Controllo normale 1.Durante il reaching con il braccio sinistro si attiva LeftTrap 2.During il...
23
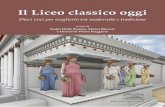
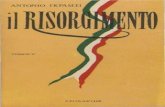
L R R Norm al M: LeftTrap RightTRap -200 0 200 400 600 800 1000 1200 VD_1 NonAHP M: LeftTrap RightTRap AHP M: LeftTrap RightTRap Controllo normale 1.Durante il reaching con il braccio sinistro si attiva LeftTrap 2.During il reaching con il braccio destro si attiva il RightTrap Left movement Right movement - - - - - - - Resting .. ………. M U S C L E S A C T I V I T Y μV
-
Upload
patrick-hurley -
Category
Documents
-
view
214 -
download
0
Transcript of Controllo normale 1.Durante il reaching con il braccio sinistro si attiva LeftTrap 2.During il...

Left movement Right movement Resting
Normal
M: LeftTrap RightTRap-200
0
200
400
600
800
1000
1200V
D_
1
NonAHP
M: LeftTrap RightTRap
AHP
M: LeftTrap RightTRap
Controllo normale
1. Durante il reaching con il braccio sinistro si attiva LeftTrap
2. During il reaching con il braccio destro si attiva il RightTrap
Left movement
Right movement - - - - - - -
Resting ..……….
MUSCLES
ACTIVITY
μV

Left movement Right movement Resting
Normal
M: LeftTrap RightTRap-200
0
200
400
600
800
1000
1200V
D_
1
NonAHP
M: LeftTrap RightTRap
AHP
M: LeftTrap RightTRap
NonAHP
1. Durante il reaching sn si attiva il LeftTrap
2. Durante il reaching ds si attiva il RightTrap
Left movement
Right movement - - - - - - -
Resting ..……….
MUSCLES
ACTIVITY
μV

Left movement Right movement Resting
Normal
M: LeftTrap RightTRap-200
0
200
400
600
800
1000
1200V
D_
1
NonAHP
M: LeftTrap RightTRap
AHP
M: LeftTrap RightTRap
Left movement
Right movement - - - - - - -
Resting ..……….
MUSCLES
ACTIVITY
μV

Left movement Right movement Resting
Normal
M: LeftTrap RightTRap-200
0
200
400
600
800
1000
1200V
D_1
NonAHP
M: LeftTrap RightTRap
AHP
M: LeftTrap RightTRap
Left movement
Right movement - - - - - - -
Resting ..……….
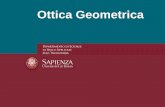
Paziente AHP.
1. Durante il reaching sn si attiva il LeftTrap
2. Durante il reaching ds si attiva il RightTrap is activated3. Durante il reaching sn il RightTrap è più attivo del sn. Però la parte destra è sempre più attiva della sinistra (anche nella condizione di risposo; probabilmente ‘an active process induced by disinhibition, in order to establish new compensatory pathways’ see Ghika et al., 1995; Cao et al., 1998)


CONCLUSION
From the activity registered in the proximal muscles of the affected side we can infer that AHP patient had, similarly to normal subjects, the intention to move
Next question would be: is this intentional response related to the operation of neural mechanisms that govern normal motor behaviour so to influence the motor performance of the intact hand when the patients try to execute bimanual movements?

We decided to use a paradigm proposed by Kelso and coworkers in which the subjects had to reach for easy target (near and large) and difficult target (far and small).
They found that the Movement Time was much shorter for easy target than for difficult target in unimanual performance.
However, when the two conditions were combined they did not find that the limb producing a short movement to an easy target arrived earlier than the limb producing the
difficult movement.
there was a strong tendency for both movements to be initiated and terminated synchronously. In particular, the hand moving to the easy target slowed down when moving with the hand going to the difficult target.

The question is: what happens when an hemiplegic patient with anosognosia, who cannot move the contralesional hand, but is convinced of being able to move it, is asked to perform unimanual and bimanual asymmetric movements?

We slightly modified this paradigm to adapt it to right brain-damaged patients. In the Kelso et al. experiments targets were positioned to the right and left of the starting positions. In our paradigm the targets were positioned on the radial plane to minimise the interaction with visual neglect.
easy
difficult
Hand (Left or Right)
Space (Near or Far)
Action (Unimanual, Ba, Bs)
-normal subjects
-patient with AHP

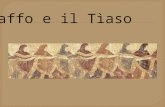
RESULTS IN NORMAL SUBJECTS
Transport time for the left and right hand as function of Space and Action
Far Near
Left hand
Action U Ba Bs100
200
300
400
500
600
700
800
900
Mo
vem
ent
Tim
e
Right hand
Action U Ba Bs
1. LH and RH had similar MT in unimanual condition
Movement Time is much shorter for easy target than for difficult target in unimanual conditions.
1. In bimanual condition the hands’ reaching is simultaneous.
2. In Ba conditions
the hand that reaches for near targets slowed down.
Conclusion: the hands were influenced by the simultaneous acting of the other hand in asymmetrical conditions.

Predictions
• When patients with AHP are asked to perform bilateral reaching movements
They should not attempt bilateral hands movements
No difference in the MT of the R hand in the different conditions of the experiment
No intentionNo intention IntentionIntention
They should attempt bilateral movements
MT of the R hand in the Unilateral and Bilateral conditions should differ

Case report: Patient LM
41-year-old right-handed man
damage in the right hemisphere caused left hemiplegia, left hemianaesthesia and severe personal and extrapersonal left-sided neglect.
We tested him 71 days after the stroke
Well oriented in time and space
had no global reasoning or language problems. He could readily understand and follow test instructions and was very cooperative.

At the time of testing he still showed left hemiplegia and left anaesthesia, whereas personal and extrapersonal neglect were improved
He also showed a severe ansognosia for hes hemiplegia Like CR he believed that he was able to use his left arm and hand and to walk and carry out without any problem several daily activities


Patient and controls’ right hand
Far Near
Patient
ACTION: UR Ba Bs0
200
400
600
800
1000
1200
1400
1600
Mov
emen
t T
ime
Controls
ACTION: UR Ba Bs
- Also in patient LM the action of the right hand in near space is influenced by the simultaneous ‘perceived’ action of the contralesional plegic hand


The intention was not an abstract will related to the previous knowledge of being able to move, but was actually implemented in the muscles fibers activated by the spared cortical circuits for motor programming and movement execution
goes so far as to influence the motor parameter of the right hand when the patients has the false belief of simultaneously moving the left hand.
These experiments strongly suggest that AHP patients do have the intention to move the plegic limb

Next steps
studiare aspetti bimanuali puramente motori studiare coinvolgimento distale attraverso lo studio cinematico del grasping

1. aspetti bimanuali puramente motori


Planner (movement selection)
Limb World
Sensory Information/actual state
Goals/Prior intention
Efference copy
Forward model (Movement predictor/predicted state)
BSense of agency
A Comparator
Urge to move/intention Cx
x
Desired state
Motor awareness
comparator
affordances
In A, the comparator; in B, the predictor; in C, the locus of emergence of intention to move. According to our hypothesis:
1. a damage to the comparator that has to match the prediction with the actual state of the system prevents the detection of the difference between the movement/no movement conditions.
2. A part of the motor system functions normally. Patients have intentions and make predicitons. This leads to the construction of a non-veridical motor awareness that may represent the bases of the firm belief of being still able to move.
The discrepancy is not detected
Anosognosia
comparator
Berti and Pia, 2007

Gabriella Bottini Department of Pyshcology, University of Pavia
Eraldo Paulesu Department of Pyshcology, University of Milano Bicocca
Martina Gandola Department of Pyshcology, University of Pavia
Nicola Smania Rehabilitation Unit, Verona Hospital
Andrea Stracciari Neurology Unit, Sant’Orsola Hospital, Bologna
Lorenzo Pia
Lucia SpinazzolaDepartment of Pyshcology, Turin University
Grazie a voi e a:

Goals/Prior intention
Sense of agency
Urge to move/intention
Motor awareness
affordances








![1BDJGJD +PVSOBM PG .BUIFNBUJDT - MSP · abelian groups [6] in 1937, many attempts have been made to give structure theorems for classes of torsion-free abelian groups reaching beyond](https://static.fdocument.org/doc/165x107/60f7aaba7069f719c90d5ee2/1bdjgjd-pvsobm-pg-buifnbujdt-msp-abelian-groups-6-in-1937-many-attempts-have.jpg)