Seminarski Rad- Racunalom Podrzane Konstrukcije - Remenski prijenos
UNIVERSIDADE FEDERAL DO CEARÁ
CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
CURSO DE ENGENHARIA ELÉTRICA
MÁRIO FRANCISCO APOLINÁRIO
CONVERSOR ESTÁTICO CC-CC NÃO ISOLADO BOOST BIDIRECIONAL APLICADO A UM VEÍCULO ELÉTRICO DE ESCALA REAL
FORTALEZA
2013

II
MÁRIO FRANCISCO APOLINÁRIO
CONVERSOR ESTÁTICO CC-CC NÃO ISOLADO BOOST BIDIRECIONAL APLICADO A UM VEÍCULO ELÉTRICO DE ESCALA REAL
Monografia apresentada ao Curso de Graduação em Engenharia Elétrica do Departamento de Engenharia Elétrica da Universidade Federal do Ceará, como parte dos requisitos para obtenção do título de Engenheiro Eletricista.
Área de Concentração: Eletrônica de Potência e Acionamentos de Máquinas.
Orientador: Prof. Dr.-Ing. Sérgio Daher.
FORTALEZA
2013

Dados Internacionais de Catalogação na Publicação
Universidade Federal do Ceará
Biblioteca de Ciências e Tecnologia
A654c Apolinário, Mário Francisco.
Conversor estático CC-CC não isolado BOOST bidirecional aplicado a um veículo elétrico de
escala real / Mário Francisco Apolinário. – 2013.
118 f. : il., color., enc. ; 30 cm.
Monografia (graduação) – Universidade Federal do Ceará, Centro de Tecnologia, Departamento de
Engenharia Elétrica, Curso de Engenharia Elétrica, Fortaleza, 2013.
Orientação: Prof. Dr. Sérgio Daher.
1. Eletrônica de potência. 2. Conversores de corrente elétrica. 3. Controle eletrônico. I. Título.
CDD 621.3

V
A Deus,
A mãe natureza,
Aos meus pais: Márcia e Francisco,
E as pessoas a quem tanto respeito.
VI
AGRADECIMENTOS
Agradeço à Universidade Federal do Ceará pela oportunidade de realizar este
estudo e pela oportunidade de ingresso em uma instituição pública de ensino superior.
Ao professor Dr.-Ing. Sérgio Daher por sua amizade e por sua orientação, tantas
vezes oportuna e precisa.
Ao professor Dr. René Pastor Torrico Bascopé por sua amizade e pelo
conhecimento repassado.
Aos amigos professores do curso de Engenharia Elétrica pelo apoio e incentivo.
A todos os meus familiares, pelo apoio e incentivo nas horas difíceis desta jornada.
Aos meus pais, Márcia Maria de Sousa Apolinário e Francisco José Apolinário
que valorizam a educação, como meio de formar um cidadão, e pelo constante apoio no
desenvolver e incentivo a minha formação.
Aos meus amigos e colegas que nunca perderam a confiança na realização deste
trabalho, e pelo incentivo e encorajamento nos momentos de dificuldade.
VII
RESUMO
Este Trabalho consiste no projeto de um módulo de potência, envolvendo o uso de uma
topologia de conversor estático CC-CC básico não isolado BOOST bidirecional operando em
modo de condução contínuo, a ser integrado a um protótipo de Veículo Elétrico. O conversor
foi especificado para processar uma potência de 10000 [W] juntamente com uma tensão de
entrada de 144 [V] e de saída de 311 [V] quando operando em modo BOOST. A técnica
“controle por modo corrente média” foi utilizada, obedecendo às seguintes etapas: primeiro, a
partir do modelo da “Chave PWM”, as funções de transferência que descrevem a dinâmica
das grandezas elétricas do circuito são obtidas e validas experimentalmente; segundo, um
procedimento de projeto referente ao compensador contínuo é apresentado em função das
considerações de desempenho; terceiro, o projeto do compensador discreto é realizado de
forma a replicar a mesma dinâmica do compensador contínuo; quarto, a simulação de ambos
os circuitos frente ao degrau de carga demonstrou praticamente o mesmo comportamento
dinâmico. Quanto aos resultados obtidos, verificou-se que o módulo de potência desenvolvido
pode validar a fundamentação teórica descrita no trabalho, antes mesmo que o teste
embarcado no veículo fosse realizado. Por fim, conclui-se que a metodologia proposta é de
fácil compreensão e este trabalho reúne uma coletânea de referências que contribuem ao
assunto eletrificação no setor de transportes.
Palavras-Chave: Veículo Elétrico. Conversor BOOST Bidirecional. Controle Discreto.

VIII
ABSTRACT
This search consists of the design of a power module, involving the use of a static converter
topology basic non-isolated DC-DC BOOST bidirectional operating in continuous conduction
mode, to be integrated into a prototype electric vehicle. The converter is specified for
processing an output power of 10000 [W] with an input voltage of 144 [V] and an output
voltage of 311 [V] when operating in BOOST mode. The technique "average current mode
control" was used, using the following steps: first, from the model of "PWM Switch", the
transfer functions which describe the dynamics behavior of the electrical circuit are obtained
experimentally and validated; second, the project procedure of a continuous compensator is
developed taking into account a set of performance criteria; third, the project of the discrete
compensator is realized in order to replicate the same dynamics of continuous compensator;
fourth, the simulation of both circuits under a load step showed practically the same dynamic
behavior. From the experimental results, it was verified that the developed power module is in
accordance with the theoretical analyses described in this work, even before the test was
conducted on board in the vehicle. Finally, it can be concluded that the proposed methodology
is easy to understand and this work brings together a collection of references which can
contribute to future studies related to electrification of transportation.
Key-Words: Electric Vehicle. BOOST Converter Bidirectional. Discrete control.
IX
LISTA DE ABREVIATURAS E SIGLAS
A/D Analógico para Digital BEV Veículo Elétrico a Bateria (Battery Electric Vehicles) CC-CC Conversão corrente contínua para corrente contínua CC-CA Conversão corrente contínua para corrente alternada CO2 Dióxido de Carbono
CE Caixa de Embreagem CP Conversor de Potência CR Caixa de Redução CV Cavalo Vapor D/A Digital para Analógico DF Diferencial Fixo DOE Grau de Eletrificação (Degree of Electrification) EUA Estados Unidos da América EV Veículo Elétrico (Electric Vehicle) FT Função de transferência (Transfer Function) GHG Anthropogenic Greenhouse Gas
HEV Veículo Elétrico Híbrido (Hybrid Electric Vehicle) ICE Motor de Combustão Interna (Internal Combustion Engine) IGBT Insulated Gate Bipolar Transistor
IPCC International on Climate Change MCC Modo de Condução Contínuo MCD Modo de Condução Descontínuo ME Motor Elétrico MIT Motor de Indução Trifásico PG Motor de Partida e Gerador PHEV Veículo Elétrico com Plug (Plug-in Hybrid Electric Vehicle) PPM Parte por Milhão PWM Pulse Width Modulation RF Reparo de Freio SAE Sistema de Armazenamento de Energia Elétrica UEV Urban Electric Vehicles
UFC Universidade Federal do Ceará TFC Trabalho Final de Curso ZOH Zero-Order Hold
X
LISTA DE SÍMBOLOS
α Ângulo gradiente rad δ Fator de massa - η Rendimento do conversor - ηt Eficiência da transmissão -
y Ângulo de condução rad µ Coeficiente de adesão entre pneu-superfície -
ρ Densidade do ar kg/m3
∆ILe Ondulação de corrente no indutor de entrada A ∆Vo Ondulação de tensão na saída V
a Aceleração do sistema translacional m/s2
a Terminal ativo - Af Área frontal do veículo m2
c Terminal comum - car Coeficiente de resistência aerodinâmica - Ch Chave ativa (IGBT) - Ce Capacitância do capacitor de entrada F Co Capacitância do capacitor de saída F d Fator de performance - D Razão cíclica -
D1 Razão do tempo de condução do diodo num período de chaveamento - Dc Chave passiva (Diodo) - Dcr Razão cíclica crítica - fro Coeficiente de resistência à rolagem - Fa Força de resistência aerodinâmica N Fg Força de resistência ao gradiente N F Força N Ft Esforço de tração N Fr Força de resistência à rolagem N Fre Força resistente N
Fmax.t Esforço de tração máximo N fc Frequência de chaveamento Hz fcr Frequência de cruzamento do compensador Hz fcri Frequência de cruzamento do compensador de corrente Hz fcrv Frequência de cruzamento do compensador de tensão Hz fp Frequência do pólo Hz
fpb Filtro passa baixa de 1ª ordem - fz Frequência do zero Hz g Aceleração da gravidade m/s2
ha Altura de aplicação força de resistência aerodinâmica m ho Altura do centro de massa do veículo m Hi Ganho do sensor de corrente - Hv Ganho do sensor de tensão - io Relação de redução do diferencial - it Relação de redução da caixa de redução - Ia Corrente média no terminal ativo A
Icon Corrente no coletor chave ativa em condução A
XI
Ictl Corrente de calda no coletor A Ic Corrente média no terminal comum A
ICh Corrente na chave ativa A IChef Corrente eficaz na chave ativa A
IChmed Corrente média na chave ativa A ICo Corrente no capacitor de saída A
ICoef Corrente eficaz no capacitor de saída A Idon Corrente no diodo em condução A IDc Corrente na chave passiva A
IDcef Corrente eficaz na chave passiva A IDcmed Corrente média na chave passiva A
Ie Corrente de entrada A ILe Corrente no indutor de entrada A
ILeef Corrente eficaz no indutor de entrada A ILemax Corrente máxima no indutor de entrada A ILemin Corrente mínima no indutor de entrada A
Io Corrente de saída A Ionor Corrente de saída normalizada - Ip Corrente média no terminal passivo A
IRo Corrente na carga A Irr Corrente de recuperação reversa A jp Momento de inércia das rodas - je Momento de inércia associado aos elementos da planta de potência -
Ka Parâmetro de condução do conversor - Ka_cr Parâmetro de condução crítico -
Kc Ganho do compensador Le Distância entre eixos m Ld Distância do eixo dianteiro ao centro de massa do veículo m Lt Distância do eixo traseiro ao centro de massa do veículo m Le Indutância do indutor de entrada H M Ganho estático - Mc Ganho estático em modo contínuo - Mcr Ganho estático crítico - Md Ganho estático do modo descontínuo - MFi Margem de fase do compensador de corrente grau MFv Margem de fase do compensador de tensão grau MV Massa do veículo kg O Centro geométrico - n Relação de transformação - N Força de reação normal N Nc Número de células - Np Velocidade de rotação da planta de potência RPM p Número de degraus em um quarto de ciclo - p Terminal passivo -
Pm Potência do motor na ponta do eixo CV Ptdca Potência total dissipada na chave ativa W Ptdcp Potência total dissipada na chave passiva W Pdoff Potência dissipada no instante da entrada em bloqueio W Pdon Potência dissipada no instante da entrada em condução W Pdsat Potência dissipada no instante da condução W
XII
Pdc Potência dissipada no capacitor de saída W Po Potência de saída do conversor W re Raio efetivo do pneu m re Resistência equivalente da topologia Ω Rb Resistência da bateria Ω Re Resistência da fonte Ω
Rem Resistência de enrolamento do motor Ω RCe Resistência série do capacitor de entrada Ω RCo Resistência série do capacitor (de saída) Ω RL Resistência do indutor de entrada Ω Ro Resistência de carga Ω
Ronor Resistência de carga normalizada - s Variável de Laplace - Sa Distância percorrida m Sc Sinal periódico de controle 0/1 V Velocidade m/s
Vap Tensão entre os terminais a e c V Vcp Tensão entre os terminais c e p V Vb Tensão na bateria V
Vcesat Tensão entre coletor e emissor chave ativa em condução V Vceoff Tensão entre coletor e emissor chave ativa em bloqueio V VCh Tensão na chave ativa V
VChmax Tensão máxima na chave ativa V Vdsat Tensão no diodo em condução V Vdoff Tensão no diodo em bloqueio V Vd Variável de tensão do modelo AC V
VDc Tensão na chave passiva V VDcrev Tensão reversa na chave passiva V
Ve Tensão na entrada V VLe Tensão no indutor de entrada V Vo Tensão na saída (do conversor) V
Vodes Tensão de descarga V Vp Tensão no primário V
Vref Tensão de referência V Vri Tensão de referência para malha de corrente V Vrv Tensão de referência para malha de tensão V Vs Tensão no secundário V Vt Amplitude do dente de serra V Vc Velocidade de cruzeiro m/s t Tempo s ta Tempo de aceleração s T Torque N.m Ta Intervalo de amostragem s Tai Intervalo de amostragem para o sensor de corrente s Tav Intervalo de amostragem para o sensor de tensão s Tc Período de chaveamento s
Thp Tempo de hold-up Time s tif Tempo de descida da corrente s tir Tempo de subida da corrente s trr Tempo de recuperação reversa s
XIII
tvf Tempo de descida da tensão s tvr Tempo de subida da tensão s Tn Torque nominal kgf.m
Tmax Torque máximo kgf.m Tp Torque exigido à planta de potência N.m Tr Torque de rolagem N.m v1 Velocidade inicial m/s v2 Velocidade final m/s z Variável de representação discreto - z Distância da força de reação ao centro do pneu m
XIV
SUMÁRIO
1 INTRODUÇÃO ................................................................................................... 1
1.1 Apresentação do tema e do problema ................................................................ 1
1.2 Objetivo geral e objetivos específicos ................................................................. 3
1.3 Justificativa .......................................................................................................... 3
1.4 Metodologia da pesquisa ..................................................................................... 4
1.5 Delimitação do trabalho ...................................................................................... 4
1.6 Organização do trabalho ..................................................................................... 5
2 VEÍCULOS ELÉTRICOS E ATUALIDADE .................................................. 7
2.1 Introdução ............................................................................................................ 7
2.2 Eletrificação no setor de transportes ................................................................. 8
2.3 Tecnologia de veículos elétricos .......................................................................... 10
2.4 Infraestrutura ...................................................................................................... 15
2.5 Legislação e política de investimento ................................................................. 17
2.6 Critérios de escolha entre tecnologias de bateria ............................................. 20
3 FUNDAMENTOS DE UM VEÍCULO ELÉTRICO ........................................ 22
3.1 Introdução ............................................................................................................ 22
3.2 Fundamentos de um veículo ............................................................................... 23
3.2.1 Forças resistentes .................................................................................................. 24
3.2.2 Máximo esforço de tração .................................................................................... 27
3.2.3 Requisitos de performance ................................................................................... 28
3.2.4 Exemplo de projeto ............................................................................................... 32
3.3 Especificações técnicas do conversor CC-CA ................................................... 36
4 ANÁLISES QUALITATIVA E QUANTITATIVA, E EXEMPLO DE
PROJETO DA TOPOLOGIA BOOST BIDIRECIONAL ..............................
38
4.1 Introdução ............................................................................................................ 38
4.2 Análise qualitativa ............................................................................................... 39
4.3 Análise quantitativa ............................................................................................. 42
4.3.1 Equações preliminares ......................................................................................... 42
4.3.2 Características de saída ........................................................................................ 43
4.3.3 Dimensionamento e especificação dos elementos ativos e passivos do circuito . 49
4.3.3.1 Indutor de entrada ................................................................................................. 49
XV 4.3.3.2 Chave ativa ............................................................................................................ 50
4.3.3.3 Chave passiva ........................................................................................................ 50
4.3.3.4 Capacitor de saída ................................................................................................. 51
4.4 Exemplo de projeto .............................................................................................. 51
5 MODELAGEM E CONTROLE DA TOPOLOGIA BOOST
BIDIRECIONAL .................................................................................................
59
5.1 Introdução ............................................................................................................ 59
5.2 Linearização e validação do modelo .................................................................. 61
5.2.1 Obtenção das plantas ............................................................................................ 62
5.2.2 Validação das plantas ........................................................................................... 64
5.3 Implementação da técnica de controle ............................................................... 66
5.3.1 Procedimento de projeto do compensador contínuo ........................................... 68
5.3.2 Procedimento de projeto do compensador discreto ............................................. 72
5.4 Resultados obtidos em simulação ....................................................................... 77
5.4.1 Ensaio em malha aberta ....................................................................................... 78
5.4.2 Ensaio em malha fechada .................................................................................... 80
6 RESULTADOS EXPERIMENTAIS ................................................................. 84
6.1 Introdução ........................................................................................................... 84
6.2 Resultados experimentais obtidos com o protótipo .......................................... 85
CONSIDERAÇÕES FINAIS .............................................................................. 89
REFERÊNCIAS ................................................................................................... 91
APÊNDICE A – PROJETO FÍSICO DO INDUTOR ...................................... 96
APÊNDICE B – PROJETO DO SNUBBER ..................................................... 99
APÊNDICE C – CÓDIGO SIMPLIFIED C BLOCK ....................................... 100
APÊNDICE D – ESQUEMÁTICO CIRCUITO DE POTÊNCIA .................. 102
ANEXO A – PERDAS NO NÚCLEO VERSUS DENSIDADE DE FLUXO 103
1 CAPÍTULO 1 – INTRODUÇÃO
Neste primeiro capítulo, uma introdução a este trabalho é apresentada. São
tratados em sequência: apresentação do tema e do problema, objetivo geral e objetivos
específicos, justificativa, metodologia da pesquisa, delimitação do trabalho e organização do
trabalho.
1.1 Apresentação do tema e do problema
Este Trabalho Final de Curso (TFC) consiste no projeto de um módulo de
potência, envolvendo o uso de uma topologia de conversor estático CC-CC básico não isolado,
a ser integrado ao Veículo Elétrico (EV) em estudo. O projeto do EV foi iniciado na
Universidade Federal do Ceará (UFC) em março de 2009 e até o presente instante encontra-se
em fase de constante evolução (DAHER et al., 2009).
Como forma de enriquecer o aprendizado e consolidar na prática a teoria assistida,
um desafio aos alunos do curso de engenharia elétrica da UFC, no contexto da disciplina de
Acionamentos de Máquinas Elétricas, foi proposto: projetar um EV com conhecimento e
pessoal local. Aceito o desafio, um grande estimulo e empenho por parte da equipe foi
alcançado, sendo assim nasce o protótipo de EV batizado de “Patativa” (FEITOSA, 2003).
Atualmente, o “Patativa” encontra-se operante; a partir de um veículo comercial
(Gurgel X12, 1998), uma total remodelagem do sistema mecânico foi necessária, de modo a
permitir a instalação de um Motor de Indução Trifásico (MIT) e seu acoplamento satisfatório
à caixa de redução ali presente. Algumas especificações técnicas do protótipo são citadas:
veículo puramente elétrico, MIT de 15 [CV], conversor CC-CA (conversor multinível
trifásico com modulação em baixa frequência com 5 células por fase) e banco de baterias com
36 células VRLA 12 [V] e 12 [A.h] (três grupos paralelo com 12 células em série), entre
outros.
Alguns problemas, que são provenientes do modo como foi estabelecida a
conexão do banco de baterias com o conversor CC-CA, são mencionados: o valor de pico da
tensão senoidal aplicada ao MIT é limitado à tensão de alimentação (obtida na saída do
conversor), a tensão aplicada aos enrolamentos da máquina de indução é inferior ao valor da
tensão nominal (para o fechamento em delta) e elevado tempo de resposta aos transitórios
2 dinâmico-elétricos por parte das baterias, tanto para o caso de aceleração como para a
frenagem regenerativa, entre outros.
Em vista aos acontecimentos mencionados, este trabalho descreve uma
metodologia de projeto necessária ao desenvolvimento do módulo de potência a ser integrado
ao EV; o uso de um conversor estático CC-CC básico não isolado é bastante atrativo quando
uma potência elevada é especificada, de modo que as perdas possam ser investigadas e
otimizadas em um conversor CC-CC com um reduzido número de componentes.
Dentre as topologias clássicas de conversor estático CC-CC básico não isolado,
uma aplicação envolvendo a topologia BOOST é tratada, em vista a uma variedade de
características inerentes: valor médio da tensão de saída superior ao valor médio da tensão de
entrada, relação não linear entre as tensões de entrada e de saída em uma ampla faixa de
operação e reduzido número de componentes, entre outros (KAZIMIERCZUK, 2008).
Alguns benefícios provenientes do uso da topologia BOOST bidirecional são
citados e comentados a seguir de forma parcial: a tensão aplicada aos enrolamentos da
máquina é a nominal, verifica-se que a tensão média na saída do conversor CC-CC, ajustada
em função da razão cíclica (D), é superior a tensão de pico na saída do conversor CC-CA
(BARBI; MARTINS, 2008; RASHID, 1996); equalização da tensão nas baterias, a fim de que
seja mantida uma tensão constante no barramento de baterias evita-se assim uma redução do
ciclo de vida destas (KUTKUT et al., 1999); e dualidade entre as topologias BUCK e BOOST,
esta dualidade permite que o fluxo de potência seja invertido durante a frenagem do veículo
(ERICKSON; MAKSIMOVIC, 2003; YOONG et al., 2010).
Uma justificativa a respeito da escolha do tema é apresentada; devido à
necessidade em promover uma tensão adequada à operação do MIT (nominal) e as possíveis
melhorias no desempenho desta em um sistema real embarcado, este trabalho propõe como
solução uma aplicação à topologia de conversor estático CC-CC básico não isolado, de modo
a englobar uma fundamentação teórica inerente e o desenvolvimento de um protótipo. Sendo
assim, o título final deste trabalho pode ser definido como: Conversor estático CC-CC não
isolado BOOST bidirecional aplicado a um veículo elétrico de escala real.
Baseado no exposto apresentado nesta seção, o problema a ser investigado neste
trabalho consiste no projeto e na experimentação em laboratório de um módulo de potência, o
qual está baseado em uma aplicação à topologia de conversor estático CC-CC básico não
isolado e utilizado na descrição de um conversor BOOST bidirecional, e sua integração a um
veículo elétrico em escala real.
3 1.2 Objetivo geral e objetivos específicos
Esta seção estabelece uma sequência lógica progressiva no inter-relacionamento
do conteúdo exposto neste trabalho, de modo a apresentar os objetivos específicos em
conformidade ao cumprimento do objetivo geral do trabalho.
O objetivo geral é descrito a seguir:
• Desenvolver um módulo de potência em escala real (protótipo) fazendo uso do
conversor estático CC-CC não isolado BOOST bidirecional.
Os objetivos específicos são listados a seguir:
• Apresentar uma discussão referente aos principais assuntos envolvendo a
eletrificação no setor de transportes;
• Propor uma fundamentação teórica inerente aos elementos (elétrico e mecânico)
que compõem o sistema de acionamento do veículo;
• Descrever um estudo qualitativo e um estudo quantitativo em respeito à
topologia de conversor CC-CC adotada;
• Fornecer as especificações e as considerações do projeto necessárias ao
desenvolvimento do exemplo de projeto;
• Analisar os esforços e as perdas nos diferentes elementos de circuito do
conversor CC-CC BOOST bidirecional;
• Fazer uso de um modelo equivalente de pequenos sinais necessário a
linearização das variáveis não lineares em conversores de potência;
• Projetar os circuitos de compensação (contínuo e discreto); e
• Validar os resultados teóricos fazendo uso de simulação e experimentação.
1.3 Justificativa
A partir da necessidade em solucionar um problema real, este trabalho reúne uma
coletânea de informação e vivências que muito tem a enriquecer a bagagem de conhecimento
teórico e prático do profissional ligado à área, cujo ramo de pesquisa visa ao desenvolvimento
de novos produtos e à solução de problemas do cotidiano.
Atualmente, com a crescente onda de problemas no setor de transporte urbano
(movido a combustível fóssil) nas grandes metrópoles, o uso de veículos parcialmente ou
totalmente elétricos esta modificando a filosofia de locomoção do homem contemporâneo
4 (SIMPÓSIO… MASSACHUSETTS: MITEI, 2010). Diferentes modelos de veículos
elétricos das grandes montadoras estão sendo lançados no setor automobilístico; diferentes
linhas de pesquisa espalhadas por universidades e centros de pesquisa buscam desenvolver e
melhorar a tecnologia aplicada aos veículos elétricos.
Fazendo uma análise do ponto de vista acadêmico, este trabalho busca
documentar o problema investigado, bem como fornecer uma fonte de consulta e uma
coletânea de informações relacionadas a outras literaturas envolvidas.
Fazendo uma análise do ponto de vista pessoal, o desenvolvimento desta pesquisa
está baseado na área de atuação pessoal do autor, bem como na vastidão de diferentes áreas de
pesquisa à que este trabalho possa ser útil: processamento de energia, qualidade de energia e
fontes de energia renováveis.
1.4 Metodologia da pesquisa
Durante o desenvolvimento da pesquisa, um embasamento teórico é seguido por
um desenvolvimento prático; fazendo uso de simulação em computador, a fundamentação
matemática pode ser revisada antes da verificação experimental prática, evitando assim erros
“sistemáticos”.
1.5 Delimitação do trabalho
O perfil desta pesquisa é fundamentado em atividades de natureza teórica e prática;
nota-se que devido à vastidão de material publicado, os quais são direcionados às áreas de
eletrônica de potência, de acionamentos de máquinas elétricas e de controle, estabelecer uma
limitação do conteúdo apresentado é uma prioridade neste trabalho.
Inicialmente, um modelo simplificado do sistema de acionamento do veículo é
apresentado; neste modelo, são referenciados: o banco de baterias, o conversor CC-CC, o
conversor CC-CA, a máquina elétrica e o sistema mecânico de acionamento. Em
conformidade ao modelo, um embasamento teórico parcial é desenvolvido atentando aos
seguintes tópicos: dinâmica do veículo, fazendo uso das equações clássicas da mecânica
desenvolve-se um modelo dinâmico do veículo; e em especificações técnicas do conversor
CC-CA, as especificações reais deste são verificadas.
5
A modelagem da topologia de conversor estático CC-CC não isolado BOOST
bidirecional é limitada ao modo BOOST operando em Modo de Condução Contínuo (MCC);
a modelagem contempla a análise qualitativa, a análise quantitativa e o exemplo de projeto.
Analise dos esforços e das perdas em uma topologia com um reduzido número de
componentes também são abordados, evidenciando assim um procedimento para a
especificação dos componentes comerciais utilizados na montagem do protótipo.
Diversas técnicas capazes de linearizar circuitos conversores CC-CC estão
disponíveis na literatura, as quais linearizam o comportamento das variáveis não lineares do
modelo dentro de um intervalo de operação. Este trabalho adota o modelo da “Chave PWM”
em MCC, fato que se deve à sua simplicidade razoável e aos resultados que se aproximam
satisfatoriamente do modelo real (VORPÉRIAN, 1990).
O controlador digital contempla as seguintes atividades: aquisição de sinais
(tensão e corrente), processamento de dados, controle de I/O (In/Out), interface homem
máquina e a descrição da técnica “controle por modo corrente média” em sua versão discreta.
Logo, o uso do dsPIC30F4011 é uma solução de fácil adaptação prática e suficiente à
aplicação a qual se destina.
1.6 Organização do trabalho
Uma breve descrição da organização dos capítulos, que compõem este trabalho, é
tratada, obedecendo assim uma sequência sistemática. No capítulo 1, uma caracterização do
trabalho é apresentada, de modo a fornecer uma fundamentação aos demais capítulos; as
seguintes seções compõem este capítulo: apresentação do tema e do problema, o objetivo
geral e objetivos específicos, justificativa e metodologia da pesquisa. No capítulo 2, uma
discussão envolvendo a “eletrificação no setor de transportes” é revisada, bem como
diferentes literaturas são referenciadas; as seguintes seções compõem este capítulo:
eletrificação no setor de transportes, tecnologia de veículos elétricos e infraestrutura. No
capítulo 3, os “fundamentos de veículo elétrico” são tratados, ressaltando assim os principais
elementos integrantes e análise teórica inerente; as seguintes seções compõem este capítulo:
fundamentos de um veículo e especificações técnicas do conversor CC-CA. No capítulo 4, a
análise qualitativa, a análise quantitativa e exemplo de projeto são verificados, observa-se um
estudo detalhado dedicado a topologia escolhida que repercute na escolha de todos os
componentes do circuito de potência em função das especificações e considerações de projeto
6 fornecidas, bem como análise de esforços e de perdas; as seguintes seções compõem este
capítulo: análise qualitativa, análise quantitativa e exemplo de projeto. No capítulo 5, a
modelagem e o controle da topologia são apresentados; verifica-se uma aplicação ao modelo
da “chave PWM”, de modo a obter o modelo do comportamento dinâmico de uma grandeza
do conversor (corrente no indutor); em seguida fazendo uso deste modelo, projeta-se o
compensador necessário ao controle das grandezas em estudo; as seguintes seções compõem
este capítulo: linearização e validação do modelo, implementação da técnica de controle e
resultados simulados. No capítulo 6, os resultados experimentais são obtidos com a montagem
do protótipo, as seguintes seções compõem este capítulo: introdução e resultados
experimentais obtidos com o protótipo. No capítulo 7, a conclusão obtida com o
desenvolvimento deste trabalho é apresentada, juntamente com uma listagem de possíveis
trabalhos futuros.
7 CAPÍTULO 2 - VEÍCULOS ELÉTRICOS E ATUALIDADE
Neste segundo capítulo, uma revisão ao tema “veículos elétricos e atualidade” é
apresentada. São tratados em sequência: introdução, eletrificação no setor de transportes,
tecnologia de veículos elétricos, infraestrutura, legislação e políticas de investimento, e
critério de escolha entre tecnologias de bateria.
2.1 Introdução
Grandes transformações no setor de transportes urbano são observadas no
momento atual. A eletrificação no setor de transportes nas grandes metrópoles é sustentada
por um conjunto de princípios e estratégias político-econômicas em benefício à emissão nula
ou reduzida de gases de escape, menor custo por quilômetro em comparação aos veículos
convencionais e a redução da dependência por combustíveis fósseis.
Com efeito, o tema proposto no título deste capítulo tem por objetivo apresentar
uma coletânea de informações e idéias relacionadas bastante difundidas no campo acadêmico,
as quais contribuem a uma maciça produção literária em diferentes áreas do conhecimento e a
formação de um pensamento crítico diversificado.
Fazendo uso das informações apresentadas no simpósio (SIMPÓSIO…
MASSACHUSETTS: MITEI, 2010), torna-se de grande importância explorar o conteúdo
apresentado durante o evento, o qual fora dividido em quatro painéis chaves: o por quê do
assunto eletrificação, tecnologia de veículos, infraestrutura e políticas de investimento; sendo
assim, o conteúdo contido nos painéis são discutidos no decorrer do capítulo.
Verifica-se que ao longo deste capítulo uma limitação do conteúdo é necessária,
diferentes fontes bibliográficas são referenciadas e diversos subtemas relacionados são
desenvolvidos. Sendo assim, as informações e as idéias, que na maior parte das vezes
repercutem em diferentes pontos de vista conflitantes, são apresentadas ao longo das
subseções de forma parcial sem que seja manifestado o ponto de vista do autor.
Baseado no exposto introdutório, o problema a ser tratado neste capítulo consiste
em apresentar uma discussão referente aos principais assuntos envolvendo a eletrificação no
setor de transportes, bem como apresentar diferentes fontes de consulta relacionadas em
conformidade aos objetivos específicos do trabalho.
8 2.2 Eletrificação no setor de transportes
A questão da eletrificação no setor de transporte nas grandes metrópoles
representa uma fração significativa na redução da emissão de gases de efeito estufa. A
presença crescente de veículos com Motor de Combustão Interna (ICE) no setor de transporte
em economias emergentes promove a emissão de dióxido de carbono (CO2) em ritmo
acelerado. Observa-se que a eletrificação do setor irá reduzir à dependência por combustíveis
fósseis, promovendo assim benefícios às políticas estrangeiras, à redução e a não volatilidade
do preço do combustível (SIMPÓSIO… MASSACHUSETTS: MITEI, 2010).
Do ponto de vista dos mercados consumidores, observa-se um aumento na
demanda mundial por combustíveis fósseis em uma perspectiva até 2030, principalmente em
nações com Índia e China que possuem uma expectativa de crescimento acelerado. Verifica-
se que as maiores reservas mundiais destes combustíveis localizam-se no Oriente Médio; no
entanto, devido à limitação de políticas e de estratégias internacionais tem resultado em um
subinvestimento em práticas de exploração e em tecnologias que maximizem a exploração
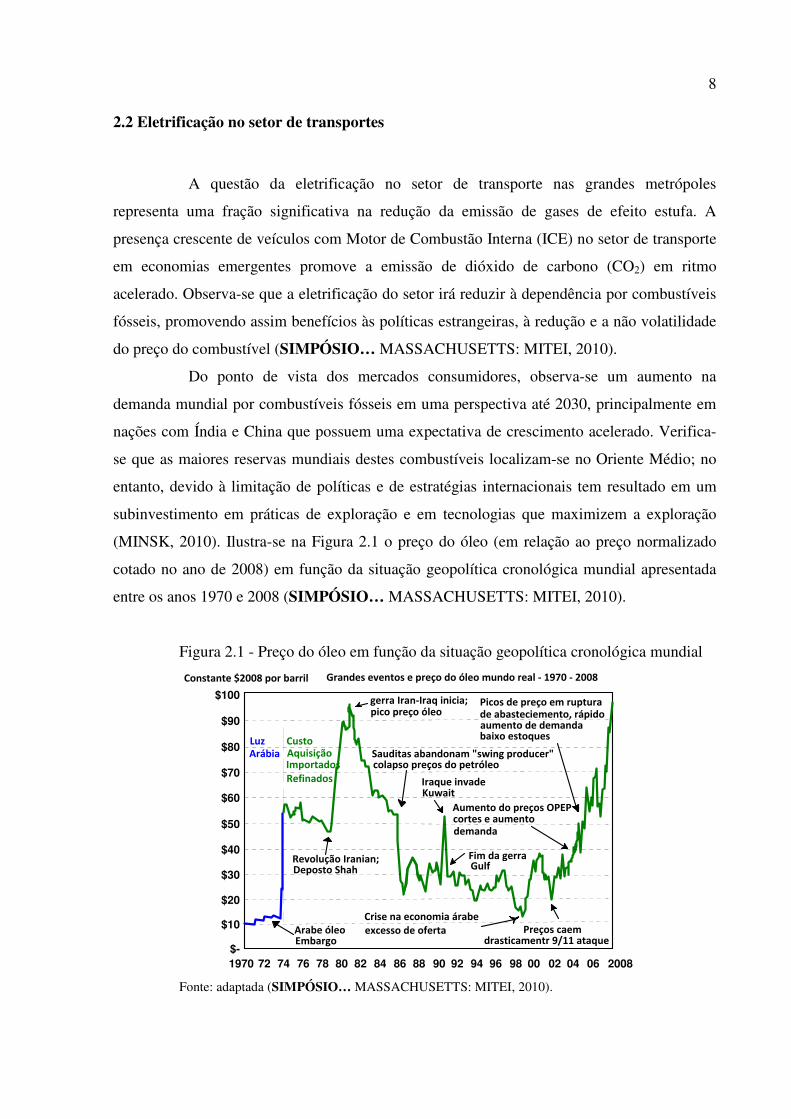
(MINSK, 2010). Ilustra-se na Figura 2.1 o preço do óleo (em relação ao preço normalizado
cotado no ano de 2008) em função da situação geopolítica cronológica mundial apresentada
entre os anos 1970 e 2008 (SIMPÓSIO… MASSACHUSETTS: MITEI, 2010).
Figura 2.1 - Preço do óleo em função da situação geopolítica cronológica mundial
LuzArábia
CustoAquisiçãoImportados
Refinados
$100
$90
$80
$70
$60
$50
$40
$30
$20
$10
$-
1970 72 74 76 78 80 82 84 86 88 90 92 94 96 98 00 02 04 06 2008
Arabe óleoEmbargo
Revolução Iranian;Deposto Shah
gerra Iran-Iraq inicia;pico preço óleo
Sauditas abandonam "swing producer"colapso preços do petróleo
Iraque invadeKuwait
Fim da gerraGulf
Picos de preço em rupturade abasteciemento, rápidoaumento de demandabaixo estoques
Aumento do preços OPEPcortes e aumento demanda
Crise na economia árabe
excesso de oferta Preços caemdrasticamentr 9/11 ataque
Constante $2008 por barril Grandes eventos e preço do óleo mundo real - 1970 - 2008
Fonte: adaptada (SIMPÓSIO… MASSACHUSETTS: MITEI, 2010).
9
Países completamente dependentes de combustíveis fósseis (como exemplo EUA,
que engloba “23% da demanda mundial de óleo combustível”) têm sua economia facilmente
abalada devido à volatilidade de preços, à transferência de riquezas e a estrutura de mercado
organizado em oligopólio (MINSK, 2010).
Especula-se que no ano de 2030, ocorrerá um aumento de 50% na demanda de
energia mundial, em vista ao uso contínuo de combustíveis fósseis, repercutindo assim em um
aumento esperado de 37% na emissão de CO2. Segundo International on Climate Change
(IPCC), “para um incremento de 550 PPM (Parte por Milhão) de CO2 na atmosfera resultará
em uma elevação de 3º Celsius na temperatura média global”, alguns impactos ambientais são
apresentados: aumento no nível do mar, extinção em potencial de algumas espécies de
animais e vegetais, perda de ecossistemas, secas, queimadas e redução da atividade agrícola,
entre outros (SCHÄFER et al., 2009; OECD MULTILINGUAL SUMMARIES, 2012).
Em países como EUA, a dependência por combustíveis fósseis é uma realidade;
com a eletrificação do setor de transportes uma variedade de benefícios é obtida, dentre estes
são citados: a diversidade no uso de novos combustíveis “limpos” e ampliação de
investimentos em fontes de energia renováveis; em adição uma justificativa é apresentada: o
preço da energia elétrica gerada localmente é menos volátil que o preço do óleo combustível
consumido, desde que o segundo representa uma pequena parcela da porção energética do
país (MINSK, 2010; SHORT; DENHOLM, 2006).
Uma série de desafios inerente a implantação do sistema de eletrificação no setor
de transportes são revisados: significante estímulo por parte de órgãos federais na manutenção
da tecnologia de EVs em condição competitiva a outras tecnologias, uma infraestrutura de
recarga ineficiente ou inexistente, estrutura regulatória governamental inadequada ou
inexistente, indisponibilidade do sistema em dispor uma demanda elétrica necessária a uma
maciça penetração dos EVs (SIMPÓSIO… MASSACHUSETTS: MITEI, 2010).
Verifica-se que a tecnologia de eletrificação proporciona o benefício da emissão
nula ou reduzida de gases de escape e até mesmo o menor custo por quilômetro em
comparação aos veículos ICE; no entanto, o alcance, o reabastecimento e o custo inicial são
questões que tem limitado o sucesso desta tecnologia. Historicamente, são apresentadas seis
das principais barreiras ao sucesso da eletrificação no setor de transportes (ROMM, 2006):
• Custo inicial elevado por veículo;
• Limitação na capacidade de armazenamento em relação ao tanque combustível;
• Preocupação com a responsabilidade e segurança;
10
• Alto custo de abastecimento (em comparação ao diesel e à gasolina);
• Limitação quanto ao número de estações de recarga; e
• Melhoria na tecnologia de veículos ICE concorrentes.
2.3 Tecnologia de veículos elétricos
Segundo Romm (2006), em um futuro próximo uma grande preferência ao uso de
veículos híbrido ou totalmente elétrico será uma realidade no setor de transporte nas grandes
metrópoles, em vista a redução do consumo de combustíveis fósseis (“repercute na queda da
emissão de gases de efeito estufa de 30% a 50% no setor”), o efeito na redução dos custos
(políticas governamentais estimuladoras) e no compromisso segurança e desempenho.
Uma alternativa tecnológica, em substituição à tecnologia de veículos ICE,
movidos a combustíveis fósseis, é a tecnologia de eletrificação em veículos. A rigor, três
diferentes tecnologias embarcadas em veículos elétricos são apresentadas a seguir
(SIMPÓSIO… MASSACHUSETTS: MITEI, 2010):
a) Veículo Elétrico Híbrido (HEV): possui um motor ICE e um motor elétrico de
propulsão, os quais podem ser ajustados na configuração série ou paralela.
Durante a frenagem do veículo, parte da energia cinética do movimento é
regenerada de modo a recarregar as baterias do veículo, sendo está única forma
possível para a recarga das mesmas;
b) Veículo Elétrico Híbrido com Plug (PHEV): semelhante ao HEV, mas com
particularidade de recarga das baterias por uma fonte de potência externa; e
c) Veículos elétricos à bateria (BEV): possui um motor elétrico de propulsão e um
banco de baterias recarregáveis a partir da regeneração na frenagem ou por
uma fonte de potência externa.
Devido às inúmeras opções em tecnologia de propulsão aplicadas a EVs, verifica-
se a necessidade em classificar as características técnicas dos veículos quanto à eletrificação
na propulsão. O Grau de Eletrificação (DOE) é um número adimensional e limitado ao valor
unitário, este expressa à dominância da potência do sistema elétrico de propulsão (mínima
potência avaliada para o motor elétrico ou energia armazenada no sistema de baterias) em
relação à potência total do sistema de propulsão do veículo (DUVALL, 2010).
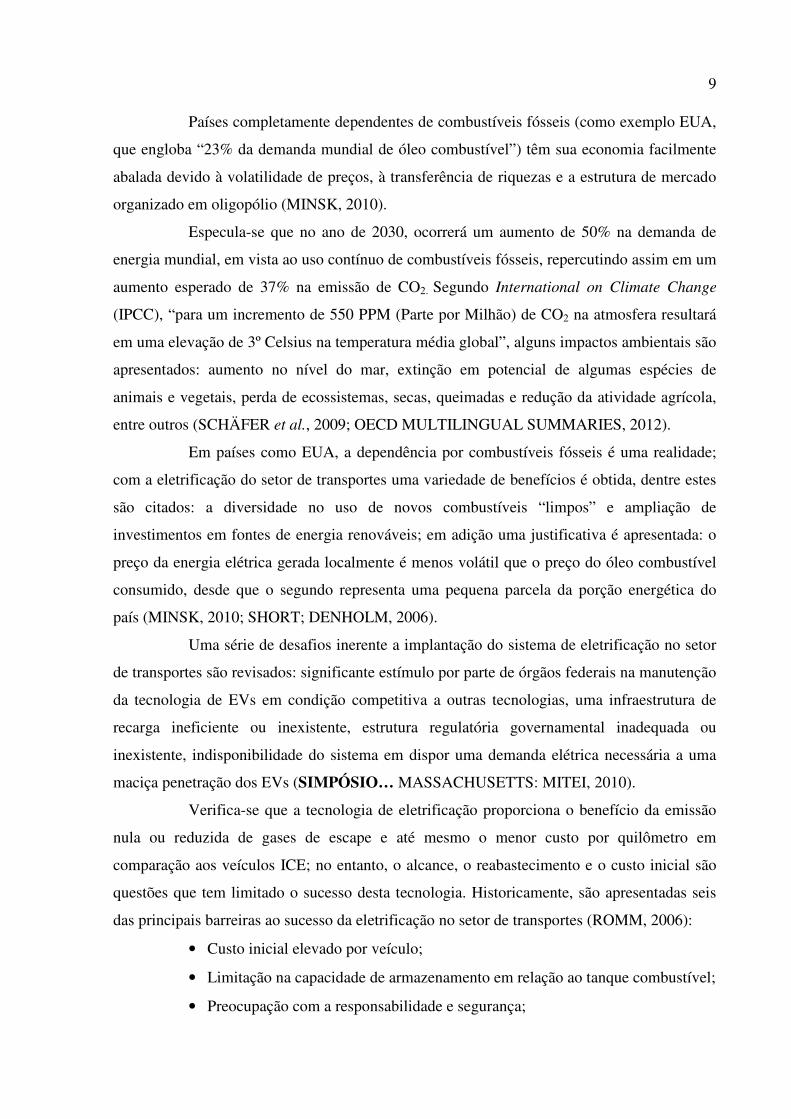
É ilustrado na Figura 2.2 o DOE para diferentes categorias de veículos, observa-se
um aumento no grau de eletrificação iniciando no veículo ICE (DOE = 0) e finalizando no
11 veículo totalmente elétrico (DOE = 1); de forma semelhante, um aumento do grau de
hibridização pode ser observado com o aumento do DOE.
Figura 2.2 – Aumento do DOE e do grau de hibridização
Conventional
Vehicle
Mild HybridElectric Vehicle
Full HybridElectric Vehicle
Plug-in HybridElectric Vehicle
Extended Range
Electric Vehicle
ElectricVehicle
10
Degree-of-Hybridization
Fonte: adaptada (DUVALL, 2010).
O trem de potência (Drive Train) “é parte mecânica do veículo que conecta o
motor ao eixo das rodas”, o qual é composto pelos seguintes elementos: caixa de embreagem,
caixa de redução, eixo árvore, diferencial e semi-eixo. Da mesma forma que em um veículo
do tipo ICE, além de proporcionar todas as funcionalidades básicas (transmissão de potência
mecânica do motor ao eixo das rodas e amplificação de torque, entre outros), o trem de
potência é um item indispensável a um veículo hibrido, pois se verifica a presença de um
motor elétrico de propulsão acoplado a este; três das principais configurações de trem de
potência em HEV e PHEV são tratadas (SCHÄFER et al., 2009):
a) Paralela: nesta configuração, ambos os motores ICE e elétrico garantem a
propulsão do veículo de forma simultânea ou não; durante a frenagem do
veículo, parte da energia pode ser regenerada pelo motor elétrico de modo a
carregar as baterias e usada futuramente na propulsão elétrica; sua aplicação é
mais eficiente em auto-estradas com trânsito rápido e velocidade constante;
b) Série: para esta configuração, o veículo é equipado com um motor ICE e um
motor elétrico, onde o primeiro motor é utilizado somente na recarga das
baterias e o segundo na propulsão do veículo ou de forma paralela (carregar as
baterias durante a frenagem do veículo); devido ao fato de o motor ICE não ser
utilizado na propulsão seu tamanho pode ser reduzido, no entanto o aumento da
capacidade do banco de baterias e o aumento da potência do motor elétrico são
evidenciados; sua aplicação encontra-se em situações onde a recarga inicial do
banco de baterias é necessária após total descarga, ou em auto-estradas com
trânsito lento e velocidade variável; e
c) Power Split ou série/paralelo: verifica-se nesta configuração um misto entre as
duas configurações anteriores, sendo assim o motor ICE na configuração
12
paralela garante a propulsão do veículo ou a recarga das baterias na
configuração série.
Um compromisso deve ser estabelecido entre os requisitos para a escolha da
tecnologia de veículo elétrico adequado à aplicação, sendo estes requisitos: massa, alcance,
custo e infraestrutura (comentado na seção 2.4).
O requisito massa engloba todos os acessórios e elementos em um veículo, pode-
se verificar uma massa variável quanto ao tipo de tecnologia de eletrificação e a configuração
da caixa de redução. O requisito alcance é definido como a distância que um veículo pode
percorrer em um único ciclo de carga em comparação com o tanque de combustível fóssil, ou
ambos, dependendo do DOE do sistema métrico utilizado e das características de trânsito
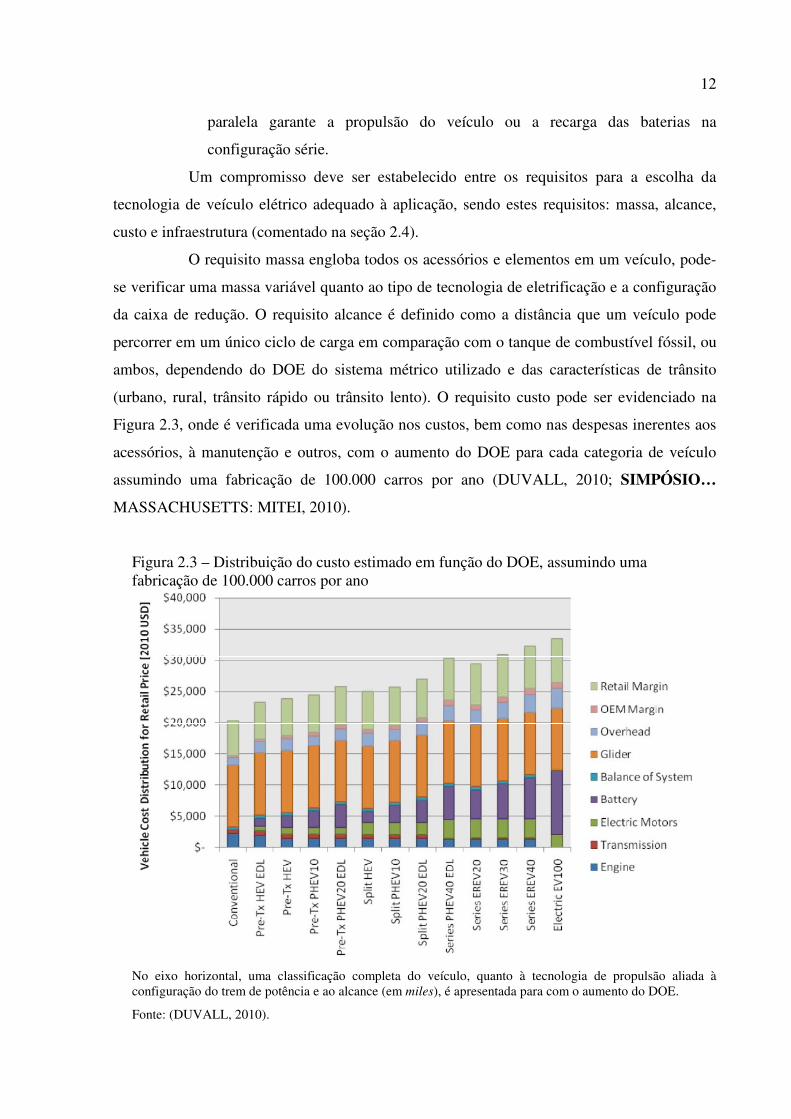
(urbano, rural, trânsito rápido ou trânsito lento). O requisito custo pode ser evidenciado na
Figura 2.3, onde é verificada uma evolução nos custos, bem como nas despesas inerentes aos
acessórios, à manutenção e outros, com o aumento do DOE para cada categoria de veículo
assumindo uma fabricação de 100.000 carros por ano (DUVALL, 2010; SIMPÓSIO…
MASSACHUSETTS: MITEI, 2010).
Figura 2.3 – Distribuição do custo estimado em função do DOE, assumindo uma fabricação de 100.000 carros por ano
No eixo horizontal, uma classificação completa do veículo, quanto à tecnologia de propulsão aliada à configuração do trem de potência e ao alcance (em miles), é apresentada para com o aumento do DOE.
Fonte: (DUVALL, 2010).
13
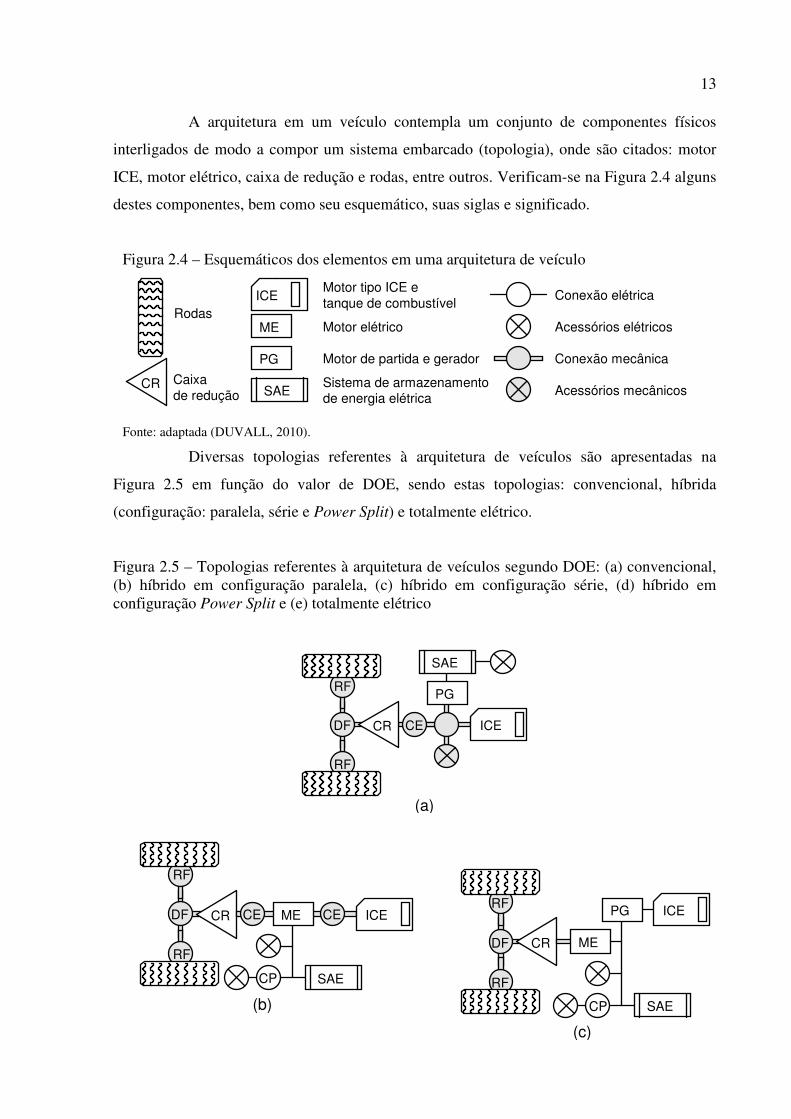
A arquitetura em um veículo contempla um conjunto de componentes físicos
interligados de modo a compor um sistema embarcado (topologia), onde são citados: motor
ICE, motor elétrico, caixa de redução e rodas, entre outros. Verificam-se na Figura 2.4 alguns
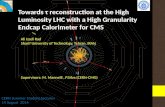
destes componentes, bem como seu esquemático, suas siglas e significado.
Figura 2.4 – Esquemáticos dos elementos em uma arquitetura de veículo
Rodas
CR Caixa
ICEMotor tipo ICE e
tanque de combustível
ME Motor elétrico
Motor de partida e gerador
Sistema de armazenamento de energia elétrica
Conexão elétrica
Acessórios elétricos
Conexão mecânica
Acessórios mecânicosde redução
PG
SAE
Fonte: adaptada (DUVALL, 2010).
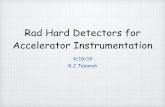
Diversas topologias referentes à arquitetura de veículos são apresentadas na
Figura 2.5 em função do valor de DOE, sendo estas topologias: convencional, híbrida
(configuração: paralela, série e Power Split) e totalmente elétrico.
Figura 2.5 – Topologias referentes à arquitetura de veículos segundo DOE: (a) convencional, (b) híbrido em configuração paralela, (c) híbrido em configuração série, (d) híbrido em configuração Power Split e (e) totalmente elétrico
SAE
PG
ICE
(a)
CR CEDF
RF
RF
CR
(b)
ICEME
SAE
DF
RF
RF
CE CE
CP
CR
(c)
ME
SAE
PG ICERF
RF
DF
CP
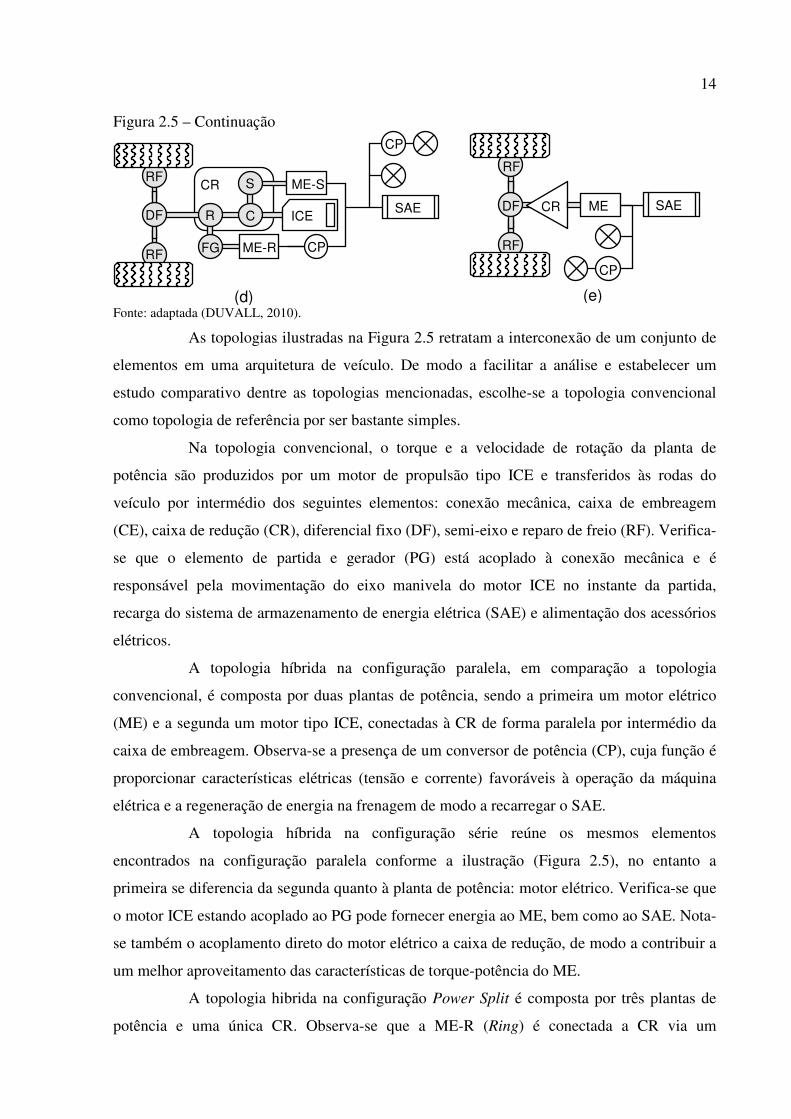
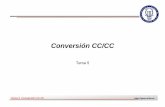
14 Figura 2.5 – Continuação
(d)
ICE
CR
ME-R
ME-S
SAEDF
RF
RF
R
CP
CP
C
S
FG
CR
(e)
ME SAE
RF
RF
CP
DF
Fonte: adaptada (DUVALL, 2010).
As topologias ilustradas na Figura 2.5 retratam a interconexão de um conjunto de
elementos em uma arquitetura de veículo. De modo a facilitar a análise e estabelecer um
estudo comparativo dentre as topologias mencionadas, escolhe-se a topologia convencional
como topologia de referência por ser bastante simples.
Na topologia convencional, o torque e a velocidade de rotação da planta de
potência são produzidos por um motor de propulsão tipo ICE e transferidos às rodas do
veículo por intermédio dos seguintes elementos: conexão mecânica, caixa de embreagem
(CE), caixa de redução (CR), diferencial fixo (DF), semi-eixo e reparo de freio (RF). Verifica-
se que o elemento de partida e gerador (PG) está acoplado à conexão mecânica e é
responsável pela movimentação do eixo manivela do motor ICE no instante da partida,
recarga do sistema de armazenamento de energia elétrica (SAE) e alimentação dos acessórios
elétricos.
A topologia híbrida na configuração paralela, em comparação a topologia
convencional, é composta por duas plantas de potência, sendo a primeira um motor elétrico
(ME) e a segunda um motor tipo ICE, conectadas à CR de forma paralela por intermédio da
caixa de embreagem. Observa-se a presença de um conversor de potência (CP), cuja função é
proporcionar características elétricas (tensão e corrente) favoráveis à operação da máquina
elétrica e a regeneração de energia na frenagem de modo a recarregar o SAE.
A topologia híbrida na configuração série reúne os mesmos elementos
encontrados na configuração paralela conforme a ilustração (Figura 2.5), no entanto a
primeira se diferencia da segunda quanto à planta de potência: motor elétrico. Verifica-se que
o motor ICE estando acoplado ao PG pode fornecer energia ao ME, bem como ao SAE. Nota-
se também o acoplamento direto do motor elétrico a caixa de redução, de modo a contribuir a
um melhor aproveitamento das características de torque-potência do ME.
A topologia hibrida na configuração Power Split é composta por três plantas de
potência e uma única CR. Observa-se que a ME-R (Ring) é conectada a CR via um
15 acoplamento mecânico fixo (Fixed Gear) e sua função é promover um torque de propulsão; a
ME-S (Speeder) desempenha a função de gerador, onde parte da energia mecânica da CR é
recuperada; e, em seguida, o motor ICE é conectado ao eixo principal da CR (Carrier).
A topologia totalmente elétrica permite um melhor aproveitamento das
características torque-velocidade da ME, onde seu acoplamento direto à CR proporciona uma
relação de transmissão fixa, uma redução do número de componentes mecânicos e uma
limitação das características da máquina elétrica a uma região segura de operação.
2.4 Infraestrutura
Para o sucesso da eletrificação no setor de transportes uma infraestrutura
associada é necessária, a qual contempla as estações de recarga em residências, em locais
públicos e ao longo das rodovias, entre outras; bem como um planejamento estratégico do
sistema elétrico de potência (ISO/RTO COUNCIL, 2010).
Verifica-se que a tecnologia de eletrificação no setor de transporte exigirá uma
demanda de energia significativa do sistema elétrico local, a implantação de políticas
legislativas e políticas de investimento no setor. Portanto, alguns meios que garantem o
sucesso da eletrificação no setor de transportes (acessibilidade, padronização e adaptabilidade)
são comentados (SCHÄFER et al., 2009).
A acessibilidade contempla a infraestrutura relacionada à fácil disponibilidade
de pontos de recarga para EVs em residências, em múltiplas unidades consumidoras (edifícios
residências) e em locais públicos; observa-se em locais públicos (área urbana com elevada
concentração populacional) a necessidade de estações de recarga para EVs capaz de suprir as
necessidades locais. De certo modo, alguns fatores devem ser considerados durante a
instalação de estações de recarga em locais públicos adequados (SIMPÓSIO…
MASSACHUSETTS: MITEI, 2010):
a) Localização: em vagas de estacionamento próximas às propriedades, desde que
não sejam modificadas as antigas funcionalidades da vaga destinada aos
veículos convencionais;
b) Projeto: em consideração ao impacto provocado ao sistema elétrico local, o
serviço de recarga deve prover uma forma de pagamento em função da
legislação local;
16
c) Equidade: a partir da limitação da quantidade de pontos de recarga, do tempo
necessário à recarga, do horário do dia e da quantidade de veículos em espera,
o serviço de recarga deve reduzir o tempo de espera.
Uma questão bastante complexa relacionada à acessibilidade do serviço de
recarga em uma residência pode ser comentada. Dependendo da capacidade e do nível de
desgaste da bateria, o tempo de recarga não segue um padrão, o qual é limitado à potência
instalada na residência para o serviço (SIMPÓSIO… MASSACHUSETTS: MITEI, 2010).
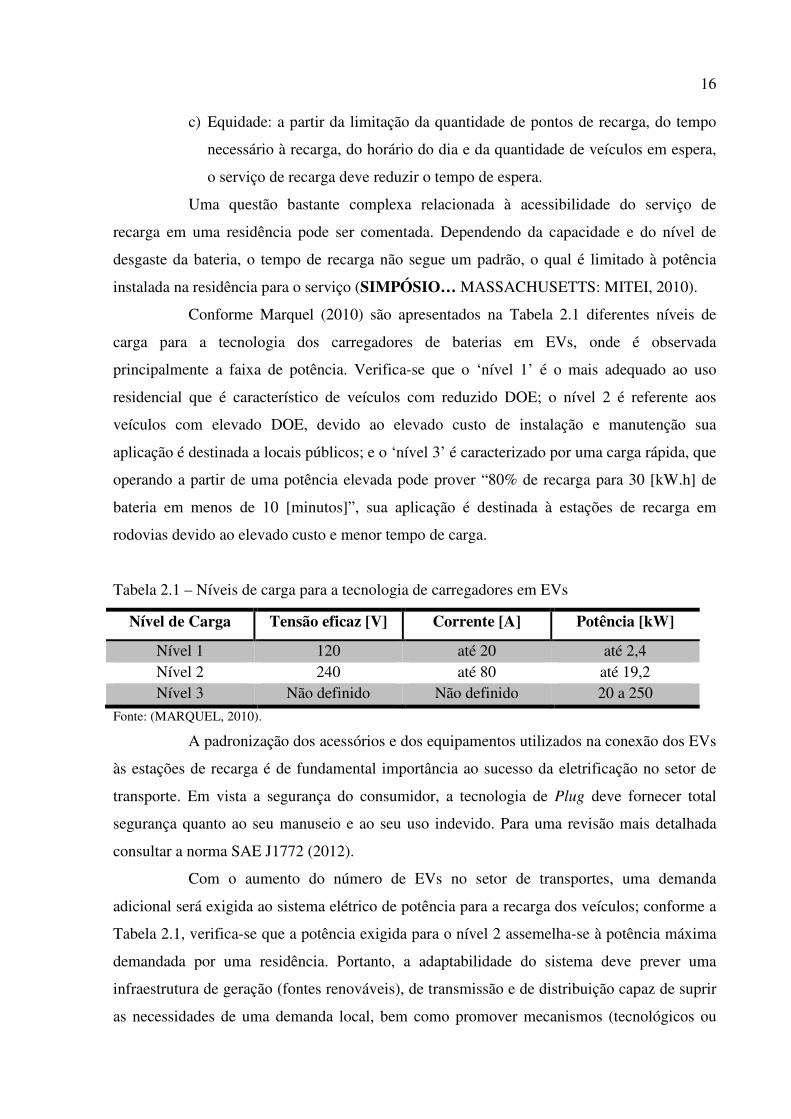
Conforme Marquel (2010) são apresentados na Tabela 2.1 diferentes níveis de
carga para a tecnologia dos carregadores de baterias em EVs, onde é observada
principalmente a faixa de potência. Verifica-se que o ‘nível 1’ é o mais adequado ao uso
residencial que é característico de veículos com reduzido DOE; o nível 2 é referente aos
veículos com elevado DOE, devido ao elevado custo de instalação e manutenção sua
aplicação é destinada a locais públicos; e o ‘nível 3’ é caracterizado por uma carga rápida, que
operando a partir de uma potência elevada pode prover “80% de recarga para 30 [kW.h] de
bateria em menos de 10 [minutos]”, sua aplicação é destinada à estações de recarga em
rodovias devido ao elevado custo e menor tempo de carga.
Tabela 2.1 – Níveis de carga para a tecnologia de carregadores em EVs
Nível de Carga Tensão eficaz [V] Corrente [A] Potência [kW]
Nível 1 120 até 20 até 2,4 Nível 2 240 até 80 até 19,2 Nível 3 Não definido Não definido 20 a 250
Fonte: (MARQUEL, 2010).
A padronização dos acessórios e dos equipamentos utilizados na conexão dos EVs
às estações de recarga é de fundamental importância ao sucesso da eletrificação no setor de
transporte. Em vista a segurança do consumidor, a tecnologia de Plug deve fornecer total
segurança quanto ao seu manuseio e ao seu uso indevido. Para uma revisão mais detalhada
consultar a norma SAE J1772 (2012).
Com o aumento do número de EVs no setor de transportes, uma demanda
adicional será exigida ao sistema elétrico de potência para a recarga dos veículos; conforme a
Tabela 2.1, verifica-se que a potência exigida para o nível 2 assemelha-se à potência máxima
demandada por uma residência. Portanto, a adaptabilidade do sistema deve prever uma
infraestrutura de geração (fontes renováveis), de transmissão e de distribuição capaz de suprir
as necessidades de uma demanda local, bem como promover mecanismos (tecnológicos ou
17 legislativos) que permitam a recarga dos veículos em locais e em períodos apropriados com
custo reduzido pelo serviço (SIMPÓSIO… MASSACHUSETTS: MITEI, 2010).
O conceito de veículo conectado ao sistema ou Vehicle-to-Grid (V2G) quando
estacionado oferece a oportunidade de um serviço complementar de geração de energia
(serviço ancilar), o qual é caracterizado por uma rápida resposta dinâmica às possíveis
flutuações de carga no sistema elétrico. Estando o veículo conectado ao sistema maior parte
do tempo (apenas 4% do tempo é utilizado em atividades que envolvem transporte), a energia
acumulada no banco de baterias pode ser entregue ao sistema elétrico ou armazenada quando
necessitada. Observa-se que o serviço deve prover um gerenciamento centralizado ou
distribuído, permitindo assim um controle a nível individual ou nível de grupo em função da
demanda de uma região, bem como resposta inteligente às situações favoráveis a compra e
venda de energia ao longo do dia (SHORT; DENHOLM, 2006; BROOKS; GAGE, 2001).
2.5 Legislação e política de investimento
Diante da crescente onda de problemas no setor de transportes, proveniente da
dependência por combustíveis de natureza fóssil, que repercutem em impactos ambientais e
econômicos, verifica-se a necessidade em estabelecer políticas estratégicas capazes de agregar
um desenvolvimento tecnológico ao setor de transporte, permitindo assim à adoção de
políticas energéticas coerente à nação.
Conforme apresentado no simpósio (SIMPÓSIO… MASSACHUSETTS: MITEI,
2010), verifica-se que o governo (dos EUA) pode ou não exercer um papel fundamental no
desenvolvimento tecnológico no setor de transporte, visto que sua dependência está
condicionada a política de investimento praticada e suas estratégias.
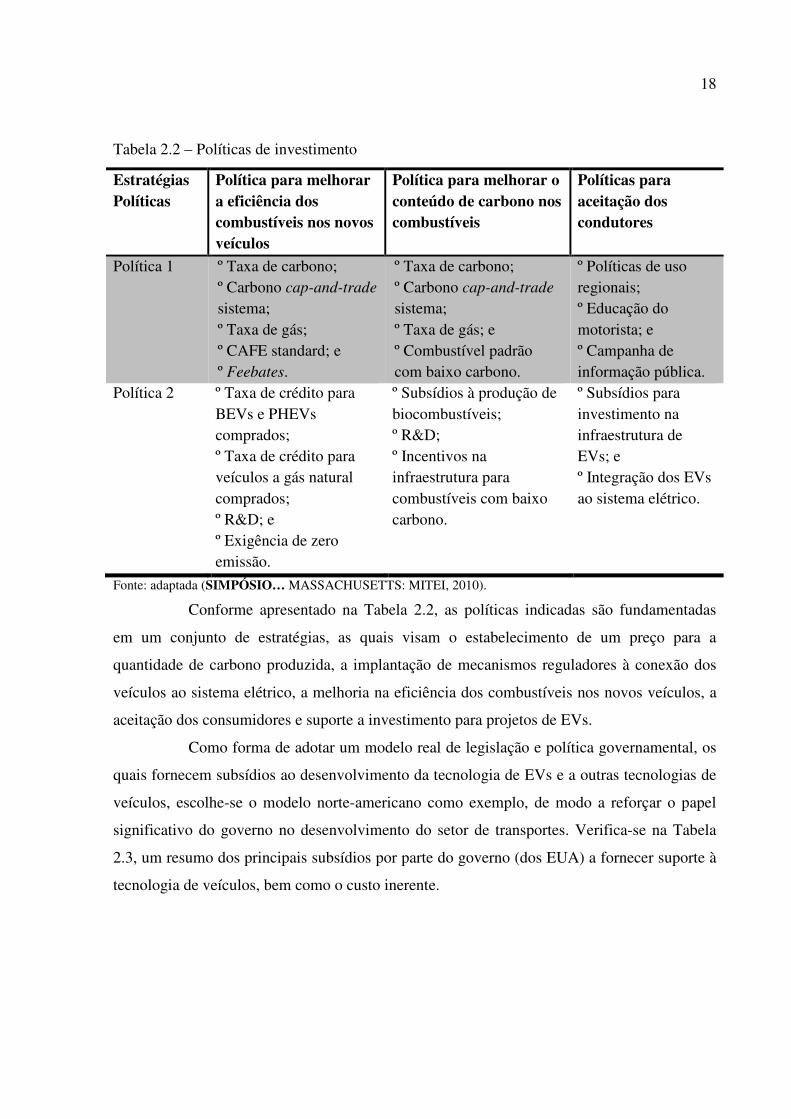
Observam-se na Tabela 2.2 duas das principais políticas de investimento
praticadas; a política 1 foca na não intervenção direta do governo, permitindo assim uma
maior flexibilidade na livre escolha da tecnologia mais adequada ao consumidor dentre à
diversidade de tecnologias disponíveis no mercado; e a política 2 foca na intervenção direta
do governo em fornecer suporte à tecnologia de eletrificação, de modo a alcançar os máximos
benefícios sociais, culturais e econômicos.
18
Tabela 2.2 – Políticas de investimento
Estratégias Políticas
Política para melhorar a eficiência dos combustíveis nos novos veículos
Política para melhorar o conteúdo de carbono nos combustíveis
Políticas para aceitação dos condutores
Política 1 º Taxa de carbono; º Carbono cap-and-trade sistema; º Taxa de gás; º CAFE standard; e º Feebates.
º Taxa de carbono; º Carbono cap-and-trade sistema; º Taxa de gás; e º Combustível padrão com baixo carbono.
º Políticas de uso regionais; º Educação do motorista; e º Campanha de informação pública.
Política 2 º Taxa de crédito para BEVs e PHEVs comprados; º Taxa de crédito para veículos a gás natural comprados; º R&D; e º Exigência de zero emissão.
º Subsídios à produção de biocombustíveis; º R&D; º Incentivos na infraestrutura para combustíveis com baixo carbono.
º Subsídios para investimento na infraestrutura de EVs; e º Integração dos EVs ao sistema elétrico.
Fonte: adaptada (SIMPÓSIO… MASSACHUSETTS: MITEI, 2010).
Conforme apresentado na Tabela 2.2, as políticas indicadas são fundamentadas
em um conjunto de estratégias, as quais visam o estabelecimento de um preço para a
quantidade de carbono produzida, a implantação de mecanismos reguladores à conexão dos
veículos ao sistema elétrico, a melhoria na eficiência dos combustíveis nos novos veículos, a
aceitação dos consumidores e suporte a investimento para projetos de EVs.
Como forma de adotar um modelo real de legislação e política governamental, os
quais fornecem subsídios ao desenvolvimento da tecnologia de EVs e a outras tecnologias de
veículos, escolhe-se o modelo norte-americano como exemplo, de modo a reforçar o papel
significativo do governo no desenvolvimento do setor de transportes. Verifica-se na Tabela
2.3, um resumo dos principais subsídios por parte do governo (dos EUA) a fornecer suporte à
tecnologia de veículos, bem como o custo inerente.
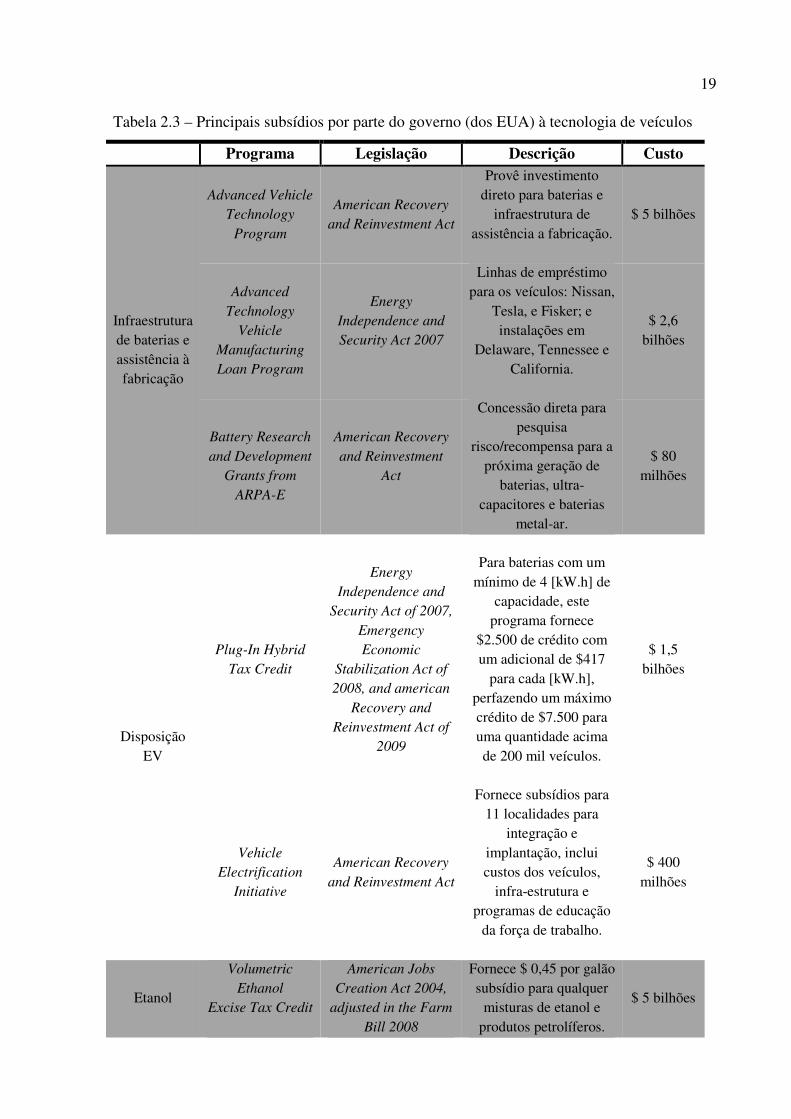
19 Tabela 2.3 – Principais subsídios por parte do governo (dos EUA) à tecnologia de veículos
Programa Legislação Descrição Custo
Infraestrutura de baterias e assistência à fabricação
Advanced Vehicle
Technology
Program
American Recovery
and Reinvestment Act
Provê investimento direto para baterias e
infraestrutura de assistência a fabricação.
$ 5 bilhões
Advanced
Technology
Vehicle
Manufacturing
Loan Program
Energy
Independence and
Security Act 2007
Linhas de empréstimo para os veículos: Nissan,
Tesla, e Fisker; e instalações em
Delaware, Tennessee e California.
$ 2,6 bilhões
Battery Research
and Development
Grants from
ARPA-E
American Recovery
and Reinvestment
Act
Concessão direta para pesquisa
risco/recompensa para a próxima geração de
baterias, ultra-capacitores e baterias
metal-ar.
$ 80 milhões
Disposição EV
Plug-In Hybrid
Tax Credit
Energy
Independence and
Security Act of 2007,
Emergency
Economic
Stabilization Act of
2008, and american
Recovery and
Reinvestment Act of
2009
Para baterias com um
mínimo de 4 [kW.h] de capacidade, este
programa fornece $2.500 de crédito com um adicional de $417
para cada [kW.h], perfazendo um máximo crédito de $7.500 para uma quantidade acima de 200 mil veículos.
$ 1,5 bilhões
Vehicle
Electrification
Initiative
American Recovery
and Reinvestment Act
Fornece subsídios para 11 localidades para
integração e implantação, inclui custos dos veículos,
infra-estrutura e programas de educação
da força de trabalho.
$ 400 milhões
Etanol
Volumetric
Ethanol
Excise Tax Credit
American Jobs
Creation Act 2004,
adjusted in the Farm
Bill 2008
Fornece $ 0,45 por galão subsídio para qualquer
misturas de etanol e produtos petrolíferos.
$ 5 bilhões
20 Tabela 2.3 – Continuação
Veículos a gás natural e infraestrutura
Income Tax
Credits
for Alternative
Fuel
Vehicles
Energy Policy Act of
2005
Fornece um crédito de imposto para a compra
de veículo a gás natural.
$ 2,5 a 32 mil por veículo
Income Tax
Credits for
Alternative Fuel
Infrastructure
Energy Policy Act of
2005
Fornece um crédito de imposto para a
instalação de gás natural de reabastecimento e
equipamentos.
$30.000 para
estações de recarga e $1.000
residências
Fonte: adaptada (SIMPÓSIO… MASSACHUSETTS: MITEI, 2010).
2.6 Critérios de escolha entre tecnologias de bateria
Com a eletrificação do setor de transportes, a evolução da tecnologia de baterias
em muito tem a contribuir para o novo conceito de locomoção, em vista a redução dos custos
relacionados à aquisição, à manutenção e a sua reciclagem. Constata-se que o custo com
baterias é o principal fator promovedor da diferença de preços entre um veículo ICE
convencional e um EV, no momento da aquisição (ROMM, 2006).
Segundo um estudo, a tecnologia de baterias Lithium-Ion (Li-Ion) é a principal
candidata à padronização das baterias em EVs quando observado o quesito custo-benefício;
em um futuro próximo, constata-se que os PHEVs e BEVs estarão em condições de competir
com os veículos ICE convencionais no quesito custo-benefício, quando o custo com baterias
for estimado em torno de 300 [$/kW.h] (valor baseado no preço médio 3,21 [$/gallon] cotado
em 2008) (BROOKER; THORNTON; RUGH, 2010; SIMPÓSIO… MASSACHUSETTS:
MITEI, 2010).
Tradicionalmente, utiliza-se o preço por [kW.h] como critério de medida e escolha
entre as diferentes tecnologias de baterias disponíveis no mercado, no entanto outros critérios
devem ser utilizados em complementação, os quais são vistos na Tabela 2.4.
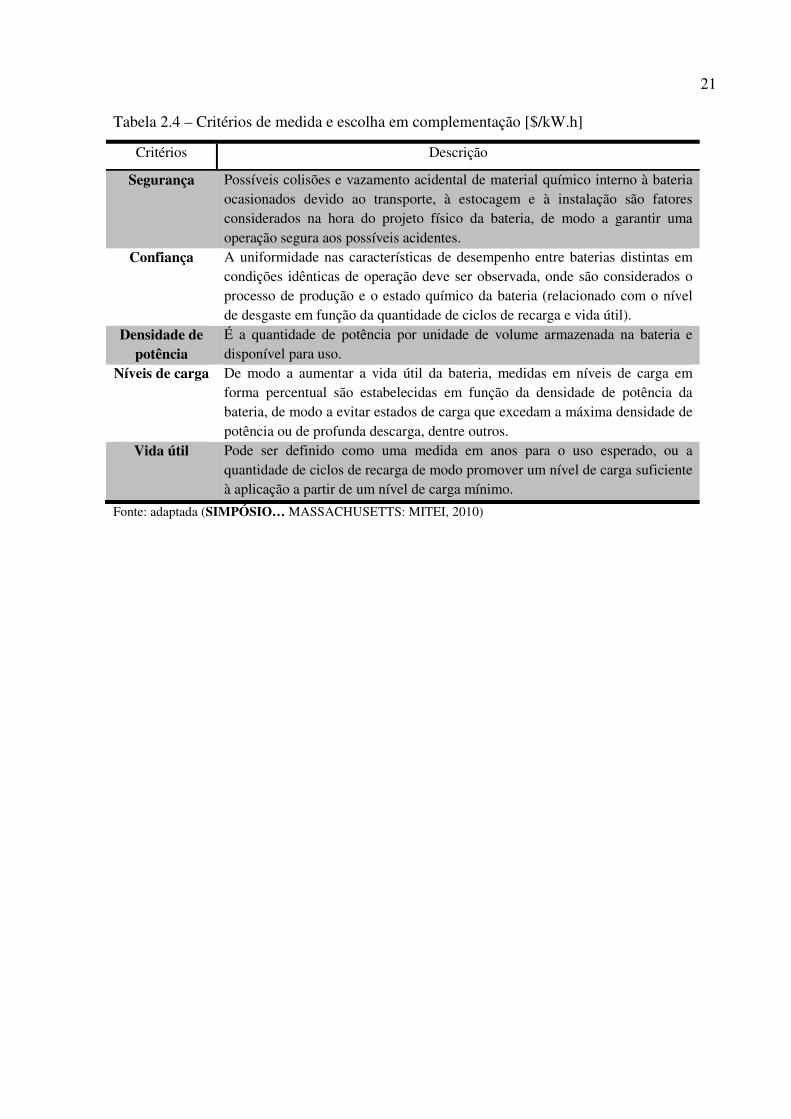
21 Tabela 2.4 – Critérios de medida e escolha em complementação [$/kW.h]
Critérios Descrição
Segurança Possíveis colisões e vazamento acidental de material químico interno à bateria ocasionados devido ao transporte, à estocagem e à instalação são fatores considerados na hora do projeto físico da bateria, de modo a garantir uma operação segura aos possíveis acidentes.
Confiança A uniformidade nas características de desempenho entre baterias distintas em condições idênticas de operação deve ser observada, onde são considerados o processo de produção e o estado químico da bateria (relacionado com o nível de desgaste em função da quantidade de ciclos de recarga e vida útil).
Densidade de potência
É a quantidade de potência por unidade de volume armazenada na bateria e disponível para uso.
Níveis de carga De modo a aumentar a vida útil da bateria, medidas em níveis de carga em forma percentual são estabelecidas em função da densidade de potência da bateria, de modo a evitar estados de carga que excedam a máxima densidade de potência ou de profunda descarga, dentre outros.
Vida útil Pode ser definido como uma medida em anos para o uso esperado, ou a quantidade de ciclos de recarga de modo promover um nível de carga suficiente à aplicação a partir de um nível de carga mínimo.
Fonte: adaptada (SIMPÓSIO… MASSACHUSETTS: MITEI, 2010)
22 CAPÍTULO 3 – FUNDAMENTOS DE UM VEÍCULO ELÉTRICO
Neste terceiro capítulo, uma fundamentação teórica inerente aos principais
componentes de um EV é apresentada. São tratados em sequência: introdução, fundamentos
de um veículo e especificações técnicas do conversor CC-CA.
3.1 Introdução
Um veículo automotivo é descrito pela interconexão de um conjunto de elementos
mecânicos e sua operação harmoniosa. A partir das leis básicas da mecânica, a dinâmica do
movimento do veículo pode ser analisada e seus elementos projetados, em respeito às
especificações de engenharia e as situações de operação adversas.
De certo modo, a teoria apresentada ao longo deste capítulo consiste em fornecer
uma fundamentação teórica inicial que auxilie no desenvolvimento dos capítulos seguintes.
Em (EHSANI et al., 2010) é verificada uma coletânea de informação a cerca dos
sistemas automotivos e sua aplicação à indústria automobilística, bem como uma revisão
bibliográfica detalhada (impacto ambiental, fundamentos de veículo, regeneração na frenagem
e tecnologia de baterias, entre outros), em complementação são citadas as seguintes
referências (BOSCH, 2002; BLUNDELL; HARTY, 2004; WONG, 2001; JAZAR, 2008). Em
(DAHER, 2006) é descrito, analisado e experimentado um conversor CC-CA baseado em
uma topologia multinível, cuja aplicação se destina a sistemas de energia renováveis Stand-
alone. Verifica-se em (SCHÄFER, et al. 2009) um estudo sistemático relacionado aos vários
fatores que afetam a emissão GHG inerente aos meios de transporte de passageiros nos EUA e
em escala global, em função do alcance, da demanda de viagem, do comportamento dos
consumidores e das indústrias e de políticas climáticas, entre outros.
Conforme ilustrado na Figura 3.1, observa-se o modelo de veículo elétrico
automotivo adotado, o qual foi escolhido na apresentação deste capítulo. Considerando o
fluxo de energia no sentido direto (energia química convertida em energia de movimento)
uma descrição é apresentada. Primeiramente, nota-se que o SAE estabelece um mecanismo de
armazenamento e conversão de energia elétrica em energia química ou vice-versa; em seguida,
nota-se a presença de dois conversores de potência (CC-CC e CC-CA) em série, manipulando
assim as grandezas elétricas (tensão e corrente) de forma adequada à operação da máquina
elétrica; a diante, a ME é a planta de potência do sistema, cuja finalidade é promover torque e
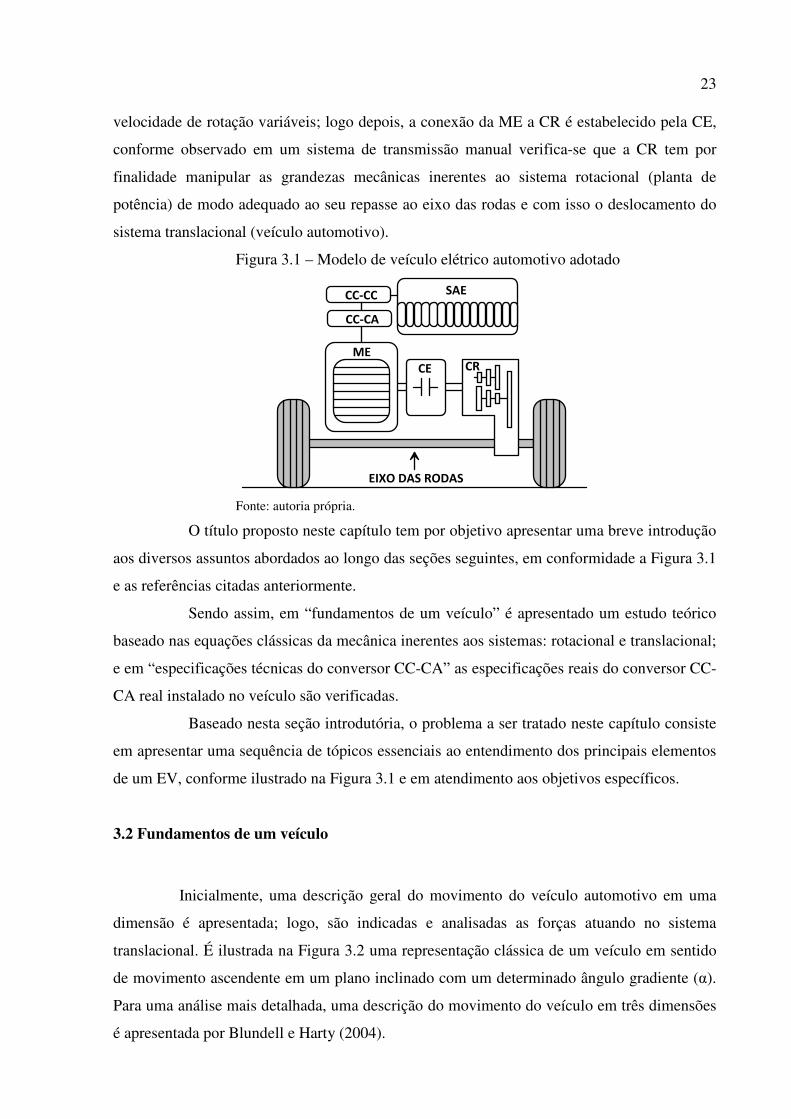
23 velocidade de rotação variáveis; logo depois, a conexão da ME a CR é estabelecido pela CE,
conforme observado em um sistema de transmissão manual verifica-se que a CR tem por
finalidade manipular as grandezas mecânicas inerentes ao sistema rotacional (planta de
potência) de modo adequado ao seu repasse ao eixo das rodas e com isso o deslocamento do
sistema translacional (veículo automotivo).
Figura 3.1 – Modelo de veículo elétrico automotivo adotado
SAE CC-CC
CC-CA
CE CRME
EIXO DAS RODAS Fonte: autoria própria.
O título proposto neste capítulo tem por objetivo apresentar uma breve introdução
aos diversos assuntos abordados ao longo das seções seguintes, em conformidade a Figura 3.1
e as referências citadas anteriormente.
Sendo assim, em “fundamentos de um veículo” é apresentado um estudo teórico
baseado nas equações clássicas da mecânica inerentes aos sistemas: rotacional e translacional;
e em “especificações técnicas do conversor CC-CA” as especificações reais do conversor CC-
CA real instalado no veículo são verificadas.
Baseado nesta seção introdutória, o problema a ser tratado neste capítulo consiste
em apresentar uma sequência de tópicos essenciais ao entendimento dos principais elementos
de um EV, conforme ilustrado na Figura 3.1 e em atendimento aos objetivos específicos.
3.2 Fundamentos de um veículo
Inicialmente, uma descrição geral do movimento do veículo automotivo em uma
dimensão é apresentada; logo, são indicadas e analisadas as forças atuando no sistema
translacional. É ilustrada na Figura 3.2 uma representação clássica de um veículo em sentido
de movimento ascendente em um plano inclinado com um determinado ângulo gradiente (α).
Para uma análise mais detalhada, uma descrição do movimento do veículo em três dimensões
é apresentada por Blundell e Harty (2004).
24
Figura 3.2 – Veículo automotivo em movimento ascendente no plano inclinado
Va
Mv
F
O
ah
dL
tL
eL
dT
tT
rdT
rtT
tdF
ttF
N
a
a
oh
Fonte: autoria própria.
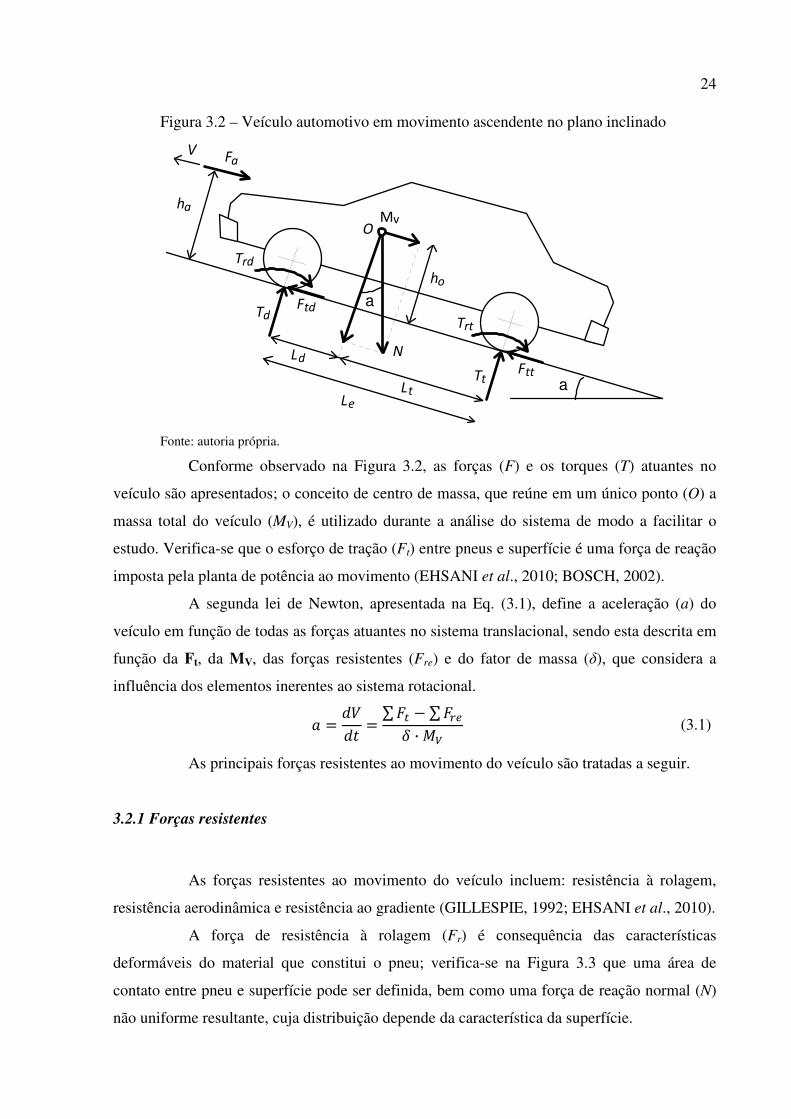
Conforme observado na Figura 3.2, as forças (F) e os torques (T) atuantes no
veículo são apresentados; o conceito de centro de massa, que reúne em um único ponto (O) a
massa total do veículo (MV), é utilizado durante a análise do sistema de modo a facilitar o
estudo. Verifica-se que o esforço de tração (Ft) entre pneus e superfície é uma força de reação
imposta pela planta de potência ao movimento (EHSANI et al., 2010; BOSCH, 2002).
A segunda lei de Newton, apresentada na Eq. (3.1), define a aceleração (a) do
veículo em função de todas as forças atuantes no sistema translacional, sendo esta descrita em
função da Ft, da MV, das forças resistentes (Fre) e do fator de massa (δ), que considera a
influência dos elementos inerentes ao sistema rotacional.
∑ ∑ · (3.1)
As principais forças resistentes ao movimento do veículo são tratadas a seguir.
3.2.1 Forças resistentes
As forças resistentes ao movimento do veículo incluem: resistência à rolagem,
resistência aerodinâmica e resistência ao gradiente (GILLESPIE, 1992; EHSANI et al., 2010).
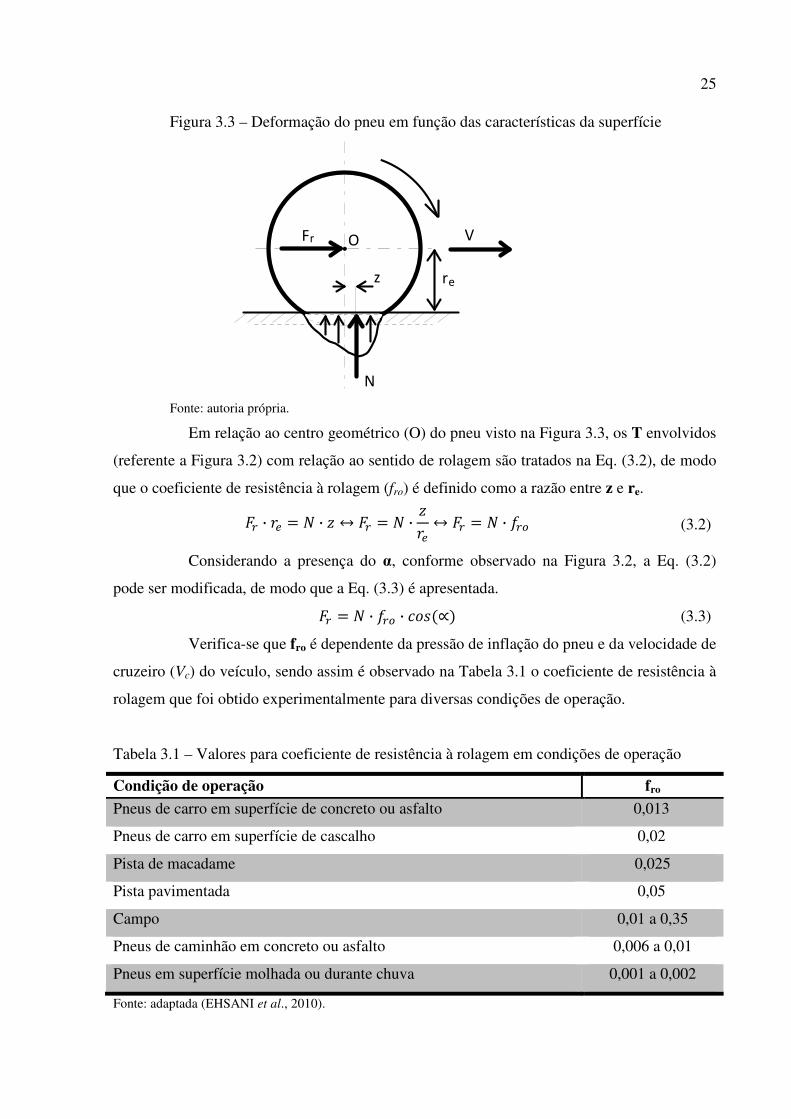
A força de resistência à rolagem (Fr) é consequência das características
deformáveis do material que constitui o pneu; verifica-se na Figura 3.3 que uma área de
contato entre pneu e superfície pode ser definida, bem como uma força de reação normal (N)
não uniforme resultante, cuja distribuição depende da característica da superfície.
25
Figura 3.3 – Deformação do pneu em função das características da superfície
rez
N
F VOr
Fonte: autoria própria.
Em relação ao centro geométrico (O) do pneu visto na Figura 3.3, os T envolvidos
(referente a Figura 3.2) com relação ao sentido de rolagem são tratados na Eq. (3.2), de modo
que o coeficiente de resistência à rolagem (fro) é definido como a razão entre z e re. · · · · (3.2)
Considerando a presença do α, conforme observado na Figura 3.2, a Eq. (3.2)
pode ser modificada, de modo que a Eq. (3.3) é apresentada. · · (3.3)
Verifica-se que fro é dependente da pressão de inflação do pneu e da velocidade de
cruzeiro (Vc) do veículo, sendo assim é observado na Tabela 3.1 o coeficiente de resistência à
rolagem que foi obtido experimentalmente para diversas condições de operação.
Tabela 3.1 – Valores para coeficiente de resistência à rolagem em condições de operação
Condição de operação fro
Pneus de carro em superfície de concreto ou asfalto 0,013
Pneus de carro em superfície de cascalho 0,02
Pista de macadame 0,025
Pista pavimentada 0,05
Campo 0,01 a 0,35
Pneus de caminhão em concreto ou asfalto 0,006 a 0,01
Pneus em superfície molhada ou durante chuva 0,001 a 0,002
Fonte: adaptada (EHSANI et al., 2010).
26
A força de resistência aerodinâmica (Fa) é proveniente da resistência imposta ao
movimento do veículo devido ao contato com o vento, pode-se assim dizer que esta é
consequência de dois fenômenos envolvidos: diferença de pressão e atrito com a superfície. O
primeiro fenômeno surge devido ao movimento não instantâneo da massa de ar, que se
acumula na região dianteira e que se dispersa na região traseira do veículo, repercutindo assim
em locais com diferença de pressão. O segundo fenômeno é consequência da diferença de
velocidade entre as moléculas de ar e as moléculas da superfície de contato do veículo,
contribuindo assim para a existência de uma força de atrito (EHSANI et al., 2010).
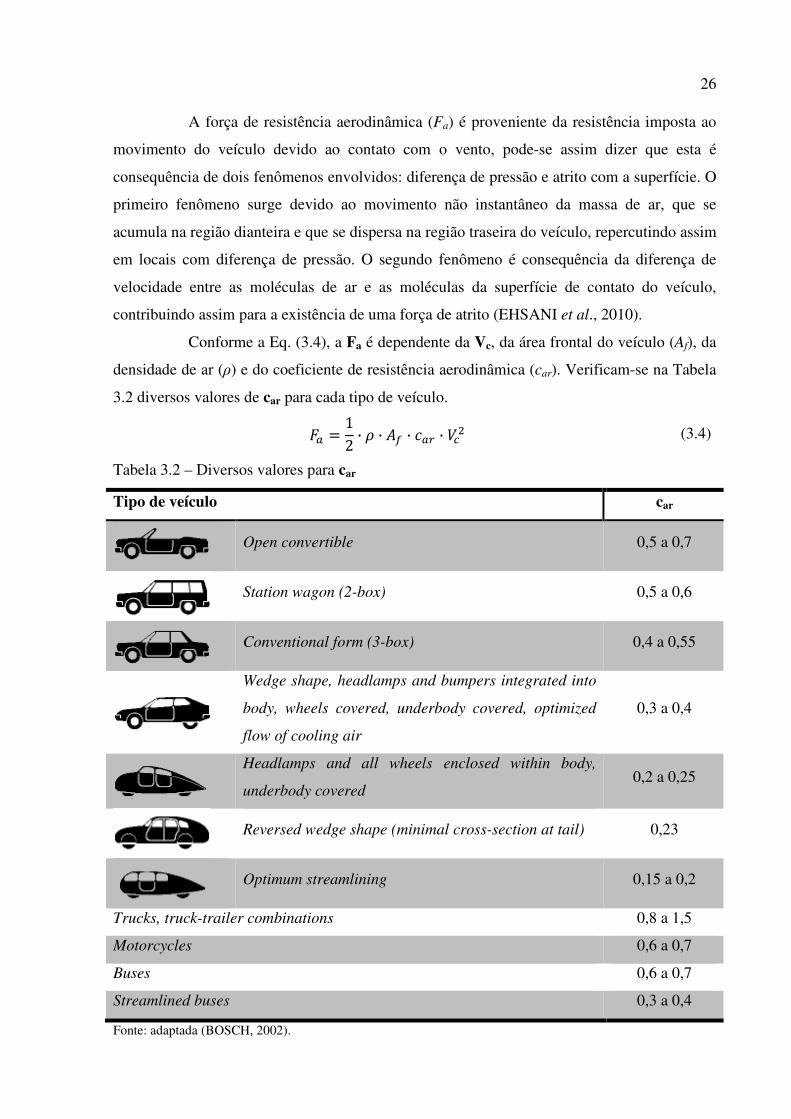
Conforme a Eq. (3.4), a Fa é dependente da Vc, da área frontal do veículo (Af), da
densidade de ar (ρ) e do coeficiente de resistência aerodinâmica (car). Verificam-se na Tabela
3.2 diversos valores de car para cada tipo de veículo.
12 · · ! · · "# (3.4)
Tabela 3.2 – Diversos valores para car
Tipo de veículo car
Open convertible 0,5 a 0,7
Station wagon (2-box) 0,5 a 0,6
Conventional form (3-box) 0,4 a 0,55
Wedge shape, headlamps and bumpers integrated into
body, wheels covered, underbody covered, optimized
flow of cooling air
0,3 a 0,4
Headlamps and all wheels enclosed within body,
underbody covered 0,2 a 0,25
Reversed wedge shape (minimal cross-section at tail) 0,23
Optimum streamlining 0,15 a 0,2
Trucks, truck-trailer combinations 0,8 a 1,5
Motorcycles 0,6 a 0,7
Buses 0,6 a 0,7
Streamlined buses 0,3 a 0,4
Fonte: adaptada (BOSCH, 2002).
27
A força de resistência ao gradiente ou gradeabilidade (Fg) é resultado do
movimento do veículo em um plano inclinado, verifica-se que está força pode se opor (sentido
ascendente) ou favorecer (sentido descendente) o movimento do veículo automotivo; portanto,
a análise aqui desenvolvida faz referência ao caso de oposição ao movimento. Verifica-se na
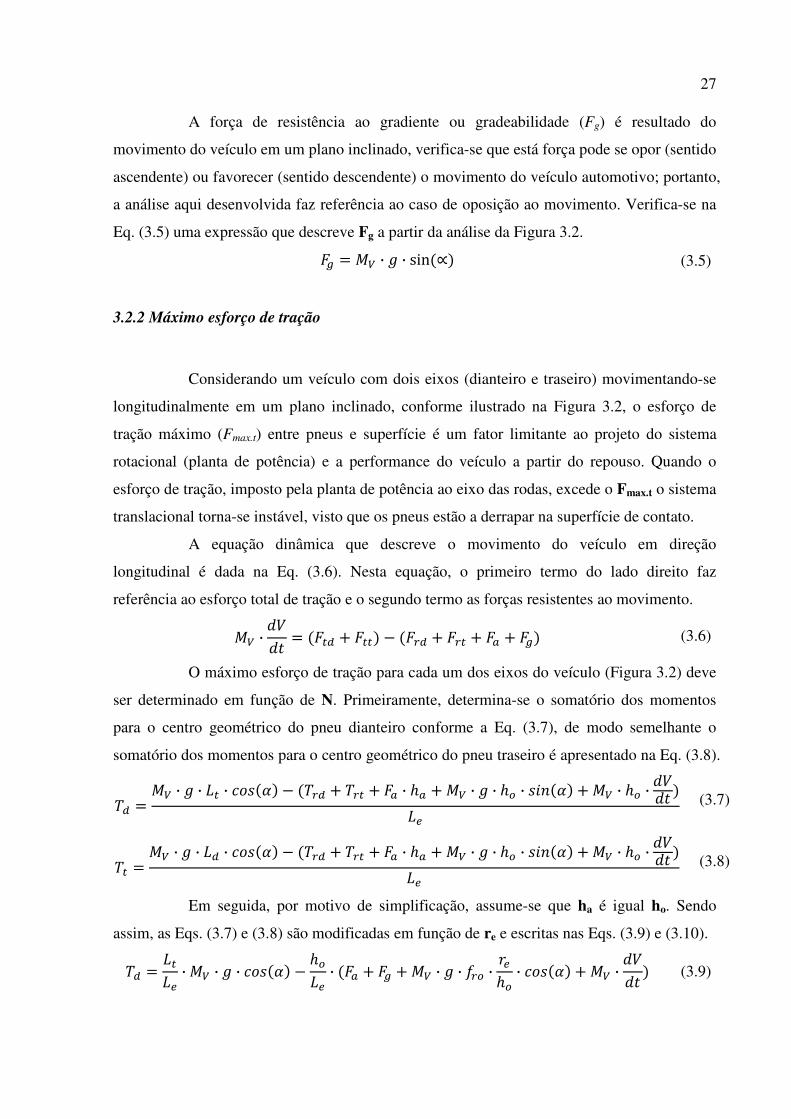
Eq. (3.5) uma expressão que descreve Fg a partir da análise da Figura 3.2. $ · % · sin (3.5)
3.2.2 Máximo esforço de tração
Considerando um veículo com dois eixos (dianteiro e traseiro) movimentando-se
longitudinalmente em um plano inclinado, conforme ilustrado na Figura 3.2, o esforço de
tração máximo (Fmax.t) entre pneus e superfície é um fator limitante ao projeto do sistema
rotacional (planta de potência) e a performance do veículo a partir do repouso. Quando o
esforço de tração, imposto pela planta de potência ao eixo das rodas, excede o Fmax.t o sistema
translacional torna-se instável, visto que os pneus estão a derrapar na superfície de contato.
A equação dinâmica que descreve o movimento do veículo em direção
longitudinal é dada na Eq. (3.6). Nesta equação, o primeiro termo do lado direito faz
referência ao esforço total de tração e o segundo termo as forças resistentes ao movimento.
· ) * ) * * * $
(3.6)
O máximo esforço de tração para cada um dos eixos do veículo (Figura 3.2) deve
ser determinado em função de N. Primeiramente, determina-se o somatório dos momentos
para o centro geométrico do pneu dianteiro conforme a Eq. (3.7), de modo semelhante o
somatório dos momentos para o centro geométrico do pneu traseiro é apresentado na Eq. (3.8).
+) · % · , · - +) * + * · . * · % · . · /0- * · . · ,
(3.7)
+ · % · ,) · - +) * + * · . * · % · . · /0- * · . · ,
(3.8)
Em seguida, por motivo de simplificação, assume-se que ha é igual ho. Sendo
assim, as Eqs. (3.7) e (3.8) são modificadas em função de re e escritas nas Eqs. (3.9) e (3.10).
+) ,, · · % · - ., · * $ * · % · · . · - * ·
(3.9)
28 + ,), · · % · - * ., · * $ * · % · · . · - * ·
(3.10)
Referenciando as Eqs. (3.3) e (3.6), as Eqs. (3.9) e (3.10) podem ser reescritas nas
Eqs. (3.11) e (3.12), onde o primeiro termo do lado direito da expressão define o
comportamento estático e o termo seguinte o comportamento dinâmico.
+) ,, · · % · - ., · · 11 .2 (3.11)
+ ,), · · % · - * ., · · 11 .2 (3.12)
O Fmax.t é descrito como o produto entre a força normal aplicada ao centro do
pneu e o coeficiente de adesão entre pneu-superfície (µ). As Eqs. (3.11) e (3.12) podem ser
reescritas a seguir, respectivamente.
34,) 6 · +) 6 · ,, · · % · - ., · 734,) · 11 .28 (3.13)
34, 6 · + 6 · ,), · · % · - * ., · 734, · 11 .28 (3.14)
Simplificando as Eqs. (3.13) e (3.14), podem ser escritas as Eqs. (3.15) e (3.16).
Nota-se que o máximo esforço de tração transferido pela planta de potência a um dado eixo
não pode exceder o máximo esforço de tração permitido pelo µ, de modo a evitar derrapagem.
34,) 6 · · % · - · 9, * · . :, * 6 · .
(3.15)
34, 6 · · % · - · 9,) · . :, 6 · .
(3.16)
3.2.3 Requisitos de performance
De modo a estabelecer as especificações técnicas para a integração das diferentes
tecnologias de veículos elétricos ao uso urbano, diversos requisitos padronizados que definem
medidas qualitativas e quantitativas são propostos e regulamentados.
Fazendo uso das atribuições da norma padronizada SAE J1666 (adotada como
exemplo), criada pelo programa americano Urban Electric Vehicles (UEV) e praticada dentro
do território norte-americano, esta trata dos requisitos mínimos e necessários para a avaliação
e certificação dos veículos elétricos comercializados, quanto aos seguintes requisitos de
performance: aceleração, desaceleração, gradeabilidade e velocidade desenvolvida (SAE
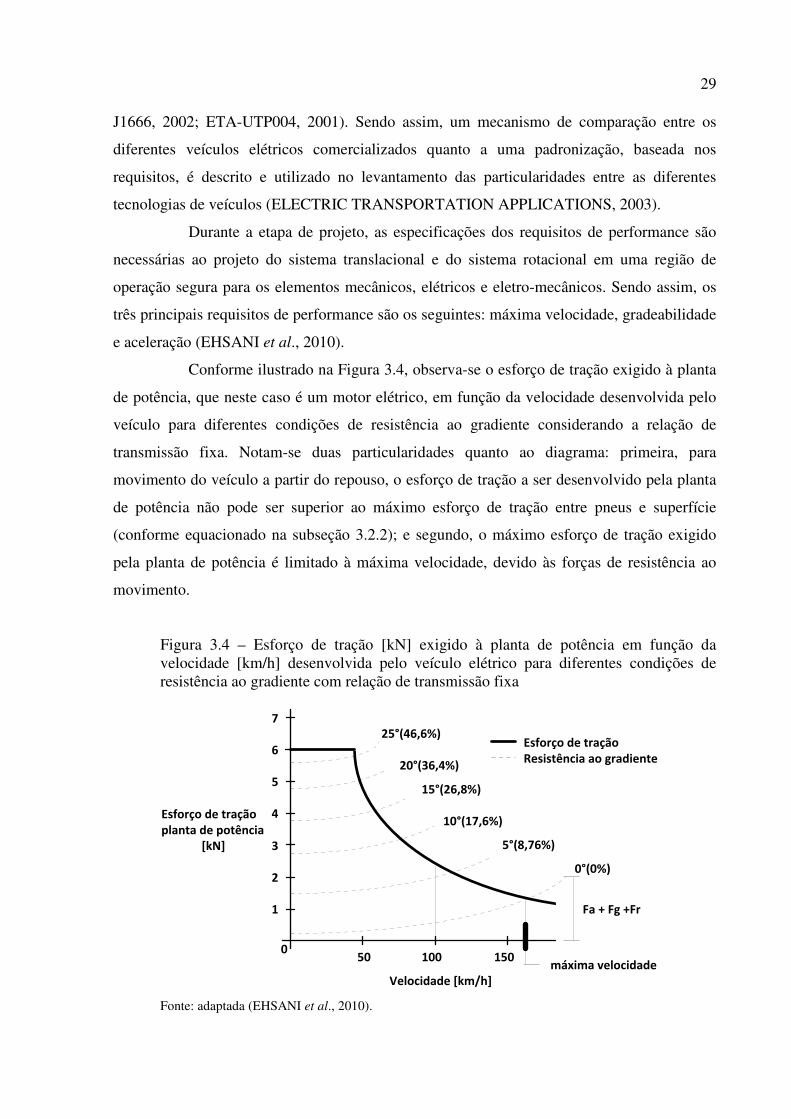
29 J1666, 2002; ETA-UTP004, 2001). Sendo assim, um mecanismo de comparação entre os
diferentes veículos elétricos comercializados quanto a uma padronização, baseada nos
requisitos, é descrito e utilizado no levantamento das particularidades entre as diferentes
tecnologias de veículos (ELECTRIC TRANSPORTATION APPLICATIONS, 2003).
Durante a etapa de projeto, as especificações dos requisitos de performance são
necessárias ao projeto do sistema translacional e do sistema rotacional em uma região de
operação segura para os elementos mecânicos, elétricos e eletro-mecânicos. Sendo assim, os
três principais requisitos de performance são os seguintes: máxima velocidade, gradeabilidade
e aceleração (EHSANI et al., 2010).
Conforme ilustrado na Figura 3.4, observa-se o esforço de tração exigido à planta
de potência, que neste caso é um motor elétrico, em função da velocidade desenvolvida pelo
veículo para diferentes condições de resistência ao gradiente considerando a relação de
transmissão fixa. Notam-se duas particularidades quanto ao diagrama: primeira, para
movimento do veículo a partir do repouso, o esforço de tração a ser desenvolvido pela planta
de potência não pode ser superior ao máximo esforço de tração entre pneus e superfície
(conforme equacionado na subseção 3.2.2); e segundo, o máximo esforço de tração exigido
pela planta de potência é limitado à máxima velocidade, devido às forças de resistência ao
movimento.
Figura 3.4 – Esforço de tração [kN] exigido à planta de potência em função da velocidade [km/h] desenvolvida pelo veículo elétrico para diferentes condições de resistência ao gradiente com relação de transmissão fixa
25°(46,6%)
20°(36,4%)
15°(26,8%)
10°(17,6%)
5°(8,76%)
0°(0%)
1000
50 150
3
2
1
7
6
5
4
Fa + Fg +Fr
máxima velocidade
Esforço de tração
Velocidade [km/h]
planta de potência
[kN]
Esforço de tração
Resistência ao gradiente
Fonte: adaptada (EHSANI et al., 2010).
30
“A máxima velocidade do veículo é definida como a velocidade constante de
cruzeiro que o mesmo pode desenvolver com a potência total do motor em uma estrada plana.”
(EHSANI et al., 2010, p 45, tradução nossa). De modo semelhante, observa-se na Figura 3.4 o
instante onde ocorre a equilíbrio entre o máximo esforço de tração exigido pela planta de
potência e as forças de resistência ao movimento, que é análogo a definição anterior e pode
ser verificado na Eq. (3.17), em função do torque exigido à planta de potência (Tp). +; · / · / · < · · - * 12 · · ! · · "#
(3.17)
O requisito gradeabilidade é definido como o ângulo gradiente, para o qual o
veículo possa desenvolver uma velocidade constante quando se deslocando em um plano
inclinado, respeitando assim o esforço de tração a ser desenvolvido pela planta de potência e o
esforço de tração entre pneus e superfície. Para pequenas inclinações, uma descrição
simplificada é observada na Eq. (3.18) que resulta no fator de performance (d); no entanto,
para grandes inclinações a Eq. (3.19) é utilizada.
- +; · / · / · < · 12 · · ! · · "# · %
(3.18)
/0 - · >1 # * #1 * #
(3.19)
O requisito aceleração é descrito como a variação da velocidade no tempo, desde
a condição de repouso até a velocidade de cruzeiro para pequenas inclinações ou em estrada
plana. A partir das Eqs. (3.1) e (3.18) a Eq. (3.20) é obtida. Observa-se na Eq. (3.21), que δ
considera o incremento da massa equivalente causado pelo momento angular dos
componentes em rotação, sendo o momento de inércia das rodas (jp) e momento de inércia
associado aos elementos da planta de potência (je).
$ · % ·
(3.20)
1 * ?; · # * /# · /# · ? · #
(3.21)
Uma alternativa quanto à determinação do δ, quando são desconhecidos os
momentos de inércia de todas as partes rotativas, é fazer uso da relação empírica apresentada
na Eq. (3.22), a qual se aplica aos veículos automotivos para transporte de passageiros, onde
as constantes 0,04 (δ1) e 0,0025 (δ2) representam o valor estimado para os termos da Eq. (3.21)
(EHSANI et al., 2010).
31 1 * @ * /# · /# · # (3.22)
Verificam-se nas Eqs. (3.23) e (3.24) a relação que permite determinar Tp em
função de Ft e a relação que permite determinar a velocidade de rotação da planta de potência
(Np) em função de Vc, respectivamente.
+; · / · / · < (3.23)
; 30 · C · / · /D · (3.24)
Em continuidade a Eq.(3.20), o tempo de aceleração (ta) e a distância percorrida
(Sa) desde uma velocidade inicial (v1) até uma velocidade final (v2) são descritos nas Eqs.
(3.25) e (3.26), respectivamente.
E F · +; · / · / · < · 12 · · ! · · #G · #@ (3.25)
H E F · +; · / · / · < · 12 · · ! · · #G · · #@
(3.26)
A partir dos requisitos de performance discutidos, as especificações para o sistema
translacional devem estar em conformidade com a fundamentação teórica descrita na
subseção 3.2.2. Sendo assim, as especificações para o sistema rotacional tratam do estudo das
características de operação da planta de potência e do sistema de transmissão, de modo a estar
em sintonia com os requisitos de performance.
Como verificado na Figura 3.4, o esforço de tração exigido à planta de potência
varia hiperbolicamente com o aumento da velocidade desenvolvida, de modo que a potência
consumida pela máquina elétrica possa ser manipulada em conformidade a um dado ponto de
operação em função das forças resistentes.
Dependendo do esforço de tração requisitado à planta de potência, a característica
torque/velocidade da máquina elétrica deve estar em compatibilidade com a característica de
torque aplicado ao eixo das rodas e com a velocidade desenvolvida pelo veículo, para tanto o
sistema de transmissão deve condicionar esta compatibilidade em função da relação de
transmissão utilizada. Verifica-se que em automóveis do tipo BEV, uma relação de
transmissão fixa é preferível, visto que a região de operação da máquina elétrica (curva de
torque/velocidade) e suas características eletro-mecânica possam ser mais bem utilizadas em
conformidade o regime de operação do veículo (EHSANI et al., 2010).
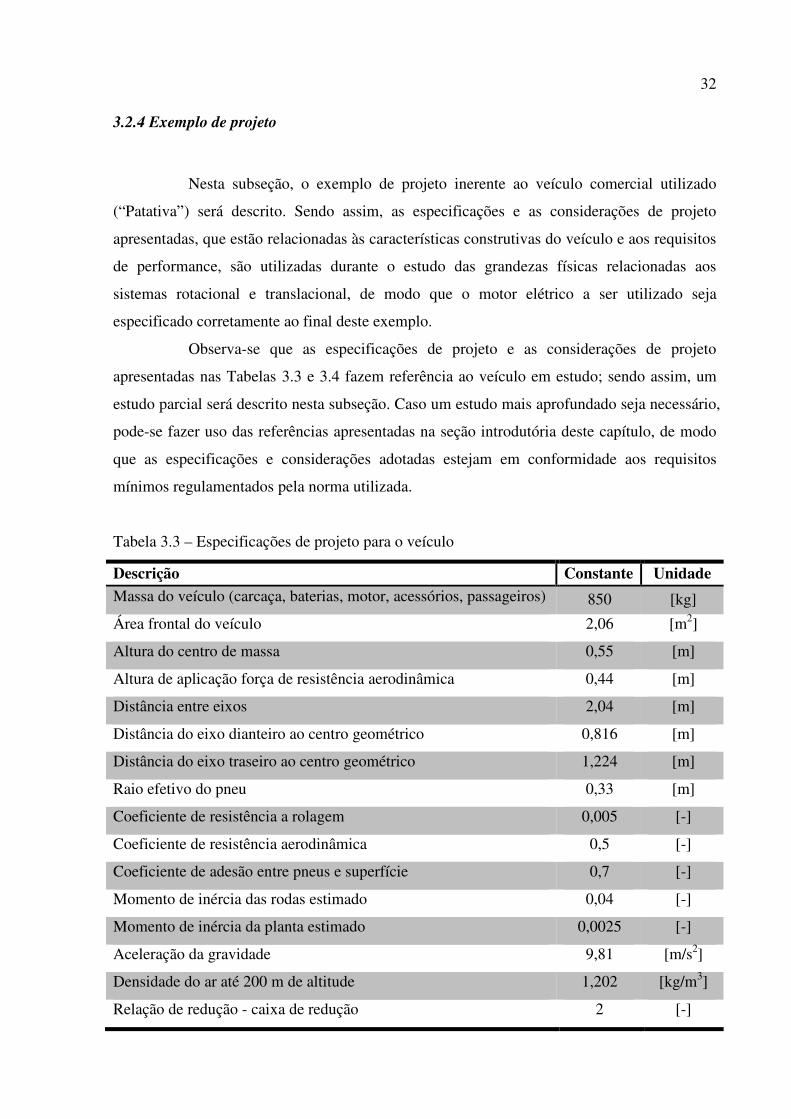
32 3.2.4 Exemplo de projeto
Nesta subseção, o exemplo de projeto inerente ao veículo comercial utilizado
(“Patativa”) será descrito. Sendo assim, as especificações e as considerações de projeto
apresentadas, que estão relacionadas às características construtivas do veículo e aos requisitos
de performance, são utilizadas durante o estudo das grandezas físicas relacionadas aos
sistemas rotacional e translacional, de modo que o motor elétrico a ser utilizado seja
especificado corretamente ao final deste exemplo.
Observa-se que as especificações de projeto e as considerações de projeto
apresentadas nas Tabelas 3.3 e 3.4 fazem referência ao veículo em estudo; sendo assim, um
estudo parcial será descrito nesta subseção. Caso um estudo mais aprofundado seja necessário,
pode-se fazer uso das referências apresentadas na seção introdutória deste capítulo, de modo
que as especificações e considerações adotadas estejam em conformidade aos requisitos
mínimos regulamentados pela norma utilizada.
Tabela 3.3 – Especificações de projeto para o veículo
Descrição Constante Unidade Massa do veículo (carcaça, baterias, motor, acessórios, passageiros) 850 [kg]
Área frontal do veículo 2,06 [m2]
Altura do centro de massa 0,55 [m]
Altura de aplicação força de resistência aerodinâmica 0,44 [m]
Distância entre eixos 2,04 [m]
Distância do eixo dianteiro ao centro geométrico 0,816 [m]
Distância do eixo traseiro ao centro geométrico 1,224 [m]
Raio efetivo do pneu 0,33 [m]
Coeficiente de resistência a rolagem 0,005 [-]
Coeficiente de resistência aerodinâmica 0,5 [-]
Coeficiente de adesão entre pneus e superfície 0,7 [-]
Momento de inércia das rodas estimado 0,04 [-]
Momento de inércia da planta estimado 0,0025 [-]
Aceleração da gravidade 9,81 [m/s2]
Densidade do ar até 200 m de altitude 1,202 [kg/m3]
Relação de redução - caixa de redução 2 [-]
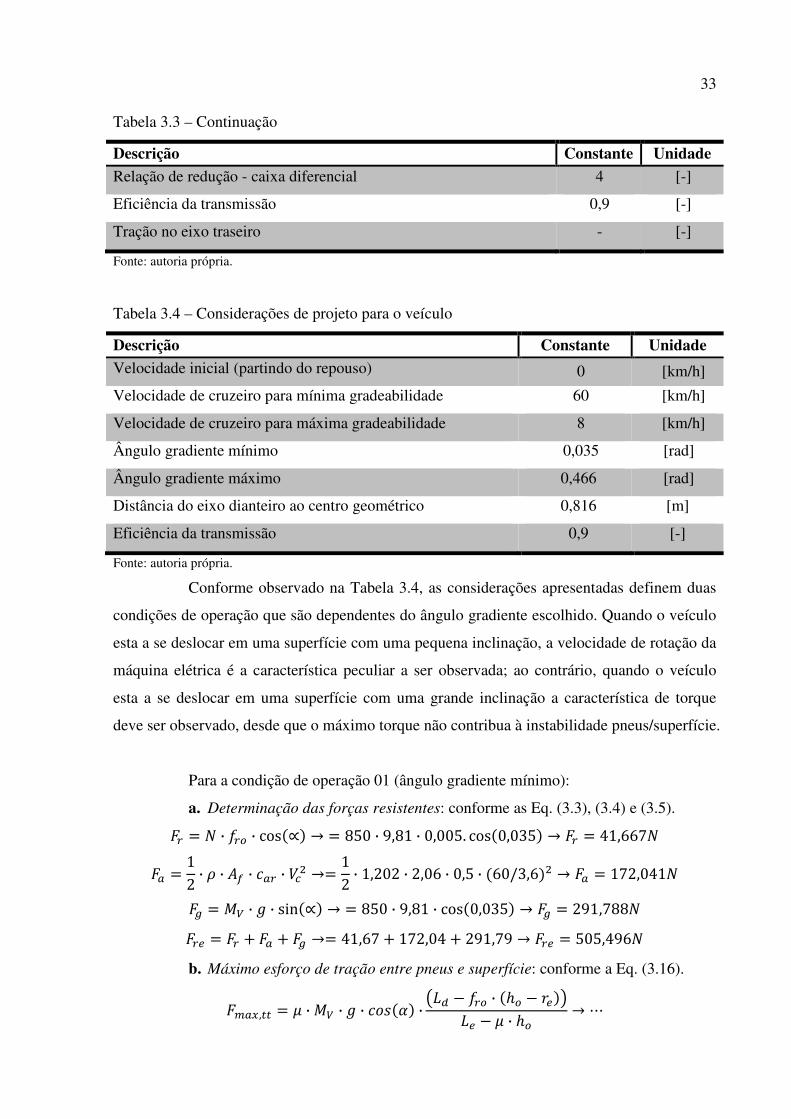
33 Tabela 3.3 – Continuação
Descrição Constante Unidade
Relação de redução - caixa diferencial 4 [-]
Eficiência da transmissão 0,9 [-]
Tração no eixo traseiro - [-]
Fonte: autoria própria.
Tabela 3.4 – Considerações de projeto para o veículo
Descrição Constante Unidade
Velocidade inicial (partindo do repouso) 0 [km/h]
Velocidade de cruzeiro para mínima gradeabilidade 60 [km/h]
Velocidade de cruzeiro para máxima gradeabilidade 8 [km/h]
Ângulo gradiente mínimo 0,035 [rad]
Ângulo gradiente máximo 0,466 [rad]
Distância do eixo dianteiro ao centro geométrico 0,816 [m]
Eficiência da transmissão 0,9 [-]
Fonte: autoria própria.
Conforme observado na Tabela 3.4, as considerações apresentadas definem duas
condições de operação que são dependentes do ângulo gradiente escolhido. Quando o veículo
esta a se deslocar em uma superfície com uma pequena inclinação, a velocidade de rotação da
máquina elétrica é a característica peculiar a ser observada; ao contrário, quando o veículo
esta a se deslocar em uma superfície com uma grande inclinação a característica de torque
deve ser observado, desde que o máximo torque não contribua à instabilidade pneus/superfície.
Para a condição de operação 01 (ângulo gradiente mínimo):
a. Determinação das forças resistentes: conforme as Eq. (3.3), (3.4) e (3.5). · · cos K 850 · 9,81 · 0,005. cos0,035 K 41,667
12 · · ! · · "# K 12 · 1,202 · 2,06 · 0,5 · 60/3,6# K 172,041 $ · % · sin K 850 · 9,81 · cos0,035 K $ 291,788 * * $ K 41,67 * 172,04 * 291,79 K 505,496
b. Máximo esforço de tração entre pneus e superfície: conforme a Eq. (3.16).
34, 6 · · % · - · 9,) · . :, 6 · . K T
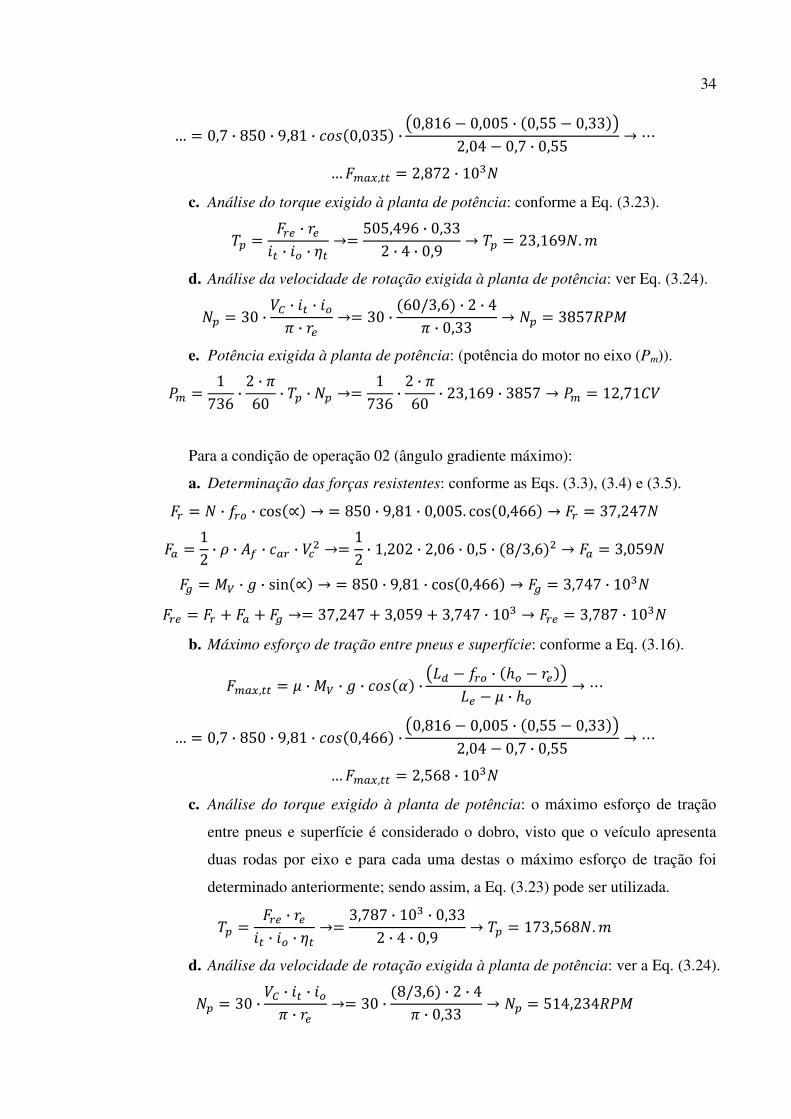
34 … 0,7 · 850 · 9,81 · 0,035 · 90,816 0,005 · 0,55 0,33:2,04 0,7 · 0,55 K T
…34, 2,872 · 10V
c. Análise do torque exigido à planta de potência: conforme a Eq. (3.23).
+; · / · / · < K 505,496 · 0,332 · 4 · 0,9 K +; 23,169.W
d. Análise da velocidade de rotação exigida à planta de potência: ver Eq. (3.24).
; 30 · C · / · /D · K 30 · 60/3,6 · 2 · 4D · 0,33 K ; 3857XY
e. Potência exigida à planta de potência: (potência do motor no eixo (Pm)).
Y3 1736 · 2 · D60 · +; · ; K 1736 · 2 · D60 · 23,169 · 3857 K Y3 12,71Z
Para a condição de operação 02 (ângulo gradiente máximo):
a. Determinação das forças resistentes: conforme as Eqs. (3.3), (3.4) e (3.5). · · cos K 850 · 9,81 · 0,005. cos0,466 K 37,247
12 · · ! · · "# K 12 · 1,202 · 2,06 · 0,5 · 8/3,6# K 3,059 $ · % · sin K 850 · 9,81 · cos0,466 K $ 3,747 · 10V * * $ K 37,247 * 3,059 * 3,747 · 10V K 3,787 · 10V
b. Máximo esforço de tração entre pneus e superfície: conforme a Eq. (3.16).
34, 6 · · % · - · 9,) · . :, 6 · . K T
… 0,7 · 850 · 9,81 · 0,466 · 90,816 0,005 · 0,55 0,33:2,04 0,7 · 0,55 K T
…34, 2,568 · 10V
c. Análise do torque exigido à planta de potência: o máximo esforço de tração
entre pneus e superfície é considerado o dobro, visto que o veículo apresenta
duas rodas por eixo e para cada uma destas o máximo esforço de tração foi
determinado anteriormente; sendo assim, a Eq. (3.23) pode ser utilizada.
+; · / · / · < K 3,787 · 10V · 0,332 · 4 · 0,9 K +; 173,568.W
d. Análise da velocidade de rotação exigida à planta de potência: ver a Eq. (3.24).
; 30 · C · / · /D · K 30 · 8/3,6 · 2 · 4D · 0,33 K ; 514,234XY
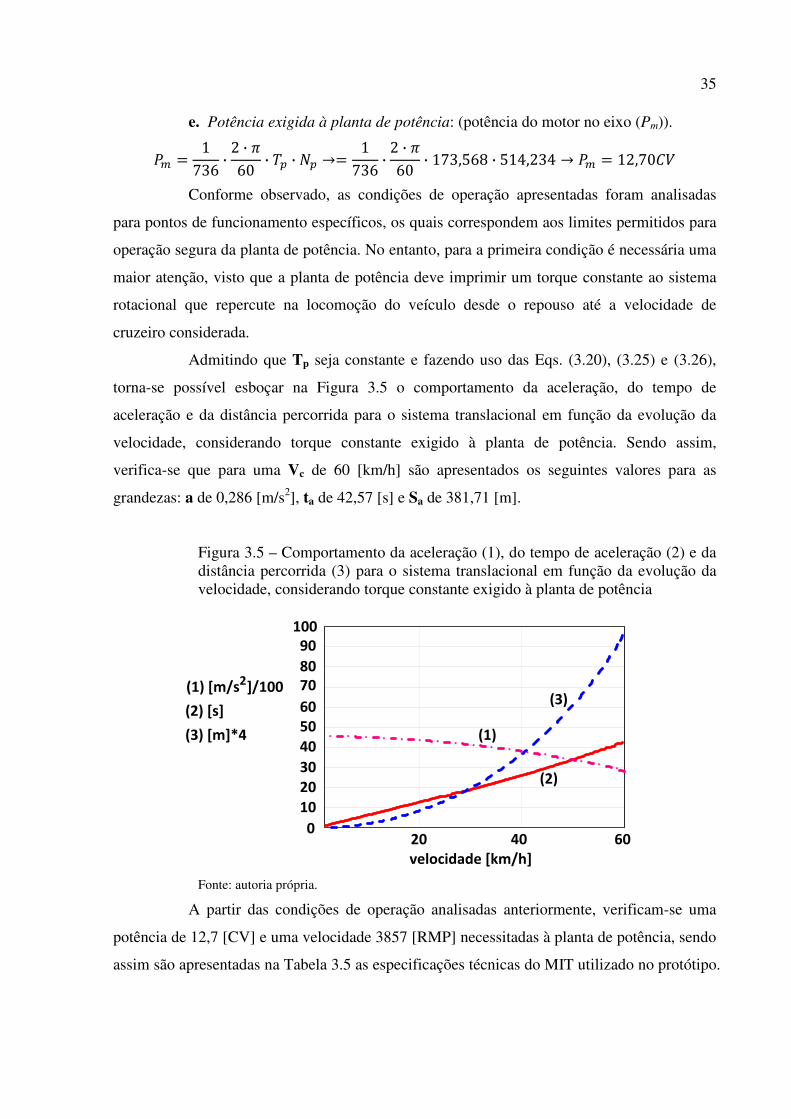
35
e. Potência exigida à planta de potência: (potência do motor no eixo (Pm)).
Y3 1736 · 2 · D60 · +; · ; K 1736 · 2 · D60 · 173,568 · 514,234 K Y3 12,70Z
Conforme observado, as condições de operação apresentadas foram analisadas
para pontos de funcionamento específicos, os quais correspondem aos limites permitidos para
operação segura da planta de potência. No entanto, para a primeira condição é necessária uma
maior atenção, visto que a planta de potência deve imprimir um torque constante ao sistema
rotacional que repercute na locomoção do veículo desde o repouso até a velocidade de
cruzeiro considerada.
Admitindo que Tp seja constante e fazendo uso das Eqs. (3.20), (3.25) e (3.26),
torna-se possível esboçar na Figura 3.5 o comportamento da aceleração, do tempo de
aceleração e da distância percorrida para o sistema translacional em função da evolução da
velocidade, considerando torque constante exigido à planta de potência. Sendo assim,
verifica-se que para uma Vc de 60 [km/h] são apresentados os seguintes valores para as
grandezas: a de 0,286 [m/s2], ta de 42,57 [s] e Sa de 381,71 [m].
Figura 3.5 – Comportamento da aceleração (1), do tempo de aceleração (2) e da distância percorrida (3) para o sistema translacional em função da evolução da velocidade, considerando torque constante exigido à planta de potência
velocidade [km/h]
100
90
80
70
60
50
40
30
20
10
020 40 60
(2)
(3)
(1)
(1) [m/s ]/100
(2) [s]
(3) [m]*4
2
Fonte: autoria própria.
A partir das condições de operação analisadas anteriormente, verificam-se uma
potência de 12,7 [CV] e uma velocidade 3857 [RMP] necessitadas à planta de potência, sendo
assim são apresentadas na Tabela 3.5 as especificações técnicas do MIT utilizado no protótipo.
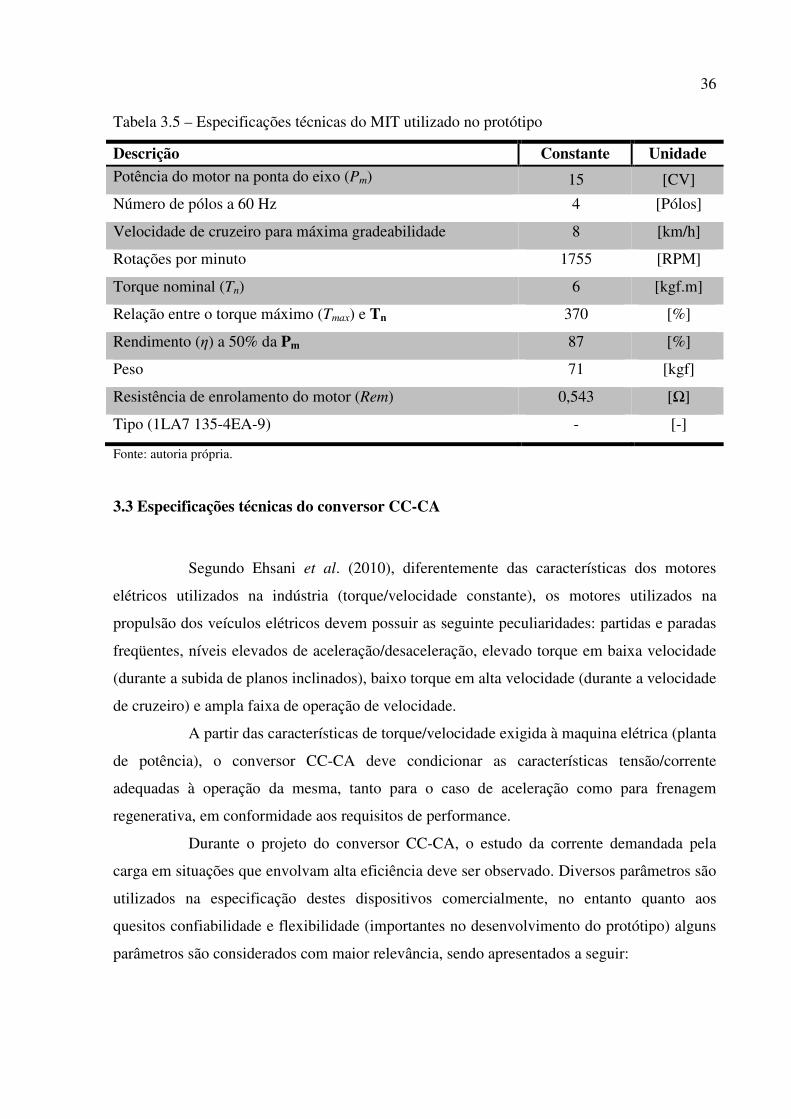
36 Tabela 3.5 – Especificações técnicas do MIT utilizado no protótipo
Descrição Constante Unidade
Potência do motor na ponta do eixo (Pm) 15 [CV]
Número de pólos a 60 Hz 4 [Pólos]
Velocidade de cruzeiro para máxima gradeabilidade 8 [km/h]
Rotações por minuto 1755 [RPM]
Torque nominal (Tn) 6 [kgf.m]
Relação entre o torque máximo (Tmax) e Tn 370 [%]
Rendimento (η) a 50% da Pm 87 [%]
Peso 71 [kgf]
Resistência de enrolamento do motor (Rem) 0,543 [Ω]
Tipo (1LA7 135-4EA-9) - [-]
Fonte: autoria própria.
3.3 Especificações técnicas do conversor CC-CA
Segundo Ehsani et al. (2010), diferentemente das características dos motores
elétricos utilizados na indústria (torque/velocidade constante), os motores utilizados na
propulsão dos veículos elétricos devem possuir as seguinte peculiaridades: partidas e paradas
freqüentes, níveis elevados de aceleração/desaceleração, elevado torque em baixa velocidade
(durante a subida de planos inclinados), baixo torque em alta velocidade (durante a velocidade
de cruzeiro) e ampla faixa de operação de velocidade.
A partir das características de torque/velocidade exigida à maquina elétrica (planta
de potência), o conversor CC-CA deve condicionar as características tensão/corrente
adequadas à operação da mesma, tanto para o caso de aceleração como para frenagem
regenerativa, em conformidade aos requisitos de performance.
Durante o projeto do conversor CC-CA, o estudo da corrente demandada pela
carga em situações que envolvam alta eficiência deve ser observado. Diversos parâmetros são
utilizados na especificação destes dispositivos comercialmente, no entanto quanto aos
quesitos confiabilidade e flexibilidade (importantes no desenvolvimento do protótipo) alguns
parâmetros são considerados com maior relevância, sendo apresentados a seguir:
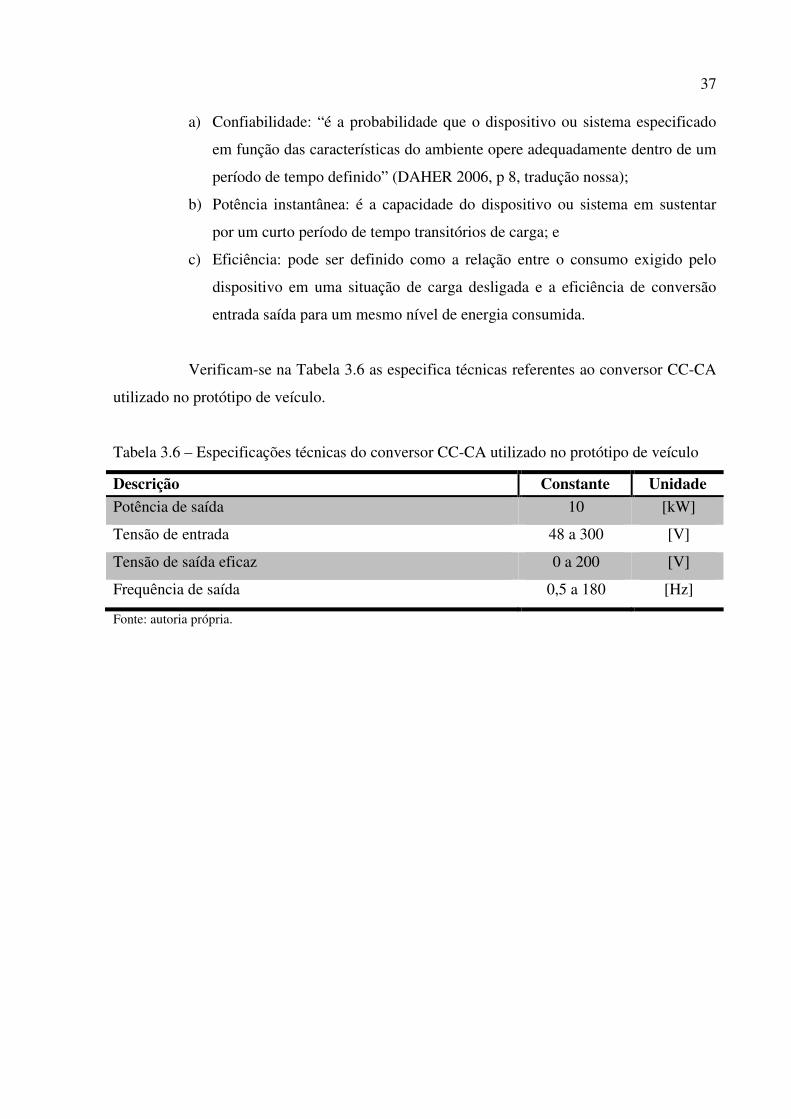
37
a) Confiabilidade: “é a probabilidade que o dispositivo ou sistema especificado
em função das características do ambiente opere adequadamente dentro de um
período de tempo definido” (DAHER 2006, p 8, tradução nossa);
b) Potência instantânea: é a capacidade do dispositivo ou sistema em sustentar
por um curto período de tempo transitórios de carga; e
c) Eficiência: pode ser definido como a relação entre o consumo exigido pelo
dispositivo em uma situação de carga desligada e a eficiência de conversão
entrada saída para um mesmo nível de energia consumida.
Verificam-se na Tabela 3.6 as especifica técnicas referentes ao conversor CC-CA
utilizado no protótipo de veículo.
Tabela 3.6 – Especificações técnicas do conversor CC-CA utilizado no protótipo de veículo
Descrição Constante Unidade
Potência de saída 10 [kW]
Tensão de entrada 48 a 300 [V]
Tensão de saída eficaz 0 a 200 [V]
Frequência de saída 0,5 a 180 [Hz]
Fonte: autoria própria.
38 CAPÍTULO 4 – ANÁLISES QUALITATIVA E QUANTITATIVA, E EXEMPLO DE PROJETO DA TOPOLOGIA BOOST BIDIRECIONAL
Neste quarto capítulo, uma fundamentação teórica sobre a topologia de conversor
estático CC-CC não isolado BOOST bidirecional é apresentada. São tratados em seqüência:
introdução, análise qualitativa, análise quantitativa e exemplo de projeto.
4.1 Introdução
Uma topologia básica de conversor estático CC-CC pode ser definida como uma
representação simplificada e equivalente, a qual é capaz de conservar as mesmas
funcionalidades de um circuito conversor de potência em uma região de operação.
Em função da fundamentação teórica apresentada nos capítulos anteriores,
propõe-se neste capítulo desenvolver um estudo complementar, cujo conteúdo explanado
repercute no contexto da pesquisa e no desenvolvimento dos capítulos seguintes.
Devido à infinidade de material publicado, a fundamentação teórica relacionada às
topologias de conversor estático CC-CC básico não isolado BUCK, BOOST e BUCK-
BOOST, também conhecidas como topologias clássicas de conversores diretos, está bastante
consolidada e difundida. Em função disto, as referências citadas a seguir são utilizadas na
elaboração deste capítulo (KAZIMIERCZUK, 2008; BARBI; MARTINS, 2008; ERICKSON;
MAKSIMOVIC, 2003).
Conforme observado na Figura 4.1, nota-se uma representação simplificada do
módulo de potência quanto ao sentido do fluxo de energia: (a) direto e (b) inverso. Observa-se
que a topologia de conversor estático CC-CC não isolado BOOST bidirecional é a estrutura
intermediária entre o banco de baterias e o inversor trifásico, bem como é a responsável pelo
modo de operação do módulo de potência; quando operando no modo BOOST, o sentido
direto de transferência de energia é observado em situações onde a máquina elétrica realiza
trabalho (aceleração); já no modo BUCK, o sentido inverso de transferência de energia é
observado em situações onde a máquina elétrica sofre trabalho (frenagem regenerativa).
O título verificado neste capítulo tem por objetivo apresentar um estudo
detalhado para a topologia de conversor estático CC-CC não isolado adotada, em
conformidade a Figura 4.1 e fundamentado nas referências citadas anteriormente.
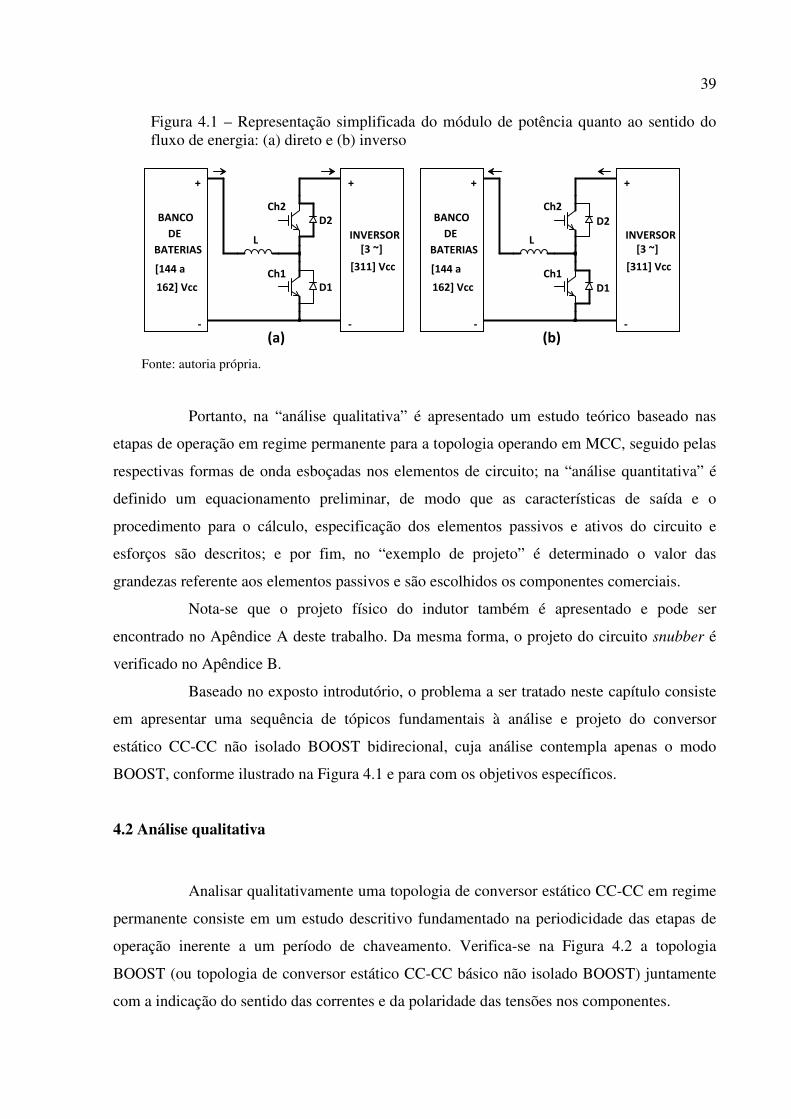
39
Figura 4.1 – Representação simplificada do módulo de potência quanto ao sentido do fluxo de energia: (a) direto e (b) inverso
Ch1
Ch2
L INVERSOR
[311] Vcc
+
-
BANCO
DE
BATERIAS
[144 a
162] Vcc
+
-
[3 ~]
Ch1
Ch2
L INVERSOR
[311] Vcc
+
-
BANCO
DE
BATERIAS
[144 a
162] Vcc
+
-
[3 ~]
(a) (b)
D2
D1
D2
D1
Fonte: autoria própria.
Portanto, na “análise qualitativa” é apresentado um estudo teórico baseado nas
etapas de operação em regime permanente para a topologia operando em MCC, seguido pelas
respectivas formas de onda esboçadas nos elementos de circuito; na “análise quantitativa” é
definido um equacionamento preliminar, de modo que as características de saída e o
procedimento para o cálculo, especificação dos elementos passivos e ativos do circuito e
esforços são descritos; e por fim, no “exemplo de projeto” é determinado o valor das
grandezas referente aos elementos passivos e são escolhidos os componentes comerciais.
Nota-se que o projeto físico do indutor também é apresentado e pode ser
encontrado no Apêndice A deste trabalho. Da mesma forma, o projeto do circuito snubber é
verificado no Apêndice B.
Baseado no exposto introdutório, o problema a ser tratado neste capítulo consiste
em apresentar uma sequência de tópicos fundamentais à análise e projeto do conversor
estático CC-CC não isolado BOOST bidirecional, cuja análise contempla apenas o modo
BOOST, conforme ilustrado na Figura 4.1 e para com os objetivos específicos.
4.2 Análise qualitativa
Analisar qualitativamente uma topologia de conversor estático CC-CC em regime
permanente consiste em um estudo descritivo fundamentado na periodicidade das etapas de
operação inerente a um período de chaveamento. Verifica-se na Figura 4.2 a topologia
BOOST (ou topologia de conversor estático CC-CC básico não isolado BOOST) juntamente
com a indicação do sentido das correntes e da polaridade das tensões nos componentes.
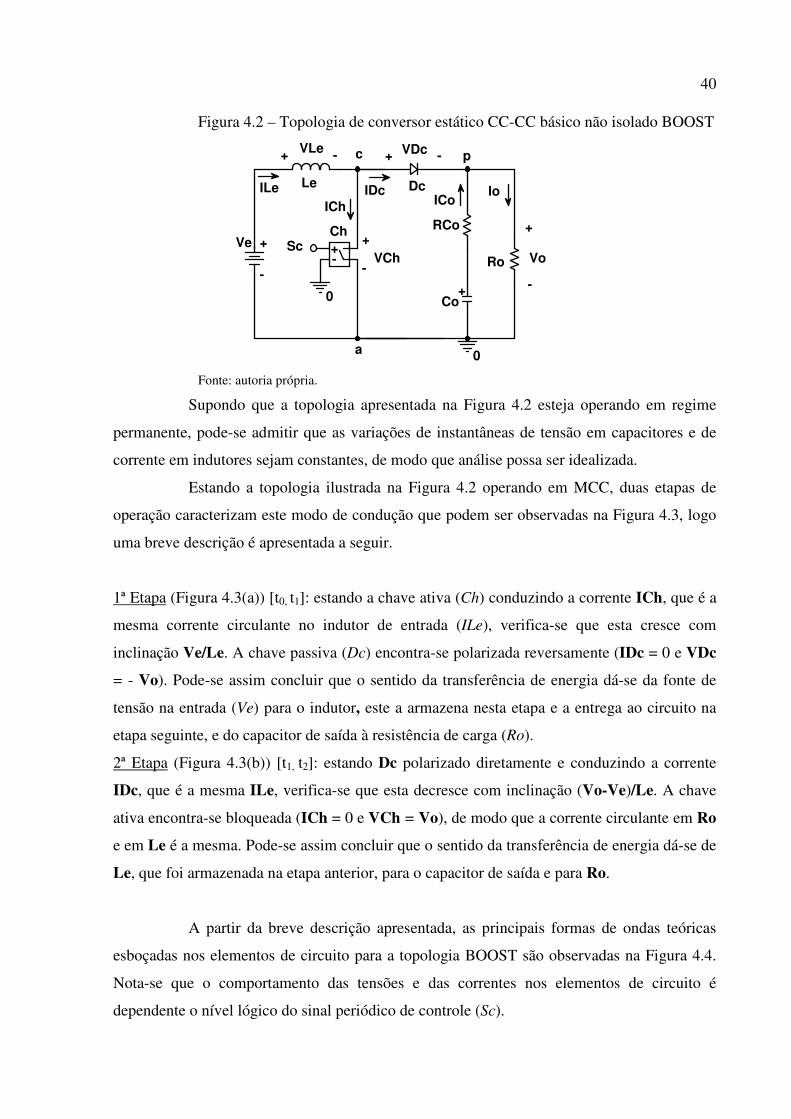
40
Figura 4.2 – Topologia de conversor estático CC-CC básico não isolado BOOST
Le
+
-
+
-
Ch
Dc
0
Sc
Co
RCo
Ro
Ve +
-
+ -
ILe
VLe
ICh
+ -VDc
IDcICo
Io
+
-
Vo
+
0
VCh
c p
a
Fonte: autoria própria.
Supondo que a topologia apresentada na Figura 4.2 esteja operando em regime
permanente, pode-se admitir que as variações de instantâneas de tensão em capacitores e de
corrente em indutores sejam constantes, de modo que análise possa ser idealizada.
Estando a topologia ilustrada na Figura 4.2 operando em MCC, duas etapas de
operação caracterizam este modo de condução que podem ser observadas na Figura 4.3, logo
uma breve descrição é apresentada a seguir.
1ª Etapa (Figura 4.3(a)) [t0, t1]: estando a chave ativa (Ch) conduzindo a corrente ICh, que é a
mesma corrente circulante no indutor de entrada (ILe), verifica-se que esta cresce com
inclinação Ve/Le. A chave passiva (Dc) encontra-se polarizada reversamente (IDc = 0 e VDc
= - Vo). Pode-se assim concluir que o sentido da transferência de energia dá-se da fonte de
tensão na entrada (Ve) para o indutor, este a armazena nesta etapa e a entrega ao circuito na
etapa seguinte, e do capacitor de saída à resistência de carga (Ro).
2ª Etapa (Figura 4.3(b)) [t1, t2]: estando Dc polarizado diretamente e conduzindo a corrente
IDc, que é a mesma ILe, verifica-se que esta decresce com inclinação (Vo-Ve)/Le. A chave
ativa encontra-se bloqueada (ICh = 0 e VCh = Vo), de modo que a corrente circulante em Ro
e em Le é a mesma. Pode-se assim concluir que o sentido da transferência de energia dá-se de
Le, que foi armazenada na etapa anterior, para o capacitor de saída e para Ro.
A partir da breve descrição apresentada, as principais formas de ondas teóricas
esboçadas nos elementos de circuito para a topologia BOOST são observadas na Figura 4.4.
Nota-se que o comportamento das tensões e das correntes nos elementos de circuito é
dependente o nível lógico do sinal periódico de controle (Sc).
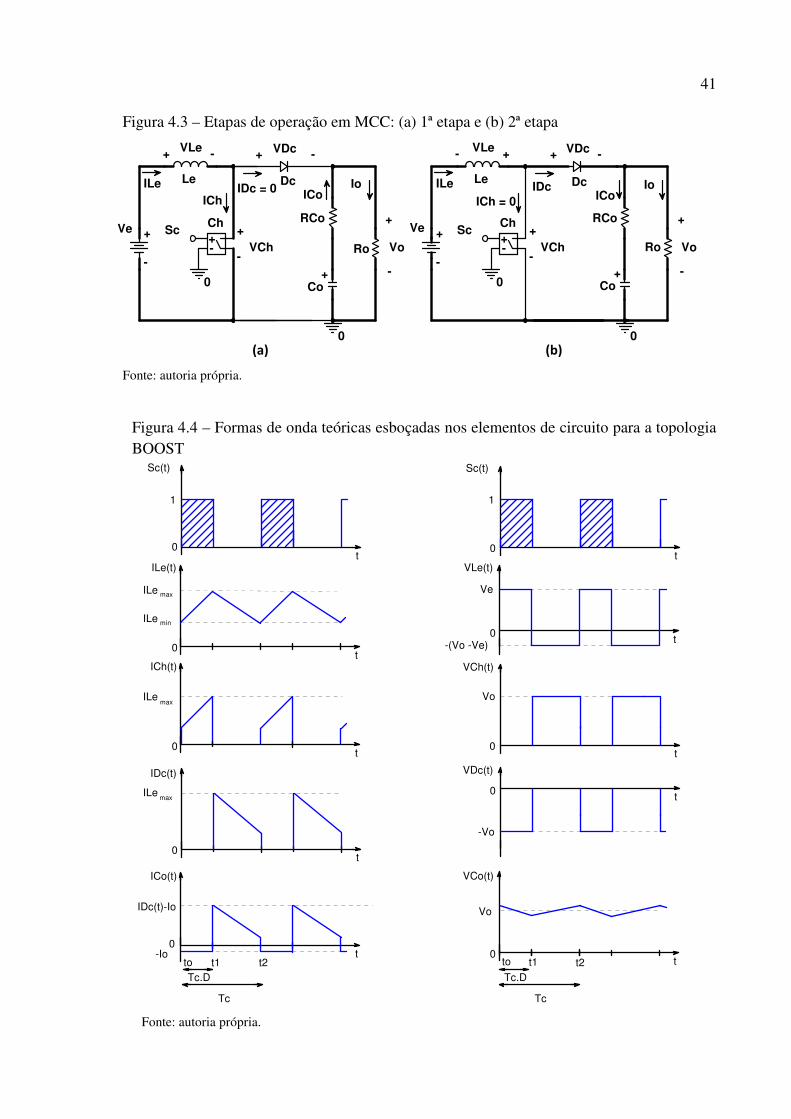
41
Figura 4.3 – Etapas de operação em MCC: (a) 1ª etapa e (b) 2ª etapa
Le
+
-
+
-
Ch
Dc
0
Sc
Co
RCo
Ro
Ve +
-
+ -
ILe
VLe
ICh
+ -VDc
IDc = 0ICo
Io
+
-
Vo
+
0
Le
+
-
+
-
Ch
Dc
0
Sc
Co
RCo
Ro
Ve +
-
- +
ILe
VLe
ICh = 0
+ -VDc
IDcICo
Io
+
-
Vo
+
0(b)(a)
VCh VCh
Fonte: autoria própria.
Figura 4.4 – Formas de onda teóricas esboçadas nos elementos de circuito para a topologia BOOST
0
0
Sc(t)
1
0
Sc(t)
1
ILe(t)
ILe max
t1 t20
0
ICo(t)
-Io
IDc(t)-Io
VCo(t)
0
VLe(t)
-(Vo -Ve)
Ve
0
VCh(t)
VDc(t)
t1
0
Vo
-Vo
t
t t
tt
t
t
t
0
ICh(t)
ILemax
t
0
IDc(t)
t
ILemax
ILe min
Tc.D
Tc
Vo
t2
Tc.D
Tc
to to
Fonte: autoria própria.
42 4.3 Análise quantitativa
Analisar quantitativamente uma topologia de conversor estático CC-CC em
regime permanente consiste em um estudo analítico fundamentado na periodicidade das
etapas de operação inerentes a um período de chaveamento. Fazendo uso da análise
qualitativa descrita, o equacionamento preliminar e as características de saída do conversor
são apresentados. Sendo assim, as equações necessárias ao dimensionamento e a
especificação dos elementos passivos e ativos do circuito, juntamente com a análise dos
esforços, são obtidos para MCC apenas.
4.3.1 Equações preliminares
A partir das etapas de operação verificadas na seção anterior, a análise algébrica
aqui apresenta descreve as expressões que governam o comportamento da tensão e o da
corrente nos elementos de circuito da Figura 4.2 em um período de chaveamento.
A corrente em Le verificada na Eq. (4.1), da mesma forma a razão cíclica (D) é
definida na Eq. (4.2).
ILet _,`0 * `,` · , a b c d @_,`@ `,` · @ , a @ c d # (4.1)
D t@ tbTc (4.2)
Reescrevendo a Eq. (4.1) em função da Eq. (4.2), a Eq. (4.3) é obtida em um
instante qualquer, fazendo t0 = 0, t1 = D.Tc e t2 = Tc.
ILet _,`3gh * `,` · , a 0 c d i · +_,`34 `,` · i · + , a i · + c d + (4.3)
É tratado na Eq. (4.3) o comportamento da corrente em Le. A primeira etapa é
caracterizada pelo armazenamento de energia em Le, visto que Ve é aplicada diretamente à
Le, nota-se que a corrente de entrada cresce com inclinação (Ve/Le) a partir de uma corrente
mínima (ILemin) até uma corrente máxima (ILemax), alcançada ao final da etapa. A segunda
etapa é caracterizada pelo repasse de energia armazenada anteriormente em Le para Co e a
corrente de entrada decresce com inclinação (Vo-Ve)/Le a partir de ILemax até ILemin.
43
Conforme a Eq. (4.4), as tensões Ve e (-Ve + Vo) são aplicadas em Le na
primeira e na segunda etapa, respectivamente.
VLet ` , a 0 c d i · + ` , a i · + c d + (4.4)
São verificados nas Eqs. (4.5) e (4.6) o comportamento da corrente e o da tensão
imposto à Ch. Durante a primeira etapa, a tensão aplicada é zero, bem como a corrente
circulante é a ILe. Durante a segunda etapa, a tensão aplicada é Vo e (ICh = 0).
ICht _,`3gh * `,` · , a 0 c d i · + 0 , a i · + c d + (4.5)
VCht 0 , a 0 c d i · + Vo , a i · + c d + (4.6)
Notam-se nas Eqs. (4.7) e (4.8) o comportamento da corrente e o da tensão
imposto à Dc. Durante a primeira etapa, a tensão aplicada é (–Vo), bem como a corrente
circulante é zero. Durante a segunda etapa, a tensão aplicada é zero e (IDc = ILe).
IDct 0 , a 0 c d i · +_,`34 `,` · i · + , a i · + c d + (4.7)
VDct , a 0 c d i · + 0 , a i · + c d + (4.8)
São descritos nas Eqs. (4.9) e (4.10) o comportamento da corrente e o
comportamento da tensão em Co. Verifica-se que o período de carga no capacitor ocorre
somente na 2ª etapa de operação. Para a Eq. (4.9), no início da 2ª etapa uma corrente (IDc –Io)
é exigida por Co, de modo que ao final desta etapa uma corrente de carga constante (Io) é
suprida pelo capacitor. Para a Eq. (4.10), a tensão apresenta uma ondulação característica, que
pode ser aproximada por uma onda triangular.
ICo _ , a 0 c d i · + _i _ , a i · + c d + (4.9)
VCot 34 _Z · , a 0 c d i · +3gh * _i _Z · i · + , a i · + c d + (4.10)
4.3.2 Características de saída
Estando a topologia apresentada na Figura 4.2 operando em regime permanente,
as características de saída em função do modo de operação (MCC ou MCD) são determinadas.
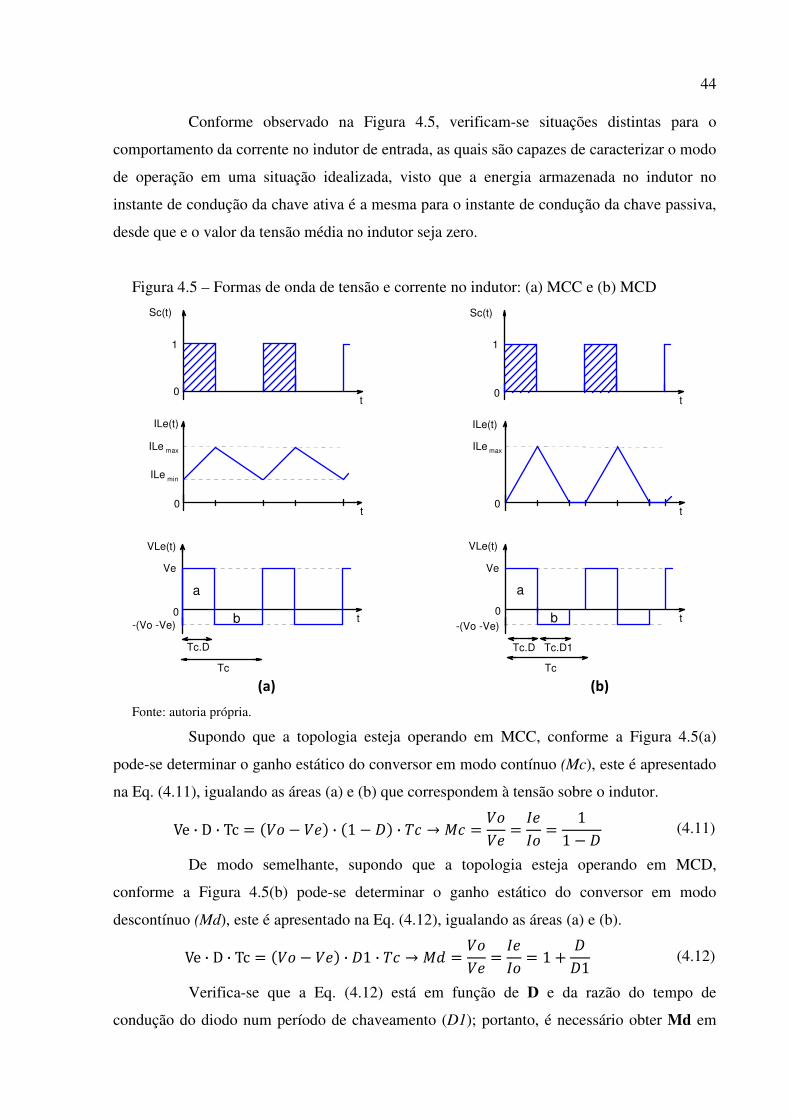
44
Conforme observado na Figura 4.5, verificam-se situações distintas para o
comportamento da corrente no indutor de entrada, as quais são capazes de caracterizar o modo
de operação em uma situação idealizada, visto que a energia armazenada no indutor no
instante de condução da chave ativa é a mesma para o instante de condução da chave passiva,
desde que e o valor da tensão média no indutor seja zero.
Figura 4.5 – Formas de onda de tensão e corrente no indutor: (a) MCC e (b) MCD
0
0
Sc(t)
1
0
Sc(t)
1
ILe(t)
ILe max
0
VLe(t)
-(Vo -Ve)
Ve
t
t t
t
ILemin
Tc.D
Tc
0
ILe(t)
ILe max
0
VLe(t)
-(Vo -Ve)
Ve
t
t
Tc.D Tc.D1
Tc
(a) (b)
a
b
a
b
Fonte: autoria própria.
Supondo que a topologia esteja operando em MCC, conforme a Figura 4.5(a)
pode-se determinar o ganho estático do conversor em modo contínuo (Mc), este é apresentado
na Eq. (4.11), igualando as áreas (a) e (b) que correspondem à tensão sobre o indutor.
Ve · D · Tc ` · 1 i · + K ` _`_ 11 i (4.11)
De modo semelhante, supondo que a topologia esteja operando em MCD,
conforme a Figura 4.5(b) pode-se determinar o ganho estático do conversor em modo
descontínuo (Md), este é apresentado na Eq. (4.12), igualando as áreas (a) e (b).
Ve · D · Tc ` · i1 · + K ` _`_ 1 * ii1 (4.12)
Verifica-se que a Eq. (4.12) está em função de D e da razão do tempo de
condução do diodo num período de chaveamento (D1); portanto, é necessário obter Md em
45 função de D apenas, para tanto uma metodologia alternativa é utilizada. Na Figura 4.5(b),
observa-se que a ondulação de corrente no indutor de entrada (∆ILe) é obtida no instante de
condução da chave ativa juntamente com a Eq. (4.12), conforme a Eq. (4.13). Na Eq. (4.14)
obtém-se Ie e na Eq. (4.15) determina-se a relação para Io que foi obtida a partir das Eqs.
(4.12) e (4.14). Finalmente, uma expressão equivalente à Eq. (4.12) é verificada na Eq. (4.16).
∆_,` ` · i · +,` K ∆_,` · i · ,` · (4.13)
_` 1+E _,` · i * i12 ·n"b ∆_,` K _` · i#2 · · ,` · 1 (4.14)
_ _ K _ · i#2 · · ,` · · 1 (4.15)
i o2 · · ,` · _ · · 1 K i o2 · · ,` · · 1X (4.16)
Definido o parâmetro de condução do conversor (Ka) na Eq. (4.17), verifica-se
que a Eq. (4.16) também pode ser reescrita conforme a Eq. (4.18).
p 2 · · ,`X (4.17)
` 1 * q1 * 4 · i#p2 (4.18)
Para que a topologia opere em MCD, é necessário que a soma dos períodos de
condução da chave ativa e da chave passiva, Eq. (4.19), seja inferior ao período de
chaveamento. A partir das Eqs. (4.12) e (4.19) obtém-se a Eq. (4.20). + r i · + * i1 · + (4.19)
i c 1 (4.20)
O parâmetro de condução crítico (Ka_cr), obtido a partir das Eqs. (4.16), (4.17) e
(4.20), é apresentado na Eq. (4.21). Este parâmetro trata do ponto de operação limite, a partir
do qual ocorre a transição do MCD ao MCC.
p_ 1V (4.21)
Igualando as Eqs. (4.11) e (4.18), determina-se a razão cíclica crítica (Dcr), a qual
delimita os valores de D específicos a um modo de operação, conforme a Eq. (4.22). Em
função dos parâmetros normalizados de Ka, a corrente de saída (Ionor) e resistência de carga
(Ronor) são apresentadas nas Eqs. (4.23) e (4.24).

46 i · i 1# p (4.22)
p _h _2 · ,` · (4.23)
1p Xh X2 · ,` · (4.24)
Nota-se que os parâmetros D e M estão relacionados a um ponto de operação
qualquer, o qual é dependente da evolução das variáveis normalizadas Ionor e Ronor. Por
convenção, o parâmetro M pode assumir um comportamento caracterizado pelas Eqs. (4.11) e
(4.18) em função do modo de operação (MCC ou MCD).
Diferentes curvas que relacionam o parâmetro D em função do parâmetro Ionor
são esboçadas na Figura 4.6, para tanto são utilizadas as Eqs. (4.16), (4.22) e (4.23), de modo
que o parâmetro M é mantido constante. Adotando uma das curvas para M constante e
considerando uma evolução de Ionor desde 0 a 0,2; observa-se que o MCD é iniciado
(caracterizado por um D variável) e no instante em que Dcr é alcançado ocorre à transição
para o MCC (caracterizado por um D constante).
Figura 4.6 – Razão cíclica em função da corrente de carga normalizada
D
Ionor.
M = 10
M = 5
M = 3
M = 2
M = 1,5
M = 1,2
MCD
MCC
1
0,8
0,6
0,4
0,2
00,05 0,10 0,15 0,200
Fonte: autoria própria.
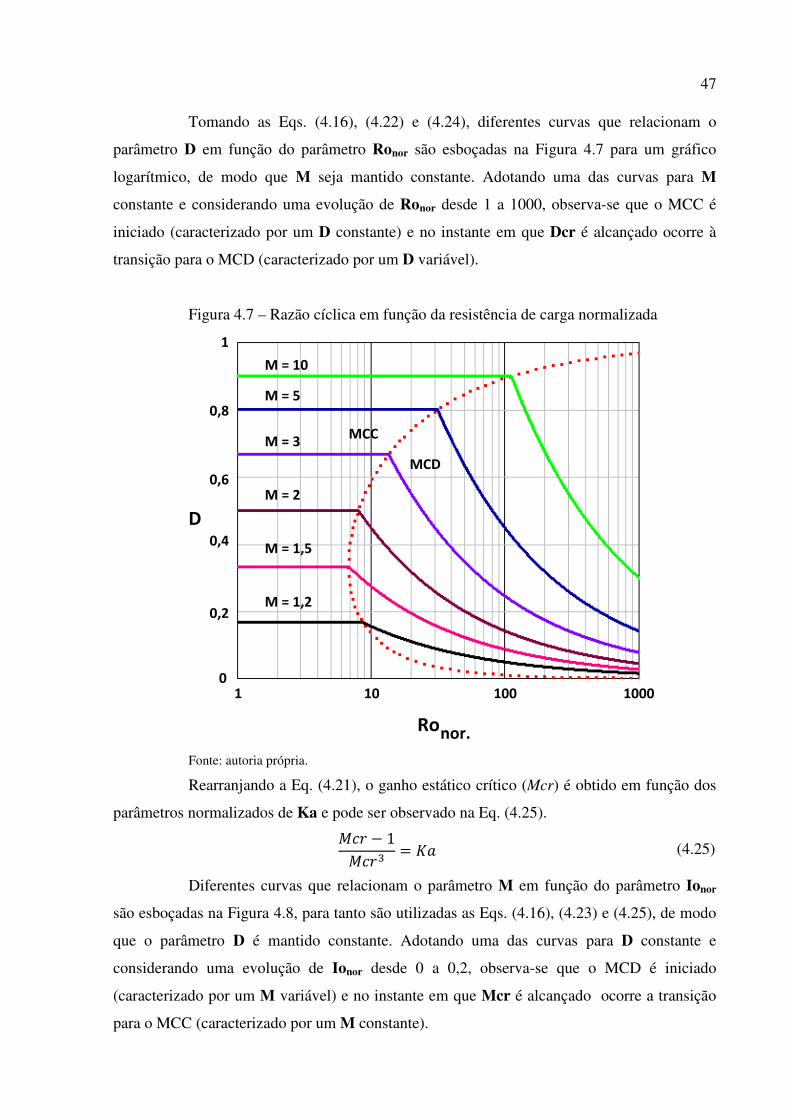
47
Tomando as Eqs. (4.16), (4.22) e (4.24), diferentes curvas que relacionam o
parâmetro D em função do parâmetro Ronor são esboçadas na Figura 4.7 para um gráfico
logarítmico, de modo que M seja mantido constante. Adotando uma das curvas para M
constante e considerando uma evolução de Ronor desde 1 a 1000, observa-se que o MCC é
iniciado (caracterizado por um D constante) e no instante em que Dcr é alcançado ocorre à
transição para o MCD (caracterizado por um D variável).
Figura 4.7 – Razão cíclica em função da resistência de carga normalizada
D
Ronor.
M = 10
M = 5
M = 3
M = 2
M = 1,5
M = 1,2
MCD
MCC
1
0,8
0,6
0,4
0,2
010 100 10001
Fonte: autoria própria.
Rearranjando a Eq. (4.21), o ganho estático crítico (Mcr) é obtido em função dos
parâmetros normalizados de Ka e pode ser observado na Eq. (4.25). 1V p (4.25)
Diferentes curvas que relacionam o parâmetro M em função do parâmetro Ionor
são esboçadas na Figura 4.8, para tanto são utilizadas as Eqs. (4.16), (4.23) e (4.25), de modo
que o parâmetro D é mantido constante. Adotando uma das curvas para D constante e
considerando uma evolução de Ionor desde 0 a 0,2, observa-se que o MCD é iniciado
(caracterizado por um M variável) e no instante em que Mcr é alcançado ocorre a transição
para o MCC (caracterizado por um M constante).
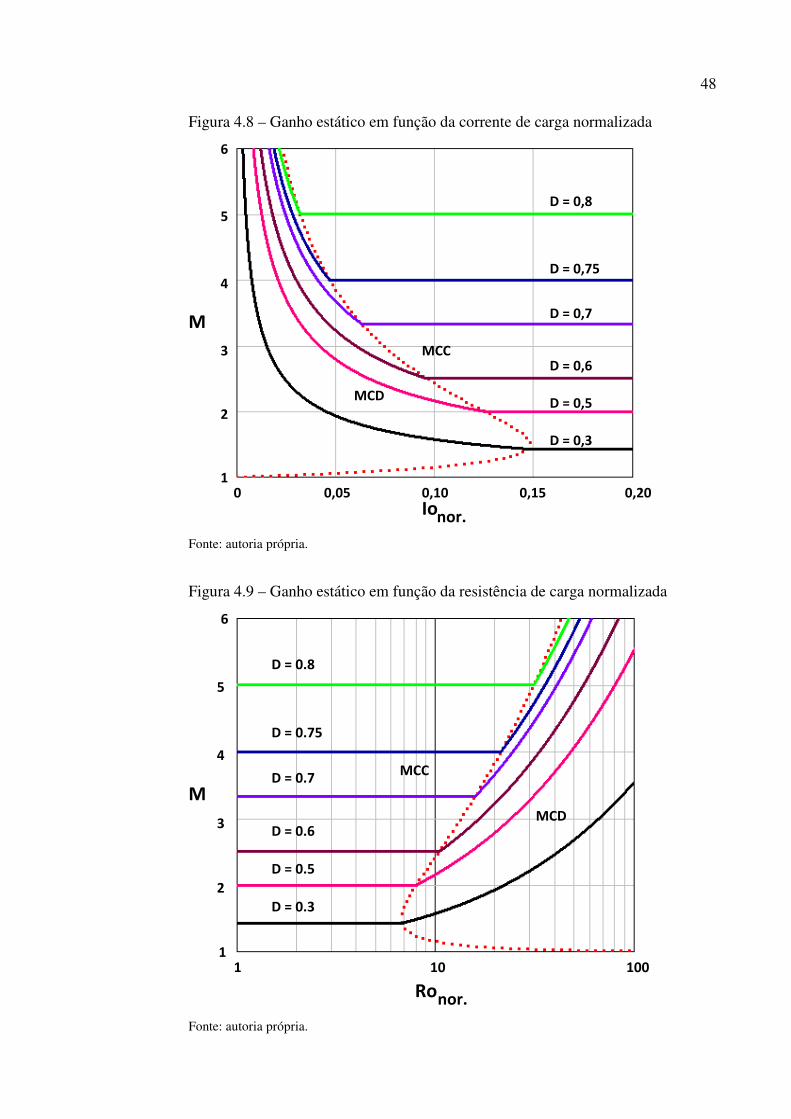
48
Figura 4.8 – Ganho estático em função da corrente de carga normalizada
M
Ionor.
D = 0,8
D = 0,75
D = 0,7
D = 0,6
D = 0,5
D = 0,3
MCD
MCC
6
5
4
3
2
10,05 0,10 0,15 0,200
Fonte: autoria própria.
Figura 4.9 – Ganho estático em função da resistência de carga normalizada
M
Ronor.
MCD
MCC
6
5
4
3
2
110 1001
D = 0.8
D = 0.75
D = 0.7
D = 0.6
D = 0.5
D = 0.3
Fonte: autoria própria.
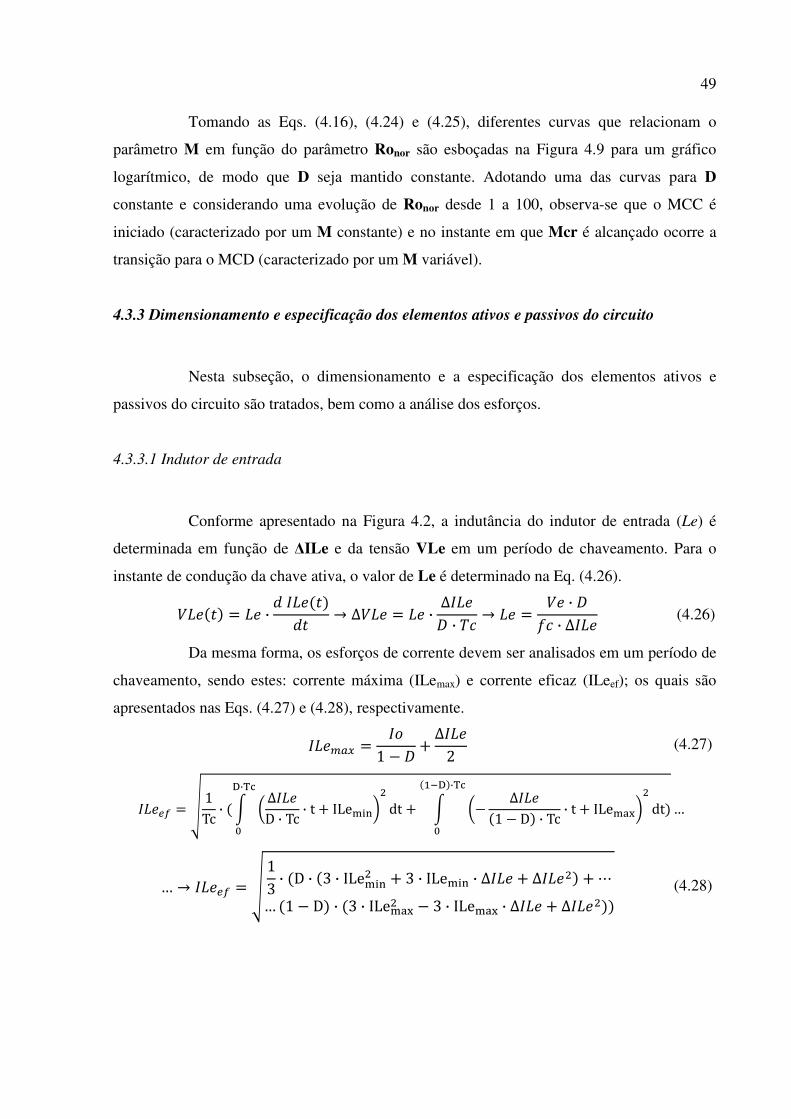
49
Tomando as Eqs. (4.16), (4.24) e (4.25), diferentes curvas que relacionam o
parâmetro M em função do parâmetro Ronor são esboçadas na Figura 4.9 para um gráfico
logarítmico, de modo que D seja mantido constante. Adotando uma das curvas para D
constante e considerando uma evolução de Ronor desde 1 a 100, observa-se que o MCC é
iniciado (caracterizado por um M constante) e no instante em que Mcr é alcançado ocorre a
transição para o MCD (caracterizado por um M variável).
4.3.3 Dimensionamento e especificação dos elementos ativos e passivos do circuito
Nesta subseção, o dimensionamento e a especificação dos elementos ativos e
passivos do circuito são tratados, bem como a análise dos esforços.
4.3.3.1 Indutor de entrada
Conforme apresentado na Figura 4.2, a indutância do indutor de entrada (Le) é
determinada em função de ∆ILe e da tensão VLe em um período de chaveamento. Para o
instante de condução da chave ativa, o valor de Le é determinado na Eq. (4.26).
,` ,` · _,` K ∆,` ,` · ∆_,`i · + K ,` ` · i · ∆_,` (4.26)
Da mesma forma, os esforços de corrente devem ser analisados em um período de
chaveamento, sendo estes: corrente máxima (ILemax) e corrente eficaz (ILeef); os quais são
apresentados nas Eqs. (4.27) e (4.28), respectivamente.
_,`34 _1 i * ∆_,`2 (4.27)
_,`! t 1Tc · E 1∆_,`D · Tc · t * ILeuvw2# dtD·Tb * E 1 ∆_,`1 D · Tc · t * ILeu|2# dt@~D·T
b …
… K _,`! t13 · D · 3 · ILeuvw# * 3 · ILeuvw · ∆_,` * ∆_,`# * T…1 D · 3 · ILeu|# 3 · ILeu| · ∆_,` * ∆_,`# (4.28)
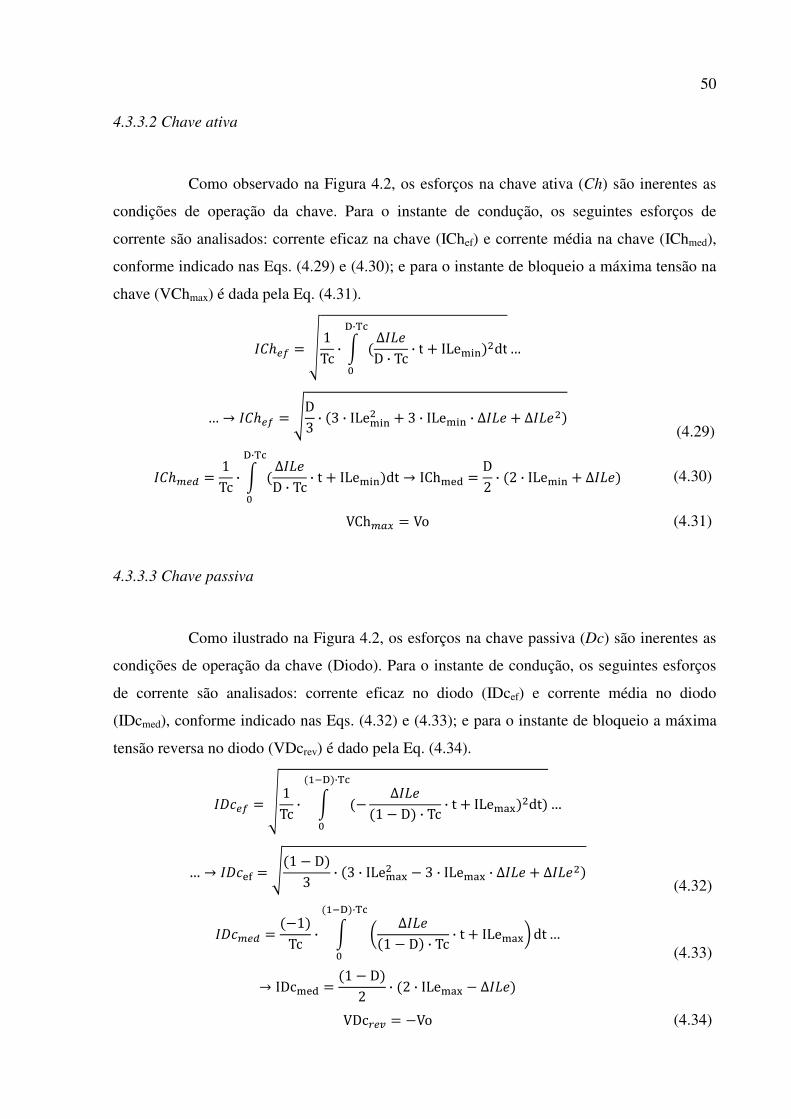
50 4.3.3.2 Chave ativa
Como observado na Figura 4.2, os esforços na chave ativa (Ch) são inerentes as
condições de operação da chave. Para o instante de condução, os seguintes esforços de
corrente são analisados: corrente eficaz na chave (IChef) e corrente média na chave (IChmed),
conforme indicado nas Eqs. (4.29) e (4.30); e para o instante de bloqueio a máxima tensão na
chave (VChmax) é dada pela Eq. (4.31).
_Z.! t 1Tc · E ∆_,`D · Tc · t * ILeuvw#dtD·Tb …
… K _Z.! oD3 · 3 · ILeuvw# * 3 · ILeuvw · ∆_,` * ∆_,`#
(4.29)
_Z.3) 1Tc · E ∆_,`D · Tc · t * ILeuvwdtD·Tb K IChu D2 · 2 · ILeuvw * ∆_,` (4.30)
VCh34 Vo (4.31)
4.3.3.3 Chave passiva
Como ilustrado na Figura 4.2, os esforços na chave passiva (Dc) são inerentes as
condições de operação da chave (Diodo). Para o instante de condução, os seguintes esforços
de corrente são analisados: corrente eficaz no diodo (IDcef) e corrente média no diodo
(IDcmed), conforme indicado nas Eqs. (4.32) e (4.33); e para o instante de bloqueio a máxima
tensão reversa no diodo (VDcrev) é dado pela Eq. (4.34).
_i! t 1Tc · E ∆_,`1 D · Tc · t * ILeu|#dt@~D·Tb …
… K _i o1 D3 · 3 · ILeu|# 3 · ILeu| · ∆_,` * ∆_,`#
(4.32)
_i3) 1Tc · E 1 ∆_,`1 D · Tc · t * ILeu|2dt…@~D·Tb
K IDcu 1 D2 · 2 · ILeu| ∆_,` (4.33)
VDc Vo (4.34)
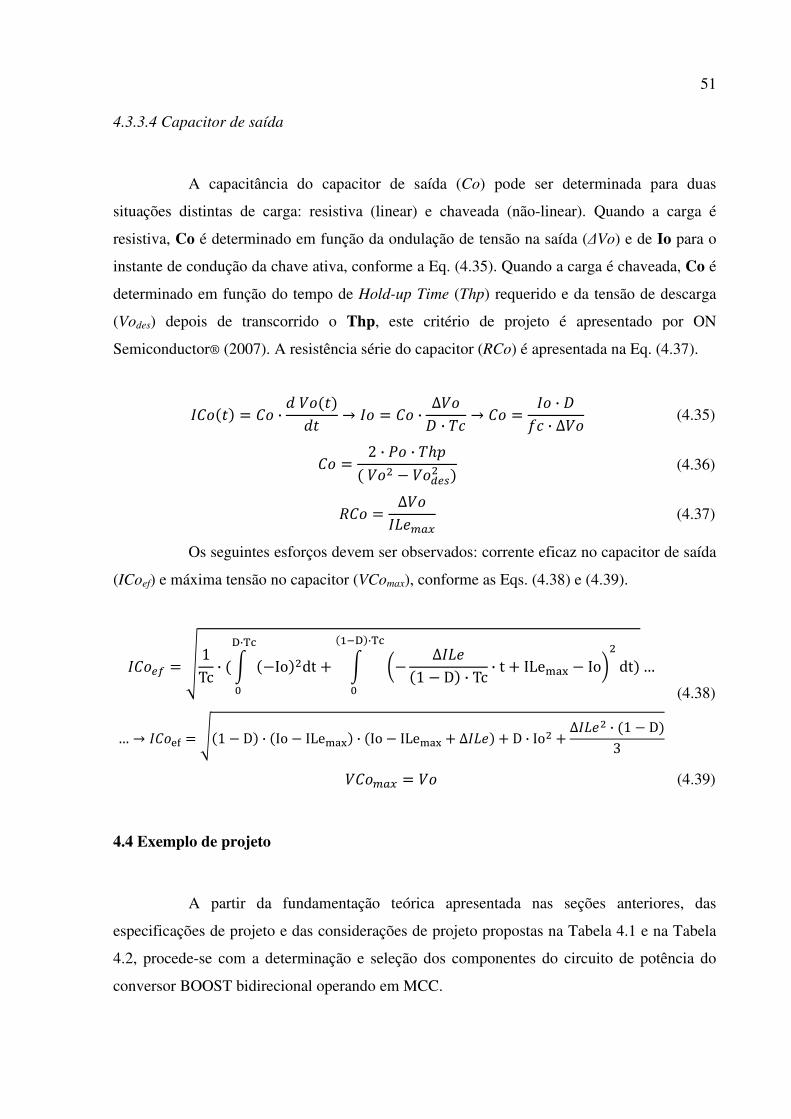
51 4.3.3.4 Capacitor de saída
A capacitância do capacitor de saída (Co) pode ser determinada para duas
situações distintas de carga: resistiva (linear) e chaveada (não-linear). Quando a carga é
resistiva, Co é determinado em função da ondulação de tensão na saída (∆Vo) e de Io para o
instante de condução da chave ativa, conforme a Eq. (4.35). Quando a carga é chaveada, Co é
determinado em função do tempo de Hold-up Time (Thp) requerido e da tensão de descarga
(Vodes) depois de transcorrido o Thp, este critério de projeto é apresentado por ON
Semiconductor® (2007). A resistência série do capacitor (RCo) é apresentada na Eq. (4.37).
_Z Z · K _ Z · ∆i · + K Z _ · i · ∆ (4.35)
Z 2 · Y · +.a # )# (4.36)
XZ ∆_,`34 (4.37)
Os seguintes esforços devem ser observados: corrente eficaz no capacitor de saída
(ICoef) e máxima tensão no capacitor (VComax), conforme as Eqs. (4.38) e (4.39).
_Z! t 1Tc · E Io#dtD·Tb * E 1 ∆_,`1 D · Tc · t * ILeu| Io2# dt@~D·T
b …
… K _Z o1 D · Io ILeu| · Io ILeu| * ∆_,` * D · Io# * ∆_,`# · 1 D3
(4.38)
Z34 (4.39)
4.4 Exemplo de projeto
A partir da fundamentação teórica apresentada nas seções anteriores, das
especificações de projeto e das considerações de projeto propostas na Tabela 4.1 e na Tabela
4.2, procede-se com a determinação e seleção dos componentes do circuito de potência do
conversor BOOST bidirecional operando em MCC.
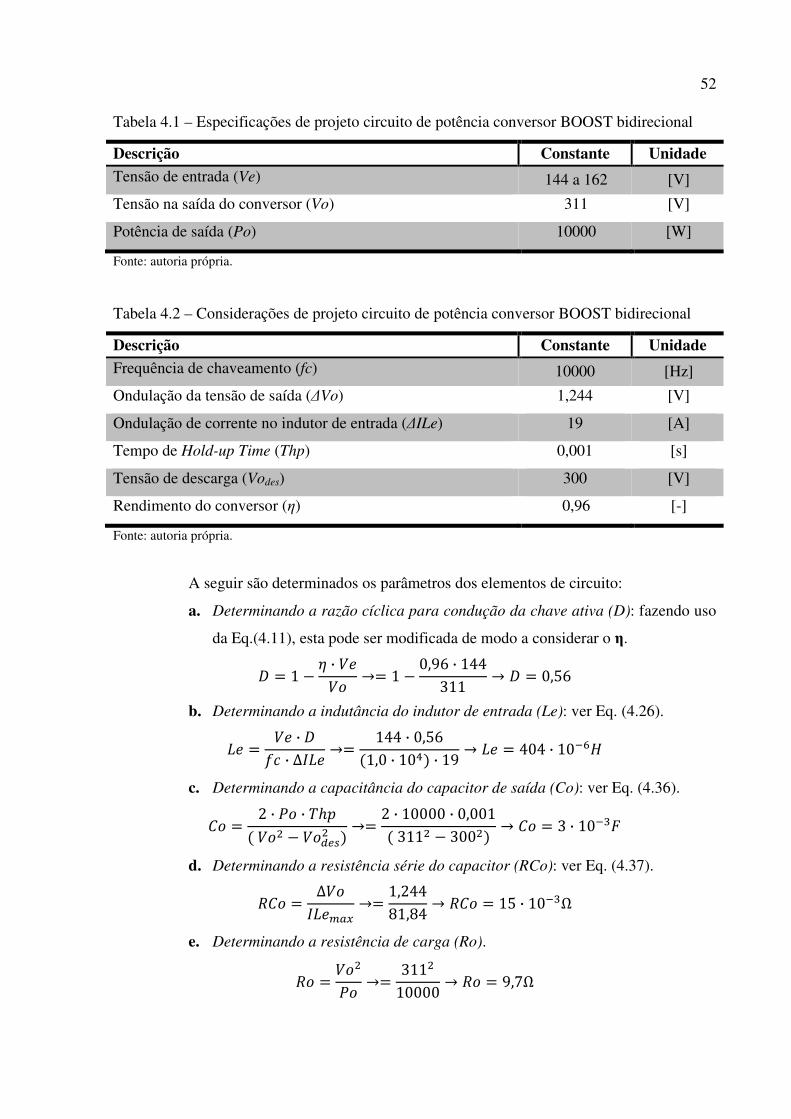
52 Tabela 4.1 – Especificações de projeto circuito de potência conversor BOOST bidirecional
Descrição Constante Unidade
Tensão de entrada (Ve) 144 a 162 [V]
Tensão na saída do conversor (Vo) 311 [V]
Potência de saída (Po) 10000 [W]
Fonte: autoria própria.
Tabela 4.2 – Considerações de projeto circuito de potência conversor BOOST bidirecional
Descrição Constante Unidade
Frequência de chaveamento (fc) 10000 [Hz]
Ondulação da tensão de saída (∆Vo) 1,244 [V]
Ondulação de corrente no indutor de entrada (∆ILe) 19 [A]
Tempo de Hold-up Time (Thp) 0,001 [s]
Tensão de descarga (Vodes) 300 [V]
Rendimento do conversor (η) 0,96 [-]
Fonte: autoria própria.
A seguir são determinados os parâmetros dos elementos de circuito:
a. Determinando a razão cíclica para condução da chave ativa (D): fazendo uso
da Eq.(4.11), esta pode ser modificada de modo a considerar o η.
i 1 < · ` K 1 0,96 · 144311 K i 0,56
b. Determinando a indutância do indutor de entrada (Le): ver Eq. (4.26).
,` ` · i · ∆_,` K 144 · 0,561,0 · 10 · 19 K ,` 404 · 10~
c. Determinando a capacitância do capacitor de saída (Co): ver Eq. (4.36).
Z 2 · Y · +.a # )# K 2 · 10000 · 0,001 311# 300# K Z 3 · 10~V
d. Determinando a resistência série do capacitor (RCo): ver Eq. (4.37).
XZ ∆_,`34 K 1,24481,84 K XZ 15 · 10~VΩ
e. Determinando a resistência de carga (Ro).
X #Y K 311#10000 K X 9,7Ω
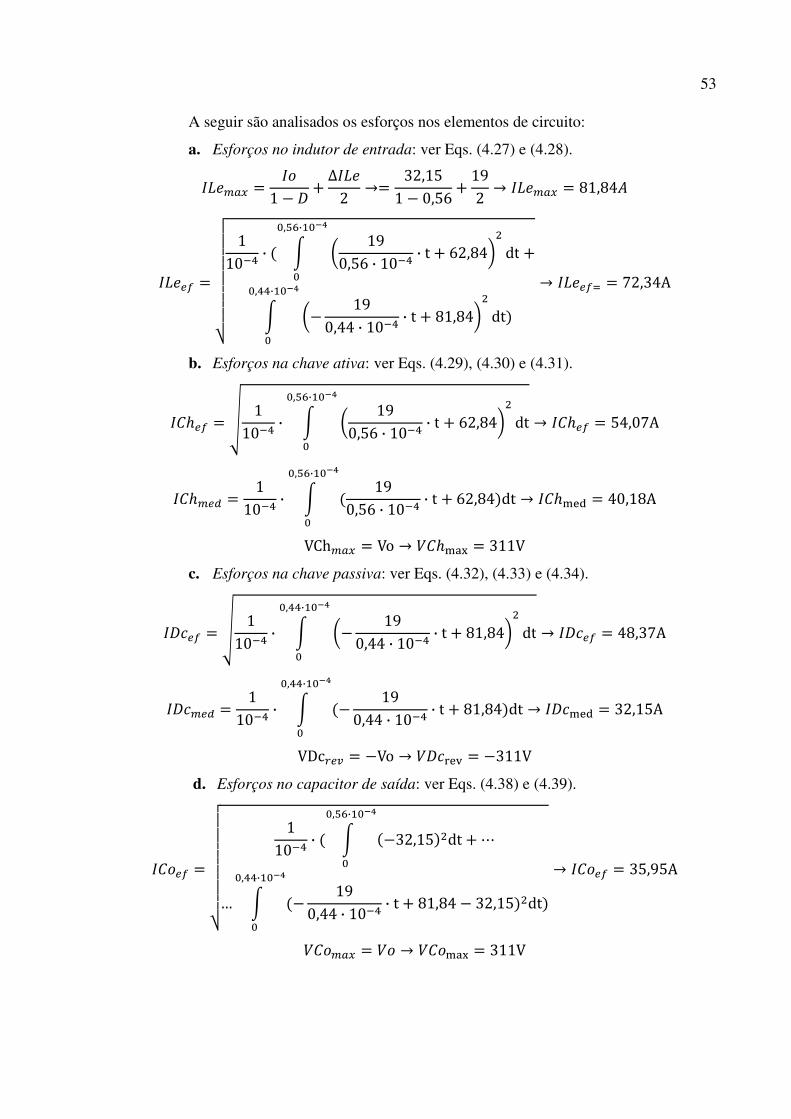
53
A seguir são analisados os esforços nos elementos de circuito:
a. Esforços no indutor de entrada: ver Eqs. (4.27) e (4.28).
_,`34 _1 i * ∆_,`2 K 32,151 0,56 * 192 K _,`34 81,84
_,`! 110~ · E 1 190,56 · 10~ · t * 62,842# dtb,·@b
b *E 1 190,44 · 10~ · t * 81,842# dtb,·@bb
K _,`! 72,34A b. Esforços na chave ativa: ver Eqs. (4.29), (4.30) e (4.31).
_Z.! t 110~ · E 1 190,56 · 10~ · t * 62,842# dtb,·@bb K _Z.! 54,07A
_Z.3) 110~ · E 190,56 · 10~ · t * 62,84dtb,·@bb K _Z.u 40,18A VCh34 Vo K Z.u| 311V
c. Esforços na chave passiva: ver Eqs. (4.32), (4.33) e (4.34).
_i! t 110~ · E 1 190,44 · 10~ · t * 81,842# dtb,·@bb K _i! 48,37A
_i3) 110~ · E 190,44 · 10~ · t * 81,84dtb,·@bb K _iu 32,15A VDc Vo K i 311V
d. Esforços no capacitor de saída: ver Eqs. (4.38) e (4.39).
_Z! 110~ · E 32,15#dtb,·@b
b *T… E 190,44 · 10~ · t * 81,84 32,15#dtb,·@b
bK _Z! 35,95A
Z34 K Zu| 311V
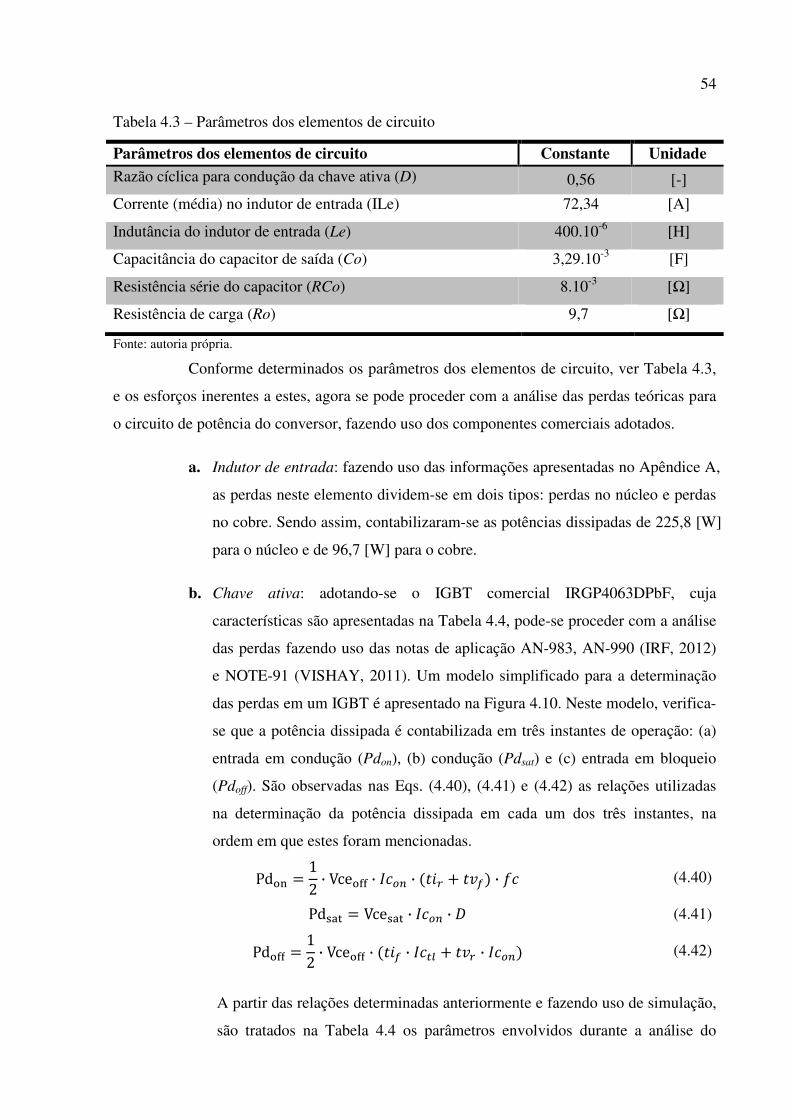
54 Tabela 4.3 – Parâmetros dos elementos de circuito
Parâmetros dos elementos de circuito Constante Unidade
Razão cíclica para condução da chave ativa (D) 0,56 [-]
Corrente (média) no indutor de entrada (ILe) 72,34 [A]
Indutância do indutor de entrada (Le) 400.10-6 [H]
Capacitância do capacitor de saída (Co) 3,29.10-3 [F]
Resistência série do capacitor (RCo) 8.10-3 [Ω]
Resistência de carga (Ro) 9,7 [Ω]
Fonte: autoria própria.
Conforme determinados os parâmetros dos elementos de circuito, ver Tabela 4.3,
e os esforços inerentes a estes, agora se pode proceder com a análise das perdas teóricas para
o circuito de potência do conversor, fazendo uso dos componentes comerciais adotados.
a. Indutor de entrada: fazendo uso das informações apresentadas no Apêndice A,
as perdas neste elemento dividem-se em dois tipos: perdas no núcleo e perdas
no cobre. Sendo assim, contabilizaram-se as potências dissipadas de 225,8 [W]
para o núcleo e de 96,7 [W] para o cobre.
b. Chave ativa: adotando-se o IGBT comercial IRGP4063DPbF, cuja
características são apresentadas na Tabela 4.4, pode-se proceder com a análise
das perdas fazendo uso das notas de aplicação AN-983, AN-990 (IRF, 2012)
e NOTE-91 (VISHAY, 2011). Um modelo simplificado para a determinação
das perdas em um IGBT é apresentado na Figura 4.10. Neste modelo, verifica-
se que a potência dissipada é contabilizada em três instantes de operação: (a)
entrada em condução (Pdon), (b) condução (Pdsat) e (c) entrada em bloqueio
(Pdoff). São observadas nas Eqs. (4.40), (4.41) e (4.42) as relações utilizadas
na determinação da potência dissipada em cada um dos três instantes, na
ordem em que estes foram mencionadas.
Pdw 12 · Vce · _h · / * ! · (4.40)
Pd| Vce| · _h · i (4.41)
Pd 12 · Vce · /! · _ * · _h (4.42)
A partir das relações determinadas anteriormente e fazendo uso de simulação,
são tratados na Tabela 4.4 os parâmetros envolvidos durante a análise do
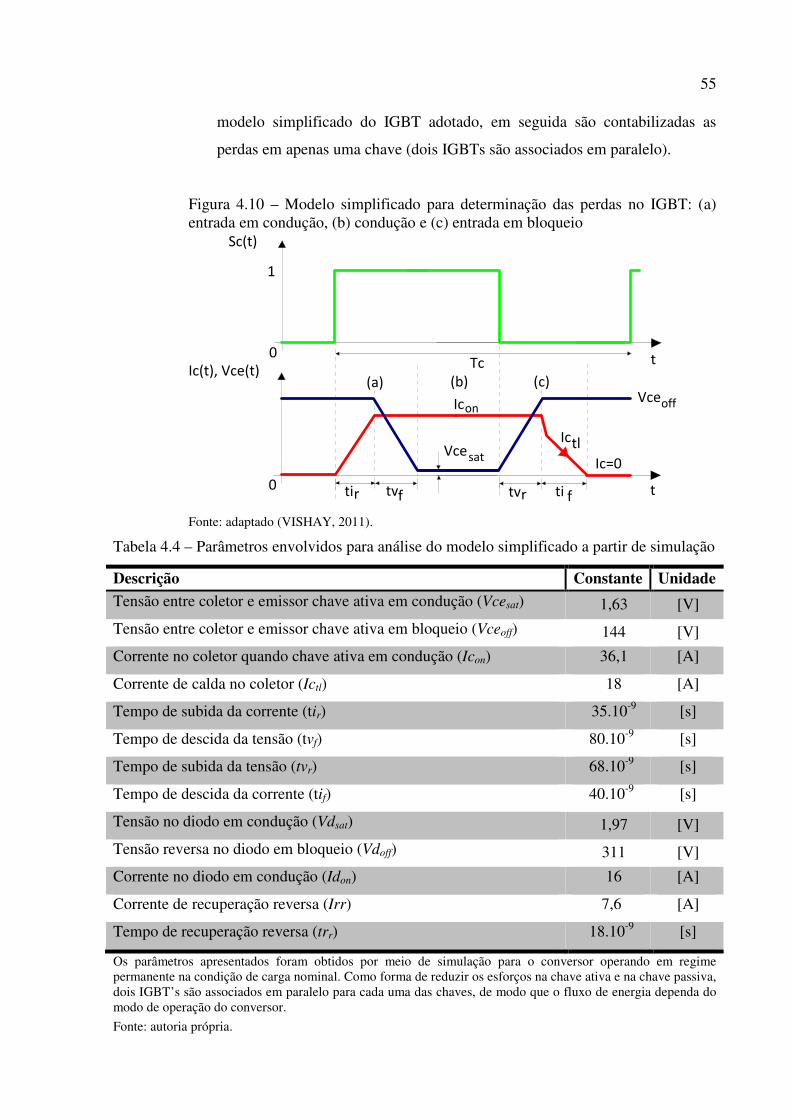
55
modelo simplificado do IGBT adotado, em seguida são contabilizadas as
perdas em apenas uma chave (dois IGBTs são associados em paralelo).
Figura 4.10 – Modelo simplificado para determinação das perdas no IGBT: (a) entrada em condução, (b) condução e (c) entrada em bloqueio
Sc(t)
0
1
Ic
Ic(t), Vce(t)
Vce
tir0
Vceoff
ttvf tvr ti f
Ictl
(a)
Ic=0
t
(b) (c)
Tc
on
sat
Fonte: adaptado (VISHAY, 2011).
Tabela 4.4 – Parâmetros envolvidos para análise do modelo simplificado a partir de simulação
Descrição Constante Unidade Tensão entre coletor e emissor chave ativa em condução (Vcesat) 1,63 [V]
Tensão entre coletor e emissor chave ativa em bloqueio (Vceoff) 144 [V]
Corrente no coletor quando chave ativa em condução (Icon) 36,1 [A]
Corrente de calda no coletor (Ictl) 18 [A]
Tempo de subida da corrente (tir) 35.10-9 [s]
Tempo de descida da tensão (tvf) 80.10-9 [s]
Tempo de subida da tensão (tvr) 68.10-9 [s]
Tempo de descida da corrente (tif) 40.10-9 [s]
Tensão no diodo em condução (Vdsat) 1,97 [V]
Tensão reversa no diodo em bloqueio (Vdoff) 311 [V]
Corrente no diodo em condução (Idon) 16 [A]
Corrente de recuperação reversa (Irr) 7,6 [A]
Tempo de recuperação reversa (trr) 18.10-9 [s]
Os parâmetros apresentados foram obtidos por meio de simulação para o conversor operando em regime permanente na condição de carga nominal. Como forma de reduzir os esforços na chave ativa e na chave passiva, dois IGBT’s são associados em paralelo para cada uma das chaves, de modo que o fluxo de energia dependa do modo de operação do conversor.
Fonte: autoria própria.
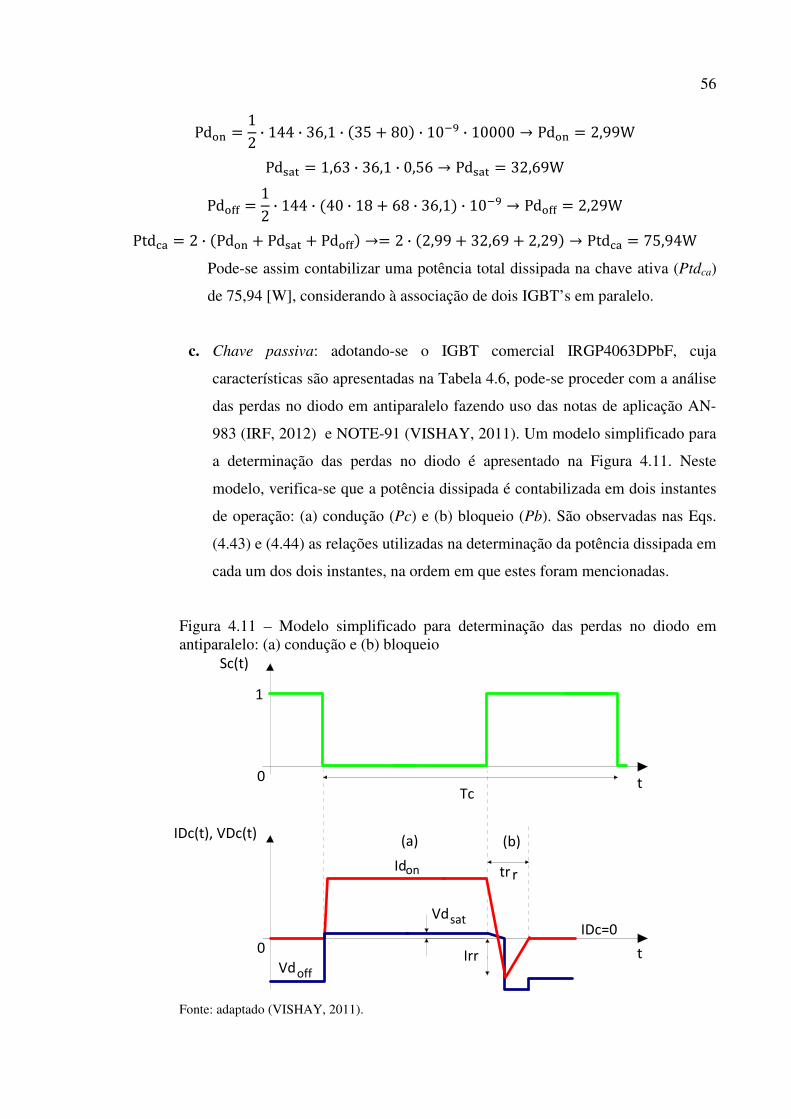
56 Pdw 12 · 144 · 36,1 · 35 * 80 · 10~ · 10000 K Pdw 2,99W Pd| 1,63 · 36,1 · 0,56 K Pd| 32,69W
Pd 12 · 144 · 40 · 18 * 68 · 36,1 · 10~ K Pd 2,29W Ptd| 2 · Pdw * Pd| * Pd K 2 · 2,99 * 32,69 * 2,29 K Ptd| 75,94W Pode-se assim contabilizar uma potência total dissipada na chave ativa (Ptdca)
de 75,94 [W], considerando à associação de dois IGBT’s em paralelo.
c. Chave passiva: adotando-se o IGBT comercial IRGP4063DPbF, cuja
características são apresentadas na Tabela 4.6, pode-se proceder com a análise
das perdas no diodo em antiparalelo fazendo uso das notas de aplicação AN-
983 (IRF, 2012) e NOTE-91 (VISHAY, 2011). Um modelo simplificado para
a determinação das perdas no diodo é apresentado na Figura 4.11. Neste
modelo, verifica-se que a potência dissipada é contabilizada em dois instantes
de operação: (a) condução (Pc) e (b) bloqueio (Pb). São observadas nas Eqs.
(4.43) e (4.44) as relações utilizadas na determinação da potência dissipada em
cada um dos dois instantes, na ordem em que estes foram mencionadas.
Figura 4.11 – Modelo simplificado para determinação das perdas no diodo em antiparalelo: (a) condução e (b) bloqueio
Sc(t)
0
1
Id
IDc(t), VDc(t)
Vd
0 t
tr r
Irr
(a)
IDc=0
tTc
on
sat
(b)
Vdoff
Fonte: adaptado (VISHAY, 2011).
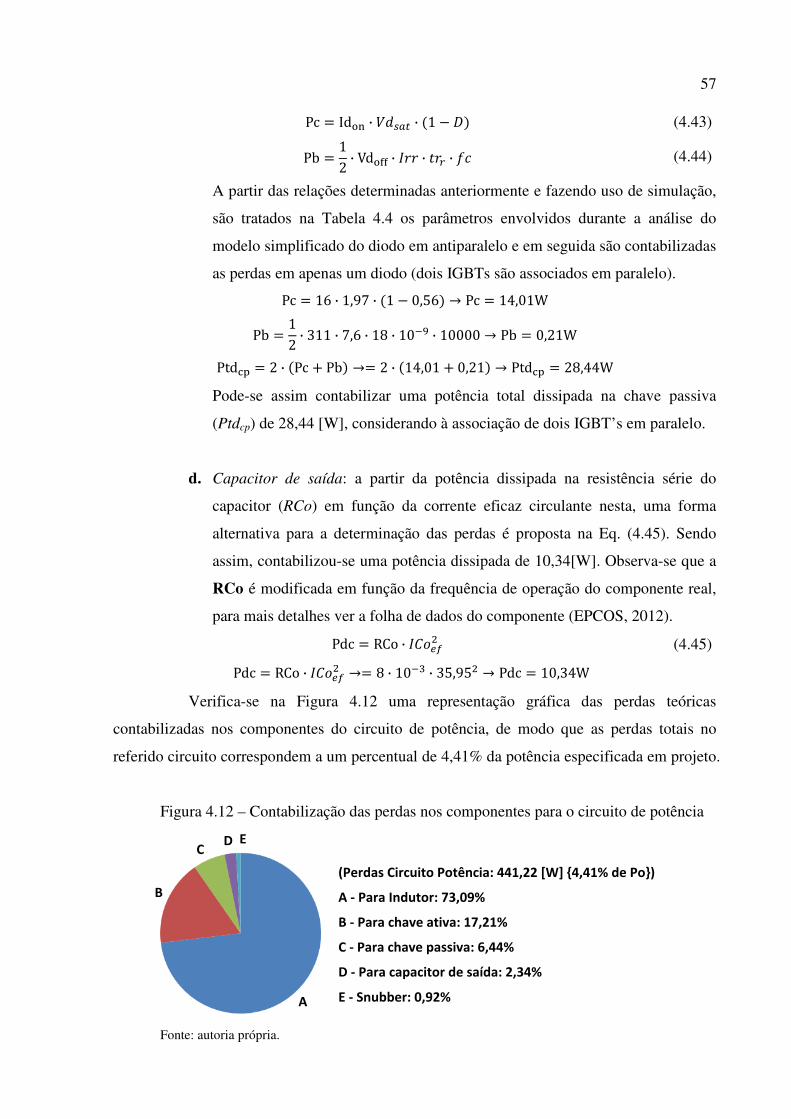
57 Pc Idw · · 1 i (4.43)
Pb 12 · Vd · _ · · (4.44)
A partir das relações determinadas anteriormente e fazendo uso de simulação,
são tratados na Tabela 4.4 os parâmetros envolvidos durante a análise do
modelo simplificado do diodo em antiparalelo e em seguida são contabilizadas
as perdas em apenas um diodo (dois IGBTs são associados em paralelo). Pc 16 · 1,97 · 1 0,56 K Pc 14,01W Pb 12 · 311 · 7,6 · 18 · 10~ · 10000 K Pb 0,21W Ptd 2 · Pc * Pb K 2 · 14,01 * 0,21 K Ptd 28,44W
Pode-se assim contabilizar uma potência total dissipada na chave passiva
(Ptdcp) de 28,44 [W], considerando à associação de dois IGBT’s em paralelo.
d. Capacitor de saída: a partir da potência dissipada na resistência série do
capacitor (RCo) em função da corrente eficaz circulante nesta, uma forma
alternativa para a determinação das perdas é proposta na Eq. (4.45). Sendo
assim, contabilizou-se uma potência dissipada de 10,34[W]. Observa-se que a
RCo é modificada em função da frequência de operação do componente real,
para mais detalhes ver a folha de dados do componente (EPCOS, 2012). Pdc RCo · _Z!# (4.45) Pdc RCo · _Z!# K 8 · 10~V · 35,95# K Pdc 10,34W
Verifica-se na Figura 4.12 uma representação gráfica das perdas teóricas
contabilizadas nos componentes do circuito de potência, de modo que as perdas totais no
referido circuito correspondem a um percentual de 4,41% da potência especificada em projeto.
Figura 4.12 – Contabilização das perdas nos componentes para o circuito de potência
A - Para Indutor: 73,09%
(Perdas Circuito Potência: 441,22 [W] 4,41% de Po)
B - Para chave ativa: 17,21%
C - Para chave passiva: 6,44%
D - Para capacitor de saída: 2,34%
E - Snubber: 0,92%
CD
A
B
E
Fonte: autoria própria.
58
Finalmente, são apresentados na Tabela 4.5 os componentes comerciais adotados
para a montagem do protótipo.
Tabela 4.5 – Componentes comerciais adotados
Componentes comerciais Descrição Quant. Chave de ativa IRGP4063DPbf 2
Chave passiva IRGP4063DPbf 2
Capacitor de saída B43501 (470uF /400 V) 7
Indutor [400µL][AMCC250][51espiras // 73fios AWG25] 1
Snubber C[47nF/630V], R[110kΩ/5W], D[UF5408] 4
Fonte: autoria própria.
59 CAPÍTULO 5 – MODELAGEM E CONTROLE DA TOPOLOGIA BOOST BIDIRECIONAL
Neste quinto capítulo, uma fundamentação teórica em respeito ao comportamento
dinâmico da topologia de conversor estático CC-CC não isolado BOOST bidirecional quando
realimentado é apresentada. São tratados em seqüência: introdução, linearização e validação
do modelo, implementação da técnica de controle e resultados simulados.
5.1 Introdução
A obtenção de um modelo matemático aplicável aos conversores estático CC-CC,
a qual é capaz de descrever a dinâmica de uma grandeza física em especial, é um método
analítico bastante utilizado durante a análise da estabilidade do sistema em malha aberta e
otimização das características transitórias quando realimentado.
Neste capítulo, o estudo teórico envolvendo a topologia de conversor estático CC-
CC não isolado BOOST bidirecional é concluído com o projeto e validação do conversor
realimentado a partir de simulação. Sendo assim, a fundamentação teórica apresentada nos
capítulos anteriores é aqui utilizada no desenvolvimento deste e dos capítulos seguintes.
Em (VORPÉRIAN, 1990), uma técnica de linearização de circuitos conversores
CC-CC é apresentada, esta realiza a substituição das chaves de potência por um modelo de
circuito em pequenos sinais denominado modelo CA da “chave PWM”. Utilizando as leis de
Kirchoff, obtém-se facilmente a Função de Transferência (FT) desejada. Em complementação,
outras técnicas de linearização são apresentadas em (ERICKSON; MAKSIMOVIÉ, 2003). A
técnica de “controle por modo corrente média” é utilizada em situações onde a corrente no
indutor deve ser monitorada e realimentada; as seguintes referências apresentam uma
fundamentação consistente quanto à técnica de controle (TANG et al., 1993; SUNTIO et al.,
1999; GARCERÁ et al., 1999). A transformação bilinear é uma função no domínio discreto, a
qual é capaz de mapear a região de estabilidade interna ao círculo de raio unitário em uma
região de estabilidade à esquerda do plano complexo para domínio contínuo; portanto, as
mesmas ferramentas de análise no domínio contínuo podem ser utilizadas para o projeto do
compensador discreto (KLEPL, 1986; FRANKLIN, 2006).
Conforme verificado na Figura 5.1, notam-se as representações simplificadas para
os sistemas de controle propostos: (a) domínio contínuo e (b) domínio discreto. Fazendo uso
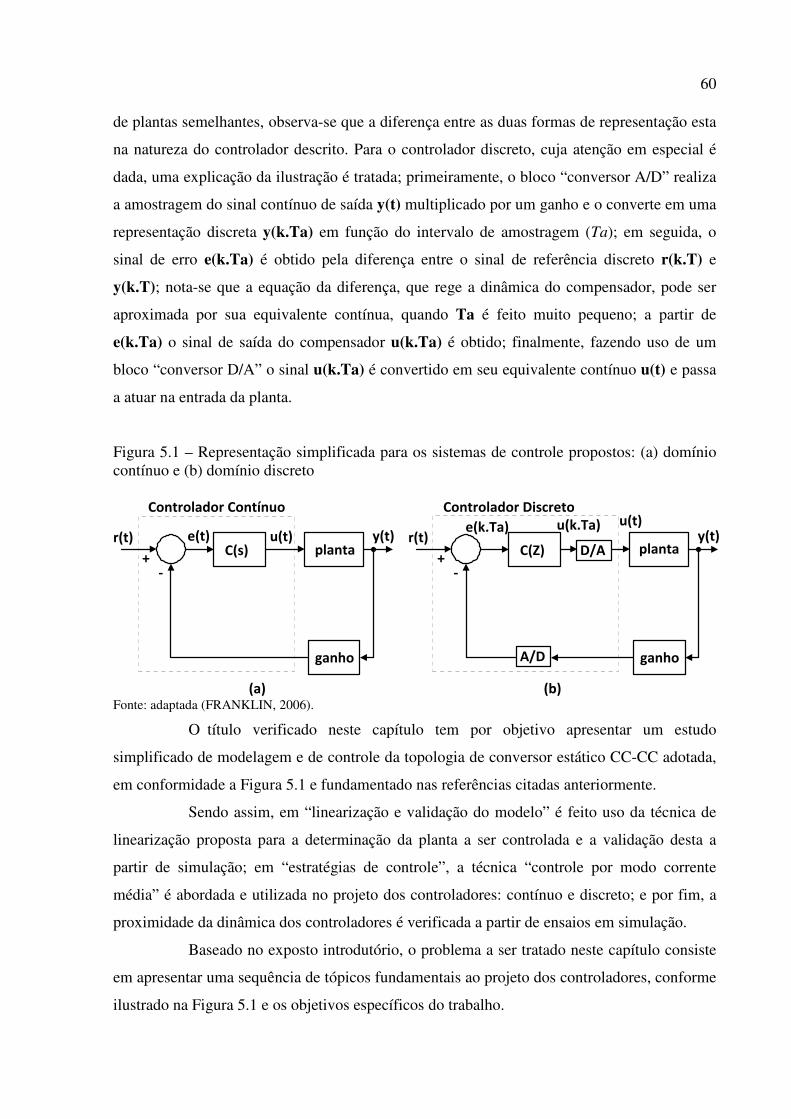
60 de plantas semelhantes, observa-se que a diferença entre as duas formas de representação esta
na natureza do controlador descrito. Para o controlador discreto, cuja atenção em especial é
dada, uma explicação da ilustração é tratada; primeiramente, o bloco “conversor A/D” realiza
a amostragem do sinal contínuo de saída y(t) multiplicado por um ganho e o converte em uma
representação discreta y(k.Ta) em função do intervalo de amostragem (Ta); em seguida, o
sinal de erro e(k.Ta) é obtido pela diferença entre o sinal de referência discreto r(k.T) e
y(k.T); nota-se que a equação da diferença, que rege a dinâmica do compensador, pode ser
aproximada por sua equivalente contínua, quando Ta é feito muito pequeno; a partir de
e(k.Ta) o sinal de saída do compensador u(k.Ta) é obtido; finalmente, fazendo uso de um
bloco “conversor D/A” o sinal u(k.Ta) é convertido em seu equivalente contínuo u(t) e passa
a atuar na entrada da planta.
Figura 5.1 – Representação simplificada para os sistemas de controle propostos: (a) domínio contínuo e (b) domínio discreto
(a)
+-
C(s) plantar(t)
ganho
e(t) u(t) y(t)
Controlador Contínuo
(b)
+-
C(Z) plantar(t)
ganho
e(k.Ta) u(k.Ta)y(t)
Controlador Discreto
A/D
D/A
u(t)
Fonte: adaptada (FRANKLIN, 2006).
O título verificado neste capítulo tem por objetivo apresentar um estudo
simplificado de modelagem e de controle da topologia de conversor estático CC-CC adotada,
em conformidade a Figura 5.1 e fundamentado nas referências citadas anteriormente.
Sendo assim, em “linearização e validação do modelo” é feito uso da técnica de
linearização proposta para a determinação da planta a ser controlada e a validação desta a
partir de simulação; em “estratégias de controle”, a técnica “controle por modo corrente
média” é abordada e utilizada no projeto dos controladores: contínuo e discreto; e por fim, a
proximidade da dinâmica dos controladores é verificada a partir de ensaios em simulação.
Baseado no exposto introdutório, o problema a ser tratado neste capítulo consiste
em apresentar uma sequência de tópicos fundamentais ao projeto dos controladores, conforme
ilustrado na Figura 5.1 e os objetivos específicos do trabalho.
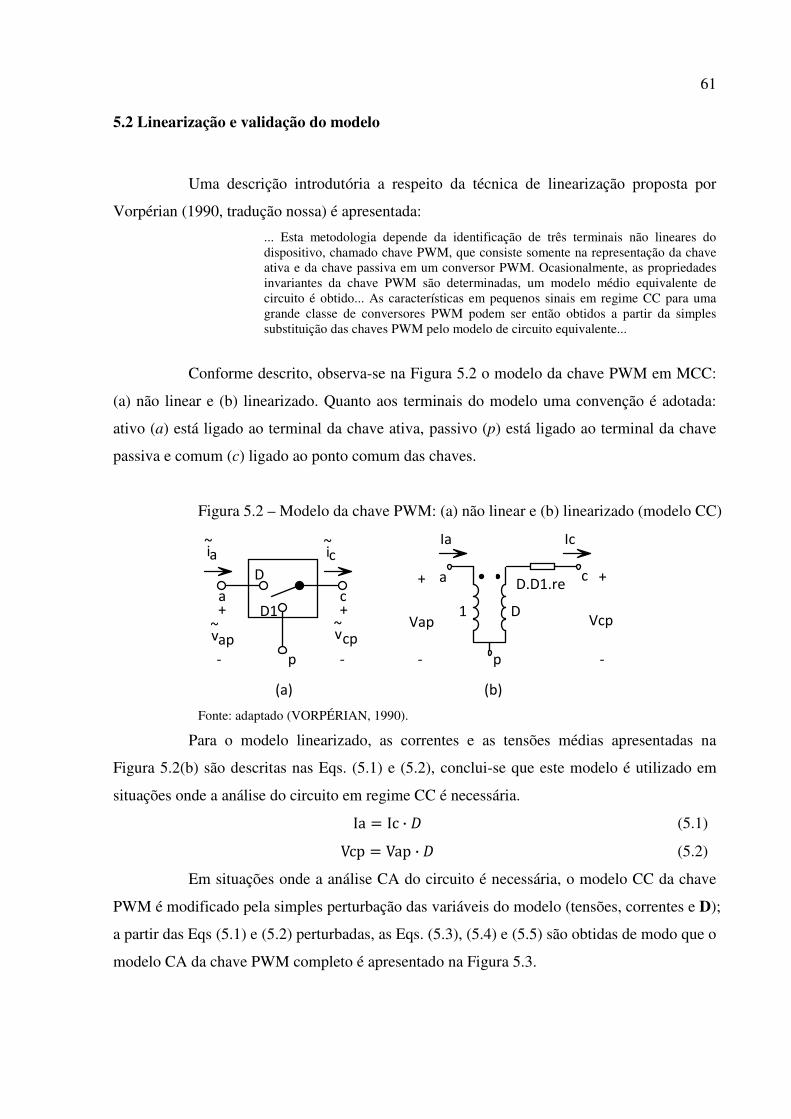
61 5.2 Linearização e validação do modelo
Uma descrição introdutória a respeito da técnica de linearização proposta por
Vorpérian (1990, tradução nossa) é apresentada:
... Esta metodologia depende da identificação de três terminais não lineares do dispositivo, chamado chave PWM, que consiste somente na representação da chave ativa e da chave passiva em um conversor PWM. Ocasionalmente, as propriedades invariantes da chave PWM são determinadas, um modelo médio equivalente de circuito é obtido... As características em pequenos sinais em regime CC para uma grande classe de conversores PWM podem ser então obtidos a partir da simples substituição das chaves PWM pelo modelo de circuito equivalente...
Conforme descrito, observa-se na Figura 5.2 o modelo da chave PWM em MCC:
(a) não linear e (b) linearizado. Quanto aos terminais do modelo uma convenção é adotada:
ativo (a) está ligado ao terminal da chave ativa, passivo (p) está ligado ao terminal da chave
passiva e comum (c) ligado ao ponto comum das chaves.
Figura 5.2 – Modelo da chave PWM: (a) não linear e (b) linearizado (modelo CC)
D
D1a
p
c
ia~
ic~
vap~
vcp~
+
-
+
-
(a)
a c
p
Ia Ic
Vap
+
-
Vcp
+
-
1 D
D.D1.re
(b) Fonte: adaptado (VORPÉRIAN, 1990).
Para o modelo linearizado, as correntes e as tensões médias apresentadas na
Figura 5.2(b) são descritas nas Eqs. (5.1) e (5.2), conclui-se que este modelo é utilizado em
situações onde a análise do circuito em regime CC é necessária. Ia Ic · i (5.1) Vcp Vap · i (5.2)
Em situações onde a análise CA do circuito é necessária, o modelo CC da chave
PWM é modificado pela simples perturbação das variáveis do modelo (tensões, correntes e D);
a partir das Eqs (5.1) e (5.2) perturbadas, as Eqs. (5.3), (5.4) e (5.5) são obtidas de modo que o
modelo CA da chave PWM completo é apresentado na Figura 5.3.
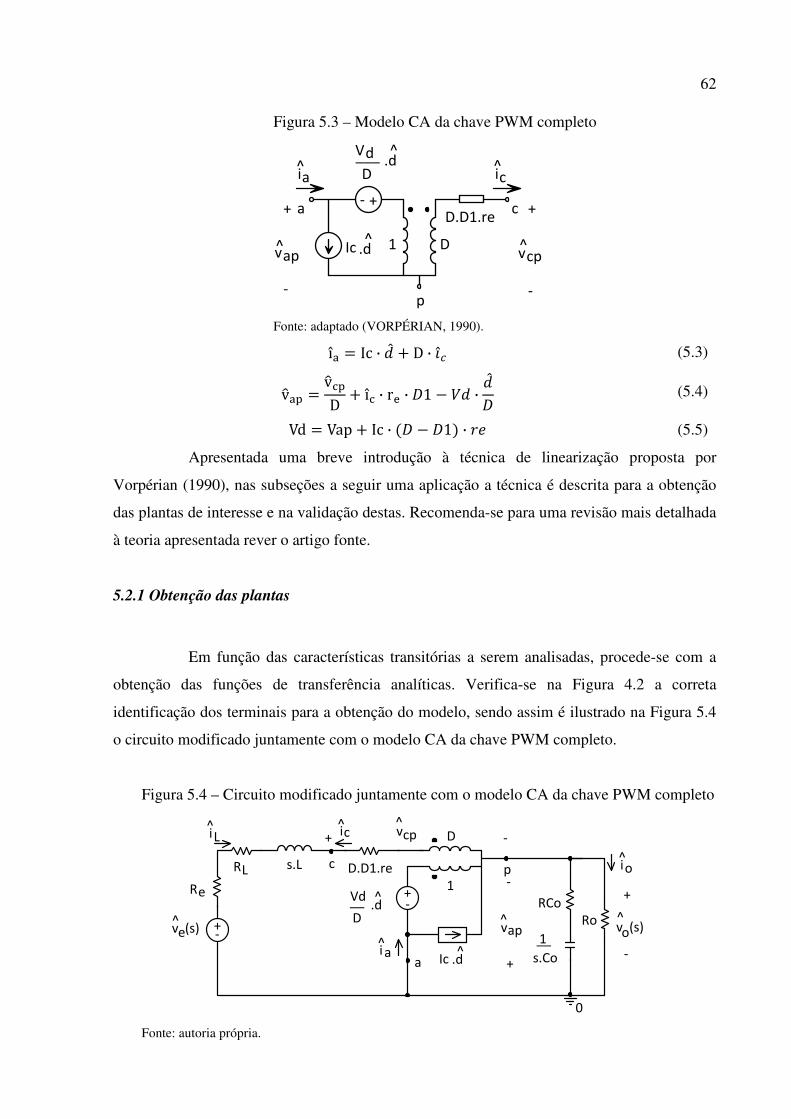
62
Figura 5.3 – Modelo CA da chave PWM completo
a c
p
ia ic
vap
+
-
vcp
+
-
1 D
D.D1.re
^ ^
^ ^
+-
Ic .d^
Vd.d^
D
___
Fonte: adaptado (VORPÉRIAN, 1990). ı| Ic · ¡ * D · ¢" (5.3)
v¤| v¤D * ı · r · i1 · ¡i (5.4)
Vd Vap * Ic · i i1 · ` (5.5)
Apresentada uma breve introdução à técnica de linearização proposta por
Vorpérian (1990), nas subseções a seguir uma aplicação a técnica é descrita para a obtenção
das plantas de interesse e na validação destas. Recomenda-se para uma revisão mais detalhada
à teoria apresentada rever o artigo fonte.
5.2.1 Obtenção das plantas
Em função das características transitórias a serem analisadas, procede-se com a
obtenção das funções de transferência analíticas. Verifica-se na Figura 4.2 a correta
identificação dos terminais para a obtenção do modelo, sendo assim é ilustrado na Figura 5.4
o circuito modificado juntamente com o modelo CA da chave PWM completo.
Figura 5.4 – Circuito modificado juntamente com o modelo CA da chave PWM completo
v^
ap
v^
cp
-
+ s.Co
Ro
0
+
v (s)
RCo
D
1
Ic^
Vd ^__
D
^
D.D1.re
+-
c p
.d
.d
ic
-1__
s.LRL i^o
^o
+-
Re
v (s)^e
i^
L
i^a
+ -
a
Fonte: autoria própria.
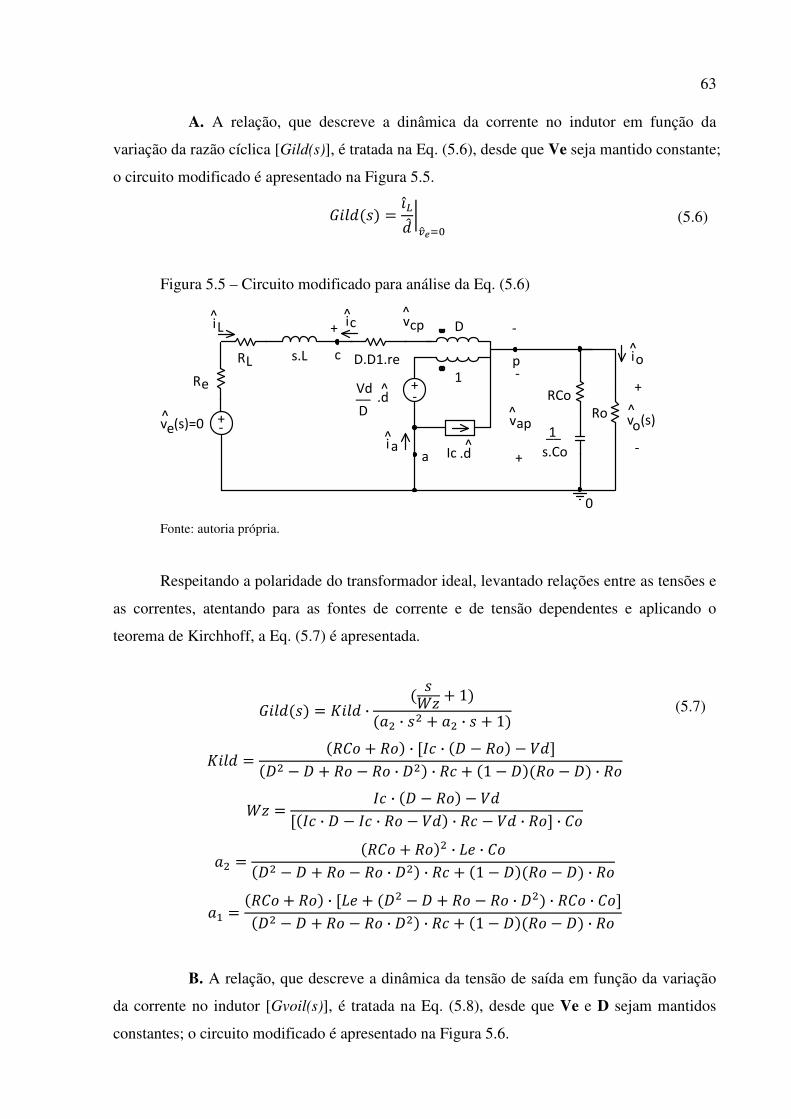
63
A. A relação, que descreve a dinâmica da corrente no indutor em função da
variação da razão cíclica [Gild(s)], é tratada na Eq. (5.6), desde que Ve seja mantido constante;
o circuito modificado é apresentado na Figura 5.5.
¦/§ ¨¢©¡ ª¤«b (5.6)
Figura 5.5 – Circuito modificado para análise da Eq. (5.6)
v^
ap
v^
cp
-
+ s.Co
Ro
0
+
v (s)
RCo
D
1
Ic^
Vd ^__
D
^
D.D1.re
+-
c p
.d
.d
ic
-1__
s.LRL i^o
^o
+-
Re
v (s)=0^e
i^
L
i^
a
+ -
a
Fonte: autoria própria.
Respeitando a polaridade do transformador ideal, levantado relações entre as tensões e
as correntes, atentando para as fontes de corrente e de tensão dependentes e aplicando o
teorema de Kirchhoff, a Eq. (5.7) é apresentada.
¦/§ p/§ · ¬ * 1# · # * # · * 1 (5.7)
p/§ XZ * X · _ · i X ®i# i * X X · i# · X * 1 iX i · X
¬ _ · i X _ · i _ · X · X · X® · Z
# XZ * X# · ,` · Zi# i * X X · i# · X * 1 iX i · X
@ XZ * X · ,` * i# i * X X · i# · XZ · Z®i# i * X X · i# · X * 1 iX i · X
B. A relação, que descreve a dinâmica da tensão de saída em função da variação
da corrente no indutor [Gvoil(s)], é tratada na Eq. (5.8), desde que Ve e D sejam mantidos
constantes; o circuito modificado é apresentado na Figura 5.6.
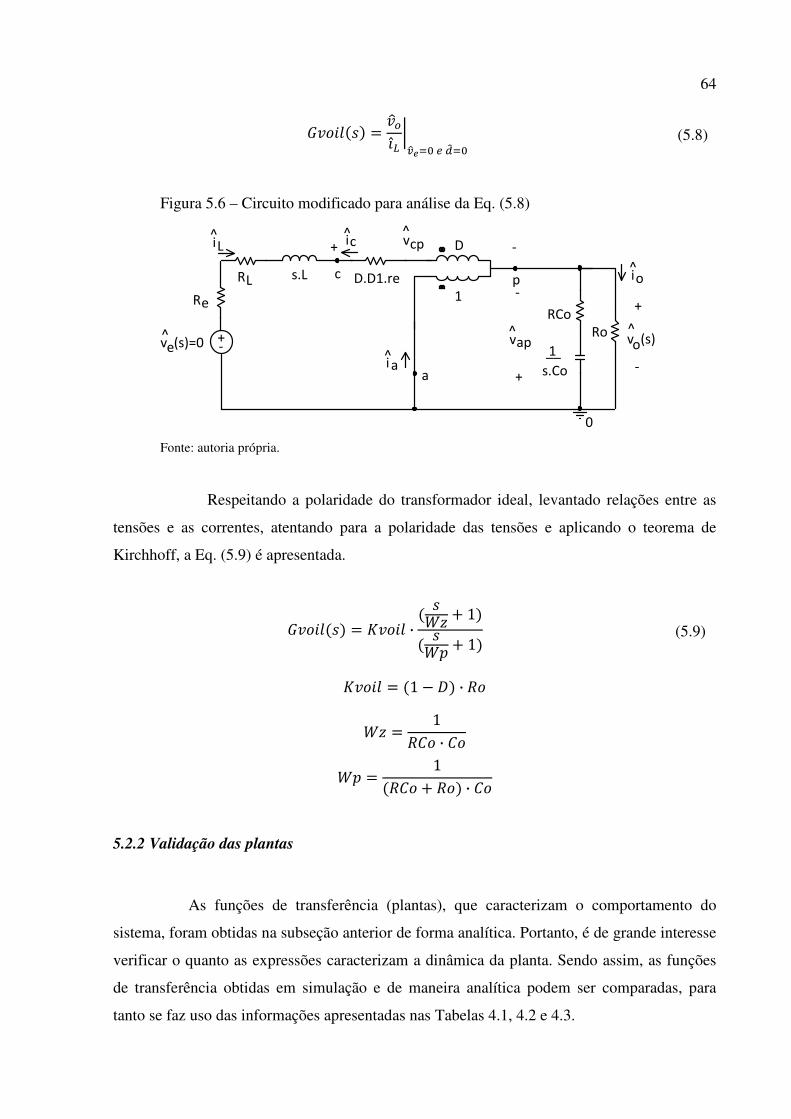
64 ¦/§ ¨¤¢© ª¤«b )b (5.8)
Figura 5.6 – Circuito modificado para análise da Eq. (5.8)
v^
ap
v^
cp
-
+ s.Co
Ro
0
+
v (s)
RCo
D
1
^
D.D1.rec p
ic
-1__
s.LRL i^o
^o
+-
Re
v (s)=0^e
i^
L
i^
a
+ -
a
Fonte: autoria própria.
Respeitando a polaridade do transformador ideal, levantado relações entre as
tensões e as correntes, atentando para a polaridade das tensões e aplicando o teorema de
Kirchhoff, a Eq. (5.9) é apresentada.
¦/§ p/§ · ¬ * 1 ¬a * 1 (5.9)
p/§ 1 i · X
¬ 1XZ · Z
¬a 1XZ * X · Z
5.2.2 Validação das plantas
As funções de transferência (plantas), que caracterizam o comportamento do
sistema, foram obtidas na subseção anterior de forma analítica. Portanto, é de grande interesse
verificar o quanto as expressões caracterizam a dinâmica da planta. Sendo assim, as funções
de transferência obtidas em simulação e de maneira analítica podem ser comparadas, para
tanto se faz uso das informações apresentadas nas Tabelas 4.1, 4.2 e 4.3.
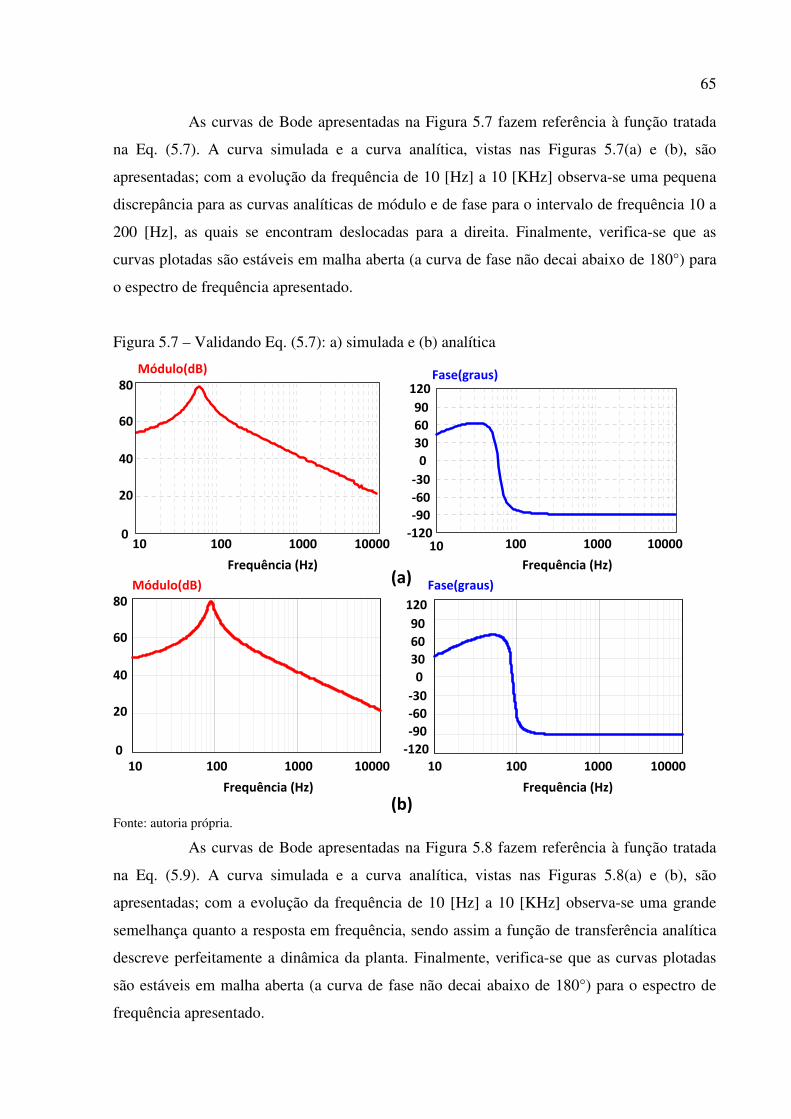
65
As curvas de Bode apresentadas na Figura 5.7 fazem referência à função tratada
na Eq. (5.7). A curva simulada e a curva analítica, vistas nas Figuras 5.7(a) e (b), são
apresentadas; com a evolução da frequência de 10 [Hz] a 10 [KHz] observa-se uma pequena
discrepância para as curvas analíticas de módulo e de fase para o intervalo de frequência 10 a
200 [Hz], as quais se encontram deslocadas para a direita. Finalmente, verifica-se que as
curvas plotadas são estáveis em malha aberta (a curva de fase não decai abaixo de 180°) para
o espectro de frequência apresentado.
Figura 5.7 – Validando Eq. (5.7): a) simulada e (b) analítica
60
40
20
0
80
Módulo(dB)
10 100 1000 10000
Frequência (Hz)
Fase(graus)
10 100 1000 10000
Frequência (Hz)
10 100 1000 10000
Frequência (Hz)
10 100 1000 10000
Frequência (Hz)
Módulo(dB) Fase(graus)(a)
(b)
0
-30
-60
-90
-120
30
60
90
120
0
-30
-60
-90
-120
30
60
90
120
60
40
20
0
80
Fonte: autoria própria.
As curvas de Bode apresentadas na Figura 5.8 fazem referência à função tratada
na Eq. (5.9). A curva simulada e a curva analítica, vistas nas Figuras 5.8(a) e (b), são
apresentadas; com a evolução da frequência de 10 [Hz] a 10 [KHz] observa-se uma grande
semelhança quanto a resposta em frequência, sendo assim a função de transferência analítica
descreve perfeitamente a dinâmica da planta. Finalmente, verifica-se que as curvas plotadas
são estáveis em malha aberta (a curva de fase não decai abaixo de 180°) para o espectro de
frequência apresentado.
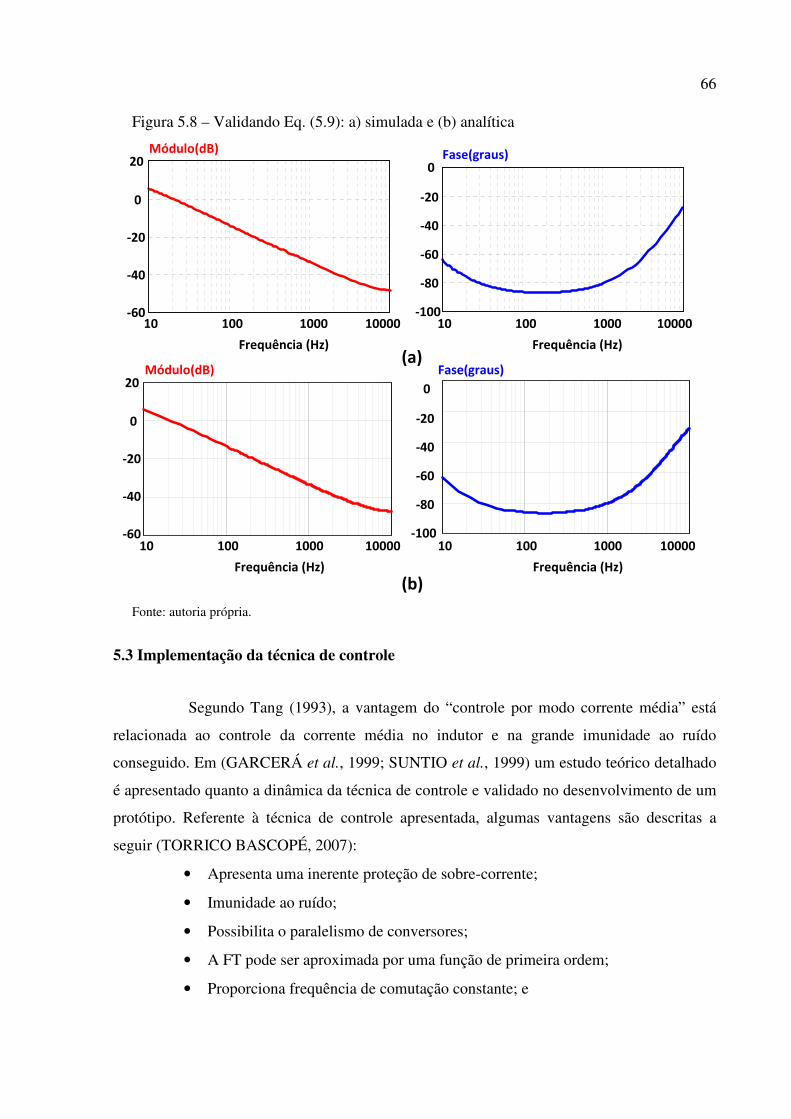
66
Figura 5.8 – Validando Eq. (5.9): a) simulada e (b) analítica
0
-20
-40
-60
20Módulo(dB)
10 100 1000 10000
Frequência (Hz)
0
-20
-40
-60
-80
-100
Fase(graus)
10 100 1000 10000
Frequência (Hz)
10 100 1000 10000
Frequência (Hz)
10 100 1000 10000
Frequência (Hz)
0
-20
-40
-60
20Módulo(dB)
0
-20
-40
-60
-80
-100
Fase(graus)(a)
(b) Fonte: autoria própria.
5.3 Implementação da técnica de controle
Segundo Tang (1993), a vantagem do “controle por modo corrente média” está
relacionada ao controle da corrente média no indutor e na grande imunidade ao ruído
conseguido. Em (GARCERÁ et al., 1999; SUNTIO et al., 1999) um estudo teórico detalhado
é apresentado quanto a dinâmica da técnica de controle e validado no desenvolvimento de um
protótipo. Referente à técnica de controle apresentada, algumas vantagens são descritas a
seguir (TORRICO BASCOPÉ, 2007):
• Apresenta uma inerente proteção de sobre-corrente;
• Imunidade ao ruído;
• Possibilita o paralelismo de conversores;
• A FT pode ser aproximada por uma função de primeira ordem;
• Proporciona frequência de comutação constante; e
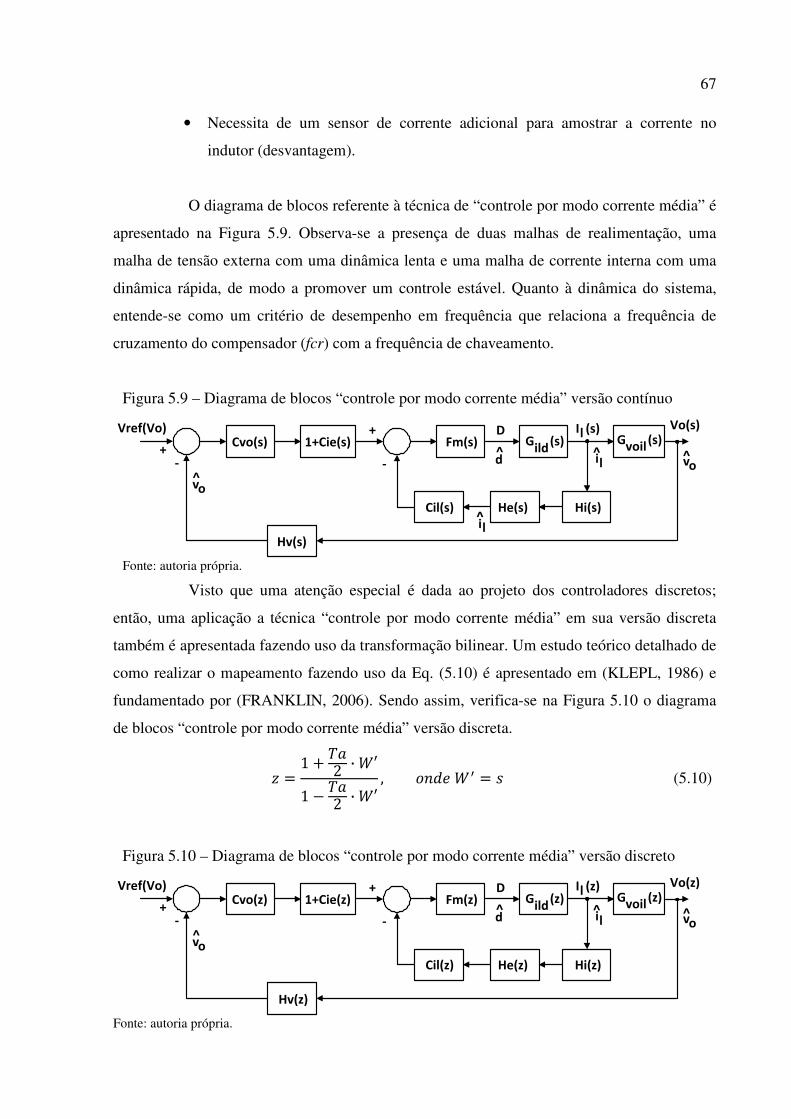
67
• Necessita de um sensor de corrente adicional para amostrar a corrente no
indutor (desvantagem).
O diagrama de blocos referente à técnica de “controle por modo corrente média” é
apresentado na Figura 5.9. Observa-se a presença de duas malhas de realimentação, uma
malha de tensão externa com uma dinâmica lenta e uma malha de corrente interna com uma
dinâmica rápida, de modo a promover um controle estável. Quanto à dinâmica do sistema,
entende-se como um critério de desempenho em frequência que relaciona a frequência de
cruzamento do compensador (fcr) com a frequência de chaveamento.
Figura 5.9 – Diagrama de blocos “controle por modo corrente média” versão contínuo
+-
Cvo(s) 1+Cie(s)Vref(Vo)
Fm(s) G (s)
Cil(s) Hi(s)
+
-
Hv(s)
ildG (s)
voil
Vo(s)
vo^
vo^
d^
il^
il^
I (s)D
He(s)
l
Fonte: autoria própria.
Visto que uma atenção especial é dada ao projeto dos controladores discretos;
então, uma aplicação a técnica “controle por modo corrente média” em sua versão discreta
também é apresentada fazendo uso da transformação bilinear. Um estudo teórico detalhado de
como realizar o mapeamento fazendo uso da Eq. (5.10) é apresentado em (KLEPL, 1986) e
fundamentado por (FRANKLIN, 2006). Sendo assim, verifica-se na Figura 5.10 o diagrama
de blocos “controle por modo corrente média” versão discreta.
1 * +2 · ¬°1 +2 · ¬° , 0` ¬± (5.10)
Figura 5.10 – Diagrama de blocos “controle por modo corrente média” versão discreto
+-
Cvo(z) 1+Cie(z)Vref(Vo)
Fm(z) G (z)
Cil(z) Hi(z)
+
-
Hv(z)
ildG (z)
voil
Vo(z)
vo^
vo^
d^
il^
I (z)D
He(z)
l
Fonte: autoria própria.
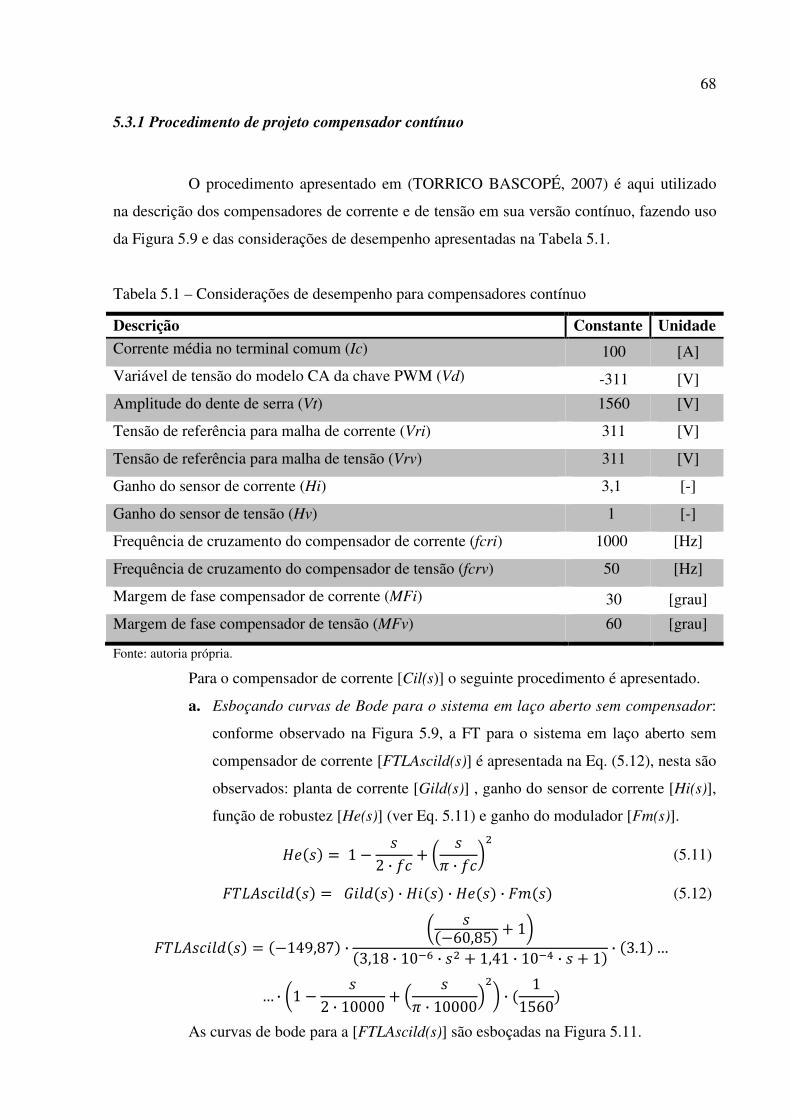
68 5.3.1 Procedimento de projeto compensador contínuo
O procedimento apresentado em (TORRICO BASCOPÉ, 2007) é aqui utilizado
na descrição dos compensadores de corrente e de tensão em sua versão contínuo, fazendo uso
da Figura 5.9 e das considerações de desempenho apresentadas na Tabela 5.1.
Tabela 5.1 – Considerações de desempenho para compensadores contínuo
Descrição Constante Unidade
Corrente média no terminal comum (Ic) 100 [A]
Variável de tensão do modelo CA da chave PWM (Vd) -311 [V]
Amplitude do dente de serra (Vt) 1560 [V]
Tensão de referência para malha de corrente (Vri) 311 [V]
Tensão de referência para malha de tensão (Vrv) 311 [V]
Ganho do sensor de corrente (Hi) 3,1 [-]
Ganho do sensor de tensão (Hv) 1 [-]
Frequência de cruzamento do compensador de corrente (fcri) 1000 [Hz]
Frequência de cruzamento do compensador de tensão (fcrv) 50 [Hz]
Margem de fase compensador de corrente (MFi) 30 [grau]
Margem de fase compensador de tensão (MFv) 60 [grau]
Fonte: autoria própria.
Para o compensador de corrente [Cil(s)] o seguinte procedimento é apresentado.
a. Esboçando curvas de Bode para o sistema em laço aberto sem compensador:
conforme observado na Figura 5.9, a FT para o sistema em laço aberto sem
compensador de corrente [FTLAscild(s)] é apresentada na Eq. (5.12), nesta são
observados: planta de corrente [Gild(s)] , ganho do sensor de corrente [Hi(s)],
função de robustez [He(s)] (ver Eq. 5.11) e ganho do modulador [Fm(s)].
` 1 2 · * 1 D · 2# (5.11)
+, /§ ¦/§ · / · ` · W (5.12)
+, /§ 149,87 · 1 60,85 * 123,18 · 10~ · # * 1,41 · 10~ · * 1 · 3.1…
… · 11 2 · 10000 * ² D · 10000³#2 · 11560 As curvas de bode para a [FTLAscild(s)] são esboçadas na Figura 5.11.
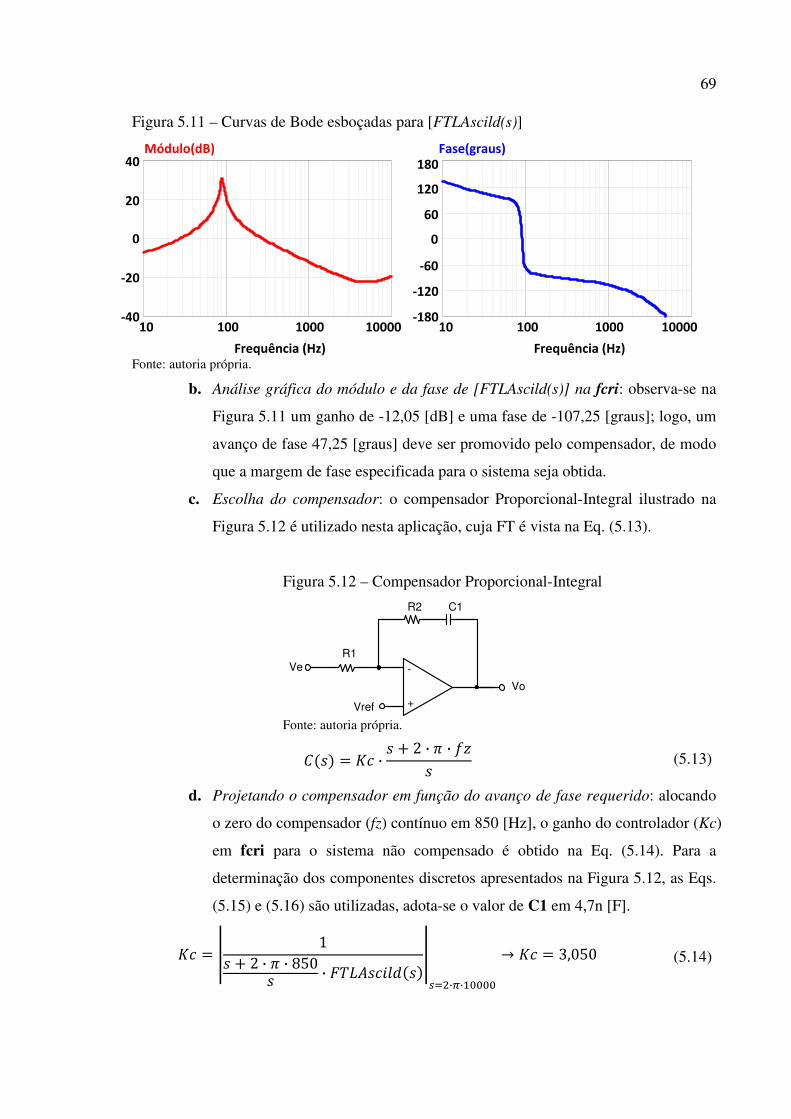
69
Figura 5.11 – Curvas de Bode esboçadas para [FTLAscild(s)]
10 100 1000 10000
Frequência (Hz)
10 100 1000 10000
Frequência (Hz)
20
0
-20
-40
40Módulo(dB)
180
120
60
0
-120
-180
Fase(graus)
-60
Fonte: autoria própria.
b. Análise gráfica do módulo e da fase de [FTLAscild(s)] na fcri: observa-se na
Figura 5.11 um ganho de -12,05 [dB] e uma fase de -107,25 [graus]; logo, um
avanço de fase 47,25 [graus] deve ser promovido pelo compensador, de modo
que a margem de fase especificada para o sistema seja obtida.
c. Escolha do compensador: o compensador Proporcional-Integral ilustrado na
Figura 5.12 é utilizado nesta aplicação, cuja FT é vista na Eq. (5.13).
Figura 5.12 – Compensador Proporcional-Integral
Ve
Vo
-
R2
R1
C1
+Vref Fonte: autoria própria.
Z p · * 2 · D · (5.13)
d. Projetando o compensador em função do avanço de fase requerido: alocando
o zero do compensador (fz) contínuo em 850 [Hz], o ganho do controlador (Kc)
em fcri para o sistema não compensado é obtido na Eq. (5.14). Para a
determinação dos componentes discretos apresentados na Figura 5.12, as Eqs.
(5.15) e (5.16) são utilizadas, adota-se o valor de C1 em 4,7n [F].
p ´ 1 * 2 · D · 850 · +, /§´#·µ·@bbbb K p 3,050 (5.14)
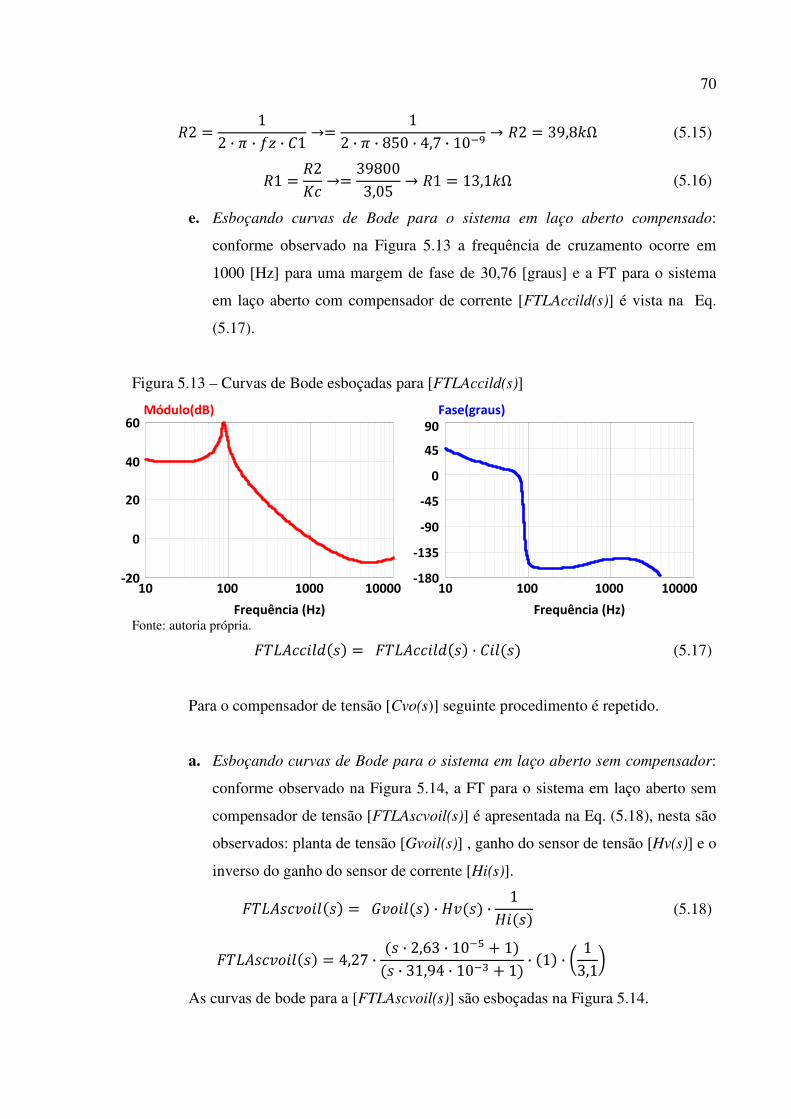
70 X2 12 · D · · Z1 K 12 · D · 850 · 4,7 · 10~ K X2 39,8¶Ω (5.15)
X1 X2p K 398003,05 K X1 13,1¶Ω (5.16)
e. Esboçando curvas de Bode para o sistema em laço aberto compensado:
conforme observado na Figura 5.13 a frequência de cruzamento ocorre em
1000 [Hz] para uma margem de fase de 30,76 [graus] e a FT para o sistema
em laço aberto com compensador de corrente [FTLAccild(s)] é vista na Eq.
(5.17).
Figura 5.13 – Curvas de Bode esboçadas para [FTLAccild(s)]
10 100 1000 10000
Frequência (Hz)
10 100 1000 10000
Frequência (Hz)
40
20
0
-20
60Módulo(dB)
90
45
0
-45
-135
-180
Fase(graus)
-90
Fonte: autoria própria. +, /§ +, /§ · Z/§ (5.17)
Para o compensador de tensão [Cvo(s)] seguinte procedimento é repetido.
a. Esboçando curvas de Bode para o sistema em laço aberto sem compensador:
conforme observado na Figura 5.14, a FT para o sistema em laço aberto sem
compensador de tensão [FTLAscvoil(s)] é apresentada na Eq. (5.18), nesta são
observados: planta de tensão [Gvoil(s)] , ganho do sensor de tensão [Hv(s)] e o
inverso do ganho do sensor de corrente [Hi(s)].
+, /§ ¦/§ · · 1/ (5.18)
+, /§ 4,27 · · 2,63 · 10~ * 1 · 31,94 · 10~V * 1 · 1 · 1 13,12
As curvas de bode para a [FTLAscvoil(s)] são esboçadas na Figura 5.14.
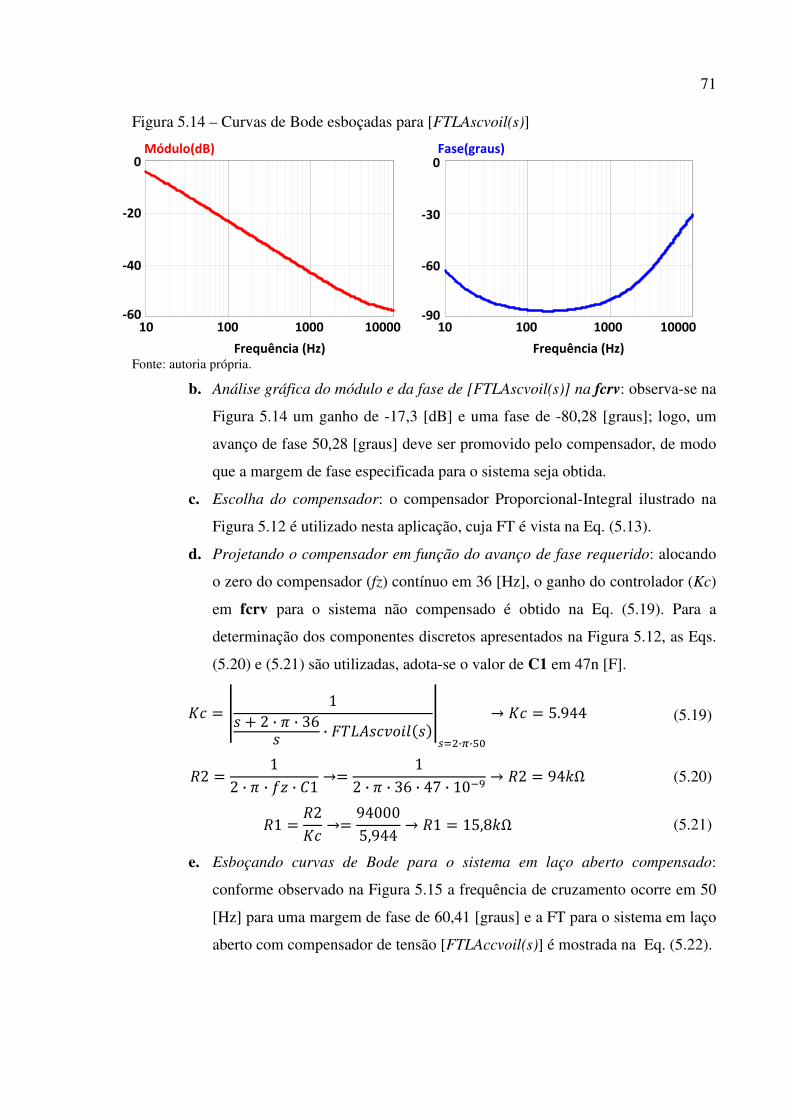
71
Figura 5.14 – Curvas de Bode esboçadas para [FTLAscvoil(s)]
10 100 1000 10000
Frequência (Hz)
10 100 1000 10000
Frequência (Hz)
-20
-40
-60
0Módulo(dB)
0
-30
-90
Fase(graus)
-60
Fonte: autoria própria.
b. Análise gráfica do módulo e da fase de [FTLAscvoil(s)] na fcrv: observa-se na
Figura 5.14 um ganho de -17,3 [dB] e uma fase de -80,28 [graus]; logo, um
avanço de fase 50,28 [graus] deve ser promovido pelo compensador, de modo
que a margem de fase especificada para o sistema seja obtida.
c. Escolha do compensador: o compensador Proporcional-Integral ilustrado na
Figura 5.12 é utilizado nesta aplicação, cuja FT é vista na Eq. (5.13).
d. Projetando o compensador em função do avanço de fase requerido: alocando
o zero do compensador (fz) contínuo em 36 [Hz], o ganho do controlador (Kc)
em fcrv para o sistema não compensado é obtido na Eq. (5.19). Para a
determinação dos componentes discretos apresentados na Figura 5.12, as Eqs.
(5.20) e (5.21) são utilizadas, adota-se o valor de C1 em 47n [F].
p ´ 1 * 2 · D · 36 · +, /§´#·µ·b K p 5.944 (5.19)
X2 12 · D · · Z1 K 12 · D · 36 · 47 · 10~ K X2 94¶Ω (5.20)
X1 X2p K 940005,944 K X1 15,8¶Ω (5.21)
e. Esboçando curvas de Bode para o sistema em laço aberto compensado:
conforme observado na Figura 5.15 a frequência de cruzamento ocorre em 50
[Hz] para uma margem de fase de 60,41 [graus] e a FT para o sistema em laço
aberto com compensador de tensão [FTLAccvoil(s)] é mostrada na Eq. (5.22).
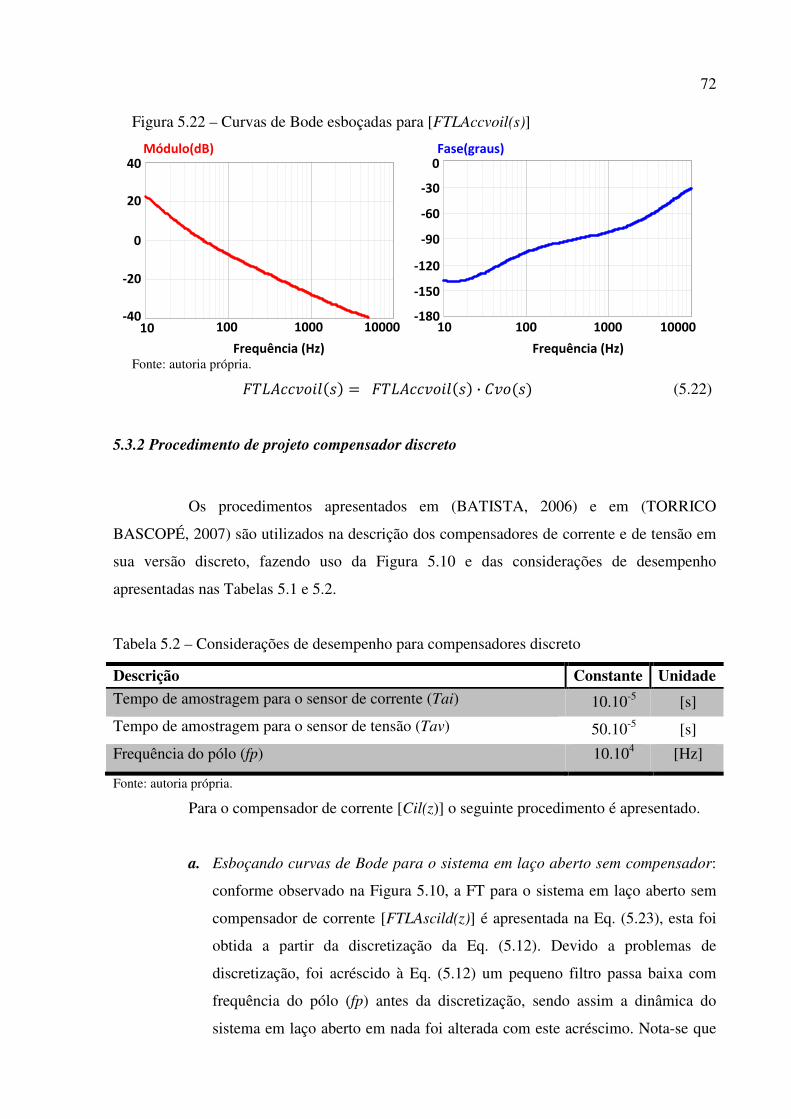
72
Figura 5.22 – Curvas de Bode esboçadas para [FTLAccvoil(s)]
10 100 1000 10000
Frequência (Hz)
10 100 1000 10000
Frequência (Hz)
20
0
-20
-40
40Módulo(dB)
0
-30
-60
-90
-150
-180
Fase(graus)
-120
Fonte: autoria própria. +, /§ +, /§ · Z (5.22)
5.3.2 Procedimento de projeto compensador discreto
Os procedimentos apresentados em (BATISTA, 2006) e em (TORRICO
BASCOPÉ, 2007) são utilizados na descrição dos compensadores de corrente e de tensão em
sua versão discreto, fazendo uso da Figura 5.10 e das considerações de desempenho
apresentadas nas Tabelas 5.1 e 5.2.
Tabela 5.2 – Considerações de desempenho para compensadores discreto
Descrição Constante Unidade
Tempo de amostragem para o sensor de corrente (Tai) 10.10-5 [s]
Tempo de amostragem para o sensor de tensão (Tav) 50.10-5 [s]
Frequência do pólo (fp) 10.104 [Hz]
Fonte: autoria própria.
Para o compensador de corrente [Cil(z)] o seguinte procedimento é apresentado.
a. Esboçando curvas de Bode para o sistema em laço aberto sem compensador:
conforme observado na Figura 5.10, a FT para o sistema em laço aberto sem
compensador de corrente [FTLAscild(z)] é apresentada na Eq. (5.23), esta foi
obtida a partir da discretização da Eq. (5.12). Devido a problemas de
discretização, foi acréscido à Eq. (5.12) um pequeno filtro passa baixa com
frequência do pólo (fp) antes da discretização, sendo assim a dinâmica do
sistema em laço aberto em nada foi alterada com este acréscimo. Nota-se que
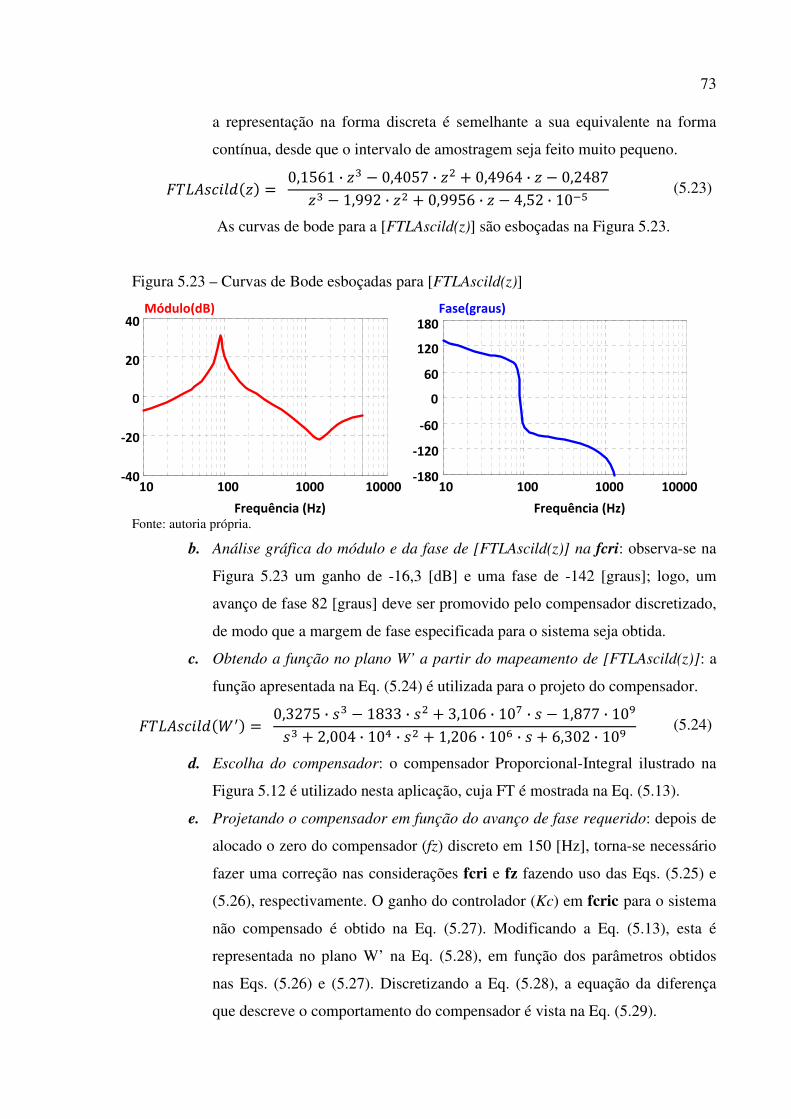
73
a representação na forma discreta é semelhante a sua equivalente na forma
contínua, desde que o intervalo de amostragem seja feito muito pequeno.
+, /§ 0,1561 · V 0,4057 · # * 0,4964 · 0,2487V 1,992 · # * 0,9956 · 4,52 · 10~ (5.23)
As curvas de bode para a [FTLAscild(z)] são esboçadas na Figura 5.23.
Figura 5.23 – Curvas de Bode esboçadas para [FTLAscild(z)]
10 100 1000 10000
Frequência (Hz)
10 100 1000 10000
Frequência (Hz)
20
0
-20
-40
40Módulo(dB)
180
120
60
0
-120
-180
Fase(graus)
-60
Fonte: autoria própria.
b. Análise gráfica do módulo e da fase de [FTLAscild(z)] na fcri: observa-se na
Figura 5.23 um ganho de -16,3 [dB] e uma fase de -142 [graus]; logo, um
avanço de fase 82 [graus] deve ser promovido pelo compensador discretizado,
de modo que a margem de fase especificada para o sistema seja obtida.
c. Obtendo a função no plano W’ a partir do mapeamento de [FTLAscild(z)]: a
função apresentada na Eq. (5.24) é utilizada para o projeto do compensador.
+, /§¬± 0,3275 · V 1833 · # * 3,106 · 10· · 1,877 · 10V * 2,004 · 10 · # * 1,206 · 10 · * 6,302 · 10 (5.24)
d. Escolha do compensador: o compensador Proporcional-Integral ilustrado na
Figura 5.12 é utilizado nesta aplicação, cuja FT é mostrada na Eq. (5.13).
e. Projetando o compensador em função do avanço de fase requerido: depois de
alocado o zero do compensador (fz) discreto em 150 [Hz], torna-se necessário
fazer uma correção nas considerações fcri e fz fazendo uso das Eqs. (5.25) e
(5.26), respectivamente. O ganho do controlador (Kc) em fcric para o sistema
não compensado é obtido na Eq. (5.27). Modificando a Eq. (5.13), esta é
representada no plano W’ na Eq. (5.28), em função dos parâmetros obtidos
nas Eqs. (5.26) e (5.27). Discretizando a Eq. (5.28), a equação da diferença
que descreve o comportamento do compensador é vista na Eq. (5.29).
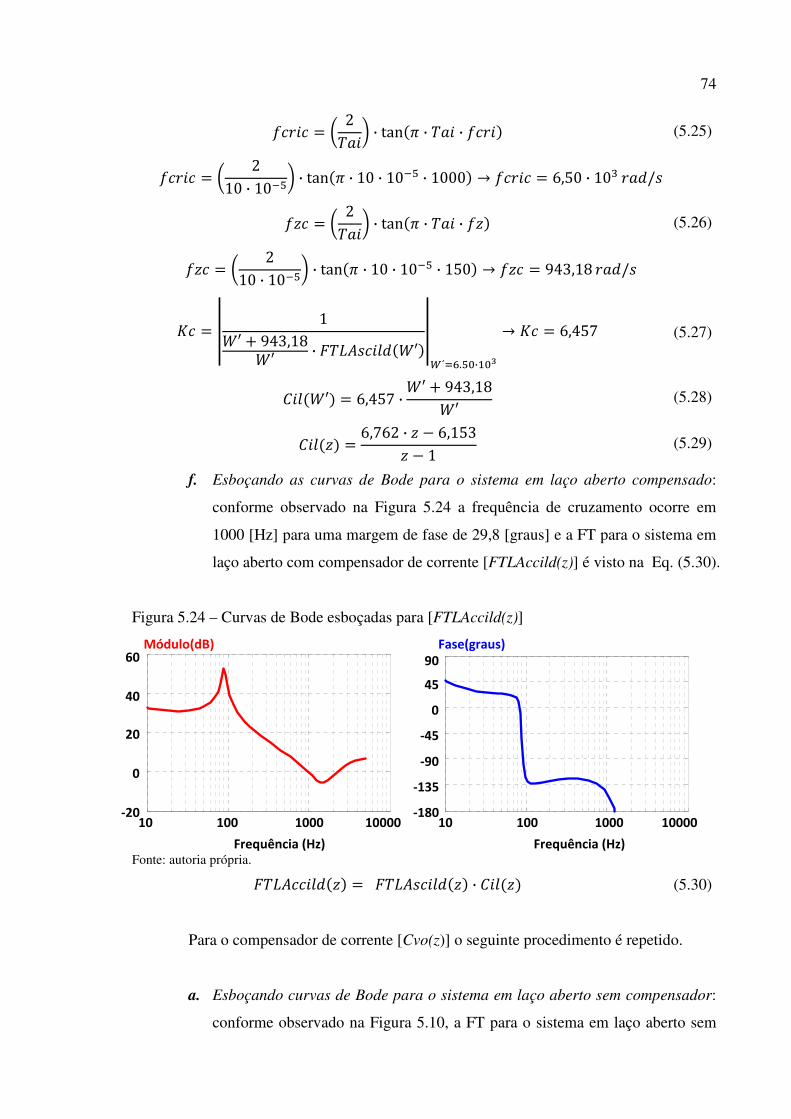
74 / 1 2+/2 · tanD · +/ · / (5.25)
/ 1 210 · 10~2 · tanD · 10 · 10~ · 1000 K / 6,50 · 10V /
1 2+/2 · tanD · +/ · (5.26)
1 210 · 10~2 · tanD · 10 · 10~ · 150 K 943,18 /
p ¸ 1¬° * 943,18¬° · +, /§¬°¸¹´.b·@b»K p 6,457 (5.27)
Z/§¬° 6,457 · ¬° * 943,18¬° (5.28)
Z/§ 6,762 · 6,153 1 (5.29)
f. Esboçando as curvas de Bode para o sistema em laço aberto compensado:
conforme observado na Figura 5.24 a frequência de cruzamento ocorre em
1000 [Hz] para uma margem de fase de 29,8 [graus] e a FT para o sistema em
laço aberto com compensador de corrente [FTLAccild(z)] é visto na Eq. (5.30).
Figura 5.24 – Curvas de Bode esboçadas para [FTLAccild(z)]
10 100 1000 10000
Frequência (Hz)
10 100 1000 10000
Frequência (Hz)
40
20
0
-20
60Módulo(dB)
90
45
0
-45
-135
-180
Fase(graus)
-90
Fonte: autoria própria. +, /§ +, /§ · Z/§ (5.30)
Para o compensador de corrente [Cvo(z)] o seguinte procedimento é repetido.
a. Esboçando curvas de Bode para o sistema em laço aberto sem compensador:
conforme observado na Figura 5.10, a FT para o sistema em laço aberto sem
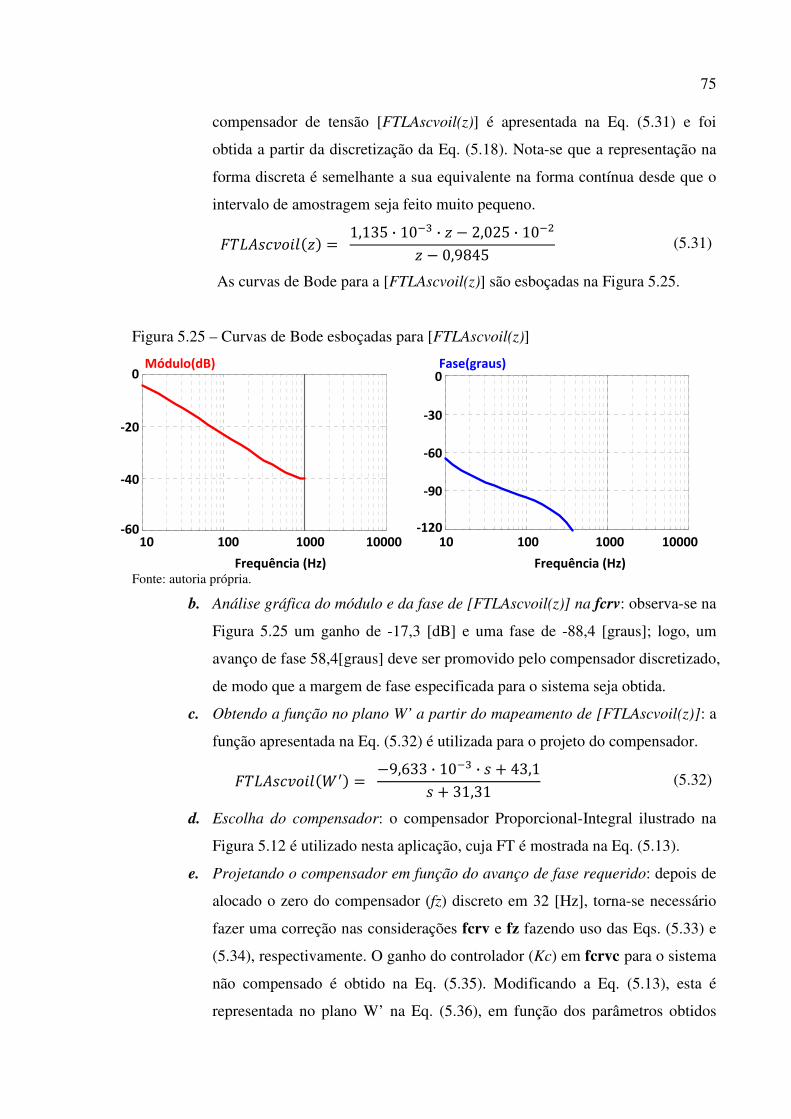
75
compensador de tensão [FTLAscvoil(z)] é apresentada na Eq. (5.31) e foi
obtida a partir da discretização da Eq. (5.18). Nota-se que a representação na
forma discreta é semelhante a sua equivalente na forma contínua desde que o
intervalo de amostragem seja feito muito pequeno.
+, /§ 1,135 · 10~V · 2,025 · 10~# 0,9845 (5.31)
As curvas de Bode para a [FTLAscvoil(z)] são esboçadas na Figura 5.25.
Figura 5.25 – Curvas de Bode esboçadas para [FTLAscvoil(z)]
10 100 1000 10000
Frequência (Hz)
10 100 1000 10000
Frequência (Hz)
-20
-40
-60
0Módulo(dB)
0
-30
-60
-90
-120
Fase(graus)
Fonte: autoria própria.
b. Análise gráfica do módulo e da fase de [FTLAscvoil(z)] na fcrv: observa-se na
Figura 5.25 um ganho de -17,3 [dB] e uma fase de -88,4 [graus]; logo, um
avanço de fase 58,4[graus] deve ser promovido pelo compensador discretizado,
de modo que a margem de fase especificada para o sistema seja obtida.
c. Obtendo a função no plano W’ a partir do mapeamento de [FTLAscvoil(z)]: a
função apresentada na Eq. (5.32) é utilizada para o projeto do compensador.
+, /§¬± 9,633 · 10~V · * 43,1 * 31,31 (5.32)
d. Escolha do compensador: o compensador Proporcional-Integral ilustrado na
Figura 5.12 é utilizado nesta aplicação, cuja FT é mostrada na Eq. (5.13).
e. Projetando o compensador em função do avanço de fase requerido: depois de
alocado o zero do compensador (fz) discreto em 32 [Hz], torna-se necessário
fazer uma correção nas considerações fcrv e fz fazendo uso das Eqs. (5.33) e
(5.34), respectivamente. O ganho do controlador (Kc) em fcrvc para o sistema
não compensado é obtido na Eq. (5.35). Modificando a Eq. (5.13), esta é
representada no plano W’ na Eq. (5.36), em função dos parâmetros obtidos
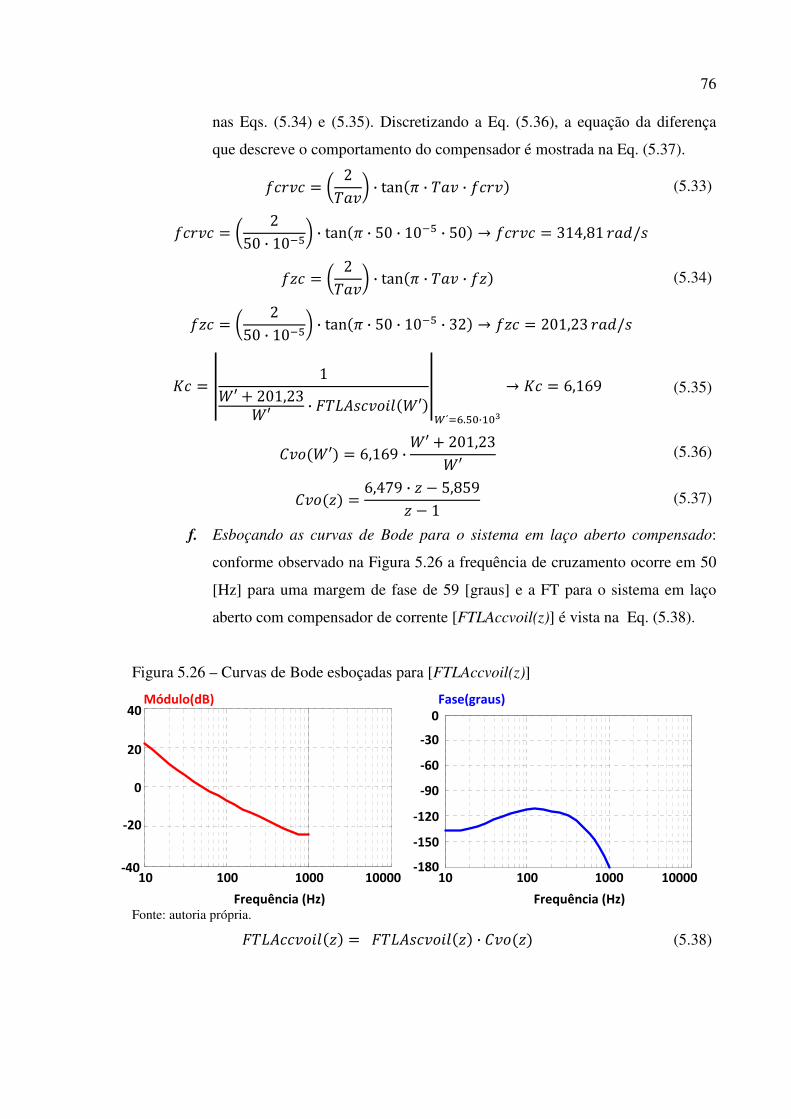
76
nas Eqs. (5.34) e (5.35). Discretizando a Eq. (5.36), a equação da diferença
que descreve o comportamento do compensador é mostrada na Eq. (5.37).
1 2+2 · tanD · + · (5.33)
1 250 · 10~2 · tanD · 50 · 10~ · 50 K 314,81 /
1 2+2 · tanD · + · (5.34)
1 250 · 10~2 · tanD · 50 · 10~ · 32 K 201,23 /
p ¸ 1¬° * 201,23¬° · +, /§¬°¸¹´.b·@b»K p 6,169 (5.35)
Z¬° 6,169 · ¬° * 201,23¬° (5.36)
Z 6,479 · 5,859 1 (5.37)
f. Esboçando as curvas de Bode para o sistema em laço aberto compensado:
conforme observado na Figura 5.26 a frequência de cruzamento ocorre em 50
[Hz] para uma margem de fase de 59 [graus] e a FT para o sistema em laço
aberto com compensador de corrente [FTLAccvoil(z)] é vista na Eq. (5.38).
Figura 5.26 – Curvas de Bode esboçadas para [FTLAccvoil(z)]
10 100 1000 10000
Frequência (Hz)
10 100 1000 10000
Frequência (Hz)
20
0
-20
-40
40Módulo(dB)
0
-30
-60
-90
-150
-180
Fase(graus)
-120
Fonte: autoria própria. +, /§ +, /§ · Z (5.38)
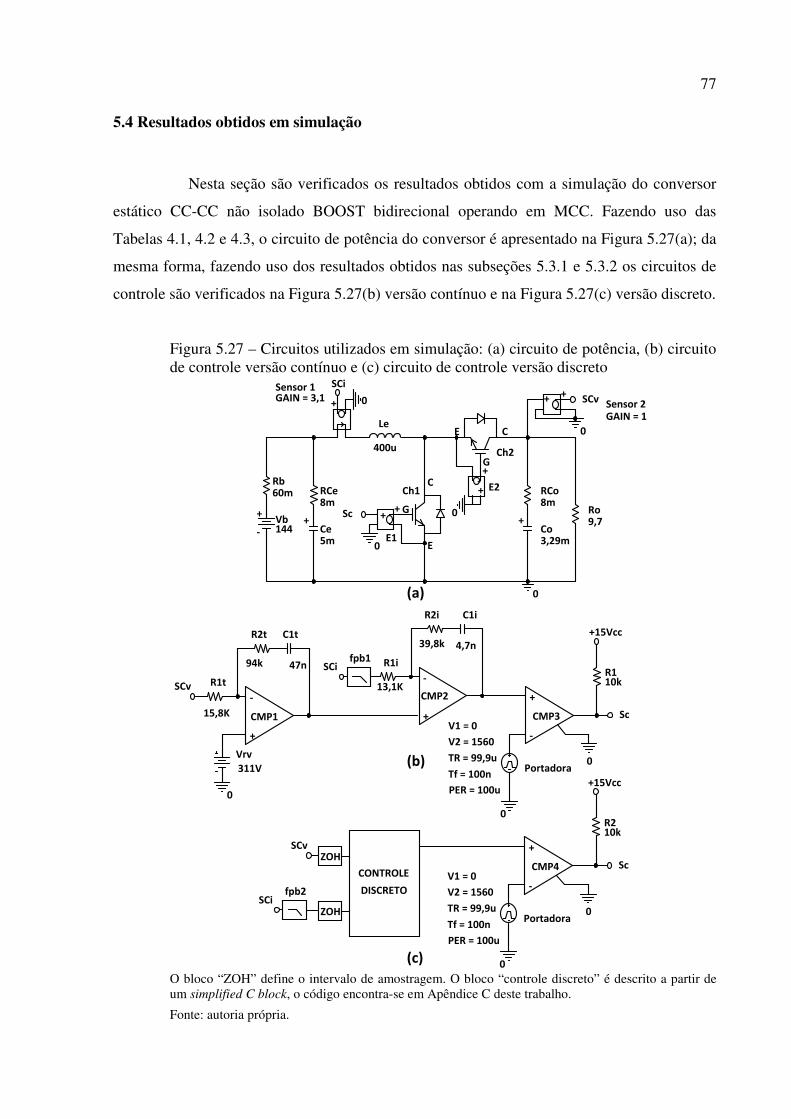
77 5.4 Resultados obtidos em simulação
Nesta seção são verificados os resultados obtidos com a simulação do conversor
estático CC-CC não isolado BOOST bidirecional operando em MCC. Fazendo uso das
Tabelas 4.1, 4.2 e 4.3, o circuito de potência do conversor é apresentado na Figura 5.27(a); da
mesma forma, fazendo uso dos resultados obtidos nas subseções 5.3.1 e 5.3.2 os circuitos de
controle são verificados na Figura 5.27(b) versão contínuo e na Figura 5.27(c) versão discreto.
Figura 5.27 – Circuitos utilizados em simulação: (a) circuito de potência, (b) circuito de controle versão contínuo e (c) circuito de controle versão discreto
++Sensor 2GAIN = 1
SCv
Ch1C
E
Ch2
C
G
E
0
-+
+ E2
0
Co3,29m
RCo8m
Le
400u
0+
Sensor 1GAIN = 3,1
SCi
0
Sc Ro9,7
++Vb
144
Rb60m
Ce5m
RCe8m
0
G+
-+ +
E1
Sc
0
R110k
Tf = 100n
PER = 100u
V1 = 0
TR = 99,9u
V2 = 1560
0
+15Vcc
Portadora
+
-
R1i
13,1K
R2i
39,8k
C1i
4,7n
+
-R1t
15,8K
R2t
94k
C1t
47n
Vrv
311V
0
CMP1
+
-
SCi
CMP2
CMP3
fpb1
SCv
SCvZOH
SCifpb2
ZOH
CONTROLE
DISCRETO
Sc
0
R210k
Tf = 100n
PER = 100u
V1 = 0
TR = 99,9u
V2 = 1560
0
+15Vcc
Portadora
+
-
CMP4
(a)
(b)
(c) O bloco “ZOH” define o intervalo de amostragem. O bloco “controle discreto” é descrito a partir de um simplified C block, o código encontra-se em Apêndice C deste trabalho.
Fonte: autoria própria.
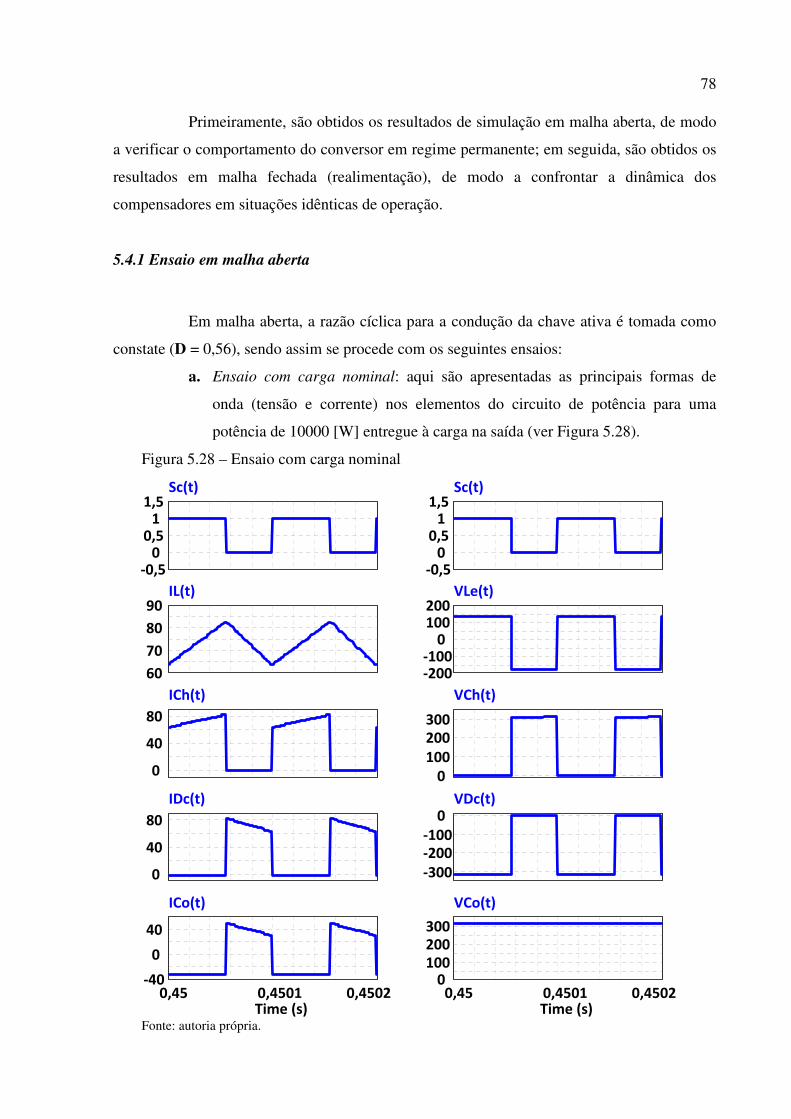
78
Primeiramente, são obtidos os resultados de simulação em malha aberta, de modo
a verificar o comportamento do conversor em regime permanente; em seguida, são obtidos os
resultados em malha fechada (realimentação), de modo a confrontar a dinâmica dos
compensadores em situações idênticas de operação.
5.4.1 Ensaio em malha aberta
Em malha aberta, a razão cíclica para a condução da chave ativa é tomada como
constate (D = 0,56), sendo assim se procede com os seguintes ensaios:
a. Ensaio com carga nominal: aqui são apresentadas as principais formas de
onda (tensão e corrente) nos elementos do circuito de potência para uma
potência de 10000 [W] entregue à carga na saída (ver Figura 5.28).
Figura 5.28 – Ensaio com carga nominal
0-0,5
0,51
1,5Sc(t)
60
70
80
90IL(t)
0
40
80
ICh(t)
0
40
80
IDc(t)
0,45 0,4501 0,4502Time (s)
0
-40
40
ICo(t)
0-0,5
0,51
1,5Sc(t)
0-100-200
100200
VLe(t)
0
100
200300
VCh(t)
0
-100-200
-300
VDc(t)
0,45 0,4501 0,4502Time (s)
0100200300
VCo(t)
Fonte: autoria própria.
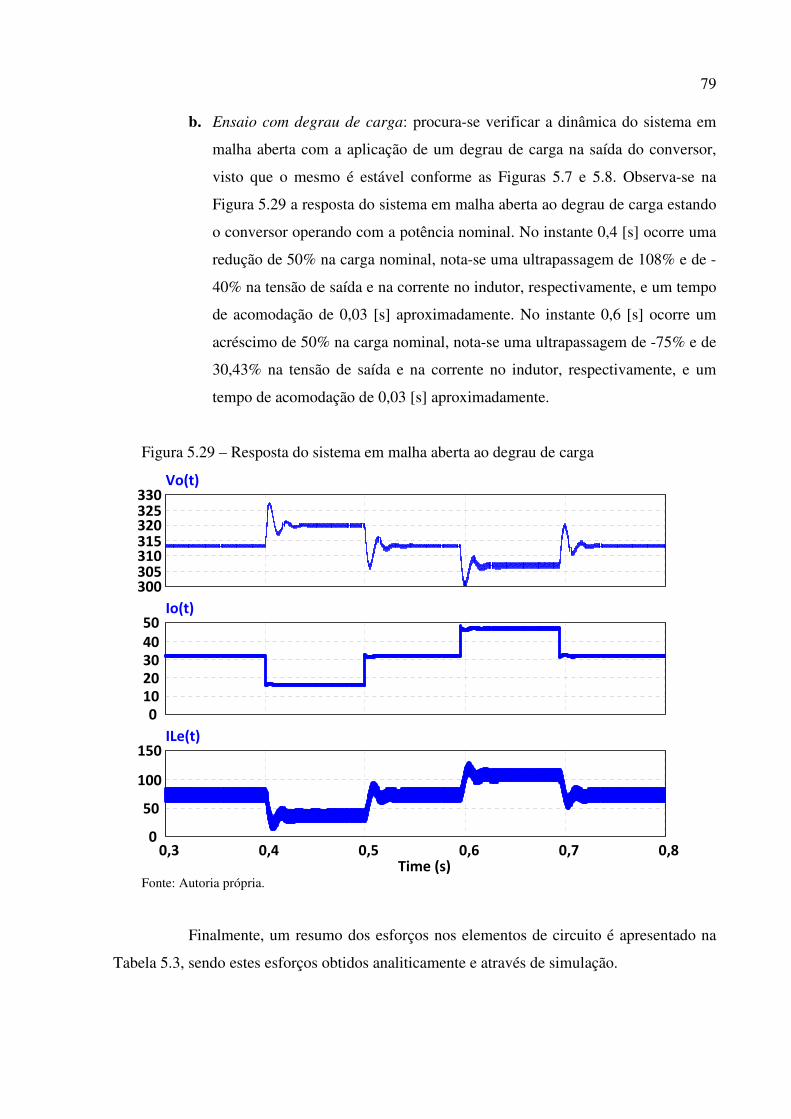
79
b. Ensaio com degrau de carga: procura-se verificar a dinâmica do sistema em
malha aberta com a aplicação de um degrau de carga na saída do conversor,
visto que o mesmo é estável conforme as Figuras 5.7 e 5.8. Observa-se na
Figura 5.29 a resposta do sistema em malha aberta ao degrau de carga estando
o conversor operando com a potência nominal. No instante 0,4 [s] ocorre uma
redução de 50% na carga nominal, nota-se uma ultrapassagem de 108% e de -
40% na tensão de saída e na corrente no indutor, respectivamente, e um tempo
de acomodação de 0,03 [s] aproximadamente. No instante 0,6 [s] ocorre um
acréscimo de 50% na carga nominal, nota-se uma ultrapassagem de -75% e de
30,43% na tensão de saída e na corrente no indutor, respectivamente, e um
tempo de acomodação de 0,03 [s] aproximadamente.
Figura 5.29 – Resposta do sistema em malha aberta ao degrau de carga
300305310315320325330
Vo(t)
010203040
50Io(t)
0,3 0,4 0,5 0,6 0,7 0,8Time (s)
0
50
100
150ILe(t)
Fonte: Autoria própria.
Finalmente, um resumo dos esforços nos elementos de circuito é apresentado na
Tabela 5.3, sendo estes esforços obtidos analiticamente e através de simulação.
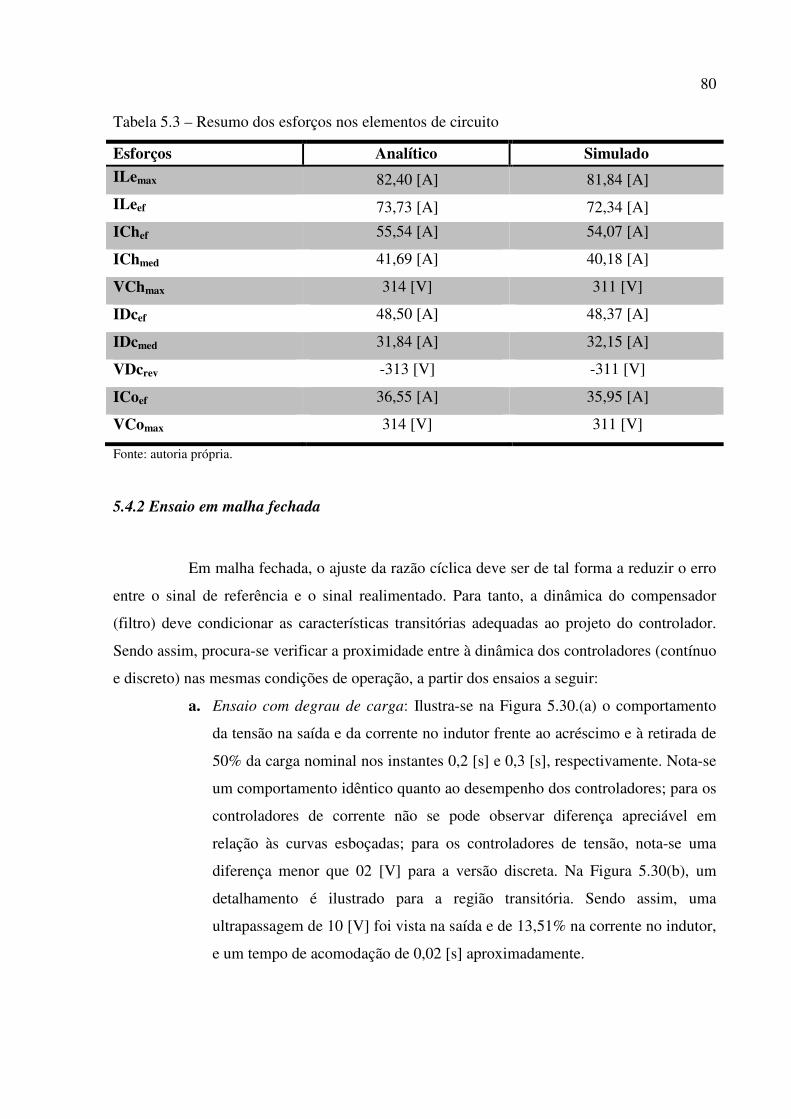
80 Tabela 5.3 – Resumo dos esforços nos elementos de circuito
Esforços Analítico Simulado
ILemax 82,40 [A] 81,84 [A]
ILeef 73,73 [A] 72,34 [A]
IChef 55,54 [A] 54,07 [A]
IChmed 41,69 [A] 40,18 [A]
VChmax 314 [V] 311 [V]
IDcef 48,50 [A] 48,37 [A]
IDcmed 31,84 [A] 32,15 [A]
VDcrev -313 [V] -311 [V]
ICoef 36,55 [A] 35,95 [A]
VComax 314 [V] 311 [V]
Fonte: autoria própria.
5.4.2 Ensaio em malha fechada
Em malha fechada, o ajuste da razão cíclica deve ser de tal forma a reduzir o erro
entre o sinal de referência e o sinal realimentado. Para tanto, a dinâmica do compensador
(filtro) deve condicionar as características transitórias adequadas ao projeto do controlador.
Sendo assim, procura-se verificar a proximidade entre à dinâmica dos controladores (contínuo
e discreto) nas mesmas condições de operação, a partir dos ensaios a seguir:
a. Ensaio com degrau de carga: Ilustra-se na Figura 5.30.(a) o comportamento
da tensão na saída e da corrente no indutor frente ao acréscimo e à retirada de
50% da carga nominal nos instantes 0,2 [s] e 0,3 [s], respectivamente. Nota-se
um comportamento idêntico quanto ao desempenho dos controladores; para os
controladores de corrente não se pode observar diferença apreciável em
relação às curvas esboçadas; para os controladores de tensão, nota-se uma
diferença menor que 02 [V] para a versão discreta. Na Figura 5.30(b), um
detalhamento é ilustrado para a região transitória. Sendo assim, uma
ultrapassagem de 10 [V] foi vista na saída e de 13,51% na corrente no indutor,
e um tempo de acomodação de 0,02 [s] aproximadamente.
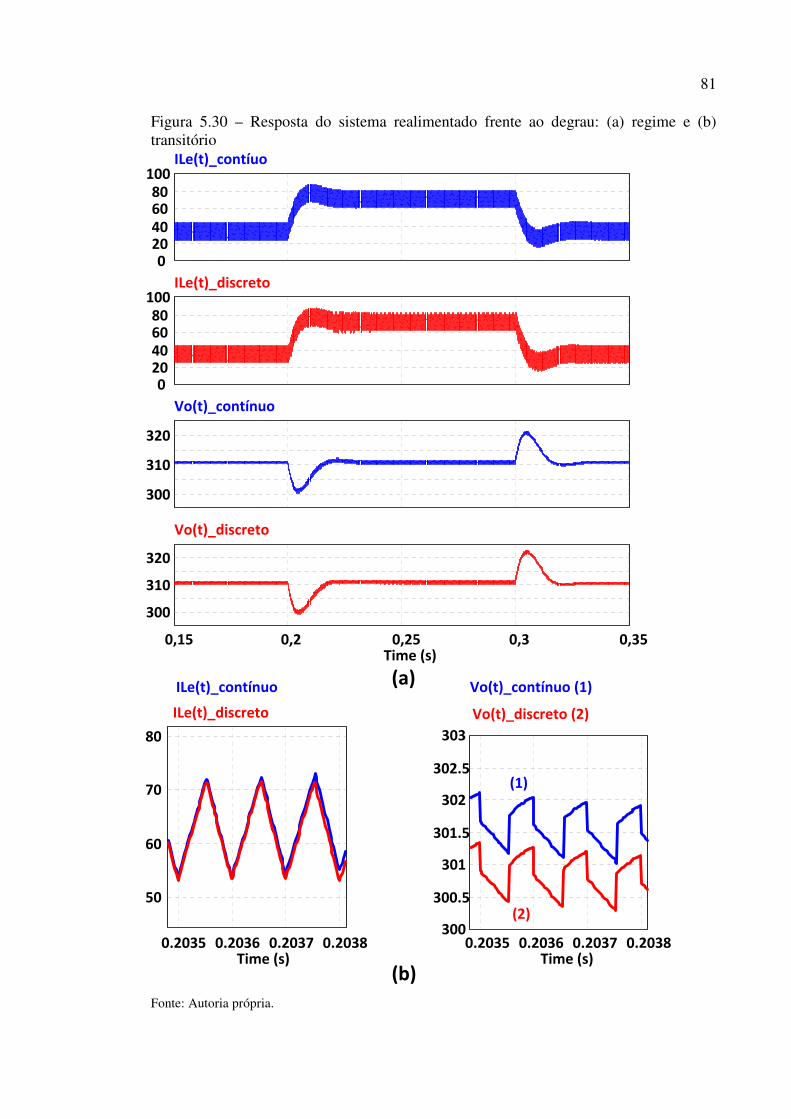
81
Figura 5.30 – Resposta do sistema realimentado frente ao degrau: (a) regime e (b) transitório
020406080
100ILe(t)_contíuo
020406080
100ILe(t)_discreto
300
310
320
Vo(t)_contínuo
0,15 0,2 0,25 0,3 0,35Time (s)
300
310
320
Vo(t)_discreto
50
60
70
80
ILe(t)_contínuo
ILe(t)_discreto
0.2035 0.2036 0.2037 0.2038Time (s)
300
300.5
301
301.5
302
302.5
303
Vo(t)_contínuo (1)
Vo(t)_discreto (2)
0.2035 0.2036 0.2037 0.2038Time (s)
(1)
(2)
(a)
(b) Fonte: Autoria própria.
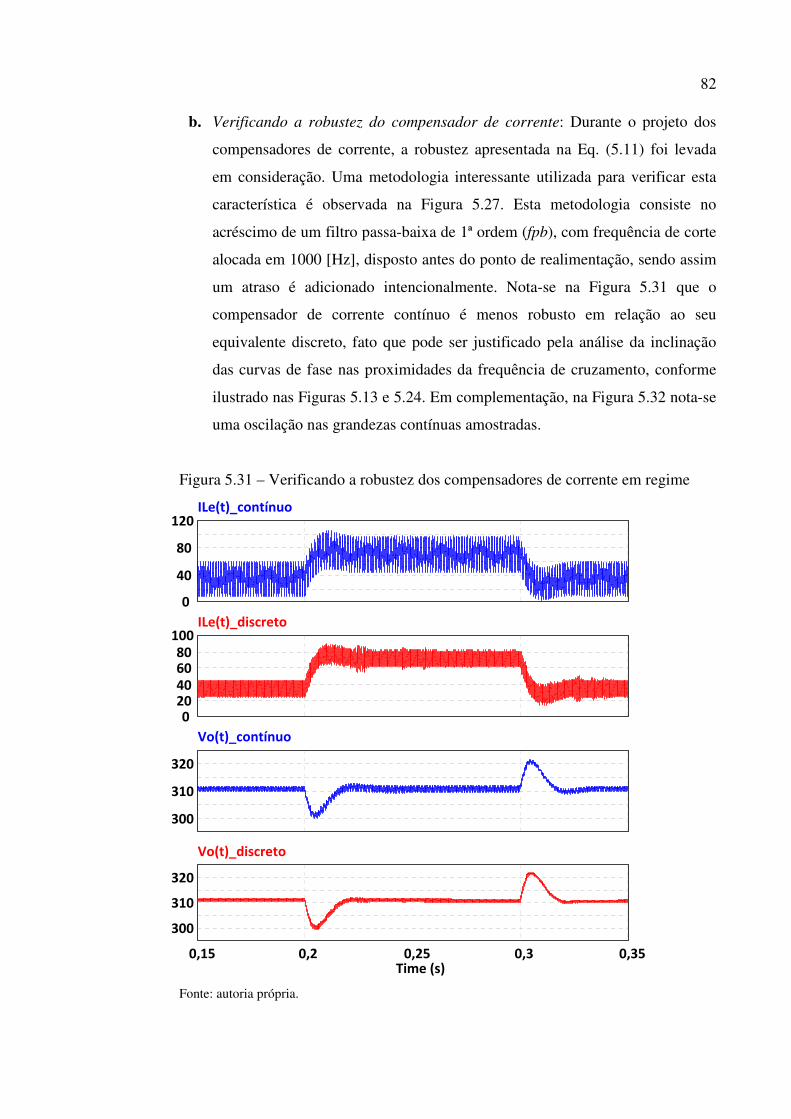
82
b. Verificando a robustez do compensador de corrente: Durante o projeto dos
compensadores de corrente, a robustez apresentada na Eq. (5.11) foi levada
em consideração. Uma metodologia interessante utilizada para verificar esta
característica é observada na Figura 5.27. Esta metodologia consiste no
acréscimo de um filtro passa-baixa de 1ª ordem (fpb), com frequência de corte
alocada em 1000 [Hz], disposto antes do ponto de realimentação, sendo assim
um atraso é adicionado intencionalmente. Nota-se na Figura 5.31 que o
compensador de corrente contínuo é menos robusto em relação ao seu
equivalente discreto, fato que pode ser justificado pela análise da inclinação
das curvas de fase nas proximidades da frequência de cruzamento, conforme
ilustrado nas Figuras 5.13 e 5.24. Em complementação, na Figura 5.32 nota-se
uma oscilação nas grandezas contínuas amostradas.
Figura 5.31 – Verificando a robustez dos compensadores de corrente em regime
0
40
80
120ILe(t)_contínuo
020406080
100ILe(t)_discreto
300
310
320
Vo(t)_contínuo
0,15 0,2 0,25 0,3 0,35Time (s)
300
310
320
Vo(t)_discreto
Fonte: autoria própria.
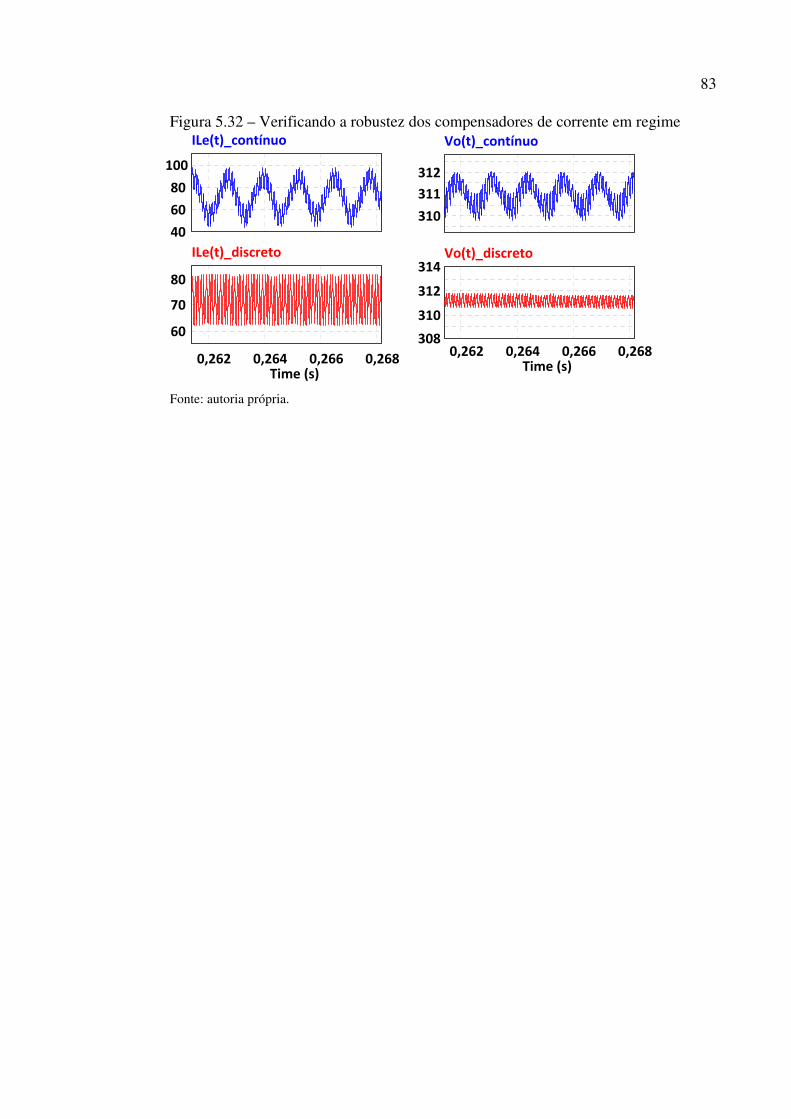
83
Figura 5.32 – Verificando a robustez dos compensadores de corrente em regime
40
60
80
100
ILe(t)_contínuo
60
70
80
ILe(t)_discreto
310
311
312
Vo(t)_contínuo
0,262 0,264 0,266 0,268Time (s)
308
310
312
314Vo(t)_discreto
0,262 0,264 0,266 0,268Time (s)
Fonte: autoria própria.
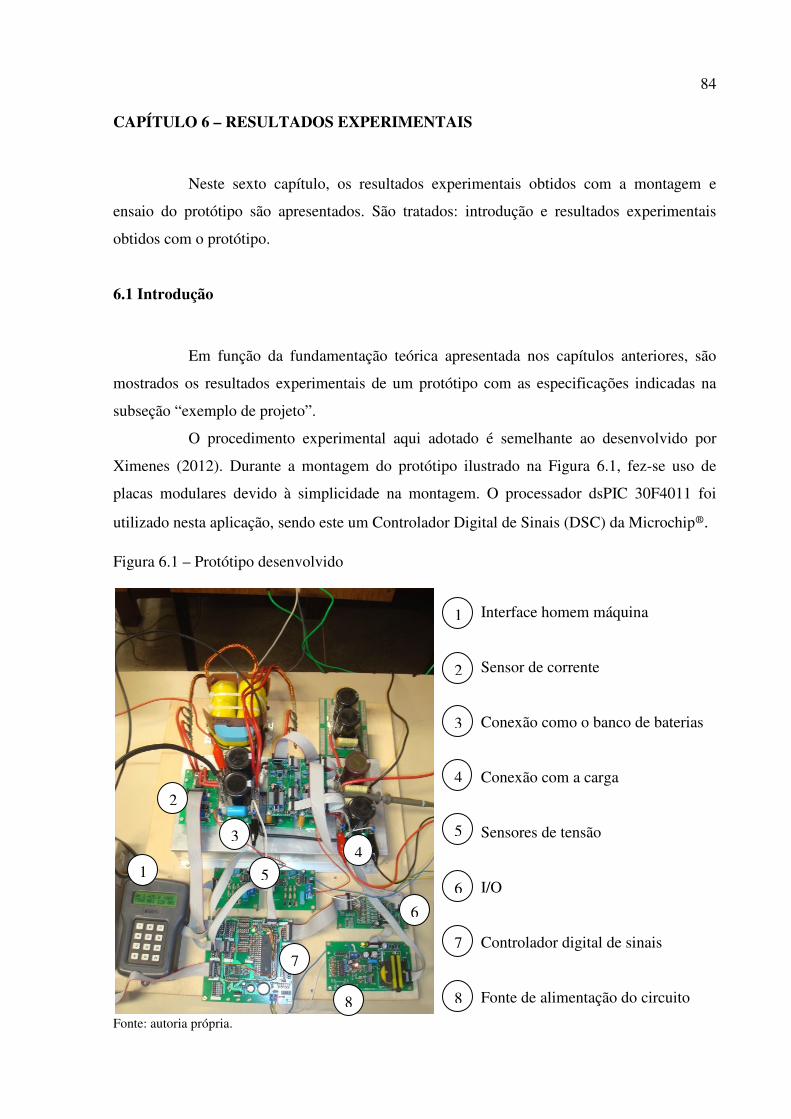
84 CAPÍTULO 6 – RESULTADOS EXPERIMENTAIS
Neste sexto capítulo, os resultados experimentais obtidos com a montagem e
ensaio do protótipo são apresentados. São tratados: introdução e resultados experimentais
obtidos com o protótipo.
6.1 Introdução
Em função da fundamentação teórica apresentada nos capítulos anteriores, são
mostrados os resultados experimentais de um protótipo com as especificações indicadas na
subseção “exemplo de projeto”.
O procedimento experimental aqui adotado é semelhante ao desenvolvido por
Ximenes (2012). Durante a montagem do protótipo ilustrado na Figura 6.1, fez-se uso de
placas modulares devido à simplicidade na montagem. O processador dsPIC 30F4011 foi
utilizado nesta aplicação, sendo este um Controlador Digital de Sinais (DSC) da Microchip®.
Figura 6.1 – Protótipo desenvolvido
Interface homem máquina
Sensor de corrente
Conexão como o banco de baterias
Conexão com a carga
Sensores de tensão
I/O
Controlador digital de sinais
Fonte de alimentação do circuito
Fonte: autoria própria.
1
2
3 4
5
7
6
1
2
3
4
5
6
7
8 8
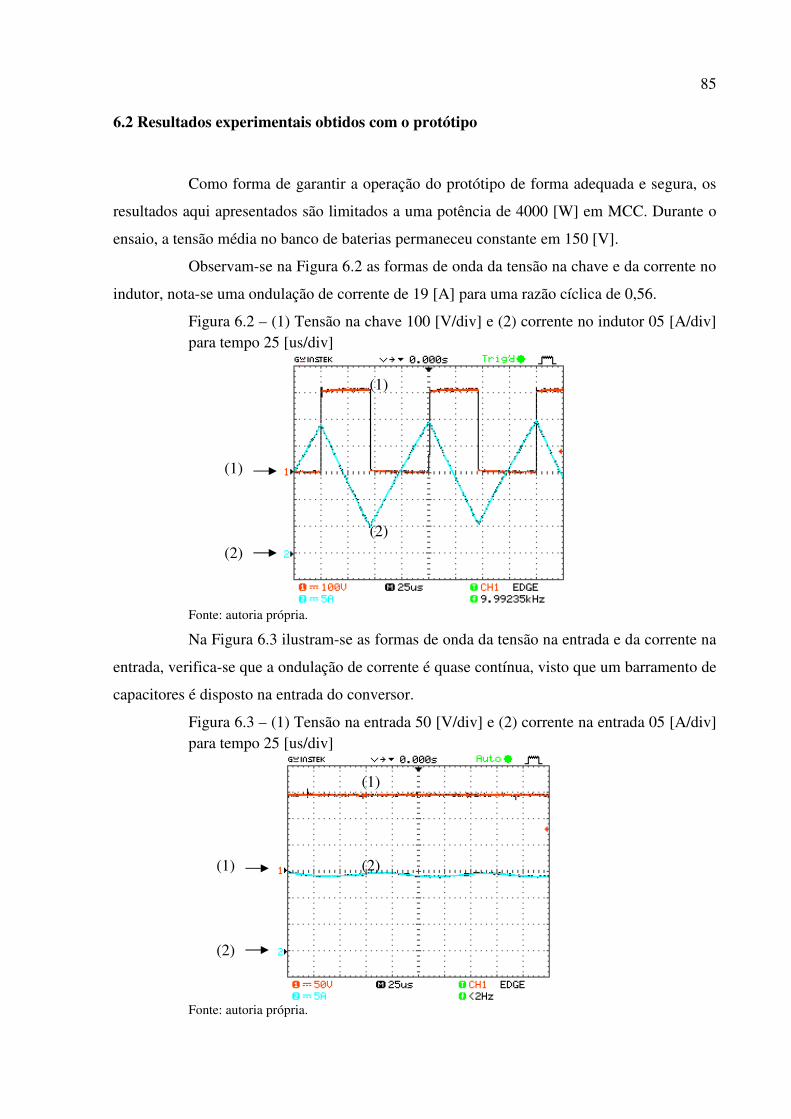
85 6.2 Resultados experimentais obtidos com o protótipo
Como forma de garantir a operação do protótipo de forma adequada e segura, os
resultados aqui apresentados são limitados a uma potência de 4000 [W] em MCC. Durante o
ensaio, a tensão média no banco de baterias permaneceu constante em 150 [V].
Observam-se na Figura 6.2 as formas de onda da tensão na chave e da corrente no
indutor, nota-se uma ondulação de corrente de 19 [A] para uma razão cíclica de 0,56.
Figura 6.2 – (1) Tensão na chave 100 [V/div] e (2) corrente no indutor 05 [A/div] para tempo 25 [us/div]
Fonte: autoria própria.
Na Figura 6.3 ilustram-se as formas de onda da tensão na entrada e da corrente na
entrada, verifica-se que a ondulação de corrente é quase contínua, visto que um barramento de
capacitores é disposto na entrada do conversor.
Figura 6.3 – (1) Tensão na entrada 50 [V/div] e (2) corrente na entrada 05 [A/div] para tempo 25 [us/div]
Fonte: autoria própria.
(1)
(2)
(1)
(2)
(1)
(2)
(1)
(2)
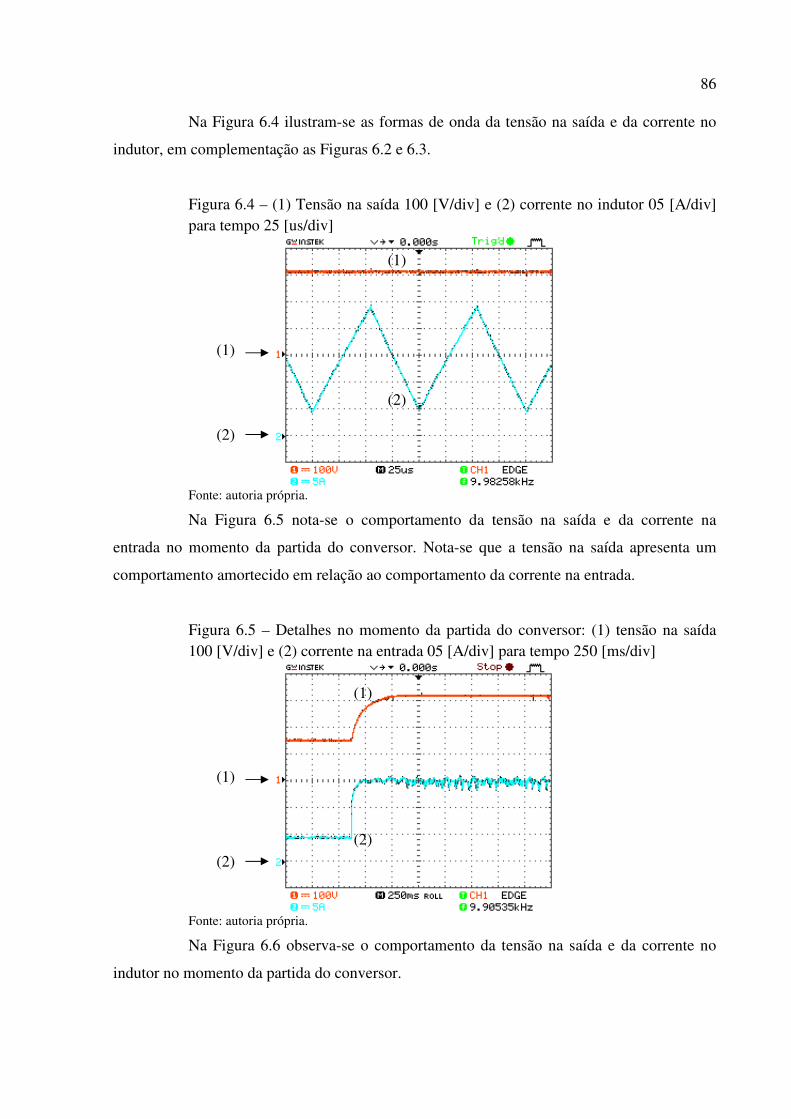
86
Na Figura 6.4 ilustram-se as formas de onda da tensão na saída e da corrente no
indutor, em complementação as Figuras 6.2 e 6.3.
Figura 6.4 – (1) Tensão na saída 100 [V/div] e (2) corrente no indutor 05 [A/div] para tempo 25 [us/div]
Fonte: autoria própria.
Na Figura 6.5 nota-se o comportamento da tensão na saída e da corrente na
entrada no momento da partida do conversor. Nota-se que a tensão na saída apresenta um
comportamento amortecido em relação ao comportamento da corrente na entrada.
Figura 6.5 – Detalhes no momento da partida do conversor: (1) tensão na saída 100 [V/div] e (2) corrente na entrada 05 [A/div] para tempo 250 [ms/div]
Fonte: autoria própria.
Na Figura 6.6 observa-se o comportamento da tensão na saída e da corrente no
indutor no momento da partida do conversor.
(1)
(2)
(1)
(2)
(1)
(2)
(1)
(2)
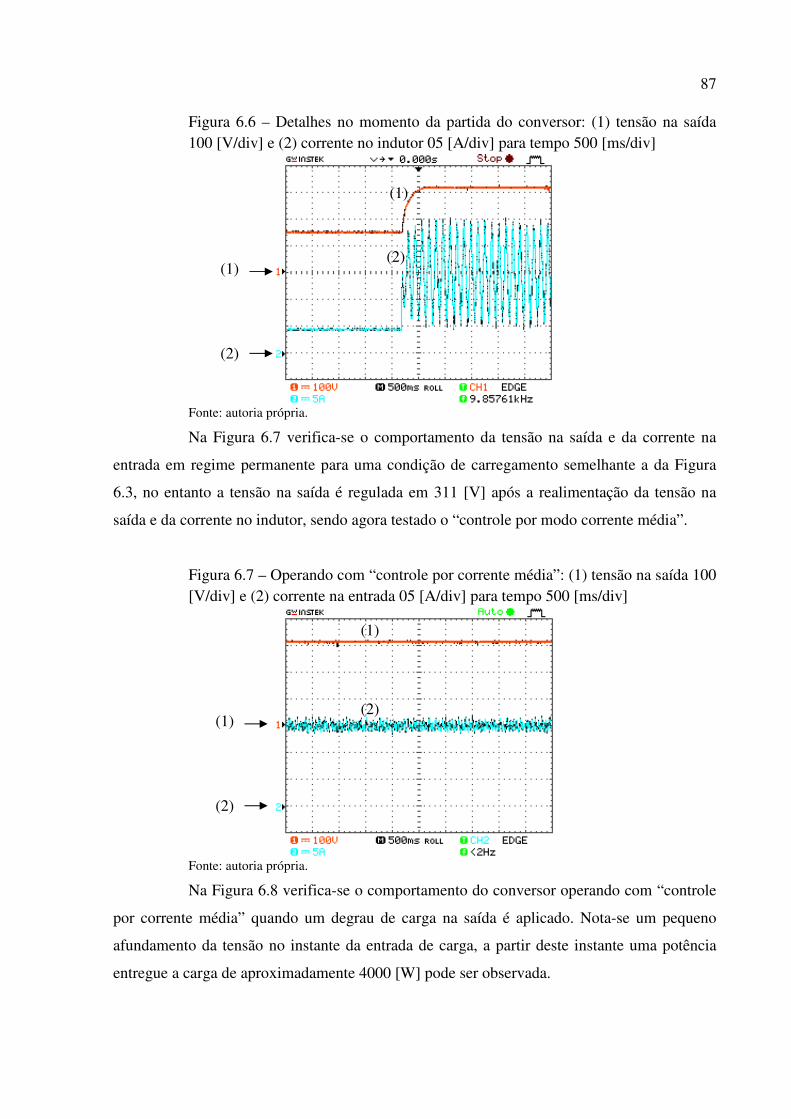
87
Figura 6.6 – Detalhes no momento da partida do conversor: (1) tensão na saída 100 [V/div] e (2) corrente no indutor 05 [A/div] para tempo 500 [ms/div]
Fonte: autoria própria.
Na Figura 6.7 verifica-se o comportamento da tensão na saída e da corrente na
entrada em regime permanente para uma condição de carregamento semelhante a da Figura
6.3, no entanto a tensão na saída é regulada em 311 [V] após a realimentação da tensão na
saída e da corrente no indutor, sendo agora testado o “controle por modo corrente média”.
Figura 6.7 – Operando com “controle por corrente média”: (1) tensão na saída 100 [V/div] e (2) corrente na entrada 05 [A/div] para tempo 500 [ms/div]
Fonte: autoria própria.
Na Figura 6.8 verifica-se o comportamento do conversor operando com “controle
por corrente média” quando um degrau de carga na saída é aplicado. Nota-se um pequeno
afundamento da tensão no instante da entrada de carga, a partir deste instante uma potência
entregue a carga de aproximadamente 4000 [W] pode ser observada.
(1)
(2)
(1)
(2)
(1)
(2)
(1)
(2)
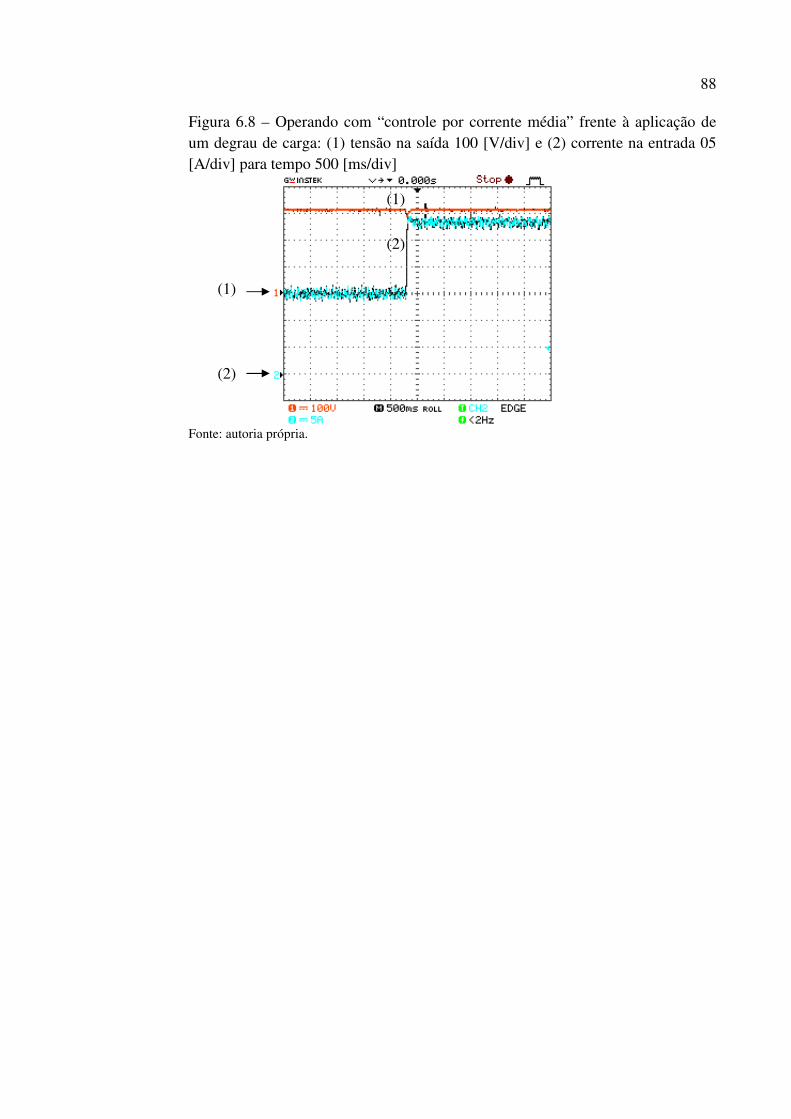
88
Figura 6.8 – Operando com “controle por corrente média” frente à aplicação de um degrau de carga: (1) tensão na saída 100 [V/div] e (2) corrente na entrada 05 [A/div] para tempo 500 [ms/div]
Fonte: autoria própria.
(1)
(2)
(1)
(2)
89 CONSIDERAÇÕES FINAIS
Neste trabalho, o projeto de um módulo de potência, envolvendo o uso de uma
topologia de conversor estático CC-CC básico não isolado a ser integrado ao Veículo Elétrico
(EV) em estudo, foi montado e testado. Com o andamento desta pesquisa, todos os objetivos
específicos listados no capítulo 1 foram confirmados em cumprimento do objetivo geral.
Situando o contexto desta pesquisa no estado da arte atual, uma discussão
fundamentada no tema “eletrificação no setor de transporte” foi proposta no capítulo 2. Ao
longo do texto, diversas referências são apresentadas e diversos subtemas são trabalhados, de
modo a justificar a importância da eletrificação em diferentes aspectos sócio-culturais, no
fortalecimento e na motivação deste trabalho.
A fundamentação teórica inerente aos elementos (elétrico e mecânico), que
compõem o sistema de acionamento do veículo, é desenvolvida no capítulo 3 como forma de
mitigar a energia necessária para a locomoção do veículo. Esta análise é necessária, visto que
os conversores de potência devem ser especificados para as condições mais desfavoráveis de
operação. Sendo assim, as especificações do conversor CC-CC a ser desenvolvido são obtidas.
A topologia de conversor estático CC-CC não isolado BOOST bidirecional foi
escolhida em função da dualidade entre as topologias BUCK e BOOST e das características
favoráveis de ganho estático conseguido. Sendo assim, um estudo qualitativo e quantitativo é
apresentado no capítulo 4, juntamente com a análise dos esforços e das perdas necessários
para a especificação dos componentes comerciais da montagem do protótipo em escala real.
No capítulo 5, como forma de obter um modelo matemático capaz de modelar a
dinâmica de algumas variáveis inerentes à topologia de conversor CC-CC em MCC, fez-se
uso da técnica de linearização denominada “chave PWM”, que se mostrou bastante simples.
Estes modelos foram obtidos analiticamente e validados em simulação. O projeto do
controlador descrito faz uso destes modelos, de modo que a técnica “controle por modo
corrente média” foi implementada; sendo assim, duas representações para o elemento de
compensação foram obtidas: versão contínua e versão discreto.
Os resultados obtidos em simulação e apresentados no capítulo 6 validaram a
fundamentação teórica dos capítulos 4 e 5. Em malha aberta, as formas de onda e os esforços
obtidos estão em conformidade com a teoria apresentada. Em malha fechada, verificou-se que
o desempenho obtido para as duas representações de controladores é idêntico; no entanto
quando o critério de robustez é observado para a malha de corrente, nota-se que a versão
90 discreto é mais robusta frente a perturbações em relação à versão contínua, fato que pode ser
justificado pela inclinação da curva de fase nas proximidades da frequência de corte adotada.
Por fim, os testes em laboratório apresentados no capítulo 6 foram realizados com
uma potência abaixo da potência real, para a qual o protótipo foi especificado, em decorrência
das limitações físicas para a realização dos ensaios em um nível de potência considerada.
Durante os ensaios uma potência acima de 2000 [W] foi utilizada, de modo que o conversor
continuou a operar em MCC. Sendo assim, os resultados obtidos estão em conformidade com
o estudo teórico e prático tratados nesta pesquisa.
São apresentadas a seguir algumas possíveis sugestões a trabalhos futuros em
ordem de prioridade:
• Propor uma metodologia prática para melhorar e ajustar a dinâmica dos
compensadores reais em linhas de código de programação;
• Propor o uso de outras estratégias de compensação;
• Ensaiar o protótipo nas condições nominais;
• Implementar o modo BUCK; e
• Integrar o protótipo ao veículo elétrico batizado de “Patativa”.
91
REFERÊNCIAS
APOLINÁRIO, Mário. Modelagem e simulação de uma fonte de alimentação chaveada. 2012. 145p. Monografia (Tecnólogo em Mecatrônica Industrial) – Instituto Federal de Educação Ciência e Tecnologia do Ceará, Fortaleza, Brasil, 2012.
BARBI, Ivo; MARTINS, Denizar. Conversores CC-CC Básicos não Isolados. 3. ed. Florianópolis, SC: Edição do Autor, 2008.
BATISTA, Fábio. Modulação vetorial aplicada a retificadores trifásicos PWM unidirecionais. 2006. 297p. Tese (Doutor em Engenharia Elétrica) – Programa de Pós-Graduação em Engenharia Elétrica da Universidade Federal de Santa Catarina, Florianópolis, Brasil, 2006.
BLUNDELL, Mike; HARTY, Damian. The Multibody Systems Approach to Vehicle Dynamics. 1. ed. USA, New York: Elsevier, 2004.
BOSCH, Robert. Bosch Automotive Handbook. 1. ed. German, Stuttgart: Society of Automotive Engineers, 2002.
BROOKER, W.; THORNTON, M.; RUGH, J. Technology Improvement Pathways to Cost-Effective Vehicle Electrification. CONFERENCE PAPER, NREL/CP – 540-47454. USA, NREL - National Renewable Energy Laboratory, Feb. 2010.
BROOKS, Alec; GAGE, Tom. Integration of Electric Drive Vehicles with the Electric Power Grid – a New Value Stream. AC Propulsion. EVs 18. Berlin, 2001.
DAHER, Sérgio. Analysis, Design and Implementation of a High Efficiency Multilevel Converter for a Renewable Energy Systems. 2006. 147p. Tese (Doctor in Engineering) – Institut für Elektrische Energietechnik Rationelle Energiewandlung Fachbereich Elektrotechnik/ Informatik Universität Kassel, Kassel, Germany, 2006.
DAHER, Sérgio; et al. VPE20-BR: Veículo Puramente Elétrico com autonomia de 20 km - Brasileiro. 2009. Banner. Material apresentado em aula de graduação do Curso de Engenharia Elétrica da Universidade Federal do Ceará.
DUVALL, Draft. Discussion of the benefits and impacts of plug-in hybrid and battery electric vehicles. In: THE ELECTRIFICATION OF THE TRANSPORTATION SYSTEM: ISSUES AND OPPORTUNITIES, 2010, Massachusetts: Simpósio… Massachusetts: MITEI (The Massachusetts Institute of Technology Energy Initiative), 2010, p. 94-117.
EHSANI, Mehrdad; et al. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles: Fundamentals, Theory, and Design. 2. ed. USA, New York: CRC Press LLC, 2010.
ELECTRIC TRANSPORTATION APPLICATIONS. Urban electric vehicle (UEV) technical specifications. Effective 1 Jan. 2003. Disponível em: <ww1.eere.energy.gov/vehiclesandfuels/avta/pdfs/uev/eva/uev_tech_specs.pdf>. Acesso em: 20 Mar. 2013.
92
EPCOS®. Datasheet: Snap-in capacitors B43501. Oct. 2007. Disponível em:
<http://www.epcos.com>. Acesso em: 03 Ago. 2012.
ERICKSON, Robert; MAKSIMOVIÉ, Dragan. Fundamental of Power Electronics. 2. ed. USA, New York: Kluwer Academic/Plenum Publishers, 2000.
EIA. International Energy Outlook 2011. U.S. Energy Information Administration. Disponível em: < http://www.eia.doe.gov/oiaf/ieo/pdf/ieolecon.pdf/ >. Acesso em: 6 dez. 2012.
ETA NTP002: implementation of SAE standard J1666 may 93. Rev. 3, Effective 1 Dec. 2004. Disponível em: <http://www1.eere.energy.gov/vehiclesandfuels/avta/pdfs/ nev/ntp002.pdf>. Acesso em: 20 Mar. 2013.
ETA UTP002: implementation of SAE standard J1666 may 93. Rev. 0, Effective 23 Mar. 2001. Disponível em: < http://www1.eere.energy.gov/vehiclesandfuels/avta/pdfs/ uev/eva/etautp2r0.pdf >. Acesso em: 20 Mar. 2013.
ETA UTP004: electric vehicle constant speed range tests. Rev. 0, Effective 23 Mar. 2001. Disponível em: <http://www1.eere.energy.gov/vehiclesandfuels/avta/pdfs/ uev/eva/etautp4r0.pdf>. Acesso em: 20 Mar. 2013.
FEITOSA, Luiz. Patativa do Assaré: Trajetória de um Canto. Coleção Ensaios Transversais. São Paulo, SP: Editora Escrituras, 2003.
FRANKLIN, Gene et al. Digital control of dynamic systems. 3. ed. CA, Half Moon Bay: Ellis-Kagle Press, 2006.
GARCERÁ, Gabriel. et al. Novel three-controller average current mode control of DC-DC PWM converters with Improved robustness and Dynamic Response. IEEE TRANSACTIONS ON POWER ELECTRONICS SYSTEMS, v.15, n. 3, p. 516-528, may. 2000.
GILLESPIE, Thomas. Fundamentals of Vehicle Dynamics. USA, Pennsylvania: Society of Automotive Engineers, Inc 1992.
HUSAIN, Iqbal. Electric and hybrid Vehicles: Design fundamentals. 1. ed. USA, New York: CRC Press LLC, 2005.
INTERNATIONAL RECTIFIER®. Application note AN-983: IGBT characteristics.
Jul. 2012. Disponível em: <http://www.irf.com>. Acesso em: 03 Ago. 2012.
INTERNATIONAL RECTIFIER®. Application note AN-990: application
characteristics of IGBT. Jul. 2012. Disponível em: <http://www.irf.com>. Acesso em: 03 Ago. 2012.
INTERNATIONAL RECTIFIER®. Datasheet: IRGP 4063DPbF. Nov. 2006.
Disponível em: <http://www.irf.com>. Acesso em: 03 Ago. 2012.
ISO/RTO COUNCIL. Report: Assessment of Plug-in Electric Vehicle Integration with ISO/RTO Systems. IRC, March, 2010.
93
JAZAR, Reza. Vehicle Dynamics: Theory and Application. USA, New York: Springer Science and Business Media, LLC 2008.
KAZIMIERCZUK, Marian. Pulse-Width Modulated DC-DC Power Converters. 1. ed. USA, Ohio, Wright State University Dayton: John Wiley & Sons, Ltd, 2008.
KLEPL, Martin. Evaluation of digital control law design in the W’-plane. AMERICAN CONTROL CONFERENCE. Seattle, USA. p1471-1474, jun. 1986.
KUTKUT, N. H. et al. Design Considerations for Charge Equalization of an Electric Vehicle Battery System. IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS, v.35, n. 1, p. 28-35, jan. 1999.
MANIKTALA, Sanjaya. Switching Power Supplies A to Z. 1. ed. USA, Burlington: Elsevier/Newnes, 2006.
MARKEL, Tony. Plug-in Electric Vehicle infrastructure: a foundation for electrified transportation. In: THE ELECTRIFICATION OF THE TRANSPORTATION SYSTEM: ISSUES AND OPPORTUNITIES, 2010, Massachusetts: Simpósio… Massachusetts: MITEI (The Massachusetts Institute of Technology Energy Initiative), 2010, p. 126-132.
METGLAS®. Technical Bulletin: High Frequency Distributed gap inductor cores.
2005. Disponível em: <http://www.metglas.com>.
MICROCHIP®. Datasheet: dsPIC 30F4011. Nov. 2010. Disponível em:
<http://www.microchip.com>. Acesso em: 03 Sep. 2013.
MINSK, Ronald. Plugging cars into the grid: why the government should make a choice & policies to promote deployment of grid-enabled vehicles. In: THE ELECTRIFICATION OF THE TRANSPORTATION SYSTEM: ISSUES AND OPPORTUNITIES, 2010, Massachusetts: Simpósio… Massachusetts: MITEI (The Massachusetts Institute of Technology Energy Initiative), 2010, p. 60-93.
OECD MULTILINGUAL SUMMARIES. OECD Environmental Outlook to 2030. Disponível em: < http://www.oecd.org/dataoecd/30/10/40202689.pdf/ >. Acesso em: 6 dez. 2012.
ON SEMICONDUCTOR®. Power factor correction handbook. Rev. 3, Sep. 2007.
Disponível em: <http://onsemi.com>. Acesso em: 03 Jan. 2012.
RASHID, Muhammad. Eletrônica de Potência: Circuitos, Dispositivos e Aplicações. 2. ed. São Paulo, SP: Editora Makron Books do Brasil Editora Ltda, 1996.
ROMM, Joseph. The Car and the Fuel of the Future. ELSEVIER, ENERGY POLICE, n. 34, p. 2609-2614, aug. 2006.
SAE J1666: electric vehicle acceleration, gradeability, and decelaration test procedure. Revised 2002-10-25. Disponível em: <http://standards.sae.org/j1666_200210/>. Acesso em: 20 Mar. 2013.
94
SAE J1772: electric vehicle and plug in hybrid electric vehicle conductive charge coupler. Revised 2012-10-15. Disponível em: <http://standards.sae.org/ j1772_201210/>. Acesso em: 12 Dez. 2012.
SCHÄFER, Andreas; et al. Transportation in a Climate-Constrained World. 1. ed. USA, Massachusetts, Massachusetts Institute of Technology, 2009.
SHORT, W.; DENHOLM, P. A Preliminary Assessment of Plug-In Hybrid Electric Vehicles on Wind Energy Markets. TECHNICAL REPORT, NREL/TP – 620-39729. USA, NREL - National Renewable Energy Laboratory, April, 2006.
SIEMENS®. Catálogo de motores: Motores trifásicos de baixa tensão. Out. 2008.
Disponível em: <http://www.siemens.com.br/motores>. Acesso em: 09 Jul. 2012.
SUNTIO, Teuvo. et al. Dynamic effects of inductor current ripple in peak-current and average-current mode control. IECON’01: THE 27 th ANNUAL CONFERENCE OF THE IEEE INDUSTRIAL ELECTONICS SOCIETY. p. 1072-1077, nov. 2001.
TANG, Wei. et al. Small-signal modeling of average current-mode control. IEEE TRANSACTIONS ON POWER ELECTRONICS SYSTEMS, v.8, n. 2, p. 112-119, april 1993.
THE ELECTRIFICATION OF THE TRANSPORTATION SYSTEM: ISSUES AND OPPORTUNITIES, 2010, Massachusetts: Simpósio… Massachusetts: MITEI (The Massachusetts Institute of Technology Energy Initiative), 2010.
TORRICO BASCOPÉ, Rene. Conversores PWM com controle por modo corrente média (Average current mode control). 2007. Apresentação em Data Show. Material apresentado em aula de pós-graduação do Curso de Engenharia Elétrica da Universidade Federal do Ceará.
UNIVERSIDADE FEDERAL DO CEARÁ. Sistema de bibliotecas. Guia de normalização de trabalhos acadêmicos da Universidade Federal do Ceará. Fortaleza: Ed. UFC, 2013.
VISHAY SEMICONDUCTORS®. Application note 91: IGBT/MOSFET gate drive
optocoupler. Rev 1.3, 24 Oct. 2011. Disponível em: <http://www.vishay.com>. Acesso em: 03 Ago. 2012.
VORPÉRIAN, Vatché. Simplified Analysis of PWM Converters Using Model of PWM Switch, part I: Continuous Conduction Mode. IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS, v.26, n. 3, p. 490-496, mai. 1990.
WONG, Jo. Theory of Ground Vehicles. 3. ed. USA, New York: John Wiley & Sons, Inc 2001.
XIMENES, Saulo. Projeto de um conversor CC-CA trifásico para interligar um sistema fotovoltaico à rede elétrica. 2012. 96p. Dissertação (Mestre em Engenharia Elétrica) – Programa de Pós-Graduação em Engenharia Elétrica da Universidade Federal do Ceará, Fortaleza, Brasil, 2012.

95
YOONG, M. K. et al. Studies of Regenerative Braking in Electric Vehicle. PROCEEDINGS OF THE 2010 IEEE CONFERENCE ON SUSTAINABLE UTILIZATION AND DEVELOPMENT IN ENGINEERING AND TECHNOLOGY. Malaysia. p. 40-45, nov. 2010.
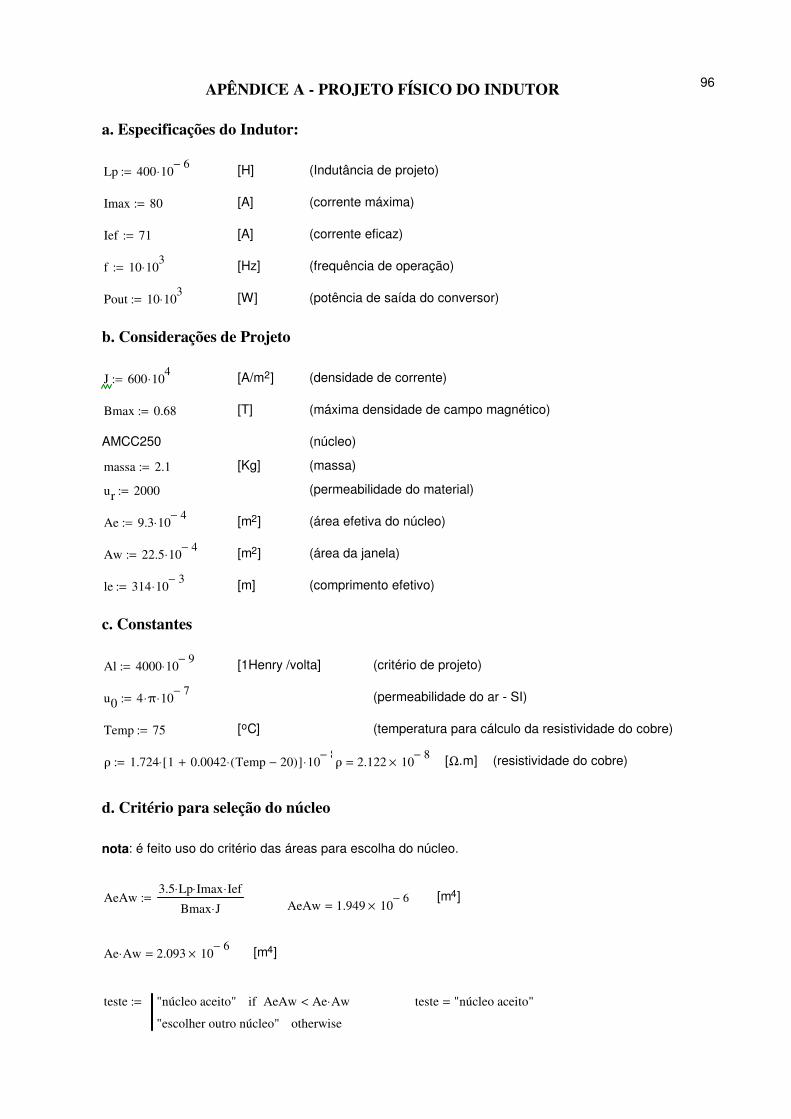
96APÊNDICE A - PROJETO FÍSICO DO INDUTOR
a. Especificações do Indutor:
Lp 400 106−
⋅:= [H] (Indutância de projeto)
Imax 80:= [A] (corrente máxima)
Ief 71:= [A] (corrente eficaz)
f 10 103
⋅:= [Hz] (frequência de operação)
Pout 10 103
⋅:= [W] (potência de saída do conversor)
b. Considerações de Projeto
J 600 104
⋅:= [A/m2] (densidade de corrente)
Bmax 0.68:= [T] (máxima densidade de campo magnético)
AMCC250 (núcleo)
massa 2.1:= [Kg] (massa)
ur 2000:= (permeabilidade do material)
Ae 9.3 104−
⋅:= [m2] (área efetiva do núcleo)
Aw 22.5 104−
⋅:= [m2] (área da janela)
le 314 103−
⋅:= [m] (comprimento efetivo)
c. Constantes
Al 4000 109−
⋅:= [1Henry /volta] (critério de projeto)
u0 4 π⋅ 107−
⋅:= (permeabilidade do ar - SI)
Temp 75:= [oC] (temperatura para cálculo da resistividade do cobre)
ρ 1.724 1 0.0042 Temp 20−( )⋅+[ ]⋅ 108−
⋅:= ρ 2.122 108−
×= [Ω.m] (resistividade do cobre)
d. Critério para seleção do núcleo
nota: é feito uso do critério das áreas para escolha do núcleo.
AeAw3.5 Lp⋅ Imax⋅ Ief⋅
Bmax J⋅:= [m4]
AeAw 1.949 106−
×=
Ae Aw⋅ 2.093 106−
×= [m4]
teste "núcleo aceito" AeAw Ae Aw⋅<if
"escolher outro núcleo" otherwise
:= teste "núcleo aceito"=

97 e. Seleção dos condutores
Cálculo do número de espiras
Np ceilLp Imax⋅
Bmax Ae⋅
:= Np 51= [espiras]
Cálculo do Entreferro Total (considerar o caso do entreferro distribuido)
lg u0 Ae⋅
Np2
Lp
le
ur u0⋅ Ae⋅
−
⋅:=lg 7.442 10
3−
×= [m]
Dimensionamento da seção dos condutores de cobre
AreaCuIef
J:= AreaCu 1.183 10
5−
×= [m2] (seção do condutor para o J especificado)
RaioCu
AreaCu
π10
2⋅:= RaioCu 0.194= [cm] (raio do condutor)
AWG
r 2 RaioCu⋅
2.54
π10
r−
20⋅≤if
r 1 50..∈for:=
AWG 6= (equivalente AWG)
Afio 100 π⋅2.54
2 π⋅10
AWG−
20⋅
2
⋅
:= Afio 12.896= [mm2] (área do fio equivalente em AWG)
Profundidade de penetração
p7.5
f:= p 0.075= [cm]
AWG
r 2 p⋅2.54
π10
r−
20⋅≤if
r 1 50..∈for:=
AWG 18:= (fio de maior seção que pode ser utilizado)
Dimensionamento do enrolamento prático
AWG 25:= (bitola que irá ser utilizada na prática)
Apfio 100 π⋅2.54
2 π⋅10
AWG−
20⋅
2
⋅ 106−
⋅:= Apfio 1.624 107−
×= [m2] (área de cada fio)
Ncp ceilAreaCu
Apfio
:= Ncp 73= (número de fios em paralelo)
Afp Apfio Ncp⋅:= Afp 1.185 105−
×= [m2] (área dos fios em paralelo)
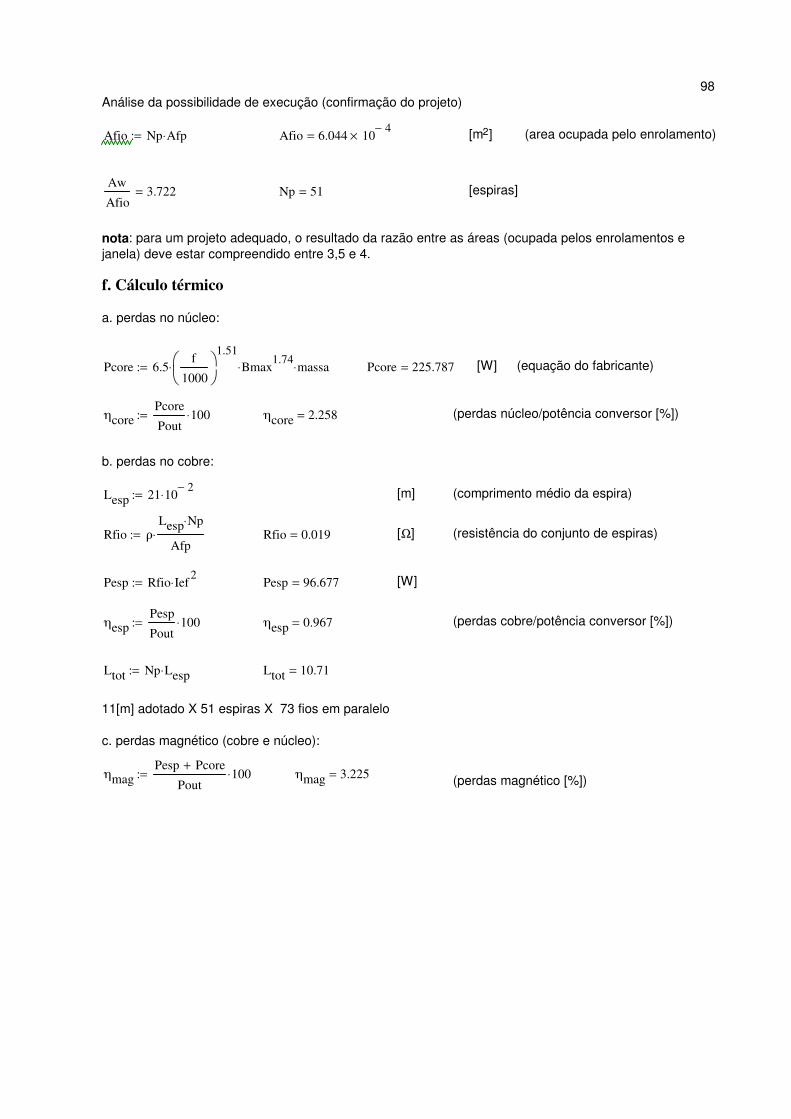
98
Análise da possibilidade de execução (confirmação do projeto)
Afio Np Afp⋅:= Afio 6.044 104−
×= [m2] (area ocupada pelo enrolamento)
Aw
Afio3.722= Np 51= [espiras]
nota: para um projeto adequado, o resultado da razão entre as áreas (ocupada pelos enrolamentos e
janela) deve estar compreendido entre 3,5 e 4.
f. Cálculo térmico
a. perdas no núcleo:
Pcore 6.5f
1000
1.51
⋅ Bmax1.74
⋅ massa⋅:= Pcore 225.787= [W] (equação do fabricante)
ηcorePcore
Pout100⋅:= ηcore 2.258= (perdas núcleo/potência conversor [%])
b. perdas no cobre:
Lesp 21 102−
⋅:= [m] (comprimento médio da espira)
Rfio ρLesp Np⋅
Afp⋅:= Rfio 0.019= [Ω] (resistência do conjunto de espiras)
Pesp Rfio Ief2
⋅:= Pesp 96.677= [W]
ηespPesp
Pout100⋅:= ηesp 0.967= (perdas cobre/potência conversor [%])
Ltot Np Lesp⋅:= Ltot 10.71=
11[m] adotado X 51 espiras X 73 fios em paralelo
c. perdas magnético (cobre e núcleo):
ηmagPesp Pcore+
Pout100⋅:= ηmag 3.225=
(perdas magnético [%])
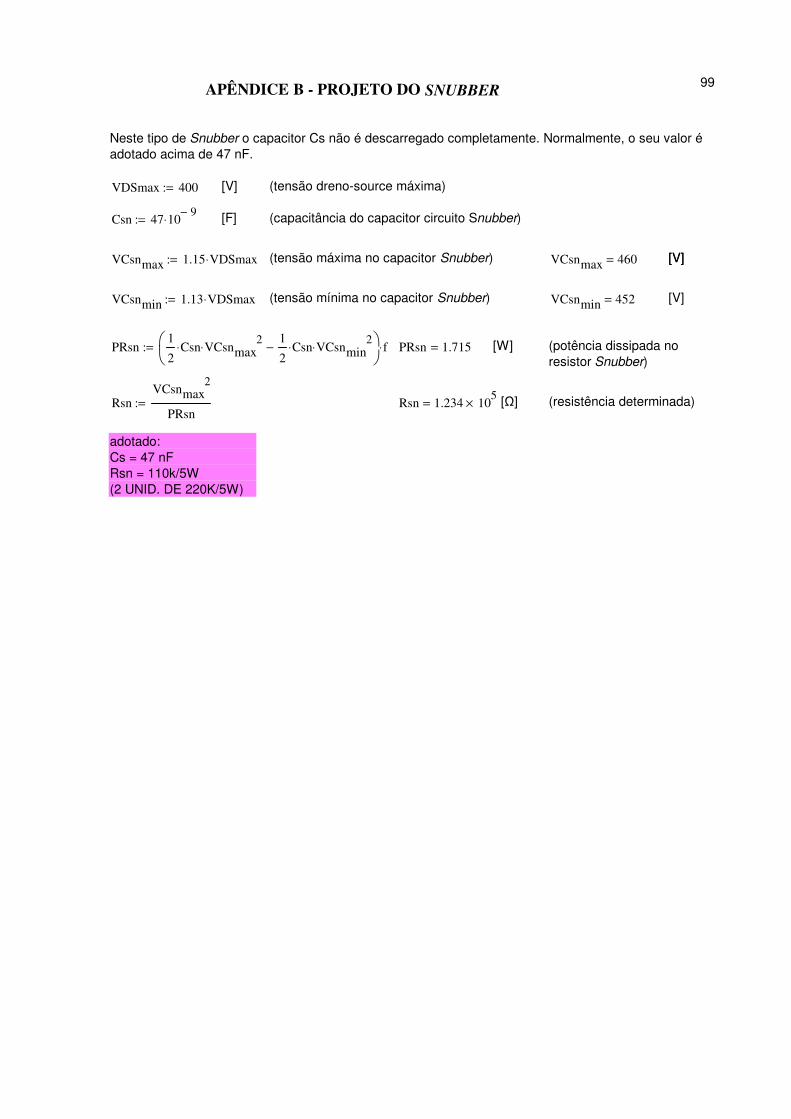
99APÊNDICE B - PROJETO DO SNUBBER
Neste tipo de Snubber o capacitor Cs não é descarregado completamente. Normalmente, o seu valor é
adotado acima de 47 nF.
VDSmax 400:= [V] (tensão dreno-source máxima)
Csn 47 109−
⋅:= [F] (capacitância do capacitor circuito Snubber)
VCsnmax 1.15 VDSmax⋅:= (tensão máxima no capacitor Snubber) VCsnmax 460= [V][V]
VCsnmin 1.13 VDSmax⋅:= (tensão mínima no capacitor Snubber) VCsnmin 452= [V]
PRsn1
2Csn⋅ VCsnmax
2⋅
1
2Csn⋅ VCsnmin
2⋅−
f⋅:= PRsn 1.715= [W] (potência dissipada no
resistor Snubber)
RsnVCsnmax
2
PRsn:= Rsn 1.234 10
5×= [Ω] (resistência determinada)
adotado:
Cs = 47 nF
Rsn = 110k/5W
(2 UNID. DE 220K/5W)
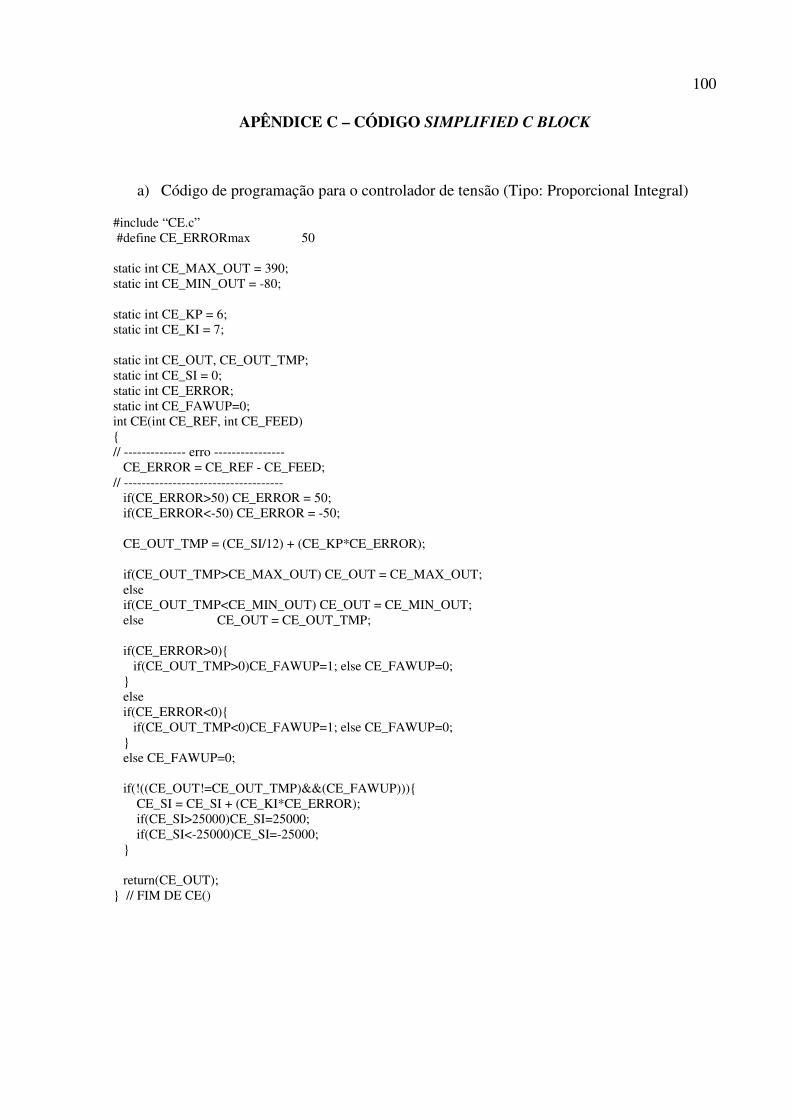
100
APÊNDICE C – CÓDIGO SIMPLIFIED C BLOCK
a) Código de programação para o controlador de tensão (Tipo: Proporcional Integral)
#include “CE.c” #define CE_ERRORmax 50 static int CE_MAX_OUT = 390; static int CE_MIN_OUT = -80; static int CE_KP = 6; static int CE_KI = 7; static int CE_OUT, CE_OUT_TMP; static int CE_SI = 0; static int CE_ERROR; static int CE_FAWUP=0; int CE(int CE_REF, int CE_FEED) // -------------- erro ---------------- CE_ERROR = CE_REF - CE_FEED; // ------------------------------------ if(CE_ERROR>50) CE_ERROR = 50; if(CE_ERROR<-50) CE_ERROR = -50; CE_OUT_TMP = (CE_SI/12) + (CE_KP*CE_ERROR); if(CE_OUT_TMP>CE_MAX_OUT) CE_OUT = CE_MAX_OUT; else if(CE_OUT_TMP<CE_MIN_OUT) CE_OUT = CE_MIN_OUT; else CE_OUT = CE_OUT_TMP; if(CE_ERROR>0) if(CE_OUT_TMP>0)CE_FAWUP=1; else CE_FAWUP=0; else if(CE_ERROR<0) if(CE_OUT_TMP<0)CE_FAWUP=1; else CE_FAWUP=0; else CE_FAWUP=0; if(!((CE_OUT!=CE_OUT_TMP)&&(CE_FAWUP))) CE_SI = CE_SI + (CE_KI*CE_ERROR); if(CE_SI>25000)CE_SI=25000; if(CE_SI<-25000)CE_SI=-25000; return(CE_OUT); // FIM DE CE()
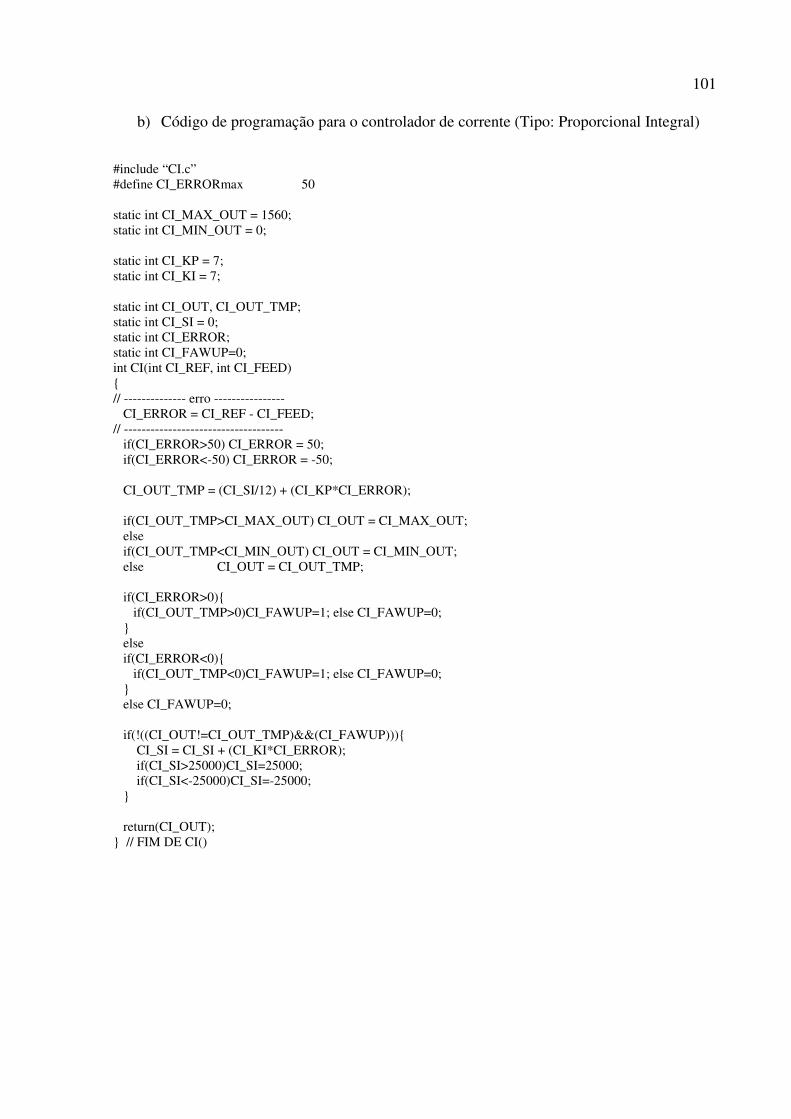
101
b) Código de programação para o controlador de corrente (Tipo: Proporcional Integral) #include “CI.c” #define CI_ERRORmax 50 static int CI_MAX_OUT = 1560; static int CI_MIN_OUT = 0; static int CI_KP = 7; static int CI_KI = 7; static int CI_OUT, CI_OUT_TMP; static int CI_SI = 0; static int CI_ERROR; static int CI_FAWUP=0; int CI(int CI_REF, int CI_FEED) // -------------- erro ---------------- CI_ERROR = CI_REF - CI_FEED; // ------------------------------------ if(CI_ERROR>50) CI_ERROR = 50; if(CI_ERROR<-50) CI_ERROR = -50; CI_OUT_TMP = (CI_SI/12) + (CI_KP*CI_ERROR); if(CI_OUT_TMP>CI_MAX_OUT) CI_OUT = CI_MAX_OUT; else if(CI_OUT_TMP<CI_MIN_OUT) CI_OUT = CI_MIN_OUT; else CI_OUT = CI_OUT_TMP; if(CI_ERROR>0) if(CI_OUT_TMP>0)CI_FAWUP=1; else CI_FAWUP=0; else if(CI_ERROR<0) if(CI_OUT_TMP<0)CI_FAWUP=1; else CI_FAWUP=0; else CI_FAWUP=0; if(!((CI_OUT!=CI_OUT_TMP)&&(CI_FAWUP))) CI_SI = CI_SI + (CI_KI*CI_ERROR); if(CI_SI>25000)CI_SI=25000; if(CI_SI<-25000)CI_SI=-25000; return(CI_OUT); // FIM DE CI()
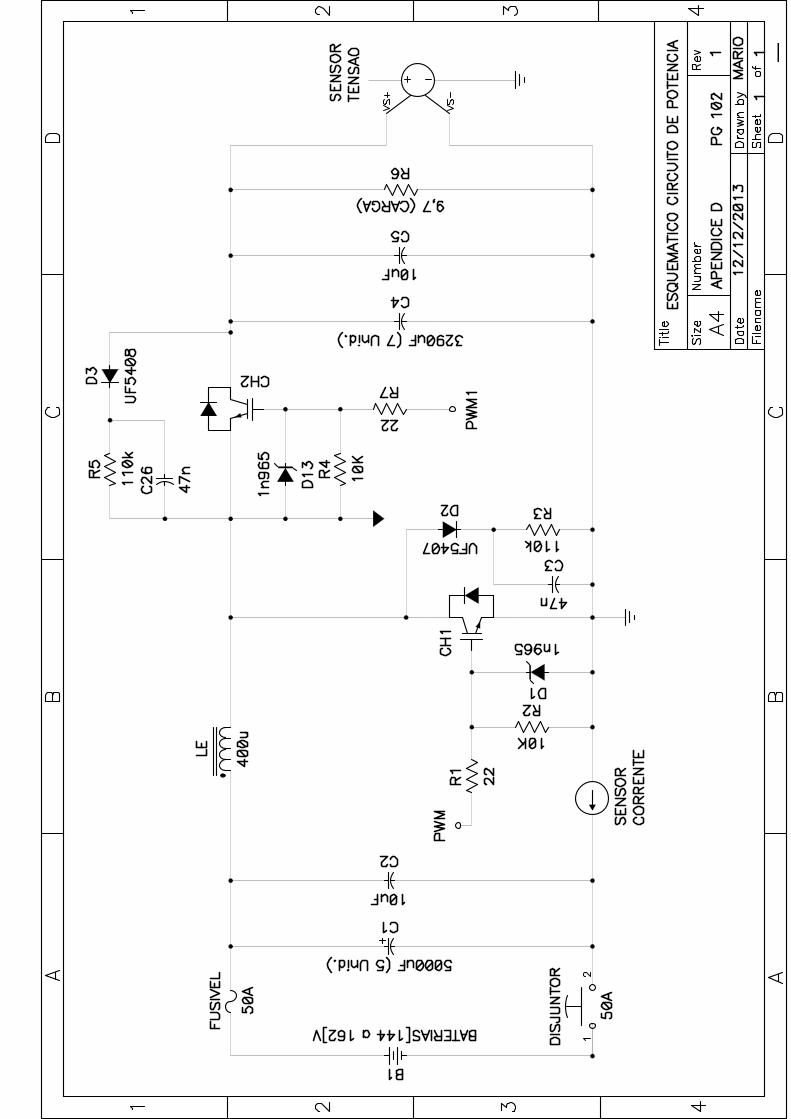
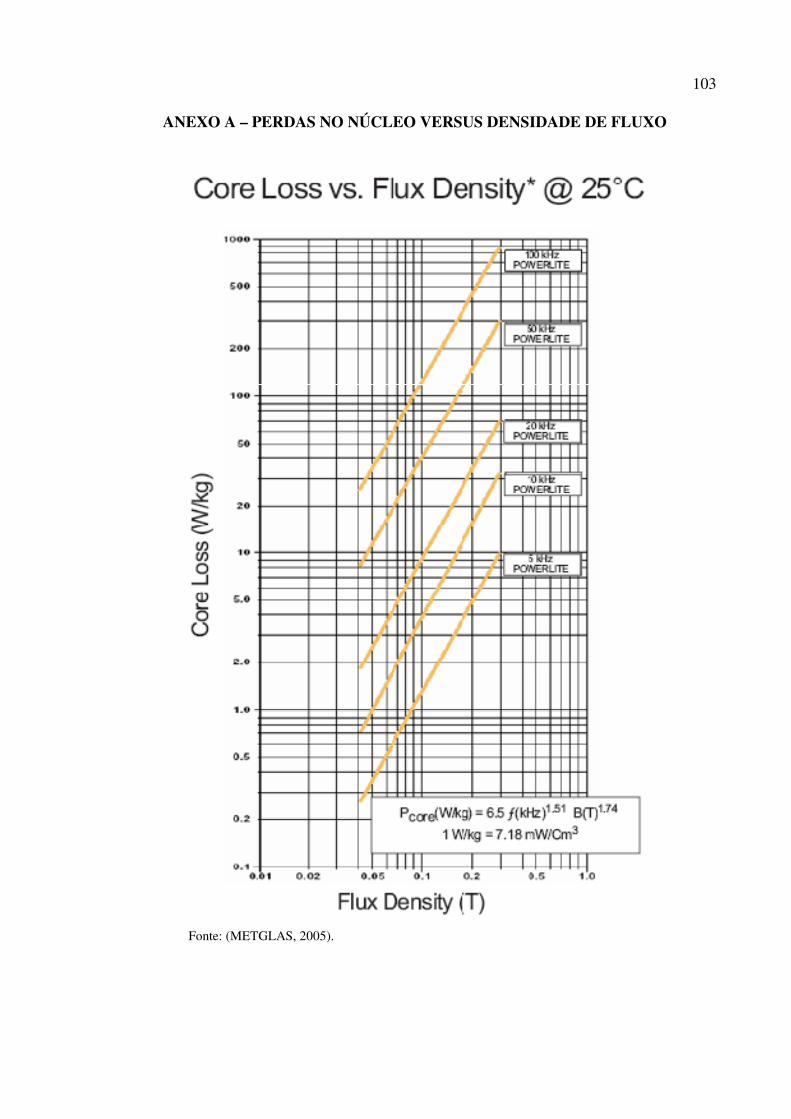
103
ANEXO A – PERDAS NO NÚCLEO VERSUS DENSIDADE DE FLUXO
Fonte: (METGLAS, 2005).