DesarrollodeTeoremasparalaIntegralde Riemann ... · de f,α,a,b y en lo absoluto del símbolo x que...
77
Desarrollo de Teoremas para la Integral de Riemann-Stieltjes y Lebesgue. Robinson Ernesto Calvo Cano Director: Leonardo Jiménez Moscovitz Matemático Esp. Informática y Ciencias de la Computación Fundación Universitaria Konrad Lorenz Facultad de Matemáticas 9 de diciembre de 2007 Resumen En este trabajo se expone el desarrollo detallado de los principales teo- remas relacionados con la Integral de Riemann, y los árboles que mues- tran los caminos necesarios para realizar las demostraciones expuestas. Luego se exponen los principales teoremas relacionados con la integral de Lebesgue, con el objetivo de realizar una comparación entre la integral de Riemann y la integral de Lebesgue. 1
Transcript of DesarrollodeTeoremasparalaIntegralde Riemann ... · de f,α,a,b y en lo absoluto del símbolo x que...

Desarrollo de Teoremas para la Integral de
Riemann-Stieltjes y Lebesgue.
Robinson Ernesto Calvo Cano
Director:Leonardo Jiménez Moscovitz
MatemáticoEsp. Informática y Ciencias de la Computación
Fundación Universitaria Konrad LorenzFacultad de Matemáticas
9 de diciembre de 2007
Resumen
En este trabajo se expone el desarrollo detallado de los principales teo-remas relacionados con la Integral de Riemann, y los árboles que mues-tran los caminos necesarios para realizar las demostraciones expuestas.Luego se exponen los principales teoremas relacionados con la integral deLebesgue, con el objetivo de realizar una comparación entre la integral deRiemann y la integral de Lebesgue.
1

Índice
Introducción 4
1. Objetivos 51.1. Objetivos Generales . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2. Objetivos Específicos . . . . . . . . . . . . . . . . . . . . . . . . . 5
2. Preliminares 62.1. Definiciones y Notación Básica . . . . . . . . . . . . . . . . . . . 6
3. Integral de Riemann-Stieltjes 73.1. Propiedades Lineales . . . . . . . . . . . . . . . . . . . . . . . . . 73.2. Integración por Partes . . . . . . . . . . . . . . . . . . . . . . . . 113.3. Cambio de Variable . . . . . . . . . . . . . . . . . . . . . . . . . . 123.4. Reducción a una Integral de Riemann . . . . . . . . . . . . . . . 143.5. Funciones Escalonadas como Integradores . . . . . . . . . . . . . 163.6. Reducción de una Integral de Riemann-Stieltjes a una Suma Finita 183.7. Fórmula de Sumación de Euler . . . . . . . . . . . . . . . . . . . 203.8. Integradores Monótonos Crecientes. Integrales Superior e Inferior 21
3.9. Propiedad Aditiva y Lineal de las Integrales Superior e Inferior . 263.10. Condición de Riemann . . . . . . . . . . . . . . . . . . . . . . . . 263.11. Teoremas de Comparación . . . . . . . . . . . . . . . . . . . . . . 283.12. Integradores de Variación Acotada . . . . . . . . . . . . . . . . . 303.13. Condición Suficiente Para la Existencia de Las Integrales de Riemann-
Stieltjes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.14. Condiciones Necesarias para la Existencia de las Integrales de
Riemann-Stieltjes . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.15. Teoremas de Valor Medio para las Integrales de Riemann-Stieltjes 363.16. La Integral como una Función de Intervalo . . . . . . . . . . . . . 37
4. Integral de Lebesgue 394.1. Funciones Escalonadas, Sucesión de Funciones Escalonadas y su
Integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.2. Funciones Superiores y sus Integrales . . . . . . . . . . . . . . . . 43
4.2.1. Propiedades de la Integral de Funciones Superiores . . . . 444.3. La Clase de las Funciones Integrables de Lebesgue . . . . . . . . 464.4. Propiedades Generales de la Integral de Lebesgue . . . . . . . . . 474.5. Integral de Lebesgue en Conjuntos de Medida Cero . . . . . . . . 52
4.6. Teoremas de Levi y Convergencia Dominada . . . . . . . . . . . . 524.7. Integradores de Lebesgue sobre Intervalos no Acotados . . . . . . 614.8. Funciones Medibles . . . . . . . . . . . . . . . . . . . . . . . . . . 624.9. Continuidad de Funciones Definidas por medio de Integrales de
Lebesgue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
2

5. Comparación entre las Integrales de Riemann-Stieltjes y lasintegrales de Lebesgue 655.1. Diagramas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6. Conclusiones 76
Introducción
El presente trabajo trata fundamental mente sobre los teoremas de la inte-gral de Riemann-Stieltjes desarrollándolos detenida y minuciosamente tratandode dejarlos explicados formalmente, sin dejar huecos en las demostraciones yhaciendo los procedimientos que cada uno implica sin saltarse ninguno de lospasos.
En las Integrales de Lebesgue se hace una breve explicación de los principalesteoremas, casi como aparecen en cualquier libro de análisis matemático.
Para posteriormente realizar una comparación entre estos dos tipos de inte-grales y realizar un diagrama de árbol de las principales definiciones y teoremascontenidas en el trabajo.
4
1. Objetivos
1.1. Objetivos Generales
El objeto del presente trabajo es presentar la teoría sobre las Integrales deRiemann-Stieltjes y las Integrales de Lebesgue comparándolas y dar las basespara en un futuro ampliar el estudio de estas teorías y dejar un referente parafuturas investigaciones sobre las teorías de Integración existentes.
1.2. Objetivos Específicos
1. Hacer un desarrollo detallado de las integrales de Riemann-Stieltjes, expli-cando lo mas ampliamente cada uno de los teoremas relevantes para estetipo de integral.
2. Presentar las integrales de Lebesgue, mostrando algunos de sus principalesteoremas.
3. Realizar una comparación entre las integrales de Riemann-Stieltjes y lasintegrales de Lebesgue.
4. Realizar un diagrama de árbol en el cual se mostrara el desarrollo cronológi-co de las diferentes definiciones y demostraciones, para así poder compren-der mejor el desarrollo de las teorías de la Integral de Riemann-Stieltjes yde la Integral de Lebesgue.
5

2. Preliminares
2.1. Definiciones y Notación Básica
A lo largo del presente escrito se trabajará con la siguiente notación básica:
Definición 2.1 Las definiciones básicas son las siguientes:
1. En general se tendrá que [a, b] representa un intervalo compacto. Si enel contexto se hace referencia a las funciones f, g, .. se considerará que setratan de funciones reales y acotadas en dicho [a, b].
2. Una partición P de [a, b] es un conjunto finito de puntos P = {x0,x1,..., xn}donde a = x0 < x1 < ... < xn = b.
3. Una partición P ′ de [a, b] es un refinamiento de P si P ⊆ P ′.
4. Se tiene que ∆αk = α(xk)− α(xk−1). Se puede entender a ∆αk como la
variación correspondiente al k−esimo subintervalo, resultandon∑
k=1
∆αk =
α(b)− α(a).
5. El conjunto de todas las posibles particiones de [a, b] se designara por℘[a, b].
6. La norma de una partición P, designada por ‖P‖ será la longitud delmayor de los subintervalos de P y si P ′ ⊇ P entonces ‖P ′‖ ≤ ‖P‖.
7. α↗ en [a, b] significa que α es creciente en [a, b].
Definición 2.2 (Continuidad Uniforme) Sea f : S → T una función de unespacio metrico (S, dS) en otro espacio métrico (T, dT ) . entonces, se dice quef es uniformente contínua en un subconjunto A de S si verifica, que para cadaε > 0 existe un δ > 0 (que depende exclusivamente de ε) tal que si x ∈ A yp ∈ A entonces
dT (f (x) , f (p)) < ε siempre que ds (x.p) < δ
Teorema 2.1 (Teorema del valor medio generalizado) Sean f y g dos fun-ciones contínuas que poseen derivada (finita o infinita) en cada uno de los puntosdel intervalo abierto (a, b) y cada una es continua en los puntos externos a y b yno existe ningún punto x del interior del intervalo en el que f ′(x) y g′ (x) seanambas infinitas. Entonces para algun punto c interior se tiene
f ′ (c) [g (b)− g (a)] = g′ (c) [f (b)− f (a)]
6

3. Integral de Riemann-Stieltjes
Definición 3.1 (Integral de Riemann-Stieltjes) Sea P = {x0,x1,..., xn} unapartición de [a, b] y tk un punto dentro del subintervalo [xk−1, xk]. Entonces sepuede definir:
1. Una suma de Riemann-Stieltjes de f respecto de α, dada una partición
P, se define como S(P, f, α) =n∑
k=1
f(tk)∆αk.
2. La función f es Riemann integrable respecto de α en [a, b], y se escribirácomo f ∈ R(α) en [a, b], si existe un número A que satisface que paracada ε > 0 existe una partición Pε de [a, b] tal que para cada refinamientoP mas fino que Pε y cada elección de puntos tk del intervalo [xk−1, xk]se tiene que |S(P, f, α)−A| < ε. Cuando este numero A existe es único
y se representa por medio de∫ baf(x)dα(x) o abreviando
∫ bafdα y se le
llamará la Integral de Riemann-Stieltjes. En esta expresión, f y αserán integrando e integrador respectivamente.
3. Si α(x) = x, entonces la suma definida en 1 se escribe simplemente comoS(P, f) y la función definida en 2 se escribe como f ∈ R en [a, b], lacual es la integral usual de Riemann y que se designa normalmente por∫ baf(x)dx o
∫ bafdx.
4. El valor numérico de la integral de Riemann-Stieltjes depende solamentede f, α, a, b y en lo absoluto del símbolo x que puede ser remplazado porcualquier otro sin que afecte para nada la integral.
3.1. Propiedades Lineales
Teorema 3.1 (Propieda Lineal 1) Si f ∈ R(α) y g ∈ R(α) en [a, b], en-tonces (c1f + c2g) ∈ R(α) en [a, b] para cualquier par de constantes c1 y c2 yademás se tiene que
∫ b
a
(c1f + c2g)dα = c1
∫ b
a
fdα+ c2
∫ b
a
gdα
Demostración. Sea h = c1f + c2g. Dada una partición P de [a, b] se puedeescribir:
S(P, h, α) =n∑
k=1
h(tk)∆αk = c1
n∑
k=1
f(tk)∆αk + c2
n∑
k=1
g(tk)∆αk
= c1S(P, f, α) + c2S(P, g, α)
7

dado ε > 0. Se elige P ′ε tal que P ⊇ P ′ε implique∣∣∣S(P, f,α)−
∫ bafdα
∣∣∣ < ε y P ′′ε
tal que P ⊇ P ′′ε implique∣∣∣S(P, g, α)−
∫ bagdα
∣∣∣ < ε. Si se toma Pε = P ′ε ∪P ′′ε , se
tiene que P es mas fina que Pε y entonces:
|S(P, f, α) + S(P, f, α)−A| ≤ |c1| ε+ |c2| ε
=⇒∣∣∣S(P, f, α) + S(P, g, α)− (c1
∫ bafdα+ c2
∫ bagdα)
∣∣∣ ≤ |c1| ε+ |c2| ε
=⇒∣∣∣S(P, h, α)− (c1
∫ bafdα+ c2
∫ bagdα)
∣∣∣ ≤ |c1| ε+ |c2| ε
pero como∣∣∣S(P, h, α)−
∫ bahdα
∣∣∣ ≤ |c1| ε + |c2| ε y por la definición 2 de la
Integral de Riemann-Stieltjes∫ bahdα es único resulta:
∫ b
a
hdα = c1
∫ b
a
fdα+c2
∫ b
a
gdα ⇐⇒
∫ b
a
(c1f+c2g)dα = c1
∫ b
a
fdα+c2
∫ b
a
gdα
Teorema 3.2 (Propiedad Lineal 2) Si f ∈ R(α) y f ∈ R(β) en [a, b], en-tonces f ∈ R(c1α+ c2β) en [a, b] para cualquier par de constantes c1 y c2. Portanto se tiene que:
∫ b
a
fd(c1α+ c2β) = c1
∫ b
a
fdα+ c2
∫ b
a
fdβ
Demostración. Sea λ = c1α+ c2β. Dada una partición P de [a, b] se puedeescribir:
S(P, f, λ) =n∑
k=1
f(tk)∆λk = c1
n∑
k=1
f(tk)∆αk + c2
n∑
k=1
f(tk)∆βk
= c1S(P, f, α) + c2S(P, f, β)
dado ε > 0. Se elige P ′ε tal que P ⊇ P ′ε implique∣∣∣S(P, f,α)−
∫ bafdα
∣∣∣ < ε y P ′′ε
tal que P ⊇ P ′′ε implique∣∣∣S(P, f, β)−
∫ bafdβ
∣∣∣ < ε. Si se toma Pε = P ′ε ∪P ′′ε , se
8

tiene que para p mas fina que Pε entonces:
|S(P, f, α) + S(P, f, β)−A| ≤ |c1| ε+ |c2| ε
=⇒∣∣∣S(P, f, α) + S(P, f, β)− (c1
∫ bafdα+ c2
∫ bafdβ)
∣∣∣ ≤ |c1| ε+ |c2| ε
=⇒∣∣∣S(P, f, λ)− (c1
∫ bafdα+ c2
∫ bafdβ)
∣∣∣ ≤ |c1| ε+ |c2| ε
pero como∣∣∣S(P, f, λ)−
∫ bafdλ
∣∣∣ ≤ |c1| ε + |c2| ε y por la definición 4 de la
Integral de Riemann-Stieltjes∫ bafdλ es único y resulta
∫ b
a
fdλ = c1
∫ b
a
fdα+c2
∫ b
a
fdβ ⇐⇒
∫ b
a
fd(c1α+c2β) = c1
∫ b
a
fdα+c2
∫ b
a
fdβ
Teorema 3.3 (Propiedad Lineal 3) Si se tiene c ∈ (a, b), se cumple que si
existen dos de las integrales∫ bafdα,
∫ cafdα o
∫ bcfdα , entonces la tercera
integral existe y además:
∫ b
a
fdα =
∫ c
a
fdα+
∫ b
c
fdα
Demostración. Sea P una partición de [a, b] tal que c ∈ P , y sean P ′ =P ∩ [a, c] y P ′′ = P ∩ [c, b] las particiones correspondientes a [a, c] y [c, b] respec-tivamente. Las sumas de Riemann-Stieltjes asociadas a estas particiones estanligadas por la ecuación S(P, f, α) = S(P ′, f, α) + S(P ′′, f, α).
1. Se supone la existencia de∫ cafdα y
∫ bcfdα. Entonces para ε > 0 existe
P ′ε de [a, c] tal que si P ′ ⊇ P ′ε se tiene
∣∣∣∣S(P′, f, α)−
∫ c
a
fdα
∣∣∣∣ <ε
2(1)
y existe P ′′ε de [c, b] tal que si P ′′ ⊇ P ′′ε se tiene que
∣∣∣∣∣S(P ′′, f, α)−
∫ b
c
fdα
∣∣∣∣∣<
ε
2(2)
Si Pε = P ′ε ∪ P ′′ε es una partición de [a, b] tal que si P es una partición
9

mas fina que Pε y combinando las ecuaciones 1 y 2 se tiene:
∣∣∣∣∣S(P ′, f, α) + S(P ′′, f, α)−
∫ c
a
fdα−
∫ b
c
fdα
∣∣∣∣∣<
ε
2+
ε
2
implica que ∣∣∣∣∣S(P, f, α)−
∫ c
a
fdα−
∫ b
c
fdα
∣∣∣∣∣< ε
y por la definición 2 de la integral de Riemann-Stieltjes resulta
∫ c
a
fdα =
∫ c
a
fdα+
∫ b
c
fdα
2. Se supone la existencia de∫ bafdα y
∫ cafdα. Entonces para ε > 0 existe
Pε de [a, b] tal que si P ⊇ Pε se tiene
∣∣∣∣∣S(P, f, α)−
∫ b
a
fdα
∣∣∣∣∣< ε (3)
y existe P ′ε de [a, c] tal que si P ′ ⊇ P ′ε se tiene la ecuación 1 . Si P ′′ε =
Pε − P ′ε una partición de [c, b] tal que P ′′ ⊇ P ′′ε , combinando las dosecuaciones 1 y 3 se tiene:
∣∣∣∣∣S(P, f, α)− S(P ′, f, α)−
∫ b
a
fdα+
∫ c
a
fdα
∣∣∣∣∣< ε−
ε
2
implica que: ∣∣∣∣∣S(P ′′, f, α)−
∫ b
a
fdα+
∫ c
a
fdα
∣∣∣∣∣<
ε
2
y por la definición 2 de la integral de Riemann-Stieltjes resulta:
∫ b
c
fdα =
∫ b
a
fdα−
∫ c
a
fdα
10
3. Se supone la existencia de∫ bafdα y
∫ bcfdα. Entonces para ε > 0 existe
Pε de [a, b] tal que si P ⊇ Pε se tiene la ecuación 3 y existe P ′′ε de [c, b] talque si P ′′ ⊇ P ′′ε se tiene la ecuación 2. Si P ′ε = Pε − P ′′ε una partición de[a, c] tal que P ′ ⊇ P ′ε, combinando las dos ecuaciones 2 y 3 se tiene
∣∣∣∣∣S(P, f, α)− S(P ′′, f, α)−
∫ b
a
fdα+
∫ b
c
fdα
∣∣∣∣∣< ε−
ε
2
implica que ∣∣∣∣∣S(P ′, f, α)−
∫ b
a
fdα+
∫ b
c
fdα
∣∣∣∣∣<
ε
2
y por la definición 2 de la integral de Riemann-Stieltjes resulta
∫ c
a
fdα =
∫ b
a
fdα−
∫ b
c
fdα
Definición 3.2 Si a < b, se define∫ abfdα = −
∫ bafdα, dado que
∫ bafdα exista.
Definición 3.3 La integral∫ aafdα es igual a 0.
3.2. Integración por Partes
Teorema 3.4 (Integracion por Partes) Si f ∈ R(α) en [a, b], entonces α ∈R(f) en [a, b] y se tiene que:
∫ a
b
f(x)dα(x) +
∫ a
b
α(x)df(x) = f(b)α(b)− f(a)α(a)
Demostración. Sea ε > 0 un numero real dado. Como∫ abfdα existe, en-
tonces se tendrá una partición Pε de [a, b] tal que para toda P ′ ⊇ Pε se tieneque ∣∣∣∣∣
S(P ′, f, α)−
∫ b
a
fdα
∣∣∣∣∣< ε (1)
Se considerará una suma de Riemann-Stieltjes arbitraria para la integral∫ abαdf
11
. Luego:
S(P,α, f) =n∑
k=1
α(tk)∆f(xk) (2)
=n∑
k=1
α(tk)f(xk)−n∑
k=1
α(tk)f(xk−1)
en donde P es mas fina que Pε. Se hace A = f(b)α(b)− f(a)α(a), pudiendose
escribir
A =n∑
k=1
f(xk)α(xk)−n∑
k=1
f(xk−1)α(xk−1) (3)
restando 1 de 3 se tiene:
A− S(P,α, f) =n∑
k=1
f(xk)α(xk)−n∑
k=1
f(xk−1)α(xk−1)
−n∑
k=1
α(tk)f(xk) +n∑
k=1
α(tk)f(xk−1)
=n∑
k=1
f(xk) [α(xk)− α(tk)] +n∑
k=1
f(xk−1) [α(tk)− α(xk−1)]
Si se hace P ′ = {x0, t1, x1, t2, x2, ..., tn, xn} las dos sumas pueden considerarse
en una sola de la forma S(P ′, f, α), donde P ′ ⊇ P ⊇ Pε. Por lo cual, si se cumplela ecuación 1 se tiene que:
∣∣∣∣∣A− S(P,α, f)−
∫ b
a
fdα
∣∣∣∣∣< ε
siempre que P sea mas fina que Pε, asegurando de esta manera la existencia de
∫ abαdf , la cual es A−
∫ bafdα.
3.3. Cambio de Variable
Teorema 3.5 (Cambio de Variable) Sea f ∈ R(α) en [a, b] y sea g una fun-ción continua estrictamente monotona definida en un intervalo S de ex-tremos c y d. Se supone que a = g(c) y b = g(d), y se definen h y β como lasfunciones compuestas tales que h(x) = f(g(x)) y β(g(x)) si x ∈ S. Entoncesh ∈ R(β) en S y se tiene ∫ b
a
fdα =
∫ d
c
gdβ
12

resultando
∫ g(d)
g(c)
f(t)dα(t) =
∫ d
c
g(x)dβ(x)
Demostración. Se supone que g es estrictamente creciente en S (c < d). porlo cual g es inyectiva y posee inversa g−1 contínua y creciente en [a, b]. Por tantoa cada partición P = {y0, y1, ..., yn} en [c, d] le corresponde una única particiónP ′ = {x0,x1,..., xn} en [a, b] y se puede escribir que P ′ = g(P ) y P = g−1(P ′),teniendo además que un refinamiento en P produce un refinamiento en P ′ y unrefinamiento en P ′ produce un refinamiento en P.Ahora dado ε > 0, existe una
partición P ′ε en [a, b] tal que P ′ mas fina que P ′ε implica∣∣∣S(P ′, f, α)−
∫ bafdα
∣∣∣ <ε. Sea P = g−1(P ′) la partición correspondiente, y sea P = {y0, y1, ..., yn}en [c, d] mas fina que Pε, la suma de Riemann-Stieltjes correspondiente sería
S(P, h, β) =n∑
k=1
h(uk)∆βk, en la que uk ∈ [yk−1, yk] y ∆βk = β(yk)− β(yk−1)
haciendo tk = g(uk) y xk = g(yk), se tendría que P ′ = {x0,x1,..., xn} en [a, b]sería una partición mas fina que Pε resultando
S(P, h, β) =n∑
k=1
h(uk)∆βk
=n∑
k=1
h(uk) [β(yk)− β(yk−1)]
=n∑
k=1
f(g(uk)) (α [g(yk)]− α [g(yk−1)])
=n∑
k=1
f(tk) [α(xk)− α(xk−1)]
= S(P ′, f, α)
estando tk ∈ [xk−1, xk] resultando∣∣∣S(P, h, β)−
∫ bafdα
∣∣∣ < ε de donde se deduce:
S(P, h, β) = S(P ′, f, α)
13
3.4. Reducción a una Integral de Riemann
Teorema 3.6 (Reducción a una Integral de Riemann) Sea f ∈ R(α) en[a, b] y supóngase que α posee derivada α′ continua en [a, b]. Entonces la integral
Riemann∫ baf(x)α′(x)dx existe y se verifica que:
∫ b
a
f(x)dα(x) =
∫ b
a
f(x)α′(x)dx
Demostración. Sea g(x) = f(x)α′(x) y considérese la suma de Riemann:
S(P, g) =n∑
k=1
g(tk)∆xk (1)
=n∑
k=1
f(tk)α′(tk)∆xk
La misma partición P y la misma elección de puntos tk puede utilizarse para
formar la suma de Riemann-Stieltjes:
S(P, f, α) =n∑
k=1
f(tk)∆αk (2)
Aplicando el "teorema del valor medio", se puede escribir
∆αk = α(xk)− α(xk−1)
= α′(vk)(xk − xk−1)
= α′(vk)∆xk
con vk ∈ (xk−1, xk), de donde restando 1 de 2 se tiene:
S(P, f,α)− S(P, g) =n∑
k=1
f(tk)∆αk −n∑
k=1
f(tk)α′(tk)∆xk 3
=n∑
k=1
f(tk)α′(vk)∆xk −
n∑
k=1
f(tk)α′(tk)∆xk
=n∑
k=1
f(tk) [α′(vk)− α′(tk)]∆xk
devido a que f es acotada, se tiene que |f(x)| < M para todo x de [a, b] donde
14
M > 0. Por otra parte la continuidad de α′ en [a, b] implica continuidaduniforme en [a, b]. Por lo cual dado ε > 0, existe δ > 0, que depende únicamente
de ε, tal que o ≤ |x− y| < δ implica |α′(x)− α′(y)| <ε
2M(b− a). Tomando
una partición P ′ε de norma ‖P ′ε‖ < δ, entonces para P una partición mas fina
que P ′ε se tiene que |α′(vk)− α′(tk)| <ε
2M(b− a), por lo cual el valor absoluto
de 1 sería:
|S(P, f,α)− S(P, g)| =
∣∣∣∣∣
n∑
k=1
f(tk) [α′(vk)− α′(tk)]∆xk
∣∣∣∣∣
< M ·ε
2M(b− a)· (b− a)
=ε
2
resumiendo:|S(P, f, α)− S(P, g)| <
ε
2
que se puede expresar como:
|S(P, g)− S(P, f, α)| <ε
2(4)
de otra lado como f ∈ R(α) en [a, b], existe una partición P ′′ε tal que si P es
mas fina que P ′′ε resulta:
∣∣∣∣∣S(P, f, α)−
∫ b
a
fdα
∣∣∣∣∣<
ε
2(5)
Ahora combinando las ec. 4 y 5 y si P es mas fina que Pε = P ′ε ∪ P ′′ε se tiene
finalmente: ∣∣∣∣∣S(P, g)−
∫ b
a
fdα
∣∣∣∣∣< ε
15

3.5. Funciones Escalonadas como Integradores
Se presenta a continuación la definición de función escalonada, que es impor-tante para simplificar conceptualmente aspectos más complejos de la integral deRiemann, y facilita muchas demostraciones.
Definición 3.4 (Función Escalón) Una función α de [a, b] es una funciónescalonada si existe una partición a = x1 < x2 < ... < xn = b de modo queα es constante en cada subintervalo abierto (xk−1, xk) , para 1 < k ≤ n. Alnúmero α
(x+k)− α
(x−k)se denomina salto en xk, si 1 < k < n. El salto en x1
es α(x+1 )− α (x1) y en xn es α (xn)− α (x−n ) .
Definición 3.5 Si α es constante en [a, b], la integral∫ bafdα existe y vale cero.
Esto se puede verificar, ya que:
S(P, f, α) =n∑
k=1
f(tk)∆αk
=n∑
k=1
f(tk)n∑
k=1
∆αk
=n∑
k=1
f(tk) [α (b)− α (a)]
y como α es constante α (b) = α (a) resulta:
S(P, f, α) =n∑
k=1
f(tk) [α (b)− α (a)]
=n∑
k=1
f(tk) · 0
= 0
Definición 3.6 Si α es constante en [a, b] menos en un punto q donde α (q)
presenta una discontinuidad de salto, la integral∫ bafdα puede no existir y si
existe no necesariamente es cero.
Teorema 3.7 Dados a < c < b, se define α en [a, b] como los valores α (a),α (b) y α (c) arbitrarios:
α (x) = α (a) si a ≤ x < c
yα (x) = α (b) si c < x ≤ b
16

Sea f una función definida en [a, b] de manera que por lo menos una de las
funciones f o α es continua a la derecha de c y por lo menos una de ellas escontinua a la izquierda de c. Entonces f ∈ R(α) en [a, b] y
∫ b
a
fdα = f(c)[α(c+)− α
(c−)]
Si c = a la integral∫ bafdα se cumple reemplazando α (c−) por α (c) y si c = b
se cumple reemplazando α (c+)
Demostración. Sea P una partición de [a, b]. Si c ∈ P, y si se tiene que P0 ={x0, x1, ..., c
−, c, c+, ..., xn} la suma S(P, f, α) es cero excepto en los terminos c−,c+, quedando:
S(P, f, α) = f(tk−1)[α (c)− α
(c−)]+ f(tk)
[α(c+)− α (c)
]
donde tk−1 ≤ c ≤ tk si:
∆ = S(P, f, α)− f(c)[α(c+)− α
(c−)]
= f(tk−1)[α (c)− α
(c−)]+ f(tk)
[α(c+)− α (c)
]
−f(c)[α(c+)− α
(c−)]
= f(tk−1)α (c)− f(tk−1)α(c−)+ f(tk)α
(c+)
−f(tk)α (c)− f(c)α(c+)+ f(c)α
(c−)
= f(tk−1)α (c)− f(tk−1)α(c−)+ f(tk)α
(c+)
−f(tk)α (c)− f(c)α(c+)+ f(c)α
(c−)+ 0
= f(tk−1)α (c)− f(tk−1)α(c−)+ f(tk)α
(c+)
−f(tk)α (c)− f(c)α(c+)+ f(c)α
(c−)+ f(c)α (c)− f(c)α (c)
= [f(tk−1)− f(c)]α (c)− [f(tk−1) + f(c)]α(c−)
+[f(tk)− f(c)]α(c+)− [f(tk)− f(c)]α (c)
= [f(tk−1)− f(c)][α (c)− α
(c−)]+ [f(tk)− f(c)]
[α(c+)− α (c)
]
por la inecuación triangular |a+ b| < |a|+ |b| y por |ab| = |a| |b| se tiene
|∆| ≤∣∣[f(tk−1)− f(c)]
[α (c)− α
(c−)]∣∣+
∣∣[f(tk)− f(c)][α(c+)− α (c)
]∣∣
= |f(tk−1)− f(c)|∣∣α (c)− α
(c−)∣∣+ |f(tk)− f(c)|
∣∣α(c+)− α (c)
∣∣
Si f es continua en c, para cada ε > 0 existe un δ > 0 tal que ‖P‖ < δ implica:
|f(tk−1)− f(c)| < ε y |f(tk)− f(c)|
17
y entonces:|∆| ≤ ε
∣∣α (c)− α(c−)∣∣+ ε
∣∣α(c+)− α (c)
∣∣ (1)
Pero esta desigualdad se verifica tanto si f es continua en c como si no lo es.
Si f es discontínua a la derecha y a la izquierda de c, entonces α (c) = α (c−)y α (c) = α (c+) y se tendria ∆ = 0, si f es contínua a la derecha de c perono a la izquierda se tendria α (c) = α (c−) y |∆| ≤ ε |α (c+)− α (c)| y si f escontínua a la izquierda de c pero no a la derecha se tendria α (c) = α (c+) y|∆| ≤ ε |α (c)− α (c−)| , por lo cual la desigualdad 1 se cumpliría en todos loscasos.
3.6. Reducción de una Integral de Riemann-Stieltjes a unaSuma Finita
El siguiente teorema utiliza el concepto de función escalonada, y es de vi-tal importancia por cuanto muestra como se puede expresar una integral deRiemann como una suma finita términos, cada uno de los cuales representa unárea.
Teorema 3.8 (Reducción de Integral Riemann-Stieltjes a Suma Finita)Sea α una función escalonada definida en [a, b] con salto αk en xk , donde lospuntos x1, ..., xn son las correspondientes a una partición definida sobre [a, b]donde a = x1, x2, ..., xn = b como las descritas en la definición 3.4.
Sea f una función definida en [a, b] de manera que por lo menos una de lasfunciones f o α es contínua a la derecha de xk y una por lo menos contínua a
la izquierda de xk, entonces∫ bafdα existe y se cumple que:
∫ b
a
f (x) dα (x) =n∑
k=1
f(xk)αk
Demostración. Por el teorema 3.3 se puede escribir la integral:
∫ b
a
f (x) dα (x) =
∫ x1
a
f (x) dα (x) +
∫ x2
x1
f (x) dα (x) + ...+
∫ b
xn−1
f (x) dα (x)
donde cada integral de la forma∫ xkxk−1
f (x) dα (x) con 1 ≤ k ≤ n, cumple las
condiciones del teorema 3.7 resultando:∫ xk
xk−1
f (x) dα (x) = f(ck)[α(c+k)− α
(c−k)]
con 1 ≤ k ≤ n y xk−1 < ck ≤ xk, quedando la integral:
18

∫ xk
xk−1
f (x) dα (x) = f(c1)[α(c+1)− α
(c−1)]+ f(c2)
[α(c+2)− α
(c−2)]+
...+ f(cn)[α(c+n)− α
(c−n)]
= f(c1)α1 + f(c2)α2 + ...+ f(cn)αn
=n∑
k=1
f(xk)αk
Teorema 3.9 Dadan∑
k=1
ak, se define f en [0, n] como
f(x) = ax si k − 1 < x ≤ k, f(0) = 0
resultando:
n∑
k=1
ak =n∑
k=1
f(k) =
∫ n
0
f (x) d [x]
donde [x] es la función parte entera de x.
Demostración. La función [x] es una función escalonada contínua porderecha y con salto igual a 1 por la izquierda en 1, 2, ..., n. Para una parti-ción p = {x0, x1, ..., xn} donde 0 = x0 < x1 < ... < xn = n. Si para xk−1 y xk,[xk] = [xk−1] = r, entonces para un entero k ∈ [xk−1, xk] se tiene:
f(k)([k+]− [k−]) = f(k)[r − r]
= f(k) · 0
= 0
y si para xk−1 y xk , [xk] �= [xk−1], para un entero k ∈ [xk−1, xk] se tendrá:
f(k)([k+]− [k−]) = f(k) · 1
= f(k)
Aplicando el teorema 3.8 se tendría que:
∫ n
0
f (x) d [x] = f(0)([0+]− [0]) + f(1)([1+]− [1−])
+f(2)[[2+]− [2−]] + ...+ f(n)[[n]− [n−]]
= 0 + f(1) · 1 + f(2) · 1 + ...+ f(n) · 1
=n∑
k=1
f(k) =n∑
k=1
ak
19

3.7. Fórmula de Sumación de Euler
Se utilizan las integrales de Riemann-Stieltjes para obtener la Fórmula deSumación de Euler, la cual relaciona la integral de una función en un intervalo[a, b] con la suma de los valores de la función en los puntos enteros de[a, b]. Seutiliza para aproximar integrales mediante sumas o para estimar los valores deciertas sumas por medio de integrales.
Teorema 3.10 (Fórmula de Sumación de Euler) Si f posee derivada con-tinua f ′ en [a, b] entonces se tiene
[b]∑
n=[a]+1
=
∫ b
a
f(x)dx+
∫ b
a
f ′(x)(x− [x])dx+ f(a)(a− [a])− f(b)(b− [b]),
Si a y b son enteros, se obtiene:
b∑
n=a
f(n) =
∫ b
a
f(x)dx+
∫ b
a
f ′(x)
(x− [x]−
1
2
)dx+
f(a) + f(b)
2
Demostración. Aplicando el teorema 3.4 se obtiene:
∫ b
a
f(x)d(x− [x]) +
∫ b
a
(x− [x])df(x) = f(a)(b− [b])− f(a)(a− [a])
∫ b
a
f(x)d(x− [x]) +
∫ b
a
(x− [x])df(x) + f(a)(a− [a])− f(a)(b− [b]) = 0
Aplicando el teorema 3.2 se obtiene:
∫ b
a
f(x)dx−
∫ b
a
f(x)d[x] +
∫ b
a
(x− [x])df(x) + f(a)(a− [a])− f(a)(b− [b]) = 0
y aplicando el teorema 3.6 se tiene:
∫ b
a
f(x)dx−
∫ b
a
f(x)d[x]
(1)
+
∫ b
a
f ′(x)(x− [x])dx+ f(a)(a− [a])− f(a)(b− [b]) = 0 (1)
Debido a que la función parte entera tiene saltos unitarios en los enteros [a] +
20
1, [a] + 2, ..., [b] se puede escribir
∫ b
a
f(x)d[x] =
[b]∑
n=[a]+1
f(n)
∫ b
a
f(x)d[x]−
[b]∑
n=[a]+1
f(n) = 0 (2)
combinando y 2 se obtiene:
∫ b
a
f(x)dx−
∫ b
a
f(x)d[x] +
∫ b
a
f ′(x)(x− [x])dx+
+ f(a)(a− [a])− f(a)(b− [b]) +
∫ b
a
f(x)d[x]−
[b]∑
n=[a]+1
f(n) = 0
∫ b
a
f(x)dx+
∫ b
a
f ′(x)(x− [x])dx
+ f(a)(a− [a])− f(a)(b− [b])−
[b]∑
n=[a]+1
f(n) = 0
[b]∑
n=[a]+1
f(n) =
∫ b
a
f(x)dx+
∫ b
a
f ′(x)(x− [x])dx
+f(a)(a− [a])− f(a)(b− [b])
3.8. Integradores Monótonos Crecientes. Integrales Supe-rior e Inferior
Se presentará ahora la teoria de Riemann-Stieltjes para integradores monotonoscrecientes la cual es tan general como estudiar la teoría para integradores devariación acotada.
Cuando α es creciente, las diferencias ∆αk que aparecen en las sumas deRiemann-Stieltjes son todas no negativas. Para hallar el area de la región limi-
tada por una función, se consideran las sumas de Riemann∑
f(tk)∆xk como
21
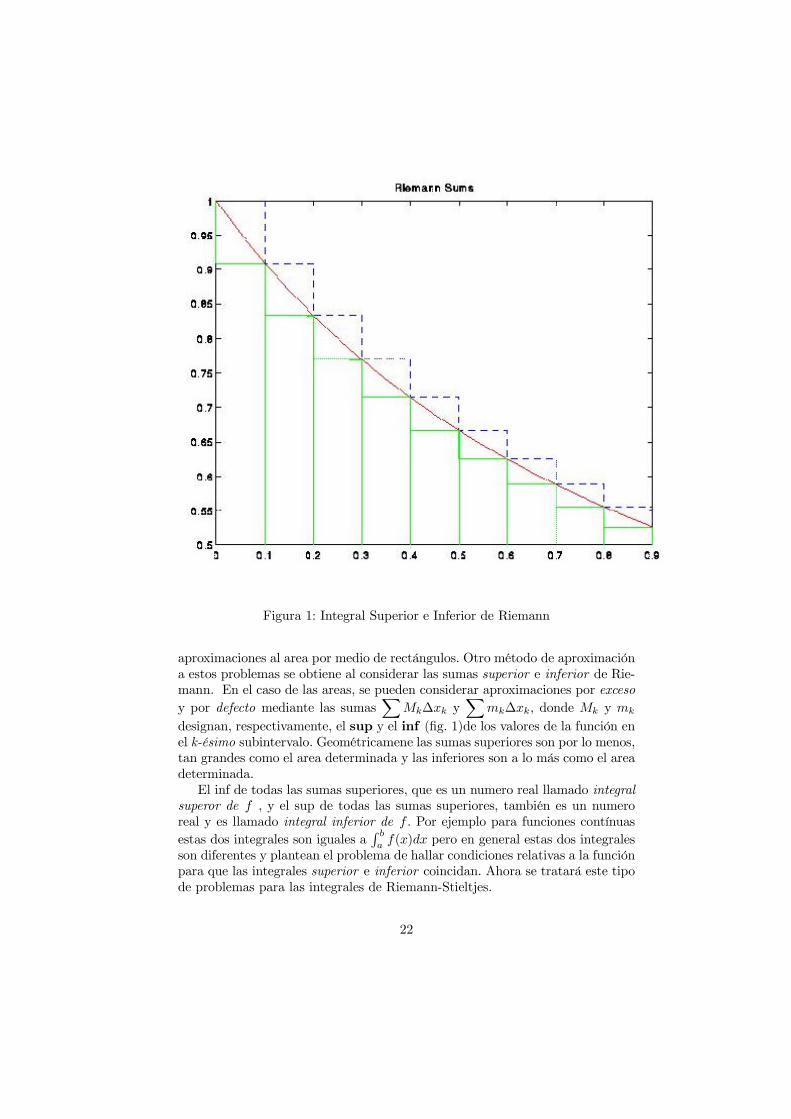
Figura 1: Integral Superior e Inferior de Riemann
aproximaciones al area por medio de rectángulos. Otro método de aproximacióna estos problemas se obtiene al considerar las sumas superior e inferior de Rie-mann. En el caso de las areas, se pueden considerar aproximaciones por exceso
y por defecto mediante las sumas∑
Mk∆xk y∑
mk∆xk, donde Mk y mk
designan, respectivamente, el sup y el inf (fig. 1)de los valores de la función enel k-ésimo subintervalo. Geométricamene las sumas superiores son por lo menos,tan grandes como el area determinada y las inferiores son a lo más como el areadeterminada.
El inf de todas las sumas superiores, que es un numero real llamado integralsuperor de f , y el sup de todas las sumas superiores, también es un numeroreal y es llamado integral inferior de f . Por ejemplo para funciones contínuas
estas dos integrales son iguales a∫ baf(x)dx pero en general estas dos integrales
son diferentes y plantean el problema de hallar condiciones relativas a la funciónpara que las integrales superior e inferior coincidan. Ahora se tratará este tipode problemas para las integrales de Riemann-Stieltjes.
22

Definición 3.7 (Sumas Superior e Inferior de Stieltjes) Sea P una par-tición de [a, b] y sean:
Mk(f) = sup {f(x) : x ∈ [xk−1, xk]} ,
mk(f) = inf {f(x) : x ∈ [xk−1, xk]}
entonces, los números
U(P, f, α) =n∑
k=1
Mk(f)∆αk y L(P, f, α) =n∑
k=1
mk(f)∆αk
se llaman, respectivamente, sumas superior e inferior de Stieltjes de f
con respecto a α para la partición P. Siempre se verifica que mk(f) ≤Mk(f) y si α ↗ en [a, b], entonces ∆αk ≥ 0 y se puede escribir también quemk(f)∆αk ≤Mk(f)∆αk = f∆Mkαk, de lo que se tiene que las sumas inferioresnunca exceden a las sumas superiores. Además si tk ∈ [xk−1, xk], entonces
mk(f) ≤ f(tk) ≤Mk(f),
De donde, cuando α↗, se tienen la desigualdades
L(P, f, α) ≤ S(P, f, α) ≤ U(P, f, α)
que relacionan las sumas superior e inferior con las sumas de Riemann-Stieltjes.
Estas desigualdades no tienen por qué verificarse si α no es una función cre-ciente
Teorema 3.11 Supóngase que α↗ en [a, b]. Entonces:
i). Si P ′ es màs fina que P , se tiene:
U(P ′, f, α) ≤ U(P, f, α) y L(P ′, f, α) ≥ L(P, f, α).
ii). Para cada par de particiones P1 y P2, se tiene:
L(P1, f, α) ≤ U(P2, f, α)
Demostración. Para probar (i) es suficiente ver el caso en donde P ′ tieneun solo punto más que P , por ejemplo c.Si c está en el intervalo i-ésimo de P ,se puede escribir:
U(P ′, f, α) =n∑
k=1k �=i
Mk(f)∆αk +M ′[α(c)− α(xi−1)] +M ′′[α(xi)− α(c)],
23
donde M ′ y M ′′ designan, respectivamente el sup de f en [xi−1, c] y [c, xi]. Pero
ya que:M ′ ≤Mi(f) y M ′′ ≤Mi(f)
se tiene que:
n∑
k=1k �=i
Mk(f)∆αk +M ′[α(c)− α(xi−1)] +M ′′[α(xi)− α(c)]
≤n∑
k=1
Mk(f)∆αk +M ′[α(c)− α(xi−1)]
resultando U(P ′, f, α) ≤ U(P, f, α). Así mismo, tomando las mismas particiones
P y P ′, se puede escribir:
L(P ′, f, α) =n∑
k=1k �=i
mk(f)∆αk +m′[α(c)− α(xi−1)] +m′′[α(xi)− α(c)],
donde m′ y m′′ designan el inf de f en [xi−1, c] y [c, xi] respectivamente. Pero
comom′ ≥ mi(f) y m′′ ≥ mi(f)
se tiene que:
n∑
k=1k �=i
mk(f)∆αk +m′[α(c)− α(xi−1)] +m′′[α(xi)− α(c)] ≥
n∑
k=1
mk(f)∆αk +m′[α(c)− α(xi−1)]
resultando L(P ′, f, α) ≥ L(P, f,α).
Para probar (ii), se toma P = P1 ∪ P2. Entonces por la demostración de laparte (i) se tiene que:
L(P1, f, α) ≤ L(P, f, α) y U(P, f, α) ≤ U(P2, f, α), (1)
por otro lado, por cuenta de la def. 3.7 se tiene que:
L(P, f, α) ≤ S(P, f, α) ≤ U(P, f, α) (2)
24
y combinando las ecuaciones 1 y 2 se tiene:
L(P1, f, α) ≤ L(P, f, α) ≤ S(P, f, α) ≤ U(P, f, α) ≤ U(P2, f, α)
llegando a establecerse finalmente:
L(P1, f, α) ≤ U(P2, f, α)
Definición 3.8 (Integrales Superior e Inferior) Supongase que α↗ en [a, b].La integral superior de Stieltjes de f respecto a α se define como:
(s)
∫ b
a
fdα = inf{U(P, f, α) : P ∈ ℘[a, b]}.
La integral inferior de Stieltjes se define como:
(i)
∫ b
a
fdα = sup{L(P, f, α) : P ∈ ℘[a, b]}
en ocasiones se escribe I(f, α) e I(f, α) para designar las integrales superi-
or e inferior. En particular la sumas superiores e inferiores se designan porU(P, f, α) y L(P, f, α) y se llaman las sumas superior e inferior de Riemann.
Las correspondientes integrales, designadas (s)∫ bafdx y (i)
∫ bafdx, se llaman
integrales superior e inferior de Riemann.
Teorema 3.12 Supongase que α↗ en [a, b]. Entonces I(f, α) ≤ I(f, α).
Demostración. Dado ε > 0, existe una partición P1 tal que
U(P1, f, α) < I(f, α) + ε
y por el teorema 3.11 se tiene que I(f, α)+ε es una cuota superior de todas las
sumas inferiores L(P, f, α). De esto surge que, como I(f, α) = sup{L(P, f, α) :P ∈ ℘[a, b]} entonces I(f, α) ≤ I(f, α) + ε, y como ε es arbitrario, implicaque I(f, α) ≤ I(f, α).
25
3.9. Propiedad Aditiva y Lineal de las Integrales Superiore Inferior
Las integrales superior e inferior tienen muchas de las propiedades de laintegral. Siempre que a < c < b en ellas se cumple que:
(s)
∫ b
a
fdα = (s)
∫ c
a
fdα+ (s)
∫ b
c
fdα
y análogamente:
(i)
∫ b
a
fdα = (i)
∫ c
a
fdα+ (i)
∫ b
c
fdα
Pero ciertas igualdades que se verifican con integrales se convierten en desigual-dades cuando se reemplazan aquellas por integrales superiores e inferiores. Unejemplo de esto es:
(s)
∫ b
a
(f + g)dα ≤ (s)
∫ b
a
fdα+ (s)
∫ b
a
gdα
y
(i)
∫ b
a
(f + g)dα ≥ (i)
∫ b
a
fdα+ (i)
∫ b
a
gdα
3.10. Condición de Riemann
Asi como se espera que la integral superior e inferior sean iguales tambiense debe esperar que las sumas superiores e inferiores sean tan próximas como sequiera. Por ello se busca las funciones f para las que la diferencia U(P, f, α)−L(P, f, α) pueda hacerse arbitrariamente pequeña.
Definición 3.9 Se dice que f satisface la condición de Riemann rspecto de αen [a, b] si para cada ε > 0, existe una partición Pε tal que si P es mas fina quePε implica:
0 ≤ U(P, f,α)− L(P, f, α) < ε
Teorema 3.13 Sea f una función que satisface la condición de Riemann re-specto de α en [a, b]. Entonces las tres afirmaciones que siguen son equivalentes:
i). f ∈ R(α) en [a, b].
ii). f satisface la condición de Riemann respecto de α en [a, b].
iii). I(f, α) = I(f, α)
26

Demostración. Se prueba que la parte (i) implica la parte (ii). Supongaseque (i) se verifica. Si α(b) = α(a), entonces (ii) se verifica trivialmente. Por lotanto supongase ahora que α(a) ≤ α(b). Dado ε > 0, se elige Pε tal que paratoda partición P más fina que Pε y todas las elecciones de tk y t′k en [xk−1, xk],se cumpla: ∣∣∣∣∣
n∑
k=1
f(tk)∆αk −A
∣∣∣∣∣<
ε
3
y ∣∣∣∣∣
n∑
k=1
f(t′k)∆αk −A
∣∣∣∣∣<
ε
3,
en donde A =∫ bafdα. combinando estas dos desigualdades , se obtiene:
∣∣∣∣∣
n∑
k=1
[f(tk)− f(t′k)]∆αk
∣∣∣∣∣<2
3ε
Ya que Mk(f)−mk(f) = sup{f(x)− f(x′) : x, x′ ∈ [xk−1, xk]}, y se tiene que
para cada h > 0 es posible elegir tk y t′k tales que
f(tk)− f(t′k) > Mk(f)−mk(f)− h
y eligiendo h = 13ε/[α(b)− α(a)] se puede escribir
U(P, f, α)− L(P, f, α) =n∑
k=1
[Mk(f)−mk(f)]∆αk
<n∑
k=1
[f(tk)− f(t′k)]∆αk + hn∑
k=1
∆αk
<2
3ε+
1
3ε/[α(b)− α(a)] · [α(b)− α(a)]
=2
3ε+
1
3ε = ε
de donde se obtiene que:
U(P, f, α)− L(P, f, α) <n∑
k=1
[f(tk)− f(t′k)]∆αk + hn∑
k=1
∆αk < ε
quedando que (i) implica (ii).
27
Se prueba que (ii) implica (iii). Se supone ahora que se verifica (ii). Dadoε > 0, existe una partición Pε tal que P más fina que Pε implica que U(P, f, α) <L(P, f, α) + ε. De donde se llega a verificar que para P se tiene:
I(f,α) ≤ U(P, f, α) < L(P, f, α) + ε ≤ I(f, α) + ε
lo que implica que I(f, α) < I(f, α) + ε para cada ε > 0 y por tanto I(f, α) ≤
I(f, α). Pero el terorema 3.12 prueba que I(f, α) ≥ I(f, α), y por consigu-iente I(f,α) = I(f, α). Con ésto se demuestra que (ii) implica (iii).
Se demostrará ahora que (iii) implica (i). Supongase que I(f, α) = I(f, α)
y sea A el valor común. Se probara que∫ bafdα existe y es igual a A. Dado ε > 0,
se elige P ′ε tal que U(P, f, α) < I(f,α)+ε para toda P mas fina que P ′ε. Se eligeasí mismo P ′′ε tal que L(P, f,α) > I(f, α)− ε para toda P mas fina que P ′′ε .Si Pε = P ′ε ∪ P ′′ε , se puede escribir:
I(f, α)− ε ≤ L(P, f, α) ≤ S(P, f, α) ≤ U(P, f, α) ≤ I(f, α) + ε
para cada P mas fina que Pε. Pero dado que I(f, α) = I(f, α) = A, se tiene
que |S(P, f, α)−A| < ε siempre que P sea mas fina que Pε. Probando que∫ bafdα existe y es igual a A. Por tanto (iii) implica (i).
3.11. Teoremas de Comparación
Teorema 3.14 Supongase que α ↗ en [a, b]. Si f ∈ r(α) y g ∈ R(α) en [a, b]
y si f(x) ≤ g(x) para todo x de [a, b], entonces se cumple que∫ baf(x)dα(x) ≤
∫ bag(x)dα(x)
Demostración. Como f(x) ≤ g(x) se cumple que para cada partición P,las correspondientes sumas de Riemann-Stieltjes satisfacen:
S(P, f, α) =n∑
k=1
f(tk)∆αk ≤n∑
k=1
g(tk)∆αk = S(P, g, α)
ya que α↗ en [a, b], resultando
∫ b
a
f(x)dα(x) ≤
∫ b
a
g(x)dα(x)
El teorema anterior implica que∫ bag(x)dα(x) ≥ 0 siempre que g(x) ≥ 0 y
α↗ en [a, b].
28

Teorema 3.15 Supongase que α ↗ en [a, b]. Si f ∈ R(α) en [a, b], entonces|f | ∈ R(α) en [a, b] y se cumple la desigualdad
∣∣∣∣∣
∫ b
a
f(x)dα(x)
∣∣∣∣∣≤
∫ b
a
|f(x)| dα(x).
Demostración. Utilizando la notación de la definición 3.7 se puede escribir:
Mk(f)−mk(f) = sup{f(x)− f(y) : x, y ∈ [xk−1, xk]}
Dado que ||f(x)| − |f(y)|| ≤ |f(x)− f(y)| siempre se satisface, se tiene que:
Mk(|f |)−mk(|f |) ≤Mk(f)−mk(f)
multiplicando ambos miembros por ∆αk:
Mk(|f |)−mk(|f |)∆αk ≤Mk(f)−mk(f)∆αk
y sumando respecto a k, se obtiene
n∑
k=1
[Mk(|f |)−mk(|f |)]∆αk ≤n∑
k=1
[Mk(f)−mk(f)]∆αk
n∑
k=1
Mk(|f |)∆αk −n∑
k=1
mk(|f |)∆αk ≤n∑
k=1
Mk(f)∆αk −n∑
k=1
mk(f)∆αk
U(P, |f | , α)− L(P, |f | , α) ≤ U(P, f, α)− L(P, f, α)
para cada partición P de [a, b]. Aplicando la condición de Riemann, se tiene
|f | ∈ R(α) en [a, b]. Haciendo |f | = g y aplicando el teorema 3.14 se tiene que∫ baf(x)dα(x) ≤
∫ bag(x)dα(x) resultando:
∫ b
a
f(x)dα(x) ≤
∫ b
a
|f(x)| dα(x)
Nota 3.1 Teniendo que α↗ en [a, b]. No se cumple que si |f | ∈ R(α) en [a, b]y se tiene la desigualdad
∣∣∣∣∣
∫ b
a
f(x)dα(x)
∣∣∣∣∣≤
∫ b
a
|f(x)| dα(x).
entonces f ∈ R(α) en [a, b].
29

Teorema 3.16 Supongase que α ↗ en [a, b]. Si f ∈ R(α) en [a, b], entoncesf2 ∈ R(α) en [a, b]
Demostración. Utilizando la notación de la definición 3.7, se tiene
Mk(f2) = [Mk(|f |)]
2 y mk(f2) = [mk(|f |)]
2
de donde se puede escribir:
Mk(f2)−mk(f
2) = [Mk(|f |)]2 − [mk(|f |)]
2
= [Mk(|f |) −mk(|f |)] [Mk(|f |) +mk(|f |)]
≤ 2M [Mk(|f |) −mk(|f |)] ,
donde M designa una cota superior de |f | en [a, b]. Aplicando la condición deRiemann se comprueba que f2 ∈ R(α) en [a, b]
Teorema 3.17 Supongase que α↗ en [a, b]. Si f ∈ R(α) en [a, b] y g ∈ R(α)en [a, b], entonces el producto f · g ∈ R(α) en [a, b].
3.12. Integradores de Variación Acotada
Toda función α de variación acotada en [a, b] se puede expresar con diferenciade dos funciones crecientes. Si α = α1−α2 es una descomposición y si f ∈ R(α1)y f ∈ R(α2), se tiene en virtud de la linealidad que f ∈ R(α). Pero no siempre escierto que si f ∈ R(α) se tenga que f ∈ R(α1) y f ∈ R(α2). Si f ∈ R(α) en [a, b],es posible encontrar fiunciones crecientes α1 y α2 tales que α = α1 − α2, pero
de modo que ni la integral∫ bafdα1 ni la integral
∫ bafdα2 existan. La dificultad
se halla en el hecho de que la descomposición α = α1 − α2 no es única. Pero esposible demostrar la existencia de una descomposición para la cual el reciprocoes verdadero, cuando α1 es la variación total de α y de α = α1 − α2.
Teorema 3.18 Supongase que α es de variación acotada en [a, b]. Se designarápor V (x) la variación total de α en [a, b] si a < x < b, con V (a) = 0. Supongaseque f está definida y acotada en [a, b]. Si f ∈ R(α) en [a, b], entonces f ∈ R(V )en [a, b].
Demostración. Si V (b) = 0, entonces V es constante y el resultado estrivial. Supongase que V (b) > 0, y que |f | ≤ M si x ∈ [a, b]. Como V escreciente, basta demostrar que f satisface la condición de Riemann respecto deV en [a, b].
Dado un ε > 0, se elige Pε tal que para todo refinamiento P y toda elecciónde puntos tk y t′k en [xk−i, xk] se verifica:
∣∣∣∣∣
n∑
k=1
[f(tk)− f(t′k)]∆αk
∣∣∣∣∣<
ε
4y V (b) <
n∑
k=1
|∆αk|+ε
4M
30

Y para P mas fina que Pε se establecen las dos desigualdades
n∑
k=1
[Mk(f)−mk(f)] [∆Vk − |∆αk|] <ε
2(1)
yn∑
k=1
[Mk(f)−mk(f)] |∆αk| <ε
2(2)
Para demostrar la desigualdad de la ec. 1, se ve que ∆Vk − |∆αk| ≥ 0 y por lotanto:
n∑
k=1
[Mk(f)−mk(f)] [∆Vk − |∆αk|] ≤ 2Mn∑
k=1
(∆Vk − |∆αk|)
= 2M
(
V (b)−n∑
k=1
|∆αk|
)
< 2M ·ε
4M=
ε
2.
Para demostrar la desigualdad de la ec. 2, sea
A(P ) = {k : ∆αk ≥ 0}, B(P ) = {k : ∆αk < 0},
y sea h = 14ε/V (b). Si k ∈ A(P ), se eligen tk y t′k tales que
f(tk)− f(t′k) > Mk(f)−mk(f)− h;
y si k ∈ B(P ), se eligen tk y t′k tales que
f(t′k)− f(tk) > Mk(f)−mk(f)− h.
Entonces
n∑
k=1
[Mk(f)−mk(f)] |∆αk| <∑
k∈A(P )
[f(tk)− f(t′k)] |∆αk|
+∑
k∈B(P )
[f(t′k)− f(tk)] |∆αk|+ hn∑
k=1
|∆αk|
=n∑
k=1
[f(tk)− f(t′k)] |∆αk|+ hn∑
k=1
|∆αk|
<ε
4+ hV (b) =
ε
4+
ε
4V (b)· V (b) =
ε
4+
ε
4=
ε
2
sumando las desigualdades de las ec. 2 y 2 resulta
31

n∑
k=1
[Mk(f)−mk(f)] [∆Vk − |∆αk|] +n∑
k=1
[Mk(f)−mk(f)] |∆αk| <ε
2+
ε
2
n∑
k=1
{[Mk(f)−mk(f)] [∆Vk − |∆αk|]}+ {[Mk(f)−mk(f)] |∆αk|} < ε
n∑
k=1
[Mk(f)−mk(f)] [∆Vk − |∆αk|+ |∆αk|] < ε
n∑
k=1
[Mk(f)−mk(f)]∆Vk < ε
n∑
k=1
Mk(f)∆Vk −n∑
k=1
mk(f)∆Vk < ε
U(P, f, V )− L(P, f, V ) < ε
Teorema 3.19 Sea α de variación acotada en [a, b] y supongase que f ∈ R(α)en [a, b]. Entonces f ∈ R(α) en [a, b] en cada subintervalo [c, d] de [a, b].
Demostración. Sea V (x) la variación total de α en [a, x], con V (a) = 0.Entonces α = V − (V −α), en donde tanto V como V −α son ambas crecientesen [a, b]. Por el teorema 3.18 f ∈ R(V ) en [a, b] y por lo tanto f ∈ R(V −α) en[a, b]. Por consiguiente si el teorema es verdadero para integrales crecientes setiene que f ∈ R(V ) en [c, d] y f ∈ R(V −α) en [c, d]. Luego f ∈ R(α) en [c, d].
De acuerdo con esto, es suficiente probar el teorema cuando α ↗ en [a, b].
Por el teorema 3.3 basta con probar que las integrales∫ cafdα y
∫ bafdα existen.
Supongase que a < c < b. Si P es una partición de [a, x], sea
∆(P, x) = U(P, f, α)− L(P, f, α),
la diferencia de las sumas superior e inferior en el intervalo [a, x]. Dado que
f ∈ R(α) en [a, b], la condición de Riemann se verifica y la integral∫ bafdα existe.
Por lo tanto, dado ε > 0, existe una partición Pε de [a, b] tal que ∆(B, b) < εsi P es más fina que Pε. Se puede suponer que c ∈ Pε. Los puntos de Pε quepertenecen a [a, c] definen una partición P ′ε de [a, c]. si P ′ es una partición de[a, c] mas fina que P ′ε, entonces P = P ′ ∪ Pε es una partición de [a, b] obtenidajuntando los puntos de P ′ con los puntos que Pε posee en [c, b]. La suma definidapor ∆(P ′, c) contiene sólo parte de los terminos de la suma definida por ∆(P, b).Como cada término es mayor o igual a cero y dado que P es más fina que Pε,se tiene
∆(P ′, c) ≤ ∆(P, b) < ε
Lo que indica que P ′ mas fina que P ′ε implica ∆(P ′, c) < ε. Por lo tanto, f
satisface las condiciones de Riemann en [a, c] y∫ cafdα existe.
32
Teorema 3.20 Supongase que f ∈ R(α) y g ∈ R(α) en [a, b], en donde α ↗en [a, b]. Se definen
F (x) =
∫ b
a
f(t)dα(t)
y
G(x) =
∫ x
a
g(t)dα(t) si x ∈ [a, b]
Entonces f ∈ R(G), g ∈ r(F ), y el producto f · g ∈ R(α) en [a, b] y se tiene:
∫ b
a
f(x)g(x)dα(x) =
∫ b
a
f(x)dG(x)
=
∫ b
a
g(x)dF (x)
Demostración. Por el teorema 3.17 se tiene que∫ baf ·gdα existe. Para cada
partición P de [a, b] se tiene
S(P, f,G) =n∑
k=1
f(tk)
∫ xk
xk−1
g(t)dα(t) =n∑
k=1
∫ xk
xk−1
f(tk)g(t)dα(t)
y ∫ b
a
f(x)g(x)dα(x) =n∑
k=1
∫ xk
xk−1
f(t)g(t)dα(t)
De donde, si Mg = sup{|g(x)| : x ∈ [a, b]}, se tiene
∣∣∣∣∣S(P, f,G)−
∫ b
a
f · gdα
∣∣∣∣∣=
∣∣∣∣∣
n∑
k=1
∫ xk
xk−1
f(tk)g(t)dα(t)−n∑
k=1
∫ xk
xk−1
f(t)g(t)dα(t)
∣∣∣∣∣
=
∣∣∣∣∣
n∑
k=1
∫ xk
xk−1
{f(tk)− f(t)} g(t)dα(t)
∣∣∣∣∣
≤ Mg
n∑
k=1
∫ xk
xk−1
|f(tk)− f(t)|dα(t)
≤ Mg
n∑
k=1
∫ xk
xk−1
[Mk(f)−mk(f)] dα(t)
= Mg{U(P, f, α)− L(P, f,α)}
Puesto que f ∈ R(α), para cada ε > 0 existe una partición Pε tal que P másfina que Pε implica U(p, f, α)−L(p, f, α) < ε. Esto demuestra que f ∈ R(G) en
[a, b] y que∫ baf · gdα =
∫ bafdG.
33

Para cada partición P de [a, b] se tieneS(P, g, F ) =∑nk=1 g(tk)
∫ xkxk−1
f(t)dα(t) =
∑nk=1
∫ xkxk−1
g(tk)f(t)dα(t)y
∫ b
a
g(x)f(x)dα(x) =n∑
k=1
∫ xk
xk−1
g(t)f(t)dα(t)
De donde, si Mf = sup{|f(x)| : x ∈ [a, b]}, se tiene
∣∣∣∣∣S(P, g, F )−
∫ b
a
f · gdα
∣∣∣∣∣=
∣∣∣∣∣
n∑
k=1
∫ xk
xk−1
g(tk)f(t)dα(t)−n∑
k=1
∫ xk
xk−1
f(t)g(t)dα(t)
∣∣∣∣∣
=
∣∣∣∣∣
n∑
k=1
∫ xk
xk−1
{g(tk)− g(t)} f(t)dα(t)
∣∣∣∣∣
≤ Mf
n∑
k=1
∫ xk
xk−1
|g(tk)− g(t)| dα(t)
≤ Mf
n∑
k=1
∫ xk
xk−1
[Mk(g)−mk(g)]dα(t)
= Mf{U(P, g, α)− L(P, g, α)}
Puesto que g ∈ R(α), para cada ε > 0 existe una partición Pε tal que P másfina que Pε implica U(p, g, α)−L(p, g, α) < ε. Esto demuestra que g ∈ R(F ) en
[a, b] y que∫ baf · gdα =
∫ bagdF.
Este teorema es válido también si α es una función de variación acotada en[a, b].
3.13. Condición Suficiente Para la Existencia de Las Inte-grales de Riemann-Stieltjes
Teorema 3.21 Si f es continua en [a, b] y si α es de variación acotada en[a, b], entonces f ∈ R(α) en [a, b]
Demostración. Es suficiente demostrar el teorema para α ↗ con α(a) <α(b). La continuidad de f en [a, b] implica la continuidad uniforme, esto es dadoε > 0 existe un δ > 0, que depende solo de ε, tal que
|x− y| < δ implica |f(x)− f(y)| <ε
A,
en donde A = 2 [α(b)− α(a)]. Si Pε es una partición de norma ‖Pε‖ < δ,entonces para P más fina que Pε se tendrá
Mk(f)−mk(f) ≤ε
A,
34

debido a que Mk(f) −mk(f) = sup{f(x) − f(y) : x, y ∈ [xk−1, xk]}. Multipli-cando la desigualdad por ∆αk y sumando se tiene:
n∑
k=1
{Mk(f)−mk(f)}∆αk =n∑
k=1
Mk(f)∆αk −n∑
k=1
mk(f)∆αk
= U(P, f, α)− L(P, f,α)
≤ε
A
n∑
k=1
∆αk
=ε
2 [α(b)− α(a)]· α(b)− α(a)
=ε
2< ε
quedando verificada la condición de Riemann. Por lo tanto, f ∈ R(α) en [a, b].
3.14. Condiciones Necesarias para la Existencia de las In-tegrales de Riemann-Stieltjes
Teorema 3.22 Supongase que α↗ en [a, b] y sea a < c < b.
i). Supongase que tanto α como f son discontinuas por la derecha de x = c;esto es, suponer que existe un ε > 0 tal que para cada δ > 0 existen valorestanto de x como de y en el intervalo (c, c+ δ) para los que
|f(x)− f(c)| ≥ ε
y|α(y)− α(c)| ≥ ε
Entonces la integral∫ baf(x)dα(x) no existe.
ii). Supongase que tanto α como f son discontinuas por la izquierda de x = c;esto es, que existe un ε > 0 tal que para cada δ > 0 existen valores tantode x como de y en el intervalo (c− δ, c) para los que
|f(c)− f(x)| ≥ ε
y|α(c)− α(y)| ≥ ε
Entonces la integral∫ baf(x)dα(x) no existe.
35
Demostración. Sea P una partición de [a, b] que contenga al punto c co-mo punto de partición. Se considera la diferencia U(P, f, α) − L(P, f, α) =
∑nk=1 [Mk(f)−mk(f)]∆αki) Si α y f son discontinuas por la derecha de x = c y el intervalo i-ésimo
contiene al punto c como extremo izquierdo, entonces
U(P, f, α)− L(P, f, α) ≥ [Mk(f)−mk(f)] [α(xi)− α(c)] ,
ya que cada término de la suma es mayor que cero. Si c es una discontinuidadpor la derecha común, se puede suponer que el punto xi se ha elegido de talmanera que α(xi) − α(c) ≥ ε. Por lo cual, las hipótesis del teorema implicanMk(f)−mk(f) ≥ ε. Luego,
U(P, f, α)− L(P, f, α) ≥ ε2,
y la condición de Riemann no puede verificarse.ii) Si α y f son discontinuas por la izquierda de x = c y el intervalo i-ésimo
contiene al punto c como extremo derecho, entonces
U(P, f, α)− L(P, f, α) ≥ [Mk(f)−mk(f)] [α(c)− α(xi)]
ya que cada término de la suma es mayor que cero. Si c es una discontinuidadpor la izquierda común, se puede suponer que el punto xi se ha elegido de talmanera que α(c) − α(xi) ≥ ε. Por lo cual, las hipótesis del teorema implicanMk(f)−mk(f) ≥ ε. Luego,
U(P, f, α)− L(P, f, α) ≥ ε2,
y la condición de Riemann no puede verificarse.
3.15. Teoremas de ValorMedio para las Integrales de Riemann-Stieltjes
Si bien es cierto que ls integrales aparecen en infinidad de problemas, sonrelativamente pocos los casos en que el valor medio de la integral puede obtenerseexplicitamente. Pero en muchos de los casos basta con encontrar una estimacióndel valor medio más que el valor exacto, por lo que a continuación se enunciaránalgunos teoremas que ayudan a obtener estimaciones del valor medio.
Teorema 3.23 (Primer Teorema del Valor Medio) Supongase que α ↗en [a, b] y que M y m designan respectivamente, el sup y el inf del conjunto{f(x) : x ∈ [a.b]}. entonces existe un numero real c que satisface m ≤ c ≤ Mtal que ∫ b
a
f(x)dα(x) = c
∫ b
a
dα(x) = c [α(b)− α(a)]
En particular, si f es continua en [a, b], entonces c = f(x0) para cierto valor xode [a, b].
36
Demostración. Si α(a) = α(b), el teorema se verifica trivialmente, debidoa que ambos miembros son cero. Supongase que α(a) ≤ α(b). Dado que todaslas sumas superiores e inferiores se verifican:
m [α(b)− α(a)] ≤ L(P, f, α) ≤ U(P, f, α) ≤M [α(b)− α(a)]
la integral∫ bafdα debe estar comprendida entre ambas cotas. Por consiguiente,
el coeficiente c =(∫ b
afdα/
∫ badα)
est comprendido entre m y M . Si f es con-
tinua en [a, b], el teorema del valor medio hace que c = f(x0) para algun x0 de[a, b]
Teorema 3.24 (Segundo Teorema de Valor Medio) Supongase que α escontinua y que f ↗ en [a, b]. Entonces existe un punto x0 en [a, b] tal que+
∫ b
a
f(x)dα(x) = f(a)
∫ x0
a
dα(x) + f(b)
∫ b
x0
dα(x)
Demostración. Por el teorema 3.4 se tiene
∫ b
a
f(x)dα(x) = f(b)α(b)− f(a)α(a)−
∫ b
a
α(x)df(x)
aplicando el teorema 3.23 a la integral de la derecha se tiene
∫ b
a
f(x)dα(x) = f(b)α(b)− f(a)α(a)−
∫ b
a
α(x)df(x)
= f(b)α(b)− f(a)α(a)− α(x0) [f(b)− f(a)]
= f(b)α(b)− f(a)α(a)− α(x0)f(b) + f(a)α(x0)
= f(a) [α(x0)− α(a)] + f(b) [α(b)− α(x0)]
en donde x0 ∈ [a, b].
3.16. La Integral como una Función de Intervalo
Si f ∈ R(α) en [a, b] y si α es de variación acotada, entonces por el teorema3.19 la integral
∫ xafdα existe para todo x de [a, b] y puede estudiarse como una
función de x.
Teorema 3.25 Sea α una función de variación acotada en [a, b] y supongaseque f ∈ R(α) en [a, b]. Si se define F por medio de la ecuación:
F (x) =
∫ x
a
fdα, si x ∈ [a, b]
Entonces se tiene que:
i). F es de variación acotada en [a, b].
37
ii). En cada uno de los puntos en los que α es continua, F también lo es.
iii). Si α↗ en [a, b], la derivada F ′(s) existe en cada punto x de (a, b) en queα′(x) exista y f sea continua. Para tales x se tiene que
F ′(x) = f(x)α′(x).
Demostración. Es suficiente suponer que α ↗ en [a, b]. Si x �= y, por elteorema 3.23 se tiene
F (y)− F (x) =
∫ y
a
fdα−
∫ x
a
fdα
=
∫ y
x
fdα = c [α(y)− α(x)]
en donde m ≤ c ≤ M, resultando (i) que F es de variación acotada en [a, b].y(ii) que en cada uno de los puntos en los que α es continua, F también lo es y sise divide por y − x se puede observar que c −→ f(x) cuando y −→ x quedandodemostrado (iii).
Teorema 3.26 Sean f ∈ R(α) y g ∈ R(α) en [a, b], y sean
F (x) =
∫ x
a
fdt, G(x) =
∫ x
a
gdt si x ∈ [a, b].
Entonces F y G son funciones contínuas y de variación acotada en [a, b]. Ade-más, f ∈ R(G) y g ∈ R(F ) en [a, b], y se tiene
∫ b
a
f(x)g(x)dx =
∫ b
a
f(x)dG(x) =
∫ b
a
g(x)dF (x)
Demostración. Ya que f ∈ R(α) y g ∈ R(α) en [a, b] y por las definicionesde F (x) y de G(x) aplicando el teorema 3.25 en las partes (i) y (ii) se tieneque F y G son de variación acotada en [a, b].
Por otro lado haciendo α(x) = x se aplican las condiciones del teorema 3.18
obteniendose finalmente que∫ baf(x)g(x)dx =
∫ baf(x)dG(x) =
∫ bag(x)dF (x)0
38
4. Integral de Lebesgue
Este capítulo tiene por objetivo presentar el concepto de integral de Lebesguey los principales teoremas que la sustentan, con el objeto de establecer una com-paración entre esta integral y la integral de Riemann. Se presentan los teoremasomitiendo el desarrollo detallado de sus demostraciones por cuestiones prácticas,lsa demostrasciones aui mostradas se tomorano en su mayoria de [TA77].
La integral de Lebesgue se pueda presentar inicialmente como una extensiónde la integral de Riemann, y por lo tanto son de esperarse algunas característicasmuy importantes: por una parte, que el valor obtenido mediante una integralde Riemann sea el mismo que el obtenido mediante una integral de Lebesguecorrespondiente. Y por otra parte, que la integral de Lebesgue provea algunasventajas adicionales a la integral de Riemann ya que se ha tomado como unaextensión de ella.
En el presente capítulo se expondrán los teoremas mas importantes relativosa la integral de Lebesgue. Para ello, se definirá la integral de Lebesgue paralas funciones escalonadas, definiendo luego la integral de funciones superiores.Posteriormente se generalizará definiendo la clase más general de las funcionesintegrables mediante Lebesgue.
En todo caso, a lo largo del capítulo se supondrán los conocimientos básicosde teoría de la medida, algunos de los cuales se podrán consultar en el capítulode Preliminares.
4.1. Funciones Escalonadas, Sucesión de Funciones Escalon-adas y su Integral
Definición 4.1 (Función escalonada) Una función s definida en un inter-valo compacto [a, b], se llama función escalonada si existe una partición P ={x0, x1, ..., xn} de [a, b] tal que s es constante en cada subintervalo abierto, porejemplo
s(x) = ck si x ∈ (sk−1, xk) ,
Una función escalonada es integrable bajo Riemann en cada subintervalo[xk−1, xk] y su integral sobre el mismo viene dada por
∫ xk
xk−1
s (x) dx = ck (xk − xk−1) ,
independientemente de los valores de s en los extremos. Por lo tanto, la integralde Riemann de s en [a, b] es:
∫ b
a
s (x) dx =n∑
k=1
ck (xk − xk−1) (1)
Definición 4.2 (Función escalonada en I) Supongase que I designa un in-tervalo cualquiera, que puede ser por tanto acotado, no acotado, abierto, cerrado
39

o semiabierto. Una función s es una función escalonada en I si existe un subin-tervalo compacto [a, b] de I en el que s sea una función escalonada en [a, b],si además s(x) = 0 para x ∈ I − [a, b]. La integral de s en I, designada por∫Is (x) dx o por
∫Is, es la integral de s en [a, b], dada por 1
Existen muchos intervalos compactos fuera de los cuales la función s se anula,pero la integral de s es independiente de la elección de [a, b].
La suma y el producto de dos funciones escalonadas es una función escalona-da. A partir de la definición 4.2 se puede establecer las propiedades de la integralde funciones escalonadas, así:
∫
I
(s+ t) =
∫
I
s+
∫
I
t
∫
I
cs = c
∫
I
s Para toda constante c
∫
I
s ≤
∫
I
t si s (x) ≤ t (x) para todo x de I.
Si se expresa I como la reunión de un conjunto finito de subintervalos, I =⋃p
r=1[ar, br], en la que los subintervalos son disyuntos dos a dos, entonces:
∫
I
s (x) dx =
p∑
r=1
∫ br
ar
s (x) dx
Definición 4.3 (Sucesión creciente de funciones) Una sucesión de funcionesreales {fn} definida en un conjunto S es creciente en S si
fn (x) ≤ fn+1 (x) para todo x de S y todo n
Definición 4.4 (Sucesión decreciente de funciones) Una sucesión de fun-ciones reales {fn} definida en un conjunto S es decreciente en S si
fn (x) ≥ fn+1 (x) para todo x de S y todo n
Nota 4.1 Un subconjunto T de R tiene medida 0 si para cada ε > 0, es posiblerecubrir T por medio de una colección numerable de intervalos, la suma de cuyaslongitudes es menor que ε. Se dice que una propiedad se verifica casi en todo unsubconjunto S, y se escribe: c.e.t. S, si se verifica en todo S salvo en un conjuntode medida 0
Teorema 4.1 Sea {sn} una sucesión decreciente de funciones escalonadas nonegativas ral que sn ↘ 0 c.e.t.I. Entonces
lımn→∞
∫
I
sn = 0
40

Demostración. Se escribe:∫
I
sn =
∫
A
sn +
∫
B
sn
en donde tanto A como B es la reunión finita de intervalos. El conjunto A seobtiene eligiendo aquellos intervalos en los que el integrando es pequeño cuandon es suficientemente grande, mientras que en B el integrando no necesita serpequeño, pero la suma de las longitudes de sus intervalos sí será pequeña.
Se puede ver que existe un intervalo compacto [a, b] fuera del cual s1 seanula. Dado que 0 ≤ sn (x) ≤ s1 (x) para todo x de I,cada sn se anula fuerade [a, b]. Por otra parte, sn es constante en cada subintervalo abierto de unadeterminada partición [a, b]. Se puede designar como Dn al conjunto de los
extremos de estos subintervalos, y se puede tomar D =⋃∞
n=1Dn. Debido a que
cada Dn es un conjunto finito, la reunión D es numerable y por lo consiguientetiene medida cero. Sea E el conjunto de puntos de [a, b] en los que la sucesión{sn} no converge hacia 0. Por hipótesis E tiene medida cero, luego el conjuntoF = D∪E también tendrá medida 0. Por lo tanto, dado ε > 0 se puede recubrirF por medio de una colección numerable de intervalos abiertos F1, F2, ..., lasuma de cuyas longitudes es menor que ε.
Se supone ahora que x ∈ [a, b]−F . Entonces x /∈ E, y se tiene que sn (x)→ 0cuando n → ∞. Por consiguiente existe un entero N = N (x) tal que sn < ε.Por otro lado si x /∈ D entonces x es interior a alguno de los intervalos en loscuales sN es constante. Luego existe un intervalo abierto B (x) tal que sn (t) < εpara todo t de B (x) , y como {sn} es decreciente, se tiene
sn (t) < ε para todo n ≥ N y para todo t de B (x) . (1)
Si se examina el conjunto de todos los intervalos B (x) obtenidos cuando xrecorre [a, b] − F , junto con los intervalos F1, F2,..., forman un recubrimientoabierto de [a, b]. Puesto que [a, b] es compacto existe un subrecubrimiento finito[GR01]:
[a, b] ⊆
p⋃
i=1
B (xi) ∪
q⋃
r=1
Fr.
Se define ahora N0 como el mayor de los enteros N (x1) , ..., N (xp) . De 1 sededuce que
sn (t) < ε para todo n ≥ N0 y todo t de
p⋃
i=1
B (xi) . (2)
Se definen A y B como sigue:
B =
q⋃
r=1
Fr, A = [a, b]−B.
41

y por lo tanto, se puede ver que A es una reunión finita de intervalos disyuntosy que ∫
I
sn =
∫ b
a
sn =
∫
A
sn +
∫
B
sn.
Para obtener el resultado, se calcularán las integrales sobre A y sobre B. Enprimera instancia se evaluará la integral sobre B. Para ello, se define M comouna cota superior de s1 en [a, b]. Como la sucesión {sn} es decreciente, se tieneque sn (x) ≤ s1 (x) ≤M para todo x de [a, b]. Dado que la suma de las longitudesde los intevalos que pertenecen a B es menor que ε, se concluye que:
∫
b
sn ≤Mε (3)
Se evaluará ahora la integral sobre A. Como A ⊆
p⋃
i=1
B (xi), la desigualdad 2
prueba que sn (x) < ε si x ∈ A y n ≥ N0. La suma de las longitudes de losintervalos de A no excede a b− a, y por tanto:
∫
a
sn ≤ (b− a) ε si n ≥ N0. (4)
Reuniendo los resultados de las ec.3 y 4 se tiene que:∫
I
sn =
∫
A
sn +
∫
B
sn
≤ Mε+ (b− a) ε
≤ (M + b− a) ε
si n ≥ N0, con lo cual queda demostrado que
lımn→∞
∫
I
sn = 0
Teorema 4.2 Sea {tn} una sucesión de funciones escalonadas en un intervaloI tal que :
i). Existe una función f tal que tn ↗ f c.e.t.I.
ii). La sucesión{∫Itn}converge.
Entonces toda función escalonada t para la cual t (x) ≤ f (x) c.e.t. I verificaque: ∫
I
t ≤ lımn→∞
∫
I
tn
42

Demostración. Para realizar esta demostración, se puede definir una nuevasucesión de funciones escalonadas no negativas {sn} en I así:
sn (x) =
{t (x)− tn (x) si t (x) ≥ tn (x) ,0 si t (x) ≤ tn (x) .
de tal forma que sn (x) = max {t (x)− tn (x) , 0} . Luego {sn} es decreciente en
I puesto que {tn} es creciente y sn (x)→ max {t (x)− f (x) , 0} c.e.t. I. Perot (x) ≤ f (x) c.e.t. I, y por tanto sn ↘ 0 c.e.t. I. Luego por el teorema 4.1limn→∞
∫Isn = 0. Pero sn(x) ≥ t(x)− tn (x) para todo x de I, y se tiene
∫
I
sn ≥
∫
I
t−
∫
I
tn
Luego si n→∞ se obtiene finalmente:
∫
I
t ≤ lımn→∞
∫
I
tn
4.2. Funciones Superiores y sus Integrales
Definición 4.5 (Función Superior) Una función real f definida en un in-tervalo I se llama función superior en I, y se escribe f ∈ U (I), si existe unasucesión creciente de funciones escalonadas {sn} tal que:
i). sn ↗ f c.e.t. I
ii). limn→∞
∫Isn es finito
En este caso, se dice que la sucesión {sn} genera a f . La integral de f en Ise define mediante la ecuación
∫
i
f = lımn→∞
∫
I
sn
Puesto que{∫isn}es una sucesión de números reales creciente, la condición
(i) es igual a afirmar que esta sucesión está acotada superiormente
Teorema 4.3 Supongase que f ∈ U (I) y sean {sn} y {tm} dos sucesiones quegeneran a f . Entonces se cumple que:
lımn→∞
∫
I
sn = lımm→∞
∫
I
tm.
43
Demostración. La sucesión {tm} satisface las hipótesis (i) y (ii) del teore-ma 4.2. Además para cada n se tiene que
sn (x) ≤ f (x) c.e.t. I.
De donde se puede verificar que para todo n:
∫
I
t ≤ lımn→∞
∫
I
tn →
∫
I
s ≤ lımn→∞
∫
I
tm
y por lo tanto se tiene que:
lımn→∞
∫
I
sn ≤ lımn→∞
∫
I
tm (1)
Por otra parte, la sucesión {sn} también satisface las hipótesis (i) y (ii) del
teorema 4.2. Además para cada m se tiene que
tm (x) ≤ f (x) c.e.t. I.
De donde se puede verificar para todo n, que:
∫
I
t ≤ lımn→∞
∫
I
tn →
∫
I
t ≤ lımn→∞
∫
I
sn
y análogamente al caso anterior se tiene:
lımn→∞
∫
I
tm ≤ lımn→∞
∫
I
sn (2)
Combinando las ecuaciones 1 y 2 se tiene que:
lımn→∞
∫
I
sn = lımm→∞
∫
I
tm.
4.2.1. Propiedades de la Integral de Funciones Superiores
Teorema 4.4 Supóngase que f ∈ U (I) y que g ∈ U (I). Entonces:
i). Propiedad de Linealidad 1: (f + g) ∈ U (I) y por lo tanto∫I(f + g) =∫
If +
∫Ig
44

ii). Propiedad de Linealidad 2: cf ∈ U (I) para cada constante c ≥ 0, yse tiene que
∫Icf = c
∫If
iii). Propiedad de Monotonía:∫If ≤
∫Ig si f (x) ≤ g (x) c.e.t.I
Las demostraciones de estas propiedades, así como del teorema 4.5 se puedenencontrar en [TA77][BA01] y [WM78]. Estas propiedades establecen un com-portamiento lineal para la integral de Lebesgue similar al comportamiento de laintegral de Riemann-Stieltjes. La propiedad de monotonía tiene la característicaimportante que se cumple cuando la restricción se cumple casi en todo el con-junto, soportando alguinos puntos finitos donde esta restricción (f (x) ≤ g (x))no se cumple. El siquiente teorema es de esperarse si se considera la propiedadde monotonía:
Teorema 4.5 Si f ∈ U (I) y g ∈ U (I) , y si f (x) = g (x) casi para todo x enI, entonces
∫If =
∫Ig
Definición 4.6 (max, min y propiedades) Sean f y g funciones reales definidasen I. Se definen max (f, g) y mın (f, g) como las funciones cuyo valor en cada xde I es, respectivamente, max {f (x) , g (x)} y mın {f (x) , g (x)} . Las funcionesmax y mın tienen las siguientes propiedades:
i). max (f, g) +mın (f, g) = f + g.
ii). max (f + h, g + h) = max (f, g) + h y mın (f + h, g + h) = mın (f, g) + h.
iii). Si fn ↗ f c.e.t. I, y si gn ↗ g c.e.t. I, entonces
max (fn, gn)↗ max (f, g) c.e.t.I y mın (fn, gn)↗ mın (f, g) c.e.t.I
Teorema 4.6 Si f ∈ U (I) y g ∈ U (I) , entoncesmax(f, g) ∈ U (I) ymın(f, g) ∈U (I)
Demostración. Sean {sn} y {tn} sucesiones de funciones escalonadas, lascuales generan f y g respectivamente. Sean un = max (sn, tn) , vn = mın(sn, tn).Entonces un y vn son funciones escalonadas tales que un ↗ max (f, g) y vn ↗mın (f, g) c.e.t. I
Para probar que mın (f, g) ∈ U (I) es suficiente probar que la sucesión{∫Ivn}
es acotada superiormente. Para ello, se observa que vn = mın (sn.tn) ≤
f, c.e.t. I, luego∫Ivn ≤
∫If. Por consiguiente la sucesión
{∫Ivn}
converge yse cumple mın(f, g) ∈ U (I) .
45
Para probar que max(f, g) ∈ U (I) basta con ver que la sucesión{∫Iun}
también converge ya que por la propiedad (i) de la definición 4.6, se tiene queun = sn + tn − vn y por tanto
∫
I
un =
∫
I
sn +
∫
I
tn −
∫
I
vn →
∫
I
sn +
∫
I
tn −
∫
I
mın (f.g)
de donde se concluye que max(f, g) ∈ U (I)
Teorema 4.7 Supongase que el intervalo I es la reunión de dos subintervalos I1y I2 que carecen de puntos interiores comunes. Esto es, I = I1∪I2. Si f ∈ U (I)y además f ≥ 0 c.e.t. I, entonces f ∈ U (I1) , f ∈ U (I2) , y se cumple que:
∫
I
f =
∫
I1
f +
∫
I2
f
Demostración. Sea {sn} es una sucesión creciente de funciones escalonadasque generan f en I. Sea s+n (x) = max {sn (x) , 0} para cada x de I. Entonces{s+n } es una sucesión creciente de funciones escalonadas no negativas que gen-eran f en I. (ya que f ≥ 0). Además, en cada subintervalo J de I se tiene∫Js+n ≤
∫Is+n ≤
∫If , por lo que {s+n } genera f en J . Además, se tiene que:
∫
I
s+n =
∫
I1
s+n +
∫
I2
s+n ,
al hacer n→∞ se tiene finalmente:
∫
I
f =
∫
I1
f +
∫
I2
f
4.3. La Clase de las Funciones Integrables de Lebesgue
Existe un aspecto indeseable en el comportamiento de las funciones superi-ores que afecta la integrabilidad: si u y v son funciones superiores, la diferenciau−v no es necesariamente una función superior. Para eliminar este problema, sedefine la clase de las funciones integrables definidas en un intervalo I tal comose expone a continuación.
Definición 4.7 (Clase L(I) de las Funciones Integrables de Lebesgue)Se designará por L (I) al conjunto de todas las funciones f de la forma f = u−v,
46

en donde u ∈ U (I) y v ∈ U (I). Cada función f de L (I) se llama función in-tegrable de Lebesgue en I, y su integral se define por la ecuación
∫
I
f =
∫
I
u−
∫
I
v
Toda función f ∈ L (I) se puede escribir como diferencia de dos funciones
superiores y no necesariamente de forma única.
Teorema 4.8 Sean u, v, u1 y v1 funciones de U (I) tales que u− v = u1 − v1.Entonces ∫
I
u−
∫
I
v =
∫
I
u1 −
∫
I
v1
Demostración. Las funciones u+ v1 y u1 + v pertenecen a U (I) y
u− v = u1 − v1.
u− v + v1 = u1.
u+ v1 = u1 + v
Luego por la parte (i) del teorema 4.4 se tiene que
∫
I
u+
∫
I
v1 =
∫
I
u1 +
∫
I
v
y reordenando se obtiene:
∫
I
u−
∫
I
v =
∫
I
u1 −
∫
I
v1
4.4. Propiedades Generales de la Integral de Lebesgue
Teorema 4.9 Se suponen f ∈ L (I) y g ∈ L (I). Entonces se tiene que:
i). (af + bg) ∈ L (I) para cada par de numeros reales a y b, y
∫
I
(af + bg) = a
∫
I
f + b
∫
I
g.
ii).∫If ≥ 0 si f (x) ≥ 0 c.e.t. I.
47
iii).∫If ≥
∫Ig si f (x) ≥ g (x) c.e.t. I.
iv).∫If =
∫Ig si f (x) = g (x) c.e.t. I.
Demostración. Para demostrar (i) se tiene que aplicando la parte (i) delteorema 4.4 se obtiene
∫
I
(af + bg) =
∫
I
af +
∫
I
bg
y aplicando la parte (ii) del teorema 4.4 en cada una de los componentes de la
suma se llega a:
∫
I
(af + bg) =
∫
I
af +
∫
I
bg
= a
∫
I
f + b
∫
I
g
Para demostrar (ii) se toma f = u − v, en donde u ∈ U (I) y v ∈ U (I).Entonces u (x) ≥ v (x) c.e.t. I y por la parte (iii) del teorema 4.4, se tiene que∫iu ≥
∫Iv, resultando ∫
i
f =
∫
i
u−
∫
I
v ≥ 0
Para demostrar (iii) se aplica (ii) del mencionado teorema 4.4 a f − g y setiene ∫
I
f ≥
∫
I
g si f (x) ≥ g (x) c.e.t.I
Para demostrar (iv) basta considerar que el tener f (x) = g (x) c.e.t. I.equivale a tener f (x) ≤ g (x) c.e.t. I. y f (x) ≥ g (x) c.e.t. I. simultáneamenteaplicando la parte (iii) a cada una de las desigualdades se obtiene
∫If ≥
∫Ig y∫
If ≤
∫Ig que al combinarlas resulta
∫
I
f =
∫
I
g si f (x) = g (x) c.e.t.I.
48

Definición 4.8 (Parte Positiva y Negativa de f) Sea f una función real,y sean f+ y f− sus partes positiva y negativa respectivamente. Entonces, f+ yf− se definen por medio de las ecuaciones
f+ = max (f, 0) , f− = max (−f, 0) .
En donde f+ y f− son funciones no negativas y
f = f+ − f−, |f | = f+ + f−.
Teorema 4.10 Si f y g son funciones de L (I) , entonces tambien lo son f+,f−, |f | , max (f, g) y mın (f, g) . Además
∣∣∣∣
∫
I
f
∣∣∣∣ ≤∫
I
|f |
Demostración. Sea f = u− v, en donde u ∈ U (I) y v ∈ U (I) .Entonces
f+ = max (u− v, 0) = max (u, v)− v
por el teorema 4.6 se tiene que max (u, v) ∈ U (I) y v ∈ U (I), luego f+ ∈ L (I)
, dado que según la definición 4.8 f = f+ − f− se tiene que f− = f+ − f, dedonde f− ∈ L (I) , como |f | = f+ + f− y tanto f+ ∈ L (I) como f− ∈ L (I)resulta que |f | ∈ L (I)
Ya que − |f (x)| ≤ f (x) ≤ |f (x)| para todo x de I se tiene
−
∫
i
|f | ≤
∫
I
f ≤
∫
I
|f | ,
lo que prueba que ∣∣∣∣
∫
I
f
∣∣∣∣ ≤∫
I
|f |
Por último, se puede escribir:
max (f, g) =1
2(f + g + |f − g|)
mın (f + g) =1
2(f + g − |f − g|)
en donde como f , g, |f − g| son funciones de L (I) resulta que max (f, g) ymın (f, g) son funciones de L (I)
49

Teorema 4.11 (Propiedades de Funciones Integrables por Lebesgue)Supongase que f ∈ L (I) . Entonces se tienen las siguientes propiedades:
i). Invariancia por traslaciones. Si g (x) = f (x− c) para x pertenecientesa I + c, entonces g ∈ L (I + c) , y
∫
I+c
g =
∫
I
f
ii). Comportamiento de la integral bajo una dilatación o una contrac-ción. Si g (x) = f (x/c) para x perteneciente a cI, donde c > 0, entoncesg ∈ L (c) I y ∫
cI
g = c
∫
I
f.
iii). Invariancia por reflexion. Si g(x) = f (−x) para x pertenecientes a−I, entonces g ∈ (−I) y ∫
−I
g =
∫
I
f
Demostración. El método de demostración es directo, solo requiere susti-tuir adecuadamente los valores como sigue: se verifican primero los teoremas 4.1y 4.2 para funciones escalonadas, luego se procede a verificar los teoremas 4.3,4.4, 4.5 y 4.6 para integrales superiores y por últimos se verifican los teoremas4.8 para funciones integrables de Lebesgue, obteniéndose como resultado quelas propiedades (i) , (ii) y (iii) cumplen las condiciones de dichos teoremas.
Teorema 4.12 Sea I un intervalo unión de dos subintervalos I = I1 ∪ I2, endonde I1 e I2 no tienen puntos interiores comunes.
i). Si f ∈ L (I) , entonces f ∈ L (I1) , f ∈ L (I2) , y∫
I
f =
∫
I1
f =
∫
I2
f
ii). Supongase que f1 ∈ L (I1) , f2 ∈ L (I2) , y sea f una función definida en I
f (x) =
{f1 (x) si x ∈ I1f2 (x) si x ∈ I − I1
Entonces f ∈ L (I) y∫If =
∫I1f1 +
∫I2f2
50

Demostración. Sea f = u − v, donde u ∈ U (I) y v ∈ U (I) . Entoncesu = u+ − u− y v = v+ − v−, luego f = u+ + v− − (u− + v+) . Aplicando elteorema 4.7 a cada una de las funciones no negativas u++v− y u−+v+ se tieneque f ∈ L (I1) , f ∈ L (I2) , y
∫
I
f =
∫
I1
f =
∫
I2
f
Teorema 4.13 Supongase que f ∈ L (I) y sea ε > 0 dado. Entonces:
i). Existen funciones u y v de U (I) tales que f = u − v, en donde v es nonegativa c.e.t. I e
∫Iv < ε
ii). Existe una función escalonada s y una función g de L (I) tal que f = s+g,donde
∫I|g| < ε
Demostración. i) Puesto que f ∈ L (I) , se puede escribir f = u1 − v1, endonde u1 y v1 son funciones de U (I) . Sea {tn} sucesión que genere v1. Ya que∫Itn →
∫Iv1, se elige N tal que 0 ≤
∫I(v1 − tN) < ε. Sea ahora v = v1 − tn y
u = u1−tN . Entonces, tanto u como v pertenecen a U (I) y u−v = u1−v1 = f.Además como v es no negativa c.e.t. I se puede concluir que
∫
I
v < ε
ii) Se utiliza (i) para elegir u y v de U (I) tal que v ≥ 0 c.e.t. I,
f = u− v y 0 ≤
∫
I
v <ε
2.
Ahora se elige una función escalonada s tal que 0 ≤∫I(u− s) < ε/2. Entonces
f = u− v = s+ (u− s)− v = s+ g
en donde g = (u− s)− v. Luego g ∈ L (I) y se concluye que:
∫
I
|g| ≤
∫
I
|u− s|+
∫
I
|v| <ε
2+
ε
2= ε
51

4.5. Integral de Lebesgue en Conjuntos de Medida Cero
Los siguientes dos teoremas serán de utilidad posteriormente en algunasdemostraciones, y utilizan la definición de conjuntos de medida cero. [REF]
Teorema 4.14 Sea f una función definida en I. Si f = 0 c.e.t I, entoncesf ∈ L (I) y
∫If = 0
Demostración. Sea sn (x) = 0 para todo x en I. Luego {sn} es una sucesióncreciente de funciones escalonadas convergentes a 0 en todo I. Se tiene entoncesque {sn} converge a f casi en todo I. Y puesto que
∫Isn = 0, la sucesión
{∫Isn}
converge. Por tanto f es una función superior, asi f ∈ L (I) y se tiene:∫
I
f = lımn→∞
∫
I
sn = 0.
Teorema 4.15 Supongase f y g definidas en I. Si f ∈ L (I) y si f = g casi entodo I, entonces g ∈ L (I) e
∫If =
∫Ig
Demostración. Aplicando el teorema 4.14 en f−g se tiene que f−g ∈ L (I)e∫I(f − g) = 0. Resultando, g = f − (f − g) ∈ L (I) y
∫
I
g =
∫
I
f −
∫
I
(f − g)
=
∫
I
f − 0
=
∫
I
f
4.6. Teoremas de Levi y Convergencia Dominada
Los siguientes teoremas se aplican a funciones monótonas crecientes, perose aplican igualmente a funciones monótonas decrecientes. Se desarrollan de lamisma manera en que se presentó la integral de Lebesgue: desde las funcionesescalonadas hasta llegar a las clases de funciones integrables. Los resultados quese obtienen mediante los Teoremas de Levi son de importancia para obtener elTeorema de Convergencia Dominada de Lebesgue,
Teorema 4.16 (Teorema de Levi para funciones escalonadas) Sea {sn}una sucesión de funciones escalonadas tal que
52
i). {sn} crece en un intervalo I
ii). Si lımn→∞
∫Isn existe entonces {sn} converge casi en todo I hacia una
función límite f perteneciente a U (I) , y
∫
I
f = lımn→∞
∫
I
sn
Demostración. Se supone, si perder generalidad, que las funciones escalon-adas sn son no negativas. Sea D el conjunto de todos los x de I para los que{sn(x)
}diverge, y sea ε > 0 un numero real dado de antemano. Se probara
que D tiene medida cero mostrando que D se puede recubrir por medio de unacolección numerable de intervalos, cuya suma de longitudes es < ε.
Puesto que la sucesión{∫Isn}
converge, esta acotada por alguna constantepositiva M. Sea
tn (x) =[ ε
2Msn (x)
]si x ∈ I
en donde [y] designa la parte entera ≤ y. Entonces {tn} es una sucesión creciente
de funciones escalonadas tales que cada uno de los valores tn (x) es un enterono negativo.
Si {sn (x)} converge, entonces {sn (x)} esta acotada, luego {tn (x)} esta aco-tada y entonces tn+1 (x) = tn (x) para n suficientemente grande, puesto quecada tn (x) es un entero
Si {sn (x)} diverge, entonces {tn (x)} tambien diverge y tn+1 (x)− tn (x) ≥ 1para infimos valores de n. Sea
dn = {x : x ∈ I y tn+1 (x)− tn (x) ≥ 1} .
Entonces Dn es reunion de un numero finito de intervalos, la suma de cuyaslongitudes se designaran por |Dn| . Ahora
D ⊆∞⋃
n=1
Dn
y si se tiene que∑∞n=1 |Dn| < ε, se habra demostrado que D tiene medida 0.
Se integra la función escalonada no negativa tn+1− tn sobre I y se obtienenlas desigualdades
∫
I
(tn+1 − tn) ≥
∫
Dn
(tn+1 − tn) ≥
∫
Dn
1 = |Dn|
Luego para cada m ≥ 1 se tiene
53

m∑
n=1
|Dn| ≤m∑
n=1
∫
I
(tn+1 − tn)
=
∫
I
tm+1 −
∫
I
t1
≤
∫
I
tm+1
≤ε
2M
∫
I
sm+1 ≤ε
2
Por consiguiente∑∞n=1 |Dn| ≤ ε/2 < ε, de donde D tien medida cero.
Esto prueba que {sn} converge casi en todo I. Sea
f (x) =
{lımn→∞ sn (x) si x ∈ I −D0 si x ∈ D.
Entonces f esta definida en casi todo I y sn → f casi en todo I. Por consigu-
iente, f ∈ U (I) y se concluye
∫
I
f = lımn→∞
∫
I
sn
Teorema 4.17 (Teorema de Levi para funciones superiores) Sea {fn} unasicesión de funciones superiores tales que
i). {fn} crece casi en todo un cierto intervalo I
ii). lımn→∞∫Ifn existe
Entonces {fn} converge casi en todo I hacia una función límite f perte-nenciente a U (I) , y ∫
I
f = lımn→∞
∫
I
fn.
Demostración. Para cada k existe una sucesión creciente de funcionesescalonadas {sn,k} que genera fk. Se define en I una nueva función escalon-ada tn en I por medio de la ecuacion
tn (x) = max {sn,1 (x) , sn,2 (x) , ..., sn.n (x)}
Entonces {tn} es creciente en I ya que
54

tn+1 = max {sn+1,1 (x) , ..., sn+1,n+1 (x)}
≥ max {sn,1 (x) , ..., sn.n+1 (x)}
≥ max {sn,1 (x) , ..., sn.n (x)} = tn (x)
Pero sn,k (x) ≤ fk (x) y {fk} crece casi en todo I, luego se verifica
tn (x) ≤ max {f1 (x) , ..., fn (x)} = fn (x) (1)
casi en todo I. Por consiguiente, por el teorema 4.4 en la parte (iii), se obtiene
∫
I
tn ≤
∫
I
fn (2)
Pero por (ii),{∫Ifn}
esta acotada superiormente y entonces la sucesión cre-
ciente{∫Itn}
tambien esta acotada superiormente y por lo tanto converge.aplicando el teorema 4.16, {tn} converge casi en todo I hacia una función límitef perteneciente a U (I) , e
∫If = lımn→∞
∫Itn.
La definición de tn (x) implica sn.k (x) ≤ tn (x) para todo k ≤ n y todo x deI. Haciendo que n→∞, se obtiene
f (x) ≤ g (x) casi entodo I (3)
De donde la sucesión creciente {fk (x)} esta acotada superiormente por f (x)
casi en todo I, luego converge casi en todo I hacia una función límite g quesatisface g (x) ≤ f (x) casi en todo I. Pero 1 establece que tn (x) ≤ fn (x) casien todo I luego, haciendo n → ∞, se obtiene f (x) ≤ g (x) casi en todo I. Enotras palabras
lımn→∞
fn (x) = f (x) casi en todo I.
Por otro lado, se ve que∫If = lımn→∞
∫Ifn. Haciendo n→∞ en 2 se tiene
∫
I
f ≤ lımn→∞
∫
I
fn (4)
Ahora integrando 3 y aplicando de nuevo el teorema 4.4, se tiene∫Ifk ≤
∫If.
Haciendo k →∞ se tiene lımk→∞∫Ifk ≤
∫If que al conbinarse con la ecuación
4 se obtiene finalmente ∫
I
f = lımn→∞
∫
I
fn.
55

Teorema 4.18 (de Levi para series de funciones en L(I)) Sea {gn} unasucesión de funciones de L (I) tal que
i). cada gn es no negativa casi en todo I,
ii). la serie∑∞n=1
∫Ign converge.
Entonces la serie∑∞n=1 gn converge casi en todo I hacia una función suma
g de L (I) , y se tiene:
∫
I
g =
∫
I
∞∑
n=1
gn =∞∑
n=1
∫
I
gn.
Demostración. Puesto que gn ∈ L (I) , el teorema 4.13 dice que para cadaε > 0 se puede escribir
gn = un − vn
en donde un ∈ U (I) , vn ∈ U (I) , vn ≥ 0, c.e.t. I e∫Ivn < ε.Se eligen un y vn
correspondientes a ε =(12
)n. Entonces
un = gn + vn, en donde
∫
I
vn <
(1
2
)n
La desigualdad que verifica∫Ivn asegura que la serie
∑∞n=1
∫Ivn converge. Aho-
ra un ≥ 0 casi en todo I. Luego las sumas parciales
Un (x) =n∑
k=1
uk (x)
forman una sucesión de funciones superiores {Un} que crece casi en todo I.Puesto que
∫
I
Un =
∫
I
n∑
k=1
uk =n∑
k=1
∫
I
uk =n∑
k=1
∫
I
gk +n∑
k=1
∫
I
vk
la sucesión de integrales{∫IUn}
converge, ya que tanto la serie∑∞k=1
∫Igk
como∑∞k=1
∫Ivk convergen. Por consiguiente, aplicando el teorema 4.17, la
sucesión {Un} converge casi en todo I hacia una función límite U de U (I) , e∫IU = lımn→∞
∫IUn. Pero
∫
I
Un =n∑
k=1
∫
I
uk,
luego ∫
I
U =∞∑
k=1
∫
I
uk.
56

De la misma forma la sucesión de sumas parciales {Vn} dadas por
Vn (x) =n∑
k=1
vk (x)
converge casi en todo I hacia una función límite V de U (I) y se tiene que
∫
I
V =∞∑
k=1
∫
I
vk.
De donde se tiene que U − V ∈ L (I) y la sucesión {∑nk=1 gk} = {Un − Vn}
converge casi en todo I hacia U − V. Sea g = U − V. Entonces g ∈ L (I) y secumple: ∫
I
g =
∫
I
U −
∫
I
V =∞∑
k=1
∫
I
(uk − vk) =∞∑
k=1
∫
I
gk
Teorema 4.19 (de Levi para sucesiones de funciones en L(I)) Sea {fn}una sucesión de funciones de L (I) tal que
i). {fn} crece casi en todo I
ii). lımn→∞∫Ifn existe
Entonces {fn} converge casi en todo I hacia una función límite f de L (I)y
∫
I
f = lımn→∞
∫
I
fn
Demostración. Sea {fn} que satisface (i) y (ii). Sea g1 = f1 y sea gn =fn − fn−1 para n ≥ 2, entonces
fn =n∑
k=1
gk.
aplicando el teorema 4.18 a {gn} , se tiene que∑∞n=1 gn coverge casi en todo I
hacia una funcin suma g de L (I) , y se verifica la ecuación
∫
I
g =
∫
I
∞∑
n=1
gn =∞∑
n=1
∫
I
gn.
Por consiguiente fn → g casi en todo I y se tiene finalmente:∫
I
g = lımn→∞
∫
I
fn
57

Teorema 4.20 (Teorema de Convergencia Dominada de Lebesgue) Sea{fn} una sucesión de funciones integrables de Lebesgue en un intervalo I. Supon-gase que
i). {fn} converge casi en todo I hacia una función límite f.
ii). existe una función no negativa g de L (I) tal que, para todo n ≥ 1,
|fn (x)| ≤ g (x) c.e.t. I.
Entonces se puede afirmar que la función límite f ∈ L (I) , la sucesión{∫Ifn}converge y además se cumple que:
∫
i
f = lımn→∞
∫
I
fn
La propiedad (ii) se enuncia diciendo que la sucesión {fn} esta dominada
por g casi en todo I.
Demostración. La idea de la demostración consiste en obtener cotas supe-riores e inferiores de la forma
gn (x) ≤ fn (x) ≤ Gn (x) (1)
en donde {gn} crece y {Gn} decrece casi en todo I hacia la función límitef. Para ello se utiliza la teoria de Levi para demostrar que f ∈ L (I) y que∫If = lımn→∞
∫Ign = lımn→∞Gn, de lo que se deduce
∫
i
f = lımn→∞
∫
I
fn (2)
Para construir {gn} y {Gn} , hacemos uso repetido del teorema de Levi parasucesiones de L (I) . Ante todo se define una sucesión {Gn,1}
Gn,1 (x) = max {f1 (x) , f2 (x) , ..., fn)x} .
Cada función Gn,1 ∈ L (I) por el teorema 4.10, y la sucesión {Gn,1} es crecienteen I. Dado que |Gn,1 (x)| ≤ g (x) casi en todo I, se tiene
∣∣∣∣
∫
I
Gn,1
∣∣∣∣ ≤∫
I
|Gn,1| ≤
∫
I
g. (3)
Por lo tanto la sucesión creciente de numeros{∫IGn,1
}esta acotada superi-
ormente por∫Ig, luego lımn→∞
∫IGn,1 existe. Aplicando el teorema 4.19, la
sucesión {Gn,1} converge casi en todo I hacia una función G1 de L (I) , y setiene: ∫
I
G1 = lımn→∞
∫
I
Gn,1 ≤
∫
I
g.
58

Por la ecuación 3 se tiene también la desigualdad −∫Ig ≤
∫IG1. Se observa
que si x es un punto de I para el que Gn,1 (x) → G1 (x) , entonces también sedebe tener que:
G1 (x) = sup {f1 (x) , f2 (x) , ...}
asimismo, para cada r ≥ 1 se considera
Gn,r (x) = max {fr (x) , fr+1 (x) , ..., fn (x)}
para n ≥ r. Entonces la sucesión {Gn.r} crece y converge casi en todo I haciauna función límite Gr de L (I) con
−
∫
I
g ≤
∫
I
Gr ≤
∫
I
g.
Ademas, en todos los puntos en los que Gn,r (x)→ Gr (x) , se tiene
Gr (x) = sup {fr (x) , fr+1 (x) , ...} ,
luegofr (x) ≤ Gr (x) c.e.t. I
Examinando ahora las propiedades de la sucesión {Gn (x)} . Ya que A ⊆ Bimplica supA ≤ supB, la sucesión {Gr (x)} decrece casi en todo I y por tantoconverge casi en todo I. A continuación se ve que Gn (x)→ f (x) siempre que
lımn→∞
fn (x) = f (x) . (4)
Si se verifica la ecuación 4, entonces para cada ε > 0, existe un entero N tal que
f (x)− ε < fn (x) < f (x) + ε para todo n ≥ N
De donde si m ≥ N se tiene
f (x)− ε ≤ sup {fm (x) , fm+1 (x) , ...} ≤ f (x) + ε
que es lo mismo que
m ≥ N implica f (x)− ε ≤ Gm (x) ≤ f (x) + ε
y eso implica que
lımm→∞
Gm (x) = f (x) , casi en todo I (5)
Por otra parte, la sucesión numérica decreciente{∫IGn
}esta acotada inferior-
mente por −∫Ig, y se puede concluir que converge. Por la ecuación 5 y por el
teorema 4.19, se ve que f ∈ L (I) y que
lımn→∞
∫
I
Gn =
∫
I
f.
59

Al aplicar este mismo argumento a la sucesión
gn,r (x) = mın {fr (x) , fr+1 (x) , ..., fn (x)} ,
para n ≥ r, se obtiene que {gn,r} decrece y converge casi en todo I hacia unafunción límite gr de L (I) , en donde
gr (x) = inf {fr (x) , fr+1 (x) , ...} c.e.t.I.
Ademas, casi en todo I se tiene gr (x) ≤ fr (x) , {gr} crece, lımn→∞ gn (x) =f (x) , y
lımn→∞
∫
I
gn =
∫
I
f.
Ya que la ecuación 1 se verifica casi en todo I, se tiene∫Ign ≤
∫Ifn ≤
∫IGn.
Si se hace que n→∞ se tiene que{∫Ifn}
converge y que
lımn→∞
∫
I
fn =
∫
I
f
Teorema 4.21 Sea {gn} una sucesión de funciones de L (I) tal que
i). cada gn es no negativa casi en todo I.
ii). la serie∑∞n=1 gn converge casi en todo I hacia una función g acotada su-
periormente por una función L (I) .
Entonces g ∈ L (I) , la serie∑∞n=1
∫Ign converge, y se tiene que
∫
I
∞∑
n=1
gn =∞∑
n=1
∫
I
gn.
Demostración. Si se tiene
fn (x) =n∑
k=1
gk (x) si x ∈ I.
Entonces fn ↗ g casi en todo I, y {fn} está dominada casi en todo I porla función L (I), la cual acota superiormente a la función g. Por consiguiente,al apliar el teorema 4.20, g ∈ L (I) , la sucesión
{∫Ifn}
converge, e∫Ig =
lımn→∞∫Ifn con lo que queda demostrado el teorema.
Teorema 4.22 (Teorema de Convergencia Acotada de Lebesgue) Sea Iun intervalo acotado. Supongase que {fn} es una sucesión de funciones de L (I)que es acotadamente convergente casi en todo I. Esto es, supongase que admiteuna función límite de f y una constante positiva M tales que
lımn→∞
fn (x) = f (x) y |fn (x)| ≤M, casi en todo I
Entonces f ∈ L (I) y lımn→∞∫Ifn =
∫If
60

Demostración. Se aplica el teorema 4.20 con g (x) =M para todo x de I.Entonces g ∈ L (I) , puesto que I es un intervalo acotado se tiene f ∈ L (I) ylımn→∞
∫Ifn =
∫If.
Teorema 4.23 Sea {fn} una sucesión de funciones de L (I) que converge casien todo I hacia una función límite f. Supongase que existe una función nonegativa g de L (I) tal que
|f (x)| ≤ g (x) c.e.t. I
Entonces f ∈ L (I) .
Demostración. Se define una nueva sucesción de funciones {gn} en I
gn = max {mın (fn, g) ,−g}
Geométricamente la función gn se obtiene a partir de la función fn cortandolela parte de la grafica que se halla por encima de g y la que se halla por debajode −g.
Entonces |gn (x)| ≤ g (x) casi en todo I, y es facil verificar que gn → f casien todo I. Por consiguiente en virtud del teorema 4.20, f ∈ L (I) .
4.7. Integradores de Lebesgue sobre Intervalos no Acota-dos
Teorema 4.24 Sea f una función definida en el semiintervalo infinito I =[a,+∞) . Supongase que f es integrable mediante Lebesgue en el intervalo com-pacto [a, b] para cada b ≥ a, y que existe una constante positiva M tal que
∫ b
a
|f | ≤M para todo b ≥ a
Entonces f ∈ L (I) , el límite lımb→+∞∫ baf existe, y
∫ +∞
a
f = lımb→+∞
∫ b
a
f
Demostración. Sea {bn} una sucesión creciente de números reales con bn ≥a tal que lımn→∞ bn = +∞. Se define una sucesión {fn} en I
fn (x) =
{f (x) si a ≤ x ≤ bn,0 en otro caso.
Por el teorema 4.11 cada fn ∈ L (I) y fn → f en I. luego |fn| → |f | en I. Pero
|fn| es creciente y ya que∫ ba|f | ≤M para todo b ≥ a, la sucesión
{∫I|fn|
}esta
acotada superiormente por M. Por lo tanto lımn→∞∫I|fn| existe. por el teorema
61

4.19, la función límite de |f | ∈ L (I) . Ahora bien, cada |fn| ≤ |f | y fn → f en I,y entonces por el teorema de 4.20, f ∈ L (I) y lımn→∞
∫Ifn =
∫If. De donde
lımn→∞
∫ bn
a
f =
∫ +∞
a
f
para todas las sucesiones {bn} que crecen hacia +∞.
4.8. Funciones Medibles
Definición 4.9 Una función f definida en I se llama medible en I, y se escribef ∈M (I) , si existe una sucesión de funciones escalonadas {sn} en I tal que
lımn→∞
sn (x) = f (x) casi en todo I
Teorema 4.25 Si f ∈M (I) y si |f (x)| ≤ g (x) casi por todo I para la funciónno negativa g de L (I) , entonces f ∈ L (I)
Demostración. Existe una sucesión de funciones escalonadas {sn} tal quesn (x)→ f (x) casi por todo I. Ahora se aplica el teorema 4.23 del cual se deduceque f ∈ L (I) .
Corolario 4.1 Si f ∈M (I) y |f | ∈ L (I) , entonces f ∈ L (I)
Corolario 4.2 Si f es medible y acotada en un intervalo acotado I, entoncesf ∈ L (I)
Teorema 4.26 Sea ϕ una función real continua en R2. Si f ∈ M (I) y g ∈M (I) , se define h en I por medio de la ecuacion
h (x) = ϕ [f (x) , g (x)] .
Entonces h ∈ M (I) . En particular, f + g, f · g, |f | , max (f, g) , mın (f, g)pertenecen a M (I) . además 1
f∈M (I) si f (x) �= 0 casi en todo I.
Demostración. Sean {sn} y {tn} dos sucesiones de funciones escalonadastales que sn → f y tn → g casi en todo I. Entonces la función un = ϕ [sn, tn] esuna función escalonada tal que un → h casi en todo I. Luego h ∈M (I) .
Teorema 4.27 Sea f una función definida en I y supongase que {fn} es unasucesión de funciones en I tal que fn (x)→ f (x) casi en todo I. Entonces f esmedible en I.
62

Demostración. Se elige una función positiva g de L (I, ) , g = 1(1+x2) para
todo x de I. sea
Fn (x) = g (x)fn (x)
1 + |fn (x)|para x de I
Entonces
Fn (x) −→g (x) fn (x)
1 + |fn (x)|casi en todo I
Sea F (x) =g (x) f (x)
1 + |f (x)|. Dado que cada función Fn es medible en I y que
|Fn (x)| < g (x) para todo x,el teorema 4.25 prueba que Fn ∈ L (I) . Además,|F (x)| < g (x) para todo x de I, por el teorema 4.23, F ∈ L (I) . y entoncesF ∈M (I) .Ahora, se tiene
f (x {g (x)− |F (x)|}) = f (x) g (x)
{1−
|f (x)|
1 + |f (x)|
}=
f (x) g (x)
1 + |f (x)|= F (x)
para todo x de I, luego
f (x) =F (x)
g (x)− |F (x)|.
De donde f ∈M (I) debido a que cada una de las funciones F, g y |F | pertenecen
a M (I) y g (x)− |F (x)| > 0 para todo x de I
4.9. Continuidad de Funciones Definidas por medio de In-tegrales de Lebesgue
Teorema 4.28 Sean X e Y dos subintervalos de R, y sea f una función defini-da en X × Y que satisfaga las condiciones
i). Para cada punto y de Y, la función fy definida enX por medio de la ecuacion
fy (x) = f (x, y)
es medible en X
ii). Existe una función no negativa g de L (X) tal que para cada y de Y,
|f (x, y)| ≤ g (y) c.e.t. X
iii). Para casi todas los x de X, f (x, y) es una función de y continua en Y.Para cada y de Y
lımt→y
f (x, t) = f (x, y) c.e.t. X
63
Entonces la integral de Lebesgue∫Xf (x, y) dx existe en cada y de Y, y la
función F definida porF (y) =∫Xf (x, y) dy
es continua en Y. Si y ∈ Y se tiene
lımt→y
∫
X
f (x, t) dx =
∫
X
lımt→y
f (x, t) dx
Demostración. Dado que fy es medible en X y dominada casi en todo Xpor una función no negativa g de L (I) , el teorema 4.25 prueba que fy ∈ L (I) ,esto es, la integral de Lebesgue
∫Xf (x, y) dx existe para cada y de Y, Si se elige
un punto fijo y de Y y sea {yn} una sucesión de puntos Y tal que lım yn = y.Se prueba que lımF (yn) = F (y) . Sea Gn (x) = f (x, yn) . Cada Gn ∈ L (X) ypor (iii) se tiene que Gn (x) → f (x, y) casi en todo X. Se puede observar queF∫yn =
∫XGn (x) dx. Puesto que (ii) se verifica, el teorema 4.20 prueba que
la sucesión {F (yn)} converge y que:
lımn→∞
F (yn) =
∫
X
f (x, y) dx = F (y)
64
5. Comparación entre las Integrales de Riemann-Stieltjes y las integrales de Lebesgue
Aunque la costumbre es estudiar el calculo integral mediante el calculo deáreas, este estudio también puede hacerse mediante la búsqueda de soluciones dela ecuación diferencial y′ = f(x), algo posible y hasta natural en el estudio de laevolución de un fenómeno fisico. Se trata del problema del cálculo de primitivas:hallar una función y tal que y′ = f(x).
El calculo de primitivas resultó ser una herramienta de gran utilidad y derelativamente fácil aplicación debido al Teorema Fundamental del Cálculo parala integral de Riemann. Este teorema representa una gran ventaja porque es-tablece una estrecha relación entre el calculo de áreas y el calculo de primitivas,pero deja huecos en este ultimo hecho como demostrara Vito Volterra en 1885al construir una función derivable en [a, b] con derivada acotada perono integrable en el sentido de Riemann. La integral de Lebesgue apareceentonces en las primeras décadas del siglo XX, como una solución a este proble-ma: como constructo matemático, no solo amplía el dominio que pueden tenerlas funciones integrales, sino que en general, amplía el propio concepto de inte-gración.
Dentro de los conceptos que permiten definir y utilizar la integral de Lebesguese encuentra en primera instancia, el concepto de medida [UD01],.[BA01]. Unamedida no es más que una función que a ciertos subconjuntos A les asocia unnumero no negativo µ (A), llamado su medida o volumen, que da una idea de su"tamaño". Si se considera una función f [a, b]→ R que toma un número finitode valores, la definición de la integral de Riemann corresponde esencialmentea dividir el intervalo [a, b] en subintervalos, multiplicar el valor que la funcióntoma en cada subintervalo por su longitud y sumar. Esto es:
∫ b
a
f (x) dx =n∑
k=1
f (xk) (xk − xk−1)
Para la integral de Lebesgue, se determina primero cual es la pre imagenEk ⊂ [a, b] de cada valor yk que la función asume, se multiplica la medida de lapre imagen por el valor de la función y se suma:
∫ b
a
fdµ =m∑
k=1
ykµ (Ek)
Ahora bien, es de esperarse que los resultados numéricos obtenidos por losdos métodos sean los mismos, cuando se tratan de funciones integrables tantomediante Riemann como Lebesgue.
La función que a cada subconjunto de R le asocie un tamaño o medida µ(A)debe satisfacer ciertas propiedades:
65
1. Para un segmento A = [ab] la medida este dada por su longitud, µ (A) =b− a
2. Si A es la unión de conjuntos A1, A2, . . . disjuntos dos a dos, entoncesµ (A) =
∑nk=1 µ (Ak)
3. Si A es un conjunto con medida µ(A) entonces su traslación x + A ={x+ y : y ∈ A} deberá tener la misma medida µ (x+A) = µ (A) .
En 1905 Vitali dijo que este tipo de funciones no existian, y demostró queexisten conjuntos muy extraños para los cuales no son validas estas propiedadesque parecen obvias, que para solucionar este problema se debía modificar nuestranoción de tamaño o bien restringirse a medir únicamente una colección maspequeña de subconjuntos de R. Esta ultima opción es la mas adecuada ya quelos subconjuntos de R medibles incluyen a cualquier subconjunto normal, quepueda ser aproximado mediante intervalos.
Uno de los aspectos que más han impulsado el desarrollo de la integral deLebesgue se expuso en la sección 4.3. Allí se mencionó que se estaba buscandola definición de una nueva integral cuya clase de funciones integrables fueramayor que las funciones integrables bajo Riemann y que además tuviera buencomportamiento. Por buen comportamiento se hace referencia particular a lapropiedad (deseable e importante) que dice que la integral del límite equivale allímite de las integrales (que no se cumple siempre en las integrales de Riemann,donde se puede tener que el límite de una sucesión de funciones integrablesno sea integrable). Esta última propiedad es establecida progresivamente en laintegral de Lebesgue mediante los teoremas de convergencia monótona, ellema de Fatou y finalmente el teorema de convergencia dominada deLebesgue.
Sin embargo, comparando los teoremas de Lebesgue con los teoremas rel-ativos a la integral de Riemann, se tiene el teorema 5.1 equivalente en ciertamanera al teorema de convergencia dominada de Lebesgue.
Teorema 5.1 (Teorema de Convergencia para Riemann) Sean a, b ∈ R,con a < b, y sea {fn} una sucesión uniformemente convergente de fun-ciones integrables mediante Riemann definidas en [a, b] tales que lım
n→∞fn (x) =
f (x) para todo x ∈ [a, b] . Entonces:
lımn→∞
∫ b
a
fn(x)dx =
∫ b
a
f(x)dx
Un exámen y una comparación detallada de ambos teoremas muestra quela versión de Riemann exige que fn sea uniformemente convergente, estoes, que dado un ε > 0, exite un número natural N tal que |f(x)− fn(x)| < εsiempre que n > N, para todo x ∈ [a, b] . Por otra parte, la versión de Lebesgue,el teorema de convergencia dominada, es mucho menos restrictivo respecto de
66

fn. Gracias a esta diferencia, se puede esperar que la clase de las funcionesintegrables mediante Lebesgue tengan mejores propiedades para el límite que laclase de las funciones integrables mediante Riemann.
En esencia, la integral de Lebesgue se comporta mejor y para ello un ejem-plo muy sencillo de función integrable mediante Lebesgue pero no medianteRiemann: la Función de Dirichlet, que se puede definir como
fn (x) =
{2n si x es racional0 si x es irracional
Se puede encontrar [WM78] el siguiente teorema, que muestra como un fun-ción que es integrable mediante Riemann es integrable mediante Lebesgue:
Teorema 5.2 (Integrable bajo Riemann es integrable bajo Lebesgue)Si f es una función integrable bajo Riemann en el intervalo I = [a, b], entoncesf ∈ L(I), y las dos integrales son iguales. Esto es:∫ b
a
f(x)dx =
∫
I
fdm
Demostración. Dado el intervalo I = [a, b], y n ≥ 1 indica la cantidad desubintervalos en los que está particionado. Además, se tomará aquí por α(xn)como la función escalonada asociada con una partición Pn. Entonces, se tieneque siempre es posible encontrar una particón Pn que cumpla:
0 ≤ (i)
∫ b
a
fdα−_I(f, α) <1
n
además se puede verificar que:
_I(f, α)→ (i)
∫ b
a
fdα si n→∞
De manera análoga se puede obtener el siguiente resultado:
I(f, α)→ (s)
∫ b
a
fdα si n→∞
Tomando la unión de las sumas inferior y superior, se puede verificar que:
_I(f, α) ≤ L(Pn, f, α) ≤ (i)
∫ b
a
fdα
I(f, α) ≥ S(Pn, f, α) ≥ (s)
∫ b
a
fdα
Lo cual implica que se debe cumplir:
L(Pn, f, α) → (i)
∫ b
a
fdα si n→∞ (2)
U(Pn, f, α) → (s)
∫ b
a
fdα si n→∞ (3)
67
Se puede reemplazar la sucesión P1, P2, P3... por P1,P1 ∪P2, P1 ∪P2 ∪P3, ...y renombrar cada uno de los subintervalos así formados como P1, P2, ... se puedeasumir que Pn ⊂ Pn+1 y además las ecuaciones 2 y 3 se conservan.
Ahora bien, si Pn ⊂ Pn+1 se tiene que para todo n y para todo x se cumple:y se tiene en particular que {Ln} es una sucesión creciente, y se ve que está
acotada superiormente por f ; por tanto, lımn→∞
{Ln} = g existe, y satisface g ≤ f.
De manera análoga para {Un} es una sucesión decreciente acotada inferiormentepor f, y por tanto lım
n→∞{Un} = h existe y cumple que h ≥ f.
Ahora se puede verificar que {α(x) − α(x)} es una sucesión creciente defunciones escalonadas, no negativas, medibles que tiende a g − α(x). Por lotanto, se puede aplicar el teorema de convergencia monónota de Lebesgue y setiene:
∫ b
a
(g − α(x)) dm = lımn→∞
I(α...) = (i)
∫ b
a
f(x)dx−_I(f, α)
Como α(xn) es una función simple, se tiene que∫ baadm = _I(f, α) y por lo
tanto: ∫ b
a
gdm = (i)
∫ b
a
f(x)dx
De manera análoga para la sucesión {α(xn)− α(x1)} se encuentra que:
∫
I
hdm = (s)
∫ b
a
f(x)dx
donde la integral de la izquierda es de Lebesgue y la de la derecha es deRiemann.
Por lo tanto, si f es integrable según Riemann,∫I(g−h)dm = 0, con h−g ≥ 0.
Esto implica que h = g, c.e.t.I. Pero g ≤ f ≤ h resultando f = g c.e.t.I.Como consecuencia, sus integrales según Lebesgue son iguales y coinciden con
la integral de Riemann correspondiente∫ baf(x)dx.
Es conveniente hacer explícitos dos aspectos importantes:
1. Que el converso de la implicación del teorema no es válido, esto es, no escierto que toda función integrable mediante Lebesgue sea integrable bajoRiemann.
2. Que si una función no es integrable bajo Riemann, no necesariamente esintegrable bajo Lebesgue.
3. Que es teorema anterior solo se aplica a integrales propias.
4. Existen integrales impropias que se solucionan con base en la teoría deRiemann, pero que no son solucionables mediante Lebesgue.
Para aclarar estos puntos se puede consultar la figura 2, que muestra larelación entre las principales integrales actuales. Respecto al tercer punto, se
68
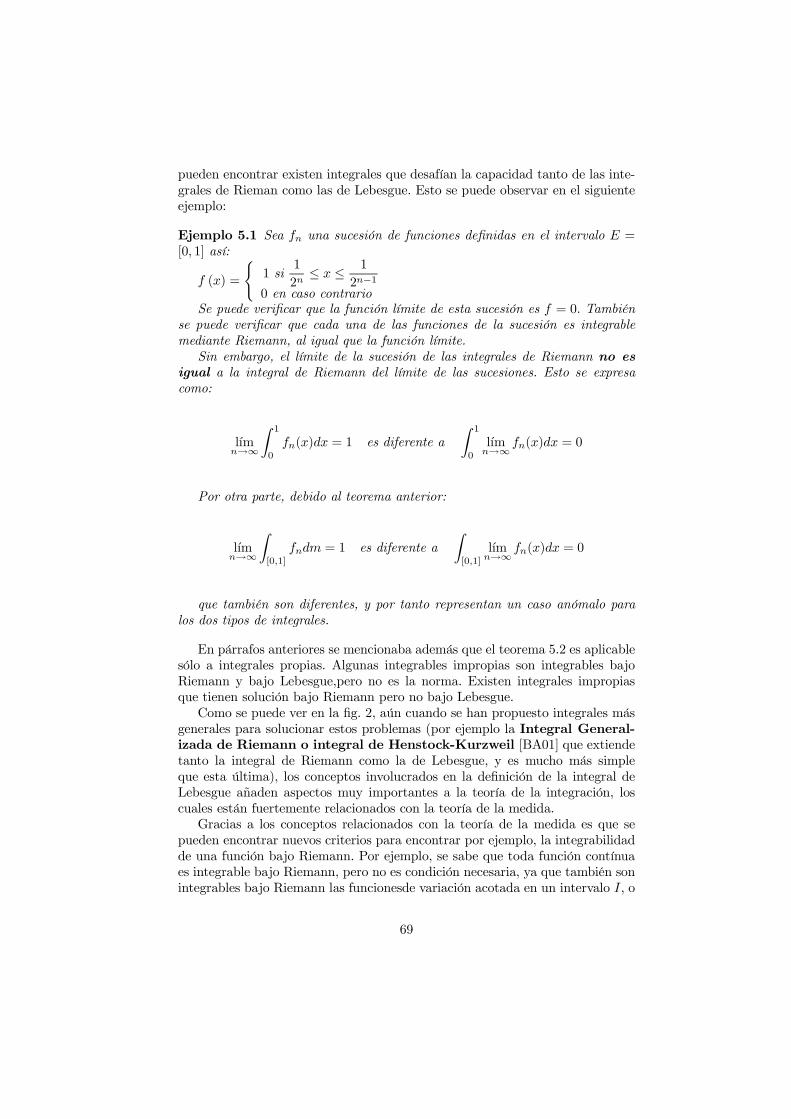
pueden encontrar existen integrales que desafían la capacidad tanto de las inte-grales de Rieman como las de Lebesgue. Esto se puede observar en el siguienteejemplo:
Ejemplo 5.1 Sea fn una sucesión de funciones definidas en el intervalo E =[0, 1] así:
f (x) =
{1 si
1
2n≤ x ≤
1
2n−10 en caso contrario
Se puede verificar que la función límite de esta sucesión es f = 0. Tambiénse puede verificar que cada una de las funciones de la sucesión es integrablemediante Riemann, al igual que la función límite.
Sin embargo, el límite de la sucesión de las integrales de Riemann no esigual a la integral de Riemann del límite de las sucesiones. Esto se expresacomo:
lımn→∞
∫ 1
0
fn(x)dx = 1 es diferente a
∫ 1
0
lımn→∞
fn(x)dx = 0
Por otra parte, debido al teorema anterior:
lımn→∞
∫
[0,1]
fndm = 1 es diferente a
∫
[0,1]
lımn→∞
fn(x)dx = 0
que también son diferentes, y por tanto representan un caso anómalo paralos dos tipos de integrales.
En párrafos anteriores se mencionaba además que el teorema 5.2 es aplicablesólo a integrales propias. Algunas integrables impropias son integrables bajoRiemann y bajo Lebesgue,pero no es la norma. Existen integrales impropiasque tienen solución bajo Riemann pero no bajo Lebesgue.
Como se puede ver en la fig. 2, aún cuando se han propuesto integrales másgenerales para solucionar estos problemas (por ejemplo la Integral General-izada de Riemann o integral de Henstock-Kurzweil [BA01] que extiendetanto la integral de Riemann como la de Lebesgue, y es mucho más simpleque esta última), los conceptos involucrados en la definición de la integral deLebesgue añaden aspectos muy importantes a la teoría de la integración, loscuales están fuertemente relacionados con la teoría de la medida.
Gracias a los conceptos relacionados con la teoría de la medida es que sepueden encontrar nuevos criterios para encontrar por ejemplo, la integrabilidadde una función bajo Riemann. Por ejemplo, se sabe que toda función contínuaes integrable bajo Riemann, pero no es condición necesaria, ya que también sonintegrables bajo Riemann las funcionesde variación acotada en un intervalo I, o
69
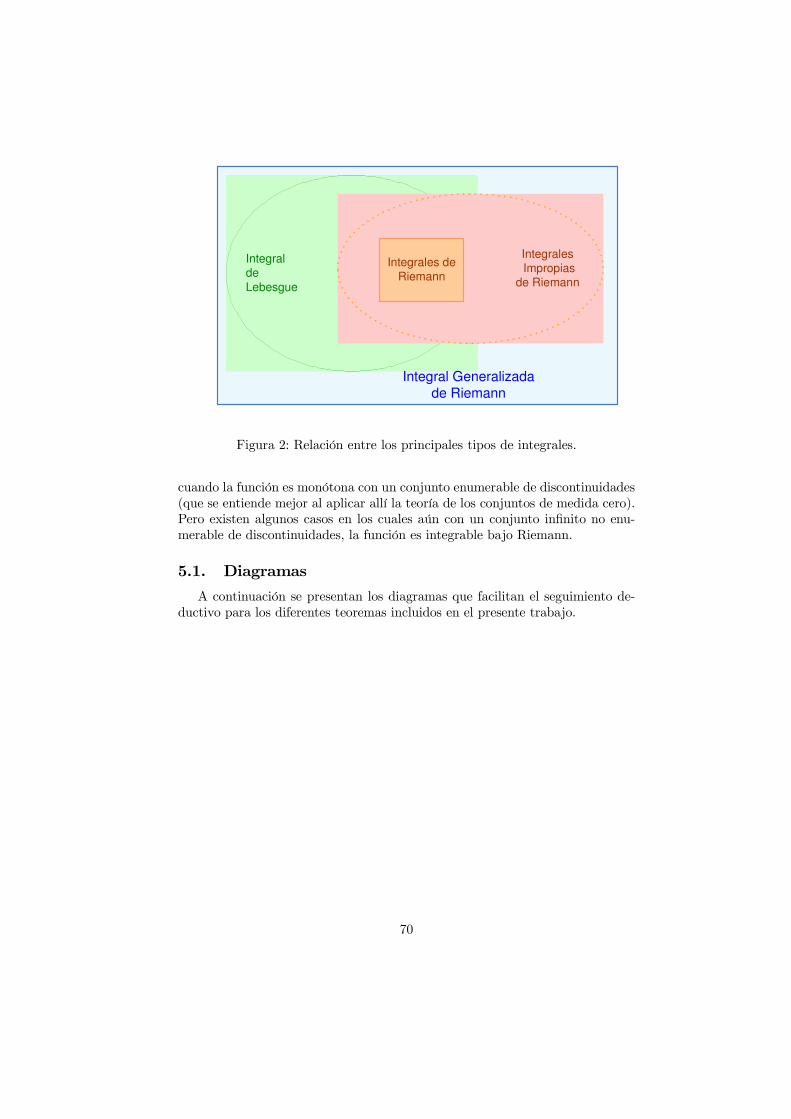
Integralde
Lebesgue
Integrales Impropias
de Riemann
Integrales de Riemann
Integral Generalizada de Riemann
Figura 2: Relación entre los principales tipos de integrales.
cuando la función es monótona con un conjunto enumerable de discontinuidades(que se entiende mejor al aplicar allí la teoría de los conjuntos de medida cero).Pero existen algunos casos en los cuales aún con un conjunto infinito no enu-merable de discontinuidades, la función es integrable bajo Riemann.
5.1. Diagramas
A continuación se presentan los diagramas que facilitan el seguimiento de-ductivo para los diferentes teoremas incluidos en el presente trabajo.
70
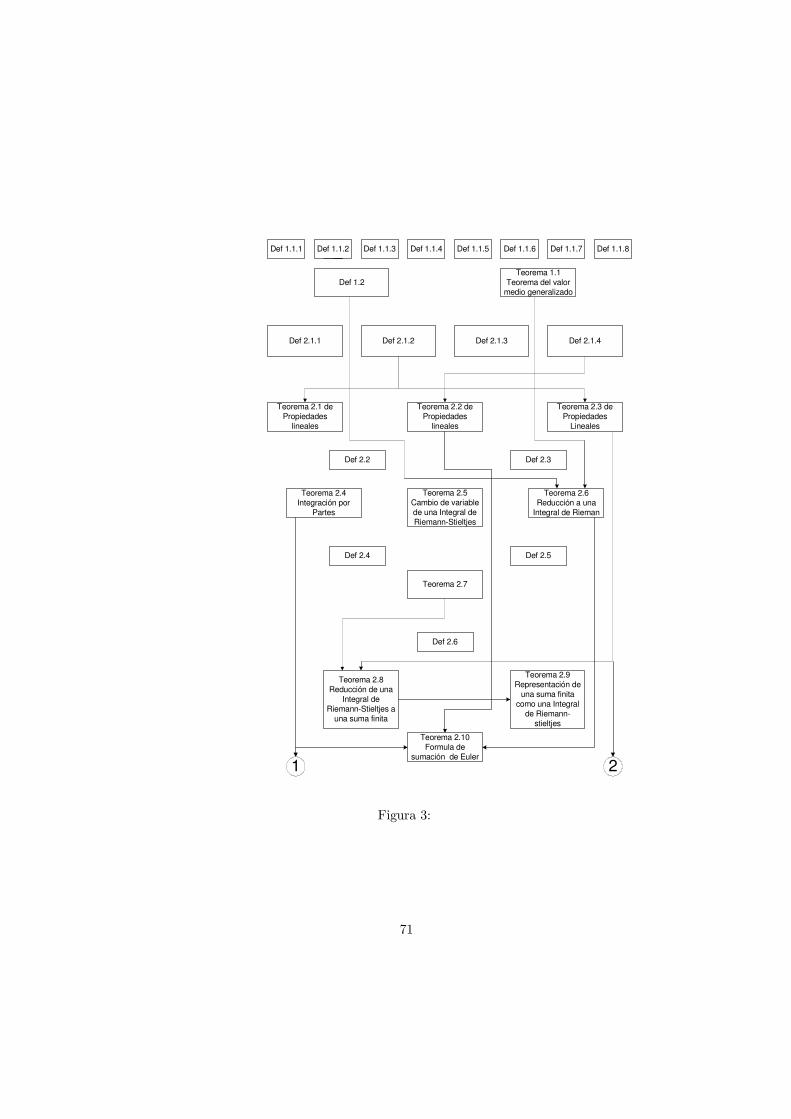
Def 2.1.2Def 2.1.1 Def 2.1.4Def 2.1.3
Teorema 2.1 de
Propiedades
lineales
Teorema 2.2 de
Propiedades
lineales
Teorema 2.3 de
Propiedades
Lineales
Def 2.2 Def 2.3
Teorema 2.4
Integración por
Partes
Teorema 2.5
Cambio de variable
de una Integral de
Riemann-Stieltjes
Teorema 2.6
Reducción a una
Integral de Rieman
Def 1.1.1 Def 1.1.8Def 1.1.7Def 1.1.6Def 1.1.5Def 1.1.4Def 1.1.3Def 1.1.2
Def 1.2
Teorema 1.1
Teorema del valor
medio generalizado
Def 2.5Def 2.4
Teorema 2.7
Def 2.6
Teorema 2.9
Representación de
una suma finita
como una Integral
de Riemann-
stieltjes
Teorema 2.8
Reducción de una
Integral de
Riemann-Stieltjes a
una suma finita
Teorema 2.10
Formula de
sumación de Euler
1 2
Figura 3:
71
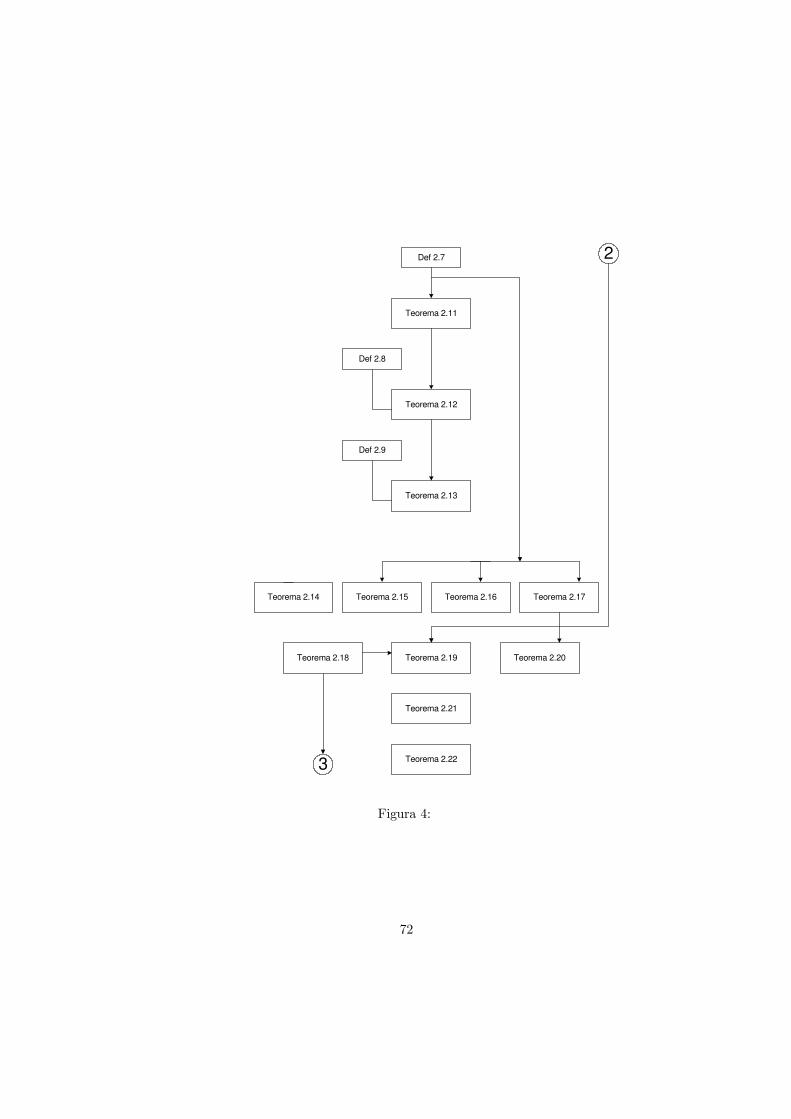
Def 2.7
Teorema 2.11
Def 2.8
Teorema 2.12
Def 2.9
Teorema 2.13
Teorema 2.16Teorema 2.15Teorema 2.14 Teorema 2.17
Teorema 2.19 Teorema 2.20Teorema 2.18
Teorema 2.21
Teorema 2.22
2
3
Figura 4:
72
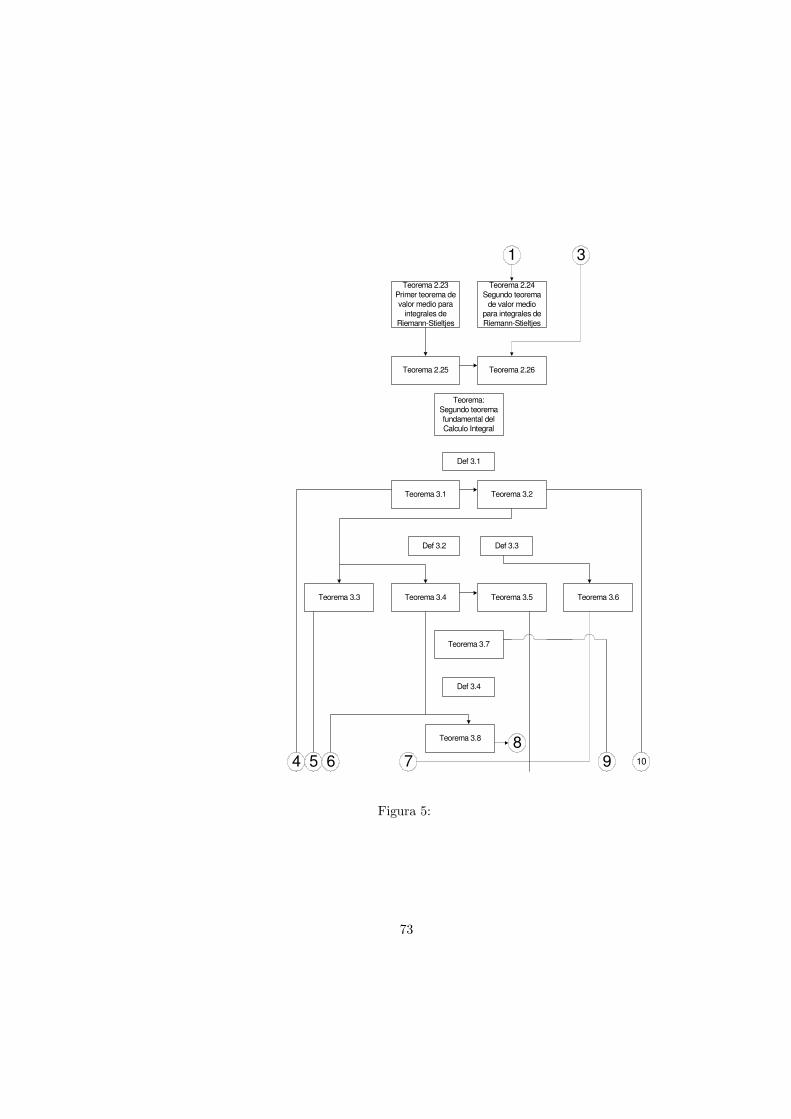
Teorema 2.23
Primer teorema de valor medio para
integrales de
Riemann-Stieltjes
Teorema 2.24
Segundo teorema
de valor medio para integrales de
Riemann-Stieltjes
Teorema 2.25 Teorema 2.26
Teorema:
Segundo teorema
fundamental del Calculo Integral
Def 3.1
Teorema 3.1 Teorema 3.2
Def 3.2
Teorema 3.7
Teorema 3.6Teorema 3.3 Teorema 3.5Teorema 3.4
Def 3.3
Def 3.4
Teorema 3.8
1 3
4 5 6 78
9 10
Figura 5:
73
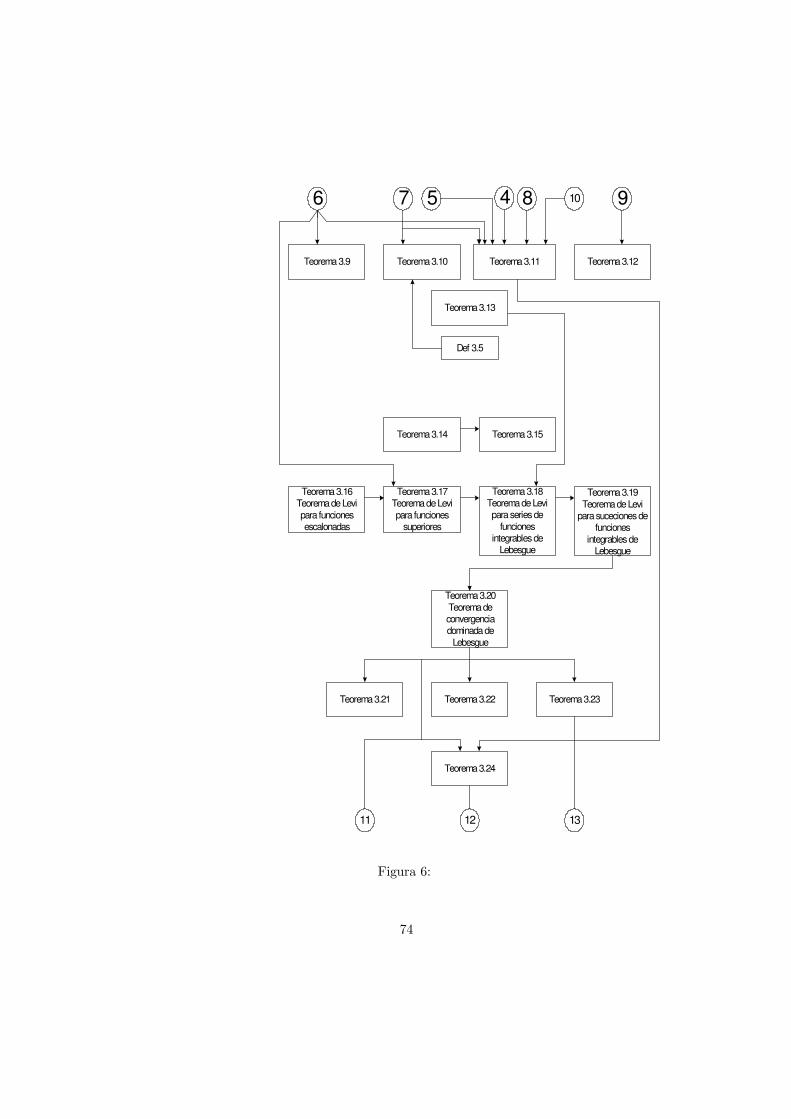
Teorema 3.10 Teorema 3.12Teorema 3.9 Teorema 3.11
Def 3.5
Teorema 3.13
Teorema 3.14 Teorema 3.15
Teorema 3.19
Teorema de Levi para suceciones de
funciones
integrables de Lebesgue
Teorema 3.18 Teorema de Levi para series de
funciones integrables de
Lebesgue
Teorema 3.16 Teorema de Levi
para funciones escalonadas
Teorema 3.17 Teorema de Levi
para funciones superiores
Teorema 3.20
Teorema de convergencia dominada de
Lebesgue
Teorema 3.23Teorema 3.21 Teorema 3.22
Teorema 3.24
456 7 8 10 9
11 12 13
Figura 6:
74
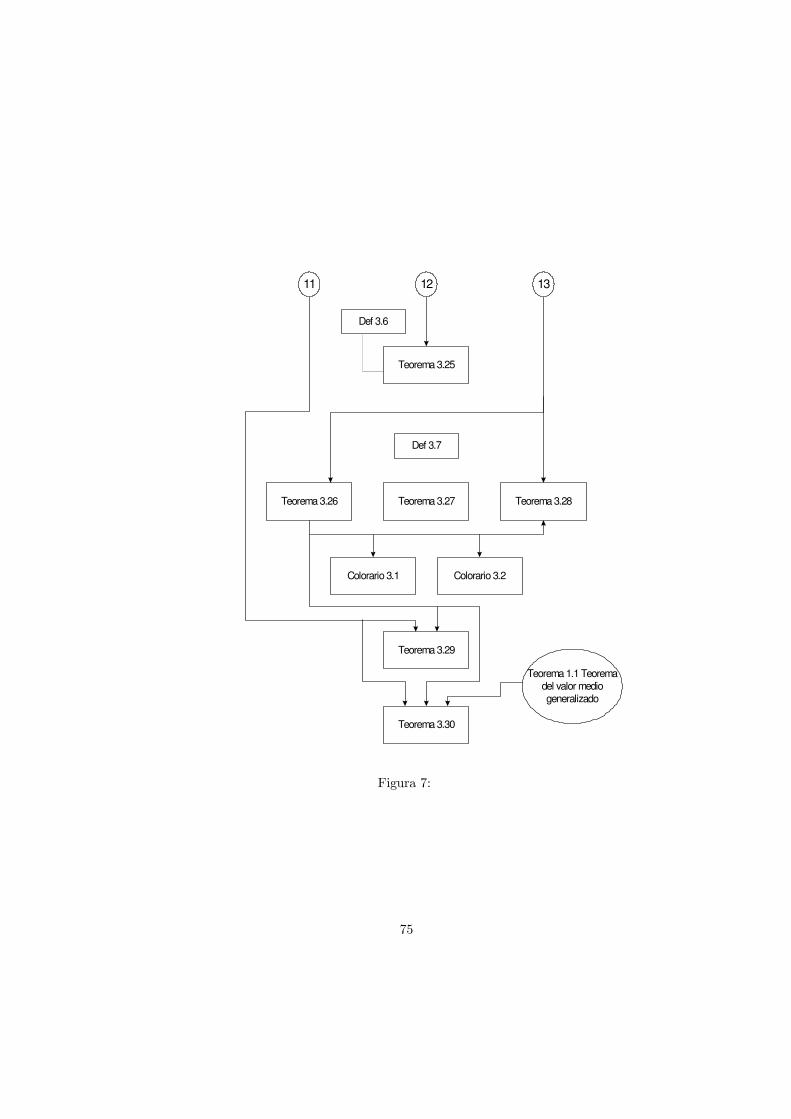
Def 3.6
Teorema 3.25
Def 3.7
Teorema 3.28Teorema 3.26 Teorema 3.27
Colorario 3.2Colorario 3.1
Teorema 3.29
Teorema 3.30
Teorema 1.1 Teorema
del valor medio
generalizado
11 12 13
Figura 7:
75

6. Conclusiones
Conclusión 6.1 Con el presente trabajo se espera haber desarrollado los teore-mas de la Integral de Riemann-Stieltjes de una manera clara y concreta abarcan-do todos aquellos pasos en el los libros de referencia aparecen como “es trivialy se deja como ejercicio para el lector”, “se desarrolla de manera reciproca”,entre otras; que en ocasiones no son para nada triviales y se convierten en unadificultad para la comprensión de estos teoremas.
Con las Integrales de Lebesgue no se hace un desarrollo tan detallado, ya queel objetivo de esta sección era dar una simple introducción para realizar la com-paración entre los dos tipos de integrales y posteriormente realizar los diagramascorrespondientes, para facilitar un seguimiento deductivo de las definiciones yteoremas que comprenden estas do clases de integrales.
Es de aclarar que aparte de estas existen mas tipos de integrales que enocasiones abarcan muchas mas funciones de las que abarcan este tipo de inte-grales pero el objetivo del trabajo era dar un primer paso para la comprensión acabalidad de los diferentes tipos de integrales existentes
76
Referencias
[WM78] H. Wilcox, D. Myers, An Introduction to Lebesgue Integration andFourier Series. New York: Dover Publications. (1978)
[BA01] R. Bartle, A Modern Theory of Integration, GSM, 32, RI :AmericanMathematical Society (2001).
[GR01] G. Rubiano, Topología General. Bogotá: Universidad Nacional (2001).
[TA77] T. Apostol, Análisis Matemático. Barcelona: Ed. Reverté (1977).
[UD01] P. Ulyánov, M. Diachenko, Análisis Real. España: Ed. Reverté (2001)
77