DESIGN OF AN ELECTRICALLY CONTROLLED … of an Electrically Controlled Eddy Current Brake v List of...
71
DESIGN OF AN ELECTRICALLY CONTROLLED EDDY CURRENT BRAKE Cordelia Mac A Thesis submitted in part fulfilment of the requirements for the degree of Bachelor of Engineering CO-OP School of Engineering and Information Technology Charles Darwin University Darwin June 2014
Transcript of DESIGN OF AN ELECTRICALLY CONTROLLED … of an Electrically Controlled Eddy Current Brake v List of...
DESIGN OF AN ELECTRICALLY CONTROLLED
EDDY CURRENT BRAKE
Cordelia Mac
A Thesis submitted in part fulfilment of the requirements for the degree of
Bachelor of Engineering CO-OP
School of Engineering and Information Technology
Charles Darwin University
Darwin
June 2014
Design of an Electrically Controlled Eddy Current Brake i
Abstract
Keywords: Eddy Current Brake Design, Wouterse, Torque, Speed, Current,
Eddy current brakes (ECB) utilise electromagnets to generate smooth braking torque in contrast
with traditional friction braking. A disadvantage is the low braking forces experienced at low
speeds and as a consequence, the moving object never ceases its motion.
The aim of this research is to develop and construct an electrically controlled ECB for research
on an application specific motor at Charles Darwin University (CDU).
A literature review was conducted into previous works on ECBs and three theoretical models
were identified. Between the models Schieber, Smythe and Wouterse, the Wouterse method
appeared most appropriate as it is both simple and applicable for this application.
The determination of the magnetisation curve of the core material provides the characteristics
required to design the ECB. The load line was determined for specific currents to provide a
theoretical flux density in the air gap. These values were also confirmed experimentally. The
design indicated that in order to achieve the required specifications and constraints, a large
number of turns and core would be required. The final constructed design was tested using the
permanent magnet synchronous motor (PMSM) at CDU to confirm the simulated torque, speed
and current values.
In order to confirm the flux travelling through the air gap, a Gaussmeter was used to
experimentally measure the flux. The results for the torque versus speed was collected using
Labview. This provided torque and speed readings through a torque sensor and incremental
encoder. As the aluminium disc did not completely occupy the cross sectional area of the core’s
air gap, the results confirm that in order to achieve the simulated results, the current required
will need to be increased.

Design of an Electrically Controlled Eddy Current Brake ii
Acknowledgments
I would like to express my appreciation to my supervisor Damien Hill for his patience,
guidance, encouragement and useful critique throughout this thesis. I would also like to thank
Chris Lugg for being my co-supervisor and for being available to discuss mechanical related
aspects in this thesis. Special thanks to Ben Saunders for critiquing my ideas. Finally, I would
like to thank my parents, siblings and partner for their encouragement throughout my studies.
Design of an Electrically Controlled Eddy Current Brake iii
Contents
1 Introduction ........................................................................................................... 1
1.1 Aim of the Research....................................................................................... 1
1.2 Constraints ..................................................................................................... 2
1.3 Research Approach ........................................................................................ 2
1.4 Overview of Chapters .................................................................................... 2
2 Literature Review .................................................................................................. 3
2.1 Electromagnetic Theory ................................................................................. 3
2.1.1 Maxwell’s Second Equation ................................................................... 3
2.1.2 Magnetic Circuits ................................................................................... 4
2.2 Back Electromotive Forces (Back EMF) ....................................................... 7
2.3 Eddy Current Brakes (ECBs) ......................................................................... 7
2.3.1 Models .................................................................................................. 10
2.4 Finite Element Analysis (FEA) .................................................................... 15
3 Determination of Magnetisation Curve ............................................................... 17
4 Final Design ........................................................................................................ 24
4.1 Calculations: ................................................................................................ 25
4.1.1 Corresponding Flux Density used in Torque Calculations ................... 25
4.2 Critical Speed ............................................................................................... 30
4.3 Design trade-offs .......................................................................................... 31
4.4 Construction ................................................................................................. 32
4.5 Experimental Set-up..................................................................................... 34
5 Results ................................................................................................................. 36
5.1 Validity of assumptions ............................................................................... 36
5.2 Eddy Current Brake Testing Results............................................................ 36
5.2.1 Torque Offset ........................................................................................ 36
5.2.2 Testing .................................................................................................. 37
5.3 Discussion .................................................................................................... 43
5.3.1 Experimental set-up .............................................................................. 43
5.4 Improvements .............................................................................................. 45
5.5 Summary of results ...................................................................................... 46
6 Conclusion ........................................................................................................... 47
7 Future Works ....................................................................................................... 48
Design of an Electrically Controlled Eddy Current Brake iv
8 References ........................................................................................................... 50
Appendices ................................................................................................................. 52
Appendix A: Matlab Files ....................................................................................... 52
Appendix B: Calculations for 1000 and 2000 turns................................................ 59
Appendix C: Proposed Design ................................................................................ 61
Design of an Electrically Controlled Eddy Current Brake v
List of Symbols
φ = Flux (Wb)
�⃗� = Magnetic Flux Density (Tesla (T))
∆𝑠 = Surface
∇ = Used to represent a 3 dimensional vector �⃗� (x,y,z)
B = Magnetic flux intensity produced by Eddy Currents (Wb)
B’ = Magnetic flux of an external field (Wb)
γ = Electric conductivity (in the x-y plane for Equation 5) (Siemens/metre S/m)
𝐸𝑏 = Back EMF (V)
𝐾𝑣 = Back EMF constant
ω = Angular velocity (rad/s)
ρ = resistivity of the material (ohm-metre - Ωm)
𝜏𝑑 = Braking torque (N.m)
𝑃𝑑 = Power dissipated (W)
�̇� = Velocity of disc (m/s)
𝑑 𝑜𝑟 𝑏 (Equation 17) 𝑜𝑟 𝑡 = disc thickness (m)
D = Diameter of the magnet core (m)
R or m= Distance pole is from centre of disc (m)
σ = Conductivity of material (disc) (Siemens/metre S/m)
𝜇0= Permeability of free air (4𝜋 ∗ 10−7 𝐻𝑚−1)
E = Electric Field intensity (Newtons/Coulomb – N/C)
𝑣 = Velocity (m/s)
Design of an Electrically Controlled Eddy Current Brake vi
T= Torque (Equation 15)
R = Reluctance in Equation 11(At/wb)
𝜑0 = Flux penetrating the sheet at rest (Maxwells) (10−8 𝑤𝑒𝑏𝑒𝑟𝑠)
𝛿 = Sheet thickness (m)
R = Radius of electromagnet (m) in Equation 15
a or r = Disc radius (m)
a and B ( Equation 17) = Cross sectional width and length of core respectively (m)
l= Mean length of core (m)
i= Excitation current of coil (A)
N = Number of turns
Design of an Electrically Controlled Eddy Current Brake vii
List of Tables
Table 1 Copper excess against proportionality factor c for low speed dragging force [21] ..... 13
Table 2 Comparison of Flux Density Values ........................................................................... 28
Table 3 Relationship between Current and Number of Turns .................................................. 31
Table 4 Configuration Table for 2 coils ................................................................................... 32
Table 5 Current for 1000 turns ................................................................................................. 59
Table 6 Current for 2000 turns ................................................................................................. 60
Design of an Electrically Controlled Eddy Current Brake viii
List of Figures
Figure 1 Right-hand rule [4] ....................................................................................................... 4
Figure 2 Flux density distribution between two permanent magnets [6] ................................... 5
Figure 3 Magnetization Curve [4] .............................................................................................. 6
Figure 4 Determination of B due to air gap [8] .......................................................................... 7
Figure 5 Mathcad Model torque/speed curve, final design, 10 A coil current [19] ................... 9
Figure 6 Lines of Flow of Eddy Currents induced in rotating disc by two circular pole magnets
[2].............................................................................................................................................. 11
Figure 7 Torque versus speed for large disc rotating between four rectangular pole pairs of an
electromagnet measured by Lentz[2] ....................................................................................... 12
Figure 8 Diagram of Eddy Current Brake Variables [10] ........................................................ 14
Figure 9 Relationship between voltage, current and number of turns ...................................... 18
Figure 10 Magnetisation Curve Set up [29] ............................................................................. 19
Figure 11 Experimental set up .................................................................................................. 19
Figure 12 Main coil current vs. sensing voltage ....................................................................... 20
Figure 13 Hysteresis Curve ...................................................................................................... 21
Figure 14 BH Curve with all points.......................................................................................... 22
Figure 15 BH Curve ................................................................................................................. 23
Figure 16 Eddy Current Brake Experimental Set-Up [21] ....................................................... 24
Figure 17 determining the corresponding flux for a given current ........................................... 27
Figure 18 Torque vs. Speed (via Experimental BH Curve values) restricted at 3Nm ............. 29
Figure 19 2000 turn electromagnet prior to fibreglass encasement .......................................... 33
Design of an Electrically Controlled Eddy Current Brake ix
Figure 20 Fibreglass encasement .............................................................................................. 34
Figure 21 Experimental Set-up ................................................................................................. 35
Figure 22 Amount of aluminium disc present in the electromagnet ........................................ 35
Figure 23 Offsets observed in experimental data ..................................................................... 37
Figure 24 0.1A for experimental data, theoretical with and without factors ............................ 38
Figure 25 0.2A for experimental data, theoretical with and without factors ............................ 38
Figure 26 0.3A for experimental data, theoretical with and without factors ............................ 39
Figure 27 0.4A for experimental data, theoretical with and without factors ............................ 39
Figure 28 0.5A for experimental data, theoretical with and without factors ............................ 40
Figure 29 1.0A for experimental data, theoretical with and without factors ............................ 40
Figure 30 2.0A for experimental data, theoretical with and without factors ............................ 41
Figure 31 3.0A for experimental data, theoretical with and without factors ............................ 41
Figure 32 4.0A for experimental data, theoretical with and without factors ............................ 42
Figure 33 5.0A for experimental data, theoretical with and without factors ............................ 42
Design of an Electrically Controlled Eddy Current Brake 1
1 Introduction
Charles Darwin University (CDU) has conducted experimental research on minimising the
torque ripple experienced by permanent magnet synchronous motors (PMSM). However, the
load is manually adjusted and therefore, for this test system, the load is unknown. An
electromagnetic braking system, such as an eddy current brake (ECB), can provide a known
time-varying load with a certain bandwidth, a frictionless braking system and known
parameters for the PMSM research.
An electromagnetic braking system such as an ECB consists of a core with a small air gap, and
a rotating disc with conductive properties. This coil encases a core material which has magnetic
properties. The number of turns in the coil is dependent on the desired magnetic field strength
and braking force. Eddy currents produce an opposing magnetic field to slow down an object
such as a conductive rotating disc. These forces are created by inducing a current through the
coil when a disc, with conductive properties rotate within the air gap. The magnitude of these
forces is dependent on the conductivity of the conductor and the rate the magnetic field changes.
This thesis will detail the development and construction of an electrically controlled ECB for a
known load provided by the axial flux PMSM.
The structure of this thesis will consist of conducting the following:
Literature review on previous works with ECB,
Design to meet the specified requirements prior to the construction of the ECB itself,
Discussion of results which will confirm the accuracy of the theoretical design
parameters,
Recommendations for suggested future works.
1.1 Aim of the Research
The aim of this research is to develop and construct an electrically controlled ECB for a specific
application motor under research at CDU.
Design of an Electrically Controlled Eddy Current Brake 2
1.2 Constraints
The constraints of this thesis include the following:
Torque of a minimum value of 0.3 Nm
Voltage restriction of 60V DC
Frequency must be able to be analysed from 1Hz to 10Hz
1.3 Research Approach
Completion of the research goal involved the following tasks:
1. A literature review of:
Published ECB Models
Magnetic Circuits
2. Experimentation of:
Magnetisation Curve (Hysteresis and B-H Curve)
3. Design of the ECB
4. Construction of ECB and discussion of results
5. Conclusions
6. Future works
1.4 Overview of Chapters
Chapter 2 is separated into the electromagnetic theory, back electromotive forces, ECBs and
finite element analysis. Chapter 3 details the determination of the magnetisation curve for the
core material which will be used in the construction of the ECB. The importance of this chapter
will be further discussed in Chapter 4.1. Chapter 4 details the design stages which will be
undertaken to achieve a working model of the ECB. Chapter 5 details the findings and
discussion for the experimentation of the ECB. The findings from this chapter will provide
recommendations for further research in chapter 7.

Design of an Electrically Controlled Eddy Current Brake 3
2 Literature Review
2.1 Electromagnetic Theory
2.1.1 Maxwell’s Second Equation
Guru and Hiziroglu (1998) used Maxwell’s second equation to enable the computation of the
electric field intensity at a fixed point in space when magnetic field is a function of time.
Maxwell developed four equations for electromagnetism which describe the interaction
between electrically and magnetically charged bodies [1]. This theorem has been used by
Smythe (1942) to demonstrate the behaviour of eddy currents on a rotating disc [2]. As Gauss’
Law states, the net electric flux density is equivalent to the total charge enclosed by that surface
[3]. Magnetic flux in conjunction with Gauss’ Law can be used to derive the second Maxwell
equation where Smythe refers to this particular equation of Maxwell’s in his analysis [1] [3].
Given that the magnetic flux may not be uniformly distributed across the surface, the magnetic
flux can be determined by dividing the surface into infinite n surfaces with the assumption that
the Magnetic Flux (B) field is passing through each n surface with identical strengths [3]. The
total magnetic flux is determined by the summation of the n amounts of micro surfaces [3]:
Equation 1
𝛷 = ∑ �⃗� 𝑖 ∙ ∆𝑠 𝑖𝑛𝑖=1 [3]
The above equation can be simplified further as the surface area approaches zero as shown in
Equation 2 [3]:
Equation 2
𝛷 = ∫ �⃗� 𝑖 ∙ 𝑑𝑠⃗⃗⃗⃗ 𝑠
[3]
The flux which passes through the surface is zero only if the magnetic flux density is tangential
to the surface [3]. With the assumption that the magnetic field is uniform within the solenoid,
the magnetic field strength can be altered with variations in the current [4]. As a result, the
amount of magnetic flux lines for north and south poles are exactly the same [3]. Therefore, the
flux which penetrates a closed surface is the same as the flux leaving the surface [3]. By the
application of the above equation to a closed surface, the equation then becomes:
Equation 3
𝛷 = ∮ �⃗� ∙ 𝑑𝑠⃗⃗⃗⃗ 𝑠
[3]
Design of an Electrically Controlled Eddy Current Brake 4
Using the divergence theorem, the closed surface integral can be converted into a volume
integral. The volume under consideration is not always equal to zero. [3] The final equation can
be written as:
Equation 4
∇ ∙ �⃗� = 0 [3]
The above equation is known as Gauss’ Law of magnetic fields and demonstrates that the
magnetic flux density is solenoidal due to the divergence of B which equals zero at all points
of in the field [3]. Smythe determines the boundaries by combining Maxwell’s first equation
with ohm’s law and writing out the z components to give:
Equation 5
±𝜕𝐵𝑧
′+𝐵𝑧
𝜕𝑡=
1
2𝜋𝑏𝛾 𝜕𝐵𝑧
𝜕𝑧 [2]
Equation 6
∇ 𝑋 𝐵 = 0 [2]
By combining Equation 4 with Equation 5 and Equation 6 , B will be determined [2].
2.1.2 Magnetic Circuits
In an electromagnet, the magnetic field, otherwise known as the flux, is created by inducing
currents through coils wound on ferromagnetic materials. The right hand rule (Figure 1)
demonstrates the relationship between current and magnetic flux. [5]
Figure 1 Right-hand rule [4]
Design of an Electrically Controlled Eddy Current Brake 5
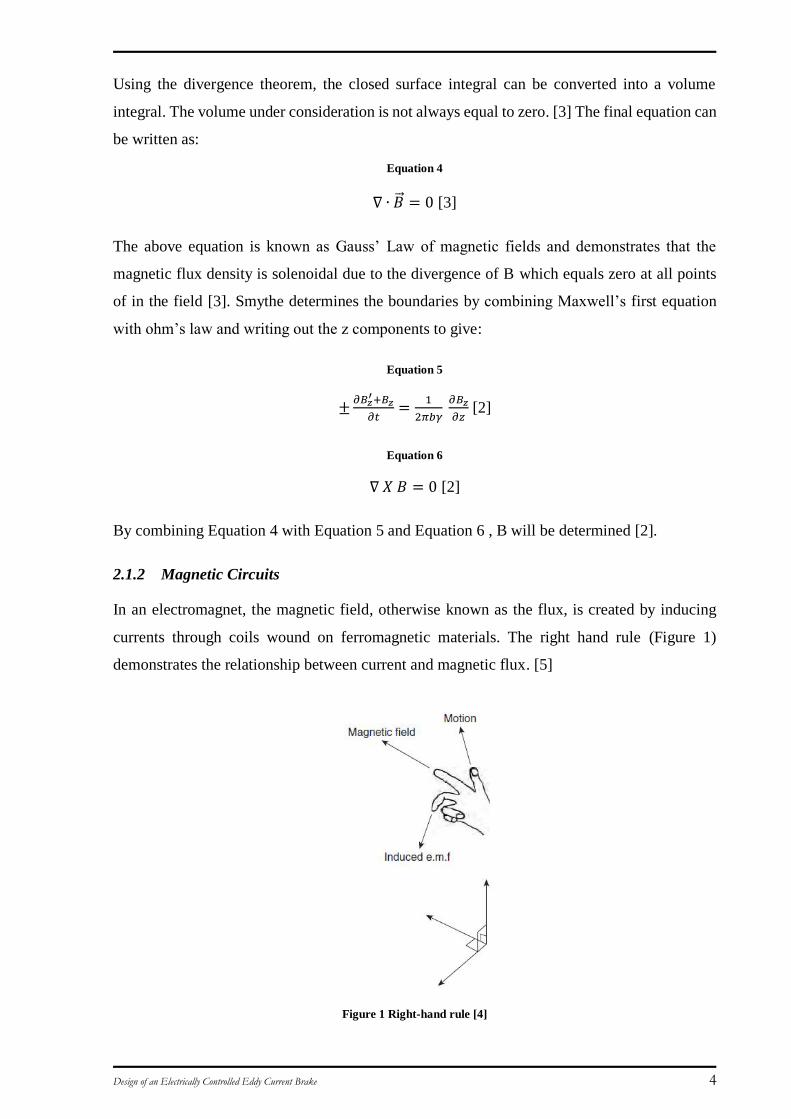
Karakoc (2012) also explains that for permanent magnets, as the flux leaves the core and enters
the air gap, the magnetic field lines “bulges” out of the straight linear line and curves back into
the opposing pole. Due to this behaviour, the flux in the core differs from the air gap, these non-
uniform fields are known as fringing fields [6]. Stray fields are also discussed by Karakoc
(2012) where the fields leave from the core surface of the permanent magnet and enters through
the core surface of the opposing pole [6]. This is presented in Figure 2. This behaviour can
possibly be experienced with electromagnets potentially provide a possible explanation to the
behaviour of flux.
Figure 2 Flux density distribution between two permanent magnets [6]
For calculations that involve applications such as eddy current brakes (ECBs), the flux density
(B) and field intensity (H) are important parameters in terms of determining the number of turns
required, reluctance (magnetic circuit equivalent of a resistor) and current for the core. The
relationship between B and H is such that the magnetic flux density can be determined by
multiplying H by permeability (µ=µ0µcore). The permeability of the medium can then be
determined by multiplying relative permeability of the medium by the permeability of free air.
[5]
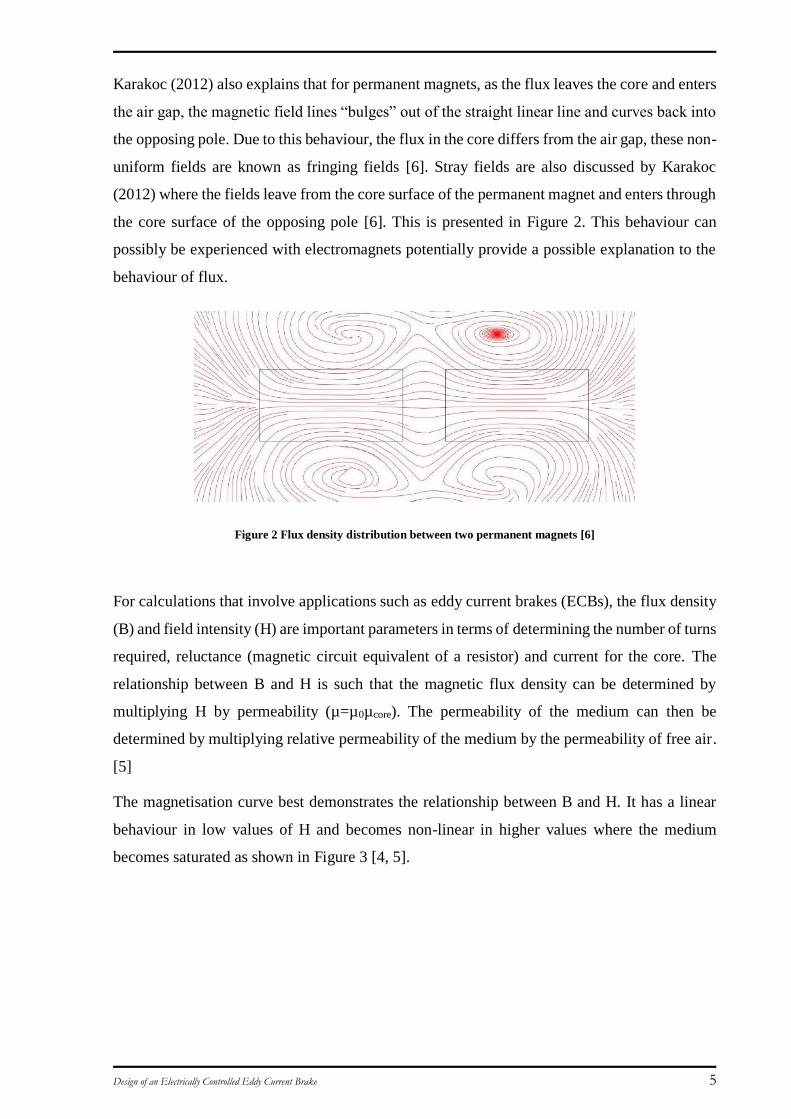
The magnetisation curve best demonstrates the relationship between B and H. It has a linear
behaviour in low values of H and becomes non-linear in higher values where the medium
becomes saturated as shown in Figure 3 [4, 5].
Design of an Electrically Controlled Eddy Current Brake 6
Figure 3 Magnetization Curve [4]
In circumstances where the air gap is small in comparison to the cross sectional area of the core,
the fringing effects are often neglected, hence making the cross sectional areas the same in
calculations [5]. The magnetic circuit can be transposed into the form of an electric circuit.
Instead of having voltage, current, and resistance, it has a magnetomotive force (mmf),
reluctance and flux. These variables are used to determine the ECB parameters required for the
final design in chapter 4.
However, the BH curve for the air gap can be graphically determined and redrawn [7]. This
method states that for a constant cross sectional area, the flux can be determined graphically.
The magnetisation curve is drawn by drawing a line with a slope of (-µ0/L where L=mean flux
path) from the given air gap mmf. The resulting intersection provides the flux density in the air
gap. Figure 4(a) illustrates the behaviour of the BH curve with an air gap. In this method, the
field intensity axis has been multiplied by the mean length. [7] Sen (1997) also describes this
method in determining the flux present in the air gap.
Dependent on the material of the core, the core material can be separated into either soft or hard
ferromagnetic materials based on observation of the hysteresis curve. Soft ferromagnetic
materials are used in eddy currents, electric machines and transformers [8]. This is discussed in
chapter 3.
Design of an Electrically Controlled Eddy Current Brake 7
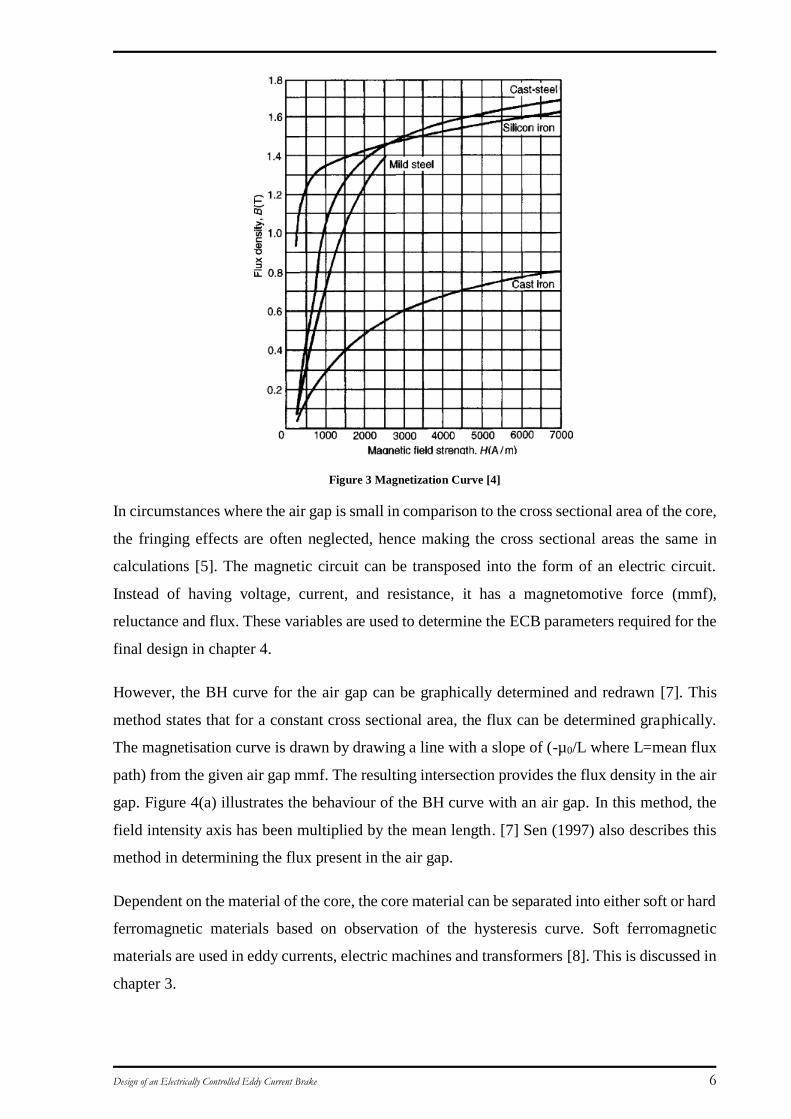
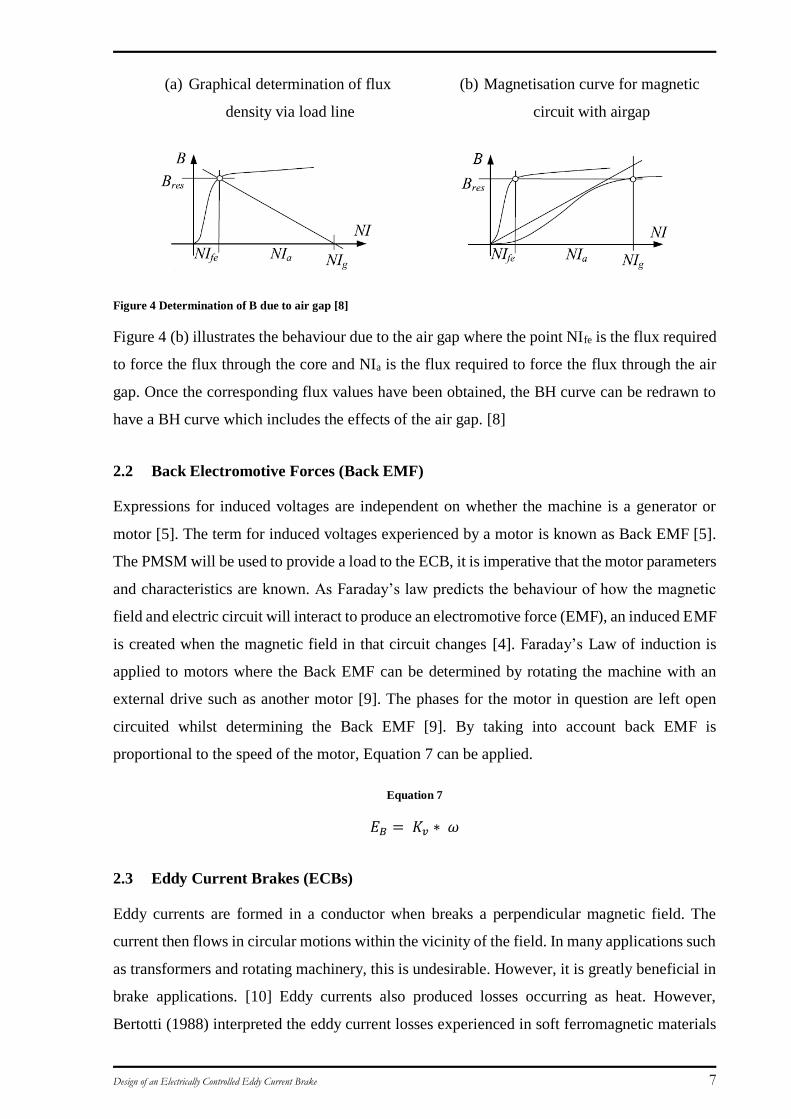
(a) Graphical determination of flux
density via load line
(b) Magnetisation curve for magnetic
circuit with airgap
Figure 4 Determination of B due to air gap [8]
Figure 4 (b) illustrates the behaviour due to the air gap where the point NIfe is the flux required
to force the flux through the core and NIa is the flux required to force the flux through the air
gap. Once the corresponding flux values have been obtained, the BH curve can be redrawn to
have a BH curve which includes the effects of the air gap. [8]
2.2 Back Electromotive Forces (Back EMF)
Expressions for induced voltages are independent on whether the machine is a generator or
motor [5]. The term for induced voltages experienced by a motor is known as Back EMF [5].
The PMSM will be used to provide a load to the ECB, it is imperative that the motor parameters
and characteristics are known. As Faraday’s law predicts the behaviour of how the magnetic
field and electric circuit will interact to produce an electromotive force (EMF), an induced EMF
is created when the magnetic field in that circuit changes [4]. Faraday’s Law of induction is
applied to motors where the Back EMF can be determined by rotating the machine with an
external drive such as another motor [9]. The phases for the motor in question are left open
circuited whilst determining the Back EMF [9]. By taking into account back EMF is
proportional to the speed of the motor, Equation 7 can be applied.
Equation 7
𝐸𝐵 = 𝐾𝑣 ∗ 𝜔
2.3 Eddy Current Brakes (ECBs)
Eddy currents are formed in a conductor when breaks a perpendicular magnetic field. The
current then flows in circular motions within the vicinity of the field. In many applications such
as transformers and rotating machinery, this is undesirable. However, it is greatly beneficial in
brake applications. [10] Eddy currents also produced losses occurring as heat. However,
Bertotti (1988) interpreted the eddy current losses experienced in soft ferromagnetic materials
Design of an Electrically Controlled Eddy Current Brake 8
as a competition between the external magnetic fields and highly inhomogeneous counter fields
which are due to the interaction between eddy currents and the microstructural interactions.
These soft ferromagnetic materials are used in a majority of electrical machines and
transformers. [8].
ECBs are used with many applications that are associated with high speeds such as trains and
roller coasters. With the use of permanent magnets to aid in braking systems, the application
becomes reliable due to the brake being independent of an energy source [11]. The
disadvantages associated with the permanent magnet braking system are the brake pads utilised
for the final braking motion’s performance being reduced at every use [12]. Losses in heat and
friction occur in this application. However, in the case where the brake capacity requires
increasing, the magnetic force of the magnets must be increased by reducing the air gap [13].
ECBs on the other hand do not use frictional forces similar to those used in conventional
braking, but they do require an energy source or may exist as an additional load on the existing
power source. As Lenz’s Law states that as a circuit is moved through a magnetic field, the
current induced opposes the motion of the original field [14] (p. 448). Eddy currents are used
in conjunction with Lenz’s law to create reverse magnetic field which aids in the deceleration
of a moving metal object [12]. Provided that the braking torque is expressed as a function of
the angular velocity of the disc and current, if the current were to remain constant, the angular
velocity will appear to be proportional to the braking torque [15]. This is favourable for high
speeds but not in low speeds approaching zero due to saturation of the applied current [15]. In
an ECB, the system experiences no losses in friction but in heat from the conductors [12]. Many
studies for calculating the braking torque and eddy current assumes that the power dissipated is
used for generating the braking torque; applying the Lorentz force with the aid of an imaginary
current path on the disc and resistance determined by experiment; and by the finite element
method (FEM) [15]. Gosline et. al (2006) observes the braking torque to “vary linearly with
angular velocity and quadratically magnetically” (p. 230) as observed in Equation 8. Gosline et
al (2006) also utilises an equation from Wiederick et. Al (1986) which suggests that there is a
point where the eddy currents will be counteracted with back EMF thus making it behave non-
linear for a certain speed onwards [16, 17].
Equation 8
𝜏𝑑 =𝑃𝑑
�̇�=
𝜋
4𝜌𝐷2𝑑𝐵2𝑅2�̇� [18]
Design of an Electrically Controlled Eddy Current Brake 9
Equation 9
𝑣𝑐 = 2
𝜎𝜇0𝑑 [18]
Equation 9 provides the characteristic velocity which may be used to determine the critical
speeds [18, 19]. The σ, μ and d stand for conductivity, permeability and disc thickness
respectively. Gosline et. al (2006) uses an aluminium 3mm thick disc which has a characteristic
velocity of 19m/s. [18]
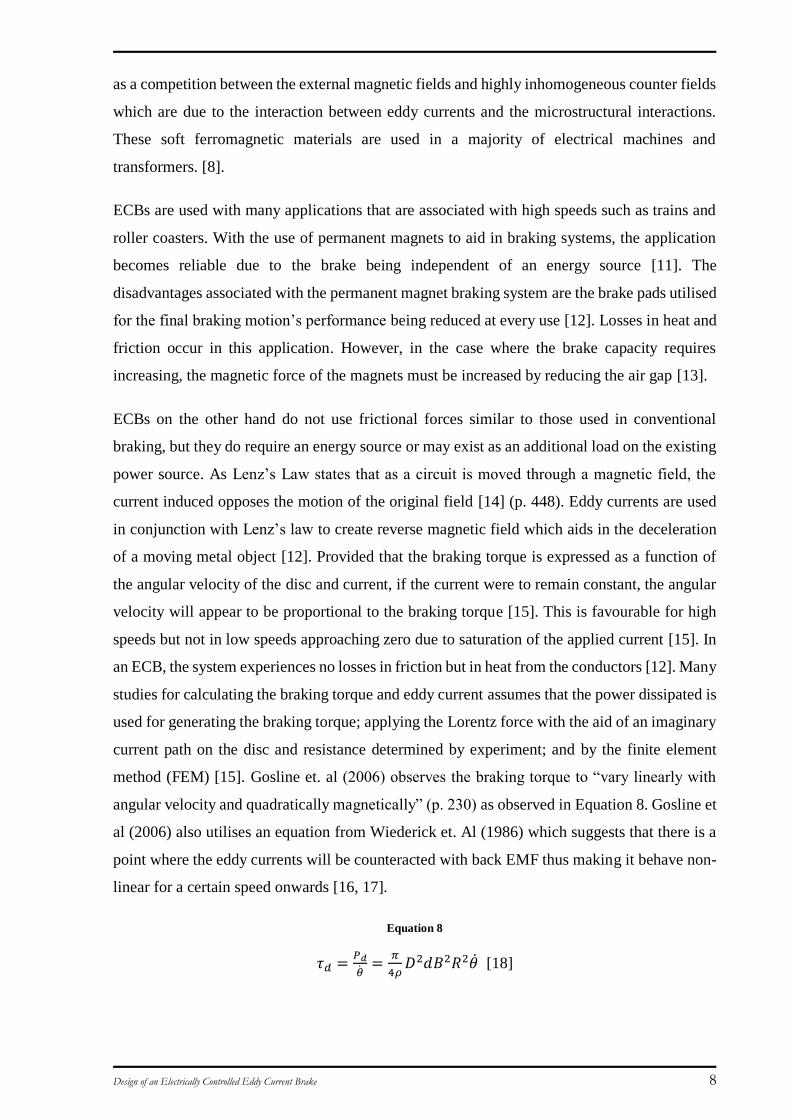
Caldwell and Taylor (1998) utilises Wouterse’s journal to explain Figure 5. In the operation of
an ECB, Gosline et. al (2006) also observed the behaviour in Figure 4 as did Caldwell and
Taylor (1998). Their observations include that the torque tends to vary linearly with the speed
as mentioned previously, however, the magnetic flux created for the disc is counteracted at
speeds greater than the critical speed. At speeds greater than the critical speed, Back EMF
reduces the torque achieved [19]. This is observed by the non-linear behaviour after
approximately 100 RPM in Figure 5. Gosline et al (2006) also assumes that in order to obtain
a linear relationship between torque and speed, the conductive disc must be within the cross
sectional area of the air gap. Thus, when the speed is below the critical speed and the conductive
disc is within the cross-sectional air gap area, a linear torque and speed relationship occurs.
Figure 5 Mathcad Model torque/speed curve, final design, 10 A coil current [19]
Design of an Electrically Controlled Eddy Current Brake 10
In theory, the breaking torque of the ECB can be expressed as a function of speed, torque and
current [15]. An ECB may be required to be used in conjunction with other conventional brake
systems due to the uncontrollable behaviour at low speeds [15].The drawback of this system is
that it is difficult to implement the brake at low speeds as the eddy currents oppose the field
proportionally and perpendicularly due to the relationship established by Equation 10 [20].
Equation 10 [20]
𝐸 = 𝑣 𝑥 𝐵
Observations from journals suggest that for different speeds in the air gap magnetic field, the
following applies:
At low speeds, the magnetic induction B is less than the 𝐵0 generated at zero speed
and therefore, theoretically, the magnetic induction B will be almost perpendicular
to the disc
At the critical speed region, where the braking force is a maximum, the average
induction under the pole of the electromagnet is significantly lower than 𝐵0 due to
the magnetic induction caused from the eddy being no longer comparable with 𝐵0
And finally, at high speeds, the magnetic induction decreases to the point where the
eddy currents cancels the magnetic field at infinite speeds
[20]
Karakoc (2012) suggests that if a soft magnetic core is used for an ECB, a field will be induced
in the core itself. Consequently, this results in non-linear relationships between the torque and
speed [6]. Karakoc (2012) also suggests that for low speeds, the rotational effects are dominant
over the induction effects. This is present in Karakoc’s (2012) small-scale model and FEM
results.
2.3.1 Models
There have been three major models that have been used and developed for eddy current braking
systems. The three models are Wouterse, Smythe and Schieber. These are reviewed in detail
below.
Wouterse’s model stems from Rudenberg’s ECB. Rudenberg designed a brake which would be
energised by direct current. Furthermore, Rudenberg made the assumption that the poles were
situated near each other in order to model the current and magnetic field via sinusoidal
functions. As mentioned in 2.3, heat is one of the foremost problems associated with ECBs.
Design of an Electrically Controlled Eddy Current Brake 11
Due to materials available today for the construction of the ECB, it has led to heat problems in
the disc due to power densities within the materials used. This has resulted in the requirement
for cooling techniques and wider spacing of the poles. As the ECB is a machine, the
mechanically absorbed power is dispersed by the disc. [21]
Smythe continued Rudenberg’s works investigating the current distribution surrounding the
pole on the disc. Smythe was successful in determining a relationship in the low speed region
but not for high speeds. [21]
Additionally, Schieber came to the same conclusion as Smythe but did not explore the high
speed region. Instead, the relationship for a linearly moving strip was determined. [21]
Many of those mentioned above found similar conclusions where the torque behaviour at high
speeds was asymptotic. Wouterse puts forth that if the pole is surrounded by a conducting slip
ring, it theoretically provides no resistance in the return path for the currents. In turn, this would
satisfy Smythe and Schieber’s theory regarding current patterns present in the disc. Wouterse
came to the conclusion that for low speeds, the drag force is proportional to speed however,
Wouterse found the existence of the resistance in the return path. [21]
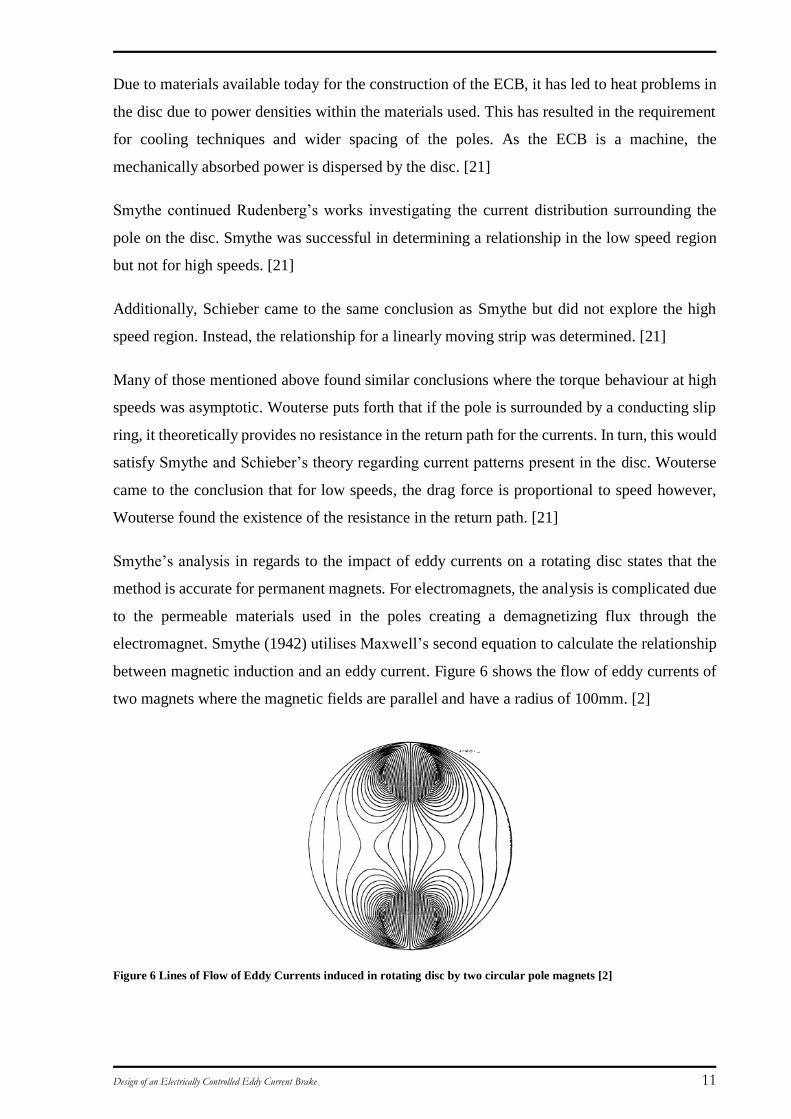
Smythe’s analysis in regards to the impact of eddy currents on a rotating disc states that the
method is accurate for permanent magnets. For electromagnets, the analysis is complicated due
to the permeable materials used in the poles creating a demagnetizing flux through the
electromagnet. Smythe (1942) utilises Maxwell’s second equation to calculate the relationship
between magnetic induction and an eddy current. Figure 6 shows the flow of eddy currents of
two magnets where the magnetic fields are parallel and have a radius of 100mm. [2]
Figure 6 Lines of Flow of Eddy Currents induced in rotating disc by two circular pole magnets [2]
Design of an Electrically Controlled Eddy Current Brake 12
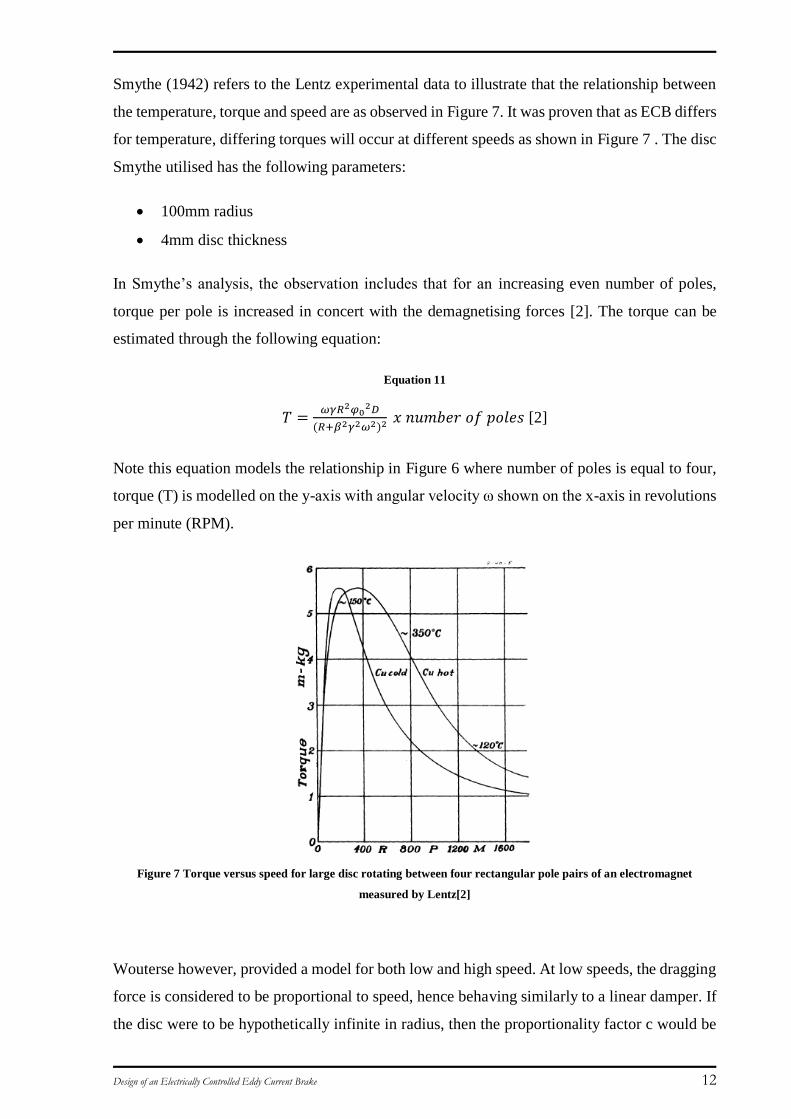
Smythe (1942) refers to the Lentz experimental data to illustrate that the relationship between
the temperature, torque and speed are as observed in Figure 7. It was proven that as ECB differs
for temperature, differing torques will occur at different speeds as shown in Figure 7 . The disc
Smythe utilised has the following parameters:
100mm radius
4mm disc thickness
In Smythe’s analysis, the observation includes that for an increasing even number of poles,
torque per pole is increased in concert with the demagnetising forces [2]. The torque can be
estimated through the following equation:
Equation 11
𝑇 =𝜔𝛾𝑅2𝜑0
2𝐷
(𝑅+𝛽2𝛾2𝜔2)2 𝑥 𝑛𝑢𝑚𝑏𝑒𝑟 𝑜𝑓 𝑝𝑜𝑙𝑒𝑠 [2]
Note this equation models the relationship in Figure 6 where number of poles is equal to four,
torque (T) is modelled on the y-axis with angular velocity ω shown on the x-axis in revolutions
per minute (RPM).
Figure 7 Torque versus speed for large disc rotating between four rectangular pole pairs of an electromagnet
measured by Lentz[2]
Wouterse however, provided a model for both low and high speed. At low speeds, the dragging
force is considered to be proportional to speed, hence behaving similarly to a linear damper. If
the disc were to be hypothetically infinite in radius, then the proportionality factor c would be

Design of an Electrically Controlled Eddy Current Brake 13
half that of the proportionality factor c of a brake with a slip ring. The slip ring will aid in
altering c as shown in Table 1 [21] .
Table 1 Copper excess against proportionality factor c for low speed dragging force [21]
At high speeds, the magnetic induction tends to decrease and behave asymptotically as
Zimmermann and Smythe have concluded [21]. Wouterse’s model is defined in Equation 12.
Equation 12
𝐹𝑒 =1
4
𝜋
𝜌𝐷2𝑑𝐵0
2𝑐𝑣 [21]
Wouterse’s refined model to match Smythe’s findings for low speeds is defined in Equation 13
where c is defined in Equation 14:
Equation 13
𝐹𝑒 =1
4
𝜋
𝜌𝐷2𝑑𝐵0
2𝑐𝑣 [21]
Equation 14
𝑐 =1
2[ 1 −
1
4
1
(1+𝑅
𝐴)2(𝐴−𝑅
𝐷)2 [21]
The factor C has been introduced by Wouterse to take into account the resistance present in the
return path for the eddy current and external magnetic field [10, 21]. Assumptions are made
such that the flux generated by the coil provides torque in terms of speed [20]. The current value
is integrated within B.
Comparing Schieber’s outcome (Equation 15) with Wouterse’s proposed model, the two are
similar with a few simplifications in Equation 13 [21]. Schieber’s model and Smythe’s model,
can be applied for either permanent magnets or electromagnets.
Equation 15
𝑇 =1
2𝜎𝛿𝜔𝜋𝑅2𝑚2𝐵𝑧
2[1 −(𝑅
𝑎)2
[1−(m
a)2]2 ∗ 1.0 × 10−7 𝑁𝑚[22]
Design of an Electrically Controlled Eddy Current Brake 14
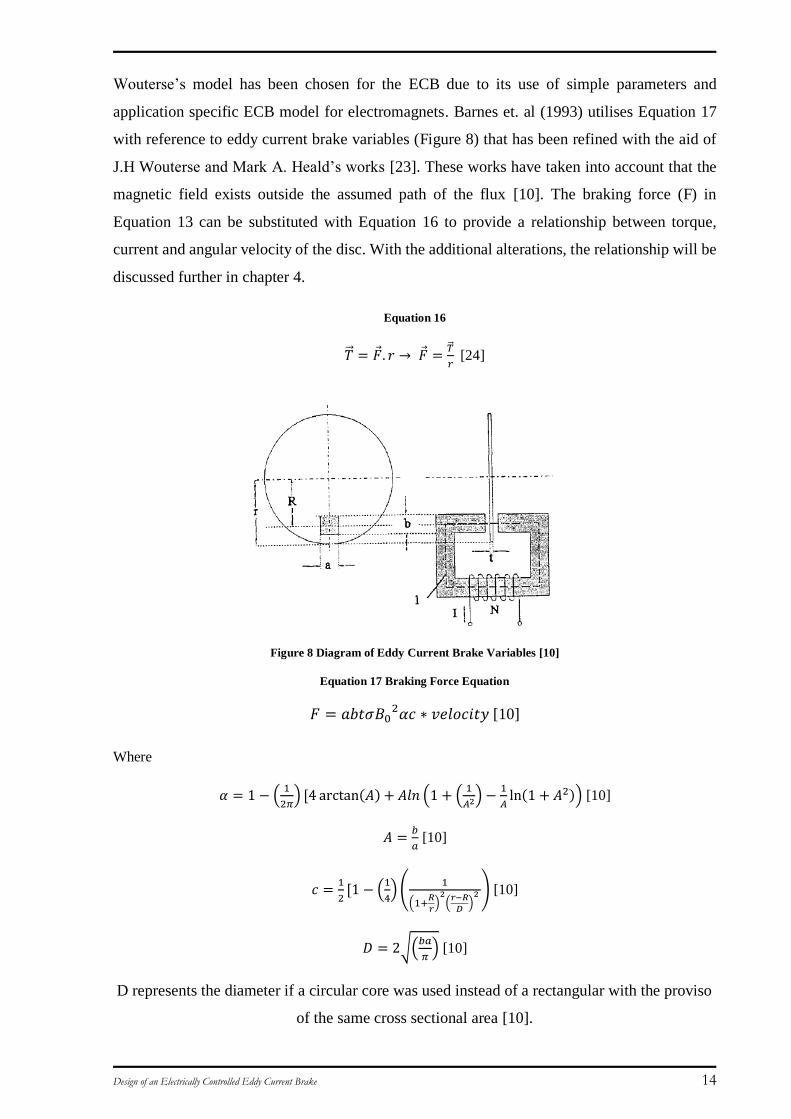
Wouterse’s model has been chosen for the ECB due to its use of simple parameters and
application specific ECB model for electromagnets. Barnes et. al (1993) utilises Equation 17
with reference to eddy current brake variables (Figure 8) that has been refined with the aid of
J.H Wouterse and Mark A. Heald’s works [23]. These works have taken into account that the
magnetic field exists outside the assumed path of the flux [10]. The braking force (F) in
Equation 13 can be substituted with Equation 16 to provide a relationship between torque,
current and angular velocity of the disc. With the additional alterations, the relationship will be
discussed further in chapter 4.
Equation 16
�⃗� = 𝐹 . 𝑟 → 𝐹 =�⃗�
𝑟 [24]
Figure 8 Diagram of Eddy Current Brake Variables [10]
Equation 17 Braking Force Equation
𝐹 = 𝑎𝑏𝑡𝜎𝐵02𝛼𝑐 ∗ 𝑣𝑒𝑙𝑜𝑐𝑖𝑡𝑦 [10]
Where
𝛼 = 1 − (1
2𝜋) [4 arctan(𝐴) + 𝐴𝑙𝑛 (1 + (
1
𝐴2) −1
𝐴ln(1 + 𝐴2)) [10]
𝐴 =𝑏
𝑎 [10]
𝑐 =1
2[1 − (
1
4)(
1
(1+𝑅
𝑟)2(𝑟−𝑅
𝐷)2 ) [10]
𝐷 = 2√(𝑏𝑎
𝜋) [10]
D represents the diameter if a circular core was used instead of a rectangular with the proviso
of the same cross sectional area [10].
Design of an Electrically Controlled Eddy Current Brake 15
2.4 Finite Element Analysis (FEA)
In engineering applications, the state variables of an eddy current can be described with partial
differential equations with other parameters that link the input mechanical power and angular
speed response. This must include the known variables such as conductive disc dimensions and
the air gap distance. However, the non-linear relationships between these variables become
complex and impossible to calculate over numerous iterations and therefore, require another
method other than analytical. Finite Element Analysis (FEA) on the other hand, can solve these
iterative equations and is used today to solve static and dynamic problems including fluid
mechanics and electromagnetics. [25]
In conducting an FEA for an ECB, the following considerations must be made:
Analysis as either Two-Dimensional (2D) or Three-Dimensional (3D)
Method as either transport-term or transient
Boundary conditions
Periodicities and symmetries
Level of approximation of the properties of the material
The difference between a 2D and 3D analysis is that a 3D analysis requires a strong processor
and requires a longer time to simulate. A 2D analysis is easier and quicker than a 3D but is
disadvantaged of not accepting 3D boundary condition parameters, hence approximations must
be made in order to make the model accurate. [26]
The methods which are applicable to ECBs are transport-term and transient methods. The
transport-term method consists of adding a conductivity and velocity term to the analysis. This
is ideal for a simple ECB which does not consist of cooling fins or holes. A transient method
begins with the disc at rest before bringing it to the desired speed. However, it will have to
undergo several trials in order to observe the transients occurring. As mentioned, this method
is time consuming due to the need of computing several trials for every transient that occurs
and the complexity of the equations. [26]
Finite Element Method (FEM) is an accurate way of predicting the model as well as confirming
the behaviour of the eddy current and the interaction of the flux density [27]. However, for train
applications, many journals have also conducted a 3D analysis in order to take into account flux
distribution [27]. In an ECB, there are finite element equations which are used for areas that are
conducting and non-conducting. For non-conducting areas, Equation 18 is used. In conducting
areas such as the eddy current paths, Equation 19 is used. [24]

Design of an Electrically Controlled Eddy Current Brake 16
Equation 18
𝐸 = −𝜕𝐴
𝜕𝑡− ∇. 𝑉 + 𝜔 𝑥 ∇ 𝑥 𝐴 [24]
Equation 19
∇ 𝑥1
𝜇𝑥∇𝑥𝐴 = 𝜎 (−
𝜕𝐴
𝜕𝑡− (𝜔. ∇)𝐴 − (𝐴. ∇)𝜔 − 𝐴𝑥(∇𝑥𝜔)) [24]
Where:
V= scalar electric potential
ω = speed
A = magnetic potential field which is defined along the electrical potential φ [28]
Through a 3D transient magnetic model, the simulation is able to produce the relationship
between torque, speed and current. Not only can that relationship be confirmed through a 3D
analysis, the interaction between the eddy current and conductive disc can also be shown. [24]
Gulbahce’s (2013) journal article titled “A study to determine the excitation current of the
braking torque of a low Eddy Current Brake” states that the conductive material exposed to the
current can be expressed as Equation 20 [24]. Gulbahce (2013) found that as the current varies,
the critical speed remains constant [24]. This agrees with Lentz’s measurements for torque and
speed in Smythe’s journal article mentioned previously.
Equation 20
∇𝑥�⃗� = −𝜕�⃗�
𝜕𝑡 [24]
Gay and Ehsani (2006) states that the use of FEM is to model the properties of the ferromagnetic
material in the brake and therefore, be able to observe the brake’s performance. It is also
mentioned that the ferromagnetic materials that are used for ECBs have the same properties due
to the process of casting [26].
Design of an Electrically Controlled Eddy Current Brake 17
3 Determination of Magnetisation Curve
In order to understand the relationship between the flux density (B) and flux intensity (H) within
a core, the magnetisation curve is determined. This experiment allows for an accurate analysis
of the material’s properties in terms of flux density and field intensity. From this point, the
predicted torque at various speeds can be determined through Matlab to produce Figure 9.
Through this experiment, the saturation point will also be determined which is also known as
the limit of the maximum achievable magnetic flux density in the material [29].
Aim: Determine the Magnetisation Curve
Method:
Firstly, the theoretical number of turns, current and voltage was calculated with the following
equations:
𝐻(𝑡) =𝑁𝑀𝑎𝑖𝑛𝑖𝑀𝑎𝑖𝑛(𝑡)
𝑙𝑐𝑜𝑟𝑒 (i)
𝑉𝑆 = 4.44𝑁𝑀𝑎𝑖𝑛𝐵𝑝𝑘𝐴𝑐𝑜𝑟𝑒𝑓 (ii)
𝐵(𝑡) =1
𝐴𝑐𝑜𝑟𝑒𝑁𝑀𝑎𝑖𝑛∫ 𝑣𝑠𝑒𝑛𝑠𝑒𝑑𝑡 =
1
𝐴𝑐𝑜𝑟𝑒𝑁𝑀𝑎𝑖𝑛𝜆𝑠𝑒𝑛𝑠𝑒(𝑡) (iii)
𝜆𝑠𝑒𝑛𝑠𝑒[𝑘 + 1] = 𝜆𝑠𝑒𝑛𝑠𝑒[𝑘] + 𝑣𝑆𝑒𝑛𝑠𝑒[𝑘]∆𝑡 (iv)
[29]
These equations were solved with Matlab with the known parameters:
f=50Hz
L(core)=0.4791 m
Bpk=2.5T
H(core)=2500At/m
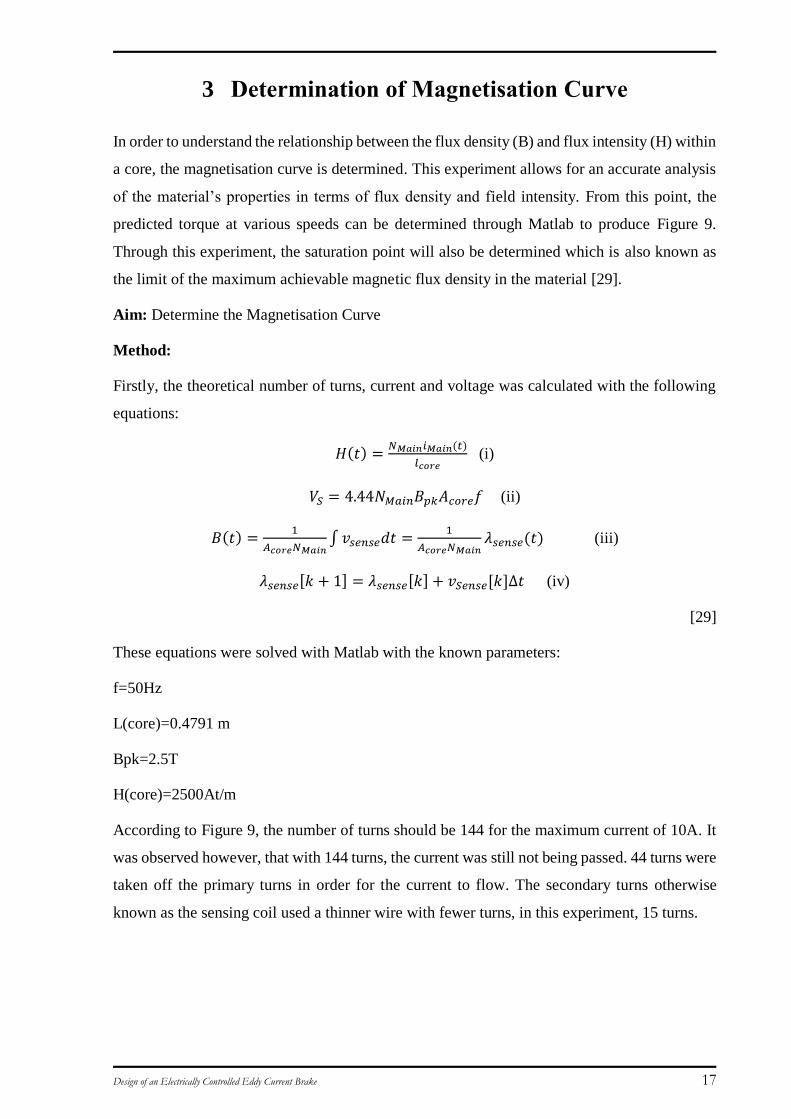
According to Figure 9, the number of turns should be 144 for the maximum current of 10A. It
was observed however, that with 144 turns, the current was still not being passed. 44 turns were
taken off the primary turns in order for the current to flow. The secondary turns otherwise
known as the sensing coil used a thinner wire with fewer turns, in this experiment, 15 turns.
Design of an Electrically Controlled Eddy Current Brake 18
Figure 9 Relationship between voltage, current and number of turns
0 100 200 300 400 500 600 7000
100
200
300
400
500
600
Current
voltage(V
) N
main
(turn
s)
X: 10.01Y: 65
X: 10.01Y: 143.5
Voltage vs. Current
Nmain vs. Current
Design of an Electrically Controlled Eddy Current Brake 19
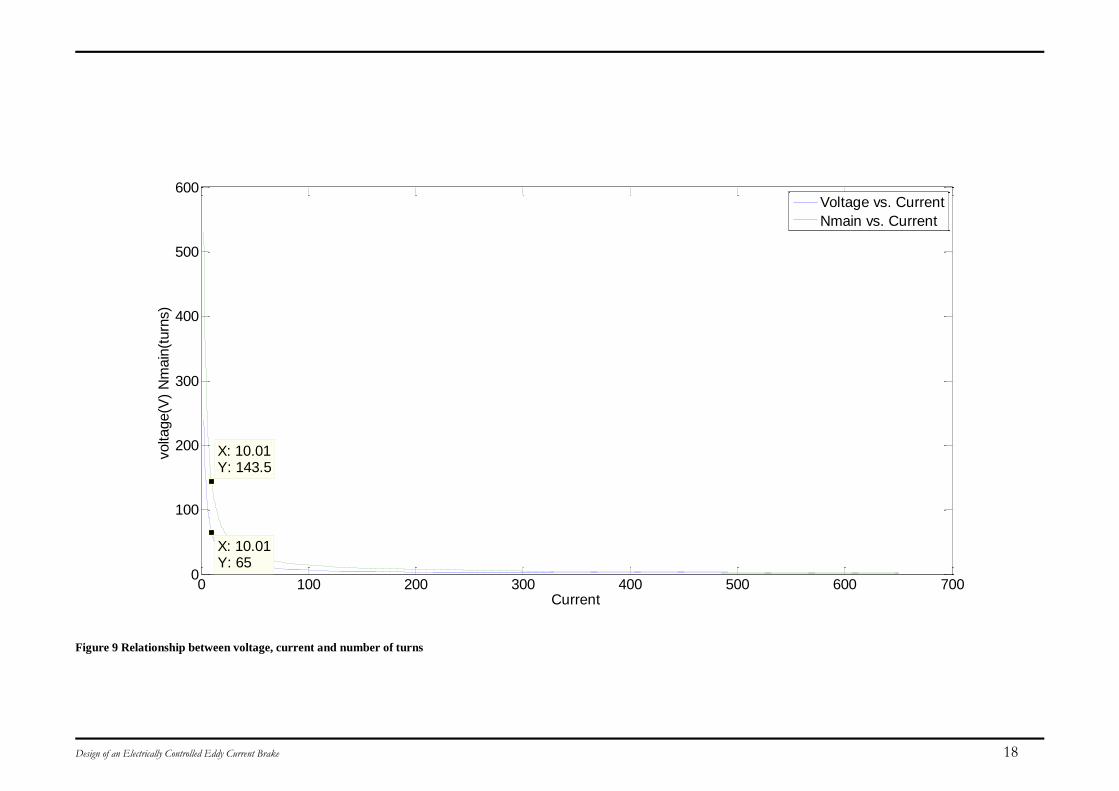
Figure 10 and Figure 11 demonstrates the general setup of the experiment. The range of currents
that were utilised ranged between 0.078A to 10A.
Figure 10 Magnetisation Curve Set up [29]
Figure 11 Experimental set up
The measurements required from the oscilloscope is the current in the primary turns and the
voltage measured in the sensing coil. The sensing coil is used to measure the magnetic flux
density induced by the primary windings [29].
After obtaining the measurements, the DC offsets are required to be removed by calculating the
mean of both signals and subtracting them from their respectful signals. The flux was calculated
via (i). The flux linkage can be determined by using (iii and iv) and removing the DC offset.
The final step is to plot the BH values to obtain the hysteresis curve. The magnetisation curve
is determined by plotting the peak values of B and H.
Design of an Electrically Controlled Eddy Current Brake 20
Results and Discussion:
Current did not flow through the wire initially prior to the removal of 44 turns in the primary.
This may have been due to the incorrect initial values (B and H) which may have not described
the core material accurately. As in the method, Bpk was 2.5T and Hpk was 2500 At/m which
is larger when compared to Figure 15 where the core material actually saturates at 1.9T.
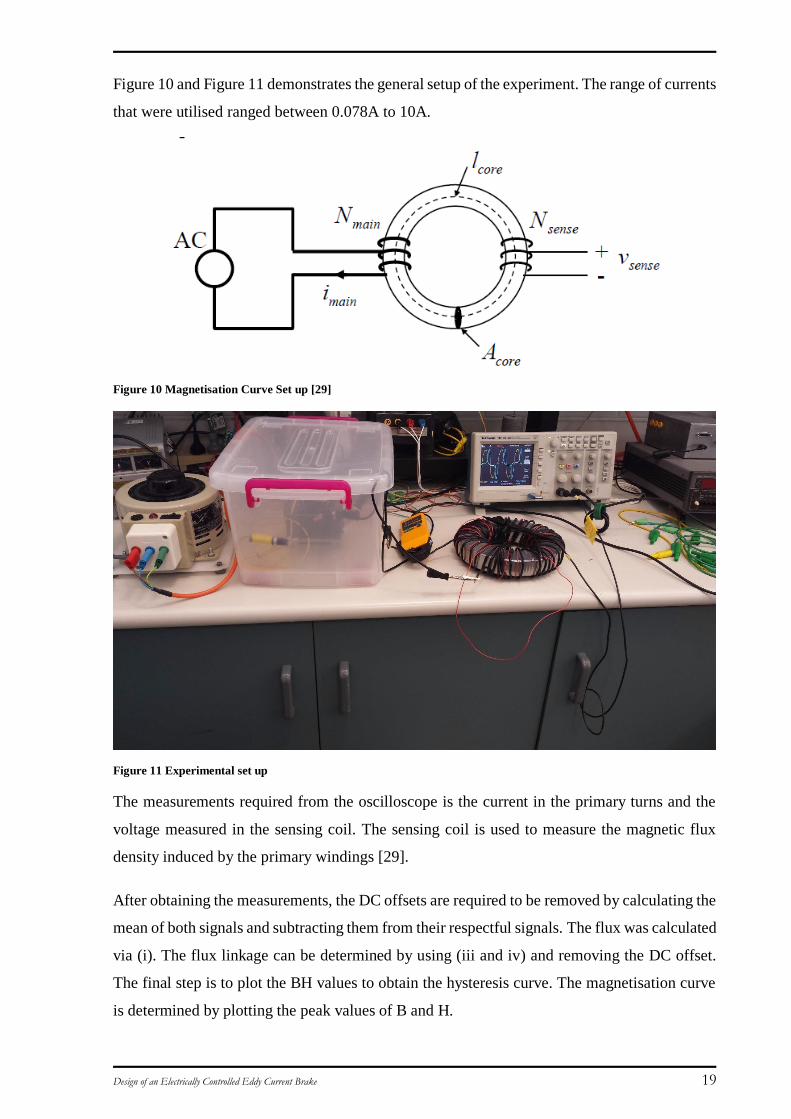
Figure 12 Main coil current vs. sensing voltage
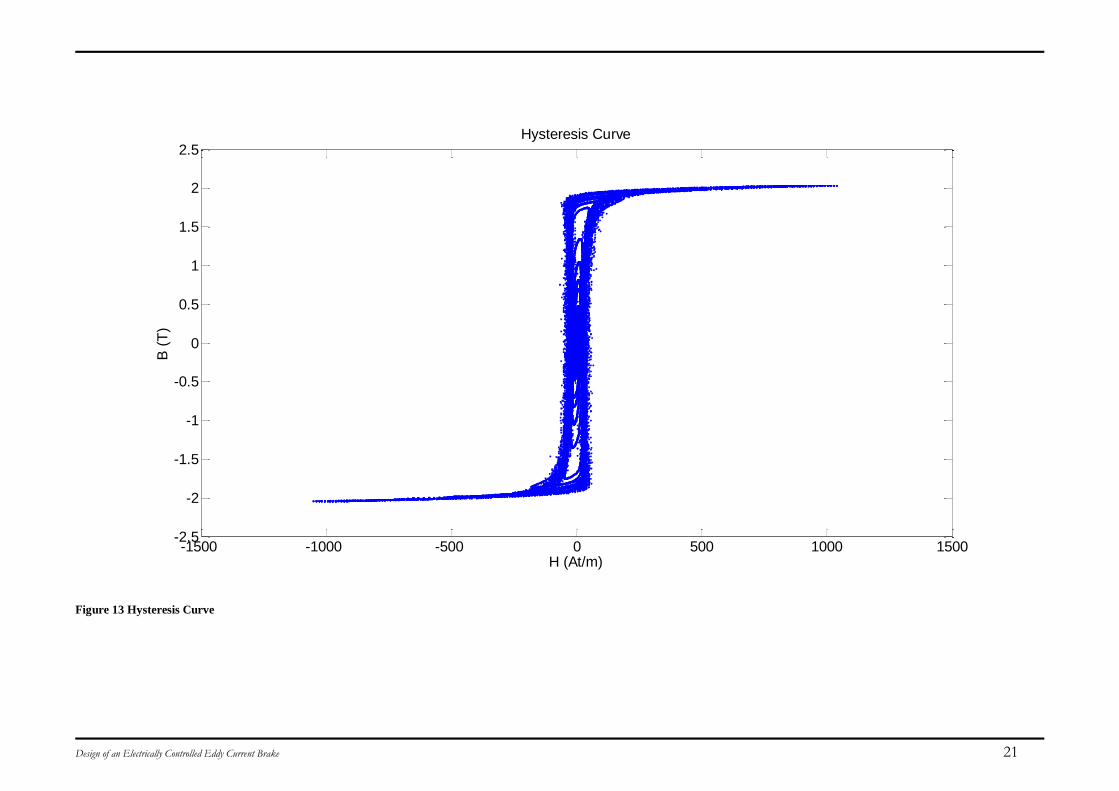
For each current, Figure 12 is produced with different Amplitudes. Figure 13 illustrates all the
hysteresis curves for all the currents tested. According to [29], the loop like behaviour is caused
by the iron losses experienced by the core material and the subsequent areas demonstrates the
energy losses due to eddy currents and hysteresis.
-0.025 -0.02 -0.015 -0.01 -0.005-20
0
20
Vo
lta
ge
(V)
Time (s)
Main Current vs. Sensing Voltage
-0.025 -0.02 -0.015 -0.01 -0.005-20
0
20
Cu
rre
nt
(A)
Voltage
Current
Design of an Electrically Controlled Eddy Current Brake 21
Figure 13 Hysteresis Curve
-1500 -1000 -500 0 500 1000 1500-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5Hysteresis Curve
H (At/m)
B (
T)
Design of an Electrically Controlled Eddy Current Brake 22
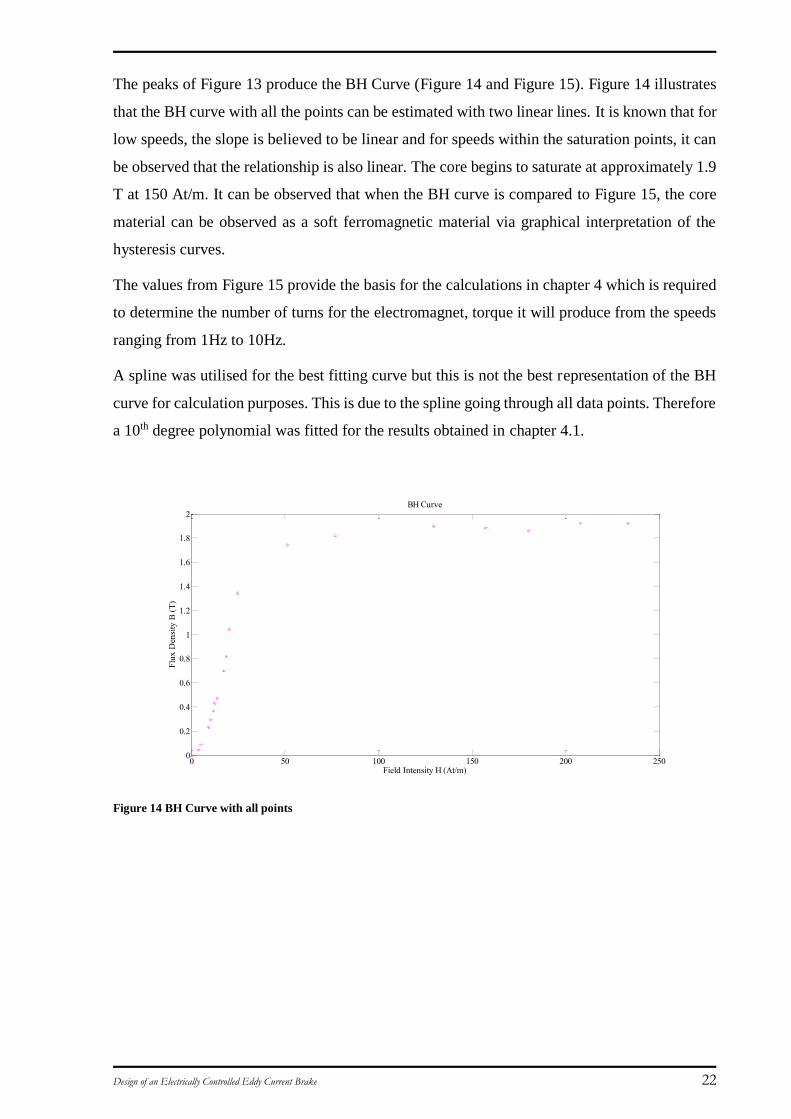
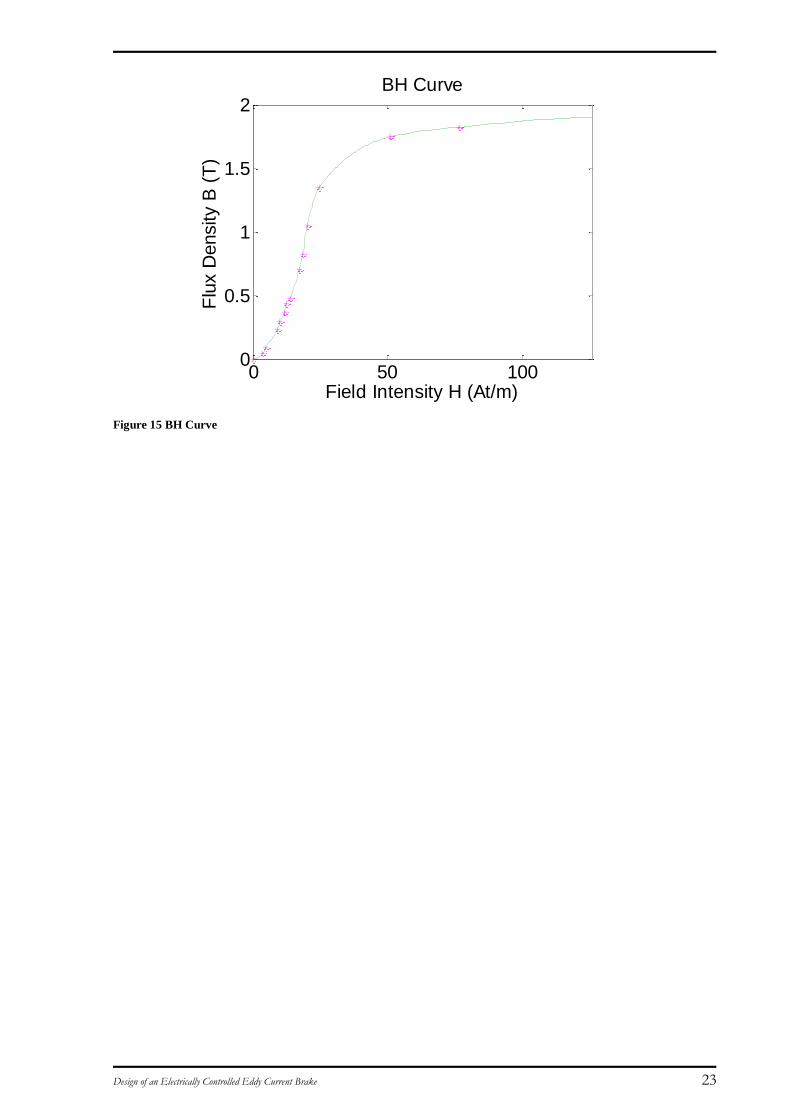
The peaks of Figure 13 produce the BH Curve (Figure 14 and Figure 15). Figure 14 illustrates
that the BH curve with all the points can be estimated with two linear lines. It is known that for
low speeds, the slope is believed to be linear and for speeds within the saturation points, it can
be observed that the relationship is also linear. The core begins to saturate at approximately 1.9
T at 150 At/m. It can be observed that when the BH curve is compared to Figure 15, the core
material can be observed as a soft ferromagnetic material via graphical interpretation of the
hysteresis curves.
The values from Figure 15 provide the basis for the calculations in chapter 4 which is required
to determine the number of turns for the electromagnet, torque it will produce from the speeds
ranging from 1Hz to 10Hz.
A spline was utilised for the best fitting curve but this is not the best representation of the BH
curve for calculation purposes. This is due to the spline going through all data points. Therefore
a 10th degree polynomial was fitted for the results obtained in chapter 4.1.
Figure 14 BH Curve with all points
0 50 100 150 200 2500
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2BH Curve
Field Intensity H (At/m)
Flu
x D
ensi
ty B
(T
)
Design of an Electrically Controlled Eddy Current Brake 23
Figure 15 BH Curve
0 50 1000
0.5
1
1.5
2BH Curve
Field Intensity H (At/m)
Flu
x D
ensity B
(T
)
Design of an Electrically Controlled Eddy Current Brake 24
4 Final Design
The final design of the ECB has many components that require consideration. These consist of:
Target torque
Speed required
Current and voltage required
Number of turns of copper wire
Parameters of disc (material, diameter and disc thickness)
Configuration of coils
Limitations of models and equipment
Diameter of wire
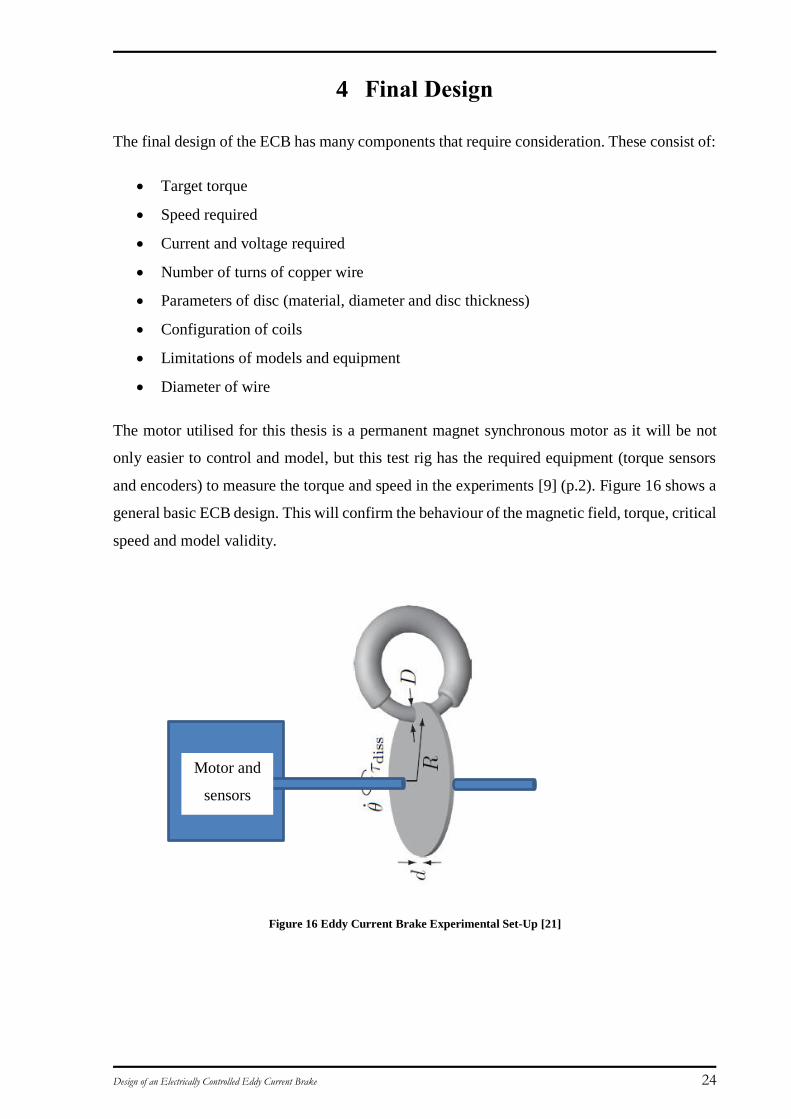
The motor utilised for this thesis is a permanent magnet synchronous motor as it will be not
only easier to control and model, but this test rig has the required equipment (torque sensors
and encoders) to measure the torque and speed in the experiments [9] (p.2). Figure 16 shows a
general basic ECB design. This will confirm the behaviour of the magnetic field, torque, critical
speed and model validity.
Figure 16 Eddy Current Brake Experimental Set-Up [21]
Motor and
sensors

Design of an Electrically Controlled Eddy Current Brake 25
4.1 Calculations:
The calculation for the corresponding flux density used in Wouterse’s model are from the
magnetisation curve determined in Chapter 3. As mentioned in 1.2, this electromagnet must
achieve a torque of at least 0.3Nm and a maximum speed of 10Hz.
In conducting calculations, the value of B and its corresponding H value were initially used to
determine the parameters of the ECB and torque using Matlab. Equations from Sen (1997) were
used for this procedure [5]. The equations used are as follows:
𝐵 = 𝜇0𝜇𝑟𝐻
𝐹𝑐 = 𝐻𝑐𝑙𝑐
𝐹𝑔 = 𝐻𝑔𝑙𝑔 → 𝐹𝑔 = 𝐻𝑐𝑙𝑔 (if air gap is relatively small in comparison to the mean core length)
𝐹𝑇 = 𝐹𝑐 + 𝐹𝑔
𝐹𝑇 = 𝑁𝑖 → 𝑖 =𝐹𝑇
𝑁
[5]
The above equations were utilised to determine the current required to force the flux through
the electromagnet. There are many alternatives that were considered for completing the flux
path. These consist of:
a) Using a set-up similar to Appendix C: Proposed Design. By having a backing plate’s
thickness greater than the rod’s diameter, the reluctance for the backing plate can be
neglected in comparison to the rod’s reluctance. An FEA analysis can confirm the
behaviour of magnetic flux.
b) Using a toroidal core where a slit is required to be cut for the air gap
c) Using a square core with similar actions required from b)
This thesis uses a toroidal core as observed in Figure 16 and as mentioned in chapter 1.2, an
Axial Flux PMSM motor to provide the load.
4.1.1 Corresponding Flux Density used in Torque Calculations
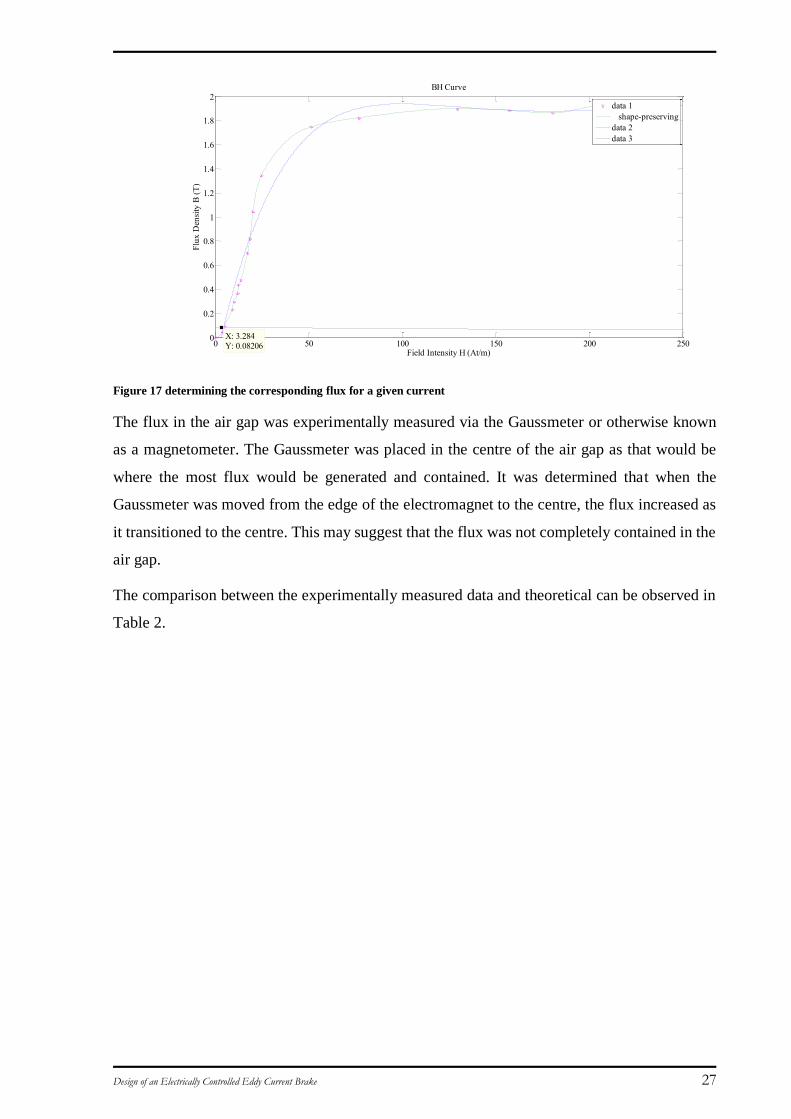
This resulting load line and corresponding flux density for 0.5A is illustrated in Figure 17. It
was observed that for currents below 0.5A, the curve fitting methods provide different results.

Design of an Electrically Controlled Eddy Current Brake 26
For instance, the green curve is a shape preserving curve. This is closer to the BH curve
observed in Figure 3. The blue curve is fitted by a 10th degree polynomial. The issue with using
polynomials is that it does not necessary intersect at the origin.
The corresponding flux density utilised for a given current was calculated by determining the
load line. The parameters include:
𝑁𝑖 = 𝐻𝑔𝐿𝑔 + 𝐻𝑐𝐿𝐶 =𝐵𝑔
𝜇0𝐿𝑔 + 𝐻𝑐𝐿𝑐
Where:
Hg = field intensity of air gap (At/m),
Hc = field intensity of core (At/m),
µ0 = permeability of free space (4πe-7 h/m),
Lc = mean length of core (m),
Lg = length of air gap (m)
𝐵𝑔 = 𝐵𝑐 = −𝜇0 (𝐿𝑐
𝐿𝑔)𝐻𝑐 +
𝑁𝑖𝜇0
𝐿𝑔
Where:
Bg = Bc = flux density of core/air gap (assuming no leakage flux)
This is in the form of the linear equation y=mx+c, this is known as the load line and is plotted
on the BH Curve.
𝑚 = 𝐻𝑐 = −𝜇0 (𝐿𝑐
𝐿𝑔)
The B intersection point is:
𝑐 = 𝐵𝑔 =𝑁𝑖𝜇0
𝐿𝑔
[5]
The resulting load line is observed in Figure 17 for 0.5A. The flux density obtained for 0.5A is
0.08206 T.
Design of an Electrically Controlled Eddy Current Brake 27
Figure 17 determining the corresponding flux for a given current
The flux in the air gap was experimentally measured via the Gaussmeter or otherwise known
as a magnetometer. The Gaussmeter was placed in the centre of the air gap as that would be
where the most flux would be generated and contained. It was determined that when the
Gaussmeter was moved from the edge of the electromagnet to the centre, the flux increased as
it transitioned to the centre. This may suggest that the flux was not completely contained in the
air gap.
The comparison between the experimentally measured data and theoretical can be observed in
Table 2.
0 50 100 150 200 2500
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
BH Curve
Field Intensity H (At/m)
Flu
x D
ensi
ty B
(T
)
X: 3.284Y: 0.08206
data 1
shape-preserving
data 2
data 3

Design of an Electrically Controlled Eddy Current Brake 28
Table 2 Comparison of Flux Density Values
Current 0.1 0.2 0.3 0.4 0.5 1 2 3 4 5
1st Linear 0.01636 0.03282 0.04928 0.06578 0.08231 0.1646 0.3292 0.4938 0.6584 0.8231
Spline 0.01623 0.03266 0.04909 0.06558 0.08198 0.1641 0.3286 0.4929 0.6572 0.8223
10th Order Polynomial 0.0162 0.03263 0.04909 0.06552 0.08198 0.164 0.3286 0.4929 0.6578 0.8214
% diff 0.988% 0.582% 0.387% 0.397% 0.403% 0.366% 0.183% 0.183% 0.091% 0.207%
Experimentally measured trial 1
0.01682 0.03344 0.04918 0.06708 0.08399 0.161163 0.32 0.4726 0.5352 0.56255
Experimentally measured trial 2
0.01683 0.03343 0.04918 0.06708 0.0839 0.169427 0.336133 0.499266667 0.571467 0.6062
Average between experiment data 0.01682 0.03344 0.04918 0.06708 0.083945 0.165295 0.328067 0.485933333 0.553333 0.584375
% diff (between experiment only) 0.059% 0.030% 0.000% 0.000% 0.107% 4.877% 4.800% 5.341% 6.346% 7.201%
%diff (experiment and theory) 3.686% 2.422% 0.183% 2.326% 2.393% 1.760% 2.688% 4.295% 22.907% 46.014%
Design of an Electrically Controlled Eddy Current Brake 29
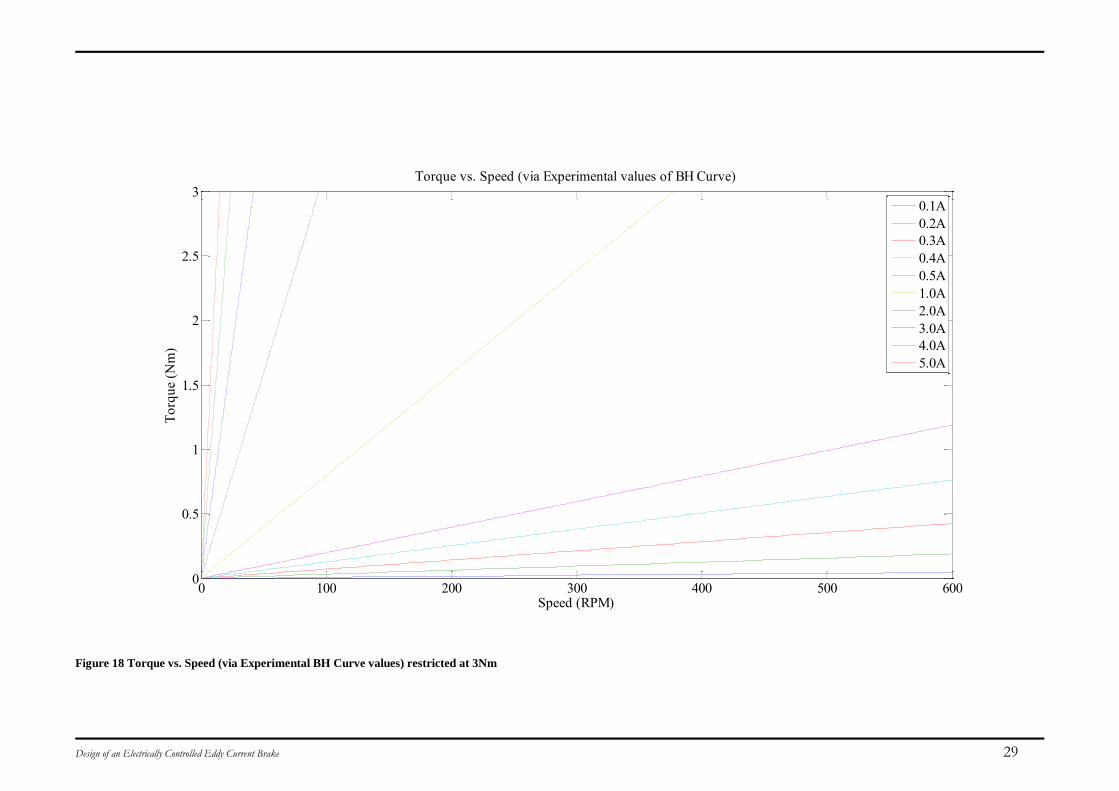
Figure 18 Torque vs. Speed (via Experimental BH Curve values) restricted at 3Nm
0 100 200 300 400 500 6000
0.5
1
1.5
2
2.5
3Torque vs. Speed (via Experimental values of BH Curve)
Speed (RPM)
To
rqu
e (N
m)
0.1A
0.2A
0.3A
0.4A
0.5A
1.0A
2.0A
3.0A
4.0A
5.0A

Design of an Electrically Controlled Eddy Current Brake 30
Figure 18 demonstrates the theoretical relationship between torque, speed and current. It
exhibits that for a given current, certain torques and speeds can be achieved. Each line in Figure
18 represents a current with the top line representing the highest current, 5A. It can be observed
that for a given current, the corresponding flux determined earlier will in turn affect the torque
obtained at various speeds. The experimental limitations will affect the achievable torques as
the highest current (~5A) exceeds the 2.5Nm limit of the motor and achieves less than 1Hz at
lower speeds. The disadvantage of an ECB is that as the speed of the disc decreases, so does
the EMF produced by the applied current. Therefore, it will not be an effective brake at very
low speeds.
4.2 Critical Speed
The critical speed has been determined by using the characteristic velocity equation utilised by
Gosline et. al (2006). Provided that the aluminium disc is an aluminium alloy 6061 with
conductivity of 2.72*107 S/m, given that the thickness of the disc (d) is 0.005m, the critical
velocity becomes:
Equation 21: Critical velocity
𝑉𝑐 =2
𝜎𝜇0𝑑=
2
(2.72 ∗ 107) ∗ (4𝜋 ∗ 10−7) ∗ 0.005= 11.70 𝑚𝑠−1
Using the relationship between velocity and angular velocity, ω=2πf. The critical speed would
then become:
Equation 22
𝛚 =𝐯
𝐫→ 𝒇 =
𝒗
𝟐𝝅𝒓∗ 𝟔𝟎 =
𝟏𝟏.𝟕𝟎
𝟐∗𝝅∗𝟎.𝟎𝟗𝟕𝟓∗ 𝟔𝟎 = 𝟏𝟏𝟒𝟔. 𝟏𝟖 𝑹𝑷𝑴
Where r is the distance the pole is located from the centre.
The pole located at 97.5mm from the centre of the disc provides a critical speed ω, of
approximately 1146 RPM. As the maximum experimental speed is 600 RPM, the linear
relationship exists as this speed falls significantly below the critical velocity determined.
According to Gosline et. al (2006), this value is approximate with an accuracy between 10-
20%[18]. Gosline et al (2006) used a copper disc in the experiments but the conductivity of
copper is almost double the conductivity of aluminium [30]. It can be said that if the thickness
of the disc (d) was constant, the critical velocity is indirectly proportional to the conductivity
of a material.
Design of an Electrically Controlled Eddy Current Brake 31
4.3 Design trade-offs
There are a number of design trade-offs associated with this ECB design. They occur in the
configuration of the coils (if there are multiple coils) as number of turns affects the induced
current.
The dimensions of the disc, such as its thickness and diameter, must also be considered. It has
been observed that the thicker the disc is, the better its deceleration on two different aluminium
discs. The wire sizes required for the current in the coils also affects the design parameters. This
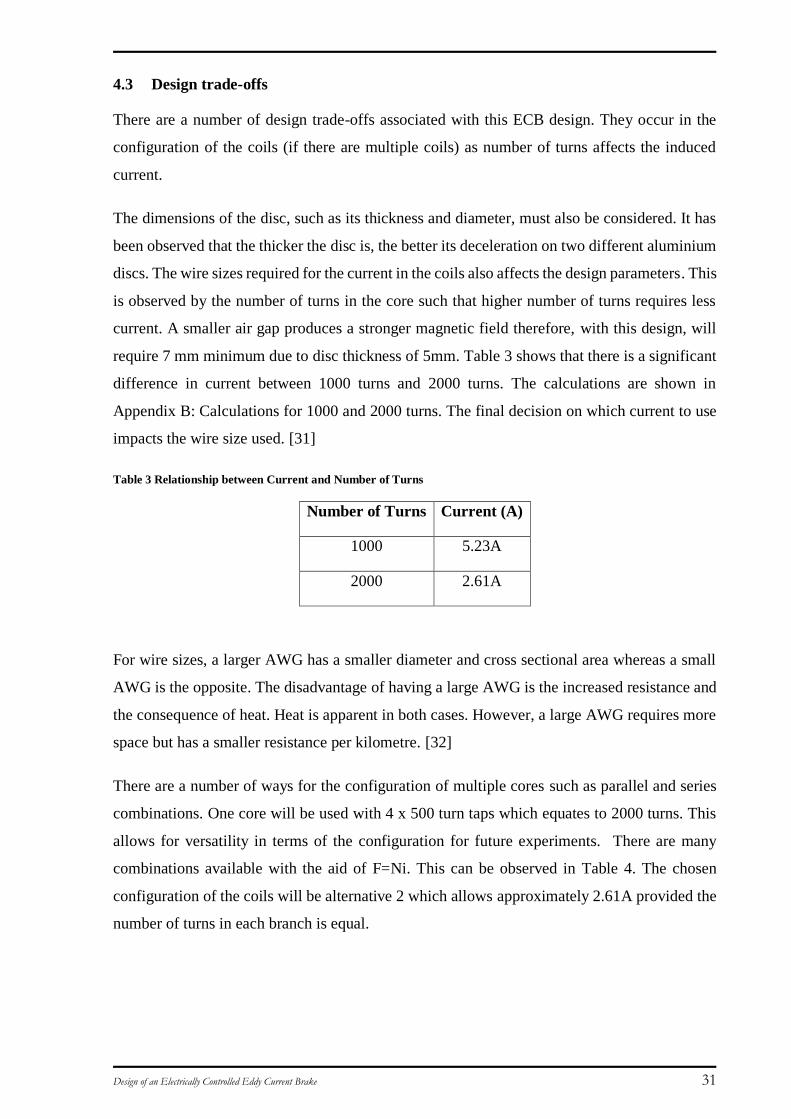
is observed by the number of turns in the core such that higher number of turns requires less
current. A smaller air gap produces a stronger magnetic field therefore, with this design, will
require 7 mm minimum due to disc thickness of 5mm. Table 3 shows that there is a significant
difference in current between 1000 turns and 2000 turns. The calculations are shown in
Appendix B: Calculations for 1000 and 2000 turns. The final decision on which current to use
impacts the wire size used. [31]
Table 3 Relationship between Current and Number of Turns
Number of Turns Current (A)
1000 5.23A
2000 2.61A
For wire sizes, a larger AWG has a smaller diameter and cross sectional area whereas a small
AWG is the opposite. The disadvantage of having a large AWG is the increased resistance and
the consequence of heat. Heat is apparent in both cases. However, a large AWG requires more
space but has a smaller resistance per kilometre. [32]
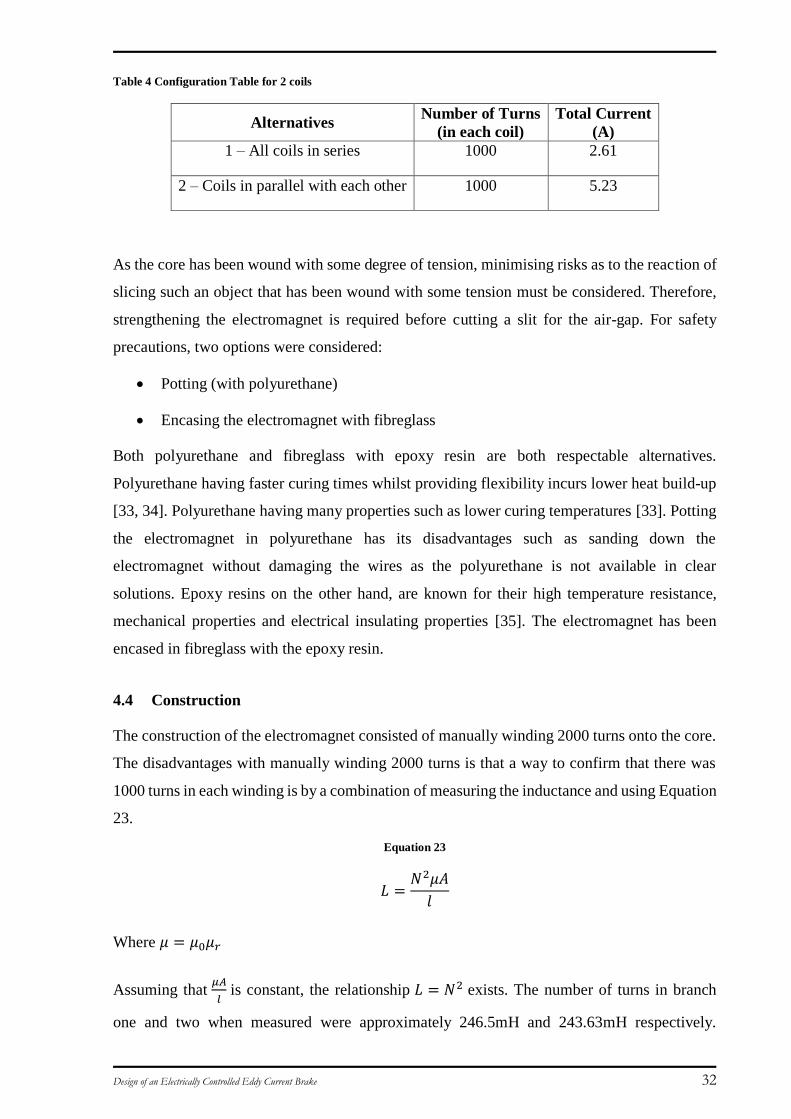
There are a number of ways for the configuration of multiple cores such as parallel and series
combinations. One core will be used with 4 x 500 turn taps which equates to 2000 turns. This
allows for versatility in terms of the configuration for future experiments. There are many
combinations available with the aid of F=Ni. This can be observed in Table 4. The chosen
configuration of the coils will be alternative 2 which allows approximately 2.61A provided the
number of turns in each branch is equal.
Design of an Electrically Controlled Eddy Current Brake 32
Table 4 Configuration Table for 2 coils
Alternatives Number of Turns
(in each coil)
Total Current
(A)
1 – All coils in series 1000 2.61
2 – Coils in parallel with each other 1000 5.23
As the core has been wound with some degree of tension, minimising risks as to the reaction of
slicing such an object that has been wound with some tension must be considered. Therefore,
strengthening the electromagnet is required before cutting a slit for the air-gap. For safety
precautions, two options were considered:
Potting (with polyurethane)
Encasing the electromagnet with fibreglass
Both polyurethane and fibreglass with epoxy resin are both respectable alternatives.
Polyurethane having faster curing times whilst providing flexibility incurs lower heat build-up
[33, 34]. Polyurethane having many properties such as lower curing temperatures [33]. Potting
the electromagnet in polyurethane has its disadvantages such as sanding down the
electromagnet without damaging the wires as the polyurethane is not available in clear
solutions. Epoxy resins on the other hand, are known for their high temperature resistance,
mechanical properties and electrical insulating properties [35]. The electromagnet has been
encased in fibreglass with the epoxy resin.
4.4 Construction
The construction of the electromagnet consisted of manually winding 2000 turns onto the core.
The disadvantages with manually winding 2000 turns is that a way to confirm that there was
1000 turns in each winding is by a combination of measuring the inductance and using Equation
23.
Equation 23
𝐿 =𝑁2𝜇𝐴
𝑙
Where 𝜇 = 𝜇0𝜇𝑟
Assuming that 𝜇𝐴
𝑙 is constant, the relationship 𝐿 = 𝑁2 exists. The number of turns in branch
one and two when measured were approximately 246.5mH and 243.63mH respectively.
Design of an Electrically Controlled Eddy Current Brake 33
Therefore, each branch holds approximately 1047 and 1051 turns respectively. As the two
branches are connected in parallel, the relationship of resistances in parallel cannot be applied.
The relationship becomes:
Equation 24
𝐿𝑛𝑒𝑤 = (2𝑁)2 = 4𝑁2 = 4𝐿
Equation 24 confirms the measured value of inductance when they are connected in parallel.
The value obtained is 452.7mH which confirms the value obtained from substituting L as the
average of the two inductances.
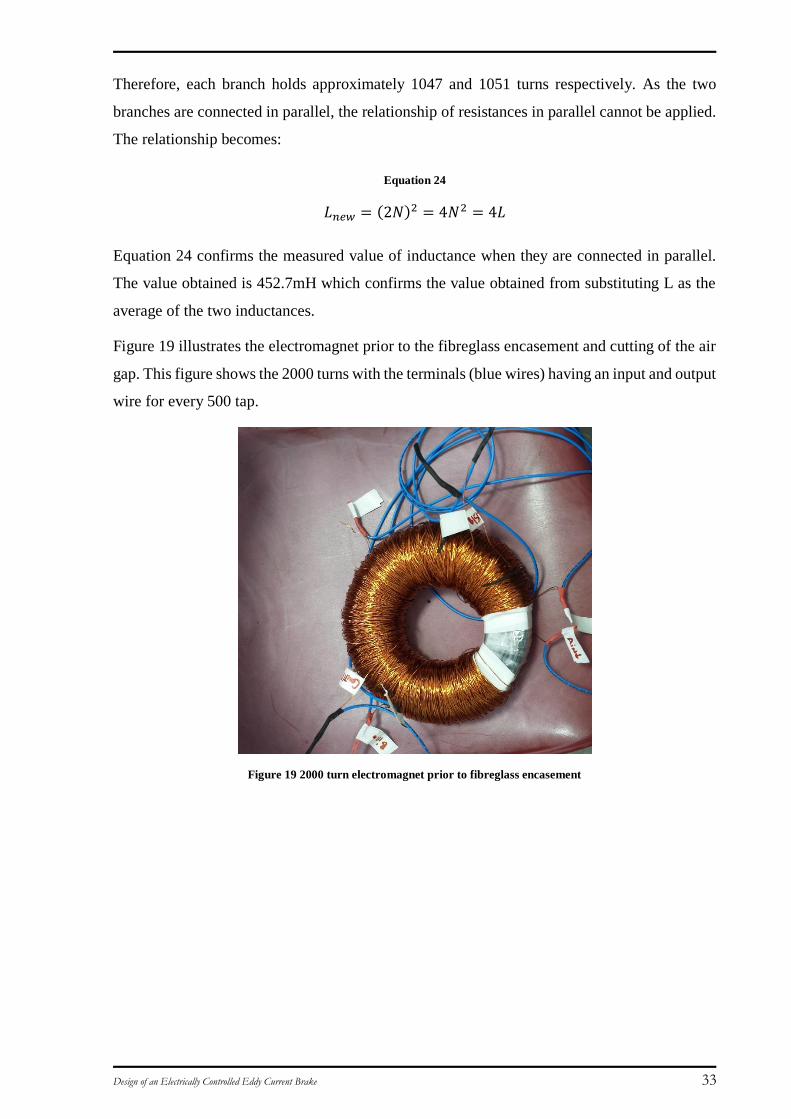
Figure 19 illustrates the electromagnet prior to the fibreglass encasement and cutting of the air
gap. This figure shows the 2000 turns with the terminals (blue wires) having an input and output
wire for every 500 tap.
Figure 19 2000 turn electromagnet prior to fibreglass encasement

Design of an Electrically Controlled Eddy Current Brake 34
Figure 20 Fibreglass encasement
4.5 Experimental Set-up
As Sen (1997) mentioned in chapter 2.1.2, an electromagnetic circuit can be used to conduct
calculations to determine the amount of current required to force the flux through the air gap.
The current design which is illustrated in Figure 21 has simpler calculations in comparison to
the preliminary design with it being a toroidal core with one air gap. The toroidal core is also
available in the market with the exception that the air gap will be required to be cut, therefore
reducing manufacturing costs. The new proposed design which will be presented in Appendix
C: Proposed Design would require the majority of the parts to be manufactured in order to
achieve the ideal ECB geometry parameters. The theoretical calculations for the new proposed
design will have a complicated set of calculations, however FEA analysis should be used for
the proposed design.
The final design consists of the following:
1 x toroidal core
5mm aluminium disc with 200mm diameter
Bearings and plywood
Fibreglass encasement of electromagnet
Wire size to be 0.064mm with 2000 turns. (with 500 taps)
For versatility, 500 turn taps will be included so that the electromagnet can be used with
different configurations.
Design of an Electrically Controlled Eddy Current Brake 35
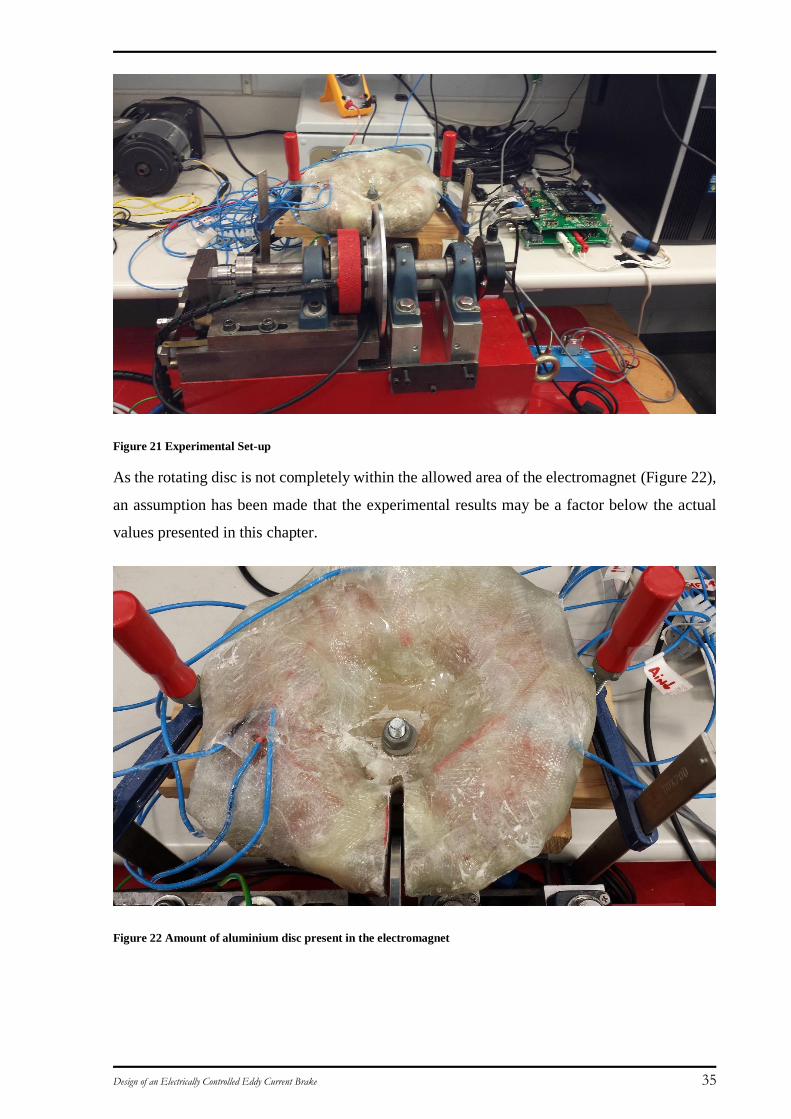
Figure 21 Experimental Set-up
As the rotating disc is not completely within the allowed area of the electromagnet (Figure 22),
an assumption has been made that the experimental results may be a factor below the actual
values presented in this chapter.
Figure 22 Amount of aluminium disc present in the electromagnet
Design of an Electrically Controlled Eddy Current Brake 36
5 Results
Chapter 2.3 discussed the models available for ECBs. It also detailed the critical parameters to
successfully develop an ECB.
This chapter will present the experimental comparison with the theoretical and experimentally
measured flux.
The measurement of the results were via a torque sensor and an encoder which measured the
speed in Hertz. The axial flux PMSM motor provided the load for the ECB.
5.1 Validity of assumptions
Chapters 2.1.2 and 2.3 presented the following assumptions:
For magnetic circuits:
Hysteresis and BH curve presented in chapter 3 is valid and correct
For ECB designs:
Magnetic flux is uniform in the air gap
Conductive disc fits exactly within the air-gap
Relationship between the torque and speed is linear provided it is below the critical
velocity
[16]
5.2 Eddy Current Brake Testing Results
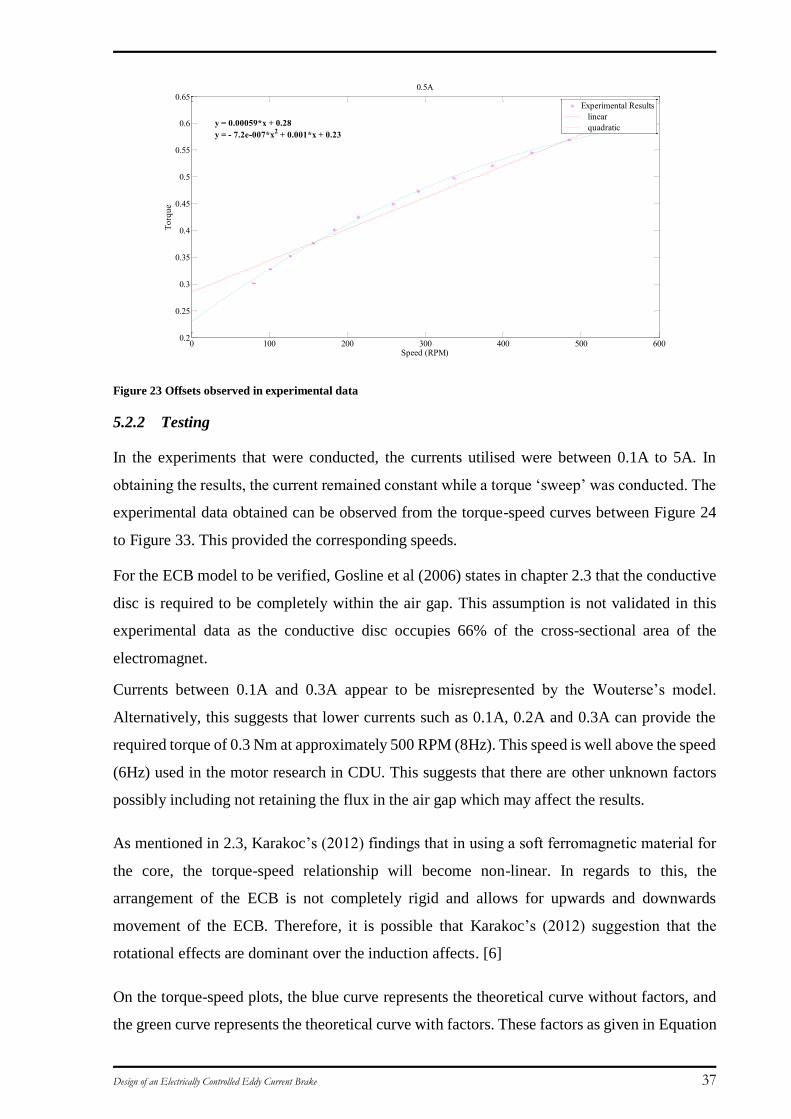
5.2.1 Torque Offset
In all the results that were obtained, there appeared to be an offset. Figure 23 provides an
example of this for a singular dataset. In order to minimise the amount of torque offset, the
torque sensor was reset to zero prior to every trial when data was collected. The torque offset
was determined by using the curve fitting tool in Matlab. The quadratic and linear function were
utilised to determine the offset as the correlation between the points. The quadratic offset value
was used in this case as it was a model where the relationship between the experimental data
had a better correlation. This method was applied to all the sets of torques obtained for the
corresponding currents.
Design of an Electrically Controlled Eddy Current Brake 37
Figure 23 Offsets observed in experimental data
5.2.2 Testing
In the experiments that were conducted, the currents utilised were between 0.1A to 5A. In
obtaining the results, the current remained constant while a torque ‘sweep’ was conducted. The
experimental data obtained can be observed from the torque-speed curves between Figure 24
to Figure 33. This provided the corresponding speeds.
For the ECB model to be verified, Gosline et al (2006) states in chapter 2.3 that the conductive
disc is required to be completely within the air gap. This assumption is not validated in this
experimental data as the conductive disc occupies 66% of the cross-sectional area of the
electromagnet.
Currents between 0.1A and 0.3A appear to be misrepresented by the Wouterse’s model.
Alternatively, this suggests that lower currents such as 0.1A, 0.2A and 0.3A can provide the
required torque of 0.3 Nm at approximately 500 RPM (8Hz). This speed is well above the speed
(6Hz) used in the motor research in CDU. This suggests that there are other unknown factors
possibly including not retaining the flux in the air gap which may affect the results.
As mentioned in 2.3, Karakoc’s (2012) findings that in using a soft ferromagnetic material for
the core, the torque-speed relationship will become non-linear. In regards to this, the
arrangement of the ECB is not completely rigid and allows for upwards and downwards
movement of the ECB. Therefore, it is possible that Karakoc’s (2012) suggestion that the
rotational effects are dominant over the induction affects. [6]
On the torque-speed plots, the blue curve represents the theoretical curve without factors, and
the green curve represents the theoretical curve with factors. These factors as given in Equation
0 100 200 300 400 500 6000.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.650.5A
Speed (RPM)
To
rqu
e
y = 0.00059*x + 0.28
y = - 7.2e-007*x2 + 0.001*x + 0.23
Experimental Results
linear
quadratic
Design of an Electrically Controlled Eddy Current Brake 38
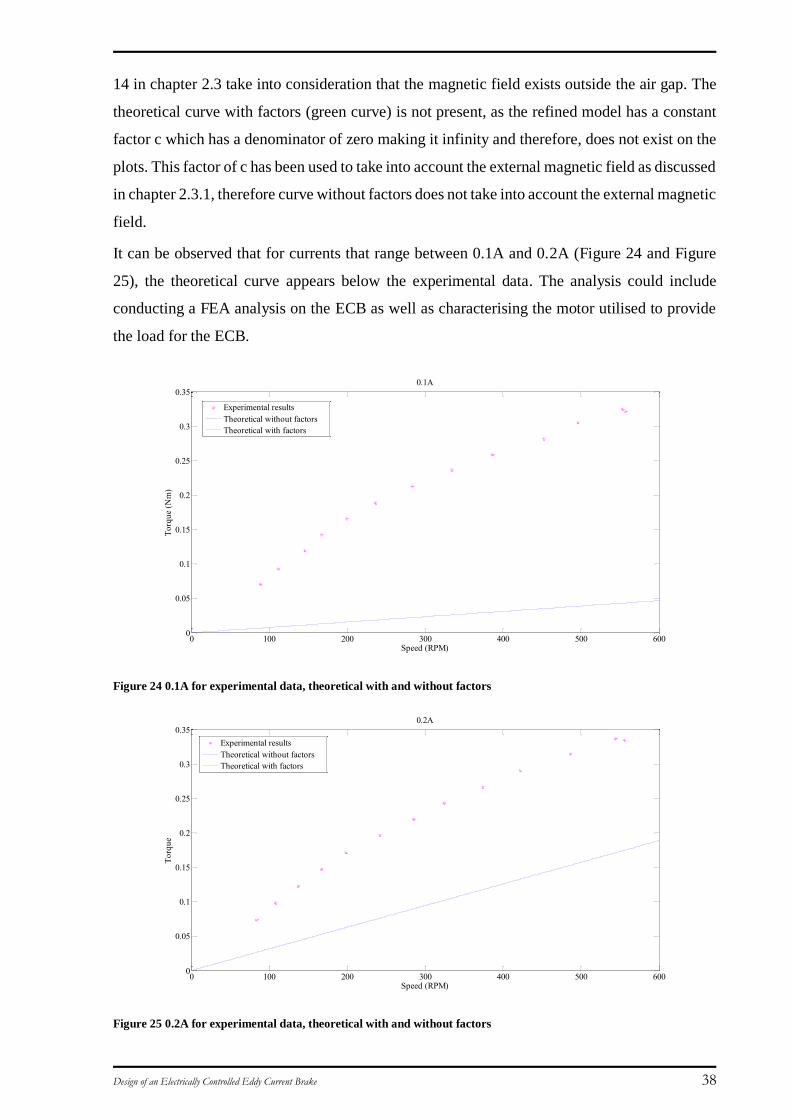
14 in chapter 2.3 take into consideration that the magnetic field exists outside the air gap. The
theoretical curve with factors (green curve) is not present, as the refined model has a constant
factor c which has a denominator of zero making it infinity and therefore, does not exist on the
plots. This factor of c has been used to take into account the external magnetic field as discussed
in chapter 2.3.1, therefore curve without factors does not take into account the external magnetic
field.
It can be observed that for currents that range between 0.1A and 0.2A (Figure 24 and Figure
25), the theoretical curve appears below the experimental data. The analysis could include
conducting a FEA analysis on the ECB as well as characterising the motor utilised to provide
the load for the ECB.
Figure 24 0.1A for experimental data, theoretical with and without factors
Figure 25 0.2A for experimental data, theoretical with and without factors
0 100 200 300 400 500 6000
0.05
0.1
0.15
0.2
0.25
0.3
0.350.1A
Speed (RPM)
To
rqu
e (N
m)
Experimental results
Theoretical without factors
Theoretical with factors
0 100 200 300 400 500 6000
0.05
0.1
0.15
0.2
0.25
0.3
0.350.2A
Speed (RPM)
To
rqu
e
Experimental results
Theoretical without factors
Theoretical with factors
Design of an Electrically Controlled Eddy Current Brake 39
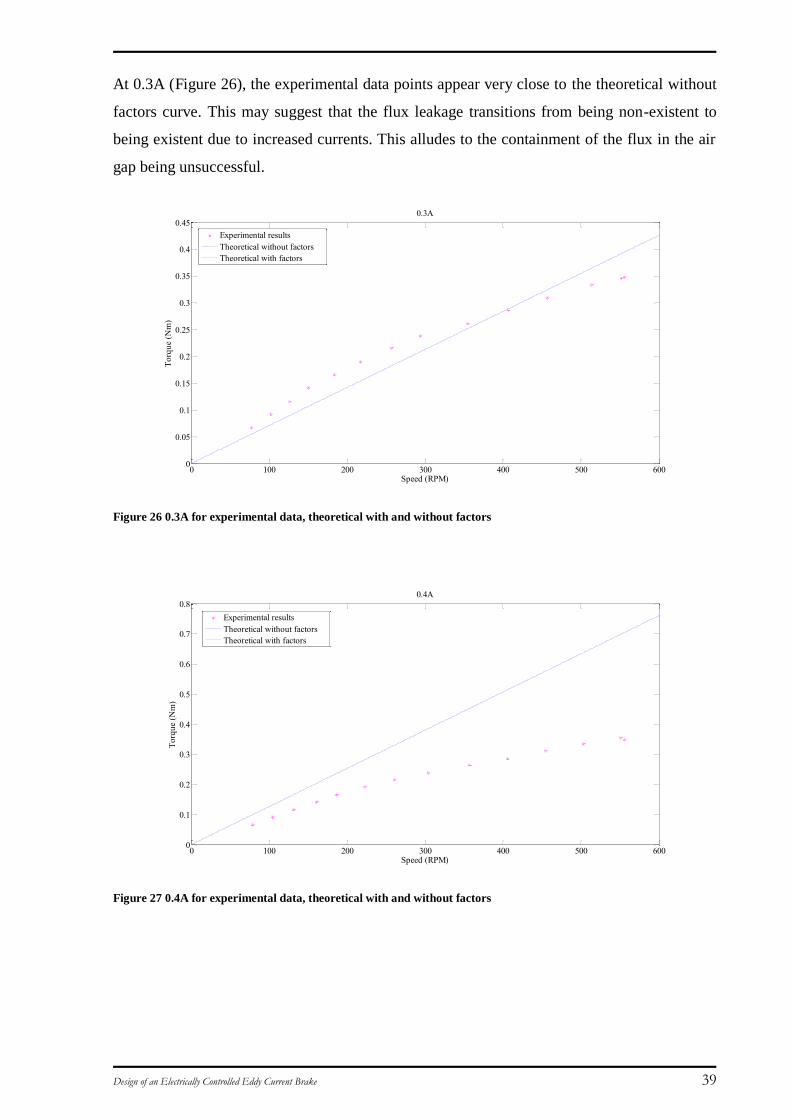
At 0.3A (Figure 26), the experimental data points appear very close to the theoretical without
factors curve. This may suggest that the flux leakage transitions from being non-existent to
being existent due to increased currents. This alludes to the containment of the flux in the air
gap being unsuccessful.
Figure 26 0.3A for experimental data, theoretical with and without factors
Figure 27 0.4A for experimental data, theoretical with and without factors
0 100 200 300 400 500 6000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.450.3A
Speed (RPM)
To
rqu
e (N
m)
Experimental results
Theoretical without factors
Theoretical with factors
0 100 200 300 400 500 6000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.80.4A
Speed (RPM)
To
rqu
e (N
m)
Experimental results
Theoretical without factors
Theoretical with factors
Design of an Electrically Controlled Eddy Current Brake 40
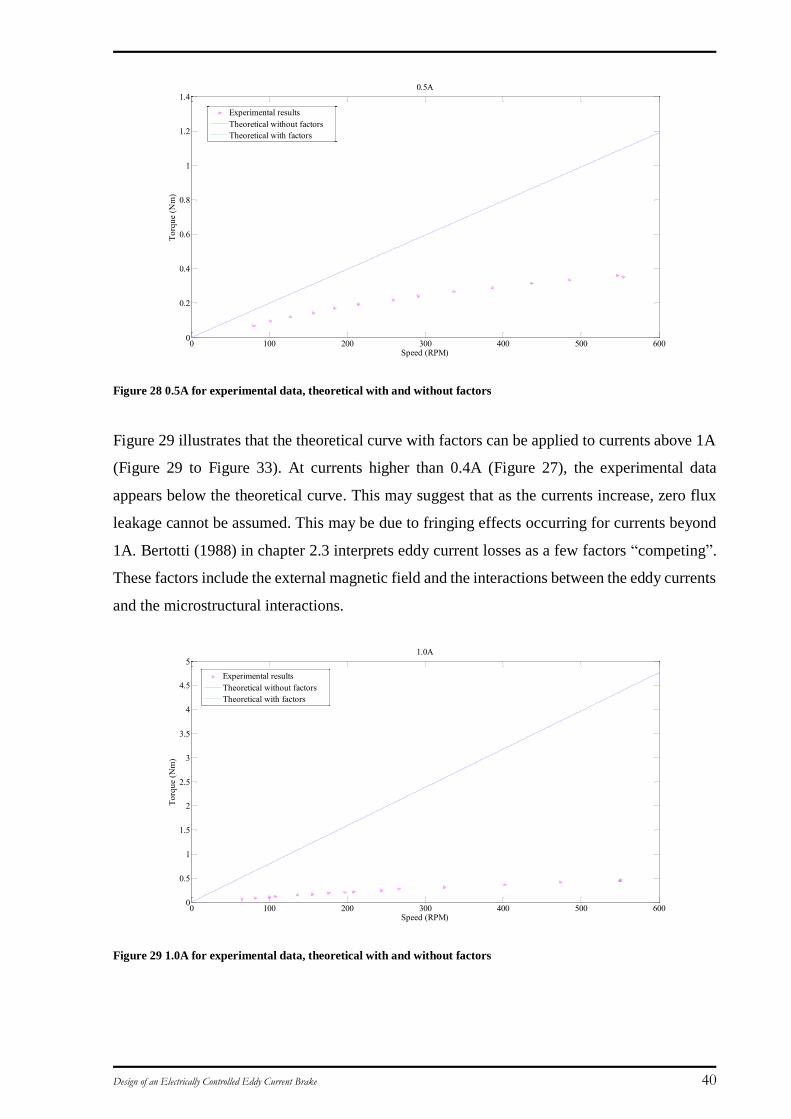
Figure 28 0.5A for experimental data, theoretical with and without factors
Figure 29 illustrates that the theoretical curve with factors can be applied to currents above 1A
(Figure 29 to Figure 33). At currents higher than 0.4A (Figure 27), the experimental data
appears below the theoretical curve. This may suggest that as the currents increase, zero flux
leakage cannot be assumed. This may be due to fringing effects occurring for currents beyond
1A. Bertotti (1988) in chapter 2.3 interprets eddy current losses as a few factors “competing”.
These factors include the external magnetic field and the interactions between the eddy currents
and the microstructural interactions.
Figure 29 1.0A for experimental data, theoretical with and without factors
0 100 200 300 400 500 6000
0.2
0.4
0.6
0.8
1
1.2
1.40.5A
Speed (RPM)
To
rqu
e (N
m)
Experimental results
Theoretical without factors
Theoretical with factors
0 100 200 300 400 500 6000
0.5
1
1.5
2
2.5
3
3.5
4
4.5
51.0A
Speed (RPM)
To
rqu
e (N
m)
Experimental results
Theoretical without factors
Theoretical with factors
Design of an Electrically Controlled Eddy Current Brake 41
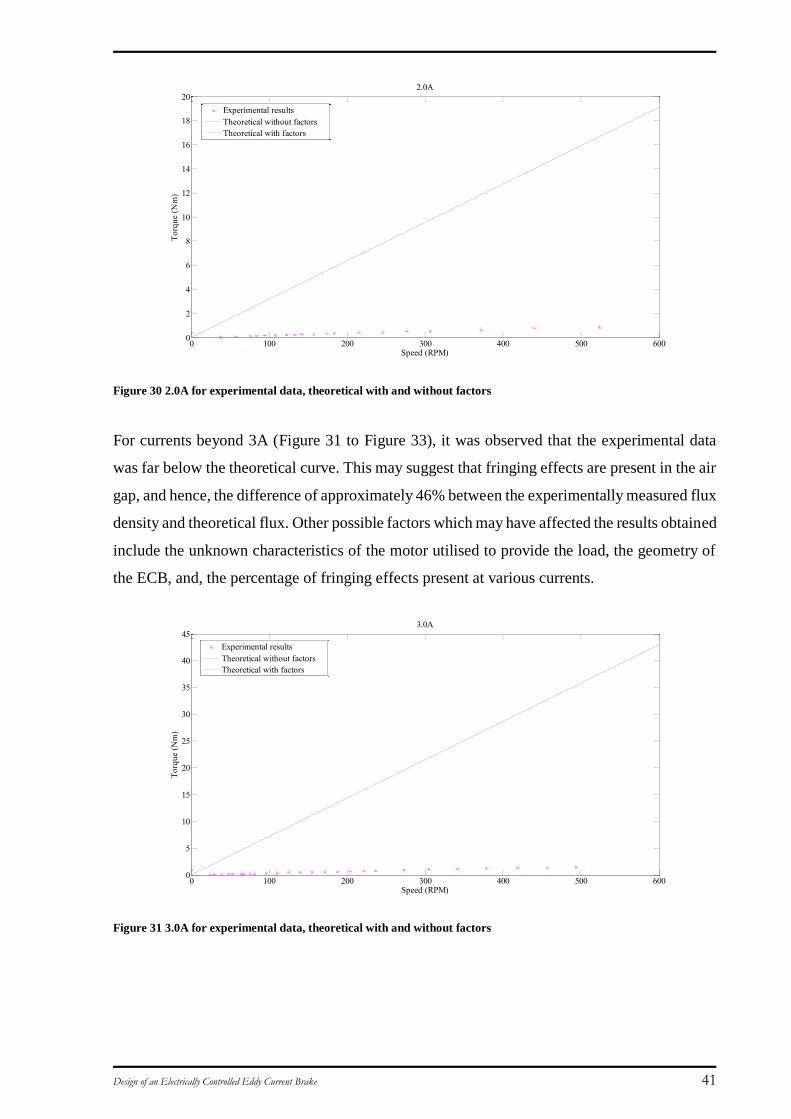
Figure 30 2.0A for experimental data, theoretical with and without factors
For currents beyond 3A (Figure 31 to Figure 33), it was observed that the experimental data
was far below the theoretical curve. This may suggest that fringing effects are present in the air
gap, and hence, the difference of approximately 46% between the experimentally measured flux
density and theoretical flux. Other possible factors which may have affected the results obtained
include the unknown characteristics of the motor utilised to provide the load, the geometry of
the ECB, and, the percentage of fringing effects present at various currents.
Figure 31 3.0A for experimental data, theoretical with and without factors
0 100 200 300 400 500 6000
2
4
6
8
10
12
14
16
18
202.0A
Speed (RPM)
To
rqu
e (N
m)
Experimental results
Theoretical without factors
Theoretical with factors
0 100 200 300 400 500 6000
5
10
15
20
25
30
35
40
453.0A
Speed (RPM)
To
rqu
e (N
m)
Experimental results
Theoretical without factors
Theoretical with factors
Design of an Electrically Controlled Eddy Current Brake 42
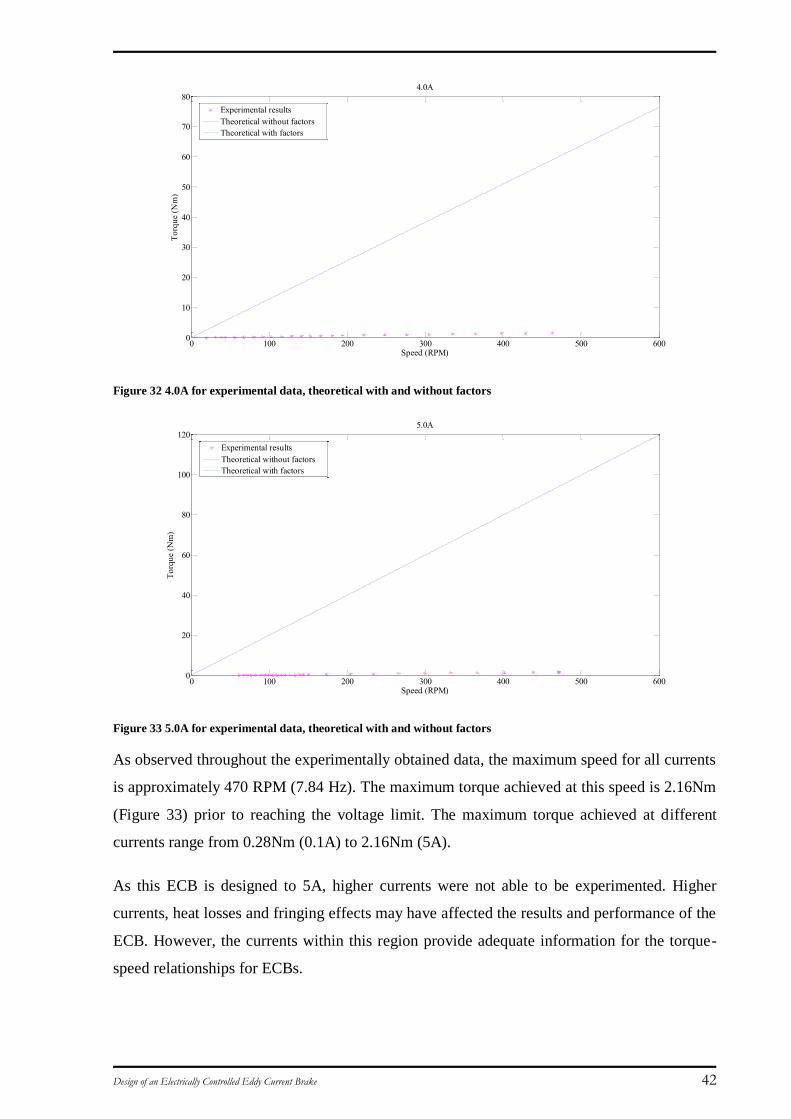
Figure 32 4.0A for experimental data, theoretical with and without factors
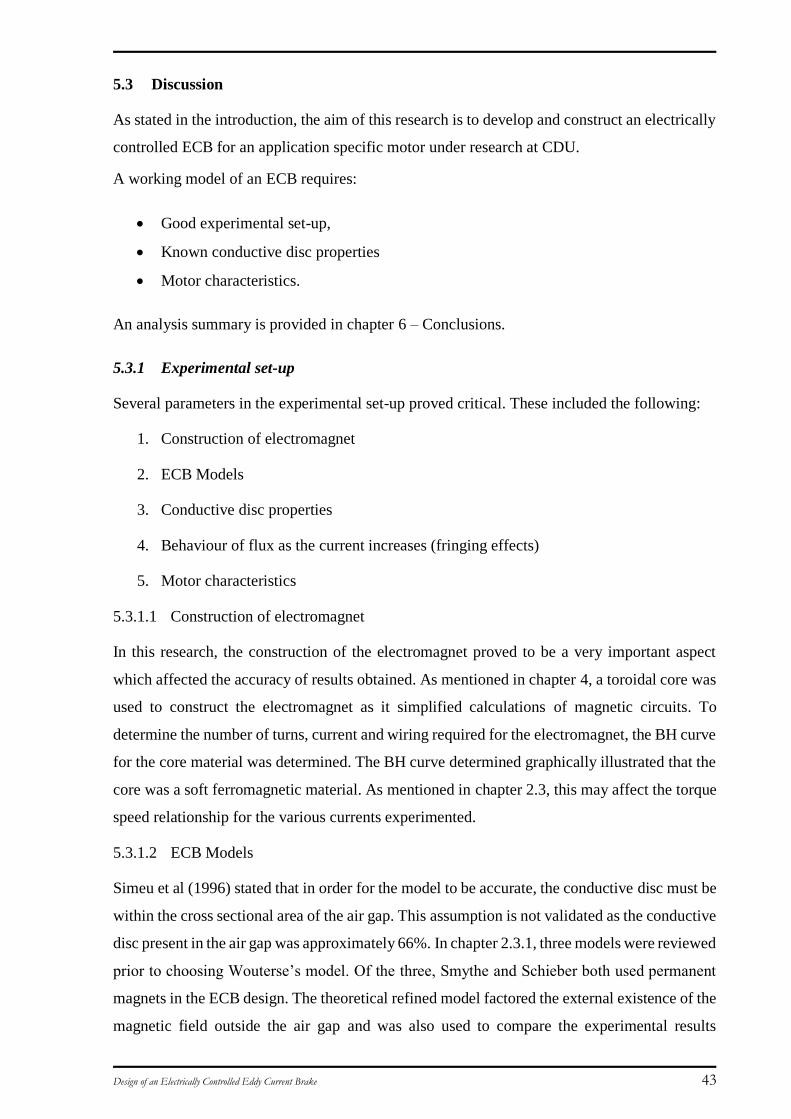
Figure 33 5.0A for experimental data, theoretical with and without factors
As observed throughout the experimentally obtained data, the maximum speed for all currents
is approximately 470 RPM (7.84 Hz). The maximum torque achieved at this speed is 2.16Nm
(Figure 33) prior to reaching the voltage limit. The maximum torque achieved at different
currents range from 0.28Nm (0.1A) to 2.16Nm (5A).
As this ECB is designed to 5A, higher currents were not able to be experimented. Higher
currents, heat losses and fringing effects may have affected the results and performance of the
ECB. However, the currents within this region provide adequate information for the torque-
speed relationships for ECBs.
0 100 200 300 400 500 6000
10
20
30
40
50
60
70
804.0A
Speed (RPM)
To
rqu
e (N
m)
Experimental results
Theoretical without factors
Theoretical with factors
0 100 200 300 400 500 6000
20
40
60
80
100
1205.0A
Speed (RPM)
To
rqu
e (N
m)
Experimental results
Theoretical without factors
Theoretical with factors
Design of an Electrically Controlled Eddy Current Brake 43
5.3 Discussion
As stated in the introduction, the aim of this research is to develop and construct an electrically
controlled ECB for an application specific motor under research at CDU.
A working model of an ECB requires:
Good experimental set-up,
Known conductive disc properties
Motor characteristics.
An analysis summary is provided in chapter 6 – Conclusions.
5.3.1 Experimental set-up
Several parameters in the experimental set-up proved critical. These included the following:
1. Construction of electromagnet
2. ECB Models
3. Conductive disc properties
4. Behaviour of flux as the current increases (fringing effects)
5. Motor characteristics
5.3.1.1 Construction of electromagnet
In this research, the construction of the electromagnet proved to be a very important aspect
which affected the accuracy of results obtained. As mentioned in chapter 4, a toroidal core was
used to construct the electromagnet as it simplified calculations of magnetic circuits. To
determine the number of turns, current and wiring required for the electromagnet, the BH curve
for the core material was determined. The BH curve determined graphically illustrated that the
core was a soft ferromagnetic material. As mentioned in chapter 2.3, this may affect the torque
speed relationship for the various currents experimented.
5.3.1.2 ECB Models
Simeu et al (1996) stated that in order for the model to be accurate, the conductive disc must be
within the cross sectional area of the air gap. This assumption is not validated as the conductive
disc present in the air gap was approximately 66%. In chapter 2.3.1, three models were reviewed
prior to choosing Wouterse’s model. Of the three, Smythe and Schieber both used permanent
magnets in the ECB design. The theoretical refined model factored the external existence of the
magnetic field outside the air gap and was also used to compare the experimental results
Design of an Electrically Controlled Eddy Current Brake 44
obtained. Ensuring the parameters are correct and similar to the primary conditions, the ECB
models and the experimental data should have similarities.
The aim of this thesis was to design an ECB for the test motor currently under research. The
conductive disc however, did not fully occupy the cross sectional area of the air gap. In an ideal
scenario, if the disc had a radius of 150mm, the experimental data may have provided
comparable to the theoretical curves. However, due to unknown factors being present during
experimenting, the relationship between the experimental results and the theoretical curves
cannot be validated.
5.3.1.3 Conductive disc properties
A factor in the ECB models that remains constant in the torque equation is the conductivity of
the conductive disc. This was an unknown parameter. Aluminium 6061 was assumption that
was made for this calculation. As observed in Equation 17, as the conductivity increases, the
torque increases.
Other factors that affect the torque speed curve include the thickness of the disc, the radius of
the conductive disc and the radius at which the pole is from the centre of the conductive disc.
5.3.1.4 Behaviour of Flux
The importance of the flux behaviour is crucial in this system. From the Table 2, it can be
observed that as the current increases, the percentage difference is approximately 4% for
currents up to 3A. The remainder of currents (4A and 5A) provide inconclusive results where
the percentage difference ranges from 23% to 46% respectively. As illustrated in Figure 24 to
Figure 33, due to factors such as the unknown behaviour of flux, fringing effects may be present
at higher currents. The percentage occurring is unknown.
The majority of the flux densities measured experimentally were relatively close. As mentioned
in chapter 2.1.2, Alfons et al (2009) and Sen (1997) demonstrated the effects of the air gap on
the BH curve. This has been validated for currents up to 3A. The remainder of the currents have
unknown factors acting within the ECB. Fringing effects may have been present, however the
percentage present at a given time is unknown.
As mentioned in 2.4, in order to predict the behaviour of the flux in an electromagnet, a FEA
analysis would need to be conducted. A 2D analysis in comparison to a 3D analysis would
provide lower computation time but would consequently not model certain external factors that
would be present in a 3D analysis.
Design of an Electrically Controlled Eddy Current Brake 45
5.3.1.5 Motor Characteristics
The motor utilised to provide the load for the ECB was set up in such a way that the user could
set a torque and the motor would adjust the speed accordingly.
In obtaining the torque readings, the torque sensor was always reset prior to conducting readings
for the currents (0.1A – 5A). However, the torque readings at 0A at the torque set point of
0.3Nm was not consistent throughout the readings for the different currents. The offset was
factored in the results by subtracting the offset from the quadratic function used to fit the
experimental torques.
5.4 Improvements
Electrically controlled ECBs can be constructed and improved in many ways. Improvements to
the final design presented in chapter 4 are as follows:
Use shorter strips when encasing it in fibreglass to avoid air gaps in the encasement of
electromagnet.
Air gap be cut precisely to 6-7 mm provided a 5mm disc used and must be square. If a
3mm disc is used, a 5mm air gap would be required.
Tape down the connections for the wires that were joined prior to encasement procedure.
Larger disc (150-200mm radius)
Utilising a larger disc can validate the assumption that the conductive disc to be within the cross
sectional area of the air gap. This may possibly validate the torque-speed relationship in
Wouterse’s model. However, a proposed new design is presented in the remainder of this
chapter.
The proposed new design with the following factors should be considered:
o Coils should be able to be spooled to avoid manual winding, this can also be
used in conjunction a measuring tool to confirm the length of copper wire used.
This will also aid in confirming the amount of turns in each branch or section.
o Design must be able to be integrated with existing equipment (motor, aluminium
disc).
o 150mm - 200mm radius aluminium disc.
o Adjustable air gap which allows for varying loads and speeds (use bearings and
door rollers).
Design of an Electrically Controlled Eddy Current Brake 46
o Utilise a hybrid ECB (permanent magnet and electromagnet) instead of a single
electromagnet.
The proposed design is illustrated in Appendix C: Proposed Design. This design utilises four
500 turn coils, 10 mm thick backing plate to complete the flux path, 3 mm thick aluminium
disc, and the current PMSM motor.
This design provides many advantages as well as disadvantages. The advantages include being
able to vary the speed by adjusting the air gap distance and spending minimal time winding the
coil as well as having a length to confirm the number of turns. Disadvantages consist of time to
specifically manufacture the objects, no spares and complex calculations.
5.5 Summary of results
This chapter presented known methods of determining the parameters of ECBs. However it did
not validate the assumptions as a whole due to the following factors:
1. The motor characteristics were unknown and therefore, provided offsets which were
estimated by fitting a quadratic curve and subtracting its offset from the torque values
obtained. The offset was not constant for the range of data collected.
2. The method in obtaining the majority of theoretical flux densities B was validated for
currents below 4A. The majority of the corresponding flux density values B was
significantly close to the values experimentally measured. However, at higher currents,
the percentage of difference increased.
Design of an Electrically Controlled Eddy Current Brake 47
6 Conclusion
Thus far, my thesis covering the design of an electrically controlled ECB, consisted of a
literature review of similar works of individuals, the determination of the magnetisation curve
of the core material, and the construction of the final design and construction.
In chapter 2, it was determined that Wouterse’s model would be utilised for comparison
purposes. It was also chosen due to its simplicity and application for electromagnets. As
mentioned in chapter 2.3.1, Schieber and Smythe’s models were complex and applied to
permanent magnets mainly.
The determination of the magnetisation curve provided the characteristics of the core material
and allowed for a realistic representation in terms of calculations for the theoretical torque,
speed and current. Upon completion of the construction of the final design, experimental results
were obtained to confirm the theoretical analysis. The load line method was used to determine
the flux density traveling through the air gap for specific currents. This was also compared to
experimentally measured flux densities taken on the motor test rig. The final design consisted
of using a toroidal core with two 1000 turn coils in parallel. Improvements were also determined
for the current electromagnet in chapter 5.4. The improvements also included a proposal of a
new experimental set-up and electromagnet.
Due to the geometry of the ECB developed in this research, the torque-speed relationship could
not be validated. Other unknown factors were also present in the experiments that could have
resulted in the torque speed relationship not being validated. These unknown factors may
possibly comprise of fringing effects, interactions of eddy currents and the external magnetic
field, and, conductive disc properties such as conductivity. However, the ECB has satisfied the
constraints of being able to achieve at least 0.3Nm and up to speeds of 9Hz.
Hence, from the analysis of the literature review, models and conceptual design, the ECB was
constructed and further developed. The working model was then used to verify the ECB with
Wouterse’s model and critical speed determination. Furthermore, the theoretical relationship
between torque and current could not be validated with the experimental results obtained due
to the factors discussed previously.
Design of an Electrically Controlled Eddy Current Brake 48
7 Future Works
Future works include but are not limited to:
Characterisation the motor.
3D FEA analysis of the ECB for behaviour of flux.
Determination of the behaviour of flux when the rotating aluminium disc does not fully
occupy the length of the air gap.
New mounting system with proposed electromagnet design
Investigate varying the loads and speeds by adjusting the amount of disc present in the
air gap.
Application of alternating current for varying torque loads.
Hybrid braking system (both permanent magnets and electromagnets)
The above future works allows for the comparison between permanent magnets versus
electromagnets as well as the behaviour of flux which has proved to be a critical factor in the
results obtained.
Maintaining the order of future works would find that:
Characterising the motor would minimise any losses, may potentially determine any losses and
take into account the torque offset which was observed throughout this thesis.
Conducting a FEA on the electromagnet would determine the behaviour of flux for increasing
currents. FEA can also be used to predict the behaviour of the torque-speed curve to compare
with experimental data. This method can also be used to determine the behaviour of flux when
the conductive disc is not within the air gap.
The new mounting system for the proposed electromagnet provides the opportunity to redesign
and minimise losses in the mounting system. This may minimise any torque offsets in future
experiments.
The investigation of varying the loads and speeds by adjusting the amount of disc present in the
air gap will allow minimisation of unknown factors and can potentially be more accurate than
the permanent magnet ECB used in current experiments.
Design of an Electrically Controlled Eddy Current Brake 49
Finally, applying AC currents through the ECB which will see different behaviour than when
DC currents were applied. This will allow for varying torque loads to be researched once the
above works have been completed.
Design of an Electrically Controlled Eddy Current Brake 50
8 References
[1] E. G. Thomas and A. J. Meadows, Maxwell's Equations and their Applications. Bristol,
England: Adam Hilger Ltd, 1985.
[2] W. R. Smythe, "On eddy currents in a rotating disk," Electrical Engineering, vol. 61,
pp. 681-684, 1942.
[3] B. S. Guru and H. R. Hiziroglu, Electromagnetic Field Theory Fundamentals. Boston,
Massachusetts: PWS Publishing Company, 1998.
[4] J. Bird, Electrical and Electronic Prinicples and Technology, Third ed. Massachusetts,
USA: Elsevier Ltd, 2007.
[5] P. C. Sen, Principles of Electric Machines and Power Electronics, Second ed. Canada:
John Wiley & Sons Inc., 1997.
[6] K. Karakoc, "Modelling and Design Optimization of Electromechanical Brake Actuator
Using Eddy Currents," Mechanical Engineering PhD, Department of Mechanical
Engineering, University of Victoria, 2012.
[7] G. Schweitzer and E. H. Maslen, Magnetic Bearings: Theory, Design, and Application
to Rotating Machinery: Springer, 2009.
[8] G. Bertotti, "General properties of power losses in soft ferromagnetic materials,"
Magnetics, IEEE Transactions on, vol. 24, pp. 621-630, 1988.
[9] G. Heins, "Control Methods for Smooth Operation of Permanent Magnet Synchronous
AC Motors," Doctor of Philosophy, Charles Darwin University, 2008.
[10] L. Barnes, J. Hardin, C. A. Gross, and D. Wasson, "An eddy current braking system,"
in System Theory, 1993. Proceedings SSST '93., Twenty-Fifth Southeastern Symposium
on, 1993, pp. 58-62.
[11] J. Seok-Myeong and L. Sung-Ho, "Comparison of three types of permanent magnet
linear eddy-current brakes according to magnetization pattern," Magnetics, IEEE
Transactions on, vol. 39, pp. 3004-3006, 2003.
[12] D. M. Ma and J. Shiau, "The Design of Eddy-Current Magnet Brakes," Transactions of
the Canadian Society for Mechanical Engineering, vol. 35, p. 37, 2011.
[13] X. Zhao and C. Ji, "Analysis of flux leakage in novel permanent magnet type eddy
current retarder for vehicle applications," in Vehicle Power and Propulsion Conference,
2008. VPPC '08. IEEE, 2008, pp. 1-4.
[14] V. C. A. Ferraro, Electromagnetic Theory. London: The Athlone Press, University of
London, 1956.
[15] K. Lee and K. Park, "Optimal robust control of a contactless brake system using an eddy
current," Mechatronics, vol. 9, pp. 615-631, 9// 1999.
[16] A. H. C. Gosline and V. Hayward, "Eddy Current Brakes for Haptic Interfaces: Design,
Identification, and Control," Mechatronics, IEEE/ASME Transactions on, vol. 13, pp.
669-677, 2008.
[17] H. D. Wiederick, N. Gauthier, D. A. Campbell, and P. Rochon, "Magnetic Braking:
Simple theory and experiment," American Journal of Physics, vol. Volume 55, pp. 500-
503, 1987.
Design of an Electrically Controlled Eddy Current Brake 51
[18] A. H. Gosline, G. Campion, and V. Hayward, On the use of eddy current brakes as
tunable, fast turn-on viscous dampers for haptic rendering, 2006.
[19] N. J. Caldwell and J. R. M. Taylor, "Eddy-Current Actuator for a Variable Pitch Air
Turbine," in Proc. Third European Wave Power Conference, Patras, Greece, 1998.
[20] E. Simeu and D. Georges, "Modeling and control of an eddy current brake," Control
Engineering Practice, vol. 4, pp. 19-26, 1// 1996.
[21] J. H. Wouterse, "Critical torque and speed of eddy current brake with widely separated
soft iron poles," Electric Power Applications, IEE Proceedings B, vol. 138, pp. 153-
158, 1991.
[22] D. Schieber, "Braking torque on rotating sheet in stationary magnetic field," Electrical
Engineers, Proceedings of the Institution of, vol. 121, pp. 117-122, 1974.
[23] M. Heald, "Magnetic Braking: Improved Theory," American Journal of Physics, vol.
56, 1988.
[24] M. O. Gulbahce, D. A. Kocabas, and A. K. Atalay, "A study to determine the act of
excitation current on braking torque for a low power eddy current brake," in Electric
Machines & Drives Conference (IEMDC), 2013 IEEE International, 2013, pp. 1321-
1325.
[25] M. O. Gulbahce, D. A. Kocabas, and I. Habir, "Finite elements analysis of a small power
eddy current brake," in MECHATRONIKA, 2012 15th International Symposium, 2012,
pp. 1-5.
[26] S. E. Gay and M. Ehsani, "Parametric analysis of eddy-current brake performance by 3-
D finite-element analysis," Magnetics, IEEE Transactions on, vol. 42, pp. 319-328,
2006.
[27] M. Hecquet, P. Brochet, J. Lee Sang, and P. Delsalle, "A linear eddy current braking
system defined by finite element method," Magnetics, IEEE Transactions on, vol. 35,
pp. 1841-1844, 1999.
[28] W. J. Duffin, Electricity and magnetism. London ; New York: McGraw-Hill, 1990.
[29] W. L. Soong, "BH Curve and Iron Loss Measurements for Magnetic Materials," Power
Engineering Briefing Notes (PEBN), p. 4, 2008.
[30] N. E. R. Center. (2012, 04-10-2013). Material Properties Tables Electrical
Conductivity and Resistivity. Available: http://www.ndt-ed.org/index_flash.htm
[31] M. Z. Bahorom, M. Z. Nuawi, G. Priyandoko, and S. M. Harris, "Eddy Current Braking
Experiment using Brake Disc from aluminium series of Al6061 and Al7075," in 1st
International Conference on Mechanical Engineering Research 2011, 2012.
[32] Keywolf. American Wire Gauge (AWG) Sizes and Current Limits. Available:
http://www.keywolf.com/American_Wire_Gauge.php
[33] PolySource. (2014, 19/04/2014). Polyurethane Products. Available:
http://www.polysource.com.au/products/polyurethane.html
[34] Molded Fiber Glass Companies. (2014, 19/04/2014). Polyurethane Resins. Available:
http://www.moldedfiberglass.com/materials/polyurethane-resins
[35] Molded Fibre Glass Companies. (2014, 19/04/2014). Epoxy Resins. Available:
http://www.moldedfiberglass.com/materials/epoxy-resins
Design of an Electrically Controlled Eddy Current Brake 52
Appendices
Appendix A: Matlab Files
Hysteresis Curve and Magnetisation Curve Matlab File
close all, clear all, clc % for i=0:30
vsf=load(sprintf('%d_vsense.txt',i)); cf=load(sprintf('%d_current.txt',i));
tt=(vsf(1:1000,1)); vv=vsf(1:1000,2); cc=cf(1:1000,2); % [Bt,H]=hysteresis(tt,vv,cc);
for m=1:1000 Bt1(i+1,m)=Bt(1,m); H1(m,i+1)=H(m,1);
end end
for i=1:31 for m=1:1000
plot(H1(m,i),Bt1(i,m))
end hold on end
title('Hysteresis Curve') xlabel('H (At/m)') ylabel('B (T)')
for i=1:30
Bt2(i)=max(Bt1(i,:)); H2(i)=max(H1(:,i)); end
figure
plot(H2,Bt2,'*')
axis([0,1050,1,2.3]) title('B-H Curve') xlabel('H (At/m)') ylabel('B (T)')

Design of an Electrically Controlled Eddy Current Brake 53
Hysteresis Function File
function [ Bt,H ] = hysteresis(tt,vv,cc ) %UNTITLED2 Summary of this function goes here % Detailed explanation goes here\
Nmain=50; lcore=pi*0.1525;
%mean of vsense and current mvsense=mean(vv); mcurrent=mean(cc);
vv1=vv(1:1000)-mvsense; cc1=cc-mcurrent; %remove dc offset
%The magnetic Field Intensity (H) eqn 1 H=(Nmain.*cc)/lcore;
Nsense=15; Acore=1360*(10^-6); delt=0.02*(10^(-3)); % for k=1:1000
% lambdas(k,1)=trapz(vsense(k)); % lambdas(k,1)=vsense(k); lambdas1(1)=vv1(1)*delt;
lambdas1(k+1)=lambdas1(k)+(vv1(k)*delt);
end
mlambdas=mean(lambdas1); lambdas2=lambdas1-mlambdas; %remove dc offset
%Flux Density (B) eqn 3 B=lambdas2/(Acore*Nsense);
Bt=B(1,2:1001);
end
Design of an Electrically Controlled Eddy Current Brake 54
Corresponding Flux Density from Load Line method
close all, clear all, clc
%% Load and display original data %Load BH Curve determined in BHCurve.m load('bhcurv')
% Include (0,0) as a point Bt2(1,length(Bt2)+1)=0; H2(1,length(Bt2)+1)=0;
%Sort data for B and apply to H via Index vector [magdata(1,:) I]=sort(Bt2(1,2:length(Bt2)));
for n=1:length(Bt2)-1 magdata(2,n)=H2((I(n))+1); end
% Plot BH Curve plot(magdata(2,1:19),magdata(1,1:19),'*magenta') title('BH Curve') xlabel('Field Intensity H (At/m)') ylabel('Flux Density B (T)') % axis([0 250 0 2.0]) hold on
%% Lines of best fit
%Provide evenly spaced data points for field intensity % xH=linspace(0,magdata(2,length(magdata(2,:)))); xH=linspace(0,550,1000000);
Hfield=magdata(2,:); BFlux=magdata(1,:);
save('magdata','BFlux','Hfield')
% Find coefficients for curve fitting to 10th degree p = polyfit(Hfield,BFlux,10);
BFluxfit = polyval(p,xH);
% Plot the curve plot(xH,BFluxfit,'bl')
%% Determine the Flux Density required at a certain current
%Permeability of Air aperm=(4e-7*pi);
%Input Currents
Design of an Electrically Controlled Eddy Current Brake 55
I = [0.1 0.2 0.3 0.4 0.5 1 2 3 4 5];
%Length of Core L=2*pi*0.07625;
%Number of Turns for 1 Branch N=1048;
for i=1:length(I)
% Gradient and intercepts mm = -aperm*(L/0.008); cc(i) = N*I(i)*aperm/(0.008);
% Provides equally speaced values along the Field Intensity HH(i,:) = linspace(0, (N*I(i)/L),1000);
%Line for Flux Density at input current BB(i,:) = mm*HH(i,:)+cc(i);
plot(HH(i,:),BB(i,:),'-k')
end
Torque vs. Speed and Current vs. Flux Matlab file
%% Torque Speed Curve
close all, clear all, clc
% Wouterse (modified) Model a=0.032; %Cross sectional width b=0.0425; %Cross sectional length t=0.008; %Thickness of air-gap B = [0.01623 0.03266 0.04909 0.06558 0.08198 0.1641 0.3286 0.4929 0.6572
0.8223];
%Conductivity of Aluminium Disc sigma=2.72*(10^7);
% Radius of Disc r=0.0975;
% Parameters for the equation
% Distance from centre of disc to the centre magnetic footprint R=0.0975;
D=2*sqrt((b*a)/pi); A=b/a; alpha=1-((1/(2*pi))*((4*atan(A))+(A*log(1+(1/(A^2))))-
((1/A)*log(1+(A^2))))); D=2*sqrt((b*a)/pi); c1=(1+(R/r)^2); c2=((r-R)/D)^2;
Design of an Electrically Controlled Eddy Current Brake 56
c3=1/(c1*c2); c4=abs(0.5*(1-((0.25)*c3))); % Frequencies to test f=0:0.0005:10; v=2*pi*r*f; w=2*pi*f; % Conversion RPM rpm=w*(60/(2*pi));
% Torque Speed Curve Formula for nn=1:length(B) for g=1:20001
T(nn,g)=(a*b*t*sigma*(B(nn)^2)*v(1,g)*r)*0.6689; TF(nn,g)=(a*b*t*sigma*alpha*c4*(B(nn)^2)*v(1,g)*r)*0.6689;
end end
figure plot(rpm,T) Title('Torque vs. Speed (via Experimental values of BH Curve)') xlabel('Speed (RPM)') ylabel('Torque (Nm)') legend('0.1A','0.2A','0.3A','0.4A','0.5A','1.0A','2.0A','3.0A','4.0A','5.0A
'); hold on axis([0 600 0 3])
%% Load Experimental Data
for i=1:5 Exp=load(sprintf('0_%d.txt',i));
for n=1:length(Exp(:,1)) Texp(n,i)=Exp(n,1); W(n,i)=Exp(n,2); end
Exp=load(sprintf('%d.txt',i));
for n=1:length(Exp(:,1)) Texp(n,i+5)=Exp(n,1); W(n,i+5)=Exp(n,2); end end
%% plot them all individually figure T01=Texp(1:13,1)-0.079; S01=W(1:13,1)*60; plot(S01,T01,'*magenta',rpm,T(1,:),rpm,TF(1,:)); title('0.1A') xlabel('Speed (RPM)') ylabel('Torque (Nm)') legend('Experimental results','Theoretical without factors','Theoretical
with factors')
% figure
Design of an Electrically Controlled Eddy Current Brake 57
T02=Texp(1:13,2)-0.23; S02=W(1:13,2)*60; plot(S02,T02,'*magenta',rpm,T(2,:),rpm,TF(2,:)); title('0.2A') xlabel('Speed (RPM)') ylabel('Torque') legend('Experimental results','Theoretical without factors','Theoretical
with factors')
% figure T03=Texp(1:14,3)-0.3; S03=W(1:14,3)*60; plot(S03,T03,'*magenta',rpm,T(3,:),rpm,TF(3,:)); title('0.3A') xlabel('Speed (RPM)') ylabel('Torque (Nm)') legend('Experimental results','Theoretical without factors','Theoretical
with factors')
% figure T04=Texp(1:14,4)-0.29; S04=W(1:14,4)*60; plot(S04,T04,'*magenta',rpm,T(4,:),rpm,TF(4,:)); title('0.4A') xlabel('Speed (RPM)') ylabel('Torque (Nm)') legend('Experimental results','Theoretical without factors','Theoretical
with factors')
%
figure T05=Texp(1:14,5)-0.23; S05=W(1:14,5)*60; plot(S05,T05,'*magenta',rpm,T(5,:),rpm,TF(5,:)); title('0.5A') xlabel('Speed (RPM)') ylabel('Torque (Nm)') legend('Experimental results','Theoretical without factors','Theoretical
with factors')
% % figure T1=Texp(1:16,6)-0.21; S1=W(1:16,6)*60; plot(S1,T1,'*magenta',rpm,T(6,:),rpm,TF(6,:)); title('1.0A') xlabel('Speed (RPM)') ylabel('Torque (Nm)') legend('Experimental results','Theoretical without factors','Theoretical
with factors')
% figure T2=Texp(1:20,7)-0.22; S2=W(1:20,7)*60; plot(S2,T2,'*magenta',rpm,T(7,:),rpm,TF(7,:)); title('2.0A')
Design of an Electrically Controlled Eddy Current Brake 58
xlabel('Speed (RPM)') ylabel('Torque (Nm)') legend('Experimental results','Theoretical without factors','Theoretical
with factors')
figure T3=Texp(1:27,8)-0.22; S3=W(1:27,8)*60; plot(S3,T3,'*magenta',rpm,T(8,:),rpm,TF(8,:)); title('3.0A') xlabel('Speed (RPM)') ylabel('Torque (Nm)') legend('Experimental results','Theoretical without factors','Theoretical
with factors')
figure T4=Texp(1:26,9)-0.19; S4=W(1:26,9)*60; plot(S4,T4,'*magenta',rpm,T(9,:),rpm,TF(9,:)); hold on title('4.0A') xlabel('Speed (RPM)') ylabel('Torque (Nm)') legend('Experimental results','Theoretical without factors','Theoretical
with factors')
figure T5=Texp(1:28,10)-0.28; S5=W(1:28,10)*60; plot(S5,T5,'*magenta',rpm,T(10,:),rpm,TF(10,:)); title('5.0A') xlabel('Speed (RPM)') ylabel('Torque (Nm)') legend('Experimental results','Theoretical without factors','Theoretical
with factors')
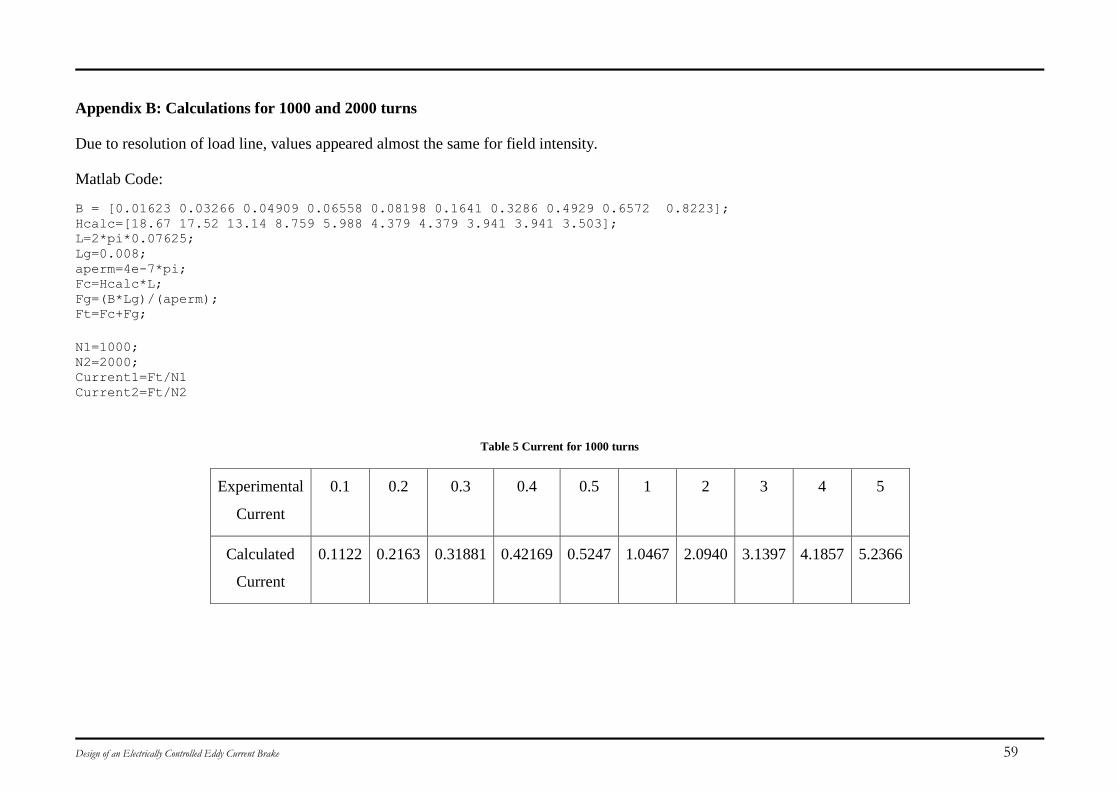
Design of an Electrically Controlled Eddy Current Brake 59
Appendix B: Calculations for 1000 and 2000 turns
Due to resolution of load line, values appeared almost the same for field intensity.
Matlab Code:
B = [0.01623 0.03266 0.04909 0.06558 0.08198 0.1641 0.3286 0.4929 0.6572 0.8223]; Hcalc=[18.67 17.52 13.14 8.759 5.988 4.379 4.379 3.941 3.941 3.503]; L=2*pi*0.07625; Lg=0.008; aperm=4e-7*pi; Fc=Hcalc*L; Fg=(B*Lg)/(aperm); Ft=Fc+Fg;
N1=1000; N2=2000; Current1=Ft/N1 Current2=Ft/N2
Table 5 Current for 1000 turns
Experimental
Current
0.1 0.2 0.3 0.4 0.5 1 2 3 4 5
Calculated
Current
0.1122 0.2163 0.31881 0.42169 0.5247 1.0467 2.0940 3.1397 4.1857 5.2366
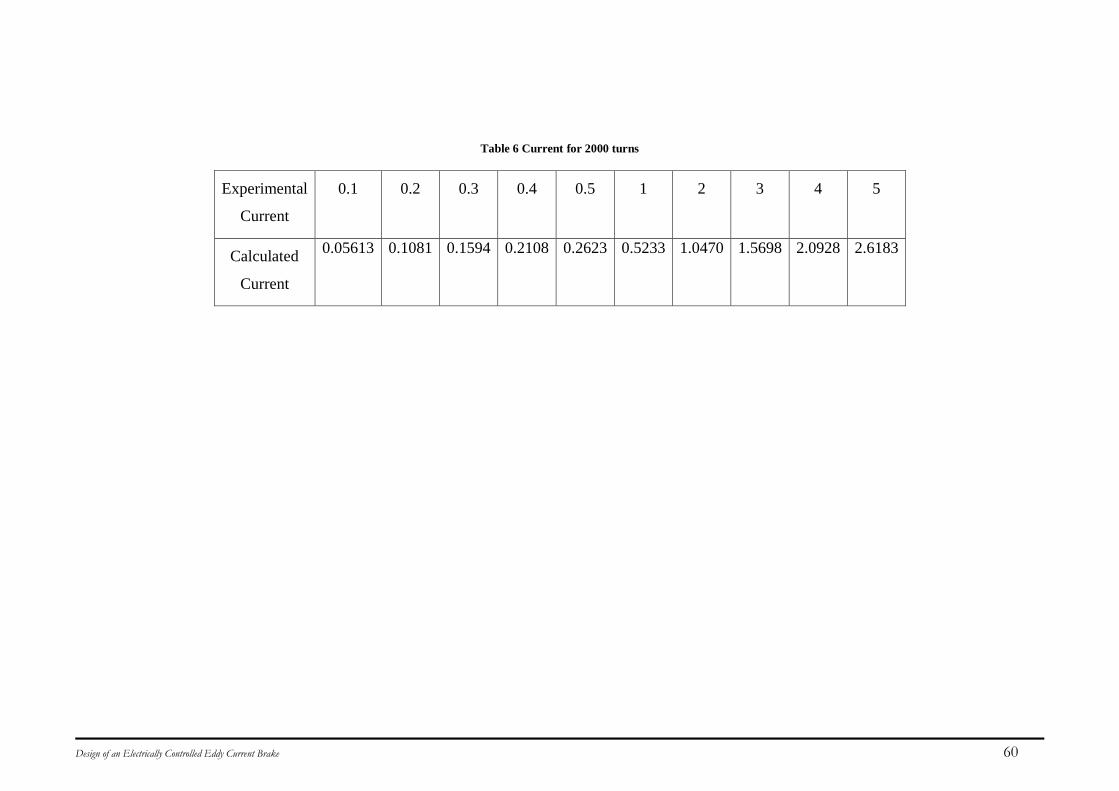
Design of an Electrically Controlled Eddy Current Brake 60
Table 6 Current for 2000 turns
Experimental
Current
0.1 0.2 0.3 0.4 0.5 1 2 3 4 5
Calculated
Current
0.05613 0.1081 0.1594 0.2108 0.2623 0.5233 1.0470 1.5698 2.0928 2.6183
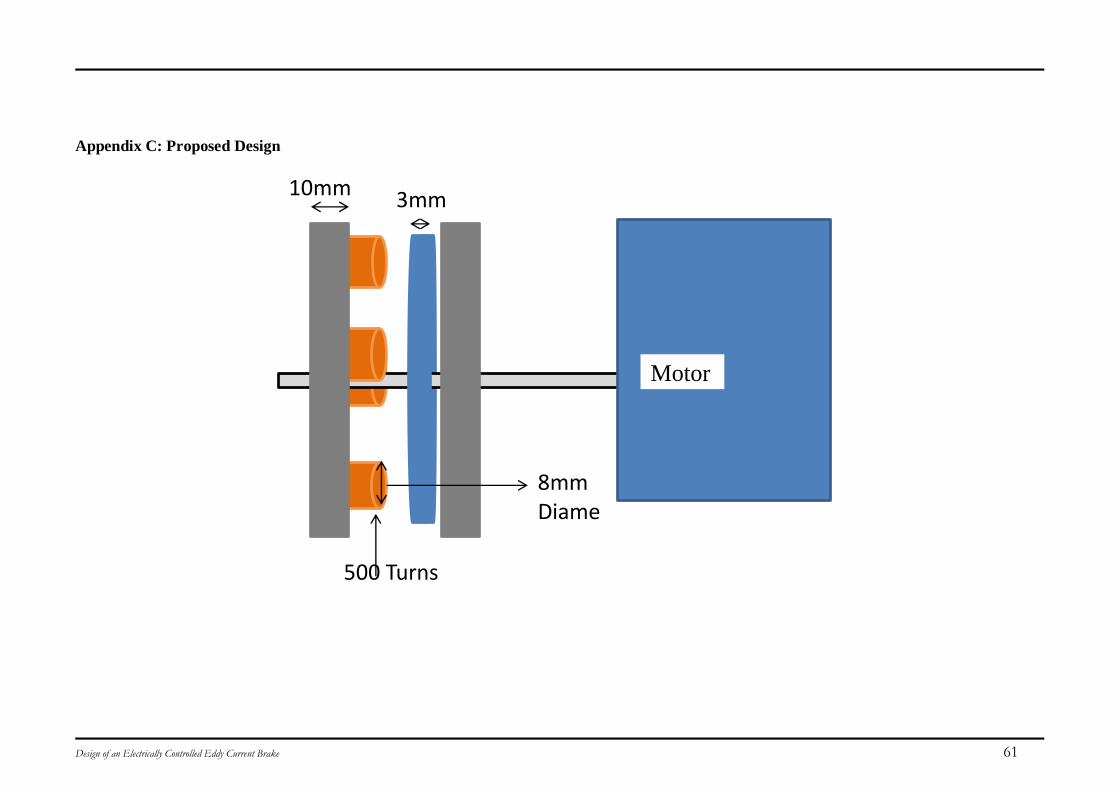
Design of an Electrically Controlled Eddy Current Brake 61
Appendix C: Proposed Design
3mm
500 Turns
10mm
8mm Diameter
Motor