corripio
44
Fs () s s 2 ω 2 + = 1 2 1 s i ω ⋅ − 1 s i ω ⋅ + + = s i ω ⋅ − s + i ω ⋅ + 2 s i ω ⋅ − ( ) ⋅ s i ω ⋅ + ( ) = 2s ⋅ 2 s 2 ω 2 + ( ) ⋅ = s s 2 ω 2 + = 1 2 1 − s i ω ⋅ − e si ω ⋅ − ( )t − ∞ 0 ⋅ 1 − s i ω ⋅ + e si ω ⋅ + ( )t − ∞ 0 ⋅ + = 1 2 0 ∞ t e si ω ⋅ − ( )t − ⌠ ⌡ d 0 ∞ t e si ω ⋅ + ( )t − ⌠ ⌡ d + = Fs () 0 ∞ t cos ωt ⋅ e st − ⋅ ⌠ ⌡ d = 0 ∞ t e i ωt ⋅ e i − ωt ⋅ − 2 e st − ⌠ ⌡ d = ft () cos ωt ⋅ = (c) Fs () 1 s a + = Fs () 0 ∞ t e at − e st − ⌠ ⌡ d = 0 ∞ t e sa + ( )t − ⌠ ⌡ d = 1 − s a + e sa + ( )t − ∞ 0 ⋅ = 1 s a + = where a is constant ft () e at − = (b) Fs () 1 s 2 = Fs () t − s e st − ∞ 0 ⋅ 1 s 0 ∞ t e st − ⌠ ⌡ d ⋅ + = 0 0 − 1 s 2 e st − ∞ 0 ⋅ − = 1 s 2 = v 1 − s e st − = du dt = dv e st − dt = u t = By parts: Fs () 0 ∞ t te st − ⋅ ⌠ ⌡ d = ft () t = (a) Fs () 0 ∞ t ft ()e st − ⌠ ⌡ d = Problem 2-1. Derivation of Laplace transforms from its definition Smith & Corripio, 3rd. edition
-
Upload
sabrina-amaral -
Category
Automotive
-
view
57 -
download
0
Transcript of corripio

F s( )s
s2ω
2+
=
12
1s i ω⋅−
1s i ω⋅+
+
= s i ω⋅− s+ i ω⋅+
2 s i ω⋅−( )⋅ s i ω⋅+( )= 2 s⋅
2 s2ω
2+( )⋅
= s
s2ω
2+
=
12
1−s i ω⋅−
e s i ω⋅−( )t−∞
0
⋅1−
s i ω⋅+e s i ω⋅+( )t−
∞
0
⋅+
=
12 0
∞
te s i ω⋅−( )t−⌠⌡
d0
∞
te s i ω⋅+( )t−⌠⌡
d+
=
F s( )0
∞
tcos ωt⋅ e st−⋅
⌠⌡
d=
0
∞
tei ωt⋅ e i− ωt⋅
−
2e st−
⌠⌡
d=f t( ) cos ωt⋅=(c)
F s( )1
s a+=
F s( )0
∞
te at− e st−⌠⌡
d=0
∞
te s a+( )t−⌠⌡
d= 1−s a+
e s a+( )t−∞
0
⋅= 1s a+
=
where a is constantf t( ) e at−=(b)
F s( )1
s2=
F s( )t−
se st−
∞
0
⋅1s 0
∞
te st−⌠⌡
d⋅+= 0 0−1
s2e st−
∞
0
⋅−= 1
s2=
v1−s
e st−=du dt=
dv e st− dt=u t=By parts:F s( )0
∞
tt e st−⋅
⌠⌡
d=f t( ) t=(a)
F s( )0
∞
tf t( ) e st−⌠⌡
d=
Problem 2-1. Derivation of Laplace transforms from its definitionSmith & Corripio, 3rd. edition

(d) f t( ) e at− coss ωt⋅=F s( )
0
∞
te at− cos ωt⋅ e st−⋅
⌠⌡
d=
0
∞
te at− ei ωt⋅ e i− ωt⋅+
2⋅ e st−
⌠⌡
d=
12 0
∞
te s a+ i ω⋅+( )t−⌠⌡
d0
∞
te s a+ i ω⋅−( )− t⌠⌡
d+
=
12
1−s a+ i ω⋅+
e s a+ i ω⋅+( )t−∞
0
⋅1−
s a+ i ω⋅−e s a+ i ω⋅−( )t−
∞
0
⋅+
=
12
1s a+ i ω⋅+
1s a+ i ω⋅−
+
= s a+ i ω⋅− s+ a+ i ω⋅+
2 s a+ i ω⋅+( ) s a+ i ω⋅−( )=
2 s a+( )
2 s a+( )2ω
2+ ⋅
= s a+
s a+( )2ω
2+
= F s( )s a+
s a+( )2ω
2+
=
All the results match results in Table 2-1.1
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.

1s
1s 2+
+ 21
s 1+⋅−= 1
s1
s 2++
2s 1+
−=
F s( )1s
1s 2+
+2
s 1+−=Used the linearity property.
(d) f t( ) u t( ) e t−− t e t−
⋅+= F s( ) L u t( )( ) L e t−( )− L t e t−⋅( )+= 1
s1
s 1+−
1
s 1+( )2+=
F s( )1s
1s 1+
−1
s 1+( )2+=Used the linearity property.
(e) f t( ) u t 2−( ) 1 e 2− t 2−( ) sin t 2−( )− = Let g t( ) u t( ) 1 e 2− tsin t⋅−( )= Then f t( ) g t 2−( )=
F s( ) e 2− s G s( )= e 2− s 1s
1
s 2+( )2 1+−
=
Used the real translation theorem and linearity. F s( ) e 2− s 1s
1
s 2+( )2 1+−
=
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.
Smith & Corripio, 3rd editionProblem 2-2. Derive Laplace transforms from the properties and Table 2-1.1
(a) f t( ) u t( ) 2 t⋅+ 3 t2⋅+= F s( ) L u t( ) 2 t⋅+ 3 t2⋅+( )= L u t( )( ) 2 L t( )⋅+ 3 L t2( )⋅+=
1s
21
s2⋅+ 3
2!
s3⋅+= F s( )
1s
2
s2+
6
s3+=
Used the linearity property.
(b) f t( ) e 2− t⋅ u t( ) 2 t⋅+ 3 t2⋅+( )= F s( ) L u t( ) 2 t⋅+ 3 t2⋅+( )s 2+
⋅= 1s
2
s2+
6
s3+
s 2+
⋅=
1s 2+
2
s 2+( )2+
6
s 2+( )3+=
F s( )1
s 2+
2
s 2+( )2+
6
s 2+( )3+=Used the complex translation theorem.
(c) f t( ) u t( ) e 2− t+ 2e t−
−= F s( ) L u t( ) e 2− t+ 2 e t−
⋅−( )= L u t( )( ) L e 2− t( )+ 2 L e t−( )⋅−=

Must apply L'Hopital's rule:
∞s
11
22 s 2+( )
+6
3 s 2+( )2+
1=lim→Final value:
∞te 2− t u t( ) 2 t⋅+ 3t2+( ) 0 ∞⋅=lim
→0s
s1
s 2+
2
s 2+( )2+
6
s 3+( )2+
0=lim→L'Hopital's rule:
∞t
0
2e2t
2
2e2t+
6t
2e2t+
0=lim
→Check!
(c) f t( ) u t( ) e 2− t+ 2e t−
−= F s( )1s
1s 2+
+2
s 1+−=
Initial value:
0tu t( ) e 2− t
+ 2e t−−( ) 1 1+ 2−( ) 0+=lim
→ ∞ss
1s
1s 2+
+2
s 1+−
∞
∞=lim
→
L'Hopital's rule:
∞s1
11
+21
−
0=lim→
Final value:
∞tu t( ) e 2− t
+ 2e t−−( ) 1 0+ 0+= 1=lim
→ 0ss
1s
1s 2+
+2
s 1+−
1 0+ 0+= 1=lim→
Smith & Corripio, 3rd edition
Problem 2-3. Initial and final value check of solutions to Problem 2-2
(a) f t( ) u t( ) 2 t⋅+ 3t2+= F s( )1s
2
s2+
6
s3+=
Initial value:
0tu t( ) 2t+ 3t2+( ) 1=lim
→ ∞ss
1s
2
s2+
6
s3+
⋅
∞s1
2s
+6
s2+
1=lim
→=lim
→
Final value:
∞tu t( ) 2t+ 3t2+( ) ∞=lim
→ 0s1
2s
+6
s2+
∞=lim
→Check!
(b) f t( ) e 2− t u t( ) 2t+ 3t2+( )= F s( )1
s 2+
2
s 2+( )2+
6
s 2+( )3+=
Initial value:
0te 2− t u t( ) 2t+ 3t2+( )lim
→ ∞ss
1s 2+
2
s 2+( )2+
6
s 2+( )3+
∞
∞=lim
→
1 1 0+ 0+( )= 1=

Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.
Check!
0ss
1s
1
s 1+( )2 1+−
1 0+= 1=lim→∞t
1 e 2− tsin t( )⋅− 1=lim→
Final value:
∞ss
1s
1
s 1+( )2 1+−
1 0−= 1=lim→0t
1 e 2− tsin t⋅−( ) 1=lim→
Initial value:
The test of the delayed fnction is not useful. Better to test the term in brackets, g(t):
F s( ) e 2− s 1s
1
s 1+( )2 1+−
=f t( ) u t 2−( ) 1 e 2− t 2−( ) sin t 2−( )− =(e)
Check!∞t
1 0−1
1 et⋅
+
1=lim
→
L'Hopital's rule:
∞tu t( ) e t−
− t e t−⋅+( ) 1 0− ∞ 0⋅+=lim
→0s
1s
s 1+−
s
s 1+( )2+
1 0− 0+= 1=lim→
Final value: ∞s1
11
−1
2 s 1+( )+
1 1− 0+= 0=lim→
L'Hopital's rule:
∞ss
1s
1s 1+
−1
s 1+( )2+
∞
∞=lim
→0tu t( ) e t−
− t e t−⋅+( ) 1 1− 0 1⋅+= 0=lim
→
Initial value:
F s( )1s
1s 1+
−1
s 1+( )2+=f t( ) u t( ) e t−
− t e t−⋅+=(d)

Smith & Corripio, 3rd editionProblem 2-4. Laplace transform of a pulse by real translation theorem
f t( ) H u t( )⋅ H u t T−( )⋅−=
F s( ) H1s⋅ H e sT−
⋅1s⋅−= H
1 e sT−−
s⋅= F s( )
Hs
1 e sT−−( )=

Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.
0 2 40
2fd t( )
t0 2 4
0
2f t( )
t
f t( ) e
t0
τ e
t−
τ⋅:=
fd t( ) u t t0−( ) e
t t0−( )−
τ⋅:=
u t( ) 0 t 0<if
1 t 0≥if
:=τ 1:=t0 1:=Sketch the functions: F s( )τ e
t0− s⋅⋅
τ s⋅ 1+=
The result to part (b) agrees with the real translation theorem.
et0− s⋅ 1−
s1τ
+
⋅ es
1
τ+
− λ⋅
⋅ ∞
0
⋅= et0− s⋅
s1τ
+
= τ et0− s⋅
⋅
τ s⋅ 1+=
F s( )t0−
∞
λu λ( ) e
λ−
τ es λ t0+( )−
⌠⌡
d= et0− s⋅
0
∞
λes
1
τ+
λ−
⌠⌡
d⋅=λ t t0−=Let
F s( )0
∞
tu t t0−( ) e
t t0−( )−
τ e st−
⌠⌡
d=f t( ) u t t0−( ) e
t t0−( )−
τ=
(b) Function is delayed and zero from t = 0 to t = t0:
F s( )τ e
t0
τ⋅
τ s⋅ 1+=F s( ) e
t0
τ 1
s1τ
+
= τ e
t0
τ⋅
τ s⋅ 1+=f t( ) e
t0
τ e
t−
τ=(from Table 2-1.1)
(a) Function is non-zero for all values of t > 0:f t( ) e
t t0−( )−
τ=
Problem 2-5. Delayed versus non-delayed function

Y t( ) 2.5− e t− 2.5 u t( )+= (Table 2-1.1)
(b)9
d2 y t( )⋅
dt2⋅ 18
d y t( )⋅
dt⋅+ 4 y t( )+ 8 x t( ) 4−=
Initial steady state: 4 y 0( )⋅ 8 x 0( ) 4−=
Subtract:9
d2 Y t( )⋅
dt2⋅ 18
d Y t( )⋅
dt⋅+ 4 Y t( )+ 8 X t( )=
Y t( ) y t( ) y 0( )−= Y 0( ) 0=
X t( ) x t( ) x 0( )−=Laplace transform:
9s2 Y s( ) 18s Y s( )⋅+ 4 Y s( )+ 8 X s( )= 81s⋅=
Solve for Y(s): Y s( )8
9s2 18s+ 4+
1s
= r118− 182 4 9⋅ 4⋅−+
2 9⋅:= r1 0.255−=
r218− 182 4 9⋅ 4⋅−−
2 9⋅:= r2 1.745−=
Expand in partial fractions:Y s( )
89 s 0.255+( ) s 1.745+( )s
=A1
s 0.255+
A2s 1.745+
+A3s
+=
A10.255−s
89 s 1.745+( )s
89 0.255− 1.745+( )⋅ 0.255−( )⋅
= 2.342−=lim→
=
Smith & Corripio, 3rd editionProblem 2-6. Solution of differential equations by Laplace transformsInput function: X t( ) u t( )= X s( )
1s
= (Table 2-1.1)
(a) d y t( )⋅
dt2 y t( )+ 5 x t( ) 3+=
Initial steady state: 2 y 0( ) 5 x 0( )= 3=
Subtract: d Y t( )⋅
dt2 Y t( )+ 5 X t( )= Y t( ) y t( ) y 0( )−= X t( ) x t( ) x 0( )−=
Laplace transform: sY s( ) Y 0( )− 2 Y s( )+ 5 X s( )= 51s⋅= Y 0( ) y 0( ) y 0( )−= 0=
Solve for Y(s):Y s( )
5s 2+
1s
=A1
s 2+
A2s
+=
Partial fractions:A1
2−s
5s
2.5−=lim→
= A20s
5s 2+
2.5=lim→
=
Y s( )5−
s 1+
5s
+= Invert:

Y 0( ) 0=9d2 Y t( )⋅
dt2⋅ 12
d Y t( )⋅
dt⋅+ 4 Y t( )+ 8 X t( )=
Subtract initial steady state:
9d2 y t( )⋅
dt2⋅ 12
d y t( )⋅
dt⋅+ 4 y t( )+ 8 x t( ) 4−=(d)
Y t( ) 1− 1.134i+( )e 0.5− 0.441i+( )t 1− 1.134i−( )e 0.5− 0.441i−( )t+ 2 u t( )+=
Invert using Table 2-1.1:
Y s( )1− 1.134i+
s 0.5+ 0.441i−
1− 1.134i−
s 0.5+ 0.441i++
2s
+=
A30s
8
9s2 9s+ 4+2=lim
→=A2 1− 1.134i−=
89 2 0.441i⋅( ) 0.5− 0.441i+( )
1− 1.134i+=A10.5− 0.441i+s
89 s 0.5+ 0.441i+( ) s
lim→
=
A1s 0.5+ 0.441i−
A2s 0.5+ 0.441i+
+A3s
+=
Y s( )8
9 s 0.5+ 0.441i−( ) s 0.5+ 0.441+( )s=Solve for Y(s), expand:
A21.745−s
89 s 0.255+( )s
89 1.745− 0.255+( ) 1.745−( )
= 0.342=lim→
=
A30s
89 s 0.255+( ) s 1.745+( )
89 0.255( ) 1.745( )
= 2.0=lim→
=
Y s( )2.342−
s 0.255+
0.342s 1.745+
+2s
+=
Invert with Table 2-1.1:Y t( ) 2.342− e 0.255− t 0.342e 1.745− t
+ 2 u t( )+=
(c) 9d2 y t( )⋅
dt2⋅ 9
d y t( )⋅
dt⋅+ 4 y t( )+ 8 x t( ) 4−=
Subtract initial steady state:9
d2 Y t( )⋅
dt2⋅ 9
d Y t( )⋅
dt⋅+ 4 Y t( )+ 8 X t( )= Y 0( ) 0=
Laplace transform:9s2 9s+ 4+( )Y s( ) 8 X s( )= 8
1s⋅=
r19− 92 4 9⋅ 4⋅−+
2 9⋅:= r2
9− 92 4 9⋅ 4⋅−−
2 9⋅:= r1 0.5− 0.441i+=Find roots:
r2 0.5− 0.441i−=

A2 0.027 0.022i−=3
2 2 2.598i⋅( ) 1− 2.598i+( ) 1.5− 2.598i+( )0.027 0.022i+=
A11.5− 2.598i+s
32 s 1.5+ 2.598i+( ) s 0.5+( )s
0.027 0.022i+=lim→
=
A1s 1.5+ 2.598i−
A2s 1.5+ 2.598i+
+A3
s 0.5++
A4s
+=
Y s( )3
2 s 1.5+ 2.598i−( ) s 1.5+ 2.598i+( ) s 0.5+( )s=Solve for Y(s) and expand:
polyroots
9
21
7
2
1.5− 2.598i−
1.5− 2.598i+
0.5−
=
Find roots:
2s3 7s2+ 21s+ 9+( )Y s( ) 3 X s( )= 3
1s⋅=Laplace transform:
Y 0( ) 0=
2d3 Y t( )⋅
dt3⋅ 7
d2 Y t( )⋅
dt2⋅+ 21
d Y t( )⋅
dt⋅+ 9 Y t( )+ 3 X t( )=Subtract initial steady state:
2d3 y t( )⋅
dt3⋅ 7
d2 y t( )⋅
dt2⋅+ 21
d y t( )⋅
dt⋅+ 9 y t( )+ 3 x t( )=(e)
Y t( )4−
3t 2−
e 0.667− t 2 u t( )+=Invert using Table 2-1.1:
A30s
8
9 s 0.667+( )22=lim
→=
A20.667−s
dds
89s
0.667−s
8−
9s22−=lim
→=lim
→=A1
0.667−s
89s
4−3
=lim→
=
Y s( )8
9 s 0.667+( )2s=
A1
s 0.667+( )2
A2s 0.667+
+A3s
+=Solve for Y(s) and expand:
r2 0.667−=
r1 0.667−=r212− 122 4 9⋅ 4⋅−−
2 9⋅:=r1
12− 122 4 9⋅ 4⋅−+
2 9⋅:=
Find roots:
9s2 12s+ 4+( )Y s( ) 8 X s( )= 81s⋅=Laplace transform:

A30.5−s
32 s 1.5+ 2.598i−( ) s 1.5+ 2.598i+( )s
0.387−=lim→
=
32 1 2.598i−( ) 1 2.598i+( ) 0.5−( )
0.387−= A40s
3
2s3 7s2+ 21s+ 9+
13
=lim→
=
Y s( )0.027 0.022i+
s 1.5+ 2.598i−
0.027 0.022i−
s 1.5+ 2.598i++
0.387−
s 0.5++
13
1s
+=
Invert using Table 2-1.1:
Y t( ) 0.027 0.022i+( )e 1.5− 2.598i+( )t 0.027 0.022i−( )e 1.5− 2.598i−( )t+ 0.387e 0.5− t
−13
u t( )+=
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.

Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.
Y t( ) u t 1−( )8−
3t 1−( )⋅ 8−
e 0.667− t 1−( )⋅⋅ 8 e 0.333− t 1−( )⋅
⋅+
⋅=
Apply the real translation theorem in reverse to this solution:
Y s( )8−
31
s 0.667+( )2
8s 0.667+
−8
s 0.333++
e s−=
The partial fraction expansion of the undelayed signal is the same:
(Real translation theorem)
X s( )e s−
s13
+
=X t( ) u t 1−( ) e
t 1−( )−
3=(b) Forcing function:
Y t( )8−
3t 8−
e 0.667− t 8e 0.333− t+=Invert using Table 2-1.1:
Y s( )8−
31
s 0.667+( )2
8−s 0.667+
+8
s 0.333++=
A20.667−s
dds
89 s 0.333+( )
0.667−s
8−
9 s 0.333+( )28−=lim
→=lim
→=
A30.333−s
8
9 s 0.667+( )28=lim
→=A1
0.667−s
89 s 0.333+( )
8−3
=lim→
=
8
9 s 0.667+( )2 s 0.333+( )=
A1
s 0.667+( )2
A2s 0.667+
+A3
s 0.333++=
Y s( )8
9s2 12s+ 4+( ) s13
+
=
X s( )1
s13
+
=From Table 2-1.1:X t( ) e
t−
3=(a) Forcing function:
Y 0( ) 0=9d2 Y t( )⋅
dt2⋅ 12
d Y t( )⋅
dt⋅+ 4 Y t( )+ 8 X t( )=
Problem 2-7. Solve Problem 2-6(d) with different forcing functions
Smith & Corripio, 3rd edition

(Final value theorem)
(b)9
d2 y t( )⋅
dt2⋅ 18
d y t( )⋅
dt⋅+ 4 y t( )+ 8 x t( ) 4−=
Subtract initial steady state: 9d2 Y t( )⋅
dt2⋅ 18
d Y t( )⋅
dt⋅+ 4 Y t( )+ 8 X t( )= Y 0( ) 0=
Laplace transform and solve for Y(s): Y s( )8
9s2 18s+ 4+X s( )=
Find roots: r118− 182 4 9⋅ 4⋅−+
2 9⋅ min:= r2
18− 182 4 9⋅ 4⋅−−
2 9⋅ min:= r1 0.255− min 1−
=
r2 1.745− min 1−=
Invert using Table 2-1.1: Y t( ) A1 e 0.255− t⋅ A2 e 1.745− t
⋅+=
+ terms of X(s)
The response is stable and monotonic. The domnant root is: r1 0.255− min 1−=
Time for the response to decay to 0.67% of its initial value: 5−r1
19.6 min=
Final steady-state value for unit step input:0s
s8
9s2 18s+ 4+⋅
1s
lim→
2→
(Final value theorem)
Smith & Corripio, 3rd editionProblem 2-8. Response characteristics of the equations of Problem 2-6
(a) d y t( )⋅
dt2 y t( )+ 5 x t( ) 3+=
Initial steady state: 2 y 0( ) 5 x 0( ) 3+=
Subtract: d Y t( )⋅
dt2 Y t( )+ 5 X t( )= Y t( ) y t( ) y 0( )−= X t( ) x t( ) x 0( )−=
Laplace transform: s Y s( )⋅ 2 Y s( )+ 5 X s( )= Y 0( ) y 0( ) y 0( )−= 0=
Solve for Y(s): Y s( )5
s 2+X s( )=
A1s 2+
= + terms of X(s)
Invert using Table 2-1.1: Y t( ) A1 e 2− t⋅= + terms of X(t)
The response is stable and monotonic.The dominant and only root is r 2− min 1−:=
Time for response to decay to within 0.67% of its initial value: 5−r
2.5 min=
Final steady-state value for unit step input:
0ss
5s 2+⋅
1s
lim→
52
→ 2.5=

Time for oscillations to die: 5−
0.5− min 1−10 min=
Final steady state value for a unit step imput:0s
s8
9s2 9s+ 4+⋅
1s
lim→
2→
(Final value theorem)
(d) 9d2 y t( )⋅
dt2⋅ 12
d y t( )⋅
dt⋅+ 4 y t( )+ 8 x t( ) 4−=
Subtract initial steady state:9
d2 Y t( )⋅
dt2⋅ 12
d Y t( )⋅
dt⋅+ 4 Y t( )+ 8 X t( )=
Y 0( ) 0=
Laplace transform and solve for Y(s): Y s( )8
9s2 12s+ 4+X s( )=
Find roots: r112− 122 4 9⋅ 4⋅−+
2 9⋅ min:= r2
12− 122 4 9⋅ 4⋅−−
2 9⋅ min:= r1 0.667− min 1−
=
r2 0.667− min 1−=
Invert using Table 2-1.1: Y t( ) A1 t⋅ A2+( )e 0.667− t= + terms of X(t)
(c) 9d2 y t( )⋅
dt2⋅ 9
d y t( )⋅
dt⋅+ 4 y t( )+ 8 x t( ) 4−=
Subtract initial steady state: 9d2 Y t( )⋅
dt2⋅ 9
d Y t( )⋅
dt⋅+ 4 Y t( )+ 8 X t( )= Y 0( ) 0=
Laplace transform and solve for Y(s): Y s( )8
9s2 9s+ 4+X s( )=
Find the roots: r19− 92 4 9⋅ 4⋅−+
2 9⋅ min:= r2
9− 92 4 9⋅ 4⋅−−
2 9⋅ min:= r1 0.5− 0.441i+ min 1−
=
r2 0.5− 0.441i− min 1−=
Invert using Table 2-3.1: Y t( ) D e 0.5− t⋅ sin 0.441t θ+( )= + terms of X(t)
The response is stable and oscillatory. The dominant roots are r1 and r2.
Period of the oscillations: T2π
0.441min 1−:= T 14.25 min=
Decay ratio: e 0.5− min 1− T 0.00081=

Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.
(Final value theorem) 0ss
3
2s3 7s2+ 21s+ 9+
⋅1s
lim→
13
→Final steady state value for a unit step input:
5−r2
10 min=Time for response to die out:e 1.5− min 1− T 0.027=Decay ratio:
T 2.42 min=T2π
2.598min 1−:=The period of the oscillations is:
r2 0.5− min 1−=The response is stable and oscillatory. The dominant root is
r
1.5− 2.598i−
1.5− 2.598i+
0.5−
min 1−
=r polyroots
9
21
7
2
min 1−:=
Find roots:
Y s( )3
2s3 7s2+ 21s+ 9+
X s( )=Laplace transform and solve for Y(s):
2d3 Y t( )⋅
dt3⋅ 7
d2 Y t( )⋅
dt2⋅+ 21
d Y t( )⋅
dt⋅+ 9 Y t( )+ 3 X t( )=Subtract initial steady state:
2d3 y t( )⋅
dt3⋅ 7
d2 y t( )⋅
dt2⋅+ 21
d y t( )⋅
dt⋅+ 9 y t( )+ 3 x t( )=(e)
(Final value theorem) 0ss
8
9s2 12s+ 4+⋅
1s
lim→
2→Final steady state value for a unit step input:
5−r1
7.5 min=Time required for the response to decay within 0.67% of its initial value:
r1 0.667− min 1−=The response is stable and monotonic. The dominant root is

Value of k: kM− g⋅y0
:= k 1.816Nm
=
Laplace transform:M s2⋅ Y s( ) k Y s( )⋅+ F s( )=
Solve for Y(s): Y s( )1
M s2⋅ k+
F s( )=A1
s ikM
⋅−
A2
s ikM
⋅+
+=
+ terms of F(s)
θ 0:=
D 1:=Invert using Table 2-3.1: Y t( ) D sin
kM
t s⋅ θ+
⋅:= + terms of f(t)
The mobile will oscillate forever with a period of T 2πMk
⋅:= T 1.043 s=
Smith & Corripio, 3rd edition
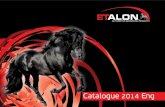
Problem 2-9. Second-Order Response: Bird Mobile
-Mgf(t)
y(t)
-ky(t)
y = 0
Problem data: M 50gm:= y0 27− cm:=
Solution:
Force balance:
Md v t( )⋅
dt⋅ M− g⋅ k y t( )⋅− f t( )+=
Velocity: d y t( )⋅
dtv t( )=
Initial steady state: 0 M− g⋅ k y0⋅−=
Subtract and substitute:
Md2 Y t( )⋅
dt2⋅ k− Y t( )⋅ f t( )+=
Y 0( ) 0=

0 2 41
0
1
Y t( )
t
To more accurately reflect the motion of the bird mobile, we must add the resistance of the air. If we assume it to be a force proportional to the velocity:
Md2 Y t( )⋅
dt2⋅ k− Y t( )⋅ b
d Y t( )⋅
dt⋅− f t( )+=
With this added term the roots will have a negative real part, causing the oscillations to decay, as they do in practice:
Y s( )1
M s2⋅ b s⋅+ k+
F s( )= r1b− b2 4M k⋅−+
2M= b−
2Mi
kM
b2
4M2−⋅+=
Invert:b2 4M k⋅<
Y t( ) D e
b−
2Mt⋅
⋅ sinkM
b2
4M2− t θ+
= + terms of f(t)
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.

H 1:=T 1:=τ 1:=KH 1:=Invert using Table 2-1.1, and the real translation theorem:
Y s( ) K H1s
1
s1τ
+
−
⋅ 1 e sT−−( )=
A20s
K H⋅τ s⋅ 1+
K H⋅=lim→
=A11−
τs
K H⋅τ s⋅
K− H⋅=lim
→
=
Y s( )K
τ s⋅ 1+H⋅
1 e sT−−
s⋅=
A1
s1τ
+
A2s
+
1 e sT−−( )=Substitute:
X s( ) H1 e sT−−
s⋅=
From Example 2-1.1b:
(b) Pulse of Fig. 2-1.1b0 2 4
0
0.5
1
Y t( )
t
Y t( )Kτ
e
t−
τ:=
Invert using Table 2-1.1:
Y s( )K
τ s⋅ 1+=
X s( ) 1=From Table 2-1.1:X t( ) δ t( )=(a) Unit impulse:
Y s( )K
τ s⋅ 1+X s( )=Laplace transform and solve for Y(s):
Y 0( ) 0=τd Y t( )⋅
dt⋅ Y t( )+ K X t( )⋅=
Problem 2-10. Responses of general first-order differential equation
Smith & Corripio, 3rd edition

Y t( ) KH u t( ) e
t−
τ− u t T−( ) 1 e
t T−( )−
τ−
⋅−
⋅:=
X t( ) H u t( ) u t T−( )−( )⋅:=
0 2 40
0.5
1
Y t( )
X t( )
t
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.

Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.
The tank is an integrating process because its ouput, the level, is the time integral of its input, the inlet flow.
0 5 100
5
10
h t( )
t
f(t)
h(t)
A 1:=
h t( )1A
t:=Invert using Table 2-1.1:H s( )1A
1
s2=Substitute:
(Table 2-1.1)F s( )1s
=f t( ) u t( )=Response to a unit step in flow:
H s( )F s( )
1A s⋅
=Transfer function of the tank:
H s( )1
A s⋅F s( )=Laplace transform and solve for H(s):
h 0( ) 0=Ad h t( )⋅
dt⋅ f t( )=
Problem 2-11. Response of an integrating process
Smith & Corripio, 3rd edition

r2 1.745− min 1−=
τe21−
r2:=
τe2 0.573 min=
5 τe1⋅ 19.64 min=Time for response to decay within 0.67% of its initial value:
(b) 9d2 y t( )⋅
dt2⋅ 9
d y t( )⋅
dt⋅+ 4 y t( )+ 8 x t( ) 4−=
Subtract initial steady stateand divide by the Y(t) coefficient:
94
d2 Y t( )⋅
dt2⋅
94
d Y t( )⋅
dt⋅+ Y t( )+ 2 X t( )= Y 0( ) 0=
Compare coefficients to standard form: τ94
min:= τ 1.5 min= ζ9min4 2⋅ τ⋅
:= ζ 0.75=
K 2:=
Underdamped.Find roots: r19− 92 4 9⋅ 4⋅−+
2 9⋅ min:= r1 0.5− 0.441i+ min 1−
=
Frequency of oscillations: ω 0.441radmin
:= Period of oscillations: T2πω
:= T 14.25 min=
Smith & Corripio, 3rd edition
Problem 2-12. Second-order differeential equations of Problem 2-6.
Standard form of the second-order equation: τ2 d2 Y t( )⋅
dt2⋅ 2 ζ⋅ τ⋅
d Y t( )⋅
dt⋅+ Y t( )+ K X t( )⋅=
(b) 9d2 y t( )⋅
dt2⋅ 18
d y t( )⋅
dt⋅+ 4 y t( )+ 8 x t( ) 4−=
Subtract the initial steady state:9
d2 Y t( )⋅
dt2⋅ 18
d Y t( )⋅
dt⋅+ 4 Y t( )+ 8 X t( )= Y 0( ) 0=
Divide by Y(t) coefficient: 94
d2 Y t( )⋅
dt2⋅
184
d Y t( )⋅
dt⋅+ Y t( )+ 2 X t( )=
Match coeffients to standard form:τ
94
min:= τ 1.5 min= ζ18min4 2⋅ τ⋅
:= ζ 1.5=Equivalent time constants:
K 2:= Overdamped.
Find roots: r118− 182 4 9⋅ 4⋅−+
2 9⋅ min:= r1 0.255− min 1−
= τe11−
r1:= τe1 3.927 min=
r218− 182 4 9⋅ 4⋅−−
2 9⋅ min:=

ζ 1=
K 2:= Critically damped.Equivalent time constants:
Find roots: r112− 122 4 9⋅ 4⋅−+
2 9⋅ min:= r1 0.667− min 1−
= τe11−
r1:= τe1 1.5 min=
r212− 122 4 9⋅ 4⋅−−
2 9⋅ min:= r2 0.667− min 1−
= τe21−
r2:= τe2 1.5 min=
Time for response to decay to within 0.67% of its initial value: 5 τe1⋅ 7.5 min=
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.
Decay ratio: e 0.5− min 1− T 0.00081= Percent overshoot:e
0.5− min 1− T
2 2.8 %=
Rise time: T4
3.56 min= Settling time: 5−
0.5− min 1−10 min=
(c) 9d2 y t( )⋅
dt2⋅ 12
d y t( )⋅
dt⋅+ 4 y t( )+ 8 x t( ) 4−=
Subtract initial steady state anddivide by the coefficient of Y(t): 9
4d2 Y t( )⋅
dt2⋅ 3
d Y t( )⋅
dt⋅+ Y t( )+ 2 X t( )=
Y 0( ) 0=
Compare coefficients to standard form:τ
94
min:= τ 1.5 min= ζ3min2 τ⋅
:=

Y s( ) K ∆x1−τ
1
s1τ
+
2
1
s1τ
+
−1s
+
⋅=
A21−
τs
dds
K ∆x⋅
τ2s
1−
τs
K− ∆x⋅
τ2
s2K− ∆x⋅=lim
→
=lim
→
=
A30s
K ∆x⋅
τ s⋅ 1+( )2K ∆x⋅=lim
→=A1
1−
τs
K ∆x⋅
τ2s
K− ∆x⋅
τ=lim
→
=
Y s( )K
τ s⋅ 1+( )2∆xs
=A1
s1τ
+
2
A2
s1τ
+
+A3s
+=
Step response for the critically damped case:
Y t( ) K ∆x u t( )τe1
τe1 τe2−e
t−
τe1−
τe2τe2 τe1−
e
t−
τe2−
⋅=
(2-5.10)Invert using Table 2-1.1:
Y s( ) K ∆xτe1−
τe1 τe2−
1
s1τe1
+
τe2τe2 τe1−
1
s1τe2
+
−1s
+
⋅=
A30s
K ∆x⋅
τe1 s⋅ 1+( ) τe2 s⋅ 1+( )K ∆x⋅=lim
→=
A2K− ∆x⋅ τe2⋅
τe2 τe1−=A1
1−
τe1s
K ∆x⋅
τe1 τe2⋅ s1τe2
+
⋅ s
K− ∆x⋅ τe1⋅
τe1 τe2−=lim
→
=
Y s( )K
τe1 s⋅ 1+( ) τe2 s⋅ 1+( )∆xs
=A1
s1τe1
+
A2
s1τe2
+
+A3s
+=
X s( )∆xs
=Step response, over-damped second-order differential equation:
Problem 2-13. Partial fraction expansion coefficients for Eqs. 2-5.10 to 2-5.13
Smith & Corripio, 3rd edition

Y s( )K
τ s⋅ 1+( )2r
s2=
A1
s1τ
+
2
A2
s1τ
+
+A3
s2+
A4s
+=
Ramp response for critically damped case:
Y t( ) K rτe1
2
τe1 τe2−e
t−
τe1 τe22
τe2 τe1−e
t−
τe2+ t+ τe1 τe2+( )−
⋅=(2-5.12)
Invert using Table 2-1.1:
Y s( ) K rτe1
2
τe1 τe2−
1
s1τe1
+
τe22
τe2 τe1−
1
s1τe2
+
+1
s2+
τe1 τe2+
s−
⋅=
K r τe1− τe2−( )⋅=
A40s
dds
K r⋅τe1 s⋅ 1+( ) τe2 s⋅ 1+( )⋅
⋅0s
K r⋅τe1− τe2 s⋅ 1+( )⋅ τe2 τe1 s⋅ 1+( )⋅−
τe1 s⋅ 1+( )2 τe2 s⋅ 1+( )2⋅lim
→=lim
→=
A30s
K r⋅τe1 s⋅ 1+( ) τe2 s⋅ 1+( )⋅
K r⋅=lim→
=
A2K r⋅ τe2
2⋅
τe2 τe1−=A1
1−
τe1s
K r⋅
τe1 τe2⋅ s1τe2
+
⋅ s2
⋅
K r⋅ τe12
⋅
τe1 τe2−=lim
→
=
Y s( )K
τe1 s⋅ 1+( ) τe2 s⋅ 1+( )⋅
r
s2=
A1
s1τe1
+
A2
s1τe2
+
+A3
s2+
A4s
+=
X s( )r
s2=Ramp response for the over-damped case:
Y t( ) K ∆x u t( )tτ
1+
e
t−
τ−
⋅=(2-5.11)
Invert using Table 2-1.1:

A11−
τs
K r⋅
τ2
s2K r⋅=lim
→
= A30s
K r⋅
τ s⋅ 1+( )2K r⋅=lim
→=
A21−
τs
dds
K r⋅
τ2
s2
1−
τs
2−K r⋅
τ2
s3⋅ 2 K⋅ r⋅ τ⋅=lim
→
=lim
→
=
A40s
dds
K r⋅
τ s⋅ 1+( )2
0s
2−K r⋅ τ⋅
τ s⋅ 1+( )3⋅ 2− K⋅ r⋅ τ⋅=lim
→=lim
→=
Y s( ) K r1
s1τ
+
2
2 τ⋅
s1τ
+
+1
s2+
2 τ⋅
s−
⋅=
Invert using Table 2-1.1:Y t( ) K r⋅ t 2 τ⋅+( )e
t−
τ t+ 2 τ⋅−
⋅= (2-5.13)
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.

Smith & Corripio, 3rd edition
X s( )∆xs
=Problem 2-14. Derive step reponse of n lags in series
Y s( )K
1
n
k
τk s⋅ 1+( )∏=
∆xs
=A0s
1
n
k
Ak
s1τk
+∑=
+=
A00s
K ∆x⋅
1
n
k
τk s⋅ 1+( )∏=
K ∆x⋅=lim→
=
Invert using Table 2-1.1:Y t( ) K ∆x⋅ u t( )⋅
1
n
k
Ak e
t−
τk⋅∑
=
+=
Ak1−
τks
K ∆x⋅
s
1 j k≠( )⋅
n
j
s1τ j
+
∏=
⋅
1
n
j
τ j∏=
⋅
K ∆x⋅
1−τk 1 j k≠( )
n
j
1−τk
1τ j
+
1
n
j
τ j∏=
⋅∏=
⋅
=lim
→
=
K− ∆x⋅
1τk
1
τkn 1−
⋅ τk⋅
1 j k≠( )⋅
n
j
τk τ j−( )∏=
⋅
=K− ∆x⋅ τk
n 1−⋅
1 j k≠( )
n
j
τk τ j−( )∏=
=
Substitute:
Y t( ) K ∆x u t( )
1
n
k
τkn 1−
1 j k≠( )
n
j
τk τ j−( )∏=
e
t−
τk∑=
−
⋅= (2-5.23)
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.

r1τ1 τ2+( )− τ1 τ2+( )2 4τ1 τ2 1 k2−( )⋅−+
2 τ1⋅ τ2⋅=
(b) The response is stable if both roots are negative if 0 < k2 < 1.
This term is positive as long as τ1, τ2, and k2 are positive, so the response is overdamped.
τ1 τ2−( )2 4τ1 τ2⋅ k2⋅+=
τ12
2τ1 τ2⋅− τ22
+ 4τ1 τ2⋅ k2⋅+=
τ1 τ2+( )2 4τ1 τ2⋅ 1 k2−( )⋅− τ12
2τ1 τ2⋅+ τ22
+ 4τ1 τ2⋅− 4τ1 τ2⋅ k2⋅+=
(a) The response is overdamped if the term in the radical is positive:
r1τ1 τ2+( )− τ1 τ2+( )2 4τ1 τ2 1 k2−( )⋅−+
2 τ1⋅ τ2⋅=
τ1 τ2⋅ s2⋅ τ1 τ2+( )s+ 1+ k2− 0=
Find the roots of the denominator:
ζτ1 τ2+
2 τ⋅ 1 k2−( )⋅=
τ1 τ2+
2 τ1 τ2⋅ 1 k2−( )⋅⋅=Damping ratio:
ττ1 τ2⋅
1 k2−=Time constant:K
k11 k2−
=Gain:Comparing coefficients:
Y s( )
k1
1 k2−
τ1 τ2⋅
1 k2−
s2 τ1 τ2+
1 k2−s+ 1+
X s( )=
Rerrange interacting equation:
Y s( )K
τ2
s2 2ζ τ⋅ s⋅+ 1+
X s( )=
Standard form of the second-order differential equaton, Eq. 2-5.4:
Y s( )k1
τ1 s⋅ 1+( ) τ2 s⋅ 1+( )⋅ k2−X s( )=
k1
τ1 τ2⋅ s2⋅ τ1 τ2+( )s+ 1+ k2−
X s( )=
Problem 2-15. Transfer function of second-order interacting systems.Smith & Corripio, 3rd edition

If τ1, τ2, and k2 are positive, and if k2 < 1, then the positive term in the numerator is always less in magnitude than the negative term, and the root is negative. The other root has to be negative because both terms in the numerator are negative. So, the response is stable.
(c) Effective time constants
As the response is overdamped, we can derive the formulas for the two effective time constants. These are the negative reciprocals of the two real roots:
τe12 τ1⋅ τ2⋅
τ1 τ2+ τ1 τ2−( )2 4τ1 τ2⋅ k2⋅+−
= τe12 τ1⋅ τ2⋅
τ1 τ2+ τ1 τ2−( )2 4τ1 τ2⋅ k2⋅++
=
The first of these is the dominant time constant.
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.

Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.
The response canot be unstable for positive Kc. The time constant and damping ratio are always real and positive for positive gain.
Cannot be undamped for finite Kc.ζ 0=(iii) Undamped:
ζ cannot be negative for positive Kc13
Kc< ∞<0 ζ< 1<(ii) Underdamped:
Kc13
<43
1 Kc+>2
3 1 Kc+( )1>ζ 1>(i) Overdamped:
Ranges of the controller gain for which the response is:
ζ4
2 τ⋅ 1 Kc+( )⋅= 2
3 1 Kc+( )⋅=Damping ratio:
τ3
1 Kc+=Time constant:K
Kc1 Kc+
=Gain:
C s( )
Kc
1 Kc+
31 Kc+
s2 41 Kc+
s+ 1+
R s( )=
Rearrange feedback loop transfer function and compare coefficients:
C s( )K
τ2
2ζ τ⋅ s⋅+ 1+
R s( )=Standard second-order transfer function, Eq. 2-5.4:
This is a second-order process with a proportional controller.
C s( )Kc
3s 1+( ) s 1+( )⋅ Kc+R s( )=
Kc
3s2 4s+ 1+ Kc+=
Problem 2-16. Transfer function of a second-order feedback control loop
Smith & Corripio, 3rd edition

Y X t( )( )α
1 α 1−( )xb+ 2
X t( )=
Y X t( )( ) y x t( )( ) y xb( )−=X t( ) x t( ) xb−=Let
y x t( ) y xb( )1 α 1−( ) xb⋅+ α⋅ α xb⋅ α 1−( )⋅−
1 α 1−( )xb+ 2
x t( ) xb−( )+=
y x t( )( )α x t( )⋅
1 α 1−( )x t( )+=
(c) Eqilibrium mole fraction by relative volatility, Eq. 2-6.3:
PoΓ t( )( )
B po⋅ Tb( )
Tb C+( )2Γ t( )=
PoΓ t( )( ) po T t( )( ) po Tb( )−=Γ t( ) T t( ) Tb−=Let
po T t( )( ) po Tb( ) B
Tb C+( )2e
AB
Tb C+−
T t( ) Tb−( )+=
po T t( )( ) eA
B
T t( ) C+−
=
(b) Antoine equation for vapor pressure, Eq. 2-6.2:
Hd Γ t( )( ) a1 2a2 Tb⋅+ 3a3 Tb2
⋅+ 4a4 Tb3
⋅+
Γ t( )=
Hd Γ t( )( ) H T t( )( ) H Tb( )−=Γ t( ) T t( ) Tb−=Let
H T t( )( ) H Tb( ) a1 2a2 Tb⋅+ 3a3 Tb2
⋅+ 4a4 Tb3
⋅+
T t( ) Tb−( )+=
H T t( )( ) H0 a1 T t( )⋅+ a2 T2⋅ t( )⋅+ a3 T3
⋅ t( )+ a4 T4⋅ t( )+=
(use subscript b for base value)(a) Enthalpy as a function of temperature, Eq. 2-6.1:
Problem 2-17. Linearization of common process model functions.
Smith & Corripio, 3rd edition

(d) Flow as a function of pressure drop, Eq. 2-6.4:
f ∆p t( )( ) k ∆p t( )⋅=
f ∆p t( )( ) f ∆pb( ) k
2 ∆pb⋅∆p t( ) ∆pb−( )+=
Let ∆P t( ) ∆p t( ) ∆pb−= F ∆P t( )( ) f ∆p t( )( ) f ∆pb( )−=
F ∆P t( )( ) k
2 ∆pb⋅∆P t( )=
(e) Radiation heat transfer rate as a function of temperature, Eq. 2-6.5:
q T t( )( ) ε σ⋅ A⋅ T4⋅ t( )=
q T t( )( ) q Tb( ) 4 ε⋅ σ⋅ A⋅ Tb3
⋅ T t( ) Tb−( )+=
Let Γ t( ) T t( ) Tb−= Q Γ t( )( ) q T t( )( ) q Tb( )−=
Q Γ t( )( ) 4 ε⋅ σ⋅ A⋅ Tb3
⋅ Γ t( )⋅=
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.

Tmax 610 K= Tmin 590 K=
Temperature range for which the heat transfer rate is within 5% of the linear approximation:
error ε σ⋅ A⋅ T4⋅ ε σ⋅ A⋅ Tb
4⋅ 4ε σ⋅ A⋅ Tb
3⋅ T Tb−( )+
−= 0.05 ε σ⋅ A T4
⋅⋅( )=
Simplify and rearrange: T4 4 Tb3
⋅ T⋅− 3Tb4
+ 0.05T4=
As the error is always positive, the absolute value brackets can be dropped. Rearrange into a polynomial and find its roots:
0.95TTb
44
TTb
− 3+ 0=
polyroots
3
4−
0
0
0.95
1.014− 1.438i−
1.014− 1.438i+
0.921
1.108
=
Ignore the complex roots. The other two roots are the lower and upper limits of the range:
0.921TTb
≤ 1.108≤
For Tb 400K:= Tmin 0.921 Tb⋅:= Tmax 1.108Tb:= Tmin 368 K= Tmax 443 K=
Smith & Corripio, 3rd edition
Problem 2-18. Linearization of radiation heat transfer--range of accuracy.
q T( ) 4ε σ⋅ A⋅ T4⋅= Use subscript "b" for base value for linearization.
From the solution to Problem 2-17(e), the slope is: d q T( )⋅
dT4 ε⋅ σ⋅ A⋅ T3
⋅=
Temperature range for which the slope is within 5% of the slope at the base valueK 1.8R:=
error 4 ε⋅ σ⋅ A⋅ T3⋅ 4 ε⋅ σ⋅ A⋅ Tb
3⋅−= 0.05 4 ε⋅ σ⋅ A⋅ Tb
3⋅
⋅=
Tmax3 1.05 Tb= 1.0164Tb=T
Tb
31− 0.05=Simplify and rearrange:
Tmin3 0.95 Tb= 0.983Tb=
For Tb 400K:= Tmax3 1.05 Tb:= Tmin
3 0.95 Tb:= Tmax 407 K= Tmin 393 K=
Tb 600K:= Tmax3 1.05 Tb:= Tmin
3 0.95 Tb:=

Tb 600K:= Tmin 0.921 Tb⋅:= Tmax 1.108Tb:= Tmin 553 K= Tmax 665 K=
So the range for which the linear approximation is within 5% of the heat rate is much wider than the range for which the value of the slope is within 5% of the actual slope. We must keep in mind that the parameters of the dynamic model are a function of the slope, not the heat rate.
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.

0 x≤ 0.362≤
(b) xmin 1.1 0.9,( ) 0.637= xmax 1.1 0.9,( ) 1.183= (one) 0.637 x≤ 1≤
(c) xmin 5 0.1,( ) 0.092= xmax 5 0.1,( ) 0.109= 0.092 x≤ 0.109≤
(d) xmin 5 0.9,( ) 0.872= xmax 5 0.9,( ) 0.93= 0.872 x≤ 0.93≤
The range of accuracy is narrower the higher α and the higher xb.
For the vapor composition: y x( )α x⋅
1 α 1−( )x+=
error
α x⋅
1 α 1−( )x+
α xb⋅
1 α 1−( )xb+
α
1 α 1−( )xb+ 2
x xb−( )+
1−= 0.05=
α x⋅1 α 1−( )x+
1 α 1−( )xb+ 2
α xb 1 α 1−( )xb+ ⋅ α x⋅+ α xb⋅−1− 0.05=
The error is always negative, so we can change signs and drop the absolute value bars:
Smith & Corripio, 3rd editionProblem 2-19. Equilibrium vapor composition--range of accuracy
y x( )α x⋅
1 α 1−( )x+= Use subscript "b" for base value for linearization.
From the solution to Problem 2-17(c): d y x( )⋅
dxα
1 α 1−( )x+ 2
=
For the slope:error
α
1 α 1−( )x+ 2
α
1 α 1−( )xb+ 2
−= 0.05α
1 α 1−( )xb+ 2
=
Simplify and rearrange: 1 α 1−( )xb+
1 α 1−( )x+
2
1− 0.05=
Lower limit:1 α 1−( )xb+
1 α 1−( )xmin+1.05= xmin α xb,( )
1 α 1−( )xb+ 1.05−
1.05 α 1−( ):=
Upper limit: 1 α 1−( )xb+
1 α 1−( )xmax+0.95= xmax α xb,( )
1 α 1−( )xb+ 0.95−
0.95 α 1−( ):=
(a) xmin 1.1 0.1,( ) 0.143−= (zero) xmax 1.1 0.1,( ) 0.362=

0.40 x≤ 1≤
(c) α 5:= xb 0.1:=
polyroots
0.95 α 1−( )⋅
0.05− α 1−( )2 xb0.05xb
− 2 α 1−( )−
0.95 α 1−( )
0.605
1.653
=
xmin 0.605xb:= xmax 1.653xb:= xmin 0.061= xmax 0.165= 0.061 x≤ 0.165≤
(d) α 5:= xb 0.9:=
polyroots
0.95 α 1−( )⋅
0.05− α 1−( )2 xb0.05xb
− 2 α 1−( )−
0.95 α 1−( )
0.577
1.732
=
xmin 0.577xb:= xmax 1.732xb:= xmin 0.519= xmax 1.559= 0.519 x≤ 1≤
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.
1 α 1−( )xb+ 2α x⋅ 0.95 1 α 1−( )x+ α α 1−( ) xb
2α x⋅+
=
0.95 α 1−( )⋅ x2⋅ 0.95 α 1−( )2⋅ xb
2⋅ 0.95+ 1− 2 α 1−( )⋅ xb⋅− α 1−( )2 xb
2⋅−
x⋅+ 0.95 α 1−( )⋅ xb⋅+
0.95 α 1−( ) xxb
20.05− α 1−( )2⋅ xb
0.05xb
− 2 α 1−( )−
xxb⋅+ 0.95 α 1−( )+ 0=
Find the roots, one is the lower limit and the other one the upper limit:
(a) α 1.1:= xb 0.1:=
polyroots
0.95 α 1−( )⋅
0.05− α 1−( )2 xb0.05xb
− 2 α 1−( )−
0.95 α 1−( )
0.138
7.231
=
xmin 0.138xb:= xmax 7.231xb:= xmin 0.014= xmax 0.723= 0.014 x≤ 0.723≤
(b) α 1.1:= xb 0.9:=
polyroots
0.95 α 1−( )⋅
0.05− α 1−( )2 xb0.05xb
− 2 α 1−( )−
0.95 α 1−( )
0.444
2.25
=
xmin 0.444xb:= xmax 2.25xb:= xmin 0.4= xmax 2.025=

2 k⋅ cAb⋅ cBb⋅ 2 hr 1−= k cAb
2⋅ 2 hr 1−
=
R CA t( ) CB t( ),( ) 2hr 1− CA t( ) 2hr 1− CB t( )+=
For cA 3kmole
m3:= 2 k⋅ cA⋅ cBb⋅ 2 k⋅ cAb⋅ cBb⋅− 1 hr 1−
=
(off by 50%)
k cA2
⋅ k cAb2
⋅− 2.5 hr 1−= (off by 125%)
For cB 2kmole
m3:= 2 k⋅ cAb⋅ cB⋅ 2 k⋅ cAb⋅ cBb⋅− 2 hr 1−
=
(off by 100%)
k cAb2
⋅ k cAb2
⋅− 0 hr 1−= (same as the base value)
These errors on the parameters of the linear approximation are significant, meaning that it is only valid for very small deviations of the reactant concentrations from their base values.
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.
Smith & Corripio, 3rd edition
Problem 2-20. Linearization of chemical reaction rate. kmole 1000mole:=
r cA t( ) cB t( ),( ) k cA t( )2⋅ cB t( )= Use subscript "b" for base value for linearization.
Problem parameters: k 0.5m6
kmole2hr:= cAb 2
kmole
m3:= cBb 1
kmole
m3:=
Linearize: r cA t( ) cB t( ),( ) r cAb cBb,( ) 2k cAb⋅ cBb cA t( ) cAb−( )⋅+ k cAb2
⋅ cB t( ) cBb−( )+=
Let R CA t( ) CB t( ),( ) r cA t( ) cB t( ),( ) r cAb cBb,( )−= CAb t( ) cA t( ) cAb−=
CB t( ) cB t( ) cBb−=
R CA t( ) CB t( ),( ) 2k cAb⋅ cBb⋅ CA t( )⋅ k cAb2
⋅ CB t( )⋅+=
At the given base conditions:

degC K:= mmHgatm760
:= mole% %:=
Numerical values for benzene at: pb 760mmHg:= Tb 95degC:= xb 50mole%:=
A 15.9008:= B 2788.51degC:= C 220.80degC:=
Let pob po Tb( )=
pob e
AB
Tb C+−
mmHg:= pob 1177 mmHg=
xb B⋅ pob⋅
pb Tb C+( )2⋅0.022
1degC
=pobpb
1.549=pob xb⋅
pb2
0.001021
mmHg=
Smith & Corripio, 3rd edition
Problem 2-21. Linearization of Raoult's Law for equilibrium vapor composition.
Raoult's Law: y T t( ) p t( ), x t( ),( )po T t( )( )
p t( )x t( )= po T t( )( ) e
AB
T t( ) C+−
=
Linearize: Use subscript "b" for base value for linearization.
y T t( ) p t( ), x t( ),( ) y Tb pb, xb,( )xbpb
δ
δT⋅ po T t( )( )⋅ ⋅ T t( ) Tb−( )⋅+
po Tb( )pb
x t( ) xb−( )+=
po− Tb( )xb
pb2
p t( ) pb−( )+
δ
δTeA
B
T t( ) C+−
⋅B
Tb C+( )2e
AB
Tb C+−
⋅=B po⋅ Tb( )⋅
Tb C+( )2=
Let Y Γ t( ) P t( ), X t( ),( ) y T t( ) p t( ), x t( ),( ) y Tb pb, xb,( )−= Γ t( ) T t( ) Tb−= P t( ) p t( ) pb−=
X t( ) x t( ) xb−=
Y Γ t( ) P t( ), X t( ),( )xb B⋅ po
⋅ Tb( )⋅
pb Tb C+( )2⋅Γ t( )
po Tb( )pb
X t( )+po Tb( ) xb⋅
pb2
P t( )−=

Y Γ t( ) P t( ), X t( ),( ) 0.022degC
Γ t( ) 1.549 X t( )+0.00102mmHg
P t( )−=
pob xb⋅
pb77.441 %= y Tb pb, xb,( ) 77.44mole%=
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.

From the initial steady state: 0 fb cA.b cAb−( )⋅ k Tb( ) V⋅ cAb⋅−=
cAbfb cAib⋅
fb kb V⋅+:= cAb 9.231 10 5−
×kmole
m3=
Calculate parameters: τV
fb kb V⋅+:= K1
cAib cAb−
fb V kb⋅+:= K2
fbfb V kb⋅+
:= τ 0.01 s=
K1 0.046s kmole⋅
m6=
K3V− kb⋅ E⋅ cAb⋅
1.987kcal
kmole K⋅Tb
2⋅ fb V kb⋅+( )⋅
:=
K2 7.692 10 6−×=
fb V kb⋅+ 260.002m3
s= K3 3.113− 10 6−
×kmol
m3K=
Linearized equation:
0.01 sec⋅d CA t( )⋅
dt⋅ CA t( )+ 0.046
kmole
m3
s
m3F t( ) 7.692 10 6−
⋅ CAi t( )+ 3.113kmole
m3KΓ t( )−=
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.
Smith & Corripio, 3rd edition
Problem 2-22. Linearization of reactor of Examples 2-6.4 and 2-6.1.
From the results of Example 2-6.4: τd CA t( )⋅
dt⋅ CA t( )+ K1 F t( )⋅ K2 CAi t( )⋅+ K3 Γ t( )⋅+=
Use subscript "b" for base value for linearization.
τV
fb V k Tb( )⋅+= K1
cAib cAb−
fb V k Tb( )⋅+= K2
fbfb V k Tb( )⋅+
= K3V− k Tb( )⋅ E cAb⋅
R Tb2
⋅ fb V k Tb( )⋅+( )=
Problem parameters: V 2.6m3:= fb 0.002
m3
s:= cAib 12
kmole
m3:=
Let kb k Tb( )=Tb 573K:= kb 100s 1−
:= E 22000kcal
kmole:=

p t( ) ρ t( )v2 t( )
2⋅ po+= v t( ) 2
p t( ) po−( )ρ t( )
⋅=
Flow through the orifice caused by the bullet: wo t( ) ρ t( ) Ao⋅ v t( )⋅= Ao 2 ρ t( )⋅ p t( ) po−( )⋅⋅=
Ideal gas law: ρ t( )M p t( )⋅
Rg T 273K+( )⋅=
Substitute into mass balance:
V M⋅Rg T 273 K⋅+( )⋅
d p t( )⋅
dt⋅ wi t( ) Ao
2 M⋅Rg T 273K+( )⋅
p t( ) p t( ) po−( )⋅−=
Solve for the derivative:
d p t( )⋅
dtg wi t( ) p t( ),( )=
Rg T 273K+( )⋅
V M⋅wi t( ) Ao
2 M⋅Rg T 273K+( )⋅
p t( ) p t( ) po−( )⋅⋅−
=
Linearize: d p t( )⋅
dtδ g⋅δ wi⋅
b
⋅ wi t( ) wb−( ) δ g⋅δ p⋅
b
⋅ p t( ) pb−( )+=
Let P t( ) p t( ) pb−= Wi t( ) wi t( ) wb−=
a1δ g⋅δ wi⋅
b
⋅= a1Rg T 273K+( )⋅
V M⋅:= a1 65.56
kPakg
=
Smith & Corripio, 3rd edition
Problem 2-23. Pressure in a compressed air tank when punctured.
Vp(t)
wi(t)wo(t)
po
Assumptions:Air obeys ideal gas law•Constant temperature•
Design conditions: kPa 1000Pa:=
pb 500 101.3+( )kPa:= M 29kg
kmole:=
Ao 0.785cm2:= T 70degC:= V 1.5m3
:=
Rg 8.314kPa m3
⋅
kmole K⋅⋅:= po 101.3kPa:= Use subscript "b" for base value for linearization.
Solution:
Mass balance on the tank: Vd ρ t( )⋅
dt⋅ wi t( ) wo t( )−=
Bernoulli's equation:

Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.
K 1.8R:=
If the compressor shuts down it will take approximately 5(42.8) = 214 sec (3.5 min) for the pressure transient to die out, according to the linear approximation. (See the results of the simulation, Problem 13-3, to see how long it actually takes.)
P s( )Wi s( )
Kτ s⋅ 1+
=Transfer function:
K 2.8 103×
kPa sec⋅
kg=τ 42.9 sec=
Ka1a2−
:=τ1a2−
:=Then
τd P t( )⋅
dt⋅ P t( )+ K Wi t( )⋅=Compare to standard form of first-order equation:
P 0( ) 0=1a2−
d P t( )⋅
dt⋅ P t( )+
a1a2−
Wi t( )=d P t( )⋅
dta1 Wi t( )⋅ a2 P t( )⋅+=Substitute:
a2 0.023− sec 1−=a2
Ao−
2 V⋅
2 Rg⋅ T 273 K⋅+( )⋅
M pb⋅ pb po−( )⋅
kPa1000Pa
⋅2 pb⋅ po−( )1000Pa
kPa⋅
m100cm
2:=
a2δ g⋅δ p⋅
b
⋅=Ao−
V
2 Rg⋅ T 273K+( )⋅
M⋅
12
pb pb p0−( )
1−
2⋅ 2pb po−( )=

Γ t( ) T t( ) Tb−=
Substitute: d Γ t( )⋅
dta1 Γs t( )⋅ a2 Γ t( )⋅+= Γ 0( ) 0= (base is initial steady state)
Standard form of the first-order differential equation: τd Γ t( )⋅
dt⋅ Γ t( )+ K Γs t( )⋅=
Divide by -a2 and rearrange: 1a2−
d Γ t( )⋅
dt⋅ Γ t( )+
a1a2−
Γs t( )=
M cv⋅
4 ε⋅ σ⋅ A⋅ Tb3
⋅
d Γ t( )⋅
dt⋅ Γ t( )+
TsbTb
3
Γs t( )=
Compare coefficients: τM cv⋅
4 ε⋅ σ⋅ A⋅ Tb3
⋅= K
TsbTb
3
=
Laplace transform: Γ s( )Γs s( )
Kτ s⋅ 1+
=
The input variable is the temperature of the oven wall. See problem 13-4 for the simulation.
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.
Smith & Corripio, 3rd edition
Problem 2-24. Temperature of a turkey in an oven.
T(t)Ts(t)
M
AssumptionsUniform turkey temperature•Negligible heat of cooking•Radiation heat transfer only•
Energy balance on the turkey:
M cv⋅d T t( )⋅
dt⋅ ε σ⋅ A⋅ Ts
4 t( ) T4 t( )−
⋅=
Use subscript "b" for linearization base values.
Solve for the derivative: d T t( )⋅
dtg Ts t( ) T t( ),( )= ε σ⋅ A⋅
M cv⋅Ts
4 t( ) T4 t( )−
=
Linearize: d T t( )⋅
dta1 Ts t( ) Tsb−( )⋅ a2 T t( ) Tb−( )⋅+=
where a1δ g⋅δTs b
⋅= 4 ε⋅ σ⋅ A⋅M cv⋅
Tsb3= a2
δ g⋅δT
b
⋅= 4− ε⋅ σ⋅ A⋅M cv⋅
Tb3=
Let Γs t( ) Ts t( ) Tsb−=

Q t( ) q t( ) qb−= a1δ g⋅δq
b
⋅= a2δ g⋅δT
b
⋅=
a11C
:= a24− α⋅ Tb
3⋅
C:= a1 5.556 10 3−
×R
BTU= a2 0.381− hr 1−
=
Substitute: d Γ t( )⋅
dta1 Q t( )⋅ a2 Γ t( )⋅+= Γ 0( ) 0= (base is initial value)
Standard form of first-order differential equation: τd Γ t( )⋅
dt⋅ Γ t( )+ K Q t( )⋅=
Divide by -a2 and rearrange: 1a2−
d Γ t( )⋅
dt⋅ Γ t( )+
a1a2−
Q t( )=
C
4 α⋅ Tb3
⋅
d Γ t( )⋅
dt⋅ Γ t( )+
1
4α Tb3
⋅Q t( )=
Compare coefficients: τC
4α Tb3
⋅:= K
1
4α Tb3
⋅:= τ 2.62 hr= K 0.01458
R hr⋅
BTU=
Smith & Corripio, 3rd edition
Problem 2-25. Slab heated by an electric heater by radiation.
T(t)
Ts
q(t)
Assumptions:Uniform temperature of the slab•Heat transfer by radiation only•
Energy balance on the slab:
M cv⋅d T t( )⋅
dt⋅ q t( ) ε σ⋅ A⋅ T4 t( ) Ts
4−
⋅−=
Let C M cv⋅= α ε σ⋅ A⋅=
Substitute Cd T t( )⋅
dt⋅ q t( ) α T4 t( ) Ts
4−
−=
Problem parameters: Use subscript "b" to denote linearization base value.
C 180BTU
R:= α 5 10 8−
⋅BTU
hr R4⋅
:= Ts 540R:= Tb 700R:=
Solve for the derivative: d T t( )⋅
dtg q t( ) T t( ),( )= 1
Cq t( )
α
CT4 t( ) Ts
4−
−=
Linearize: d T t( )⋅
dta1 q t( ) qb−( )⋅ a2 T t( ) Tb−( )⋅+=
Let Γ t( ) T t( ) Tb−=

Transfer function: Γ s( )Q s( )
Kτ s⋅ 1+
=
Excerpts from this work may be reproduced by instructors for distribution on a not-for-profit basis for testing or instructional purposes only to students enrolled in courses for which the textbook has been adopted. Any other reproduction or translation of this work beyond that permitted by Sections 107 or 108 of the 1976 United States Copyright Act without the permission of the copyright owner is unlawful.