Differential Shell Momentum Balance in Cylindrical Coordinates
4
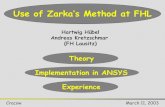
Differential Shell Momentum Balance in Cylindrical Coordinates A shell momentum balance is used below to derive a general differential equation that can be then employed to solve several fluid flow problems in cylindrical coordinates. For this purpose, consider an incompressible fluid in laminar flow under the effects of both pressure and gravity in a system of length L, which is at an angle β to the vertical. End effects are neglected assuming the dimension of the system in the radial direction is relatively very small compared to that in the axial direction (L). Figure. Differential cylindrical shell of fluid of thickness Δr used in z-momentum balance for axial flow in cylindrical coordinates. Since the fluid flow is in the axial direction, v r = 0, v θ = 0, and only v z exists. For small flow rates, the viscous forces prevent continual acceleration of the fluid. So, v z is independent of z and it is meaningful to postulate that velocity v z = v z (r) and pressure p = p(z). The only nonvanishing components of the stress tensor are τ rz = τ zr ,
-
Upload
sahyam-yldz -
Category
Documents
-
view
167 -
download
2
Transcript of Differential Shell Momentum Balance in Cylindrical Coordinates

Differential Shell Momentum Balance in Cylindrical Coordinates
A shell momentum balance is used below to derive a general differential equation that can be then employed to solve several fluid flow problems in cylindrical coordinates. For this purpose, consider an incompressible fluid in laminar flow under the effects of both pressure and gravity in a system of length L, which is at an angle β to the vertical. End effects are neglected assuming the dimension of the system in the radial direction is relatively very small compared to that in the axial direction (L).
Figure. Differential cylindrical shell of fluid of thickness Δr used in z-momentum balance
for axial flow in cylindrical coordinates.
Since the fluid flow is in the axial direction, vr = 0, vθ = 0, and only vz exists. For small flow rates, the viscous forces prevent continual acceleration of the fluid. So, vz is independent of z and it is meaningful to postulate that velocity vz = vz(r) and pressure p = p(z). The only nonvanishing components of the stress tensor are τrz = τzr, which depend only on r.
Consider now a thin cylindrical shell perpendicular to the radial direction extending a distance L in the z-direction. A 'rate of z-momentum' balance over this thin shell of thickness Δr in the fluid is of the form:
Rate of z-momentum In − Out + Generation = Accumulation
At steady-state, the accumulation term is zero. Momentum can go 'in' and 'out' of the shell by both the convective and molecular mechanisms. Since vz(r) is the same at both ends of the system, the convective terms cancel out because (ρ vz vz 2πr Δr)|z = 0 = (ρ vz vz 2πr Δr)|z = L. Only the molecular term (2πr L τrz ) remains to be considered, whose 'in'

and 'out' directions are taken in the positive direction of the r-axis. Generation of z-momentum occurs by the pressure force acting on the surface [p 2πr Δr] and gravity force acting on the volume [(ρ g cos β) 2πr Δr L].
The different contributions may be listed as follows:
rate of z-momentum in by viscous transfer across cylindrical surface at r is (2πr L τrz )|r
rate of z-momentum out by viscous transfer across cylindrical surface at r + Δr is (2πr L τrz )|r + Δr
rate of z-momentum in by overall bulk fluid motion across annular surface at z = 0 is (ρ vz vz 2πr Δr)|z = 0
rate of z-momentum out by overall bulk fluid motion across annular surface at z = L is (ρ vz vz 2πr Δr)|z = L
pressure force acting on annular surface at z = 0 is p0 2πr Δr pressure force acting on annular surface at z = L is − pL 2πr Δr gravity force acting in z-direction on volume of cylindrical shell is (ρ g cos β)
2πr Δr L
On substituting these contributions into the z-momentum balance, we get
(2πr L τrz ) | r − (2πr L τrz ) | r + Δr+ ( p 0 − p L ) 2πr Δr + (ρ g cos β) 2πr Δr L = 0 (1)
Dividing the equation by 2π L Δr yields
(r τrz ) | r + Δr − (r τrz ) | r
Δr =
p 0 − p L + ρ g L cos β
L
r (2)
On taking the limit as Δr → 0, the left-hand side of the above equation is the definition of the first derivative. The right-hand side may be written in a compact and convenient way by introducing the modified pressure P, which is the sum of the pressure and gravitational terms. The general definition of the modified pressure is P = p + ρ g h , where h is the height (in the direction opposed to gravity) above some arbitrary preselected datum plane. The advantages of using the modified pressure P are that (i) the components of the gravity vector g need not be calculated in cylindrical coordinates; (ii) the solution holds for any flow orientation; and (iii) the fluid may flow as a result of a pressure difference, gravity or both. Here, h is negative since the z-axis points downward, giving h = − z cos β and therefore P = p − ρ g z cos β. Thus, P0 = p0 at z = 0 and PL = pL − ρ g L cos β at z = L giving p0 − pL + ρ g L cos β = P0 − PL
≡ ΔP. Thus, equation (2) yields
d (r τrz) = ΔP r (3)

dr L
The above differential equation may be simply integrated to give the general expression for the momentum flux (or shear stress) distribution in cylindrical coordinate systems as
τrz =ΔP
2 Lr +
C1
r(4)
For Newtonian fluids, Newton's law of viscosity may be substituted for τrz in equation (4) to obtain
− μdvz
dr =
ΔP
2 Lr +
C1
r(5)
The above differential equation is simply integrated to obtain the following general expression for the velocity profile for Newtonian fluids:
vz = −ΔP
4 μ Lr2 −
C1
μln r + C2 (6)
Here, C1 and C2 are integration constants, which are determined using appropriate boundary conditions based on the flow problem.
Since equations (3) and (4) have been derived without making any assumption about the type of fluid, they are applicable to both Newtonian and non-Newtonian fluids. On the other hand, equation (6) is applicable to only Newtonian fluids. Some of the axial flow problems in cylindrical coordinates where these equations may be used as starting points are given below.