Corrige TD1 126
3
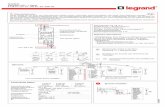
1 Contraintes et d´ eforma tions en pola ire 1 ) Cons id´ eron s le pro bl` eme pla n en co ordonn´ ees po lai res r, θ. Au point A le d´ epl acement vaut − → u A . A l’extr´emit´ e des deux segments perp endicul aires AB et AC les d´ eplacements valent respe ctivement − → u B et − → u C . Les longueurs des segments AB et BC sont respectivement : AB = dr AC = r dθ Fig. 1 – A gauche d´ eplacement radial et `a droite d´ epla ceme nt circ onf´ erent iel Pour un d´ epla cement radial seul : Les comp osantes des d´ eplacements se lon r et θ aux points A, B,C valent dans le rep` ere initia l r, θ du point A : Composantes selon r u A r = u r u B r = u r + ∂ur ∂r dr u C r = ( u r + ∂ur ∂θ dθ)cos dθ Composantes selon θ u A θ = 0 u B θ = 0 u C θ = ( u r + ∂u r ∂θ dθ)sin dθ De la d´ efiniti on du gra die nt d e d´ epl acement il en r´ esulte : ∂u r dr ∂u r rdθ ∂u θ dr ∂u θ rdθ = ε rr ∂u r rdθ ∂u θ dr ε θθ = u Br −u Ar AB u C r −u Ar AC u B θ −u A θ AB u C θ −u A θ AC = ∂ur ∂r 1 rdθ [(u r + ∂ur ∂θ dθ)cos dθ − u r ] 0 1 rdθ (u r + ∂u r ∂θ dθ)sin dθ ≈ ∂u r ∂r 1 r ∂u r ∂θ 0 u r r dans la limite des petites d´ eformations p our lesquelles o n ne conserve que les termes du premier ordre en dr et dθ avec cos dθ ≈ 1 et sin dθ ≈ dθ. Pour un d´ epl acement ci rconf ´ erentiel seul : Les comp osantes des d´ eplacements se lon r et θ aux points A, B,C valent dans le rep` ere initia l r, θ du point A : Composantes selon r u Ar = 0 u Br = 0 u C r = −(u θ + ∂u θ ∂θ dθ)sin dθ Composantes selon θ u A θ = u θ u B θ = u θ + ∂u θ ∂r dr u C θ = ( u θ + ∂u θ ∂θ dθ)cos dθ De la d´ efiniti on du gra die nt d e d´ epl acement il en r´ esulte : ∂ur dr ∂ur rdθ ∂u θ dr ∂u θ rdθ = u B r −u A r AB u C r −u A r AC u B θ −u A θ AB u C θ −u A θ AC = 0 − 1 rdθ (u θ + ∂u θ ∂θ dθ)sin dθ 1 dr [(u θ + ∂u θ ∂r dr) − u θ ] 1 rdθ [(u θ + ∂u θ ∂θ dθ)cos dθ − u θ ] ≈ 0 − u θ r ∂u θ ∂r 1 r ∂u θ dθ dans la limite des petites d´ eformations p our lesquelles o n ne conserve que les termes du premier ordre en dr et dθ avec cos dθ ≈ 1 et sin dθ ≈ dθ. Le t ense ur des d´ efo rmat ions ´ etant la par tie sym´ etri que du g radient de d´ epl ace ment, en a ddi tio nna nt composante pa r comp osante les deux r´ esultats ci-dessus on obtient finalement : ε(r, θ) = ε rr ε rθ ε rθ ε θθ = ∂ur ∂r 1 2 { 1 r ∂ur ∂θ + ∂u θ ∂r − u θ r } 1 2 { 1 r ∂u r ∂θ + ∂u θ ∂r − u θ r } 1 r ∂u θ ∂θ + u r r
-
Upload
papis-koby -
Category
Documents
-
view
225 -
download
0
Transcript of Corrige TD1 126
-
1
Contraintes et deformations en polaire
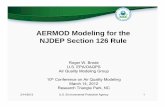
1) Considerons le probleme plan en coordonnees polaires r, . Au point A le deplacement vaut u A.A lextremite des deux segments perpendiculaires AB et AC les deplacements valent respectivementu B et u C . Les longueurs des segments AB et BC sont respectivement :
AB = dr AC = rd
Fig. 1 A gauche deplacement radial et a droite deplacement circonferentiel
Pour un deplacement radial seul :Les composantes des deplacements selon r et aux points A,B,C valent dans le repere initial r, dupoint A :
Composantes selon r uAr = ur uBr = ur +urr dr uCr = (ur +
ur d) cos d
Composantes selon uA = 0 uB = 0 uC = (ur +ur d) sin d
De la definition du gradient de deplacement il en resulte : urdr urrdudr
urd
= rr urrdu
dr
=uBruAr
ABuCruAr
ACuBuA
AB
uCuAAC
= urr 1rd [(ur + ur d) cos d ur]0 1rd (ur + ur d) sin d
urr 1r ur0 urr
dans la limite des petites deformations pour lesquelles on ne conserve que les termes du premier ordreen dr et d avec cos d 1 et sin d d.
Pour un deplacement circonferentiel seul :Les composantes des deplacements selon r et aux points A,B,C valent dans le repere initial r, dupoint A :
Composantes selon r uAr = 0 uBr = 0 uCr = (u + u d) sin dComposantes selon uA = u uB = u +
ur dr uC = (u +
u d) cos d
De la definition du gradient de deplacement il en resulte : urdr urrdudr
urd
=uBruAr
ABuCruAr
ACuBuA
AB
uCuAAC
= 0 1rd (u + u d) sin d1dr [(u +
ur dr) u]
1rd [(u +
u d) cos d u]
0 uru
r1rud
dans la limite des petites deformations pour lesquelles on ne conserve que les termes du premier ordreen dr et d avec cos d 1 et sin d d.
Le tenseur des deformations etant la partie symetrique du gradient de deplacement, en additionnantcomposante par composante les deux resultats ci-dessus on obtient finalement :
(r, ) =
rr rr =
urr 12{1r ur + ur ur }12{
1rur +
ur
ur }
1ru +
urr
-
2
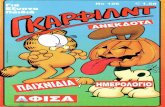
Lors dun deplacement radial seul, le terme = urr correspond a leffet geometrique propre a toutsysteme a symetrie de revolution qui impose une variation de perimetre associee a toute variation derayon. Lors dun accroissement ur du rayon r, le perimetre P = 2r saccrot de dP = 2ur et induitune deformation circonferentielle = dPP =
urr .
Lors dun deplacement circonferentiel seul, si le point A subit un deplacement tangentiel AA,la droite OAB devient en labsence de toute deformation la droite OAB et le glissement vrai dusegment AB doit se mesurer non pas a partir de AB mais a partir de AB deduit de AB par unerotation de corps rigide damplitude AA
OA =uAr . Le deplacement relatif du point B par rapport au
point A responsable du glissement du segment AB doit se mesurer a partir du point dintersection B
du vecteur uB avec la droite (en pointille) issue de lorigine et passant par lextremite A du vecteuruA. En effet, BB se decompose en BB = AA
OAOB = ur+drr rotation de corps rigide ninduisant pas
de deformation et du terme de glissement BB.
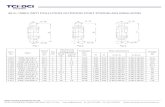
2) Equation de lequilibre.
Facette Force normale Force tangentielleFacette AD [rr]2rd [r]2rdFacette DC [ + d]dr [r +
r d]dr
Facette CB [rr + rrr dr]2(r + dr)d [r +rr dr]2(r + dr)d
Facette BA [ d]dr [r r d]dr
Projetons sur les axes r et en statique et en labsence de forces de volume :
Projection sur r [Fn(AD) + Fn(CB)] + [Ft(DC) + Ft(BA)] cos(d) + [Fn(DC) + Fn(BA)] sin(d) = 0Projection sur [Ft(AD) + Ft(CB)] + [Ft(DC) Ft(BA)] sin(d) + [Fn(DC) + Fn(BA)] cos(d) = 0
Comme, en se limitant aux termes du premier ordre en dr et d avec cos(d) 1 et sin(d) d :
Fn(CB) + Fn(AD) = [rr + rrr dr]2(r + dr)d [rr]2rd [rr + rrrr ]2drd
(Ft(DC) + Ft(BA)) cos(d) = {[r + r d]dr [r r d]dr} cos(d)
r 2drd
(Fn(DC) + Fn(BA)) sin(d) = {[ + d]dr [ d]dr} sin(d) 2drd
Ft(CB) + Ft(AD) = [r + rr dr]2(r + dr)d [r]2rd [r + rrr ]2drd
(Ft(DC) Ft(BA)) sin(d) = {[r + r d]dr + [r r d]dr} sin(d) r2drd
(Fn(DC) + Fn(BA)) cos(d) = {[ + d]dr [ d]dr} cos(d)
2drd
Il en resulte :Projection sur r rrr +
1rr +
rrr = 0
Projection sur rr +1r + 2
rr = 0
3) Lorsque la geometrie et le chargement presentent une symetrie cylindrique linvariance parrotation implique que les grandeurs physiques ne peuvent pas dependre de la variable . La seulecomposante de deplacement est la composante radiale ur. Pour la meme raison, il ne peut y avoir
-
3
de composante de deformation r mais la symetrie ninterdit pas lexistence dune composante non nulle ne dependant que de la variable r. Il en sera de meme pour les composantes du tenseurdes contraintes. Lapplication de ces regles de symetrie conduit, dans le cas dun materiau elastiquelineaire isotrope ij = kkij + 2ij aux simplifications suivantes :
=
rr rr =
urr 00 urr =
rr 00 =
(urr + urr ) + 2urr 00 (urr + urr ) + 2urr
Lequation de lequilibre est automatiquement satisfaite en projection sur laxe et sa projection surlaxe r se reduit a :
rrr
+rr
r= 0
rrr
= (+ 2)2urr2
+ 1r
(urr ur
r)
rr r
= 21r
(urr ur
r)
conduisant a lequation differentielle ordinaire :
d2u
dr2+
1r
du
dr ur2
= 0
dans laquelle u designe pour des raisons de simplification decriture, la composante radiale ur seulecomposante du champ de deplacement.Du fait de la symetrie radiale de la geometrie et du chargement on sattend a ce que le deplacement usoit proportionnel a r, le coefficient de proportionnalite pouvant lui meme etre une fonction de r doule changement de variable u = fr qui conduit a :
du
dr= f+r
df
dr
d2u
dr2= r
d2f
dr2+3
df
dr
f
f = 3
rLn(
f
C) = 3Lnr f = C
r3f =
D
r2+F u =
D
r+Fr
Il en resulte immediatement :
=
F Dr2 00 F + Dr2
= 2(+ )F 2Dr2 00 2(+ )F + 2D
r2
= B Ar2 00 B + A
r2
avec
{B = 2(+ )FA = 2D