Data-driven approximation of vector fields and ...
28
Data-driven approximation of vector fields and differential forms with the spectral exterior calculus Dimitris Giannakis Courant Institute of Mathematical Sciences New York University Advances in Manifold Learning and Applications Joint Mathematics Meetings January 9, 2021 Collaborators: Tyrus Berry, Shuddho Das, Joanna Slawinska
Transcript of Data-driven approximation of vector fields and ...

Data-driven approximationof vector fields and differential forms
with the spectral exterior calculus
Dimitris Giannakis
Courant Institute of Mathematical SciencesNew York University
Advances in Manifold Learning and ApplicationsJoint Mathematics Meetings
January 9, 2021
Collaborators: Tyrus Berry, Shuddho Das, Joanna Slawinska

Approximating the Laplacian on functions
∆ = − div grad = δd︸ ︷︷ ︸manifold Laplacian
←→ L = D −K︸ ︷︷ ︸graph Laplacian
• Pointwise consistency:For fixed f : M → R, L~f converges to ∆f .(Belkin & Niyogi 2003; Coifman & Lafon 2006; Hein et al. 2006; Singer 2006;
Berry & Harlim 2016; Berry & Sauer 2016; Vaughn et al. 2019)
• Spectral consistency:spec L converges to spec ∆, and the eigenspaces also converge.(Belkin & Niyogi 2007; Shi 2015; Trillos & Slepcev 2018; Dunson et al. 2019;
Trillos et al. 2020; Wormell et al. 2020)

Approximating the exterior calculus
d , δ, ∧, ?, ιX , LX︸ ︷︷ ︸manifold operators
←→ d , δ, ∧, ?, ιX , LX︸ ︷︷ ︸discretized operators
• Discrete exterior calculus (DEC):Approximate k-forms using k-simplicial cochains.(Hirani 2003; Desbrun et al. 2005; Rufat et al. 2014)
• Finite-element exterior calculus (FEC):Approximate using a triangulation and associated finite-elementbases.(Arnold et al. 2006, 2010; Budniskiy et al. 2019)
• Fourier space discretizations:Approximate using a chain complex in Fourier space.(Lessig 2021)

Spectral exterior calculus (SEC)
structure
Approximation
of operators
Frames for vector fields
and differential forms
Product rule
for Laplacian on functions
C∞(M)-module
We illustrate the approach with applications to:
1 Computing eigenforms of the 1-Laplacian.
2 Learning vector fields of dynamical systems.

Spectral exterior calculus (SEC)
structure
Approximation
of operators
Frames for vector fields
and differential forms
Product rule
for Laplacian on functions
C∞(M)-module
We illustrate the approach with applications to:
1 Computing eigenforms of the 1-Laplacian.
2 Learning vector fields of dynamical systems.

Product rule (carre du champ identity)
2 grad f · grad g = (∆f )g + f (∆g)−∆(fg), f , g ∈ C∞(M)
Laplace-Beltrami eigenfunctions:
∆φj = λjφj , cijk = 〈φi , φjφk〉,
gradφi · gradφj =1
2
∑k
(λi + λj − λk)cijk .
Consistent approximations of λj , φj , and cijk are available fromdata sampled on M using graph-theoretic techniques.

Product rule (carre du champ identity)
2 grad f · grad g = (∆f )g + f (∆g)−∆(fg), f , g ∈ C∞(M)
Laplace-Beltrami eigenfunctions:
∆φj = λjφj , cijk = 〈φi , φjφk〉,
gradφi · gradφj =1
2
∑k
(λi + λj − λk)cijk .
Consistent approximations of λj , φj , and cijk are available fromdata sampled on M using graph-theoretic techniques.

C∞(M)-module structure
For M compact, gradients of finitely many eigenfunctionsgenerate X(M) as a C∞(M)-module:
v =J∑
j=1
fj gradφj , ∀v ∈ X(M).
• X(M): Space of smooth vector fields on M.
• fj : C∞(M) functions.
• Result follows from Portegies (2014).
Every L2 vector field v has an L2-convergent expansion,
v =∞∑i=0
J∑j=1
vijφi gradφj .
• Analogous results hold for k-forms with grad replaced by d .

C∞(M)-module structure
For M compact, gradients of finitely many eigenfunctionsgenerate X(M) as a C∞(M)-module:
v =J∑
j=1
fj gradφj , ∀v ∈ X(M).
• X(M): Space of smooth vector fields on M.
• fj : C∞(M) functions.
• Result follows from Portegies (2014).
Every L2 vector field v has an L2-convergent expansion,
v =∞∑i=0
J∑j=1
vijφi gradφj .
• Analogous results hold for k-forms with grad replaced by d .

Frames of inner product spaces
A sequence u0, u1, . . . of elements of an inner product space V issaid to be a frame if there exist C1,C2 > 0 such that
C1‖v‖2 ≤∑k
|〈uk , v〉|2 ≤ C2‖v‖2, ∀v ∈ V .
• Analysis operator: T : V → `2, Tv = (〈uk , v〉).
• Synthesis operator: T ∗ : `2 → V , T ∗(ck) =∑
k ckuk .
• Frame operator: S : V → V , S = T ∗T .
• Gram operator: G : `2 → `2, G = TT ∗.
• Dual frame: u′k with u′k = S−1uk ,
v =∑k
〈u′k , v〉V uk =∑k
〈uk , v〉V u′k , ∀v ∈ V .

Frames of inner product spaces
A sequence u0, u1, . . . of elements of an inner product space V issaid to be a frame if there exist C1,C2 > 0 such that
C1‖v‖2 ≤∑k
|〈uk , v〉|2 ≤ C2‖v‖2, ∀v ∈ V .
• Analysis operator: T : V → `2, Tv = (〈uk , v〉).
• Synthesis operator: T ∗ : `2 → V , T ∗(ck) =∑
k ckuk .
• Frame operator: S : V → V , S = T ∗T .
• Gram operator: G : `2 → `2, G = TT ∗.
• Dual frame: u′k with u′k = S−1uk ,
v =∑k
〈u′k , v〉V uk =∑k
〈uk , v〉V u′k , ∀v ∈ V .

SEC frames for vector fields
Theorem 1. The sets
BJX = bij : i ∈ 0, 1, . . ., j ∈ 1, . . . , J ,
BX = bij : i ∈ 0, 1, . . ., j ∈ 1, 2, . . .,
wherebij = φi gradφj , bij = e−λjbij ,
and J is an integer such that x ∈ M 7→ (φ1(x), . . . , φJ(x)) ∈ RJ
is an embedding, are frames for L2X(M).
Proof. Use Cauchy-Schwarz inequalities for Riemannian, Hodge,and `2 inner products, in conjunction with the bounds:
• ‖φj‖L∞ ≤ Cλ(m−1)/4j (Hormander 1968).
• ‖gradφj‖L∞X ≤ Cλ1/2j ‖φj‖L∞ (Shi & Xu 2010).
• j = Cλm/2j + o(λ
(m−1)/2j ) (Weyl 1911).

SEC frames for vector fields
Theorem 1. The sets
BJX = bij : i ∈ 0, 1, . . ., j ∈ 1, . . . , J ,
BX = bij : i ∈ 0, 1, . . ., j ∈ 1, 2, . . .,
wherebij = φi gradφj , bij = e−λjbij ,
and J is an integer such that x ∈ M 7→ (φ1(x), . . . , φJ(x)) ∈ RJ
is an embedding, are frames for L2X(M).
Proof. Use Cauchy-Schwarz inequalities for Riemannian, Hodge,and `2 inner products, in conjunction with the bounds:
• ‖φj‖L∞ ≤ Cλ(m−1)/4j (Hormander 1968).
• ‖gradφj‖L∞X ≤ Cλ1/2j ‖φj‖L∞ (Shi & Xu 2010).
• j = Cλm/2j + o(λ
(m−1)/2j ) (Weyl 1911).

SEC frames for k-forms
Theorem 2a. The sets
BJk = bij1···jk : i ∈ 0, 1, . . . , , j1, . . . , jk ∈ 1, . . . , J,
Bk = bij1···jk : i ∈ 0, 1, . . ., j1, . . . , jk ∈ 1, 2, . . .,
where
bij1···jk = φi dφj1 ∧ · · · ∧ dφjk , bij1···jk = e−(λj1 +···+λjk )bij1···jk ,
are frames for L2k(M).

SEC frames for k-forms
Theorem 2b. The sets
BJ1,1 = bij1 : i ∈ 0, 1, . . ., j ∈ 1, . . . , J,
B1,1 = bij1 : i ∈ 0, 1, . . ., j ∈ 1, 2, . . .,
where
bij1···jk1 =φi‖φi‖H1
dφj1 ∧ · · · ∧ dφjk , bij1···jk1 = e−(λj1 +···+λjk )bij1···jk1 ,
and ‖φi‖H1 =√
1 + λi , are frames for H11 (M).

Eigenforms of 1-Laplacian
∆1 = δd + dδ
∆1ψj = νjψj , ψj ∈ Ω1(M), νj ≥ 0
• Weak form: Find ψj ∈ H11 (M) \ 0 and νj ∈ R such that
〈dω, dψj〉+ 〈δω, δψj〉 = νj〈ω, ψj〉, ∀ω ∈ H11 (M).
• SEC approximation: Matrix generalized eigenvalue problem,
A~uj = νjB~uj ,
νj ≈ νj , ψj =∑ij
uijbij1 ≈ ψj .

Circle
• The eigenforms ϕk of ∆1 are sin(kθ) dθ and cos(kθ) dθ, and theeigenvalues νk are as those of ∆0,
νk ∈ 0, 1, 1, 4, 4, . . . , j2, j2, . . ..
10 20 30 40
n
0
100
200
300
400
500
λn, eig
envalu
es o
f ∆
1
TruthSEC
-1 -0.5 0 0.5 1
x
-1
-0.5
0
0.5
1
y
-1 -0.5 0 0.5 1
x
-1
-0.5
0
0.5
1
y
ν0 ν1
True 0 1SEC 0.0002 1.06

Torus embedded in R3
-1
3
0
2
1
1 2
0
0-1
-2-2
-3
-1
3
0
2
1
1 20
0-1
-2-2
-3
-1
3
0
2
1
12
0
0-1
-2-2
-3
-1
3
0
2
1
1 2
0
0-1
-2 -2-3
ν0 ν1 ν2 ν3 ν4 ν5 ν6 ν7
SEC 0.0040 0.0093 0.2574 0.2575 0.2575 0.2587 0.8061 0.8067

2-sphere
1
0-1
-0.5
1
0
0.5
0.5
0
1
-1-0.5 -1
1
0.5
1
0
0.50-0.5-1
-0.5
1
-10
-1
ν0 ν1 ν2 ν3 ν4 ν5 ν6 ν7
SEC 1.9349 1.9521 1.9781 1.9817 2.0042 2.0172 5.8001 5.8142

Genus-2 surface
-1
0
2
1
0
-2
50-5
-1
0
2
1
0
-2
50-5
-1
0
2
1
0
-2
50-5
-1
3
0
2
1
1
0
-1
-2
50-5
ν0 ν1 ν2 ν3 ν4 ν5 ν6 ν7
SEC 0.0021 0.0026 0.0026 0.0041 0.0893 0.0901 0.2151 0.2175

Mobius band
2
-0.5
1.51
1
0 0.5
0-1
-0.5
-1-2
0
0.5
2
-0.5
1.51
1
0 0.5
0-1
-0.5
-1-2
0
0.5
ν0 ν1 ν2 ν3 ν4 ν5 ν6 ν7
SEC 0.0242 1.0415 1.0449 3.8684 3.8948 8.0352 8.1018 8.9369

Lorenz 63 attractor
-40 -20 0 20 40
x+y
5
10
15
20
25
30
35
40
45
z
-40 -20 0 20 40
x+y
5
10
15
20
25
30
35
40
45
z
ν0 ν1 ν2 ν3 ν4 ν5 ν6 ν7
SEC 0.0011 0.0017 0.0030 0.0072 0.0105 0.0109 0.0205 0.0262

Learning vector fields of dynamical systems
x(t) = v |x(t), v ∈ X(M)
Given:• Embedding F : M → Rd , F =
∑j Fjφj .
• Samples F∗v |xn (“arrows” in Rd).
Learning algorithm:
1 Apply analysis operator, v ′ = Tv = (〈bij , v〉) ∈ `2.(Gives coefficients of v in the dual frame.)
2 Apply dual Gram operator, v = G+v ′ ∈ `2.(Gives coefficients of v in the primal frame.)
3 Reconstruct using synthesis operator, v = T ∗v ∈ X(M).
4 Apply pushforward map into data space, ~v = F∗v = vF .
Procedure is not equivalent to supervised learning of thecoordinate functions F∗v .

Learning vector fields of dynamical systems
x(t) = v |x(t), v ∈ X(M)
Given:• Embedding F : M → Rd , F =
∑j Fjφj .
• Samples F∗v |xn (“arrows” in Rd).
Learning algorithm:
1 Apply analysis operator, v ′ = Tv = (〈bij , v〉) ∈ `2.(Gives coefficients of v in the dual frame.)
2 Apply dual Gram operator, v = G+v ′ ∈ `2.(Gives coefficients of v in the primal frame.)
3 Reconstruct using synthesis operator, v = T ∗v ∈ X(M).
4 Apply pushforward map into data space, ~v = F∗v = vF .
Procedure is not equivalent to supervised learning of thecoordinate functions F∗v .

Variable-speed rotation on circle
θ(t) = v |θ(t) = (eκ cos θ sin θ + 1)2 + 1, κ = 4
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
x
y
Orbit - componentwise reconstruction
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
x
y
Orbit - operator based reconstruction, frames
• Left: Dynamical evolution based on interpolation of F∗v |θ ∈ R2.
• Right: Dynamical evolution based on SEC approximation.

Oxtoby system on 2-torus
θ(t) = v |θ(t)
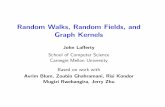
v1(θ) = v2(θ) + (1− α)(1− cos θ2), v2(θ) = α(1− cos(θ1 − θ2))382 D. Giannakis / Appl. Comput. Harmon. Anal. 47 (2019) 338–396
Fig. 16. Time series for the fixed-point system on the 2-torus. (a) Phase space diagram on a periodic box for 64,000 samples; (b, c) components x1 = cos θ1 and x3 = cos θ2 of the standard (flat) embedding F : T2 !→ R4.
α = 201 /2 and the standard (flat) embedding of the 2-torus in R4, F (a) = (cos θ1 , sin θ1 , cos θ2, sin θ2). In what follows, we discuss dimension reduction and forecasting results for this system and observation map using a time series of 128,000 samples initialized at (θ1 , θ2) = (π/2, π/2) and sampled at a timestep T = 0.01.
First, we note that the methods of Section 4 with no time change fail in the initial diffusion maps stage, as the Laplace–Beltrami eigenfunctions computed via Algorithm 1 are corrupted by series of spikes (a hallmark of ill conditioning of the heat kernel matrix P ). We experimented with different kernels, tuning procedures, and normalizations (including the standard α = 1/2 normalization of diffusion maps that requires no den-sity estimation), but in all cases the quality of the eigenfunctions was poor. This ill-conditioning is likely caused by the behavior of the system near the fixed point, where the sampling density through finite-time trajectories has a singular, “one-dimensional” structure (see Fig. 16(a)), even though the asymptotic sam-pling density is uniform with respect to the Haar measure. On the other hand, after time change by the empirically accessible phase-space speed function ξ, the quality of the eigenfunctions from diffusion maps improves markedly. We attribute this improvement to the modified Riemannian metric h from Section 6.3. This metric becomes degenerate near the fixed point where ξ vanishes, assigning arbitrarily small norm to all tangent vectors (this can also be seen from the fact that the kernel in (50) assigns near-maximal affinity to all pairs of points with small corresponding ξ). Therefore, the heat kernel associated with h produces stronger averaging (smoothing) near the fixed point resulting in a well-behaved eigenfunction basis which is crucial to the success of the techniques of Section 6.3.
In what follows, we work with the approximate eigenfunctions for the time-changed vector field computed using the advection–diffusion operator Lε from (51) for the regularization parameter ε = 0.02. We selected this value as a reasonable compromise between bias error and smoothness of the computed eigenfunctions after testing various candidate values of ε in the interval 10−4 to 10−1 . As shown in Fig. 17, the generating eigenfunctions ζ1 , ζ2 for this value of ε do not lie on the unit circle with the same accuracy as the earlier results in Figs. 4 and 13. Nevertheless, the eigenfunctions lie on a narrow annulus about the unit circle, and the corresponding time series have the structure of phase-modulated waves with weak amplitude modulation. The basic frequencies and Dirichlet energies are Ω1 , Ω2 = 0.735, 0.165 and E(ζ1 ), E(ζ2) = 1.54, 2.42. The eigenfunction time series exhibit timescale separation, with ζ1 evolving at faster timescales than ζ2, but this timescale separation has a time-dependent nature in the sense that both time series evolve slowly near the fixed point. The timescale separation between ζ1 and ζ2 is also evident from the scatterplots on the torus in Fig. 17(a), (d). There, it can be seen that the level sets of ζ2 are aligned with the orbits of the dynamics, whereas the level sets of ζ1 are transverse to the dynamics resulting to rapid oscillations due to frequent level-set crossings. As discussed in the SOM, EDMD implemented with a dictionary consisting of lags of the state vector fails to recover Koopman eigenfunctions of comparable quality to those in Fig. 17. In particular, as shown in Fig. 4 in the SOM, the EDMD spectrum contains an eigenfunction that somewhat
α =√
20

Oxtoby system on 2-torus
θ(t) = v |θ(t)
v1(θ) = v2(θ) + (1− α)(1− cos θ2), v2(θ) = α(1− cos(θ1 − θ2))
— true — SEC

Conclusions
A spectral formulation of exterior calculus was developed with anumber of useful features for manifold learning applications:
• The framework is based entirely on the eigenvalues andeigenfunctions of the Laplacian on functions, allowing the use ofgraph-theoretic techniques with well-established consistencyproperties.
• No auxiliary structures such as simplicial complexes are required.
• Classical approaches in approximation theory of operators can beemployed to construct Galerkin schemes for operators such as the1-Laplacian with spectral convergence guarantees.
• Computational cost decoupled from ambient space dimension anddataset size.
Reference
• Berry, T., and D. Giannakis (2020). Spectral exterior calculus.Commun. Pure Appl. Math., 73, 689–770. doi:10.1002/cpa.21885.