flow path common to two or more loops. These drops must be evaluated separately, with the use of total flow in equation 11. A value a = 2 was used to calculate this component of pressure drop.
Impeller Efficiency
The mechanical torque acting on the pump motor may be found from the expression
APpW (12)
which expresses impeller losses in terms of an efficiency ηρ and includes rotor friction and windage as a function of speed. The efficiency is calculated as a product of two functions :
VP
=/20 f3M (13)
The first function f% (W/ω) expresses the relation between efficiency and relative flow rate. At a given speed, the efficiency is zero at zero flow, and reaches a maximum at some known value of flow. At design speed, the flow for maximum efficiency is the design point flow. This function is based on test data, and is shown in Fig. 8(B). Since test curves of this function on pumps of various designs do not vary appreciably, it may be considered reliable.
The second function, /3(ù) expresses the reduction in maximum efficiency from the design point value at speeds other than rated speed. This function is also based on test data, but there is considerable variation in these data from one pump design to the next, so that this function should be selected with care. The function used in this study is shown in Fig. 9, with a typical range of variation shown in dashed lines. The eval-uation of rotor friction and windage is dis-cussed in Appendix III.
A p p e n d i x I I I . Equations
M o t o r
Mechanical Losses
The motor friction and windage torque is assumed to be proportional to the square of speed, the constant of proportionality being derived from dimensional analysis and empirical data.
Fundamentally
Power loss = Kœ3D*L (14)
For a given motor and pump, Κ can be determined by test and D and L are fixed; therefore equation 14 can be simplified:
Power loss = i£ 1o> 3
1 0 4 0 Lewis—Calculation of Transient Performance of Coolant System JANUARY 1959

and finally
Twindaie = Kw<*7 ( 1 5 )
Currents, Torques, Flux Linkages, and Acceleration
The following equations, used for the calculation of motor quantities, are derived in reference 4, under the assumptions listed in Appendix I. The relations are the same for both motors, so the 1 and 2 subscripts are omitted.
1 / M \
1 / M \
' ' - x y - ^ - i r * ' )
TE= ττ(ØáÉâ — ØâÉá ) •L>r
( 1 6 )
( 1 6 A )
( 1 6 B )
ÑØá=-ã- Øá-ÖâÑâ+ã MIa ( 1 6 C ) L r Lr
ÑÖâ=-ã Øâ+Ø*ñè + - MIß ( 1 6 D ) LT L r
pœ = ——(TE-TM) Δη M
( 1 6 E )
Equations 16 through 16(E) are general (though approximate) but must be modified for use in specific cases. For the case in which the motor breakers are assumed to open, zero current is forced by setting 1/X = 0 in equations 16 and 16(A). When this is done, the electrical torque computed from equation 16(B) will be zero also. With standard types of induction motors, during an open-circuit coastdown from rated condi-tions, the electrical torque developed would indeed be negligible, because the open-circuit core loss would be very small. However, with the "canned" motors used in reactor coolant pump applications, the rotor is coupled to a dissipative circuit even though the stator is open, and the power loss in this circuit must be supplied through an elec-trical torque which acts with the mechanical load to decelerate the rotor. The following equation is used to compute this torque for open-circuit cases.
TE(oc) = <*(Øá2+Øâ2)
This equation can be derived easily from the common steady-state equivalent circuit of an induction motor.
In equations 16 through 16(E), Ea and Åâ are the 2-phase components of applied voltage, and in normal operation £ « = 1.0, E/3 = 0. For the loss of excitation case, illustrated by Fig. 4, the constant value for Ea is replaced by a value computed from the following equation.7
Ea = 1.0e-'/Td*' (18)
where
dZ d° (Xd+Xe)(Xq+Xe)+(r+rey
( 1 8 A )
Reference 7 defines the quantities used in this equation.
Appendix IV. Complete System Equations
In this Appendix, the complete set of equations for the system will be listed. The flow diagram of Fig. 5 shows the sequence of calculations. The pump pres-sure rise is calculated with the use of the relationship given in equation 19, solved for ΑΡΌ;
ΑΡρ=ωÍ*/Ë-) (19)
The function fx (W/ω) is stored in the com-puter in tabular form. For use in this cal-culation, the impeller speed is normalized :
ωχ = ù / ù ï ( 2 0 )
where ùï is rated impeller speed. Next, the loop pressure drops are com-
puted :
APL2=KL2gl{W2)
( 2 1 )
( 2 1 A )
where gi(W) is the function given in Table I. Note that this function is normalized: #(1.0) = 1.0. The constants KL\ and KL2
are introduced to give the correct per-unit loop pressure drop at unit flow.
The reactor pressure drop is computed from
APR = KR(W1 + W2)> ( 2 2 )
The next step is the calculation of the flow derivatives. If, in equation 9, the terms of the form (lX/A)/g are replaced by inertia factors 2H, the results are
at at
at dt
and, solving for the derivatives with HL2~ HLi=HL, yields
dWi
dt
( 1 7 ) dW2
dt
• AAP!-BAP2
= A(APPl-APLl-APR)-
B{APP2-APL2-APR) ( 2 3 )
= AAP2-BAPi
= A(APP2-APL2-APR)-
B( APpi - APL1 - APR) ( 2 3 A ) in which
2HL(Hl+2HR)
HR = 2HL(HL+2HR)
( 2 4 )
( 2 4 A )
Equations 23 and 23(A) are the ones used in the computer program to calculate flow derivatives.
The mechanical torque on the impeller shaft is computed next. Equations 12 and 13 are used; for TMI
( A P p Q W ) TMi = -, 7} ~-+Κψ{ωΝι)
2
(ο)Νι){ηρι)
y pi- ( 2 6 )
( 2 5 )
The equations are the same for TMI and V P2.
The calculation of electrical quantities is next. The equations used are 16 through 16(E).
Appendix V . Calculation of System Constants
As is the case with many analytical studies, the determination of system constants for this problem is one of the most difficult phases of the study. There are two reasons for this. First, it is inherently difficult to obtain equipment performance data which will be valid for transient analysis. This is particularly true for the canned motors, which represent a departure from standardized designs. Second, in a com-posite system, the various items making up the system are supplied by different groups, and the analyst himself must often assume the responsibility for collecting data from several sources.
With respect to the difficulty of obtaining valid data, there is need to recognize that transient analyses of composite systems will be requested more and more frequently as control and protection arrangements be-come more complex. There appears to be a great need for standardized definitions of the quantities which become important in the study of transient motor phenomena.
In analyzing system problems, it is useful to express the important variables as decimal fractions of a specified reference value, in other words, in per unit (pu). When this is done, all the dimensional con-stants in the problem must be modified so that the system equations are satisfied when pu values are used throughout. Al-though this modification may require con-siderable calculation, it has advantages which make the preliminary work worth while. First, an evaluation of system per-formance in pu permits easy comparison with other systems of the same general type but of different sizes. An important consequence of this kind of comparison is the likelihood that errors will be detected, whether they occur in system parameters or in the results. A second important advantage is obtained if the calculations are made with automatic computing equipment, either analog or digital, for the expression of quantities in pu accomplishes all or nearly all of the scal-ing which is often required in the applica-tion of this equipment.
The first step in converting system data to pu is the selection of base quantities. It is common to select a power base, a time base, and a base value for one other quantity. These selections are sufficient to determine all other quantities; the selection of addi-tional base quantities will lead to incon-sistency. In this study of 2-loop flow tran-sients, it was decided to use as base power the hydraulic power at rated flow, one second as base time, and rated flow as base flow. Since hydraulic power (HP) =(W)(AP)t
this selection also makes rated pressure drop correspond to base or unit pressure drop.
The evaluation of system constants in pu
JANUARY 1959 Lewis—Calculation of Transient Performance of Coolant System 1041

is shown in the following for a typical set of basic data. The base quantities are :
Base flow = rated loop flow=3 X 10e pounds per hour
Base pressure drop = rated pump head = 130.6 psi (pounds per square inch)
Fluid density = 47.74 pounds/ft (per foot)
Base power = ( ^ b a e e X A P b a s e ) ( 1 4 4 )
( p ) ( 3 , 6 0 0 ) ( 5 5 0 )
( 3 X l O e ) ( 1 3 0 . 6 ) ( 1 4 4 )
HP
(47.74)(3600)(550)
= 437.48 Kw
The system pressure drops at full flow are given as follows:
Loop (not common to both loops), psi. . 5 9 . 3 Reactor (common to both loops), psi. . . 7 1 . 3
Total 1 3 0 . 6
The pressure drop coefficients are there-fore
59 3 KL = zz^t-z = 0 . 4 5 4 0 6
KR-
1 3 0 . 6
= ̂ x i = 0.54594xi = 0.13648
Next must be calculated the inertia factors in the flow derivative equations. To do this, return to equation 9 and observe that the numerical exactness of this equation must be preserved when the flow and pres-sure drop are expressed in pu. To see what this implies, multiply the left-hand side by WB/WB (base flow) and divide each term in the equation by APB:
Ç^l/A^WsdiWJWB)
(g)àPB dt +
Ç^2l/AR)WB d(Wi + W2)/WB ΔΡχ
dt AP»
Flow and speed are now in pu. Now, consider the coefficient of the first flow derivative term. Multiply this coefficient by a unity ratio, as follows :
2 ρ ^ ( Ó ^ 0 ^ 2pWB (g)APB
WB
2GP
WBAPB
This manipulation, together with equa-tion 7 and the expression for base power just given, show that this flow derivative coefficient is equal to twice the ratio of the loop fluid kinetic energy to the hydraulic power at rated flow, i.e.,
HL = ~~——^— (in compatible units) base power
Similarly, it can be shown that
KJßre&ctoT
base power
These two relations make the calculation of the inertia coefficients simple, and pro-vide a useful physical picture. The nu-merical calculation follows:
Fluid inertias (given)
2 / / ^ t o t a l / I o o p = 2 0 0 . 5 ft" 1
SZ/^ reac to r^Ôf t - 1
2/ /^ l ioop== 2 0 0 . 5 - 2 X 5 = 1 9 0 . 5 ft" 1
Stored energy at full flow
( 1 9 0 . 5 ) ( 3 X 1 0 6 ) 2
ÜT-Eloop —
5 8 6 . 6 7 HP ^ r e a c t o r -
( 2 ) ( 3 6 0 0 ) 2 ( 4 8 . 5 7 ) ( 3 2 . 2 ) ( 5 5 0 )
= 7 6 . 8 9 7 5 hp-sec (seconds)
( 5 ) ( 2 X 3 X 1 0 6 ) 2
( 2 ) ( 3 6 0 0 ) 2 ( 4 8 . 5 7 ) ( 3 2 . 2 ) ( 5 5 0 )
= 8 . 0 7 3 2 3 hp-sec
7 6 . 8 9 7 5
8 . 0 7 3 2 3 ^reactor = — — - — = 0 . 0 1 3 7 6 1 S e c
080 . o7
These inertia factors have the dimen-sions of time. A useful physical check exists in the fact that a time equal to 2H is required for the inertia thus described to experience a change in speed (flow) equal to base speed (flow) when base force (pressure) is uniformly applied.
Now, A and  are as follows:
= HL+HB 4837 ± 2HL(HL+2HR) sec
^ 2 ^ ï ^ - ) = ° - 3 3 1 0 1 s i A similar analysis shows that the HM of
equation 1 6 ( E ) can be calculated with the use of the kinetic energy of the impeller and rotor :
J o _ ( 9 5 . 5 X 3 7 7 ) 2
M 2 ù ( 2 ) ( 3 2 . 2 ) ( 5 5 0 )
= 3 8 3 . 2 1 1 hp-sec
In this case, the quantity given is the motor and impeller TΤT 2 = 95 .5 pounds/ft2.
Then
3 8 3 . 2 1 1
5 8 6 . 6 7 = 0 . 6 5 3 2 0 sec
It should be pointed out here that the pu representation of system inertias, using inf-ractors, makes clear the important fact that most of the system inertia resides in the rotors and impellers of the pumps. In such a system including both fluid and rigid-body inertia, the use of common physical units might obscure this point.
Next is calculated the constant Kw associated with rotor friction and windage loss. Preliminary calculations give the power loss due to friction and windage as
Ñ = 6 .12 X 1 0 _ 4 ù 3 ft-pounds/sec
where ù is given in radians/sec. The pu power at rated speed is therefore
P = ( 6 . 1 2 X l Q - 4 ) ( 3 7 7 ) 3
( 5 5 0 X 5 8 6 . 6 7 ) = 0 . 1 0 1 6 3 per unit
Since power equals the product of torque and speed, and rated speed = 1.0 in pu:
2 ^ = 0 . 1 0 1 6 3
The calculation of motor constants is usually made, and these constants are given, using the motor output rating as a pu base. These values must be modified to put them in pu on the hydraulic power base. The ratio of the bases can be found by cal-culating the motor power (or torque at unit speed) required to give unit hydraulic power.
(Τ V ï (WB)(*PB) . . . T Κ L Ì ×ù) =————-—Ù-\-ΚΨÙ*Ù (Ù)(ΗΡ)
_(1·0Χ1·0) (1.0X0.83)'
= 1.306 pu
<1.0) +
(0.10163X1.0)2(1.0)
Therefore, the motor output should be 1.306 pu to give unit hydraulic power.
The motor constants used for this study were obtained partly from design data and partly on the basis of assumed similarity with other similar motors for which complete data were available. The values used are listed in Table II.
The numerical values used in the loss of excitation case are as follows:
Xd = 1.300 = 0.210
X f f = 0.900 r — 0.005 (approximately) Pdo , = s3 sec Ã<*æ' = 1.682 sec X e = 0.456 r e=0.989
Note that Xe and re are calculated on the assumption of an average load of 0.9 pu kilo volt-amperes (on the generator base) at 0.89 power factor.
Appendix V I . Features of Numerical Integration
Subroutine
As pointed out in the "Outline of Analysis and Computer Programming," the numeri-cal manipulations required in the applica-tion of equations 2 and 2(A) can be pro-grammed in the form of a subroutine for general use.
The accuracy obtainable in a solution using equations 2 and 2(A), or other such equations corresponding to other methods of numerical integration, is limited by the error in the calculation made at each step. In general, these components of error are cumulative. The error per step results from two causes: round-off error, which depends on the number of significant figures main-tained in the computation, and truncation error, which results from the fact that the integration is performed over finite rather
Table I I . Pump Motor Constants in PU
On Hydraulic Constant On Motor Base Power Base
χ , 0.1150 0.08804 M 2.775 2.1243 Lr 2.819 2.1584 r 0.00445 0.00341 RM 13 06 10.00
1 0 4 2 Lewis—Calculation of Transient Performance of Coolant System JANUARY 1 9 5 9

than infinitesimal intervals. For a given set of integrating equations, the truncation error per step depends on the length of the integrating interval.
The length of the integrating interval therefore affects over-all accuracy in two ways. A change in this interval changes the truncation error per step, and also changes the number of steps required to complete a given solution, which affects the amount of accumulation of both types of error. Thus the selection of the integrating interval is an important decision with re-gard to the accuracy of the solution, and there is at least an indication that there may be an optimum interval for a given problem, in the sense that either increasing or decreasing the interval from this value will increase the over-all error. The selec-tion of the interval is also an economic de-cision, since the time required to compute a step is the same whether the step is a long or a short one.
From the point of view of both over-all accuracy and economics, it is desirable to maintain uniform error per step throughout a solution, and this can be achieved only by allowing the interval to change during the process. If a numerical solution were to be obtained by hand, this control over the interval would be simple. If a digital com-
puter is to be used, the control must be automatic; i.e., the decision to change the interval must be made by the computer.
The subroutine which was used to obtain the results shown in this paper incorporates an automatic estimate of the truncation error at each step, and it is able to make a change in the interval (doubling or halving) if the estimated error falls outside a specified range.
The operation of the error-estimating portion of the program is as follows. The program first compares the estimated error in a selected variable with the maximum allowable error. If the error is too large, the program goes back to the next previous set of y-values, halves the integrating inter-val, and tries again until the error is below the upper limit.
If the error is below the upper limit, the program next compares it with the minimum economic error. If it is greater than the minimum, the program goes ahead to the next interval. If the error is less than the minimum, the program goes ahead but it starts a counter as it does so. If the error is less than the minimum at each step for five successive steps, the calculation pro-ceeds with a doubled integrating interval. The counter is returned to zero at every step unless the error is less than the minimum, so
the count does not accumulate unless the low-error calculations occur in succession. The demand for five successive low-error calculations is arbitrary, and a lower or higher number can be used if it seems de-sirable.
References
1. R A P I D F L O W TRANSIENTS IN CLOSED LOOPS,
A. J. Arker, D . G. Lewis. TID 7529, pt. I, Book I, Atomic Energy Commission, Washington, D . C , 1 9 5 7 .
2. M E T H O D S OF MATHEMATICAL PHYSICS, V O L . I
(book) , R. Courant, D . Hilbert. Interscience Publishers, Inc., New York, Í . Y . , 1 9 5 3 , p. 2 4 2 ff.
3 . A N ANALYSIS OP THE INDUCTION M O T O R ,
H. C. Stanley. AIEE Transactions, vol. 5 7 , 1 9 3 8 , pp. 7 5 1 - 5 5 .
4 . T R A N S F E R OF STEAM-ELECTRIC GENERATING-
STATION A U X I L I A R Y BUSSES, D . G. Lewis, W . D .
Marsh. Ibid., vol. 7 4 , pt. I l l , June 1 9 5 5 , pp. 3 2 2 -3 4 .
6 . NUMERICAL MATHEMATICAL ANALYSIS (book),
J. B. Scarborough. Oxford University Press, London, England, 1 9 5 0 , p . 2 3 5 ff.
6 . NUMERICAL SOLUTION OF DIFFERENTIAL E Q U A
TIONS (book), W. E. Milne. John Wiley & Sons. Inc., New York, Í . Y . , 1 9 5 3 .
7 . SYNCHRONOUS M A C H I N E S (book), C. Concordia. John Wiley & Sons, Inc., 1 9 5 1 , pp. 6 7 - 7 5 .
Transistor Phase-Locked Oscil lators
K. A . E D W A R D S O . G O L U B J A T N I K O V D . J . B R A D Y NONMEMBER AIEE NONMEMBER AIEE NONMEMBER AIEE
THE USE of phase-locked oscillator control loops for the detection and
tracking of signals in the presence of noise is well known and has been extensively analyzed. 1 - 4 Two completely transis-torized phase-locked oscillator systems have been developed which perform these functions. System I operates at an input center frequency of 10.5 kc, and system II operates at 30 megacycles.
An additional function of frequency multiplication is obtained in the first of the two systems described by the addi-tion of a frequency divider in the feed-back path from the oscillator to the phase detector. This permits small input fre-quency shifts to be readily measured with a frequency counter. This basic system was suggested by Dr. L. J. Neelands.
The systems described have been de-signed for two different applications. In both systems, considerable advantage is obtained by use of transistors and semi-conductor diodes. Some features peculiar to the systems described here, which re-sult from the use of solid-state devices, are outlined as follows and will be described in detail later:
1. In order to obtain a narrow noise bandwidth, a long-time-constant integrat-ing network is necessary. A simple R-C network is not suitable due to the lower impedance levels of transistor circuitry. A feedback integrator is used, and an analysis of the control loop stability includ-ing the effects of the integrator is shown.
2. The narrow bandwidth causes difficulty in locking on a signal during the search mode. This problem is solved with a non-linear network in the integrator.
3. The phase detector permits use of the switching properties of transistors in a simple and reliable circuit. A signal is also provided for a novel phase-lock in-dicator.
4. A unijunction transistor provides a simple means of generating a search signal.
5. The freedom of transistors from micro-phonics and hum permits the elimination of a derivative feedback loop found necessary on comparable vacuum-tube equipment.
Linear Analysis
This analysis is based primarily on the transfer functions of system I; see Fig. 1. It includes the effects of the feedback fre-quency divider and feedback integrator. The equations apply to system II also;
however, for system II, the frequency divider ratio M is unity and the feed-back term K2 (n — r 2) in the time constant r 3 is zero.
The following simplifying assumptions are made in the analysis:
1. The phase detector output is a linear function of the phase difference between the feedback and reference inputs.
2. Leakage of the feedback capacitor and shunting effect of the amplifier input are neglected.
3. The amplifier output impedance is included in the time constant Τ 2 .
4. The oscillator control current and frequency are assumed to be linear functions of the amplifier feedback voltage.
5. Time constants of the oscillator control coil and the phase detector filter are neglected.
Paper 58-1276, recommended by the AIEE Elec-tronics Committee and approved by the AIEE Technical Operations Department for presentation at the AIEE Fall General Meeting, Pittsburgh, Pa., October 2 6 - 3 1 1 9 5 8 . Manuscript submitted April 9 , 1 9 5 8 ; made available for printing Sep-tember 5 , 1 9 5 8 .
K. A. E D W A R D S and O. GOLUBJATNIKOV are with
the General Electric Company, Syracuse, Í . Y . , and D . J. B R A D Y is with United Engineers, Inc., Boston, Mass.
Credit is due D . L . Hägen of the General Electric Advanced Engineering Program for his contribu-tions to the analysis of system I and for the de-velopment of the lock indicator and search circuit. J. T . Holland, Jr., suggested the method of injecting the search signal in system I. Dr. L . J. Neelands gave assistance with determining the system re-quirements and with the analysis. F. J. Ryan and W . R . McKinley contributed much experi-mental work and refinements of the circuits.
JANUARY 1 9 5 9 Edwards, Golubjatnikov, Brady—Transistor Phase-Locked Oscillators 1 0 4 3