Development of a Low Specific Speed, Centrifugal, Mini ...
12
49th International Conference on Environmental Systems ICES-2019-075 7-11 July 2019, Boston, Massachusetts Copyright © 2019 Collins Aerospace Development of a Low Specific Speed, Centrifugal, Mini Pump for a Two Phase Mechanically Pumped Fluid Loop Diego Mugurusa 1 , Michael Arner 2 , Caitlin Patruski 3 , Gary Adamson 4 Harold Hansen 5 Collins Aerospace, Windsor Locks CT, 06096 And Mark Neumann 6 Randstad Technologies, Windsor, CT 06095 In recent years, there has been significant interest in the development of two phase, mechanically pumped fluid loops (2φMPFL) for spacecraft thermal control. 2φMPFLs have significant performance, mass, and volume advantages over single phase MPFLs and passive loop heat pipe (LHP) systems, which are well documented in the literature. However, 2φMPFLs have several design challenges that must be addressed. One such challenge is the development of a highly reliable, long life fluid pump. 2φ MPFL systems tend to require low flow and relatively high pressure drop, most appropriate for positive displacement pumps. Traditionally, positive displacement pumps are not suitable for long life spacecraft applications or low viscosity fluids due to their inherent susceptibility to wear. Centrifugal pumps have been proven in long life spacecraft applications, but their behavior is not well known in this low specific speed regime. A low specific speed, miniature, centrifugal pump is being developed to address this challenge. The “mini pump” has been sized for use in 1-2 kW class, ammonia, 2φMPFL, for next generation spacecraft. This paper describes the development status of the mini pump, including results from the breadboard model testing. Nomenclature 2φ = Two-Phase ASIC = Application Specific Integrated Circuit ATCS = Active Thermal Control System BLDC = Brushless Direct Current CFD = Computational Fluid Dynamics ∆P = Differential Pressure EHD = Electro-hydrodynamic H = Head HED = Hall Effect Device kRPM = Thousand Revolutions per Minute MPFL = Mechanically Pumped Fluid Loop N, Ns = Pump Speed, Pump Specific Speed 1 Advanced Systems and Technology Engineer, Collins Aerospace, Mail Stop 1A2-Z62, 1 Hamilton Road, Windsor Locks, CT06096. 2 Principal Engineer, Collins Aerospace, Mail Stop 1A2-Z62, 1 Hamilton Road, Windsor Locks, CT06096. 3 Mechanical Design Engineer, Collins Aerospace, Mail Stop 1A2-Z62, 1 Hamilton Road, Windsor Locks, CT06096. 4 Advanced Systems and Technology Engineer, Collins Aerospace, Mail Stop 1A2-Z62, 1 Hamilton Road, Windsor Locks, CT06096. 5 Electrical Engineering Technical Fellow, Collins Aerospace, Mail Stop 1A2-Z62, 1 Hamilton Road, Windsor Locks, CT06096. 6 Project Engineer, Randstad Technologies, 2 Waterside Crossing Suite, 300, Windsor, CT 06095-1567
Transcript of Development of a Low Specific Speed, Centrifugal, Mini ...

49th International Conference on Environmental Systems ICES-2019-075 7-11 July 2019, Boston, Massachusetts
Copyright © 2019 Collins Aerospace
Development of a Low Specific Speed, Centrifugal, Mini
Pump for a Two Phase Mechanically Pumped Fluid Loop
Diego Mugurusa1, Michael Arner2, Caitlin Patruski3, Gary Adamson4 Harold Hansen5
Collins Aerospace, Windsor Locks CT, 06096
And
Mark Neumann6
Randstad Technologies, Windsor, CT 06095
In recent years, there has been significant interest in the development of two phase,
mechanically pumped fluid loops (2φMPFL) for spacecraft thermal control. 2φMPFLs have
significant performance, mass, and volume advantages over single phase MPFLs and passive
loop heat pipe (LHP) systems, which are well documented in the literature. However,
2φMPFLs have several design challenges that must be addressed. One such challenge is the
development of a highly reliable, long life fluid pump.
2φ MPFL systems tend to require low flow and relatively high pressure drop, most
appropriate for positive displacement pumps. Traditionally, positive displacement pumps are
not suitable for long life spacecraft applications or low viscosity fluids due to their inherent
susceptibility to wear. Centrifugal pumps have been proven in long life spacecraft
applications, but their behavior is not well known in this low specific speed regime.
A low specific speed, miniature, centrifugal pump is being developed to address this challenge.
The “mini pump” has been sized for use in 1-2 kW class, ammonia, 2φMPFL, for next
generation spacecraft. This paper describes the development status of the mini pump,
including results from the breadboard model testing.
Nomenclature
2φ = Two-Phase
ASIC = Application Specific Integrated Circuit
ATCS = Active Thermal Control System
BLDC = Brushless Direct Current
CFD = Computational Fluid Dynamics
∆P = Differential Pressure
EHD = Electro-hydrodynamic
H = Head
HED = Hall Effect Device
kRPM = Thousand Revolutions per Minute
MPFL = Mechanically Pumped Fluid Loop
N, Ns = Pump Speed, Pump Specific Speed
1 Advanced Systems and Technology Engineer, Collins Aerospace, Mail Stop 1A2-Z62, 1 Hamilton Road, Windsor
Locks, CT06096. 2 Principal Engineer, Collins Aerospace, Mail Stop 1A2-Z62, 1 Hamilton Road, Windsor Locks, CT06096. 3 Mechanical Design Engineer, Collins Aerospace, Mail Stop 1A2-Z62, 1 Hamilton Road, Windsor Locks, CT06096. 4 Advanced Systems and Technology Engineer, Collins Aerospace, Mail Stop 1A2-Z62, 1 Hamilton Road, Windsor
Locks, CT06096. 5 Electrical Engineering Technical Fellow, Collins Aerospace, Mail Stop 1A2-Z62, 1 Hamilton Road, Windsor Locks,
CT06096. 6 Project Engineer, Randstad Technologies, 2 Waterside Crossing Suite, 300, Windsor, CT 06095-1567

International Conference on Environmental Systems
2
NPSH = Net Positive Suction Head
Q = Volumetric Flow Rate
RPM = Revolutions per Minute
SN = Serial Number
TRL = Technology Readiness Level
I. Introduction
echanically pumped fluid loops (MPFL) have been used for spacecraft control since the Gemini program1. In
an MPFL, heat is transported from a heat source (such as a cold plate) to a heat sink (such as a radiator) by a
liquid coolant. The coolant is circulated around a loop by a mechanical pump. In a single phase MPFL, the coolant
remains in the subcooled liquid state throughout the entire loop; all of the heat exchanged with the liquid is sensible
heat, resulting in a temperature change of the liquid. In a two phase (2φ) MPFL, the coolant is allowed to boil at the
heat source and condense at the heat sink; the majority of the heat exchanged with the coolant is latent heat; resulting
in minimal temperature change of the coolant.
Recently, there has been increasing interest in 2φMPFLs for spacecraft thermal control. Some of the advantages
of 2φMPFLs over single phase systems are:
- High Thermal Conductance: Higher heat flux with a lower temperature difference between the heat source
and the coolant are possible in a 2φ heat exchanger than in a single phase heat exchanger.
- Heat Source Isothermality: Since the heat collection is achieved by boiling the coolant at nearly constant
pressure, the coolant temperature at the heat source is nearly constant. Therefore, spatial isothermality of the
heat source can be achieved at significantly lower flow rates than with a single phase MPFL.
- Radiator Isothermality: Since heat rejection in a radiator is achieved by condensing the coolant at nearly
constant pressure, the coolant temperature in the radiator is nearly constant. As a result, average temperature
of a condensing radiator will be higher than a single phase radiator, for the same inlet temperature. The
higher thermal conductance of a two phase system drives a smaller overall temperature drop from the heat
source to the radiator, also driving a higher radiator temperature than a single phase MPFL. As a result, a
smaller, lighter radiator is required to reject a given heat load than for a single phase MPFL.
- Low pumping power: For a given system heat load, a 2φMPFL generally requires a lower flow rate than a
single phase MPFL due to the latent heat of vaporization of the coolant, resulting in lower pumping power.
These advantages enable lower weight, volume, power, and better thermal performance than single phase MPFLs
and are a key technology enabler for certain spacecraft payloads. However, the advantages of a 2φMPFLs come at
the cost of the increased complexity. Specifically, the following technical challenges are associated with the fluid
pump.
- Phase Management: Fluid pumps generally require subcooled liquid at their inlet to operate reliably and
efficiently. This implies the need for a microgravity compatible phase management device to prevent vapor
from entering the pump, which would occur whenever a two phase mixture is exiting the condenser, such as
during thermal transients. Collins Aerospace has developed and flown both active and passive microgravity
phase separators. In a spacecraft 2φMPFL, such a device would have to be located upstream of the pump.
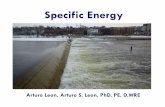
- Subcooling and NPSH: There is a strong
desire to minimize the amount of subcooling in
the design of some 2φMPFL’s, since
subcooling increases the size of the radiator and
reduces isothermality in the evaporator. The
desire to minimize subcooling is in direct
competition with the pump’s minimum required
Net Positive Suction Head (NPSHr). NPSHr is
the amount of excess pressurization of the fluid
above saturation required at the pump inlet to
prevent pump cavitation. NPSHa is the amount
of excess pressurization available in the system.
If NPSHa < NPSHr, the pump will cavitate.
M
Figure 1. Relationship between Subcooling and NPSHa

International Conference on Environmental Systems
3
The relationship between subcooling and NPSH is not constant; it depends on the fluid and operating
temperature as shown in Figure 1.
- Low Specific Speed (Pressure Drop vs. Flow): In a 2φMPFL, large sections of the system will have high
vapor volume fractions. Due to the much lower density of vapor compared to liquid, the fluid in these
sections has a much higher flow velocity and thus a much higher pressure drop. As a result, 2φMPFLs have
a relatively high pressure drop and low flow rate. This effect can be mitigated by increasing the flow area in
certain sections of tubing, but in general, 2φMPFL customers tend to specify pump requirements with
relatively high pressure rise and low flow rate as compared to single phase MPFLs. Specific Speed, Ns, is a
quasi dimensionless parameter that is used to categorize pumps. It is defined by the following equation:
𝑵𝒔 =𝑵√𝑸
𝑯𝟑𝟒
In this equation, N is the pump rotational speed, Q is the Pump volumetric flow rate, and H is the Pump head
rise. Low specific speeds (low flow and large pressure rise) are best suited for positive displacement pumps.
However positive displacement pumps are typically not suitable for long-life spacecraft thermal control
systems because of their inherent susceptibility to wear and fatigue.
II. Target Application Requirements
NASA’s Jet Propulsion Lab (JPL) is developing a 2φMPFL for thermal control of deep space science missions.
JPL considers 2φMPFL an enabling technology for launching a small spacecraft on the order of 250 kg to the outer
planets and they have correctly identified the fluid pump as a technology gap2. Collins Aerospace has collaborated
with JPL over the past several years to close this technology gap.
This effort involved three distinct phases. In the first phase, Collins performed a trade study to down-select the
appropriate pump technology for the application, based on the following requirements provided by JPL:
- Operating Fluid: Ammonia
- Flow Rate: 100 ml/min at design point
- Pressure Rise: 6 psid (41.4 kPad) at design point
- Power Consumption: Goal <5W, Threshold <10W, at design point
- Operating Life: 15 years. 500 kRad Total Ionizing Dose
- Cycle Life: 1,000 start/stop cycles
- Supply Voltage: 24-36 VDC
- NPSH: Minimize
- Weight: <2.0 kg (pump + controller); <0.5 kg (pump only)
At a saturation temperature of 25°C, the design point flow rate of 100 ml/min, and using the full latent heat of
vaporization of ammonia (1165 J/g) results in a heat rejection capability of roughly 1.2 kW. Running the pump at a
higher speed and increasing the flow rate to ~170 ml/min, would support a heat rejection rate of roughly 2 kW.
Therefore, this pump fits the needs of a 2φMPFL rejecting on the order of 1-2kW of heat. Other customers have also
expressed interest in similar design requirements to support a 1-2 kW class 2φ MPFL.
In the second phase, Collins designed a breadboard model of the pump with internal geometry that is representative
of a flight design. In the third phase, Collins manufactured, assembled, and tested the breadboard model and then
delivered it to JPL for integration into their 2φMPFL test system.
III. Pump Technology Trade Study
In order to determine the optimum pump configuration to meet these requirements, a fundamental technology trade
study was completed focusing on four key areas, hydraulics, bearings, motor and motor controller.
A. Hydraulic Technology
The pumping technology selected is a key determinant in the overall performance characteristics of the final
design. It is the key strategic selection from which nearly all other design features and decisions flow. For this reason

International Conference on Environmental Systems
4
a trade study encompassing nearly all possible hydraulic technologies was conducted. Although details may vary, all
known pumping technologies fall under some branch of the chart in Figure 2.
Figure 2. Pump Hydraulic Types
In order to determine the most appropriate technology, performance information on each type of pump technology
was cataloged from published sources for devices of a relevant scale. The devices ranged in maturity from
commercially available for purchase to limited production products. Technologies which have yet to be commercially
available were not considered in the trade as they were deemed to be not mature enough for immediate deployment.
Key characteristics with weightings were formulated and each device was assigned a score per the guidelines in Table
1 to Table 3. Some characteristics were intentionally excluded from the list, which may come as a surprise, so they
are justified below:
- Weight and Volume: At such low flow rates the weight and volume was not significantly different
between the technologies because the data collected for all devices was limited to a size relative to the
requirements for this application.
- Shock & Vibe capability: At the conceptual level all pumps can be designed to withstand shock and vibe
with similar design approaches. This capability is more a function of the detailed design than the hydraulic
technology.
- Hydraulic Efficiency: The fundamental hydraulic efficiency is not critical for this application due to the
very low hydraulic power required. At the design point, the hydraulic power is only ~0.07W, therefore an
overall efficiency of only 1.4% is needed to meet the power goal. Higher efficiency is nearly always
desirable but in this case it was not considered to be a major determinant in the ideal selection. As long as
the technology can meet a very minimal hydraulic efficiency (roughly 2%) it could be feasible for this

International Conference on Environmental Systems
5
application. As efficiency increases above 2%, the incremental reduction in input power is very small i.e.
there are diminishing returns with increased efficiency.
Table 1. Key Characteristics
Characteristic Weight Description
Meets flow and head
performance
5 Pump technology must be capable of meeting flow and head rise
requirements
Life (15 years) 5 Desired life is 15 years with no maintenance
Fluid compatibility 5 Technology must be compatible with ammonia
NPSHr 3 Pump must be capable of operating with ~45ft of NPSHa
Shaft speed (0 to 100,000 rpm) 3 Shaft speeds need to be within the realm of feasibility
Bearing loading ≤ 1 lbf (<4.5 N) 3 Technology must not require excessive load capability from the
bearing system
Low viscosity slip 3 Technology should not exhibit high degrees of fluid slip.
Ammonia being a low viscosity fluid will leak between any fixed
clearances from high pressure areas to low pressure areas resulting
in low volumetric efficiency
Vibration emissions 3 Vibration emissions could impact payload and sensors
Vapor Capability 2 No vapor is expected to be present but if it does occur during off
design conditions a pump that does not vapor lock is more
desirable.
Pressure ripple 2 Constant / consistent pressure and flow output is more desirable to
avoid system perturbations
Table 2. Weighting criteria
Weight Description
1 Minimal system / mission impact if requirement is not met
2 Some impact to system performance if requirement is not met. Requires addition of minor
hardware, controls or margins to compensate
3 Significant impact to system performance if not met. Requires addition of significant hardware,
controls or margin to compensate
4 Major impact to system performance, some high level system requirements cannot be met. Mission
is partially compromised.
5 Critical to system performance, mission cannot proceed if not met. No suitable workaround.
Table 3. Scoring guidelines
Score Description
0 Impossible to meet characteristic in foreseeable future, immediate showstopper
1 Not suitable, very difficult to achieve required performance, invention required
2 Somewhat suitable, some development required to achieve to characteristic
3 Suitable but additional hardware or design features required to compensate or already demonstrated
in somewhat similar application or on similar equipment
4 Very suitable, capability already demonstrated in a relevant size range or very similar application
A partial emission, centrifugal technology was deemed to be the most suitable, with some potential exceptions as
noted below. In general the primary characteristics that determined the outcome were, 15 year life, bearing loading,
and vibration emissions. In general, positive displacement type devices did not score well in these areas.
The partial emission technology was superior over other centrifugal machines primarily due to its performance
capability at low specific speeds. A partial emission design utilizes a radial bladed impeller to generate a vortex of
fluid in a concentric bowl. A small amount of the fluid is extracted from the rotating fluid vortex via a tangential
diffuser wherein the velocity head is converted to static pressure. Partial emission designs vary from traditional, full
emission, centrifugal designs in that the radial velocity is very small in comparison to the tangential velocity. In a

International Conference on Environmental Systems
6
partial emission design the fluid rotates with the impeller over many more revolutions than a full emission design
before reaching the discharge port. This results in greater hydraulic efficiency at low flow, high head operating regions
as compared to full emission designs operating at the same flow and head.
Potential exceptions which required further investigation or development are:
- Piezo driven diaphragm pump with passive check valves. This is seen as a potentially superior strategy
given further development and product maturation. At the time of the study limited performance and life
data was available.
- Electro-hydrodynamic (EHD) and Electro-osmotic pumps appear to have unique advantages, however
sufficient performance and life data for a range of operating conditions and fluids was not readily available
to make a meaningful assessment and it was unclear if EHD technology was compatible with anhydrous
ammonia.
B. Bearing Technology
With the pump technology decided the next task was to identify the appropriate bearing technology which would
be required to support the hydraulic and magnetic loads generated by the impeller and rotor. Bearing technologies
considered were subdivided as shown in Figure 3.
Figure 3. Bearing Technologies
Bearing technology was assessed in a similar fashion as the hydraulic technology. The characteristics, and
weightings are shown below, the scoring criteria was the same as previously defined above. Notable exclusions from
the list of key characteristics are the following:
- Load Capability: All bearing types can potentially support expected loads, 0 – 1 lbf (0 –4.5 N).
- Speed capability: All bearing types could be designed to operate in the expected speed range of 5 – 20
krpm
- Start / Stop wear: All bearing types are capable of meeting start stop requirements (1000 cycles) with
minimal wear.

International Conference on Environmental Systems
7
Table 4. Bearing Key Characteristics
Characteristic Weight Description
Reliability 5 Within the expected life of a bearing how reliable will it be, simpler design =
higher reliability, less parts to fail
Life / wear (15 years
continuous operating)
5 Life of the bearing at expected speed and loads, high wear rates = short life,
rolling element will suffer from material fatigue
Weight 5 Relative weight of the bearing system and ancillary equipment if required
Volume 5 Relative volume of the bearing system and ancillary equipment if required
Power Consumption 5 Power consumption of the bearing system, rotor drag or external power if
required
Radiation Hardness 3 Fundamental capability of technology to meet radiation requirements
Stability 3 Susceptibility of technology to rotor dynamic oscillatory modes, may limit
speeds of operation or mass.
Noise / Vibe emission 3 Expected vibration or noise emission of bearing system
Stiffness 2 Magnitude of centering force for a given displacement. A low stiffness bearing
may require greater clearances
Hydrodynamic bearings were identified as the technology of choice for this application primarily due to their
simplicity and life capability. Rolling element bearings were very attractive as well except for one critical
shortcoming, life. Given that a two phase ammonia loop is unlikely to be tolerant of any type of lubricant it was
decided that a 15 year life was highly doubtful. Active magnetic bearings were viewed with interest as well but were
ultimately not the best choice due to additional weight, volume and power consumption. Passive magnetic bearings
were also recognized as an elegant solution however suffered from fatal flaws regarding stability and low stiffness.
C. Motor / Motor Controller
For success in the design of pump system, the motor and controller must be designed together. For this program
a sensorless Brushless DC (BLDC) motor/controller design was chosen primarily because of the lack of required
sensors in the motor. For a motor of this size the sensors will take up a disproportionate amount of volume. In addition,
the HED sensors can be a limit to the application of the motor to space environments for both radiation and temperature
limitations. The HED, being a semiconductor device, can affect overall reliability, especially at high temperatures.
For terrestrial applications the sensorless approach is preferred and there are many commercial ASIC (application
specific integrated circuit) solutions that allow for the design of efficient sensorless motor controllers. For space
applications there are some challenges that need to be addressed; primarily the availability of radiation hardened
electronics. There are no radiation hardened ASIC solutions on the market today. A sensorless controller can be
implemented using radiation hardened FPGA (which is the Collins approach used on other programs for sensorless
controllers) or with radiation hardened microprocessors, depending on environments. Both of these solutions are
possible but represent more complex electronics than what is used in a commercial ASIC approach. It is expected in
a space craft sub-system that the sensorless controller functionality could be integrated into the existing processor
electronics as the I/O requirements are limited and processing overhead is small. This allows designs to take advantage
of this existing hardware to reduce overall complexity. Collins has designed, qualified and flown sensorless
controllers driving pumps of a larger size.
D. Technical Risks
Having selected the fundamental technologies, partial emission centrifugal, hydrodynamic bearings, canned
brushless DC motor and sensorless controller, the integration of these technologies progressed into the conceptual
design phase. Several design risks were identified early in the design phase and analysis was conducted to mitigate
the risks as described below.
The near miniature size of this design posed risk in several areas just due to scaling. At this scale hydraulic designs
suffer increasingly from parameters that do not scale with flow rate such as clearances, manufacturing tolerances and
surface finish. Correction factors to compensate for performance in this scale are not available and therefore the
design team relied upon a combination of analytical tools (Computational Fluid Dynamics modeling) and empirical
test data collected from subassembly prototypes that were additively manufactured and tested in water.
Technical challenges associated with the motor were also primarily due to physical size: manufacturing and
assembling the very small parts. Additionally motor performance in this size regime suffers disproportionately due

International Conference on Environmental Systems
8
to a relatively large “air” gap between the stator iron and the rotor magnets. Eddy current losses are also elevated due
to scaling and the shaft speed required to generate the head with a small diameter impeller. All of these factors
contribute to lower overall efficiency of the pump assembly.
IV. The Breadboard Model “Mini Pump”
Given the technical risks identified in the trade study and design
phases, a breadboard model of the pump was built and tested. A
picture of the breadboard mini pump is shown in Figure 4. The
breadboard mini pump internal configuration, materials, and geometry
are representative of a flight design. To save time and cost, the
external geometry was not optimized for weight or volume. The mini
pump parts are assembled with bolted joints and o-seals for ease of
assembly and disassembly; these joints would most likely be welded
in a flight design.
The pump was designed with two separate bearing recirculation
flow paths, one external and one internal. The purpose of including
both flow paths was to demonstrate a concept for an internally ported
bearing recirculation flow path, leaving the external flow path as a
back-up in case the concept didn’t work as well as intended. Testing
in water was performed with each recirculation flow path
configuration (internal blocked, external open and external blocked,
internal open). Initial testing indicates the internal flow path is viable
but may require some additional design work to optimize localized
heat gain. Elimination of the external recirculation tube reduces the overall weight and volume of the mini pump.
The mass of the breadboard “mini pump” is 0.5 kg, max.
The volume with the external circulation tube is 3.81cm x 6.86
cm x 12.22cm. Without the external circulation tube, the volume
is 3.81 cm x 6.86 cm x 8.33 cm. The breadboard unit is mainly
constructed of stainless steel 304L and Inconel 625 machined
parts, with the exception of the motor outer housing, which is
titanium.
For a flight unit, weight and volume could be reduced by
eliminating the bolted connections and using weld joints. The
materials of construction would not need to change, but there is
an option to go to titanium housings to reduce weight by almost
half and this change would also reduce the losses in the stator to
increase efficiency. The material of the housings will be
dependent on the compatibility with the fluid, in addition to load
requirements and/or weight requirements. Given the fact that the pump is so small and light, then mass and volume
penalty for adding a redundant pump to improve overall system reliability is also small.
Due to the nature of being a breadboard unit, this unit did not go through a full tolerance study like a flight unit.
With the lack of tolerance study, some clearances were not established between the impeller and reverse thrust surface
of the bearing. To rectify this in the breadboard unit, shims were created to get the desired clearance between the
impeller and the reverse thrust surface and bowl.
Three prototype demonstration units were built to support simultaneous testing at Collins Aerospace and multiple
customer facilities. The prototype design allows for alternative stator and rotor designs to be evaluated. Currently we
have plans to evaluate performance of 2 alternate stators and 3 alternate rotors. The test results discussed in the
following section are exclusively based on testing from the first unit, designated as Serial Number (SN) 001.
Figure 4. Breadboard Model Mini Pump
SN002 (Scale in inches)
Figure 5. Mini Pump Impeller Figure 6. Mini Pump Impeller

International Conference on Environmental Systems
9
V. SN001 Test Results in Water
The breadboard model was tested in a simple, open loop, Water based test set up in Collins Aerospace’s engineering
lab to characterize the hydraulic performance and compare with predictions. A diagram of the test setup is shown
in Figure 7 and a picture is shown in Figure 8.
Figure 7. Water Test Setup Schematic
Figure 8. Photo of Water Test Setup
A commercial-off-the-shelf, sensorless BDC motor controller was used to drive the pump motor. The DC power
supplying the controller was set to 24 ± 1 VDC for all of the test points. For each test point, the controller was set to
run at a fixed speed, a metering valve was used to set the desired pump pressure rise, and the resulting volumetric flow
rate and pump motor input power was measured. A 15 psid (103 kPad), Orange Research, differential pressure gauge
with 0.5 psid (3.45 kPad) demarcations was used to measure pressure rise. Volumetric flow rate was measured by
collecting the pump discharge in a graduated cylinder and timing with a stopwatch. A Yokogawa WT1600 digital

International Conference on Environmental Systems
10
power meter was used to measure the three phase power being supplied to the motor. Motor surface temperature and
water outlet temperature were measured with thermocouples taped to the motor outer housing and immersed in the
pump outlet tube, respectively.
Initially, we had some trouble getting consistent data and pump pressure rise tended to degrade throughout the
course of the test. After some investigation, this was attributed to gas bubbles collecting near the inlet of the pump,
due to the open loop setup and gas entrainment. The set up and test procedure were modified to reduce gas
entrainment, which led to more consistent results. In a flight system, it is standard practice de-gas operating fluid and
to pull a vacuum on the loop prior to charging it with the de-gassed operating fluid, so the the amount of non-
condensable gas present in the system would be extremely small. Any small amount of non-condensable gas present
in the system would be trapped by the pump inlet filter or by a microgravity phase separator upstream of the pump.
Nevertheless, this experience highlighted the pump’s sensitivity to entrained gas bubbles due to its small size.
Once the setup issues were resolved, points were gathered along several constant speed lines (13,160 RPM, 16,600
RPM, 18,670 RPM, 20,080 RPM, and 22,160 RPM) and with various bearing recirculation flow configurations
(External Only, No Recirculation, and Internal Only). Hydraulic performance data for the Internal Only and No
Recirculation configuration for a subset of the speeds is shown in Figure 9.
The mini pump’s hydraulic design point, corrected for the higher density of water compared to ammonia, but not
corrected for viscosity, is 100 ml/min, 9.8 psid. The equivalent power consumption goal (5W) and threshold (10W),
corrected for the higher density of water, but not corrected for viscosity, is 8.2W and 16.4W, respectively. This point
is shown as a red dot in Figure 9. Based on CFD analysis, the expected speed required to hit this point was ~18,750
RPM.
In the Internal Only recirculation flow configuration, a speed of ~20,080 RPM and a power consumption of ~9.8W
was required to hit this point. Near the expected speed, 18,666 RPM, the pressure rise was roughly 8.3 psid at 100
ml/min. This means that the pump’s pressure rise was about 15% lower than predicted, power was about 20% higher
than the goal.
The No Recirculation flow configuration performed slightly better, but it is not a realistic configuration since some
recirculation flow is needed to flush the bearing and cool the motor. However, this data is still valuable, since it
represents an upper limit on the performance of the breadboard pump design. The flatness of the Internal Only curve
suggests that there might be an opportunity to optimize the internal flow path to reduce the recirculation flow and gain
back some performance.
Figure 9. Hydraulic Performance of SN001 in Water, Internal Only and No Recirculation Flow
Figure 10 shows the pump motor input power for the points shown in Figure 9Figure 10. The fact that pump
power is primarily a function of speed and not flow indicates that speed related losses are dominating the power
consumption. This is easily explained when one considers that the actual hydraulic power is very small compared to
the motor input power. Clearly the majority of the input power is consumed in parasitic losses that are speed dependent
such as viscous and eddy current losses. If a large portion of these speed dependent losses are viscous losses, then
the pressure rise and power consumption may improve when the pump is run in ammonia.

International Conference on Environmental Systems
11
Figure 10. Power Consumption of SN001 Pump in Water
After the SN001 water performance test was completed, the SN002 and SN003 breadboard mini pumps were
subjected to a baseline performance test to confirm that its performance was comparable to SN001. After this was
confirmed, the SN002 and SN003 pumps were subjected to a 600 psig (4137 kPag) proof pressure and helium leak
test. The leakage rate was 3 x 10-6 scm3/s. The pump was delivered to JPL for integration into their development,
Ammonia based, 2φMPFL system.
VI. Conclusions and Future Work
A long-life, low specific speed, miniature, centrifugal pump is being developed to address the needs of an
ammonia based 2φMPFL, for future 1-2 kW spacecraft thermal control systems. A detailed trade study was performed
to down-select the best hydraulic, bearing, motor, and controller technology for the application. A partial emission,
hydrodynamic bearing, canned, brushless, sensorless DC motor driven pump was selected as a result of the trade
study.
Several technical risks were identified in the trade study. These risks were primarily related to the fact that we
are attempting to scale a high TRL technology down in size and up in speed to a range that is unprecedented in the
spacecraft thermal control industry. To address these risks, a breadboard model of the mini pump was designed,
fabricated, and initially tested in water.
Overall, the mini pump’s performance was reasonably close to predictions for a first iteration design, but it
underperformed in pressure rise by about 15% and exceeded power predictions by about 28%. Further analysis and
testing is required to understand this performance shortfall, however, performance may improve when testing in
ammonia due to reduced viscosity. The system level test at JPL will help characterize pump performance in ammonia
and will address the risks of integration with a two phase system.
In 2019, Collins Aerospace is continuing characterization testing of the mini pump. We are creating a
standalone, closed loop, test stand that will overcome the limitations of the open loop test setup. The closed loop test
stand will allow performance characterization of current and future mini pumps in multiple refrigerants, including
ammonia. The future testing will include determination of the pump’s NPSHr as a function of flow rate; which will
give a better idea of the subcooling constraints that need to be imposed on the 2φMPFL. Future testing will also
include characterization of the pump’s vibration emissions, optimization of the bearing recirculation flow, and
potentially a life test to validate the bearing design.

International Conference on Environmental Systems
12
References 1http://geminiguide.com/Systems/cooling.html
2Sunada, Eric, et al. "A Two-Phase Mechanically Pumped Fluid Loop for Thermal Control of Deep Space Science Missions."
46th International Conference on Environmental Systems, 2016.
Acknowledgements
A portion of this work at Collins Aerospace was carried out with funding from Jet Propulsion Laboratory. The
authors would like to thank Eric Sunada for backing this project. The authors gratefully acknowledge the support
from the JPL Research and Technology Development office that provided funding for the work.