Diagrama de Bode
15
Introdução A resposta em regime permanente da função de transferência de um sistema pode ser obtida diretamente a partir da função de transferência senoidal. A função de transferência senoidal é caracterizada por seu módulo e ângulo de fase, com a frequência como parâmetro. Função de transferência na qual s é substituído por jω, onde ω é a frequência. Existem três formas de apresentação das características da resposta em frequência na forma gráfica: Diagrama de Bode ou gráfico logarítmico Diagrama de Nyquist ou diagrama polar Diagrama do Logaritmo do módulo versus ângulo de fase (carta de Nichols) Existem vários motivos pelo qual é mais conveniente fazer a representação da resposta numa escala logarítmica de frequência, como a transportabilidade da resposta para qualquer valor de frequência. Do mesmo modo o uso de escala logarítmica no traçado do ganho (módulo) permite contabilizar o efeito de dispositivos em cascata de uma forma aditiva. 4 | Página
-
Upload
alan-eduardo -
Category
Documents
-
view
5 -
download
0
description
Resumo diagrama de Bode
Transcript of Diagrama de Bode

Introdução
A resposta em regime permanente da função de transferência de um sistema
pode ser obtida diretamente a partir da função de transferência senoidal. A função de
transferência senoidal é caracterizada por seu módulo e ângulo de fase, com a
frequência como parâmetro. Função de transferência na qual s é substituído por jω,
onde ω é a frequência. Existem três formas de apresentação das características da
resposta em frequência na forma gráfica:
Diagrama de Bode ou gráfico logarítmico
Diagrama de Nyquist ou diagrama polar
Diagrama do Logaritmo do módulo versus ângulo de fase (carta de Nichols)
Existem vários motivos pelo qual é mais conveniente fazer a representação da
resposta numa escala logarítmica de frequência, como a transportabilidade da
resposta para qualquer valor de frequência. Do mesmo modo o uso de escala
logarítmica no traçado do ganho (módulo) permite contabilizar o efeito de
dispositivos em cascata de uma forma aditiva.
4 | P á g i n a

1. Histórico sobre Diagrama de Bode
Os diagramas de Bode (“Bode plots”) levam este nome devido à Hendrik Wade
Bode, um engenheiro americano que atuava principalmente nas áreas de eletrônica,
telecomunicações e sistemas.
Fig. 1 – Hendrik Wade Bode (1905-1982), americano.
Os diagramas de Bode (de módulo e de fase) são uma das formas de caracterizar
sinais no domínio da frequência. O uso de diagramas de Bode na análise da resposta em
freqüência de sistemas lineares foi introduzido em 1940 no estudo das características em
freqüência de amplificadores eletrônicos. A técnica desenvolvida por Bode foi,
posteriormente, largamente disseminada para análise e projeto de sistemas de controle.
Em linhas gerais, diagramas de Bode possibilitam uma aproximação efetiva da resposta
em freqüência de sistemas complexos pela combinação da resposta de fatores de
primeira e segunda ordem.
Embora atualmente os engenheiros responsáveis pelo desenvolvimento de projetos
de sistemas de controle tenham a sua disposição poderosas ferramentas computacionais
que diminuem sobremaneira a necessidade do traçado manual dos gráficos de módulo e
fase que compõe os diagramas de Bode, tal técnica ainda é bastante utilizada pela sua
facilidade, rapidez e quantidade de informações que se pode obter de um dado sistema
sob análise de forma bastante simplificada.
5 | P á g i n a

2. A Função de Transferência
O método proposto por Bode é constituído por dois gráficos. O primeiro gráfico
relacionado à magnitude da função de transferência G(jω) é traçado em função da
frequência em escala log-log. O segundo gráfico, relacionado à fase de G(jω), também é
traçado em função da freqüência, porém em escala linear-log. Esta estratégia permite-
nos traçar diagramas de resposta em freqüência sistemas de ordem elevada,
adicionando-se separadamente os gráficos relativos a cada um dos termos de primeira e
segunda ordem que compõe G(jω).
Os sinais são representados no domínio da frequência por funções de s, X(s),
Y(s), etc. Transformadas de Laplace ou por funções de jω:
X(jω), Y(jω), etc.
Se x(t) é a entrada de um sistema e y(t) é a saída deste mesmo sistema, em certas
aplicações podem ser mais interessante representar no diagrama de blocos estes sinais:
X(s), X(jω), Y(s) e Y(jω)
No domínio da frequência, em vez de no domínio do tempo conforme é ilustrado
na figura abaixo, onde G(s) e G(jω) são a reposta impulsional do sistema:
Fig. 2 – Diagrama de blocos com os sinais de entrada e saída representados no domínio da frequência.
6 | P á g i n a

3. Polos e Zeros da Função de Transferência
Considere agora a função de transferência G(s) de um sistema, depois de
reduzida para forma de fração racional da equação abaixo:
G(s)= q(s)
p(s)
E suponha que todos as eventuais raízes comuns de q(s) e p(s) tenham sido
canceladas e, portanto esta expressão acima está na forma irredutível.
3.1. Equação Característica:
O polinômio p(s) é chamado de polinômio característico de G(s), ou o
polinômio característico do sistema. A equação é chamada de a “equação
característica” do sistema:
p(s) = 0
3.2. Polos da função de transferência:
As raízes do polinômio característico são chamadas de polos de G(s) ou polos do
sistema. Ou seja, os polos são as soluções da equação característica.
Zeros da função de transferência:
As raízes do numerados de G(s) (q(s)) são chamadas de zeros de G(s) ou zeros do
sistema. Ou seja, os zeros são as soluções da equação q(s) = 0.
De maneira semelhante se define os polos e zeros de uma resposta impulsional G(s).
Considere a função de transferência G(s) dada pelo exemplo 1:
G(s)= 2(s+30)
s(s+2)(s²+2s+2)
7 | P á g i n a

É fácil de verificar que G(s) tem um zero em:
s = –30
E quatro polos, respectivamente em:
s = 0, s = –2, e s = –1 ± j
Sendo que: 2 são reais e 2 são complexos. Como s = 0 é um polo de G(s),
costuma-se dizer que este sistema tem um “polo na origem”. A equação característica
deste sistema é:
p(s) s (s+2)(s2 +2s+2) s4 4s3
6s2 4s
Exemplo 2: Considere agora a função de transferência G1(s) dada por:
G (s)= ___10 5 ______
(s+10)(s +10 s+10 )
Nitidamente G1(s) tem um “zero na origem”, ou seja, em s = 0 e três polos,
respectivamente em:
s 10 e s 50 j50√ 3
A equação característica deste sistema é:
P1 (s) (s+10)(s2 +102 s+104 ) s3 110 s2 11103 s 105
Exemplo 3: Considere agora a função G(s) dada por:
G(s) 10 s2
(s+a ) ( s+b )(s−c)
G(s) tem um “zero duplo na origem” (i.e., em s = 0) e quatro polos,
respectivamente em:
s = –a (duplo), s = –b2 e s = c.
8 | P á g i n a

3. Fatores para Construção do Diagrama de Bode
Os fatores básicos para a construção de um diagrama de Bode G(s) são funções
racionais em ‘s’. Qualquer G(s) da forma pode ser desmembrado em fatores básicos e
com isso a construção de um esboço do diagrama de Bode se torna mais simples.
4.1. O ganho de Bode (KB)
G(s) = KB
Um número K maior que uma unidade possui um valor positivo em decibéis,
enquanto um número menor que uma unidade tem valor negativo. A curva de módulo
em dB de um ganho constante K é uma reta horizontal de valor de valor 20log K
decibéis. O ângulo de fase do ganho K é zero. O efeito da variação do ganho K na
função de transferência é o de deslocar para cima ou para baixo a curva de módulo em
dB da função de transferência em um valor constante correspondente, mas isso não tem
nenhum efeito sobre a curva de ângulo de fase.
O valor decibel de qualquer número pode ser obtido com auxílio do gráfico
abaixo, quando um número aumenta em um fator de 10, o valor correspondente em
decibel fica acrescido de 20.
20 log ( K x 10 ) = 20 log K + 20
De maneira semelhante,
20 logK=−20 log1k¿¿
9 | P á g i n a

Figura 3 – Gráfico de conversão de um número em decibel.
4.2. Fatores integral e derivativo ( jω)∓1
O valor logarítmico de 1/jω em decibéis é:
20 log| 1jω|=−20 log ωdB
¿¿
O ângulo de fase de 1/jω é constante igual a -90º. No diagrama de Bode as
relações de frequência são expressas em termos oitavas ou de décadas. Uma oitava é um
intervalo de frequência de ω1 a 2ω1, onde ω1 é qualquer valor de frequência. Um década
corresponde a um intervalo de frequência de ω1 a 10 ω1, onde, novamente, ω1 é qualquer
valor de frequência.
Se for construído um gráfico de -20 log ω dB versus ω em escala logarítmica, o
resultado será uma reta. Para traçar esta reta, é necessário localizar um ponto (0dB,
ω=1) sobre ela. Como:
(-20 log 10ω) dB = (-20 log ω -20) dB
A inclinação da reta será -20dB/década ( ou -6dB/oitava). De maneira
semelhante o módulo de jω em decibéis é:
20 log| jω|=20 logω dB10 | P á g i n a

O ângulo de fase de jω é constante e igual a 90º. A curva do logaritmo do
módulo é uma reta com inclinação de 20dB/década. No gráfico abaixo se pode
visualizar as curvas de respostas em frequência para 1/jω e jω. Pode-se descrever com
clareza que as diferenças nas curvas das respostas em frequência dos fatores 1/jω e jω
estão nos sinais das inclinações das curvas do logaritmo de módulo e nos sinais dos
ângulos de fase. Ambas as grandezas logarítmicas tornam-se iguais a 0 dB em ω=1.
Figura 3 – (a) Diagrama de Bode de G(jω) = 1/jω; (b) diagrame de Bode de G(jω)=jω.
4.3. Fator de Primeira Ordem (1+ jωT )∓1
O módulo em dB do fator de primeira ordem 1/(jωT) é:
20 log|1+ jωT|=−20 log √1+ω2T 2 dB
Para baixas frequências, como ω ≪ 1T
, o módulo em dB pode ser aproximado
por:
−20 log √1+ω2 T2≑−20 log 1=0 dB
Assim a curva de módulo em dB em baixas frequências é uma reta de 0dB
constante. Para altas frequências, como ω≫ 1T
, essa é uma expressão aproximada para a
faixa de altas frequências. Em ω=1/T, o valor do módulo CE de 0dB; em ω=10/T o
11 | P á g i n a

módulo é de -20dB. Portanto, o valor de -20log ωT dB decresce em 20dB para cada
década de ω. Para ω≫ 1T
, a curva de módulo em dB é então, uma reta com uma
inclinação de -20dB/década ( ou -6dB/oitava).
−20 log √1+ω2 T2≑−20 log ωT dB
4.4. Fatores Quadráticos ¿.
Os sistemas de controle frequentemente possuem fatores quadráticos da forma:
G ( j ω)= 1
1+2ξ ( jωωn )+( j
ωωn )
2
Se ξ>1, esse fator quadrático pode ser expresso como um produto de dois
fatores de primeira ordem com polos reais. Se 0<ξ<1, esse valor quadrático é um
produto de dois fatores complexos conjugados. As aproximações assintóticas para as
curvas de resposta em frequência não são precisas para um fator com baixos valores de
ξ ,porque o módulo e a fase do fator quadrático dependem tanto da frequência de canto
como do coeficiente de amortecimento ξ .
Pode-se obter a curva assintótica de frequência como:
20 log| 1
1+2ξ( jωωn
)+( jωωn
)2|=−2 oLog√(1− ω2
ω2n)
2
+¿¿
Para baixas frequências, como ω ≪ωn, o módulo em dB passa a ser:
-20 log1=0 dB
Portanto, a assíntota de baixa frequência é uma reta horizontal em 0 dB. Para
altas frequências como ω≫ωn, o módulo em dB passa a ser:
-20 log ω2
ω2n
=−40 logωωn
A assíntota de alta frequência cruza a de baixa frequência em ω=ωn, pois nessa
frequência:
12 | P á g i n a

-40 log ωωn
=−40 log 1=0dB
Essa frequência ωné a frequência de canto do fator quadrático considerado.
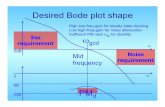
5. Conclusão
O tipo de método gráfico de análise baseado na resposta em frequência de um
sistema (Diagrama de Bode) é amplamente empregado no projeto de sistemas de
controle pela facilidade com que dados experimentais podem ser usados para propósito
de projetos, principalmente porque este método resulta em bons projetos mesmo diante
de incertezas sobre o modelo do processo. Neste método, estuda-se o comportamento da
saída de um sistema, em regime estacionário, mediante a aplicação de sinais senoidais
de frequência variável em torno de uma faixa de interesse. Um dos principais motivos
para se usar este tipo de representação é a resposta numa escala logarítmica de
frequência, como a transportabilidade da resposta para qualquer valor de frequência.
Do mesmo modo o uso de escala logarítmica no traçado do ganho (módulo)
permite contabilizar o efeito de dispositivos em cascata de uma forma aditiva. A
principal vantagem do Diagrama de Bode é que a multiplicação dos módulos dos fatores
de G(jω) é transformada em soma simples. Além disso, pode-se obter uma
representação rápida da resposta em frequência através das aproximações assintóticas.
Essas aproximações são válidas somente quando se deseja obter informações
superficiais a respeito da característica da resposta em frequência de um determinado
sistema. Para aplicarmos o Diagrama de Bode devemos “ter” sempre o sistema com
realimentação unitária negativa. Aplica-se o Diagrama de Bode somente a G(s), ou
seja, o sistema em malha aberta.
A representação logarítmica é útil pelo fato de que mostra tanto as características
de baixa frequência como aquelas de alta frequência, para a função de transferência
considerada, em um único diagrama. A expansão da faixa de baixa frequência utilizando
uma escala logarítmica é vantajosa, uma vez que as características de baixa frequência
são tipicamente mais importantes em sistemas práticos.
O gráfico logarítmico permite, com relativa facilidade, desenhar as curvas de
resposta em frequência. Além disso, a abordagem da resposta em frequência possui as
vantagens de que um sistema pode ser projetado de modo que os efeitos de ruídos
indesejáveis sejam desprezíveis. Uma vez que a amplitude de G(jω) é expressa em
13 | P á g i n a

decibéis (dB), produtos e divisões de fatores elementares G(jω) transformam-se em
adições e subtrações de ganhos, respectivamente. As curvas do ganho de G(jω) podem
ser aproximadas por segmentos de reta, o que permite um esboço rápido e simples, sem
o recurso a cálculos muito complicados.
Bibliografia
http://webx.ubi.pt/~felippe/texts2/an_sinais_cap9.pdf
www.feng.pucrs.br/~gacs/new/disciplinas/ascn/apostilas/Aula10.pdf
Engenharia de Controle Moderno. Ogata, Katsuhiko. Pearson Education, 4ªEdição, 2009.
14 | P á g i n a